Магнитный привод с ходовым якорем в виде постоянного магнита - RU2083013C1
Код документа: RU2083013C1
Чертежи







Описание
Изобретение относится к магнитному приводу для реле, контакторов и других устройств, применяемых в электротехнике.
Такой магнитный привод известен из патента Великобритания N 1068610.
Из известного уровня техники известны многочисленные магнитные приводы с якорем в виде постоянного магнита, который подвижен между двумя одноименными полюсами. Фундаментальные возможности видов простых магнитных целей этого рода практически исчерпаны этими приводами. Однако надежных и близких к практическим нуждам методов расчета, а также критериев конструктивного выполнения для этого почти нет и этот тип магнитного привода едва ли мог широко внедриться в практику до сих пор, не в последнюю очередь из-за механических недостатков и применения старых, слабых по магнитным свойствам магнитных материалов.
Из выложенной заявки ФРГ N 3426688 известен магнитный привод описанного выше рода с двумя цилиндрическими, соосно расположенными друг позади друга обмотками и якорем в виде постоянного магнита, который подвижен в середине отверстия обмоток в осевом направлении. Это устройство с двумя обмотками едва позволяет разместить на магнитном якоре рабочие устройства, потому что внутри отверстия обмоток недостаточно места. К тому же, вследствие неудачного положения якоря, он мог сильно нагреваться и терять за этот счет магнитные свойства постоянного магнита.
Из патента Великобритании N 1068610 известен магнитный привод, содержащий два внешних полюса электромагнитной системы, намагниченных однополярно, сердечник из магнитомягкого материала с обмоткой управления, расположенный между указанными внешними полюсами и намагниченный таким образом, что его полярность всегда противоположна полярности внешних полюсов, и по крайней мере один ходовой якорь, выполненный в виде постоянного магнита с полюсными наконечниками из магнитомягкого материала, сердечник по крайней мере с одной стороны выступают из обмотки управления, выступающая часть сердечника образует кольцевой полюс, в котором выполнено отверстие, ходовой якорь расположен соосно в указанном отверстии кольцевого полюса сердечника с возможностью перемещения между внешними полюсами электромагнитной системы. Это устройство обладает недостаточными механическими свойствами для применения в миниатюрных узлах.
В основе изобретения стоит задача создать новую простую форму магнитного привода с соответствующими конструктивными признаками, которая при высокой мощности, обусловленной неудачными механическими свойствами современных материалов для постоянных магнитов, будет пригодна для миниатюрных узлов с минимальной массой якоря и может применяться во многих областях техники.
Задача решается тем, что в магнитном приводе, содержащем два внешних полюса электромагнитной системы, намагниченных однополярно, сердечник из магнитомягкого материала с обмоткой управления, расположенный между указанными внешними полюсами и намагниченный таким образом, что его полярность всегда противоположна полярности внешних полюсов, и по крайней мере один ходовой якорь, выполненный в виде постоянного магнита с полюсами наконечниками из магнитомягкого материала, сердечник по крайней мере с одной стороны выступает из обмотки управления, выступающая часть сердечника образует кольцевой полюс, в котором выполнено отверстие, ходовой якорь расположен соосно в указанном отверстии кольцевого полюса сердечника с возможностью перемещения между внешними полюсами электромагнитной системы, согласно изобретению, постоянный магнит ходового якоря выполнен в виде диска из материала с остаточной магнитной индукцией 0,7 Т, при ВНмах равным по крайней мере 100 кДж/м3, причем высота диска в направлении его перемещения выбирается не более половины его диаметра.
В магнитном приводе согласно изобретению электромагнитные внешние полюсы могут быть снабжены по меньшей мере одной парой полюсов-упоров, причем число пар полюсов упоров соответствует числу ходовых якорей.
В магнитном приводе согласно изобретению по меньшей мере один конец третьего электромагнитного полюса, выступающий из обмотки управления, может быть выполнен по меньшей мере с одним отверстием, предназначенным для перемещения ходового якоря, и является кольцевым полюсом.
В магнитном приводе согласно изобретению полюсные наконечники постоянного магнита ходового якоря могут иметь одинаковые или разные размеры и форму, при этом форма указанных полюсных наконечников на сторонах, обращенных к полюсам-упорам, соответствует форме полюсов-упоров, а форма внешней поверхности указанных полюсных наконечников соответствует форме внутренней поверхности кольцевого полюса таким образом, что между полюсными наконечниками постоянного магнита, полюсами-упорами и кольцевым полюсом достигается минимальное магнитное сопротивление.
В магнитном приводе согласно изобретению по меньшей мере часть полюсных наконечников (4 и 4') может иметь диаметр больший, чем диаметр постоянного магнита.
В магнитном приводе согласно изобретению форма полюсных наконечников постоянного магнита и полюсов-упоров может быть выполнена конусообразной, а внутренняя поверхность кольцевого полюса имеет конусообразные участки.
Магнитный привод согласно изобретению может быть снабжен гильзой из тонкого немагнитного материала, установленной таким образом, что охватывает постоянный магнит и(или) полюсные наконечники.
В магнитном приводе согласно изобретению полюсы-упоры могут иметь цилиндрическую форму, гильза может быть расположена на указанных полюсах-упорах таким образом, что выполняет функцию механической направляющей или опоры относительно полюсов-упоров или кольцевого полюса.
В магнитном приводе согласно изобретению второй конец сердечника также выступает из обмотки управления, может быть выполнен по меньшей мере с одним отверстием, предназначенным для перемещения ходового якоря, и также образует второй кольцевой полюс, при этом сердечник может быть установлен между внешними полюсами электромагнитной системы таким образом, что по меньшей мере два ходовых якоря размещены в отверстиях кольцевых полюсов с возможностью взаимодействия с полюсами упорами электромагнитной системе, при помощи обмотки управления и/или под действием внешних сил.
В магнитном приводе согласно изобретению магнитный сердечник и кольцевой полюс электромагнитного полюса могут быть выполнены из уложенных друг на друга магнитомягких листов.
В магнитном приводе согласно изобретению управление возвратно-поступательными движениями ходового якоря может осуществляться электрическими импульсами чередующейся полярности.
В магнитном приводе согласно изобретению импульсов управление может осуществляться путем использования в качестве обмотки управления индуктивно-емкостной обмотки или подключения конденсатора последовательно обмотке управления.
В магнитном приводе согласно изобретению импульсное управление может осуществляться при помощи ходового якоря, связанного с механическим переключателем, или при помощи дистанционных датчиков расстояния.
Магнитный привод согласно изобретению может быть снабжен пружинами, расположенными между полюсами-упорами и/или кольцевым полюсом, с одной стороны, и ходовым якорем с гильзой или без нее, с другой стороны.
Магнитный привод согласно изобретению может быть снабжен упорными деталями из немагнитного материала, расположенными между полюсами наконечниками и полюсами-упорами или кольцевым полюсом.
Магнитный привод согласно изобретению при использовании для напорного насоса может быть снабжен цилиндрическим корпусом; ходовой якорь может быть снабжен уплотнительным элементом, установленным на одном из полюсных наконечников, с пружиной, расположенной на другом полюсном наконечнике; цилиндрический корпус может быть расположен между одним из полюсов-упоров и кольцевым полюсом, а ходовой якорь является напорным поршнем.
Магнитный привод согласно изобретению при использовании для напорного насоса двойного действия может быть снабжен двумя цилиндрическими корпусами, при этом оба полюсных наконечника ходового якоря могут быть снабжены уплотнительными элементами, цилиндрические корпуса могут быть установлены между полюсами-упорами и кольцевым полюсом, причем ходовой якорь является напорным поршнем.
В магнитном приводе согласно изобретению в качестве уплотнительных элементов поршня могут быть использованы мембраны или меха.
Магнитный привод согласно изобретению при использовании для клапанов с седлами может быть снабжен по меньшей мере одной клапанной камерой, напорными штуцерами и клапанными элементами, при этом клапанная камера герметично может быть установлена вокруг кольцевого полюса между полюсами-упорами, напорные штуцеры могут быть установлены на полюса-упорах, а клапанные элементы могут быть выполнены в полюсных наконечниках ходового якоря, являющегося телом клапана, причем ходовой якорь может быть расположен внутри тонкой гильзы из немагнитного материала, установленной с возможностью скольжения по полюсам-упорам и выполненной с проточными отверстиями.
Магнитный привод согласно изобретению при использовании для золотниковых клапанов может быть снабжен корпусом из немагнитного материала, выполненным в виде клапанного блока с проточными каналами и расположен так, что охватывает кольцевой полюс, а по меньшей мере один ходовой якорь может быть выполнен в виде золотника, полюсные наконечники которого снабжены выемками, предназначенными для управления потоком.
В магнитном приводе согласно изобретению гильза может быть выполнена с выступами для привода подвижных контактов.
Магнитный привод согласно изобретению может быть снабжен крепежным корпусом, предназначенным для размещения электрических контактов или блоков контактов.
В магнитном приводе согласно изобретению ходовой якорь может быть установлен таким образом, что его перемещение осуществляется поперек оси обмотки.
В магнитном приводе согласно изобретению полюсные наконечники могут быть выполнены с полостями.
В магнитном приводе согласно изобретению диаметр отверстия кольцевых полюсов может быть больше диаметра окружности полюсных наконечников ходового якоря.
В магнитном приводе согласно изобретению кольцевые полюса или магнитные сердечники путем опрыскивания немагнитным материалом могут быть объединены в многофункциональный блок, предназначенный в качестве направляющей для хода якоря, или в качестве каркаса обмотки, или в качестве крепежного корпуса для других функциональных элементов.
