Способ оптимизации шума, производимого вспомогательным винтом, и характеристик винтокрылого летательного аппарата, и винтокрылый летательный аппарат - RU2601966C2
Код документа: RU2601966C2
Чертежи
Описание
Настоящее изобретение относится к способу оптимизации шума, производимого вспомогательным винтом винтокрылого летательного аппарата, и характеристик этого винтокрылого летательного аппарата, а также к винтокрылому летательному аппарату, на котором применяют этот способ.
Таким образом, изобретение относится к ограниченной технической области килей летательных аппаратов и, в частности, винтокрылых летательных аппаратов.
Например, винтокрылый летательный аппарат типа вертолета может содержать единственный несущий винт, который механически приводится во вращение, по меньшей мере, одним двигателем. При этом несущий винт обеспечивает вертикальную подъемную силу и движение вперед вертолета.
Кроме того, вертолет оборудован хвостовым вспомогательным винтом, который обеспечивает функцию противодействия крутящему моменту, создавая поперечную тягу для компенсации момента рыскания, создаваемого при вращении несущего винта. Для удобства в дальнейшем этот момент будет называться «моментом винта».
Кроме того, вспомогательный винт позволяет пилоту контролировать повороты вертолета вокруг вертикальной оси за счет создания положительной или отрицательной поперечной тяги.
Этот вспомогательный винт установлен, например, на киле, находящемся на хвостовой балке летательного аппарата. Под «килем» следует понимать аэродинамическое тело, проходящее в высоту и содержащееся по существу в вертикальной плоскости. Вместе с тем киль может иметь наклон относительно этой вертикальной плоскости передне-задней симметрии. Иногда используют выражение «вертикальный киль».
Известен не капотированный вспомогательный винт, для удобства называемый «классическим вспомогательным винтом». Классически не капотированный вспомогательный винт может быть установлен сбоку на верхнем конце киля.
Этот не капотированный вспомогательный винт является наиболее распространенным. Тем не менее можно применять и капотированный вспомогательный винт, известный, например, под товарным знаком fenestron®.
Капотированный вспомогательный винт содержит ротор, расположенный в канале, выполненном в киле вертолета. Ось симметрии канала по существу перпендикулярна к вертикальной передне-задней плоскости симметрии вертолета.
Профилированная конструкция вертикального киля вертолета охватывает упомянутый канал и, следовательно, вспомогательный винт, откуда и вытекает название «капотированный вспомогательный винт». Следует отметить, что специалисты обычно называют эту профилированную конструкцию «обтекателем». Для удобства такой винт называют «капотированным винтом».
Независимо от того, является вспомогательный винт капотированным или нет, киль участвует в контроле поворотов вокруг вертикальной оси. Действительно, киль создает поперечную несущую силу во время полета вертолета. Чем выше скорость движения вертолета, тем больше это поперечная несущая сила.
Таким образом, капотированный или не капотированный вспомогательный винт позволяет контролировать повороты вокруг вертикальной оси винтокрылого летательного аппарата. Однако вспомогательный винт может быть причиной шума, более или менее сильного в зависимости от фазы полета винтокрылого летательного аппарата.
В документе FR 2338845 представлен вертолет, оснащенный несущим винтом, вращаемым двигателем.
Этот документ FR 2338845 предусматривает «контроль рыскания вертолета при помощи капотированного винта фиксированного шага, вращаемого двигателем, тягу которого модулируют при помощи поворотных лопастей, расположенных в канале винта и на входе этого канала». Следовательно, вспомогательный винт является капотированным винтом, оснащенным лопастями, расположенными в канале капотированного винта.
В документе ЕР 0867364 предложено уменьшать шум, производимый винтокрылым летательным аппаратом, посредством снижения скорости вращения несущего винта и соответственно управлять вспомогательным винтом и подвижным элементом киля. Шаг лопастей вспомогательного винта и угол атаки подвижного элемента киля определяют на основании скорости воздуха и крутящего момента, создаваемого несущим винтом.
В документе US 6290171 предложено устройство для управления смешанной системой противодействия крутящему моменту, которая предназначена для нейтрализации крутящего момента, создаваемого несущим винтом для продвижения и создания подъемной силы вертолета, и которая содержит:
- «управляемый вспомогательный винт противодействия крутящему моменту, создающий боковую тягу противодействия крутящему моменту; и
- по меньшей мере, одну управляемую аэродинамическую поверхность управления, создающую поперечную несущую силу для противодействия крутящему моменту».
Это устройство содержит «средства управления:
- для управления, в первую очередь, упомянутой аэродинамической поверхностью таким образом, чтобы она создавала несущую силу, которая отображает часть первой команды, которую может исполнять упомянутая аэродинамическая поверхность; и
- для управления упомянутым вспомогательным винтом таким образом, чтобы комбинированное действие упомянутой аэродинамической поверхности и упомянутого вспомогательного винта отображало команду поворота вокруг вертикальной оси вертолета».
В документе ЕР 1547919 описаны способ и устройство уменьшения вибраций, создаваемых конструкцией вертолета. Эти вибрации появляются под действием аэродинамического потока, создаваемого несущим винтом, обеспечивающим вертикальную подъемную силу и движение вперед летательного аппарата, и аэродинамического воздушного потока, проходящего вдоль фюзеляжа. Способ и устройство используют измерение вибраций для определения угла атаки киля с целью создания силы противодействия измеряемым вибрациям.
В документе ЕР 0566452 описан вертолет, содержащий один несущий винт для продвижения и создания подъемной силы и систему противодействия крутящему моменту. Система противодействия крутящему моменту «содержит:
- вспомогательный винт противодействия крутящему моменту, приводимый во вращение при помощи двигателей упомянутого несущего винта и создающий управляемую боковую тягу противодействия крутящему моменту; и
- по меньшей мере, одну аэродинамическую поверхность направления, управляемую по ориентации и создающую поперечную несущую силу противодействия крутящему моменту».
При этом вертолет «содержит средства для автоматического управления углом поворота упомянутой аэродинамической поверхности направления в зависимости от угла общего шага упомянутого несущего винта и от скорости движения упомянутого вертолета».
Наконец, в документе DE 1144116 раскрыт киль, на котором установлены вспомогательный винт и управляемый по ориентации щиток.
Известен также документ US 2012/104156.
Настоящее изобретение призвано предложить способ для оптимизации шума, производимого вспомогательным винтом винтокрылого летательного аппарата.
В связи с этим объектом изобретения является способ управления аэродинамической поверхностью, расположенной на киле винтокрылого летательного аппарата, для минимизации шума, производимого вспомогательным винтом винтокрылого летательного аппарата. Этот винтокрылый летательный аппарат проходит в продольном направлении вдоль первой передне-задней плоскости, отделяющей первую сторону от второй стороны винтокрылого летательного аппарата. Таким образом, винтокрылый летательный аппарат проходит в боковом направлении от первой стороны ко второй стороне.
Кроме того, винтокрылый летательный аппарат оборудован, по меньшей мере, одним несущим винтом, при этом винтокрылый летательный аппарат оборудован также вспомогательным винтом, создающим управляемую боковую тягу для контроля движения рыскания винтокрылого летательного аппарата. Эта тяга направлена ко второй стороне для противодействия крутящему моменту, создаваемому упомянутым несущим винтом на фюзеляже винтокрылого летательного аппарата. Под выражением «эта тяга направлена ко второй стороне» следует понимать тягу, действующую в направлении от вспомогательного винта к первой стороне.
Винтокрылый летательный аппарат содержит также силовую установку для приведения во вращение несущего винта и вспомогательного винта.
