Ручное устройство для зубоврачебного или хирургического использования - RU2361540C2
Код документа: RU2361540C2
Чертежи











Описание
Область техники, к которой относится изобретение
Данное изобретение относится к ручному устройству для зубоврачебного или хирургического использования, содержащему полый вал, который выполнен с возможностью вращения вокруг продольной оси и установлен с помощью подшипников в неподвижном трубчатом кожухе; зажим, установленный в переднем конце полого вала и имеющий центральный канал, предусмотренный для размещения хвостовика съемного инструмента, при этом зажим имеет осевые плечи, расположенные вокруг указанной оси, каждое из которых снабжено зажимными кулачками в центральном канале, и каждое плечо прикреплено к кольцевой части зажима; затяжной механизм, опирающийся на полый вал и расположенный с возможностью приложения центростремительной силы к опорной поверхности каждого плеча зажима для зажимания хвостовика инструмента между зажимными кулачками зажима; и освобождающий механизм, опирающийся, по меньшей мере, частично на неподвижный кожух и расположенный с возможностью воздействия на затяжной механизм для, по меньшей мере, ослабления зажима.
В случае ручных устройств этого типа зажимные кулачки обычно расположены на конце зажима, который имеет конические наружные опорные поверхности, с которыми соприкасается внутренний конус трубчатой детали для затягивания тем самым конца зажима на хвостовике. Например, в соответствии с патентной заявкой FR 2 191 869, соответствующей патенту US 3 902 248, зажим установлен с возможностью скольжения в полом валу, при этом его зажимные кулачки и его наружные опорные поверхности расположены на его переднем конце для взаимодействия с передним отверстием вала, и зажим удерживается плотно пружиной, которая тянет в осевом направлении назад.
В случае, когда инструмент, удерживаемый ручным устройством, должен выдерживать относительно высокие нагрузки, в частности, относительно крутящего момента и осевых нагрузок, захват зажима должен быть достаточно плотным. Это требует достаточно высокой осевой силы затяжной пружины, а также больших сил трения на конических поверхностях, которые преобразуют эту осевую силу в радиальные зажимные силы. Освобождающий механизм должен быть способен преодолевать эти силы посредством приложения достаточного осевого давления на скользящий элемент, нагруженный затяжной пружиной. Затем это осевое давление передается на структуру ручного устройства, по меньшей мере, через один из подшипников, на который опирается вращаемый вал. Большую часть времени, как в конструкции, согласно патенту FR 2 191 869, это давление действует в переднем направлении и тем самым нагружает подшипники в противоположном направлении по отношению к осевым нагрузкам, которые действуют на инструмент. То есть подшипники должны быть выполнены с возможностью выдерживания осевых нагрузок в обоих направлениях.
Кроме того, относительно сильная затяжная пружина имеет относительно большой вес и тем самым создает особые недостатки детали, которая вращается очень быстро и центровку которой обычно нельзя обеспечить с большой точностью. Вызываемые этим вибрации увеличиваются с увеличением веса пружины.
В патентной заявке FR 2 723 306, соответствующей патенту US 5 688 122, описано устройство для захвата зубоврачебного инструмента в головке углового ручного устройства, содержащее зажим с упругими плечами, образованными вырезами в шайбе, служащей также в качестве направляющей трубы для хвостовика инструмента. В положении покоя захватные кулачки, расположенные на плечах зажима, находятся на расстоянии от оси, которое меньше радиуса хвостовика инструмента, так что он затем зажимается за счет упругости плеч. Это устройство не нуждается в осевой затяжной пружине, однако центробежная сила стремится разжать зажим.
Сущность изобретения
Данное изобретение имеет целью устранение указанных выше недостатков уровня техники на основе системы, которая обеспечивает сильный захват на уровне зажимных кулачков зажима при одновременном ограничении осевых сил, влияющих на затяжной и освобождающий механизмы. Дополнительной целью изобретения является упрощение конструкции системы подшипников ручного устройства, в частности, посредством уменьшения осевых нагрузок, по меньшей мере, на один из них.
На этой основе создано ручное устройство указанного в вводной части типа, которое характеризуется тем, что каждое плечо зажима содержит рычаг, первый конец которого прикреплен к кольцевой части с помощью соединения и опорная поверхность которого находится в осевом направлении на расстоянии от этого соединения, при этом зажимной кулачок расположен в осевом направлении ближе к соединению, чем опорная поверхность.
Таким образом, за счет действия рычага зажимная сила каждого зажимного кулачка более чем удваивает центростремительную силу, прикладываемую к опорной поверхности затягивающим механизмом, и на практике рычажное отношение плеч можно легко увеличить до десяти или более, поскольку движение затягивания на рычаге зажимных кулачков может быть очень небольшим.
Затягивающий механизм может иметь ползун, который установлен в полом валу и снабжен вогнутой конической поверхностью в зоне зажима и предварительно нагружен в осевом направлении пружиной, которая прижимает его коническую поверхность к опорным поверхностям для удерживания зажима затянутым. Если наклон опорных поверхностей относительно оси является небольшим, то действие силы пружины на каждый рычаг зажима дополнительно многократно увеличивается.
Однако, согласно предпочтительному варианту выполнения, затягивающий механизм имеет скользящую втулку, установленную вокруг полого вала, и имеет для каждого рычага зажима передающий механизм, расположенный в радиальном отверстии полого вала между опорной поверхностью рычага и внутренней кулачковой поверхностью скользящей втулки, при этом кулачковая поверхность имеет наклонную в осевом направлении поверхность, такую как коническая поверхность. Эта скользящая втулка может быть предварительно нагружена в направлении зажимания относительно слабой пружиной. В особенно предпочтительном варианте выполнения в кулачковой поверхности может быть предусмотрена выемка, образующая паз, который удерживает скользящую втулку на месте за счет упругости рычагов зажима, и это позволяет отказаться от обычной затягивающей пружины. Следовательно, освобождающий механизм больше не должен преодолевать осевое давление, создаваемое пружиной.
