Способ и система для формирования механических импульсов - RU2738737C2
Код документа: RU2738737C2
Чертежи
Описание
Область техники
Настоящее изобретение относится к области способов и систем для формирования механических импульсов.
Уровень техники
Сердечно-сосудистые заболевания остаются основной причиной смертности во всем мире. Атеросклероз заключается в накоплении бляшек на внутренней стенке артерий. Хроническая тотальная окклюзия (ХТО) представляет собой полное перекрытие кровеносного сосуда. Такие окклюзии трудно реканализировать с использованием традиционных методов и аппаратов чрескожной транслюминальной ангиопластики (ЧТА). Успех процедуры определяется как возможность пропускания стандартного устройства для ЧТА через ХТО. Недостатки и осложнения процедур ЧТА обычно более выражены при ХТО. Причиной потенциальных осложнений может быть наличие кальцификации и фиброзных тканей в области патологических изменений при ХТО с учетом размеров и извилистости сосуда. Поэтому в значительной мере ХТО лечат с использованием инвазивного шунтирования. Вместе с тем, применение процедур ЧТА при ХТО дает определенные преимущества. Кроме того, некоторые эксперты полагают, что новые устройства и методы в области ЧТА могут увеличить процент успеха и сократить длительность процедуры при лечении ХТО.
На протяжении нескольких лет были разработаны и предложены различные аппараты и методы, чтобы добиться реканализации ХТО с помощью минимально инвазивной процедуры. Например, в устройствах применяли механический ударный элемент с использованием передающего элемента или без него, узкополосный ультразвуковой излучатель с передающим электродом и различные другие методы энергетического воздействия вблизи области патологического изменения при ХТО.
При процедурах, выполняемых с использованием механического ударного элемента, снаряд ускоряется и наносит удар по проксимальному концу передающего элемента или дистальному колпачку, находящемуся в непосредственном контакте с окклюзией. Снаряд может быть ускорен с использованием пневматического источника, соленоида, механической пружины или других средств. Масса снаряда и его скорость при ударе создает высокие нагрузки на ударной поверхности и, следовательно, требует соответствующего обращения с ним. Кроме того, данный способ обеспечивает весьма ограниченную регулировку параметров формируемого механического импульса. Кроме того, такие устройства могут быть шумными.
Другим примером существующего уровня техники служит система, содержащая ультразвуковой электрод, возбуждаемый в резонансе с рупором, и пакетный преобразователь. Система представляет собой первый пример, связанный с использованием узкополосного излучателя. Такую компоновку используют для увеличения смещения на дистальном конце устройства, находящемся в контакте с окклюзией. Ультразвуковой электрод обычно используют внутри специального катетера с циркуляцией охлаждающей текучей среды. Это делает устройство более громоздким и, следовательно, ограничивает его способность достигать ХТО в мелких и извилистых анатомических элементах. При работе устройства также могут возникать значительные потери (из-за искажения и нелинейности сигнала) и/или волновое преобразование (из осевого в поперечное) в месте изгиба. Частота работы (обычно приблизительно 20 кГц) может создавать большие механические напряжения, деформацию и тепловое преобразование в месте соединения ультразвукового электрода с рупором и в самом ультразвуковом электроде. Это может вызывать ослабление ультразвукового электрода, что приводит к повышенному риску отказа.
Второй пример узкополосного излучателя связан с использованием множества резонансных элементов, распределенных в виде фазированной решетки, для формирования и передачи энергии ультразвука по линии передачи. Например, все резонансные элементы передают энергию ультразвука перпендикулярно оси волновода (т.е. формируют радиальные волны). В результате большая часть энергии может теряться в проксимальном концевом элементе, что делает устройство неэффективным. В другом примере резонансные элементы поперечной волны используют для возбуждения продольно распространяющихся волн внутри волноводного электрода (т.е. осевых волн). Стыковое соединение между этими резонансными элементами поперечной волны и волноводом может вызывать проблемы, поскольку связующая среда (например, эпоксидная смола) может быстро разрушаться и/или вносить значительное затухание вследствие поглощения энергии связующим материалом. Следовательно, такие устройства могут быть ограничены в отношении мощности и запаса прочности.
Вблизи области патологического изменения при ХТО могут быть использованы другие формы энергетического воздействия из уровня техники. Например, для создания механических волн вблизи окклюзии может быть использован электромеханический преобразователь (или несколько преобразователей) на дистальном конце катетера или вблизи него. Такой способ может быть ограничен в отношении генерируемой мощности, учитывая миниатюрные размеры такого преобразователя. Кроме того, изготовление такого преобразователя может быть сложным и дорогостоящим, особенно учитывая, что для предотвращения загрязнения такое устройство должно быть утилизировано после использования. Кроме того, для приведения в действие преобразователя (преобразователей) необходимы электрические провода, из которых может происходить утечка тока внутри организма и его влияние на нормальный сердечный ритм.
Для эффективной доставки импульсов света высокой интенсивности к патологической области окклюзии может быть использована энергия лазера с оптическими волокнами. Тем не менее, свойственная оптическим волокнам хрупкость делает их подверженными разрушению, особенно при использовании в извилистых анатомических элементах. Кроме того, эта форма энергии может быть трудно регулируемой и, следовательно, небезопасной для близлежащих здоровых тканей, а также требует дорогостоящих лазерных источников.
Радиочастотная (РЧ) энергия является еще одним источником энергии из уровня техники, которая может быть доставлена к месту окклюзии с использованием электродов и высокого напряжения (т.е. 1 кВ или выше). Тем не менее, радиочастотная энергия может быть ограничена с точки зрения возможностей регулирования и может иметь тенденцию к созданию большого теплового воздействия, приводящего к повреждению близлежащих здоровых тканей. Для создания ударных волн вблизи окклюзии также может быть использован электрический искровой разряд, что требует еще более высоких напряжений (т.е. свыше 2 кВ). Для некоторых конструкций эрозия и механический износ электродов могут создавать проблемы, связанные с безопасностью и надежностью. Кроме того, в целях обеспечения безопасности устройства, использующие электрические разряды в сердце, необходимо синхронизировать с сердечным ритмом пациента, который, следовательно, должен быть предсказуемым и постоянным.
Для ускорения дистальной твердой массы, вызывающего воздействие на ближайшую окклюзию, также могут быть использованы химические детонации. Химические реакции могут быть трудно контролируемыми и управляемыми, особенно в условиях in vivo. С детонациями и взрывами также могут быть связаны токсичные и потенциально опасные продукты.
Таким образом, оказывается, что ударные элементы, узкополосные источники энергии и все другие способы энергетического воздействия предшествующего уровня техники вблизи сосудистых окклюзий обладают недостатками.
Следовательно, существует потребность в улучшенном способе и системе для формирования механических волн для лечения, в частности, окклюзий.
Раскрытие изобретения
В соответствии с первым широким аспектом предложен способ формирования механической волны, включающий в себя: формирование по меньшей мере одного механического импульса большой амплитуды; введение по меньшей мере одного механического импульса в проксимальный конец передающего элемента; распространение по меньшей мере одного механического импульса в передающем элементе от его проксимального конца до его дистального конца; и передачу по меньшей мере одного механического импульса на дистальном конце передающего элемента.
В одном варианте осуществления шаг формирования включает в себя формирование множества механических волн, имеющих первую амплитуду, и объединение этих механических волн с получением по меньшей мере одного механического импульса большой амплитуды, каждый из которых имеет вторую амплитуду, большую, чем первая амплитуда.
В одном варианте осуществления шаг объединения включает в себя фокусирование механических волн в зоне фокусировки.
В одном варианте осуществления шаг фокусирования включает в себя отражение механических волн от параболической поверхности.
В другом варианте осуществления шаг объединения включает в себя распространение механических волн во временном концентраторе.
В следующем варианте осуществления шаг объединения включает в себя распространение механических волн в конусе.
В следующем варианте осуществления шаг объединения включает в себя распространение механических волн в реверберационной полости.
В еще одном варианте осуществления шаг объединения включает в себя распространение механических волн в дисперсионной среде.
В одном варианте осуществления каждый из, по меньшей мере, одного импульса большой амплитуды имеет центральную частоту fc от приблизительно 20 кГц до приблизительно 10 МГц и длительность приблизительно 1/fc.
В одном варианте осуществления амплитуда, по меньшей мере, одного механического импульса большой амплитуды при достижении дистального конца передающего элемента составляет от приблизительно 10 МПа до приблизительно 1000 МПа.
В соответствии со вторым широким аспектом предложена система для формирования механической волны, содержащая: генератор импульсов для формирования, по меньшей мере, одного механического импульса большой амплитуды и малой длительности и передающий элемент, расположенный между проксимальным концом и дистальным концом, при этом проксимальный конец соединен с генератором импульсов для приема от него, по меньшей мере, одного механического импульса, передающий элемент служит для распространения, по меньшей мере, одного механического импульса от проксимального конца до дистального конца и для передачи, по меньшей мере, одного механического импульса на дальнем конце.
В одном варианте осуществления генератор импульсов содержит: множество широкополосных источников, каждый из которых служит для излучения соответствующей механической волны, имеющей первую амплитуду, и волновой концентратор для объединения механических волн с целью получения механического импульса, имеющего вторую амплитуду, большую, чем первая амплитуда.
В одном варианте осуществления волновой концентратор представляет собой пространственный концентратор.
В другом варианте осуществления волновой концентратор представляет собой временной концентратор.
В одном варианте осуществления волновой концентратор выполнен с возможностью фокусирования механических волн в зоне фокусировки, смежной с проксимальным концом передающего элемента.
В одном варианте осуществления волновой концентратор содержит параболическую отражающую поверхность для отражения, по меньшей мере, некоторых из механических волн, сформированных широкополосными источниками, в направлении зоны фокусировки.
В другом варианте осуществления волновой концентратор представляет собой конус.
В еще одном варианте осуществления волновой концентратор содержит ступень пространственной концентрации и ступень временной концентрации.
В одном варианте осуществления каждый из, по меньшей мере, одного механического импульса большой амплитуды имеет центральную частоту fc от приблизительно 20 кГц до приблизительно 10 МГц и длительность приблизительно 1/fc.
В одном варианте осуществления амплитуда, по меньшей мере, одного механического импульса большой амплитуды при достижении дистального конца передающего элемента составляет от приблизительно 10 МПа до приблизительно 1000 МПа.
В соответствии с третьим широким аспектом предложен концентратор для фокусировки механических волн, излучаемых источниками механических волн, содержащий: тело, расположенное между передающей поверхностью, содержащей фокальную зону, и отражающей поверхностью, противоположной передающей поверхности, при этом передающая поверхность служит для размещения, по меньшей мере, одного источника механической волны, и для передачи, по меньшей мере, одной механической волны, излучаемой, по меньшей мере, одним источником механической волны, внутри тела, причем отражающая поверхность не параллельна передающей поверхности для отражения, по меньшей мере, одной механической волны, излучаемой, по меньшей мере, одним источником механической волны, в направлении фокальной зоны передающей поверхности с целью фокусирования, по меньшей мере, одной механической волны и распространения, по меньшей мере, одной сфокусированной механической волны в передающем элементе, расположенном в фокальной зоне, причем фокусировка, по меньшей мере, одной механической волны обеспечивает механическую волну большей амплитуды, имеющую амплитуду, превышающую амплитуду, по меньшей мере, одной механической волны, излучаемой, по меньшей мере, одним источником механической волны.
В одном варианте осуществления фокальная зона расположена по существу в центре передающей поверхности.
В одном варианте осуществления отражающая поверхность содержит, по меньшей мере, один наклонный участок, каждый из которых обращен к соответствующему источнику из, по меньшей мере, одного источника механической волны при его размещении на передающей поверхности, причем каждый из них ориентирован для отражения, по меньшей мере, одной механической волны, излучаемой, по меньшей мере, одним источником механической волны, в направлении фокальной зоны.
В одном варианте осуществления отражающая поверхность имеет, по существу, параболическую форму, обеспечивающую возможность отражения, по меньшей мере, одной механической волны, излучаемой, по меньшей мере, одним источником механической волны, в направлении фокальной зоны.
В одном варианте осуществления отражающая поверхность имеет форму усеченной параболы и содержит участок размещения источника для размещения дополнительного механического источника для излучения дополнительной механической волны, объединяемой в фокальной зоне с, по меньшей мере, одной механической волной, излучаемой, по меньшей мере, одним источником механической волны.
В одном варианте осуществления участок размещения источника по существу обращен к фокальной зоне передающей поверхности.
В одном варианте осуществления участок размещения источника является по существу плоским.
В одном варианте осуществления передающая поверхность является по существу плоской.
В одном варианте осуществления концентратор дополнительно содержит, по меньшей мере, один выступ, расположенный на передающей поверхности и образующий, по меньшей мере, одно углубление, каждое из которых предназначено для размещения в нем соответствующего одного из, по меньшей мере, одного источника механической волны.
В одном варианте осуществления передающая поверхность содержит, по меньшей мере, один закругленный участок для размещения соответствующего одного из, по меньшей мере, одного источника механической волны, имеющего закругленный излучающий конец.
В одном варианте осуществления участок передающей поверхности, содержащий фокальную зону, является по существу плоским для введения механической волны большей амплитуды в волновод, имеющий, по существу, плоский конец.
В одном варианте осуществления участок передающей поверхности, содержащий фокальную зону, является закругленным для введения механической волны большей амплитуды в волновод, имеющий закругленный конец.
В одном варианте осуществления передающая поверхность выполнена с возможностью размещения на ней, по меньшей мере, двух концентрических источников механических волн.
В одном варианте осуществления, по меньшей мере, один источник механической волны содержит, по меньшей мере, одно из следующего: кольцевой источник механической волны и шестиугольный кольцевой источник механической волны.
В соответствии с четвертым широким аспектом предусмотрено соединительное устройство для соединения друг с другом двух механических волноводов, содержащее: гнездовой соединитель, имеющий первое отверстие для размещения в нем первого механического волновода, при этом первый механический волновод содержит первый фланец, смежный с его первым концом, а внутренняя поверхность гнездового соединителя содержит выступ; штыревой соединитель, имеющий второе отверстие для размещения в нем второго механического волновода, при этом второй механический волновод содержит второй фланец, смежный с его вторым концом, при этом штыревой соединитель содержит соединительный конец, выполненный с возможностью его введения в первое отверстие гнездового соединителя; первую втулку, выполненную с возможностью ее введения вокруг первого механического волновода и содержащую первую опорную поверхность для упора в первый фланец первого механического волновода и вторую опорную поверхность для упора в выступ, расположенный на внутренней поверхности гнездового соединителя, и вторую втулку, выполненную с возможностью ее введения вокруг второго механического волновода и содержащую третью опорную поверхность для упора во второй фланец второго механического волновода и четвертую опорную поверхность для упора в соединительный конец штыревого соединителя.
В одном варианте осуществления соединительный конец штыревого соединителя имеет скошенное углубление, а четвертая опорная поверхность второй втулки скошена для обеспечения упора в скошенном углублении штыревого соединителя.
В одном варианте осуществления выступ гнездового соединителя скошен и вторая опорная поверхность первой втулки скошена для обеспечения упора в скошенный выступ.
В одном варианте осуществления штыревой соединитель содержит трубчатый участок, смежный с соединительным концом, а первое отверстие гнездового соединителя содержит цилиндрический участок, причем трубчатый участок штыревого соединителя выполнен с возможностью его введения в цилиндрический участок первого отверстия гнездового соединителя.
В одном варианте осуществления трубчатый участок штыревого соединителя содержит первую резьбу, расположенную на его наружной поверхности, а внутренняя поверхность гнездового соединителя содержит вторую резьбу, расположенную на цилиндрическом участке первого отверстия, при этом вторая резьба соответствует первой резьбе, так что штыревой и гнездовой соединители выполнены с возможностью резьбового соединения друг с другом.
В одном варианте осуществления первая и вторая втулки выполнены из первого пластикового материала, отличающегося от второго материала, а штыревой и гнездовой соединители выполнены из второго материала.
В одном варианте осуществления первая и вторая втулки выполнены из пластика.
В одном варианте осуществления первая втулка выполнена с возможностью упора в первый фланец, расположенный по всей окружности первого механического волновода, а вторая втулка выполнена с возможностью упора во второй фланец, расположенный по всей окружности второго механического волновода.
В одном варианте осуществления первый или второй механический волновод содержит сужающийся участок.
В соответствии с другим широким аспектом предусмотрено соединительное устройство для соединения друг с другом двух механических волноводов, содержащее: штыревой соединитель, имеющий первое отверстие для размещения в нем первого механического волновода, содержащего первый фланец, смежный с его первым концом, при этом первое отверстие содержит первый участок для размещения первого фланца первого механического волновода и второй участок, внутренняя поверхность штыревого соединителя содержит первый выступ, образующий второй участок первого отверстия, первый выступ содержит первую опорную поверхность для упора в первый фланец первого механического волновода, и размеры второго участка первого отверстия больше, чем размеры первого механического волновода, так что, когда первый механический волновод введен в штыревой соединитель, первый выступ не находится в физическом контакте с первым механическим волноводом; и гнездовой соединитель, имеющий второе отверстие для размещения в нем второго механического волновода, содержащего второй фланец, смежный с его вторым концом, при этом второе отверстие содержит третий участок для размещения в нем второго фланца второго механического волновода и части штыревого соединителя и четвертый участок, внутренняя поверхность гнездового соединителя содержит второй выступ, образующий четвертый участок второго отверстия, второй выступ содержит вторую опорную поверхность для упора во второй фланец второго механического волновода, и размеры четвертого участка второго отверстия больше, чем размеры второго механического волновода, так что, когда второй механический волновод введен в гнездовой соединитель, второй выступ не находится в физическом контакте со вторым механическим волноводом.
В одном варианте осуществления первое и второе отверстия являются цилиндрическими, второй участок первого отверстия имеет диаметр, больший, чем диаметр первого механического волновода, и меньший, чем диаметр первого фланца, а четвертый участок второго отверстия имеет диаметр, больший, чем диаметр второго механического волновода, и меньший, чем диаметр второго фланца.
В одном варианте осуществления часть штыревого соединителя, вводимая в гнездовой соединитель, содержит первую резьбу, расположенную на его наружной поверхности, а внутренняя поверхность гнездового соединителя содержит вторую резьбу на третьем участке второго отверстия, при этом вторая резьба соответствует первой резьбе, так что штыревой и гнездовой соединители выполнены с возможностью резьбового соединения друг с другом.
В одном варианте осуществления первый выступ выполнен с возможностью упора в первый фланец, расположенный по всей окружности первого механического волновода, а второй выступ выполнен с возможностью упора во второй фланец, расположенный по всей окружности второго механического волновода.
В одном варианте осуществления первый или второй механический волновод содержит сужающийся участок.
В соответствии с еще одним широким аспектом предусмотрено соединительное устройство для соединения друг с другом двух механических волноводов, содержащее: штыревой соединитель, имеющий первое отверстие для размещения в нем первого механического волновода, при этом внутренняя поверхность штыревого соединителя содержит множество зубцов, выступающих из нее; и гнездовой соединитель, имеющий второе отверстие для размещения в нем второго механического волновода, содержащего фланец, смежный с его концом, при этом внутренняя поверхность гнездового соединителя содержит выступ для упора во фланец второго механического волновода, а второе отверстие обеспечивает возможность размещения в нем, по меньшей мере, части штыревого соединителя.
В одном варианте осуществления штыревой соединитель содержит трубчатое тело, расположенное вдоль продольной оси и имеющий отверстие, расположенное вдоль продольной оси, для обеспечения возможности введения в него первого механического волновода.
