Устройство взаимосвязи усилий между органами пилотирования, орган пилотирования и воздушное судно - RU2615897C2
Код документа: RU2615897C2
Чертежи
Описание
Область техники
Настоящее изобретение относится к устройству взаимосвязи усилий для взаимосвязи усилий между по меньшей мере двумя органами пилотирования воздушного судна, содержащему устройство пилотирования, снабженное для каждого органа управления воздушного судна двумя такими органами пилотирования, связанными (полностью механической кинематической цепью или по крайней мере частично электрически) с этим органом управления таким образом, что воздушное судно могут пилотировать одновременно два лица: командир борта (или пилот) и второй пилот.
В данном описании термин «пилотирование» и его производные подразумевают, если не указано иное, управление воздушным судном по меньшей мере одним человеком-пилотом, управляющим по меньшей мере одним органом пилотирования, таким как рукоятка, рычаг, педаль руля, педаль и т.п., связанным, по меньшей мере, с одним органом управления, таким как рулевая поверхность или управление газом воздушного судна. Кроме того термин «усилие» используется для обозначения как крутящего момента, так и силы, в соответствии с тем, куда приложено это усилие (крутящего момента, если речь идет о вращении, или силы, если это касается поступательного перемещения).
Уровень техники
Когда воздушное судно должно управляться одновременно пилотом и вторым пилотом, известно соединение между собой органов пилотирования или рукояток каждого пилота, так что каждая рукоятка синхронно перемещается под действием другой рукоятки, и каждый пилот может ощущать на своей рукоятке усилие, прилагаемое другим пилотом к своей рукоятке. Традиционно эта взаимосвязь усилий между органами пилотирования осуществляется с помощью системы тяг или тросов, механически соединяющих два органа пилотирования.
Однако когда органы пилотирования являются органами электрического или электронного типа, необходимо имитировать поведение традиционных механических рукояток, например, с помощью электромоторов. Из патентного документа US 5291113 известно устройство пилотирования, содержащее устройство взаимосвязи, осуществляющее взаимосвязь перемещений и сил, прикладываемых к рукояткам пилота и второго пилота. Это устройство пилотирования содержит для каждого органа пилотирования ручку управления, связанную с датчиком усилия (в виде датчика крутящего момента) и с датчиком положения. Каждый датчик крутящего момента подает сигнал, представляющий крутящий момент, оказываемый/воспринимаемый пилотом (или соответственно вторым пилотом) на ручке управления. Из сигнала положения, подаваемого датчиком положения, и величины усилия обратной связи, образуемой суммой сигналов крутящего момента, сумматор генерирует погрешность крутящего момента, передаваемую затем на электронный регулятор, который подает соответствующий электрический ток управления на электромотор для исправления этой погрешности крутящего момента и модификации крутящего момента, ощущаемого пилотом (соответственно, вторым пилотом).
Такое устройство взаимосвязи усилий имеет тот недостаток, что оно ухудшает ощущение усилия пилотом, имитируя связь, сравнимую с жесткой тягой между органами пилотирования пилота и второго пилота. Однако в механических системах такая тяга обычно дополнена устройством, разъединяющим рукоятки пилотов, когда усилие, передаваемое одной рукояткой на другую, превышает предварительно определенный предел. Такое «разъединение» не выполняется в известных устройствах взаимосвязи уровня техники, а ограничение усилий достигается только когда взаимосвязанные усилия пилота и второго пилота приведут к насыщению электрического тока, подаваемого к мотору. В этом случае подаваемое мотором усилие против усилия пилота становится постоянным и уже не позволяет ему ощущать положение по отношению к общему перемещению рукоятки. Также, если предусмотрены закономерности изменения усилия, такие как ограничители или проходимые позиции, как функции положения (например, вибрации, вызываемые вибратором рукоятки для тактильного предупреждения о ситуации, близкой к потере скорости), они «гасятся» насыщенностью управления электромотора.
Раскрытие изобретения
Задачей настоящего изобретения является создание устройства взаимосвязи для взаимосвязи между органами пилотирования, лишенного недостатков известных решений уровня техники.
В соответствии с изобретением предусмотрено также создание устройства, позволяющего достигать «разъединения» между рукоятками пилота и второго пилота, когда создаваемое одним из них усилие превышает предварительно определенный предел.
В задачи изобретения входит также улучшение динамики органа пилотирования при сохранении достаточно высоких пределов насыщения управления электромотора.
В задачи изобретения входит также создание такого устройства взаимосвязи, которое позволяет учитывать наличие пассивных возвратных устройств, таких как пружины и/или демпферы, связанных с ручкой управления органа пилотирования параллельно активным устройствам (моторам, различным приводам и т.д.).
Для этого в соответствии с изобретением создано устройство взаимосвязи усилий для взаимосвязи усилий между первым органом пилотирования с обратной связью по усилию и вторым органом пилотирования с обратной связью по усилию, причем каждый орган пилотирования содержит ручку управления, подвижную относительно рамы, и, по меньшей мере, один датчик усилия, выполненный с возможностью предоставления величины усилия, называемого усилием пилотирования, оказываемого пилотом на ручку управления, при этом указанное устройство выполнено с возможностью формирования величины усилия обратной связи из суммы величин усилий пилотирования на каждом органе пилотирования, отличающееся тем, что дополнительно содержит устройство коррекции, выполненное с возможностью ограничения указанной величины усилия обратной связи как функции, по меньшей мере, одного параметра, взятого среди абсолютной величины усилия пилотирования указанного второго органа пилотирования и разности между величинами усилий пилотирования каждого органа пилотирования.
