Подъемно-транспортная машина и способ корректировки направления её движения - RU2550560C2
Код документа: RU2550560C2
Чертежи










Описание
ОБЛАСТЬ ТЕХНИКИ
[0001] Эта заявка и формула изобретения (имеет) преимущество предварительной заявки на патент США серийный №61/234, 866, поданной 18 августа 2009 года, под названием "подъемно-транспортная МАШИНА И СПОСОБ КОРРЕКТИРОВКИ НАПРАВЛЕНИЯ ее ДВИЖЕНИЯ", полное описание которой включено в данный документ в качестве ссылки. Эта заявка является частично продолжающей заявкой (CIP) Международной заявки на патент серийный №PCT/US09/66789, поданной 4 декабря 2009 года, под названием "МНОГОЗОНОВОЕ ОПОЗНАВАНИЕ ДЛЯ ПОДЪЕМНО-ТРАНСПОРТНОЙ МАШИНЫ» и является частично продолжающей заявкой (CIP) заявки на патент США серийный №12/631, 007, поданной 4 декабря 2009, полное раскрытие каждой из которых включено в данный документ в качестве ссылки. Эта заявка является родственной международной заявке №PCT/US09/69833, поданной 30 декабря 2009 года, под названием "подъемно-транспортная МАШИНА И СПОСОБ КОРРЕКТИРОВКИ НАПРАВЛЕНИЯ ее ДВИЖЕНИЯ", полное описание которой включено в данный документ в качестве ссылки.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] Низкоуровневые комплектовщики заказов широко используются на складах и в дистрибьюторских центрах для комплектации заказов. Такие комплектовщики заказов, как правило, имеют вилку для подъема и транспортировки груза и силовой агрегат с платформой, на которой может стоять и ездить оператор при управлении комплектовщиком. Силовой агрегат также имеет управляемое колесо и соответствующие тяговые механизмы и механизмы рулевого управления, например, подвижную рулевую сошку, которая соединена с управляемым колесом. Рычаг управления, соединенный с рулевой сошкой, обычно имеет средства управления, необходимые для управления комплектовщиком и приспособлением для подъема грузов.
[0003] В ходе обычных операций по комплектации заказов оператор комплектует заказы из имеющихся на складе позиций, которые находятся в зонах хранения вдоль множества проходов склада или дистрибьюторского центра. Для этого оператор подводит низкоуровневый комплектовщик к первому месту, где находятся необходимые позиции. В процессе комплектации оператор, как правило, сходит с комплектовщика, подходит к соответствующему месту и забирает заказанные позиции с соответствующих мест хранения. Затем оператор возвращается к комплектовщику и помещает эти позиции на паллету, в клеть или на иную опорную конструкцию, которая переносится при помощи вилки комплектовщика. По завершении процесса комплектации оператор направляет комплектовщик к следующему месту, откуда необходимо забрать соответствующие позиции. Описанный выше процесс повторяется до тех пор, пока весь заказ не будет укомплектован.
[0004] Нередко оператор повторяет процесс комплектации несколько сот раз для одного заказа. Более того, от оператора может потребоваться укомплектовать несколько заказов за смену. По этой причине оператор может потратить много времени на перемещение комплектовщика, что уменьшает количество времени, остающееся у оператора непосредственно на комплектацию заказа.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0005] В соответствии с различными особенностями настоящего изобретения, предложены системы, способы и компьютерные программные продукты для автоматического выполнения маневра для корректировки направления движения подъемно-транспортной машины. Контроллер на подъемно-транспортной машине получает первые сенсорные данные по меньшей мере с одного датчика, и полученные первые сенсорные данные определяют первую зону обнаружения помех, которая находится в непосредственной близости к подъемно-транспортной машине. Контроллер также получает вторые сенсорные данные по меньшей мере с одного датчика, и полученные вторые сенсорные данные определяют вторую зону обнаружения помех, которая также находится в непосредственной близости к подъемно-транспортной машине. Контроллер далее на основании полученных сенсорных данных определяет, находится ли объект по меньшей мере в первой или второй зоне обнаружения помех.
[0006] При обнаружении объекта в первой или второй зоне обнаружения помех выполняется маневр корректировки направления движения, чтобы избежать столкновения с объектом. Маневр корректировки направления движения может включать в себя определение контроллером необходимого маневра корректировки направления движения - вправо или влево по направлению движения подъемно-транспортной машины на основании полученных сенсорных данных, определяющих по меньшей мере первую и вторую зону обнаружения помех.
[0007] Если контроллер определяет, что объект находится слева от подъемно-транспортной машины, подъемно-транспортная машина выполняет маневр первой корректировки направления движения посредством автоматической корректировки направления движения вправо, т.е. корректируя направление движения машины вправо на некоторый известный угол корректировки, с отсчетом расстояния, пройденного машиной при автоматической корректировке направления движения вправо и с автоматической обратной корректировкой направления движения подъемно-транспортной машины влево, т.е. на соответствующий угол корректировки, на некоторый процент от пройденного при корректировке расстояния.
[0008] Соответственно, если контроллер определяет, что объект находится справа от подъемно-транспортной машины, подъемно-транспортная машина выполняет маневр второй корректировки направления движения посредством автоматической корректировки направления движения влево, т.е. корректируя направление движения машины влево на некоторый известный угол корректировки, с отсчетом расстояния, пройденного машиной при автоматической корректировке направления движения влево и с автоматической обратной корректировкой направления движения подъемно-транспортной машины вправо, т.е. на соответствующий угол корректировки, на некоторый процент от пройденного при корректировке расстояния. Соответственно, отсчет расстояния, пройденного машиной при корректировке направления движения, включает в себя отсчет расстояния, пройденного машиной до тех пор, пока обнаруженный объект больше не будет находиться в первой или второй зоне обнаружения помех. В одном из соответствующих примеров осуществления изобретения обратная корректировка направления движения подъемно-транспортной машины осуществляется на расстояние до половины от пройденного расстояния; и/или на угол корректировки до половины от соответствующего угла корректировки, использованного для корректировки направления движения машины. Корректировка направления движения может включать в себя плавный поворот на угол корректировки, равный заданному фиксированному значению.
[0009] По меньшей мере один дистанционный датчик может представлять собой по меньшей мере одно лазерное сканирующее устройство, по меньшей мере один ультразвуковой датчик, или комбинацию по меньшей мере одного лазерного сканирующего устройства и по меньшей мере одного ультразвукового датчика. Например, по меньшей мере одно лазерное сканирующее устройство может использоваться для проверки результатов от по меньшей мере одного ультразвукового датчика. Дистанционные датчики могут иметь по меньшей мере два выходных сигнала, указывающих, где обнаружен объект - в первой зоне обнаружения помех или во второй зоне обнаружения помех. Удобно, когда контроллер затем анализирует выходные сигналы для определения, в какой зоне обнаружен объект.
[0010] В соответствии с некоторыми примерами осуществления изобретения выполнение маневра корректировки движения может включать в себя автоматическую корректировку направления движения машины на заданный угол поворота управляемого колеса, чтобы изменение угла поворота комплектовщика в зависимости от пройденного расстояния было фиксированным. Значение угла поворота, например, может быть установлено примерно между 5 и 10 градусами.
[0011] По меньшей мере один датчик также может использоваться для определения одной или более зон обнаружения помех (как указано в настоящем описании) для обнаружения объектов, расположенных на пути следования упомянутого силового агрегата, когда упомянутый детектор при обнаружении объекта формирует сигнал расстояния, соответствующий расстоянию между обнаруженным объектом и машиной.
Машина также может иметь датчик нагрузки (как указано в настоящем описании), который формирует контроллеру сигнал массы, указывающий массу груза на приспособлении для подъема груза. Таким образом, контроллер также может получать сигнал от по меньшей мере одного датчика, включающий в себя сигнал расстояния и сигнал массы, и формировать соответствующий сигнал остановки машины или сигнал максимально разрешенной скорости, исходя из упомянутых сигналов расстояния и массы.
[0012] В другом аспекте, изобретение предусматривает способ выполнения автоматической корректировки маневрирования подъемно-транспортной машины по изобретению.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] Фиг.1 представляет собой изображение подъемно-транспортной машины с дистанционным беспроводным управлением в соответствии с различными особенностями настоящего изобретения;
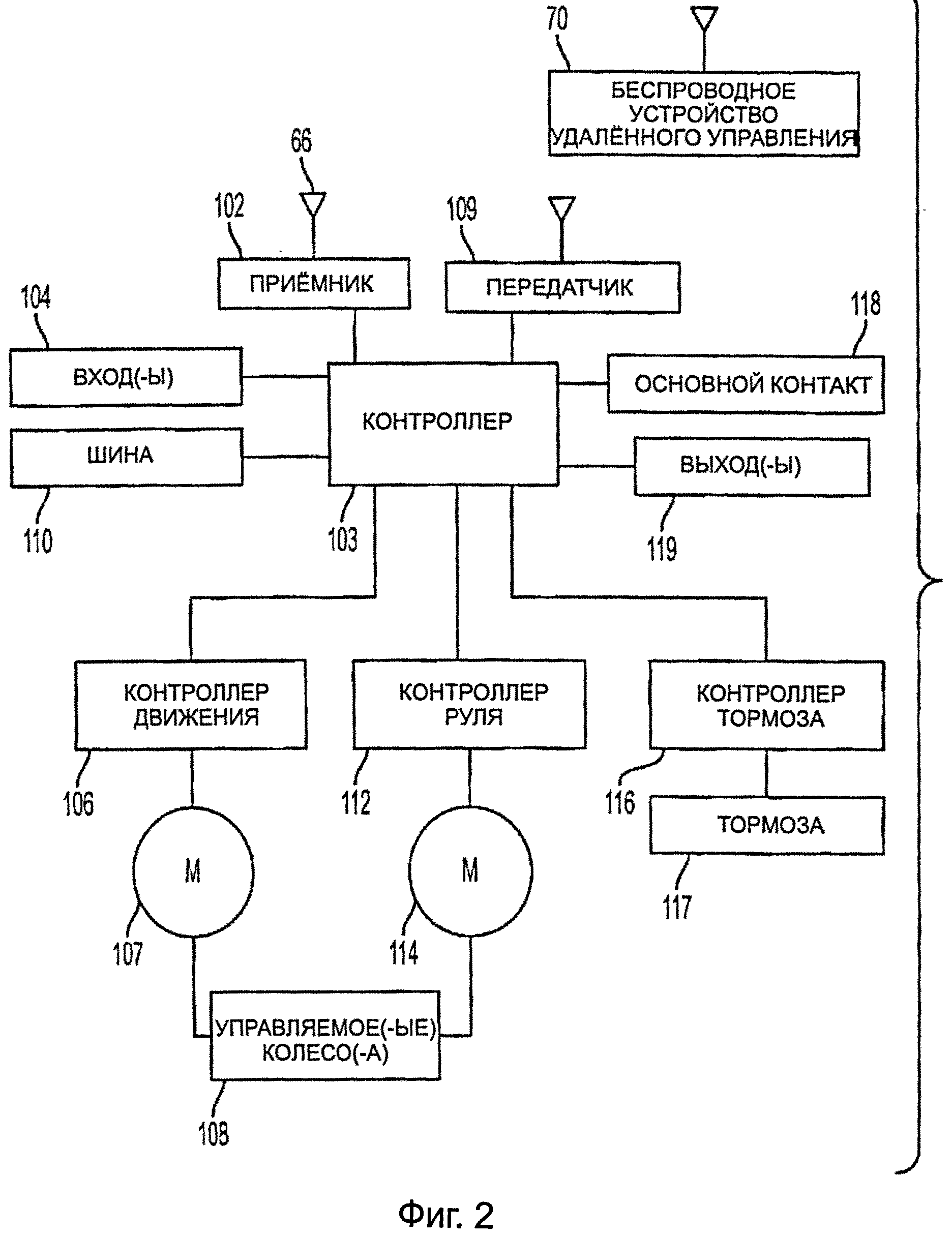
[0014] Фиг.2 представляет собой блок-схему нескольких элементов подъемно-транспортной машины с дистанционным беспроводным управлением в соответствии с различными особенностями настоящего изобретения;
[0015] Фиг.3 представляет собой блок-схему, иллюстрирующую зоны обнаружения подъемно-транспортной машины в соответствии с различными особенностями настоящего изобретения.
[0016] Фиг.4 представляет собой блок-схему, иллюстрирующую пример подхода к обнаружению объекта в соответствии с различными особенностями настоящего изобретения.
