Контроллер для автономного транспортного средства и способ контроля полосы автономным транспортным средством - RU2705885C1
Код документа: RU2705885C1
Чертежи




Описание
Уровень техники
Область техники, к которой относится изобретение
[001] Данное изобретение относится к выполнению объезда помех в автономных транспортных средствах.
Уровень техники
[002] Во многих переполненных городских территориях, таких как Сан-Франциско, Калифорния, или Лондон, Великобритания, мотоциклисты зачастую обгоняют медленные или остановленные транспортные средства в трафике за счет движения между полосами движения, а именно, за счет движения между рядами. Это представляет собой очень опасные действия при вождении, поскольку водителям в соседних транспортных средствах трудно обнаруживать такие действия, в частности, когда полосы движения сливаются. Даже для будущих автономных транспортных средств, которые могут иметь встроенные сенсорные системы с круговым (360 градусов) обзором, затруднительно идентифицировать быстро движущиеся объекты, такие как мотоциклы, сменяющие полосу движения на гораздо более высоких относительных скоростях. Данная трудность в силу этого представляет собой проблемы для всех наборов и алгоритмов считывания. Это еще более проблематично, если объекты или транспортные средства перекрывают сенсорную систему.
[003] Системы и способы, раскрытые в данном документе, предоставляют подход для повышения уровня безопасности движущихся между рядами мотоциклистов.
Краткое изложение существа изобретения
Согласно первому аспекту изобретения предложен контроллер для автономного транспортного средства, содержащий: одно или более обрабатывающих устройств, запрограммированных с возможностью: принимать уведомление из первого транспортного средства, причем уведомление указывает то, что первое транспортное средство движется между рядами; передавать подтверждение приема уведомления в первое транспортное средство; и в ответ на уведомление, ограничивать перемещение автономного транспортного средства в область между полосами движения, смежную с полосой движения, в которой движется автономное транспортное средство, причем одно или более обрабатывающих устройств дополнительно запрограммированы с возможностью координировать мигание фонарей с одним или более другими транспортными средствами, чтобы задавать зону движения между рядами вдоль области между полосами движения.
Согласно одному варианту осуществления контроллера одно или более обрабатывающих устройств дополнительно запрограммированы с возможностью передавать подтверждение приема в первое транспортное средство посредством передачи беспроводного сигнала в первое транспортное средство.
Согласно другому варианту осуществления контроллера одно или более обрабатывающих устройств дополнительно запрограммированы с возможностью передавать подтверждение приема в первое транспортное средство посредством мигающих фонарей, расположенных на стороне автономного транспортного средства, обращенной к области между полосами движения.
Согласно другому варианту осуществления контроллера одно или более обрабатывающих устройств дополнительно запрограммированы с возможностью перенаправлять уведомление в одно или более других транспортных средств, смежных с упомянутым транспортным средством и расположенных на любой стороне от области между полосами движения.
Согласно другому варианту осуществления контроллера одно или более обрабатывающих устройств дополнительно запрограммированы с возможностью ограничивать перемещение автономного транспортного средства в область между полосами движения посредством воздержания от выполнения смен полосы движения.
Согласно другому варианту осуществления контроллера одно или более обрабатывающих устройств дополнительно запрограммированы с возможностью ограничивать перемещение автономного транспортного средства в область между полосами движения посредством отъезда автономного транспортного средства от области между полосами движения.
Согласно другому варианту осуществления контроллера одно или более обрабатывающих устройств дополнительно запрограммированы с возможностью: обнаруживать смену полосы движения через область между полосами движения, активируемую посредством одного из водителя автономного транспортного средства и контроллера; в ответ на обнаружение смены полосы движения, передавать второе уведомление в первое транспортное средство по протоколу беспроводной связи между транспортными средствами, причем второе уведомление указывает то, что автономное транспортное средство собирается выполнять смену полосы движения.
Согласно другому варианту осуществления контроллера одно или более обрабатывающих устройств соединены, по меньшей мере, с одним из актуатора рулевого управления, актуатора акселератора и тормозного актуатора; и при этом один или более процессоров дополнительно запрограммированы с возможностью ограничивать перемещение автономного транспортного средства в область между полосами движения посредством активации одного или более из актуатора рулевого управления, актуатора акселератора и тормозного актуатора, чтобы ограничивать перемещение в область между полосами движения.
Согласно другому варианту осуществления контроллера одно или более обрабатывающих устройств дополнительно соединены с одним или более сенсорных устройств; и при этом одно или более обрабатывающих устройств дополнительно запрограммированы с возможностью: принимать один или более выходных сигналов из одного или более сенсорных устройств; идентифицировать набор потенциальных помех из выходных сигналов одного или более сенсорных устройств; оценивать возможные столкновения между автономным транспортным средством и набором потенциальных помех; и активировать, по меньшей мере, одно из актуатора рулевого управления, актуатора акселератора и тормозного актуатора автономного транспортного средства, эффективное для предотвращения столкновений с набором потенциальных помех и первым транспортным средством.
Согласно второму аспекту изобретения предложен способ, содержащий этапы, на которых: принимают, посредством контроллера автономного транспортного средства, уведомление из первого транспортного средства, причем уведомление указывает то, что первое транспортное средство движется между рядами, причем контроллер включает в себя одно или более обрабатывающих устройств; передают, посредством контроллера, подтверждение приема уведомления в первое транспортное средство; и в ответ на уведомление, ограничивают, посредством контроллера, перемещение автономного транспортного средства в область между полосами движения, смежную с полосой движения, в которой движется автономное транспортное средство, причем способ дополнительно содержит этап, на котором координируют, посредством контроллера, мигание фонарей с одним или более другими транспортными средствами, чтобы задавать зону движения между рядами вдоль области между полосами движения.
Согласно одному варианту осуществления способ дополнительно содержит этап, на котором передают подтверждение приема в первое транспортное средство посредством передачи беспроводного сигнала в первое транспортное средство.
Согласно другому варианту осуществления способа передача подтверждения приема в первое транспортное средство содержит этап, на котором активируют, посредством контроллера, мигающие фонари, расположенные на стороне автономного транспортного средства, обращенной к области между полосами движения.
Согласно другому варианту осуществления способ дополнительно содержит этап, на котором перенаправляют уведомление в одно или более других транспортных средств, смежных с упомянутым транспортным средством и расположенных на любой стороне от области между полосами движения.
Согласно другому варианту осуществления способа ограничение перемещения автономного транспортного средства в область между полосами движения дополнительно содержит этап, на котором воздерживаются от выполнения смен полосы движения.
Согласно другому варианту осуществления способа ограничение перемещения автономного транспортного средства в область между полосами движения дополнительно содержит этап, на котором выполняют смены полосы движения на меньшей скорости.
Согласно другому варианту осуществления способ дополнительно содержит этапы, на которых: обнаруживают, посредством контроллера, смену полосы движения через область между полосами движения, активируемую посредством одного из водителя автономного транспортного средства и контроллера; в ответ на обнаружение смены полосы движения, передают, посредством контроллера, второе уведомление в первое транспортное средство по протоколу беспроводной связи между транспортными средствами, причем второе уведомление указывает то, что автономное транспортное средство собирается выполнять смену полосы движения.
