Электронная система управления полетом для летательного аппарата, выполненного с возможностью висения - RU2529573C2
Код документа: RU2529573C2
Чертежи




Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к электронной системе управления полетом для летательного аппарата, выполненного с возможностью висения, в частности вертолета, оснащенного несущим винтом и рулевым винтом, к которому настоящее изобретение относится просто в качестве примера.
Уровень техники
Известны вертолеты, содержащие несущий винт и рулевой винт, соединенные между собой и вращаемые посредством одного или более двигателей.
При подаче мощности несущий и рулевой винты фактически работают в трех диапазонах: нормальный (установившийся) рабочий диапазон, при котором скорость вращения винта (об/мин) обычно находится в диапазоне 96-102% от заданной номинальной скорости вращения; нижний рабочий диапазон, при котором скорость вращения винта обычно находится в диапазоне 90-96%; и верхний рабочий диапазон, при котором скорость вращения винта обычно находится в диапазоне 102-106%. Эти скорости вращения, очевидно, являются только примерными, поскольку различные вертолеты имеют различные рабочие диапазоны в процентном отношении.
Известны автоматические системы, как описано, например, в WO 2008/48245, для уменьшения уровня шума, создаваемого вертолетами, посредством уменьшения скорости вращения несущего и рулевого винта. Шум, создаваемый винтами, увеличивается быстро наряду с увеличением скорости вращения (об/мин), и автоматические системы работают на основе таких параметров, как высота и скорость полета и температура воздуха, чтобы помогать пилоту в регулировании скорости вращения винта, с тем чтобы достигать требуемого низкого уровня шума.
Сущность изобретения
Заявитель выяснил, что для того, чтобы обеспечивать безопасный полет, автоматические электронные системы управления полетом должны обрабатывать значительный объем данных. При заданных окружающих условиях и/или условиях пространственного положения в полете переключение от низкой на высокую скорость вращения несущего винта может приводить к потере управления или повреждению вертолета, и обратное в равной степени критично. Уменьшение скорости вращения винта в неподходящих условиях полета может приводить к непоправимой потере управления вертолетом. В функциональном отношении электронные системы управления полетом также являются довольно негибкими за счет простого автоматического управления переключением с высокой на низкую или с низкой на высокую скорости вращения несущего и рулевого винтов на основе одного или более типов полетной информации и являются неподходящими для заданий, требующих максимально автоматического управления полетом, даже в критических условиях. Такие системы, фактически, ограничены простой деактивацией автоматического переключения с режима с высоким уровнем шума (высокой скоростью вращения винта) на режим с низким уровнем шума (низкой скоростью вращения винта) и наоборот, если определенные условия не удовлетворяются.
Область применения для индивидуализированных заданий и автоматического управления полетом в критических условиях, следовательно, является достаточно ограниченной, и профили полета по заданию не могут быть заданы и автоматизированы одновременно и эффективно, и безопасно.
Заявитель, следовательно, разработал электронную систему управления полетом, которая обеспечивает безопасное автоматическое управление скоростью вращения одного или более винтов летательного аппарата очень гибким и адаптируемым к заданию способом.
Цель настоящего изобретения заключается в том, чтобы обеспечить электронную систему управления полетом для летательного аппарата, выполненного с возможностью висения, выполненную с возможностью исключать вышеуказанные недостатки существующего уровня техники.
Согласно настоящему изобретению предусмотрены электронная система управления полетом для летательного аппарата, выполненного с возможностью висения; летательный аппарат, оснащенный такой электронной системой управления полетом; и программное обеспечение для электронной системы управления полетом для летательного аппарата, выполненного с возможностью висения, как определено в прилагаемой формуле изобретения.