В одном варианте осуществления штыревой соединитель содержит первую резьбу, расположенную на части штыревого соединителя, вставляемой в гнездовой соединитель, а внутренняя поверхность гнездового соединителя содержит вторую резьбу, при этом вторая резьба соответствует первой резьбе, так что штыревой и гнездовой соединители выполнены с возможностью резьбового соединения друг с другом.
В одном варианте осуществления штыревой соединитель содержит два полутрубчатых тела, при этом каждый из зубцов выступает из внутренней поверхности соответствующего одного из двух полутрубчатых тел.
В одном варианте осуществления каждый из двух полутрубчатых тел. содержит первую резьбу на его наружной поверхности, а внутренняя поверхность гнездового соединителя содержит вторую резьбу, при этом вторая резьба соответствует первой резьбе, так что штыревой и гнездовой соединители выполнены с возможностью резьбового соединения друг с другом.
В одном варианте осуществления соединительное устройство дополнительно содержит крепежные средства для крепления двух полутрубчатых тел друг к другу вокруг первого механического волновода.
В одном варианте осуществления зубцы заострены.
В одном варианте осуществления зубцы имеют пирамидальную форму.
В другом варианте осуществления зубцы имеют коническую форму.
В одном варианте осуществления каждый из зубцов выполнен с возможностью его размещения в соответствующем углублении, расположенном на боковой поверхности первого механического волновода.
В соответствии с еще одним широким аспектом предусмотрено соединительное устройство для соединения друг с другом двух механических волноводов, содержащее: штыревой соединитель, имеющий первое отверстие для размещения в нем первого механического волновода, содержащего множество зубцов, выступающих из его боковой поверхности; и гнездовой соединитель, имеющий второе отверстие для размещения в нем второго механического волновода, содержащего фланец, смежный с его концом, при этом внутренняя поверхность гнездового соединителя содержит выступ для упора во фланец второго механического волновода, а второе отверстие обеспечивает возможность размещения в нем, по меньшей мере, части штыревого соединителя.
В одном варианте осуществления штыревой соединитель содержит трубчатое тело, расположенное вдоль продольной оси и имеющий отверстие, расположенное вдоль продольной оси, для обеспечения возможности введения в него первого механического волновода.
В одном варианте осуществления штыревой соединитель содержит первую резьбу, расположенную на части штыревого соединителя, вставляемой в гнездовой соединитель, а внутренняя поверхность гнездового соединителя содержит вторую резьбу, при этом вторая резьба соответствует первой резьбе, так что штыревой и гнездовой соединители выполнены с возможностью резьбового соединения друг с другом.
В одном варианте осуществления внутренняя поверхность трубчатого тела содержит углубления, каждое из которых служит для размещения соответствующего зубца.
В одном варианте осуществления углубления имеют форму, сходящуюся к точке.
В одном варианте осуществления каждое из углублений имеет пирамидальную форму.
В другом варианте осуществления каждое из углублений имеет коническую форму.
В другом варианте осуществления штыревой соединитель содержит два полутрубчатых тела, при этом каждый из зубцов выступает из внутренней поверхности соответствующего одного из двух полутрубчатых тел.
В одном варианте осуществления каждый из двух полутрубчатых тел содержит первую резьбу на его наружной поверхности, а внутренняя поверхность гнездового соединителя содержит вторую резьбу, причем вторая резьба соответствует первой резьбе, так что штыревой и гнездовой соединители выполнены с возможностью резьбового соединения друг с другом.
В одном варианте осуществления соединительное устройство дополнительно содержит крепежные средства для крепления двух полутрубчатых тел друг к другу вокруг первого механического волновода.
В одном варианте осуществления внутренняя поверхность двух полутрубчатых тел содержит углубления, каждое из которых служит для размещения соответствующего одного из зубцов.
В одном варианте осуществления углубления имеют форму, сходящуюся к точке.
В одном варианте осуществления каждое из углублений имеет пирамидальную форму.
В другом варианте осуществления каждое из углублений имеет коническую форму.
В соответствии с еще одним широким аспектом предусмотрен механический волновод, содержащий: удлиненное тело, расположенное вдоль продольной оси между проксимальным концом и дистальным концом, при этом проксимальный конец выполнен с возможностью приема механической волны, удлиненное тело выполнено с возможностью распространения принятой механической волны от проксимального конца до дистального конца, а дистальный конец выполнен с возможностью передачи, по меньшей мере, части распространяемой механической волны в среду, окружающую дистальный конец.
В одном варианте осуществления удлиненное тело имеет цилиндрическую форму.
В одном варианте осуществления удлиненное тело имеет постоянный диаметр вдоль продольной оси.
В одном варианте осуществления удлиненное тело имеет переменный диаметр вдоль продольной оси.
В одном варианте осуществления дистальный конец выполнен с возможностью прохождения фиброзной ткани и/или кальцифицированной ткани, содержащейся в окклюзии.
В одном варианте осуществления дистальный конец выполнен с возможностью выполнения, по меньшей мере, одного из следующих действий: пробивания, прохождения, расщепления, разрушения, проникновения в окклюзию и создания канала в ней.
В одном варианте осуществления дистальный конец выполнен с возможностью создания растягивающей волны в среде, окружающей дистальный конец, и создания эффекта кавитации внутри этой среды.
В одном варианте осуществления, по меньшей мере, часть удлиненного тела выполнена из биологически совместимого материала.
В одном варианте осуществления, по меньшей мере, часть удлиненного тела покрыта биологически совместимым материалом.
В одном варианте осуществления, по меньшей мере, часть удлиненного тела обладает дисперсионными свойствами.
В одном варианте осуществления удлиненное тело не обладает дисперсионными свойствами.
В одном варианте осуществления, по меньшей мере, часть удлиненного тела имеет размеры, обеспечивающие возможность ее введения в кровеносный сосуд организма.
В одном варианте осуществления удлиненное тело выполнено из одного материала.
В одном варианте осуществления удлиненное тело выполнено из нескольких материалов.
В одном варианте осуществления, по меньшей мере, часть удлиненного тела имеет покрытие с акустическим импедансом, отличающимся от акустического импеданса удлиненного тела.
В одном варианте осуществления, по меньшей мере, часть удлиненного тела имеет покрытие с низким коэффициентом трения.
В одном варианте осуществления покрытие с низким коэффициентом трения выполнено из гидрофобного материала.
В одном варианте осуществления покрытие с низким коэффициентом трения выполнено из гидрофильного материала.
В одном варианте осуществления покрытие с низким коэффициентом трения выполнено из политетрафторэтилена.
В одном варианте осуществления, по меньшей мере, часть удлиненного тела имеет поверхность, обработанную с целью уменьшения трения.
В одном варианте осуществления часть удлиненного тела обеспечивает пользователю возможность манипулирования и возможность крепления к захватывающему приспособлению.
В одном варианте осуществления, по меньшей мере, часть удлиненного тела выполнена из гибкого материала или эластичного материала.
В одном варианте осуществления, по меньшей мере, часть удлиненного тела выполнена из материала с низким коэффициентом ослабления.
В одном варианте осуществления материал с низким коэффициентом ослабления содержит одно из следующего: нержавеющую сталь, алюминий, алюминиевый сплав, титан, титановый сплав, нитинол и плавленый кварц.
В одном варианте осуществления титановый сплав содержит Ti-6Al-4V или Ti-11,5Mo-6Zr-4,5Sn (титан бета III).
В одном варианте осуществления, по меньшей мере, часть удлиненного тела подвергнута термической обработке.
В одном варианте осуществления термообработка представляет собой отжиг.
В одном варианте осуществления, по меньшей мере, часть удлиненного тела имеет микроструктуру, обеспечивающую низкий коэффициент ослабления.
В одном варианте осуществления, по меньшей мере, часть удлиненного тела выполнена с возможностью противостоять нагрузке и деформации, создаваемым за счет распространения в нем механического импульса.
В одном варианте осуществления, по меньшей мере, часть удлиненного тела выполнена с возможностью противостоять усталостным явлениям, связанным с повторяющимся прохождением механических импульсов.
В одном варианте осуществления размеры поперечного сечения удлиненного тела меньше центральной длины волны механического импульса, распространяющегося в нем.
В одном варианте осуществления удлиненное тело имеет круглое поперечное сечение, а диаметр удлиненного тела меньше, чем центральная длина волны механического импульса, распространяющегося в нем.
В одном варианте осуществления диаметр цилиндрического удлиненного элемента выбран таким образом, чтобы цилиндрическое удлиненное тело выдерживало толкающее усилие, прикладываемое пользователем.
В одном варианте осуществления, по меньшей мере, часть удлиненного тела выполнена с возможностью ее введения в катетер.
В одном варианте осуществления поперечное сечение, по меньшей мере, части удлиненного тела выбрано таким образом, чтобы свести к минимуму ее контакт с катетером.
В одном варианте осуществления поперечное сечение, по меньшей мере, части удлиненного тела является прямоугольным или квадратным.
В одном варианте осуществления, по меньшей мере, часть удлиненного тела содержит выпуклости, выступающие из его боковой поверхности.
В одном варианте осуществления проксимальный конец является плоским, частично закругленным и закругленным.
В одном варианте осуществления дистальный конец покрыт гидрофобным материалом или гидрофильным материалом.
В одном варианте осуществления механический волновод дополнительно содержит акустический соединитель, прикрепленный к дистальному концу.
В одном варианте осуществления механический волновод дополнительно содержит рентгеноконтрастную метку, закрепленную рядом с дистальным концом.
В одном варианте осуществления рентгеноконтрастная метка содержит одно из следующего: вольфрамовую метку, золотые полоски, покрытие высокой плотности, кольцо высокой плотности, катушку высокой плотности и полимерную оболочку с плотными металлическими порошками в качестве наполнителя.
В одном варианте осуществления дистальный конец является плоским, закругленным, частично закругленным или скошенным.
В одном варианте осуществления дистальный конец имеет такую форму, чтобы направлять механический импульс, по меньшей мере, частично, в радиальном направлении.
В одном варианте осуществления дистальный конец имеет форму усеченного конуса.
В одном варианте осуществления дистальный конец выполнен с возможностью фокусирования механической энергии вне дистального конца.
В одном варианте осуществления часть удлиненного тела, смежная с дистальным концом, является криволинейной, изогнутой или гнущейся.
В одном варианте осуществления диаметр цилиндрического удлиненного тела составляет от приблизительно 0,004 дюйма до приблизительно 0,035 дюйма.
В одном варианте осуществления диаметр дистального конца больше диаметра части удлиненного тела, смежной с дистальным концом.
В одном варианте осуществления удлиненное тело содержит множество отдельных проводников.
В одном варианте осуществления удлиненное тело имеет трубчатую форму.
В одном варианте осуществления соотношение между длиной удлиненного тела и диаметром удлиненного тела превышает 100.
В одном варианте осуществления соотношение между длиной удлиненного тела и диаметром удлиненного тела превышает 1000.
В одном варианте осуществления длина удлиненного тела составляет от приблизительно 36 дюймов до приблизительно 200 дюймов.
В одном варианте осуществления проксимальный конец выполнен с возможностью соединения с источником механических волн или импульсов.
В одном варианте осуществления трубчатое удлиненное тело содержит текучую среду или газ.
В одном варианте осуществления дистальный конец выполнен в форме, обеспечивающей фокусирование механической волны вне его.
В одном варианте осуществления дистальный конец имеет вогнутую форму.
В одном варианте осуществления часть удлиненного тела, смежная с дистальным концом, разделена на разные области вдоль продольной оси.
Для целей настоящего описания выражение «узкая полоса пропускания» следует понимать как указание на относительную ширину полосы частот, меньшую, чем приблизительно 10%, а выражение «широкая полоса пропускания» следует понимать как указание на относительную ширину полосы частот, большую или равную приблизительно 10%. Относительная ширина полосы частот определяется следующим уравнением:
где fc - центральная или пиковая частота (т.е. частота, при которой частотный спектр является максимальным), a Δf - полоса пропускания по уровню - 3 дБ. Выражение «полоса пропускания по уровню - 3 дБ» следует понимать как полосу частот, в которой величина вибрации больше, чем половина величины на центральной или пиковой частоте fc.
Следовательно, широкополосный сигнал следует понимать как сигнал, имеющий полосу пропускания широкополосной частоты. Аналогично, широкополосный источник следует понимать как источник, излучающий сигнал, имеющий полосу пропускания широкополосной частоты.
Границу между узкополосной и широкополосной полосами пропускания также можно определить в терминах коэффициента Q (т.е. добротности). Коэффициент Q определяется как величина, обратная относительной ширине полосы частот, т.е. Q=fc/Δf. Эквивалентный порог добротности между узкой и широкой полосами пропускания равен приблизительно 10. Узкополосный источник соответствует источнику с высоким Q (звон), т.е. источнику, имеющему коэффициент Q, больший, чем приблизительно 10, а широкополосный источник соответствует источнику с низким Q (затухание), т.е. источнику, имеющему коэффициент Q, равный или меньший, чем приблизительно 10.
Для целей настоящего описания механическую волну следует понимать как сигнал, имеющий произвольную амплитуду, длительность, форму волны, частоту и т.п. Например, механическая волна может иметь большую или малую амплитуду, малую или большую длительность, различные формы сигналов и любой частотный спектр.
Для целей настоящего описания механический импульс следует понимать как кратковременную механическую волну. Длительность механического импульса имеет порядок 1/fc.
Кроме того, механический волновод следует понимать как волновод, выполненный с возможностью распространения механических волн или импульсов вдоль его длины. В настоящем описании выражения «волновод», «механический волновод» и «передающий элемент» могут использоваться взаимозаменяемо. Форма и размеры волновода могут быть различными. Например, волновод может иметь цилиндрическую форму. Диаметр волновода может быть постоянным по его длине. В альтернативном варианте диаметр волновода может изменяться по его длине. Например, диаметр волновода может уменьшаться по его длине, так что волновод имеет коническую форму.
Краткое описание чертежей
Дополнительные характеристики и преимущества настоящего изобретения ясны из следующего подробного описания, рассматриваемого в сочетании с приложенными чертежами.
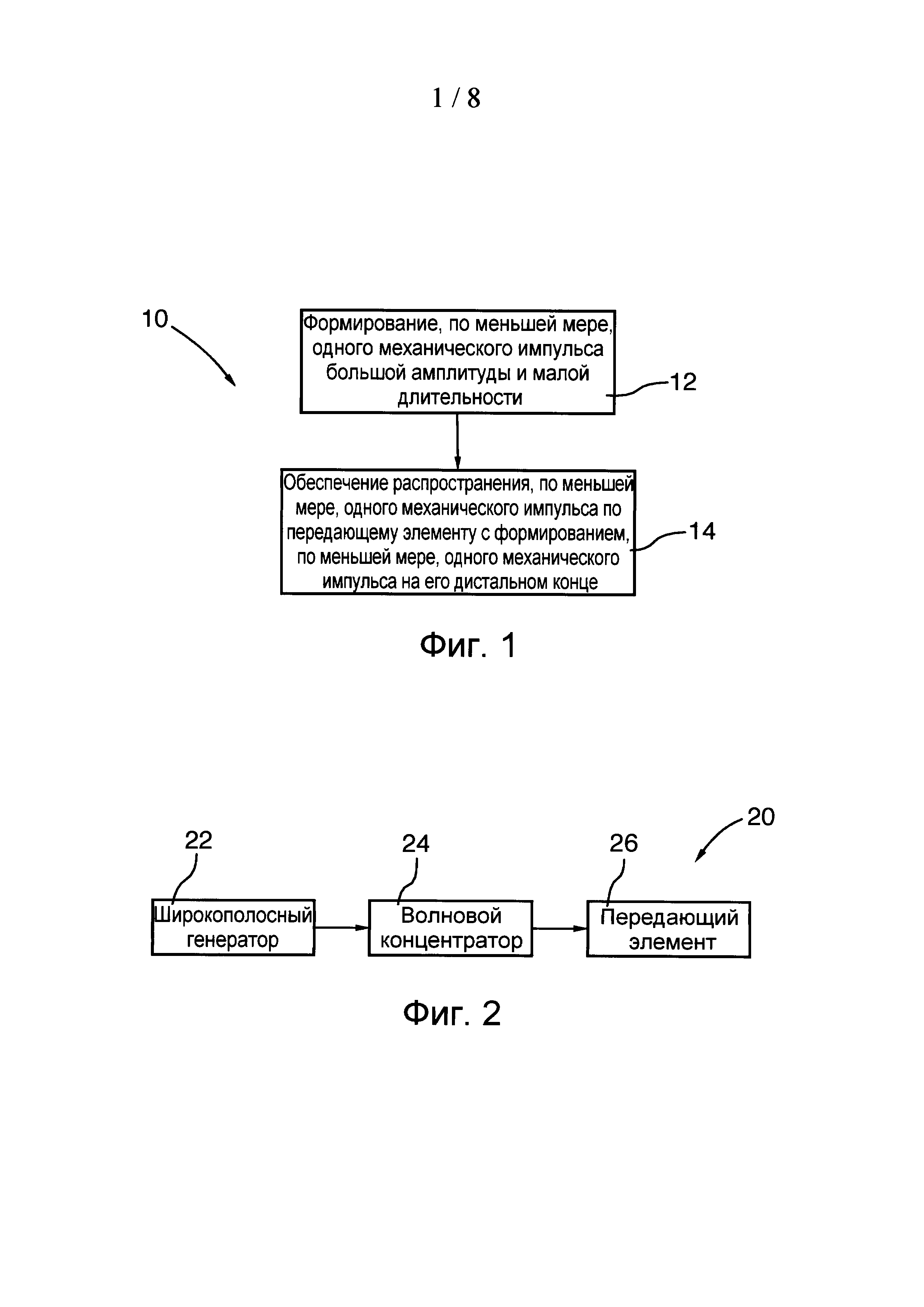
Фиг. 1 представляет собой диаграмму последовательности шагов способа формирования механического импульса в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 2 представляет собой структурную схему системы для формирования механического импульса в соответствии с вариантом осуществления настоящего изобретения.
