Система свободного руления для подвижных машин - RU2760718C2
Код документа: RU2760718C2
Чертежи



Описание
Область техники
Это изобретение относится, в целом, как к машинам, так и к способу для управления рулением подвижных строительных машин, в частности, точного руления шасси и его навесного устройства.
Уровень техники
Автоматические системы руления для подвижных наземных машин (строительных, сельскохозяйственных, горнодобывающих и т.д.) следуют траектории с помощью контроллера пропорционально–интегрально–дифференциального регулирования с замкнутым контуром (PID), чтобы минимизировать ошибки отслеживания траектории. PID–контроллер непрерывно вычисляет значение погрешности на основе измеренной переменной желаемой заданной величины и применяет корректировку.
Для машин с ограниченным рулевым управлением, т.е. только с передним рулевым управлением, синхронизация отдельных гусениц, главным образом, гарантируется посредством механической/геометрической конструкции гусеничной системы. Минимизация погрешности отслеживания траектории является первичной целью для автономного управления рулением и, по существу, является главным элементом для всех систем рулевого управления.
Контрвращение, реализованное на погрузчике с бортовым поворотом, бульдозере или аналогичных двухгусеничных машинах с гусеницами/колесами, жестко прикрепленными к шасси, работает посредством перемещения одной стороны вперед, а другой стороны в обратном направлении. На меньшем устройстве контрвращение посредством этого способа называется нулевым радиусом поворота.
Другое устройство, такое как вездеходные вилочные подъемники, машины для устройства грунтоцементных покрытий и асфальтоукладчик, предусматривает перемещение боком, скоординированное и переднее/заднее руление. Когда в конструкцию включены управляемые гусеницы, выборочно или для всех гусениц, возможны более сложные скоординированные движения руления.
Следовательно, было бы полезно, если бы существовало устройство и способ для руления гусеницами и колесами, чтобы автоматически рулить машинами по сложным траекториям и кривым.
Сущность изобретения
По меньшей мере, в одном варианте осуществления строительная машина с множеством управляемых гусениц включает в себя компьютерную систему для динамического руления гусеницами и активации движения вперед и назад в каждой гусенице независимо. Такая система определяет центр вращения и соответствующее отклонение гусеницы и скоростей, чтобы выполнять вращение или контрвращение.
В другом варианте осуществления компьютерная система преобразует сложную траекторию в дуговые отрезки, каждый дуговой отрезок соответствует конкретному центру вращения, и динамически определяет места центров вращения, чтобы перемещать машину (или соответствующий инструмент) по каждому дуговому отрезку.
Свободно плавающий, динамический центр вращения ограничивает углы гусениц машины общим центром вращения и ассоциирует эти углы и скорости гусениц, чтобы автоматически применять соответствующие параметры.
Краткое описание чертежей
Многочисленные преимущества вариантов осуществления изобретенных концепций, описанных в данном документе, могут быть лучше поняты специалистами в области техники посредством ссылки на сопровождающие чертежи, на которых:
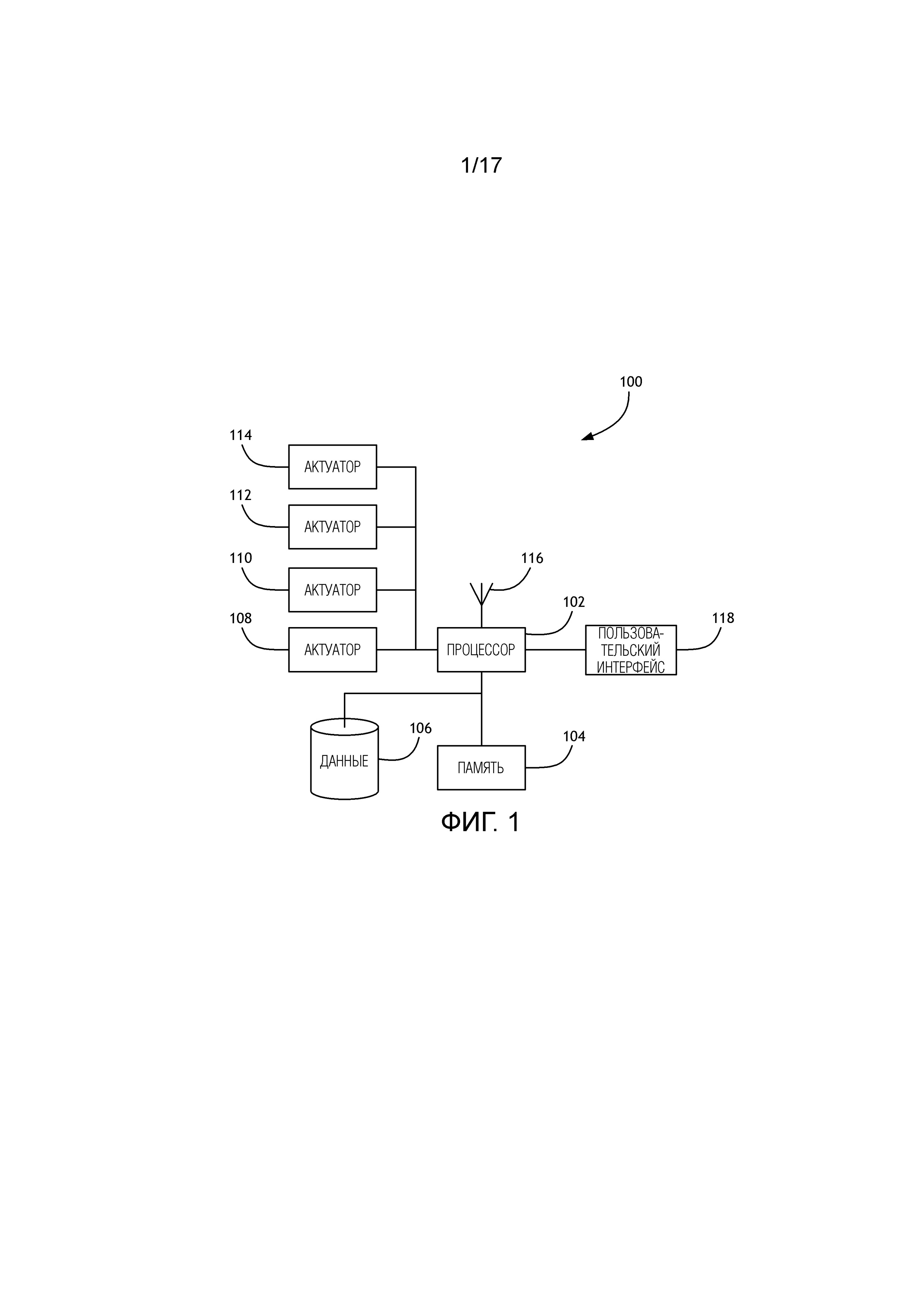
Фиг. 1 показывает блок–схему примерного варианта осуществления системы для реализации идей изобретения, описанных в данном документе;
Фиг. 2A показывает вид сверху многогусеничной строительной машины согласно вариантам осуществления идей изобретения, описанных в данном документе;
Фиг. 2B показывает вид сверху многогусеничной строительной машины согласно вариантам осуществления идей изобретения, описанных в данном документе;
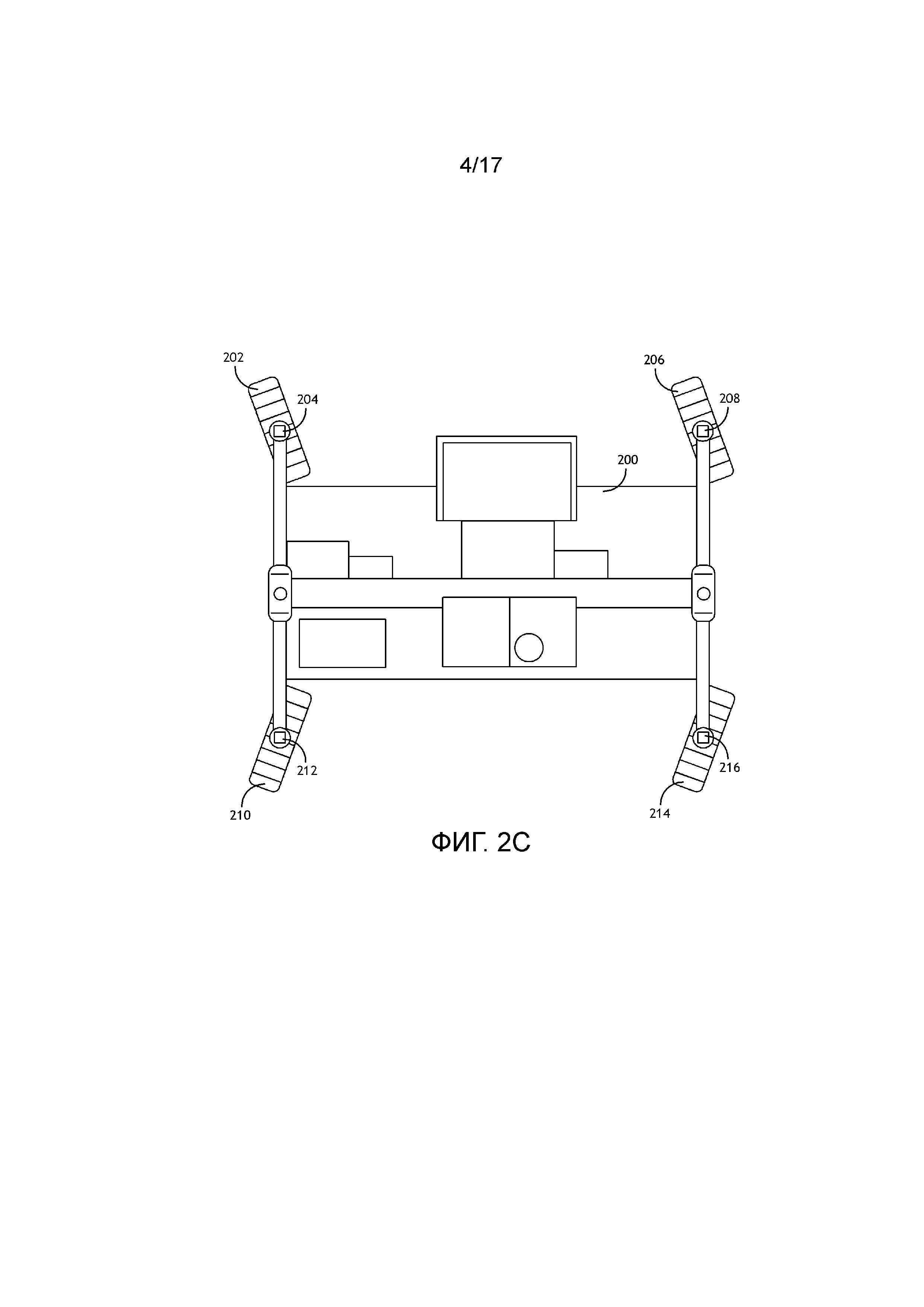
Фиг. 2C показывает вид сверху многогусеничной строительной машины согласно вариантам осуществления идей изобретения, описанных в данном документе;
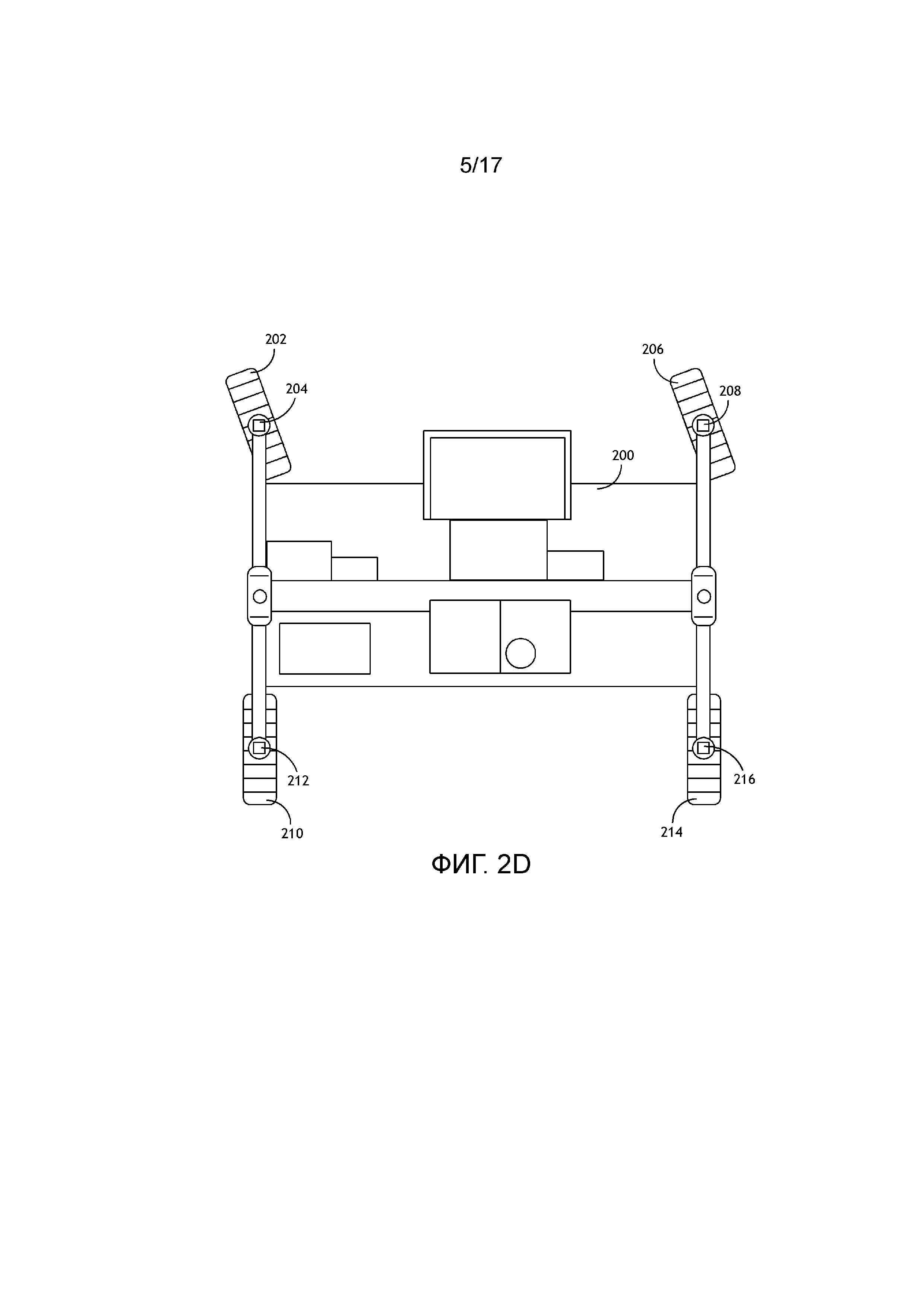
Фиг. 2D показывает вид сверху многогусеничной строительной машины согласно вариантам осуществления идей изобретения, описанных в данном документе;
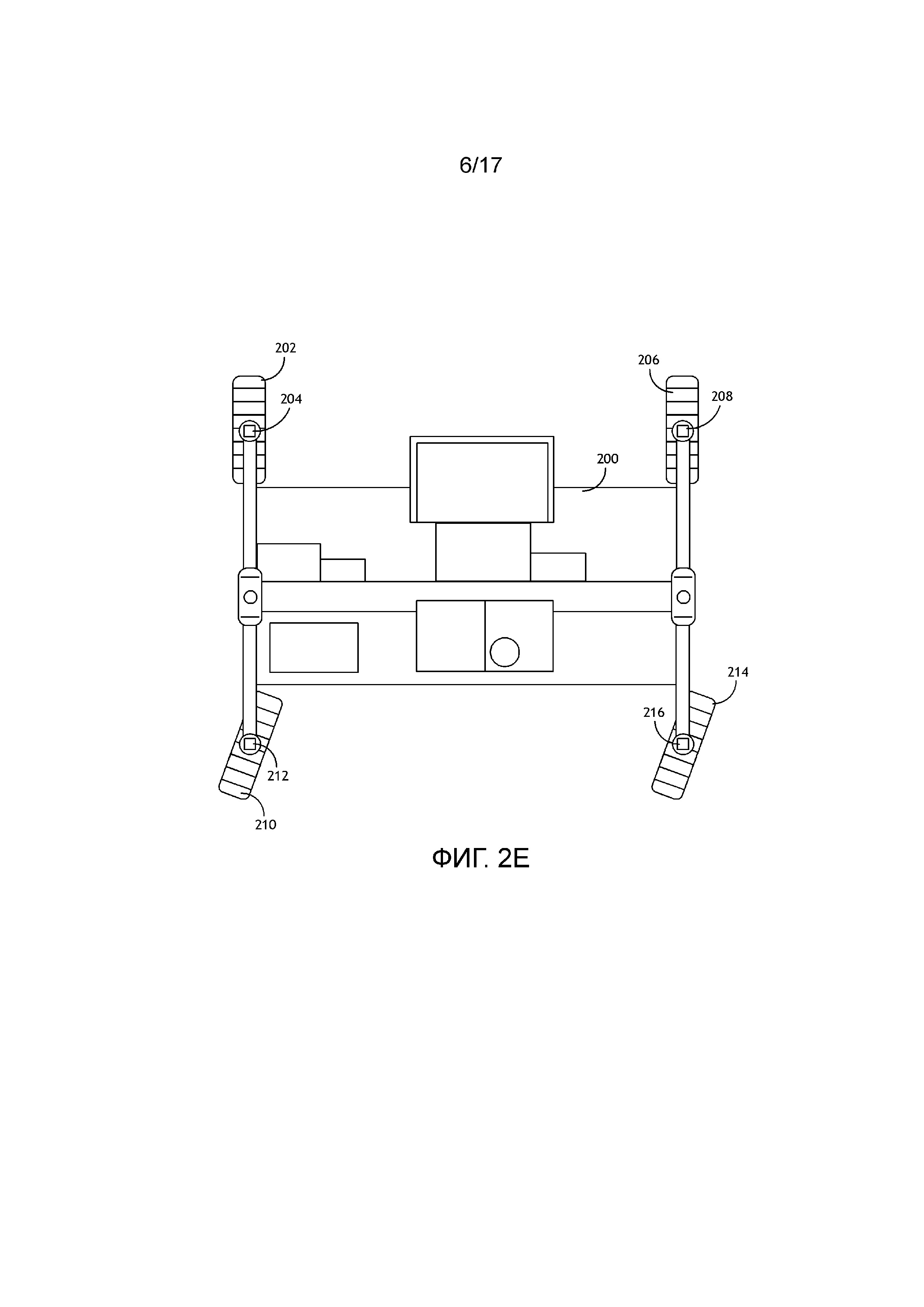
Фиг. 2E показывает вид сверху многогусеничной строительной машины согласно вариантам осуществления идей изобретения, описанных в данном документе;
Фиг. 3 показывает вид сверху многогусеничной строительной машины согласно вариантам осуществления идей изобретения, описанных в данном документе;
Фиг. 4 показывает схематичное представление зон режима руления для многогусеничной строительной машины согласно вариантам осуществления идей изобретения, описанных в данном документе;
Фиг. 5 показывает схематичное представление многогусеничной строительной машины согласно вариантам осуществления идей изобретения, описанных в данном документе;
Фиг. 6 показывает схематичное представление зон режима руления для многогусеничной строительной машины согласно вариантам осуществления идей изобретения, описанных в данном документе;
Фиг. 7 показывает схематичное представление многогусеничной строительной машины, использующей переднее руление согласно вариантам осуществления идей изобретения, описанных в данном документе;
Фиг. 8 показывает схематичное представление многогусеничной строительной машины, использующей переднее руление согласно вариантам осуществления идей изобретения, описанных в данном документе;
Фиг. 9 показывает схематичное представление многогусеничной строительной машины, использующей переднее руление согласно вариантам осуществления идей изобретения, описанных в данном документе;
Фиг. 10 показывает схематичное представление многогусеничной строительной машины, использующей заднее руление согласно вариантам осуществления идей изобретения, описанных в данном документе;
Фиг. 11 показывает схематичное представление многогусеничной строительной машины, использующей заднее руление согласно вариантам осуществления идей изобретения, описанных в данном документе;
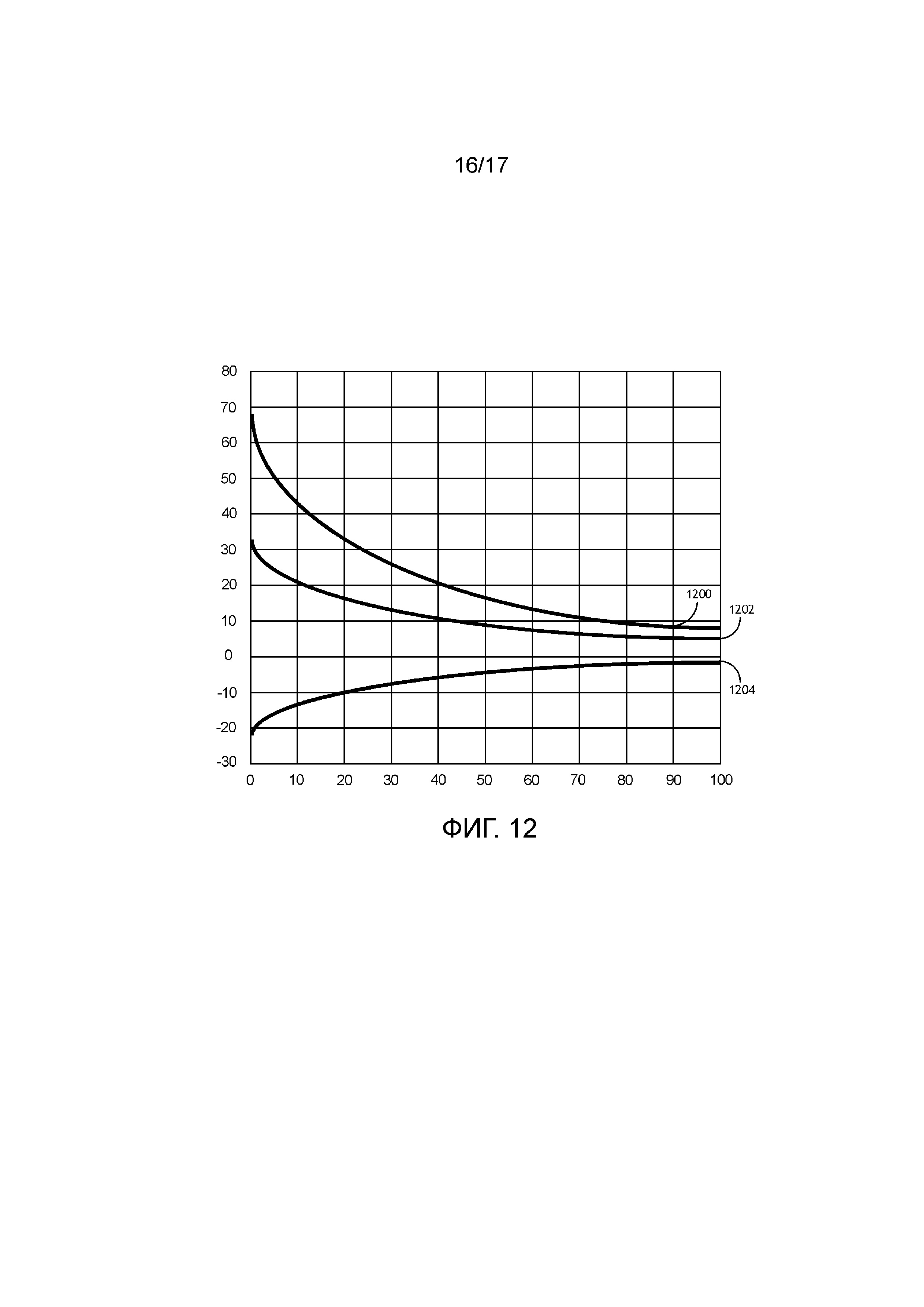
Фиг. 12 показывает график отклонения ведущих гусениц, ассоциированных с расстоянием перемещения согласно вариантам осуществления идей изобретения, описанных в данном документе; и
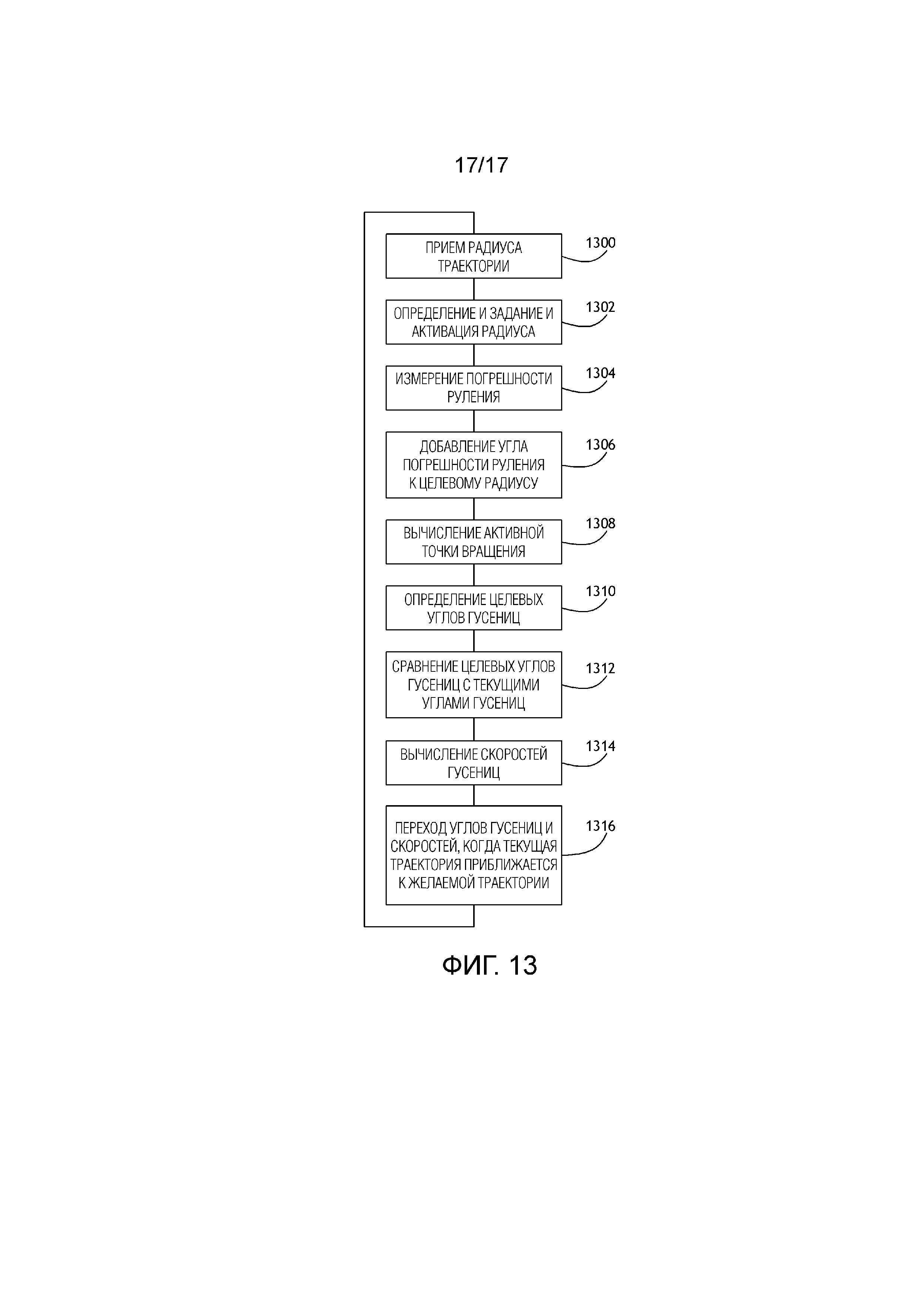
Фиг. 13 показывает блок–схему последовательности операций способа руления машиной согласно вариантам осуществления идей изобретения, описанных в данном документе.