[0017] Фиг.5 представляет собой блок-схему, иллюстрирующую множество зон обнаружения подъемно-транспортной машины в соответствии с другими особенностями настоящего изобретения;
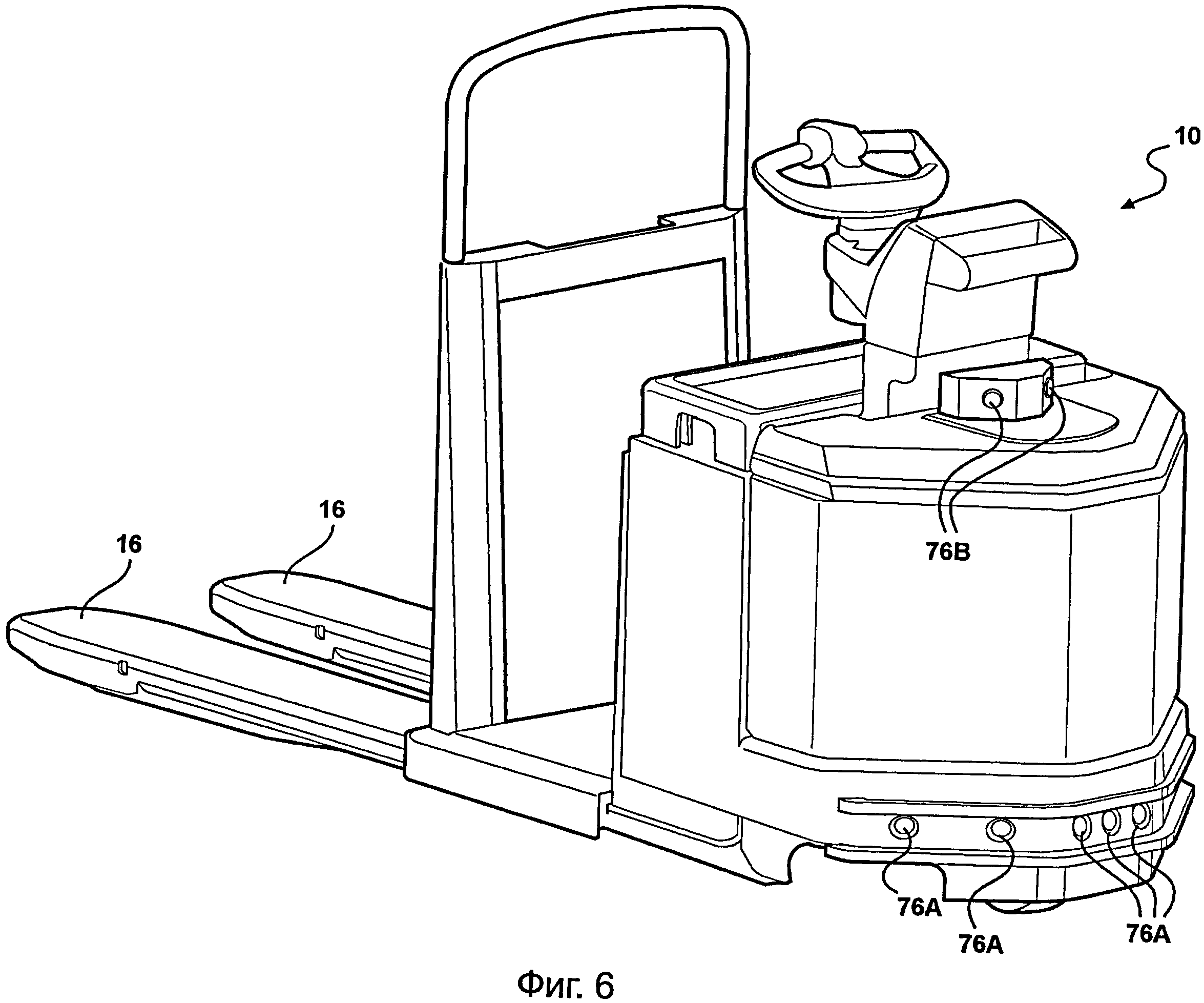
[0018] Фиг.6 представляет собой изображение подъемно-транспортной машины, имеющей расположенные на расстоянии детекторы препятствий в соответствии с различными особенностями настоящего изобретения;
[0019] Фиг.7 представляет собой изображение подъемно-транспортной машины, имеющей детекторы препятствий в соответствии со различными особенностями настоящего изобретения;
[0020] Фиг.8 представляет собой изображение подъемно-транспортной машины, имеющей детекторы препятствий в соответствии со следующими особенностями настоящего изобретения;
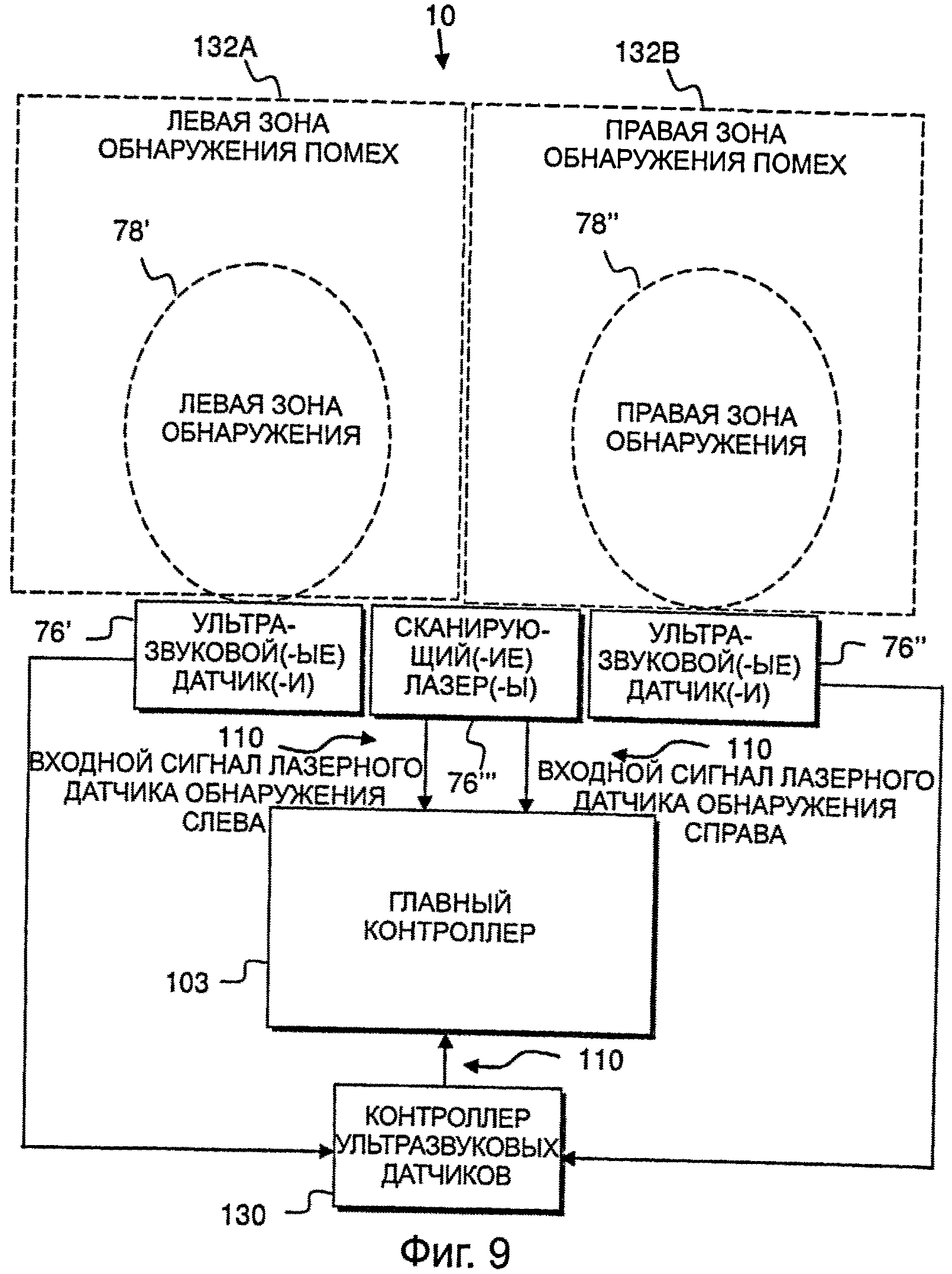
[0021] Фиг.9 представляет собой блок-схему системы управления подъемно-транспортной машины, которая соединена с датчиками для обнаружения объектов на пути следования машины в соответствии с различными особенностями настоящего изобретения;
[0022] Фиг.10 представляет собой блок-схему способа осуществления управления коррекцией в соответствии с различными особенностями настоящего изобретения;
[0023] Фиг.11 представляет собой схематическое изображение подъемно-транспортной машины, движущейся по узкому проходу на складе, управляемой дистанционно при помощи беспроводных средств и автоматически выполняющей маневр корректировки направления движения в соответствии с различными особенностями настоящего изобретения.
[0024] Фиг.12 представляет собой график, на котором показан пример скорости подъемно-транспортной машины, выполняющей маневр корректировки направления движения и управляемой дистанционно при помощи беспроводных средств, в соответствии с различными особенностями настоящего изобретения;
[0025] Фиг.13 представляет собой график, на котором показан пример передаваемых контроллеру входных данных о зоне обнаружения помех, которые показывают, где обнаружен объект - в левой или правой зоне обнаружения помех, в соответствии с различными особенностями настоящего изобретения.
[0026] Фиг.14 представляет собой график, на котором показан пример корректировки направления движения в градусах в качестве иллюстрации и пример маневра корректировки направления движения подъемно-транспортной машины с дистанционным беспроводным управлением в соответствии с различными особенностями настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0027] В приведенном далее подробном описании показанных примеров осуществления изобретения приводятся ссылки на приложенные чертежи, которые являются частью настоящего описания и на которых в качестве иллюстрации, а не для ограничения, изображены конкретные примеры осуществления изобретения. Подразумевается, что могут быть использованы и другие примеры осуществления и что могут быть внесены изменения без отступления от сущности и объема различных примеров осуществления настоящего изобретения. В частности, при отсутствии указаний на иное, если характеристики описаны со ссылкой на какую-либо конкретную фигуру, не следует считать, что они ограничены только этим конкретным примером осуществления; они могут быть включены в характеристики, описанные в связи с другим конкретным примером осуществления, который будет очевиден для специалиста в данной области техники, или же могут использоваться вместо этих характеристик.
Низкоуровневый комплектовщик заказов:
[0028] Как показано на чертежах, и в частности, на фиг.1, подъемно-транспортная машина, изображенная в виде низкоуровневого комплектовщика заказов 10, в общем включает в себя приспособление для подъема груза 12, которое выходит из силового агрегата 14. Приспособление для подъема груза 12 включает в себя пару вил 16, при этом каждый клык вил 16 имеет приспособление для поддержки груза с колесами 18. Приспособление для подъема груза 12 может обладать и другими характеристиками для подъема и транспортировки грузов в дополнение к изображенной компоновке вил 16 или вместо нее, как например, подпорку, подъемные вилы с механизмом типа ножниц, выносные опоры или отдельные регулируемые по высоте вилы. Кроме того, устройство для подъема груза 12 может включать в себя такие средства для подъема и транспортировки груза, как мачта, погрузочная платформа, загрузочная клеть или иная вспомогательная конструкция, которая переносится вилами 16 или иным образом используется для транспортировки груза, перевозимого комплектовщиком 10.
[0029] Изображенный на чертеже силовой агрегат 14 содержит открытую кабину оператора, отделяющую первую концевую секцию силового агрегата 14 (напротив вил 16) от второй концевой секции (ближе к вилам 16). Открытая кабина оператора имеет платформу, на которой оператор может стоять и управлять комплектовщиком 10, и/или место, откуда оператор может управлять различными функциями комплектовщика 10.
[0030] Для обнаружения присутствия оператора на комплектовщике 10 могут использоваться датчики присутствия 58. Например, датчики присутствия 58 могут быть расположены на полу платформы, над полом платформы или под полом платформы, или же в ином месте кабины оператора. На примере комплектовщика, изображенном на фиг.1, датчики присутствия 58 показаны пунктирными линиями, указывающими, что они расположены под полом платформы. При такой конфигурации датчики присутствия 58 могут содержать датчики нагрузки, реле и проч. В качестве альтернативы датчики присутствия 58 могут быть установлены над полом платформы с использованием технологии обнаружения при помощи ультразвуковых, емкостных или иных подходящих датчиков. Использование датчиков присутствия 58 будет более подробно описано далее.
[0031] Силовой агрегат 14 имеет вертикальную антенну 66, которая используется для получения управляющих сигналов от соответствующего беспроводного устройства дистанционного управления 70. Устройство дистанционного управления 70 может содержать передатчик, который оператор может носить на себе или который иным образом находится у оператора. Устройство дистанционного управления 70 используется оператором вручную, например, посредством нажатия на кнопку или иной орган управления, чтобы заставить устройство дистанционного управления 70 по беспроводному каналу связи передать по меньшей мере сигнал первого типа, означающий запрос на движение комплектовщику 10. Запрос на движение представляет собой команду, которая указывает соответствующему комплектовщику 10 проехать заданное расстояние, как будет более подробно описано далее.
