Управление крутящим моментом при торможении - RU2484004C2
Код документа: RU2484004C2
Чертежи


Описание
УРОВЕНЬ ТЕХНИКИ
[0001] Подъемные системы широко используются. Подъемные системы используют для перевозки пассажиров, например, между различными уровнями внутри здания. Типичная подъемная система включает устройство, содержащее двигатель и тормоз для управления движением и положением кабины подъемника с целью обеспечения необходимой эксплуатации подъемника.
[0002] Тормоз используется для удерживания указанной кабины в требуемом положении при ее остановке на лестничной площадке. Известны различные способы управления для разблокировки или подъема тормоза.
[0003] Известно, например, предварительное приложение крутящего момента к двигателю указанного устройства перед разблокировкой тормоза во избежание толчков и рывков кабины при начале движения подъемника. Нагрузка на кабину подъемника изменяется по мере того, например, как пассажиры входят в указанную кабину и выходят из нее. Вследствие этого возможен выход кабины подъемника из равновесия с противовесом перед тем, как указанная кабина начнет движение от лестничной площадки. Любое нарушение равновесия может стать причиной движения указанной кабины в вертикальном направлении независимо от движения двигателя, когда тормоз отпущен. Внутри кабины пассажиры ощущают это в виде легкого толчка или рывка.
[0004] Известны способы предварительного приложения крутящего момента к двигателю подъемного устройства во избежание любых нежелательных перемещений кабины в начале движения. Один такой способ описан в патенте США №4995478. Обычно такие способы построены на определении пассажирской нагрузки на кабину подъемника. Известны недостатки таких способов. Другой способ описан в патенте США №6318505. В указанном способе использован тормоз, который прикладывается непосредственно к направляющей и отличается от тормоза устройства.
[0005] Специалисты постоянно работают над созданием усовершенствований. Одним из усовершенствований является способ управления величиной крутящего момента тормоза устройства подъемника вне зависимости от измерения нагрузки на соответствующую кабину подъемника.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Тормозное устройство согласно одному из примеров содержит тормозной элемент, выполненный с возможностью приложения тормозной силы с целью сопротивления повороту соответствующего компонента. Кроме того, указанное тормозное устройство содержит монтажный элемент, выполненный с возможностью прикрепления указанного тормозного устройства к неподвижной поверхности. Указанный монтажный элемент по меньшей мере частично перемещается относительно указанной неподвижной поверхности под действием крутящего момента указанного тормозного устройства. Кроме того, указанное тормозное устройство содержит датчик, который обеспечивает индикацию силы, соответствующей любому перемещению указанного монтажного элемента относительно указанной неподвижной поверхности под действием крутящего момента.
[0007] Подъемное устройство согласно одному из примеров содержит корпус. Указанный корпус по меньшей мере частично поддерживает двигатель. Указанный двигатель выборочно поворачивает канатоведущий шкив. Повороту указанного канатоведущего шкива выборочно сопротивляется тормозной элемент. К указанному корпусу с возможностью частично перемещаться относительно корпуса под действием крутящего момента указанного тормозного элемента, обусловленного сопротивлением указанного тормозного элемента повороту указанного канатоведущего шкива, прикреплен монтажный элемент. Индикация силы, соответствующая перемещению указанного монтажного элемента относительно указанного корпуса, обеспечивается датчиком.
[0008] Способ контроля тормоза согласно одному из примеров включает регистрацию силы, которая вынуждает тормозной монтажный элемент перемещаться относительно соответствующей неподвижной поверхности. Определяют, находится ли зарегистрированная сила в пределах диапазона, соответствующего допустимой величине крутящего момента указанного тормоза. Осуществляют индикацию по меньшей мере того, что указанная сила находится вне пределов указанного диапазона.
[0009] В нижеследующем описании представлены особенности и преимущества настоящего изобретения, очевидные для специалиста. Ниже представлены чертежи, сопровождающие подробное описание настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00010] На Фиг.1 схематически показаны части подъемной системы, в том числе тормозное устройство, в соответствии с одним из вариантов реализации настоящего изобретения.
[00011] На Фиг.2 показан перспективный вид тормозного устройства согласно одному из примеров.