Магнитный привод согласно изобретению может быть снабжен короткозамкнутыми витками, расположенными вокруг одной или нескольких деталей из магнитного материала.
Магнитный привод согласно изобретению может быть снабжен пластинчатой пружиной, на которой закреплен ходовой якорь.
В магнитном приводе согласно изобретению пластинчатая пружина может быть расположена вдоль магнитного сердечника с возможностью упора в магнитный сердечник и крепежный корпус таким образом, что ее длина меняется в зависимости от положения ходового якоря.
На фиг. 1, a-d изображен магнитный привод в упрощенной форме с ходовым якорем в различных положениях и ход сил, воздействующих на якорь; на фиг. 2, a-e сечения кольцевого полюса (часть сердечника обмотки) вместе с постоянным магнитом, причем плоскость сечения перпендикулярна направлению движения якоря; на фиг. 3, a-d различные разрезы в плоскости ходовой оси, т.е. сечения в зоне полюсов и якоря; на фиг. 4-10 примеры воплощения изобретения, которые показывают, каким образом могут быть выполнены рабочие органы в полюсной области якоря с минимальными расходами и по возможности без добавочных деталей; на фиг. 11 пример схемы для использования магнитного привода в качестве вибромагнита при питании от цепи постоянного тока; на фиг. 12 форма исполнения магнитного привода с разделенной пополам обмоткой и несимметричным выполнением полюсной части; на фиг. 13 характеристики этого привода; на фиг. 14 вариант магнитного привода по фиг. 12 с внешним ярмом, расположенным лишь с одной стороны обмотки; на фиг. 15 пример воплощения магнитного привода по фиг. 12 или 14 для электромагнитных контакторов; на фиг. 16 вид сбоку для фиг. 15; на фиг. 17 расположение нескольких обмоток вокруг ходового якоря магнитного привода; на фиг. 18 форма исполнения магнитного привода с установленной внутри обмотки пластинчатой пружиной.
Согласно фиг. 1 магнитный привод имеет обмотку 1, которая намотана вокруг керна магнитного сердечника 2. Магнитный керн 2 из магнитомягкого материала заканчивается внизу уплощенной зоной, которая имеет проход и далее будет называться кольцевым полюсом Rp. Он выступает из обмотки и всегда имеет магнитную полярность нижней стороны обмотки. Внутри кольцевого полюса Rp расположен ходовой якорь, который может двигаться горизонтально, то есть поперек к оси обмотки. Ходовой якорь состоит из тонкого, в большинстве случаев дискообразного постоянного магнита 3, намагниченного вдоль оси, который находится между двумя выполненными из магнитомягкого материала полюсными наконечниками 4 и 4', которые всегда имеют полярность постоянного магнита 3. Как показано, полюсный наконечник 4 является всегда северным (N) полюсом магнита, а правый полюсный наконечник всегда является южным полюсом (S).
Постоянный магнит 3 состоит из высококачественного магнитного материала, как, например, самарий-кобальт, или железо-неодим-бор и должен в смысле изобретения иметь энергетическое произведение ВНмакс, по меньшей мере, 100 кДж/м3, при остаточной индукции Bн по меньшей мере 0,7 Т (при этом: B индукция; B статочная индукция; H коэрцитивная напряженность поля; K J/м3 Килоджоулей/метр3; релюктанц сопротивление магнитной цепи.
Высота постоянного магнита 3 ограничена максимум половиной его диаметра, применение менее качественных магнитных материалов приводит к существенному увеличению размеров и весов ходового якоря при уменьшении КПД, не говоря уже о двух недостатках. Это можно было бы объяснить необходимостью применения кольцевого полюса увеличенного размера, что приводит к увеличению количества "короткозамкнутых магнитных силовых линий" между также увеличенным полюсными-упорами или кольцевым полюсом.
Ходовой якорь 3 и 4 магнитно взаимодействует с кольцевым полюсом Rp и двумя магнитомягкими полюсами-упорами 5 и 5', которые всегда имеют полярность верхнего края обмотки, т.е. когда обмотка обтекается током эти полюса 5 и 5' принимают полярность, обратную полярности кольцевого полюса Rp. Чтобы это случилось, магнитная цепь от полюсов-упоров 5 и 5', на верхний конец керна 2 замыкается магнитномягким ярмом 6.
Для лучшего понимания изобретения магнитный керн 2 с кольцевым полюсом Rp заштрихован вертикальными линиями, а постоянный магнит 3 - горизонтальными. Полюсные наконечники 4 имеют сетчатую штриховку под 45o, полюса-упоры 5 сетчатую штриховку с горизонтальными и вертикальными линиями, а замыкающее ярмо 6 имеет простую штриховку под 45o.
Части магнитно не участвующие в работе и значит, состоящие из немагнитных материалов, которые, например, имеются на эскизах применений (как части рабочего устройства) показаны в разрезе как области с точечной штриховкой, или сплошной заливкой черным цветом.
Фиг. 1, а-с показывают, для лучшего понимания магнитных процессов при движении ходового якоря в якорь в трех его положениях; слева или справа в устойчивом положении у упоров и в середине в неустойчивом положении перехода. Ходовой якорь 3 и 4 может двигаться между двумя крайними положениями, у полюсов-упоров 5. Расстояние между полюсами-упорами 5 и 5' за вычетом длины якоря дают величину хода, которая на фиг. 1, d в увеличенном масштабе показана, как расстояние между левой и правой вертикальными осями.
По этим осям отложены силы в соответствующих положениях упора пропорционально высоте. Если сила пропорциональна высоте над осью абсцисс, то можно получить кривые изменения сил по положению якоря.
Если обмотка 1 обтекается током (фиг. 1, а), то на кольцевом полюсе Rp керна магнита 2 возникает южный магнитный полюс, а у верхней стороны обмотки 1 северный полюс, который переходит на боковые полюса-упоры 5 и 5'.
Ходовой якорь 3 и 4 движется
вправо под действием силы, зависящий от силы тока и положения якоря, кривая изменения силы показана
характеристикой AK-r на фиг. 1, d (пунктир). Эта сила является результирующей четырех составляющих
f1-f4, возникающим между электромагнитными полюсами (кольцевым полюсом Rp и полюсами-упорами 5 и 5') и полюсами постоянного магнита 4 и 4'. Эти силы, показанные на
фиг. 2, b (вероятно 1, b, прим. перев.) таковы:
f1 сила притяжения между полюсом
4' якоря (южный) и правым полюсом-упором 5'(северный);
f2 сила отталкивания
между полюсом 4' якоря (южный) и кольцевым полюсом Rp (южный);
f3 сила
притяжения полюсом якоря 4 (северный) и кольцевым полюсом Rp (южный);
f4 сила отталкивания между левым полюсом-упором 5 (северный) и полюсом якоря 4 (северный).
Сложность формирования этих сил (здесь изображены упрощенно) затрудняет, с одной стороны, расчет магнитного привода, однако дает возможность посредством соответствующего конструктивного оформления всех полюсных наконечников ход этих сил согласовать с применением, как это станет ясно из дальнейшего описания.
Если изменить направление протекания тока, то изменится полярность кольцевого полюса Rp и соответственно полюсов-упоров 5 и 5' и значит направление и характер сил, обозначенных f1-f4. Вместо притяжения теперь возникнут силы отталкивания и наоборот. Из правого положения у упора (фиг. 1, с) теперь ходовой якорь 3 и 4 передвинется влево. Силы воздействия AK-1 и AK-r имеют ход, зависящий от тока, положения якоря и скорости его движения.
Если ток прервать, то ходовой якорь 3 и 4 остается в том
положении, которого он достиг последний раз при перемещении, и пристает к соответствующему полюсу-упору 5 или 5'
c силой, которая определяется силовыми линиями постоянного магнита 3. Эта сила состоит
в основном из двух компонентов (см. фиг. 1, с):
h1 между полюсом-упором 5' и полюсным
наконечником 4' ходового якоря 3 и 4 и
h2, которая возникает между
полюсным наконечником 4 и кольцевым полюсом Rp.
Начиная с северного полюса постоянного магнита 3, магнитная цепь замыкается через полюсный наконечник 4, кольцевой полюс Rp, керн сердечника 2, ярмо 6, полюс-упор 5, полюсный наконечник 4' и обратно к постоянному магниту 3.
Эта сила с максимальным значением Hm при перекрытом воздушном зазоре между полюсом-упором 5' и полюсным наконечником 4', полюсным наконечником 4 и кольцевым полюсом Rp, быстро уменьшается при увеличении этих воздушных зазоров, что соответствует перемещению якоря влево по кривой, примерно следующей кривой HK-r. То же самое справедливо для левого положения якоря, причем удерживающая сила имеет ход кривой HK-1. Здесь магнитная цепь замыкается через левую половину ярма 6.