При таком вводе коррекции величины усилия обратной связи либо как функции разности между усилиями пилотирования каждого органа пилотирования, либо как функции абсолютной величины усилия пилотирования второго органа, можно ограничивать влияние величин усилий пилотирования от других органов пилотирования на усилие пилотирования данного органа пилотирования. В частности, в устройстве пилотирования, содержащем два органа пилотирования, например, рукоятку командира борта (рукоятку пилота) и рукоятку второго пилота, если рукоятку второго пилота по каким-то причинам заклинило или если пилот и второй пилот приводят в действие свои рукоятки в противоположных направлениях, коррекция усилия обратной связи как функция разности, которая в этом случае значительная, между усилиями пилотирования пилота и второго пилота вводит форму гибкости в принципиально жесткую связь между двумя рукоятками. Таким же образом за счет ограничения абсолютной величины усилия второго пилота, передаваемого на рукоятку пилота, можно сохранять в усилии пилотирования пилота составляющую усилия, вычисленную как функцию условий полета, например, положения рукоятки, без маскировки возможных проходимых ограничителей (например, вибрации, вызываемые вибратором рукоятки для тактильного предупреждения о ситуации, близкой к потере скорости) или других тактильных ощущений, представляющих конкретное состояние или ситуацию, которая при отсутствии этого ограничения была бы скрыта из-за насыщения тока, подаваемого на электромотор.
Предпочтительно в соответствии с изобретением устройство коррекции содержит, по меньшей мере:
компаратор, выполненный с возможностью получения разности величин усилий пилотирования каждого органа пилотирования,
блок коррекции с зоной нечувствительности, выполненный с возможностью предоставления величины коррекции, по существу равной нулю, если эта разность усилий меньше предварительно определенного порога, или величины коррекции, по существу равной абсолютной величине разности усилий за минусом величины порога с присвоением знака разности, когда эта разность превышает предварительно определенный порог, и
сумматор для формирования величины усилия обратной связи из суммы усилий пилотирования и величины коррекции.
Благодаря зоне нечувствительности блока коррекции, которая образует диапазон нечувствительности для разности усилий пилотирования между каждым органом пилотирования, когда эта разность не превышает предварительно определенного порога, устройство взаимосвязи по изобретению ведет себя как жесткая связь между рукоятками органов пилотирования. Когда разность усилий пилотирования превышает порог, устройство ведет себя в отношении рассматриваемого органа пилотирования как ограничитель усилия пилотирования, передаваемого другим органом (другими органами) пилотирования и тем самым предоставляет возможность углового изменения между различными рукоятками органов пилотирования.
Предпочтительно в соответствии с изобретением предварительно определенный порог равен удвоенному значению предела допустимого усилия разъединения. В традиционной механической системе это допустимое усилие разъединения соответствует силе, начиная с которой две рукоятки пилота и второго пилота уже не связаны жестко друг с другом. Поэтому, когда коэффициент усиления коррекции, как функции разности, равен единице, влияние усилий пилотирования от второго органа пилотирования ограничивается до допустимого усилия разъединения, а усилие пилотирования, оказываемое/ощущаемое пилотом по существу соответствует половине усилия, которое он ощущал бы, если бы пилотировал один, плюс фиксированное усилие, равное величине предела допустимого усилия разъединения и информирующее его об отклонении от нормы между двумя рукоятками.
Предпочтительно в соответствии с изобретением предварительно определенный порог является переменным в функции разности между сигналами, представляющими положение ручки управления каждого органа пилотирования. Таким образом, в этом варианте выполнения устройства взаимосвязи в соответствии с изобретением допустимое усилие разъединения является переменным в функции разности положений между рукояткой пилота и рукояткой второго пилота. Чем больше эта разность, тем выше предельное усилие разъединения.
Предпочтительно в соответствии с изобретением устройство коррекции дополнительно содержит пороговый компаратор на выходе блока коррекции с зоной нечувствительности, выполненный с возможностью подачи сигнала разъединения, когда выходной сигнал блока коррекции не равен нулю. При этом сигнал разъединения между рукоятками пилотов уже не зависит от тока в электромоторе органа пилотирования, подверженного воздействию высоких динамических перемещений, что обеспечивает надежность сигнала разъединения.
Предпочтительно в соответствии с изобретением во втором примере выполнения устройства взаимосвязи по изобретению устройство коррекции содержит, по меньшей мере, один сатуратор, выполненный с возможностью ограничения величины усилия пилотирования второго органа до предельной величины допустимого усилия разъединения. Этот пример выполнения, более простой и более экономичный, чем предыдущий пример, тем не менее позволяет выполнять большинство функций устройства взаимосвязи усилий. При этом во втором примере выполнения два органа пилотирования (пилота и второго пилота) не обязательно насыщаются одновременно, а регистрация разъединения осуществляется только на одном органе пилотирования (за исключением мониторинга насыщения усилия указанного первого органа пилотирования, также как и второго органа пилотирования).
