Система управления объектом в пространстве - RU2679691C1
Код документа: RU2679691C1
Чертежи
Описание
Изобретение относится к технике, позволяющей управлять объектом в пространстве без применения механической, аэродинамической или реактивных систем.
Из уровня техники известно применение двух маховиков для разворота объекта в пространстве без механической, аэродинамической либо реактивной тяги. Описаны двигатели-маховики ДМ1 и ДМ2 имеют совершенно идентичные характеристики. При создании управляющего момента путем разгона маховика ДМ1 в течение времени t1, после его выключения включается на некоторое время ДМ2, имеющего противоположное направление вращения. Изменения угловой скорости ДМ при его включении (разгоне) и выключении (торможении), что очевидно и приведет к развороту или повороту объекта (см. Суббота А.М., Резникова О.В., Андрущенко Т.Н., Особенности применения двигателей-маховиков на малых космических аппарата, Авиационно-космическая техника и технология, 2012, №4). При этом известная система позволяет провести разворот или поворот лишь в одной плоскости, т.к. изменение угловой скорости ДМ происходит лишь в одной плоскости пространства.
Также известна система, описанная в статье В. В. Пирогов, Исследование процесса стабилизации положения оси вращения несущего тела маятниковым автобалансиром, Восточно-Европейский журнал передовых технологий. - 2016. - № 2(7). - С. 49-63. Особенностями системы, состоящей из космический аппарат (КА) стабилизированного вращением и демпфера угла нутации или автобалансиров (АБ) Система, состоящая из КА стабилизированного вращением и демпфера угла нутации или АБ, имеет следующие важные особенности: 1) система 6 рассматривается как изолированная (ИС), с вязким рассеиванием (диссипацией) энергии, состоящая из вращающегося несущего тела (НТ) и присоединенных к нему тел (ПТ); 2) относительным движениям ПТ препятствуют силы вязкого сопротивления (внутренние диссипативные силы); 3) так как система изолированная, то для нее имеют место законы сохранения движения центра масс (за центр масс и начало отсчета системы принимаем точку G) rG = 0 (1) и кинетического момента системы KG=const, (2) где в (1) и (2) rG – радиус-вектор точки G, KG – вектор кинетического момента ИС, найденный относительно ее центра масс; 4) у конкретных ИС, состоящих из НТ и ПТ, которые образуют пассивные АБ, существуют основные и побочные установившиеся движения. На основных движениях, в которых наступает стабилизация положения оси вращения НТ, продольная ось НТ совпадает с его осью вращения, а на побочных – нет. В рассматриваемой ИС, в которой ПТ образуют маятниковые или шаровые пассивные АБ, в отличие от известных, вместе с изолированными установившимися движениями могут появляться одно- или многопараметрические семьи установившихся движений. Поскольку на практике осуществляются только устойчивые движения, то исследование таких ИС сводится к выделению установившихся движений и исследованию их на условную устойчивость (при условии, что имеют место законы сохранения движения центра масс и кинетического момента системы). Исследование условной устойчивости установившихся движений удобно проводить относительно подвижных осей, в связи с чем условная устойчивость установившихся движений рассматривается для относительного положения равновесия ИС. Известная система позволяет стабилизировать объект в пространстве. Однако известная система не позволяет управлять положением и ориентацией объекта в пространстве.
Кроме того из уровня техники известен летательный аппарат, задача которого состоит в повышении полетной маневренности летательного аппарата за счет придания крыльям возможности поворота вокруг осевой линии, пролегающей вдоль каждого крыла. Летательный аппарат содержит фюзеляж с кабиной экипажа, пассажирским и/или грузовым отсеками, шасси, установленные по обе стороны фюзеляжа подвижные крылья, авиационные двигатели, каждое крыло с торца его широкой части имеет жестко связанный с ним плоский/выпуклый диск, установленный в стенке фюзеляжа с возможностью неполного/полного поворота. Диски крыльев имеют индивидуальные/общие приводы синхронного поворота. Фюзеляж выполнен в форме шара, в нижней части которого расположены один над другим два маховика, имеющие возможность вращения в противоположных направлениях. Фюзеляж выполнен в форме шара, в верхней части которого расположены парашютная камера с парашютом, причем вокруг парашютной камеры закреплены баллоны с газом легче воздуха (RU 2407672 C1 27.12.2010 г.). Известная система позволяет управлять положением и ориентацией в пространстве, однако не позволяет выполнять стабилизацию положения объекта в пространстве при воздействии внешних сил.