Краткое описание чертежей
Фиг.1 показывает блок-схему одного варианта осуществления системы управления полетом в соответствии с настоящим изобретением;
Фиг.2 графически показывает взаимосвязь рабочих характеристик различных режимов управления скоростью вращения винта в соответствии с одним вариантом осуществления настоящего изобретения;
Фиг.3 показывает схему состояний, иллюстрирующую переходы между различными режимами управления полетом в соответствии с одним вариантом осуществления настоящего изобретения;
Фиг.4 показывает схему состояний, иллюстрирующую переходы между различными режимами управления полетом в соответствии с дополнительным вариантом осуществления настоящего изобретения;
Фиг.5 показывает в табличной форме базу данных, содержащую скорости вращения винта наряду с изменениями высоты по плотности и скорости полета в режиме автоматического управления полетом с низким уровнем шума;
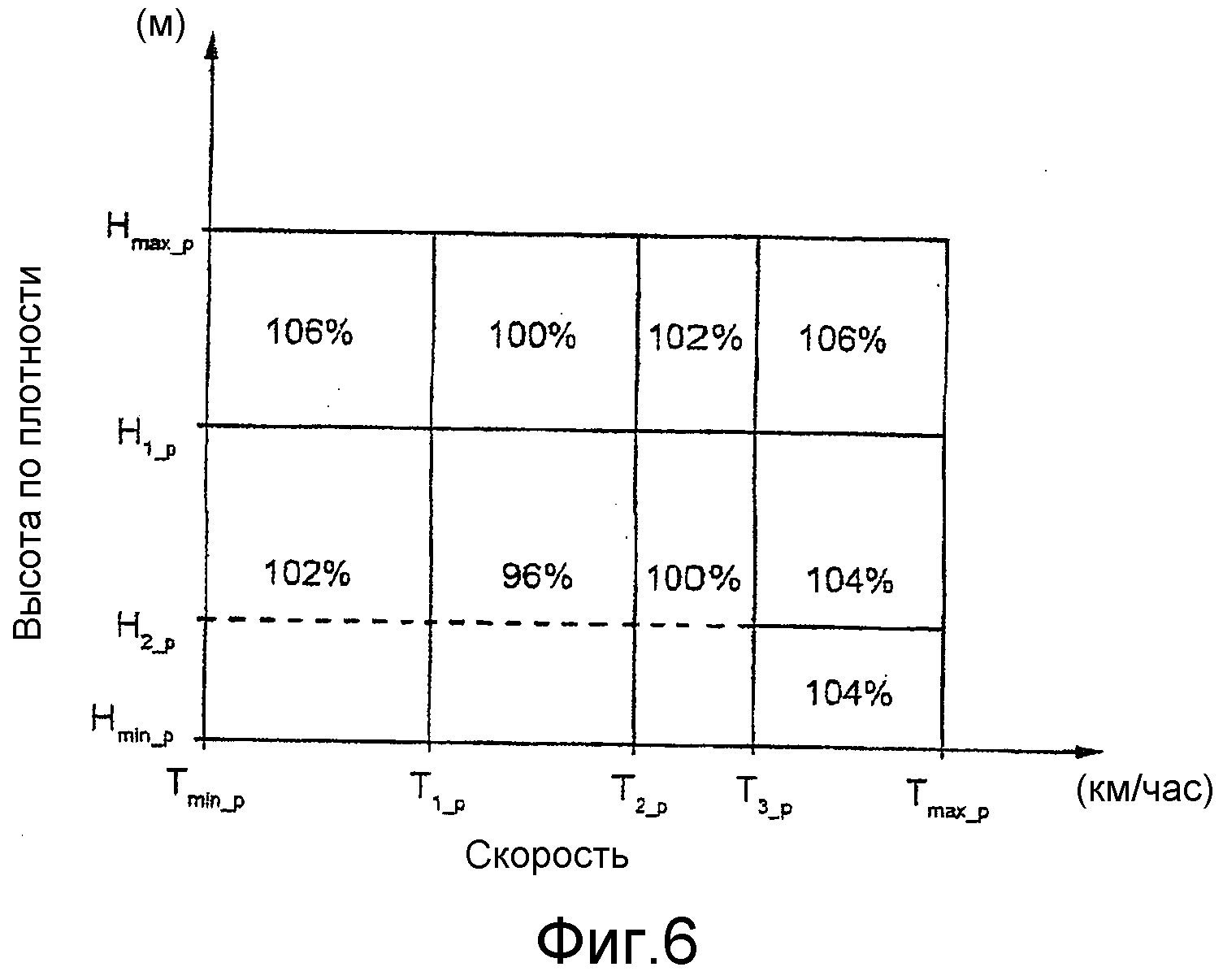
Фиг.6 показывает в табличной форме базу данных, содержащую скорости вращения винта наряду с изменениями высоты по плотности и скорости полета в автоматическом режиме управления полетом с высокими рабочими характеристиками;
Фиг.7 показывает вертолет, оснащенный системой управления полетом по фиг.1.
Подробное описание предпочтительных вариантов осуществления
Настоящее изобретение подробно описывается со ссылкой на прилагаемые чертежи, чтобы предоставлять возможность эксперту создавать и использовать его. Специалистам в данной области техники должно быть очевидным, что изменения могут быть внесены в описанные варианты осуществления и описанные общие принципы также могут применяться к другим вариантам осуществления и применения, тем не менее, без отступления от объема охраны настоящего изобретения, как определено в прилагаемой формуле изобретения. Настоящее изобретение, поэтому, не должно считаться ограниченным описанными и проиллюстрированными вариантами осуществления, а должно соответствовать самому широкому объему защиты согласно принципам и характеристикам, описанным и заявленным в данном документе.
Фиг.1 показывает блок-схему системы 1 управления полетом в соответствии с одним вариантом осуществления настоящего изобретения. Система 1 управления полетом устанавливается в вертолете 100 (фиг.7) и помимо прочего предусматривает управление одним или более двигателей 101 вертолета 100, которые управляют, в свою очередь, скоростью вращения несущего винта 102 и рулевого винта 104 вертолета 100.
Система 1 управления полетом содержит блок 2 управления пилота, который образует интерфейс между пилотом (не показан) и системой 1 управления полетом в целом и дает возможность пилоту активировать режим ручного управления посредством активации блока 4 ручного управления или режим автоматического управления посредством активации блока 6 автоматического управления.
Система 1 управления полетом содержит известное управление двигателем или блок 8 FADEC (автономной цифровой системы управления двигателем), который обычно содержит EEC (электронный контроллер двигателя) или ECU (модуль управления двигателем). FADEC 8 управляет всеми аспектами рабочих характеристик двигателя 101 вертолета 100, к которому относится система 1 управления полетом. Более конкретно, рабочие характеристики двигателя 101 управляются посредством блока 10 управления двигателем, соединенного с FADEC 8, который образует интерфейс между FADEC 8 и двигателем 101.
Когда активирован, блок 4 ручного управления образует диалоговый интерфейс, чтобы обеспечивать то, что введенные пилотом команды корректно принимаются FADEC 8, который, соответственно, управляет работой (скоростью вращения, мощностью и т.д.) двигателей посредством блока 10 управления двигателем.
Когда блок 4 ручного управления активирован, блок 6 автоматического управления деактивируется и пилот полностью управляет вертолетом 100.