Подробное описание изобретения
Перед объяснением, по меньшей мере, одного варианта осуществления идей изобретения, описанных в данном документе подробно, следует понимать, что идеи изобретения не ограничиваются своим применением к деталям конструкции и компоновке компонентов или этапам или методологиям, изложенным в последующем описании или иллюстрированным на чертежах. В последующем подробном описании вариантов осуществления текущих идей изобретения многочисленные конкретные детали излагаются в порядке, чтобы предоставлять более полное понимание идей изобретения. Однако, будет понятно обычному специалисту в области техники, имеющему пользу от текущего описания, что идеи изобретения, описанные в данном документе, могут быть применены на практике без этих конкретных деталей. В других случаях, хорошо известные отличительные признаки могут не описываться подробно, чтобы избегать ненужного усложнения текущего описания. Идеи изобретения, описанные в данном документе, являются приспособленными для других вариантов осуществления или применения на практике или выполнения другими способами. Также, должно быть понятно, что фразеология и терминология, применяемая в данном документе, используется с целью описания и не должна быть расценена как ограничение.
Когда используется в данном документе, буква, следующая за ссылочным номером, предназначается, чтобы ссылаться на вариант осуществления отличительного признака или элемента, который может быть аналогичным, но необязательно идентичным, ранее описанному элементу или отличительному признаку, несущему тот же ссылочный номер (например, 1, 1a, 1b). Такие сокращенные обозначения используются только в целях удобства и не должны истолковываться, чтобы ограничивать идеи изобретения, описанные в данном документе, каким–либо образом, пока явно не установлено противоположное.
Дополнительно, пока явно не установлено противоположное, "или" ссылается на инклюзивное или, а не на эксклюзивное или. Например, условие A или B удовлетворяется посредством любого из следующего: A истинно (или присутствует), а B ложно (или не присутствует), A ложно (или не присутствует), а B истинно (или присутствует), и оба A и B истинны (или присутствует).
Кроме того, использование единственного числа применяется для описания элементов и компонентов вариантов осуществления текущих идей изобретения. Это выполняется просто для удобства и для предоставления общего смысла идей изобретения, и такое описание подразумевает применение и множественного числа, пока не является очевидным, что оно означает иное.
Наконец, когда используется в данном документе, какая–либо ссылка на "один вариант осуществления" или "некоторые варианты осуществления" означает, что конкретный элемент, отличительный признак, структура или характеристика, описанная в связи с вариантом осуществления, содержится, по меньшей мере, в одном варианте осуществления идей изобретения, описанных в данном документе. Появления фразы "в некоторых вариантах осуществления" в различных местах в спецификации необязательно все ссылаются на один и тот же вариант осуществления, и варианты осуществления описанных идей изобретения могут включать в себя один или более отличительных признаков, явно описанных или по определению присутствующих в данном документе, или любое сочетание подкомбинации двух или более таких признаков, вместе с любыми другими отличительными признаками, которые могут необязательно быть явно описаны или по определению присутствовать в текущем описании.
Некоторые описания, представленные в данном документе, могут быть более полно поняты со ссылкой на документ Steering system tailored to field requirements, доступный по адресу https://www.wirtgen.de/en/technologies/soil–stabilization/operating–principle/lenksystem_1.php; и X. Tu, “Robust navigation control and headland turning,” Graduate Theses and Dissertations, Iowa State University – Ames, 2013.
Обращаясь к фиг. 1, показана блок–схема примерного варианта осуществления системы 100 для реализации идей изобретения, описанных в данном документе. Система 100 включает в себя процессор 102, память 104, соединенную с процессором 102 для хранения исполняемого процессором кода, элемент 106 хранения данных, соединенный с процессором 102 для хранения релевантных данных о траектории, как более полно описывается в данном документе, и множество актуаторов 108, 110, 112, 114, каждый ассоциирован с гусеницей или колесом. Процессор 102 динамически активирует каждый из актуаторов 108, 110, 112, 114, чтобы поворачивать ассоциированную гусеницу или колесо, чтобы реализовывать траекторию, определенную релевантными данными о траектории. Такая реализация может включать в себя динамический сдвиг центра вращения, чтобы создавать сложные кривые переменного радиуса. Актуаторы 108, 110, 112, 114 могут содержать элементы для поворота ассоциированной гусеницы или линейного перемещения или регулировки местоположения соответствующей гусеницы относительно некоторой контрольной точки на машине, или некоторое их сочетание.
По меньшей мере, в одном варианте осуществления система 100 также включает в себя одну или более антенн 116 для беспроводной передачи данных, включающей в себя передачу спутниковой навигационной системе, такой как система глобального позиционирования. Процессор 102 принимает данные о позиционировании, чтобы идентифицировать позицию в реальном мире машины, включающей в себя систему 100, и использует такие данные о позиционировании вместе с данными о траектории, чтобы применять алгоритмы корректировки, чтобы автоматически регулировать множество актуаторов 108, 110, 112, 114 и поддерживать машину на желаемой траектории. По меньшей мере, в одном варианте осуществления каждый из множества актуаторов 108, 110, 112, 114 может быть ассоциирован с набором функций для корректировки идентифицированного отклонения во время конкретного рабочего режима, как более полно определено в данном документе.
По меньшей мере, в одном варианте осуществления оператор взаимодействует 118 с системой 100 через проводной или беспроводной ручной контроллер, такой как джойстик и традиционный однокнопочный рулевой дисковый регулятор (один вход) и дисковый регулятор движения (один вход). По меньшей мере, в одном варианте осуществления рулевой диск конфигурируется посредством программируемых параметров, т.е. оси центра вращения (y–значения).
По меньшей мере, в одном варианте осуществления джойстик имеет традиционную конструкцию для перемещения (вперед/назад) посредством нажатия/потягивания и функцию перемещения боком посредством движения влево/вправо. Машина может перемещаться боком посредством перемещения центра вращения по "кругу перемещения боком". По меньшей мере, в одном варианте осуществления, кручение джойстика может перемещать центр вращения, чтобы инициировать скоординированное руление. С помощью одной руки (джойстика) система 100 обеспечивает всю гибкость перемещения без переключения режимов.
По меньшей мере, в одном варианте осуществления интерфейс 118 включает в себя графический пользовательский интерфейс (GUI) на дисплее, таком как сенсорный экран, который предоставляет возможность пользователю задавать/регулировать параметры системы 100, такие как, но не только, скорость, режим руления и позиционирование центра вращения. Во время автоматической работы такой GUI может быть предпочтительным интерфейсом. Кроме того, система 100 может включать в себя некоторое сочетание интерфейсов 118, таких как дисковый регулятор, чтобы задавать скорость, и джойстик для руления, с вспомогательными кнопками для системы автоматического поддержания скорости, блокировки руления и т.д.
Обращаясь к фиг. 2A–2E, показаны виды сверху многогусеничной строительной машины 200 согласно вариантам осуществления идей изобретения, описываемых в данном документе. Машина 200 включает в себя множество гусениц 202, 206, 210, 214 (или колес) с независимым движением, каждая ассоциируется с одним или более актуаторами 204, 208, 212, 216, которые независимо вращают ассоциированную гусеницу 202, 206, 210 согласно набору функций, чтобы создавать желаемую траекторию для машины 200.
По меньшей мере, в одном варианте осуществления все гусеницы 202, 206, 210, 214 вращаются на одинаковую величину, определенную функцией tan–1(длина/ширина); передние гусеницы 202, 206 поворачиваются внутрь, в то время как задние гусеницы 210, 214 поворачиваются наружу. Центр вращения будет находиться в центре шасси. Расстояние до каждой из гусениц 202, 206, 210, 214 от центра вращения является одинаковым, также как и скорости гусениц. Контрвращение осуществляется посредством движения каждой из гусениц 202, 206, 210, 214 с одинаковой скоростью, при этом одна сторона движется вперед, а другая сторона движется в обратном направлении.
Описанная окружность многоугольника, созданного соединением центров гусениц (прямоугольник в настоящем примером варианте осуществления) включает в себя центр вращения (центр описанной окружности) и расстояние от центра вращения до каждой гусеницы (радиус описанной окружности). Разнообразие конструкций подвижной машины и конфигураций разрешают и ограничивают окружение и противовращение. Местоположения гусениц, имеющих описанную окружность, называются конциклической конфигурацией машины. Конциклические конфигурации машины включают в себя все правильные многоугольники, такие как треугольники, прямоугольники и равнобедренные трапеции, которые все являются обычными формами машины; однако, такая компоновка не гарантирует, что машина может контрвращаться. Гусеницы 202, 206, 210, 214 также должны иметь возможность свободно поворачиваться на желательный угол и двигаться с равными скоростями.
