Способ обеспечения пилотирования летательного аппарата при полете на малой высоте и система для его осуществления - RU2095280C1
Код документа: RU2095280C1
Чертежи




Описание
Изобретение относится к способу и системе для обеспечения пилотирования летательного аппарата, позволяющих, в частности, определить опасные препятствия в зоне полета данного летательного аппарата.
При выполнении полета на малой высоте пилот летательного аппарата, в частности, вертолета, видит перед собой под относительно небольшим углом наклона очень большое количество точек поверхности или препятствий, расположение которых хорошо различимо по направлению, но не всегда различимо по удаленности.
Получение и оценка пилотом визуальной информации обо всех этих препятствиях при выполнении полета на малой высоте и принятие соответствующих решений для управления летательным аппаратом представляет собой трудную и весьма напряженную работу, особенно в условиях плохой видимости и при наличии очень тонких предметов, представляющих опасные препятствия, плохо различаемые на больших расстояниях.
Известно устройство для предупреждения пилотов вертолетов, об опасности столкновения с препятствием при полетах на малой высоте /см. заявку DЕ N 3501954 A1, 1986 г./ Устройство снабжено блоками памяти с данными о препятствиях по маршруту полета, блоком непрерывного сравнения координат мгновенного положения вертолета с координатами препятствия, выдающим в случае опасности столкновения с препятствием предупредительный сигнал пилоту. Известное техническое решение не позволяет выполнять облет препятствий оптимальным образом, на минимальном расстоянии и не обеспечивает автоматизацию процесса.
Эти недостатки особенно усугубляются в тех случаях, когда пилот вынужден использовать приборы ночного видения или телевизионные средства наблюдения, которые дают бесцветное и плоское изображение.
В основу изобретения положена задача устранения указанных недостатков. Данное изобретение касается способа обеспечения пилотирования летательного аппарата, в частности, при выполнении полета на малой высоте, позволяющего выявить опасные препятствия по траектории полета данного летательного аппарата.
С этой целью в соответствии с предлагаемым изобретением способ обеспечения пилотирования
летательного аппарата на малой высоте, позволяющий выявить опасные препятствия на местности в зоне перед данным летательным аппаратом, отличается тем, что:
исходя из возможностей
маневрирования данного летательного аппарата расчитывают условную кривую, связанную с этим летательным аппаратом и с известной теоретически оптимальной траекторией облета препятствия в вертикальной
плоскости;
для пространства, находящегося перед данным летательным аппаратом, выполняют следующие операции:
a/ определяют все препятствия, расположенные в рассматриваемой зоне в
направлении полета;
b/ вершины всех выявленных препятствий сравнивают с упомянутой выше условной кривой;
c/ определяют как опасное для данного летательного аппарата препятствие,
вершина которого располагается выше упомянутой условной кривой;
d/ экипажу сообщают координаты упомянутой вершины этого опасного препятствия.
Таким образом, благодаря данному изобретению появляется возможность идентифицировать среди всех потенциальных препятствий, как видимых для пилота, так и не различимых визуально, именно то препятствие, которое представляет собой непосредственную опасность для данного летательного аппарата и требует со стороны пилота немедленного выполнения маневра для облета этого препятствия в том случае, если она находится явно на траектории полета летательного аппарата.
В то же время изобретение обеспечивает существенное сокращение препятствий, которые должен учитывать пилот при пилотировании, что значительно упрощает его работу при наблюдении за впередилежащим пространством.
В предпочтительном примере выполнения предлагаемого изобретения зона перед данным летательным аппаратом подразделяется на угловые секторы и в каждом из этих секторов выполняют упомянутые операции a, b, c и d. Таким образом, при использовании предлагаемого изобретения пилот летательного аппарата располагает не только возможностью выполнения вертикального облета препятствий в некотором определенном направлении полета, но также и возможностью пилотирования при боковом облете препятствий на основе данных, получаемых для каждого из упомянутых выше угловых секторов.
Кроме того, в предпочтительном примере выполнения данного изобретения в каждом из упомянутых выше угловых секторов расчитывают координаты некоторой опорной точки, располагающейся на некотором предварительно определяемом расстоянии над вершиной данного опасного препятствия, причем это предварительно определяемое расстояние соответствует минимально требуемой высоте облета этого опасного препятствия.
Таким образом, путем формирования для пилота изображения этой опорной точки, указывают именно ту точку пространства, через которую он должен провести свой летательный аппарат, так чтобы осуществить облет опасного препятствия в оптимальных условиях, то-есть на минимальной высоте над вершиной этого препятствия, но без всякого риска столкновения с ним. Очевидно, что эта минимальная безопасная высота облета препятствия с учетом летных характеристик данного летательного аппарата и выполняемой им в данном случае задаче. В частности для вертолета в качестве такой минимальной безопасности высоты облета препятствия может приниматься высота облета, составляющая 20 м.
Для этого, чтобы с наибольшей эффективностью обеспечить представление пилоту летательного аппарата указанной выше информации на изображение местности наносятся специальные характерные знаки и точки пространства, соответствующие упомянутым выше точкам, предварительно определенным по координатам.