Описанный магнитный привод может иметь широкое применение, потому что он позволяет развивать большие усилия в обе стороны, причем расход энергии (импульсного характера) очень мал. Малая масса ходового якоря позволяет этот привод использовать в виброрежиме с колеблющимся магнитом (например, в насосах, электробритвах.), причем управление идет от переменного тока. При работе от источника постоянного тока магнитное усилие при достижении конечного положения может реверсироваться изменением направления тока, в простейшем случае с помощью контактов. Расположение ходового якоря сбоку от обмотки позволяет якорь прямо связать с рабочим устройством (контактами, насосом или элементами клапана, гидроцилиндром, дисковым сцеплением) и выполнять компактные функциональные узлы. При виброрежиме избегают разогрева находящегося сбоку рабочего устройства. Оформление магнитных и механических действующих частей и их исполнение (интегральное или из нескольких частей) производят соответственно критериям, которые дают приоритет магнитным свойствам для получения характеристики нужного хода. Это однако должно учитывать механико-технологические особенности случая применения, что в большинстве случаев приводит к нежелательному разделению магнитных цепей. Примеры исполнения изобретения показывают, как достигать оптимума при этих противоречивых предпосылках. Магнитный керн 2, ярмо 6 и полюса-упоры 5 выполняют из магнитомягкого материала с достаточной проницаемостью, для чего среди прочего хорошо подходят обычные сорта сталей. Для вибромагнитов или привода с высокой скоростью реакции рекомендуется пластинчатое оформление или применение содержащих кремний магнито-мягких сталей, которые имеют большее электрическое сопротивление. Фиг. 2 показывает сечения перпендикулярно направлению движения ходового якоря 3 для кольцевых полюсов магнитных кернов 2, причем на фиг. 2, е показан керн 2 с тремя зонами кольцевых полюсов (Rp 1-3), что соответствует приводу с тремя ходовыми якорями. Видно, что проходы в керне имеют форму сечения ходовых якорей постоянных магнитов 3 или полюсных наконечников 4, так что, с учетом необходимых по технологии воздушных зазоров, получается максимально экономичная передача магнитных силовых линий между ходовым якорем 3 и 4 и кольцевым полюсом Rp. Высота кольцевого полюса Rp и ход сечения в направлении движения ходового якоря выбирают так, чтобы оптимизировать переход магнитных силовых линий, как это показано на фиг. 3, a-d. Обращенные к ходовому якорю 3 и 4 поверхности кольцевого полюса соответственно форме ходового якоря бывают плоскими и цилиндрическими (фиг. 3, a), могут также иметь форму, показанную на фиг. 3, b, частично с косыми поверхностями, если это соответствует форме внешних поверхностей полюсных наконечников 4 и 4'. Полюсные наконечники 4 и 4' изготовляют из магнитомягкого материала и контактируют с постоянным магнитом 3, они являются таким образом удлиненными магнитными полюсами и могут за счет соответствующего согласования выполнять и механические задания в качестве поршней, тел клапанов и т.п. Полюсные наконечники 4 и 4' из дешевой легкообрабатываемой стали дополняют ходовой якорь 3 и 4 и позволяют, с одной стороны, выполнить постоянный магнит 3 простым и с малыми размерами, а с другой стороны, получить достаточно больше расстояние между кольцевым полюсом Rp и полюсами-упорами 5 и 5', чтобы уменьшить прямое замыкание магнитных силовых линий между ними (Rp, 5 и 5'). Расширенное (фиг. 3, a) или конусообразное (фиг. 3, b) выполнение полюсных наконечников 4 и 4', с одной стороны, нацелено на полный перехват магнитных силовых линий между полюсами электромагнита (Rp, 5 и 5'), а с другой стороны, эффективная площадь полюсов увеличивается, чтобы снизить потери в воздушных зазорах. По функционально-экономическим соображениям не всегда можно оптимально выполнить привод с точки зрения магнитной цепи, поэтому иногда выбирают менее эффективные с точки зрения магнитной цепи полюса, как, например, показано на фиг. 3, с. Чтобы можно было с левой стороны диаметр ходового якоря иметь малого диаметра, здесь был выбран цилиндрический полюсный наконечник 4, который имеет конусное углубление. За счет этого полюсный наконечник получается меньшего веса, а обращенная к полюсу-упору 5 площадь больше.
Полюсный наконечник 4' имеет обращенную к полюсу-упору 5' большую, перпендикулярную направлению движения якоря поверхность, допускающую оптимальное силовое воздействие.
Так, где простота важнее оптимального КПД, могут выбираться формы полюсных
наконечников 4 и 4' как на фиг. 3, d (цилиндрические), которые
при необходимости за счет различной длины могут иметь различный ход характеристик при движении вправо и влево. Для оформления полюсных
поверхностей, обращенных к воздушным зазорам, справедливо
известные из магнитной техники соображения, например,
увеличенные плоские полюсные поверхности как на фиг. 3, a, как правило, ведут
при том же ходе к увеличенным силам в начале движения,
т.е. к более плоским (горизонтальным) кривым AK (фиг. 1, d) и более высокому КПД;
увеличение поверхности полюсов за счет конусной формы,
как на фиг. 3, b, позволяет при том же начальном
усилии получить увеличенную длину хода, однако уменьшает усилие в конце хода, т.е. дает очень плоские характеристики.
В зависимости от цели применения привода могут выбираться различные формы и размеры полюсных наконечников 4 и 4', которые могут быть различными для северного и южного полюсов.
Фиг. 3, b показывает оптимизированную форму полюсных наконечников в смысле веса и КПД. Полюсные наконечники 4 и 4' на внутренней или внешней стороне имеют особо большую площадь при малой толщине стенок, т.е. малом весе и позволяют за счет косых поверхностей получить сравнительно большую длину хода якоря и слегка нарастающую характеристику силы.
Такая конструкция, как на фиг. 3, a, рекомендуется для привода насосов и компрессоров, замковых устройств, открывающихся дверей, магнитных контакторов, золотниковых клапанов, или в качестве пропорциональных магнитов. Полюса-упоры 5 и 5' имеют форму, согласованную с формой полюсных наконечников 4 и 4', как видно на фиг. 3, и они расположены соосно с осью ходового якоря 3 и 4. Так как полюса-упоры 5 и 5' и ярмо 6 имеют похожие магнитные свойства, то в некоторых случаях можно выполнять их из одного куска материала, и полюса являются удлиненными концами ярма. Для хорошей работы магнитного привода необходимо максимально точное позиционирование полюсов электромагнита кольцевого полюса Rp и полюсов-упоров 5 и 5'. Это позиционирование может осуществляться с помощью немагнитного (например, из пластмассы или отлитой под давлением детали из немагнитного сплава) крепежного корпуса 10, который укреплен на керне 2 непосредственно позади кольцевого полюса Rp и образует кратчайшее механическое соединение между кольцевым полюсом Rp и полюсами-упорами 5 и 5' (см. например, примечания, начиная с фиг. 4). Полюса-упоры 5 и 5' укреплены на этом корпусе 10, который также является направляющей скольжения для ходового якоря 3 и 4, или служит в качестве держателя остальных частей рабочего устройства. Крепежный корпус 10 может таким образом быть оформлен независимо от магнитных цепей и быть выполненным "по требованиям заказчика" как показывают примеры применения. Этот крепежный корпус позволяет демонтаж ярма 6 и обмотки 1 без разборки области полюсных наконечников. Каркас для намотки обмотки 1 может быть также выполнен в виде удлинения крепежного корпуса 10.
Если рассмотреть фиг. 1, b, и учесть тенденцию действия каждого магнита в смысле притяжения магнитомягких деталей и приставания к ним, то возникает необходимость иметь механическую направляющую для ходового якоря 3 и 4, так как в противном случае он будет отклоняться от своего нормального горизонтального положения и тереться о стенки кольцевого полюса (заштрихованы), что может помешать нормальному функционированию. Обычным для магнитных приводов является использование в качестве направляющей тонкого штока или штанги, которая здесь была бы пропущена сквозь постоянный магнит 3, полюсные наконечники 4 и полюса-упоры 5. В качестве материала здесь годится нержавеющая сталь (немагнитная) или другие дорогие сплавы. Магнит 3 при этом должен иметь канал, поэтому становится дороже и имеет меньшую площадь сечения. Этих недостатков можно избежать, если ходовой якорь 3 и 4 направлять вместе с его полюсными наконечниками 4 в направляющей гильзе 7 по внешней окружности, что устраняет необходимость сверления постоянного магнита 3. Эта гильза 7 может простираться за пределы якоря и надвигаться со скольжением на полюса-упоры 5 (фиг. 3, d), по окружности которых выходит лишь немного магнитных силовых линий. С помощью такой направляющей устраняется трение скольжения внутри кольцевого полюса, где в результате перехода магнитного поля могут собраться намагниченные частички. В результате применения такой длинной по сравнению с диаметром гильзы из немагнитного материала (металл или пластмасса), предотвращается наклон якоря при перемещении. Гильза 7 может нести элементы рабочего устройства или относительно полюсных наконечников 5 она может быть уплотнена, образуя цилиндр, причем полюс-упор действует как неподвижный поршень. В зависимости от случая применения гильза 7 может быть сплошной или состоять из отдельных частей и может быть согласована с приводимым устройством. Фиг. 4 и 5 показывают, в частности оформление области между ходовым якорем, кольцевым полюсом и полюсами-упорами, которые пригодны для различных применений. Фиг. 4 показывает магнитный привод по фиг. 3, c, на котором укреплены механические элементы поршневого насоса. Вокруг полюса-упора 5 укреплен крепежный корпус 10, который для полюсного наконечника 4 служит компрессионным цилиндром. Чтобы выполнить свою роль полюсный наконечник 4 имеет уплотнительное кольцо 8. Полюс-упор 5 служит дном цилиндра для полости 9 и может иметь каналы 0, 0', на которых могут быть установлены (не показанные) клапаны. Полюсный наконечник 4' имеет осевой канал, в котором размещена немагнитная пружина 13, которая во время движения якоря вправо накапливает энергию, сжимаясь, и возвращает ее при движении якоря влево (работа сжатия), как полезное усилие. Эта форма исполнения с односторонним пружинным подкреплением является простой и годится для средних давлений или соответственно, величины хода якоря.