Согласно другому варианту осуществления способа контроллер соединен, по меньшей мере, с одним из актуатора рулевого управления, актуатора акселератора и тормозного актуатора, причем способ дополнительно содержит этап, на котором: ограничивают перемещение автономного транспортного средства в область между полосами движения посредством активации одного или более из актуатора рулевого управления, актуатора акселератора и тормозного актуатора, чтобы ограничивать перемещение в область между полосами движения.
Согласно другому варианту осуществления способ дополнительно содержит этапы, на которых: принимают, посредством контроллера, один или более выходных сигналов из одного или более сенсорных устройств; идентифицируют, посредством контроллера, набор потенциальных помех из выходных сигналов одного или более сенсорных устройств; оценивают, посредством контроллера, возможные столкновения между автономным транспортным средством и набором потенциальных помех; и активируют, посредством контроллера, по меньшей мере, одно из актуатора рулевого управления, актуатора акселератора и тормозного актуатора автономного транспортного средства, эффективное для предотвращения столкновений с набором потенциальных помех и первым транспортным средством.
Краткое описание чертежей
[004] Для простого понимания преимуществ изобретения, более подробное описание изобретения, кратко описанного выше, приводится в отношении конкретных вариантов осуществления, проиллюстрированных на прилагаемых чертежах. С пониманием того, что эти чертежи иллюстрируют только типичные варианты осуществления изобретения и в силу этого не должны рассматриваться как ограничивающие его объем, изобретение описывается и поясняется более конкретно и подробно посредством использования прилагаемых чертежей, на которых:
[005] Фиг. 1 является принципиальной блок-схемой системы для реализации вариантов осуществления изобретения;
[006] Фиг. 2 является принципиальной блок-схемой примерного вычислительного устройства, подходящего для реализации способов в соответствии с вариантами осуществления изобретения;
[007] Фиг. 3 является принципиальной схемой, иллюстрирующей автономное транспортное средство в трафике, включающее в себя движущегося между рядами мотоциклиста;
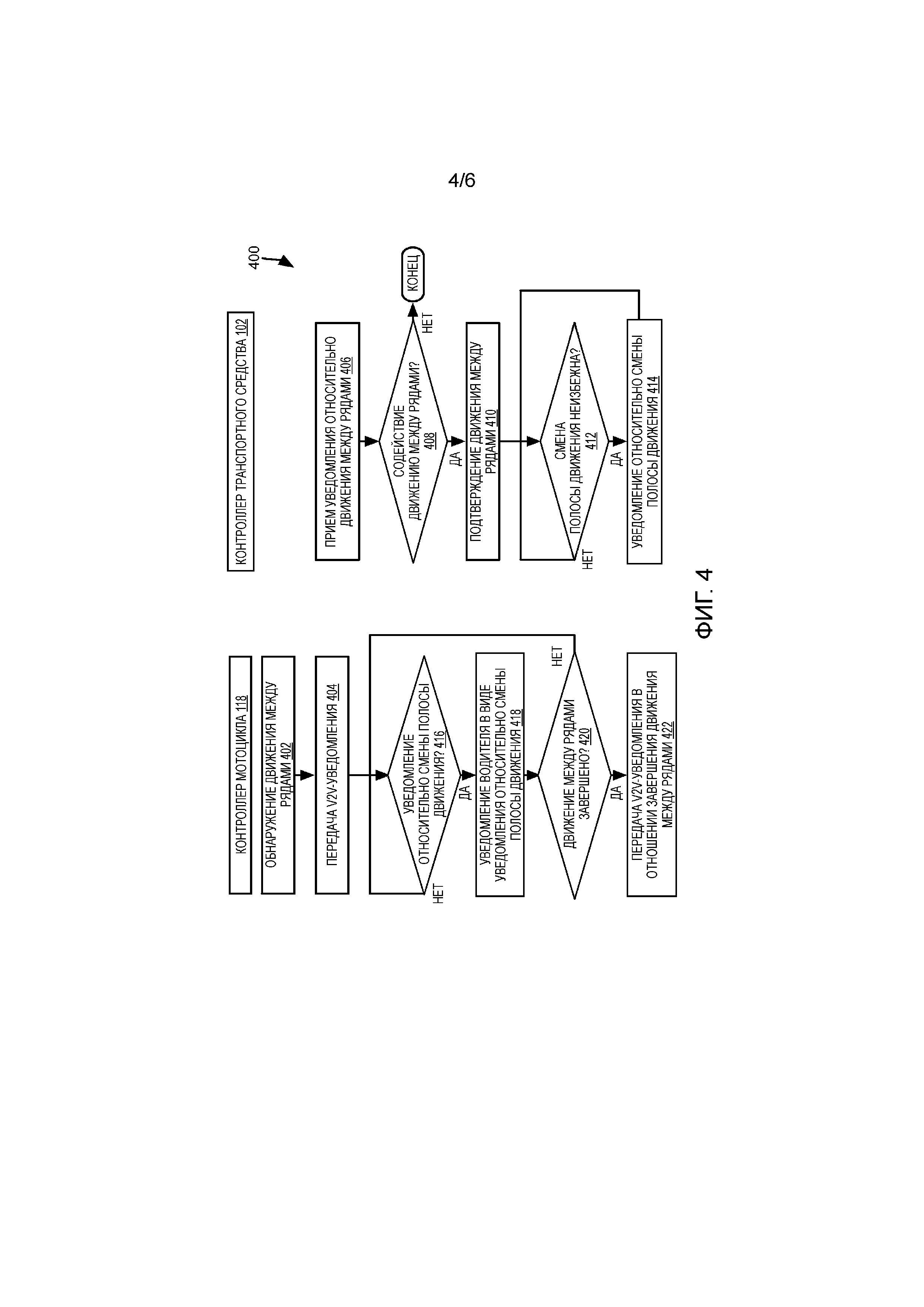
[008] Фиг. 4 является схемой последовательности операций обработки способа для повышения безопасности движущихся между рядами мотоциклистов в соответствии с вариантом осуществления изобретения;
[009] Фиг. 5 и 6 являются примерными изображениями, используемыми для определения того, движется или нет мотоцикл между рядами; и
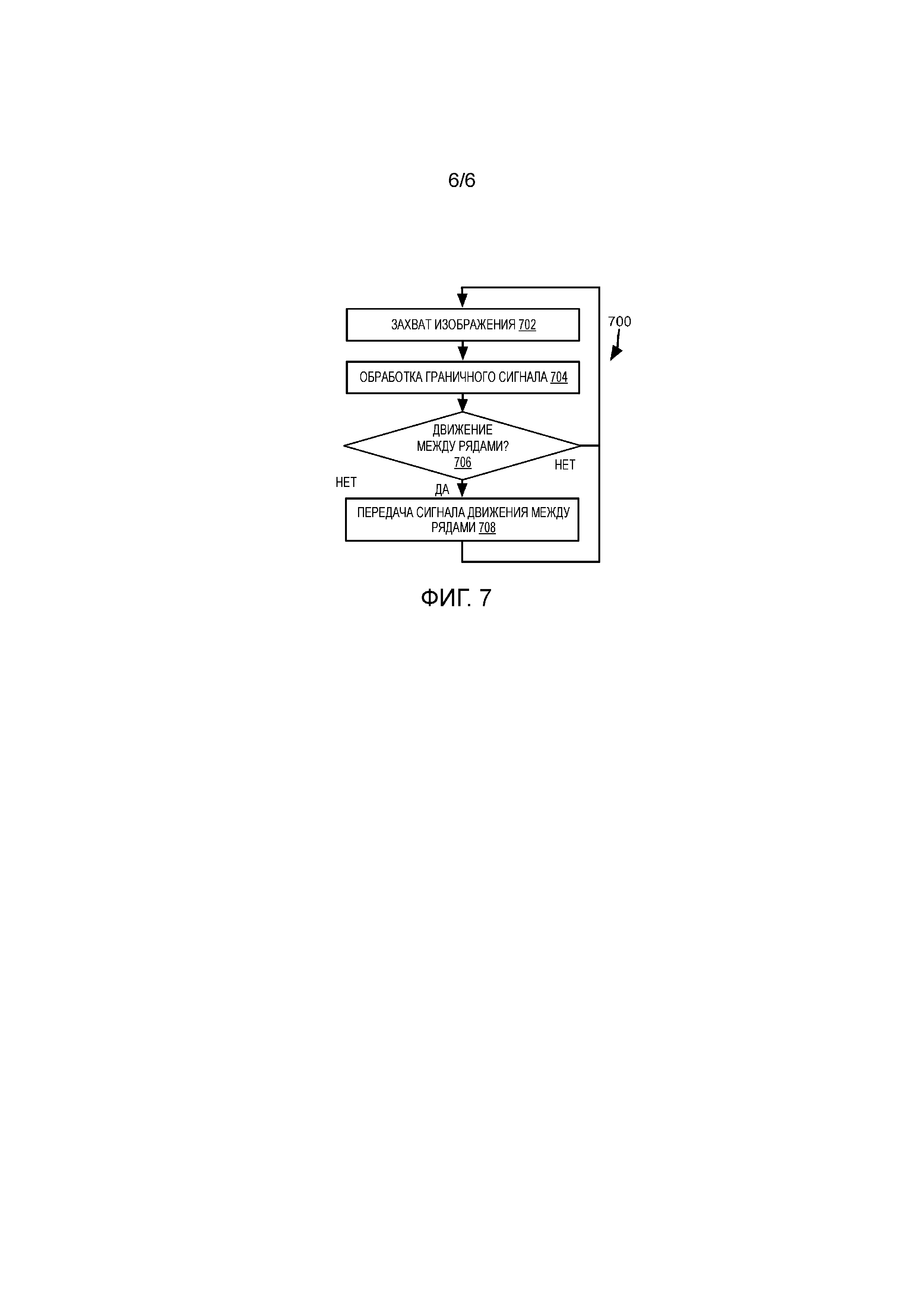
[0010] Фиг. 7 является схемой последовательности операций обработки способа для определения того, движется или нет мотоцикл между рядами.
Подробное описание изобретения
[0011] Следует легко понимать, что компоненты настоящего изобретения, как, в общем, описано и проиллюстрировано на чертежах в данном документе, могут компоноваться и проектироваться в широком спектре различных конфигураций. Таким образом, нижеприведенное подробное описание вариантов осуществления изобретения, как представлено на чертежах, не имеет намерение ограничивать объем изобретения, как заявлено, а просто представляет определенные примеры текущих предполагаемых вариантов осуществления в соответствии с изобретением. Текущие описанные варианты осуществления должны лучше всего пониматься со ссылками на чертежи, на которых аналогичные части обозначаются аналогичными номерами.
