Усовершенствованное устройство для прохождения окклюзий сосуда и способ его использования - RU2662854C1
Код документа: RU2662854C1
Чертежи


Описание
Область техники
[001] Изобретение относится к энергоэффективному устройству и способу его использования для проникновения через полную окклюзию кровеносного сосуда во время чрескожного коронарного вмешательства или для улучшения доставляющей способности катетера во время чрескожной транслюминальной ангиопластики через частичную окклюзию кровеносного сосуда. В частности, устройство обеспечивает эффективную передачу энергии к дальнему концу устройства посредством силы натяжения для проникновения через окклюзию с минимальными потерями энергии, а также участка дальнего конца, которая сочетает продольную жесткость для эффективного проникновения через окклюзии и осевую гибкость для обеспечения доставляющей способности. Устройство также применимо к подкожным интервенционным процедурам в периферийных артериях.
Уровень техники
[002] Медицинская наука долго искала эффективные способы лечения заболеваний, включающих стеноз (сужение или обструкцию) просвета артерии. Это заболевание, вообще известное как окклюзия, встречается у пациентов, страдающих от атеросклероза, характеризующегося накоплением волокнистой, жировой или кальцинированной ткани в артериях, иначе известной как атерома или бляшки. Окклюзия может быть частичной или полной; она может быть мягкой и гибкой или твердой и кальцинированной. Окклюзии способны возникать в большом разнообразии мест артериальной системы, включая аорту, коронарные и каротидные артерии и периферийные артерии. Окклюзия может приводить к артериальной гипертензии, ишемии, стенокардии, инфаркту миокарда, инсульту и даже смерти.
[003] Минимально инвазивные процедуры представляют собой предпочтительный способ лечения артериальных окклюзий. В этих процедурах катетер (длинное, очень гибкое трубчатое устройство) вводят в большую артерию через малую артериальную пункцию, выполненную в паху, плече, бедре или шее. Катетер продвигают вперед и направляют к местонахождению стеноза. Большое разнообразие устройств было разработано для лечения стенозированных артерий, причем эти устройства размещают на дальнем конце катетера и, таким образом, доставляют. В качестве примера процедуры включают чрескожную транслюминальную коронарную ангиопластику, прицельную коронарную атерэктомию и стентирование.
[004] При полной окклюзии сначала должен быть открыт проход через окклюзию, обеспечивающий возможность размещения катетера с баллоном/стентом в целевом стенозированном сегменте сосуда. Поскольку морфология окклюзии сложна и различна при переходе от пациента к пациенту, общепринятые способы и устройства для открытия этих окклюзий имели ограниченный успех и требуют длительных процедур с потенциально отрицательными воздействиями на пациента. Такие отрицательные воздействия включают перфорацию стенки кровеносного сосуда, высокую дозу облучения или повреждения почек вследствие широкого применения ангиографического контрастного вещества.
[005] Стенозы, или окклюзии, состоят из разных материалов - от более мягких жировых веществ, таких как холестерол, до более жестких волокнистых материалов и до твердого кальцинированного материала. Обычно концы окклюзии - ближняя и дальняя крышки - содержат более твердый кальцинированный материал. Через более твердые материалы труднее проникать, что требует существенного количества энергии, а более мягкие материалы требуют меньшего количества энергии. Поэтому открытие окклюзии требует передачи относительно большого количества энергии к дальнему концу катетера или к направляющей проволоке, особенно при наличии кальцинирования.
[006] Окклюзии содержат множество материалов различной плотности и твердости. Поэтому природа энергии, используемой в устройстве восстановления просвета, должна соответствовать конкретной окклюзии, и этим проникновением следует управлять для предотвращения перфорирования стенок артерии или повреждения здоровой ткани. Кроме того, поскольку энергия возникает на ближнем конце катетера, она должна быть в состоянии достигать дальнего конца устройства около окклюзии на уровне, достаточном для выполнения проникновения через окклюзию без повреждения проводящей проволоки и без потери гибкости устройства. Известные устройства имеют недостатки, касающиеся недостаточного количества энергии, переносимой к дальнему концу устройства, или рассогласования между типом поставляемой энергии и типом окклюзии, что иногда приводит к слишком большой величине прилагаемого усилия, что увеличивает, таким образом, риск повреждения или даже перфорации стенки просвета. Соответственно, существует необходимость в системе или устройстве, которые способны передавать соответствующую энергию устройству для восстановления просвета.
[007] В эндолюминальных устройствах, разработанных для проникновения через окклюзии сосуда, механическое перемещение, то есть колебание, элемента, контактирующего с окклюзией, обычно вырабатывают посредством размещения источника энергии на ближнем конце устройства и передачи энергии к дальнему концу устройства механическими средствами. Некоторые доступные способы открытия полных окклюзий представляют собой использование радиочастотной абляционной энергии (например, используемую в системе, продаваемой компанией Intralumenal Therapeutics под названием Safecross™), колебательной энергии с частотой примерно 20 кГц и малыми амплитудами (например, используемую в системе, продаваемой компанией FlowCardia Inc. под названием Crosser™), специализированной жесткой направляющей проволоки, которая проталкивает проход через окклюзию (разработанной компанией Asahi Intec Со. и продаваемой как направляющая проволока под названиями Confianza 9g/Conquest и Miracle 12g), и элементов механической вибрации, работающих на высокой частоте (элемент Crosser™ компании FlowCardia Inc.). Все такие устройства обеспечивают ограниченный показатель эффективности в диапазоне 40-70%.
[008] Средства механической вибрации для открытия окклюзий имеют недостатки, касающиеся значительных потерь энергии между источником энергии на ближнем конце катетера и сверлильным приспособлением, размещенным на дальнем конце катетера, а также ограниченного срока службы вследствие усталости материалов.
[009] При использовании ультразвукового катетера ультразвуковая энергия обычно поступает от ультразвукового преобразователя на ближнем конце катетера, и затем ее передают к дальней головке катетера в виде примерно синусоидальной волны, заставляя дальнюю головку вибрировать и отсекать или разрушать целевую окклюзию. Для достижения мест обработки такие катетеры должны быть довольно длинными - примерно 90-150 см или больше, - и поэтому большое количество энергии должно быть первоначально введено для достижения дальнего конца. В то же самое время для достижения достаточной гибкости при прохождении через очень извилистые сосуды катетер должен быть разумно тонким. Большая длина и малый диаметр совместно делают поломку проволоки обычной проблемой вследствие силы натяжения и износа от высокоэнергетических импульсов.
[010] Направляющие проволоки, достаточно жесткие для проникновения через твердые окклюзии, обладают тем недостатком, что их негибкость и прямые кончики делают затруднительным проведение через извилистые сосуды и увеличивают риск перфорации сосуда. Жесткие материалы, достаточно гибкие для приспособления к очень извилистым сосудам, имеют проблему продольного изгиба, вследствие размещения источника проталкивания на ближнем конце. При использовании твердого материала продольный изгиб приводит к потере энергии посредством передачи к поперечным силам и трению в отверстии просвета. Например, в одном известном из уровня техники устройстве (а именно, Crosser™ компании FlowCardia Inc.) использована жесткая нитиноловая проволока. Жесткость проволоки обеспечивает возможность передачи осевого усилия, инициируемого на ближнем конце проволоки, к дальнему концу проволоки посредством нажатия на проволоку. Однако, такие способы передачи энергии страдают от значительных, но все же непредсказуемых (то есть переменных) потерь энергии вследствие передачи энергии к помещающей трубке (например, полости катетера). Это представляет собой особую проблему, когда жесткая проволока сгибается для соответствия анатомическим особенностям кровеносного сосуда. Потери энергии жесткой проволоки происходят, главным образом, вследствие двух механизмов:
(1) Момента инерции, который может быть иллюстрирован посредством сгибания жесткого тела. Сила, приложенная для сгиба жесткой проволоки, передается трению, когда жесткая проволока размещена внутри полости катетера.
(2) Продольный изгиб проволоки представляет собой ситуацию, которая вызывает смещение осевого усилия к поперечным силам и приводит к увеличенным силам трения внутри размещающей полости. Далее, при увеличении осевого усилия для компенсации энергетических потерь происходит усиление продольного изгиба, что делает еще более затруднительным достижение осевых колебаний и, в частности, управляемых осевых колебаний.
[011] Важное техническое явление представляет собой продольный изгиб гибкой балки под нагрузкой. Критическое усилие, необходимое для изгиба гибкой балки (включая, например, жесткую проволоку), задано Уравнением 1:

где Fc - максимальное усилие, которое жесткая проволока может выдерживать без продольного изгиба, L - длина жесткой проволоки, а K представляет собой числовую константу, зависящую от способа поддержки жесткой проволоки на ее концах. Например, при шарнирном закреплении (то есть с возможностью поворота) обоих концов, константа K=1. При шарнирном закреплении одного конца и жестком закреплении другого конца константа K=0,7. Если на прямую проволоку, удерживаемую на своем дальнем конце, нажимают на ее ближнем конце с силой, превышающей критическое усилие продольного изгиба Fc, то жесткая проволока будет претерпевать боковой изгиб и не будет передавать силу проталкивания вперед.
[012] Намотка из жесткой проволоки внутри полости катетера - в частности, катетера, проходящего через извилистый кровеносный сосуд - будет согнута. Даже в отсутствии натяжения или нажима на такую жесткую проволоку имеют место силы, прикладываемые к жесткой проволоке для удержания ее согнутой. Трение, образуемое изогнутой проволокой относительно внутриполостной поверхности катетера, вынуждает жесткую проволоку быть шарнирно закрепленной в некоторой точке. При превышении трением в этой точке закрепления порогового значения продольного изгиба, продольный изгиб будет иметь место и будет оказывать негативное воздействие на способность проволоки к проталкиванию. Сопротивление, которое жесткая проволока встречает в окклюзии сосуда, работает тем же образом, что и шарнирно закрепленная точка вследствие трения при изгибе. Жесткая проволока в трубке, например, в катетере, будет выполнять перемещение только при величине силы проталкивания, превышающей силу трения или сопротивления, действующую на жесткую проволоку. Однако, при достаточно большой длине прямолинейной части жесткой проволоки, предшествующей точке сопротивления, жесткая проволока будет согнута в продольном направлении еще до того, как сила проталкивания станет достаточно большой для преодоления трения. Это объясняет, почему трудно передавать усилие к одному концу навитой жесткой проволоки посредством нажатия на противоположный конец, поскольку жесткая проволока предположительно будет согнута.
[013] Поэтому, в известном уровне техники существует необходимость в устройстве для проникновения через окклюзии сосуда, которое может обеспечить доставку эффективной энергии управляемым и безопасным образом для открытия окклюзий сосудов и улучшения доставляющей способности катетеров, несущих такие устройства через кровеносные сосуды. В известном уровне техники существует также потребность в энергоэффективном устройстве для проникновения через окклюзии сосудов, которое содержит направляющую кромку или дальний участок для выполнения вибрации, которые являются достаточно жесткими в продольном направлении для работы в качестве сверлильной головки для проникновения через кальцинированные поражения в месте обработки, но обладают также достаточной осевой гибкостью для реализации доставляющей способности через извилистые сосуды и узкие и стенозированные сосуды. Также существует необходимость в системе, которая способна как передавать соответствующую энергию, так и регулировать значение энергии, передаваемой к проникающему концу устройства в зависимости от твердости окклюзии.
Раскрытие сущности изобретения
[014] Настоящее изобретение предусматривает создание устройства для восстановления просвета полной или частичной окклюзии в просвета тела, такой как кровеносный сосуд. Устройство согласно настоящему изобретению содержит оконечность катетера с ближним участком, представляющим собой пружинный элемент, и дальним участком, представляющим собой сверлильный компонент, или сверлильную головку. Часть устройства, непосредственно воздействующая на окклюзию, выполнена с возможностью вибрации; этот выполненный с возможностью вибрации элемент представляет собой сверлильный компонент. Пружинный элемент обладает открытой навивкой (с промежутками между витками), а сверлильный компонент представляет собой проволочную спираль или пружину с закрытыми витками (соседние витки контактируют друг с другом). Например, пружинный элемент может содержать по меньшей мере два соседних витка с открытой навивкой. Это новое двойное размещение обеспечивает сверлильную головку на дальнем конце оконечности катетера, который имеет и сочетает достаточную продольную жесткость для сверления с хорошей осевой (боковой) гибкостью для улучшения доставляющей способности и проходимости оконечности катетера и самого катетера, и механизм для обеспечения колебаний сверлильного компонента, что устраняет имеющую место в уровне техники проблему потери механической энергии между внешним источником энергии и дальней точкой колебаний.
[015] В частности, устройство по настоящему изобретению содержит пружинный элемент, элемент натяжения, выполненный с возможностью вибрации сверлильный компонент, причем все они размещены в катетере. Сверлильный компонент, или сверлильная головка, размещен на дальней оконечности устройства и выполнен с возможностью осцилляции (колебаний) в ответ на усилие натяжения элемента натяжения и возвратное усилие пружинного элемента после высвобождения элемента натяжения. Колебание или вибрация сверлильного компонента могут обеспечить проникновение через окклюзию.