Фиг. 5 показывает пример применения привода по фиг. 3, b в качестве насоса двойного действия для меньших давлений и больших расходов. Особо легкий ходовой якорь 3 и 4 несет по краям воронкообразных полюсных наконечников 4 и 4' уплотнительные кольца 11, которые, например, состоят из тефлоновой смеси. Они одновременно служат в качестве направляющих в крепежном корпусе-цилиндре сжатия 10, который простирается над полюсами-упорами 5 и 5', замыкающими цилиндр 10, причем отверстия 0 при необходимости оборудуются клапанами в полюсах-упорах 5 и 5' или в стенках цилиндра, или в полюсных наконечниках 4 и 4'. Фиг. 6 показывает разрез магнитного привода с двумя ходовыми якорями, которые размещены по обе стороны от обмотки, причем магнитный керн 2 имеет две зоны кольцевых полюсов, как на фиг. 2, e. Для простоты здесь показано лишь одно срединное сверление в нижней части кольцевого полюса Rp. Замыкающее ярмо 6 простирается теперь по нижним 5 и 5' и верхним 51 и 5'1 полюсам-упорам и соединяют их через магнитомягкий участок ярма с минимально возможным релюктанцем. Для ясности фиг. Участок ярма, соединяющий боковые полюса-упоры 5 и 5' и 51 и 5'1 с малым магнитным сопротивлением, изображен внизу, на практике, однако, выгоднее располагать его сбоку от обмотки. Верхний ходовой якорь 31 и 41 намагничен противоположно нижнему, т. е. с южным полюсом влево. Управляющий импульс достаточной силы, в связи с двумя воздушными зазорами между полюсами-упорами 5 и 51 и полюсными наконечниками 4 и 41, который на верхнем кольцевом полюсе Rp1 создает полярность южную, а на нижнем - северную. Это приведет к тому, что оба ходовых якоря двинутся влево до упора с полюсами-упорами 5 и 51. Движение вправо происходит при подаче управляющего импульса противоположной полярности. В случае, если верхний ходовой якорь оборудован более сильным магнитом 31, движение нижнего ходового якоря 3 и 4 может быть получено также за счет механического перемещения верхнего якоря 31 и 41 в ту же сторону. Подходящая для начала движения полярность нижних полюсов-упоров 5 и 5', как описано на стр. 3 и 4, будет тогда задаваться от верхнего ходового якоря.
Магнитная цепь этого рода может
иметь много
применений, например:
в качестве магнитного привода с двумя рабочими якорями;
в качестве магнитного привода с невидимым, например, закрытым в камере клапана рабочим
якорем; причем
второй ходовой якорь приводит в действие индикацию положения рабочего якоря;
в качестве магнитного привода с несколькими пространственно разделенными ходовыми якорями, с
аварийным ручным
приводом в действии и индикацией положения, причем более сильный, большой и доступный для ручного привода ходовой якорь с функцией индикации положения может вместо обмотки давать
магнитное поле для
движения остальных рабочих якорей.
Фиг. 7 показывает магнитную цепь, подобную цепи фиг. 6, с двумя ходовыми якорями 3 и 4 и 31 и 41, которые на этот раз намагничены в одинаковом направлении (северные полюса слева) и которая по действию подобна с той лишь разницей, что при электрическом управлении ходовые якори движутся в противоположном направлениях.
Как показано на фиг. 2, e, имеется возможность несколько ходовых якорей 3 и 4 расположить по одну сторону от обмотки 1, которые движутся параллельно и намагничены в одну или разные стороны. При одинаково направленной полярности с точки зрения магнетизма оба находящиеся рядом ходовые якоря ведут себя как один, однако они могут двигаться в отдельных полостях или средах, например, жидкостях.
Фиг. 8 показывает разрез через зоны полюсов работающего в качестве магнитного клапана привода с двумя соседними, намагниченными в противоположном направлении ходовыми якорями, которые соответствуют плоскости сечения A A' на фиг. 2, e. Ходовые якоря с постоянными магнитами 3 (внизу) или 31 (вверху) и полюсными наконечниками 4 и 4' и 41 и 4'1 имеют клапанные конуса 14, которые погружены в полюсные наконечники. Полюса-упоры 5 и 5' имеют против полюсных наконечников 4 и 4' и 41 и 4'1 полюсные выступы с напорными трубопроводами P и P1 и сливными отверстиями R и S, которые могут поочередно запираться клапанными конусами 14 в зависимости от положения ходовых якорей 3, 4 и 31, 41. Полюса-упоры 5 и 5' могут быть также выполнены из нескольких частей и имеют хорошее магнитное соединение с ярмом 6. Ходовые якоря 3, 4 и 31, 41 находятся в направляющих гильзах 7 и 71, которые имеют скользящую посадку и отверстия 0, через которые поток жидкости (показан стрелками) может попасть в камеры клапанов 15 и 151. Ходовые якоря 3, 4 и 31, 41 вместе с направляющими гильзами 7 и 11 (д.б. 71, прим. перев.) и клапанные конуса 14 служат здесь элементами клапанов и движутся внутри двух прхоодов кольцевого полюса Rp. Камеры клапанов 15 и 151, которые созданы вокруг элементов клапанов и между полюсами-упорами 5 имеют немагнитные герметичные стенки камер 10, например, из металла, эпоксидной смолы или пластмассы, которые также служат как крепежные корпуса. Они разделяют друг от друга камеры вокруг клапанных элементов и соединены с трубопроводами, которые, например, идут к пневмоцилиндру двойного действия 17.
Если трубопроводы Р, P1 полюса-упора 5 соединены с источником сжатого воздуха (стравливающие трубопроводы R и S выходят в атмосферу), то сжатый воздух попадает через отверстия с верхнего элемента клапана через камеру клапана 151 попадает на рабочий штуцер B и через трубопроводы в верхнюю полость пневмоцилиндра 17 и гонит его в поршень вниз. Нижняя полость цилиндра 17 через трубопровод в нижний части соединяется с атмосферой. Если клапан переключают, то оба ходовых якоря меняют свое положение почти одновременно; открываются отверстия Р и S, а открытые ранее отверстия P1 и R запираются. Сжатый воздух попадает по рабочему штуцеру A под поршень пневмоцилиндра 17, и поршень его теперь движется вверх, так как камера над поршнем может разрядиться в атмосферу через выход S. Описанный пример воплощения таким образом показывает простую конструкцию с одной единственной обмоткой блока из двух трех/двухходовых клапанов, с тремя направлениями и двумя положениями, которые выполняют функции клапана типа пять/два, т.е. пригоден для управления пневмоцилиндром двойного действия.
В зависимости от потребности, магнитный привод позволяет также реализовать другие комбинации отдельных или нескольких трех/двухходовых клапанов с индикацией положения или без нее или с аварийным ручным приводом в действие. Это ясно, если пример воплощения фиг. 8 сравнить с фиг. 2, e. В принципе, возможно вокруг каждого размещающего ходовой якорь канала кольцевого полюса Rp выполнить камеру клапана. Ходовой якорь 3 и 4 получает направляющую гильзу 7 и клапанный конус 14 и становится таким образом запорным элементом. Он может запирать поток газа через отверстия, которые могут быть выполнены в полюсе-упоре 5.
Если такие устройства дают функциональные преимущества, то можно также один, два или несколько трех/двухходовых клапанов расположить с одной или обеих сторон обмотки, см. фиг. 2, e.
Фиг. 9 показывает пример воплощения изобретения в качестве золотникового клапана, который отличается чрезвычайно малой массой тела клапана. Ходовой якорь 3 и 4 служит телом клапана, причем применена простирающаяся над полюсными наконечниками 4 и 4' немагнитная гильза 7, которая держит вместе части 3 и 4, и, соответственно обработанная, служит в качестве золотникового тела клапана. Как и в обычных золотниковых клапанах, тело клапана 3, 4 и 7 соединяет рабочие магистрали A и B, напорную магистраль P, или же рабочие магистрали соединяют со сливными отверстиями R и S. Эти трубопроводы выполнены в крепежном корпусе-клапанном блоке. 10. Он состоит, например, из немагнитной стали и окружает зону кольцевого полюса Rp магнитного керна 2, которая заделывается, например, твердой пайкой. Клапанный блок 10 вместе с кольцевым полюсом затем обрабатывается с нужной точностью изнутри и снаружи. Горизонтальный канал, в котором с минимальным люфтом должен скользить золотник 3, 4 и 7, с боков закрывается полюсами-упорами 5 и 5', которые соответственно концам полюсных наконечников 4 и 4' выполнены конусными, чтобы магнитная характеристика привода была плоской (с постоянной силой действия, мало меняющейся при перемещении, (прим. перев.). Если к штуцеру P подключать источник давления (масла), а к рабочим штуцерам A и B подключать гидроцилиндр, то, как уже было описано для фиг. 8, с помощью этого клапана можно управлять движением поршня. Движение золотника 3, 4 и 7 вправо приводят к тому, что прерывается сообщение между штуцерами B и A или B и S (Д.б.Р и A, B и S, прим. перев. ). При этом появятся соединения между штуцерами P-B и A-P. Если, например, для гидравлики высокого давления потребуется увеличение силы на золотнике, то магнитный привод увеличенной мощности может перемещать несколько золотников меньших по диаметру и находящихся вне магнитного якоря. Они могли бы работать, например, внутри соответственно выполненных полюсов-упоров 5.
