Устройство для дробления стружки на токарных станках с чпу - SU1329916A1
Код документа: SU1329916A1
Чертежи
Описание
плечами, оси рычага 10 и пальца 11 Ползуна. Узел смонтирован на неподвижных плите 7 и планке 8, которые прикреплены к резцовым блокам поворотной части резцедержателя. Для всех узлов подвижных порогов в устройст1 е предусмотрен один общий силовой привод , который смонтирован на неподвижном основании 12 резцедержателя. Он состоит из электродвигателя IS-, приводного вала 14, клиноременнон передачи 15 и эксцентрика 16, расположенного нюке горизонтального плеча рыча1
Изобретение относится к станко- строениЮэ в частности к обработке .металлов р-езанием на токарных стан- как с ЧПУ, имеющих вертикальную ось поворотной части резцедержателя.
Целью изобретения является расширение технологических возможностей путём обеспечения дробления стружки на всех позициях резцедержателя от общего силового привода.
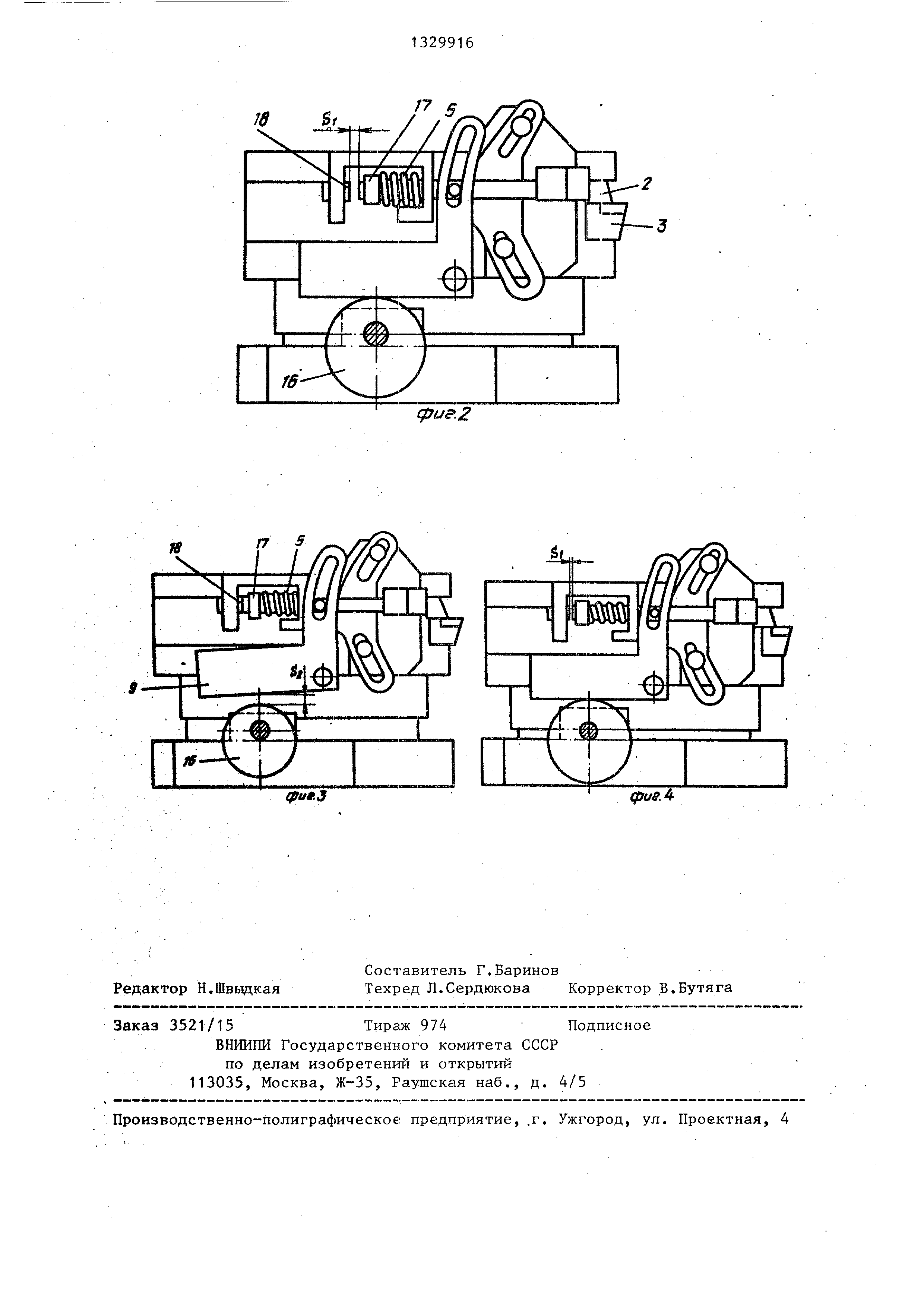
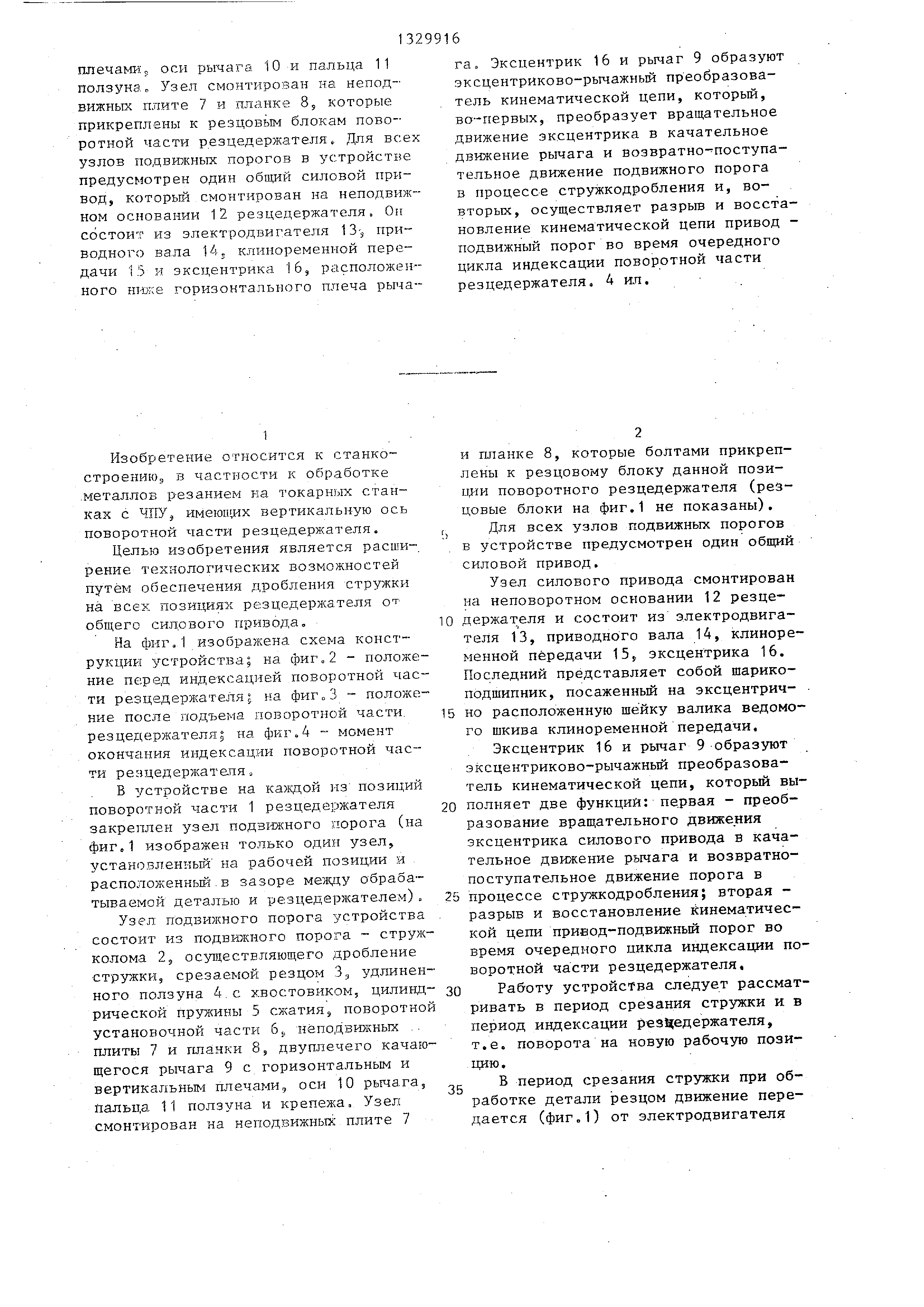
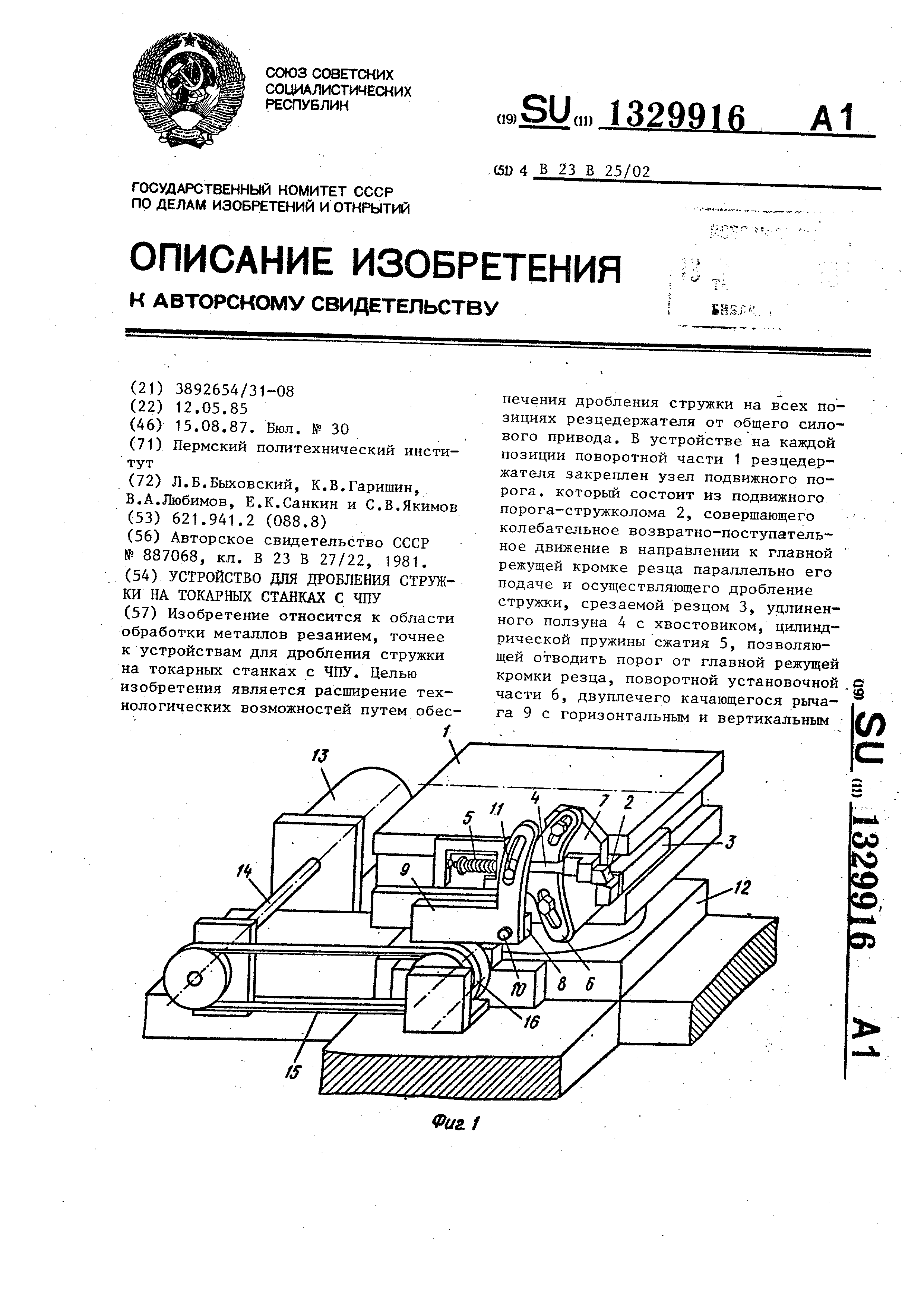
На фиг.1 изображена схема конструкции устройства; на фиг.2 - положение перед индексацией поворотной части резцедержателя; на фиг„3 - положение после подъема поворотной части, резцедержателя; на фиг.4 - момент окончания индексации поворотной части резцедержат&пя..