[016] Сверлильный компонент представляет собой плотно намотанную пружину (спираль с закрытыми витками), то есть соседние витки контактируют друг с другом. Например, сверлильный компонент может содержать по меньшей мере два соседних плотно сжатых витка. При использовании здесь термин "закрытые витки" используют взаимозаменяемо с "плотно сжатыми витками" и "плотной намоткой". Конструкция закрытых витков сверлильного компонента согласно настоящему изобретению обладает преимуществом продольной жесткости, что может содействовать способности к проталкиванию, как у твердотельной сверлильной головки, но также и гибкостью вдоль ее оси, которую не имеет твердотельная сверлильная головка. В предпочтительном варианте реализации спиральный сверлильный компонент сужается по направлению к дальнему концу для уменьшения поперечного профиля и увеличения доставляющей способности. Согласно одной особенности этого варианта реализации сверлильный компонент имеет внешний диаметр, сужающийся в направлении к дальнему концу, то есть имеет место уменьшение диаметра при продвижении от ближнего конца к дальнему концу, и внутренний диаметр (диаметр просвета), постоянный от ближнего до дальнего конца или сужающийся с меньшей конусностью, чем внешний диаметр.
[017] Устройство по настоящему изобретению предпочтительно содержит источник колебательной энергии, размещенный вне катетера и функционально соединенный с элементом натяжения, выполняющим свободное перемещение относительно катетера. Источник колебательной энергии выполнен с возможностью многократного натяжения и высвобождения элемента натяжения для обеспечения вибрации сверлильного компонента через пружинный элемент.
[018] Устройство может дополнительно содержать устройство, закрепляющее катетер относительно кровеносного сосуда для улучшения передачи сил вибрации к окклюзии. Устройство может также содержать направляющее приспособление, содействующее перемещению через окклюзию, особенно для использования в случаях наличия многочисленных разветвлений около целевой окклюзии. Катетер может быть совместим для использования с дополнительными внешними или внутренними компонентами, содействующими визуализации устройства или приспособления и/или удаляющими сверлильные отходы, например, посредством всасывания.
[019] Система по настоящему изобретению содержит устройство по настоящему изобретению, включая источник колебательной энергии, и блок управления, выполненный с возможностью управления источником колебательной энергии. Источник колебательной энергии вырабатывает усилие вибрации, имеющее по меньшей мере одну частоту и по меньшей мере одну амплитуду, а блок управления выполнен с возможностью независимого регулирования частоты и амплитуды колебаний в источнике колебательной энергии и, таким образом, в сверлильном компоненте. Соответствующая сила вибрации может быть достигнута посредством регулировки частоты, например, от нескольких герц до нескольких сотен герц, и/или посредством регулировки амплитуды натяжения, так что сила проникновения при вибрации минимизирована и соответствует морфологии и твердости окклюзии. Поэтому блок управления может регулировать источник колебательной энергии для выработки силы вибрации, соответствующей морфологии и твердости окклюзии.
[020] Считается, что посредством подачи минимальной силы, необходимой для проникновения через окклюзию, возрастает безопасность процедуры восстановления просвета и потенциальное повреждение просвета тела, например, артерии, уменьшается по сравнению с устройствами для восстановления просвета известного уровня техники. Соответственно, частота и/или амплитуда колебаний сверлильного компонента могут быть изменены вручную врачом-оператором для приспособления к твердости конкретной окклюзии, обрабатываемой на основании навыков и опыта оператора. В качестве альтернативы частота и амплитуда колебаний могут быть отрегулированы автоматически или вручную на основании измерений твердости окклюзии.
[021] В месте измерения твердости окклюзии устройство согласно настоящему изобретению может содержать датчик или тензодатчик. При необходимости система по настоящему изобретению дополнительно содержит блок интерфейса оператора для оказания содействия оператору при управлении частотой и амплитудой колебаний сверлильного компонента на основании обратной связи от датчика относительно твердости окклюзии и/или значения Δy (расширения) для элемента пружины сжатия. Блок управления регулирует частоту и/или амплитуду, с которой источник колебательной энергии натягивает элемент натяжения и может быть, например, выполнен в виде переключателя, процессора или процессора с блоком интерфейса оператора.
[022] Система может дополнительно содержать механизм для управления натяжением с целью компенсации изменений длины траектории элемента натяжения в искривленных или извилистых просветах. Механизм для управления натяжением может регулировать длину элемента натяжения или амплитуду, с которой элемент натяжения натягивают.
[023] Настоящее изобретение далее охватывает способ выполнения колебаний сверлильного компонента, способ использования устройства или системы для восстановления просвета окклюзированной полости тела, такой как кровеносный сосуд, и способ управления усилием вибрации в устройстве. Результат представляет собой универсальные и эффективные устройство подачи энергии, систему и способ для проникновения через полную окклюзию и/или для улучшения доставляющей способности катетера через частично окклюзированные полости тела.
[024] Задача настоящего изобретения состоит в создании усовершенствованного устройства для проникновения через окклюзию сосуда и/или прохождения через частичную окклюзию, причем устройство содержит выполненный с возможностью вибрации элемент, вибрацией которого управляют улучшенным образом, а именно, посредством более эффективной передачи энергии от внешнего источника энергии к дальней части катетера. Увеличенная эффективность возникает вследствие наличия комбинации проволоки натяжения / пружины устройства. В частности, устройство вырабатывает усилие вибрации, которое колеблет выполненный с возможностью вибрации элемент посредством силы натяжения вместо силы проталкивания или комбинированной силы натяжения-проталкивания. Устройство согласно настоящему изобретению менее чувствительно к непредсказуемой геометрии, такой как имеющей иногда место извилистое искривление кровеносных сосудов, чем устройства для чрескожного коронарного вмешательства, использующие силы проталкивания.
[025] Другая задача настоящего изобретения состоит в предложении такого энергоэффективного устройства, которое содержит в качестве вибрационного элемента сверлильный компонент, имеющий комбинированные свойства гибкости для прохождения через затруднительные строения сосудов и соответствующую продольную жесткость для сверления через кальцинированные поражения сосудов.
[026] Еще одна задача настоящего изобретения состоит в предложении сверлильного компонента, сужающегося к дальнему концу.
[027] Еще одна задача настоящего изобретения состоит в предложении системы, содержащей устройство с усилием натяжения для проникновения через окклюзию сосуда, которое выполнено с возможностью регулировки частоты или амплитуды колебаний для приспособления к твердости окклюзии или к растяжению элемента натяжения.
Описание чертежей
[028] На фиг. 1А-1Е показан один возможный способ работы варианта реализации устройства по настоящему изобретению во время одного цикла натяжения. На фиг. 1А показано устройство без приложенной к нему силы натяжения. На фиг. 1B показано устройство с силой натяжения в элементе натяжения и с пружинным элементом, сжатом нагрузкой (запасенная энергия). Запасенная энергия равна коэффициенту (k) упругости пружины, умноженному на амплитуду (x) сжатия. На фиг. 1С показано устройство при отсутствии силы натяжения в высвобожденном элементе натяжения и высвобождении кинетической энергии из пружины сжатия. На фиг. 1D показано устройство при отсутствии силы натяжения в элементе натяжения, и с пружиной сжатия при максимальном расширении (yx) для амплитуды (x) сжатия. На фиг. 1Е снова показано устройство с силой натяжения, приложенной к элементу натяжения.
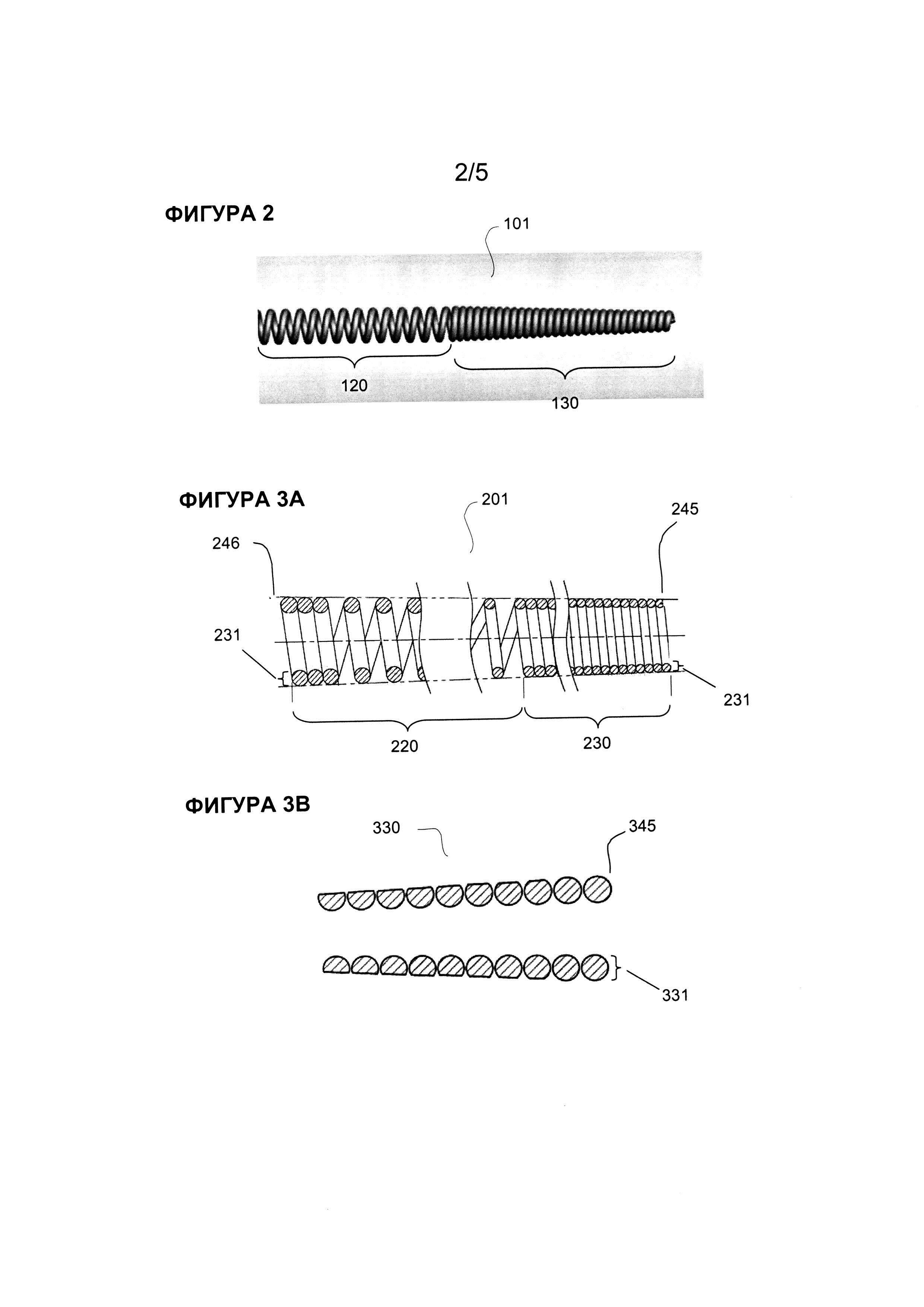
[029] На фиг. 2 показан пружинный элемент и сверлильный компонент оконечности катетера согласно настоящему изобретению.
[030] На фиг. 3A показан вид в разрезе варианта реализации оконечности катетера согласно настоящему изобретению, который представляет собой проволочную спираль с суженным внешним диаметром и постоянным диаметром просвета, причем проволочная спираль содержит пружинный элемент с разнесенными витками и сверлильный компонент с плотно примыкающими друг к другу витками.
[031] На фиг. 3B показан вид в разрезе варианта реализации конического сверлильного компонента с постоянным диаметром просвета.