Фиг. 10 показывает пример воплощения изобретения в качестве блока сцепления-торможения, причем соосные части, такие, как полюса-упоры 5 и ходовой якорь 3 и 4 принадлежат к одной системе, свободной для вращения, являющейся цепочкой привода. Ходовой якорь 3 и 4 находится во вращающейся, относительно полюсов-упоров 5, гильзе 7, которая простирается на полюса-упоры цилиндрическими выступами, служащими подшипниками. На правом конце гильза 7 несет фрикционный диск 19 с возможно меньшим моментом инерции. Этот диск может, как показано, приводиться от диска сцепления 20, который связан по вращению с полюсом- упором 5', являющимся ведущим валом. Вращение ведущего вала 5' в показанном положении ходового якоря 3 и 4 через диски 20 и 29 передаются на гильзу 7 или ходовой якорь 3 и 4. Вращательное движение может передаваться дальше осью из немагнитного материала 21, которая жестко по вращению укреплена в полюсном наконечнике 4. Альтернативно вращение может передаваться с помощью установленной на гильзе 7 звездочки 22 для зубчатого ремня 23, вместо привода через ось 21. Если нужно торможение ведомого вала, то ходовой якорь 3 и 4 вместе с гильзой 7, элементами привода 21 и 22 и фрикционным диском 19 перемещаются влево, пока диск не затормозится, контактируя с тормозным диском (д.б. 24, прим. перев.). Магнитные силовые линии от ярма 6 входят в полюс-упор 5', являющийся ведущим валом, например, через чашку подшипника 25, которая в этом случае состоит из магнитномягкой пористой спеченной (из порошка, прим. перев.) стали.
Вследствие того, что в обоих конечных положениях магнитная сила возрастает, и вследствие больших удерживающих сил, привод особенно пригоден для применения в реле и магнитных контакторах, где желательны повышенные контактные давления. Характеристика магнитного привода (фиг. 1, d) очень похожа на характеристику сил в контакте на переключение. Компактный переключатель получают посредством установки контактов или контактных групп вблизи ходового якоря 3 и 4 привода, показанного на фиг. 4, a или 3, d.
Контакты или контактные пружины, могут прямо приводиться в действие гильзой ходового якоря 7, которая целесообразно выполняется из пластмассы, и боковых выступов, типа приводящего в действие гребешка как в гребенчатых реле.
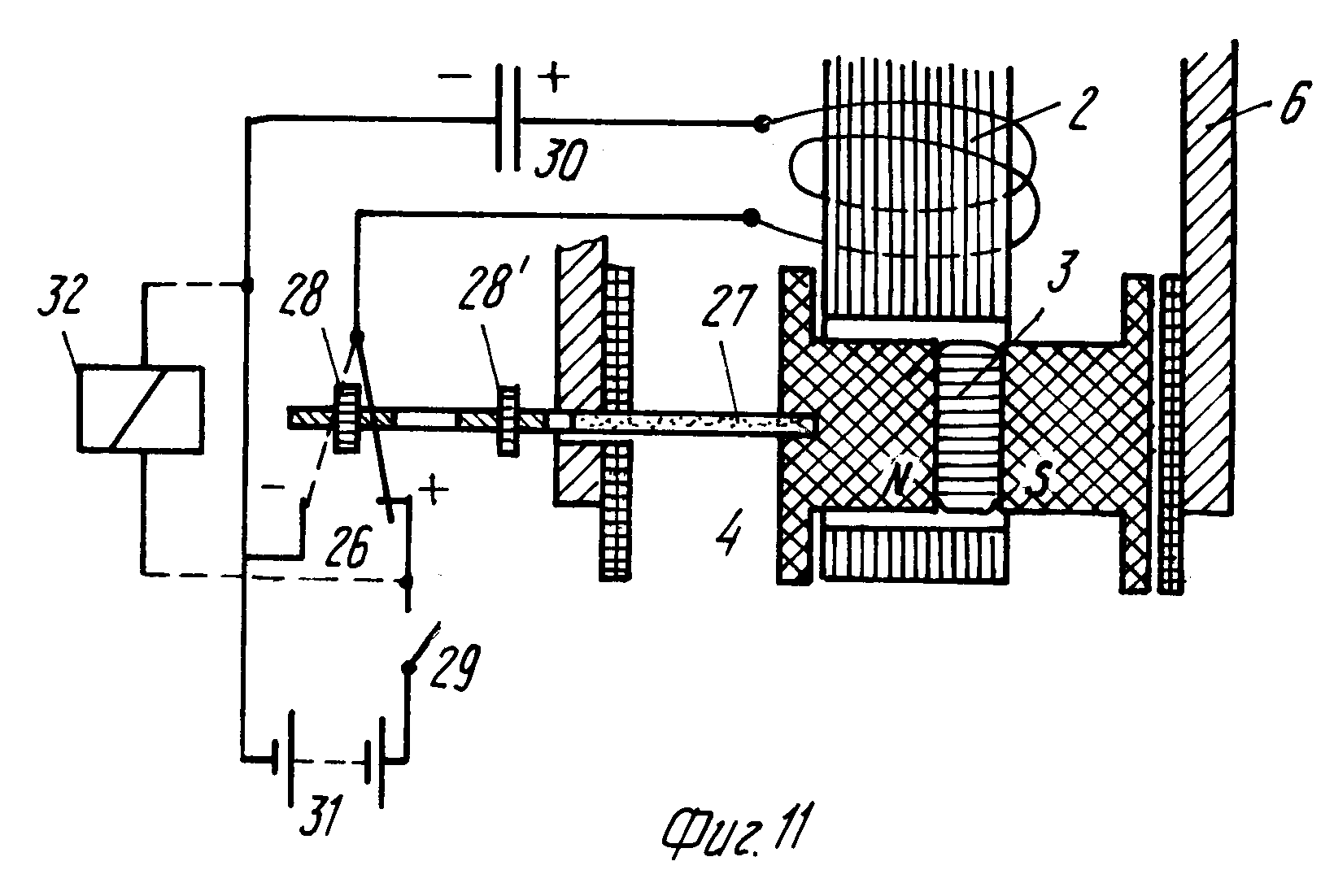
Магнитный привод может также использоваться в качестве вибропривода - вибромагнита причем ходовой якорь лишь кратковременно достигает положений упора, т.е. контактирует, или приближается к полюсу-упору 5. Виброрежим может быть получен при запитке обмотки переменным током или прямоугольными, пилообразными или трапециевидными импульсами переменной полярности. Включение этих импульсов целесообразно производить в зависимости от положения ходового якоря 3 и 4. Проще всего это осуществить через контакты крайних положений, как, например, показано на фиг. 11 с конденсаторной импульсной схемой. Подвижный контакт переключателя с двумя устойчивыми положениями 26 соединен с началом обмотки 1 и может переключаться с помощью штока 27 с полюсового (справа) на минусовой (слева) контакт и обратно. На штоке 27 имеющем резьбу, находятся две установочные гайки 28, с помощью которых можно точно съюстировать моменты переключения переключателя 26. Если ходовой якорь 3 и 4 движется влево, то он перемещает жестко связанный с полюсным наконечником 4 шток 27 влево. Правая установочная гайка 28' перемещает ламель переключателя 26 влево (с + на -) лишь когда якорь 3 и 4 почти достигает левого упора на полюсе-упоре 5. Переключение в первоначальное положение /с на + происходит незадолго до достижения правого положения ходового якоря 3 и 4 полюса-упора 5' с помощью установочной гайки 28.
Принцип работы магнитного привода с ходовым якорем в виде постоянного магнита, используемого в качестве вибропривода, согласно изобретению заключается в следующем.
Ходовой якорь 3 и 4 вместе с переключателем 26 находится в показанном правом положении. При замыкании управляющего переключателя 29 обмотка 1 запитывается током, который имеет направление от переключающего контакта 26 к конденсатору 30. Этот ток вызывает движение ходового якоря 3 и 4 влево и одновременно заряжает конденсатор 30. Импульс тока заканчивается, если переключатель (наверное, переключатель, прим. перев.) 26 перескочит в левое положение (-). К этому моменту времени конденсатор 30 уже или почти заряжен, так что размыкание правого контакта (+) проходит почти без тока. Замыкание левого (-) контакта вызывает теперь то, что ток от плюса конденсатора 30 течет к переключающему контакту, то-есть в обратном направлении. Конденсатор разряжается и ходовой якорь 3 и 4 возвращается в исходное положение. Перед самым достижением правого полюса-упора 5' переключатель 26 переключается снова на плюсовой контакт, и описанный цикл работы повторяется; таким образом устанавливается вибрационный режим работы привода. Потребление тока в этом режиме особенно малое, потому что энергия от батареи 31 забирается только при движении якоря в одном направлении. Срок службы контактов высок, так как их размыкание производится практически без тока (с малым искрообразованием). Вместо комбинации конденсатор 30 плюс обмотка 1 в этом магнитном приводе, как упоминалось, может использоваться запасающая энергию индуктивно-емкостная обмотка.
Получение импульсов для срабатывания возможно другими известными способами (крестовой переключатель, обмотка со средним отводом и т.д.), однако в большинстве случаев это сложнее.
Вместо механического переключателя 26 (фиг. 11) могут использоваться бесконтактные датчики, такие, как датчик приближения, зонд Холла, фотореле и т. п. которые управляют электронным генератором импульсов. Достижение конечных положений ходового якоря 3 и 4 у полюсов-упоров 5 и 5' можно определить с помощью одной или нескольких добавочных обмоток и использовать для получения управляющих импульсов. При достижении положения упора в магнитной цепи (керн 2, ярмо 6 и полюса-упоры 5) возникает сильное изменение магнитного поля, которое в обмотке, окружающей одну из этих частей, вызывает появление характерного пика напряжения с высокой крутизной фронта, который может быть привлечен для управления переключающими импульсами.