[00012] На Фиг.3 показан перспективный вид с местным разрезом выборочных частей тормозного устройства, показанного на Фиг.2.
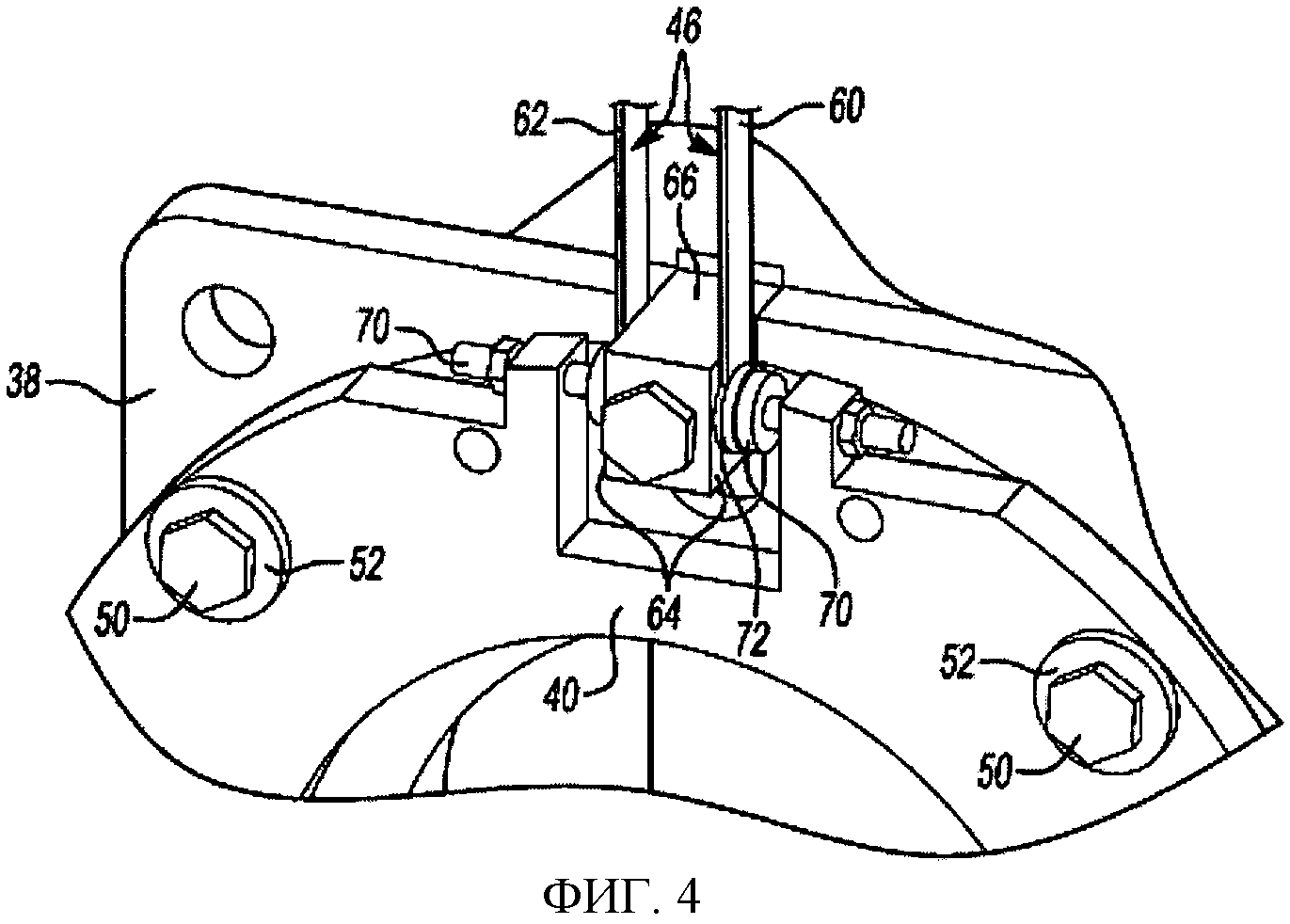
[00013] На Фиг.4 показан перспективный вид выборочных частей тормозного устройства, показанного на Фиг.2.