Кроме того, этот винтокрылый летательный аппарат содержит киль, оснащенный, по меньшей мере, частично поворотной аэродинамической поверхностью, проходящей в высоту и создающей поперечную несущую силу, при этом аэродинамическая поверхность имеет нулевой угол поворота, когда эта аэродинамическая поверхность находится в опорной плоскости, называемой «второй плоскостью», при этом аэродинамическая поверхность имеет заднюю кромку. Таким образом, аэродинамическая поверхность содержит корпус, ограниченный по хорде передней кромкой и задней кромкой.
Таким образом, аэродинамическая поверхность расположена вертикально от нижней части к верхней части и продольно от передней кромки к задней кромке. Под выражением «когда эта аэродинамическая поверхность находится в опорной плоскости, называемой второй плоскостью» следует понимать положение, в котором находится аэродинамическая поверхность, когда опорная хорда аэродинамической поверхности находится во второй плоскости.
Согласно этому способу, углом поворота аэродинамической поверхности управляют, чтобы направить ее заднюю кромку к упомянутой второй стороне, чтобы аэродинамическая поверхность имела отрицательный угол поворота относительно второй плоскости, или направить ее заднюю кромку к упомянутой первой стороне, чтобы аэродинамическая поверхность имела положительный угол поворота относительно второй плоскости, при этом функцией аэродинамической поверхности является приведение вспомогательного винта, по меньшей мере, к одной заранее определенной рабочей точке, позволяющей оптимизировать характеристики винтокрылого летательного аппарата и минимизировать шум, создаваемый этим вспомогательным винтом, при этом упомянутое управление ориентацией упомянутой аэродинамической поверхности осуществляют, по меньшей мере, в зависимости от текущего значения параметра скорости винтокрылого летательного аппарата и от текущего значения параметра мощности упомянутой силовой установки.
Условно угол поворота считается:
- нулевым, когда аэродинамическая поверхность находится во второй плоскости,
- положительным, когда аэродинамическая поверхность смещена в угловом направлении относительно второй плоскости и повернута к первой стороне, и
- отрицательным, когда аэродинамическая поверхность смещена в угловом направлении относительно второй плоскости и повернута ко второй стороне.
Кроме того, условно считается, что положительный угол поворота больше отрицательного угла поворота.
Следовательно, аэродинамическая поверхность может осуществлять поворотное движение, чтобы иметь угол поворота в пределах от минимального отрицательного угла поворота до максимального положительного угла поворота.
Согласно способу, этим углом поворота управляют с целью приведения вспомогательного винта, по меньшей мере, к одной заранее определенной рабочей точке, позволяющей минимизировать шум, создаваемый этим вспомогательным винтом. Таким образом, аэродинамическая поверхность позволяет привести вспомогательный винт к условиям, позволяющим уменьшить влияние шума и улучшить характеристики винтокрылого летательного аппарата.
Действительно, углом поворота управляют для оптимизации тяги, создаваемой вспомогательным винтом, с точки зрения обеспечения акустического комфорта, сохраняя при этом приемлемые характеристики для винтокрылого летательного аппарата.
Таким образом, тягу хвостового винта адаптируют в зависимости от углового положения аэродинамической поверхности. Эта адаптация должна приводить этот вспомогательный винт к оптимизированным рабочим точкам. При этом аэродинамическая поверхность позволяет увеличить или уменьшить тягу, создаваемую хвостовым винтом, чтобы она удовлетворяла как задачам обеспечения характеристик винтокрылого летательного аппарата, так и задачам акустики.
Для управления углом поворота аэродинамической поверхности способ использует текущее значение параметра скорости винтокрылого летательного аппарата и текущее значение параметра мощности упомянутой силовой установки.
Этот способ можно применять как для капотированного вспомогательного винта, так и для не капотированного вспомогательного винта.
Способ может иметь один или несколько следующих отличительных признаков.
Так, параметр скорости выбирают, например, в перечне, содержащим, по меньшей мере, воздушную скорость и путевую скорость.
Эту воздушную скорость и путевую скорость измеряют при помощи первой обычной системы измерения. Например, воздушную скорость можно определить при помощи трубки Пито. Кроме того, путевую скорость можно получить при помощи системы позиционирования, известной под аббревиатурой GPS, или, например, при помощи доплеровского радара.
Силовая установка содержит, например, по меньшей мере, один двигатель и главный редуктор, установленный между каждым двигателем и несущим винтом, при этом параметр мощности можно выбирать в перечне, содержащем, по меньшей мере, общую мощность, развиваемую упомянутым, по меньшей мере, одним двигателем, общий крутящий момент, создаваемый упомянутым, по меньшей мере, одним двигателем, мощность, передаваемую на главный редуктор, крутящий момент, передаваемый на главный редуктор, крутящий момент, воздействующий на вал, приводящий в действие упомянутый несущий винт.
Эти параметры мощности силовой установки можно измерять при помощи второй обычной системы измерения. Эта система измерения может быть распространенной системой, предназначенной для определения либо собственно мощности, либо крутящего момента в зависимости от типа параметра.
Так, вторая система измерения может содержать первое устройство, измеряющее крутящий момент, передаваемый вращающимся валом. Например, это первое устройство может быть моментомером с фоническими колесами.
Когда параметром мощности является сама мощность, вторая система измерения может дополнительно содержать второе устройство, измеряющее скорость вращения упомянутого вала, например, такое как устройство с фоническим колесом.
Кроме того, вторая система измерения содержит вычислительный блок. Вычислительный блок определяет мощность посредством получения произведения упомянутого крутящего момента и упомянутой скорости вращения.
Кроме того, на винтокрылом летательном аппарате можно установить киль, полностью образованный упомянутой аэродинамической поверхностью, или на упомянутом винтокрылом летательном аппарате устанавливают неподвижный киль, оснащенный, по меньшей мере, одним подвижным щитком, представляющим собой упомянутую аэродинамическую поверхность, или же на упомянутом винтокрылом летательном аппарате устанавливают подвижный киль, оснащенный, по меньшей мере, одним подвижным щитком, которые вместе образуют упомянутую аэродинамическую поверхность. Иначе говоря, аэродинамическая поверхность может являться поворотным килем, в случае необходимости оснащенным поворотным щитком, или же может быть поворотным щитком, установленным на неподвижном киле.
Кроме того, согласно способу, можно:
- расположить упомянутую аэродинамическую поверхность с небольшим отрицательным углом поворота во время полетной фазы снижения на малой скорости винтокрылого летательного аппарата, например, под углом, составляющим от -15 градусов до 0 градусов,
- расположить упомянутую аэродинамическую поверхность с большим отрицательным углом поворота во время полетной фазы снижения на повышенной скорости винтокрылого летательного аппарата или при авторотации, например, под углом -15 градусов,
- расположить упомянутую аэродинамическую поверхность с положительным углом поворота во время полетной фазы набора высоты, например, под углом 35 градусов.
Действительно, когда аэродинамическая поверхность имеет отрицательный угол поворота, боковую несущую силу киля уменьшают, чтобы уменьшить крутящий момент, добавляющийся к крутящему моменту, действующему на фюзеляж со стороны несущего винта. Для компенсации этого уменьшения крутящего момента следует увеличить тягу, создаваемую вспомогательным винтом, чтобы поддерживать постоянным угол рыскания летательного аппарата.
Если же, наоборот, аэродинамическая поверхность имеет положительный угол поворота, боковую несущую силу киля увеличивают. Для компенсации этого увеличения крутящего момента следует уменьшить тягу, создаваемую вспомогательным винтом.
В этих условиях способ позволяет оптимизировать характеристики винтокрылого летательного аппарата и шум, производимый этим летательным аппаратом во время различных фаз полета.
Во время фазы полета на крейсерской скорости киль летательного аппарата может создавать боковую несущую силу, позволяющую получить момент, компенсирующий крутящий момент, которым действует на фюзеляж несущий винт.