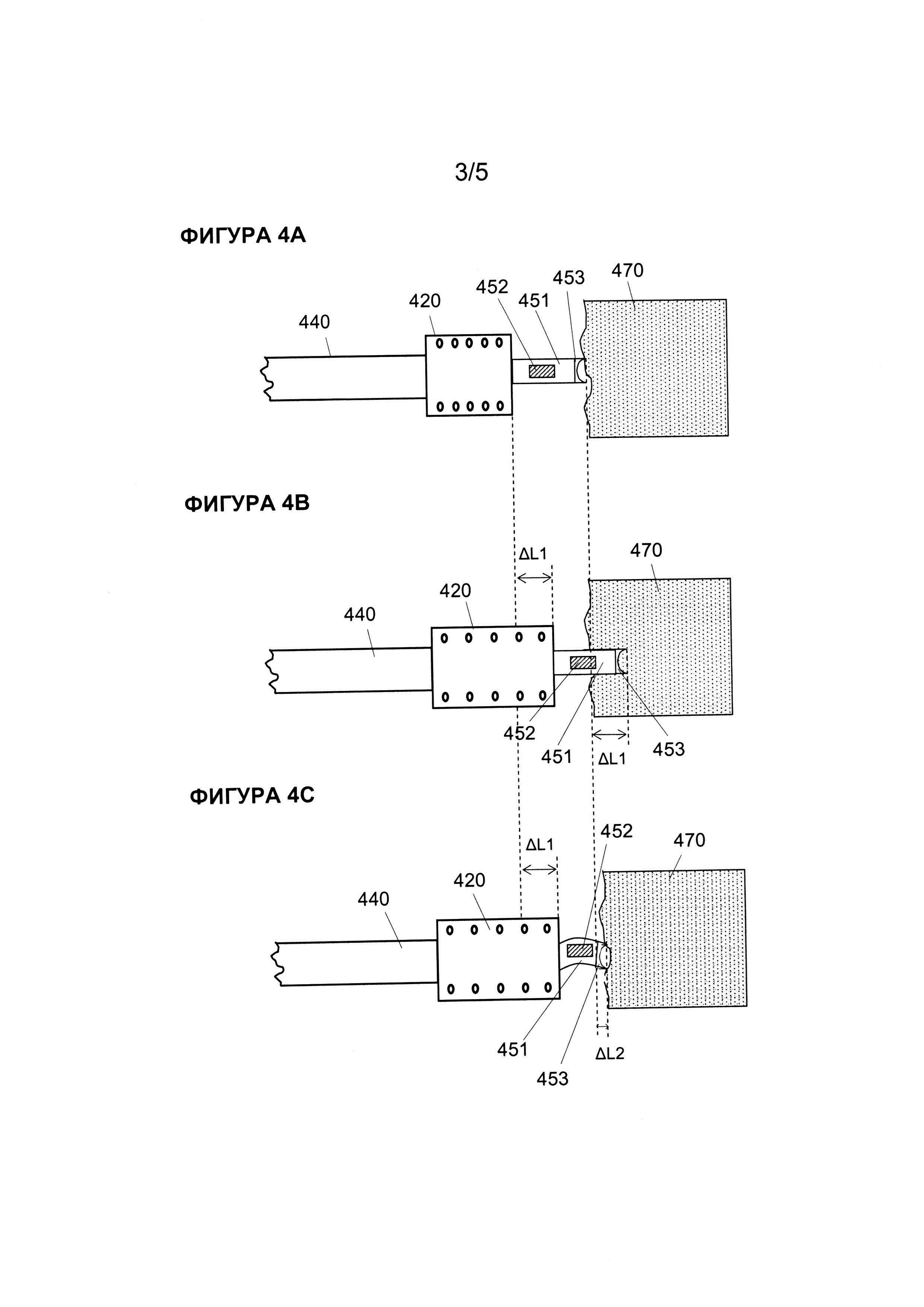
[032] На фиг. 4А-4С схематически показана совокупность диаграмм, изображающих компоненты датчика ткани согласно настоящему изобретению и поясняющих, как вариант реализации датчика ткани, прикрепленного к пружинному элементу, может быть использован для определения того, приложено ли соответствующее усилие к окклюзиям различной твердости.
[033] На фиг. 5 схематично показано, как вариант реализации датчика может быть использован для непосредственного измерения достигнутой амплитуды колебаний сверлильного компонента.
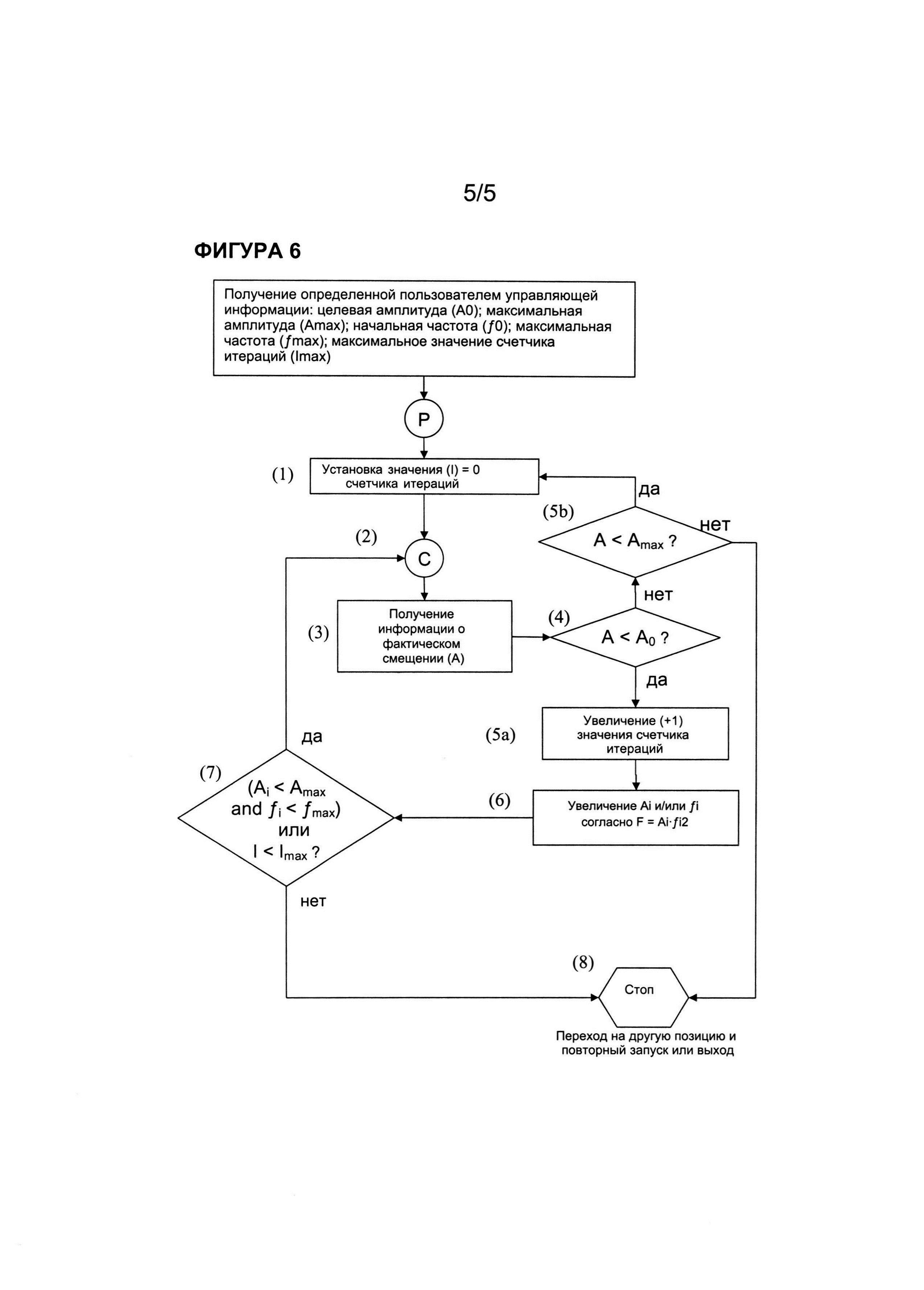
[034] На фиг. 6 показан один вариант реализации схемы управления для регулировки усилия вибрации.
Осуществление изобретения
[035] Устройство, система и способ согласно настоящему изобретению предлагают усовершенствованное устройство и способ для обеспечения колебаний сверлильного компонента с целью восстановления просвета в полной или частичной окклюзии кровеносного сосуда, но могут также быть использованы для вычищения окклюзий из других полостей тела. Устройство согласно настоящему изобретению содержит пружинный элемент и сверлильный компонент на дальнем конце катетера, то есть на оконечности катетера, и элемент натяжения, прикрепленный к пружинному элементу или сверлильному компоненту и размещенный в катетере. Устройство обеспечивает терапевтическую вибрацию в сверлильном компоненте на дальнем конце катетера, то есть на оконечности катетера. Выполненный с возможностью вибрации сверлильный компонент функционально прикреплен к дальнему концу пружинного элемента. Вибрация сверлильного компонента реализована через пружинный элемент посредством натяжения и высвобождения элемента натяжения.
[036] Более подробно, натянутый элемент натяжения, который может быть прикреплен или к пружинному элементу или к сверлильному компоненту, может сжимать пружинный элемент в направлении к ближнему концу и, таким образом, передавать потенциальную энергию сверлильному компоненту. После снятия усилия натяжения с элемента натяжения пружинный элемент преобразует запасенную энергию в кинетическую энергию локальным образом, перемещая, таким образом, сверлильный компонент в направлении к дальнему концу. Увеличение кинетической энергии может вызывать расширение пружинного элемента, что вытягивает дальний конец пружинного элемента за пределы его положения при отсутствии нагрузки (положения покоя), толкая, таким образом, сверлильный компонент дальше в направлении к дальнему концу. В кровеносном сосуде с окклюзией происходит перенос кинетической энергии от сверлильного компонента для воздействия на окклюзию. Сверлильный компонент, размещенный в самой дальней части оконечности катетера, тем самым, заставляют выполнять колебания с частотой и амплитудой, достаточными для проникновения через окклюзию в полости тела.
[037] Сверлильный компонент содержит плотно намотанную (плотно сжатую или с "закрытыми витками") конфигурацию проволоки. Плотно намотанная конфигурация проволоки в сверлильном компоненте обеспечивает осевую гибкость (то есть сверлильный компонент может быть согнут в сторону), а также продольную жесткость или способность к проталкиванию, например, для выполнения сверления через окклюзию.
[038] Катетер может быть обычным оперативным медицинским катетером, с полостью для размещения элемента натяжения и, предпочтительно, также с просветом для размещения направляющей проволоки и других элементов, например, для направления перемещения, элемента измерения перемещения, для инфузии контрастного вещества или для удаления остатков окклюзии из области сверления.
[039] Таким образом, устройство согласно настоящему изобретению содержит катетер, имеющий ближний конец и дальний конец; пружинный элемент, имеющий ближний конец и дальний конец, причем указанный ближний конец указанного пружинного элемента прикреплен к указанному дальнему концу указанного катетера, а указанный пружинный элемент содержит по меньшей мере два соседних витка с открытой навивкой; сверлильный компонент, прилегающий к указанному дальнему концу указанного пружинного элемента и функционально присоединенный к нему, причем указанный сверлильный компонент содержит пружину, имеющую по меньшей мере два плотно сжатых соседних витка; и элемент натяжения, размещенный внутри указанного катетера, причем указанный элемент натяжения содержит ближний конец и дальний конец, а указанный дальний конец указанного элемента натяжения прикреплен к дальней структуре, выбранной из группы, состоящей из указанного пружинного элемента и указанного сверлильного компонента; причем указанный элемент натяжения, при его натяжении и высвобождении, сжимает и высвобождает указанный пружинный элемент, вызывая, таким образом, по меньшей мере одно колебание указанного сверлильного компонента. Устройство может дополнительно содержать источник колебательной энергии, функционально связанный с указанным ближним концом указанного элемента натяжения, причем указанный источник колебательной энергии выполнен с возможностью вызывать колебания указанного сверлильного компонента посредством многократного натяжения и высвобождения указанного элемента натяжения.
[040] Устройство может быть альтернативно описано как содержащее катетер, имеющий ближний конец, дальний конец и оконечность катетера на указанном дальнем конце указанного катетера; элемент натяжения, размещенный внутри указанного катетера, причем указанный элемент натяжения имеет ближний конец и дальний конец, а указанный дальний конец указанного элемента натяжения прикреплен к структуре на указанной оконечности катетера; и источник колебательной энергии, функционально соединенный с указанным ближним концом указанного элемента натяжения, причем указанный источник колебательной энергии выполнен с возможностью вызывать (генерировать) по меньшей мере одно колебание в указанном сверлильном компоненте через указанный элемент натяжения и указанный пружинный элемент; причем указанная оконечность катетера содержит пружинный элемент и сверлильный компонент; а указанный пружинный элемент имеет ближний конец и дальний конец, причем указанный ближний конец указанного пружинного элемента прикреплен к указанному дальнему концу указанного катетера, а указанный пружинный элемент содержит открытые витки; указанный сверлильный компонент имеет ближний конец и дальний конец, причем указанный ближний конец указанного сверлильного компонента прикреплен с указанному дальнему концу указанного пружинного элемента, а указанный сверлильный компонент состоит из плотно намотанной проволоки.
[041] В одном варианте реализации настоящего изобретения сверлильный компонент сужен к дальнему концу. Согласно одной особенности этого варианта реализации пружинный элемент сужен к дальнему концу. В другом варианте реализации настоящего изобретения сверлильный компонент имеет внешний диаметр, сужающийся к дальнему концу, и диаметр внутреннего просвета, который по существу постоянен, то есть постоянен или почти постоянен. Согласно одной особенности этого варианта реализации пружинный элемент также имеет внешний диаметр, сужающийся к дальнему концу, и диаметр внутреннего просвета, который по существу постоянен, то есть постоянен или почти постоянен. В еще одном варианте реализации настоящего изобретения сверлильный компонент имеет внешний диаметр, сужающийся к дальнему концу с первой конусностью, и диаметр внутреннего просвета, сужающийся со второй конусностью, причем указанная вторая конусность меньше указанной первой конусности. Согласно одной особенности этого варианта реализации пружинный элемент также имеет внешний диаметр, сужающийся к дальнему концу с первой конусностью, и диаметр внутреннего просвета, сужающийся со второй конусностью, причем указанная вторая конусность меньше указанной первой конусности.