[0032] Комплектовщик 10 также содержит один или более датчиков препятствий 76, которые находятся на комплектовщике 10, например, на первой концевой секции силового агрегата 14 и/или по бокам силового агрегата 14. Датчики препятствий 76 включают в себя по меньшей мере один бесконтактный датчик препятствий на комплектовщике 10 и используются для задания по меньшей мере одной зоны обнаружения. Например, по меньшей мере одна зона обнаружения может определять зону, которая по меньшей мере частично находится впереди по направлению движения комплектовщика 10 вперед, когда комплектовщик 10 перемещается в ответ на полученный радиосигнал с запросом на движение от устройства дистанционного управления 70, что также будет более подробно описано далее.
[0033] В датчиках препятствий 76 может применяться любая подходящая технология определения приближения, как например, ультразвуковые датчики, устройства оптического распознавания, инфракрасные датчики, лазерные датчики и проч., которые способны обнаружить наличие объектов/препятствий или которые способны формировать сигналы, которые могут анализироваться для определения присутствия объектов/препятствий в заданной(-ых) зоне(-ах) обнаружения силового агрегата 14.
[0034] На практике комплектовщик 10 может быть реализован в других форматах, моделях и характеристиках, таких как тележка для паллет с платформой оператора в задней секции, которая имеет рулевую сошку, соединенную с рулевым рычагом для управления тележкой. Аналогичным образом, несмотря на то, что устройство дистанционного управления 70 показано как похожая на перчатку конструкция 70, возможны различные варианты реализации устройства дистанционного управления 70, включая, например, надеваемое на палец, закрепляемое на ремень или на пояс и т.д. Кроме того, комплектовщик, система дистанционного управления и/или ее элементы, в том числе устройство дистанционного управления 70, могут содержать любые дополнительные и/или альтернативные признаки или характеристики, примеры которых представлены в предварительной заявке на патент США серийный №60/825,688, подана 14 сентября 2006, под названием "СИСТЕМЫ И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ подъемно-транспортной МАШИНОЙ"; заявке на патент США серийный №11/855,310, подана 14 сентября 2007, под названием "СИСТЕМЫ И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ подъемно-транспортной МАШИНОЙ"; заявке на патент США серийный №11/855,324, подана 14 сентября 2007, под названием "СИСТЕМЫ И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ подъемно-транспортной МАШИНОЙ"; предварительной заявке на патент США серийный №61/222,632, подана 2 июля 2009, под названием "УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ подъемно-транспортной МАШИНОЙ"; заявке на патент США серийный №12/631,007, подана 4 декабря 2009, под названием "СКАНИРОВАНИЕ ДАТЧИКАМИ НЕСКОЛЬКИХ ЗОН ДЛЯ подъемно-транспортных МАШИН"; предварительной заявке на патент США серийный №61/119,952, подана 4 декабря 2008, под названием "СКАНИРОВАНИЕ ДАТЧИКАМИ НЕСКОЛЬКИХ ЗОН ДЛЯ ДИСТАНЦИОННО УПРАВЛЯЕМЫХ подъемно-транспортных МАШИН"; и/или патенте США №7,017,689, выдан 28 марта 2006, под названием "ЭЛЕКТРИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ ДЛЯ подъемно-транспортной МАШИНЫ"; описания каждой из которых полностью включены в настоящее описание посредством ссылки.
Система управления для дистанционного управления низкоуровневым комплектовщиком заказов;
[0035] Изображенная на фиг.2 блок-схема показывает систему управления для интеграции команд дистанционного управления с комплектовщиком 10. Антенна 66 соединена с приемником 102 для получения команд от устройства дистанционного управления 70. Приемник 102 передает полученные управляющие сигналы контроллеру 103, который обеспечивает соответствующую реакцию на полученные команды и, таким образом, может далее именоваться главным контроллером. При этом контроллер 103 выполнен в виде аппаратного устройства и также может выполнять программное обеспечение (включая микропрограммы, резидентное программное обеспечение, микрокод и проч.). Кроме того, особенности настоящего изобретения могут принимать форму компьютерного программного продукта на одном или более машиночитаемых носителях информации, на котором находится машиночитаемый программный код. Например, комплектовщик 10 может включать в себя память, где хранится компьютерный программный продукт, который при выполнении процессором контроллера 103 осуществляет корректировку направления движения, как более подробно описано далее.
[0036] Таким образом, контроллер 103 может представлять собой, по меньшей мере частично, систему обработки данных, пригодную для хранения и/или выполнения программного кода, и может включать в себя по меньшей мере один процессор, соединенный с элементами памяти напрямую или опосредованно, например, через системную шину или иное подходящее соединение. Элементы памяти могут включать в себя локальную память, используемую непосредственно во время выполнения программного кода, память, интегрированную в микроконтроллер, или специализированную интегральную микросхему (ASIC), программируемую логическую матрицу или другое устройство обработки с изменяемой конфигурацией и т.д.
[0037] Ответ контроллера 103 на полученные по беспроводной связи команды, например, через беспроводной передатчик 70, соответствующую антенну 66 и приемник 102, может включать в себя одно или более действий, либо бездействие, в зависимости от реализуемой логики. Действия могут включать в себя управление элементами комплектовщика 10, их корректировку или иное воздействие на них. Контроллер 103 также может получать информацию от других устройств ввода 104, например, от таких источников, как датчики присутствия 58, датчики препятствий 76, реле, датчики нагрузки, кодировщики и прочие устройства/функции, имеющиеся у комплектовщика 10, для определения соответствующего действия в ответ на полученные команды от устройства дистанционного управления 70. Датчики 58, 76 и проч. могут быть соединены с контроллером 103 через вводы 104 или через подходящую сеть комплектовщика, например, через шину CAN 110.
[0038] В приведенной в качестве примера конфигурации устройство дистанционного управления 70 предназначено для беспроводной передачи управляющего сигнала, который представляет собой сигнал первого типа, такой как команда движения, приемнику 102 на комплектовщике 10. В настоящем документе команда движения также называется "сигнал движения", "запрос на движение" или "сигнал поездки". Запрос на движение используется для отправки комплектовщику 10 запроса, чтобы он проехал заданное расстояние, например, чтобы комплектовщик 10 проехал или переместился в одном направлении на заданное расстояние. Первое направление может быть задано, например, посредством перемещения комплектовщика 10 из направления силового агрегата 14, т.е. приспособления для подъема груза 12 (например, вилы 16), в обратном направлении. Можно также задать и другие направления движения и; таким образом, детекторы препятствий могут быть расположены на машине соответственно. Кроме того, комплектовщиком 10 можно управлять, чтобы он перемещался, в общем, в прямом направлении или вдоль заданного направления. Соответственно, ограниченное расстояние движения может быть указано в виде примерного расстояния движения, времени движения или иной единицы измерения.
[0039] Таким образом, сигнал первого типа, полученный приемником 102, передается контроллеру 103. Если контроллер 103 определяет, что сигнал движения является надлежащим сигналом движения и что комплектовщик в данный момент находится в соответствующем состоянии (более подробно объясняется ниже), контроллер 103 посылает сигнал и задает соответствующую конфигурацию конкретному комплектовщику 10, чтобы комплектовщик 10 сперва проехал некоторое расстояние и затем остановился. Остановка комплектовщика 10 может быть реализована за счет того, чтобы позволить двигаться комплектовщику 10 накатом до полной остановки или за счет использования тормоза для остановки комплектовщика 10.
[0040] В качестве примера, контроллер 103 может быть подключен (с возможностью обмена данными) к системе контроля тяги, которая показана как контроллер тягового двигателя 106 комплектовщика 10. Контроллер тягового двигателя 106 соединен с тяговым двигателем 107, который приводит в движение по меньшей мере одно управляемое колесо 108 комплектовщика 10. Контроллер 103 может взаимодействовать с контроллером тягового двигателя 106 для увеличения, снижения, корректировки и/или иного ограничения скорости комплектовщика 10 при получении запроса на движение от устройства дистанционного управления 70. Контроллер 103 также может быть подключен (с возможностью обмена данными) к контроллеру рулевого колеса 112, который соединен с двигателем рулевого колеса 114, который управляет по меньшей мере одним управляемым колесом 108 комплектовщика 10. При этом контроллер 103 может управлять комплектовщиком 10, чтобы комплектовщик проделал необходимый путь или держал необходимый курс при получении сигнала движения от устройства дистанционного управления 70.
[0041] Еще в одном наглядном примере контроллер 103 может быть подключен с возможностью обмена данными к контроллеру тормозов 116, который управляет тормозами 117 комплектовщика для снижения скорости, остановки или иного контроля скорости комплектовщика 10 при получении запроса на движение от устройства дистанционного управления 70. Кроме того, контроллер 103 может быть подключен с возможностью обмена данными к иным устройствам машины, например, к главным контакторам 118 и/или к иным средствам вывода 119, связанным с комплектовщиком 10, при необходимости для выполнения необходимых действий для реализации функции удаленного управления движением.
[0042] В соответствии с различными особенностями настоящего изобретения контроллер 103 может обмениваться данными с приемником 102 и с контроллером тягового двигателя 106 для дистанционного управления комплектовщиком 10 в ответ на получение команд движения от соответствующего устройства дистанционного управления 70. Кроме того, контроллер 103 может быть сконфигурирован для выполнения первого действия, если комплектовщик 10 находится в движении, например при дистанционном управлении в ответ на запрос на движение, и при этом обнаружено препятствие в одной из зон обнаружения. Контроллер 103 также может быть сконфигурирован для выполнения другого действия, отличного от первого действия, когда комплектовщик 10 находится в движении (например, при дистанционном управлении в ответ на запрос на движение) и при этом обнаружено препятствие в другой зоне обнаружения. Для этого при получении сигнала движения контроллером 103 от устройства дистанционного управления 70, контроллер 103 может учитывать любое количество факторов, чтобы определить, надо ли выполнять сигнал движения для начала или продолжения движения комплектовщика 10.
[0043] Соответственно, если комплектовщик 10 движется в ответ на команду, полученную беспроводным блоком дистанционного управления, контроллер 103 может динамически изменять, контролировать, корректировать или иным образом влиять на работу при дистанционном управлении, например, остановить комплектовщик 10, изменить угол движения комплектовщика 10 или выполнить иные действия. Таким образом, на реакцию контроллера 103 на запросы на движение от устройства дистанционного управления 70 могут влиять какие-либо конкретные характеристики машины, состояние одного или более параметров машины, среда, в которой находится машина и т.д.
[0044] Контроллер 103 может отклонить полученный сигнал движения в зависимости от заданного(-ых) условия(-ий), например, относительно фактора(-ов) окружающей среды или рабочего(-их) параметра(-ов). Например, контроллер 103 может проигнорировать запрос на движение, который в иных обстоятельствах был бы действителен, на основании информации, полученной от одного или более датчиков 58, 76. Например, в соответствии с различными особенностями настоящего изобретения контроллер 103 по желанию может учитывать такие факторы, как присутствие оператора на комплектовщике 10, при определении того, следует ли реагировать на команду движения от устройства дистанционного управления 70. Как указано выше, комплектовщик 10 может содержать по меньшей мере один датчик присутствия 58 для обнаружения присутствия оператора на комплектовщике 10. При этом контроллер 103 может быть дополнительно сконфигурирован таким образом, чтобы реагировать на запрос на движение для дистанционного управления комплектовщиком 10 тогда, когда датчик(и) присутствия 58 показывает(-ют) отсутствие оператора на комплектовщике 10. Таким образом, при данном примере осуществления комплектовщиком 10 можно управлять дистанционно при помощи команд от передатчика только тогда, когда оператора на комплектовщике 10 физически нет. Аналогичным образом, при обнаружении датчиками препятствий 76 объекта, в том числе оператора, рядом и/или в непосредственной близости с комплектовщиком 10, контроллер 103 может отклонить запрос на движение от передатчика 70. Таким образом, в данном примере реализации оператор должен находиться на ограниченном расстоянии от комплектовщика 10, например, достаточно близко к комплектовщику 10, чтобы находиться в зоне действия беспроводной связи (что может ограничивать максимальное расстояние оператора от комплектовщика 10). В качестве альтернативы могут быть реализованы и другие конфигурации.
[0045] Контроллер 103 для интерпретации полученных от передатчика сигналов и реагирования на них также/в качестве альтернативы может учитывать любое другое разумное количество условий, факторов, параметров и проч. Примеры прочих факторов более подробно описаны в заявке на временный патент США серийный №60/825,688 под названием "СИСТЕМЫ И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ подъемно-транспортной МАШИНОЙ"; заявке на патент США серийный №11/855,310 под названием "СИСТЕМЫ И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ подъемно-транспортной МАШИНОЙ"; заявке на патент США серийный №11/855,324 под названием "СИСТЕМЫ И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ подъемно-транспортной МАШИНОЙ"; заявке на временный патент США серийный №61/222,632 под названием "УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ подъемно-транспортной МАШИНОЙ"; заявке на патент США серийный №12/631,007 под названием "СКАНИРОВАНИЕ ДАТЧИКАМИ НЕСКОЛЬКИХ ЗОН ДЛЯ подъемно-транспортных МАШИН" и заявке на временный патент США серийный №61/119,952 под названием "СКАНИРОВАНИЕ ДАТЧИКАМИ НЕСКОЛЬКИХ ЗОН ДЛЯ ДИСТАНЦИОННО УПРАВЛЯЕМЫХ подъемно-транспортных МАШИН, описания из которых полностью включены в настоящий документ посредством ссылки.