Таким образом, в тех случаях, когда эти координаты представляют собой координаты упомянутых выше опорных точек, пилот непосредственно видит ту точку пространства, через которую он должен провести свой летательный аппарат для оптимального облета данного препятствия. В тех случаях, когда эти координаты представляют собой собственно координаты вершин опасных препятствий, это наложение характерных точек на изображение дает возможность отчетливо и наглядно представлять эти опасные препятствия, которые не всегда можно рассмотреть, а возможность легкого распознавания которых часто меняются в зависимости от конкретных метеорологических условий. Следовательно, это наложение на изображение внекабинного пространства специальных характерных знаков оказывает пилоту данного летательного аппарата эффективную помощь в наблюдении за пролетаемым рельефом местности, существенно облегчая эту его задачу особенно в условиях плохой видимости и помогает распознать опасные препятствия на пути движения этого летательного аппарата при выполнении полета на малой высоте.
В предпочтительном примере выполнения предлагаемого изобретения определяется пилотажная кривая, соответствующая сглаженной кривой, связывающей между собой все упомянутые выше опорные точки, и затем эта кривая накладывается на изображение местности в направлении полета. Таким образом, что эти характерные точки указывают положение вектора скорости данного летательного аппарата вдоль траектории полета.
Итак, кривая пилотирования делит изображение внекабинного пространства на две части. При этом нижняя часть этого изображения, которая заключена между поверхностью земли и упомянутой выше кривой пилотирования представляет собой зону, которую данный летательный аппарат должен избегать любой ценой, поскольку она содержит опасные препятствия, с которыми возможно столкновение. Верхняя часть представляемого пилоту изображения, располагающаяся выше упомянутой пилотажной кривой, не содержит никаких опасных для данного летательного аппарата препятствий и является зоной безопасного полета.
Следует также отметить, что для осуществления полета на минимальной высоте, но без опасности столкновения данного летательного аппарата с имеющимися по траектории его движения препятствиями, достаточно, чтобы пилот направлял свой летательный аппарат на точки на пилотажной кривой, поскольку по определению эта пилотажная кривая связывает между собой опорные точки, определяемые описанным выше способом с учетом минимальной высоты облета какого-либо препятствия.
Следовательно, для осуществления облета препятствий по оптимальной траектории пилоту достаточно направлять свой летательный аппарат таким образом, чтобы совмещать с упомянутой выше пилотажной кривой упомянутый характерный знак вектора скорости, который, как сказано выше, указывает фактическое направление полета данного летательного аппарата.
За счет использования предлагаемого изобретения имеется возможность осуществлять управление полетом летательным аппаратом по траектории путем совмещения изображения внекабинного пространства, вектора скорости этого летательного аппарата с постоянной формируемой пилотажной кривой.
Необходимо обратить внимание на то, что упомянутая выше кривая пилотирования содержит косвенную информацию о расстоянии до препятствий, поскольку угловое отклонение между вершиной того или иного препятствия и пилотажной кривой пропорционально расстоянию между этим препятствием и данным летательным аппаратом.
Для того, чтобы не перегружать деталями изображение местности представляемой пилоту данного летательного аппарата, на упомянутое выше изображение пролетаемой местности накладывается в предпочтительном примере выполнения предлагаемого изобретения только центральная часть упомянутой выше кривой пилотирования, содержащий только те точки пространства, которые доступны для данного летательного аппарата с учетом предварительно определяемого ограниченного по величине угла крена. Это позволяет, кроме того, отчетливо показывать пилоту ту часть пространства, которую его летательный аппарат может достигнуть, исходя из его данного положения.
Кроме того, постоянное наличие в поле зрения пилота этой доступной для него части кривой пилотирования позволяет ему визуально проверять соответствие этой кривой препятствиям, которые он непосредственно видит. Следует заметить, что упомянутая выше ограниченная величина крена данного летательного аппарата зависит, в частности, от типа этого летательного аппарата. Для вертолета можно использовать, например, 45o.
Следует отметить также, что пилотирование летательного аппарата путем совмещения вектора скорости с кривой пилотирования не позволяет во всех случаях совершить облет данного препятствия на минимальной высоте над ним строго в горизонтальном полете. Для устранения этого недостатка и обеспечения более быстрого достижения данным летательным аппаратом требуемой высоты полета для перехода в горизонтальный полет перед облетом этого препятствия можно осуществлять управление летательным аппаратом при помощи вспомогательной пилотажной кривой, смещенной в направлении этого летательного аппарата и формируемой аналогичным образом с использованием измененных координат зафиксированных опасных препятствий, получаемых в каждом конкретном случае путем уменьшения в одном и том же соотношении, например, на четверть, горизонтальной составляющей упомянутых выше координат.