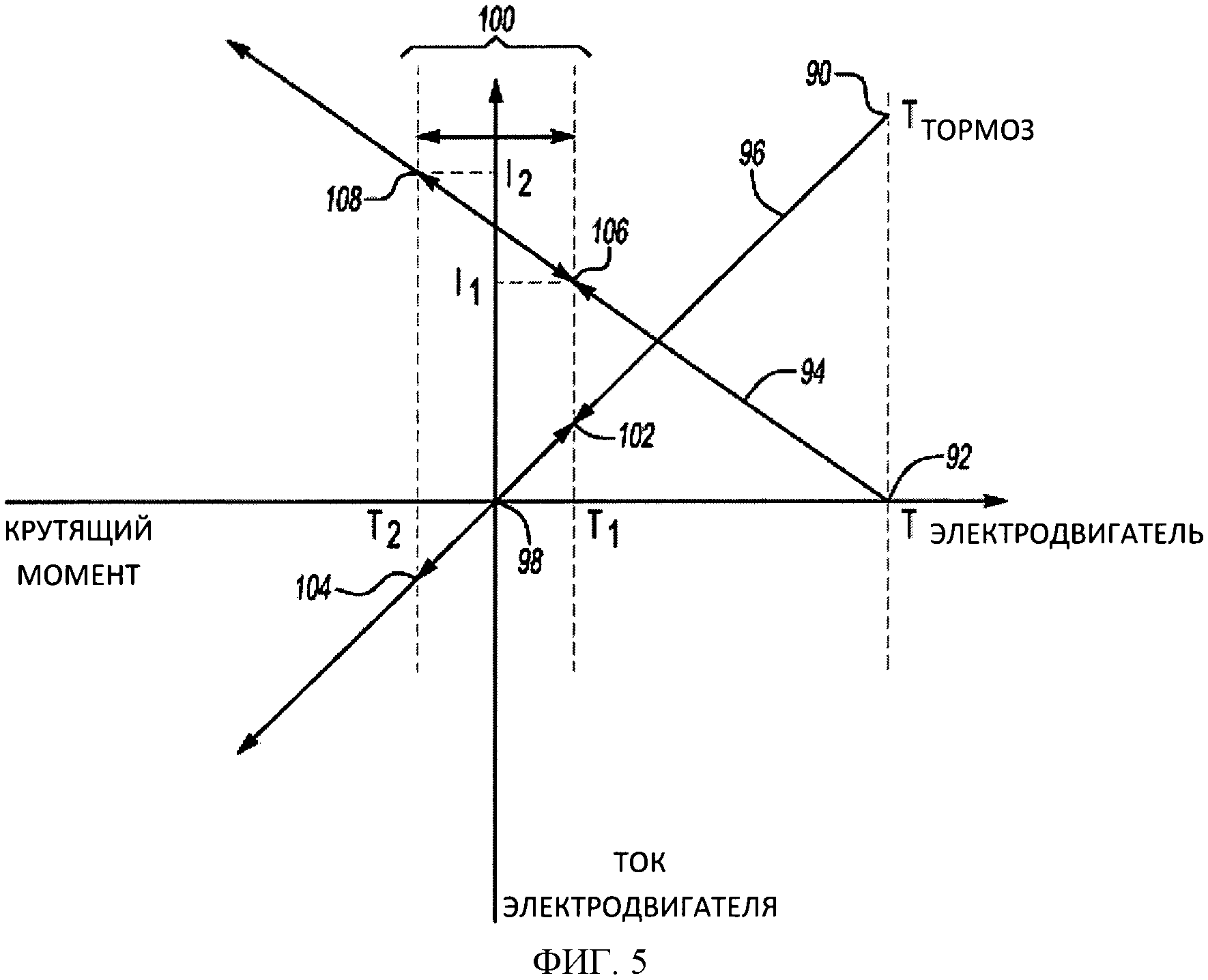
[00014] На Фиг.5 графически показан пример алгоритма управления.
ПОДРОБНОЕ ОПИСАНИЕ
[00015] Функции контроля тормозного момента и управления им используют, например, в подъемной системе. В настоящем описании подъемная система использована в пояснительных целях. Функции контроля тормозного момента и управления им не обязательно ограничены контекстом настоящего описания.