[042] В одном варианте реализации настоящего изобретения структура оконечности катетера, к которому прикреплен элемент натяжения, представляет собой сверлильный компонент. В другом варианте реализации настоящего изобретения пружинный элемент представляет собой пружину сжатия, а указанный элемент натяжения прикреплен к указанному дальнему концу указанного пружинного элемента. Что касается вариантов реализации, в которых элемент натяжения прикреплен к пружинному элементу, элемент натяжения может быть прикреплен в любой точке вдоль пружины. Например, элемент натяжения может быть прикреплен в ближней точке конической области, дальней точке конической области, или в любой точке между дальним концом пружинного элемента и точкой на пружинном элементе, дальней от катетера, к которому он прикреплен.
[043] Система по настоящему изобретению содержит устройство согласно настоящему изобретению, включая источник колебательной энергии, и блок управления для управления источником колебательной энергии. Блок управления может также управлять или независимо регулировать по меньшей мере одну частоту и по меньшей мере одну амплитуду колебаний. Система может дополнительно содержать датчик для содействия управлению частотой или амплитудой и процессор, функционально связанный с указанным датчиком и функционально связанный с указанным блоком управления, причем процессор выполнен с возможностью анализа входного сигнала отдатчика. Блок управления может дополнительно содержать блок интерфейса оператора (то есть пользовательское устройство ввода-вывода). Система может еще дополнительно содержать механизм для управления (или регулирования) натяжения, выполненный с возможностью компенсации изменений длины траектории элемента натяжения при наличии искривлений катетера, то есть при наличии искривлений катетера вследствие искривлений сосуда.
[044] Изобретение дополнительно предусматривает способ обеспечения колебаний сверлильного компонента на оконечности катетера и способ прохождения через окклюзию сосуда посредством использования устройства, например, для восстановления просвета окклюзии. Также предложен способ управления силой вибрации.
[045] Способ выполнения колебаний сверлильного компонента на оконечности катетера состоит в том, что оконечность катетера содержит сжимаемый пружинный элемент, имеющий ближний конец и дальний конец, причем указанный ближний конец указанного пружинного элемента прикреплен к указанному дальнему концу указанного катетера; гибкий в осевом направлении сверлильный компонент, прилегающий к указанному дальнему концу указанного пружинного элемента, причем указанный сверлильный компонент состоит из плотно сжатой спиральной пружины; элемент натяжения, размещенный внутри указанного катетера, причем указанный элемент натяжения имеет ближний конец и дальний конец, и указанный дальний конец указанного элемента натяжения прикреплен к дальней структуре на оконечности катетера. Дальняя структура может быть выбрана из группы, состоящей из указанного пружинного элемента и указанного сверлильного компонента. Способ приведения в колебание сверлильного компонента включает натяжение элемента натяжения от ближнего конца указанного элемента натяжения для генерации нагрузки, сжимающей дальний конец пружинного элемента по направлению к ближнему концу указанного пружинного элемента, причем указанный элемент натяжения прикреплен на дальнем конце к указанному дальнему концу указанного пружинного элемента, причем указанный сверлильный компонент функционально присоединен к указанному дальнему концу указанного пружинного элемента; снятие указанной нагрузки, вырабатываемой указанным элементом натяжения, и обеспечение, таким образом, возможности расширения указанного пружинного элемента; повторение указанных операций натяжения и высвобождения для обеспечения колебаний указанного сверлильного компонента. При выполнении дальней структуры, к которой прикреплен элемент натяжения, в виде пружинного элемента, элемент натяжения может быть прикреплен в любой точке вдоль пружинного элемента, что обеспечивает возможность прикладывания нагрузки на пружинный элемент посредством натяжения элемента натяжения. Таким образом, в другом варианте реализации настоящего изобретения указанный дальний конец указанного элемента натяжения присоединен к ближней точке конической области указанного пружинного элемента. В еще одном варианте реализации настоящего изобретения указанный дальний конец указанного элемента натяжения присоединен к дальней точке конической области указанного пружинного элемента. В каждом из этих альтернативных вариантов реализации настоящего изобретения натяжение указанного элемента натяжения создает нагрузку на указанный пружинный элемент посредством сжатия указанного пружинного элемента, а высвобождение указанного элемента натяжения снимает указанную нагрузку для реализации колебания указанного сверлильного компонента.
[046] В одном варианте реализации настоящего изобретения натяжение и высвобождение выполняется источником колебательной энергии. Согласно одной особенности этого варианта реализации колебание имеет по меньшей мере одну частоту и по меньшей мере одну амплитуду, и указанной по меньшей мере одной частотой управляет блок управления, функционально присоединенный к указанному источнику колебательной энергии. Согласно другой особенности этого варианта реализации колебание имеет по меньшей мере одну частоту и по меньшей мере одну амплитуду, и указанной по меньшей мере одной амплитудой управляет блок управления, функционально присоединенный к указанному источнику колебательной энергии. Согласно еще одной особенности этого варианта реализации колебание имеет по меньшей мере одну частоту и по меньшей мере одну амплитуду, и указанной по меньшей мере одной частотой и указанной по меньшей мере одной амплитудой управляет блок управления, функционально присоединенный к указанному источнику колебательной энергии.
[047] Способ прохождения катетером через окклюзию сосуда включает введение в сосуд описанного выше устройства; размещение указанного сверлильного компонента в контакте с указанной окклюзией; и генерацию последовательности усилий натяжения от указанного источника колебательной энергии, воздействующих на указанный элемент натяжения, для вызывания колебаний указанного сверлильного компонента с амплитудой и частотой, достаточными для проникновения через указанную окклюзию. Способ может дополнительно включать продвижение указанного катетера через указанную окклюзию по мере того, как указанный сверлильный компонент проникает через указанную окклюзию. В ходе шага генерации способ может дополнительно включать обеспечение колебаний указанного сверлильного компонента с амплитудой и частотой, достаточными для маневрирования указанного катетера вокруг препятствий в указанном сосуде.
[048] Конфигурация плотно намотанной проволоки для сверлильного компонента обеспечивает улучшенную маневренность оконечности катетера через, например, извилистые сосуды по сравнению со сверлильной головкой, имеющей твердотельную жесткую структуру. В дополнение к гибкости в осевом направлении плотно сжатые витки обеспечивают сверлильному компоненту способность к проталкиванию и жесткость на дальнем конце, в особенности на дальней кромке. В предпочтительном варианте реализации настоящего изобретения сверлильный компонент сужается к дальнему концу. Например, согласно одной особенности этого варианта реализации сверлильный компонент может иметь внешний диаметр, сужающийся от ближнего конца к дальнему концу. При этой особенности просвет сверлильного компонента может иметь постоянный диаметр или может быть сужен к дальнему концу в меньшей степени, чем внешний или наружный диаметр. Витки сверлильного компонента могут быть выполнены из металла, твердой пластмассы или из других подходящих материалов. Соответствующие металлические материалы для сверлильного компонента включают, например, нержавеющую сталь, кобальтохромовый сплав, нитинол или другие соответствующие металлы, которые очевидны для специалиста в данной области техники на основании приведенного здесь описания.
[049] Пружинный элемент может быть, например, пружиной сжатия, витой пружиной (например, проволокой в форме спирали), листовой пружиной, гофрированной мембраной, сжимаемым полимером, пружиной с покрытием или аналогичным элементом, подходящим для запасания потенциальной энергии после сжатия и высвобождения кинетической энергии при снятии сжимающей нагрузки. Сжатие и расширение пружинного элемента могут быть использованы для приведения в колебание сверлильного компонента с частотой и амплитудой, достаточными для проникновения через окклюзию сосуда.
[050] Сверлильный компонент и пружинный элемент могут представлять собой различные участки одной пружины из намотанной проволоки, причем дальний участок состоит из закрытых витков, а ближний участок состоит из открытых витков.
[051] Элемент натяжения предпочтительно выполнен в виде гибкой струны. Любой полимер с высокой степенью растяжения представляет собой подходящий материал для элемента натяжения. Неограничивающие примеры соответствующих материалов включают углерод, DSM Dyneema® или Dyneema Purity® (поставляемые компанией DSM, Хеерлен, Нидерланды), или другие соответствующие полимеры, такие как полиэтилен или полиэфир.
[052] Источник колебательной энергии может быть любым источником энергии, выполненным с возможностью генерации по меньшей мере одного импульса колебательной энергии посредством натяжения и высвобождения. Источник колебательной энергии может быть, например, приводом, соленоидом, вибратором, например, колебательным вибратором, двигателем, например стандартным двигателем или пьезоэлектрическим двигателем, или любым подобным источником энергии, содержащим элемент, выполняющий возвратно-поступательное перемещение, который может натягивать и высвобождать элемент натяжения. Под "высвобождением" понимают снятие усилия натяжения с элемента натяжения, причем это усилие натяжения генерируется посредством натяжения элемента натяжения. Источник колебательной энергии размещен вне катетера. Источник колебательной энергии натягивает элемент натяжения для выработки потенциальной энергии в пружинном элементе. Преобразование потенциальной энергии в кинетическую энергию происходит при снятии силы натяжения с элемента натяжения, при этом происходит повышение нагрузки на пружину и естественное расширение пружинного элемента, что тем самым локально передает механическую энергию сверлильному компоненту, нажимая на сверлильный компонент в направлении к дальнему концу, например, в направлении к окклюзии. Происходит повторение процесса при частоте и амплитуде, которые обеспечивают сверлильному компоненту возможность сверления через окклюзию. Величина энергии может быть отрегулирована посредством выбора соответствующего пружинного элемента, имеющего внутреннюю постоянную (k) пружины. Сила может быть дополнительно отрегулирована посредством внешней установки амплитуды натяжения элемента. Величина мощности (энергии в единицу времени), а также ударной нагрузки могут управляться посредством частотой колебаний.
[053] При этом усилие для выработки терапевтического колебания сверлильного компонента может быть обеспечено источником колебательной энергии, способным натягивать элемент натяжения на расстояние (x) для выработки силы натяжения (T), а затем снимать усилие натяжения. Элемент натяжения функционально связан на его дальнем конце с пружинным элементом. Структура на оконечности катетера, к которой прикреплен элемент натяжения, может быть сверлильным компонентом или пружинным элементом, например, дальним концом пружинного элемента. Возвратное усилие обеспечено пружинным элементом, имеющим коэффициент (k) упругости, так что сила натяжения в элементе натяжения может быть определена как T=kx. Повторяемая комбинация натяжения и высвобождения элемента натяжения генерирует колебания в сверлильном компоненте с частотой и амплитудой, достаточными для проникновения через окклюзию сосуда и очистки ее. Оператор может регулировать вибрацию посредством регулировки частоты и/или амплитуды колебаний посредством блока управления, который управляет источником колебательной энергии.
[054] Катетер может содержать одну или большее количество полостей для элемента(-ов) натяжения и полость для направляющей проволоки. Катетер может также содержать различные полости для других приспособлений, таких как проволока для управления перемещением или другой механизм, контрастные вещества для визуализации, внутрисосудистого ультразвукового исследования, элементы для измерения амплитуды перемещения и силы на дальнем конце, удаления остатков от окклюзии и т.д.
[055] Устройство по настоящему изобретению преодолевает ограничения известного уровня техники, в частности, потерю механической энергии между ближним концом устройства, на котором может быть размещен источник энергии, и удаленным концом устройства, на котором происходит сверление, посредством удаленного пружинообразного элемента, то есть пружинного элемента для локальной передачи усилия. Пружинный элемент способен быть заряженным, например, будучи сжатым для выработки потенциальной энергии, гибким элементом натяжения. Потенциальная энергия переходит в кинетическую энергию при снятии силы натяжения в элементе натяжения. Загрузка и высвобождение потенциальной энергии в кинетическую энергию происходят при необходимых частоте и амплитуде для выполнения колебания сверлильного компонента. Запасенная энергия пружинного элемента высвобождается по направлению к окклюзии через сверлильный компонент, который воздействует на окклюзию. При использовании здесь термин "гибкий" означает способный к изгибу в сторону без какого-либо момента инерции, например, для приспособления к извилистым сосудам, но не в продольном направлении, то есть элемент натяжения должен быть минимально поддающимся растяжению или удлинению. "Высвобождение элемента натяжения" означает снятие усилия натяжения, созданной в элементе натяжения посредством натяжения элемента натяжения.