Когда пилот командует блоку 2 управления пилота активировать блок 6 автоматического управления, блок 4 ручного управления деактивируется и FADEC 8 принимает команды, сформированные автоматически посредством блока 12 управления скоростью вращения, который содержит одно или более запоминающих устройств 14, сохраняющих данные, посредством которых блок 12 управления скоростью вращения идентифицирует команды (типично касательно требуемой скорости вращения винтов 102, 104), которые должны отправляться в FADEC 8. Данные, сохраненные в запоминающем устройстве/запоминающих устройствах 14, могут быть организованы в базы данных (например, как описано ниже со ссылкой на фиг.5 и 6), сохраненные в запоминающем устройстве/запоминающих устройствах 14. Блок 12 управления скоростью вращения соединяется с блоком 16 управления параметрами полета, в свою очередь соединяется с определенным числом датчиков 17, которые предоставляют в блок 16 управления параметрами полета данные окружающей среды (такие как высота, расстояние до земли, температура окружающей среды, атмосферное давление); данные относительно полетных условий вертолета 100 (такие как рабочие характеристики, скорость и направление полета, расход топлива); и данные относительно состояния по нагрузке и/или весу вертолета 100; или, кроме того, температуру выхлопных газов.
Более конкретно, датчики 17 содержат блок 18 датчиков состояния окружающей среды для получения внешних данных, таких как температура воздуха и/или атмосферное давление, и/или метеоусловия, и/или сила и направление ветра, и/или барометрическая высота (PA) и т.д.; датчик 20 веса для измерения веса вертолета 100 (например, посредством измерения веса на колесах или полозковых шасси вертолета 100 на земле); датчик 22 ориентации (например, приемное GPS-устройство и/или гирокомпас) для указания ориентации и курса; высотомер 24 для определения высоты вертолета над уровнем земли; один или более датчиков 26 скорости вращения лопастей для определения скорости вращения несущего винта 102 и/или рулевого винта 104; и один или более датчиков 28 положения ручки общего шага для передачи требуемой мощности в двигатели. Вертолет может, конечно, быть оснащен другими датчиками.
Высота по плотности также может извлекаться известным способом.
В одном варианте осуществления датчик 20 веса также преимущественно выполнен с возможностью указывать фактический полетный вес вертолета 100, например указывать уменьшение полетного веса вертолета 100 вследствие расхода топлива или увеличения веса вертолета 100, вызываемого за счет загрузки людей и/или груза в вертолет 100 в полете, например, с использованием лебедки (не показана). Соответственно, датчик 20 веса соединяется с датчиком уровня топлива (не показан), из которого он получает остаточный уровень топлива и связывает или преобразует остаточный уровень топлива в вес потребленного топлива (или, при вычислениях, он получает потерю веса вследствие расхода топлива). Датчик 20 веса также соединяется с дополнительным датчиком веса (не показан), соединенным с лебедкой, используемой для того, чтобы загружать людей и/или груз в вертолет 100, чтобы получать вес людей и/или загруженного груза. В отсутствие датчика, соединенного с лебедкой, пилот может вручную вводить вес или рассчитывать вес людей и/или груза, загруженного в вертолет 100.
Блок 16 управления параметрами полета также необязательно соединяется с бортовыми инструментами 38 (например, с одним или более видеоустройствами), чтобы предоставлять пилоту графическое отображение данных, полученных посредством вышеуказанных датчиков.
Система 1 управления полетом также содержит блок 40 рабочих характеристик для сбора данных относительно рабочих характеристик (т.е. полетной физической реакции) вертолета, который соединяется с блоком 10 управления двигателем, блоком 16 управления параметрами полета и посредством второго с блоком 12 управления скоростью вращения. Блок 12 управления скоростью вращения также соединяется с блоком 40 рабочих характеристик посредством устройства 42 автопилота и блока 44 управления полетом.
Увеличение скорости вращения винтов 102, 104 посредством блока 12 управления скоростью вращения вызывает изменение направления, и/или скорости полета, и/или высоты вертолета 100. При висении, например, устройства 42 автопилота, блок 44 управления полетом и блок 40 рабочих характеристик работают синергетически, чтобы поддерживать направление полета и, если не изменены пилотом, также скорость или высоту. Поскольку известны, работа блока 40 рабочих характеристик, устройства 42 автопилота и блока 44 управления полетом не описываются подробно. В завершение, блок 40 рабочих характеристик соединяется и снабжается посредством блока 16 управления параметрами полета информацией рабочих характеристик вертолета, зарегистрированной и/или измеренной посредством датчиков 17.
Система 1 управления полетом также содержит первый и второй блок 46, 48 интерфейса управления, соединяющие блоки 12 управления скоростью вращения с FADEC 8. Первый блок 46 интерфейса управления снабжается посредством FADEC 8 информацией о текущем рабочем режиме двигателя 101 (например, числе оборотов двигателя, эволютивной скорости вращения винтов 102, 104 и т.д.) и предоставляет эту информацию в блок 12 управления скоростью вращения. В свою очередь блок 12 управления скоростью вращения на основе информации из блока 18 датчиков состояния окружающей среды, датчика 20 веса, датчика 22 ориентации, высотомера 24, датчиков 26 скорости вращения лопастей, датчиков 28 положения ручки общего шага и первого блока 46 интерфейса управления и информации рабочих характеристик вертолета из блока 40 оценки рабочих характеристик обменивается данными с FADEC 8 через второй блок 48 интерфейса управления. Более конкретно, блок 12 управления скоростью вращения обменивается данными с FADEC 8, чтобы задавать скорость вращения несущего винта 102 и рулевого винта 104. FADEC 8, в свою очередь, передает скорость вращения в блок 10 управления двигателем, который через двигатель 101 вращает несущий винт 102 и рулевой винт 104 со скоростью, требуемой посредством блока 12 управления скоростью вращения.