[00016] На Фиг.1 схематически показаны части подъемной системы 20 согласно одному из примеров. Кабина 22 лифта соединена с противовесом 24. Кабина 22 лифта и противовес 24 подвешены на тросах 26, которые перемещаются при перемещении канатоведущего шкива 28 для обеспечения требуемого перемещения кабины 22 лифта.
[00017] Для управления движением канатоведущего шкива 28 предусмотрено устройство 30. Устройство 30 содержит двигатель 32, который выборочно поворачивает канатоведущий шкив 28. Управляющий блок 34 управляет работой двигателя 32. Тормозное устройство 36 выборочного сопротивляется повороту канатоведущего шкива 28. Тормозное устройство 36 выполнено с возможностью остановки кабины 22 лифта на требуемой лестничной площадке и удерживания указанной кабины, например, в требуемом вертикальном положении. В соответствии с приведенным выше вариантом реализации тормозное устройство 36 и двигатель 32 поддерживаются посредством корпуса 38.
[00018] На Фиг.2-4 показано тормозное устройство 36. Монтажный элемент 40 облегчает установку тормозного устройства 36 на неподвижную поверхность, которая в соответствии с этим вариантом реализации содержит поверхность корпуса 38. Тормозной привод 42 вынуждает тормозной элемент 44 выборочно сопротивляться повороту канатоведущего шкива 28. Датчик 46 регистрирует силу, соответствующую крутящему моменту тормозного устройства 36. В соответствии с этим вариантом реализации датчик 46 обеспечивает индикацию силы, соответствующую любому перемещению монтажного элемента 40 относительно неподвижной поверхности корпуса 38 под действием крутящего момента тормозного устройства 36.
[00019] Как показано на Фиг.3, монтажный элемент 40 по меньшей мере частично упруго закреплен относительно корпуса 38, так что монтажный элемент 40 является частично подвижным относительно корпуса 38. Монтажный элемент 40 перемещается в пределах очень ограниченного диапазона с целью контроля силы при одновременном сохранении стабильного расположения для выдерживания нагрузок, соответствующих тормозному устройству 36, которое сопротивляется повороту канатоведущего шкива 28.
[00020] Как показано на Фиг.3, тормозное устройство 36 содержит упругое установочное приспособление, в котором анкер 50, например болт, и вкладыш 52 неподвижно закреплены в фиксированном положении относительно корпуса 38. Вкладыш 52 расположен внутри отверстия 54 в монтажном элементе 40. Упругий элемент 56, соотвествующий вкладышу 52, отклоняется или по меньшей мере частично сжимается под действием крутящего момента монтажного элемента 40, обусловленного крутящим моментом тормозного устройства 36, соответствующим тормозному элементу 44, который сопротивляется повороту канатоведущего шкива 28. В соответствии с одним из вариантов реализации упругий элемент 56 содержит уплотнительное кольцо. С учетом небольшого отклонения или перемещения монтажного элемента 40 относительно корпуса 38 предусмотрено, что посредством датчика 46 обеспечена индикация сил, соответствующих крутящему моменту тормозного устройства 36.
[00021] Как показано на Фиг.4, в соответствии с этим вариантом реализации датчик 46 содержит первый чувствительный элемент 60, который выполнен с возможностью обеспечения индикации силы, действующей в первом направлении и соответствующей любому относительному перемещению между монтажным элементом 40 и корпусом 38. Второй чувствительный элемент 62 выполнен с возможностью обеспечения индикации силы во втором направлении, противоположном указанному направлению первой силы. В соответствии с этим вариантом реализации первый чувствительный элемент 60 выполнен с возможностью обеспечения индикации силы в направлении против часовой стрелки, а второй чувствительный элемент 62 выполнен с возможностью обеспечения индикации силы в направлении по часовой стрелке.
[00022] В соответствии с одним из вариантов реализации указанные чувствительные элементы содержат резисторы измерения силы. В соответствии с другим вариантом реализации указанные чувствительные элементы содержат пьезорезистивные датчики. В соответствии с другими вариантами реализации датчики, используемые в качестве первого чувствительного элемента 60 и второго чувствительного элемента 62, включают тензометрические датчики, емкостные датчики, индуктивные датчики, потенциометрические датчики, датчики давления и прецизионные микропереключатели. Величина отклонения или относительного перемещения между монтажным элементом 40 и корпусом 38 очень мала, и первый чувствительный элемент 60 и второй чувствительный элемент 62 выполнены с возможностью регистрации сил, соответствующих очень малым изменениям в ориентации монтажного элемента 40 относительно корпуса 38.