[0046] После подтверждения запроса на движение контроллер 103 взаимодействует с контроллером тягового двигателя 106, например, напрямую или опосредованно, например, через шину CAN 110 (если таковая используется), чтобы заставить комплектовщик 10 перемещаться на ограниченное расстояние. В зависимости от конкретной реализации контроллер 103 может взаимодействовать с контроллером тягового двигателя 106 и - при желании - с контроллером рулевого колеса 112, чтобы заставить комплектовщик 10 переместиться на заданное расстояние. В качестве альтернативы контроллер 103 может взаимодействовать с контроллером тягового двигателя 106 и - при желании - с контроллером рулевого колеса 112, чтобы заставить комплектовщик 10 двигаться в течение какого-то промежутка времени в ответ на обнаружение активации и удержание в активированном положении органа управления движением на устройстве дистанционного управления 70. Еще в одном примере комплектовщик 10 может быть сконфигурирован таким образом, чтобы двигаться до тех пор, пока поступает сигнал движения. Кроме того, контроллер 103 может быть сконфигурирован на "тайм-аут" и остановку движения комплектовщика 10 при наступлении заданного события, как например, превышение заданного периода времени или расстояния движения, даже если будет определено, что соответствующий орган управления на устройстве дистанционного управления 70 находится в активированном положении.
[0047] Устройство дистанционного управления 70 также может использоваться для передачи сигнала второго типа, такого как "сигнал остановки", означающий, что комплектовщик 10 должен затормозить или иным образом остановиться. Сигнал второго типа также может подразумеваться, например, после выполнения команды "движения", например, после того, как комплектовщик 10 проехал заданное расстояние, двигался в течение заданного времени и проч., при дистанционном управлении в ответ на команду движения. Если контроллер 103 определит, что полученный по беспроводной связи сигнал является сигналом остановки, контроллер 103 посылает сигнал контроллеру тягового двигателя 106, контроллеру тормозов 116 и/или другому элементу комплектовщика, чтобы остановить комплектовщик 10. В качестве альтернативы сигналу остановки, сигнал второго типа может представлять собой "сигнал движения накатом" или "сигнал контролируемого снижения скорости", означающий, что комплектовщик 10 должен двигаться накатом и постепенно остановиться.
[0048] Время, необходимое для полной остановки комплектовщика 10, может изменяться, например, в зависимости от предполагаемого применения, условий окружающей среды, возможностей конкретного комплектовщика 10, груза комплектовщика 10 и иных аналогичных факторов. Например, после перемещения толчками может потребоваться позволить комплектовщику 10 проехать "накатом" некоторое расстояние до полной остановки, чтобы комплектовщик 10 останавливался медленно. Этого можно достичь за счет использования регенеративного торможения для замедления комплектовщика 10 до полной остановки. В качестве альтернативы, после заданной задержки по времени может включаться тормоз, чтобы позволить комплектовщику 10 проехать еще некоторое расстояние после начала операции остановки. Также может потребоваться остановить комплектовщик 10 относительно быстрее, например, при обнаружении объекта на пути следования комплектовщика 10, или если необходима немедленная остановка после перемещения толчками. Например, контроллер может приложить заданный вращающий момент для торможения. В этих условиях контроллер 103 может указать контроллеру 116 использовать тормоза 117 для остановки комплектовщика 10.
Зоны обнаружения подъемно-транспортной машины:
[0049] Как показано на фиг.3, в соответствии с различными особенностями настоящего изобретения один или более датчиков препятствий 76 сконфигурированы таким образом, чтобы все вместе они позволяли обнаруживать объекты/препятствия в нескольких "зонах обнаружения". В этом отношении контроллер 103 может быть сконфигурирован таким образом, чтобы изменять один или более рабочих параметров комплектовщика 10 при обнаружении препятствия в одной или более зонах обнаружения, как более подробно описано ниже. Управление комплектовщиком 10 с использованием зон обнаружения может быть реализовано, когда оператор едет на комплектовщике 10/ведет комплектовщик 10. Одна или более зон обнаружения также могут быть деактивированы или иным образом могут игнорироваться контроллером 103, когда оператор едет на комплектовщике 10/ведет комплектовщик 10, например, чтобы позволить оператору провести комплектовщик 10 через узкий участок. Функции могут быть отключены оператором или автоматически в зависимости от присутствия оператора. Управление комплектовщиком 10 с использованием зон обнаружения также может быть интегрировано с дополнительным дистанционным управлением, как изложено и более подробно описано в настоящем документе.
[0050] Несмотря на то, что для большей ясности представленного здесь описания показано шесть датчиков препятствий 76, может использоваться любое количество датчиков препятствий 76, например, 1 или более - 2, 3, 4, 5, 6, 7 или более. Скорее всего, количество датчиков препятствий 76 будет зависеть от используемой в датчике технологии, размера и/или диапазона зон обнаружения, количества зон обнаружения и/или прочих факторов.
[0051] В наглядном примере первая зона обнаружения 78А находится непосредственно рядом с силовым агрегатом 14 комплектовщика 10. Вторая зона обнаружения 78В определена как смежная с первой зоной обнаружения 78А и в общем описывает первую зону обнаружения 78А. Третья зона концептуально определена как вся зона за пределами первой и второй зон обнаружения 78А, 78В. Несмотря на то, что показано, что вторая зона обнаружения 78В в общем охватывает первую зону обнаружения 78А, может быть реализована любая другая практичная конфигурация первой и второй зон обнаружения 78А, 78В. Например, вся область или определенные части зон 78А, 78В могут пересекаться, накладываться или быть взаимоисключающими. Более того, конкретная форма зон обнаружения 78А, 78В может изменяться. Кроме того, может быть задано любое количество зон обнаружения, дальнейшие примеры чего более детально приведены в настоящем документе.
[0052] Кроме того, зоны обнаружения не обязательно должны окружать комплектовщик 10 полностью. Скорее, форма зон обнаружения может зависеть от конкретной реализации, как более подробно описано в настоящем документе. Например, если зоны обнаружения 78А, 78В будут использоваться для контроля скорости движения комплектовщика 10 без оператора на борту во время дистанционного управления с первой ориентацией силового агрегата (вилами назад), зоны обнаружения 78А, 78В могут быть ориентированы по меньшей мере вперед по направлению движения комплектовщика 10. Однако зоны обнаружения также могут охватывать и другие области, например, по сторонам комплектовщика 10.
[0053] В соответствии с различными особенностями настоящего изобретения первая зона обнаружения 78А может означать "зону остановки". Соответственно, вторая зона обнаружения 78В может означать "первую зону скорости". При такой конфигурации, если объект, например какое-либо препятствие, обнаружен в первой зоне обнаружения 78А и подъемно-транспортная машина 10 движется, например, управляемая дистанционно в ответ на запрос на движение, контроллер 103 может быть сконфигурирован таким образом, чтобы выполнить действие, например "остановка", для остановки комплектовщика 10. При этом движение комплектовщика 10 может продолжиться после устранения препятствия, или же для возобновления движения комплектовщика 10 может потребоваться еще один запрос на движение от устройства дистанционного управления 70.
[0054] Если от устройства дистанционного управления 70 получен запрос на движение тогда, когда комплектовщик не движется, и в первой зоне обнаружения 78А обнаружен объект, контроллер 103 может отклонить запрос на движение и оставить комплектовщик в неподвижном состоянии до тех пор, пока препятствие не будет убрано из зоны остановки.
[0055] Если объект/препятствие обнаружено во второй зоне обнаружения 78 В и комплектовщик 10 находится в движении, например, управляемый дистанционно в ответ на запрос на движение, контроллер 103 может быть сконфигурирован на выполнение другого действия. Например, контроллер 103 может выполнить первое снижение скорости комплектовщика 10 до первой заданной скорости, если скорость движения комплектовщика 10 превышает первую заданную скорость.
[0056] Таким образом, предположим, что комплектовщик 10 в ответ на получение запроса на движение от устройства дистанционного управления движется со скоростью V2, которая определяется рядом рабочих условий, если датчики препятствий 76 не обнаруживают препятствие в какой-либо зоне обнаружения. Если комплектовщик изначально находится без движения, комплектовщик может разогнаться до скорости V2. При обнаружении препятствия во второй зоне обнаружения 78 В (но не в первой зоне обнаружения 78А) у комплектовщика 10, например, при помощи контроллера 103, может быть изменен по меньшей мере один рабочий параметр, например, скорость комплектовщика 10 может быть снижена до первой заданной скорости V1, которая ниже скорости V2. То есть, V1 [0057] Для наглядного примера предположим, что комплектовщик 10 сконфигурирован таким образом, чтобы двигаться на скорости примерно 2,5 мили в час (миль/ч) (4 километра в час (км/ч)) на ограниченное, заданное расстояние, если комплектовщик 10 движется без оператора на борту и управляется дистанционно при помощи беспроводной связи в ответ на запрос на движение от соответствующего устройства дистанционного управления 70, пока в заданной зоне обнаружения не будет обнаружен объект. При обнаружении препятствия во второй зоне обнаружения 78 В контроллер 103 может скорректировать скорость комплектовщика 10 примерно до 1,5 м/ч (2,4 км/ч) или до другой скорости, меньшей 2,5 миль в час (миль/ч) (4 километра в час (км/ч)). При обнаружении препятствия в первой зоне обнаружения 78А контроллер 103 останавливает комплектовщик 10. [0058] В примере выше используется допущение, что комплектовщик 10 движется, управляемый дистанционно при помощи беспроводной связи, в ответ на действительный сигнал, полученный от передатчика 70. При этом датчики препятствий 76 могут использоваться для регулировки рабочих параметров комплектовщика 10 без оператора на борту. Однако датчики препятствий 76 и соответствующая логика контроллера могут быть задействованы также и тогда, когда комплектовщик 10 управляется оператором, который находится, например, на платформе или в иной подходящей части комплектовщика 10. Таким образом, в соответствии с различными особенностями настоящего изобретения, при обнаружении объекта в зоне остановки 78А контроллер 103 может остановить комплектовщик 10 или запретить комплектовщику 10 начать движение независимо от того, управляется ли комплектовщик оператором или автоматически в ответ на получение соответствующего запроса на движение, переданного по беспроводной связи. Соответственно, в зависимости от конкретной реализации функция контроля/ограничения скорости контроллера 103, например, в ответ на обнаружение объекта во второй зоне обнаружения 78В, но не в первой зоне обнаружения 78А, может быть реализована независимо от того, движется ли комплектовщик 10 в ответ на получение соответствующего запроса на движения, переданного по беспроводной связи, или находится ли на комплектовщике 10 оператор во время управления им. [0059] Однако в соответствии с различными особенностями настоящего изобретения и как вкратце было отмечено выше, могут возникнуть ситуации, когда будет необходимо отключить одну или более из зон обнаружения, когда комплектовщиком 10 управляет оператор. Например, когда комплектовщиком 10 управляет оператор, может оказаться необходимым обойти/отключить датчики препятствий 76/логику контроллера, независимо от внешних условий. В качестве дальнейшего примера, когда комплектовщиком 10 управляет оператор, может оказаться необходимым обойти/отключить датчики препятствий 76/логику контроллера, чтобы позволить оператору провести комплектовщик 10 через небольшое помещение, например, через узкий участок, вокруг углов и проч., что в противном случае могло бы привести к активации одной или более зон обнаружения. По существу, активация логики контроллера, например, контроллера 103, для использования обнаружения объектов в зонах обнаружения, чтобы помочь управлять комплектовщиком 10 во время нахождения на борту комплектовщика 10 оператора, в соответствии с различными особенностями настоящего изобретения может контролироваться вручную, программироваться или иным образом контролироваться избирательно. [0060] Как изображено на фиг.4, в соответствии с другими особенностями настоящего изобретения один или более датчиков препятствий 76 могут быть созданы на основе ультразвуковой технологии или другой подходящей бесконтактной технологии, позволяющей измерять расстояние и/или определять местоположение. Таким образом, может быть измерено расстояние до объекта и/или может быть выполнено вычисление, чтобы определить, находится ли обнаруженный объект в зоне обнаружения 78А, 78В, например, исходя из расстояния от объекта до комплектовщика 10. В качестве примера, датчик препятствия 76 может быть реализован в виде ультразвукового датчика или преобразователя, посылающего "сигнал-импульс", например, высокочастотный сигнал, формируемый пьезоэлектрическим элементом. Затем ультразвуковой датчик 76 не излучает сигнал, а принимает ответ. При этом время "полета" информации может быть определено и использовано для определения каждой зоны. Таким образом, контроллер, например, контроллер 103 или специальный контроллер, связанный с датчиками препятствий 76, может использовать программное обеспечение, которое на основании времени полета информации определяет, находится ли объект в зоне обнаружения. [0061] В соответствии с другими особенностями настоящего изобретения несколько датчиков препятствий 76 могут работать вместе для обнаружения объекта. Например, первый ультразвуковой датчик может посылать сигнал-импульс. Затем первый ультразвуковой датчик либо один или более дополнительных ультразвуковых датчиков могут регистрировать ответ. Таким образом, контроллер 103 может использовать разнообразие при определении наличия объекта в одной или более зонах обнаружения. [0062] На фиг.5 изображено управление с использованием нескольких зон скорости в соответствии с.