Предпочтительно в соответствии с изобретением указанная предельная величина допустимого усилия разъединения является переменной, а указанное устройство коррекции выполнено с возможностью определения предельной величины допустимого усилия разъединения как функции разности между сигналами, представляющими положение ручки управления каждого органа пилотирования.
Предпочтительно в соответствии с изобретением устройство коррекции дополнительно сдержит компаратор, выполненный с возможностью получения разности между величиной усилия пилотирования второго органа и величиной выходного сигнала сатуратора подачи сигнала разъединения, когда эта разность не равна нулю. Разность между входным и выходным сигналами сатуратора равна нулю, пока сатуратор не вмешивается для ограничения усилия пилотирования второго пилота. Как только возникает ограничение, разность становится не нулевой, и выдается сигнал, представляющий разъединение между двумя рукоятками.
Предпочтительно в соответствии с изобретением, независимо от примера осуществления изобретения, устройство взаимосвязи усилий содержит выход, выполненный с возможностью управления индикатором разъединения, когда сигнал разъединения активизирован. Этот индикатор может быть визуальным (сигнальная лампочка), звуковым или в форме предупреждения на экране в поле зрения пилотов.
Предпочтительно в соответствии с изобретением устройство сочетания усилий дополнительно содержит счетчик, активизируемый сигналом разъединения, выполненный с возможностью размыкания выключателя, что позволяет изолировать первый орган пилотирования от сигнала усилия пилотирования второго органа пилотирования после предварительно определенного времени. Так например, при заклинивании рукоятки одного из органов пилотирования она отсоединяется от устройства взаимосвязи и дает возможность независимого пилотирования оставшимся органом пилотирования.
Изобретение распространяется также на орган пилотирования, выполненный с возможностью сопряжения со вторым органом пилотирования того же типа, содержащий, по меньшей мере:
- ручку управления, обладающую, по меньшей мере, одной степенью свободы,
- датчик усилия, выполненный с возможностью подачи величины усилия, называемого усилием пилотирования, оказываемого пилотом на ручку управления,
- датчик положения, выполненный с возможностью подачи сигнала положения ручки управления,
- компьютер, выполненный с возможностью:
- вычисления из сигнала положения величины теоретического усилия управления, называемого усилием управления,
- формирования величины усилия обратной связи из величины усилия пилотирования и величины усилия пилотирования от сопряженного органа пилотирования,
- формирования величины погрешности усилия из усилия управления и указанной величины усилия обратной связи,
- управления на основе указанной величины погрешности усилия приводом, выполненным с возможностью модулирования усилия пилотирования,
отличающийся тем, что компьютер содержит устройство коррекции для коррекции величины усилия обратной связи, выполненный с возможностью ограничения этой величины усилия обратной связи как функции разности между усилиями пилотирования каждого органа пилотирования. Следовательно, орган пилотирования в соответствии с изобретением содержит устройство взаимосвязи усилий в соответствии с изобретением для взаимосвязи усилий со вторым органом пилотирования. Благодаря интеграции устройства взаимосвязи усилий в соответствии с изобретением, в частности, устройства для коррекции величины усилия обратной связи в компьютер каждого органа пилотирования, получен орган пилотирования, который требует всего лишь одно соединение для получения сигнала усилия пилотирования от второго органа пилотирования, чтобы достичь взаимосвязи между двумя органами пилотирования. При этом установка устройства пилотирования, содержащего, по меньшей мере, два органа пилотирования, таким образом, значительно упрощается по сравнению с эквивалентным механическим устройством.
Изобретение распространяется также на воздушное судно, содержащее устройство пилотирования, содержащее, по меньшей мере, два сопряженных органа пилотирования, обладающие всеми отличительными признаками или частью отличительных признаков, которые были упомянуты выше или будут упомянуты дальше, в частности, содержащее устройство взаимосвязи усилий для взаимосвязи усилий между первым и вторым органами пилотирования с обратной связью по усилию.
Изобретение относится также к устройству взаимосвязи усилий, к органу пилотирования и воздушному судну, характеризующиеся сочетанием всех или части отличительных признаков, упомянутых выше или далее.