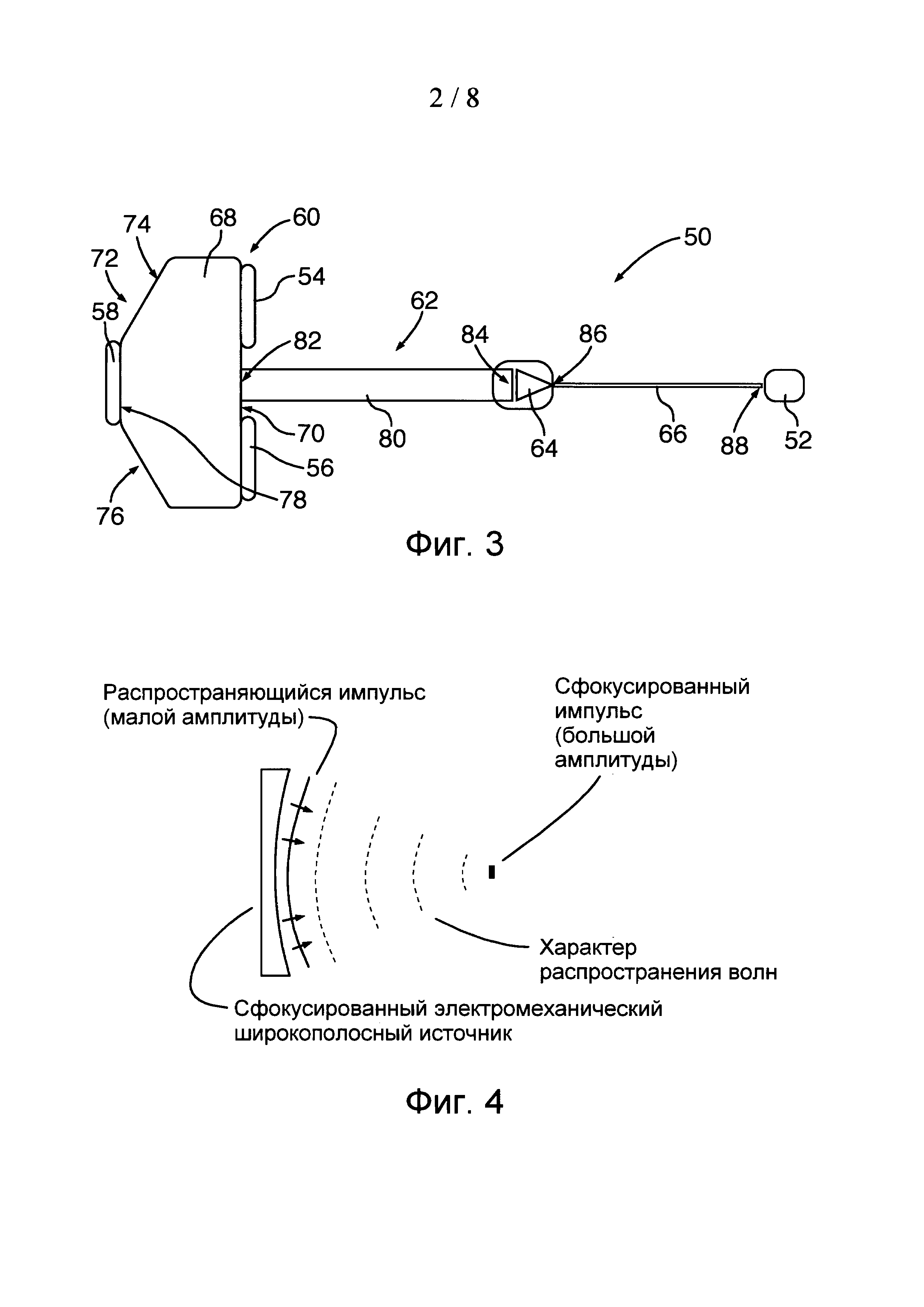
Фиг. 3 иллюстрирует систему для формирования механических импульсов, содержащую отражающий концентратор, временной концентратор, конический концентратор и передающий элемент, в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 4 иллюстрирует сфокусированный электромеханический широкополосный источник в соответствии с вариантом осуществления настоящего изобретения.
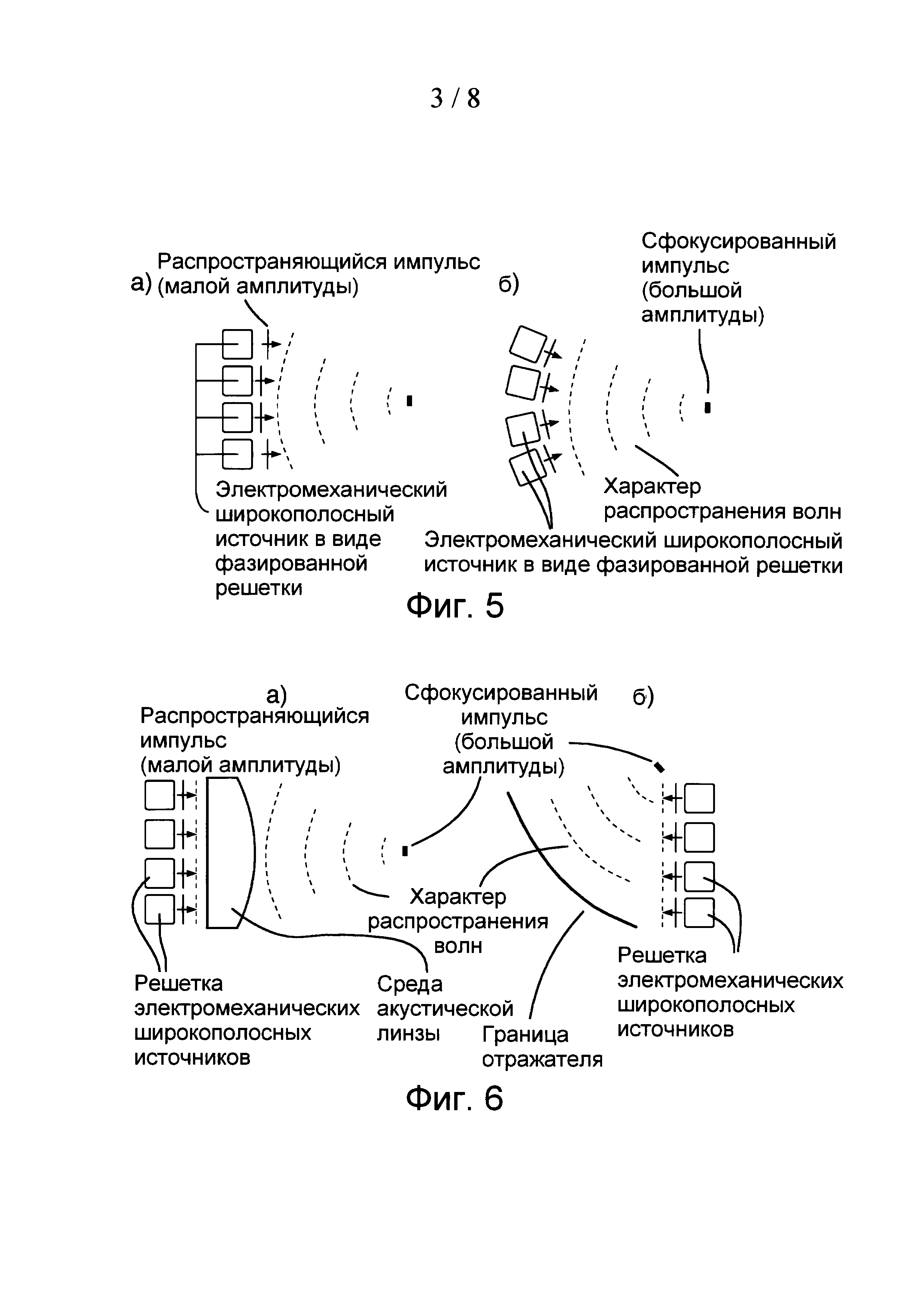
Фиг. 5 иллюстрирует электромеханический широкополосный источник в виде фазированной решетки в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 6(a) иллюстрирует антенную решетку, состоящую из электромеханических широкополосных источников, действующих совместно с акустической линзой, в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 6(б) иллюстрирует антенную решетку, состоящую из электромеханических широкополосных источников, действующих совместно с отражателем, в соответствии с вариантом осуществления настоящего изобретения.
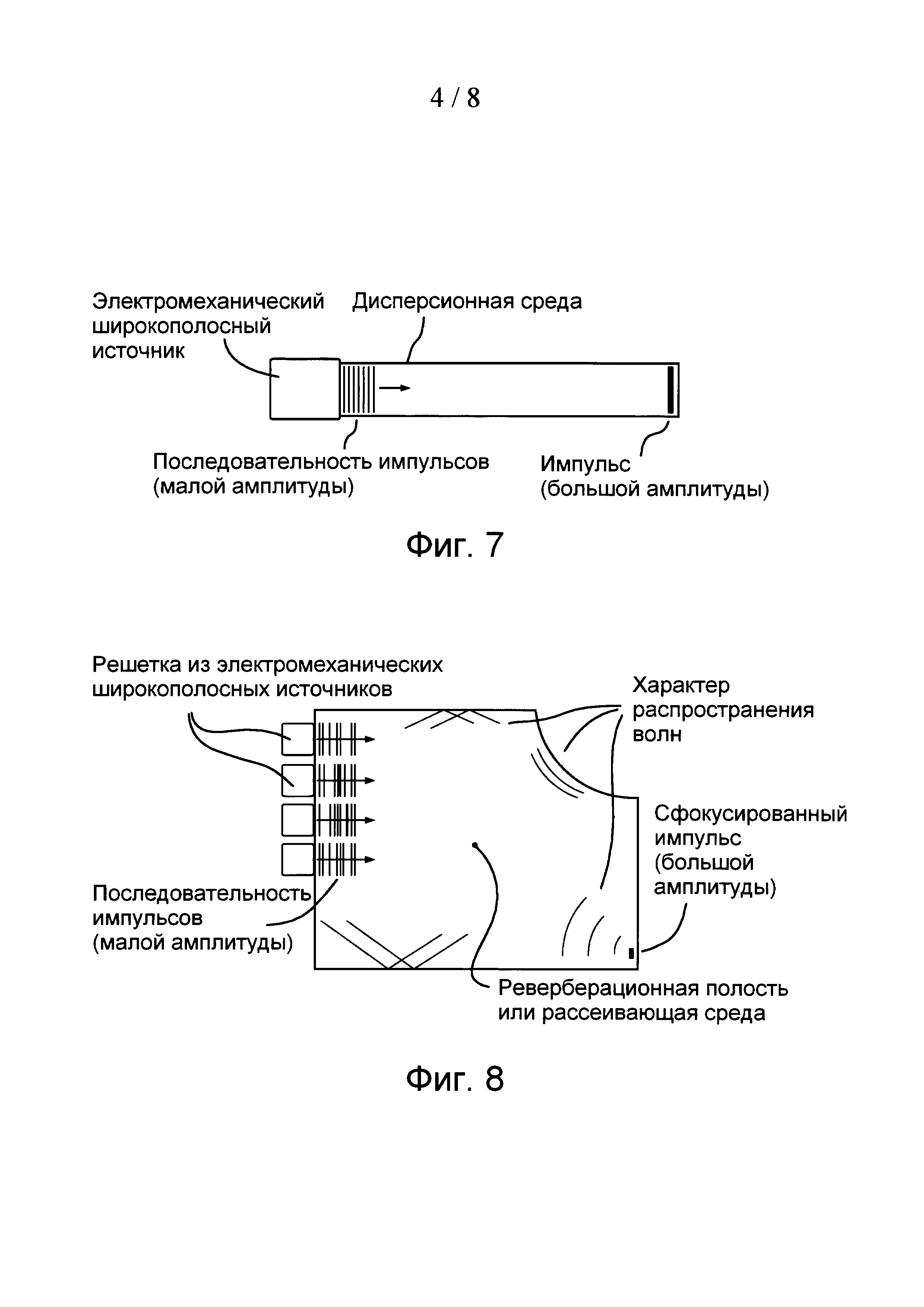
Фиг. 7 иллюстрирует электромеханический широкополосный источник, действующий совместно с дисперсионной средой, в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 8 иллюстрирует антенную решетку, состоящую из электромеханических широкополосных источников, действующих совместно с многократно рассеивающей или реверберационной средой, в соответствии с вариантом осуществления настоящего изобретения.
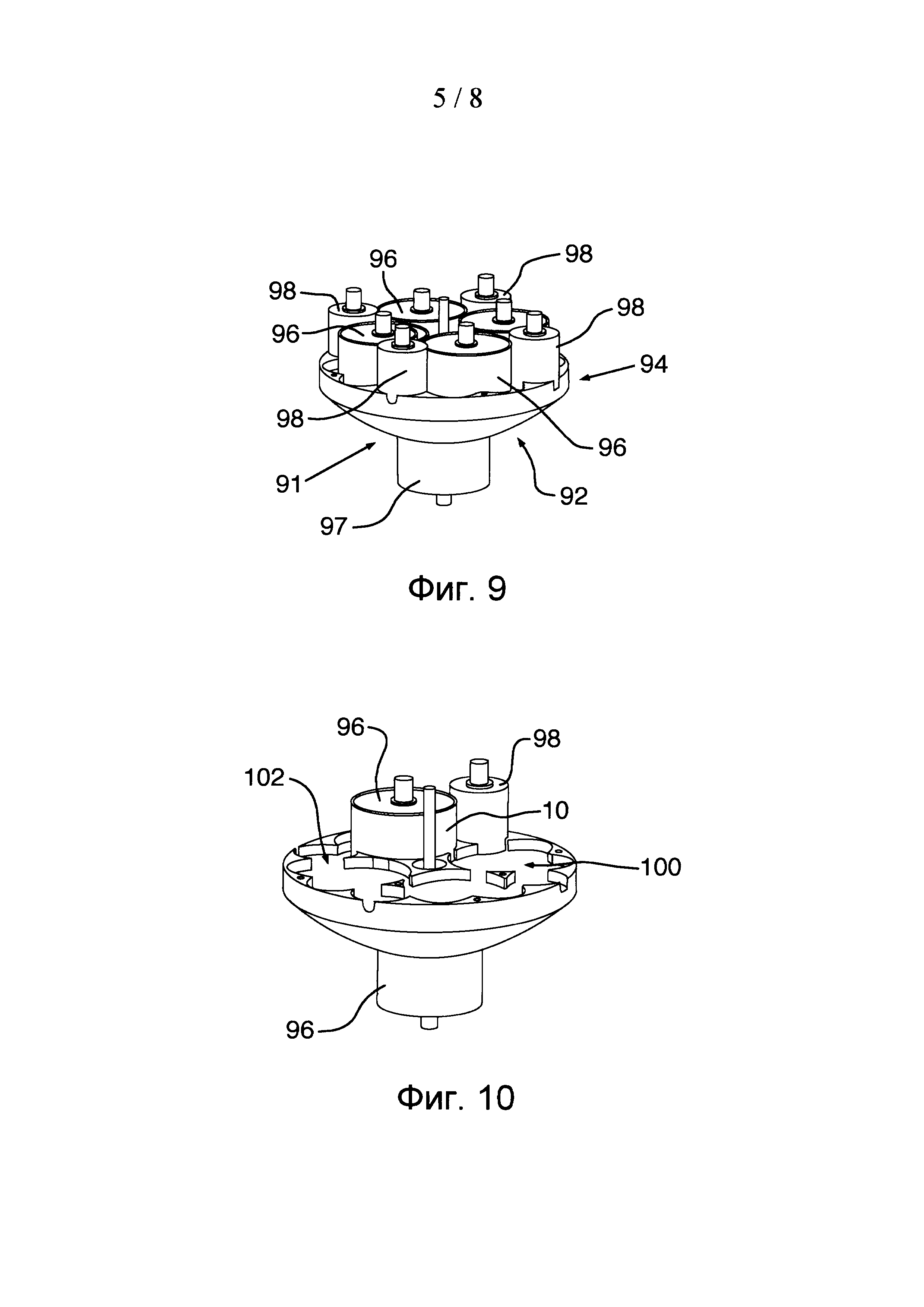
Фиг. 9 представляет вид в перспективе пространственного концентратора, выполненного с возможностью объединения механических волн, излучаемых девятью электромеханическими преобразователями, в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 10 представляет собой аксонометрический вид пространственного концентратора по Фиг. 9, из которого удалены шесть электромеханических преобразователей.
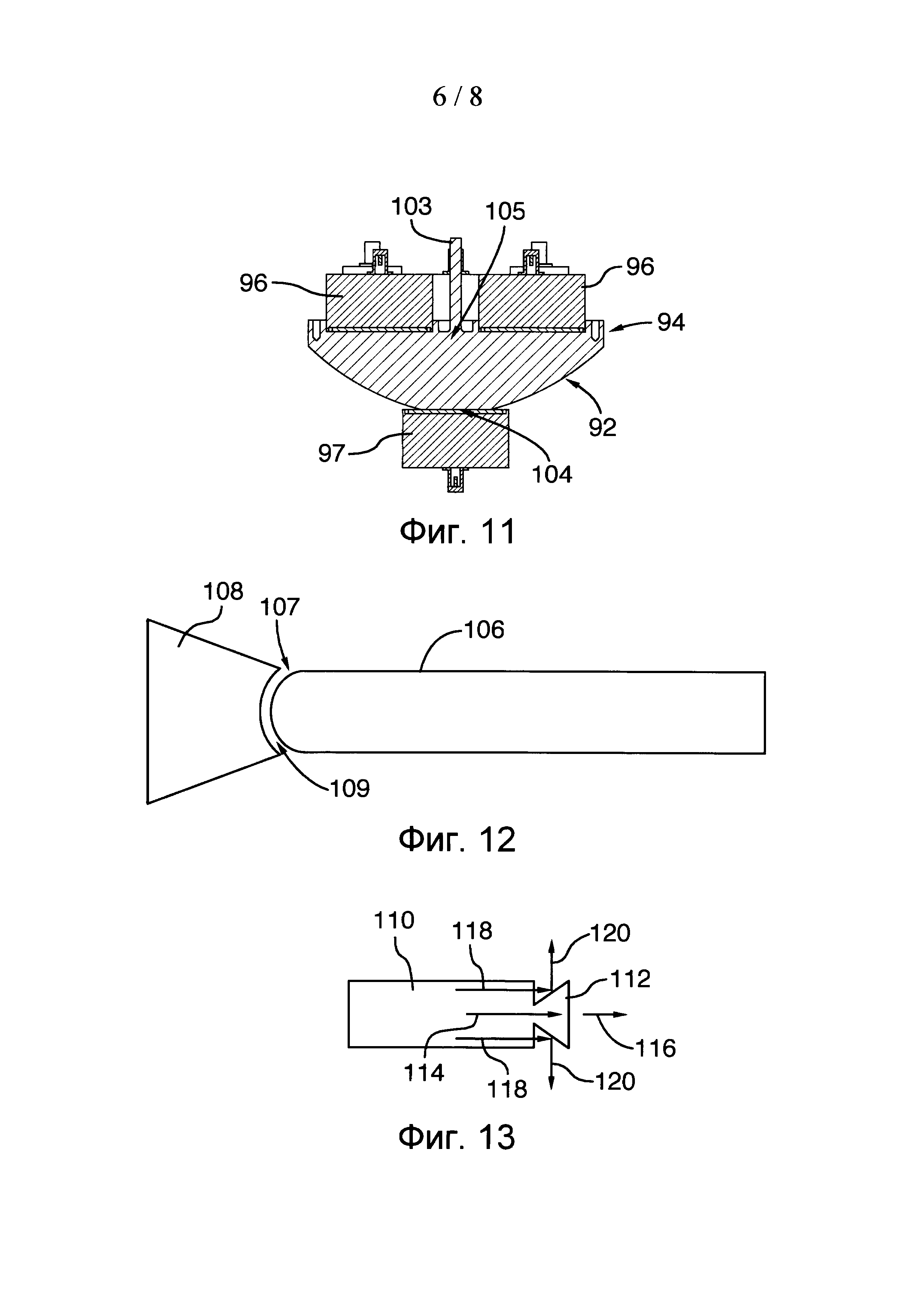
Фиг. 11 представляет собой поперечный разрез концентратора по Фиг. 9.
Фиг. 12 иллюстрирует соединение между передающим элементом со скругленным концом и конусом в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 13 иллюстрирует пример передающего элемента, снабженного отражающим волны выступом на дистальном конце, в соответствии с вариантом осуществления настоящего изобретения.