другими особенностями настоящего изобретения. Предполагается, что эти примеры предоставлены для иллюстрации, и не следует считать, что их использование ограничено исключительно беспроводным управлением машиной. Как показано, имеется три зоны обнаружения. Если объект, такой как препятствие, обнаружен в первой зоне обнаружения 78А и комплектовщик 10 движется в ответ на получение соответствующего запроса на движение, переданного по беспроводной связи передатчиком 70, может быть выполнено первое действие, например, комплектовщик 10 может быть остановлен, как более подробно описано в этом документе. Если объект, такой как препятствие, обнаружен во второй зоне обнаружения 78В и комплектовщик 10 движется в ответ на получение соответствующего запроса на движение, переданного по беспроводной связи передатчиком 70, может быть выполнено второе действие, например, скорость машины может быть ограничена, уменьшена и т.д. Таким образом, вторая зона обнаружения 78В далее может обозначать зону первой скорости. Например, скорость комплектовщика 10 может быть снижена и/или ограничена до первой относительно медленной скорости, например, примерно до 1,5 миль/ч (2,4 км/ч). [0063] Если объект, такой как препятствие, обнаружен в третьей зоне обнаружения 78С и комплектовщик 10 движется в ответ на получение соответствующего запроса на движение, переданного по беспроводной связи передатчиком 70, может быть выполнено третье действие, например, скорость комплектовщика 10 может быть снижена или иным образом ограничена до второй скорости, например, примерно до 2,5 миль/ч (4 км/ч). Таким образом, третья зона обнаружения далее может означать зону второй скорости. Ели в первой, во второй и в третьей зонах обнаружения 78А, 78В и 78С препятствий не обнаружено, комплектовщику 10 можно дистанционно отдать команду проехать ограниченное расстояние, например, на скорости, которая выше скорости при обнаружении препятствия в третьей зоне обнаружения, например, на скорости примерно 4 миль/ч (6,2 км/ч). [0064] Как далее показано на фиг.5, зоны обнаружения могут быть заданы различной формой по отношению к комплектовщику 10. Кроме того, на фиг.5 используется седьмой датчик препятствия 76, однако может использоваться любое количество датчиков в зависимости от применяемой технологии и/или реализуемых характеристик. В качестве примера, а не ограничения, седьмой датчик препятствий 76 может располагаться примерно по центру, например, на бампере или в ином подходящем месте на приведенном в примере комплектовщике 10. На приведенном в примере комплектовщике 10 третья зона 78С может простираться примерно на 6,5 футов (2 метра) вперед от силового агрегата 14 комплектовщика 10. [0065] В соответствии с различными особенностями и примерами осуществления настоящего изобретения, может быть реализовано любое количество зон обнаружения любой формы. Например, в зависимости от необходимых эксплуатационных характеристик комплектовщика, множество небольших зон обнаружения может быть задано различными координатами относительно комплектовщика 10. Аналогичным образом, может быть задано несколько больших зон обнаружения в зависимости от необходимых эксплуатационных характеристик комплектовщика. В качестве примера, в память контроллера может быть записана база данных, уравнение, функция или иные средства сравнения данных, как например, таблица соответствия. Если во время дистанционного управления интересующим рабочим параметром является скорость движения, в таблице может быть соотнесена скорость движения с зонами обнаружения, заданными расстоянием, диапазоном, координатами положения или каким-либо иным значением измерения. Если комплектовщик 10 движется в ответ на получение соответствующего запроса на движение, переданного по беспроводной связи передатчиком 70, и датчики препятствий обнаруживают объект, то расстояние до этого обнаруженного объекта может использоваться в качестве "ключа" для поиска соответствующего значения скорости движения в таблице. Значение скорости движения, найденное в таблице, может быть использовано контроллером 103 для корректировки движения комплектовщика 10, например, для его замедления и т.д. [0066] Площадь каждой зоны обнаружения может быть выбрана, например, в зависимости от таких факторов, как необходимая скорость комплектовщика при движении комплектовщика 10 в ответ на получение действительного запроса на движение от устройства дистанционного управления 70, необходимый тормозной путь, предполагаемый груз, перевозимый комплектовщиком 10, необходимость движения накатом некоторое расстояние для обеспечения устойчивости груза, скорость реакции машины и т.д. Более того, при определении требуемого количества датчиков препятствий 76 могут учитываться такие факторы, как диапазон каждой необходимой зоны обнаружения и т.д. При этом подобная информация может быть статической или динамической, например, основанной на опыте оператора, перевозимом машиной грузе, характере груза, условиях окружающей среды и проч. Также предусмотрено, что контроллер 103 может формировать предупреждающий сигнал или сигнал тревоги при обнаружении объекта или человека в зоне обнаружения. [0067] В качестве наглядного примера, в конфигурации с несколькими зонами обнаружения, например, с тремя зонами обнаружения, для обеспечения необходимого диапазона покрытия может использоваться по меньшей мере три и даже до семи или более датчиков препятствий (например, ультразвуковых датчиков или лазерных датчиков). При этом датчик(и) может(-гут) сканировать область по направлению движения комплектовщика 10 на достаточное расстояние для обеспечения надлежащего ответа, например, снижения скорости. При этом по меньшей мере один датчик может сканировать пространство на несколько метров впереди по направлению движения комплектовщика 10. [0068] В соответствии с различными особенностями настоящего изобретения, наличие нескольких скоростных зон обнаружения обеспечивает относительно более высокую максимальную скорость движения вперед при работе в ответ на передаваемые по беспроводной связи команды движения. Такая конфигурация позволяет устранить ненужные преждевременные остановки машины за счет одной или более промежуточных зон, в которых комплектовщик 10 снижает скорость, прежде чем принять решение о полной остановке. [0069] В соответствии с другими особенностями настоящего изобретения, использование нескольких зон обнаружения обеспечивает систему, которая позволяет соответствующему оператору лучше позиционировать комплектовщик 10 во время комплектации заказов. Например, оператор может расположить комплектовщик 10 таким образом, чтобы не выравнивать его по отношению к проходу на складе. В этом примере при перемещении комплектовщика 10 вперед во второй зоне обнаружения 78В может быть обнаружено препятствие, такое как корзина для комплектации или складской стеллаж. При обнаружении стеллажа комплектовщик 10 снизит скорость. Если стеллаж обнаружен в первой зоне обнаружения 78А, комплектовщик 10 остановится, даже если комплектовщик 10 и не проехал все запрограммированное расстояние. Аналогичные ненужные замедления или остановки могут иметь место в загроможденных и/или захламленных проходах. [0070] В соответствии с различными особенностями настоящего изобретения, комплектовщик 10 может задавать параметры скорости и торможения на основании информации, полученной от датчиков препятствий 76. Кроме того, логика, реализуемая комплектовщиком в ответ на зоны обнаружения, может меняться или варьировать в зависимости от необходимого применения. В качестве нескольких наглядных примеров, границы каждой зоны при использовании конфигурации с несколькими зонами могут задаваться программированием (и/или перепрограммированием) контроллера, например, могут быть зашиты в ПЗУ. С учетом заданных зон, с каждой зоной может быть связан один или более рабочих параметров. Установленные рабочие параметры могут определять состояние, например, максимальную разрешенную скорость движения, действие, например, торможение, движение накатом или остановка иным контролируемым образом и т.д. Действие также может представлять собой воздержание от какого-либо действия. Например, действие может включать в себя корректировку угла поворота или траектории движения комплектовщика 10, как более подробно описано в настоящем документе. В некоторых примерах осуществления изобретения действие может представлять собой комбинацию максимальной скорости движения и угла поворота или направления движения. [0071] В соответствии с другими примерами осуществления настоящего изобретения, один или более датчиков препятствий, таких как датчики препятствий 76А, 76В, показанные на фиг.6 и 8, могут использовать для обнаружения объектов в первой, второй и третьей зонах обнаружения впереди комплектовщика 10, когда комплектовщик 10 движется в ответ на запрос на движение, полученный по беспроводной связи от передатчика 70. Контроллер 103 или другое устройство обработки данных с датчиков также может формировать сигнал обнаружения объекта и - по желанию - сигнал расстояния при обнаружении объекта впереди комплектовщика 10. В качестве наглядного примера, еще одним входным сигналом 104 контроллера 103 может быть сигнал массы, сформированный датчиком нагрузки LS (см. фиг.7 и 8), который определяет совокупную массу приспособления для подъема груза 12 (например, вилы 16) и любого груза на этом приспособлении 12 или на вилах 16. Датчик нагрузки LS схематически показан на фиг.7 и 8 возле вил 16, но в качестве альтернативы может быть встроен в гидравлическую систему для подъема вил 16. Вычитая массу вил 16 (известное постоянное значение), например, из общей массы, определенной сигналом массы, контроллер 103 определяет массу груза на вилах. Используя определенную при помощи датчика массу груза и информацию об обнаружении объекта в первой, второй или третьей зоне обнаружения в качестве входных данных для таблицы соответствия или соответствующих уравнений, контроллер 103 может сформировать соответствующий сигнал остановки машины или задания максимально разрешенной скорости. [0072] Значения, определяющие сигналы остановки машины и максимально разрешенной скорости, могут быть определены экспериментальным путем и могут храниться в таблице соответствий, могут рассчитываться в реальном времени по заданной формуле и т.д. В показанном примере осуществления изобретения контроллер 103 определяет массу груза на вилах 16 и факт обнаружения объекта в первой, второй или третьей зоне обнаружения и, используя таблицу соответствия, например, выполняет команду остановки или определяет максимально разрешенную скорость комплектовщика 10 и формирует соответствующий сигнал максимально разрешенной скорости для комплектовщика 10. Он также или в качестве альтернативы может формировать требуемый угол направления движения, чтобы избежать столкновения с обнаруженным объектом. [0073] В качестве примера, если на вилах 16 нет груза и если датчиками препятствия 76А, 76В не обнаружен объект в первой, второй или третьей зоне обнаружения, контроллер 103 позволяет комплектовщику 10 двигаться на любой скорости до максимальной скорости (включительно), например, 4,5 миль/ч. Если в первой, второй или третьей зонах обнаружения объект не обнаружен, максимально разрешенная скорость комплектовщика 10 может быть сконфигурирована на уменьшение по мере увеличения груза, перевозимого комплектовщиком 10. В качестве примера, для груза массой 8000 фунтов (прим. 3630 кг) максимально разрешенная скорость комплектовщика 10 составляет 2,5 миль/ч. Следует отметить, что в некоторых местах максимально разрешенная скорость машины без водителя на борту может быть установлена на заданный верхний предел, например, 3,5 миль/ч. Таким образом, максимально разрешенная скорость машины без оператора на борту может быть установлена, например, контроллером 103, на эту максимально разрешенную скорость. [0074] Если при наличии любого груза на вилах 16 в первой зоне обнаружения обнаружен объект, контроллер 103 формирует "сигнал остановки", который заставляет комплектовщик 10 преимущественно немедленно остановиться. Для любого груза данной массы максимально разрешенная скорость комплектовщика 10 постепенно тем больше, чем дальше объект находится от комплектовщика 10. А также для любого груза данной массы максимально разрешенная скорость комплектовщика 10 будет меньше при обнаружении объекта во второй зоне обнаружения, нежели при обнаружении объекта в третьей зоне обнаружения. Максимально разрешенные скорости машины для второй и третьей зон обнаружения определяются для груза каждой массы таким образом, чтобы скорость комплектовщика 10 могла быть контролируемо уменьшена по мере движения комплектовщика 10 по направлению к объекту, чтобы комплектовщик 10 в конечном итоге мог безопасно остановиться до того, как комплектовщик достигнет точки, в которой находится объект. Эти значения скорости могут быть определены экспериментальным путем, по формулам или с использованием комбинации указанных способов, и могут изменяться в зависимости от типа, размера и возможностей торможения машины. [0075] В качестве наглядного примера допустим, что масса груза на вилах 16 составляет 1500 фунтов (680 кг) и предусмотрено три зоны обнаружения, в т.