При этом в предпочтительном примере выполнения предлагаемого изобретения выполняется расчет вспомогательной кривой пилотирования, производимый аналогично расчету основной кривой пилотирования, но с учетом опасных препятствий, располагающихся на более удаленном расстоянии от данного летательного аппарата, и эта вспомогательная кривая пилотирования накладывается на изображение внекабинного пространства данного летательного аппарата в виде, например, пунктирной линии с тем, чтобы ее можно было легко отличить от основной пилотажной кривой. Эта вспомогательная кривая пилотирования позволяет выявить те препятствия, которые располагаются на большем удалении от данного летательного аппарата, чем те которые указаны основной кривой пилотирования, и которые необходимо будет принимать во внимание после преодоления упомянутых выше опасных препятствий. Такая информация может, в частности, помочь пилоту в выборе возможного бокового облета имеющихся на траектории полета препятствий.
Возможно также и отдельное использование упомянутой выше вспомогательной кривой пилотирования без ее наложения на изображение внекабинного пространства. Информацию, которую несет эта вспомогательная кривая пилотирования, можно использовать, например, для дифференциации некоторых частей пилотажной кривой, указывая пилоту направления ухода от возможности встречи с опасными препятствиями, то есть те направления, где упомянутая выше вспомогательная кривая пилотирования располагается выше, то-есть предпочтительные направления полета, именно те направления, где вспомогательная кривая пилотирования располагается низко. Эта дифференциация может быть практически обозначена различными толщинами линии кривой пилотирования, путем использования пунктирных линий или цвета.
В предпочтительном примере выполнения предлагаемого изобретения определяется точка оптимального по высоте облета, соответствующая точке кривой пилотирования, на которую должен направлять свой летательный аппарат пилот для того, чтобы реализовать оптимальную траекторию пролета над данным препятствием.
В соответствии с предлагаемым изобретением для определения упомянутой выше
точки оптимального по высоте облета данного препятствия выполняют следующие операции:
для каждой опорной точки кривой пилотирования расчитываются относительное компенсированное расстояние D,
определяющее действительность соотношения D= h+kV, где h представляет собой горизонтальную дальность, а V представляет собой вертикальное расстояние между упомянутой выше опорной точкой и положением
вектора скорости данного летательного аппарата, и k представляет собой предварительно определенный коэффициент пропорциональности;
осуществляют сравнение между собой упомянутых выше
относительных компенсированных расстояний, вычисленных указанным выше способом,
в качестве оптимальной точки облета данного препятствия определяется опорная точка, относительное
компенсированное расстояние которой оказывается наименьшим.
В ряде случаев может оказаться достаточным для определения точки оптимального облета данного участка рельефа местности ограничиться опорными точками трех угловых секторов, а именно, центрального углового сектора, располагающегося непосредственно по курсу данного летательного аппарата и, в котором находится вектор его скорости, а также двух прилегающих к нему секторов, располагающихся соответственно справа и слева от этого центрального углового сектора.
Упомянутая выше точка оптимального облета препятствия может быть использована двумя различными способами. С одной стороны, можно наложить на изображение впереди лежащей местности специальный характерный знак, указывающий эту точку оптимального облета. В этом случае для осуществления облета препятствия в оптимальных условиях достаточно совместить индекс вектора скорости данного летательного аппарата с упомянутым характерным знаком точки оптимального облета. С другой стороны, можно передать координаты этой точки оптимального облета препятствия в автопилот данного летательного аппарата в соответствующем режиме его работы для осуществления автоматического облета.
В то же время на изображение внекабинного пространства накладывается специальный характерный знак, помещенный в ту точку упомянутой выше кривой пилотирования, через которую пройдет траектория полета данного летательного аппарата при выдерживании неизмененным его текущего крена.
В предпочтительном примере выполнения предлагаемого изобретения упомянутая выше условная кривая образована некоторой прямолинейной частью, имеющей длину P и параллельную вектору скорости данного летательного аппарата, и дугой окружности радиуса R, зависящего от возможностей маневрирования данного летательного аппарата, характеризующих его способность к пикированию и кабрированию, то есть к динамическим маневрам в вертикальной плоскости полета.
В предпочтительном примере выполнения длина P прямолинейного участка упомянутой выше условной кривой пропорциональна скорости полета данного летательного аппарата, что позволяет обеспечить постоянную при любой скорости данного летательного аппарата продолжительность полета/длительность предупреждения/, необходимо для преодоления этой дистанции P. Эта фиксированная длительность предупреждения или оповещения, составляющая, например, 3 секунды для самолета или 5 секунд для вертолета, соответствует максимальному времени запаздывания, отведенному пилоту данного летательного аппарата на принятие решения о начале маневра облета препятствия, после того, как получена команда на облет этого опасного препятствия.
В то же время, радиус R упомянутой выше дуги окружности отвечает соотношению R= Rc+Rp, где Rc это предельно возможный радиус маневра кабрирования данного летательного аппарата, зависящий от установленной для этого летательного аппарата, зависящий от установленной для этого летательного аппарата предельной вертикальной перегрузки при кабрировании и Rp это предельный радиус маневра при пикировании, зависящий от минимально допустимой для данного летательного аппарата вертикальной перегрузки при пикировании.