В случае необходимости хвостовой винт можно остановить. Однако в этом случае капотированный вспомогательный винт может создавать шумовое явление рециркуляции текучей среды внутри канала капотированного вспомогательного винта.
Изобретением предлагается расположить в этом случае аэродинамическую поверхность с отрицательным углом поворота для уменьшения боковой несущей силы киля и привлечь работу вспомогательного винта. При этом явление рециркуляции текучей среды как минимум уменьшается.
Этот способ представляется неожиданным, так как предполагает работу вспомогательного винта, что может показаться нежелательным. Однако небольшой отрицательный угол поворота позволяет минимизировать мощность, необходимую для работы вспомогательного винта, и сохранить, таким образом, приемлемые характеристики.
Кроме того, этот способ позволяет применять киль большого размера, сводя к минимуму влияние этого киля на производимый шум во время фазы полета на крейсерской скорости. Действительно, киль участвует в работе вспомогательного винта по противодействию крутящему моменту и позволяет, таким образом, установить вспомогательный винт, требующий меньше мощности по сравнению с некоторыми известными решениями. Получаемый выигрыш в мощности можно использовать для увеличения полезной нагрузки винтокрылого летательного аппарата.
При этом можно также оптимизировать расход топлива.
Во время фазы полета при снижении киль большого размера может создавать большую боковую несущую силу, по существу эквивалентную боковой несущей силе, развиваемой на крейсерской скорости. Однако при этом, наоборот, крутящий момент винта стремится к уменьшению. Эта боковая несущая сила может создавать на фюзеляже момент, превышающий крутящий момент, которым действует несущий винт на этот фюзеляж. В результате появляется движение рыскания винтокрылого летательного аппарата вокруг вертикальной оси, которое необходимо компенсировать, создавая отрицательную тягу при помощи вспомогательного винта, чтобы поддерживать постоянный угол сноса винтокрылого летательного аппарата.
Такая отрицательная тяга является источником шума и может отрицательно сказаться на характеристиках винтокрылого летательного аппарата, в частности, на его управляемости.
В этом случае изобретением предлагается расположить аэродинамическую поверхность с большим отрицательным углом поворота, чтобы избежать создания крутящего момента, превышающего крутящий момент винта.
Для этой же цели аэродинамическую поверхность можно использовать во время фазы полета с авторотацией.
За счет этого крутящий момент, которым несущий винт действует на фюзеляж, оказывается слабым. Поэтому аэродинамическую поверхность можно расположить с большим отрицательным углом поворота, чтобы получить слабую и даже нулевую боковую несущую силу киля.
При авторотации и во время быстрого снижения хвостовой винт в основном используют для управления движением рыскания летательного аппарата, а не для компенсации возможной боковой несущей силы, создаваемой килем. Таким образом, изобретение обеспечивает оптимизированный запас контроля рыскания за счет использования вспомогательного винта. Кроме того, шум, производимый вспомогательным винтом, можно уменьшить, избегая, в частности, работы с отрицательной тягой.
Во время фазы полета с набором высоты максимально задействован несущий винт, который создает большой крутящий момент, действующий на фюзеляж. Этот крутящий момент винта обычно нейтрализуют, создавая повышенную тягу при помощи вспомогательного винта. Эта повышенная тяга является источником шума.
Кроме того, работа вспомогательного винта требует большой мощности. В этом случае мощность, подаваемая на несущий винт, уменьшается, что снижает характеристики винтокрылого летательного аппарата и, в частности, его скорость набора высоты.
В этом случае, наоборот, изобретением предлагается располагать аэродинамическую поверхность с положительным углом поворота во время фазы набора высоты. При этом вспомогательный винт может создавать меньшую тягу по сравнению с известными решениями, что позволяет уменьшить влияние вышеупомянутых недостатков.
Кроме того, аэродинамическую поверхность можно располагать с положительным углом поворота также в случае поломки вспомогательного винта. Момент, которым аэродинамическая поверхность действует на фюзеляж, позволяет компенсировать более значительный крутящий момент винта. Таким образом, изобретение позволяет уменьшить скорость снижения летательного аппарата. Действительно, изобретение позволяет снизить поступательную скорость летательного аппарата во время руления при посадке после снижения в случае поломки вспомогательного винта.
Кроме того, можно наклонить вторую плоскость по отношению к первой передне-задней плоскости таким образом, чтобы эта вторая плоскость имела положительный угол относительно первой передне-задней плоскости, при этом заднюю кромку аэродинамической поверхности направляют в первую сторону, если аэродинамическая поверхность находится во второй плоскости.
Этот отличительный признак позволяет придать аэродинамической поверхности положительный угол по отношению к воздуху, встречаемому во время поступательного полета, когда аэродинамическая поверхность имеет нулевой угол поворота.
Точно так же аэродинамической поверхности можно также придать положительный изгиб, при этом упомянутая аэродинамическая поверхность имеет изогнутую сторону, обращенную ко второй стороне.
Кроме того, можно управлять ориентацией аэродинамической поверхности при помощи правила, дающего объективный угол аэродинамической поверхности в зависимости от упомянутого параметра скорости винтокрылого летательного аппарата и от упомянутого параметра мощности силовой установки.
Это правило может содержать следующие уравнения:


где:
- «δ»: объективный угол,
- «δ1» и «δ2»: параметры вычисления,
- «δmax» и «δmin»: соответственно заранее определенные положительный пороговый угол и отрицательный пороговый угол,
- «V1», «V2», «V3», «V4»: заранее определенные параметры скорости,
- «V»: текущее значение параметра скорости,
- «W1», «W2»: заранее определенные параметры мощности,
- «W»: текущее значение параметра мощности,
- «SW»: заранее определенный параметр регулировки,
- «A» и «B»: переменные, зависящие от упомянутого параметра регулировки.
Значения «δmax», «δmin», «V1», V»2», «V3», «V4» и «W1», «W2» определяет, например, конструктор на основании испытаний и/или посредством моделирования для их адаптации к конкретному винтокрылому летательному аппарату и/или для выполнения конкретной полетной задачи.
Переменные «А» и «В» определяет конструктор на основании испытаний и/или посредством моделирования для получения заданных пороговых углов. Например, эти переменные «А» и «В» определяют при помощи следующих формул:
A=0,1×[sw] и B=-21×[sw]
Согласно первому варианту выполнения, параметр регулировки равен заранее определенному значению. При этом угол поворота, сообщаемый аэродинамической поверхности, равен объективному углу.
Например, заранее определенное значение равно нулю.