Также недостатками известных устройств и систем являются управление положением и стабилизацией объекта в пространстве с использованием только одного устройства управления, содержащего два вращающихся в разные стороны объекта, выполненные с возможностью накапливать кинетическую энергию и/или создания инерционного момента.
Технический результат заявленной системы заключается в повышении и облегчении управления объектом в пространстве, а также в стабилизации объекта при воздействии внешних сил без использования механической, аэродинамической и реактивной систем управления, что предоставит возможность стабилизировать объекты например: боковой перекос самолета от порыва ветра, аварийная посадка самолета (без двигателя), кабрирование самолета, управляемый разворот авто и так далее, в возможности управления и стабилизации объекта в пространстве управления разворотом любого свободного объекта в пространстве, в любой из известных нам сред без взаимодействия со средой. Кроме того заявляемая система позволит повысить управляемость объекта в пространстве, что предоставит возможность стабилизировать объекты например: боковой перекос самолета от порыва ветра, аварийная посадка самолета (без двигателя), кабрирование самолета, управляемый разворот авто и так далее
Указанный технический результат реализуется за счет следующих особенностей конструкции.
Система управления объектом в пространстве, содержит, по меньшей мере два устройства управления и стабилизации объекта в пространстве. Система включает устройство крепления по меньшей мере двух устройств управления и стабилизации объекта в пространстве к объекту управления. При этом первый вращающийся элемент, выполненный с возможностью накапливать кинетическую энергию и/или создания инерционного момента. Второй вращающийся элемент, выполненный с возможностью накапливать кинетическую энергию и/или создания инерционного момента. Причем первый и второй вращающиеся элементы имеют одинаковые массовые моменты инерции и вращаются в разные стороны, а оси упомянутых элементов проходят через центр тяжести устройств управления и стабилизации объекта в пространстве. При этом система дополнительно выполнена с возможностью увеличение или уменьшение кинетической энергии первого вращающегося элемента, для изменения положения и/или стабилизации положения объекта в пространстве. Увеличение или уменьшение кинетической энергии второго вращающегося элемента, для изменения положения и/или стабилизации положения объекта в пространстве. Использование эффекта гироскопа, возникающего за счёт вращения первого и/или второго вращающегося элемента, для изменения положения и/или стабилизации объекта в пространстве. Кроме того использование по крайней мере двух устройств управления и стабилизации объекта в пространстве таким образом, что возникает эффект «рычага», где плечом является оболочка объекта управления для изменения положения и/или стабилизации объекта в пространстве. Использование эффекта гироскопа при взаимодействии по меньшей мере двух устройств управления и стабилизации объекта в пространстве таким образом, что возникает эффект «рычага», где плечом является оболочка объекта управления для изменения положения или стабилизации объекта в пространстве.
При этом первый и второй вращающийся элементы могут быть выполнены в виде: круга или тора или их аналогов.