Следует заметить, что предельный коэффициент вертикальной перегрузки при пикировании обычно определяется с учетом из соображений, относящихся к комфорту пилота и пассажиров данного летательного аппарата, поскольку возможности большинства летательных аппаратов в отношении коэффициента отрицательной перегрузки в вертикальной плоскости снижаются весьма незначительно в зависимости от полетной массы данного летательного аппарата, температуры окружающего воздуха и атмосферного давления. Обычно допустимой для пилотов величиной является коэффициент 0,6g, где g представляет собой ускорение свободного падения.
И наоборот, предельная положительная вертикальная перегрузка, которую может выдержать данный летательный аппарат, очень существенно зависит от перечисленных выше, параметров, а именно, от полетной массы данного летательного аппарата, температуры окружающего воздуха и атмосферного давления, а также от скорости и углового положения летательного аппарата в данный момент его полета.
Кроме того, поскольку упомянутая выше кривая пилотирования формируется путем расчета множества точек, можно принять для этого расчета либо одну и ту же величину в каждой точке этой кривой пилотирования, либо учитывать различные величины, принимая во внимание то обстоятельство, что данный летательный аппарат должен пойти в крен и для того, чтобы достигнуть соответствующих точек кривой пилотирования, которые не располагаются точно на линии текущего курса этого летательного аппарата в данный момент, и что это крен, таким образом, приводит к уменьшению предельно допустимой вертикальной перегрузки для данного летательного аппарата.
Таким образом, в рамках предлагаемого изобретения можно определять различными способами упомянутый выше коэффициент предельно допустимой вертикальной перегрузки при кабрировании, используемой для расчета предельного радиуса кабрирования Rc. Можно, например, взять для расчета фиксированную величину предельной нормальной перегрузки, которую данный летательный аппарат способен выдержать по всей допустимой для него области полета, или можно пойти другим путем и принимать во внимание некоторые предварительно определенные величины, изменяющиеся в зависимости от скорости полета данного летательного аппарата. В соответствии с другими потенциально имеющимися возможностями можно определять упомянутый выше коэффициент предельно допустимой нормальной перегрузки непосредственно, исходя из фактически имеющей место температуры окружающего воздуха, атмосферного давления на данном этапе полета летательного аппарата, его фактической массы и существующей на данный момент скорости полета.
В предпочтительном примере использования предлагаемого изобретения в каждом из упомянутых выше угловых секторов зона поиска ограничена дальностью L от данного летательного аппарата, удовлетворяющей соотношению L P + R, что исключает учет препятствий, которые не могут быть определены как опасные препятствия, поскольку они находятся за пределами дальности упомянутой выше условной кривой, то есть дальности L, связанной с данным летательным аппаратом.
Для
осуществления способа в соответствии с предлагаемым изобретением предусмотрено устройство, содержащее:
телеметрический датчик, предназначенный для измерения направления и дальности для всех
препятствий, располагающихся в упомянутых выше зонах поиска;
вычислитель, связанный с упомянутым выше телеметрическим датчиком и расчитывающий упомянутую выше условную кривую на основе
полученной от датчика информации, а также выделяющий опасные препятствия и способный рассчитать координаты опорных точек и упомянутую выше кривую пилотирования;
устройство визуализации,
связанное с упомянутым выше вычислителем и способное представить пилоту данного летательного аппарата путем наложения на вид внекабинного пространства /на лобовое стекло/ или на изображение этого
внекабинного пространства характерные знаки с упомянутыми выше координатами, кривую пилотирования, а также специальный характерный знак или индекс, указывающий положение вектора скорости.
В предпочтительном примере выполнения упомянутое выше устройство снабжено звуковым предупредительным сигналом, объединенным с отметкой времени, который связан с устройством визуализации и включается в том случае, когда упомянутый выше вектор скорости находится ниже кривой пилотирования дольше некоторого предварительно установленного промежутка времени, например, половины длительности предупреждения.
В то же время, упомянутое выше устройство визуализации фильтрует изменения расположения кривой пилотирования и представляет пилоту эти изменения плавно, постепенно меняя информацию, что позволяет исключить резкие скачки изображения кривой пилотирования, способные помещать пилоту правильно выполнить свою задачу и вызвать его преждевременное утомление.
На фиг. 1 А-С изображена условная кривая, связанная с оптимальной траекторией преодоления препятствия; на фиг. 2 схематическое изображение разделения пространства перед данным летательным аппаратом на угловые секторы; на фиг. 3 схема представления результатов вычислений при помощи их наложения на изображение внекабинного пространства; на фиг. 4 схематическое изображение другого способа представления результатов вычислений, а также наложения на изображение внекабинного пространства; на фиг. 5 схема определения полезной части кривой пилотирования; на фиг. 6 упрощенная блок-схема устройства согласно изобретению.
Изобретение предназначено для формирования и представления пилоту данных для обеспечения пилотирования летательного аппарата, в частности, вертолета, на предельно малой высоте в условиях наличия опасных препятствий с указанием пилоту опасных для данного летательного аппарата препятствий в зоне его полета.