[0012] Варианты осуществления в соответствии с настоящим изобретением могут быть осуществлены в качестве устройства, способа или компьютерного программного продукта. Соответственно, настоящее изобретение может принимать форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления (включающего в себя микропрограммное обеспечение, резидентное программное обеспечение, микрокод и т.д.) или варианта осуществления, комбинирующего программные и аппаратные аспекты, которые могут совместно, в общем, упоминаться в данном документе как "модуль" или "система". Кроме того, настоящее изобретение может принимать форму компьютерного программного продукта, осуществленного в любом материальном носителе, в представлении, имеющем компьютерно-применимый программный код, осуществленный на носителе.
[0013] Может использоваться любая комбинация одного или более компьютерно-используемых или компьютерно-читаемых носителей. Например, компьютерно-читаемый носитель может включать в себя одно или более из портативной компьютерной дискеты, жесткого диска, оперативного запоминающего устройства (RAM), постоянного запоминающего устройства (ROM), стираемого программируемого постоянного запоминающего устройства (EPROM или флэш-памяти), портативного постоянного запоминающего устройства на компакт-дисках (CDROM), оптического устройства хранения данных и магнитного устройства хранения данных. В выбранных вариантах осуществления, компьютерно-читаемый носитель может представлять собой любой энергонезависимый носитель, который может содержать, сохранять, передавать, распространять или транспортировать программу для использования посредством либо в связи с системой, аппаратурой или устройством выполнения инструкций.
[0014] Компьютерный программный код для выполнения операций настоящего изобретения может записываться в любую комбинацию одного или более языков программирования, включающих в себя объектно-ориентированный язык программирования, такой как Java, Smalltalk, C++и т.п., и традиционные процедурные языки программирования, такие как язык программирования "C" или аналогичные языки программирования. Программный код может выполняться полностью в компьютерной системе в качестве автономного программного пакета, в автономном аппаратном модуле, частично в удаленном компьютере, расположенном на некотором расстоянии от компьютера, или полностью в удаленном компьютере или сервере. Во втором сценарии, удаленный компьютер может соединяться с компьютером через любой тип сети, включающей в себя локальную вычислительную сеть (LAN) или глобальную вычислительную сеть (WAN), либо соединение может осуществляться к внешнему компьютеру (например, через Интернет с использованием поставщика Интернет-услуг).
[0015] Настоящее изобретение описывается ниже в отношении иллюстраций блок-схем последовательности операций способа и/или блок-схем способов, устройств (систем) и компьютерных программных продуктов согласно вариантам осуществления изобретения. Следует понимать, что каждый блок на иллюстрациях блок-схем последовательности операций способа и/или на блок-схемах и комбинации блоков на иллюстрациях блок-схем последовательности операций способа и/или на блок-схемах могут быть реализованы посредством компьютерных программных инструкций или кода. Эти компьютерные программные инструкции могут быть предоставлены в процессор компьютера общего назначения, компьютера специального назначения или в другое программируемое устройство обработки данных, чтобы формировать машину, так что инструкции, которые выполняются через процессор компьютера или другого программируемого устройства обработки данных, создают средство для реализации функций/действий, указываемых на блок-схеме последовательности операций способа, и/или блока либо блоков на блок-схеме.