Другие признаки и преимущества данного изобретения следуют из приведенного ниже описания различных вариантов выполнения, не имеющих ограничительного характера, со ссылками на прилагаемые чертежи.
Краткое описание чертежей
На чертежах изображено:
фиг.1 - ручное устройство, согласно изобретению, в изометрической проекции;
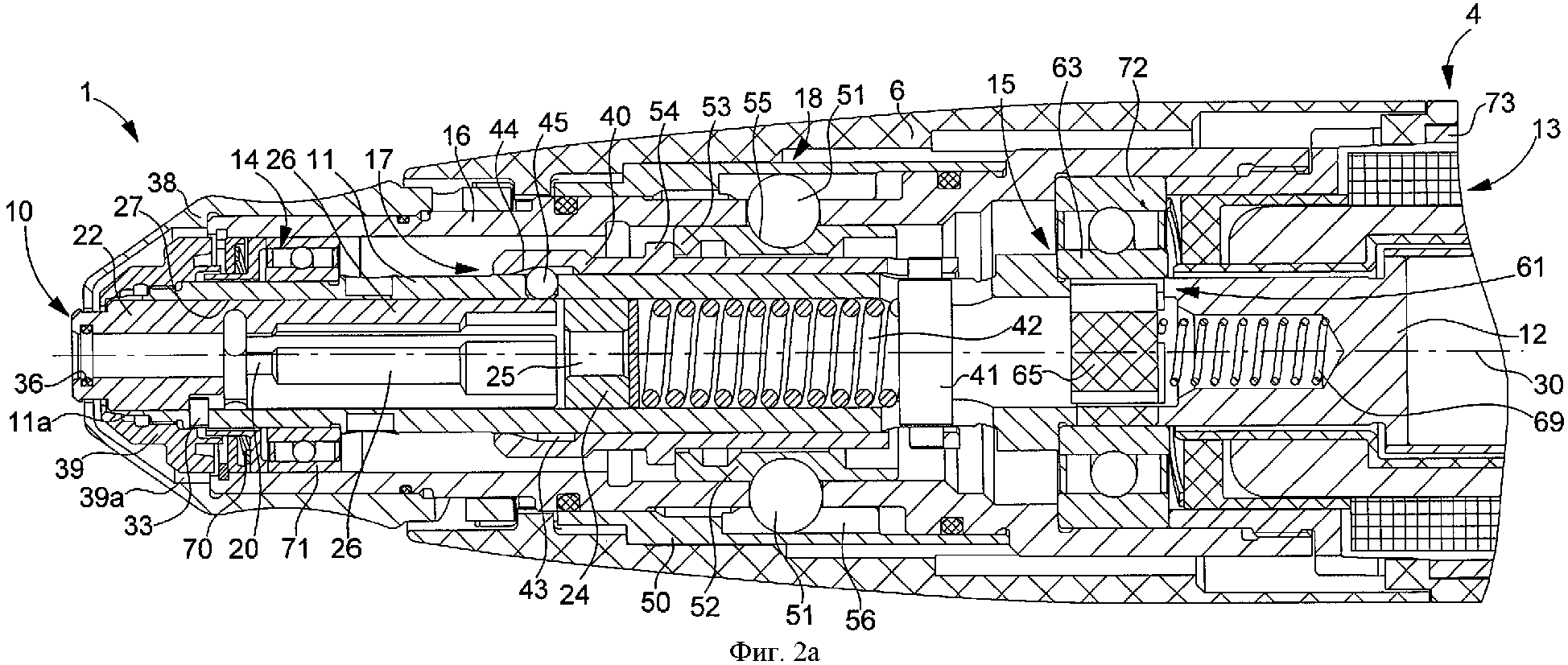
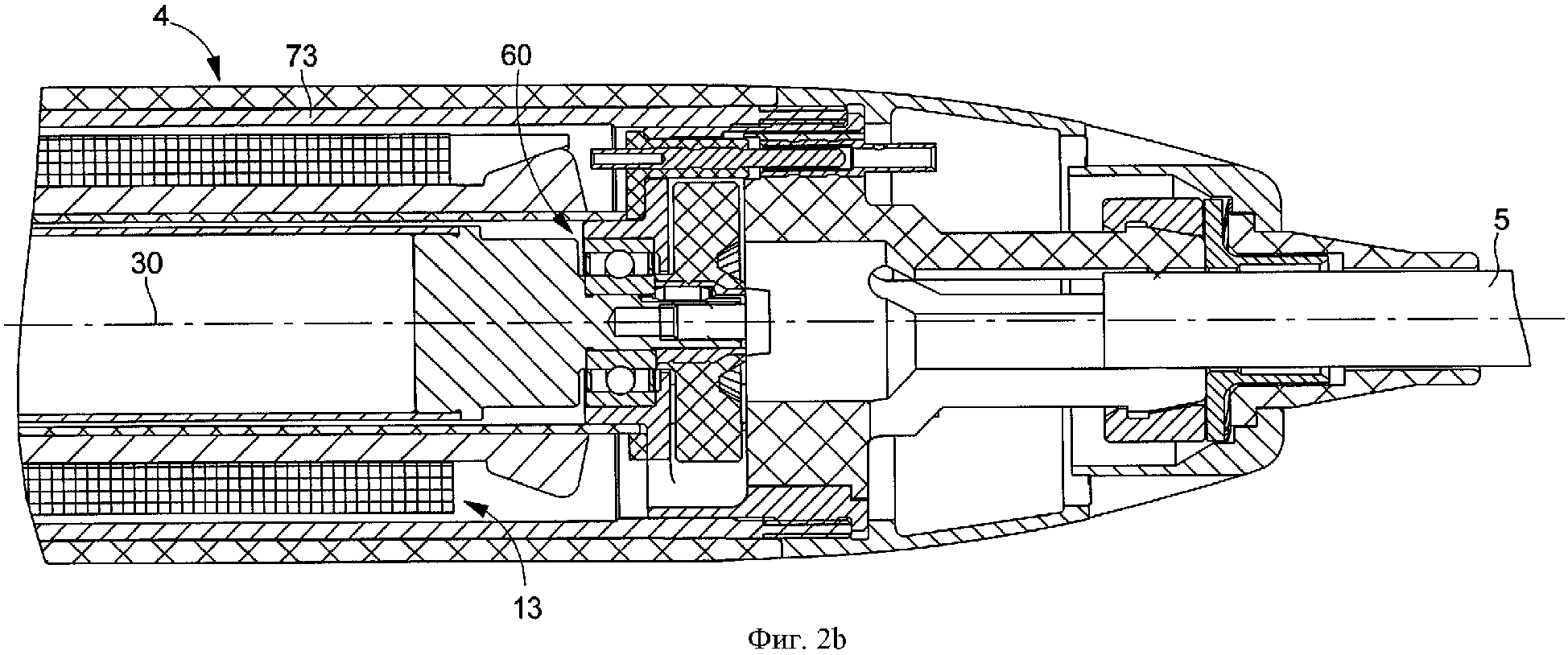
фиг.2, состоящая из фиг.2а и 2b - продольный разрез первого варианта выполнения ручного устройства, согласно фиг.1, содержащего затягивающий механизм шарикового типа;
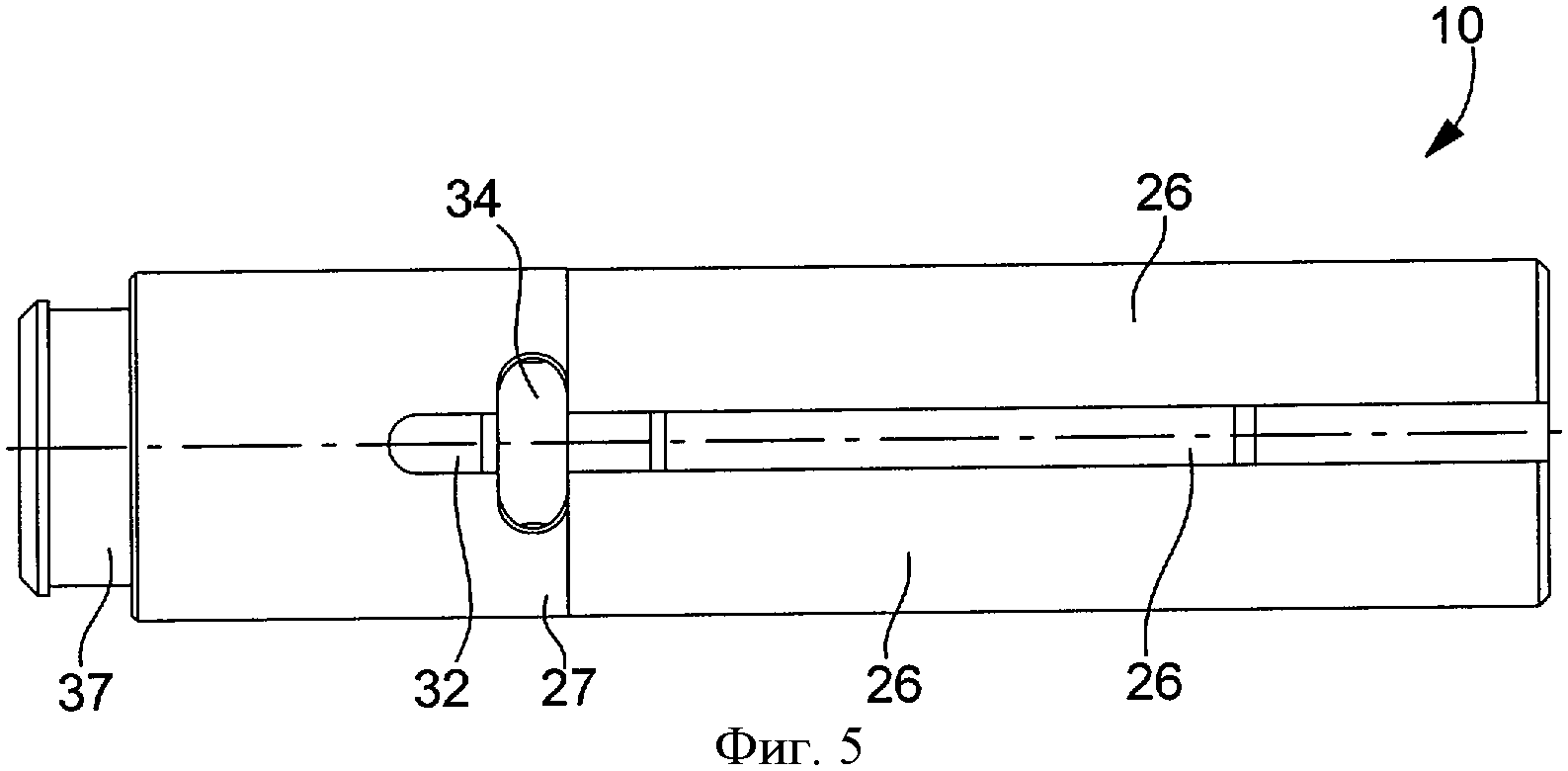
фиг.3 - 5 - зажим согласно фиг.2, соответственно в изометрической проекции, в продольном разрезе и на виде сверху;
фиг.6 - управляющее устройство для зажимания зажима, в изометрической проекции;
фиг.7 - сцепление между двумя валами ручного устройства;
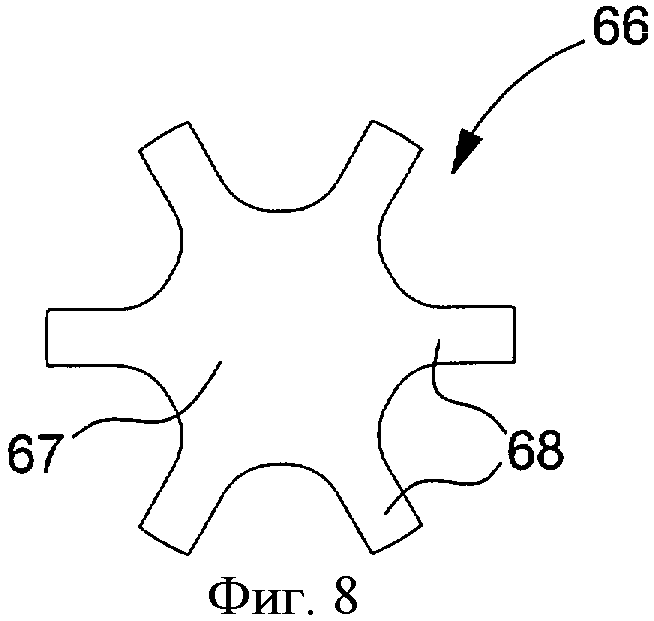
фиг.8 - промежуточная часть сцепления;