Для определения этих опасных препятствий используется условная кривая P, связанная с данным летательным аппаратом A. Порядок построения этой условной кривой поясняется ниже со ссылками на фиг. IA, IB и IC.
Расчет и построение этой условной кривой Г выполняется в системе координат /ОХ, OY/, причем начало координат точка О представляет собой данный летательный аппарат. Ось ОХ расположена параллельно вектору скорости


Для того, чтобы преодолеть представленное схематически препятствие 1 и пролететь горизонтально над самой его вершиной 2, то есть в горизонтальном направлении пролететь на уровне точки 3, расположенной намного выше этой вершины 2, данный летательный аппарат A должен перемещаться по траектории TI, которая содержит, с одной стороны, дугу окружности 5 с радиусом Rc, начинающую в исходной O и заканчивающуюся в точке 4, и, с другой стороны, дугу окружности 6 с радиусом Rp /не изображена/, проходящую от точки 4 и до точки пролета вершины препятствия 3.
Радиусы кривизны траектории полета летательного аппарата P и Pp, характеризующие соответственно предельные радиусы кабрирования и пикирования, зависят от маневренных возможностей данного летательного аппарата A. Они расчитываются соответственно, исходя из предельно допустимых коэффициентов перегрузки при кабрировании и при пикировании аналогично тому, что уже было сказано по этому поводу выше.
Вершина 2 препятствия, так же как и точка 3 траектории полеталетательного аппарата, расположена на дуге окружности 7, являющейся касательной к направлению вектора скорости в исходной точке O и имеющей радиус R=Rc+Rp.
Траектория TI, как она представлена на фиг. IA, представляет собой траекторию облета препятствия 1 практически без запаса по высоте, поскольку точка 3 пролета над препятствием располагается лишь чуть-чуть вершины 2 этого препятствия 1. Для того, чтобы пролететь над этим препятствием 1 с некоторым вертикальным запасом по высоте H, соответствующим, например, упомянутой выше минимальной высоте облета препятствия, дугу окружности 7 смещают вниз на расстояние H /по отношению к данному летательному аппарату/, т.е. смещают в направлении оси Oy в отрицательную ее строну, так как показано на фиг. IB.
Кроме того, для предоставления пилоту данного летательного аппарата возможности располагать некоторым временем DR для реагирования /длительностью предупреждения/ перед началом маневра по облету препятствия 1 эту дугу окружности 7 смещают на расстояние P вперед, т.е. вдоль оси Ox, так, как показано на фиг. 10. Следует иметь в виду, что для того, чтобы располагать временем реакции или длительностью DR предупреждения определенной величины, например, 3 секунды при любой скорости полета данного летательного аппарат это упомянутое выше расстояние P определяется пропорциональным скорости полета данного летательного аппарата V, исходя из соотношения P=DR•V.
В этих условиях летательный аппарат A движется по траектории облета препятствия T2, соответствующей оптимальной траектории преодоления препятствия с учетом фактических маневренных возможностей данного летательного аппарата. Углы наклонов траектории T2 являются более сглаженными по сравнению с углами наклона траектории T1, которая для примера представлена на фиг. 1 с пунктиром и представляет собой предельную траекторию.
Таким образом, получают, в конечном счете, искомую условную кривую F. Эта кривая в ее окончательном виде образована прямолинейной частью 8 длиной P и дугой окружности 7.
Описанные выше этапы построения условной кривой F и ее расчета позволяют выявить все преимущества этой кривой и продемонстрировать ее связи с теоретической траекторией T2 оптимального преодоления данного препятствия.
Следует отметить, что данная траектория облета препятствия 1 является оптимальной, т. е. аналогичной упомянутой выше траектории T2, в том случае, если маневр облета начинается в тот же самый момент, когда преодолеваемое в данном случае препятствие 1 касается упомянутой выше условной кривой F.
В системе координат /Ox, Oy/ не показанная на фиг. окружность, частью которой является дуга 7, в целом описывается уравнением:
(x-p)2+[y-(R-H)2]R2;
где

Следовательно, в упомянутой выше системе координат /Ox, Oy/уравнение условной кривой F имеет вид:

Таким образом, упомянутая выше условная кривая Г ограничена расстоянием L=D+R от точки начала координат O.
Эта условная кривая F используется для определения опасных для данного летательного аппарата препятствий, как это будет показано ниже.
С этой целью рассматривается только зона 10, располагающаяся непосредственно перед данным летательным аппаратом, как показано на фиг. 2, и содержащая по меньшей мере часть пространства, которого летательный аппарат может достигнуть из своего исходного или текущего положения с учетом своих динамических характеристик. В соответствии с изобретением эта впередилежащая зона пространства 10 разделена на угловые секторы с одинаковым углом раствора d, обозначенные на фиг. 2 позициями 11-14 и прилегающие друг к другу.