[0016] Эти компьютерные программные инструкции также могут быть сохранены на энергонезависимом компьютерно-читаемом носителе таким образом, что они управляют компьютером или другим программируемым устройством обработки данных с возможностью функционировать конкретным способом, так что инструкции, сохраненные на компьютерно-читаемом носителе, формируют изделие, включающее в себя средство инструктирования, которое реализует функцию/действие, указываемую на блок-схеме последовательности операций способа, и/или блок либо блоки на блок-схеме.
[0017] Компьютерные программные инструкции также могут загружаться в компьютер или в другое программируемое устройство обработки данных для того, чтобы инструктировать выполнение последовательности функциональных этапов на компьютере или на другом программируемом устройстве, с тем чтобы формировать компьютерно-реализуемый процесс таким образом, что инструкции, которые выполняются на компьютере или на другом программируемом устройстве, предоставляют процессы для реализации функций/действий, указанных на блок-схеме последовательности операций способа, и/или блока или блоков на блок-схеме.
[0018] Ссылаясь на фиг. 1, контроллер 102 может размещаться в транспортном средстве. Транспортное средство может включать в себя любое транспортное средство, известное в данной области техники. Транспортное средство может иметь все конструкции и признаки любого транспортного средства, известного в данной области техники, включающие в себя колеса, приводную передачу, соединенную с колесами, двигатель, соединенный с приводной передачей, систему рулевого управления, тормозную систему и другие системы, известные в данной области техники как включенные в транспортное средство.
[0019] Как пояснено подробнее в данном документе, контроллер 102 может выполнять автономную навигацию и предотвращение столкновений. В частности, контроллер может координировать движение мотоциклистов между рядами, как подробнее поясняется ниже относительно фиг. 3 и 4.
[0020] Контроллер 102 может соединяться с одним или более осветительных устройств 104 для сигнализирования мотоциклистам. Осветительные устройства могут включать в себя фонари, традиционно включенные в транспортное средство, такие как фонари заднего хода, стоп-сигналы, индикаторные лампы, габаритные фонари или другие фонари, смонтированные на транспортном средстве любым способом, известным в данной области техники. Осветительные устройства 104 предпочтительно могут включать в себя, по меньшей мере, один фонарь на левой стороне и, по меньшей мере, один фонарь на правой стороне транспортного средства.
[0021] Контроллер 102 может соединяться с одним или более сенсорных устройств (считывающих устройств) 106, которые могут включать в себя микрофоны или камеры для обнаружения окружения транспортного средства. Одно или более сенсорных устройств 106 могут включать в себя другие датчики, полезные для обнаружения помех, такие как радар, лидар, сонар, ультразвук и т.п.
[0022] Контроллер 102 может выполнять модуль 108 предотвращения столкновений, который принимает потоки изображений и аудиопотоки и идентифицирует возможные помехи и предпринимает меры, чтобы объезжать их. Модуль 108 предотвращения столкновений может включать в себя модуль 110a связи V2V (между транспортными средствами). V2V-модуль 110a включает в себя модуль 112a связи, выполненный с возможностью обмениваться данными в беспроводном режиме с находящимися в смежной полосе движения транспортными средствами, чтобы обмениваться информацией, к примеру, относительно мотоцикла, который выполняет или собирается выполнять движение между рядами. V2V-модуль 110a дополнительно может включать в себя осветительный модуль 112b, который активирует одно или более осветительных устройств 104 в ответ как (a) на обнаружение того, что мотоциклист выполняет или собирается выполнять движение между рядами, так и (b) на определение того, что транспортное средство не должно осуществлять действие, который создает помехи движению между рядами. Ниже подробнее описывается функция V2V-модуля 110a относительно фиг. 3 и 4.
[0023] Модуль 108 предотвращения столкновений дополнительно может включать в себя модуль 110b идентификации помех, модуль 110c прогнозирования столкновений и решающий модуль 110d. Модуль 110b идентификации помех анализирует один или более потоков изображений и идентифицирует потенциальные помехи, включающие в себя людей, животных, транспортные средства, здания, бордюры и другие объекты и конструкции. В частности, модуль 110b идентификации помех может идентифицировать изображения транспортного средства из выходных сигналов сенсорных устройств 106, таких как потоки изображений из одной или более камер, либо с использованием данных из лидара, радара, ультразвука или другой сенсорной системы.
[0024] Модуль 110c прогнозирования столкновений прогнозирует то, какие изображения помехи с большой вероятностью должны сталкиваться с транспортным средством, на основе его текущей траектории или текущего намеченного пути. Решающий модуль 110d может принимать решение, чтобы останавливаться, ускоряться, поворачивать и т.д. для того, чтобы объезжать помехи. Способ, которым модуль 110c прогнозирования столкновений прогнозирует потенциальные столкновения, и способ, которым решающий модуль 110d предпринимает действие для того, чтобы предотвращать потенциальные столкновения, могут осуществляться согласно любому способу или системе, известным в области техники автономных транспортных средств.
[0025] Решающий модуль 110d может управлять траекторией транспортного средства посредством приведения в действие одного или более актуаторов (исполнительных механизмов) 114, управляющих направлением и скоростью транспортного средства. Например, актуаторы 114 могут включать в себя актуатор 116a рулевого управления, актуатор 116b акселератора и тормозной актуатор 116c. Конфигурация актуаторов 116a-116c может задаваться согласно любой реализации таких актуаторов, известных в области техники автономных транспортных средств.
[0026] Мотоцикл может включать в себя контроллер 118 мотоцикла, включающий в себя модуль 120a обнаружения, который обнаруживает то, когда мотоцикл движется между рядами, к примеру, с использованием одного или более сенсорных устройств 122. Обнаружение движения между рядами может включать в себя реализацию некоторых или всех способов и систем, раскрытых в заявке (США) порядковый номер 14/741,591, поданной 17 июня 2015 года и озаглавленной "DETECTING AND COMMUNICATING LANE SPLITTING MANEUVER", которая настоящим полностью содержится в данном документе по ссылке.
[0027] Сенсорные устройства 122 могут включать в себя обращенную по ходу движения камеру, и модуль 120a обнаружения может обнаруживать движение между рядами посредством обнаружения того, что, разделительная линия находится в пределах пороговой близости к центру поля зрения обращенной по ходу движения камеры. Модуль 120a обнаружения также может обнаруживать движение между рядами посредством определения разделения между транспортными средствами по обе стороны от камеры. Если расстояние ниже некоторого порогового расстояния, например, менее 50% от ширины полосы движения, то модуль 120a обнаружения может определять то, что мотоцикл движется между рядами.
[0028] Контроллер 118 может включать в себя V2V-модуль 120b, выполненный с возможностью обмениваться данными с V2V-модулями 110a других транспортных средств. Как подробнее описано в данном документе, V2V-модуль 120b может уведомлять другие транспортные средства в отношении того, что мотоцикл движется между рядами.