Маневренность машины 200 значительно улучшается за счет способности контрвращаться, например, когда она поворачивается в наименьшей возможной области. Конциклические конфигурации машины имеют единственный радиус описанной окружности, который переводится в контур хода равных скоростей. Для гидравлических приводов одинаковые скорости хода переводятся в одинаковый расход текучей среды; что является простым, доступным и очень эффективным контуром хода для относительно прямого движения.
Машина 200 может быть помещена во множество режимов, определенных по типу движения машины 200 и местоположению центра вращения. Обращаясь к фиг. 2A, машина 200 показана в режиме вращения, когда каждая из гусениц 202, 206, 210, 214 конфигурируется, чтобы вращать машину 200 вокруг центра вращения в габаритной площади машины 200 без перемещения боком или другого поперечного движения. Обращаясь к фиг. 2B, машина 200 показана в режиме перемещения боком, когда каждая из гусениц 202, 206, 210, 214 конфигурируется, чтобы перемещать машину 200 линейно по траектории; в некоторых математических целях такое движение может быть смоделировано как вращение с центром вращения в бесконечности. Обращаясь к фиг. 2C, машина 200 показана в режиме вращения, когда каждая из гусениц 202, 206, 210, 214 конфигурируется, чтобы поворачивать машину 200 вокруг центра вращения снаружи габаритной площади машины 200. Обращаясь к фиг. 2D, машина 200 показана в режиме вращения, когда передние гусеницы 202, 206 конфигурируются, чтобы вращать машину 200, в то время как задние гусеницы 210, 214 конфигурируются для линейного движения; в таком режиме передние гусеницы 202, 206 могут иметь различные отклонения. Обращаясь к фиг. 2E, машина 200 показана в режиме вращения, когда задние гусеницы 210, 214 конфигурируются, чтобы вращать машину 200, в то время как передние гусеницы 202, 206 конфигурируются для линейного движения; в таком режиме задние гусеницы 210, 214 могут иметь различные отклонения.
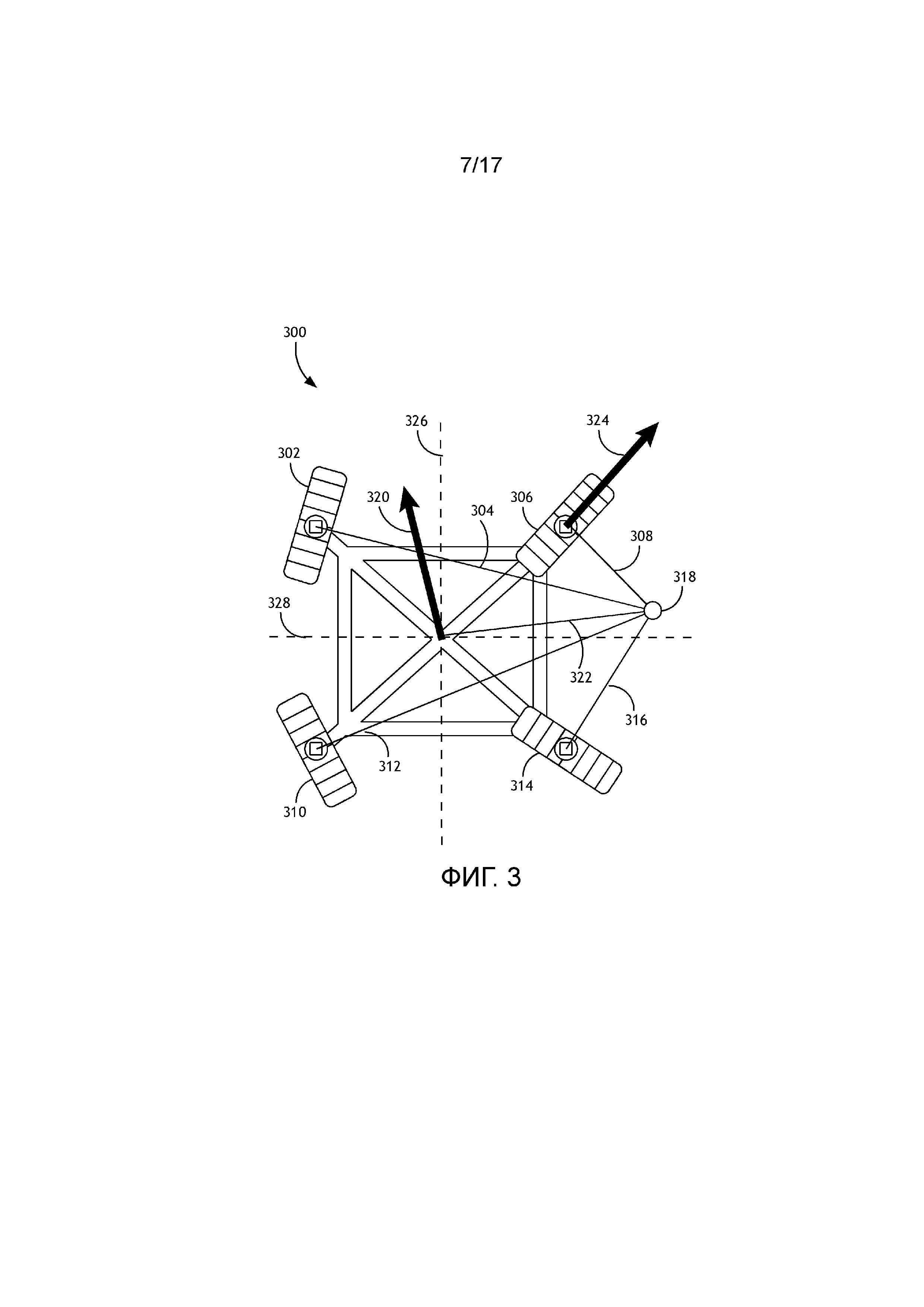
Обращаясь к фиг. 3, показан вид сверху многогусеничной строительной машины 300 согласно вариантам осуществления идей изобретения, описываемых в данном документе. Машина F_00 включает в себя множество гусениц 302, 306, 310, 314 или колес. По меньшей мере, в одном варианте осуществления машина 300 сконфигурирована, чтобы вращаться вокруг центра вращения 318 в плоскости, определенной вертикальной осью 326 и горизонтальной осью 328. Центр вращения 318 может быть внешним по отношению к габаритной площади машины 300.
Конфигурация гусениц 302, 306, 310, 314 может определять или быть определенной посредством направления движения 320, ортогонального вектору 322 от центра вращения 318 до фиксированной точки машины 300. Кроме того, направление движения 320 может непрерывно обновляться во время вращения, когда вектор 322 обновляется, или соответствовать касательной для дуги, ассоциированной с вращением. Аналогично, каждая гусеница 302, 306, 310, 314 может быть ассоциирована с характерным вектором 304, 308, 312, 316 гусеницы из центра вращения, чтобы определять отклонение для каждой гусеницы 302, 306, 310, 314. Например, вторая гусеница 306 ассоциируется со вторым характерным вектором 308 гусеницы и соответствующим направлением движения 324 с отклонением либо от вертикальной оси 326, либо горизонтальной оси 328, чтобы сохранять направление движения 324 по касательной к дуге, ассоциированной с вращением. Каждая гусеница 302, 306, 310, 314 или некоторое подмножество гусениц 302, 306, 310, 314 в машине 300, где одна или более гусениц 302, 306, 310, 314 установлены, могут иметь характерное отклонение, определенное расстоянием каждой гусеницы 302, 306, 310, 314 от центра вращения 318.
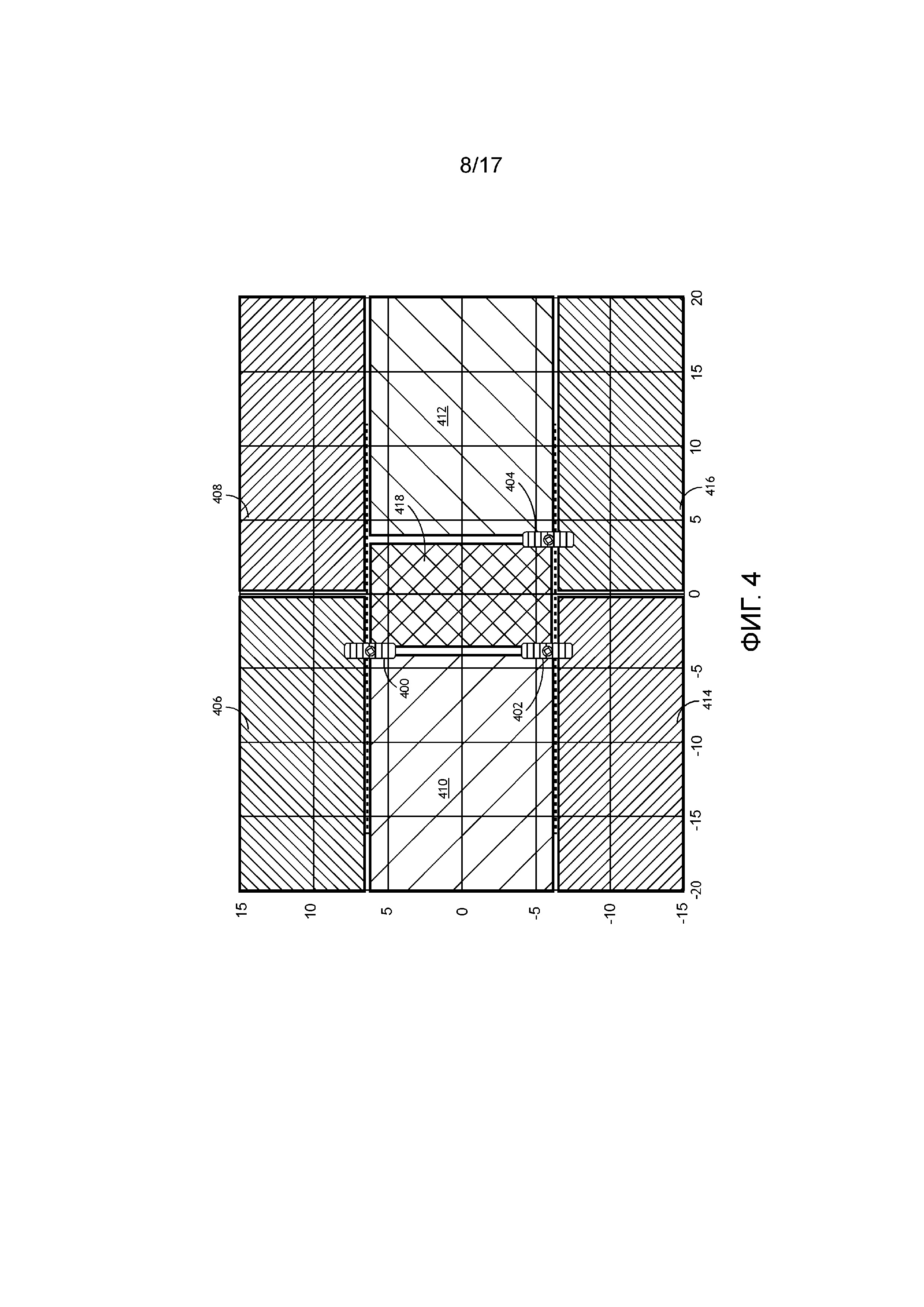
Обращаясь к фиг. 4, показано схематичное представление пространственной области с зонами 406, 408, 410, 412, 414, 416, 418 режима руления для многогусеничной строительной машины согласно вариантам осуществления идей изобретения, описываемых в данном документе. Центр вращения может быть где угодно в XY–плоскости. По меньшей мере, в одном варианте осуществления зоны 406, 408, 410, 412, 414, 416, 418 режима руления включают в себя зоны 406, 416 "перемещения боком вправо", определяющие общее направление движения, когда гусеницы 400, 402, 404 или колеса машины находятся в конфигурации перемещения боком вправо; зоны 408, 414 "перемещения боком влево", определяющие общее направление движения, когда гусеницы 400, 402, 404 или колеса машины находятся в конфигурации перемещения боком влево; зоны 410, 412 "скоординированного движения влево" и "скоординированного движения вправо", когда гусеницы 400, 402, 404 или колеса машины находятся в конфигурации, чтобы перемещаться влево или вправо соответственно; и зону 418 "контрвращения", когда гусеницы 400, 402, 404 или колеса машины находятся в конфигурации для вращения практически в пределах габаритной площади машины.