В каждом из
упомянутых выше угловых секторов 11-14 выполняют следующие операции:
определяют все препятствия, обозначенные на фиг. 2 позициями 15-20 и располагающиеся в зоне поиска, при помощи, например,
телеметрического датчика;
вершины 2 выявленных таким образом препятствий 15-20 сравнивают с упомянутой выше условной кривой F, связанной с данным летательным аппаратом и не представленной на
фиг. 2;
определяют в качестве опасных те препятствий 16, 18 и 20, вершины 2 которых
расположены выше упомянутой условной кривой Г,
фиксируют положение этих вершин 2, определенных в
качестве опасных препятствий 16, 18 и 20.
Очевидно, что когда в каком-либо секторе нет никаких явных препятствий, как, например, в секторе 12, в качестве опасного препятствия определяется точка 21 поверхности земли /см. фиг. 3/.
Обычно в таких устройствах используется телеметрический датчик типа, например, радиолокатор, совместно с лазерным лучом, который равномерно и периодически осуществляет обзор пространства, расположенного перед упомянутым выше датчиком. В каждом направлении этот датчик регистрирует в частности расстояние до земли. Все выявленные точки рельефа местности, такие, например, как деревья, неровности земли или провода, для которых таким образом известны направление и дальность по отношению к данному летательному аппарату, рассматриваются как препятствия, которые могут быть использованы при практической реализации изобретения.
Например, согласно изобретению в системе координат, связанной с данным летательным аппаратом, рассчитывается высота /то есть координата по оси y в соответствии с фиг. 1/ каждого препятствия. Затем рассчитывается разность высот между каждым препятствием y(O) и соответствующей точкой y(F) условной кривой F. Препятствием, определяемым как опасное, будет то препятствие, для которого разница y(O)-y(F) будет наибольшей по алгебраической величине при любом характере этого препятствия /деревья, земля, провод./.
Кроме того, по определению условная кривая F ограничена на расстоянии L= D+R и упомянутые выше зоны поиска, связанные с различными угловыми секторами 11-14, также ограничены на расстоянии L от данного летательного аппарата. Поэтому препятствия, которые расположены на большем расстоянии, оказываются вне досягаемости условной кривой Г и не могут, таким образом, быть определены как опасные препятствия.
Описанные выше результаты представляются пилоту данного летательного аппарата путем наложения на картину 22 внекабинного пространства непосредственно, например, посредством коллиматорного прицела на лобовом стекле или нашлемного прицела, или путем представления на экране "верхняя или нижняя части экрана/ суперпозиции изображения/ в видимом секторе или в режиме ночного видения/.
Предлагаемое изобретение допускает использование различных способов представления полученных результатов.
В соответствии с первым возможным примером представления на картину 22 впередилежащей местности накладываются характерные знаки в виде перекрестий 23, помещенных на вершине 2 опасных препятствий 16, 18 и 20 так, как показано на фиг. 3.
Такое техническое решение имеет двойное преимущество. С одной стороны, оно позволяет обозначить среди всех имеющихся на пути данного летательного аппарата препятствий с 15 по 20 те же из них, которые определены как опасные и на которых пилот должен сконцентрировать все свое внимание. С другой стороны, такой способ представления обеспечивает эффективную помощь при наблюдении внекабинного пространства, особенно полезную в условиях плохой видимости, указывая пилоту наличие препятствий, которые не могли бы быть распознаны.