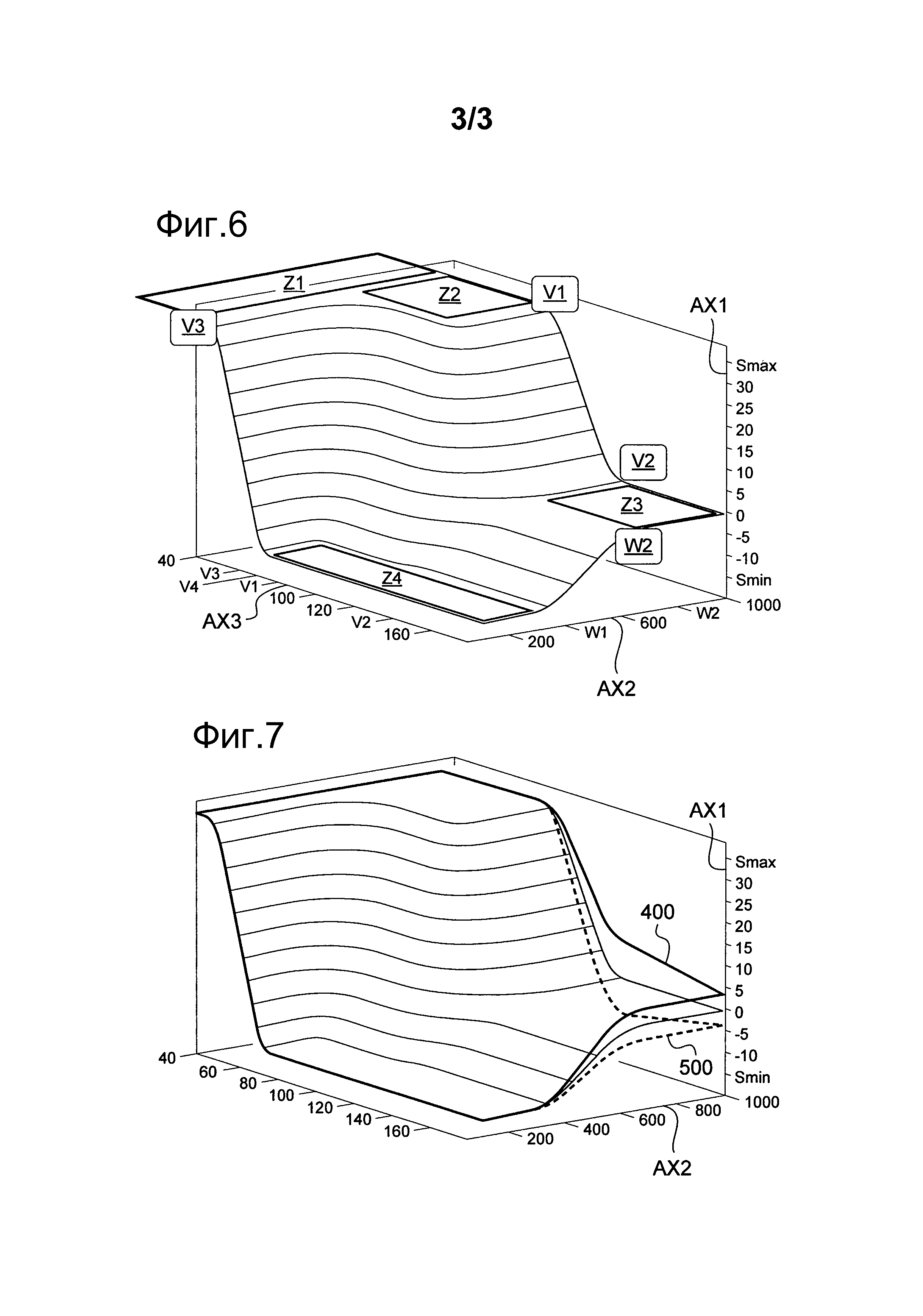
Правило позволяет определить единую область, позволяющую определять угол поворота в зависимости от текущего параметра скорости и от текущего параметра мощности.
Эта область может, в частности, содержать четыре разные рабочие зоны, соединенные переходными зонами, а именно:
- первую зону Z1, для которой угол поворота является максимальным, достигая положительного порогового угла, причем эта первая зона достигается на малой поступательной скорости,
- вторую зону Z2, для которой угол поворота является максимальным, достигая положительного порогового угла, причем эта вторая зона достигается на промежуточной поступательной скорости и на повышенной мощности, развиваемой силовой установкой,
- третью зону Z3, для которой угол поворота позиционируют со средней ориентацией, например, близкой к нулю и даже равной нулю, причем эта третья зона достигается на высокой поступательной скорости и на повышенной мощности, развиваемой силовой установкой,
- четвертую зону Z4, для которой угол поворота является небольшим, достигая отрицательного порогового значения, причем эта четвертая зона достигается на высокой поступательной скорости и на малой мощности, развиваемой силовой установкой.
Согласно второму варианту выполнения:
- определяют максимальный угол, равный объективному углу, применяя упомянутое правило и придавая параметру регулировки первое значение, например, первое значение, равное -1,
- определяют минимальный угол, равный объективному углу, применяя упомянутое правило и придавая параметру регулировки второе значение, например, второе значение, равное +1,
- измеряют текущий общий шаг лопастей упомянутого вспомогательного винта,
- увеличивают упомянутый угол поворота аэродинамической поверхности таким образом, чтобы он стремился к упомянутому максимальному углу, пока упомянутый шаг превышает заранее определенный заданный шаг, при этом угол поворота ограничивают, чтобы он был меньшим или равным максимальному углу,
- уменьшают упомянутый угол поворота аэродинамической поверхности таким образом, чтобы он стремился к упомянутому минимальному углу, пока упомянутый шаг меньше заранее определенного заданного шага, при этом угол поворота ограничивают, чтобы он превышал или был равным минимальному углу,
- упомянутый шаг автоматически изменяют параллельно с изменением упомянутого угла поворота.
Правило позволяет определить верхнюю область и нижнюю область, позволяющие определять соответственно максимальный угол и минимальный угол. Каждая область может содержать четыре описанные выше зоны.
При этом угол поворота аэродинамической поверхности ограничен этими верхней и нижней областями.
Угол поворота определяют в зависимости от текущего общего шага лопастей хвостового винта, хотя он и ограничен верхней и нижней областями.
Этот второй вариант выполнения предназначен для обеспечения работы вспомогательного винта в заранее определенной рабочей точке. Конструктор определяет шаг лопастей, приводя вспомогательный винт к этой рабочей точке.
Эта рабочая точка может приводить к созданию положительной боковой тяги вспомогательным винтом.
Если общий шаг лопастей превышает заданный шаг, увеличивают боковую несущую силу киля, увеличивая угол поворота, а именно приводя его к максимальному углу. Параллельно автоматическая система управления действует на вспомогательный винт с целью уменьшения общего шага лопастей этого вспомогательного винта.
Если общий шаг лопастей меньше заданного шага, уменьшают боковую несущую силу киля, уменьшая угол поворота, а именно приводя его к минимальному углу. Параллельно автоматическая система управления действует на вспомогательный винт с целью увеличения общего шага лопастей этого вспомогательного винта.
Кроме того, поскольку летательный поворот содержит средство ручного управления шагом лопастей вспомогательного винта, можно заблокировать изменение угла поворота, когда пилот действует на упомянутое средство управления. При этом второй вариант выполнения исключается.
Следует отметить, что на одном и том же винтокрылом летательном аппарате можно осуществлять оба предыдущих варианта выполнения, при этом пилот может выбирать необходимый вариант работы.
Кроме способа, объектом изобретения является винтокрылый летательный аппарат, расположенный вдоль первой передне-задней плоскости, отделяющей первую сторону от второй стороны винтокрылого летательного аппарата, при этом упомянутый винтокрылый летательный аппарат оборудован, по меньшей мере, одним несущим винтом, при этом винтокрылый летательный аппарат оборудован также вспомогательным винтом, создающим управляемую боковую тягу для контроля движения рыскания винтокрылого летательного аппарата, при этом упомянутая тяга направлена к второй стороне для противодействия крутящему моменту, создаваемому упомянутым несущим винтом на фюзеляже винтокрылого летательного аппарата, при этом винтокрылый летательный аппарат содержит также силовую установку для приведения во вращение несущего винта и вспомогательного винта, при этом упомянутый винтокрылый летательный аппарат содержит киль, по меньшей мере, частично оснащенный поворотной аэродинамической поверхностью, управляемой по ориентации и создающей поперечную несущую силу, будучи расположенной по высоте, при этом упомянутая аэродинамическая поверхность имеет нулевой угол поворота, когда эта аэродинамическая поверхность находится во второй плоскости, при этом упомянутая аэродинамическая поверхность имеет заднюю кромку.