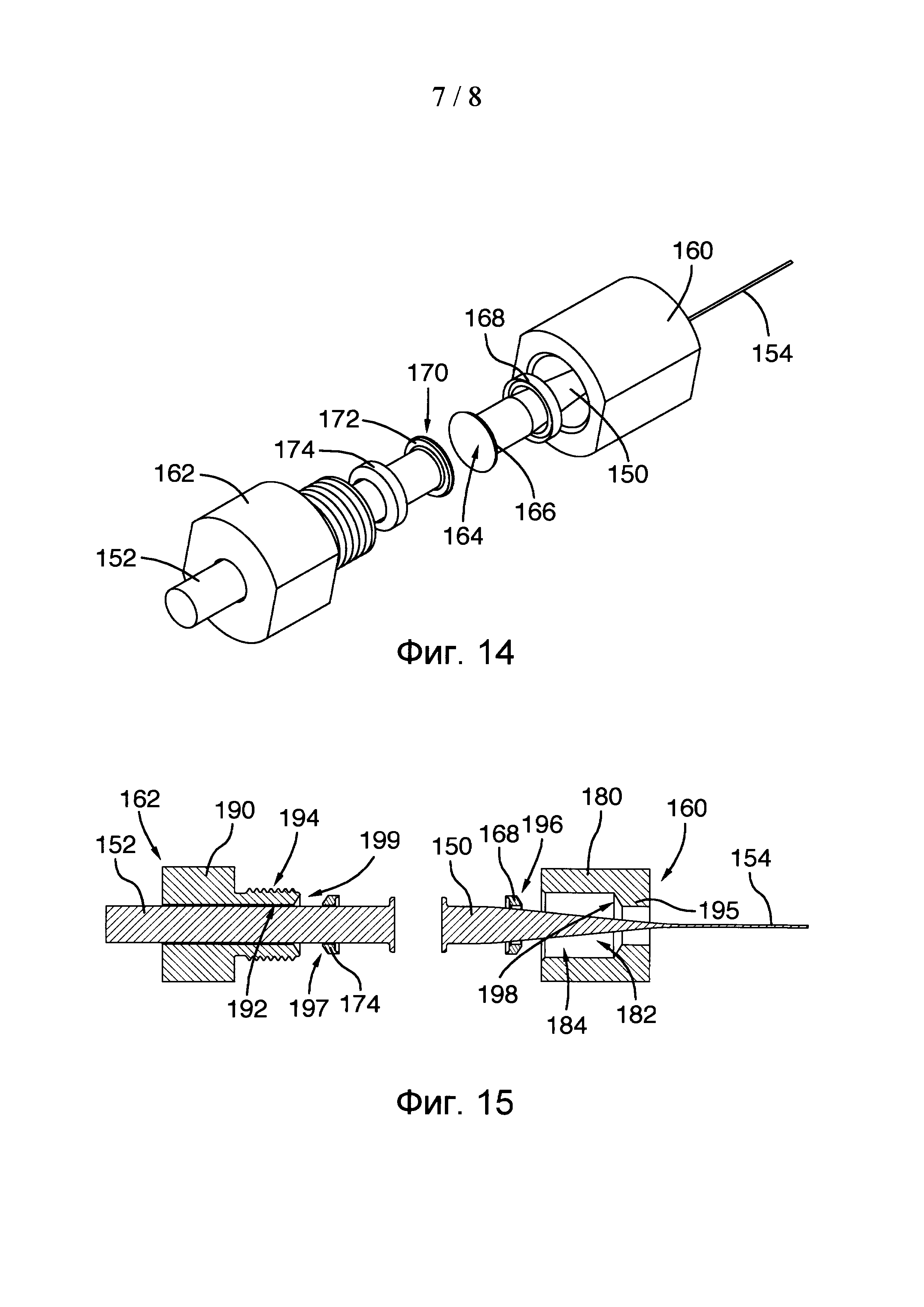
Фиг. 14 представляет собой аксонометрический вид соединительной системы для разъемного соединения конуса и дисперсионного волновода, при этом соединительная система находится в открытом положении, в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 15 представляет собой поперечный разрез соединительной системы по Фиг. 14 в открытом положении.
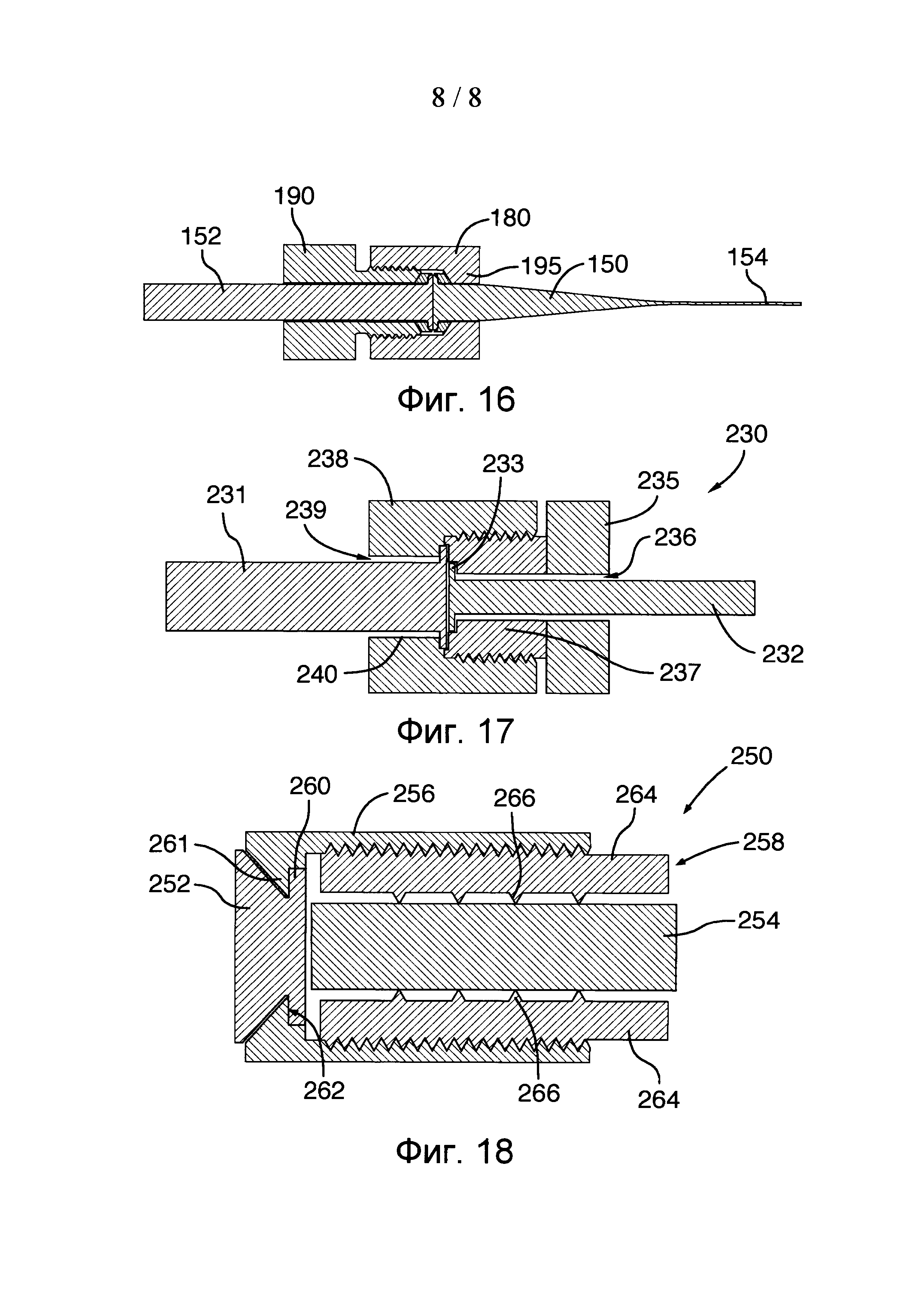
Фиг. 16 представляет собой боковой разрез соединительной системы по Фиг. 14 в закрытом положении.
Фиг. 17 иллюстрирует соединительную систему для разъемного соединения передающего элемента и дисперсионного волновода в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 18 иллюстрирует соединительную систему для разъемного соединения передающего элемента и конуса в соответствии с вариантом осуществления настоящего изобретения.
Следует отметить, что на приложенных чертежах одинаковые элементы обозначены одинаковыми ссылочными номерами.
Осуществление изобретения
Фиг. 1 иллюстрирует вариант осуществления способа 10 формирования и распространения механических импульсов. В одном варианте осуществления способ может быть предназначен для лечения сосудистых окклюзий, то есть для прохождения окклюзии, имеющейся в кровеносном сосуде, таком как вена или артерия, или в любой другой полости, имеющейся в организме человека. Способ 10 может находить применение и в других областях, помимо медицины. Например, способ может быть использован для прохождения окклюзий или препятствий в трубе, используемой для распространения воды или любой другой текучей среды.
На шаге 12 формируется, по меньшей мере, один механический импульс. Каждый механический импульс имеет большую амплитуду и малую длительность.
В одном варианте осуществления для формирования механического импульса объединяют друг с другом выходные сигналы нескольких источников, охватывающие соседние полосы частот. В одном варианте осуществления объединяют друг с другом выходные сигналы, по меньшей мере, двух широкополосных источников, т.е. механические импульсы, формируемые, по меньшей мере, двумя широкополосными источниками. В другом варианте осуществления объединяют друг с другом выходные сигналы, по меньшей мере, одного широкополосного источника и, по меньшей мере, одного узкополосного источника.
В другом варианте осуществления механические импульсы формируют путем фокусирования посредством пространственного концентратора выходного сигнала мощного широкополосного источника в направлении фокальной зоны. Следует понимать, что выходные сигналы от более чем одного мощного широкополосного источника могут одновременно фокусироваться в одной и той же фокальной зоне.
В еще одном варианте осуществления механический импульс с большой амплитудой может быть создан за счет пространственного и/или временного объединения механических импульсов или волн, последовательно излучаемых одним широкополосным источником, с использованием реверберационной полости. Следует понимать, что механические импульсы, формируемые более чем одним широкополосным источником, могут быть объединены друг с другом в пространстве и/или во времени посредством реверберационной полости для обеспечения механического импульса большой амплитуды.
В еще одном варианте осуществления механические импульсы с большой амплитудой могут быть созданы с использованием дисперсионной среды для объединения составляющих волн (представленных ниже в контексте временного волнового концентратора 62), излучаемых последовательно одним широкополосным источником. Следует понимать, что механические импульсы, формируемые более чем одним источником, могут быть объединены друг с другом с использованием дисперсионной среды.
На шаге 14 каждый механический импульс распространяется вдоль передающего элемента, например волновода, выполненного с возможностью распространения механических импульсов или волн, т.е. механического волновода. Передающий элемент расположен между проксимальным концом и дистальным концом. Передающий элемент принимает созданный механический импульс на проксимальном конце и далее механический импульс распространяется вдоль передающего элемента до дистального конца. При достижении дистального конца механический импульс передается на дистальном конце, что вызывает смещение дистального конца и создание механического импульса, который распространяется в направлении от дистального конца в среде, окружающей дистальный конец передающего элемента. В одном варианте осуществления механический импульс по существу полностью передается с дистального конца передающего элемента. В другом варианте осуществления только часть механического импульса передается с дистального конца передающего элемента, в зависимости, помимо прочего, от непрерывности акустического импеданса на границе между дистальным концом и окружающей средой.
В одном варианте осуществления механический импульс имеет центральную частоту fc от приблизительно 20 кГц до приблизительно 10 МГц. В одном варианте осуществления амплитуда механического импульса при достижении дистального конца передающего элемента составляет от приблизительно 10 МПа до приблизительно 1000 МПа. В одном варианте осуществления длительность механического импульса при достижении дистального конца передающего элемента имеет порядок 1/fc.
В одном варианте осуществления способ может быть предназначен для лечения сосудистых окклюзий, т.е. прохождения окклюзии, имеющейся в кровеносном сосуде. В этом случае, по меньшей мере, часть передающего элемента расположена внутри кровеносного сосуда так, чтобы его дистальный конец примыкал к окклюзии. Например, дистальный конец передающего элемента может находиться в физическом контакте с окклюзией. При достижении механическим импульсом дистального конца передающего элемента дистальный конец воздействует на окклюзию и передает механический импульс в саму окклюзию. Если дистальный конец передающего элемента не находится в физическом контакте с окклюзией, механический импульс передается в среде, имеющейся между окклюзией и дистальным концом, например в крови, и передаваемый механический импульс может распространяться в направлении к окклюзии. Механический импульс обеспечивает растрескивание, расщепление, пробивание и/или разрушение окклюзии, а также позволяет дистальному концу передающего элемента проходить окклюзию, когда дистальный конец перемещается дальше внутрь сосуда.
В одном варианте осуществления способ дополнительно включает в себя шаг усиления амплитуды механического импульса. В варианте осуществления, где имеется временной концентратор, механическая волна становится механическим импульсом, амплитуда которого больше амплитуды каждой составляющей волны механической волны. В варианте осуществления, где имеется пространственный концентратор, амплитуда механического импульса или волны увеличивается при распространении по пространственному концентратору. В другом варианте осуществления, где имеется пространственный концентратор, различные механические волны или импульсы объединяются друг с другом для формирования механической волны или импульса большой амплитуды, т.е. различные механические волны или импульсы складываются друг с другом.
Фиг. 2 иллюстрирует вариант осуществления системы 20, которая может быть использована для выполнения способа 10. Система содержит широкополосный генератор 22, концентратор 24, функционально связанный с генератором 22 механических импульсов, и передающий элемент 26, функционально связанный с концентратором 24.
Широкополосный генератор 22 содержит, по меньшей мере, один широкополосный источник, выполненный с возможностью создания механических волн. Формируемые механические волны являются широкополосными и каждая из них имеет по существу малую амплитуду. Механические волны распространяются через концентратор 24, в котором их амплитуда увеличивается, и концентратор 24 выдает механические импульсы, имеющие значительно большую амплитуду, чем эти механические волны. Если концентратор 24 представляет собой временной концентратор, то, по меньшей мере, две составляющие волны механических волн взаимодействуют друг с другом при распространении по временному концентратору для создания, по меньшей мере, одного механического импульса на выходе временного концентратора, так что амплитуда такого механического импульса больше амплитуды механических волн, а длительность такого механического импульса меньше длительности механических волн. Механические импульсы затем передаются в передающий элемент 26 на его проксимальном конце и распространяются вдоль передающего элемента 26 до его дистального конца. Передача механических импульсов к дистальному концу передающего элемента 26 создает механические импульсы, смещающие дистальный конец передающего элемента 26, а затем распространяющиеся в среде, окружающей дистальный конец передающего элемента 26, в направлении от дистального конца передающего элемента 26.
В одном варианте осуществления передающий элемент 26 выполнен с возможностью его введения в кровеносный сосуд, катетер и т.п. В этом случае передающий элемент 26 имеет такой размер и форму, чтобы иметь возможность перемещаться в кровеносном сосуде или катетере. В одном варианте осуществления передающий элемент 26 выполнен из гибкого материала, так что он может изгибаться, чтобы следовать кривизне кровеносного сосуда и т.д.
В одном варианте осуществления концентратор 24 содержит, по меньшей мере, две ступени концентрации. Например, первая ступень концентрации может состоять из пространственного волнового концентратора, а вторая ступень концентрации может состоять из временного волнового концентратора. Следует понимать, что может быть использован любой подходящий концентратор, выполненный с возможностью увеличения амплитуды механических импульсов. Следует также понимать, что в отсутствие временного концентратора широкополосные источники выполнены с возможностью создания механических импульсов. Следует также понимать, что при наличии временного концентратора широкополосные источники выполнены с возможностью создания механических волн, которые становятся механическим импульсом после распространения в концентраторе 24. Следует понимать, что порядок ступеней концентрации может быть изменен так, что первая ступень концентрации содержит временной концентратор, а вторая ступень концентрации содержит пространственный концентратор.
В примере, где отсутствует временной концентратор, пространственный волновой концентратор может быть выполнен с возможностью фокусирования механического импульса, излучаемого мощным широкополосным источником на входе передающего элемента 26, который имеет размер поперечного сечения, меньший, чем поверхность излучения мощного широкополосного источника. В другом примере пространственный волновой концентратор может быть выполнен с возможностью объединения и фокусирования механических импульсов, формируемых, по меньшей мере, двумя различными широкополосными источниками. Время излучения механических импульсов, излучаемых широкополосными источниками, выбирают так, чтобы механические импульсы объединялись для создания единого механического импульса, амплитуда которого больше, чем амплитуда механических импульсов, создаваемых широкополосными источниками.
В другом примере пространственный волновой концентратор может содержать сужающийся волновод.
Пример соответствующего временного концентратора механической волны описан в патентной заявке США №2013/0158453. Временной волновой концентратор содержит удлиненный волновод, обладающий дисперсионными свойствами, которые выбраны так, что в нем распространяются составляющие волны механической волны, имеющие определенную амплитуду и определенную длительность, и объединяются друг с другом в конце удлиненного волновода для формирования импульса, имеющего амплитуду, большую определенной амплитуды механической волны, и длительность, меньшую определенной длительности механической волны.
Несмотря на то, что в иллюстрируемом варианте осуществления волноводный концентратор 24 расположен между широкополосным генератором 22 и передающим элементом 26, специалисту в данной области техники ясно, что он может быть расположен на дистальном конце передающего элемента 26. Например, пространственный концентратор, такой как конус, может быть расположен на дистальном конце передающего элемента 26. Конус может быть выполнен как единое целое с передающим элементом 26, т.е. передающий элемент 26 может иметь конический участок на дистальном конце.
Фиг. 3 иллюстрирует один из примеров системы 50 для формирования и распространения механических волн. В данном примере система 50 предназначена для лечения окклюзии 52, которая может иметься в кровеносном сосуде (не показано), а механические импульсы, создаваемые системой 50, обеспечивают возможность растрескивания, эрозии, расщепления, пробивания и/или разрушения окклюзии 52.
Система 50 содержит три широкополосных источника 54-58, первый пространственный волновой концентратор 60, временной волновой концентратор 62, второй пространственный волновой концентратор 64 и передающий элемент, такой как ультразвуковой волновод 66, выполненный с возможностью распространения механических импульсов. Система дополнительно содержит, по меньшей мере, одно устройство управления (не показано) для питания и управления широкополосными источниками 54-58, чтобы управлять характеристиками механических волн, сформированных широкополосными источниками 54-58. В одном варианте осуществления элементы 54 и 56 являются частью одного и того же широкополосного источника, имеющего кольцевую форму.
Первый пространственный волновой концентратор 60 содержит отражатель 68, который расположен между дистальной или передающей поверхностью 70 и проксимальной или отражающей поверхностью 72. В иллюстрируемом варианте осуществления передающая поверхность 70 является по существу плоской, а широкополосные источники 54 и 56 функционально связаны с передающей поверхностью 70. Следует понимать, что передающая поверхность 70 может быть не плоской.
Отражающая поверхность 72 содержит три участка, т.е. участки 74-78. Участки 74 и 76 наклонены, и каждый из них обращен к соответствующему одному из первого и второго широкополосных источников 54 и 56. Угол между первым участком 74 и передающей поверхностью 70 выбран так, что механические волны, излучаемые первым широкополосным источником 54, отражаются в фокальную зону, такую как центр передающей поверхности 70. Следует понимать, что фокальная зона может быть расположена на передающей поверхности 70 в другом месте, помимо центра передающей зоны 70. Аналогично, угол между вторым участком 76 и передающей поверхностью 70 выбран так, что механические волны, излучаемые вторым широкополосным источником 56, отражаются в фокальную зону передающей поверхности 70. Участок 78 является по существу плоским и параллельным передающей поверхности 70. Следует понимать, что участок 78 может быть не плоским. Кроме того, участок 78 обращен к центру передающей поверхности 70. Размер и форма третьего участка 78 выбраны так, чтобы вмещать третий широкополосный источник 58. Например, третий участок 78 может быть закруглен, например, он может быть вогнутым или выпуклым для размещения закругленного источника, например, источника, имеющего, соответственно, выпуклый или вогнутый излучающий конец.
Несмотря на то, что иллюстрируемая передающая поверхность 70 является плоской, следует понимать, что возможны и другие конструкции. Например, передающая поверхность 70 может содержать закругленные участки, такие как вогнутые участки и/или выпуклые участки для размещения закругленных источников. Например, передающая поверхность 70 может содержать закругленные углубления, образующие вогнутые приемные участки для размещения соответствующего источника 54, 56, имеющего выпуклый излучающий конец. В другом примере передающая поверхность 70 может содержать закругленные выступы, образующие выпуклые приемные участки для размещения соответствующего источника 54, 56, имеющего вогнутый излучающий конец.