фиг.9 - продольный разрез второго варианта выполнения, являющегося результатом модификации затягивающего механизма, показанного на фиг.2, в увеличенном масштабе;
фиг.10 - частичный продольный разрез третьего варианта выполнения ручного устройства, согласно фиг.1, содержащий зажим, соединенный с затягивающим механизмом конусного типа;
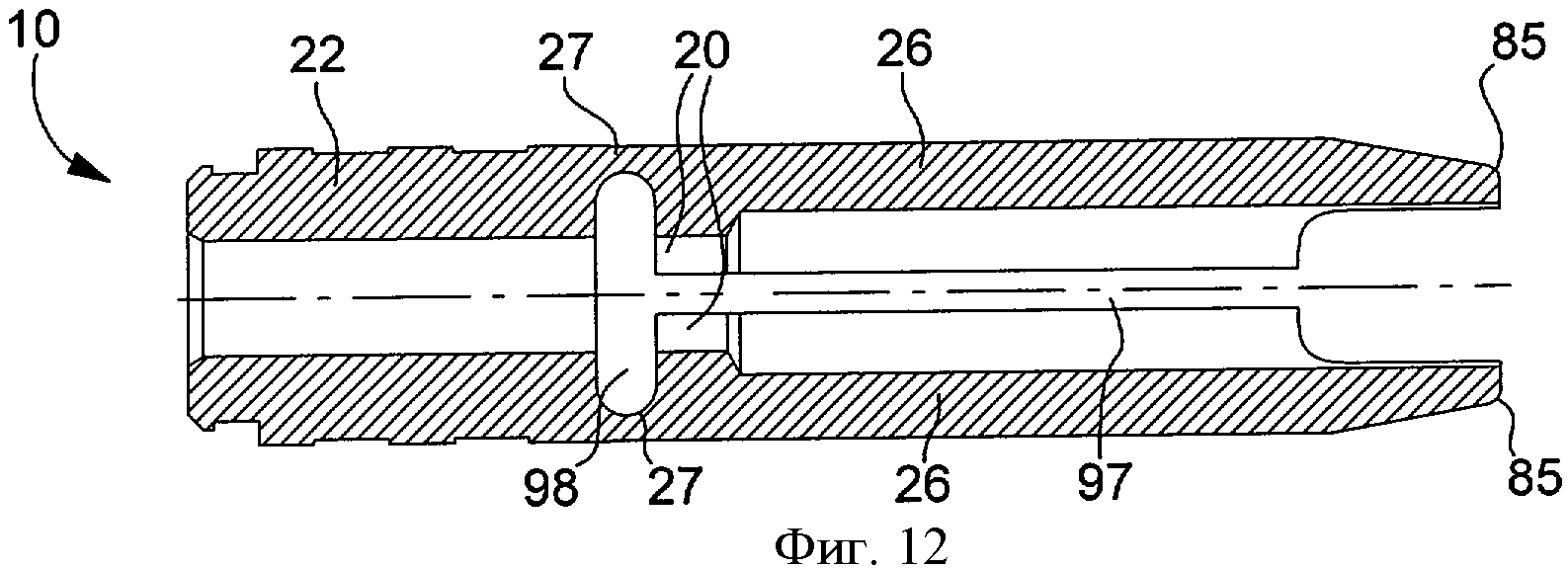
фиг.11 и 12 - зажим, показанный на фиг.10, соответственно, в изометрической проекции и в продольном разрезе;
фиг.13 и 14 - вариант выполнения зажима, показанного на фиг.10, соответственно, в изометрической проекции и в продольном разрезе;
фиг.15 и 16 - втулка, которую можно комбинировать с зажимом ручного устройства, соответственно, в изометрической проекции и в продольном разрезе.
Подробное описание предпочтительных вариантов выполнения
На фиг.1 показано ручное устройство 1 для зубоврачебного или хирургического использования, в котором возможны различные варианты выполнения изобретения, описание которых будет приведено ниже. Ручное устройство снабжено съемным вращающимся инструментом 2 с цилиндрическим хвостовиком 3, который зажат во вращающемся зажиме ручного устройства 1. Оно содержит двигатель, например электрический двигатель, для приведения инструмента 2 во вращение с высокой скоростью. Электродвигатель расположен в главном корпусе 4 ручного устройства, снабжается электрической энергией и управляется с внешнего блока через электрический кабель 5, соединенный с задней частью ручного устройства. Оператор управляет затягиванием и освобождением зажима посредством поворота втулки 6, установленной с возможностью поворота на корпусе 4, в одном или другом направлении. Позициями 7 и 8 обозначены вентиляционные отверстия. Такой инструмент находит использование, в частности, в зубоврачебной практике, стоматологических лабораториях и в микрохирургии. В показанных здесь примерах ручное устройство является инструментом для стоматологической лаборатории с использованием инструментов, имеющих хвостовик диаметром 2,35 мм.