С целью создания более ясной картины можно использовать специальный знак или индекс 24 в тех случаях, когда данное опасное препятствие касается точки земной поверхности, например, точки 21, как показано на фиг. 3.
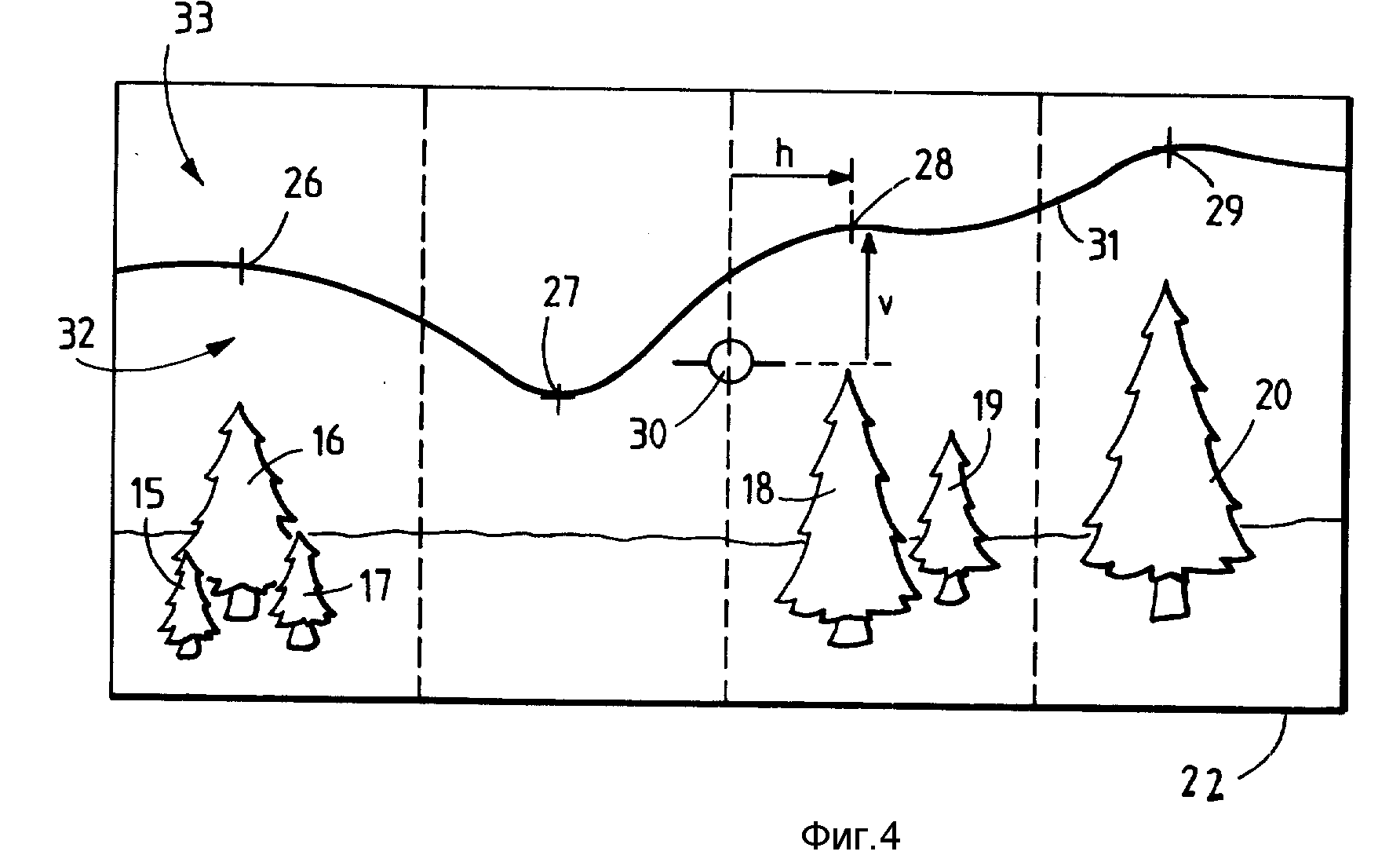
В соответствии с другим возможным способом представления полученных результатов на картину впередилежащей местности накладываются характерные знаки в виде перекрестий 25, помещенных в точки пространства 26-29 /опорные точки/, находящиеся на определенной высоте над вершинами 2 опасных препятствий. Используя в качестве этой предварительно определенной высоты упомянутую выше минимальную высоту пролета над препятствием H, пилоту дается ясное указание той точки пространства, через которую он должен провести свой летательный аппарат для того, чтобы осуществить облет данного препятствия по оптимальной траектории, то-есть на минимально допустимой высоте над препятствием и без риска столкновения с ним.
Для облегчения такого маневра на картину 22 дополнительно накладывается индекс 30, указывающий положение вектора скорости данного летательного аппарата. Этот индекс указывает направление полета летательного аппарата А. Таким образом, для осуществления оптимального облета препятствия 16, 18 и 20, определяемых как опасные, пилоту достаточно в этом случае управлять летательным аппаратом таким образом, чтобы совместить индекс 30 соответственно с перекрестием 25 опорных точек 26, 28 или 29, связанных с этим опасным препятствием 16, 18 или 20.
В соответствии с третьим возможным способом представления полученных результатов на картину 22 впередилежащего пространства накладывается кривая пилотирования 31, соответствующая сглаженной кривой, связывающей между собой все упомянутые выше опорные точки с 25 по 29, как показано на фиг. 4. Эта кривая 31 делит картину 22 внекабинного пространства на две части: нижнюю часть 32, которой данный летательный аппарат должен избегать по причине наличия там опасных препятствий 16, 18 и 20, и верхнюю часть 33, не содержащую никаких опасных препятствий. Таким образом, для выполнения полета на предельно малой высоте без опасности столкновения с препятствием достаточно пилотировать данный летательный аппарат A таким образом, чтобы удержать в совмещенном положении индекс 30 вектора скорости и упомянутую выше пилотажную кривую 31.
Для того, чтобы не перегружать информацией изображение 22, передаваемое пилоту, на нем изображается только центральная часть 34 этой кривой пилотирования 31 так, как показано на фиг. 5. При этом исключаются боковые части этой кривой пилотирования 35 и 36, которые содержат точки пространства, недоступные для данного летательного аппарата при заданном ограничении крена. На фиг. 5 пунктиром показаны линии 37 и 38, соответствующие условным траекториям полета с максимально допустимым креном соответственно вправо и влево, которые могут быть реализованы летательным аппаратом, находящимся в точке 39.
Очевидно, что различные точки упомянутой выше центральной части 34 кривой пилотирования 31 более или менее легко доступны для данного летательного аппарата. Для облегчения пилоту задачи выбора определяется оточка оптимального облета, соответствующая той точке центральной части 34 кривой пилотирования, в направлении которой должен пилотироваться летательный аппарат A для того, чтобы реализовать оптимальную траекторию пролета над имеющимися на этой траектории препятствиями.