[056] В отличие от потери энергии при передаче энергии от ближнего к дальнему концу устройства, как это обычно для устройств известного уровня техники, в настоящем изобретении потери энергии минимизированы при помощи комбинации пружинного элемента и элемента натяжения. Устройство согласно настоящему изобретению, включающему процесс натяжения и высвобождения, более эффективно, чем проталкивание жесткой проволоки, даже когда траектория элемента натяжения отклоняется от прямолинейной траектории, например, при сгибании катетера. Особенность настоящего изобретения, состоящая в более эффективной передаче энергии, обеспечивает улучшенное проникновение через частично или полностью окклюзированные сосуды, а также улучшенную пропускную способность катетеров при чрескожной транслюминальной ангиопластике. Соответственно, преимущество элемента натяжения согласно настоящему изобретению состоит в том, что величина усилия не будет значительно уменьшена при переходе от ближнего конца устройства, на котором происходит выработка энергии, к дальнему концу устройства, на котором сверлильный компонент воздействует на окклюзию. Другое важное преимуществе настоящего изобретения состоит в том, что величина (амплитуда и частота] усилия полностью контролируема пользователем, что обеспечивает пользователю возможность согласования силы с окклюзией и поддержания безопасности процедуры. Различные комбинации амплитуды и частоты могут быть достигнуты соответствующим выбором пружинного элемента, размещенного на дальнем конце катетера.
[057] Система по настоящему изобретению содержит блок управления, выполненный с возможностью регулирования силы, приложенной к окклюзии, посредством регулировки частоты или посредством регулировки амплитуды колебаний выполненного с возможностью колебаний элемента автоматически или по указанию оператора, например, врача. Оператор может точно настроить определенную частоту или амплитуду колебаний сверлильного компонента в любой момент времени непосредственно через блок управления или косвенно через блок интерфейса оператора, функционально связанный с блоком управления.
[058] Окклюзии, в частности сосудистые окклюзии, обычно имею! неравномерную плотность и твердость. Проникновение через более твердые части окклюзии требует относительно большей силы, чем необходимо для более мягких частей окклюзии. Минимальное усилие, необходимое для восстановления просвета пути через окклюзию, реализовано определенной комбинацией частоты и амплитуды колебаний. Увеличение амплитуды колебаний или увеличение частоты колебаний увеличивает усилие. Уменьшение амплитуды или частоты колебаний уменьшает усилие.
[059] Определение соответствующего усилия для данной окклюзии может быть осуществлено "на ощупь" врачом-оператором на основании опыта и искусства диагностики врача. Оператор может отрегулировать вибрацию для обеспечения усилия, соответствующего для проникновения через окклюзию, посредством ручной регулировки частоты и/или амплитуды колебаний непосредственно через блок управления. В качестве альтернативы устройстве согласно настоящему изобретению может дополнительно содержать датчик (например, датчик ткани), предназначенный для измерения непосредственно или косвенно твердости или жесткости биологического материала, формирующего окклюзию, а амплитуда и/или частота колебаний способного к вибрации элемента могут быть отрегулированы на основании обратной связи отдатчика.
[060] Датчик может быть, например, тензодатчиком, пьезорезистором, датчиком микродеформации или магнитным датчиком. Тензодатчик представляет собой устройство, используемое для измерения деформации (напряжения) объекта. Наиболее распространенный тип тензодатчика состоит из изолирующей гибкой подложки, которая поддерживает структуру из металлической фольги. Датчик присоединен к объекту соответствующим клеем, например, цианоакрилатом. При деформации объекта происходит деформация фольги, что приводит к изменению ее электрического сопротивления. Такое изменение сопротивления, обычно измеряемое с использованием моста Уистона, связано с деформацией величиной, известной как калибровочный коэффициент. Коммерческий пример такого тензодатчика, который может быть полезен в настоящем изобретении, представляет собой тензодатчик Vishay 015DJ (компания Vishay Intertechnology, Inc., Малверн, Пенсильвания, США). Пьезорезистор представляет собой резистор, выполненный из пьезорезистивного материала, имеющего чувствительность, пропорциональную пьезорезистивному калибровочному коэффициенту пьезорезистора, который определяется посредством относительного изменения сопротивления с деформацией. Кремний представляет собой обычный материал, посредством которого образуют датчики, содержащие пьезорезисторы. Такие пьезорезисторные датчики могут содержать, например, четыре пьезорезистора размером 6-10 мкм на 30-50 мкм, внедренных в гибкий элемент, имеющий форму креста с большим соотношением сторон и кремниевой мезаструктурой высотой 525 мкм, как описано в статье Beccai, L. и др.. "Конструкция и изготовление гибридного силиконового трехосевого датчика силы для биомеханических приложений," Датчики и исполнительные устройства A: Физические, т. 120, выпуск 2, стр. 370-382, 17 мая 2005 г. Пьезорезисторы также описаны в патентах США №4419598 и 6441716, содержание которых включено в настоящую заявку посредством ссылки; в заявке WO 2005/106417 описаны датчики деформации, основанные на пьезорезисторе в виде нанопроволоки. Магнитоупругие датчики представляют собой дешевые миниатюрные датчики без подвижных частей, имеющие другие свойства, полезные для биологических приложений. Магнитоупругие датчики описаны в патенте США №7062981, содержание которого включено в настоящую заявку посредством ссылки. В качестве коммерческих примеров таких магнитоупругих датчиков, которые могут быть полезны для настоящего изобретения, отметим микроминиатюрные вытеснительные датчики DVRT (компания MicroStrain, Inc., Берлингтон, Вермонт, США).
[061] Датчик может быть размещен на дальнем конце катетера для непосредственного измерения сопротивления, которое окклюзия оказывает элементу воздействия на окклюзию. Твердость окклюзии также может быть определена посредством измерения того, насколько пружинный элемент расширен после снятия нагрузки. В одном режиме работы для непосредственного измерения расширения пружинного элемента магнитный датчик может быть размещен в катетере, например, прикреплен к внутренней стенке катетера, или изменения в величине расширения или скорости замедления при воздействии на окклюзию могут служить косвенной мерой твердости или жесткости окклюзии. Ожидаемая амплитуда колебаний способного к вибрации элемента (то есть амплитуда силы вибрации) может быть установлена оператором, и при расширении пружинного элемента меньше установленного значения рассчитанная разность обеспечивает меру того, насколько необходимо увеличить силу натяжения для достижения правильной амплитуды колебаний для проникновения через окклюзию. В любом режиме работы датчик способен обеспечить обратную связь с процессором, вырабатывающим считываемый выходной сигнал для оператора, который может вручную отрегулировать входной импульс энергии и последующую силу натяжения посредством блока управления. В качестве альтернативы датчик может обеспечивать обратную связь непосредственно с блоком управления, который может быть выполнен с возможностью автоматической регулировки силы натяжения на входе.
[062] В одном варианте реализации настоящего изобретения система, в которой устройство содержит датчик и процессор, размещенный или в блоке управления или в пользовательском устройстве ввода - вывода (также называемом здесь блоком интерфейса оператора), способна анализировать входной сигнал от датчика или тензодатчика для вычисления твердости ткани или амплитуды колебаний и, таким образом, обеспечивать возможность автоматической регулировки частоты и/или амплитуды блоком управления или вручную врачом-оператором на основании удобочитаемого оператором выходного сигнала от блока интерфейса оператора. При необходимости блок интерфейса оператора может содержать блок отображения, например, экран дисплея, для отображения информации относительно твердости окклюзии или амплитуды колебаний в считываемой пользователем форме. В вариантах реализации настоящего изобретения с регулировкой оператором источника колебательной энергии блок управления или блок интерфейса оператора могут содержать одно или большее количество предназначенных для оператора средств в виде органа регулирования для ручной регулировки частоты и/или амплитуды силы натяжения, вырабатываемой источником колебательной энергии. Средства в виде органа регулирования могут быть выполнены, например, в виде ручек управления, циферблатов, кнопок, рычагов и т.п., обеспечивающих возможность регулировки амплитуды или частоты силы натяжения, вырабатываемой источником колебательной энергии, в цифровой форме или в аналоговом виде, подобном реостату или потенциометру.
[063] Система может дополнительно содержать систему управления силой натяжения. При встрече катетера с искривлениями в сосуде происходит изменение его формы, что изменяет расстояние через катетер, которое должен пройти элемент натяжения. Например, при перемещении катетера по криволинейному или извилистому просвету путь, проходимый элементом натяжения через полость катетера, изменяется, например, он имеет тенденцию отклонения к внутренней части кривой, а не идет посередине полости. Это отклонение может составить примерно 1% или такое различие в расстоянии от источника колебательной энергии до сверлильного компонента устройства, что, таким образом, воздействует на эффективность натяжения элемента натяжения для реализации колебаний способного к вибрации элемента на дальнем конце катетера. Более короткая траектория может приводить к уменьшенной силе натяжения на элементе натяжения, а большая амплитуда натяжения, реализуемая источником колебательной энергии, может быть необходима для достижения постоянной силы натяжения. Для приспособления к изменениям в траектории элемента натяжения и управления элементом натяжения в одном варианте реализации настоящего изобретения система может содержать механизм для управления силой натяжения, регулирующий длину элемента натяжения. Таким образом, сила натяжения элемента натяжения может быть поддержана на необходимом постоянном уровне, что, таким образом, улучшает эффективность устройства. Механизм для управления силой натяжения может регулировать длину элемента натяжения. Согласно предпочтительной особенности этого варианта реализации длина элемента натяжения отрегулирована в области между телом катетера и двигателем источника колебательной энергии. В альтернативном варианте реализации настоящего изобретения система может содержать механизм для управления силой натяжения, регулирующий амплитуду, с которой натягивают элемент натяжения.
[064] Взятые в качестве примера варианты реализации настоящего изобретения подробно описаны ниже со ссылками на чертежи. Схематичные и не обязательно соблюдающие масштаб чертежи предназначены для изображения определенных особенностей вариантов реализации настоящего изобретения и не предназначены для ограничения объема изобретения.
[065] В частном варианте реализации настоящего изобретения, показанном на фиг. 1А-Е, пружинный элемент 20 реализован в виде пружины сжатия. Элемент 10 натяжения прикреплен, на его дальнем конце, к сверлильному компоненту 30, который присоединен к дальнему концу пружинного элемента 20 (пружины сжатия) и служит в качестве способного к вибрации (вибрационного) элемента. Пружинный элемент 20 прикреплен на его ближнем конце к дальнему концу катетера 40. Пружина сжатия предназначена для обеспечения сопротивления силам сжатия. В соответствии с настоящим изобретением элемент 10 натяжения использован для сжатия пружинного элемента 20 (пружины сжатия) при силе (T) натяжения, где T=kx, (k) равно коэффициенту упругости, а (x) - отклонению пружины (также называемому здесь "расстоянием сжатия"), в идеале равному расстоянию, на которое растянут элемент 10 натяжения. После снятия силы натяжения с элемента 10 натяжения пружинный элемент 20 (пружина сжатия) выполняет естественное расширение и, предпочтительно, при отсутствии сопротивления пружинный элемент 20 (пружина сжатия) выполняет расширение далее примерно на расстояние (y) перед возвратом к свое ненагруженное положение (0). В случаях наличия сопротивления пружинному элементу, например, со стороны окклюзии, пружина выполняет расширение до точки удара об окклюзию и, возможно, не достигает положения расширения, достижимого при отсутствии сопротивления. В таких случаях Δy будет меньше Δyx, где yx представляет собой естественное расширение для пружинного элемента, сжатого на величину x (отклонение = x). Оптимальный коэффициент (k) упругости пружины для такой пружины сжатия в соответствии с настоящим изобретением равен примерно 0,1-10 Ньютон на мм.
[066] На фиг. 1А-Е в поперечном сечении, проведенном через оконечность 1 катетера, более ясно показано состояние для варианта реализации устройства по настоящему изобретению, содержащего пружинный элемент, который представляет собой пружину сжатия, в различные моменты времени во время одного цикла натяжения. В контексте этого чертежа "один цикл натяжения" означает одно натяжение и высвобождение элемента натяжения. На фиг. 1А показаны элементы оконечности 1 катетера в состоянии покоя, в котором на элемент 10 натяжения не воздействует сила натяжения, и пружинный элемент 20 не испытывает никакой нагрузки. Как показано на фиг. 1B, при приложении силы (T) натяжения к элементу 10 натяжения происходит сжатие пружинного элемента 20, с запасанием, таким образом, энергии. На фиг. 1С показано устройство на некоторой стадии после высвобождения элемента 10 натяжения, в которой значение силы натяжения в элементе 10 натяжения падает до нуля (T=0). После высвобождения элемента 10 натяжения источником колебательной энергии (не показан) происходит расширение пружинного элемента 20 в осевом направлении. Расширение пружинного элемента 20 перемещает сверлильный компонент к дальнему концу со скоростью, превышающей 0 (V>0). Скорость механического перемещения (V, скорость) головки в момент времени, показанный на фиг. 1С, при котором кинетическая энергия максимальна при нахождении пружинного элемента 20 на полпути между максимальным сжатием и максимальным расширением для заданной приложенной силы натяжения (то есть эквивалентно его положению покоя), может быть выражена как

[067] Многократное натяжение и высвобождение элемента натяжения приводят к колебанию сверлильного компонента, который присоединен к дальнему концу пружинного элемента. Амплитуда колебаний сверлильного компонента может быть управляема посредством расстояния, на которое натягивают элемент натяжения. Частота колебания будет функцией скорости натяжения и высвобождения элемента натяжения и коэффициента упругости. В предпочтительном варианте реализации частота натяжения/высвобождения, вырабатываемая источником колебательной энергии, ниже собственной частоты пружины.