Ниже приводится описание первого варианта выполнения зажима 10 для зажимания инструмента и затягивающего и освобождающего механизмов со ссылками на фиг.2-5. Зажим 10 расположен в переднем конце ручного устройства внутри полого вращаемого вала 11, соединенного с валом 12 электродвигателя 13. Вал 11 опирается на шариковые подшипники 14 и 15 в кожухе 16, прикрепленном к корпусу 4 ручного устройства, и, таким образом, может вращаться со скоростями порядка до 50000 об/мин в показанном устройстве. Однако захватный зажим, такой как зажим 10, можно использовать также в инструментах, в которых инструмент может вращаться со скоростью в несколько сотен тысяч оборотов в минуту, в частности, с помощью приводной воздушной турбины.
Механизм 17 для затягивания зажима 10 установлен на валу 11 и вращается вместе с ним. Механизм 18 для освобождения зажима, который управляется посредством поворота втулки 7, установлен на невращающемся кожухе 16 и может воздействовать на затяжной механизм 17 с целью освобождения инструмента, когда вращение остановлено. Описание этих механизмов будет приведено ниже.
На фиг.3 и 5 показан, в частности, первый вариант выполнения зажима 10, который в этом случае имеет три зажимных кулачка 20, равномерно распределенных вокруг центрального канала 19 зажима для размещения хвостовика 3 инструмента. Каждый зажимной кулачок 20 имеет часть 21 с цилиндрической поверхностью, предназначенную для контакта с хвостовиком инструмента.
Спереди зажим 10 имеет, по существу, цилиндрическую входную трубу 22, снабженную осевым отверстием 23, калиброванным с высокой точностью для возможно точной центровки инструмента. Как показано на фиг.2, задняя направляющая труба 24 зафиксирована в валу 11 сзади зажима 10 и имеет центральное отверстие 25, предназначенное для направления конца хвостовика инструмента.
Каждый зажимной кулачок 20 образует интегральную часть соответствующего рычага 26, который проходит в осевом направлении к задней части трубы 22, к которой он прикреплен с помощью гибкой части 27, образующей соединение, вокруг которого может поворачиваться рычаг 26 в направлении оси 30 вращения вала. На каждом рычаге 26 расположен зажимной кулачок 20 ближе к упругой части 27, чем к свободному концу 28 рычага, так что радиальная сила, приложенная к рычагу вблизи его конца 28, создает очень большую зажимную силу на рычаге зажимного кулачка 20.
Показанный на чертежах зажим предпочтительно выполнен из одного куска металла, например стали. Рычаги 26 отделены друг от друга осевыми прорезями 31, каждая из которых продолжается через паз 32 в заднюю часть трубы 22. Штифт 33, который удерживает с возможностью вращения зажим 10 и полый вал 11, входит в каждый паз 32. Поперечные прорези 34 уменьшают толщину рычагов 26 у их основания и тем самым задают упругие части 27 в трех периферийных зонах поперечного сечения зажима. Впереди входной трубы 22 предусмотрена внутренняя кольцевая канавка 35 для кольца 36 круглого сечения и наружная кольцевая канавка 37 для выступов фиксированной крышки 38 и винта 39, ввинченного в вал 11 для осевого удерживания зажима 10. Винт 39 снабжен вентиляционными ребрами 39а, предназначенными для создания небольшого воздушного давления под крышкой 38 с целью предотвращения прохождения загрязнений через щель между крышкой и трубой 22. Дополнительно к этому винт 39 прижимает в радиальном направлении конец 11а полого вала 11 к трубе 22, при этом этот конец является тонким и разделен на упругие лепестки с помощью осевых прорезей. Это обеспечивает центровку зажима 10 без зазора в полом валу.
В варианте выполнения, не показанном здесь, входная труба 22 может быть отдельной деталью, которая не образует часть зажима 10. Торец указанного зажима в этом случае образует короткая кольцевая часть, к которой с помощью соединения прикреплены рычаги 26. Эта кольцевая часть может быть, при необходимости, отдельной от рычагов деталью, но обычно предпочтительной является состоящая из одной детали конструкция.
Затяжной механизм 17 имеет втулку 40, которая установлена с возможностью скольжения вокруг полого вала 11, на котором она удерживается с возможностью вращения с помощью поперечины 41, входящей в продольные прорези вала 11 и втулки 40. Пружина 42 сжатия, опирающаяся на заднюю направляющую трубу 24, толкает поперечину 41 в осевом направлении назад. Передний конец втулки 40 имеет внутреннюю канавку 43, образованную спереди конической поверхностью 44. Три шарика 45 установлены в соответствующих отверстиях полого вала 11 и имеют диаметр, соответствующий расстоянию между внутренней поверхностью вала 11 и основанием канавки 43 втулки 40. Каждый шарик 45 опирается на наружную поверхность одного из рычагов 26 зажима 10 вблизи конца 28 рычага.