Более конкретно, блок 12 управления скоростью вращения снабжается посредством блока 16 управления параметрами полета информацией, обнаруживаемой посредством датчиков 17, и, соответственно, командует второму блоку 48 интерфейса управления увеличивать или уменьшать скорость вращения винтов 102, 104. Блок 12 управления скоростью вращения также снабжает устройство 42 автопилота информацией относительно команды, чтобы увеличивать или уменьшать скорость вращения винтов 102, 104, так что устройство 42 автопилота через блок 44 управления полетом и на основе текущей информации рабочих характеристик вертолета из блока 40 рабочих характеристик управляет рабочими характеристиками вертолета 100, чтобы сохранять направление полета неизменным. Перед взлетом или в полете пилот вертолета 100 может выбирать посредством блока 2 управления пилота характеристики полета, наиболее подходящие для намеченного профиля полета по заданию. Например, пилот может выбирать полет, который минимизирует уровень шума и/или расход топлива за счет рабочих характеристик или максимизирует мощность и скорость полета за счет уровня шума и расхода топлива. В зависимости от выбора, осуществленного пилотом, блок 12 управления скоростью вращения автоматически управляет двигателем 101 соответствующим образом (чтобы увеличивать или уменьшать скорость вращения несущего винта 102 и/или рулевого винта 104), тем самым освобождая пилота от ответственности за принятие критических решений с точки зрения безопасности.
Например, посредством активации блока 6 автоматического управления пилот может выбирать между двумя режимами: один, главным образом сконфигурированный предоставлять приоритет рабочим характеристикам вертолета 100 над низким шумом и/или расходом топлива, и другой, сконфигурированный предоставлять приоритет низкому шуму и экономии топлива. Высокие рабочие характеристики обычно соответствуют высокой скорости вращения винтов 102, 104 вертолета 100, тогда как минимальный шум и экономия топлива достигаются посредством уменьшения скорости вращения винтов 102, 104 в соответствии с окружающими условиями и текущим весом вертолета 100 (в зависимости от нагрузки на взлете). Когда режим полета выбирается, система 1 управления полетом автоматически адаптирует управление скоростью вращения несущего винта 102 и рулевого винта 104 так, что оно в максимально возможной степени соответствует требованию пилота.
Это не только имеет преимущества во время обычной полетной работы вертолета 100, но также и предусматривает более эффективное аварийное управление. Например, в сложных метеорологических условиях, пилоту непрерывно помогает система 1 управления полетом, автоматически регулирующая скорость вращения винтов 102, 104 (например, посредством автоматического увеличения скорости вращения в сложных метеорологических условиях или на очень большой высоте), тем самым повышая уровень безопасности.
Блок 2 управления пилота преимущественно предусматривает выбор, по меньшей мере, четырех рабочих режимов: двух ручных и двух автоматических. Эти два автоматических режима содержат первый автоматический режим с высокими рабочими характеристиками и второй автоматический режим управления полетом с низкими рабочими характеристиками для минимизации шума, расхода топлива и выбросов загрязняющих веществ.
Более конкретно, первый автоматический режим используется для того, чтобы уменьшать усталостное напряжение и увеличивать диапазон режимов полета. Диапазон режимов полета задается на основе базовых рабочих характеристик вертолета 100, в частности приборной скорости полета, калибровка которой является известной, а также на основе окружающих условий, таких как барометрическая высота и температура наружного воздуха.
Эти два ручных режима содержат первый и второй ручной режим.
В первом ручном режиме скорость вращения винта, если не изменена пилотом, фиксируется на значении в процентном отношении, скажем, в 100% от заданной номинальной скорости вращения.
Во втором ручном режиме скорость вращения винта, также если не изменена пилотом, фиксируется на значении в процентном отношении, скажем, в 102%.
В этом контексте ручные рабочие режимы имеют намерение означать рабочие режимы, в которых в рамках полного диапазона режимов полета скорости вращения несущего и рулевого винтов 102, 104 поддерживаются постоянными (100% или 102%) посредством FADEC 8 независимо от параметров полета (температуры, скорости полета, атмосферного давления, веса вертолета, барометрической высоты, высоты по плотности и т.д.). Рабочий диапазон и диапазон крутящих моментов двигателя 101 управляются пилотом, который, предположительно, должен работать так, как задано в справочном руководстве по летной эксплуатации вертолета 100, если вышеуказанные диапазоны превышаются.
Автоматические рабочие режимы, с другой стороны, имеют намерение означать режимы, в которых скорость вращения несущего винта 102 и рулевого винта 104 подчиняется законам управления (сохраненным в запоминающем устройстве 14 блока 12 управления скоростью вращения), которые в течение полета задают оптимальную скорость вращения на основе параметров полета из блока 16 параметров полета. Когда первый или второй автоматический режим активируется, скорость вращения (обороты в минуту - об/мин) винтов 102, 104 варьируется, в противоположность поддержания постоянной.
В зависимости от режима (первого или второго автоматического режима), выбранного пилотом, блок 6 автоматического управления командует блоку 12 управления скоростью вращения отправлять в FADEC 8 значение числа об/мин винта 102, 104, согласованное с выбранным режимом (грубо говоря, высокое число об/мин винта в первом режиме и низкое число об/мин винта во втором режиме).