Каждая зона 406, 408, 410, 412, 414, 416, 418 может быть ассоциирована со схемой отклонения гусениц или набором функций для каждой гусеницы 400, 402, 404 на основе характерного вектора гусеницы в такой зоне 406, 408, 410, 412, 414, 416, 418 или центра вращения с такой зоной 406, 408, 410, 412, 414, 416, 418. Такие схемы отклонения или функции могут включать в себя переменные на основе числа и местоположения управляемых гусениц 400, 402, 404.
По меньшей мере, в одном варианте осуществления контрвращение не ограничивается вращением по описанной окружности, но может также подвергаться влиянию через вращения с минимальным радиусом. Центр вращения может быть расположен в зоне 406, 408, 410, 412, 414, 416, 418, внутри или снаружи шасси машины, и может быть динамически подвижным. Такой вариант осуществления может все еще предоставлять возможность для всех существующих режимов руления: только вперед, перемещение боком, скоординированное перемещение, контрвращение по описанной окружности и т.д. Дополнительно, такой вариант осуществления может предоставлять возможность другого управления с минимальным, небольшим и большим радиусом: вращения по описанной окружности, нециклические внутренние вращения кузова/шасси и контрвращения, несимметрично скоординированные.
Обращаясь к фиг. 5, показано схематичное представление многогусеничной строительной машины, где множество гусениц 502, 508, 514 ограничиваются позицией 524 передней гусеницы и позицией 526 задней гусеницы, согласно вариантам осуществления идей изобретения, описанных в данном документе. По меньшей мере, в одном варианте осуществления, каждая из множества гусениц 502, 508, 514 или колес ассоциируется с нейтральной передней ориентацией 504, 510, 516, от которой отклонения гусениц могут быть измерены. По меньшей мере, в одном варианте осуществления такие отклонения основываются на характерном векторе 506, 512, 518 гусеницы из центра вращения 520 к соответствующей гусенице 502, 508, 514, чтобы создавать траекторию 522 вращения. Фиг. 5 иллюстрирует центр вращения 520 в пределах габаритной площади машины, и машина может полностью содержаться в пределах траектории 522 вращения.
Минимальный радиус поворота для какой–либо подвижной машины является описанной окружностью и находится в пределах радиуса описанной окружности для машины. Такие повороты могут быть осуществлены с помощью как контрвращения, так и вращения. Контрвращения требует меньшего диапазона в угле поворота гусениц 502, 508, 514; вращение требует однопотокового делящего контура хода.
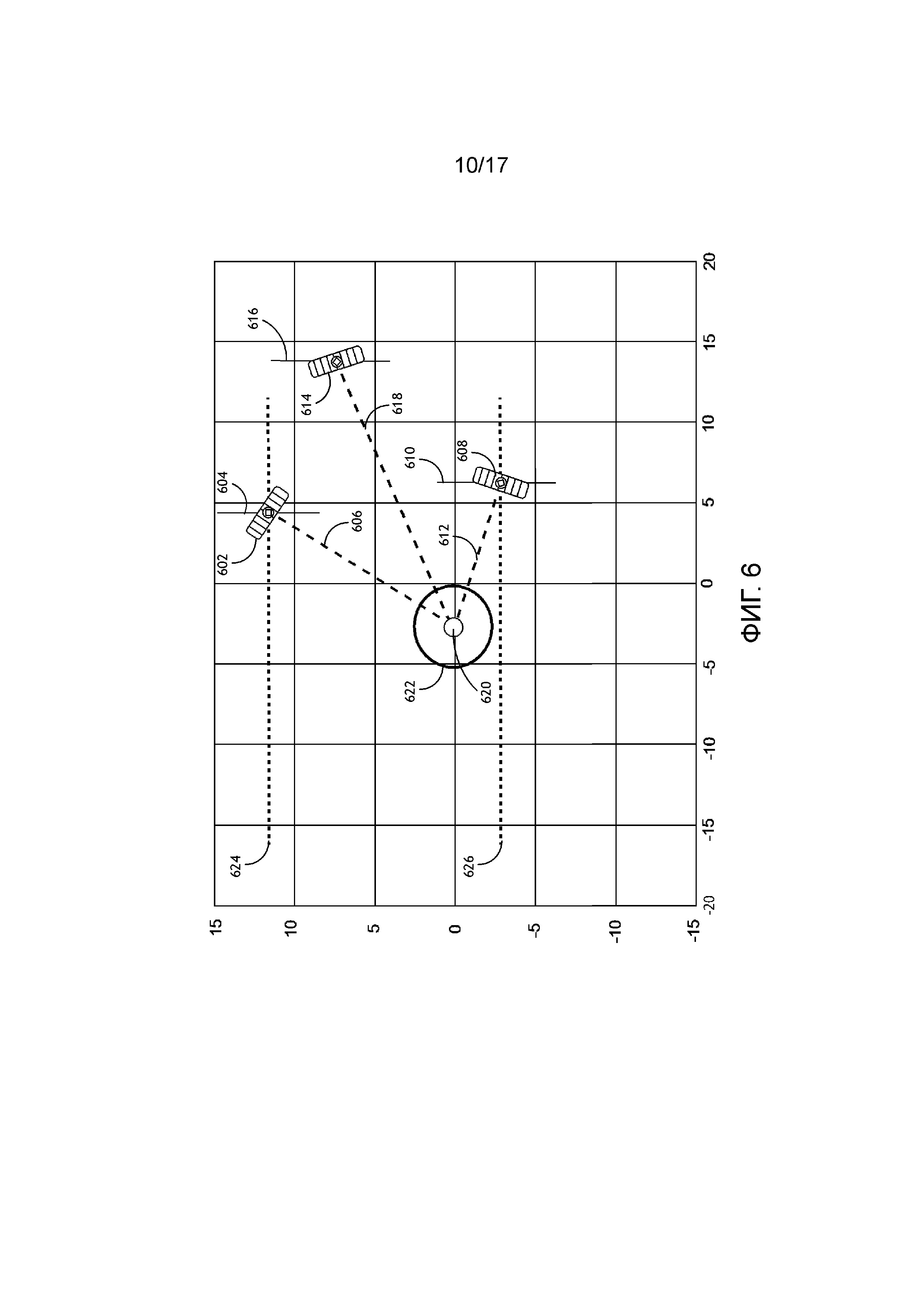
Обращаясь к фиг. 6, схематичное представление многогусеничной строительной машины, где множество гусениц 602, 608, 614 или колес ограничены позицией 624 передней гусеницы и позицией 626 задней гусеницы, и каждая из множества гусениц 602, 608, 614 ассоциируется с нейтральной передней ориентацией 604, 610, 616, от которой отклонения гусениц могут быть измерены. Такие отклонения основываются на характерном векторе 606, 612, 618 гусеницы от центра вращения 620 до соответствующей гусеницы 602, 608, 614, чтобы создавать траекторию 622 вращения. Фиг. 6 иллюстрирует центр вращения 620, внешний по отношению к габаритной площади машины. Кроме того, размер (диаметр) траектории 622 вращения может быть определен посредством длин характерных векторов 606, 612, 618 гусениц; т.е., расстояния каждой гусеницы 602, 608, 614 от центра вращения 620. По меньшей мере, в одном варианте осуществления траектория 622 вращения определяет траекторию инструмента для машины.
Свободное перемещение центра вращения 620 должно быть по поперечной оси машины, например, соответствующей задней кромке экструдирования пресс–формы в машине для укладки дорожного покрытия, гарантирует, что существующая кромка является касательной к траектории 622 вращения как на прямых, так и искривленных участках. Скольжение центра вращения 620 по направлению к позиции 624 передней гусеницы может перемещать его по направлению, например, к режущей кромке обрезной головки, и, таким образом, разрешает обрезать сегменты компактного радиуса перед процессом экструдирования.
По меньшей мере, в одном варианте осуществления, скольжение центра вращения 620 внутрь и наружу по поперечной оси кромки экструдирования пресс–формы делает возможным вычислять целевые углы гусениц для радиуса любого размера.
По меньшей мере, в одном варианте осуществления целевые углы гусениц, скорость вращающего движения и направление для любого числа гусениц 602, 608, 614 являются известными для заданного центра вращения и сопоставляются посредством набора функций. Например, для траектории 622 вращения, соответствующей радиусу 0,61 метра (2 фута) поворота влево (центр вращения 620 находится в 0,61 метра влево от верхней тыльной стороны бордюра), передние гусеницы 602, 614 требуется поворачивать влево (отрицательное отклонение от соответствующих нейтральных передних ориентаций 604, 616), а заднюю гусеницу 608 требуется поворачивать вправо (положительное отклонение от соответствующей нейтральной передней ориентации 610). Кроме того, все гусеницы 602, 608, 616 движутся с разными скоростями на основе радиуса траектории, которой следуют такая гусеница 602, 608, 614; например, левая передняя гусеница 602 может двигаться по траектории с радиусом 4,5 метра (14,7 фута), правая передняя гусеница 614 может двигаться по траектории с радиусом 4,66 метра (15,3 фута), а левая задняя гусеница 608 может двигаться по траектории с радиусом 2 метра (6,6 фута).
В таком примерном варианте осуществления машина может двигаться передним или задним ходом. При движении отношение значений радиуса предоставляет целевое отношение скоростей движения; в частности, если правая передняя гусеница 614 должна двигаться в 2,3 раза быстрее левой передней гусеницы 602, а левая передняя гусеница 602 движется в 2,2 раза быстрее левой задней гусеницы 608.
Если оператор задает скорость движения левой задней гусеницы 608 в 2 м/мин (6,6 фут/мин), система будет автоматически устанавливать левую переднюю гусеницу 602 в 4,5 м/мин (14,7 фут/мин), а правую переднюю гусеницу 614 в 4,66 м/мин (15,3 фут/мин). Отношения поддерживаются для позиции инструмента или пресс–формы. При сдвиге таким образом его скорость уменьшается приблизительно на 1/3 до приблизительно 0,61 м/мин (2 фут/мин). Если постоянная, конкретная скорость инструмента является желательной, целевые скорости гусениц могут быть определены и заданы соответствующим образом.
По меньшей мере, в одном варианте осуществления система управления может включать в себя относительные функции для инструмента и гусениц 602, 608, 614, так что оператор может задавать гусеницу и скорость для любой гусеницы 602, 608, 614 или инструмента, и соответствующие отклонения гусеницы и скорости могут быть выведены автоматически.
По меньшей мере, в одном варианте осуществления бортовые датчики обнаруживают перепозиционирование в реальном времени и обновляют целевые углы гусениц немедленно для изменения радиуса или позиций гусениц. По меньшей мере, в одном варианте осуществления оператор вводит значения X, Y с помощью стандартного измерения рулеткой соотношения между компонентами. Поскольку радиус может динамически изменяться, целевые углы всегда обновляются.