[0029] Контроллер 118 дополнительно может включать в себя модуль 120c выдачи уведомлений, выполненный с возможностью предоставлять уведомления водителю мотоцикла с использованием одного или более устройств 124 выдачи уведомлений. Устройства 124 выдачи уведомлений могут включать в себя устройства тактильной обратной связи, динамики, осветительные приборы, экраны или другие типы устройств вывода. Модуль 120c выдачи уведомлений может выводить уведомления водителю мотоцикла в ответ на такие события, как сообщения, принимаемые из транспортного средства с использованием V2V-модуля 120b. Например, модуль 120c выдачи уведомлений может формировать оповещение в ответ на прием уведомления из другого транспортного средства, указывающего то, что транспортное средство собирается сменять полосу движения.
[0030] Фиг. 2 является блок-схемой, иллюстрирующей примерное вычислительное устройство 200. Вычислительное устройство 200 может использоваться для того, чтобы выполнять различные процедуры, к примеру, процедуры, поясненные в данном документе. Контроллеры 102, 108 могут иметь часть или все атрибуты вычислительного устройства 200.
[0031] Вычислительное устройство 200 включает в себя один или более процессоров 202, одно или более запоминающих устройств 204, один или более интерфейсов 206, одно или более устройств 208 хранения данных большой емкости, одно или более устройств 210 ввода-вывода (I/O) и устройство 230 отображения, все из которых соединяются с шиной 212. Процессоры 202 включают в себя один или более процессоров или контроллеров, которые выполняют инструкции, сохраненные в запоминающих устройствах 204 и/или в устройствах 208 хранения данных большой емкости. Процессоры 202 также могут включать в себя различные типы компьютерно-читаемых носителей, таких как кэш-память.
[0032] Запоминающие устройства 204 включают в себя различные компьютерно-читаемые носители, такие как энергозависимое запоминающее устройство (например, оперативное запоминающее устройство 214 (RAM)) и/или энергонезависимое запоминающее устройство (например, постоянное запоминающее устройство 216 (ROM)). Запоминающие устройства 204 также могут включать в себя перезаписываемое ROM, такое как флэш-память.
[0033] Устройства 208 хранения данных большой емкости включают в себя различные компьютерно-читаемые носители, такие как магнитные ленты, магнитные диски, оптические диски, полупроводниковое запоминающее устройство (например, флэш-память) и т.д. Как показано на фиг. 2, конкретное устройство хранения данных большой емкости представляет собой жесткий диск 224. Различные накопители также могут быть включены в устройства 208 хранения данных большой емкости, чтобы предоставлять считывание из и/или запись в различные компьютерно-читаемые носители. Устройства 208 хранения данных большой емкости включают в себя съемные носители 226 и/или стационарные носители.
[0034] Устройства 210 ввода-вывода включают в себя различные устройства, которые обеспечивают возможность ввода или извлечения данных и/или другой информации в/из вычислительного устройства 200. Примерные устройства 210 ввода-вывода включают в себя устройства управления курсором, клавиатуры, клавишные панели, микрофоны, мониторы или другие устройства отображения, динамики, сетевые интерфейсные платы, модемы, линзы, CCD или другие устройства захвата изображений и т.п.
[0035] Устройство 230 отображения включает в себя любой тип устройства, допускающего отображение информации одному или более пользователям вычислительного устройства 200. Примеры устройства 230 отображения включают в себя монитор, терминал отображения, видеопроекционное устройство и т.п.
[0036] Интерфейсы 206 включают в себя различные интерфейсы, которые обеспечивают возможность вычислительному устройству 200 взаимодействовать с другими системами, устройствами или вычислительными окружениями. Примерные интерфейсы 206 включают в себя любое число различных сетевых интерфейсов 220, таких как интерфейсы с локальными вычислительными сетями (LAN), глобальными вычислительными сетями (WAN), беспроводными сетями и Интернетом. Другие интерфейсы включают в себя пользовательский интерфейс 218 и интерфейс 222 периферийных устройств. Интерфейсы 206 также могут включать в себя один или более периферийных интерфейсов, таких как интерфейсы для указательных устройств (мышей, сенсорных панелей и т.д.), клавиатур и т.п.
[0037] Шина 212 обеспечивает возможность процессорам 202, запоминающим устройствам 204, интерфейсам 206, устройствам 208 хранения данных большой емкости, устройствам 210 ввода-вывода и устройству 230 отображения обмениваться данными между собой, а также с другими устройствами или компонентами, соединенными с шиной 212. Шина 212 представляет одну или более из нескольких типов шинных структур, таких как системная шина, PCI-шина, IEEE1394-шина, USB-шина и т.д.
[0038] В целях иллюстрации, программы и другие исполняемые программные компоненты показаны в данном документе в качестве дискретных блоков, хотя следует понимать, что такие программы и компоненты могут постоянно размещаться в различные моменты времени в различных компонентах хранения данных вычислительного устройства 200 и выполняются посредством процессоров 202. Альтернативно, системы и процедуры, описанные в данном документе, могут реализовываться в аппаратных средствах либо в комбинации аппаратных средств, программного обеспечения и/или микропрограммного обеспечения. Например, одна или более специализированных интегральных схем (ASIC) могут быть запрограммированы с возможностью осуществлять одну или более систем и процедур, описанных в данном документе.
[0039] Обращаясь теперь к фиг. 3, транспортные средства 300a-300f в многополосном трафике могут двигаться в полосах движения по обе стороны от разделительной линии 302 между полосами движения. Мотоциклист 304 может двигаться между полосами движения, например, на/в районе разделительной линии 302. Мотоциклист 304 типично должен двигаться быстрее других транспортных средств 300a-300f и предоставляет мало времени на реакцию. Кроме того, если транспортные средства 300a-300f перемещаются медленно, зазоры между ними могут быть небольшими, и в результате видимость позади каждого транспортного средства может быть ограничена.
[0040] На фиг. 3, каждое транспортное средство включает в себя контроллер 102, размещенный в нем, а также осветительные устройства 104, осуществленные в качестве правых габаритных фонарей 306a-306f и левых габаритных фонарей 308a-308f. Другие позиции и типы осветительных устройств могут использоваться согласно способам, описанным в данном документе. Например, могут использоваться фонари заднего хода, световые сигналы и стоп-сигналы, а не габаритные фонари 306a-306f, 308a-308f. Например, такие осветительные приборы могут активироваться с использованием отличительного шаблона мигания, чтобы четко указывать подтверждение того, что мотоцикл 304 движется между рядами. В некоторых вариантах осуществления, фонари 306a-306f, 308a-308f могут светить на панели транспортного средства, чтобы предоставлять широкую освещенную поверхность.
[0041] В любом случае, фонари нескольких транспортных средств 300a-300f могут активироваться одновременно и/или согласно волнообразному шаблону или шаблону движения, чтобы указывать открытый путь для движущегося между рядами мотоцикла 304. Например, фонари 308a-308c могут мигать последовательно и по порядку, и фонари 306d-306f могут мигать последовательно и по порядку, так что мигающие фонари 306d-306f, 308a-308c четко указывают открытый путь для мотоцикла 304.