Блок 12 управления скоростью вращения передает требуемое число об/мин винтов 102, 104 через второй блок 48 интерфейса управления в FADEC 8, который интерпретирует запрос на число об/мин и командует блоку 10 управления двигателем соответственно управлять двигателем 101, чтобы достигать требуемой скорости вращения винтов 102, 104. Из соображений безопасности пилот может всегда вмешиваться вручную посредством активации блока 4 ручного управления, чтобы замещать блок 6 автоматического управления.
Из соображений безопасности первый и второй автоматический режим предпочтительно активируется только тогда, когда вертолет 100 находится на земле (это может быть определено, например, на основе веса, зарегистрированного посредством датчика 20 веса) и если после пуска двигатель 101, приводящий во вращение несущий винт 102 и рулевой винт 104, работает в пределах обычного диапазона режимов (100-102%). Пилот, тем не менее, может по-прежнему выбирать любой режим, даже в полете.
Схема фиг.2 показывает взаимосвязь между первым автоматическим режимом, вторым автоматическим режимом и ручными режимами с точки зрения ограничений управления скоростью вращения винта и рабочих характеристик.
Первый автоматический режим с высокими рабочими характеристиками для достижения максимально возможного диапазона режимов полета представляется посредством области 50. Ручные режимы, которые подчиняются таким ограничениям, как максимальный взлетный вес, представляются совместно посредством области 52, содержащейся полностью в рамках области 50.
Второй автоматический режим с низкими рабочими характеристиками, низким расходом и низким уровнем шума представляется посредством области 54, содержащейся полностью в рамках области 52. Второй автоматический режим, фактически, имеет дополнительные ограничения относительно ручных режимов, например, дополнительные ограничения взлетного веса и ограничения на максимальную скорость вращения винтов и скорость полета.
Фиг.3 показывает схему состояний, иллюстрирующую переключение между двумя автоматическими режимами и двумя ручными режимами, определенными выше в одном варианте осуществления настоящего изобретения. В примере по фиг.3 переключение между состояниями управляется посредством условий, сконфигурированных обеспечивать максимальную безопасность полета, что означает, что не все переходы состояния, а только переходы из состояний с низкими рабочими характеристиками на состояния с высокими рабочими характеристиками разрешаются. Как указано, пилот в случае необходимости может, очевидно, отменять автоматическую систему управления полетом и форсировать переключение из любого одного в любое другое из состояний на фиг.3.
Перед пуском двигателя 101 или на любой скорости до взлета пилот в зависимости от запланированного задания может выбирать любое из следующего: первый автоматический режим (состояние A1), второй автоматический режим (состояние A2), первый ручной режим (состояние M1) и второй ручной режим (состояние M2). Когда выбор осуществлен, вертолет 100 остается в состоянии A1, или A2, или M1, или M2 после взлета, ожидая дополнительной команды от пилота.
Как указано, состояние A2 ограничивается с точки зрения максимальных рабочих характеристик (здесь, предназначенных для того, чтобы означать максимальное число об/мин винтов 102, 104) так, что оно предоставляет приоритет низкому шуму и расходу, и любое изменение скорости вращения винтов 102, 104 является очевидным для пилота. Более конкретно, в случае установившегося прямого горизонтального полета или при висении автоматическое изменение скорости вращения винтов 102, 104, вызываемое посредством факторов внешней среды, не вызывает изменения рабочих характеристик или направления полета, поскольку устройство 42 автопилота активируется и следит за поддержанием устойчивой траектории.
Поскольку состояние A2 является состоянием с низкими рабочими характеристиками, из него можно всегда выходить, чтобы переключаться на другое, с более высокими рабочими характеристиками, автоматическое состояние или на ручное состояние без возникновения каких-либо проблем безопасности. В зависимости от выбора пилота, следовательно, состояние A2 может переключаться на любое из состояний A1, M1, M2.
В состоянии A1 максимальные рабочие характеристики (также предназначенные для того, чтобы означать максимальное число об/мин винтов 102, 104) не ограничены и скорости вращения, реакции и мощности предоставляется приоритет по сравнению с низким шумом и расходом. Поскольку A1 является автоматическим состоянием, любое изменение скорости вращения винтов 102, 104 является очевидным для пилота и устройство 42 автопилота всегда является активным в состоянии A1 и поддерживает устойчивую траекторию независимо от изменения скорости вращения винтов 102, 104.
Поскольку состояние A1 является состоянием максимального диапазона режимов полета, из него нельзя выходить вследствие невозможности других состояний A2, M1, M2 обеспечивать такие же рабочие характеристики и, следовательно, безопасность полета, гарантируемую посредством состояния A1.
В первом ручном режиме M1 скорость вращения винтов 102, 104 задается равной предварительно определенному значению, например 100%, как указано в справочном руководстве по летной эксплуатации (RFM). По усмотрению пилота, тем не менее, предварительно определенное значение может быть изменено, и пилот полностью управляет вертолетом 100. Если нет команды от пилота, скорость вращения винтов 102, 104 не изменяется автоматически наряду с изменением окружающих условий и/или веса вертолета 100 и остается фиксированной на предварительно определенном значении или заданном пилотом значении.
Во втором ручном режиме M2 скорость вращения винтов 102, 104 задается равной предварительно определенному значению, превышающему значение первого ручного режима M1, например 102%, как указано в справочном руководстве по летной эксплуатации (RFM). Второй ручной режим M2 является подходящим, например, при взлете или посадке в ограниченных пространствах, требующих сложного маневрирования пилотом. В этом случае также предварительно определенная скорость вращения винта может быть изменена по усмотрению пилота, и если нет команды от пилота, скорость вращения винтов 102, 104 остается фиксированной.