[068] Вариант реализации по фиг. 1А-Е показывает элемент натяжения, прикрепленный к сверлильному компоненту, который может также быть назван вибрационным элементом устройства. В качестве альтернативы дальняя структура оконечности катетера, к которой может быть прикреплен указанный элемент натяжения, представляет собой пружинный элемент. Сверлильный компонент представляет собой элемент устройства, который, при использовании, входит в контакт с окклюзией сосуда и работает в качестве части устройства, которая проникает и просверливается через окклюзию.
[069] В предпочтительном варианте реализации настоящего изобретения, как показано на фиг. 1А-Е, пружинный элемент представляет собой пружину сжатия. Циклы натяжения могут быть реализованы источником колебательной энергии. Источник колебательной энергии способен механически натягивать элемент натяжения, элемент натяжения способен вызвать сжатие пружинного элемента, и сверлильный компонент, таким образом, может выполнять перемещение к ближнему концу. Затем, после снятия силы натяжения в элементе натяжения, приводящего к расширению пружинного элемента, сверлильный компонент может выполнять перемещение к дальнему концу.
[070] В предпочтительном варианте реализации настоящего изобретения пружинный элемент представляет собой конструкцию с открытыми витками. "Открытые витки" означают, что по меньшей мере два витка пружины размещены с промежутком друг от друга. Например, 2-10 витков могут быть навиты с промежутками друг от друга, или 5-20 витков могут быть навиты с промежутками друг от друга. Общее количество витков в пружинном элементе будет функцией длины пружинного элемента, промежутков между витками и поперечным диаметром проволоки, образующей виток.
[071] Пружинные элементы, отличные от пружин сжатия, способны работать тем же самым образом в соответствии с настоящим изобретением. Например, пружинный элемент может быть выполнен в виде витой пружины, листовой пружины, гофрированной мембраны или сжимаемого полимера. В качестве альтернативы, в случае необходимости меньшего значения амплитуды колебания и большего значения частоты и силы, элемент натяжения может быть прикреплен в определенной точке на пружинном элементе, ближней на дальнем конце пружинного элемента.
[072] В одном варианте реализации настоящего изобретения пружинный элемент выполнен в виде гофрированной мембраны. При использовании здесь гофрированная мембрана представляют собой по существу уплотненный элемент, обладающий встроенной в него возвратной силой (коэффициентом упругости) и может быть, например, выполнен в виде уплотненной покрытой пружины или гофрированной трубки, содержащей пружину сжатия. Гофрированная мембрана может иметь открытую конструкцию или закрытую конструкцию. Под "закрытой конструкцией" гофрированной мембраны понимают, что один конец гофрированной мембраны закрыт в виде чаши; под "открытой конструкцией" гофрированной мембраны понимают, что оба конца гофрированной мембраны открыты в виде трубки. В закрытой конструкции закрытый конец должен быть размещен на дальнем конце. Таким образом, в случае закрытой конструкции гофрированной мембраны она функционально связана на своем дальнем закрытом конце с элементом натяжения. Структуры этих гофрированных мембран могут быть разработаны так, что они могут быть сжаты под нагрузкой от элемента натяжения и возвращены (расширены) в прежнее состояние внутренней силой пружины после снятия внешней нагрузки. Гофрированные мембраны, пригодные для настоящего изобретения, доступны, например, от компании MS Bellows, 5322 Макфэдден-Авеню, Хантингтон-Бич, Калифорния 92649. Термины "гофрированная мембрана" и "пружинная мембрана" использованы здесь взаимозаменяемо. В качестве альтернативы специалист в данной области техники способен выполнить гофрированную мембрану на дальнем конце посредством покрытия пружины полимером или внедрением пружины в полимер, так что полимерная мембрана может быть выполнена с возможностью расширения в продольном (осевом) направлении. В предпочтительном варианте реализации настоящего изобретения этот полимерный материал обладает более низким значением твердости (твердости по Шору), чем материал, составляющий внешние стенки катетера.
[073] В этом варианте реализации настоящего изобретения элемент натяжения может быть прикреплен к дальнему концу закрытой гофрированной мембраны или к сверлильному компоненту, который функционально присоединен к дальнему концу гофрированной мембраны. При таком размещении, аналогичном пружине сжатия, при приложении источником колебательной энергии силы натяжения к элементу натяжения, элемент натяжения вызывает сжатие гофрированной мембраны, так что происходит отклонение дальнего конца гофрированной мембраны на расстояние (x). При снятии источником колебательной энергии силы натяжения, воздействующей на элемент натяжения, происходит расширение гофрированной мембраны и возвращение дальнего конца гофрированной мембраны к его разгруженному положению (отклонение 0), и в предпочтительном варианте реализации происходит перемещение в направлении удаления за пределы положения (0) до отклонения, примерно равного (y) в направлении удаления, перед возвратом к ненагруженному положению (0).
[074] Согласно этому варианту реализации гофрированная мембрана предназначена для сжатия под нагрузкой от элемента натяжения и расширения при снятии этой нагрузки. Многократная нагрузка и разгрузка гофрированной мембраны приводят к колебанию дальнего конца гофрированной мембраны, к которому прикреплен сверлильный компонент.
[075] Обычно сверлильный компонент 30, 130, 230, 330, 530 может быть сужен к дальнему концу для уменьшения поперечного профиля оконечности катетера. Это сужение будет приводить к уменьшенному профилю на входе и, таким образом, к улучшению доставляющей способности и проходимости через суженные и/или стенозированные сосуды и/или кальцинированные поражения. Для некоторых приложений может быть предпочтительным, чтобы внутренний диаметр сужающегося сверлильного компонента (диаметр просвета) сам не был подвержен сужению. В таких вариантах реализации сверлильный компонент имеет внутренний диаметр (диаметр просвета), постоянный вдоль всей длины сверлильного компонента. Другими словами, внутренний диаметр одинаков вдоль длины в осевом направлении сверлильного компонента, а внешний диаметр постепенно спадает в направлении к дальнему концу. В качестве альтернативы внутренний диаметр сверлильного компонента может быть сужен в направлении к дальнему концу, но с меньшей конусностью, чем сужение внешнего диаметра, то есть он имеет меньшую конусность, чем внешний диаметр. Это сужение (скорость уменьшения) внешнего диаметра определяет фактическую степень сужения сверлильного компонента. В одном варианте реализации настоящего изобретения пружинный элемент также сужен к дальнему концу, и в отдельной особенности этого варианта реализации пружинный элемент, как и сверлильный компонент, имеет сужающийся внешний диаметр и диаметр внутреннего просвета, не подверженный сужению, то есть имеет постоянный или почти постоянный диаметр.
[076] Одно преимущество постоянного или почти постоянного внутреннего диаметра сверлильного компонента, или оконечности катетера (пружинный элемент и сверлильный компонент), состоит в том, что эта конструкция может управлять внутренним трением между сверлильным компонентом (или оконечностью катетера) и направляющей проволокой, которая проходит через него, и ограничивать это трение. Другое преимущество состоит в ограничении трения между сверлильным компонентом (или оконечностью катетера) и мандрелью, на которую катетер устанавливают во время изготовления.
[077] На фиг. 2 показан пример оконечности 101 катетера согласно настоящему изобретению, содержащему пружинный элемент 120 и сверлильный компонент 130 для использования в устройстве согласно настоящему изобретению. В этом варианте реализации настоящего изобретения сверлильный компонент выполнен суженным, сужение внешнего диаметра и внутреннего происходит с одинаковой конусностью (показано) или с разной конусностью (не показано), а пружинный элемент 120 не сужен. Вариант реализации по фиг. 2 также показывает одну витую проволочную пружину, имеющую дальний участок и ближний участок, причем дальний участок представляет собой плотно навитый сверлильный компонент 130, а ближний участок представляет собой пружинный элемент 120 с открытыми витками.
[078] Взятые в качестве примера варианты реализации конических сверлильных узлов, имеющих постоянный внутренний диаметр для использования в оконечностях катетера согласно настоящему изобретению, показаны на фиг. 3A и 3B. Пружинный элемент может также быть сужен к дальнему концу, как показано на фиг. 3A. При наличии этой особенности суженный пружинный элемент может иметь постоянный или почти постоянный диаметр внутреннего просвета. Согласно другой особенности (не показана) диаметр внутреннего просвета пружинного элемента сужен с меньшей конусностью, чем внешний диаметр.
[079] Один способ сужения внешнего диаметра сверлильного компонента при сохранении постоянным или почти постоянным внутреннего диаметра состоит в выполнении оконечности катетера в виде проволоки, намотанной конической проволокой. "Конической проволокой" называют проволоку, имеющую уменьшающийся вдоль ее длины поперечный диаметр 231. Такая суженная оконечность катетера, включающая суженный пружинный элемент 220 (с промежутками между витками) и суженный сверлильный компонент 230 (плотно намотанный), показана на фиг. 3A. В одном неограничивающем варианте реализации настоящего изобретения поперечный диаметр 231 проволоки может составлять 0,1 мм на первом конце (ближний конец 246 витков проволоки), и поперечный диаметр 231 проволоки может составлять 0,05 мм на втором конце (дальний конец 245 витков проволоки). Могут быть использованы другие градации поперечного диаметра 231 проволоки в зависимости от степени сужения, необходимой для пружинного элемента 220 и сверлильного компонента 230. Например, поперечный диаметр конической проволоки может быть уменьшен на 30-70% между первым концом и вторым концом. Получение конического внешнего диаметра при сохранении постоянного внутреннего диаметра просвета для пружинного элемента 220 и сверлильного компонента 230, сформированных из конической проволоки, может быть обеспечено во время производства посредством намотки конической проволоки на мандрель фиксированного диаметра. Внутренний диаметр просвета получаемых в результате и выполненных из витков проволоки пружинного элемента 220 и сверлильного компонента 230 остается постоянным или почти постоянным, а эффект уменьшения диаметра проволоки будет преобразован в уменьшенный внешний диаметр для получаемого в результате оконечности 201 катетера. Точно так же внутренний диаметр просвета, имеющий меньшее сужение, чем внешний диаметр, может быть достигнут во время изготовления посредством намотки конической проволоки на мандрель, имеющей степень сужения меньше чем для поперечного диаметра конической проволоки.
[080] При необходимости ближний конец пружинного элемента может содержать плотно сжатую секцию витков, как показано на фиг. 3A, обозначенную как область A.
[081] На фиг. 3B показан другой вариант реализации конического сверлильного компонента 330, содержащего сужающийся к дальнему концу внешний диаметр и постоянный или почти постоянный внутренний (просветный) диаметр. Способ выполнения варианта реализации по фиг. 3B сначала включает неконический сверлильный компонент (например, катушку, имеющую постоянный внешний диаметр вдоль ее длины), и затем воздействие на внешнюю поверхность сверлильного компонента лазерным излучением или химическим травлением, или любыми другими средствами полировки или шлифования внешней поверхности проволочной катушки для получения постепенно уменьшающегося по направлению к дальнему концу 345 поперечного диаметра 331 проволочной катушки. Катушка сверлильного компонента 330, таким образом, получена суженной в направлении к дальнему концу на ее наружной поверхности, но диаметр внутреннего просвета сохранен по существу постоянным. Таким образом, согласно одной особенности этого варианта реализации первоначальный поперечный диаметр проволоки может быть, например, равен 100 микрометров и может быть уменьшен в направлении к дальнему концу примерно на 30-70% от ближнего конца 346 к дальнему концу 345 сверлильного компонента 330. После шлифования внешней поверхности витков до нужной конусности сверлильный компонент 330 может быть отполирован для получения гладкой поверхности, сводящей к минимуму повреждения стенок сосуда.
[082] Устройство и система по настоящему изобретению совместимы для использования с компонентами для создания изображения, предназначенными для помощи оператору при определении местоположения дальнего конца катетера относительно целевой окклюзии или стенок сосуда во время работы устройства. Таким образом, устройство или система могут дополнительно содержать компоненты для создания изображения и систему для создания изображения, например, систему внутрисосудистого ультразвукового исследования, систему оптического распознавания символов, систему ультразвукового доплеровского исследования или другие системы создания изображения, известные в данной области техники. Катетер может дополнительно содержать одну или большее количество полостей для дополнительных компонентов, таких как полость для компонента визуализации или создания изображения, например, систему внутрисосудистого ультразвукового исследования, систему оптического распознавания символов, систему ультразвукового доплеровского исследования, волоконно-оптических компонентов или контрастных веществ, а также вспомогательную полость для размещения таких полезных компонентов, как компоненты для направления перемещения или другие терапевтические компоненты. Полость может быть предназначена для работы в качестве полости для направляющей проволоки, предназначенной для введения катетера в полость тела, а затем, при отсутствии необходимости использования направляющей проволоки она может быть удалена, и полость может быть использована для развертывания устройства визуализации для использования во время работы устройства, например, при проникновении в окклюзию и прохождении ее. В качестве альтернативы эта полость может быть использована для отсасывания остатков от области сверления во время проникновения в окклюзию.