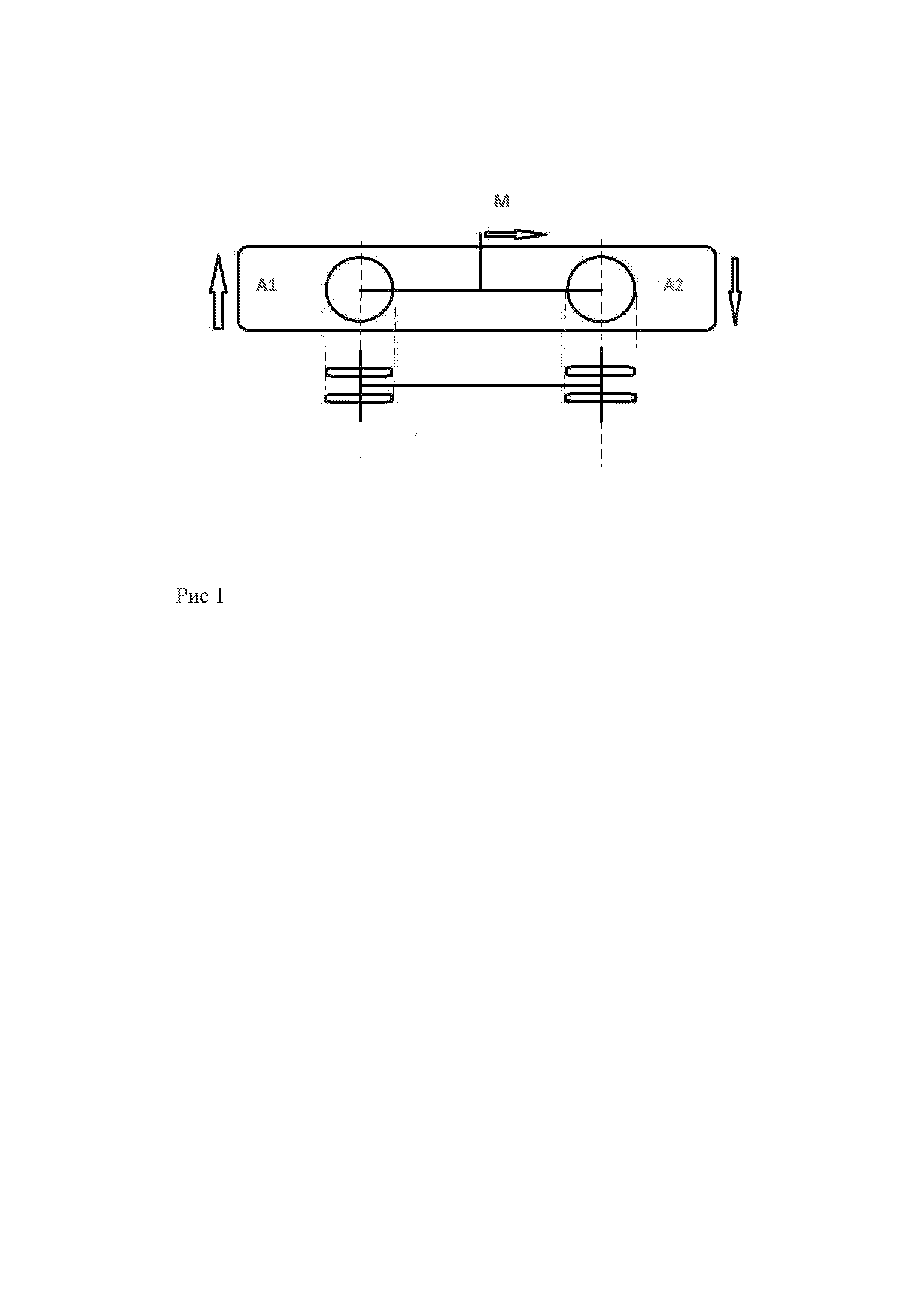
Система также выполнения с возможностью использования двух устройств управления и стабилизации объекта в пространстве таким образом, что возникает эффект «рычага», где плечом является оболочка объекта управления (рис 1) для изменения положения и/или стабилизации объекта в пространстве, взаимодействие систем А1 и А2 каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект рычага М при увеличении или уменьшения кинетической энергии частей системы А1 и А2.