ч. ближайшая к комплектовщику первая зона обнаружения, за которой следует вторая зона обнаружения, и самая дальняя от комплектовщика третья зона обнаружения. Если обнаруженный объект находится на расстоянии в третьей зоне обнаружения, максимально разрешенная скорость машины может быть установлена на 3 миль/ч. Таким образом, если при обнаружении объекта комплектовщик 10 движется на скорости больше 3,0 миль/ч, контроллер 103 снижает скорость, чтобы скорость машины снизилась до 3,0 миль/ч (или до другого заданного значения). [0076] Если масса перевозимого комплектовщиком 10 груза по-прежнему равняется 1500 фунтам (680 кг) и объект обнаружен на расстоянии от комплектовщика 10 во второй зоне обнаружения, максимально разрешенная скорость машины может составлять, например, 2 миль/ч. Таким образом, если при обнаружении объекта во второй зоне обнаружения комплектовщик 10 двигается на скорости больше 2 миль/ч, контроллер 103 снижает скорость, чтобы скорость машины снизилась, например, до 2 миль/ч. [0077] В соответствии с приведенным выше примером, если масса перевозимого комплектовщиком 10 груза равняется 1500 фунтам (680 кг) и объект обнаружен в первой зоне обнаружения, контроллером 103 может быть сформирован сигнал остановки для остановки комплектовщика 10. [0078] Датчики препятствий могут содержать ультразвуковые преобразователи. Известно, что для ультразвуковых преобразователей характерен феномен "переотражения". По существу, "переотражение" - это когда преобразователь продолжает вибрировать и передавать ультразвуковые сигналы после пропадания управляющего сигнала, используемого для того, чтобы инициировать переданный сигнал. Амплитуда "переотраженного" сигнала затухает довольно быстро, но во время ее затухания до уровня ниже порога определения каждый датчик препятствий может реагировать, игнорируя эти "переотраженные" сигналы, если уровень сигналов превышает контрольный уровень, связанный с этим принимающим датчиком. В результате этого датчик может принять объект за "переотраженный" сигнал и не сможет определить объект в соответствующей зоне обнаружения. Общепринятым способом избежать этой проблемы является глушение всех отраженных сигналов, формируемых датчиками препятствий, в течение заданного промежутка времени после начала передачи. Заданный промежуток времени определяется исходя из различных факторов, в том числе типа используемого преобразователя, но в течение этого заданного промежутка времени действительные отраженные сигналы не регистрируются. Если датчики препятствий расположены возле передней секции 10А комплектовщика 10 (см. датчики препятствий 76А на фиг.7) и если используется метод глушения сигналов, это может привести к образованию "мертвой" или "слепой" зоны DZ непосредственно перед комплектовщиком 10 (или по бокам, в случае необходимости), в частности, в примерах осуществления изобретения, когда датчик препятствий расположен на переднем крае или вблизи переднего края машины. Таким образом, если объект О расположен очень близко к передней секции комплектовщика 10, например, на расстоянии 10 мм или меньше, и датчики препятствий 76А расположены на передней секции комплектовщика 10 (см. фиг.7), объект О может не определяться. [0079] В примере осуществления, показанном на фиг.6 и 8, первый и второй датчики препятствий 76А и 76В, соответственно, находятся на расстоянии друг от друга по продольной оси LA комплектовщика 10, см. фиг.8. Одни датчики препятствий 76А расположены на передней секции 10А комплектовщика 10 и могут обнаруживать объекты, находящиеся, например, в первой, во второй и/или в третьей зонах обнаружения. Для обеспечения обнаружения объектов О, расположенных в слепой зоне DZ, которая может иметься у первых датчиков препятствий 76А, другие датчики препятствий 76 В расположены на комплектовщике 10 на некотором расстоянии позади первых датчиков препятствий 76А, т.е. в направлении от передней секции 10А комплектовщика 10, как показано на фиг.8. При этом другие датчики 76 В используются по меньшей мере для обнаружения объектов в зоне DZ на фиг.7. Корректировка направления движения [0080] Когда комплектовщик 10 движется в ответ на получение соответствующего запроса на движение, переданного по беспроводной связи передатчиком 70, например, когда на борту комплектовщика 10 нет человека, как более подробно описано в настоящем документе, комплектовщику 10 могут встретиться препятствия, не требующие остановки комплектовщика 10. Вместо этого может быть выполнен маневр корректировки направления движения таким образом, чтобы комплектовщик 10 продолжал двигаться вперед на соответствующее ограниченное расстояние без необходимости вмешательства оператора. [0081] В соответствии с особенностями настоящего изобретения корректировка направления движения позволяет комплектовщику 10 автоматически избегать объектов, обнаруженных впереди комплектовщика 10. Функция корректировки движения позволяет, например, комплектовщику 10, который может двигаться в ответ на запрос на движение, полученный по беспроводной связи от передатчика 70, оставаться, в целом, в центре складского прохода при движении комплектовщика 10 по проходу. Например, комплектовщик 10 может иметь некоторый уход угла корректировки движения по причине калибровки управления, полового покрытия или какого-либо количества внешних факторов. Однако в соответствии с различными примерами осуществления настоящего изобретения, комплектовщик 10, движущийся в ответ на получение соответствующего запроса на движение, переданного по беспроводной связи передатчиком 70, может выполнять корректировки направления движения, например, чтобы избежать или иным образом держаться на расстоянии от стен и стеллажей, других комплектовщиков, людей, ящиков и прочих препятствий и т.д., освобождая тем самым оператора от необходимости периодически становиться на комплектовщик 10 и направлять его вручную по центру прохода или в иную необходимую позицию либо направление. [0082] В соответствии с различными особенностями настоящего изобретения, контроллер 103 собирает данные от различных датчиков, например, 76, 76А, 76В, которые формируют картину ландшафта/окружающей среды впереди комплектовщика 10. Контроллер 103 затем использует полученные от датчиков данные для определения необходимости выполнения маневра корректировки направления движения, как более подробно описано в настоящем документе. При этом корректировка направления движения может выполняться в дополнение к другим направленным на избежание препятствий действиям, более подробно описанным в настоящем документе, вместо таких действий или в комбинации с такими действиями. Таким образом, для иллюстрации, а не для ограничения, корректировка направления движения может использоваться в комбинации с несколькими зонами скорости, стоп-зоной обнаружения, зонами с зависимостью скорости от массы и проч. [0083] В качестве дополнительного примера, элементы комплектовщика 10 для обнаружения объектов могут подавать сигнал тревоги и/или останавливать комплектовщик 10, уменьшать или иным образом ограничивать максимальную скорость движения комплектовщика 10 и проч. Кроме того, комплектовщик 10 может подавать первый сигнал тревоги, когда комплектовщик пытается выполнить маневр автоматической корректировки направления движения, и второй сигнал тревоги, когда комплектовщик 10 снижает скорость и/или останавливается при обнаружении объекта в соответствующей зоне обнаружения, если эти функции реализованы в комбинации с корректировкой направления движения. [0084] При этом в настоящем документе "зона обнаружения помех" используется для различения зоны, используемой для корректировки направления движения, от "зоны обнаружения", которая используется для ограничения максимальной скорости, остановки комплектовщика 10 и проч., как более подробно описано в настоящем документе. [0085] В наглядном примере у контроллера 103 имеется два входа зон обнаружения помех для распознавания левой и правой ориентации относительно комплектовщика 10. Однако в зависимости от технологии датчика и способа предоставления данных с датчика может потребоваться один или более входов для контроллера 103. В качестве примера, а не ограничения, комплектовщик 10 может быть оборудован одним или более детекторами 76, 76А, 76В, которые все вместе обеспечивают первую зону обнаружения помех и вторую зону обнаружения помех, которые находятся в непосредственной близости с комплектовщиком 10. Например, первая зона обнаружения помех может располагаться слева и, в общем, по направлению движения вперед комплектовщика 10, елевой стороны комплектовщика 10 и т.д. Аналогичным образом, вторая зона обнаружения помех может располагаться справа и, в общем, по направлению движения вперед комплектовщика 10, с правой стороны комплектовщика 10 и т.д. При этом первая и вторая зоны обнаружения помех комплектовщика 10 могут использоваться для выполнения корректировки направления движения, что может включать в себя угол и направление движения. В данной приведенной в качестве примера конфигурации первая и вторая зоны обнаружения помех могут быть взаимоисключающими, или же части первой и второй зоны обнаружения помех могут пересекаться, в результате чего образуется третья зона обнаружения помех в месте пересечения первой и второй зон обнаружения помех. [0086] Кроме того, первая и вторая зоны обнаружения помех могут пересекаться существенно либо частично или не пересекаться с одной или более зонами обнаружения, используемыми для других действий, таких как контроль скорости, торможение или остановка комплектовщика 10 при обнаружении препятствия и проч. Например, диапазон зон обнаружения помех может быть такой же или другой, нежели диапазон одной или более зон обнаружения, если в дополнение к корректировке направления движения реализована функция контроля скорости или другие функции, как более подробно описано в настоящем документе. [0087] Более того, данные, поступающие с датчиков на контроллер 103, могут быть получены с ряда датчиков одного типа или от комбинации датчиков различных типов, например, ультразвуковых датчиков и/или лазерных датчиков. При этом различные датчики и/или технологии обнаружения, например, сканирование лазером или ультразвук, могут использоваться вместе или в сочетании друг с другом, например, можно использовать один или более датчиков или технологий обнаружения для одной или более зон (обнаружения и/или обнаружения помех) и при этом использовать другие один или более датчиков или технологий обнаружения для одной или более других зон (обнаружения и/или обнаружения помех). В качестве еще одного примера, два или более датчиков или технологий обнаружения могут обеспечивать избыточность, например, в качестве набора данных для обеспечения отказоустойчивости, резервного или проверочного набора данных. [0088] В соответствии с дополнительными особенностями настоящего изобретения, контроллер 103 может быть сконфигурирован для обработки дополнительных данных помимо входных данных двух зон обнаружения препятствий; примеры этого могут включать в себя данные об угле и расстоянии до обнаруженного объекта и проч. Таким образом, описанные здесь технологии не ограничиваются лишь двумя зонами обнаружения помех. [0089] Таким образом, корректировка направления движения в соответствии с различными особенностями настоящего изобретения помогает оператору, удерживая комплектовщик 10 на расстоянии от стен, стеллажей, других машин и прочих препятствий, в частности, когда комплектовщик 10 управляется при помощи устройства дистанционного управления 70. [0090] В соответствии с различными особенностями настоящего изобретения, система управления комплектовщика 10 обеспечивает управление корректировкой направления движения в соответствии с различными особенностями настоящего изобретения. На фиг.9 приведено частичное схематическое изображение системы управления. В показанной системе первый ультразвуковой датчик 76' используется для создания первой зоны обнаружения 78', которая здесь также называется левой зоной обнаружения. Соответственно, второй ультразвуковой датчик 76" используется для создания второй зоны обнаружения 78", которая здесь также называется правой зоной обнаружения. Кроме того, несмотря на то, что показано только две ультразвуковых зоны обнаружения, следует понимать, что может быть реализовано любое количество зон обнаружения. А также, как более подробно описано в настоящем документе, реализованные зоны обнаружения могут пересекаться или задавать отдельные, взаимоисключающие зоны. [0091] Выход каждого ультразвукового датчика 76', 76" соединен с контроллером ультразвуковых датчиков 130, который используется - если того требует конкретная технология на основе ультразвука - для обработки выходных данных от ультразвуковых датчиков 76', 76". Выход контроллера ультразвуковых датчиков 130 соединен, например, в качестве входа с контроллером 103. Контроллер 103 может обрабатывать выходные сигналы контроллера ультразвуковых датчиков 130 для осуществления контроля скорости, объезда препятствия или других функций, примеры которых более подробно описаны в настоящем документе. [0092] В качестве дальнейшего примера конфигураций показан датчик 76'", представляющий собой лазерный датчик. В этом примере датчик 76'" используется для задания первой зоны обнаружения помех 132А, также именуемой левой зоной обнаружения помех, и второй зоны обнаружения помех 132В, также именуемой правой зоной обнаружения помех. Например, лазерный датчик 76'" может излучать лазерный луч перед комплектовщиком 10. При этом можно использовать несколько лазерных систем, или может излучаться один или более лазерных лучей, например, для растрового сканирования одной или более областей впереди комплектовщика 10. При этом лазерный датчик может независимо задавать и сканировать левую и правую зоны обнаружения помех, или же контроллер 103 может определять левую и правую зоны обнаружения помех при помощи растрового сканирования лазером(-ами). Кроме того, можно использовать переменные модели сканирования, если контроллер 103 может определить, где находится обнаруженное препятствие - справа или слева от комплектовщика 10. [0093] Несмотря на то, что для целей обсуждения показан лазерный сканер, в качестве дополнительных примеров можно привести использование других технологий обнаружения, примеры которых могут включать в себя ультразвуковые датчики, инфракрасные датчики и т.