В устройстве на каждой из позиций поворотной части 1 резцедержателя закреплен узел подвижного порога (на фиг.1 изображен только один узел, установленный на рабочей позиции и расположенньй .в зазоре между обрабатываемой деталью и резцедержателем),
Узел подвижного порога устройства состоит из подвижного порога - струж- колома 2, осулцествляющего дробление стружки, срезаемой резцом .3, удлиненного ползуна 4.с хвостовиком, цилиндрической пружины 5 сжатия, поворотной установочной части 6j, неподвижных .. плиты 7 и планки 8, двуплечего качающегося рычага 9 с горизонтальньм и вертикальным плечами, оси 10 рычага, пальца 11 ползуна и крепежа. Узел смонтирован на неподвижных плите 7
9916
га. Эксцентрик 16 и рычаг 9 образуют эксцентриково-рычажный преобразователь кинематической цепи, которьш, во-первых, преобразует вращательное движение эксцентрика в качательное движение рычага и возвратно-поступательное движение подвижного порога в процессе стружкодробления и, во- вторых, осуществляет разрыв и восстановление кинематической цепи привод - подвижный порог во время очередного цикла индексации поворотной части резцедержателя. 4 ил.
и планке 8, которые болтами прикреплены к резцовому блоку данной пози- пди поворотного резцедержателя (резцовые блоки на фиг.1 не показаны). Для всех узлов подвижных порогов в устройстве предусмотрен один общий силовой привод.
Узел силового привода смонтирован на неповоротном основании 12 резцедержат еля и состоит из электродвигателя 13, приводного вала 14, клиноре- менной передачи 15,, эксцентрика 16. Последний представляет собой шарикоподшипник , посаженный на эксцентрично расположенную шейку валика ведомого шкива клиноременной передачи.
Эксцентрик 16 и рычаг 9 образуют эксцентрнково-рычажный преобразователь кинематической цепи, который выполняет две функций: первая - преобразование вращательного движения эксцентрика силового привода в качательное движение рычага и возвратно- поступательное движение порога в
процессе стружкодробления; вторая - разрыв и восстановление кинематической цепи привод-подвижный порог во время очередного цикла индексации поворотной части резцедержателя,
Раб оту устройства следует рассматривать в период срезания стружки и в период индексации резцедержателя, т.е. поворота на новую рабочую позицию .
В период срезания стружки при обработке детали резцом движение передается (фиг„1) от электродвигателя
3
13 через вал 14, клиноременную передачу 15 и валик ведомого шкива на эксцентрик 16. Вращение эксцентрика преобразуется в качательное движение двуплечего рычага 9 на оси 10, закрепленной в неподвижной планку; 8. Вертикально расположенное плечо рычага 9 имеет дугообразный паз, в который входит палец 11 ползуна 4. Благодаря такой конструкции качательное движение рычага преобразуется в колебательное возвратно-поступательное перемещение ползуна 4 с подвижным порогом 2, осуществляющим дробление срезаемой стружки. Рабочее движение ползуна вместе с порогом вперед к главной режущей кромке резца происходит от силового привода и сопровождается сжатием пружины 5. Отвод ползун с порогом назад в исходное положение происходит под действием пружины 5.