Когда втулка 40 освобождается освобождающим механизмом 18, то она стремится скользить назад под действием осевого давления пружины 42, так что ее коническая поверхность 44 толкает конец каждого рычага 26 радиально внутрь с помощью соответствующего шарика 45. В результате поворота рычага на упругой части 27 эта сила передается с многократным усилением на зажимной кулачок 20 рычага и, таким образом, очень плотно и постоянно зажимает хвостовик инструмента во время работы. Для специалистов в данной области техники известно, что рычаги 26 зажима в таком затягивающем механизме могут быть жесткими или слегка гибкими. Если они являются жесткими, то радиальные перемещения их концов являются просто слишком короткими, и то же относится к осевому перемещению втулки 40. В обоих случаях постоянно сохраняется большая зажимная сила на рычаге зажимного кулачка, даже если сила пружины 42 является сравнительно небольшой, как результат действия рычага зажима, а также как результат небольшого наклона конической поверхности 44 относительно оси 30. Легкий наклон также означает, что центробежная сила, действующая на рычаг 26, не способна преодолеть действие пружины 42. Следует дополнительно отметить, что передача усилий через шарики 45 осуществляется с очень небольшим трением, и это также способствует сохранению заданной зажимной силы. Однако эти шарики не являются обязательными и могут быть заменены любыми передаточными элементами, проходящими через вал 11 и воздействующими на рычаги 26.
Освобождающий механизм 18 выполнен с возможностью толкания втулки 40 вперед против силы пружины 42, когда пользователь поворачивает втулку 6 на корпусе 4 в соответствующем направлении. Он содержит втулку 50, соединенную с возможностью вращения с управляющей втулкой 6, один или более шариков 51, в данном случае два шарика, расположенных симметрично относительно оси 30 ручного устройства, и упорный буртик 52, установленный с возможностью скольжения в кожухе 16 и имеющий на переднем конце внутренний выступ 53 для осевой опоры на наружный фланец 54 втулки 40, когда последняя не вращается. Шарики 51 входят в наружную кольцевую канавку 55 буртика 52. Дополнительно к этому каждый шарик 51 входит в соответствующую осевую канавку 56 втулки 50 и в наклонную прорезь 57 (смотри фиг.6) кожуха 16. Путь прохождения каждой прорези 57 является, по существу, спиральным для задания определенного осевого перемещения шарика 51, и ее концы могут быть слегка отогнутыми для лучшего задания места остановки шарика. В предпочтительном варианте выполнения, показанном на фиг.6, задний конец каждой прорези 57, соответствующий отведенному назад положению буртика 52 и тем самым состоянию затягивания зажима 10, снабжен упругой лапкой 58, конец которой имеет выступ, который удерживает шарик 51 посредством сцепления с концом прорези 57. Это обеспечивает управление поворотом втулки 6, упругоудерживаемой для предотвращения ненамеренного срабатывания, и показывает пользователю, что она покидает нормальное рабочее положение зажима. Следует отметить, что упругая лапка изготавливается посредством простого фрезерования дополнительной прорези 59 в кожухе 16.
Примечательным признаком ручного устройства, показанного, в частности, на фиг.2, является то, что вращающаяся часть опирается только на три подшипниковые системы, т.е. на передний шарикоподшипник 14, центральный шарикоподшипник 15 и задний шарикоподшипник 60, при этом оба из двух коаксиальных валов 11 и 12 опираются на центральный подшипник 15, внутри которого они соединены друг с другом с возможностью вращения с помощью сцепления 61 с геометрическим замыканием, показанным, в частности, на фиг.2, 7 и 8. Задний конец полого вала 11 имеет выступ 62, который упирается во внутреннее кольцо 63 подшипника 15. Он дополнительно имеет ряд зубцов 64, входящих в кольцо 63, в данном случае три зубца, распределенных с угловым расстоянием 120° друг от друга по окружности. Передний конец вала 12 электродвигателя входит во внутреннее кольцо 63 подшипника 15, предпочтительно с возможностью скольжения для обеспечения выполнения небольших осевых перемещений, которые могут вызываться тепловым расширением, осевым зазором подшипников и другими допусками. Этот конец вала 12 также имеет зубцы 65, проходящие в осевом направлении между зубцами 64 другого вала для обеспечения передачи крутящего момента в обоих направлениях между двумя валами. Промежуточная деталь 66, предпочтительно изготовленная из синтетического материала, имеет центральный цилиндрический корпус 67 и радиальные ребра 68, которые расположены между смежными зубцами 64 и 65 и служат в качестве амортизаторов. Кроме того, промежуточная деталь 66 предварительно напряжена в осевом направлении к полому валу 11 с помощью пружины 69 сжатия, расположенной в валу 12, описание действия которой будет приведено ниже.
Передний подшипник 14 предварительно нагружен с помощью мембранной пружины 70, которая толкает наружное кольцо 72 подшипника, которое может скользить в кожухе 16 в направлении назад. Предварительное осевое напряжение передается через подшипник 14 и вал 11 до зоны центрального подшипника 15, где оно частично распределяется по промежуточной детали 66 и валу 12 электродвигателя в степени, равной осевому давлению пружины 69, а остаток распределяется в центральном подшипнике 15 в виде предварительного напряжения, которое возвращается в кожух 16 через наружное кольцо 72 подшипника. Осевая сила, с которой пружина 69 воздействует на вал 12, явно образует осевое предварительное напряжение заднего подшипника 60. В результате осевого зазора сцепления 61 между двумя валами это напряжение не изменяется, когда пользователь оказывает осевое давление на инструмент, поскольку давление полностью поглощается центральным подшипником 15, наружное кольцо которого опирается на конец трубчатого элемента 73 корпуса 4, ввинченного в задний конец кожуха 16.
Указанная выше конструкция имеет те же преимущества, что и классическая конструкция с четырьмя подшипниками относительно поглощения осевых нагрузок, однако она заметно короче и поэтому позволяет значительно сократить полную длину ручного устройства. Это уменьшение длины имеет большое преимущество увеличения точности манипулирования оператором, в частности, посредством уменьшения воздействия нагрузок, оказываемых кабелем 5 на заднюю часть устройства.
Другое частное преимущество заключается в том, что когда смежные концы двух валов 11 и 12 опираются и центрируются одним и тем же кольцом 62, то их концентричность обеспечивается без каких-либо дополнительных средств.