Приведенные примеры воплощения служат лишь для того, чтобы дать конкретные указания по возможному конструктивному исполнению. Специалист может, например, решить вместо поршневых насосов использовать мембранные или поршне-мембранные насосы. Он может между полюсными наконечниками 4 и полюсами-упорами 5 предусмотреть немагнитные вставки (например, упругие пластинки для уменьшения шума).
Как показано на фиг. 1, где слева, т.е. на полюсе-упоре 5 предусмотрена пластинка для создания воздушного зазора, такие вставки за счет ограничения хода якоря снижают как иногда нежелательное нарастание силы притяжения AK-1, так и удерживающей силы HK-1. Если против силы AK-1, например, действует пружина (FK, см. характеристику), которая преодолевает уменьшенную теперь удерживающую силу HKx пружины, то в обеспеченном состоянии обмотки ходовой якорь 3 и 4 будет оттеснен обратно вправо. Поведение магнитного привода механически становится с одним устойчивым состоянием. Если необходим режим работы с одним состоянием, то можно получить его при сохранении всех преимуществ привода посредством целенаправленного управления схемой с емкостным накоплением энергии, как показано на фиг. 11. В этом случае переключатель 26 должен быть с одним устойчивым положением, и управляться не от ходового якоря, а от подачи внешнего напряжения, например, на обмотку реле 32 (с показанными пунктиром соединениями). Перед подачей напряжения выключателем 29 переключатель 26 находится в левом положении (на минусе). При подаче напряжения возбуждается обмотка реле и переключатель 26 переходит направо (на плюс). На обмотку 1 идет ток и ходовой якорь 3 и 4 движется влево, причем конденсатор 30 заряжается и остается под напряжением. При размыкании выключателя 29, переключатель 26 отпадает в первоначальное положение (влево, на минус), а конденсатор 30 разряжается через обмотку 1, в результате чего ходовой якорь возвращается в первоначальное положение (вправо).
Включение/выключение напряжения с помощью выключателя 29 управляет приводом в режиме с одним устойчивым состоянием, причем обмотка 1 лишь кратковременно проводит ток, что дает экономию электроэнергии. Подобные схемы, как известно из релейной техники, легко реализуются электронными средствами. Изобретение, таким образом, позволяет с малым механическим усложнением реализацию широкой палитры электромеханических продуктов, причем проявляются существенные преимущества, такие, как экономия электроэнергии, малый вес ходового якоря, управляемость в двух направлениях, изменение поведения путем изменения внешней схемы, малые размеры, и т.д.
Ниже рассматриваются варианты, относящиеся к специальным конструкциям магнитных приводов, которые расширяют описанные выше примеры воплощения, особенно в части работы с одним устойчивым состоянием. В этих вариантах получают магнитный привод, для практических случаев сохраняются признаки, такие как ходовой якорь в виде постоянного магнита, который всегда содержит плоский магнит высокой интенсивности и скользит внутри охватывающего его кольцевого полюса. Имеется возможность осуществить привод с двумя устойчивыми состояниями за счет внешних схемных элементов сделать приводом с одним устойчивым состоянием.
Далее будут показаны варианты выполнения полюсной части, которые так изменяют характеристики привода, чтобы позволить механически получить работу с одним устойчивым положением. Кроме того, описывается, как приспособить магнитный привод к различным имеющимся в распоряжении объемам устройства путем разделения обмотки, с повышением энергетического КПД.
Для тех же и эквивалентных частей конструкции используются те же позиционные номера, что и ранее.
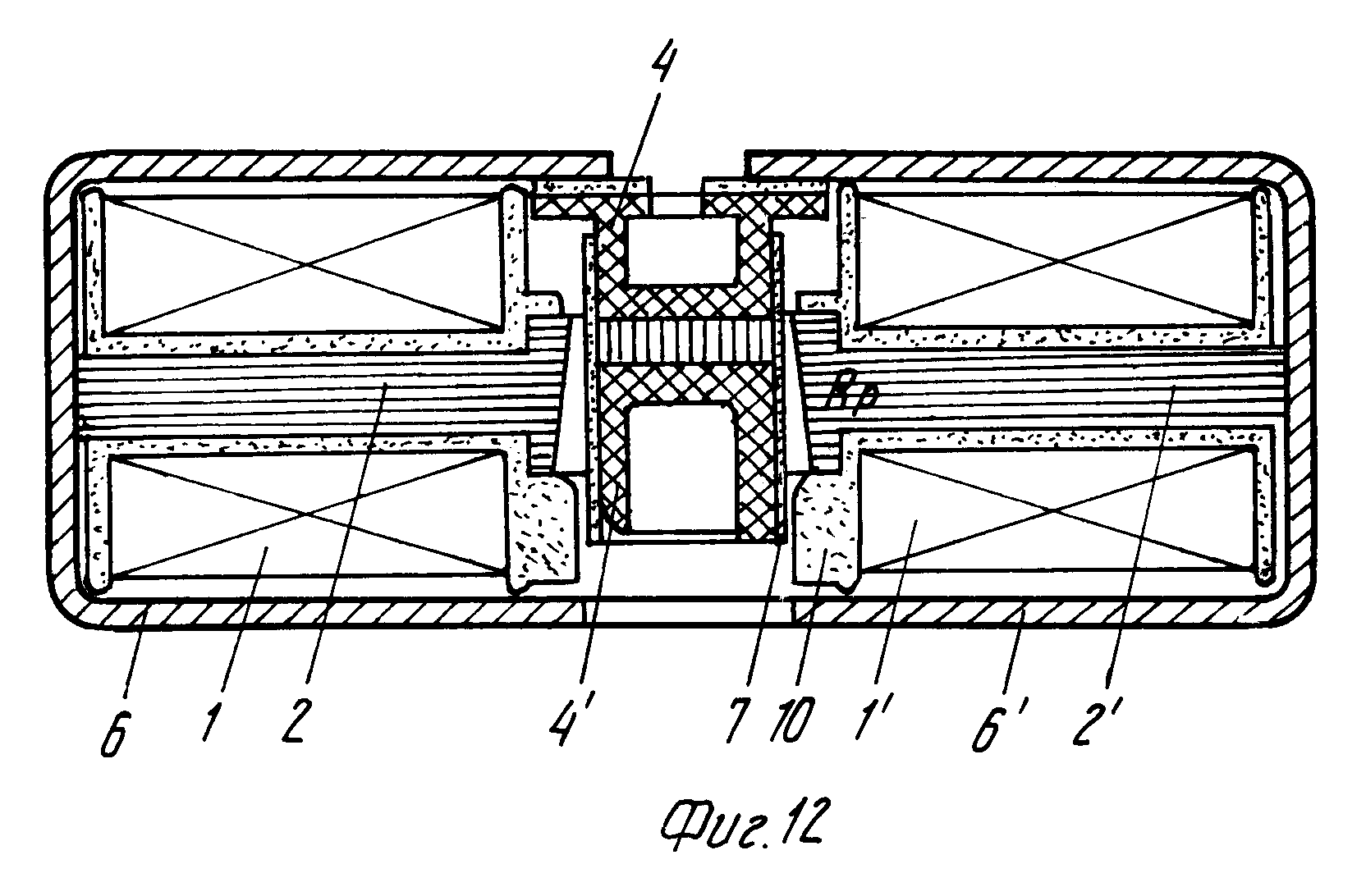
Магнитный привод по фиг. 12 имеет две обмотки 1 и 1' и соответственно два магнитных керна 2 и 2' и два внешних ярма 6 и 6', каждый из которых имеет половинное сечение по сравнению с сечением, когда применяется одна обмотка. Обмотки намотаны так, что при обтекании их током к кольцевому полюсу Rp всегда повернута одинаковая полярность электромагнита, например, южная. Поэтому с точки зрения магнитной цепи обе обмотки работают как одна обмотка увеличенного размера, однако с более высоким энергетическим КПД (ампервитков на ватт) при том же объеме.
При этом же сечении обмотки или объеме, в котором можно разместить n витков обмотки, которые обтекаются током 1, разделение на две отдельные обмотки позволяет использовать меньшее напряжение (мощность), потому что две катушки, каждая длины L, на каждой из которых намотано по n/2 витков имеют меньше привода (меньшее сопротивление), чем одна обмотка с такой же длиной L и с n витками, которые имеют увеличенную среднюю длину витка. Разделенный на два участка магнитный керн 2 также позволяет уменьшить среднюю длину витка.
Магнит высокой интенсивности 3 на основе редкоземельных металлов находится между полюсными наконечниками 4 и 4', которые, насколько это позволяет минимальное сечение магнитопровода, выполняются полыми, чтобы снизить вес якоря. Немагнитная гильза 7 центрует части 3 и 4 ходового якоря и может служить механической направляющей. Полюсный наконечник 4, Т-образно расширенный за пределами кольцевого полюса Rp, дает слабо возрастающую кривую силы притяжения AK (фиг. 13). Для той же цели, или для изменения характеристики для работы с одним устойчивым состоянием служит форма полюсного наконечника 4', закругленного с нижней стороны, который может погружаться в высверленное отверстие, выполненное с нижней стороны внешнего ярма 6. Таким образом, в этой области нет фронтального упора между полюсным наконечником 4' и ярмом 6, что, как известно, дало бы высокую силу притяжения, зависящую от хода якоря.