Состояние M1 может быть переключено пилотом на состояние A1 или M2. Кроме того, пилот может выходить из состояния M2, но в показанном варианте осуществления он может переключаться только на состояние A1 вследствие невозможности других состояний обеспечивать такие же или превосходящие рабочие характеристики по сравнению с состоянием M2.
Фиг.4 показывает схему состояний, аналогичную схеме на фиг.3, относительно дополнительного варианта осуществления настоящего изобретения, на которой те же состояния указываются с использованием тех же ссылок без дополнительного описания. В отличие от схемы на фиг.3 схема состояний фиг.4 предусматривает двунаправленное переключение в и из любого из состояний A1, A2, M1, M2. Переключение из состояния с высокими рабочими характеристиками (например, A1) в состояние с низкими рабочими характеристиками (например, A2), тем не менее, подчиняется одному или более условиям, и только если эти условия удовлетворяются, система 1 управления полетом разрешает переходы состояния с высокими рабочими характеристиками на состояние с низкими рабочими характеристиками. Если даже только одно из условий не удовлетворяется, переключение состояния с высокими рабочими характеристиками на состояние с низкими рабочими характеристиками не разрешено и поддерживается состояние с высокими рабочими характеристиками.
Более конкретно, поскольку оно заключает в себе уменьшение скорости вращения винтов 102, 104, переключение одного из состояний A1, M1, M2 в состояние A2 зависит от веса вертолета 100 (зарегистрированного, как указано, посредством датчика 20 веса и обновляемого в полете на основе расхода топлива, и нагрузок, обнаруженных или потерянных в полете), который должен быть ниже данного предварительно определенного порогового значения, и оценивается относительно скорости полета и высоты.
Переключение состояния A1 с высокими рабочими характеристиками в состояние M1 или M2, безусловно, разрешается, если оно не заключает в себе уменьшение скорости вращения винтов 102, 104.
Наоборот, оно подлежит оценке суммарного веса вертолета 100, аналогично переключению одного из состояний A1, M1, M2 в состояние A2.
В ручных состояниях, в которых пилот полностью управляет вертолетом 100, переключение с состояния M2 в состояние M1 может разрешаться посредством простого определения фактического намерения пилота переключаться. Альтернативно или помимо этого может быть проверен вес вертолета 100 также и переключение разрешено, только если вес ниже предварительно определенного порогового значения.
В дополнительном варианте осуществления (не показан), переключение из состояний с высокими рабочими характеристиками в состояния с более низкими рабочими характеристиками разрешается независимо от соответствия конкретным условиям (таким, как вес вертолета 100), хотя преимущественно может быть предусмотрена мера для предупреждения пилота, оповещающего пилота о том, что определенные условия не удовлетворяются, и оставления на усмотрение пилота решения относительно того, следует или нет переключать состояния.
Диапазон режимов полета, разрешенный в состояниях A1 и A2 (первом и втором автоматическом режиме), разделяется на рабочие зоны, каждая из которых в зависимости от выбранного режима ассоциирована с заданной скоростью вращения винтов 102, 104.
Рабочие зоны сохраняются, например, в базе данных, в свою очередь сохраненной в запоминающих устройствах 14 блока 12 управления скоростью вращения. Для каждого автоматического режима (состояния A1 и A2 на фиг.3 и 4) каждая ячейка хранения соответствующей базы данных однозначно адресуется на основе значения, допускаемого посредством одного или более рассматриваемых параметров, таких как скорость полета и высота, и оценивается совместно.
Фиг.5 показывает в табличной форме базу данных, содержащую значения скорости вращения винта наряду с изменениями высоты, здесь подразумеваемой в качестве высоты по плотности (вертикальная ось), и скорости полета (горизонтальная ось). Более конкретно, таблица на фиг.5 относится к работе винтов 102, 104 во втором автоматическом режиме (состоянии A2 на фиг.3 и 4) так, чтобы предоставлять приоритет низкому шуму и минимальному расходу топлива.
Каждая рабочая зона, указываемая посредством диапазона скоростей полета и посредством диапазона высот по плотности (т.е. каждое поле в таблице), соответствует данной скорости вращения винтов 102, 104.
Как показано на фиг.5, на скоростях полета между минимальным значением Tmin_s, скажем, 0 км/ч и первым значением T1_s, скажем, 93 км/ч и на высотах по плотности между минимальным значением Hmin_s, скажем, примерно -2000 м и первым значением H1_s, скажем, примерно 5000 м, винты 102, 104 приводятся во вращение на скорости вращения в 94%. При поддержании скорости полета между Tmin_s и T1_s, но увеличении высоты по плотности выше первого значения H1_s (но по-прежнему в рамках максимальной разрешенной высоты Hmax_s, скажем, примерно 6000 м), винты 102, 104 приводятся во вращение на большей скорости вращения в 106%. Это необходимо из соображений безопасности, так как для данного допустимого запаса управления относительно низкая скорость полета и разреженный воздух на больших высотах требуют увеличения скорости вращения винтов 102, 104, чтобы удерживать вертолет 100 в полете. Как показано на фиг.5, на больших скоростях полета между первым значением T1_s и вторым значением T2_s, скажем, 200 км/ч и на той же высоте по плотности, как указано выше, винты 102, 104 могут приводиться во вращение на меньшей скорости вращения. Таким образом, на скоростях полета между T1_s и T2_s и на высоте по плотности между Hmin_s и H1_s, винты 102, 104 приводятся во вращение на скорости вращения в 92%; и при поддержании скорости полета в рамках вышеуказанного диапазона и увеличении высоты по плотности между первым значением H1_sи максимальным значением Hmax_s, винты 102, 104 приводятся во вращение на скорости вращения в 95%.