Этот винтокрылый летательный аппарат содержит блок обработки, связанный со средством перемещения, поворачивающим аэродинамическую поверхность, при этом блок обработки связан с первой системой измерения текущего значения параметра скорости винтокрылого летательного аппарата и со второй системой измерения текущего значения параметра мощности упомянутой силовой установки, при этом упомянутый блок обработки применяет описанный выше способ.
Блок обработки может содержать средство вычисления, такое как процессор, исполняющий команды, записанные в энергонезависимом запоминающем устройстве, для осуществления этого способа.
Таким образом, блок обработки связывается со средством перемещения для управления ориентацией аэродинамической поверхности, направляя ее заднюю кромку к первой стороне, чтобы аэродинамическая поверхность имела положительный угол поворота относительно второй плоскости, или направляя ее заднюю кромку ко второй стороне, чтобы аэродинамическая поверхность имела отрицательный угол поворота относительно второй плоскости. Для этого блок обработки управляет углом поворота упомянутой аэродинамической поверхности, по меньшей мере, в зависимости от текущего значения параметра скорости винтокрылого летательного аппарата и от текущего значения параметра мощности упомянутой силовой установки.
Этот винтокрылый летательный аппарат может содержать поворотный киль, образующий упомянутую аэродинамическую поверхность, или неподвижный киль, оснащенный, по меньшей мере, одним щитком, представляющим собой упомянутую аэродинамическую поверхность, или подвижный киль, оснащенный, по меньшей мере, одним подвижным щитком, которые вместе представляют собой упомянутую аэродинамическую поверхность.
Кроме того, вторая плоскость может иметь положительный угол относительно первой передне-задней плоскости, при этом упомянутая задняя кромка обращена к упомянутой первой стороне, когда аэродинамическая поверхность находится в упомянутой второй плоскости.
Кроме того, аэродинамическая поверхность может иметь положительный изгиб, при этом упомянутая аэродинамическая поверхность (25) имеет изогнутую сторону, обращенную ко второй стороне.
Кроме того, блок обработки может содержать энергонезависимое запоминающее устройство, в котором записано правило, дающее объективный угол аэродинамической поверхности в зависимости от параметра скорости винтокрылого летательного аппарата и от параметра мощности силовой установки, для осуществления первого и/или второго описанных выше вариантов выполнения.
Кроме того, винтокрылый летательный аппарат может содержать средство ручного управления шагом лопастей вспомогательного винта, при этом средство управления находится на связи с блоком обработки напрямую или опосредованно через устройства измерения.
Изобретение и его преимущества будут более очевидны из нижеследующего описания примеров выполнения со ссылками на прилагаемые чертежи, на которых:
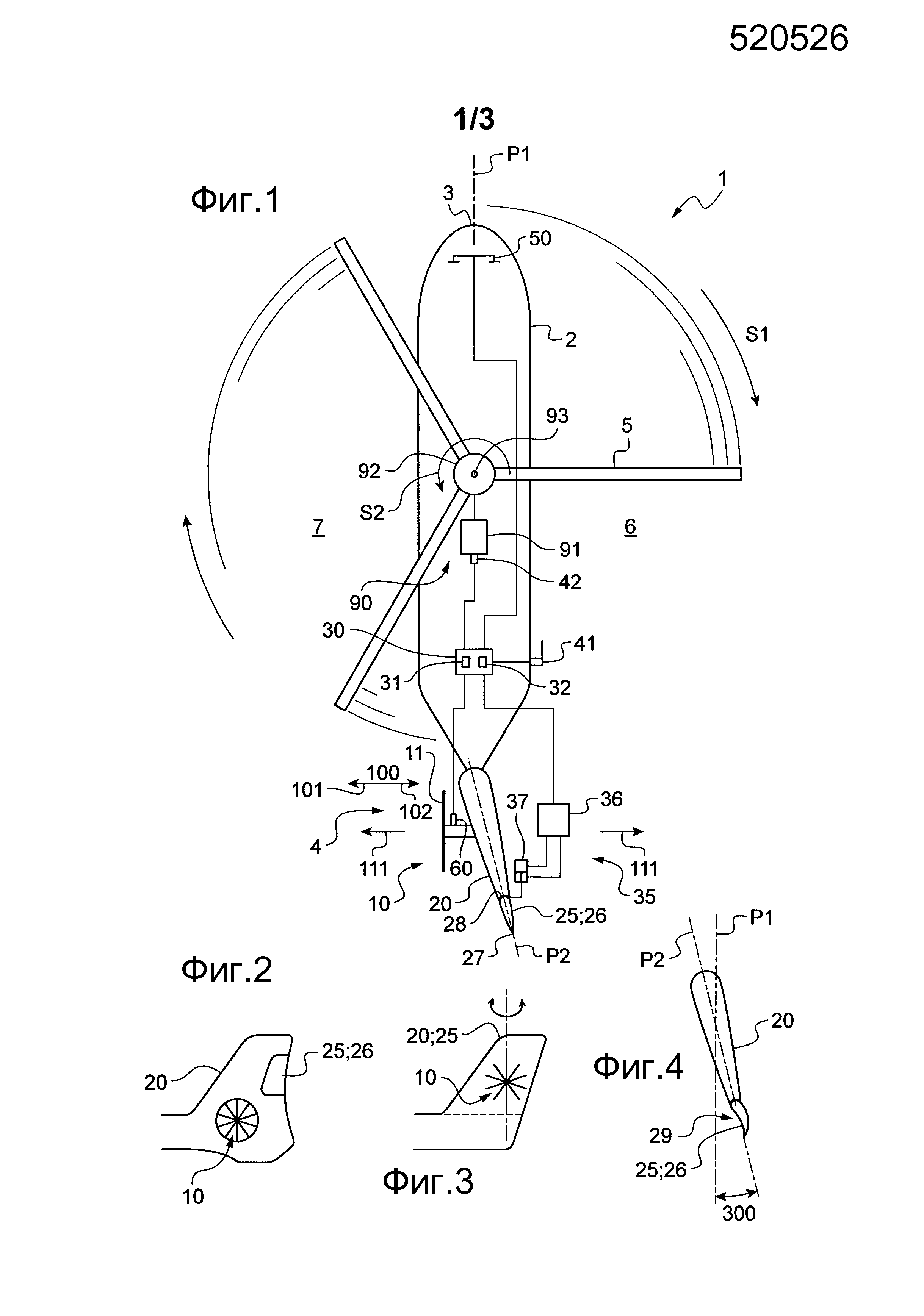
фиг. 1 - схематичный вид летательного аппарата в соответствии с изобретением.
Фиг. 2 - схематичный вид неподвижного киля с подвижной аэродинамической поверхностью.
Фиг. 3 - схематичный вид подвижного киля.
Фиг. 4 - схематичный вид изогнутой аэродинамической поверхности.