[083] В любом из вариантов реализации настоящего изобретения устройство может при необходимости содержать элемент фиксации катетера, прикрепляющий катетер к стенкам кровеносного сосуда. Элемент фиксации катетера может быть использован для стабилизации катетера внутри полости тела во время работы для предотвращения существенного перемещения в ответ на колебательные силы и прикрепления катетера к стенкам кровеносного сосуда для улучшения передачи силы вибрации. Элемент фиксации катетера может быть реализован полостью элемента фиксации. Элемент фиксации катетера может быть выполнен, например, в виде одного или большего количества расширяемых баллонов. В таком варианте реализации настоящего изобретения полость для элемента фиксации может быть надуваемой полостью, заполненной текучей средой, предпочтительно жидкостью, и еще предпочтительнее биологически совместимой жидкостью, и может быть использована для надувания (расширения) одного или большего количества расширяемых баллонов для закрепления катетера в кровеносном сосуде. Закрепление катетера таким образом сделает силы вибрации более эффективными при обработке определенных типов окклюзий.
[084] Устройство согласно настоящему изобретению может дополнительно содержать датчик для измерения твердости подлежащей проникновению окклюзии. На фиг. 4А-С показаны особенности датчика ткани и его работа в связи с настоящим изобретением. В частности, фиг. 4А-С показывают один способ измерения того, достигнута ли нужная амплитуда, посредством использования датчика ткани, содержащего зонд, тензодатчик и датчик касания. Для ясности иллюстрации сверлильный компонент на дальнем конце пружинного элемента 420 не показан на фиг. 4А-С.
[085] Система может быть отрегулирована оператором для достижения нужного смещения, или целевой амплитуды (A0) проникновения. Однако, целевая амплитуда A0 не может быть достигнута при отсутствии согласования приложенной силы с твердостью окклюзии, и достигнутая амплитуда (A) должна быть определена. Достигнутая амплитуда A может контролироваться посредством датчика любым из описанных ниже нескольких способов, или она станет очевидной для специалиста в данной области техники из сформулированных ниже примеров. Например, достигнутая амплитуда A может быть измерена непосредственно, например, посредством использования тензодатчика или измерения смещения дальнего конца пружинного элемента 420. В таких вариантах реализации датчик может содержать зонд 451, тензодатчик 452 и датчик 453 касания, которые, как показано на фиг. 4А-С, измеряют твердость окклюзии независимо от силы натяжения на сверлильном компоненте. В качестве альтернативы датчик может содержать магнитный датчик 560, который может быть прикреплен непосредственно к сверлильному компоненту 530, как показано, например, на фиг. 5А-В для измерения амплитуды колебаний сверлильного компонента 530. Поскольку устройство содержит пружинный элемент 520, сжимаемый посредством натяжения элемента 510 натяжения, и при высвобождении расширяемый с прохождением положения покоя в состояние растяжения, амплитуда проникновения может быть определена посредством измерения фактического расстояния растяжения (достигнутой амплитуды A, на которую воздействует сопротивление со стороны окклюзии) и сравнения с ожидаемым расстоянием растяжения пружинного элемента 520.
[086] Сила, необходимая для проникновения через окклюзию, может быть оценена согласно Уравнению 2:

где F представляет собой силу, приложенную к объекту, E представляет собой модуль Юнга (твердость или жесткость) окклюзии, S представляет собой первоначальную площадь поперечного сечения, к которой приложена сила (то есть площадь поперечного сечения зонда или датчика), ΔL представляет собой величину, на которую изменилась длина объекта, и L0 представляет собой первоначальную длину объекта. Для определения механических свойств ткани окклюзии с целью регулировки частоты и амплитуды для проникновения следует контролировать два параметра: силу (F) и смещение (L). Что касается других параметров в Уравнении 2, то значение S (площадь поперечного сечения зонда или датчика, который может быть направляющей проволокой или другим элементом с известными размерами) известно, тогда как длина L окклюзии неизвестна. Однако, сила, необходимая для проникновения через ткань неизвестной твердости, может быть определена, как показано на фиг. 4А-С. Имеют место катетер 440, пружинный элемент 420, прикрепленный к дальнему концу катетера 440, и датчик. Датчик содержит зонд 451, тензодатчик 452 и датчик 453 касания. В рабочем цикле существуют два режима, а именно, режим измерения и режим вибрации. Сначала в последовательности операций выполняют измерение, затем происходит вибрация. В режиме измерения, при размещении датчика 453 касания вблизи окклюзии 470 и касании ее, как показано на фиг. 4А (врач-оператор может почувствовать контакт), режим измерения включен. Режим измерения представляет собой режим одного импульса и зонд способен проникнуть в окклюзию.
[087] Поскольку сила (F) зависит от массы (m) и ускорения (apeak), приложенная при вибрации сила может быть определена так, как указано в Уравнении 3:

Таким образом, в соответствии с Уравнением 3, значение приложенной силы определено смещением ΔL и частотой

[088] На фиг. 5A и 5B показан датчик для непосредственного измерения амплитуды колебаний сверлильного компонента. Магнитный датчик 560 может быть присоединен к внутренней стенке катетера 540 или к внутренней стенке полости датчика внутри катетера (не показано) и функционально связан со сверлильным компонентом 530 через магнитный стержень 562. Магнитный стержень 562 подвижен при колебании сверлильного компонента 530 посредством натяжения и высвобождения элемента 510 натяжения. На фиг. 5А показано положение магнитного стержня 562 относительно магнитного датчика 560 при натяжении элемента 510 натяжения для сжатия пружинного элемента 520. На фиг. 5 В показано положение магнитного стержня 562 относительно магнитного датчика 560, когда элемент 510 натяжения, при отсутствии нагрузки на пружинный элемент 520. Амплитуда колебаний сверлильного компонента 530, таким образом, может быть измерена посредством магнитного датчика 560. В качестве альтернативы магнитный стержень 562 может быть непосредственно соединен с дальним концом пружинного элемента 520 (этот вариант реализации не показан). В любом варианте реализации настоящего изобретения магнитный датчик 560 непосредственно измеряет достигнутую амплитуду на дальнем конце катетера 540. Достигнутая амплитуда может быть меньше целевой амплитуды вследствие, например, сопротивления, возникающего при воздействии на окклюзию. Магнитный датчик 560, показанный на фиг. 5А-В, представляет собой линейно регулируемый дифференциальный трансформатор и показывает магнитный стержень 562, подвижный внутри витков 561 линейно регулируемого дифференциального трансформатора, однако другие магнитные датчики могут также быть использованы для непосредственного измерения достигнутой амплитуды колебаний в соответствии с настоящим изобретением.
[089] Изобретение охватывает способ управления усилием вибрации. На фиг. 6 показан один возможный способ использования блока управления в соответствии с настоящим изобретением для слежения за амплитудой проникновения и регулировки, в случае необходимости, амплитуды колебаний. Управление частотой и амплитудой колебаний лучше всего может быть понято в контексте проникновения через окклюзию, такую как сосудистая окклюзия. При использовании системы по настоящему изобретению для проникновения через окклюзию сосуда полное проникновение может произойти в последовательности циклов проникновения, в которых частота и целевая амплитуда установлены до инициации вибрации в устройстве, а затем отрегулированы блоком управления во всем цикле проникновения. Каждый цикл проникновения может включать последовательность «циклов» вибрации, в которых происходит периодическое измерение эффективности вибрации и по мере необходимости регулировка усилия (силы) таким образом, чтобы максимизировать как безопасность, так и успех проникновения. Как обсуждено выше, в одном режиме работы необходимая амплитуда проникновения (ход) может быть установлена равной фиксированному расстоянию. Блок управления системы по настоящему изобретению может быть использован для слежения за тем, достигнута ли эта целевая амплитуда проникновения, и регулировки амплитуды и/или частоты вибрации для увеличения, соответственно, силы вибрации на основании Уравнения 4:

Таким образом, в таком режиме работы, в начале цикла проникновения устройство может быть размещено на первой поверхности окклюзии, и происходит инициация последовательности циклов (С) вибрации, причем блок управления управляет силой вибрации в ответ на информацию от датчика посредством регулировки частоты и/или амплитуды колебаний. После проникновения через первую поверхность устройство может быть продвинуто к новой плоскости или поверхности окклюзии, и может быть начат новый цикл проникновения. Таким образом, через поверхность окклюзии можно проникать пошаговым образом.
[090] В предпочтительном варианте реализации настоящего изобретения цикл проникновения (P) начинают после инициации блока управления посредством управляющей информации, то есть значений, имеющих отношение к амплитуде, частоте и к итерациям регулировки вибрации. Управляющая информация может быть встроена в блок управления или может быть установлена оператором. В варианте реализации настоящего изобретения, показанном на фиг. 6, блок управления получает управляющую информацию от оператора, который устанавливает первоначальное (целевое) смещение или амплитуду (A0), максимальное смещение (Amax), принимая во внимание соображения безопасности, начальную частоту



[091] В соответствии с вариантом реализации схемы управления, показанном на фиг. 6, после получения управляющей информации блок управления устанавливает значение (I) счетчика итераций на нуль (Шаг 1). Источник колебательной энергии выполнен с возможностью вырабатывать силу натяжения на элементе натяжения, и цикл (C) вибрации начат (Шаг 2). Сила натяжения с рабочей амплитудой (A), как ожидают, будет вырабатывать смещение на дальнем конце за пределы положения покоя пружины. Смещение на дальнем конце, или достигнутую амплитуду (A), измеряют, в предпочтительном варианте реализации настоящего изобретения посредством датчика, и эту величину периодически передают для получения блоком управления (Шаг 3), который сравнивает достигнутую амплитуду (A) с целевой амплитудой (A0) (Шаг 4). Если достигнутая амплитуда (A) меньше целевой амплитуды (A0), то происходит приращение счетчика (I) итераций (Шаг 5а), то есть I+1, и рабочую амплитуду (Ai) и/или рабочую частоту


где нижний индекс "i" отражает текущее значение счетчика итераций. Сила осциллирующей системы пропорциональна квадрату частоты и амплитуде, как показано в Уравнениях 4 и 5. Полагают, что с клинической точки зрения лучше работать при низкой амплитуде, в предпочтительном варианте реализации настоящего изобретения при амплитуде до 100 мкм (0,1 мм). Таким образом, для поддержания безопасности процедуры проникновения через окклюзию, предпочтительно увеличивать силу, увеличивая частоту, однако физическая структура устройства способна налагать верхние предельные значения на частоту. Так что, для достижения соответствующей силы для проникновения через окклюзию, или частота или амплитуда могут быть увеличены до максимальных величин, установленных в управляющей информации. Увеличение значения амплитуды и/или частоты при каждой итерации может происходить от примерно 2% до примерно 5%. Таким образом, для заданного полного увеличения силы в цикле проникновения количество итераций может зависеть от используемого значения увеличения.