Краткий перечень чертежей
Другие цели, отличительные признаки и преимущества изобретения будут ясны из последующего описания со ссылками на прилагаемые чертежи. На чертежах:
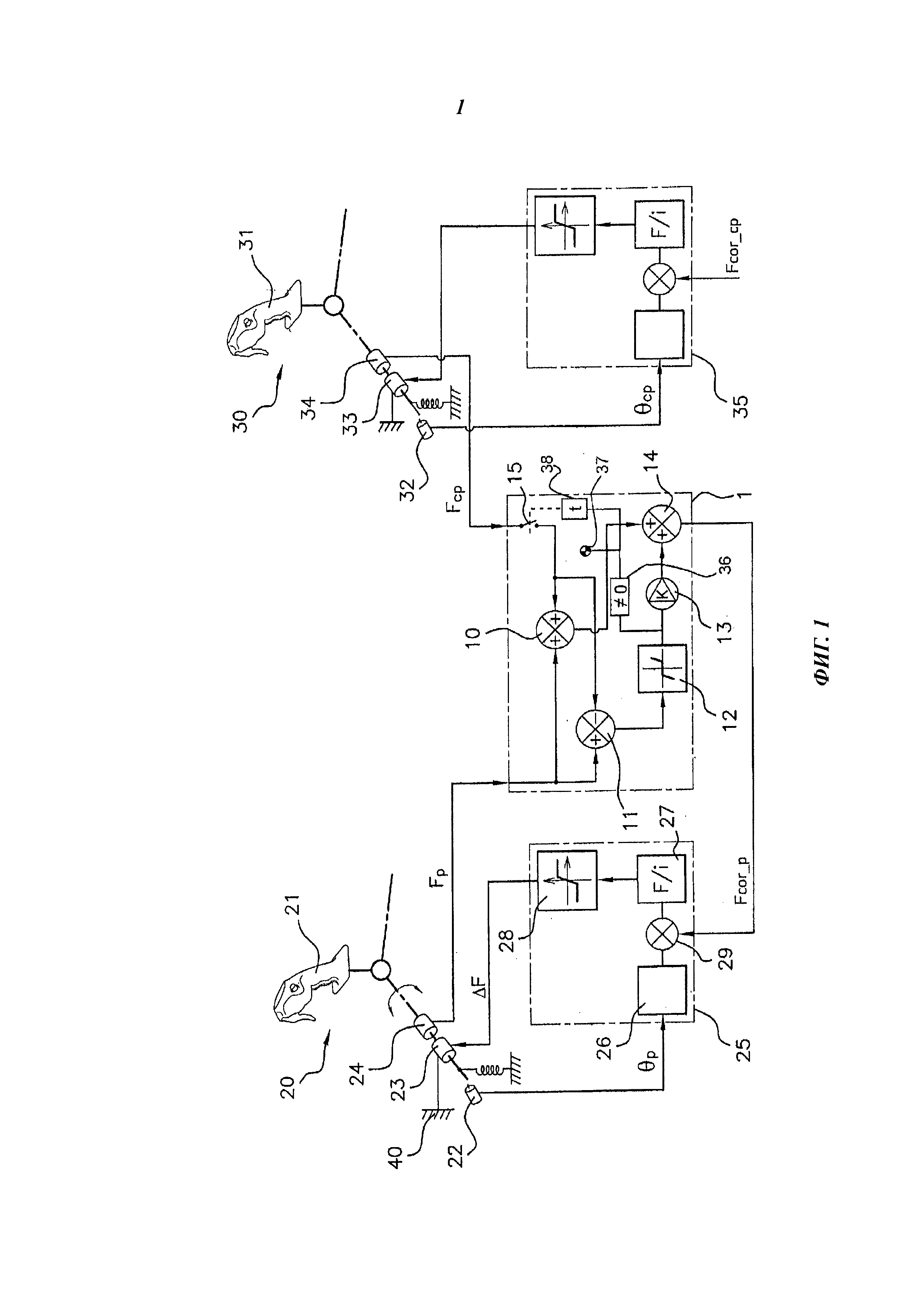
фиг. 1 схематично изображает устройство пилотирования, содержащее два органа пилотирования, по меньшей мере, один из которых содержит устройство взаимосвязи усилий в соответствии с первым примером осуществления изобретения;
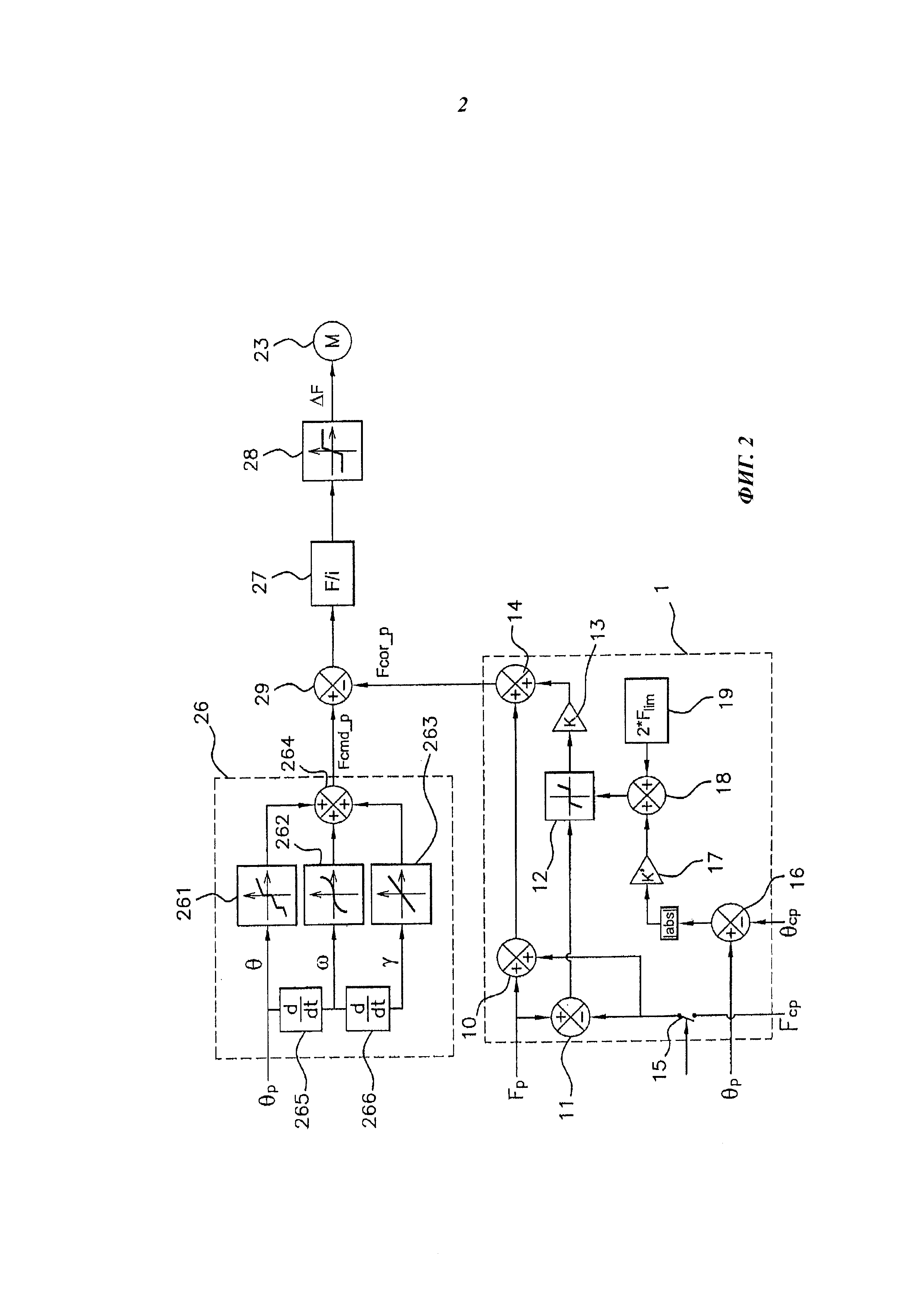