Увеличение скорости полета выше T2_s требует соответствующего увеличения скорости вращения винтов 102, 104. На низких высотах по плотности между минимальным значением Hmin_s и промежуточным значением H2_s, скажем, 2800 м и на скоростях полета между вторым значением T2_s и третьим значением T3_s, скажем, 260 км/ч винты 102, 104 приводятся во вращение на скорости вращения в 96%. На той же высоте по плотности, но на больших скоростях полета вплоть до максимального значения Tmax_s, скажем, 310 км/ч, винты 102, 104 приводятся во вращение на скорости вращения в 100%. На высоких скоростях полета (выше второго значения T2_s) и больших высотах по плотности (выше промежуточного значения H2_s), винты 102, 104 приводятся во вращение на максимальной скорости вращения - 106% в описанном примере.
Шум и расход топлива тем самым могут быть минимизированы на низких скоростях полета и высоте, одновременно гарантируя безопасность и мощность (при необходимости), чтобы достигать высоких скоростей полета и высоты.
Как показано на фиг.5 и в вышеприведенном описании, изменение скорости вращения винтов 102, 104 наряду с изменениями высоты по плотности и/или скорости полета вносится дискретно, с предварительно определенными шагами в отличие от непрерывного.
Очевидно, переключение с одной скорости вращения винтов 102, 104 на другую включает в себя переходную стадию, на которой скорость вращения увеличивается или постепенно снижается до целевого значения в ступенчатом профиле и на которой размер шагов находится в диапазоне 1-10% от диапазона начальных и целевых скоростей вращения.
В одном варианте осуществления настоящего изобретения, изменение скорости вращения винтов 102, 104 может управляться на основе параметров, помимо скорости полета и высоте по плотности, а также на основе окружающих условий.
В другом варианте осуществления настоящего изобретения изменение скорости вращения винтов 102, 104 может управляться на основе параметров, отличных от скорости полета и высоты по плотности, а более конкретно на основе одного, двух или более показателей полета, указывающих скорость полета летательного аппарата, высоту по плотности, барометрическую высоту, вес летательного аппарата, высоту над уровнем земли, ориентацию, направление полета, температуру воздуха, атмосферное давление, метеоусловия и силу и направление ветра.
В одном варианте осуществления настоящего изобретения в дополнение или вместо одного или более вышеприведенных параметров, изменение скорости вращения винтов 102, 104 преимущественно управляется на основе автоматически зарегистрированного или введенного пилотом изменения полетного веса вертолета 100 (потеря веса через расход топлива или увеличение веса людей или веса, поднятого на борт в полете).
Таблица на фиг.5, очевидно, является только примерной и может содержать больше или меньше рабочих зон.
Аналогично фиг.5 фиг.6 показывает в табличной форме другую базу данных, содержащую значения скорости вращения винтов 102, 104 наряду с изменениями высоты, здесь подразумеваемой в качестве высоты по плотности (вертикальная ось), и скорости полета (горизонтальная ось). Более конкретно, таблица на фиг.6 относится к работе винтов 102, 104 в первом автоматическом режиме с высокими рабочими характеристиками (состояние A1 на фиг.3 и 4).
В этом случае также каждая рабочая зона, указываемая посредством диапазона скоростей полета и посредством диапазона высот по плотности (т.е. каждое поле в таблице), соответствует данной скорости вращения винтов 102, 104.
На скоростях полета между минимальным значением Tmin_p, скажем, 0 км/ч и первым значением T1_p, скажем, 93 км/ч и на высотах по плотности между минимальным значением Hmin_p, скажем, примерно -2000 м и первым значением H1_p, скажем, 5000 м, винты 102, 104 приводятся во вращение на скорости вращения в 102%. При поддержании скорости полета между Tmin_p и T1_p, но увеличении высоты по плотности выше первого значения H1_p (но по-прежнему в рамках максимальной разрешенной высоты Hmax_p, скажем, 6000 м), винты 102, 104 приводятся во вращение на большей скорости вращения 106%. На больших скоростях полета между первым значением T1_pи вторым значением T2_p, скажем, 200 км/ч и на той же высоте по плотности, как указано выше, винты 102, 104 могут приводиться во вращение на меньшей скорости вращения. Таким образом, на скоростях полета между T1_p и T2_p и на высоте по плотности между Hmin_p и H1_p винты 102, 104 приводятся во вращение на скорости вращения в 96%; и при поддержании скорости полета в рамках вышеуказанного диапазона и увеличении высоты по плотности до между первым значением H1_pи максимальным значением Hmax_p винты 102, 104 приводятся во вращение на скорости вращения в 100%.
Увеличение скорости полета выше T2_p требует соответствующего увеличения скорости вращения винта. На скоростях полета между вторым значением T2_p и третьим значением T3_p, скажем, 260 км/ч винты 102, 104 приводятся во вращение на скорости вращения в 100% вплоть до первого значения H1_p высоты по плотности и на скорости вращения в 102% выше первого значения H1_p высоты по плотности.