[0042] В варианте осуществления по фиг. 3, мотоцикл 304 включает в себя сенсорное устройство 122, осуществленное в качестве обращенной по ходу движения камеры 310. Обращенная по ходу движения камера 310 может центрироваться на продольной (переднезадней) оси мотоцикла 304 таким образом, что путь мотоцикла при движении по прямой центрируется в поле зрения камеры. Соответственно, близость разделительной линии 302 к центру поля зрения камеры 310 может использоваться для того, чтобы определять то, движется или нет мотоцикл 304 между рядами.
[0043] Фиг. 4 иллюстрирует способ 400, который может осуществляться посредством контроллера 118 мотоцикла для мотоцикла 304 и контроллеров 102 одного или более транспортных средств 300a-300f, чтобы содействовать движению мотоцикла 304 между рядами. Например, проиллюстрированный способ 400 может выполняться посредством модуля 108 предотвращения столкновений и его V2V-модуля 110a. Контроллер 118 мотоцикла может выполнять свою часть способа 400 с использованием модуля 120a обнаружения, V2V-модуля 120b и модуля 120c выдачи уведомлений.
[0044] Способ 400 может включать в себя обнаружение 402 посредством контроллера 118 мотоцикла того, движется или нет мотоцикл в данный момент между рядами. Это может включать в себя определение близости разделительной линии 302 к центру поля зрения камеры 310, как подробнее описано ниже относительно фиг. 5 и 6.
[0045] В ответ на обнаружение 402 движения между рядами, контроллер 118 мотоцикла может передавать 404 уведомление в любые транспортные средства поблизости от мотоцикла 304. Например, сигнал может передаваться в транспортные средства в пределах 10 метров, 20 метров, 50 метров или некоторого другого расстояния от мотоцикла 304. Уведомление может передаваться согласно любому беспроводному протоколу, в частности, любому протоколу связи между транспортными средствами (V2V), такому как протокол специализированной ближней связи (DSRC). В некоторых вариантах осуществления, транспортные средства, которые принимают уведомление 404, могут передавать подтверждение приема уведомления по V2V-протоколу. Тем не менее, этот этап может опускаться.
[0046] Контроллер 102 транспортного средства транспортных средств в пределах дальности уведомления относительно этапа 404 затем может принимать 406 уведомление и определять 408 то, содействует или нет транспортное средство движению между рядами. Это может включать в себя представление сообщения водителю посредством экрана, звукового аварийного оповещения или другого сигнала, запрашивающего решение от водителя. Если водитель предоставляет ввод, разрешающий содействие движению между рядами, то этап 410 может выполняться. В противном случае, способ может завершаться. В некоторых вариантах осуществления, определение на этапе 408 может выполняться автоматически. Например, контроллер 102 может определять то, необходима или нет смена полосы движения в течение некоторого порогового периода времени с текущего времени, например, то, требуется или нет смена полосы движения, чтобы достигать места назначения, в которое контроллер 102 транспортного средства осуществляет навигацию.
[0047] Если контроллер 102 транспортного средства определяет 408, что он должен содействовать движению между рядами, то способ 400 может включать в себя подтверждение 410 движения между рядами. Подтверждение движения между рядами может включать в себя активацию осветительных приборов на одной или обеих из правой и левой сторон транспортного средства, таких как габаритные фонари 306a-306f, 308a-308f. Активация габаритных фонарей 306a-306f, 308a-308f может включать в себя активацию их с шаблоном мерцания, который является отличительным и четко передает едущему на мотоцикле 304 то, что транспортное средство содействует движению между рядами. В некоторых вариантах осуществления, мигание осветительных приборов в ряду автомобилей может координироваться или синхронизироваться, чтобы предоставлять шаблон мигания, такой как последовательная активация осветительных приборов в ряду автомобилей, чтобы задавать шаблон движения или волнообразный шаблон. Соответственно, контроллер 102 может обмениваться данными с другими транспортными средствами, смежными с ним, чтобы содействовать такому шаблону. Контроллер 102 дополнительно может перенаправлять уведомление, принимаемое на этапе 406, в другие транспортные средства в пределах дальности сигнала V2V-связи, чтобы достигать транспортных средств за пределами дальности V2V-связи мотоцикла 304. Транспортные средства, которые принимают уведомление этапа 406, отправленное из другого транспортного средства, могут аналогично перенаправлять уведомление.
[0048] В некоторых вариантах осуществления, контроллер 102 транспортного средства, который принимает уведомление относительно движения между рядами и не принимает уведомление в отношении того, что движение между рядами завершено, либо в ином случае не завершает свое содействие движению между рядами, может выполнять различные другие функции, чтобы содействовать движению между рядами. Например, контроллер 102 транспортного средства может опускать смены полосы движения, которые в противном случае должны выполняться в целях ускорения движения, т.е. чтобы объезжать более медленные автомобили, но не требуются для того, чтобы достигать места назначения. Контроллер 102 транспортного средства может сигнализировать смены полосы движения дольше, чем при отсутствии содействия движению между рядами. Контроллер 102 транспортного средства может выполнять смены полосы движения медленнее, чем при отсутствии содействия движению между рядами. Контроллер 102 транспортного средства может приводить в движение транспортное средство еще дальше от разделительной линии, согласно доступному пространству, чтобы предоставлять более широкую область между полосами движения для езды движущегося между рядами мотоцикла.
[0049] В некоторых вариантах осуществления, контроллер 102 транспортного средства может уведомлять мотоцикл 304 в отношении смен полосы движения с использованием беспроводной V2V-связи, в дополнение к использованию световых сигналов. Например, при содействии движению между рядами, контроллер транспортного средства определяет 412 то, что смена полосы движения должна выполняться, будь то в силу необходимости достигать места назначения, объезжать помеху или вследствие включения сигнала поворота водителем. В ответ, контроллер 118 мотоцикла уведомляется 414 в отношении смены полосы движения, к примеру, по протоколу V2V-связи. Уведомление на этапе 414 дополнительно или альтернативно может включать в себя световой сигнал, т.е. изменение света, цвет света или шаблон мигания освещения, используемый для того, чтобы выполнять подтверждение на этапе 410, чтобы подчеркивать то, что транспортное средство собирается выполнять смену полосы движения без включения светового сигнала, предоставленного посредством сигнала поворота транспортного средства.
[0050] В ответ на прием уведомления этапа 414, контроллер 118 мотоцикла может уведомлять 418 едущего на мотоцикле 304 в отношении смены полосы движения. Это может включать в себя вывод визуального сигнала, такого как мигающий фонарь, текстовое сообщение, речевое предупреждение. Уведомление на этапе 418 может предоставляться с использованием устройства тактильной обратной связи на руле мотоцикла 304 или в перчатках едущего на мотоцикле. Также могут использоваться другие механизмы обратной связи. Таким образом, едущий на мотоцикле уведомляется относительно намеченной смены полосы движения посредством транспортного средства независимо от сигнала поворота транспортного средства
[0051] Способ 400 может включать в себя оценку 420 посредством контроллера 118 мотоцикла того, завершено или нет движение между рядами. Это может отличаться от этапа 402, за счет чего поток изображений из обращенной по ходу движения камеры 310 анализируется, чтобы определять то, что состояние, которое указывает движение между рядами, существует дольше. Например, мотоцикл 304 больше не находится в пределах пороговой близости от разделительной линии 302. Завершение движения между рядами также может определяться на основе явного ввода от едущего на мотоцикле, принимаемого посредством обнаружения активации кнопки или элемента пользовательского интерфейса, интерпретируемого посредством контроллера 118 как указывающего это намерение.