фиг. 2 более подробно изображает блок-схему управляющего элемента органа пилотирования, содержащего устройство взаимосвязи усилий в соответствии с вариантом первого примера осуществления изобретения;
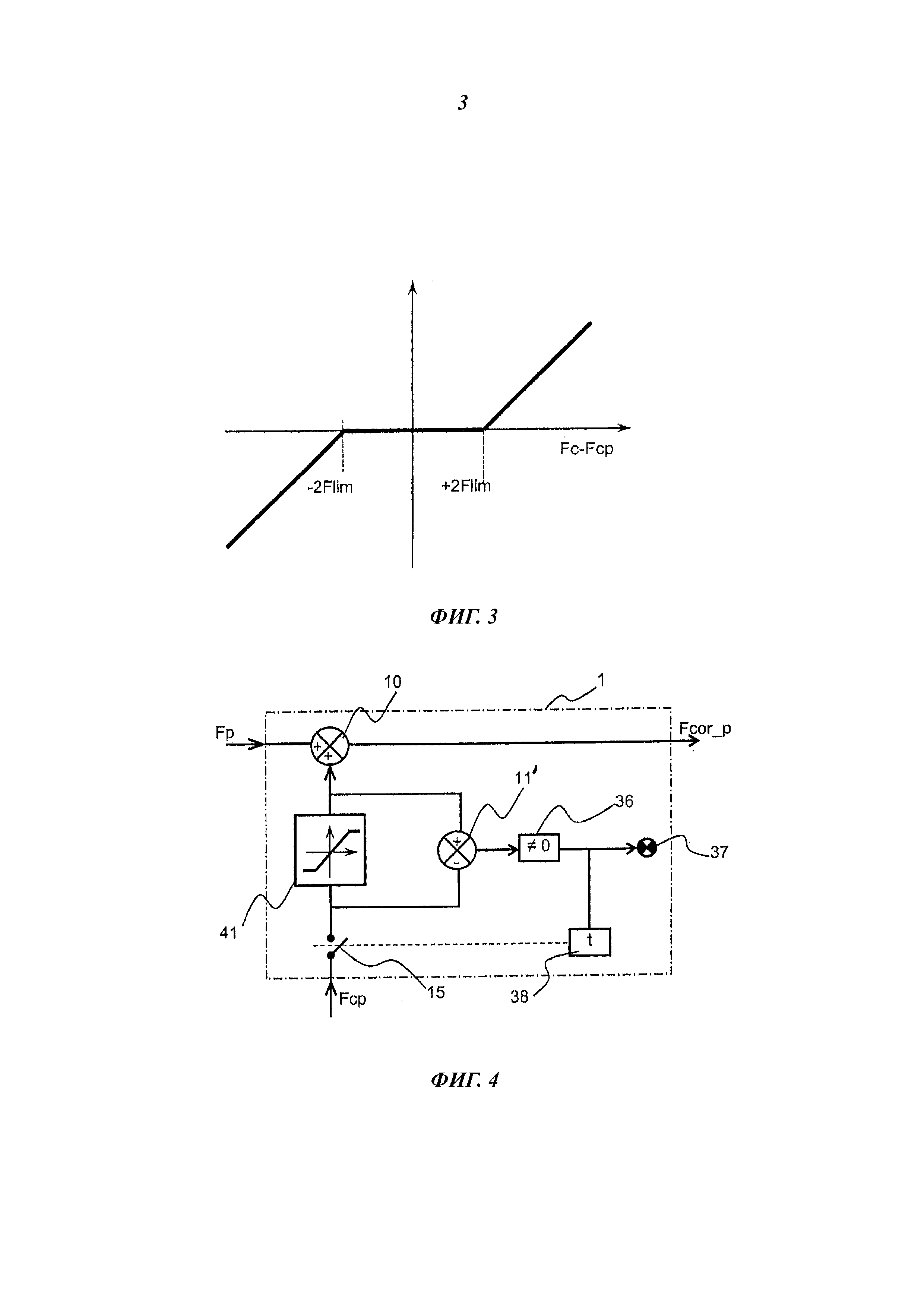
фиг. 3 изображает диаграмму передаточной функции блока коррекции с зоной нечувствительности, используемого в первом примере осуществления изобретения;
фиг. 4 изображает устройство взаимосвязи усилий в соответствии с со вторым примером осуществления изобретения.