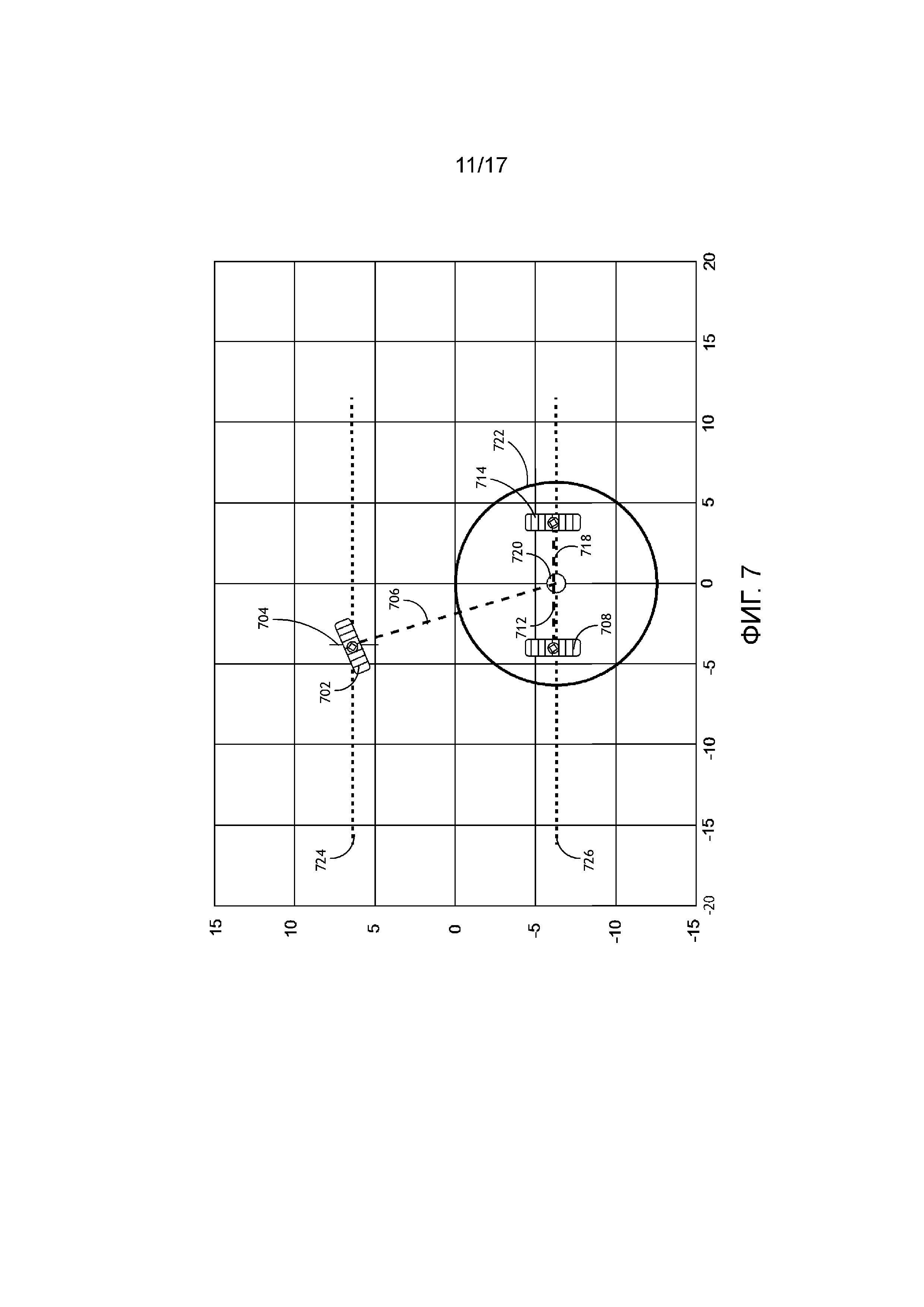
Обращаясь к фиг. 7, показано схематичное представление многогусеничной строительной машины, использующей переднее руление согласно вариантам осуществления идей изобретения, описываемых в данном документе. По меньшей мере, в одном варианте осуществления многогусеничная строительная машина включает в себя множество гусениц 702, 708, 714 или колес, ограниченных позицией 724 передней гусеницы и позицией 726 задней гусеницы. По меньшей мере, в одном варианте осуществления одна или более из множества гусениц 702, 708, 714 являются зафиксированными в ориентации, в то время как одна или более из множества гусениц 702, 708, 714 могут поворачиваться; на фиг. 7 передняя гусеница 702 конфигурируется, чтобы вращаться, в то время как задние гусеницы 708, 714 являются зафиксированными. Поворачивающаяся передняя гусеница 702 ассоциируется с нейтральной передней ориентацией 704, от которой отклонение гусеницы может быть измерено. Такое отклонение основывается на характерном векторе 706 гусеницы, в то время как зафиксированные гусеницы 708, 714 могут также определять, в целом, неподвижные характерные векторы 712, 718 гусениц из центра вращения 720, чтобы создавать траекторию 722 вращения. Фиг. 7 иллюстрирует центр поворота 720 в габаритной площади машины. Кроме того, отклонение передней гусеницы 702 может определять местоположение центра поворота 720 и диаметр траектории 722 вращения, в то время как направление зафиксированных гусениц 708, 714 (либо вперед, либо назад) может соответствовать относительному местоположению гусеницы 708, 714 относительно центра поворота 722. По меньшей мере, в одном варианте осуществления траектория 722 вращения определяет траекторию инструмента для машины.
Обращаясь к фиг. 7, в частности, и фиг. 8–9 и фиг. 10–11 в целом; некоторые машины, даже машины с конциклической конфигурацией, могут не иметь полного диапазона всех углов поворота управляемой гусеницы, требуемых, чтобы удовлетворять условиям контрвращения. Например, машина, показанная на фиг. 7, имеет треугольную конциклическую компоновку и может описывать окружность, чтобы иметь свой центр вращения 720 в центре описанной окружности; однако, задние две гусеницы 708, 714 могут иметь ограниченный угол поворота, так что является невозможным, чтобы центр вращения 700 был в центре описанной окружности. В таких конфигурациях перемещение центра вращения 720 в среднюю точку между двумя задними гусеницами 708, 714 будет все еще поворачивать машину вокруг точки внутри кузова машины, однако, потребуется большая площадь по сравнению с контрвращением. Поскольку расстояние от центра вращения 720 до передней гусеницы 702 и задних гусениц 708, 714 является различным, передняя гусеница 702 вращается быстрее вперед по сравнению с левой задней гусеницей 708; кроме того, правая задняя гусеница 714 вращается в обратном направлении с той же скоростью, что и левая задняя гусеница 708.
По меньшей мере, в одном варианте осуществления любое вращение машины вокруг точки в пределах ее шасси может удовлетворять ожидание пользователя, что машина имеет минимальную площадь для поворота, даже если она не является описанной окружностью. В таком варианте осуществления машина может иметь неконциклическую форму, но такая конфигурация потребует, по меньшей мере, одной отличающейся скорости гусеницы по сравнению с остальными гусеницами 702, 708, 714. Кроме того, такие машины обязательно имеют, по меньшей мере, одну гусеницу, движущуюся в противоположном направлении по сравнению с остальными гусеницами 702, 708, 714. Для таких машин всего лишь с одним контуром хода такие различающиеся направления гусениц потребуют ручной переконфигурации гидравлического контура хода, чтобы реверсировать направление движения желаемых гусениц 702, 708, 714.
Альтернативно, если возможно поворачивать каждую гусеницу 702, 708, 714 способом скоординированного руления, т.е. передняя гусеница 702 поворачивает влево, а задние гусеницы 708, 714 поворачивают вправо на величину корректировки; тем самым, является возможным поддерживать прямой ход на всех гусеницах 702, 708, 714 в пределах описанной окружности.
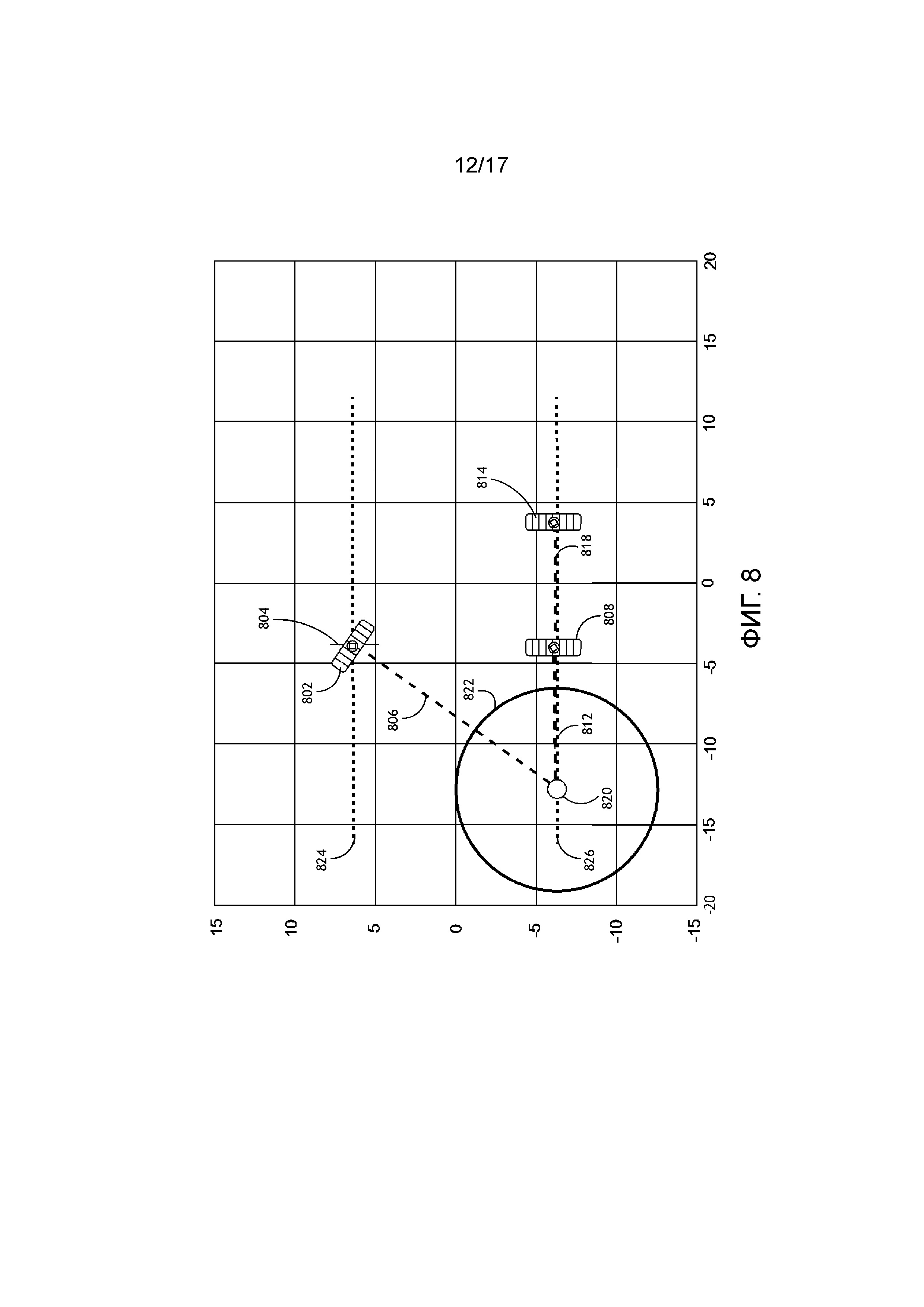
Обращаясь к фиг. 8, показано схематичное представление многогусеничной строительной машины, использующей переднее руление согласно вариантам осуществления идей изобретения, описываемых в данном документе. По меньшей мере, в одном варианте осуществления многогусеничная строительная машина включает в себя множество гусениц 802, 808, 814 или колес, ограниченных позицией 824 передней гусеницы и позицией 826 задней гусеницы. По меньшей мере, в одном варианте осуществления одна или более из множества гусениц 802, 808, 814 являются зафиксированными в ориентации, в то время как одна или более из множества гусениц 802, 808, 814 могут поворачиваться; на фиг. 8 передняя гусеница 802 конфигурируется, чтобы поворачиваться, в то время как задние гусеницы 808, 814 являются зафиксированными. Поворачивающаяся передняя гусеница 802 ассоциируется с нейтральной передней ориентацией 804, от которой отклонение гусеницы может быть измерено. Такое отклонение основывается на характерном векторе 806 гусеницы, в то время как зафиксированные гусеницы 808, 814 могут также определять характерные векторы 812, 818 гусениц из центра вращения 820, чтобы создавать траекторию 822 вращения. Фиг. 8 иллюстрирует центр вращения 820, внешний по отношению к габаритной площади машины. Отклонение передней гусеницы 802 определяет местоположение центра вращения 820. По меньшей мере, в одном варианте осуществления траектория 822 вращения определяет траекторию инструмента для машины.