[0052] В ответ на определение 420 того, что движение между рядами завершено, уведомление относительно завершения движения между рядами может передаваться 422 в транспортные средства в пределах дальности V2V-связи мотоцикла 304. В ответ на прием такого уведомления, контроллеры 102 транспортного средства могут прекращать выполнение действий, чтобы содействовать движению между рядами, как описано выше, включающих в себя действия этапов 410-414. В некоторых вариантах осуществления, контроллеры 102 транспортного средства могут завершать содействие движению между рядами на основе других критериев. Например, после приема уведомления на этапе 406, обратный отсчет может начинаться, по истечению которого должно завершаться содействие движению между рядами.
[0053] В некоторых вариантах осуществления, вместо передачи 422 уведомления в отношении того, что движение между рядами завершено, контроллер 102 может просто прекращать передачу сигнала на этапе 404. Например, сигнал, отправленный на этапе 404, может отправляться многократно в ходе движения между рядами. Контроллер 102 транспортного средства затем может прекращать содействие движению между рядами после прекращения обнаружения уведомления на этапе 404, т.е. после прохождения предварительно определенного периода времени, большего периода между повторными уведомлениями в то время, когда возникает движение между рядами.
[0054] Снова ссылаясь на фиг. 1, модуль 120a обнаружения может включать в себя модуль 126 обнаружения полосы движения. Модуль 126 обнаружения полосы движения может включать в себя любое электронное устройство, запрограммированное с возможностью выводить граничный сигнал, представляющий местоположение границы полосы движения относительно мотоцикла 304. В некоторых подходах, модуль 126 обнаружения полосы движения может быть расположен, например, около передних фар мотоцикла 304. В некоторых случаях, модуль 126 обнаружения полосы движения может включать в себя камеру, выполненную с возможностью захватывать видеотрансляцию области перед мотоциклом 304. Альтернативно, датчики без камеры, такие как ультразвуковой датчик, навигационный датчик (GPS), инфракрасный датчик и т.д. могут использоваться помимо или в качестве альтернативы камере. Область перед мотоциклом 304 может включать в себя одну или более разметочных линий на поверхности дороги, включающих в себя, например, границы полос движения, такие как разделительные полосы, центральная линия проезжей части, маркировки краев полос движения и т.п. Таким образом, граничный сигнал может включать в себя видеотрансляцию или другое представление области перед мотоциклом 304.
[0055] V2V-модуль 120b может включать в себя любое электронное устройство, сконфигурированное или запрограммированное с возможностью упрощать беспроводную связь между мотоциклом 304 и другими расположенными поблизости транспортными средствами, например, в соответствии с протоколом связи между транспортными средствами. Пример протокола связи между транспортными средствами может включать в себя, например, протокол специализированной ближней связи (DSRC). Соответственно, V2V-модуль 120b может быть запрограммирован с возможностью принимать сообщения или передавать сообщения из/в другие расположенные поблизости транспортные средства. Например, как подробнее поясняется ниже, V2V-модуль 120b может быть запрограммирован с возможностью передавать в широковещательном режиме сигнал движения между рядами, указывающий то, что мотоцикл 304 движется между рядами, в расположенные поблизости транспортные средства.
[0056] Модуль 120a обнаружения может включать в себя любое электронное устройство, запрограммированное с возможностью принимать граничный сигнал и определять из граничного сигнала то, выполняет или нет мотоцикл 304 маневр при движении между рядами. Модуль 120a обнаружения может быть запрограммирован с возможностью обрабатывать граничный сигнал. Обработка граничного сигнала может включать в себя обработку видеотрансляции, захваченной посредством модуля 126 обнаружения полосы движения, чтобы определять то, где находятся разделительные линии 302 относительно мотоцикла 304.
[0057] Обращаясь теперь к фиг. 5, модуль 120a обнаружения может сравнивать местоположение границы полосы движения с центральной осью 502 мотоцикла 304. Центральная ось 502 может представлять собой воображаемую линию, идущую через центр мотоцикла 304. Модуль 120a обнаружения может определять то, что мотоцикл 304 выполняет маневр при движении между рядами, если граница полосы движения совмещается (или находится в пределах предварительно определенного расстояния от) с центральной осью 502. Предварительно определенное расстояние может быть основано на габаритной ширине мотоцикла 304. Например, предварительно определенное расстояние, например, может составлять 50% от ширины мотоцикла 304, 25% от ширины мотоцикла 304, 10% от ширины мотоцикла 304 и т.д. Кроме того, мотоцикл 304 может не двигаться точно параллельно границе полосы движения при движении между рядами. Таким образом, центральная ось 502 и граница полосы движения с большой вероятностью должны пересекаться. Модуль 120a обнаружения может быть запрограммирован с возможностью идентифицировать маневр при движении между рядами, если центральная ось 502 пересекает границу полосы движения в течение предварительно определенного количества времени, например, чтобы отличать движение между рядами от смены полосы движения.
[0058] Ссылаясь на фиг. 6, альтернативно, вместо сравнения местоположения границы полосы движения с центральной осью 502, модуль 120a обнаружения может быть запрограммирован с возможностью определять то, находится или нет граница полосы движения между двумя мнимыми параллельными линиями 602, идущими вдоль длины мотоцикла 304. Расстояние между параллельными линиями 602 может быть основано на ширине мотоцикла 304. Например, расстояние между параллельными линиями 602, например, может составлять 50% от ширины мотоцикла 304, 25% от ширины мотоцикла 304, 10% от ширины мотоцикла 304 и т.д. Модуль 120a обнаружения может быть запрограммирован с возможностью формировать сигнал движения между рядами в ответ, например, на то, что граница полосы движения пересекает одну из параллельных линий 602 и остается между параллельными линиями 602 в течение предварительно определенного количества времени (например, чтобы отличать движение между рядами от простой смены полосы движения).
[0059] Модуль 120a обнаружения может быть запрограммирован с возможностью формировать и выводить сигнал движения между рядами, если модуль 120a обнаружения определяет то, что мотоцикл 304 выполняет маневр при движении между рядами. Сигнал движения между рядами может передаваться в V2V-модуль 120b с инструкцией, чтобы передавать в широковещательном режиме сигнал движения между рядами в расположенные поблизости транспортные средства. Транспортные средства, которые принимают сигнал движения между рядами, могут уведомлять соответствующих водителей в отношении того, что мотоцикл 304 движется между рядами. Расположенные поблизости автономные транспортные средства, в ответ на прием сигнала движения между рядами, могут отъезжать от границы полосы движения, чтобы предоставлять мотоциклу 304 больше пространства для маневра.