[00023] В соответствии с этим вариантом реализации чувствительные элементы 60 и 62 установлены с примыканием к соответствующим реакционным поверхностям 64 на чувствительном блоке 66, который остается неподвижным относительно корпуса 38. В соответствии с этим вариантом реализации корпус 38 поддерживает чувствительный блок 66. В соответствии с другим вариантом реализации чувствительный блок 66 содержит часть корпуса 38. Установочные элементы 70 закрепляют чувствительные элементы 60 и 62 так, что указанные элементы оказываются сжатыми при соответствующем перемещении монтажного элемента 40 относительно корпуса 38. В соответствии с этим вариантом реализации с указанными чувствительными элементами связаны упругие амортизирующие элементы 72, которые равномерно распределяют нагрузку от установочных элементов 70 через соответствующие части указанных чувствительных элементов.
[00024] Индикации чувствительных элементов 60 и 62 расшифровываются посредством модуля 80 крутящего момента (показан на Фиг.1), который передает индикацию в зависимости от сил, зарегистрированных датчиком 46, в управляющий блок 34.
[00025] На Фиг.5 показан алгоритм управления согласно одному из вариантов реализации, использующий тормозное устройство 36. Кабина 22 лифта остановлена на лестничной площадке. Противовес 24 и кабина 22 подъемника неуравновешены. В результате возникает крутящий момент тормозного устройства 36, как показано и обозначено цифрой 90. Двигатель 32 обесточен, вследствие чего крутящий момент двигателя 32 имеет нулевое значение, как показано и обозначено цифрой 92. В этих условиях посредством первого чувствительного элемента 60 обеспечена индикация силы, соответствующая уровню момента, показанному и обозначенному цифрой 90.
[00026] До того как указанная кабина подъемника покинет указанную лестничную площадку, необходимо уменьшить крутящий момент тормоза с целью обеспечения плавного перехода из неподвижного положения по мере того, как кабина подъемника начинает ускоряться. Управляющий блок 34 подает ток в двигатель 32 с целью увеличения крутящего момента указанного двигателя, как схематически показано вдоль кривой 94. Двигатель 32 включен с целью обеспечения силы, противодействующей указанному крутящему моменту, обозначенному посредством чувствительного элемента 60. Другими словами, двигатель 32 пытается поворачивать канатоведущий шкив 28 в направлении для уменьшения силы, зарегистрированной первым чувствительным элементом 60 (например, в направлении, противоположном направлению указанной обозначенной силы). В результате крутящий момент, показанный посредством силы, зарегистрированный первым чувствительным элементом 60, уменьшается, как схематически показано посредством кривой 96. Крутящий момент тормозного устройства 36 полностью уменьшен, когда крутящий момент при торможении достигает нулевого значения, как показано и обозначено позицией 98. В соответствии с одним из вариантов реализации датчик 46 передает соответствующую индикацию модулю 80 крутящего момента. Управляющий блок 34 принимает соответствующий выходной сигнал от модуля 80 крутящего момента.
[00027] В соответствии с одним из вариантов реализации осуществляют управление двигателем 32 для достижения нулевого значения крутящего момента, обозначенного цифрой 98. В соответствии с этим вариантом реализации и согласно Фиг.5 предусмотрено поле допуска вокруг нулевого значения крутящего момента, обозначенного цифрой 98. В соответствии с этим вариантом реализации определяют, когда сила, обозначенная посредством датчика 46, находится в пределах диапазона приемлемых значений, схематически обозначенного на Фиг.5 цифрой 100.
[00028] В соответствии с одним из вариантов реализации, модуль 80 крутящего момента определяет, когда сила, обозначенная посредством первого чувствительного элемента 60, переходит из положения вне диапазона 100 приемлемых значений в положение внутри указанного диапазона. Указанная точка перехода обозначена цифрой 102. В соответствии с одним из вариантов реализации, как только модуль 80 крутящего момента выдает выходной сигнал о том, что крутящий момент тормозного устройства 36 находится в пределах диапазона 100 приемлемых значений, двигатель 32 поддерживает соответствующую величину крутящего момента канатоведущего шкива 28.