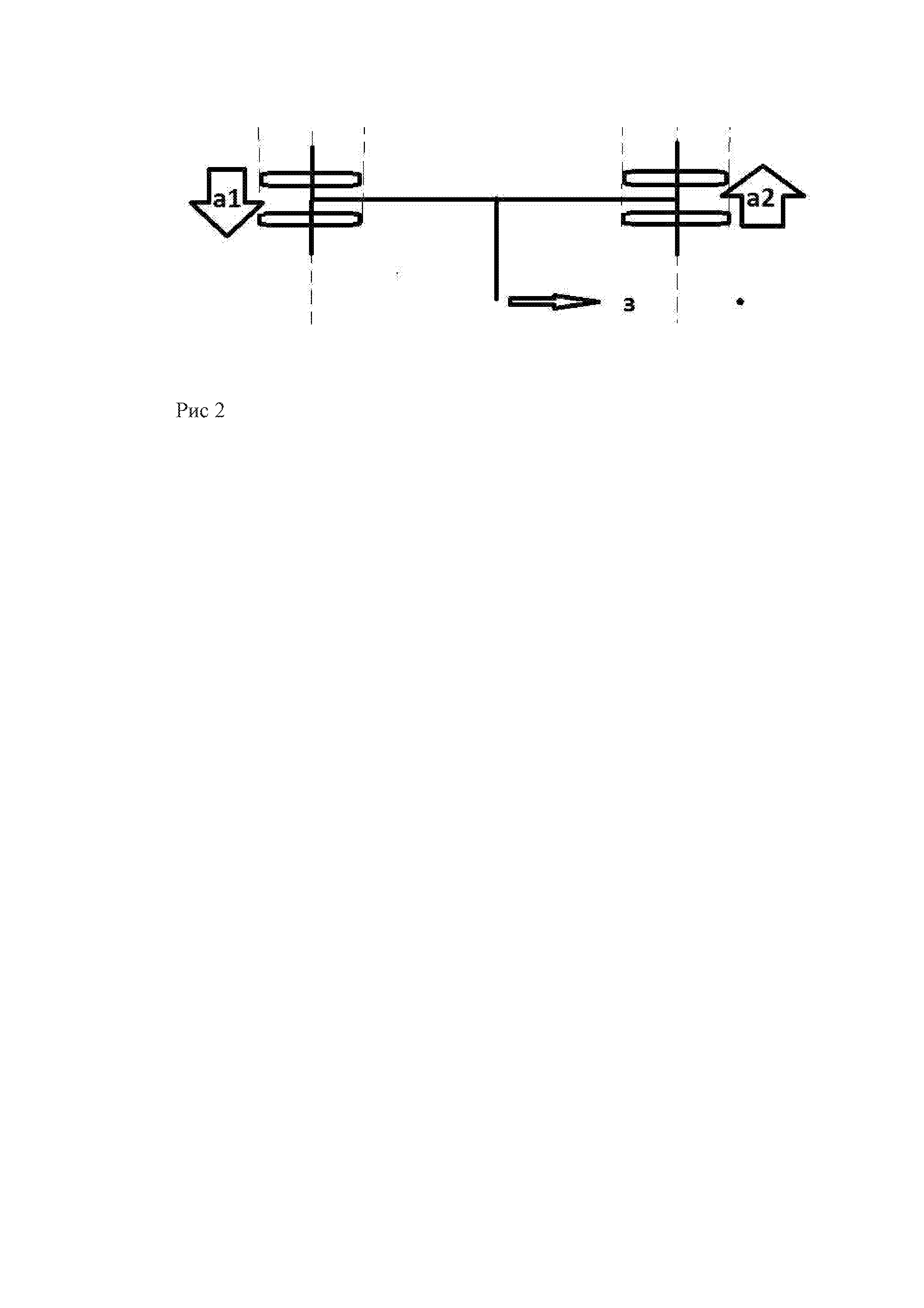
Система также выполнения с возможностью использования эффекта гироскопа (Рис 2) при взаимодействии, двух устройств управления и стабилизации объекта в пространстве таким образом, что возникает эффект «рычага», где плечом является оболочка объекта управления для изменения положения или стабилизации объекта в пространстве. Взаимодействие систем А1 и А2 каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект З при изменении положения относительно друг друга по оси вращения систем А1 и А2.