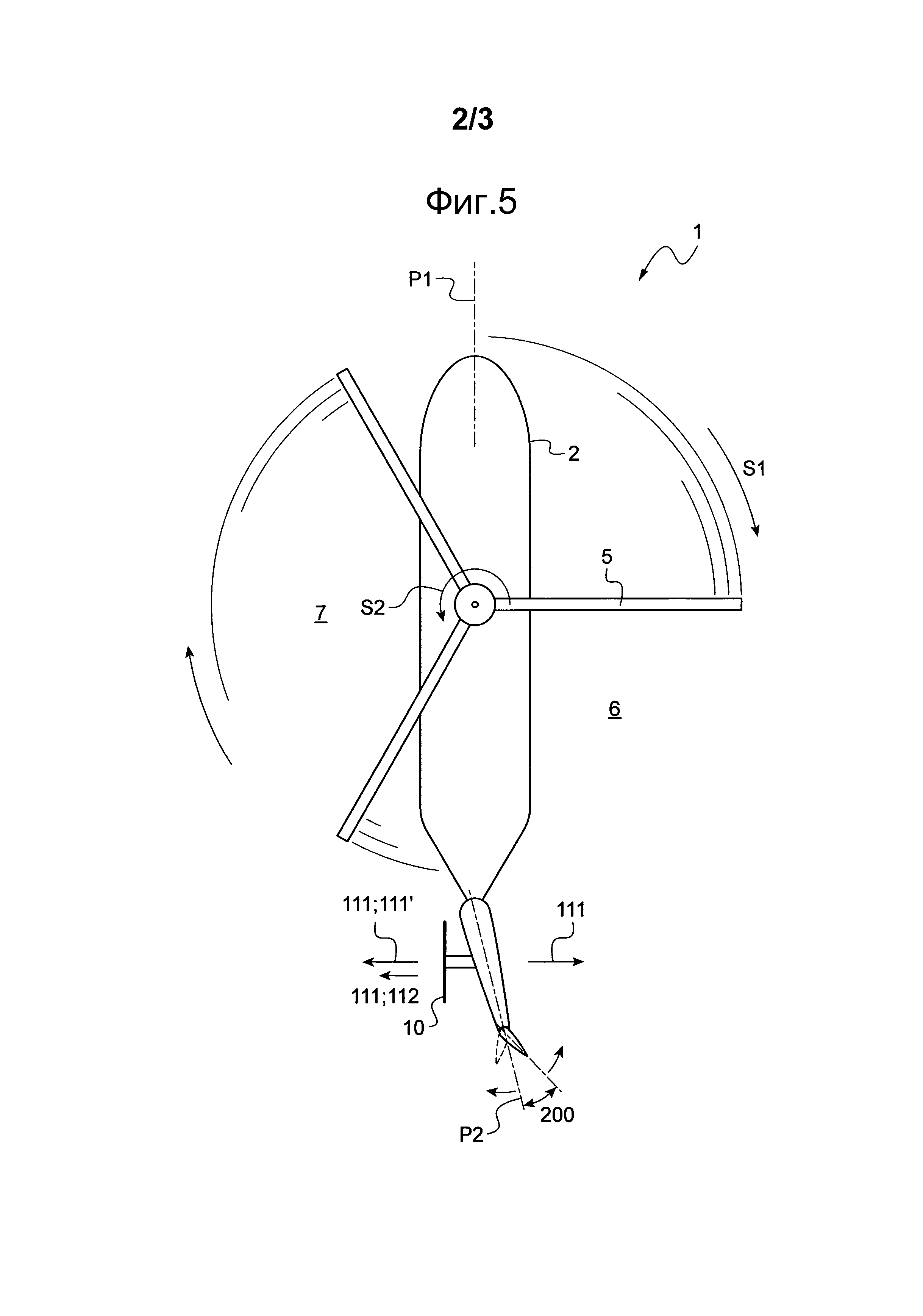
Фиг. 5 иллюстрирует позиционирование подвижной аэродинамической поверхности с положительным углом поворота или с отрицательным углом поворота.
Фиг. 6 - схема первого варианта выполнения.
Фиг. 7 - схема второго варианта выполнения.
Элементы, показанные на разных фигурах, имеют одинаковые обозначения.
На фиг. 1 показан винтокрылый летательный аппарат 1, содержащий фюзеляж 2. Этот фюзеляж 2 расположен продольно вдоль первой передне-задней плоскости симметрии Р1 от носа 3 до хвоста 4. При этом фюзеляж 2 расположен поперечно от первой стороны 6 ко второй стороне 7.
Кроме того, этот фюзеляж 2 содержит несущий винт 5, обеспечивающий, по меньшей мере, частично вертикальную подъемную силу и даже движение вперед винтокрылого летательного аппарата 1.
Несущий винт 5 содержит множество лопастей, осуществляющих вращательное движение в первом направлении S1. Во время этого движения лопасть, обычно называемая «убегающей лопастью», перемещается от первой стороны 6 ко второй стороне 7. В противоположность ей лопасть, обычно называемая «набегающей лопастью», перемещается от второй стороны 7 к первой стороне 6.
Это вращательное движение несущего винта приводит к появлению крутящего момента винта при рыскании, действующего на фюзеляж 2 во втором направлении S2, противоположном первому направлению S1. При этом крутящий момент винта стремится изменить угол сноса винтокрылого летательного аппарата.
В этих условиях винтокрылый летательный аппарат содержит, по меньшей мере, один вспомогательный винт 10, чтобы контролировать движение рыскания этого винтокрылого летательного аппарата.
Обычно вспомогательный винт 10 расположен на продольном конце винтокрылого летательного аппарата. Таким образом, вспомогательный винт находится на уровне хвоста 4 винтокрылого летательного аппарата, а именно на киле 20.
Вспомогательный винт может быть не капотированным винтом, как показано на фиг. 1, или капотированным винтом.
Вспомогательный винт 10 создает боковую тягу 100. Этой боковой тягой 100 можно управлять при помощи обычного средства 50 управления, такого как рычаг ножного управления.
Для нейтрализации крутящего момента винта боковая тяга является так называемой «положительной тягой 101», причем эта положительная тяга направлена во вторую сторону 7. Вспомогательный винт может также создавать отрицательную тягу 102, направленную в первую сторону 6.
Для приведения во вращение несущего винта 5 и вспомогательного винта 10 винтокрылый летательный аппарат содержит силовую установку 90. Эта силовая установка 90 содержит, по меньшей мере, один двигатель 91 и главный редуктор 92, который установлен между несущим винтом 5 и упомянутым, по меньшей мере, одним двигателем 91.
Кроме того, винтокрылый летательный аппарат оснащен килем, по меньшей мере, частично содержащим аэродинамическую поверхность 22, выполненную подвижной с возможностью поворота для создания регулируемой поперечной несущей силы 111, 112.
Эта аэродинамическая поверхность 25 расположена по высоте по существу в вертикальной плоскости, образующей угол с первой плоскостью Р1.
Согласно варианту, показанному на фиг. 1 и 2, винтокрылый летательный аппарат содержит неподвижный киль 20. При этом аэродинамическая поверхность 25 содержит щиток 26, шарнирно соединенной с этим неподвижным килем, представляя собой упомянутую аэродинамическую поверхность.
Согласно варианту, показанному на фиг. 3, винтокрылый летательный аппарат содержит аэродинамическую поверхность, включающую в себя подвижный киль. Киль является полностью подвижным и образует упомянутую аэродинамическую поверхность.
Согласно не показанному варианту, винтокрылый летательный аппарат содержит аэродинамическую поверхность, включающую в себя подвижный киль, на котором установлен подвижный щиток.
Кроме того, как показано на фиг. 4, в случае необходимости аэродинамическая поверхность 25 может иметь положительную кривизну, при этом вогнутая сторона аэродинамической поверхности 25 обращена ко второй стороне 7.
Независимо от варианта, как показано на фиг. 1, аэродинамическая поверхность 25 имеет угол поворота 200, который является нулевым, когда опорная хорда аэродинамической поверхности 25 находится во второй плоскости Р2. При этом аэродинамическая поверхность находится в среднем положении и может поворачиваться в одну и в другую сторону от этого среднего положения.
Понятно, что конструктор может определить путем испытаний или моделирования несущую силу, которую необходимо создать, когда аэродинамическая поверхность находится в среднем положении, чтобы позиционировать вторую плоскость Р2.
Угол поворота измеряют относительно второй плоскости Р2. Эта вторая плоскость Р2 может совпадать с первой плоскостью Р1. Вместе с тем, согласно представленному варианту, вторая плоскость Р2 может образовать положительный угол 300 относительно первой плоскости Р1.