д. Например, ультразвуковые датчики, расположенные по сторонам комплектовщика 10, могут определять левую и правую зоны обнаружения помех 132А, 132В, а другие ультразвуковые датчики могут использовать для задания зон обнаружения, например, для ограничения скорости и др. [0094] Как показано, выход лазерного сканера 76'" обеспечивает два входных сигнала 110 на контроллер 103. Первый сигнал указывает на то, обнаружен ли объект в левой зоне обнаружения помех. Соответственно, второй сигнал указывает на то, обнаружен ли объект в правой зоне обнаружения помех. В зависимости от используемых технологий датчиков и обработки, входной(-ые) сигнал(ы) контроллера 103, указывающие на присутствие объекта в зонах обнаружения помех 132А, 132В, может(-гут) иметь другие форматы. В качестве еще одного примера, первая и вторая зоны обнаружения помех 132А, 132В могут быть определены и ультразвуковыми датчиками, и сканирующим лазером. В этом примере сканирующий лазер используется в качестве контроля с помощью избыточной информации для проверки надлежащего обнаружения объекта ультразвуковыми датчиками в левой или правой зонах обнаружения помех 132А, 132В. В качестве еще одного примера, ультразвуковые датчики могут использоваться для обнаружения объекта в левой или правой зонах обнаружения помех 132А, 132В, а сканирующий лазер может использоваться для распознавания или иного определения местоположения объекта с целью определения, в какой зоне обнаружения помех обнаружен объект - в левой или правой. В качестве альтернативы могут быть реализованы другие компоновки и конфигурации. Алгоритм [0095] В соответствии с различными особенностями настоящего изобретения алгоритм корректировки направления движения реализуется, например, контроллером 103. Как показано на фиг.10, алгоритм корректировки направления движения включает в себя определение наличия предупреждения о помехе движению на 152. Предупреждающий сигнал о помехе движению на 152 может представлять собой, например, обнаружение присутствия объекта в первой и/или второй зонах обнаружения помех 132А, 132В. При получении предупреждения об обнаружении помехи в зоне обнаружения помех, на 154 определяется, откуда получен сигнал - справа или слева от комплектовщика 10, например, находится ли обнаруженный объект в первой зоне обнаружения помех 132 или во второй зоне обнаружения помех 132В. Например, как показано на фиг.9, лазерный датчик 76'" может формировать два выходных сигнала, при этом первый выходной сигнал означает, что объект обнаружен в первой зоне обнаружения помех (левой) 132А, а второй -сигнал означает, что объект обнаружен во второй зоне обнаружения помех (правой) 132В. В качестве альтернативы, контроллер 103 может получать необработанный сигнал от лазерного сканера и обрабатывать/различать первую и вторую зоны обнаружения помех 132А, 132В, используя заданное картирование. [0096] Если сигнал обнаружения помехи указывает, что объект обнаружен в левой зоне обнаружения помех 132А, выполняется функция корректировки направления движения на 156, которая включает в себя вычисление угла корректировки направления движения для поворота комплектовщика 10 вправо в соответствии с первым набором параметров. В качестве иллюстрации, а не для ограничения, корректировка направления движения вправо, выполняемая на 156, может включать в себя поворот комплектовщика 10 вправо на некоторый угол. При этом угол поворота вправо может представлять собой фиксированную или переменную величину. Например, контроллер 103 может отдать контроллеру рулевого колеса 112 команду плавно повернуть на некоторый необходимый угол, например на 8-10 градусов, вправо. Благодаря плавному повороту на фиксированный угол, не будет резкого изменения угла колеса/колес, что обеспечивает более плавный ход. Однако может использоваться любой подходящий угол поворота (например, до 30, до 20, до 10, или до 5 градусов) в зависимости от типа машины, скорости и местоположения объекта относительно машины. Алгоритм отсчитывает расстояние, пройденное при повороте на угол коррекции, что может представлять собой функцию от длительности соответствующего сигнала об обнаружении помехи. [0097] В соответствии с различными примерами осуществления настоящего изобретения, может контролироваться угол поворота управляемого колеса для достижения, например, в основном фиксированного угла коррекции движения комплектовщика, представляющего собой функцию от пройденного расстояния. Расстояние, пройденное при маневре корректировки направления движения, может определяться на основании ряда параметров. Например, расстояние, пройденное при корректировке направления движения, может представлять собой расстояние, пройденное комплектовщиком 10 до тех пор, пока обнаруженный объект больше не будет находиться в соответствующей левой зоне обнаружения помех 132А. Пройденное расстояние также/в качестве альтернативы может представлять собой, например, расстояние, пройденное до истечения некоторого времени, до обнаружения другого объекта в любой из зон обнаружения помех, до превышения заданного максимального угла поворота и т.д. [0098] При выходе из правого поворота на 156, например, посредством выполнения комплектовщиком 10 маневра таким образом, чтобы в левой зоне обнаружения помех 132А объект не обнаруживался, выполняется компенсирующий маневр влево на 158. Компенсирующий маневр влево на 158 может включать в себя, например, поворот в противоположную сторону для соответствующей корректировки направления движения комплектовщика 10. Например, левый компенсирующий маневр может включать в себя поворот комплектовщика 10 на выбранный или иным образом определенный угол и движение на некоторое расстояние, представляющее собой некоторый процент от ранее пройденного расстояния. Угол поворота влево, используемый для левого компенсирующего маневра, может представлять собой фиксированную или переменную величину и может быть таким же, что и угол при выполнении корректировки вправо на 156, или же может от него отличаться. [0099] Для иллюстрации, а не для ограничения, расстояние для левого компенсирующего маневра на 158 может представлять собой любое подходящее расстояние, например, от одной четверти до половины расстояния, пройденного при совершении корректировки вправо на 156. Аналогичным образом, угол поворота влево при выполнении левого компенсирующего маневра может составлять примерно половину угла корректировки вправо на 156. Таким образом, предположим, что угол поворота вправо равняется 8 градусам, а пройденное расстояние -1 метр. В этом примере компенсация влево может равняться примерно половине корректировки вправо, или -4 градуса, при этом при компенсации влево пройденное расстояние будет составлять примерно от 1/4 метра до 1/2 метра. [00100] Конкретное расстояние и/или угол левого компенсирующего маневра на 158 (или, альтернативно, правого компенсирующего маневра на 162, сообразно обстоятельствам) может быть выбран таким образом, чтобы, например, предотвратить "столкновение" комплектовщика 10 по мере движения комплектовщика 10 для выбора правильного направления движения для ухода от обнаруженных препятствий. В качестве иллюстрации, если направление движения комплектовщика 10 корректируется на фиксированный градус на пройденное расстояние, контроллер 103 может определить величину изменения соответствующего угла движения комплектовщика и, таким образом, скорректировать левый компенсирующий маневр на 158 для возврата на первоначальный или на другой подходящий курс. Таким образом, комплектовщик сможет избежать движения из стороны в сторону по проходу и вместо этого сможет придерживаться курса в основном по центру прохода без необходимости проведения оператором комплектовщика утомительного ручного перемещения. Кроме того, левый компенсирующий маневр на 158 может изменяться в зависимости от конкретных параметров, используемых для выполнения корректировки вправо на 156. [00101] Соответственно, если сигнал обнаружения помехи указывает, что объект обнаружен в правой зоне обнаружения помех 132 В, выполняется функция корректировки направления движения на 160, которая включает в себя вычисление угла корректировки направления движения для поворота комплектовщика 10 влево в соответствии со вторым набором параметров. Для иллюстрации, а не для ограничения, корректировка направления движения влево, выполняемая на 160, может включать в себя поворот комплектовщика 10 влево на некоторый угол. При этом левый корректирующий маневр на 160 может выполняться образом, аналогичным описанному на 156, за тем исключением, что на 156 корректировка осуществляется вправо, а на 160 - влево. [00102] Аналогичным образом, при выходе из левого корректирующего поворота на 160, например, посредством выполнения комплектовщиком 10 маневра таким образом, чтобы в правой зоне обнаружения помех 132 В не обнаруживался никакой объект, выполняется правый компенсирующий маневр на 162. Правый компенсирующий маневр на 162 может включать в себя, например, выполнение поворота в противоположном направлении, чтобы скорректировать движение комплектовщика 10 в нужном направлении образом, аналогичным описанному на 158, за тем лишь исключением, что на 158 компенсирующий маневр выполняется влево, а на 162 компенсирующий маневр выполняется вправо. [00103] После выполнения компенсирующего маневра на 158 или 162, комплектовщик может вернуться в основном на прямой курс, например, 0 градусов на 164, и процесс начинается сначала в ожидании обнаружения другого объекта в любой из зон обнаружения помех 132А, 132В. [00104] Алгоритм может быть модифицирован таким образом, чтобы следовать различной реализации логики управления и/или использовать различные конечные автоматы для работы в различных предполагаемых обстоятельствах. Например, возможно, что второй объект переместиться в зону обнаружения помех 132А или 132В в процессе выполнения компенсирующего маневра для изменения направления движения. При этом комплектовщик 10 может итерационно пытаться изменить курс и объехать второй объект. В качестве еще одного наглядного примера, если объект(-ы) одновременно обнаружен(-ы) в левой и правой зонах обнаружения помех 132А, 132В, контроллер 103 может быть запрограммирован на сохранение текущего направления движения комплектовщика 10 (например, угол поворота ноль градусов) до тех пор, пока одна или более зон обнаружения помех 132А, 132В не будут свободными от препятствий или пока соответствующие зоны обнаружения 78', 78" не вызовут остановку комплектовщика 10. [00105] В соответствии с другими особенностями настоящего изобретения, пользователь и/или представитель сервисной организации может настраивать параметры реагирования алгоритма корректировки угла направления движения. Например, у представителя сервисной организации может быть доступ к средствам программирования для загрузки пользовательских переменных, например, в контроллер 103 для корректировки направления движения. В качестве альтернативы, у оператора комплектовщика могут быть средства управления, позволяющие ему вводить пользовательские параметры в контроллер, например, при помощи потенциометров, кодировщиков, программного пользовательского интерфейса и т.д. [00106] Выходной сигнал алгоритма, показанного на фиг.10, может представлять собой, например, выходной сигнал, задающий значение корректировки направления движения, которое может быть направлено контроллером 103 соответствующему механизму управления комплектовщиком 10. Например, значение корректировки направления движения может представлять собой значение корректировки направления движения +/-, например, соответствующее корректировке влево или вправо, которое передается модулю управления машиной, контроллеру рулевого колеса 112, например, как показано на фиг.2, или другому подходящему контроллеру. Кроме того, дополнительные параметры, которые могут быть редактируемыми, например, для изменения управления, могут включать в себя угол корректировки направления движения, скорость изменения угла корректировки направления движения, размер/диапазон зоны обнаружения помех для каждой зоны обнаружения помех, скорость комплектовщика при корректировке направления движения и проч. [00107] Как изображено на фиг.11, в качестве наглядного примера допустим, что комплектовщик 10 движется в ответ на дистанционный запрос на движение и что перед тем, как комплектовщик 10 сможет проехать заданное расстояние, комплектовщик 10 перемещается в положение, в котором ножка стеллажа 172 и соответствующая паллета 174 находятся в левой зоне обнаружения помех 132А. В соответствии с приведенным в качестве примера алгоритмом на фиг.10, комплектовщик 10, например, при помощи контроллера 103 может выполнить маневр по объезду препятствия, запустив алгоритм корректировки направления движения, чтобы повернуть комплектовщик вправо. Например, контроллер 103 может вычислить или иным образом получить или извлечь угол корректировки направления движения, который передается контроллеру рулевого колеса 112 для поворота ведущего(-их) колеса/колес комплектовщика 10. [00108] Комплектовщик 10 осуществляет корректировку направления движения до наступления события, такого как пропадание объекта, например, когда сканирующий лазер или использующий иную технологию датчик более не обнаруживает объект в левой зоне обнаружения помех 132. Допустим, что комплектовщик 10 проехал полметра при выполнении маневра корректировки направления движения с поворотом на 8 градусов. После обнаружения пропадания сигнала от левой зоны обнаружения помех выполняется обратная компенсация направления движения для компенсации изменения направления в результате корректировки. Например, при компенсации направления движения комплектовщик 10 может повернуть влево на 4 градуса и проехать примерно четверть метра. Для очень узких проходов датчики левой/правой зоны обнаружения помех могут посылать входные сигналы с очень большой частотой/небольшим промежутком времени между сигналами по сравнению с относительно более широкими проходами. [00109] Различные углы корректировки направления движения и соответствующей обратной компенсации направления движения можно определить эмпирическим путем либо углы, значения скорости корректировки, пройденное расстояние и т.