Регулировка порога по конкретному резцу осуществляется с помощью поворотной установочной части 6, имеющей дугообразные по окружности пазы с герметическим центром на вершине резца.
Работа устройства в период индексации поворотной части резцедержателя представлена на фиг.2 - 4.
Перед индексацией (фиг.2), вращение эксцентрика 16 остановлено, подвижной порог 2 частично отведен назад от главной режущей кромки резца 3, но пружина 5 остается в поджатом состоянии. Между концом хвостовика 17 ползуна и регулируемой опорой 18
обеспечивается зазор S, , необходимьй для безударной работы.
При подъеме поворотной части резцедержателя пружина 5 продолжает отвод ползуна с подвижным порогом назад , поворачивая двуплечий рычаг 9 против часовой стрелки. После упора хвостовика 17 в регулируемзпо опору зазор S, между ними ликвидируется и последующий подъем поворотной части резцедержателя не вызывает поворота двуплечего рычгага. При этом происходит отрьш горизонтального плеча от эксцентрика 16, установленного на неповоротном основании резцедержател ля, и образуется зазор S, т.е. происходит разрыв кинематической цепи. Зазор S необходим для безаварийног поворота резцедержателя.
0
После поворота резцедержателя на новую позицию возникает положение, аналогичное изображенному на фиг.З.
В момент окончания индексации (фиг.4) поворотньш резцедержатель на новой позиции вместе с узлом подвижного порога и резцом опустился вниз и встал в рабочее положение. При этом восстанавливается контакт между эксцентриком и горизонтальным плечом рычага , т.е. ликвидируется разрьт кинематической цепи привод-подвижной порог , восстанавливается ее целостность. 5 Индексация закончена и устройство подготовлено к стружкодроблению на новой рабочей позиции. Зазор 5, на
фиг.4 меньще, чем на фиг.2. Это соответствует реальным условиям настрой- 0 ки узлов подвижных порогов на разных позициях.
Описанньи цикл индексации поворотной части резцедержателя осуществляется автоматически от автоматики 5 станка и определяется программой работы резцедержателя.
После индексации включается вращение эксцентрика и подвижный порог начинает совершать колебательное возв- 0 ратно-поступательное движение, необ- ходимое для дробления срезаемой
СТР ЧЖКИ.
Формула изобретения Устройство для дробления стружки
5 на токарных станках с ЧПУ, содержащее основание, поворотньш резцедержатель, установленный на основании, подвижный порог, связанньш с механизмом, обеспечивающим его возвратно-поступатель0 ное перемещение в направлении главной режущей кромки резца параллельно подаче , отличающееся тем, что, с целью расширения технологических возможностей путем обеспечения
5 дробления стружки на всех позициях резцедержателя от общего силового привода, механизм возвратно-поступательного перемещения состоит из рычага с горизонтальным и вертикальным
0 плечами, пружины отвода порога от главной режущей кромки резца, эксцентрика , установленного на основании с возможностью вращения, причем вертикальное плечо рычага кинематически
5 связано с порогом, а горизонтальное нижней Своей плоскостью контактирует с поверхностью эксцентрика.
ю ef
Г 5
дзир.2
Реферат
Изобретение относится к области обработки металлов резанием, точнее к устройствам для дробления стружки на токарных станках с ЧПУ. Целью изобретения является расширение технологических возможностей путем обес/ /J печения дробления стружки на всех позициях резцедержателя от общего силового привода. В устройстве на каждой позиции поворотной части 1 резцедержателя закреплен узел подвижного порога , который состоит из подвижного порога-стружколома 2, совершающего колебательное возвратно-поступательное движение в направлении к главной режущей кромке резца параллельно его подаче и осуществляющего дробление стружки, срезаемой резцом 3, удлиненного ползуна 4 с хвостовиком, цилиндрической пружины сжатия 5, позволяющей отводить порог от главной режущей кромки резца, поворотной установочной части 6, двуплечего качающегося рычага 9 с горизонтальным и вертикальным i (Л
Формула
Комментарии