Осуществление изобретения
На фиг. 1 показаны два органа пилотирования, в данном случае две мини-рукоятки 20 и 30 пилотирования воздушного судна. Эти мини-рукоятки содержат ручку 21 (и, соответственно, 31) управления, каждая из которых предназначена для манипулирования пилотом (и, соответственно, вторым пилотом). Эти ручки управления могут стандартным способом поворачиваться вокруг двух действующих одновременно взаимно перпендикулярных осей, соединяющихся в центральной точке. В показанном примере выполнения полностью представлена только одна из двух осей каждого органа пилотирования, например, ось тангажа, а другую, аналогичную ось можно установить по аналогии. В данном примере оказываемые усилия являются усилиями, относящимися к повороту, так что здесь для его обозначения будет использоваться термин «крутящий момент», который не следует интерпретировать как ограничение, например, в том случае, когда ручки являются ручками линейного перемещения, а оказываемое усилие является силой в направлении поступательного перемещения ручки.
Мини-рукоятка 20, например, предназначенная для пилота (командира борта), содержит последовательно вдоль оси тангажа датчик 24 крутящего момента, выполненный с возможностью подачи сигнала, представляющего величину усилия при приложении пилотом крутящего момента Fp к ручке управления. Датчик 24 крутящего момента соединен, с одной стороны, с ручкой 21 управления и, с другой стороны, с электромотором 23, выполненным с возможностью приложения крутящего момента ΔF к оси ручки управления. Ротор электромотора 23 может быть, например, интегрирован с осью тангажа, тогда как его статор соединен с рамой 40 органа пилотирования. Датчик 22 положения также установлен последовательно на оси тангажа и позволяет подавать сигнал положения θр, здесь сигнал углового положения ручки управления. Само собой разумеется, что ось мини-рукоятки может также содержать «пассивные» элементы, такие как пружины или демпферы, соединенные с рамой.
Симметричным образом предназначенная для второго пилота мини-рукоятка 30 содержит ручку 31 управления, датчик 34 крутящего момента, подающий сигнал, представляющий величину крутящего момента Fcp, оказываемого вторым пилотом на ручку управления, электромотор 33 и датчик 32 положения, подающий информацию об угловом положении Вер ручки управления второго пилота.
В дальнейшем тексте, когда параметры относятся к органу пилотирования пилота, им присваивается индекс р. Когда те же параметры относятся к органу пилотирования второго пилота, им присваивается индекс ср.
Мини-рукоятка 20 пилота содержит вычислительное устройство 25, содержащее первый блок 25 управления, предназначенный для приема сигнала положения θр, подаваемого датчиком 22 положения, и выдачи теоретического усилия Fcmd_p управления, которое должно быть оказано пилотами совместно на их соответствующие рукоятки. Это теоретическое усилие Fcmd_p управления передается на сумматор 29, в котором оно сравнивается с усилием Fcor_p обратной связи, поставляемым устройством 1 взаимосвязи усилий из суммы усилий Fp и Fcp пилотирования. Процесс вычисления величины усилия Fcor_p обратной связи будет описан ниже.
Таким образом, сумматор 29 подает сигнал, соответствующий погрешности крутящего момента, на контроллер 27, в котором эта погрешность крутящего момента преобразуется в электрический ток, пригодный для подачи на электромотор 23. Выходной сигнал контроллера 27 передается на сатуратор 28, в котором ток для управления электромотором 23 ограничивается до предварительно определенной величины тока насыщения. Выходной сигнал сатуратора 28 подается в виде сигнала ΔF управления электромотором 23, представляющего изменение крутящего момента, которое должен быть приложено к оси тангажа и, следовательно, к ручке 21 управления.
В первом примере осуществления изобретения устройство 1 взаимосвязи усилий, сопряженное с мини-рукояткой 20, вычисляет величину усилия Fcor_p обратной связи из усилий Fp и Fcp пилотирования, приходящих соответственно от датчика 24 крутящего момента мини-рукоятки 20 пилота и датчика 34 крутящего момента мини-рукоятки второго пилота. Сумматор 10 вычисляет сумму Fp+Fcp и передает ее на второй сумматор 14.