Аналогично, фокальная зона 82 может быть плоской для размещения волновода 80, имеющего плоский конец 82. В другом варианте осуществления фокальная зона может быть закругленной для введения объединенных механических волн в волновод 80, имеющий закругленный конец 82. Например, передающая поверхность 70 может содержать закругленное углубление в фокальной зоне, образующее вогнутый соединительный участок для размещения волновода 80, имеющего выпуклый конец 82. В другом примере передающая поверхность 70 может содержать закругленное углубление в фокальной зоне, образующее выпуклый соединительный участок для размещения волновода 80, имеющего вогнутый конец 82. Временной волновой концентратор 62 выполнен с возможностью приема и объединения, по меньшей мере, двух составляющих волн механической волны, имеющих некоторую амплитуду в, по меньшей мере, один механический импульс, имеющий большую амплитуду, чем указанная некоторая амплитуда. В одном варианте осуществления временной волновой концентратор 62 содержит дисперсионный волновод 80, такой как ультразвуковой волновод, описанный в патентной заявке США №2013/0158453. Дисперсионный волновод 80 расположен между проксимальным концом 82 и дистальным концом 84. Проксимальный конец 82 расположен рядом с пространственным волновым концентратором 60, так что функционально связан с ним и по существу обращен к центру распространяющей поверхности 70. Свойства дисперсионного волновода 80 выбраны так, что волновод 80 выполнен с возможностью объединения составляющих волн механической волны, излучаемой широкополосными источниками 54-58, в механические импульсы с большей амплитудой, как описано ниже.
Временной волновой концентратор 62, содержащий дисперсионный волновод 80, работает следующим образом. Любая механическая волна может быть разложена на конечную сумму составляющих волн. Каждая из составляющих волн представляет собой функцию во времени и функцию в пространстве. В частности, каждая составляющая волна имеет сопряженную частоту, величину, фазу во времени и соответствующее поле деформации в пространстве. Определенная форма поля деформации соответствует режиму волновода. В настоящем описании предполагается, что составляющая волна имеет сопряженную частоту, сопряженную амплитуду, сопряженную фазу и сопряженный с ними режим волновода. Как следствие, две составляющие волны могут иметь одинаковую частоту и возбуждать разные режимы. Две составляющие волны могут также иметь разные частоты и возбуждать один и тот же режим. В другом примере две составляющие волны могут иметь разные частоты и возбуждать разные режимы. Для механической волны, распространяющейся в волноводе 80, составляющая волна имеет сопряженную скорость распространения. Когда скорость распространения в волноводе 80 зависит от частоты и режима составляющей волны, волновод считается дисперсионным. Таким образом, дисперсионный волновод вызывает относительную разность фаз составляющих волн механической волны, которая преобразует импульс в механическую волну, имеющую меньшую амплитуду и большую длительность.
Когда дисперсионные свойства волновода 80 выбраны соответствующим образом, дисперсия может быть использована для создания на одном конце механической волны, в которой составляющие волны имеют сопряженные фазы, так что после того, как посредством дисперсионного волновода 80 обеспечивается сдвиг фаз, составляющие волны рекомбинируют на другом конце волновода 80 в требуемую механическую волну, такую как механический импульс большей амплитуды.
Как показано на Фиг. 3, второй пространственный волновой концентратор 64 функционально связан с дистальным концом 84 дисперсионного волновода 80. Второй пространственный волновой концентратор 64 выполнен с возможностью увеличения амплитуды механических импульсов, которые распространяются в нем. В одном варианте осуществления второй пространственный волновой концентратор 64 содержит конус, представляющий собой недисперсионный ультразвуковой волновод, площадь поперечного сечения которого уменьшается вдоль его длины. Первый или проксимальный конец конуса 64 функционально связан с дистальным концом 84 временного волнового концентратора 62 таким образом, чтобы принимать от него механические импульсы. Поскольку механический импульс распространяется вдоль конуса 64, его амплитуда увеличивается, и усиленный механический импульс выходит из конуса на его втором конце.
Передающий элемент 66 расположен между первым или проксимальным концом 86, который функционально связан со вторым или дистальным концом второго пространственного волнового концентратора 64, и вторым или дистальным концом 88. Передающий элемент 66 выполнен с возможностью приема механических импульсов на первом конце 86 и распространения механических импульсов до второго конца 88. При достижении дистального конца 88 механический импульс, по меньшей мере, частично передается для создания передаваемого импульса, который распространяется за пределы передающего элемента 66. Следует понимать, что импульс также может отражаться на конце 88 и распространяться обратно в передающем элементе 66 в направлении первого конца 86. Передаваемый механический импульс соответствует механическому импульсу, который распространяется в среде, окружающей второй конец 88 передающего элемента 66, до окклюзии 52. Передаваемый импульс далее распространяется в окклюзию 52, что создает трещины в окклюзии 52 и, в конечном счете, расщепляет или разрушает окклюзию 52 на части. Кроме того, когда импульс распространяется по передающему элементу, на поверхности передающего элемента возникает радиальное и продольное движение, что уменьшает трение между передающим элементом и окружающей средой и облегчает продольное смещение передающего элемента в среду, например, при прохождении фиброзной ткани в окклюзии.
В варианте осуществления, где дистальный конец 88 передающего элемента 66 упирается в окклюзию 52, передающий элемент 66 может быть дополнительно использован для разрушения окклюзии 52 и/или сверления отверстия в окклюзии 52. Передача механического импульса на дистальном конце 88 передающего элемента 66 создает перемещение дистального конца 88 передающего элемента 66. Во время этого перемещения дистальный конец 88 передающего элемента 66 номинально вначале перемещается к окклюзии 52, а затем возвращается обратно в исходное положение. Следует понимать, что движение может быть изменено на противоположное (то есть дистальный конец 88 может сначала перемещаться от окклюзии 52, а затем к окклюзии 52), в зависимости от полярности механического импульса, достигающего дистального конца 88 передающего элемента 66. Следует также понимать, что движение может быть сложной комбинацией движения взад и вперед. Когда множество отдельных механических импульсов последовательно передается на дистальном конце 88 передающего элемента 66, перемещение дистального конца 88 можно рассматривать как движение ударного перфоратора, которое может использоваться для прохождения окклюзии 52.
Когда дистальный конец 88 передающего элемента 66 втягивается (т.е. отходит от окклюзии), в среде, окружающей дистальный конец 88, создается растягивающая волна, которая может создать эффект кавитации. Если среда представляет собой текучую среду, эта текучая среда изменяет фазу и испаряется в виде микроскопических пузырьков (пустотных и/или заполненных паром), поскольку текучая среда не выдерживает растягивающих усилий. Эти пузырьки неустойчивы и могут схлопываться, вызывая мощные ударные волны и скоростные струи. Эрозионная способность индуцированных ударных волн и скоростных струй может способствовать абляции окклюзии 52.
Несмотря на то, что в приведенном выше описании волновод 80 является дисперсионным, а конус 64 и передающий волновод 66 являются недисперсионными, следует понимать, что возможны и другие конструкции. Например, как волновод 80, так и конус 64 могут быть дисперсионными. В данном случае специалисту в данной области техники ясно, что составляющие волны объединяются друг с другом, чтобы обеспечить механический импульс с большой амплитудой на дистальном конце конуса 64, а не на дистальном конце дисперсионного волновода 80. В другом примере все элементы - волновод 80, конус 64 и передающий элемент 64 - являются дисперсионными. В данном случае составляющие волны объединяются друг с другом, чтобы обеспечить механический импульс большой амплитуды на дистальном конце 88 передающего элемента 66. В другом примере и передающий волновод 66, и волновод 80 являются дисперсионными, а конус 64 является недисперсионным.
Следует понимать, что первый участок передающего элемента 66 введен в кровеносный сосуд, который содержит окклюзию 52, а второй участок передающего элемента 66 расположен за пределами кровеносного сосуда. В одном варианте осуществления, по меньшей мере, первый участок передающего элемента 66 выполнен с возможностью введения в кровеносный сосуд. Например, первый участок передающего элемента 66 может содержать биологически совместимое покрытие или может быть выполнен из биологически совместимого материала.
Далее описана работа системы 50. Первый участок передающего элемента 66 вводится в кровеносный сосуд, содержащий окклюзию 52 таким образом, что дистальный конец 88 передающего элемента 66 находится рядом с окклюзией 52. В одном варианте осуществления передающий элемент 66 расположен так, что его дистальный конец 88 по существу упирается в окклюзию 52.
Каждый из широкополосных источников 54-58 выполнен с возможностью излучения, по меньшей мере, двух различных составляющих волн, например, по меньшей мере, одной более медленной составляющей волны и одной более быстрой составляющей волны (относительно дисперсионного волновода). Каждая составляющая волна, излучаемая широкополосным источником 54, распространяется от передающей поверхности 70 в отражателе 68, отражается на участке 74 отражающей поверхности 72 и распространяется обратно в фокальную зону, расположенную в центре распространяющей поверхности 70. Аналогично, каждая составляющая волна, излучаемая широкополосным источником 56, распространяется от передающей поверхности 70 в отражателе 68, отражается на участке 76 отражающей поверхности 72 и распространяется обратно в фокальную зону. Каждая составляющая волна, излучаемая широкополосным источником 58, распространяется через отражатель 68 в центр фокальной зоны. Поскольку проксимальный конец 82 дисперсионного волновода 80 расположен в фокальной зоне, составляющие волны, излучаемые широкополосными источниками 54-58, передаются в дисперсионный волновод 80.
Широкополосные источники 54-58 работают таким образом, что составляющие волны имеют по существу одинаковую форму волны при достижении ими фокальной зоны. Следует понимать, что амплитуда составляющих волн, излучаемых широкополосными источниками 54-58, может быть различной при достижении фокальной зоны. Время излучения для каждого широкополосного источника 54-58 выбрано таким образом, что составляющие волны достигают центра передающей поверхности 70 по существу в одно и то же время и передаются в проксимальный конец 82 дисперсионного волновода 80, по существу, в одно и то же время. В результате отдельные составляющие волны, излучаемые широкополосными источниками 54-58, объединяются друг с другом на проксимальном конце 82 дисперсионного волновода 80 для создания составляющей волны, имеющей большую амплитуду, чем амплитуда отдельных составляющих волн. Различные составляющие волны большей амплитуды, излучаемые широкополосными источниками 54-58, распространяются вдоль дисперсионного волновода 80 и объединяются друг с другом на дистальном конце 84 дисперсионного волновода 80 с образованием первого механического импульса.
Например, каждый из широкополосных источников 54-58 излучает первую составляющую волну, такую как более медленная составляющая волна, в соответствующее время, так что первая составляющая волна объединяется для создания первой составляющей волны большей амплитуды, такой как более медленная составляющая волна большей амплитуды, при достижении проксимального конца 82 дисперсионного волновода 80. После излучения первой составляющей волны каждый из широкополосных источников 54-58 излучает вторую составляющую волну, такую как более быстрая составляющая волна, в соответствующее время, так что вторая составляющая волна объединяется для создания второй составляющей волны большей амплитуды, такой как более быстрая составляющая волна большей амплитуды, при достижении проксимального конца 82 дисперсионного волновода 80.
Усиливающая рекомбинация возникает, когда более медленная составляющая волна большей амплитуды направляется в дисперсионный волновод 80 прежде более быстрой составляющей волны большей амплитуды, с такими временными интервалами, которые компенсируют относительный фазовый сдвиг, вносимый дисперсионным волноводом 80. Более медленные и более быстрые составляющие волны большей амплитуды взаимодействуют друг с другом вплоть до дистального конца 84 дисперсионного волновода 80. Когда взаимодействие является усиливающим (т.е. когда обе составляющие волны имеют положительную величину или обе отрицательную величину), результирующая механическая волна представляет собой механический импульс большей амплитуды.
Как описано выше, механические волны, излучаемые широкополосными преобразователями, синхронизируются так, что они точно объединяются при перемещении по одиночным или множественным ступеням концентрации для создания механического импульса высокой амплитуды на дистальном конце 84 передающего элемента 66. Для создания этих синхронизированных механических волн, соответственно, приводятся в действие широкополосные преобразователи. Необходимые электрические сигналы возбуждения могут быть вычислены, исходя из поведения системы, или они могут быть получены из экспериментальных измерений.
Следует понимать, что для создания механического импульса более двух составляющих волн большей амплитуды могут объединяться друг с другом на дистальном конце 84 дисперсионного волновода 80. Каждая из, по меньшей мере, двух составляющих волн имеет уникальную заданную скорость распространения по дисперсионному волноводу 80. Следует также понимать, что характеристики составляющих волн, излучаемых широкополосными источниками 54-58, и характеристики дисперсионного волновода 80 выбраны в зависимости от необходимых свойств механического импульса, который должен быть сформирован на дистальном конце 84 дисперсионного волновода 80.
В некоторых вариантах осуществления, по меньшей мере, две составляющие волны имеют сопряженную частоту и сопряженный режим распространения волновода. Эти, по меньшей мере, две составляющие волны имеют разные сопряженные частоты. Эти, по меньшей мере, две составляющие волны имеют одинаковый сопряженный режим.
В некоторых вариантах осуществления этот одинаковый сопряженный режим представляет собой единственный режим дисперсионного волновода 80.
В некоторых вариантах осуществления этот единственный режим представляет собой основной продольный режим дисперсионного волновода 80.
В других вариантах осуществления, по меньшей мере, две составляющие волны имеют разные сопряженные режимы. Эти, по меньшей мере, две составляющие волны имеют одинаковую сопряженную частоту.
Как показано на Фиг. 3, первый механический импульс распространяется от второго конца 84 дисперсионного волновода к конусу 64. В иллюстрируемом варианте осуществления конус 64 представляет собой недисперсионный волновод, площадь поверхности поперечного сечения которого уменьшается по его длине. Поскольку конус 64 является недисперсионным, составляющие волны, формирующие первый механический импульс, не отделяются друг от друга и первый механический импульс распространяется вдоль конуса 64. Кроме того, амплитуда механического импульса возрастает при распространении вдоль конуса вследствие уменьшения площади поверхности поперечного сечения конуса 64. В результате конусом 64 излучается второй механический импульс и амплитуда второго механического импульса больше амплитуды первого механического импульса.
Второй механический импульс связан с недисперсионным передающим элементом 66, в котором он распространяется до дистального конца 88, где передаваемый механический импульс передается в окружающую среду. Как описано выше, передаваемый импульс распространяется вплоть до окклюзии 52 и если дистальный конец 88 передающего элемента 66 упирается в окклюзию 52, то движение ударного перфоратора, создаваемое множеством механических импульсов на конце 88, может быть использовано для прохождения окклюзии 52.
В одном варианте осуществления, по меньшей мере, два из числа элементов, образующих систему 50, т.е. отражателя 68, дисперсионного волновода 80, конуса 64 и передающего элемента 66, неразъемно соединены друг с другом. Например, по меньшей мере, два из этих элементов могут быть сварены друг с другом.
В том же или в другом варианте осуществления, по меньшей мере, два из числа элементов, образующих систему 50, разъемно соединены друг с другом с использованием соответствующего соединителя. Например, конус 64 и передающий элемент 66 могут быть составлять единое целое или могут быть сварены друг с другом, а конус 64 может быть разъемно прикреплен к временному концентратору 62. В этом случае узел, образованный пространственным концентратором 64 и передающим волноводом 66, может быть одноразовым, так что этот узел заменяют после процедуры, а широкополосные источники 54-58, пространственный концентратор 60 и временной концентратор 62 используют для выполнения многих процедур. Следует понимать, что возможны и другие конструкции. Например, одноразовым и разъемно прикрепленным к пространственному концентратору 64 может быть только передающий элемент 66.
В одном варианте осуществления элемент и/или материал для согласования импеданса может быть расположен между двумя элементами, чтобы уменьшить потери соединения между этими двумя элементами. Например, один или несколько слоев материала для согласования импеданса могут быть расположены между широкополосными источниками 54-58 и отражателем 68. В еще одном варианте осуществления элемент для согласования импеданса расположен между дистальным концом передающего элемента 66 и окружающей средой.
В одном варианте осуществления отражатель 68, дисперсионный волновод 80, конус 64 и волновод 66 выполнены из одного и того же материала, чтобы уменьшить потери от несоответствий импеданса.
Следует понимать, что, по меньшей мере, один из концентраторов 60, 62 и 64 может быть исключен и/или относительное положение концентратора 60, 62 и 64 может быть изменено. Например, пространственный концентратор 64 может быть исключен. В данном случае передающий элемент 66 может быть неразъемно или разъемно прикреплен к временному концентратору 62. Альтернативно, временной концентратор также может быть исключен, а передающий элемент 66 может быть прикреплен к пространственному концентратору 60. В другом примере пространственный концентратор 64 может быть размещен в конце передающего элемента 66. В еще одном варианте осуществления временной концентратор 62 может быть исключен, а пространственный концентратор 64 может быть прикреплен к пространственному концентратору 60. В данном случае широкополосные источники 54-58 излучают механические импульсы, объединяемые на входе пространственного концентратора 64 в механический импульс большей амплитуды, амплитуда которого еще больше увеличивается при распространении по пространственному концентратору 64 перед распространением вдоль передающего элемента 66.
Несмотря на то, что в системе 50 использованы широкополосные источники 54-58, такие как ультразвуковые преобразователи, связанные с концентратором 60 для формирования механических волн, следует понимать, что возможны и другие конструкции. В частности, может быть использована электромеханическая энергия, например, пьезоэлектрическая энергия, электромагнитная энергия или энергия магнитострикции. Как описано выше, энергия может быть сконцентрирована в пространстве, во времени или и в том, и в другом, для увеличения амплитуды механических волн, сформированных источником (или несколькими источниками) энергии. Конструкции для пространственной концентрации могут содержать один или несколько более крупных плоских или сфокусированных преобразователей. Преобразователь (или несколько преобразователей) могут быть распределенными в конструкции с фазированной антенной решеткой и использоваться с акустической линзой или акустическим отражателем. В конструкции временного концентратора может быть использован один или несколько плоских или сфокусированных преобразователей с дисперсионной средой или дисперсионным волноводом. Для объединения как пространственной, так и временной концентрации также может быть использована реверберационная полость. Для достижения аналогичных результатов также могут быть использованы любые комбинации или схемы описанных выше конструкций. Для достижения необходимого уровня управления каждый преобразователь, образующий широкополосный генератор 22, может иметь одну и ту же полосу частот или может иметь различные полосы частот.
Ниже описаны примеры конструкций волнового концентратора 24.
В одном варианте осуществления для направления механических волн в общую фокальную зону может быть использован сфокусированный преобразователь, содержащий полусферическую вогнутую излучающую поверхность, как показано на Фиг. 4.
В другом варианте осуществления может быть использован преобразователь с фазированной антенной решеткой, состоящий из множества излучающих элементов, которые могут быть управляемыми по отдельности и расположенными различными способами, как проиллюстрировано двумя примерами на Фиг. 5(a) и 5(b). Каждый из элементов может быть задействован с разной фазой и/или задержкой для управления, фокусирования и объединения результирующего механического волнового фронта. Излучающие элементы также могут иметь иную форму. На Фиг. 5(a) излучающие элементы расположены в соответствии с линейной конфигурацией, а на Фиг. 5(б) они расположены в соответствии с криволинейной конфигурацией.