В зависимости от потребности изменения характеристики силы притяжения, полюсная область 4', 6 и 6' может иметь и другую форму, как, например, с цилиндрическим или коническим выступом прохода в нижней части внешнего ярма 6, как, например, на фиг. 15 и 16 (наверное, 14, 15 и 16, прим. перев.). Фиг. 13 показывает принципиальный ход электромагнитной силы притяжения AK для заданного направления тока, или удерживающей силы постоянного магнита Pк для магнитного привода по фиг. 12. Вертикальная ось соответствует ходу ходового якоря (от показанного положения вниз). На левой стороне нанесены силы, направленные вниз (-), а на правой стороне силы, направленные вверх (+), которые осуществляют возврат якоря. При механическом режиме с одним устойчивым положением магнитного привода сам ходовой якорь на основе действия постоянного магнита должен самостоятельно возвращаться. При возбуждении обмотки электромагнитная сила притяжения достигает величины A, которая выбрана выше, чем сила приводимого устройства, и она приводит к тому, что ходовой якорь 3 и 4 и 4' перемещается вниз, причем сила, согласно кривой Ак, увеличивается, пока не будет достигнуто нижнее положение якоря E. Если на якорь не действуют внешние силы, он, после прерывания тока, согласно кривой Рк, останется в этом приставшем положении, потому что сила постоянного магнита Pк (пунктир) в этом положении является отрицательной. Сам по себе магнитный привод в этом случае является бистабильным (с двумя устойчивыми положениями). В случае, если на якорь действует внешняя сила, направленная вверх (+) вспомогательная пружина, реакция приводимого устройства, то против действия силы Pк якорь будет сдвинут вверх, пройдет точку опрокидывания силы U, затем его движение вверх уже будет поддерживаться положительной составляющей силы Pк. С малым возвращающим усилием (преодолевающим отрицательную часть сил Pк) магнитный привод имеет, таким образом, одно устойчивое положение.
Посредством конструктивных мероприятий возможно так далеко вниз опустить точку опрокидывания U, что и сам по себе магнитный привод будет моностабильным (имеющим одно устойчивое состояние), т. е. силы постоянного магнита всегда имеют положительный знак. Работу с одним устойчивым положением можно достичь увеличением или изменением формы воздушного зазора между полюсным наконечником 4 и кольцевым полюсом Rp, или за счет оформления нижнего полюсного наконечника 4' и ярма 6, или за счет конусообразного открытого вниз выполнения кольцевого полюса Rp, в особенности на его нижней стороне, или за счет вырезов в кольцевом полюсе, как это, например, показано на фиг. 14. С учетом важных для магнитного действия признаков все магнитомягкие детали 2, Rp, 4, 6 конструктивно могут разделяться на несколько частей и собираться вместе.
С точки зрения изготовления, имеет смысл магнитные керны 2 вместе с кольцевым полюсом Rp окружать электроизоляционным материалом, например, опрыскивать термопластичной пластмассой или эпоксидной смолой и т.п. которая является механической направляющей для якоря и изготавливается за одну операцию.
Образованный посредством опрыскивания пластмассой пластмассовый блок 10 одновременно может служить каркасом для обеих частей обмотки 1 и 1', и на нем могут быть также выполнены электрические выводы, механическая направляющая для ходового якоря, которые, например, верхней или нижней стороной скользит по пластмассовому корпусу 10, а также может определять расстояние (воздушный зазор) между верхней стороной полюсного наконечника 4 или кольцевым полюсом Rp.
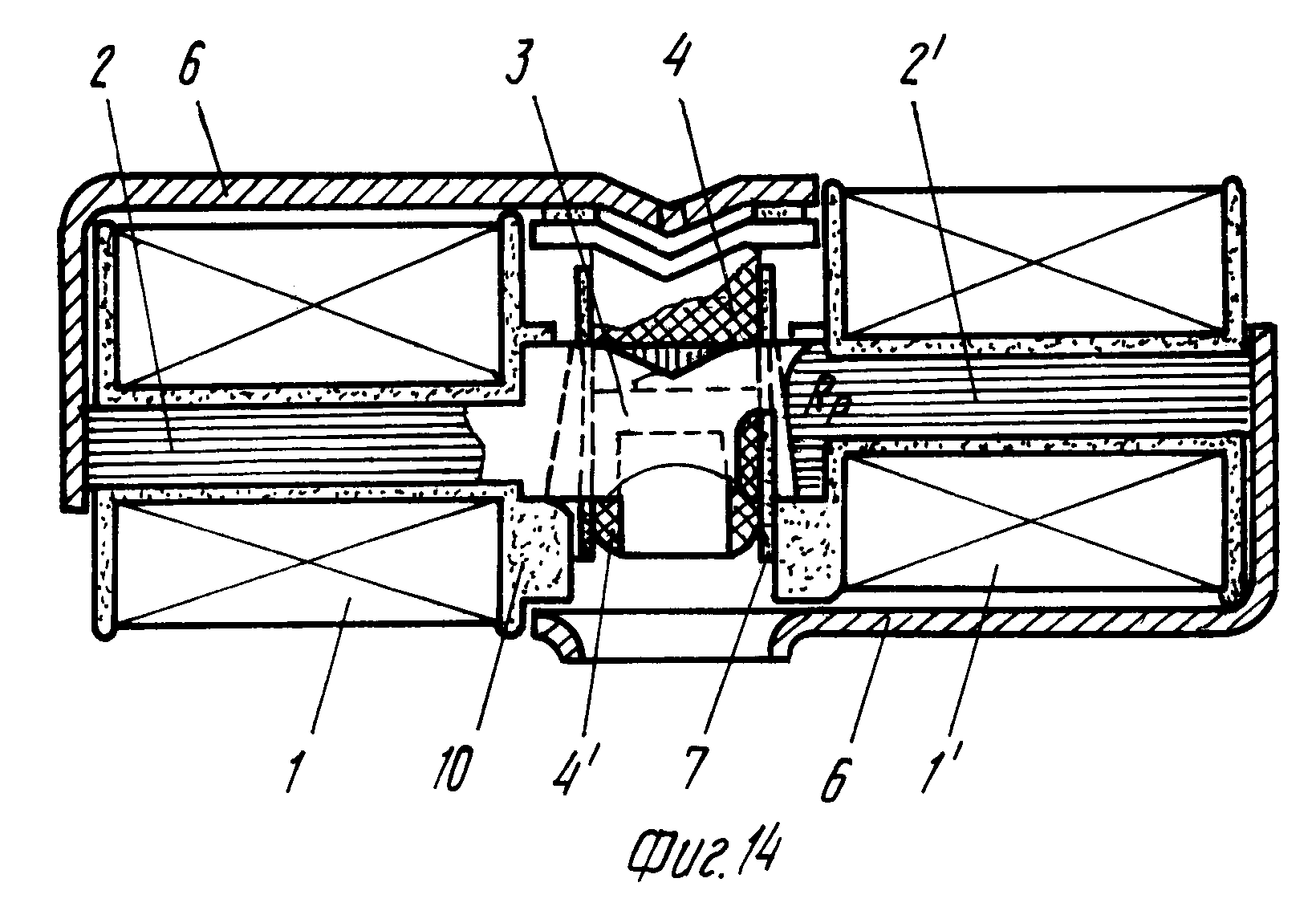
Фиг. 14 схематично показывает магнитный привод, который по сравнению с показанным на фиг. 12 на стороне каждой обмотки имеет внешнее ярмо 6 лишь с одной боковой стенкой. Это ярмо простирается над областью полюсов ходового якоря 3 и 4, так что ярмо 6 левой обмотки служит верхним внешним полюсом, а правой обмотки 6 служит нижним внешним полюсом. При этом магнитные цепи левой или правой обмоток независимы друг от друга. Это имеет преимущество в том, что можно использовать желаемую несимметричную запитку током двух частей обмотки для улучшения динамических свойств привода.
Если две обмотки, например, включены последовательно, и параллельно правой обмотке включен конденсатор, то приложенное к обмоткам напряжение приведет к тому, что ток в левой части обмотки в момент включения кратковременно будет иметь большую величину, чем в правой, что противодействует приставлению верхнего полюсного наконечника 4 к ярму 6 и облегчает таким образом начало движения.
Подобное этому, в большинстве случаев, менее выраженное кратковременное смещение магнитного поля в воздушном зазоре над или под кольцевым полюсом Rp можно также получать с помощью короткозамкнутых обмоток в соответствующих местах магнитопровода, например, на ярме 6, что можно делать и с другими магнитными цепями, как, например, по фиг. 12.
С целью влияния на характеристики магнитные цепи типа фиг. 14 могут также использовать различные параметры частей обмоток, что ведет к тому, что ампервитки для обеих частей всегда будут различными.
Фиг. 14 кроме того, показывает другую форму полюсов вблизи якоря. Кольцевой полюс Rp (который здесь не показан в разрезе) не имеет постоянной высоты, а имеет плавные вырезы, всегда симметричные, причем вверху V-образные, а внизу в форме сегмента круга. Этим преследуют цель, чтобы проход (при движении якоря) края кольцевого полюса Rp краем полюсного наконечника якоря (постоянного магнита 3) происходил не одновременно по всей окружности кольцевого полюса. При одновременном переходе иногда получаются неравномерности (изломы) на характеристике силы притяжения. Так как теперь окружность кольцевого полюса при вырезах уже не лежит в одной плоскости, то такие неравномерности и изломы можно устранить или сгладить. Такой форме полюсов Rp также соответствует форма полюсного наконечника 4, широкая сторона которого также V-образная, а также и находящееся над ним удлинение внешнего ярма 6. Эти мероприятия могут также применяться и в других примерах применения главной заявки.