С этой целью осуществляют следующие операции согласно
изобретению:
для каждой опорной точки с 27 по 29 центральной части 34 кривой пилотирования 31 расчитывают относительное компенсированное расстояние D, удовлетворяющее соотношение D=h+KV, где
h представляет собой горизонтальное расстояние и V представляет собой вертикальное расстояние между упомянутой выше опорной точкой 27, 28 или 29 и текущим положением 30 вектора скорости данного
летательного аппарата так, как показано для опорной точки 28 на фиг. 4 и K представляет собой некоторый заданный коэффициент;
рассчитанные таким образом относительные компенсированные
расстояния сравнивают между собой;
в качестве оптимальной точки пролета определяют ту опорную точку кривой пилотирования, для которой характерно наименьшее относительное компенсированное
расстояние.
Величина упомянутого выше коэффициента K выбирается положительной и превышающей I для того, чтобы отдать предпочтение боковому обходу данного препятствия по сравнению с его облетом в вертикальной плоскости.
Для того, чтобы помощь пилоту выдерживать наиболее приемлемую траекторию, например, для помощи в проходе между двумя возвышенными препятствиями, на изображение внекабинного впередилежащего пространства накладывается специальный характерный знак 48, помещенный в точку 49 кривой пилотирования 31, через которую должен пролетать данный летательный аппарат, если он будет выдерживать свой текущий крен, причем величина этого текущего крена указывается положением индекса 30 вектора скорости так, как показано на фиг. 5.
Таким образом, для того чтобы пройти, например, между двумя возвышенными препятствиями, достаточно, чтобы пилот управлял летательным аппаратом так, чтобы совмещать перекрестие 48 с точкой пространства и упомянутой выше кривой пилотирования, через которую он хотел бы пройти, и выдерживать это совмещенное положение.
На фиг. 6 представлена упрощенная блок-схема системы 40 в соответствии с
изобретением, предназначенной для осуществления описанного выше способа, которая 40 содержит:
телеметрический датчик 41, предназначенный для определения направления и дальности всех
препятствий с 15 по 20, располагающихся в различных зонах поиска;
вычислитель 42, соединенный при помощи линии связи 43 с упомянутым выше телеметрическим датчиком 41 и обеспечивающий расчет
упомянутой выше условной кривой Г исходя из зафиксированных данных, определение опасных препятствий 16, 28 и 20 и способный вычислить координаты вершин 2 этих опасных препятствий, координаты опорных
точек с 26 по 29 и расчитать упомянутую выше кривую пилотирования 31;
устройство визуализации 44, соединенное с упомянутым выше вычислителем при помощи линии связи 45 и предназначенное для
представления пилоту данного летательного аппарата методом наложения на картину впередилежащей местности упомянутых выше характерных знаков 23 и 25, упомянутой выше кривой пилотирования 31, а также
перекрестия 30, указывающего текущее положение вектора скорости данного летательного аппарата.
В то же время, звуковой предупреждающий сигнал 46, связанный с не показанным на фиг. 6 отметчиком времени, соединен с упомянутым выше устройством визуализации 44 при помощи линии связи 47. Этот звуковой сигнал 46 предупреждения включается в том случае, когда индекс 30 указателя вектора скорости данного летательного аппарата находится ниже кривой пилотирования 31 в течение некоторого заранее определенного времени, уведомляя таким образом пилота о необходимости срочного выполнения маневра облета или обхода, имеющегося препятствия.
Реферат
Использование: для обеспечения безопасности пилотирования летательных аппаратов при полетах на малой высоте. Техническая сущность изобретения заключается в анализе рельефа местности в зоне перед летящим аппаратом с учетом всех препятствий и маневренных возможностей аппарата, расчетом некоторой условной кривой полета и сравнении ее с теоретически оптимальной траекторией облета препятствия. При этом выявляют те препятствия, по маршруту, вершины которых расположены выше условной кривой и координаты этих вершин сообщают пилоту в виде характерных знаков на изображении картины впереди расположенного внекабинного пространства. Изобретение включает систему устройств, учитывающих все опасные для пилотирования летательного аппарата препятствия по предполагаемому маршруту полета и предоставляющих пилоту информацию об оптимальной безопасной траектории полета при облете препятствий. Система обеспечивает также возможность использования автопилота для управления полетом по оптимальной траектории на малой высоте, возможность контроля за безопасность полетов и выдачи в случае необходимости аварийных сигналов пилоту для коррекции траектории полета. 2 с. и 22 з.п. ф-лы, 6 ил.

Формула

R Rc + Rp,
где Rc предельно допустимый радиус кабрирования данного летательного аппарата, зависящий от предельного допустимого коэффициента перегрузки при кабрировании;
Rp предельно допустимый радиус пикирования, зависящий от предельно допустимого коэффициента перегрузки при пикировании.
Комментарии