В еще одном варианте осуществления, чтобы извлечь пользу из разницы в скорости волны между двумя средами для перенаправления механических волн, может быть использована акустическая линза, как показано на Фиг. 6(a). Для фокусирования механических волн с использованием акустической линзы граница раздела между двумя средами имеет форму, аналогичную той, которая описана для сфокусированного преобразователя.
В одном варианте осуществления может быть использован акустический отражатель, выполненный с возможностью отражения падающих механических волн в одну и ту же фокальную зону, как показано на Фиг. 6(б).
В другом варианте осуществления может быть использована конструкция временного концентратора, принимающего вид дисперсионной среды, имеющей градиент в скорости акустической волны, получаемый путем создания градиента, по меньшей мере, одного из его механических свойств, как показано на Фиг. 7. При правильной синхронизации излучения составляющих волн, образующих входную механическую волну, возможно создание механического импульса большой амплитуды в нужном месте путем усиливающей интерференции. В одном варианте осуществления дисперсионные свойства дисперсионной среды обусловлены геометрией волновода, а не свойствами среды.
В другом варианте осуществления также может быть использована конструкция, объединяющая пространственный концентратор и временной концентратор. Эта конструкция может иметь форму реверберационной полости, например, в виде многократно рассеивающей среды, как показано на Фиг. 8. В реверберационной полости использованы многочисленные отражения внутри полости для пространственного и временного фокусирования механических волн в направлении необходимого местоположения с использованием одиночного преобразователя или решетки из преобразователей.
На Фиг. 9-11 показан пример пространственного концентратора 91, выполненного с возможностью объединения друг с другом механических волн, излучаемых девятью широкополосными источниками, например, девятью пьезоэлектрическими преобразователями. Следует понимать, что концентратор 91 может быть использован для объединения механических волн, излучаемых источниками, отличными от широкополосных источников, и что количество источников является только иллюстративным. В данном примере пространственный концентратор 91 содержит усеченный параболический участок 92 и цилиндрический участок 94 и выполнен с возможностью размещения пяти пьезоэлектрических преобразователей 96 и 97 первого типа и четырех пьезоэлектрических преобразователей 98 второго (другого) типа. Например, пьезоэлектрические преобразователи 96 и 97 могут быть цилиндрическими преобразователями, имеющими диаметр приблизительно 2 дюйма, в то время как пьезоэлектрические преобразователи 98 могут быть цилиндрическими преобразователями, имеющими диаметр приблизительно один дюйм. Следует понимать, что количество преобразователей может отличаться, но система содержит, по меньшей мере, один преобразователь. Например, система может содержать два или более концентрических кольцевых преобразователей. Следует также понимать, что количество типов преобразователей также может отличаться. Например, все преобразователи могут быть одинаковыми.
Как показано на Фиг. 10, выступы выступают из верхней поверхности цилиндрического участка 94, образуя четыре углубления 100 и четыре углубления 102. Каждое углубление 100 имеет размер и форму, обеспечивающую размещение соответствующего пьезоэлектрического преобразователя 96, а каждое углубление 102 выполнено с возможностью размещения соответствующего пьезоэлектрического преобразователя 98. Волновод 103, например, дисперсионный волновод, прикреплен к цилиндрическому участку 94.
Следует понимать, что углубления 100 и 102 могут быть исключены. Например, верхняя поверхность цилиндрического участка 94 может быть по существу плоской, а для разъемного или неразъемного крепления преобразователей 96 и 98 к плоской верхней поверхности цилиндрического участка 94 могут быть использованы любые подходящие средства.
Как показано на Фиг. 11, параболический участок 92 содержит усеченную часть 104, расположенную на вершине параболического участка 92. Усеченная часть 104 является по существу плоской и имеет размер и форму, обеспечивающую размещение пьезоэлектрического преобразователя 97. Пьезоэлектрический преобразователь 97 расположен на усеченной части 106 так, что его продольная ось по существу сцентрирована с продольной осью волновода 103. В результате механические волны, излучаемые пьезоэлектрическим преобразователем 97, распространяются через концентратор 91 и передаются в волновод 104. Кривизна параболической поверхности параболического участка 92 и положение углублений 100 и 102 выбраны так, что механические волны, излучаемые каждым пьезоэлектрическим преобразователем 86, 88, распространяются через концентратор 91, отражаются от параболической поверхности параболического участка 92, а затем распространяются в фокальную зону 105. Первый конец волновода 103 расположен в фокальной зоне 105 так, что механические волны, формируемые пьезоэлектрическим преобразователем 96, 98, объединяются в волноводе 103.
Каждый из пьезоэлектрических преобразователей 96, 97 и 98 излучает соответствующую механическую волну, в момент, выбранный так, что различные механические волны прибывают в фокальную зону по существу одновременно. Механические волны, излучаемые преобразователями 96 и 98, после отражения от параболической поверхности фокусируются в фокальной зоне и объединяются с механической волной, излучаемой преобразователем 97, для создания механической волны, имеющей большую амплитуду, чем амплитуда механической волны, излучаемой каждым из пьезоэлектрических преобразователей 96, 97 и 98.
В варианте осуществления, где волновод 103 представляет собой дисперсионный волновод, действующий в качестве временного концентратора, пьезоэлектрические преобразователи 96, 97 и 98 могут управляться таким образом, чтобы сначала излучать более медленные составляющие волны, объединяемые в фокальной зоне 105 для создания более медленной составляющей волны с большей амплитудой, передаваемой в дисперсионный волновод 103 и распространяющейся вдоль него. Кроме того, пьезоэлектрические преобразователи 96, 97 и 98 управляются так, что затем излучают более быстрые составляющие волны, которые для создания более быстрой составляющей волны большей амплитуды объединяются в фокальной зоне 105, которая соединена с дисперсионным волноводом 103, и распространяются по нему. Быстрые и медленные составляющие волны с большой амплитудой объединяются друг с другом на втором конце дисперсионного волновода для создания необходимого механического импульса, имеющего большую амплитуду, чем амплитуда более быстрых и более медленных составляющих волн большей амплитуды.
В одном варианте осуществления для усиления пространственной концентрации механических волн в фокальной зоне 105 интервал распространения механической волны внутри концентратора 91 минимизирован, угол падения на параболическую поверхность участка 82 минимизирован, излучение поверхности максимизировано и/или рабочая длина волны поддерживается по возможности короткой по следующим причинам. Коэффициент усиления при пространственной фокусировке связан с площадью А излучающей поверхности, деленной на дальность распространения d и рабочую длину волны λ, т.е. коэффициент усиления ≈ A/(dλ). Могут быть рассмотрены другие эффекты распространения волн при движении механических волн в твердой среде. Например, когда механическая волна отражается границей раздела, такой как параболическая поверхность участка 92, в твердой среде может происходить преобразование типа колебаний (например, продольных колебаний в поперечные). Это преобразование типа колебаний связано с углом между падающей волной и границей раздела. Поскольку поперечные волны отражаются под углом, отличным от угла отражения продольных волн, они не фокусируются в той же зоне, что и продольные волны. Поэтому если в определенной степени наблюдается преобразование типа колебаний, часть входного сигнала может быть потеряна или поглощена. Кроме того, на некоторых рабочих длинах волн механический волновой фронт не перемещается по прямой, а расширяется в пространстве вследствие дифракции. Чем большее расстояние проходит волновой фронт, тем больше он расширяется в пространстве. Поэтому для усиления пространственной концентрации дальность распространения может поддерживаться по возможности короткой с целью ограничения расширения волнового фронта. Аналогично, для ограничения преобразования типа колебаний угол падения на параболическую поверхность может быть по возможности малым. Излучение поверхности может быть большим. Кроме того, чтобы свести к минимуму вышеупомянутые вредные эффекты, рабочая длина волны может быть, по возможности, уменьшена.
В одном варианте осуществления преобразователи 96, 97 и 98 представляют собой плоские пьезоэлектрические преобразователи, то есть их излучающая поверхность является плоской. Такие плоские пьезоэлектрические преобразователи менее дороги, чем пьезоэлектрические преобразователи с неплоской излучающей поверхностью. Кроме того, их излучающую поверхность легче соединять с пространственным концентратором 91. Кроме того, при использовании преимуществ параболической геометрии пространственного концентратора 91 и симметричном распределении преобразователи 86-88 на верхней поверхности вокруг основной оси, специалисту в данной области техники ясно, что управляющая электроника проще, поскольку один и тот же электронный сигнал излучения может использоваться аналогичными преобразователями и поскольку нет необходимости вводить какую-либо фазовую задержку. Например, один и тот же электронный сигнал может быть использован для управления четырьмя преобразователями 96, поскольку они образуют один канал.
В другом варианте осуществления преобразователи 96-98 могут быть не плоскими. Например, они могут быть сфокусированными преобразователями. В другом примере они могут быть асимметрично распределены вокруг оси концентратора 91. В еще одном примере преобразователи 96 и 98 могут не находиться на одной плоской поверхности.
В одном варианте осуществления усечение площади параболической поверхности уменьшает коэффициент усиления при фокусировке для составляющих волн, излучаемых преобразователями 96 и 98. Тем не менее, добавление преобразователя 97 на усеченную часть участка 92 позволяет увеличить коэффициент усиления при фокусировке по сравнению с коэффициентом усиления при фокусировке, достижимым в отсутствие датчика 97 и в отсутствие усечения параболического участка 92. В одном варианте осуществления расстояние между фокальной зоной 105 и усеченным участком 104 и площадь поверхности выбраны соответствующим образом. Несомненно, что в соответствии с рабочей длиной волны и размером целевой фокальной зоны существуют оптимальное расстояние и площадь поверхности, которые усиливают пространственную концентрацию преобразователя, используемого на усеченном участке.
В одном варианте осуществления концентратор 91 реализован с использованием геометрических соотношений параболы и теории распространения света в качестве первой гипотезы. Затем разрабатывают числовую модель на основе метода конечных элементов. После определения соответствующих параметров (таких как среда распространения, граничные условия, условия возбуждения и/или преобразование) эту модель используют для оценки влияния различных геометрических параметров на коэффициент усиления в фокальной зоне. Например, оценивают различные формы, параболические или непараболические, площадь излучающей поверхности, распределение зон излучения и толщину концентратора. Кроме того, для оценки взаимодействия и для интеграции концентратора с другими элементами системы могут быть разработаны и использованы соответствующие числовые модели.
В одном варианте осуществления между концентратором 91 и преобразователями 96-98 может вводиться слой материала для согласования импеданса, например, глицерина, для уменьшения потерь соединения. Кроме того, волновод 103 механически соединен с концентратором 91 в фокальной зоне 105. Например, в качестве механического соединения может быть использована сварка.
Несмотря на то, что на Фиг. 9-11 показаны цилиндрические преобразователи, имеющие плоскую излучающую поверхность, следует понимать, что могут быть использованы и преобразователи другой формы. Например, форма преобразователей может быть кольцевой, шестиугольной, квадратной, треугольной, круговой и т.п.
Следует также понимать, что количество и расположение преобразователей 96-98 относительно концентратора может быть различным. Например, несмотря на то, что концентратор 91 содержит одну плоскую часть, расположенную на параболической поверхности для размещения преобразователя 97, т.е. усеченную часть, специалисту в данной области техники ясно, что параболическая поверхность может содержать более чем одну плоскую часть. Каждая плоская часть выполнена с возможностью размещения соответствующего преобразователя, излучающего механические волны в направлении фокальной зоны 105. Затем части параболической поверхности, расположенные между плоскими частями, могут быть использованы для отражения механических волн, излучаемых преобразователями, расположенными выше концентратора, в направлении фокальной зоны 105.
Следует понимать, что концентратор 91 может быть изготовлен из любого подходящего материала, в котором могут распространяться механические волны. Например, концентратор 91 может быть изготовлен из стекла, свинца, текучей среды, газа, жидкого металла, нержавеющей стали, титана, нитинола и т.д.
Несмотря на то, что преобразователи 96-98 снабжены плоской излучающей поверхностью, следует понимать, что возможны и другие конструкции. Например, преобразователи могут быть снабжены вогнутой излучающей поверхностью. В данном случае углубления также имеют выпуклую форму, соответствующую форме соответствующего вогнутого преобразователя для размещения соответствующего вогнутого преобразователя. Также могут быть использованы преобразователи 96-98 с акустической линзой.
В отношении передающего элемента 66 специалисту в данной области техники ясно, что функция передающего элемента 66 заключается в распространении механических импульсов большой амплитуды от его проксимального конца 86 до его дистального конца 88. Проксимальный конец 86 расположен вне организма пациента и неразъемно или разъемно подключен к пространственному концентратору 64. Дистальный конец 88 вводят в кровеносный сосуд пациента с помощью катетера или без него.
В одном варианте осуществления передающий элемент 66 выполнен из одного материала. В другом варианте осуществления передающий элемент 66 может быть выполнен из разных материалов. Например, передающий элемент 66 может содержать первый участок, расположенный рядом с проксимальным концом 86 и остающийся вне организма пациента, и второй участок, прилегающий к дистальному концу 88 и выполненный с возможностью введения в кровеносный сосуд пациента. В данном случае первый участок может быть выполнен из первого материала, предназначенного для распространения механических импульсов большой амплитуды, а второй участок может быть выполнен из второго (другого) материала, также предназначенного для распространения импульсов большой амплитуды и, кроме того, являющегося биологически совместимым.
В одном варианте осуществления второй участок передающего элемента содержит покрытие с низким коэффициентом трения (например, гидрофобное покрытие, гидрофильное покрытие, покрытие из политетрафторэтилена (PTFE) и т.д.) или поверхность, специально обработанную для уменьшения трения.
В одном варианте осуществления второй участок передающего элемента содержит покрытие с низким или высоким акустическим импедансом по сравнению с акустическим импедансом сердечника передающего элемента, чтобы улавливать энергию в сердечнике передающего элемента и предотвращать или, по меньшей мере, уменьшать утечку энергии. Примеры материалов с низким или высоким акустическим импедансом включают в себя вольфрам, аэрогель, улавливающую газ оболочку и т.п.
В одном варианте осуществления второй участок передающего элемента содержит покрытие с низким или высоким акустическим импедансом и покрытие с низким коэффициентом трения, при этом покрытие с низким коэффициентом трения полностью или частично покрывает покрытие с низким или высоким акустическим импедансом.
В одном варианте осуществления передающий элемент 66 может дополнительно содержать третий участок, расположенный между первым и вторым участками. Третий участок обеспечивает пользователю, например, оперирующему врачу, возможность манипулирования или возможность применения захватывающего приспособления, например, торсионного устройства.
В одном варианте осуществления первый, второй и/или третий участок выполнены из гибкого или эластичного материала, который, по существу, не подвержен пластической деформации, когда второй участок следует по извилистому пути внутри кровеносного сосуда, ведущего к окклюзии, или когда третьим участком манипулирует пользователь.
В одном варианте осуществления передающий элемент 66 выполнен из того же материала, что и элемент, к которому прикреплен его проксимальный конец, чтобы обеспечить улучшенное введение механических импульсов в передающий элемент 66 и, следовательно, уменьшить потери соединения.
В одном варианте осуществления передающий элемент 66 выполнен из материала с малым коэффициентом ослабления, такого как нержавеющая сталь, алюминий или алюминиевые сплавы, титан или титановые сплавы, например, Ti-6Al-4V или Ti-11,5Mo-6Zr-4,5Sn (титан бета III), нитинол, плавленый кварц и т.п. В одном варианте осуществления, по меньшей мере, часть передающего элемента 66 может быть подвергнута термической обработке, например, отжигу.
В одном варианте осуществления передающий элемент 66 имеет микроструктуру, обеспечивающую низкий коэффициент ослабления и получаемую посредством одного или ряда процессов термической обработки и горячей или холодной механической обработки.
В одном варианте осуществления передающий элемент 66 выполнен из материала, имеющего хорошие механические свойства, такие как достаточная прочность на растяжение, достаточная передача крутящего момента и достаточная устойчивость к изгибанию.
В одном варианте осуществления передающий элемент 66 выполнен с возможностью выдерживать высокую нагрузку или деформацию, создаваемую механическим импульсом, распространяющимся по нему. В том же или в другом варианте осуществления передающий элемент 66 выполнен стойким к усталостным явлениям, связанным с повторяющимся прохождением (периодическим режимом) механических импульсов.
В одном варианте осуществления размер поперечного сечения передающего элемента 66, например, диаметр цилиндрического волновода, мал по сравнению со средней длиной волны механического импульса, распространяющегося по нему, так что передающий элемент 66 является недисперсионным или слабо дисперсионным, чтобы уменьшить утечку энергии.
В одном варианте осуществления размер поперечного сечения передающего элемента 66, например, диаметр цилиндрического передающего элемента, достаточно велик, чтобы позволять передающему элементу 66 выдерживать толкающее усилие, прикладываемое пользователем и необходимое для продвижения дистального конца 88 по кровеносному сосуду или внутри катетера и для проникновения в окклюзию, а также для обеспечения безопасного и эффективного управления дистальным концом 88.
В одном варианте осуществления наружная поверхность передающего элемента 66 или, по меньшей мере, второй участок передающего элемента 66 имеет микроскопические детали, такие как тонкая резьба, или имеет покрытие определенного типа, которое может захватывать микроскопические пузырьки, действующие в качестве защитного слоя, предотвращающего утечку энергии.
В варианте осуществления, где передающий элемент 66 вводится в катетер, форма поперечного сечения передающего элемента 66 обеспечивает возможность минимизации физического контакта внутри катетера для минимизации утечки энергии и/или трения. Например, если катетер содержит круглую полость, в которую вводится передающий элемент 66, то передающий элемент 66 может иметь квадратное поперечное сечение, чтобы ограничить контакт с катетером четырьмя углами квадрата. В другом варианте осуществления для минимизации контакта с катетером наружная поверхность передающего элемента 66 может быть снабжена небольшими элементами, например, выпуклостями, по его длине.
В одном варианте осуществления проксимальный конец 86 передающего элемента 66 и/или первый участок передающего элемента 66 не имеет покрытия и контактирует с окружающим воздухом, поскольку по существу отсутствует граничное трение или утечка энергии, подлежащая предотвращению или уменьшению.
Следует понимать, что проксимальный конец 86 передающего элемента 66 может иметь любую подходящую форму. Например, проксимальный конец 86 может быть по существу плоским. В другом варианте осуществления проксимальный конец может быть закругленным, как показано на Фиг. 12, которая иллюстрирует волновод 106, имеющий закругленный проксимальный конец 107, выступающий из волновода 106. Элемент 108, к которому должен быть прикреплен волновод 106, содержит круглую выемку на конце 109, которая соответствуют закругленному концу 107 волновода 106. Такая конструкция улучшает сопряжение волновода 106 с элементом 108 и способна компенсировать несоосность.
В одном варианте осуществления проксимальный конец 86 передающего элемента 66 служит в качестве точки входа для его продвижение в оборудование для доставки по проводнику, например катетер, баллон или стент.
В одном варианте осуществления проксимальный конец 86 передающего элемента 66 выполнен из материала, имеющего акустический импеданс, совместимый с импедансом элемента, к которому он прикреплен, например, пространственного концентратора 64.
Дистальный конец 88 передающего элемента 66 используется для излучения механических импульсов из сердечника передающего элемента 66 в направлении окклюзии 52. Дистальный конец 88 также может быть использован для создания прохода и перемещения через окклюзию 52, увеличения диаметра прохода и/или задания направления излучаемых механических импульсов.
В варианте осуществления, где передающий элемент 66 должен быть веден в катетер, дистальный конец 88 передающего элемента 66 может быть выполнен таким образом, чтобы облегчать его введение в катетер в направлении окклюзии. В одном варианте осуществления на дистальный конец 88 передающего элемента может быть нанесено гидрофобное покрытие для удаления крови из катетера при продвижении дистального конца 88 к окклюзии 52 и для уменьшения количества крови, окружающей передающий элемент 66 и способствующей утечке энергии.