При этом аэродинамической поверхностью можно управлять таким образом, чтобы она имела угол поворота относительно этой второй плоскости Р2.
Условно аэродинамическая поверхность 25 имеет положительный угол поворота, когда ее задняя кромка 27 отходит от второй плоскости Р2, располагаясь с первой стороны 6 винтокрылого летательного аппарата, то есть справа от второй плоскости на фиг. 1. И наоборот, аэродинамическая поверхность 25 имеет отрицательный угол поворота, когда ее задняя кромка 27 отходит от второй плоскости Р2, располагаясь со второй стороны 7 винтокрылого летательного аппарата, то есть слева от второй плоскости на фиг. 1.
Чтобы контролировать угол поворота, винтокрылый летательный аппарат содержит блок 30 обработки, связанный со средством 35 перемещения для поворачивания аэродинамической поверхности 25.
Это средство 35 перемещения может содержать гидравлический распределитель 36, сообщающийся с блоком обработки, и гидравлический силовой цилиндр 37, связанный с гидравлическим распределителем 36 и с аэродинамической поверхностью 25. Средство перемещения может также содержать, например, электронный контроллер, который управляет электромеханическим приводом.
Блок 30 обработки может содержать процессор 31, исполняющий команды, записанные в энергонезависимом запоминающем устройстве 32, для управления средством перемещения.
Блок 30 обработки связан также с первой системой 41 измерения текущего значения параметра скорости V винтокрылого летательного аппарата 1 и со второй системой 42 измерения текущего значения параметра мощности W силовой установки 90.
Параметр скорости V выбирают в перечне, содержащем, по меньшей мере, воздушную скорость и путевую скорость.
Кроме того, параметр мощности выбирают в перечне, в который входят, по меньшей мере, общая мощность, развиваемая двигателями 91 силовой установки, общий крутящий момент, создаваемый двигателями 91 силовой установки, мощность, передаваемая на главный редуктор 92, крутящий момент, передаваемый на главный редуктор 92, крутящий момент, действующий на вал 93, приводящий в действие несущий винт.
Согласно применяемому способу, углом поворота аэродинамической поверхности управляют при помощи блока 30 обработки и средства 36 перемещения в зависимости от текущего значения параметра скорости V, измеряемого первой системой измерения, и от текущего значения параметра мощности W, измеряемого второй системой измерения.
Фиг. 5 иллюстрирует работу винтокрылого летательного аппарата и применяемый способ.
Согласно изобретению, аэродинамическую поверхность 25 располагают с большим отрицательным углом поворота, например, во время фазы полета при снижении на повышенной скорости винтокрылого летательного аппарата или в режиме авторотации. Отрицательный угол поворота схематично показан пунктирной аэродинамической поверхностью.
При отрицательном угле поворота аэродинамическая поверхность стремится уменьшить боковую несущую силу, создаваемую килем, в соответствии с вектором 112. Вектор 112 этой боковой несущей силы 111 направлен во вторую сторону 7 и имеет небольшую длину и может быть даже направлен в первую сторону в случае тяги, которая становится отрицательной. Во время фазы полета с набором высоты аэродинамическую поверхность 25 располагают с положительным углом 200 поворота. Положительный угол поворота представлен аэродинамической поверхностью, показанной сплошной линией.
При положительном угле поворота аэродинамическая поверхность стремится увеличить боковую несущую силу 111, создаваемую килем, направляя ее во вторую сторону 7, чтобы нейтрализовать крутящий момент винта. В частности, вектор 111' этой боковой несущей силы направлен во вторую сторону 7 и имеет большую длину. Аэродинамическую поверхность 25 можно также расположить с небольшим отрицательным углом поворота 200 во время фазы снижения на малой скорости винтокрылого летательного аппарата.
Кроме того, определяют первую зону Z1 регулировки, при которой угол поворота является максимальным, достигая положительного порогового угла δmax. Эта первая зона Z1 достигается на поступательной скорости, меньшей скорости, называемой третьей скоростью V3.
Кроме того, определяют вторую зону Z2 регулировки, при которой угол поворота является максимальным, достигая положительного порогового угла δmax. Эта вторая зона Z2 достигается, если проверяются следующие условия:
- поступательная скорость винтокрылого летательного аппарата является промежуточной поступательной скоростью между третьей скорости V3 и скоростью, называемой первой скоростью V1, превышающей третью скорость V3,
- мощность, развиваемая силовой установкой, является повышенной мощностью, превышающей мощность, называемую второй мощностью W2.
Таким образом, блок обработки позиционирует аэродинамическую поверхность с этим положительным пороговым углом δmax, когда винтокрылый летательный аппарат находится во время полета в первой зоне Z1 или во второй зоне Z2.
Кроме того, определяют третью зону Z3, при которой угол поворота 200 равен средней ориентации, причем эта третья зона Z3 достигается при повышенной поступательной скорости и на повышенной мощности. Эта средняя ориентация близка к нулю и, например, находится в пределах от -5 градусов до +5 градусов и даже равна нулю.
Средняя ориентация находится между положительным пороговым углом δmax и отрицательным пороговым значением δmin.
Таким образом, блок обработки позиционирует аэродинамическую поверхность в средней ориентации, близкой к нулю, если проверяются два следующих условия:
- поступательная скорость винтокрылого летательного аппарата превышает вторую скорость V2, превышающую первую скорость V1,
- мощность, развиваемая силовой установкой, превышает вторую мощность W2.
Кроме того, определяют четвертую зону Z4, при которой угол поворота 200 является небольшим, достигая отрицательного порогового значения δmin. Эта четвертая зона Z4 достигается на повышенной поступательной скорости и при слабой мощности, развиваемой силовой установкой.
Таким образом, блок обработки позиционирует аэродинамическую поверхность с отрицательным пороговым значением δmin, если проверяются два следующих условия:
- поступательная скорость винтокрылого летательного аппарата превышает четвертую скорость V4, находящуюся между первой скоростью V1 и третьей скоростью V3,
- мощность, развиваемая силовой установкой, меньше первой мощности W1.
Например, блок обработки управляет ориентацией аэродинамической поверхности 25 при помощи правила L, дающего объективный угол аэродинамической поверхности 25 в зависимости от параметра скорости V винтокрылого летательного аппарата 1 и от параметра мощности W. Это правило L может соответствовать следующим уравнениям:

где:
- «δ»: объективный угол,
- «δ1» и «δ2»: параметры вычисления,
- «δmax» и «δmin»: соответственно заранее определенные положительный пороговый угол и отрицательный пороговый угол,
- «V1», «V2», «V3», «V4»: параметры первой, второй, третьей и четвертой скорости, заранее определенные конструктором,
- «V»: текущее значение параметра скорости,
- «W1», «W2»: заранее определенные параметры первой и второй мощности,
- «W»: текущее значение параметра мощности,
- «SW»: заранее определенный параметр регулировки,
- «A» и «B»: переменные, зависящие от упомянутого параметра регулировки.
Согласно варианту выполнения, показанному на фиг. 6, параметр регулировки SW равен заранее определенному значению, например 0. При этом угол поворота 200 равен объективному углу δ.
Правило L позволяет определить область, содержащую угол поворота по первой вертикальной оси АХ1, параметр мощности W по второй горизонтальной оси АХ2 и параметр скорости по третьей оси АХ3.
Это область позволяет достигать первой зоны Z1, второй зоны Z2, третьей зоны Z3, четвертой зоны Z4 и переходных интервалов между этими зонами.
При этом блок обработки применяет правило L для определения угла поворота.