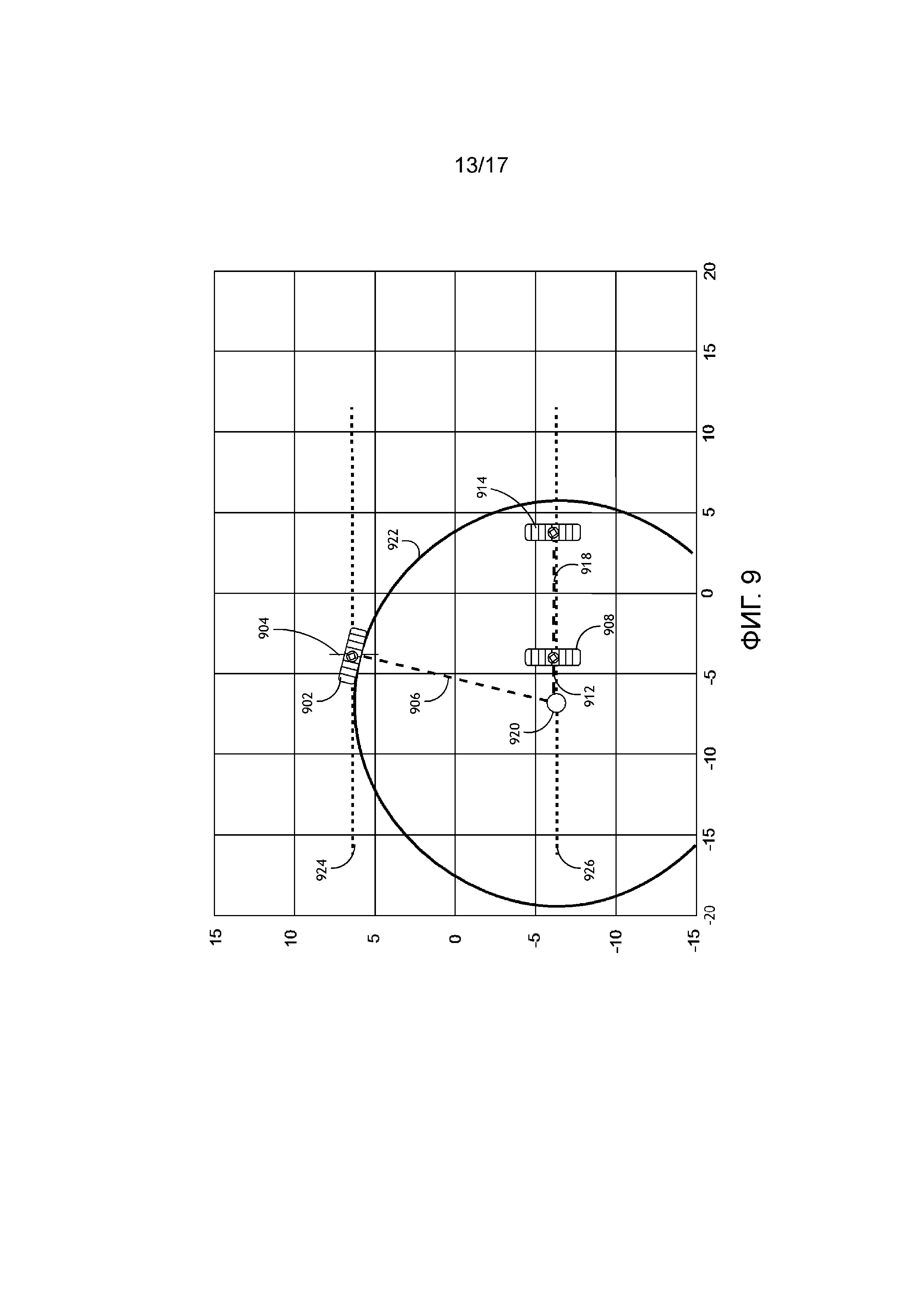
Обращаясь к фиг. 9, показано схематичное представление многогусеничной строительной машины, использующей переднее руление согласно вариантам осуществления идей изобретения, описываемых в данном документе. По меньшей мере, в одном варианте осуществления многогусеничная строительная машина включает в себя множество гусениц 902, 908, 914 или колес, ограниченных позицией 924 передней гусеницы и позицией 926 задней гусеницы. По меньшей мере, в одном варианте осуществления одна или более из множества гусениц 902, 908, 914 являются зафиксированными в ориентации, в то время как одна или более из множества гусениц 902, 908, 914 могут поворачиваться; на фиг. 9 передняя гусеница 902 конфигурируется, чтобы поворачиваться, в то время как задние гусеницы 908, 914 являются зафиксированными. Поворачивающаяся передняя гусеница 902 ассоциируется с нейтральной передней ориентацией 904, от которой отклонение гусеницы может быть измерено. Такое отклонение основывается на характерном векторе 906 гусеницы, в то время как зафиксированные гусеницы 908, 914 могут также определять характерные векторы 912, 918 гусениц из центра вращения 920, чтобы создавать траекторию 922 вращения. Фиг. 9 иллюстрирует центр вращения 920, внешний по отношению к габаритной площади машины, в то время как траектория 922 вращения практически соответствует траектории передней гусеницы 902. По меньшей мере, в одном варианте осуществления траектория 922 вращения определяет траекторию инструмента для машины.
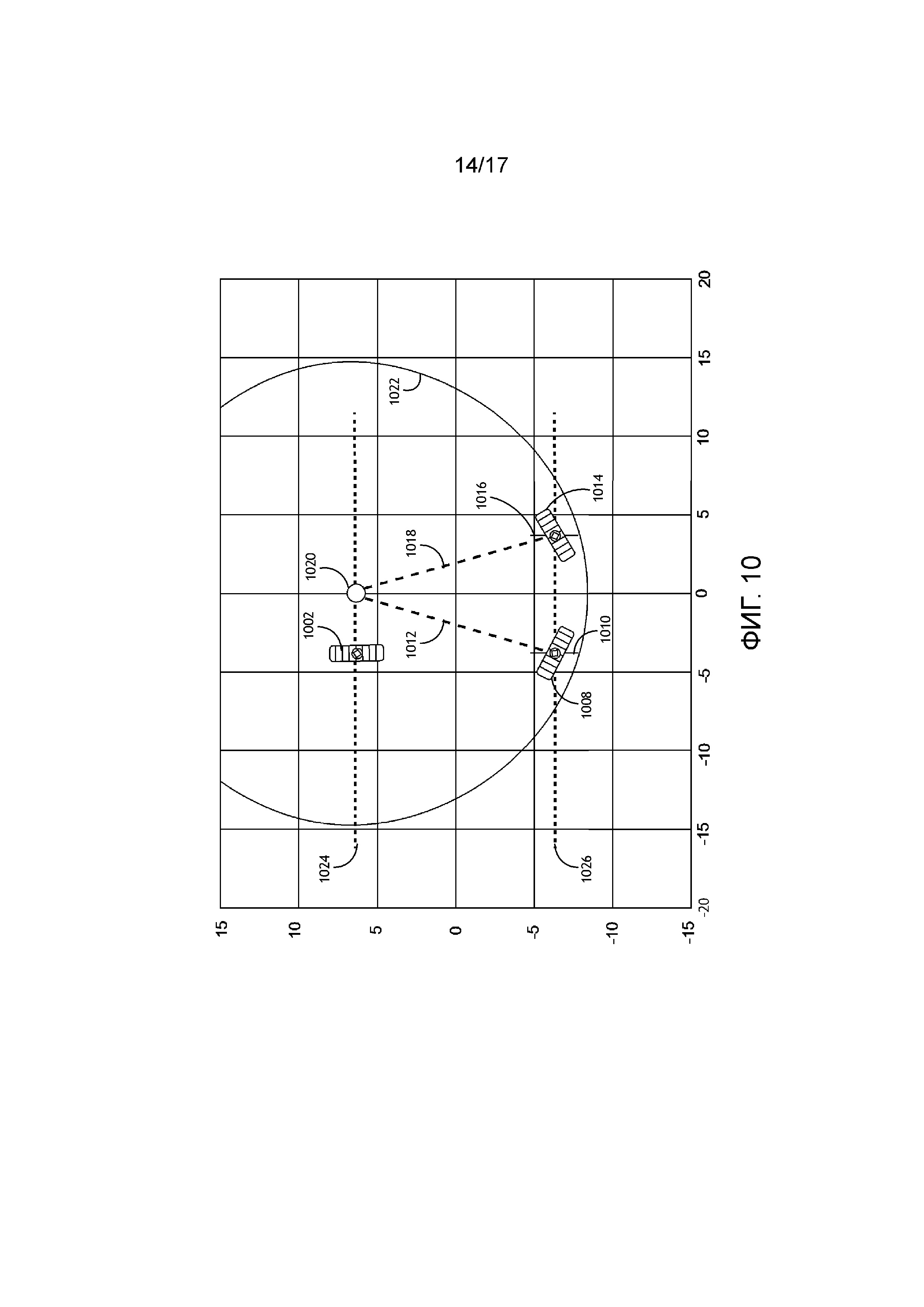
Обращаясь к фиг. 10, показано схематичное представление многогусеничной строительной машины, использующей заднее руление согласно вариантам осуществления идей изобретения, описываемых в данном документе. По меньшей мере, в одном варианте осуществления многогусеничная строительная машина включает в себя множество гусениц 1002, 1008, 1014 или колес, ограниченных позицией 1024 передней гусеницы и позицией 1026 задней гусеницы. По меньшей мере, в одном варианте осуществления одна или более из множества гусениц 1002, 1008, 1014 являются зафиксированными в ориентации, в то время как одна или более из множества гусениц 1002, 1008, 1014 могут поворачиваться; на фиг. 10 передняя гусеница 1002 является зафиксированной, в то время как задние гусеницы __08, 1014 конфигурируются, чтобы поворачиваться. Поворачивающиеся задние гусеницы 1008, 1014, каждая, ассоциируются с нейтральной передней ориентацией 1010, 1016, от которой отклонение гусеницы может быть измерено. Такие отклонения основываются на характерных векторах 1012, 1018 гусениц от центра 1020 вращения, чтобы создавать траекторию 1022 вращения. Фиг. 10 иллюстрирует центр 1020 вращения вдоль позиции 1024 передней гусеницы. По меньшей мере, в одном варианте осуществления траектория 1022 вращения определяет траекторию инструмента для машины.
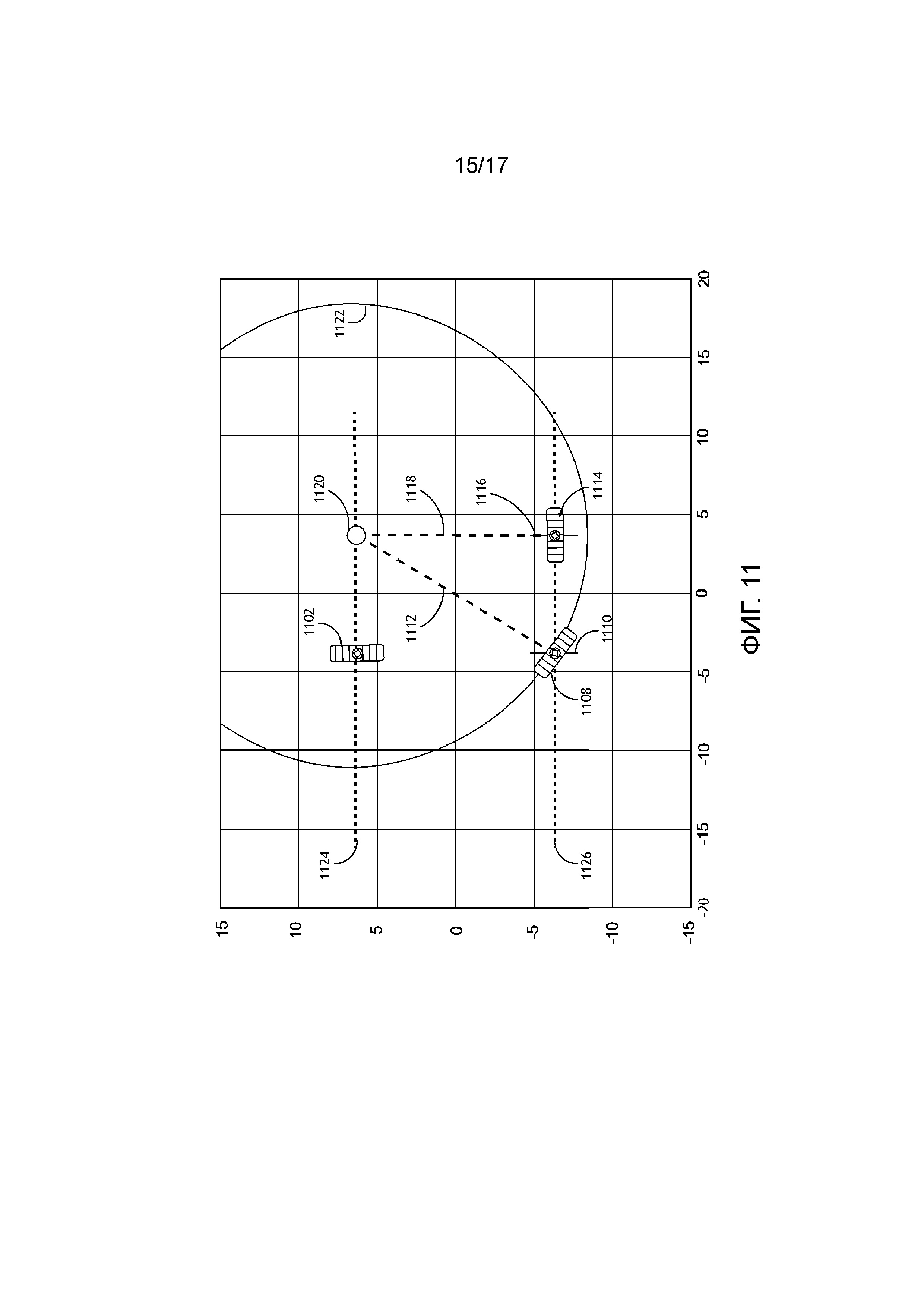
Обращаясь к фиг. 11, показано схематичное представление многогусеничной строительной машины, использующей заднее руление согласно вариантам осуществления идей изобретения, описываемых в данном документе. По меньшей мере, в одном варианте осуществления многогусеничная строительная машина включает в себя множество гусениц 1102, 1108, 1114 или колес, ограниченных позицией 1124 передней гусеницы и позицией 1126 задней гусеницы. По меньшей мере, в одном варианте осуществления одна или более из множества гусениц 1102, 1108, 1114 являются зафиксированными в ориентации, в то время как одна или более из множества гусениц 1102, 1108, 1114 могут поворачиваться; на фиг. 11 передняя гусеница 1102 является зафиксированной, в то время как задние гусеницы __08, 1114 конфигурируются, чтобы поворачиваться. Поворачивающиеся задние гусеницы 1108, 1114, каждая, ассоциируются с нейтральной передней ориентацией 1110, 1116, от которой отклонение гусеницы может быть измерено. Такие отклонения основываются на характерных векторах 1112, 1118 гусениц от центра вращения 1120, чтобы создавать траекторию 1122 вращения. Фиг. 11 иллюстрирует центр вращения 1120 вдоль позиции 1124 передней гусеницы и вдоль нейтральной передней ориентации 1116, ассоциированной с ортогональной задней гусеницей 1114. По меньшей мере, в одном варианте осуществления траектория 1122 вращения определяет траекторию инструмента для машины.