В одном варианте осуществления на дистальный конец 88 передающего элемента 66 нанесено гидрофильное покрытие для облегчения его введения в катетер.
В одном варианте осуществления для увеличения передачи энергии от передающего элемента 66 к окклюзии 52 акустический соединитель прикреплен к дистальному концу 88 передающего элемента 66.
В одном варианте осуществления рентгеноконтрастные метки, такие как вольфрам, золотые полосы, покрытие с высокой плотностью, кольцо с высокой плотностью, катушка с высокой плотностью или полимерная оболочка с плотными металлическими порошками в качестве наполнителя, прикреплены к дистальному концу 88 передающего элемента 66, чтобы служить в качестве опорных точек для визуализации с помощью рентгеновских лучей положения дистального конца относительно окклюзии 52 и относительно других устройств ЧТА.
В одном варианте осуществления дистальный конец 88 передающего элемента 66 является по существу плоским. В одном варианте осуществления для увеличения выхода энергии в направлении продольной оси, вдоль которой расположен передающий элемент 66, плоская поверхность дистального конца 88 по существу ортогональна наружной продольной поверхности передающего элемента 66, расположенной по его длине. В другом варианте осуществления плоская поверхность конца 88 скошена или находится под углом относительно указанной продольной оси. Такая форма также позволяет смещать электрод в сторону, что приводит к возникновению биения, которое может быть использовано для расширения прохода, созданного в окклюзии, или для подготовки сосуда перед применением баллона во время процедуры ЧТА. Следует понимать, что дистальный конец 88 может иметь любую подходящую форму, помимо плоской. Например, дистальный конец может иметь закругленную форму, например, полусферическую форму. Поверхность дистального конца 88 может иметь любую подходящую форму от закругленной формы до плоской формы. Например, поверхность дистального конца 88 может быть по существу плоской со сглаженным или закругленным краем, который должен быть по возможности нетравмоопасным для биологических тканей. В другом примере дистальный конец может иметь форму для фокусировки механической энергии в направлении от дистального конца 88. Такая фокусирующая форма может быть вогнутой, например, круглой или параболической формой. Такая фокусирующая форма может обеспечивать фокусировку механического импульса по продольной оси передающего элемента или вне этой оси.
В одном варианте осуществления дистальный конец 88 передающего элемента 66 может иметь такую форму, чтобы направлять механический импульс, по меньшей мере, частично, в радиальном направлении. Эта конструкция может быть использована для создания прохода в окклюзии 52 с диаметром, большим диаметра дистального конца 88. Кроме того, такой вариант осуществления может быть использован для подготовки участка патологического изменения перед применением баллона во время процедуры ЧТА.
На Фиг. 13 показана конструкция, в которой передающий элемент или волновод 110 снабжен дистальным концом, выполненным с возможностью частичного излучения радиальной механической волны. Выступ 112, имеющий форму усеченного конуса, выступает из дистального конца волновода 112. Выступ 112 находится между круговой дистальной стенкой, расположенной вдали от волновода 110, и круговой проксимальной стенкой, прикрепленной к волноводу 110. Усеченная коническая стенка расположена между круговыми проксимальной и дистальной стенками. В иллюстрируемом варианте осуществления волновод 110 и выступ 112 являются коаксиальными.
В другой конструкции дистальный конец передающего элемента может быть разделен на области вдоль направления, по существу параллельного его продольной оси так, что когда механический импульс достигает этой области, он отводит эти области от поверхности раздела, что обеспечивает возможность перенаправления некоторой части энергии в радиальном направлении. В другой конструкции дистальный конец передающего элемента может иметь переменный изгиб вдоль продольной оси для перенаправления некоторой части механической энергии в радиальном направлении. Тем не менее, специалисту в данной области техники ясно, что возможны и другие конструкции.
Как показано на Фиг. 13, центральная часть механической энергии, схематически обозначенная стрелкой 114, распространяется через выступ 112 для создания продольной механической волны, схематически обозначенной стрелкой 116, которая распространяется, по существу, вдоль продольной оси волновода 110 в направлении наружу от волновода 110 к окклюзии 52. Периферийная часть механической энергии, схематически обозначенная стрелкой 118 вблизи наружной поверхности волновода 110, распространяется в направлении наружу от волновода 110 и отражается усеченной конической стенкой выступа 112 для создания радиальной механической волны.
Несмотря на то, что в иллюстрируемом варианте осуществления направление распространения радиальной механической волны по существу ортогонально направлению распространения продольной механической волны, следует понимать, что возможны и другие конструкции за счет изменения угла между волноводом 110 и усеченной конической стенкой выступа 112. Кроме того, такая конструкция не должна быть симметричной вблизи основной оси ультразвукового волновода.
Специалисту в данной области техники ясно, что количество энергии, преобразованной в радиальную механическую волну, может изменяться за счет соответствующего изменения площади поверхности дистальных и/или проксимальных стенок выступа 112.
В одном варианте осуществления участок передающего элемента 66, смежный с дистальным концом 88, может быть изогнутым или выполненным с возможностью изгибания, так что пользователь может придавать постоянную или временную кривизну пальцами, инжектором металлической иглы или инструментом. Изгиб на дистальном конце 88 может быть использован для управления передающим элементом (то есть для задания направления передающему элементу), когда его проталкивают вперед в кровеносном сосуде или в окклюзии, и/или для изменения направления формируемого механического импульса.
В одном варианте осуществления передающий элемент 66 имеет форму поперечного сечения и/или размеры поперечного сечения, которые по существу постоянны по его длине. Например, передающий элемент 66 может иметь круглую форму поперечного сечения, диаметр которого по существу постоянен по его длине. В одном варианте осуществления диаметр волновода 66 составляет от приблизительно 0,004 дюйма до приблизительно 0,035 дюйма.
В другом варианте осуществления форма поперечного сечения и/или размеры передающего элемента 66 могут изменяться вдоль его длины. Например, первый участок передающего элемента 66, смежный с проксимальным концом 86, и/или второй участок передающего элемента 66, смежный с дистальным концом 88, может иметь форму поперечного сечения и/или размер, отличающийся от третьего участка, расположенного между первым и вторым участками. В другом примере передающий элемент 66 может содержать, по меньшей мере, один сужающийся участок для усиления механических импульсов.
Например, проксимальный конец 86 может иметь круглую форму поперечного сечения, имеющую первый диаметр, а третий участок передающего элемента 66 может иметь круглую форму поперечного сечения, имеющую второй (другой) диаметр. Например, первый диаметр может быть больше, чем второй диаметр. В другом примере второй диаметр может быть больше, чем первый диаметр. В одном варианте осуществления диаметр передающего элемента 66 плавно изменяется от первого диаметра до второго диаметра на длине определенного участка передающего элемента 66.
В другом примере проксимальный конец 86 может иметь первую форму поперечного сечения, а третий участок передающего элемента 66 может иметь вторую (другую) форму поперечного сечения. Например, проксимальный конец 86 может иметь квадратную форму поперечного сечения, а третий участок передающего элемента 66 может иметь круглую форму поперечного сечения. В другом примере проксимальный конец 86 может иметь шестиугольную форму поперечного сечения, а третий участок передающего элемента 66 может иметь круглую форму поперечного сечения. В одном варианте осуществления форма передающего элемента 66 плавно изменяется от первой формы поперечного сечения до второй формы поперечного сечения на длине определенного участка передающего элемента 66.
В одном варианте осуществления размер дистального конца 88 меньше размера третьего участка передающего элемента 66 для увеличения гибкости дистального конца 88.
В другом варианте осуществления размер дистального конца 88 больше размера третьего участка волновода 66 для удаления крови из катетера, в который вводится дистальный конец 88 передающего элемента 66, когда дистальный конец 88 перемещают к окклюзии.
В дополнительном варианте осуществления для увеличения размера отверстия в окклюзии при сохранении большой гибкости дистального конца 88, размер дистального конца 88 больше размера третьего участка передающего элемента 66.
В одном варианте осуществления передающий элемент может быть составлен из множества отдельных проводников. В другом варианте осуществления передающий элемент может иметь, в целом, трубчатую форму.
В одном варианте осуществления передающий элемент, такой как волновод 66, выполнен с возможностью совместного использования с традиционными устройствами ЧТА. В одном варианте осуществления передающий элемент имеет диаметр, меньший приблизительно 0,125 дюйма и предпочтительно составляющий менее приблизительно 0,035 дюйма. В одном варианте осуществления соотношение размеров (определяемое как длина/диаметр) передающего элемента выбрано равным более 100 и предпочтительно более 1000. В одном варианте осуществления передающий элемент имеет длину от приблизительно 60 дюймов до приблизительно 120 дюймов. В другом варианте осуществления передающий элемент имеет длину от приблизительно 36 дюймов до приблизительно 200 дюймов.
В одном варианте осуществления, по меньшей мере, дистальный участок передающего элемента является гибким, чтобы во время предполагаемого применения с легкостью изгибаться или искривляться. Например, дуга аорты может иметь радиус кривизны приблизительно 1 дюйм. Поэтому гибкий передающий элемент может быть согнут так, чтобы обеспечить радиус кривизны приблизительно 1 дюйм или меньше.
В одном варианте осуществления передающий элемент может иметь фирменный интерфейс на своем проксимальном конце, так что только последний может быть подключен к источнику энергии. Это может быть реализовано в виде дополнительных особенностей проксимального конца передающего элемента. Кроме того, в начале процедуры может проверяться фирменная акустическая сигнатура передающего элемента с использованием эхоимпульсного метода. Также может быть использована электронная микросхема, которая может быть распознана только фирменным соединителем.
В одном варианте осуществления передающий элемент может быть выполнен из нитинола, нержавеющей стали, титанового сплава, плавленого кварца и т.п. Эти материалы обеспечивают достаточную степень передачи акустической волны, жесткость и возможность передачи крутящего момента. Тем не менее, также может быть использован передающий элемент на текучей среде или газе.
Как описано выше, два компонента или элемента системы 50 могут быть разъемно прикреплены друг к другу. Фигуры 14-16 иллюстрируют такую конструкцию, в которой конус 150 разъемно прикреплен к дисперсионному волноводу 152. Следует понимать, что волновод 152 может быть недисперсионным. На Фиг. 14-16 дополнительно показан передающий элемент 154, который выполнен заодно с конусом 150. В качестве альтернативы конус 150 и передающий элемент 154 могут быть сварены друг с другом. Гнездовой соединитель 160 и штыревой соединитель 162 образуют соединительное устройство, используемое для разъемного соединения конуса 150 с дисперсионным волноводом 152. Следует понимать, что соединительное устройство, показанное на Фиг. 14-16, может быть использовано для соединения друг с другом любых видов механических волноводов, имеющих фланец на соединительном конце, в частности, конусов, волноводов постоянного диаметра и т.п.
Проксимальный конец 164 конуса 150 снабжен фланцем 166, расположенным радиально снаружи конуса 150 вокруг проксимального конца 164. Втулка 168 установлена вокруг конуса 150 и находится рядом с его проксимальным концом 164. Следует понимать, что конус 150 входит во втулку 168, а втулка 168 может перемещаться вдоль конуса 150. Аналогично, дистальный конец 170 дисперсионного волновода 152 снабжен фланцем 172, расположенным радиально снаружи дисперсионного волновода 152 вокруг дистального конца 170. Втулка 174 установлена вокруг дисперсионного волновода 152 и находится рядом с его дистальным концом 170. Следует понимать, что конус 150 входит во втулку 168 и она может перемещаться вдоль конуса 150. Втулки 168 и 174 используются для центрирования и они могут быть выполнены из пластика или металлического материала, чтобы уменьшить утечку энергии.
Несмотря на то, что в иллюстрируемом варианте осуществления фланцы 166 и 172 расположены по всей окружности проксимального конца 164 и дистального конца 170, соответственно, следует понимать, что, по меньшей мере, один из двух фланцев 166 и 172 может быть расположен только вдоль части окружности его соответствующего конца 164, 170. Следует понимать, что диаметр фланцев 166 и 172 может изменяться, оставаясь большим, чем диаметр проксимального конца 164 конуса 150 и диаметр дистального конца 170 дисперсионного волновода 152, соответственно. Несмотря на то, что в иллюстрируемом варианте осуществления фланцы 166 и 172 имеют по существу одинаковый диаметр, возможны и другие конструкции.
Гнездовой соединитель 160 содержит трубчатое тело 180, снабженное отверстием 182, расположенным между его проксимальным и дистальным концами, в которое входит конус 150 и, необязательно, передающий элемент 154. Размер поперечного сечения отверстия 182 больше размера узла, образованного конусом 150 и передающим элементом 154, так что конус 150 может вдвигаться внутрь отверстия 182, а гнездовой соединитель 160 может вращаться вокруг конуса 150. Участок 184 внутренней стенки тела 180, смежный с проксимальным концом гнездового соединителя 160, выполнен с резьбой.
Штыревой соединитель 162 содержит трубчатое тело 190, снабженное отверстием 192, расположенным между его проксимальным и дистальным концами, в которое входит дисперсионный волновод 152. Размер поперечного сечения отверстия 192 больше размера дисперсионного волновода 152, так что дисперсионный волновод 152 может вдвигаться внутрь отверстия 192, а штыревой соединитель 162 может вращаться вокруг дисперсионного волновода 152. Участок 194 внутренней стенки тела 190, расположенный рядом с дистальным концом штыревого соединителя 162, снабжен резьбой, причем его резьба соответствует резьбе участка 184 гнездового соединителя, так что резьбовой участок 194 штыревого соединителя 162 может быть ввинчен в резьбовой участок 184 гнездового соединителя 160.
Чтобы соединить гнездовой соединитель 160 со штыревым соединителем 162, конус 150 вводят в гнездовой соединитель 160 до тех пор, пока дистальный скошенный конец 196 втулки 168 не упрется в скошенную поверхность 198 выступа, который выступает из внутренней стенки тела 180, как показано на Фиг. 16. Дистальный конец 170 дисперсионного волновода 152 вводят в гнездовой соединитель, пока он не упрется в проксимальный конец 164 конуса 150. Затем резьбовой участок 194 ввинчивают в гнездовой соединитель. При ввинчивании штыревого соединителя 162 в гнездовой соединитель 160 проксимальный скошенный конец втулки 174 упирается в скошенную поверхность внутренней стенки тела 190.
Скошенная поверхность втулки 168 и соответствующая скошенная поверхность внутренней стенки тела 180 взаимодействуют друг с другом для центрирования конуса 150 в отверстии 182 гнездового соединителя 160 так, чтобы гнездовой соединитель 160 не находился в физическом контакте с конусом 150 или с передающим элементом 154 для предотвращения или, по меньшей мере, уменьшения утечки энергии. Аналогично, скошенная поверхность 197 втулки 174 и соответствующая скошенная поверхность 199 дистального конца тела 190 взаимодействуют друг с другом для центрирования дисперсионного волновода 152 внутри отверстия 192 штыревого соединителя 162 так, чтобы штыревой соединитель 162 не находится в физическом контакте с дисперсионным волноводом 152 для предотвращения или, по меньшей мере, уменьшения утечки энергии.
В одном варианте осуществления между дисперсионным волноводом 152 и конусом 150 может быть вставлен материал для согласования импеданса. Кроме того, для обеспечения оптимального соединения между ними и гарантированной передачи продольной механической волны, между дисперсионным волноводом 152 и конусом 150 может быть добавлена пленка глицерина. В другом примере между дисперсионным волноводом 152 и конусом 150 введена пленка ультразвукового геля.
Следует понимать, что соединители 160 и 162 могут быть выполнены из любого подходящего материала, например, нержавеющей стали, титанового сплава, пластика и т.п.
В одном варианте осуществления фланцы 166 и 172 имеют меньшую толщину, чем центральная длина волны механического импульса, чтобы свести к минимуму дифракцию механического импульса на фланцах 166 и 172.
В одном варианте осуществления фланцы 166 и 172 могут быть исключены и заменены углублениями, предусмотренными в конусе 150 и дисперсионном волноводе 152. В этом случае удерживающий механизм может содержать захват. Что касается конструкции, содержащей фланцы, углубления позволяют не увеличивать общий диаметр дисперсионного волновода 152 и конуса 150.
Несмотря на то, что в иллюстрируемом варианте осуществления для разъемного соединения двух соединителей 160 и 162 друг с другом использованы резьбовые участки, следует понимать, что для разъемного соединения этих двух соединителей друг с другом могут быть использованы любые другие подходящие средства крепления.
На Фиг. 17 показан пример конструкции соединительного устройства 230 для разъемного соединения первого механического волновода 231, например, дисперсионного волновода, со вторым механическим волноводом 232, например, передающим элементом. В данном варианте осуществления проксимальный конец передающего элемента 232 снабжен фланцем 233, а дистальный конец дисперсионного волновода 231 снабжен фланцем 234.
Соединительное устройство 230 содержит штыревой соединитель 235, имеющий отверстие 236 для размещения в нем первого волновода 232. Первое отверстие 236 содержит первый участок для размещения фланца 233 первого механического волновода 232 и второй участок. Внутренняя поверхность штыревого соединителя 235 содержит выступ 237, образующий второй участок отверстия 236. Выступ 237 содержит опорную поверхность для упора во фланец 233 механического волновода 232. Размеры второго участка отверстия 236 больше, чем размеры механического волновода 232, поэтому когда волновод 232 вставлен в штыревой соединитель 235, выступ 237 не находится в физическом контакте с боковой поверхностью механического волновода 232.
Соединительное устройство 230 дополнительно содержит гнездовой соединитель 238, имеющий отверстие 239 для размещения в нем механического волновода 231. Отверстие 239 содержит первый участок для размещения в нем фланца 234 механического волновода 231 и части штыревого соединителя 235 и второй участок. Внутренняя поверхность гнездового соединителя 238 содержит выступ 240, образующий второй участок отверстия 239. Выступ 240 содержит опорную поверхность для упора во фланец 234 механического волновода 231. Размеры второго участка отверстия 239 больше размеров механического волновода 231, поэтому когда механический волновод 231 вставлен в гнездовой соединитель 238, выступ 240 не находится в физическом контакте с механическим волноводом 231.
В одном варианте осуществления отверстия 236 и 239 имеют цилиндрическую форму. В этом случае второй участок отверстия 236 имеет диаметр, больший, чем диаметр механического волновода 232, и меньший, чем диаметр фланца механического волновода 232. Второй участок отверстия 239 имеет диаметр, больший, чем диаметр механического волновода 231, и меньший, чем диаметр фланца второго механического волновода.
В одном варианте осуществления часть штыревого соединителя 235, выполненная с возможностью введения в гнездо 238 соединителя, содержит первую резьбу, расположенную на его внешней поверхности. Внутренняя поверхность гнездового соединителя 238 содержит вторую резьбу в первом участке отверстия 239, причем вторая резьба соответствует первой резьбе, так что гнездовой соединитель 235 и штыревой соединитель 238 могут быть соединены друг с другом посредством резьбы.
В одном варианте осуществления фланец 233 расположен по всей окружности механического волновода 232, а фланец 234 расположен по всей окружности механического волновода 231.
Следует понимать, что соединительное устройство 230 может быть использовано для соединения любых волноводов, снабженных фланцем. Например, соединительное устройство 230 может быть использовано для соединения друг с другом конуса и цилиндрического волновода.
После соединения друг с другом штыревой соединитель и гнездовой соединитель находятся в физическом контакте только с фланцами волноводов. Такая конструкция позволяет уменьшить поверхность контакта между соединителями и дисперсионным волноводом и передающим элементом для уменьшения утечки энергии.