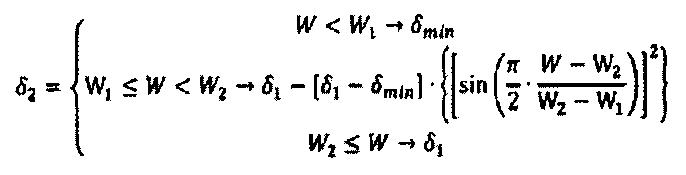
Фиг. 7 иллюстрирует второй вариант выполнения.
Согласно этому второму варианту выполнения, блок обработки определяет максимальный угол 400, равный объективному углу, применяя правило L и придавая параметру регулировки SW первое значение. При этом максимальный угол 400 приобретает форму верхней области на фиг. 7.
Кроме того, блок обработки определяет минимальный угол 500, равный объективному углу, применяя правило L и придавая параметру регулировки SW второе значение. При этом минимальный угол 500 приобретает форму нижней области на фиг. 7.
Эти нижняя и верхняя области ограничивают угол поворота.
При помощи обычного устройства измерения шага измеряют текущий общий шаг лопастей 11 вспомогательного винта 10.
Затем блок обработки управляет средством изменения шага лопастей 11, таким как автоматическая система управления. При этом блок обработки задает увеличение угла поворота 200 аэродинамической поверхности 25, приводя его к максимальному углу 400, пока упомянутый шаг превышает заранее определенный заданный шаг.
С другой стороны, блок обработки задает уменьшение угла поворота 200 аэродинамической поверхности 25, приводя его к минимальному углу 500, пока упомянутый шаг меньше заранее определенного заданного шага.
Одновременно автоматическая система управления автоматически изменяет упомянутый шаг параллельно с изменением угла поворота 200 для компенсации изменения угла поворота.
В случае необходимости блок обработки может заблокировать изменение угла поворота 200, когда пилот действует на средство 50 управления.
Этот вариант выполнения позволяет контролировать аэродинамическую поверхность прозрачно для пилота. Действие пилота на средство 50 управления останавливает при этом осуществление этого варианта выполнения, что дает пилоту полную свободу действия.
Естественно, изобретение может подвергаться различным изменениям с точки зрения его осуществления. Хотя были описаны несколько вариантов выполнения, понятно, что все возможные варианты невозможно идентифицировать избыточно. Разумеется, можно предусмотреть замену описанного средства на эквивалентное средство, не выходя за рамки настоящего изобретения.
Реферат
Изобретение относится к области авиации, в частности к конструкциям винтокрылых летательных аппаратов, и к способам минимизации шума хвостового винта. Винтокрылый летательный аппарат (1) расположен вдоль первой передне-задней плоскости (Р1), отделяющей первую сторону (6) от второй стороны (7) винтокрылого летательного аппарата (1). Упомянутый винтокрылый летательный аппарат (1) оборудован, по меньшей мере, одним несущим винтом (5), вспомогательным винтом (10) и, по меньшей мере, одной аэродинамической поверхностью (25). Упомянутый винтокрылый летательный аппарат (1) содержит блок (30) обработки, связанный со средством (35) перемещения, поворачивающим упомянутую аэродинамическую поверхность (25), при этом блок (30) обработки связан с первой системой (41) измерения текущего значения параметра скорости (V) винтокрылого летательного аппарата и со второй системой (42) измерения текущего значения параметра мощности (W) упомянутой силовой установки (90) для регулирования угла поворота аэродинамической поверхности. Достигается возможность минимизации шума, производимого хвостовым винтом, и расхода топлива. 2 н. и 15 з.п. ф-лы, 7 ил.
Формула
отличающийся тем, что углом поворота (200) упомянутой аэродинамической поверхности (25) управляют, чтобы направить ее заднюю кромку (27) к упомянутой второй стороне (7), чтобы аэродинамическая поверхность (25) имела отрицательный угол поворота (200) относительно второй плоскости (Р2), или направить ее заднюю кромку (27) к упомянутой первой стороне (6), чтобы аэродинамическая поверхность (25) имела положительный угол поворота (200) относительно второй плоскости (Р2), при этом функцией аэродинамической поверхности (25) является приведение вспомогательного винта (10), по меньшей мере, к одной заранее определенной рабочей точке, позволяющей оптимизировать характеристики винтокрылого летательного аппарата и минимизировать шум, создаваемый этим вспомогательным винтом (10), при этом упомянутое управление ориентацией упомянутой аэродинамической поверхности осуществляют, по меньшей мере, в зависимости от текущего значения параметра скорости (V) винтокрылого летательного аппарата (1) и от текущего значения параметра мощности (W) упомянутой силовой установки (90), при этом упомянутым углом поворота управляют, определяя:
- первую зону (Z1), для которой угол поворота (200) является максимальным, достигая положительного порогового угла (δmax), причем эта первая зона (Z1) достигается на малой поступательной скорости,
- вторую зону (Z2), для которой угол поворота (200) является максимальным, достигая положительного порогового угла (δmax), причем эта вторая зона (Z2) достигается на промежуточной поступательной скорости и на повышенной мощности (W2), развиваемой силовой установкой,
- третью зону (Z3), для которой угол поворота (200) позиционируют со средней ориентацией, причем эта третья зона (Z3) достигается на высокой поступательной скорости и на повышенной мощности (W2), развиваемой силовой установкой (90),
- четвертую зону (Z4), для которой угол поворота (200) является небольшим, достигая отрицательного порогового значения (δmin), причем эта четвертая зона (Z4) достигается на высокой поступательной скорости и на малой мощности (W1), развиваемой силовой установкой.


где:
- «δ»: объективный угол,
- «δ1» и «δ2»: параметры вычисления,
- «δmax» и «δmin»: соответственно заранее определенные положительный пороговый угол и отрицательный пороговый угол,
- «V1», «V2», «V3», «V4»: заранее определенные параметры скорости,
- «V»: текущее значение параметра скорости,
- «W1», «W2»: заранее определенные параметры мощности,
- «W»: текущее значение параметра мощности,
- «SW»: заранее определенный параметр регулировки,
- «А» и «В»: переменные, зависящие от упомянутого параметра регулировки.
- определяют максимальный угол (400), равный упомянутому объективному углу, применяя упомянутое правило (L) и придавая параметру регулировки (SW) первое значение,
- определяют минимальный угол (500), равный объективному углу, применяя упомянутое правило (L) и придавая параметру регулировки (SW) второе значение,
- измеряют текущий общий шаг лопастей (11) упомянутого вспомогательного винта (10),
- увеличивают упомянутый угол поворота (200) аэродинамической поверхности (25) таким образом, чтобы он стремился к упомянутому максимальному углу (400), пока упомянутый шаг превышает заранее определенный заданный шаг, при этом угол поворота (200) ограничивают, чтобы он был меньшим или равным максимальному углу (400),
- уменьшают упомянутый угол поворота (200) аэродинамической поверхности (25) таким образом, чтобы он стремился к упомянутому минимальному углу (500), пока упомянутый шаг меньше заранее определенного заданного шага, при этом угол поворота ограничивают, чтобы он превышал или был равным минимальному углу (500),
- упомянутый шаг автоматически изменяют параллельно с изменением упомянутого угла поворота (200).
отличающийся тем, что упомянутый винтокрылый летательный аппарат (1) содержит блок (30) обработки, связанный со средством (35) перемещения, перемещающим во вращении упомянутую аэродинамическую поверхность (25), при этом блок (30) обработки связан с первой системой (41) измерения текущего значения параметра скорости (V) винтокрылого летательного аппарата и со второй системой (42) измерения текущего значения параметра мощности (W) упомянутой силовой установки (90), при этом упомянутый блок (30) обработки применяет способ по любому из пп. 1-11.
Комментарии