Усилия Fp и Fcp пилотирования передаются также на компаратор 11, выполненный с возможностью получения разности между величинами этих усилий пилотирования. Выходной сигнал компаратора 11 затем передается на блок 12 коррекции с зоной нечувствительности. Передаточная функция блока 12 коррекции лучше понятна в совокупности с диаграммой на фиг. 3. Разность Fp-Fcp представлена на оси абсцисс диаграммы по фиг. 3, а выходной сигнал блока 12 коррекции соответствует ординате диаграммы. Зона нечувствительности блока 12 коррекции проходит между отрицательным порогом -2Flim и положительным порогом +2Flim, симметричными друг другу относительно начала координат. Абсолютную величину каждого порога выбирают такой, чтобы она была равна удвоенному предварительно определенному усилию Flim, представляющему усилие, которое называется допустимым усилием разъединения, соответствующему максимальному допустимому усилию, оказываемому одной рукояткой на другую до того, как две рукоятки снова получат относительную свободу перемещения относительно друг друга. Таким образом, когда разность Fp-Fcp в алгебраической величине находится в пределах зоны нечувствительности блока 12 коррекции, его выходной сигнал равен нулю. Как только величина разности Fp-Fcp превышает один или другой порог, выходной сигнал блока 12 коррекции становится равен величине разности за минусом величины ближайшего порога.
Далее выходной сигнал блока 12 коррекции передается, с одной стороны, на усилитель 13, который имеет коэффициент К усиления и выход которого соединен со вторым входом второго сумматора 14. Далее второй сумматор 14 вычисляет сумму величины коррекции усилия обратной связи как функции разности Fc-Fcp усилий пилотирования и суммы Fc+Fcp этих усилий пилотирования. Затем выходной сигнал второго сумматора 14 представляет скорректированное усилие Fcor-p обратной связи, которое затем передается на сумматор 29 вычислительного устройства 25.
Когда коэффициент K усиления равен 1, скорректированное усилие Fcor-p обратной связи равно:
сумме Fp+Fcp усилий пилотирования на двух рукоятках 20 и 30, если разность Fp-Fcp находится между двумя порогами зоны нечувствительности блока 12 коррекции;
двойной величине разности усилия Fp пилотирования и величины ближайшего порога, то есть 2(Fp-Fljm), если усилие Fp пилотирования, оказываемое пилотом, превышает усилие Fcp пилотирования, оказываемое вторым пилотом, или 2(Fp+Flim) в обратном случае.
Ввод скорректированного усилия Fcor-p обратной связи в контур управления электромотором 23 позволяет также для усилия Fp пилотирования, оказываемого пилотом, получать:
Fp=Fcmd_p-Fcp, если разность Fp-Fcp усилий пилотирования пилота и второго пилота меньше абсолютной величины 2Flirn
Fp=½Fcmd_p+Flim, ели усилие пилотирования, оказываемое пилотом, превышает усилие второго пилота;
Fp=½Fcmd_p-Fljm, ели усилие пилотирования, оказываемое вторым пилотом, превышает усилие пилота.
Таким образом, можно заметить, что во всех случаях оказываемое пилотом усилие зависит от теоретического усилия Fcmd_p управления и что изменения усилия, вводимые в теоретическое усилие управления, остаются ощущаемыми пилотом, даже когда разность усилий пилотирования между двумя рукоятками превышает предел разъединения.
Выходной сигнал блока 12 коррекции, с другой стороны, подается на детектор 36 порога, который подает сигнал разъединения, когда выходной сигнал блока 12 коррекции не равен нулю. Этот сигнал разъединения подается затем на индикатор 37 разъединения, который может быть сигнальной лампочкой и/или звуковым сигналом и/или предупредительным сообщением на экране, чтобы осведомить экипаж о появлении ненормальной разнице между рукоятками пилота и второго пилота.
Сигнал разъединения подается также на счетчик 38, предназначенный для обратного отсчета предварительно определенного промежутка времени и по его истечении размыкания выключателя 15 для того, чтобы изолировать устройство 1 взаимосвязи усилий от усилия Fcp пилотирования, поддаваемого датчиком 34 крутящего момента мини-рукоятки 30. Начиная с этого момента мини-рукоятка 20 пилота совершенно независима от мини-рукоятки 30.
Выше было описано устройство взаимосвязи усилий по изобретению применительно к мини-рукоятке 20 пилота. Очевидно, что такое устройство полностью симметрично между мини-рукояткой 20 пилота и мини-рукояткой 30 второго пилота. Поэтому устройство взаимосвязи усилий, идентичное устройству 1, с соответствующей перестановкой усилий Fp и Fcp пилотирования, сопряжено с мини-рукояткой 30 для подачи откорректированного усилия Fcor_cp обратной связи на сумматор компьютера 35.
Далее со ссылкой на фиг. 2 будет подробно описан вариант выполнения устройства взаимосвязи усилий в соответствии с изобретением.
В дальнейшем описании использованы те же самые позиции для элементов, идентичных элементам по фиг. 1.
Уже был описан блок 26 управления, который получает на входе сигнал θр положения от датчика 22 положения. Этот сигнал положения передается непосредственно на справочную таблицу 261, предназначенную для предоставления первой величины усилия управления как функции положения θр.
Сигнал θр также дифференцируется в первом блоке 265 дифференцирования для предоставления сигнала ω, соответствующего скорости перемещения ручки 21 управления. Этот сигнал ω передается на вторую справочную таблицу 262, предназначенную для предоставления величины усилия, соответствующего усилию демпфирования как функции скорости перемещения ручки управления.