В другом варианте осуществления для разъемного соединения передающего элемента и дисперсионного волновода проксимальный конец передающего элемента может быть резьбовым, а дистальный конец дисперсионного волновода может быть снабжен отверстием с резьбой, в которую ввинчен передающий элемент. Следует понимать, что такое соединение может быть использовано для разъемного крепления конуса к дисперсионному волноводу, передающего элемента к конусу и т.п.
На Фиг. 18 показан еще один пример соединительного устройства 250 между конусом 252 и передающим волноводом 254. Узел соединительного устройства содержит гнездовой соединитель 256, имеющий трубчатую форму и установленный с возможностью перемещения по конусу, и штыревой соединитель 258, установленный на передающем элементе. Дистальный конец конуса снабжен фланцем 260, расположенным в радиальном направлении снаружи по его окружности.
Гнездовой соединитель 256 содержит трубчатое тело, имеющее внутреннюю резьбовую поверхность, и выступ 261, имеющий опорную поверхность 262. Штыревой соединитель 258 содержит два полутрубчатых тела 264, зафиксированных вокруг передающего элемента 254. Каждое полутрубчатое тело 264 снабжено зубцами 266, например, острыми или заостренными выступами, выступающими из его внутренней поверхности, и резьбовой наружной поверхностью, выполненной с возможностью резьбового соединения с внутренней резьбовой поверхностью гнездового соединителя 256. Два полутрубчатых тела 264 могут быть зафиксированы вокруг передающего элемента 254 с использованием любых подходящих зажимных средств. В этом случае зубцы 266 образуют углубления в передающем элементе 254, а два сжатых полутрубчатых тела 264 неподвижно скреплены друг с другом и неподвижно зафиксированы на передающем элементе 254 с образованием резьбового болта. После сжимания полутрубчатых тел 264 вокруг передающего элемента 254 резьбовой болт ввинчивают в гнездовой соединитель 256. При ввинчивании резьбового болта в гнездовой соединитель опорная поверхность 262 гнездового соединителя 256 упирается во фланец 260 конуса 252, а дистальный конец конуса 252 упирается в проксимальный конец передающего элемента 254.
В другом варианте осуществления два полутрубчатых тела 264 могут не быть сжатыми друг с другом. В этом случае два полутрубчатых тела 264 прижаты к волноводу 254, а узел, образованный из двух полутрубчатых тел 264 и волновода 254, ввинчен в гнездовой соединитель 256.
В одном варианте осуществления использование зубцов 266 для крепления передающего элемента 254 к штыревому соединителю 258 позволяет уменьшить площадь поверхности передающего элемента 254, находящейся в физическом контакте со штыревым соединителем 258, что сводит к минимуму потери при распространении механических импульсов, распространяющихся в передающем элементе 254.
В одном варианте осуществления наружная поверхность передающего элемента 254 снабжена углублениями, каждое из которых имеет форму и размер, подходящие для размещения соответствующего зубца 266. Например, форма и размеры этих углублений могут, по существу, соответствовать форме и размерам зубцов, так что каждый зубец может быть плотно вставлен в соответствующее углубление. В данном случае введение зубцов 266 в соответствующие углубления позволяет исключить любое перемещение передающего элемента 254 вдоль его продольной оси относительно штыря 258 соединителя.
В одном варианте осуществления углубления могут быть результатом сжимания двух полутрубчатых тел 264, которые вжимают зубцы 266 в передающий элемент 254, тем самым создавая углубления. В данном случае зубцы 266 могут быть выполнены из материала, имеющего большую твердость, чем материал, из которого изготовлен передающий элемент 254.
В другом варианте осуществления углубления могут быть выполнены до крепления штыря 258 соединителя.
Несмотря на то, что в иллюстрируемом варианте осуществления зубцы двух полутрубчатых тел 264 выровнены друг относительно друга, то есть каждый зубец одного из двух полутрубчатых тел 264 выровнен относительно соответствующего зубца другого из двух полутрубчатых тел 264, следует понимать, что зубцы двух полутрубчатых тел 264 смещены.
Следует также понимать, что количество, положение и ориентация зубцов 266 на каждом из двух полутрубчатых тел 264 может отличаться. Например, может отличаться расстояние между двумя смежными зубцами вдоль внутренней поверхности полутрубчатых тел 264.
Следует понимать, что зубцы 266 могут быть любой подходящей формы. В одном варианте осуществления зубцы 266 могут быть острыми или заостренными. Например, зубцы могут иметь пирамидальную форму, коническую форму и т.п. В другом примере зубцы могут быть скругленными.
Несмотря на то, что в иллюстрируемом варианте осуществления штыревой соединитель 258 содержит два полутрубчатых тела 264, следует понимать, что штыревой соединитель 258 может содержать единственное полутрубчатое тело 264. В этом случае для неподвижного крепления полутрубчатого тела 264 к передающему элементу 254 используются крепежные средства. Например, для этого может использоваться кабельный бандаж.
В одном варианте осуществления зубцы 266 выполнены из того же материала, что и передающий элемент 254. В другом варианте осуществления зубцы 266 и передающий элемент 254 выполнены из разных материалов. Например, зубцы 266 могут быть выполнены из материала, имеющего большую твердость, чем материал, из которого изготовлен передающий элемент 254.
Несмотря на то, что в иллюстрируемом варианте осуществления зубцы 266 выступают из полутрубчатых тел 264, специалисту в данной области техники ясно, что зубцы 266 могут быть исключены и заменены зубцами, выступающими в радиальном направлении наружу из боковой поверхности передающего элемента 254. В данном случае зубцы, выступающие из передающего элемента 254, образуют углубления на внутренней поверхности двух полукруглых корпусов 264, когда два полутрубчатых тела 264 скрепляются или сжимаются друг с другом, тем самым фиксируя два полутрубчатых тела 264 на передающем элементе 254.
В одном варианте осуществления полоса частот источника энергии, используемого в настоящей системе, выраженная в процентах от центральной частоты fc, составляет больше, чем приблизительно 10% и предпочтительно составляет от приблизительно 40% до приблизительно 120%. Центральная или основная частота fc широкополосного источника энергии может изменяться в пределах от приблизительно 20 кГц до приблизительно 10 МГц и предпочтительно составляет от приблизительно 0,1 МГц до приблизительно 1 МГц.
Мощность широкополосного источника и уровень управления выходным сигналом широкополосного источника могут быть охарактеризованы длительностью импульса, частотой повторения, амплитудой давления, полярностью и типом волны. В одном варианте осуществления длительность механического импульса на дистальном конце передающего элемента обычно имеет порядок 1/fc. Например, источник энергии, имеющий центральную частоту 500 кГц, будет формировать механический импульс, имеющий длительность приблизительно 2 мкс при полосе частот шириной 100% (т.е. коэффициент Q=1). В одном варианте осуществления длительность механического импульса может изменяться за счет изменения центральной частоты или полосы частот (т.е. коэффициента Q) источника энергии, при этом длительность импульса предпочтительно составляет меньше, чем приблизительно 1 мс.
Частота повторения импульсов связана с количеством импульсов, которые могут быть переданы в течение определенного периода времени. В одном варианте осуществления частота повторения может изменяться от приблизительно 0,1 Гц до приблизительно 1000 Гц и предпочтительно составляет от приблизительно 10 Гц до приблизительно 200 Гц.
В одном варианте осуществления амплитуда выходного давления механического импульса, создаваемого на выходе передающего элемента, больше, чем приблизительно 10 МПа, как при сжатии, так и при растяжении. В одном варианте осуществления амплитуда выходного давления составляет от приблизительно 10 МПа до приблизительно 1000 МПа при сжатии и от приблизительно 10 МПа до приблизительно 500 МПа в растяжении, при измерении на дистальном конце передающего элемента в текучей среде.
Амплитуду создаваемого механического импульса можно изменять разными способами. Например, увеличение или уменьшение напряжения возбуждения, по меньшей мере, одного из преобразователей приводит к тому, что амплитуда механического импульса соответствующим образом изменяется. В другом примере обрезка амплитуды электрических сигналов в любом месте между амплитудой без обрезки (исходный сигнал) и 100% обрезкой, когда сохраняется только знак (полярность) сигнала возбуждения, приводит к соответствующему увеличению амплитуды механического импульса, несмотря на увеличение амплитуды паразитных механических волн, предшествующих механическому импульсу и следующих за ним.
Полярность определяется, как способность изменять знак амплитуды давления выходного механического импульса на противоположный. Управление типом волны можно определить, как способность формировать более одной формы импульса. Например, может оказаться полезным удлинение только той части формы волны, которая соответствует растяжению, или сложение колебаний для лечения определенного вида окклюзии.
Полярность создаваемого механического импульса может быть изменена на противоположную без необходимости повторной калибровки системы для этого конкретного механического импульса. Несомненно, что для линейной системы (в отличие от нелинейной системы) полярность создаваемого импульса может быть изменена на противоположную путем инвертирования сигналов возбуждения преобразователя, то есть умножения их на (-1).
Формой или временной характеристикой создаваемого механического импульса также можно управлять электронным способом. В одном варианте осуществления система будет хранить в своей памяти наборы сигналов возбуждения для преобразователей, причем каждый набор соответствует уникальной форме импульса. В другом варианте осуществления форма механического импульса может быть изменена путем создания алгебраической комбинации (или нескольких комбинаций) электрических сигналов возбуждения с ними самими и воздействия этой алгебраической комбинации (или нескольких комбинаций) на сам импульс. Рабочий процесс может быть следующим. Первый механический импульс измеряется на дистальном конце передающего элемента. Затем измененная версия (или несколько версий) полученного первого механического импульса строится в цифровой форме, служит в качестве функциональных блоков и суммируется для создания импульса измененной формы. Измененные версии создаются путем задержки и/или умножения (на определенный множитель) первого механического импульса. Наконец, создается эквивалентная версия (или несколько версий) электрического сигнала возбуждения, и их сумма становится новым сигналом возбуждения. Такие составные сигналы возбуждения затем создают импульс измененной формы на дистальном конце передающего элемента.
Для достижения, по меньшей мере, некоторых из указанных выше характеристик может быть использована система 50. Тем не менее, специалисту в данной области техники ясно, что возможны и другие конструкции.
В одном варианте осуществления система 50, показанная на Фиг. 3, позволяет достичь коэффициента усиления, превышающего 100. Коэффициент усиления определяется как максимальное отношение выходного давления системы 50 и одного электромеханического широкополосного преобразователя. Давление обычно измеряется в воде на одинаковом расстоянии на одной и той же поверхности и используют одинаковую форму выходного сигнала для обеих конфигураций. В одном варианте осуществления коэффициент усиления такого порядка способен обеспечить уменьшение входной электрической мощности и/или площади электромеханической излучающей поверхности. Таким образом, стоимость изделий и/или общая площадь, занимаемая устройством, могут быть соответственно уменьшены.
В одном варианте осуществления источники 54-58 являются электромеханическими широкополосными источниками. Таким образом, устройство имеет возможность работать в эхоимпульсном режиме для получения изображения или определения характеристик биологических тканей, расположенных непосредственно перед дистальным концом передающего волновода. Кроме того, электромеханический широкополосный источник может обеспечить соответствующий уровень управления, необходимый для эффективного и безопасного прохождения сосудистой окклюзии.
Ниже представлен конкретный пример осуществления системы 50, показанной на Фиг. 3, в которой использован концентратор 81, показанный на Фиг. 4-6. Использованы девять широкополосных пьезоэлектрических преобразователей, включая четыре преобразователя диаметром 1 дюйм и пять преобразователей диаметром 2 дюйма. Эти преобразователи имеют полосу пропускания 80% (что соответствует коэффициенту Q приблизительно равному 1,25). Восемь преобразователей, т.е. четыре преобразователя диаметром 1 дюйм и четыре преобразователя диаметром 2 дюйма, распределены симметрично на распространяющей поверхности концентратора 81, и один преобразователь диаметром 2 дюйма расположен на усеченной отражающей поверхности концентратора 81. Концентратор 81 имеет следующие размеры: диаметр приблизительно 6,25 дюйма и толщину приблизительно 2 дюймов. Концентратор 81 выполнен из титанового сплава. Фокальная зона расположена в той же плоскости, в которой расположены восемь преобразователей. Концентратор 81 обеспечивает коэффициент усиления, приблизительно равный 4 по сравнению с одним пьезоэлектрическим преобразователем, имеющим тот же размер, что и полезная фокальная зона. Временной концентратор 62 имеет цилиндрическую форму и выполнен из тех же титановых сплавов, что и концентратор 81. Кроме того, концентратор 62 имеет следующие размеры: диаметр приблизительно 0,25 дюйма и длину приблизительно 50 футов. Для ограничения занимаемой площади пространственный концентратор изогнут с радиусом кривизны приблизительно 14 дюймов. Чтобы увеличить коэффициент усиления, геометрия, размер и среда временного концентратора выбраны в соответствии с рабочей длиной волны. Использование преимуществ, обеспечиваемых дисперсионными свойствами временного концентратора 62, обеспечивает коэффициент усиления не менее 15 между входным и выходным концами временного концентратора 62. Для обеспечения оптимальной передачи волн между этими двумя частями, проксимальный конец временного концентратора 62 приварен к фокальной зоне пространственного концентратора 81. На дистальном конце дисперсионного волновода 62 добавлен пространственный концентратор второй ступени. Этот пространственный концентратор имеет форму сужающегося волновода 64, имеющего диаметр проксимального конца приблизительно 0,25 дюйма и диаметр дистального конца приблизительно 0,014 дюйма. Сужающийся волновод 64 имеет длину приблизительно 3 дюйма и выполнен из того же титанового сплава.
Коэффициент усиления, связанный с сужающимся волноводом 64, составляет приблизительно 2. Проксимальный конец концентратора 64 может быть приварен к дистальному концу дисперсионного волновода 62 или разъемно соединен с ним с использованием вышеописанного соединителя. Проксимальный конец 86 удлиненного гибкого передающего волновода 66 прикреплен к дистальному концу концентратора 64. При этом могут быть использованы аналогичные способы крепления, например, сварка, использование съемного соединителя и т.п. Общий коэффициент усиления устройства после концентратора 64 составляет приблизительно 120. Передающий элемент 66 представляет собой электрод из подходящего сплава типа Ti-11,5Mo-6Zr-4,5Sn (титан бета III), имеющий диаметр от приблизительно 0,040 дюймов до приблизительно 0,004 дюйма и длину приблизительно 120 дюймов. Специалисту в данной области техники ясно, что для получения вышеописанных системы и способа прохождения окклюзий с использованием широкополосного источника энергии, создающего и передающего настраиваемые короткие импульсы высокого давления к дистальному концу передающего элемента, можно использовать различную геометрию, конструкцию, элементы, источник энергии, рабочую длину волны, среду распространения и т.п.
В одном варианте осуществления настоящий способ и система позволяют проходить сосудистые окклюзии с использованием широкополосного источника и передающего элемента. Этот способ и система, весьма вероятно, будут более безопасными и эффективными по сравнению с традиционными методами ЧТА. Широкополосный источник энергии, расположенный вне организма пациента, используется для создания механических волн, распространяемых через удлиненный гибкий передающий элемент до места окклюзии сосудов. Импульсное регулируемое излучение механической волны на дистальном конце передающего элемента может вызывать растрескивание, расщепление, эрозию, пробивание и/или разрушение окклюзии. Таким образом, окклюзию легче проходить с применением настоящей системы и способа, а не с использованием традиционных устройств для ЧТА.
В одном варианте осуществления использование широкополосного источника для прохождения сосудистых окклюзий обеспечивает возможность подбора лечения в соответствии со специфическим составом и характеристиками патологического изменения. Подбор индивидуальной схемы лечения может выполняться путем изменения длительности импульса, частоты повторения, величины давления, полярности и/или вида формы сигнала. Регулировка выходного механического импульса может быть выполнена однократно в начале или выполняться оперативно во время процедуры.
В одном варианте осуществления, поскольку источник энергии расположен вне организма пациента, он может использоваться несколько раз без риска заражения. Кроме того, поскольку источник энергии расположен вне организма пациента, он не ограничен по мощности, размеру или геометрии.
В одном варианте осуществления для облегчения доступа, позиционирования и прохождения сосудистой окклюзии может быть использован удлиненный гибкий передающий элемент с традиционными устройствами ЧТА, такими как направляющий проводник, микрокатетер, катетер, баллон с доставкой по проводнику и т.п., или без них. Таким образом, существующая система может быть интегрирована в рабочий процесс стандартных процедур ЧТА.
Несмотря на то, что вышеуказанные способы и системы описаны в медицинском контексте, то есть для прохождения сосудистых окклюзий, следует понимать, что они могут использоваться и для других медицинских или немедицинских применений. Например, способы и системы могут быть использованы для дробления камней в почках, улучшения и усовершенствования доставки химических веществ и лекарств, улучшения механического состояния сосудистых патологических изменений до использования баллона и/или прочистки и реканализации шунтирующего катетера, катетера, микрокатетера, эндоскопа и/или других медицинских трубчатых инструментов. Вышеописанный способ и система также могут быть использованы для размягчения кальцифицированных сердечных клапанов, освобождения электродов кардиостимулятора или другого медицинского устройства, вросшего в кальцифицированную и/или фиброзную ткань. Способы и системы могут также находить применение в других областях медицины. Например, они могут быть использованы для стоматологического и ортопедического сверления, снятия анкеров (болтов, пломб, коронок и т.д.) и/или для очистки поверхности.
Вышеописанные способы и системы для формирования механических импульсов могут находить применение и в других областях, помимо медицины. Например, они могут быть использованы для обработки и формования материалов, например, хрупких материалов, для смешивания и гомогенизации растворов, прочистки труб, сверления отверстий и т.п.
В одном варианте осуществления вышеописанная система 20 может быть использована для получения изображений или определения характеристик объекта, ткани или окружающей области, расположенной перед дистальным концом передающего элемента. Для этого может быть использован широкополосный источник, который может работать как в качестве излучателя, так и в качестве приемника. Для получения изображения объекта сначала механический импульс подается на дистальный конец передающего элемента. После передачи в окружающую среду части механического импульса отражаются и попадают обратно в передающий элемент. Эти отраженные сигналы возвращаются в систему 20 и преобразуются широкополосным источником в электрический сигнал. Для обработки этого сигнала и преобразования его в полезную информацию могут быть выполнены постобработка и анализ. Широкополосный механический источник системы 20 для получения изображения может быть тем же, что и для излучения, или может быть другим. Например, для увеличения пространственного разрешения изображения можно использовать широкополосный механический источник с более высокой центральной частотой (более 10 МГц).
Варианты осуществления изобретения, описанные выше, приведены только в качестве примера. Таким образом, объем настоящего изобретения ограничен исключительно объемом приложенной формулы изобретения.
Реферат
Изобретение относится к средствам создания механических колебаний, применяемым в медицинской технике. Способ формирования механической волны заключается в формировании широкополосного механического импульса большой амплитуды; во введении широкополосного механического импульса большой амплитуды в проксимальный конец недисперсионного цилиндрического передающего элемента; распространении импульса большой амплитуды в недисперсионном цилиндрическом передающем элементе от его проксимального конца до его дистального конца и передаче по импульса на дистальном конце недисперсионного цилиндрического передающего элемента в окружающую среду. Недисперсионный цилиндрический передающий элемент выполнен с возможностью его введения в кровеносный сосуд, и амплитуда механического импульса большой амплитуды при достижении дистального конца недисперсионного цилиндрического передающего элемента составляет от приблизительно 10 МПа до приблизительно 1000 МПа. Технический результат – повышение эффективности лечения окклюзий. 2 н. и 16 з.п. ф-лы, 18 ил.
Комментарии