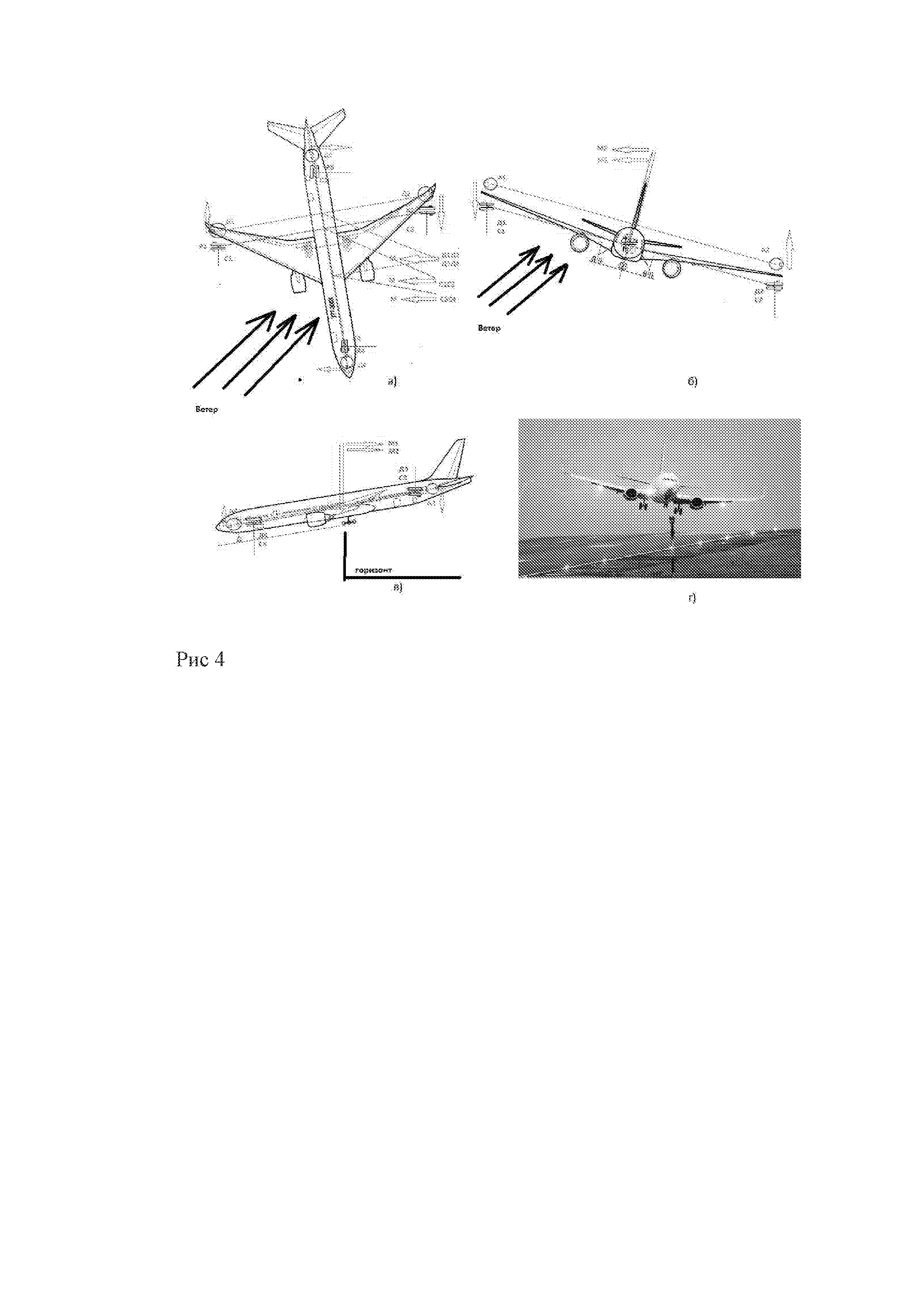
Система также выполнения с возможностью взаимодействия систем Д1 Д2 Д3 Д4 (рис 4а) каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М Д1 Д2 Д3 Д4 при увеличении или уменьшения кинетической энергии частей системы Д1 Д2 Д3 Д4 который компенсирует (купирует) порыв ветра или разворачивает самолет в нужном направлении.