[00029] В соответствии с одним из вариантов реализации, крутящий момент двигателя продолжают увеличивать до тех пор, пока второй чувствительный элемент 62 не начинает показывать, что сила, зарегистрированная указанным чувствительным элементом, превысила соответствующий порог диапазона 100 приемлемых значений. Это показано на Фиг.5 и обозначено цифрой 104. Для определения точек, в которых силы, обозначенные посредством датчика 46, переходят из положения внутри диапазона 100 в положение вне его, крутящий момент двигателя может непрерывно регулироваться взад и вперед.
[00030] Каждая из точек 102 и 104 перехода имеет соответствующий ток двигателя, показанный и обозначенный цифрами 106 и 108 соответственно. В соответствии с одним из вариантов реализации управляющий блок 34 во взаимодействии с модулем 80 крутящего момента определяют значения тока в точках 106 и 108 перехода. Затем эти два значения тока усредняют с целью определения тока предварительного крутящего момента, прикладываемого к двигателю 32 перед разблокировкой или подъемом тормоза тормозного устройства 36. Использование усредненных значений тока в точках 106 и 108 перехода облегчает выбор параметров по сравнению с постоянными попытками точного определения точки нулевого крутящего момента, обозначенной цифрой 98. Использование таких усредненных значений является причиной возникновения потенциального гистерезиса в указанной системе и возможного износа компонентов, например, датчика 46.
[00031] Другим примером функции контроля, выполняемой посредством датчика 46, является определение состояния заедания тормоза. Обычно подъемные системы содержат специальные переключатели тормоза, которые предназначены для индикации состояния отсоединения тормоза в начале движения подъемника. Указанные переключатели тормоза предназначены для индикации того, остается ли указанный тормоз отсоединенным на весь период движения подъемника. Одним из недостатков указанных переключателей тормоза является то, что они способны лишь измерять перемещение тормозного приводного механизма и не обеспечивают индикацию фактического крутящего момента при торможении. Даже когда такие переключатели находятся в рабочем положении, заедание тормоза может остаться необнаруженным.
[00032] Описанный датчик 46 позволяет измерять заедание тормоза напрямую. Датчик 46 обеспечивает выходной сигнал, соответствующий крутящему моменту тормоза во время движения кабины подъемника, например, в случае заедания тормозного элемента 44. В соответствии с одним из вариантов реализации, когда индикация заедания тормоза находится в пределах диапазона приемлемых значений, модуль 80 крутящего момента обеспечивает соответствующий выходной сигнал, так что специалисты по техобслуживанию и ремонту могут соответствующим образом разобраться в сложившейся ситуации. Если обозначенный крутящий момент, связанный с заеданием тормоза, превышает выбранную величину, то в управляющий блок 34 посредством модуля 80 крутящего момента передается предупреждающий выходной сигнал. В соответствии с одним из вариантов реализации управляющий блок 34 воспринимает такой предупреждающий сигнал как необходимость прерывания нормальной работы подъемной системы и вынуждения кабины 22 подъемника посредством управляющего блока 34 продолжать движение до соответствующей лестничной площадки, где двери указанной кабины открываются и из нее выходят пассажиры. Затем указанную кабину подъемника выводят из эксплуатации до тех пор, пока специалисты по техобслуживанию и ремонту не проверят рабочее состояние тормозного устройства 36.
[00033] Общей характеристикой всех приведенных выше вариантов реализации является отсутствие необходимости точного измерения крутящего момента при торможении. Необходимо лишь измерить силу, соотвествтующую ограниченной величине перемещения монтажного элемента 40 относительно корпуса 38. Нагрузка на кабину подъемника не поглощается или не обнаруживается посредством датчика 46, но посредством указанного датчика регистрируются силы, соотвествующие относительному перемещению монтажного элемента 40 и корпуса 38. Другой характеристикой всех приведенных выше вариантов реализации является отсутствие необходимости измерения нагрузки на кабину подъемника для вычисления величины предварительного крутящего момента двигателя 32. В соответствии с приведенными выше вариантами реализации возможно использование крутящего момента двигателя для разгрузки тормоза до подъема указанного тормоза в начале движения подъемника более удобным и надежным способом по сравнению с предшествующими способами. Кроме того, возможно устранение известных переключателей тормоза и использование контроля заедания тормоза, как описано выше.