На фиг.9 показан второй вариант выполнения затяжного механизма 17, который обеспечивает заметные упрощения по сравнению с первым вариантом выполнения. Механизм 17 отличается от описанного выше механизм в основном расположением, показанным на фиг.9, и отказом от центральной пружины 42, показанной на фиг.2. Таким образом, освобождающий механизм 18 действует в качестве управляющего средства для затягивания и освобождения.
Как показано на фиг.9, передний конец втулки 40 модифицирован посредством простого добавления кольцевой канавки 80 с круговым арочным профилем, при этом эта канавка отделена от конической поверхности 44 коротким отрезком цилиндрической поверхности, которая образует радиальный выступ 81 относительно смежных поверхностей. В этом случае каждый рычаг 26 зажима 10 предпочтительно является слегка гибким, что позволяет работать затяжному механизму 17 следующим образом.
На фиг.9 показано положение освобождения, в котором каждый шарик 45 может проходить вниз на дно канавки 43, так что каждый рычаг 26 зажима 10 может раздвигаться, пока он не упрется во внутреннюю поверхность полого вала 11. Затем раздвигаются зажимные кулачки 20 зажима 10 на максимальное расстояние, и можно вводить или удалять хвостовик 3 инструмента.
Затем для затягивания зажима 10 втулка 40 отводится назад посредством поворота управляющей втулки 6, как и в предыдущем варианте выполнения, однако осевое перемещение втулки 40 больше, поскольку оно выполняется, пока канавка 80 не будет находиться на шариках 45. Сначала перемещение конической поверхности 44 на шариках 45 толкает рычаги 26 в направлении центра и приводит к их изгибанию, когда зажимные кулачки зажима встречают адекватное сопротивление со стороны хвостовика инструмента. В результате этого изгибания цилиндрический выступ 81 может проходить над шариками, и затем канавка 80 входит в зацепление с шариками и удерживает скользящую втулку 40 на месте лишь на основе силы воздействия рычагов 26 на шарики 45.
Освобождение осуществляется, по существу, тем же путем, что и в первом варианте выполнения, посредством поворота управляющей втулки 6 (смотри фиг.6), что приводит к перемещению буртика 53 и втулки в положение, показанное на фиг.9.
Возможность отказа от центральной пружины 42, показанной на фиг.2, обеспечивает довольно значительные преимущества Во-первых, улучшается балансировка вращающихся частей, поскольку такую пружину никогда нельзя идеально отцентрировать в отверстии, в котором она находится. Увеличение веса также способствует этому. Во-вторых, устранение пружины обеспечивает уменьшение осевых сил, оказываемых освобождающим механизмом 18 в переднем направлении на скользящую втулку 40 и, следовательно, на полый вал 11. Эти силы должны затем проходить в подшипник, поддерживающий этот вал, в частности в передний подшипник 14, который является как можно меньшим и не должен подвергаться воздействию слишком большой осевой силы. С помощью расположения, показанного на фиг.9, максимальная осевая сила, оказываемая на вал 11 во время освобождения, является силой, необходимой для обеспечения выхода шариков 45 из канавки 80. Ее величину можно легко задавать посредством задания профиля этой канавки.
Как показано на фиг.9, фланец 82 или ряд эквивалентных приливов предусмотрен на внутренней кромке цилиндрического отверстия 78, содержащего шарик 45, с целью его удерживания, когда отводится зажим 10. Поскольку фланец выполнять не просто, то его можно заменить легким выступом задней трубки 24 в выход отверстия 78, слегка укорачивая рычаги 26 зажима.
Следует отметить, что указанный выше затяжной механизм 17 в варианте выполнения, согласно фиг.2 или согласно фиг.9, действует только на периферийные поверхности зажима 10, но не на поверхности или кромки его конца. Это делает возможным различные конфигурации зажима рычажного типа в соответствии с описанными здесь принципами.
Если обратиться к фиг.2, то один из этих вариантов состоит в отводе назад (вправо на чертеже) задней направляющей трубы 24 и включения ее в зажим 10, при этом два конца рычагов 26 прикрепляются к передней трубе 22 и задней трубе 24, соответственно, при этом рычаги дополнительно являются достаточно тонкими для радиального изгибания между трубами под действием шариков 45. Это будет действовать на опорные поверхности, расположенные, по существу, в середине длины рычагов. Таким образом, зажимные кулачки 20 будут расположены ближе к передней трубе 22 и ближе к задней трубе 24, обеспечивая тем самым удерживание хвостовика инструмента без зазора в двух разнесенных в пространстве точках.
Другой вариант в том же направлении может состоять в установке двух зажимов, подобных зажиму 10, в валу 11, расположенных один за другим и имеющих рычаги, которые являются более узкими и разнесенными так, что они могут быть расположены между рычагами зажима без соприкосновения с ними. Зажимные кулачки одного из зажимов будут расположены спереди, в то время как кулачки другого зажима будут сзади, обеспечивая тем самым удерживание без зазора хвостовика инструмента в двух расположенных на расстоянии друг от друга в осевом направлении точках. Зажимной механизм будет иметь два комплекта шариков 45 и две канавки 43, сдвинутые в скользящей втулке 40 в осевом направлении для воздействия на соответствующие зажимы.
На фиг.10-12 показан третий вариант выполнения ручного устройства, согласно фиг.1. Отличие от первого варианта выполнения заключается, по существу, в конструкции зажима и затяжного механизма, и поэтому ниже приводится описание этих отличий с использованием тех же цифровых позиций для одинаковых частей.