Система также выполнена с возможностью взаимодействия систем А1 и А2 (рис 4б), каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М1 при увеличении или уменьшения кинетической энергии частей системы А1 и А2 для возможности взлета или посадки выравнивает самолет.
Система также выполнена с возможностью взаимодействия систем Д1 и Д2 (рис 4б) каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М2 при изменении положения относительно друг друга по оси вращения С1 С2 систем Д1 и Д2 для возможности взлета или посадки выравнивает самолет.
Примеры реализации изобретения
Пример 1:
Возможность управления объектами без дополнительного взаимодействия с окружающей средой.
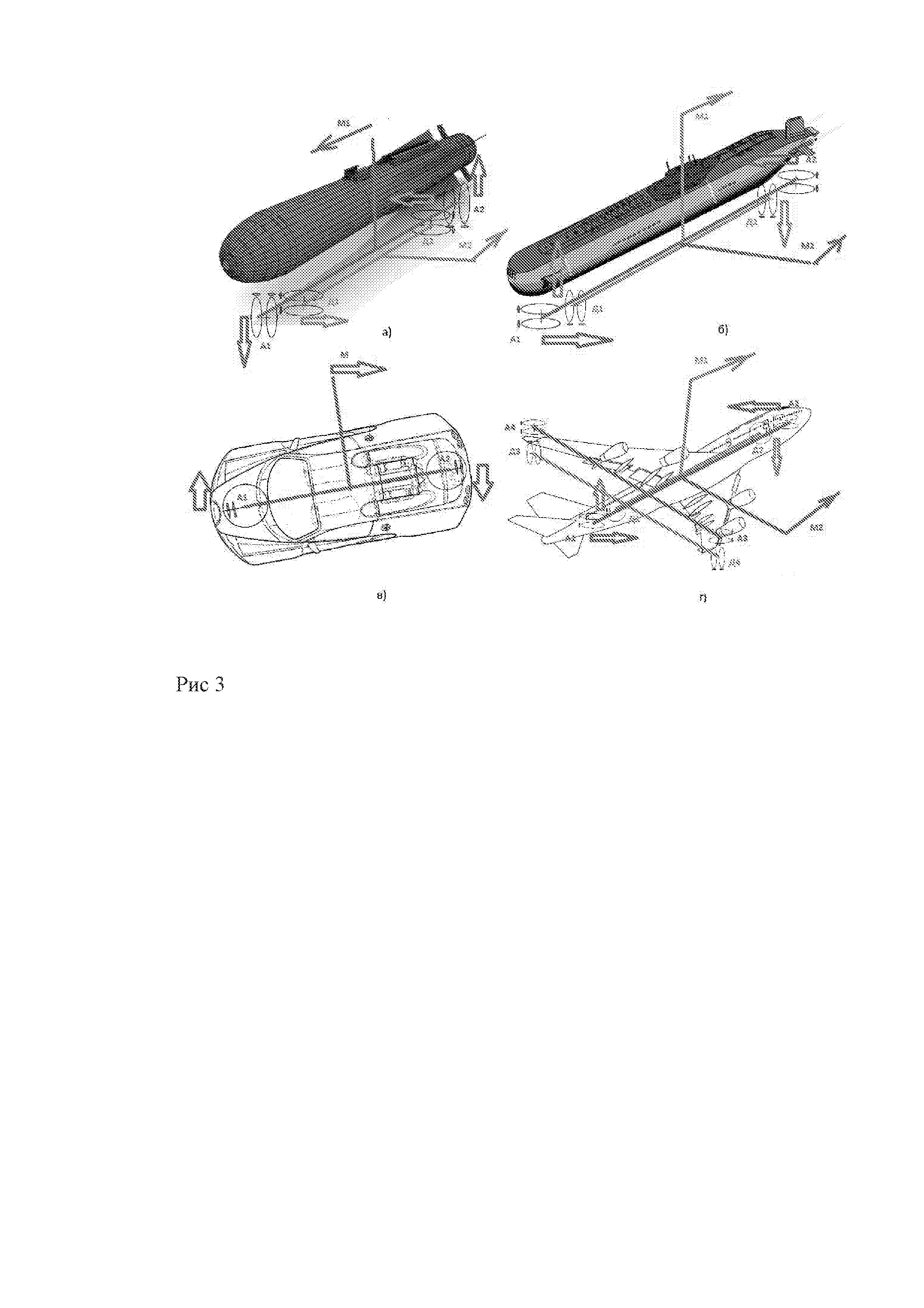
Ракета (рис 3а)
Управление во всех плоскостях
взаимодействие систем А1 и А2 каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М1 при увеличении или уменьшения кинетической энергии частей системы А1 и А2.