[00034] Настоящее изобретение не ограничено конкретными вариантами реализации, раскрытыми в настоящем описании. Для специалиста очевидно, что возможны изменения и модификации, не выходящие за пределы сущности и объема настоящего изобретения. Объем правовой защиты настоящего изобретения может быть определен только путем изучения прилагаемой формулы изобретения.
Реферат
Изобретение относится к области подъемников и предназначено для использования крутящего момента двигателя для разгрузки тормоза до подъема тормоза в начале движения подъемника. Подъемное устройство (20) содержит корпус, двигатель (32), канатоведущий шкив (28), тормозное устройство (36), монтажный элемент, датчик. При контроле тормоза регистрируют силу, перемещающую тормозной монтажный элемент, определяют, находится ли зарегистрированная сила в диапазоне, соответствующем допустимой величине крутящего момента тормоза, обеспечивают индикацию того, что сила находится вне указанного диапазона. Достигается разгрузка тормоза до подъема тормоза в начале движения подъемника. 3 н. и 19 з.п. ф-лы, 5 ил.
Формула
тормозной элемент, выполненный с возможностью приложения тормозной силы с целью сопротивления повороту соответствующего компонента;
монтажный элемент, выполненный с возможностью прикрепления указанного тормозного устройства к неподвижной поверхности с обеспечением возможности, по меньшей мере, его частичного перемещения относительно указанной неподвижной поверхности под действием крутящего момента указанного тормозного устройства; и
датчик, выполненный с возможностью индикации силы, соответствующей любому перемещению указанного монтажного элемента относительно указанной неподвижной поверхности под действием указанного крутящего момента.
корпус;
двигатель, по меньшей мере, частично поддерживаемый указанным корпусом;
канатоведущий шкив, выполненный с возможностью выборочного поворота указанным двигателем;
тормозной элемент, выполненный с возможностью выборочного сопротивления повороту указанного канатоведущего шкива;
монтажный элемент, прикрепленный к указанному корпусу с обеспечением возможности частичного перемещения относительно корпуса под действием крутящего момента указанного тормозного элемента, обусловленного сопротивлением указанного тормозного элемента повороту указанного канатоведущего шкива; и
датчик, выполненный с возможностью индикации силы, соответствующей перемещению указанного монтажного элемента относительно указанного корпуса.
определение того, находится ли зарегистрированная сила в диапазоне, соответствующем допустимой величине крутящего момента указанного тормоза; и
обеспечение индикации, по меньшей мере, того, что указанная сила находится вне указанного диапазона.
регистрацию силы, действующей в первом направлении, когда соответствующая кабина лифта остановлена;
приложение противодействующей силы, действующей во втором направлении, противоположном первому направлению, до обеспечения перехода указанной силы, действующей в первом направлении, в указанный диапазон; и
разблокировку тормоза, когда зарегистрированная сила находится в указанном диапазоне.
определение рабочего состояния соответствующего двигателя, когда указанная сила находится в указанном диапазоне; и
перевод указанного двигателя в рабочее состояние перед разблокировкой тормоза.
определение первого тока двигателя, соответствующего указанной противодействующей силе, которая вызывает переход силы, действующей в первом направлении, в указанный диапазон;
дальнейшее приложение противодействующей силы, действующей во втором направлении, до выхода величины силы, действующей во втором направлении, из указанного диапазона;
определение второго тока двигателя, соответствующего выходу указанной силы, действующей во втором направлении, из указанного диапазона;
определение среднего тока первого тока двигателя и второго тока двигателя и
обеспечение в двигателе, связанном с тормозом подъемного устройства, указанного среднего тока во время разблокировки указанного тормоза.
обеспечение индикации заедания тормоза при регистрации указанной силы, когда подъемная кабина, связанная с указанным тормозом, движется, а указанный тормоз должен быть отключен.
Документы, цитированные в отчёте о поиске
Транспортное средство с электрической и механической тормозными системами

Комментарии