В этом случае зажим 10 имеет два диаметрально противоположных рычага 26, имеющих свободные концы 84 сзади, которые сужаются в боковом направлении и каждый из которых имеет наружную округленную часть, действующую в качестве опорной поверхности 85 для вогнутой конической поверхности 86 плунжера 87, установленного в полом валу 11. Этот плунжер постоянно толкается вперед пружиной 88 сжатия, опирающейся на шайбу 89, зафиксированную в валу 11 шариками 90 и заглушкой 91. Плунжер 87 имеет центральное направляющее отверстие 92 для приема и направления хвостовика инструмента, который упирается в осевом направлении в стержень 93, закрепленный на заглушке 91. Этот стержень дополнительно удерживает поперечину 94 на плунжере для обеспечения толкания плунжера назад для разжимания зажима 10 с помощью освобождающего механизма 18. Для этого втулка 40 имеет спереди внутренний выступ 96, который выполнен с возможностью опоры на поперечину 94, когда втулка 40 отводится назад посредством поворота управляющей втулки 6. В остальном освобождающий механизм 18 может быть таким же, как описано выше.
Как показано, в частности, на фиг.11 и 12, зажим 10 с двумя кулачками, описанными выше, может быть выполнен в виде единой детали и иметь кольцевую часть, действующую на переднюю направляющую втулку 22 и рычаги 26, снабженные зажимными кулачками 20. Для этого необходимы лишь две прямолинейные продольные прорези 97, которые имеют постоянную ширину, для разделения двух рычагов 26, и единственная поперечная прорезь 98 для задания двух упругих частей, образующих сочленения 27 рычагов на периферии зажима.
На фиг.13 и 14 показан зажим, аналогичный показанному на фиг.10-12 зажиму, но имеющий три рычага 26 вместо двух. Эти рычаги разделены продольными прорезями 97, разнесенными на 120 градусов друг от друга. Это показывает, что зажим, используемый в ручном устройстве, согласно изобретению, может иметь любое число рычагов и захватных кулачков, превышающее два.
За счет очень большой зажимной силы, которую могут создавать описанные выше зажимы рычажного типа, при некоторых условиях имеется опасность повреждения хвостовика инструмента зажимными кулачками 20 или, по меньшей мере, оставления оттисков на нем. Эту опасность можно устранить посредством расположения между зажимными кулачками 20 и хвостовиком инструмента дополнительной втулки 100, пример выполнения которой показан на фиг.15 и 16. Она представляет цилиндрическую трубчатую деталь, предпочтительно выполненную из отпущенной нержавеющей стали, которая может быть снабжена пазами, например, по всей длине, так что она может эластично сжиматься под дейстрием затягивания зажимных кулачков. В предпочтительном варианте выполнения втулка 100 имеет три продольных прорези 102, которые задают три упругих плеча 103, направленных назад. Передняя часть 104 втулки является полностью цилиндрической и введена в кольцевую часть 22 зажима 10, так что каждое упругое плечо 103 расположено напротив одного из зажимных кулачков 20, проходя мимо зажимной поверхности зажимного кулачка со всех сторон. Таким образом, упругость плеч 103 предотвращает оставление кромками зажимных кулачков оттисков на хвостовике инструмента. Внутренняя поверхность 106 втулки 100 является цилиндрической и гладкой для прижимания к хвостовику инструмента без оставления меток. После расположения втулки 100 в зажиме 10 предпочтительно подвергнуть ее внутреннюю поверхность чистовой обработке. Затем весь узел можно вводить в центрирующую оправку для чистовой обработки наружной поверхности зажима. Такую дополнительную втулку можно использовать с любым из описанных выше зажимов 10, однако при этом центральный канал зажима должен быть подходящим образом расширен в соответствии с толщиной стенки втулки 100.
Реферат
Изобретение относится к медицинскому инструментарию и может быть использовано в хирургии или в стоматологии. Ручное устройство имеет в передней части зажим. Зажим выполнен с возможностью плотного зажимания хвостовика съемного инструмента. Съемный инструмент расположен в направляющих отверстиях. Зажим имеет два или более рычагов. Рычаги прикреплены к кольцевой части зажима с помощью упругих сочленений. Каждый рычаг имеет зажимной кулачок для хвостовика инструмента. Каждый зажимной кулачок расположен намного ближе к соединению, чем опорная поверхность, на которую затяжной механизм оказывает центростремительную силу так, что рычаг умножает эту силу. Затяжной механизм предпочтительно имеет скользящую втулку. Скользящая втулка имеет коническую внутреннюю поверхность. Коническая внутренняя поверхность создает указанную силу на рычагах зажима с помощью шариков, расположенных в отверстиях полого вращаемого вала. В результате такое расположение позволяет использовать более слабую зажимную пружину или позволяет отказаться от такой пружины. Это позволяет уменьшить некоторые осевые нагрузки на шарикоподшипники. 12 з.п. ф-лы, 16 ил.
Формула
полый вал, который выполнен с возможностью вращения вокруг продольной оси и установлен с помощью подшипников в неподвижном трубчатом кожухе,
зажим, установленный в переднем конце полого вала и имеющий центральный канал, предусмотренный для размещения хвостовика съемного инструмента, при этом зажим имеет осевые плечи, расположенные вокруг продольной оси, каждый из которых снабжен зажимным кулачком в центральном канале, и каждое плечо прикреплено к кольцевой части зажима,
затяжной механизм, опирающийся на полый вал и расположенный с возможностью приложения центростремительной силы к опорной поверхности каждого плеча зажима для зажимания хвостовика инструмента между зажимными кулачками зажима, и
освобождающий механизм, опирающийся, по меньшей мере, частично на неподвижный кожух и расположенный с возможностью воздействия на затяжной механизм для, по меньшей мере, ослабления зажима, отличающееся тем, что каждое плечо зажима содержит рычаг, первый конец которого прикреплен к кольцевой части с помощью гибкой части, образующей соединение, вокруг которого рычаг имеет возможность поворота в направлении оси вращения вала и опорная поверхность которого находится в осевом направлении на расстоянии от этого соединения, при этом зажимной кулачок расположен в осевом направлении ближе к соединению, чем опорная поверхность.
Комментарии