д. можно вычислить, смоделировать или получить иным образом. [00110] В использованной в качестве примера конфигурации система будет пытаться удерживать комплектовщик 10 по центру прохода по мере продвижения комплектовщика 10 вперед в ответ на соответствующий запрос на движение, переданный по беспроводной связи передатчиком 70. Кроме того, отклонение, например, измеренное исходя из расстояния от центральной линии складского прохода, сглаживается. Более того, могут возникнуть определенные условия, когда комплектовщик 10 может потребовать вмешательства оператора для маневрирования вокруг некоторых объектов по линии движения. [00111] На фиг.12 график показывает измерение скорости комплектовщика 10 во время маневра объезда препятствия. График на фиг.13 показывает корректировку направления движения на заданный угол поворота, чтобы проиллюстрировать общую корректировку, выполняемую алгоритмом. График на фиг.14 показывает движение комплектовщика 10 как функцию, когда активирована корректировка направления движения и когда объект обнаружен в левой и/или правой зонах обнаружения помех. [00112] В соответствии с другими особенностями настоящего изобретения алгоритм корректировки направления движения может быть сконфигурирован таким образом, чтобы позволить машине приближаться к стене/стеллажу вместо того, чтобы держаться от стены и/или стеллажа на расстоянии. Например, добавление небольшого ухода (в выбранном направлении - влево или вправо) комплектовщику 10 позволит комплектовщику 10 держать дистанцию до стены или стеллажа с небольшим колебанием на его пути к фиксированной стене/стеллажу. [00113] Несмотря на то, что правая и левая зоны обнаружения помех 132А, 132В показаны по меньшей мере частично впереди движения комплектовщика 10 по направлению вперед, альтернативно и/или дополнительно могут быть реализованы другие конфигурации. Например, правая и левая зоны обнаружения помех в качестве альтернативы могут находиться по сторонам комплектовщика 10, например, как показаны правая и левая зоны обнаружения помех 123С, 132D на фиг.11. Комплектовщик 10 также может использовать первую пару из правой и левой зоны обнаружения помех по направлению движения комплектовщика 10 вперед, например, левую и правую зоны обнаружения помех 132А, 132 В, и вторую пару из левой и правой зон обнаружения помех 132С, 132D по сторонам комплектовщика 10. При этом конкретный алгоритм, используемый для выполнения корректировки направления движения, может быть одинаковым или отличным для каждой пар зон обнаружения помех. Зоны обнаружения помех 132С, 132D могут также или в качестве альтернативы включать в себя зоны остановки 78', 78", как описано выше. [00114] В качестве примера, боковые зоны обнаружения помех 132С, 132D могут использоваться для удержания курса комплектовщика 10 вблизи стеллажа, стены или для удержания иного курса. При этом может использоваться многозональность, например, для установления гистерезиса, когда контроллер 103 поддерживает курс, придерживаясь стены, стеллажа или другой конструкции между одним, наружным пределом и другим, внутренним пределом. В качестве еще одной иллюстративной альтернативы, допустим, что комплектовщик 10 должен оставаться справа от стеллажа или другой конструкции, расположенной слева от комплектовщика 10. Комплектовщик 10 может автоматически немного повернуть влево, чтобы приблизиться к конструкции. При этом, когда конструкция нарушает левую зону обнаружения помех 132С, корректировка направления движения, как более подробно описано в настоящем документе, уводит машину от конструкции. Однако поскольку корректировка направления движения сконфигурирована таким образом, чтобы изменять направление влево лишь чуть-чуть, комплектовщик 10, в конечном итоге, будет приближаться к конструкции до тех пор, пока комплектовщик 10 снова не переместится в результате корректировки направления движения. В качестве еще одного иллюстративного примера может быть выполнена компенсация направления движения, например, 158 на фиг.10, с намеренной чрезмерной компенсацией, удерживая таким образом комплектовщик 10 вблизи конструкции. [00115] В качестве еще одного иллюстративного примера, зоны обнаружения помех могут состоять из нескольких субзон, простирающихся концентрически (или по сторонам) от машины, при этом каждая субзона может быть связана с различными параметрами корректировки направления движения, например, чтобы можно было выполнить незначительную корректировку при обнаружении объектов на большем расстоянии от комплектовщика 10, чем объекты, обнаруженные ближе к комплектовщику 10. В качестве примера, корректировка направления движения может осуществляться на меньшую величину, например, на 2 градуса, при обнаружении объекта в самой дальней области или субзоне от машины; на промежуточную величину, например, на 4 градуса при обнаружении объекта в средней области; и на большую величину, например, на 8 градусов, при обнаружении объекта во внутренней области зоны обнаружения помех. В качестве дополнительных альтернатив, измерение расстояния до обнаруженного объекта, например, определяемое зоной обнаружения датчика препятствий, может использоваться для динамической настройки алгоритма корректировки направления движения (и - необязательно - также и скорости машины) для выполнения соответствующих маневров корректировки направления движения. Чтобы позволить контроллеру 103 выбрать и выполнить соответствующую корректировку направления движения/выбрать и задать соответствующую скорость, может использоваться база данных или таблица соответствий. [00116] В качестве еще одного наглядного примера, может быть необходимым выполнить первую, большую корректировку направления движения, например, на 10 градусов, при выполнении определенных заданных условий, и выполнить еще одну, меньшую корректировку направления движения, например, на 7 градусов, во всех прочих обстоятельствах. Например, допустим, что оператор ведет комплектовщик 10 и достигает конца прохода или ряда. Оператор затем поворачивает комплектовщик 10 на 180 градусов и въезжает в соседний проход. Возможно, оператор при въезде в соседний проход выполнит недостаточный или чрезмерный маневр таким образом, что направление движения комплектовщика 10 не может быть выровнено в проходе посредством выполнения другой, меньшей корректировки направления движения. В этой ситуации может оказаться необходимым выполнить большую корректировку направления движения, нежели обычно, чтобы комплектовщик 10 мог взять прямой курс движения в проходе. [00117] Условия, которые должны наступить до выполнения большей корректировки направления движения, могут изменяться, но в приведенном выше примере включают в себя: первым условием может быть достижение или превышение выбранной заранее скорости движения, например, 3 миль/ч. Вторым условием может быть достижение или превышение минимального угла движения, например 45 градусов. Третьим условием может быть присутствие оператора на борту комплектовщика 10 при наступлении первого и второго условия. В вышеприведенном примере, если каждое из этих трех условий наступило, контроллер 103 выполняет однократную большую корректировку направления движения, например, на 10 градусов, при обнаружении объекта в одной из зон обнаружения помех после наступления трех условий. Последующие корректировки направления движения будут меньшими, например, 7 градусов, до тех пор, пока все три условия снова не будут выполнены - при этом контроллер 103 выполнит еще одну однократную большую корректировку направления движения. [00118] После описания изобретения по настоящей заявке подробно и со ссылкой на различные примеры его осуществления будет очевидным, что возможны модификации и вариации без отклонения от объема изобретения, определенного в приложенной формуле изобретения.
Реферат
Группа изобретений относится к средствам корректировки направления движения подъемно-транспортной машины. Технический результат заключается в автоматизации выполнения маневра корректировки направления движения подъемно-транспортной машины с использованием по меньшей мере одного установленного на ней сенсорного датчика. Для этого подъемно-транспортная машина автоматически выполняет корректировку направления движения, если в зоне обнаружения помех впереди машины обнаружен объект. Контроллер определяет наличие объекта впереди подъемно-транспортной машины и автоматически определяет, в каком направлении необходимо выполнить корректировку направления движения - вправо или влево по ходу движения подъемно-транспортной машины. Подъемно-транспортная машина автоматически корректирует направление движения машины, например, на определенный угол в направлении, противоположном определенному направлению, в котором находится объект, и отсчитывает расстояние, пройденное машиной при выполнении корректировки направления движения. Затем машина автоматически выполняет обратную корректировку направления движения, например на определенное расстояние в направлении, противоположном направлению корректировки движения, на некоторый процент от пройденного расстояния. После выполнения обратной корректировки машина может, например, продолжить движение, в основном, в прямом направлении. 3 н. и 21 з.п. ф-лы, 14 ил.
Формула
получение первых сенсорных данных по меньшей мере от одного дистанционного датчика контроллером на подъемно-транспортной машине, когда полученные первые сенсорные данные определяют первую зону обнаружения помех, которая находится в непосредственной близости к подъемно-транспортной машине;
получение вторых сенсорных данных по меньшей мере от одного дистанционного датчика контроллером на подъемно-транспортной машине, когда полученные вторые сенсорные данные определяют вторую зону обнаружения помех, которая находится в непосредственной близости к подъемно-транспортной машине;
определение контроллером на основании полученных сенсорных данных, находится ли объект, по меньшей мере, в первой или второй зоне обнаружения помех; и
выполнение маневра корректировки направления движения, если контроллер обнаруживает объект в первой или второй зоне обнаружения помех, посредством:
определения контроллером необходимости выполнения маневра корректировки направления движения вправо или влево по направлению движения подъемно-транспортной машины на основании полученных сенсорных данных, определяющих первую и вторую зоны обнаружения помех;
выполнения маневра первой корректировки направления движения, если контроллер определит, что объект находится слева от подъемно-транспортной машины, посредством:
автоматической корректировки направления движения машины вправо на определенную величину корректировки;
отсчета расстояния, пройденного подъемно-транспортной машиной при выполнении автоматической корректировки направления движения машины вправо; и
выполнения автоматической обратной корректировки направления движения подъемно-транспортной машины влево на определенную величину обратной корректировки - процента от расстояния, пройденного во время корректировки направления движения;
выполнения маневра второй корректировки направления движения, если контроллер определит, что объект находится справа от подъемно-транспортной машины, посредством:
автоматической корректировки направления движения машины влево на определенную величину;
отсчета расстояния, пройденного подъемно-транспортной машиной при выполнении автоматической корректировки направления движения машины влево; и
выполнения автоматической обратной корректировки направления движения подъемно-транспортной машины вправо на определенную величину обратной корректировки - процент от расстояния, пройденного во время корректировки направления движения.
получение первых и вторых сенсорных данных со сканирующего лазерного устройства.
получение первых сенсорных данных по меньшей мере с одного ультразвукового датчика; и
получение вторых сенсорных данных по меньшей мере с одного дополнительного ультразвукового датчика.
использование ультразвуковых датчиков для обнаружения присутствия объекта в первой и второй зонах обнаружения помех; и
использование по меньшей мере одного сканирующего лазерного устройства для проверки результатов от ультразвуковых датчиков.
выполнение маневра корректировки направления движения включает в себя автоматическую корректировку направления движения машины на заданный угол поворота управляемого колеса таким образом, чтобы угол поворота комплектовщика как функция от пройденного расстояния был фиксированным.
отсчет расстояния, пройденного машиной до того момента, пока обнаруженный объект более не будет находиться в первой или второй зоне обнаружения помех.
силовой агрегат;
приспособление для подъема груза, соединенное с упомянутым силовым агрегатом;
по меньшей мере один бесконтактный датчик, установленный на упомянутом силовом агрегате для обнаружения объекта, расположенного на пути следования упомянутого силового агрегата; и
контроллер рулевого колеса, соединенного по меньшей мере с одним управляемым колесом машины для управления направлением движения машины;
контроллер тягового двигателя, соединенный с тяговым двигателем, который приводит в движение по меньшей мере одно управляемое колесо машины; и
главный контроллер, соединенный по меньшей мере с одним бесконтактным датчиком, контроллером тягового двигателя и контроллером рулевого колеса, причем главный контроллер выполнен с возможностью:
получать первые сенсорные данные по меньшей мере с одного бесконтактного датчика, который определяет первую зону обнаружения помех, находящуюся в непосредственной близости от подъемно-транспортной машины;
получать вторые сенсорные данные по меньшей мере с одного бесконтактного датчика, который определяет вторую зону обнаружения помех, находящуюся в непосредственной близости от подъемно-транспортной машины;
на основании полученных сенсорных данных определять, находится ли объект по меньшей мере в первой или второй зоне обнаружения помех; и
выполнять маневр корректировки направления движения, если главный контроллер обнаруживает объект по меньшей мере в одной из первой и второй зон обнаружения помех путем
автоматического определения необходимости выполнения маневра корректировки направления движения вправо или влево по направлению движения подъемно-транспортной машины на основании полученных сенсорных данных, определяющих первую и вторую зоны обнаружения помех;
выполнения первого маневра корректировки направления движения, если главный контроллер определяет, что объект находится слева от подъемно-транспортной машины, посредством:
автоматической корректировки направления движения машины вправо на определенную величину корректировки;
отсчета расстояния, пройденного подъемно-транспортной машиной при выполнении автоматической корректировки направления движения машины вправо; и выполнения автоматической обратной корректировки направления движения подъемно-транспортной машины влево на определенную величину обратной корректировки - процент от расстояния, пройденного во время корректировки направления движения;
выполнения второго маневра корректировки направления движения, если главный контроллер определяет, что объект находится справа от подъемно-транспортной машины, посредством:
автоматической корректировки направления движения машины влево на определенную величину корректировки;
отсчета расстояния, пройденного подъемно-транспортной машиной при выполнении автоматической корректировки направления движения машины влево; и
выполнения автоматической обратной корректировки направления движения подъемно-транспортной машины вправо на определенную величину обратной корректировки - процент от расстояния, пройденного во время корректировки направления движения.
получение сенсорных данных, по меньшей мере с одного датчика, контроллером подъемно-транспортной машины;
определение на основе сенсорных данных, что объект находится в ближайшем окружении машины, и
выполнение маневра направления движения по приближению к обнаруженному объекту так, чтобы обнаруженный объект находился между внешним пределом и внутренним пределом для перемещения машины.
направление движения машины к обнаруженному объекту, если объект обнаружен снаружи внешнего предела, и
направление движения машины от обнаруженного объекта, если объект обнаружен внутри внутреннего предела