взаимодействие систем Д1 и Д2 каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М2 при увеличении или уменьшения кинетической энергии частей системы Д1 и Д2.
взаимодействие систем А1 и А2 каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М2 при изменении положения относительно друг друга по оси вращения систем А1 и А2
взаимодействие систем Д1 и Д2 каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М1 при изменении положения относительно друг друга по оси вращения систем Д1 и Д2
Пример 2:
Подводная лодка (рис 3б)
Управление во всех плоскостях
взаимодействие систем А1 и А2 каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М1 при увеличении или уменьшения кинетической энергии частей системы А1 и А2.
взаимодействие систем Д1 и Д2 каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М2 при увеличении или уменьшения кинетической энергии частей системы Д1 и Д2.
взаимодействие систем А1 и А2 каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М2 при изменении положения относительно друг друга по оси вращения систем А1 и А2
взаимодействие систем Д1 и Д2 каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М1 при изменении положения относительно друг друга по оси вращения систем Д1 и Д2
Пример 3:
Самолет (рис 3г)
Управление во всех плоскостях
взаимодействие систем А1 А2 А3 А4 каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М2 при увеличении или уменьшения кинетической энергии частей системы А1 А2 А3 А4 .
взаимодействие систем Д1 и Д2 каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М1 при увеличении или уменьшения кинетической энергии частей системы Д1 и Д2.
взаимодействие систем А1 и А2 каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М1 при изменении положения относительно друг друга по оси вращения систем А1 и А2
Пример 4:
Автомобиль (рис 3в)