[092] После увеличения силы вибрации происходит сравнение счетчика (I) итераций с максимальным значением (Imax) счетчика итераций и рабочей амплитуды (Ai) и рабочей частоты



[093] Если после сравнения измеренного смещения (достигнутой амплитуды А) с целевой амплитудой (A0) (Шаг 4), достигнутая амплитуда (Ai) не меньше целевой амплитуды (A0), то достигнутую амплитуду (Ai) сравнивают с максимальной амплитудой (Amax) (Шаг 5b). Если достигнутая амплитуда (Ai) меньше максимальной амплитуды (Amax), то значение (I) счетчика итераций устанавливают на нуль (Шаг 1), приступают к новому циклу вибрации (Шаг 2) с теми же самыми рабочей частотой
[094] Таким образом, предложен способ управления частотой и амплитудой колебания и, следовательно, усилием вибрации устройства по настоящему изобретению. В одном варианте реализации настоящего изобретения способ управления силой вибрации основан на схеме по фиг. 6. Таким образом, один способ управления силой вибрации включает: a) получение начальных параметров управления; b) инициацию цикла итераций вибрации, включающего по меньшей мере одну операцию натяжения и высвобождения элемента натяжения источником колебательной энергии, достаточную для обеспечения вибрации сверлильного компонента с усилием (F) вибрации, причем указанный элемент натяжения присоединен к сверлильному компоненту, размещенному на дальнем конце пружинного элемента, и на ближнем конце к указанному источнику колебательной энергии, причем указанный пружинный элемент прикреплен на ближнем конце к дальнему концу катетера, указанный катетер размещает указанный элемент натяжения, и указанный сверлильный компонент присоединен к указанному дальнему концу указанного пружинного элемента, и причем указанная операция натяжения и высвобождения указанного элемента натяжения приводит к сжатию и расширению указанного пружинного элемента; c) получение достигнутой амплитудной величины в качестве входного значения для указанного цикла итераций вибрации; и d) регулировку указанного усилия вибрации в соответствии с указанной достигнутой величиной амплитуды. Согласно одной особенности указанное получение начальных параметров управления включает: (i) получение входного значения целевой амплитуды; ii) получение максимального входного значения целевой амплитуды; iii) получение начального входного значения частоты; iv) получение максимального входного значения частоты; и v) получение входного значения максимального числа итераций. Согласно другой особенности указанная инициация включает: (i) установку счетчика итераций на нуль; и (ii) начало указанного цикла итераций вибрации в указанном устройстве, причем указанная по меньшей мере одна операция натяжения и высвобождения происходит при начальной частоте и целевой амплитуде. Согласно еще одной особенности указанная регулировка включает: (i) сравнение указанного достигнутого значения амплитуды с целевым значением амплитуды и максимальным значением амплитуды; (ii) увеличение счетчика итераций на единицу, когда указанное достигнутое значение амплитуды меньше указанного целевого значения амплитуды, установление счетчика итераций на нуль, когда указанное достигнутое значение амплитуды не меньше указанного целевого значения амплитуды, и остановку указанного цикла итерации вибрации, когда указанное достигнутое значение амплитуды не меньше целевого значения амплитуды и не меньше указанного максимального значения амплитуды; и (iii) увеличение указанной силы вибрации посредством увеличения приращения частоты и/или приращения амплитуды примерно на 2-5% в соответствии с уравнением

[095] Другой способ управления силой вибрации включает: а) получение начальных параметров управления; b) инициацию цикла итераций вибрации, включающего по меньшей мере одну операцию натяжения и высвобождения элемента натяжения источником колебательной энергии, достаточную для обеспечения вибрации сверлильного компонента с силой (F) вибрации; c) получение достигнутого амплитудного значения в качестве входного значения для указанного цикла итераций вибрации; и d) регулировку указанной силы вибрации в соответствии с указанной достигнутой величиной амплитуды. Шаг получения управляющей информации может дополнительно включать: (i) получение входного значения целевой амплитуды; ii) получение максимального входного значения целевой амплитуды; iii) получение начального входного значения частоты; iv) получение максимального входного значения частоты; и v) получение входного значения максимального числа итераций. Шаг инициации цикла вибрации может дополнительно включать: (i) установку счетчика итераций на нуль; и (ii) начало указанного цикла итераций вибрации в указанном устройстве, причем указанная по меньшей мере одна операция натяжения и высвобождения происходит при начальной частоте и целевой амплитуде. Шаг регулировки указанной силы вибрации может дополнительно включать: (i) сравнение указанного достигнутого значения амплитуды с целевым значением амплитуды и максимальным значением амплитуды; (ii) увеличение счетчика итераций на единицу, когда указанное достигнутое значение амплитуды меньше указанного целевого значения амплитуды, установление счетчика итераций на нуль, когда указанное достигнутое значение амплитуды не меньше указанного целевого значения амплитуды, и остановку указанного цикла итерации вибрации, когда указанное достигнутое значение амплитуды не меньше целевого значения амплитуды и не меньше указанного максимального значения амплитуды; и (iii) увеличение указанной силы вибрации посредством увеличения приращения частоты и/или приращения амплитуды примерно на 2-5% в соответствии с уравнением
[096] В другом варианте реализации настоящего изобретения способ включает: а) получение входного значения целевой амплитуды, входного значения максимальной амплитуды, входного значения целевой частоты, входного значения максимальной частоты, и входного максимального значения счетчика итераций; b) установку значения счетчика итераций на нуль; с) инициацию цикла итераций вибрации, включающему по меньшей мере одну операцию натяжения и высвобождения элемента натяжения источником колебательной энергии, достаточную для обеспечения вибрации сверлильного компонента с силой (F) вибрации; d) получение достигнутого амплитудного значения в качестве входного значения для указанного цикла итераций вибрации; е) сравнение указанного значения достигнутой амплитуды с указанным значением целевой амплитуды; f) увеличение указанной силы вибрации посредством увеличения приращения частоты и/или приращения амплитуды примерно на 2-5% в соответствии с уравнением
[097] Вышеописанный вариант реализации представляет собой только пример и не предназначен для ограничения способов, посредством которых способен работать блок управления. Может быть использовано любое количество схем регулировки частоты и/или амплитуды колебаний. Другие способы работы блока управления должны быть очевидны специалистам в данной области техники в соответствии с приведенным здесь раскрытием. Например, схема управления может включать уменьшение силы вибрации посредством уменьшения рабочей амплитуды, если достигнутая амплитуда не меньше целевой амплитуды и не меньше максимальной амплитуды для одной или большего количества итераций перед остановкой цикла вибрации и цикла проникновения.
[098] Как описано выше, существует множество способов управления достигнутой амплитудой (A). Это может быть выполнено посредством использования датчика ткани для измерения твердости окклюзии или степени проникновения в окклюзию или посредством использования магнитного датчика для измерения смещения дальнего конца пружинного элемента. В предпочтительном варианте реализации настоящего изобретения процедура проникновения в окклюзии начата с минимальной силой, постепенно увеличиваемой согласно твердости ткани. Алгоритм управления также может быть использован для вычисления необходимой силы на основании обратной связи относительно твердости окклюзии.
[099] С учетом способа регулировки силы вибрации способ прохождения окклюзии сосуда может дополнительно включать шаг регулировки частоты и/или амплитуды колебаний посредством блока управления на основании твердости окклюзии при использовании варианта реализации вышеупомянутого способа управления силой вибрации. В предпочтительном варианте реализации настоящего изобретения, где частота колебаний отрегулирована для достижения соответствующей силы на основании информации относительно твердости окклюзии или смещения дальнего конца пружинного элемента, устройства содержит датчик, а твердость окклюзии и смещение пружины определены на основании показаний датчика. В некоторых вариантах реализации шаг регулировки может быть выполнен вручную, а в других вариантах реализации шаг регулировки может быть выполнен автоматически. В частности способ может включить обработку хронической полной окклюзии в кровеносном сосуде.
[0100] Таким образом, в одном варианте реализации настоящее изобретение охватывает способ прохождения через окклюзию в полости тела, включающий: (а) введение в указанную полость тела, содержащую указанную окклюзию, катетер, содержащий пружинный элемент, сверлильный компонент, и элемент натяжения; причем указанный пружинный элемент имеет ближний конец и дальний конец, указанный пружинный элемент прикреплен на своем ближнем конце к дальнему концу указанного катетера и прикреплен на своем дальнем конце к указанному сверлильному компоненту; причем указанный элемент натяжения имеет ближний конец и дальний конец, и указанный элемент натяжения прикреплен на своем дальнем конце к сверлильному компоненту, размещенному на указанном дальнем конце указанного пружинного элемента, и функционально соединен на своем ближнем конце с источником колебательной энергии, а указанный источник колебательной энергии выполнен с возможностью натяжения и высвобождения указанного элемента натяжения; (b) продвижение указанного катетера до тех пор, пока указанный сверлильный компонент не войдет в контакт с первой поверхностью указанной окклюзии; (с) выработку последовательности циклов натяжения и высвобождения посредством указанного источника колебательной энергии, достаточного для обеспечения вибрации указанного сверлильного компонента, причем указанная последовательность циклов натяжения и высвобождения имеет по меньшей мере одну частоту и по меньшей мере одну амплитуду; и (d) использование указанных колебаний указанного сверлильного компонента для проникновения через указанную первую поверхность указанной окклюзии. В другом варианте реализации настоящего изобретения способ дополнительно включает: (е) остановку указанной вибрации; (f) продвижение указанного катетера для вхождения в контакт с новой поверхностью указанной окклюзии; (g) повторение шагов (a)-(d), пока указанная новая поверхность указанной окклюзии не будет пройдена; и (h) повторение шагов (a)-(g) до полного прохождения указанной окклюзии.
[0101] Способ может дополнительно содержать шаг регулировки указанной по меньшей мере одной частоты и/или указанной по меньшей мере одной амплитуды колебаний посредством блока управления на основании твердости окклюзии. Согласно одной особенности указанный катетер содержит датчик, а указанная твердость окклюзии определяется посредством показаний указанного датчика. В другом варианте реализации настоящего изобретения способ дополнительно включает шаг регулировки указанной по меньшей мере одной частоты и/или указанной по меньшей мере одной амплитуды колебаний посредством блока управления на основании амплитуды колебаний указанного сверлильного компонента. Согласно одной особенности указанный катетер содержит датчик, и указанная амплитуда колебаний определяется посредством показаний указанного датчика. Согласно еще одной особенности любого из вышеупомянутых вариантов реализации указанная регулировка выполняется вручную. Согласно еще одной особенности любого из вышеупомянутых вариантов реализации указанная регулировка выполняется автоматически. Согласно одной особенности указанная полость тела представляет собой кровеносный сосуд.
[0102] Как очевидно из приведенного выше описания, устройство и система совместимы для использования с направляющими проволоками, которые полезны для направления катетера через полость тела, в частности для направления катетера через кровеносный сосуд. В известном уровне техники используют жесткие направляющие проволоки для восстановления просвета окклюзии кровеносного сосуда. В некоторых случаях врачи предпочитают использовать жесткую направляющую проволоку для проникновения через сосудистую окклюзию, но требуют дополнительные средства для реализации проникновения в случае особенно трудной окклюзии и, возможно, в случаях, вызывающих беспокойство относительно безопасности. Устройство и система по настоящему изобретению обеспечивают это дополнительное средство; устройство и система по настоящему изобретению совместимы с использованием жесткой направляющей проволоки в дополнение к системе из проволоки натяжения/пружинного элемента для проникновения через окклюзии кровеносного сосуда, включая полные хронические окклюзии. Соответственно, настоящее изобретение охватывает способ обработки хронической полной окклюзии в полости тела посредством дополнения описанного выше способа проникновения через окклюзию с использованием оконечности направляющей проволоки для проникновения через окклюзию. Таким образом, согласно одной особенности способа обработки окклюзии указанный катетер содержит жесткую направляющую проволоку, а указанный способ дополнительно включает продвижение указанной жесткой направляющей проволоки для проникновения через указанную поверхность указанной окклюзии посредством поочередной реализации шагов (с)-(d). Согласно другой особенности способ обработки окклюзии дополнительно включает продвижение указанной жесткой направляющей проволоки для проникновения через указанную поверхность указанной окклюзии поочередно с (с) выработкой последовательности циклов натяжения и высвобождения посредством указанного источника колебательной энергии, достаточных для обеспечения вибрации указанного сверлильного компонента, причем указанная последовательность циклов натяжения и высвобождения имеет по меньшей мере одну частоту и по меньшей мере одну амплитуду, а указанный сверлильный компонент размещен на дальнем конце указанного пружинного элемента; и (d) использованием указанных колебаний указанного сверлильного компонента для проникновения через указанную первую поверхность указанной окклюзии.
[0103] Для специалистов в данной области техники очевидно, что многие вариации, добавления, изменения и другие приложения могут быть выполнены относительно того, что было подробно показано и описано здесь посредством вариантов реализации, без выхода за рамки сущности или объема настоящего изобретения. Поэтому предполагается, что объем настоящего изобретения, определенный ниже пунктами формулы изобретения, включает все предполагаемые вариации, добавления, изменения или приложения.
Реферат
Группа изобретений относится к медицинской технике, а именно к энергоэффективному устройству и способу его использования для проникновения через полную окклюзию кровеносного сосуда во время чрескожного коронарного вмешательства или для улучшения доставляющей способности катетера во время чрескожной транслюминальной ангиопластики через частичную окклюзию кровеносного сосуда. Устройство для проникновения через окклюзию кровеносного сосуда содержит катетер, пружинный элемент, сверлильный компонент и элемент натяжения. Катетер имеет ближний конец и дальний конец. Пружинный элемент имеет ближний конец и дальний конец. Ближний конец пружинного элемента прикреплен к дальнему концу катетера. Пружинный элемент представляет собой пружину сжатия. Сверлильный компонент прилегает к дальнему концу пружинного элемента и функционально прикреплен к нему. Сверлильный компонент содержит пружину, имеющую по меньшей мере два плотно сжатых соседних витка, проходящих к самому дальнему концу устройства. Элемент натяжения размещен внутри катетера. Элемент натяжения имеет ближний конец и дальний конец. Дальний конец элемента натяжения прикреплен к дальней структуре, выбранной из группы, состоящей из пружинного элемента и сверлильного компонента. Система для проникновения через окклюзию кровеносного сосуда содержит вышеуказанное устройство и блок управления, выполненный с возможностью управления источником колебательной энергии. Предложен способ прохождения катетером через окклюзию сосуда, согласно которому: вводят в сосуд вышеуказанное устройство; размещают сверлильный компонент в контакте с окклюзией и генерируют от источника колебательной энергии последовательность усилий натяжения, воздействующих на элемент натяжения, тем самым вызывая колебания сверлильного компонента с амплитудой и частотой, достаточными для проникновения через окклюзию. Катетерная система содержит вышеуказанное устройство для проникновения через окклюзию кровеносного сосуда и проволочный направитель, проходящий сквозь просвет катетера упомянутого устройства. Изобретения обеспечивают эффективную передачу энергии к дальнему концу устройства посредством силы натяжения для проникновения через окклюзию с минимальными потерями энергии. 4 н. и 28 з.п. ф-лы, 6 ил.
Комментарии