Таким же образом сигнал ω поступает во второй блок 266 дифференцирования для предоставления сигнала γ, представляющего ускорение ручки 21 управления. Этот сигнал затем передается на вход третьей справочной таблицы 263 для получения величины усилия управления, соответствующей инерции ручки 21 управления.
Эти три величины усилия управления далее обрабатываются в сумматоре 264 для получения результирующей величины теоретического усилия Fcmd_p управления. Затем это теоретическое усилие Fcmd_p управления сравнивается с откорректированным усилием Fcor_p обратной связи в сумматоре 29 для определения, после прохождения через контроллер 27 и сатуратор 28, коррекции ΔF усилия, подлежащей приложению посредством электромотора 23.
Откорректированное усилие Fcor_p обратной связи вычисляется в устройстве 1 взаимосвязи усилий, которое, как и в примере по фиг.1, содержит первый сумматор 10, компаратор 11 для получения разности усилий пилотирования от рукоятки пилота и рукоятки второго пилота и блок 12 коррекции с зоной нечувствительности. Блок 12 коррекции содержит дополнительный вход, позволяющий регулировать пороговые величины, определяющие ширину зоны нечувствительности. В этом варианте устройство 1 взаимосвязи усилий также содержит вход, выполненный с возможностью приема сигнала θр положения, подаваемого датчиком 22 положения мини-рукоятки 20, и вход, выполненный с возможностью приема сигнала θср положения от датчика 32 положения мини-рукоятки 30. Компаратор 16 получает разность θр-θср, абсолютная величина которой передается на усилитель 17 с коэффициентом K' усиления. Выходной согнал усилителя 17 передается на сумматор 18, который получает на свой другой вход величину порога, равную 2 Flim, из запоминающего устройства 19. При этом от выхода сумматора 18 на блок 12 коррекции передается величина порога зоны нечувствительности как переменная в функции разности сигналов положения, подаваемых соответствующими датчиками положения каждой мини-рукояти 20 и 30.
Таким образом, скорректированное усилие Fcor-p обратной связи является функцией, с одной стороны разности между усилиями пилотирования и, с другой стороны, разности между положениями ручек управления мини-рукояток пилота и второго пилота.
Во втором примере выполнения устройства 1 взаимосвязи усилий в соответствии с изобретением, показанном на фиг. 4, устройство 1 содержит сатуратор 41 усилия, включенный последовательно между входом усилия Fcp пилотирования второго пилота и сумматором 10. Сатуратор 41 усилия содержит ограничительные величины, предусмотренные для ограничения величины усилия Fcp пилотирования до величины, соответствующей величине Flim допустимого усилия разъединения. Таким образом, усилие Fcor-p обратной связи равно Fp+Fcp, если Fcp меньше Flim, или равно Fp+Flim, если Fcp больше Flim.
Устройство 1 взаимосвязи усилий дополнительно содержит подсоединенный параллельно к клеммам сатуратора 41 компаратор 11', выполненный с возможностью получения разности между выходным сигналом сатуратора 41 и усилием Fcp пилотирования на его входе. Эта разность равна нулю, если усилие Fcp пилотирования ниже Flim. Эта разность подается на пороговый компаратор 36 для генерирования сигнала разъединения, способного вызывать срабатывание индикатора 37 разъединения и счетчика 38 с целью размыкания выключателя 15 и отсоединения входа усилия Fcp пилотирования после истечения заранее установленного времени отсоединения.
Изобретение относится также к органу пилотирования, такому как мини-рукоятка 20, показанная на фиг. 1, в котором компьютер объединяет функции вычислительного устройства 25 и устройства 1 взаимосвязи усилий в соответствии с изобретением. Этот компьютер выполнен с возможностью вычисления из сигнала Эр положения от датчика 22 положения величины теоретического усилия управления, например, из справочных таблиц усилия управления, как функции положения, скорости и/или ускорения ручки управления этого органа.
Этот компьютер выполнен также с возможностью формирования величины усилия Fcor_p обратной связи из величины усилия пилотирования, подаваемой датчиком 24 крутящего момента, и величины усилия пилотирования, подаваемой соответствующим органом пилотирования, вычисления величины погрешности усилия из величины усилия управления, вычисленной в блоке 26 управления, и величины усилия Fcor_p обратной связи, а также вывода из них коррекции ΔF усилия, пригодной для подачи на электромотор 23.
Согласно изобретению этот компьютер дополнительно содержит устройство взаимосвязи усилий, содержащее описанное выше устройство для коррекции величины усилия обратной связи.
Само собой разумеется, что описание дано исключительно в качестве примера, и в пределах объема защиты изобретения специалист в данной области может выполнить многочисленные модификации, например, использовать больше двух органов пилотирования или применить принципы изобретения к органам пилотирования, имеющим одну или несколько степеней свободы.
Реферат
Изобретение относится к устройству для взаимосвязи усилий между двумя органами пилотирования с обратной связью по усилию, к органу пилотирования и к воздушному судну. Каждый орган пилотирования содержит ручку управления (21, 31), датчик усилия (24, 34), выполненный с возможностью предоставления величины усилия (Fp, Fcp) пилотирования, оказываемого пилотом, и устройство коррекции. Устройство коррекции содержит компаратор (11), блок коррекции с зоной нечувствительности (12) и сумматор (14) для формирования величины усилия обратной связи. 3 н. и 9 з.п. ф-лы, 4 ил.
Комментарии