[0060] Фиг. 5 и 6 являются примерными изображениями 500, 600, которые могут обрабатываться посредством модуля 120a обнаружения, чтобы определять то, следует или нет передавать в широковещательном режиме сигнал движения между рядами. Изображения 500, 600 могут захватываться посредством, например, камеры 310, соединенной с контроллером 118.
[0061] Ссылаясь на фиг 5, как пояснено выше, центральная ось 502 идет через центр мотоцикла 304. Граница полосы движения находится в пределах предварительно определенного расстояния от центральной оси 502, так что модуль 120a обнаружения может определять то, что мотоцикл 304 движется между рядами. Как результат, модуль 120a обнаружения может формировать сигнал движения между рядами и выводить сигнал движения между рядами в V2V-модуль 120b. V2V-модуль 120b может передавать в широковещательном режиме сигнал движения между рядами в расположенные поблизости транспортные средства. Граница полосы движения не должна идеально выравниваться с центральной осью 502. До тех пор, пока граница полосы движения находится в пределах предварительно определенного расстояния от центральной оси 502, модуль 120a обнаружения может определять то, что мотоцикл 304 движется между рядами. Кроме того, мотоцикл 304 не должен обязательно двигаться точно параллельно границе полосы движения. Таким образом, центральная ось 502 и граница полосы движения с большой вероятностью должны пересекаться. Модуль 120a обнаружения может быть запрограммирован с возможностью идентифицировать маневр при движении между рядами, если центральная ось 502 пересекает границу полосы движения в течение предварительно определенного количества времени таким образом, что смены полосы движения могут отличаться от движения между рядами.
[0062] Ссылаясь теперь на фиг. 6, центральная ось 502 заменена посредством параллельных линий 602. Когда граница полосы движения находится между параллельными линиями 602, модуль 120a обнаружения может формировать сигнал движения между рядами и выводить сигнал движения между рядами в V2V-модуль 120b, который, как пояснено выше, может передавать в широковещательном режиме сигнал движения между рядами в расположенные поблизости транспортные средства. В силу этого модуль 120a обнаружения может быть запрограммирован с возможностью формировать сигнал движения между рядами в ответ, например, на то, что граница полосы движения пересекает одну из параллельных линий 602 и остается между параллельными линиями 602 в течение предварительно определенного количества времени (например, чтобы отличать движение между рядами от простой смены полосы движения).
[0063] Фиг. 7 является блок-схемой последовательности операций способа примерного процесса 700, который может осуществляться посредством контроллера 118 мотоцикла, чтобы уведомлять расположенные поблизости транспортные средства в отношении того, что выполняется маневр при движении между рядами. Процесс 700 может выполняться, когда мотоцикл 304 включается, и может продолжать выполняться до тех пор, пока мотоцикл 304 не будет припаркован или в ином смысле более не едет.
[0064] На этапе 702, модуль 120a обнаружения может захватывать изображение области перед мотоциклом 304. Изображение может захватываться посредством модуля 126 обнаружения полосы движения с использованием изображений из обращенной по ходу движения камеры 310. Модуль 126 обнаружения полосы движения может формировать граничный сигнал, представляющий местоположение границы полосы движения относительно мотоцикла 304, и граничный сигнал может передаваться в модуль 120a обнаружения.
[0065] На этапе 704, модуль 120a обнаружения может обрабатывать граничный сигнал. Модуль 120a обнаружения может принимать граничный сигнал из модуля 126 обнаружения полосы движения, и обработка граничного сигнала может включать в себя извлечение местоположения границы полосы движения из граничного сигнала и сравнение местоположения границы полосы движения с центральной осью 502 (см. фиг. 5) мотоцикла 304 или двумя параллельными линиями 602 (см. фиг. 6), идущими вдоль длины мотоцикла 304. Посредством сравнения местоположения границы полосы движения с центральной осью 502 или параллельными линиями 602, модуль 120a обнаружения может определять то, движется или нет мотоцикл 304 между рядами.
[0066] На этапе 706 принятия решения, система 105 уведомлений в отношении движения между рядами может определять то, движется или нет мотоцикл 304 между рядами. Например, модуль 120a обнаружения может определять то, движется или нет мотоцикл 304 между рядами, например, на основе того, совмещается граница полосы движения (или находится в пределах предварительно определенного расстояния от нее) с центральной осью 502 либо нет, или на основе того, находится или нет граница полосы движения между параллельными линиями 602. Альтернативно или помимо этого, модуль 120a обнаружения может определять то, что мотоцикл 304 движется между рядами, если граница полосы движения пересекает центральную линию в течение предварительно определенного количества времени. Если модуль 120a обнаружения определяет то, что мотоцикл 304 движется между рядами, процесс 700 может переходить к этапу 708. В противном случае, процесс 700 может возвращаться к этапу 702.
[0067] На этапе 708, контроллер 118 мотоцикла может формировать и передавать сигнал движения между рядами. Модуль 120a обнаружения может формировать сигнал движения между рядами, указывающий то, что мотоцикл 304 выполняет маневр при движении между рядами, и передавать сигнал движения между рядами в V2V-модуль 120b с инструкцией, чтобы передавать в широковещательном режиме сигнал движения между рядами в расположенные поблизости транспортные средства. V2V-модуль 120b может передавать сигнал движения между рядами в соответствии с протоколом связи между транспортными средствами, таким как протокол специализированной ближней связи (DSRC). Процесс 700 может переходить к этапу 702 после того, как сигнал движения между рядами передан в широковещательном режиме. Соответственно, сигнал движения между рядами может передаваться 708 многократно до тех пор, пока определяется то, мотоцикл 304 движется между рядами.
[0068] Настоящее изобретение может быть осуществлено в других характерных формах без отступления от своей сущности или неотъемлемых характеристик. Описанные варианты осуществления должны рассматриваться во всех отношениях только как иллюстративные, а не ограничивающие. Например, ссылки на мотоцикл по всему документу могут применяться к любому транспортному средству, которое допускает выполнение движения между рядами, такому как трехколесное транспортное средство, велосипед или другой тип транспортного средства, имеющий такой размер, что он умещается между транспортными средствами, занимающими смежные полосы движения. Следовательно, объем изобретения указан посредством прилагаемой формулы изобретения, а не посредством вышеприведенного описания. Все изменения, которые подпадают под смысл и рамки равнозначности формулы изобретения, должны охватываться ее объемом.
Реферат
Изобретение относится к выполнению объезда помех в автономных транспортных средствах. Контроллер для автономного транспортного средства содержит обрабатывающие устройства. Обрабатывающие устройства запрограммированы с возможностью принимать уведомление из первого транспортного средства и передавать подтверждение приема уведомления в первое транспортное средство. Причем уведомление указывает то, что первое транспортное средство движется между рядами. В ответ на уведомление перемещение автономного транспортного средства ограничивается в область между полосами движения, смежную с полосой движения, в которой движется автономное транспортное средство. Причем обрабатывающие устройства дополнительно запрограммированы с возможностью координировать мигание фонарей с одним или более другими транспортными средствами, чтобы задавать зону движения между рядами вдоль области между полосами движения. Повышается безопасность при эксплуатации ТС. 2 н. и 16 з.п. ф-лы, 7 ил.
Комментарии