Управление в одной плоскости: управляемый разворот стабилизации курсовой устойчивости.
взаимодействие систем А1 и А2 каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М при увеличении или уменьшения кинетической энергии частей системы А1 и А2.
Так же возможно использование эффекта гироскопа.
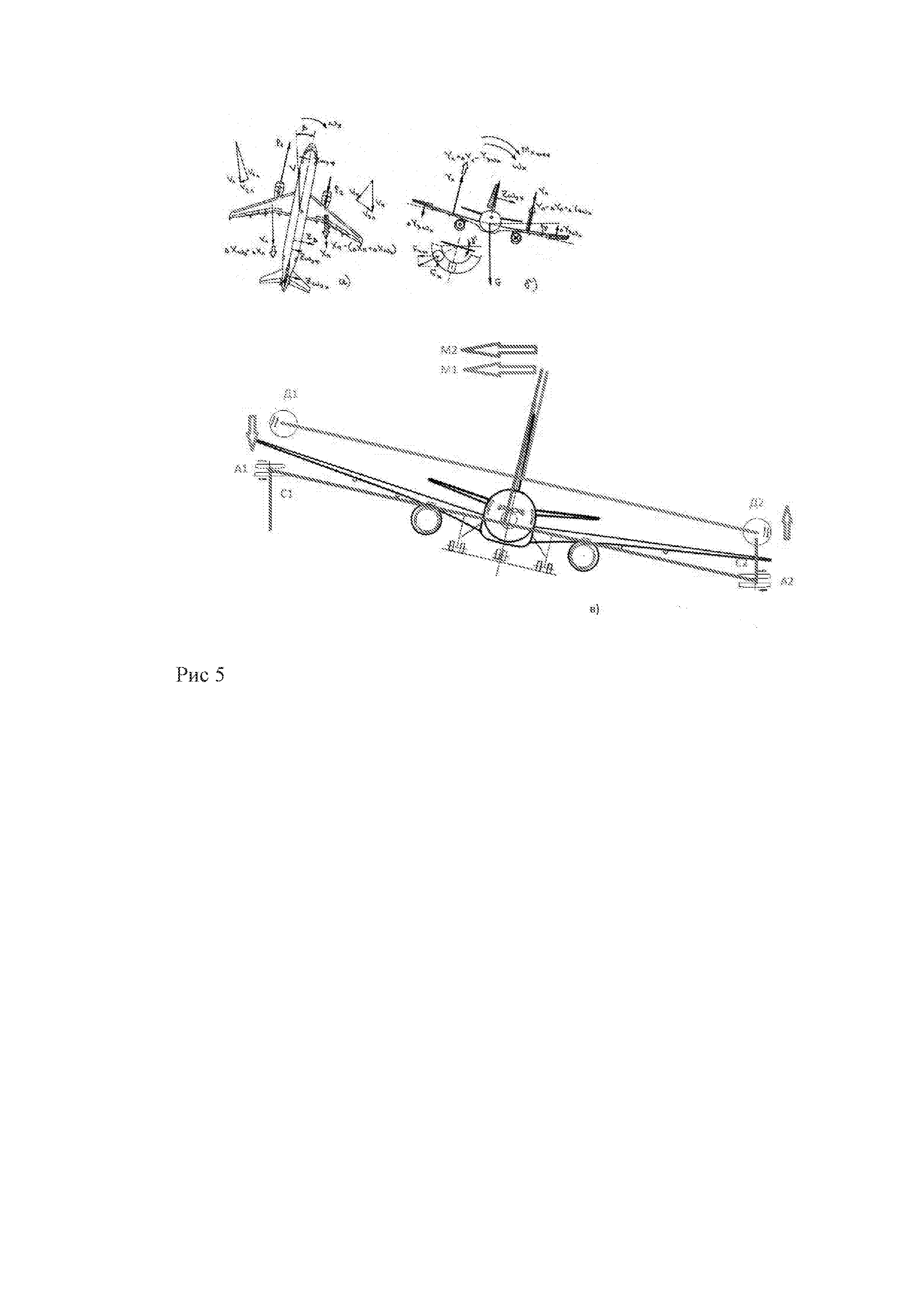
Пример 5:
Устранение кренов при несимметричной тяге (отказ двигателя).
Посадка самолета без одного шасси.
Купирование критических кренов самолета
Возможность управления самолетом без элеронов и рулей (обледенение).
взаимодействие систем Д1 и Д2 (рис 5в) каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М1 при увеличении или уменьшения кинетической энергии частей системы А1 и А2 для устранения кренов в полете или возможности посадки самолета.
взаимодействие систем А1 и А2 (рис 5в) каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М2 при изменении положения относительно друг друга по оси вращения С1 С2 систем Д1 и Д2 для устранения или купирование критических кренов в полете или возможности посадки самолета.
взаимодействие систем Д1 и Д2 (рис 4в) каждая из которых состоит из двух маховиков, вращающихся в разные стороны. При взаимодействии создают эффект М2 при изменении положения относительно друг друга по оси вращения С1 С2 систем Д1 и Д2 для устранения или купирование критических кренов в полете или возможности посадки самолета.
Реферат
Система управления объектом в пространстве содержит не менее двух устройств управления и стабилизации объекта в пространстве. Устройство управления и стабилизации объекта в пространстве содержит два вращающихся элемента с одинаковыми массовыми моментами инерции и вращающимися в разные стороны и устройство их крепления. Обеспечивается изменение или стабилизация объекта в пространстве. 1 з.п. ф-лы, 5 ил.
Комментарии