Вследствие существования нескольких воздушных зазоров специалист также имеет возможность, за счет придания им соответствующей формы и размера, изменять форму характеристики притяжения как на участке начала ходя якоря, так и в середине и конце, причем в более широких пределах, чем в известных магнитных приводах.
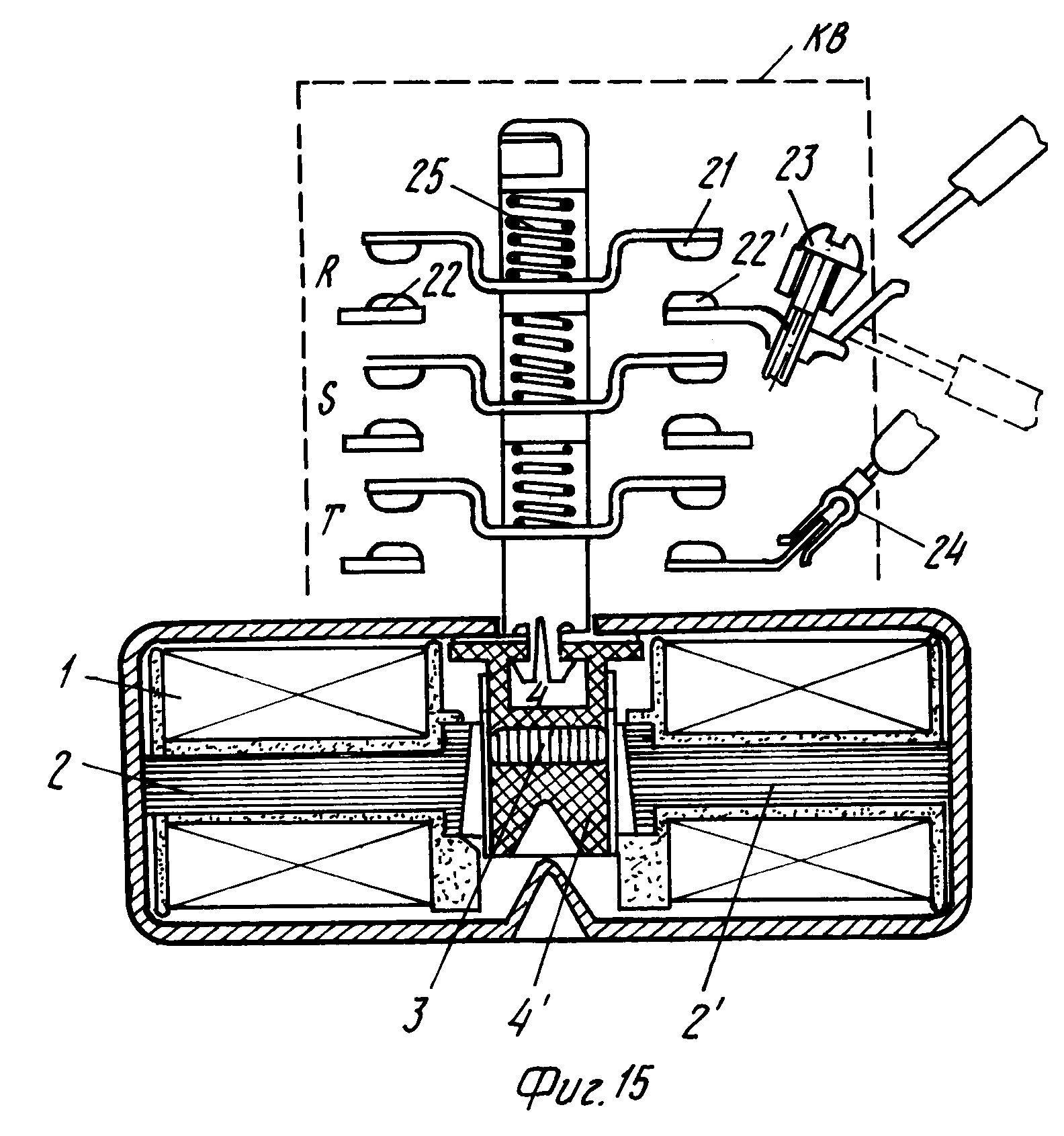
За счет среднего положения ходового якоря магнитные приводы по фиг. 12 и 14 особенно хороши для магнитных контакторов и позволяют контакторы создать с меньшим конструктивным размером при более высокой плотности упаковки на крепежной шине. Фиг. 15 и 16 показывают выгодное пространственное расположение малого контактора с магнитным приводом по фиг. 12, который здесь в нижней полюсной области имеет полюсный наконечник 4' в виде полого конуса. Ходовой якорь 3 и 4 прямо приводит расположенные по вертикальной оси симметрии подвижные контакты 21, которые принадлежат контактному блоку KB. К неподвижным контактам 22 и 22' подключены, например, жилы фаз трехфазной сети с помощью винтовых клемм 23 или штекерных клемм 24. Фиг. 16 показывает разрез этого контактора. В случае миниконтактора в наиболее применяемом диапазоне мощностей, до, примерно, 6 кВт ширина привода B составляет примерно 25 мм. Вертикальное расположение контактов с шириной примерно 12 мм на блок контактов позволило рядом со смещенным от оси симметрии главным контактным блоком поставить вспомогательный контактный блок или другие вспомогательные устройства. Прижимыне пружины 25 подвижных контактов 21 могут осуществлять, если магнитный привод имеет характеристику, показанную на фиг. 13, перевод привода в режим одного устойчивого положения. В обесточенном состоянии катушки реакции пружин 25 помогает подъему ходового якоря 3 и 4, то-есть преодолению отрицательной ветви характеристики сил постоянного магнита Pк.
Фиг. 17 показывает вид сверху с частичными разрезами магнитного привода, подобного показанному на фиг. 12 и 14, который вместо двух имеет теперь четыре ориентированных в одном направлении обмотки, керны которых (со всегда одинаковой полярностью) снаружи соединены с внешним ярмом 6, а внутри с кольцевым полюсом Rp. Окружность кольцевого полюса, а также один или оба полюсных наконечника 4 выполнены четырехугольными и в большинстве случаев одинакового размера. У кольцевого полюса Rp выполнены или укреплены четыре керна обмоток 2, которые несут обмотки 1. Ходовой якорь с постоянным магнитом 3 и полюсными наконечниками 4 расположены перпендикулярно плоскости эскиза и подвижен межу кольцевым полюсом Rp и ярмом 6. Он магнитно взаимодействует с этими частями, которые могут иметь одну из форм, описанных выше.
Кольцевой полюс Rp может также и здесь быть покрытым пластмассой, нанесенной опрыскиванием, чтобы образовать механическую направляемую для ходового якоря. Из этой пластмассовой оболочки могут быть выполнены перемычки S, которые идут параллельно оси ходового якоря и служат направляющими для плоской части полюсного наконечника 4.
Четыре или несколько обмоток могут, например, быть расположены также крестообразно или звездообразно, причем окружность кольцевого полюса могла бы быть квадратной. Это дало бы симметричное распределение магнитного потока, а также возможность четыре обмотки прямо намотать на крестообразный керн с кольцевым полюсом, однако это ведет к увеличению габаритов привода. В зависимости от располагаемого места или величины хода якоря, можно иметь две или больше обмоток с осью, перпендикулярной к плоскости кольцевого полюса Rp, т.е. параллельно направлению хода якоря. Наличие нескольких обмоток позволяет их по желанию включать параллельно или последовательно и таким образом позволяет одному приводу работать от различных напряжений питания.
Фиг. 18 показывает магнитный привод, в особенности для реле, ходовой якорь которых направляется пластинчатой пружиной. Пластинчатая пружина 31 выполнена из немагнитного пружинного материала и расположена вдоль магнитного керна 2, охвачена крепежным корпусом 19 (одновременно каркасом обмотки) и так опирается на один из этих предметов, что действующая упругая длина пружины изменяется в зависимости от положения ходового якоря 3 и 4. Этот признак может сознательно использоваться для того, чтобы согласовать характеристику привода с требованиями к приводному устройству, например, за счет накопления силы получить одно устойчивое положение. Крепежный корпус 10, одновременно являющийся каркасом обмотки, пронизывается магнитным керном 2, имеющим кольцевой полюс Rp. Пружина 31, которая может иметь переменную ширину, на своем левом конце, например, соединяется с магнитным керном 2, крепежным корпусом 10 или с внешним ярмом 6.
Реферат
Использование: область электротехники. Сущность изобретения: магнитный привод, содержит два внешних полюса электромагнитной системы, намагниченны однополярно, сердечник из магнитомягкого материала с обмоткой управления, расположенной между указанными внешними полюсами и намагничен таким образом, что его полярность всегда противоположна полярности внешних полюсов. Привод содержит также по крайней мере один ходовой якорь, выполненный в виде постоянного магнита с полюсными наконечниками их магнитомягкого материала. Сердечник по крайней мере с одной стороны выступает из обмотки управления. Выступающая часть сердечника образует кольцевой полюс, в котором выполнено отверстие. Ходовой якорь расположен соосно в указанном отверстии кольцевого полюса сердечника с возможностью перемещения между внешними полюсамм электромагнитной системы. Согласно изобретению постоянный магнит ходового якоря выполнен в виде диска из материала с остаточной магнитной индукцией 0,7 Т, при ВНмакс равным по крайней мере 100 кДж/м2, причем высота диска в направлении его перемещения выбирается не более половины его диаметра. 28 з.п. ф-лы, 18 ил.
Комментарии