Относительно конкретных вариантов осуществления, иллюстрированных на фиг. 5–11, дуги соответствующих траекторий 522, 622, __22, 722, 822, 922, 1022, 1122 вращения могут определять более значительную полную траекторию, предписанную посредством периодических регулировок в отклонении соответствующих гусениц 502, 508, 514, 602, 608, 614, 702, 708, 714, 802, 808, 814, 902, 908, 914, 1002, 1008, 1014, 1102, 1108, 1114, чтобы изменять центр вращения 520, 620, __20, 720, 820, 920, 1020, 1120 и диаметр соответствующей траектории 522, 622, __22, 722, 822, 922, 1022, 1122 вращения. Кроме того, составная траектория может быть дополнительно определена посредством одной или более кривых с переменными радиусами и прямолинейных участков, соответствующих движению боком.
Обращаясь к фиг. 12, показан график отклонений 1200, 1202, 1204 управляемых гусениц, ассоциированных с расстоянием согласно вариантам осуществления идей изобретения, описанных в данном документе. Отклонения 1200, 1202, 1204 управляемых гусениц ассоциируются с радиусом соответствующей кривой, созданной такими отклонениями 1200, 1202, 1204. Различные варианты осуществления могут использовать различные отношения отклонений 1200, 1202, 1204 к кривизне траектории, или сочетания таких отношений, чтобы создавать желаемую траекторию, состоящую из различных дуговых отрезков. Кроме того, такие отношения могут содержать механизм для корректирующей обратной связи посредством идентификации различия между фактической траекторией и желаемой траекторией, преобразования такого различия в скорректированную кривизну, предписанную соответствующими корректировками в отклонениях 1200, 1202, 1204 гусениц.
В автоматической системе руления погрешности отслеживания траектории, как правило, корректируются посредством вычисления погрешности отслеживания траектории относительно некоторого устройства позиционирования, такого как шнуровой датчик, электронный автоматический тахометр, спутниковая система позиционирования и т.д., и регулировки отклонения 1200, 1202, 1204 гусеницы и/или скорости, чтобы перемещать машину в направлении для минимизации погрешности (управление с замкнутым контуром). Такая регулировка может быть выполнена в прямом или обратном направлении, но требует некоторого движения для перемещения назад по направлению к желаемой траектории. Погрешность отслеживания траектории вводится в функцию влияния руления, которая создает угол атаки замкнутого контура.
y(угол) = f(миллиметры, параметры настройки)
Функция влияния руления может быть смягченной или ослабленной, т.е. 3 мм (1/8 дюйма) соответствует 1 градусу, или возбужденной и агрессивной, например, 3 мм (1/8 дюйма) соответствует 10 градусам. Для прямых и почти прямых траекторий только погрешности отслеживания траектории и управление с замкнутым контуром могут в достаточной степени рулить машиной, чтобы поддерживать желаемое выравнивание траектории.
Для каждой конкретной конфигурации машины, например, с пресс–формой и гусеницами, которые все выступают наружу, и задними управляемыми гусеницами в ряд с существующей пресс–формой, только задняя гусеница нуждается в регулировке руления, чтобы корректировать погрешность отслеживания траектории. Передний шнуровой датчик для такой машины должен быть точно спозиционирован продольно (спереди назад) и вертикально, чтобы делать вышеупомянутую функцию удовлетворяющей максимальному углу гусеницы для предварительно запрограммированной погрешности отслеживания траектории.
Когда задняя управляемая гусеница не находится в ряд с инструментом, требуется ненулевой угол, который может быть создан, только если погрешность отслеживания траектории присутствует. Такое требование конфликтует с желанием минимизировать погрешности отслеживания траектории.
Система, использующая варианты осуществления настоящего изобретения, может корректировать погрешности отслеживания траектории, сначала поворачивая каждую гусеницу на целевой угол атаки (разомкнутый контур). Когда погрешности отслеживания траектории измеряются, например, посредством шнура, 3D и т.д. и преобразуются в угол отклонения атаки, угол атаки для каждой гусеницы устанавливается в суммирование углов. Например, когда угол левой передней гусеницы устанавливается в 67 градусов, а угол правой передней гусеницы устанавливается в 28 градусов. Система затем измеряет погрешность отслеживания траектории 1/2 дюйма и настраивает или сопоставляет эту погрешность с углом отклонения атаки в 4 градуса.
Руление с управлением Акерманна будет применять этот угол на центральной линии шасси, где внешняя сторона будет принимать корректировку 2 градуса, а внутренняя сторона будет принимать корректировку 6 градусов. В зависимости от направления погрешности результирующие скорректированные углы будут равны 73 и 30 градусов или 61 и 26 градусов. Если задняя управляемая гусеница не имеет погрешности и дополнительного отклонения атаки, не будет корректировки в отношении задней гусеницы, однако, она может также иметь погрешность отслеживания траектории, которая существует в том или ином направлении (левая или правая сторона желаемой траектории).
Что касается малых (небольших) погрешностей отслеживания траектории и, таким образом, небольших углов отклонения атаки, гусеницы и скорости движения остаются хорошо синхронизированными, и система рулевого управления остается устойчивой; однако, методология Акерманна не гарантирует общего центра вращения для более значительных погрешностей.
По меньшей мере, в одном варианте осуществления способ корректировки погрешностей отслеживания траектории включает в себя измерение погрешностей отслеживания траектории как расстояния и преобразование погрешности расстояния в углы отклонения атаки в контрольных точках на машине (т.е., передняя и задняя сторона шасси, передняя и задняя сторона пресс–формы и т.д.). Погрешности могут быть нулевыми, быть в одинаковом направлении, различных направлениях или любым их сочетанием.
После того как погрешность измерена, целевые углы контрольных точек вычисляются из одних и тех же контрольных точек. Целевые углы и углы отклонения атаки складываются, чтобы создавать объединенные углы атаки. На основе позиций контрольных точек и объединенного угла атаки синхронизированный центр вращения вычисляется из решения пересечения линий. Целевые углы гусениц и скорости при вращениях определяются на основе обновленного синхронизированного центра вращения. Целевые углы гусениц и скорости движения затем реализуются посредством контроллера, чтобы минимизировать погрешность отслеживания траектории.
В некоторых вариантах осуществления система, реализующая способы, проверяет углы и скорости движения, чтобы гарантировать, что они остаются синхронизированными в предварительно определенном допуске и модифицировать целевые значения соответственным образом.
В некоторых вариантах осуществления, для некоторых форм и настроек является желательным допускать погрешности отслеживания траектории для улучшенных темпов производства, перемещая машину быстрее. Такая система может быть спроектирована с такой доступной опцией, и когда она выбирается, вторичная цель может сглаживать переходы между элементами со значительно различающимися радиусами (спираль).
Обращаясь к фиг. 13, показана блок–схема последовательности операций способа для руления машиной согласно вариантам осуществления идей изобретения, описанных в данном документе. Радиус траектории принимается 1300, либо из базы данных, либо посредством операторского ввода. Для спиральных переходов или траекторий с переменным радиусом текущий активный радиус задается 1302. Погрешность руления измеряется 1304 на основе известной позиции машины и одной или более контрольных отметок. Угол погрешности руления добавляется 1306 к целевому углу радиуса в точке управления, и активная точка вращения вычисляется 1308. На основе активной точки вращения целевые углы траектории вычисляются или иначе определяются 1310 со ссылкой на таблицу или набор функций и сверяются с известными ограничениями машины; если ограничения превышаются, угол гусеницы может быть повторно вычислен на основе обновленного параметра до тех пор, пока углы гусеницы не будут в соответствующих пределах. Целевые углы гусениц сравниваются 1312 с текущими активными углами, чтобы идентифицировать максимальную абсолютную погрешность и определять ведущую гусеницу, чтобы приводить в действие корректирующую процедуру. Скорости для каждой гусеницы вычисляются 1314 и применяются, и вычисляются целевые углы. Когда машина приближается к правильной траектории, переходный режим может быть применен для плавного перехода 1316 углов гусениц от корректирующих целевых углов к конкретным углам желаемой траектории, которые машина может поддерживать после корректирующего процесса. Процесс может затем повторяться при необходимости.
Считается, что идеи изобретения, описанные в данном документе, и множество присущих им преимуществ будут понятны посредством предшествующего описания вариантов осуществления описанных идей изобретения, и будет понятно, что различные изменения могут быть выполнены в форме, конструкции и компоновке его компонентов без отступления от широких рамок идей изобретения, описанных в данном документе, или без принесения в жертву всех их материальных преимуществ; и отдельные отличительные признаки из различных вариантов осуществления могут быть объединены, чтобы приходить к другим вариантам осуществления. Ранее описанная в данном документе форма является просто примерным вариантом его осуществления, замыслом последующей формулы изобретения является окружать и включать в себя такие изменения. Кроме того, любой из отличительных признаков, описанных в отношении какого–либо отдельного варианта осуществления, может быть включен в любой другой вариант осуществления.
Реферат
Изобретение относится к машинам. В способе управления рулением строительных машин принимают желаемую траекторию и определяют первый дуговой отрезок в желаемой траектории; определяют центр вращения и принимают местоположение, соответствующее желаемому центру вращения. Определяют значение срабатывания для каждого актуатора и приводят в действие актуаторы для поворота одной или более гусеницы. Определяют угол отклонения для каждой гусеницы и поворачивают гусеницами. Измеряют погрешность отслеживания траектории от желаемой траектории; преобразуют погрешность в угол отклонения в контрольных точках на строительной машине. Вычисляют целевые углы контрольных точек и добавляют целевые углы контрольной точки к углу отклонения, чтобы создавать объединенный угол атаки. Вычисляют синхронизированный центр вращения на основе пересечения линий, полученного из объединенного угла атаки и одной или более контрольных точек; поворачивают гусеницами и задают скорость движения для каждой гусеницы на основе синхронизированного центра вращения. Реализуется руление по сложным траекториям. 3 н. и 13 з.п. ф-лы, 13 ил.

Формула
Документы, цитированные в отчёте о поиске
Строительно-дорожная машина с рабочим органом
Комментарии