На больших скоростях полета винты 102, 104 приводятся во вращение на скорости вращения в 102% на низких высотах по плотности между минимальным значением Hmin_p и промежуточным значением H2_p, скажем, 2800 м и на скоростях полета между третьим значением T3_p и максимальным значением Tmax_p, скажем, 325 км/ч. На скоростях полета в рамках того же диапазона, но на больших высотах по плотности между H2_pи H1_p винты 102, 104 приводятся во вращение на скорости вращения в 104%. На еще больших высотах по плотности между H1_p и максимальным значением Hmax_p, винты 102, 104 приводятся во вращение на максимальной скорости вращения, которая составляет 106% в описанном примере.
Аналогично фиг.5, таблица на фиг.6 может содержать больше или меньше рабочих зон, и изменение скорости вращения винтов 102, 104 может управляться на основе параметров, помимо скорости полета и высоте по плотности, и также на основе окружающих условий. Например, изменение скорости вращения винтов 102, 104 может управляться на основе параметров, отличных от скорости полета и высоты по плотности, а более конкретно на основе одного, двух или более показателей полета, указывающих скорость полета летательного аппарата, высоту по плотности, барометрическую высоту, вес летательного аппарата, высоту над уровнем земли, ориентацию, направление полета, температуру воздуха, атмосферное давление, метеоусловия и силу и направление ветра, или на основе изменения веса вертолета 100, зарегистрированного в полете или введенного пилотом.
Как показано на фиг.6 и указано со ссылкой на фиг.5, изменение скорости вращения винтов 102, 104 наряду с изменениями высоты по плотности и/или скорости полета выполняется дискретно с предварительно определенными шагами в отличие от непрерывного. Очевидно, в этом случае также переключение с одной скорости вращения винтов 102, 104 на другую включает в себя переходную стадию, на которой скорость вращения увеличивается или снижается постепенно до целевого значения в ступенчатом профиле и на которой размер шагов находится в диапазоне 1-10% от диапазона начальных и целевых скоростей вращения.
В отношении обеих фиг.5 и 6 параметры полета и информацию об условиях окружающей среды предпочтительно получают с фиксированными, предварительно определенными временными интервалами. Из соображений безопасности автоматическое переключение из одной рабочей зоны в другую (рабочие зоны показаны на фиг.5 и 6) подлежит проверкам соответствия, таким как определение высоты по плотности, расстояния до земли, температуры, скорости полета, текущей скорости вращения винтов 102, 104 и на основе полученной информации и параметров целевой скорости вращения винтов 102, 104 и непрерывности условий высоты по плотности и скорости полета в течение заданного периода времени.
Результат вышеуказанной регистрации данных должен быть оценен относительно соответствующих диапазонов допуска и градиентов изменения во времени, чтобы не допускать толчков автоматической системы на нестабильных, переходных стадиях полета.
Переключение с одной рабочей зоны на другую (т.е. с одной скорости вращения винта на другую, как показано в таблицах 5 и 6) осуществляется постепенно с предварительно определенными шагами, например посредством регулирования скорости вращения винта на ±1% в секунду для изменения скорости до 5% и на ±2% в секунду для изменения скорости более чем на 5%. С учетом начальной скорости вращения и заданной скорости вращения винтов 102, 104 скорость вращения винтов 102, 104 остается между начальной и целевой скоростью вращения только на период времени, который требуется, чтобы увеличивать или уменьшать скорость вращения винтов 102, 104.
В случае быстрого рассогласования скорости вращения винта и числа оборотов двигателя (к примеру, при переходе к авторотации) должно быть обеспечено стабильное управление винтами, чтобы предоставлять возможность его адаптирования к изменениям скорости вращения, вызываемым посредством внешних условий, даже при нулевой мощности (полет на режиме малого газа). Фиг.7 показывает вертолет 100, содержащий несущий винт 102 и рулевой винт 104, приводимые во вращение посредством соответствующих двигателей или одного двигателя (только один двигатель 101 показан на фиг 7); и систему 1 управления полетом, как описано и проиллюстрировано на фиг.1-6.
Альтернативно, вертолет 100 на фиг.7 может быть вертолетом одновинтового типа.
Преимущества настоящего изобретения должны быть очевидными из вышеприведенного описания.
В частности, система согласно изобретению комбинирует эксплуатационную гибкость и адаптируемость. Эксплуатационная гибкость заключается в том, что пилот может выбирать все характеристики летательного аппарата, наиболее подходящие для профиля полета по заданию; а адаптируемость заключается в том, что, когда один из автоматических режимов полета выбирается, летательный аппарат автоматически адаптирует скорость вращения винта к текущим окружающим условиям, тем самым освобождая пилота от необходимости постоянно отслеживать скорость вращения винта в зависимости от параметров окружающей среды, в частности, в критических полетных условиях, тем самым значительно повышая безопасность полета.
Безусловно, изменения могут вноситься в систему, как описано и проиллюстрировано в данном документе, тем не менее, без отступления от объема настоящего изобретения, как задано в прилагаемой формуле изобретения.
Реферат
Изобретение относится к области авиации, в частности к системам управления летательными аппаратами. Электронная система (1) управления полетом летательного аппарата (100), выполненного с возможностью висения и имеющего, по меньшей мере, один винт (102; 104), выполнена с возможностью работать в ручном режиме управления полетом и в двух автоматических режимах управления полетом, соответствующих режимам полета летательного аппарата. В ручном режиме система (1) управления полетом управляет скоростью вращения винта в ответ на прямые команды от пилота. В автоматических режимах работы система (1) управления полетом автоматически управляет скоростью вращения винта на основе условий полета. Система (1) управления полетом выполнена с возможностью запоминать для каждого автоматического режима управления полетом соответствующую таблицу полета, связывающую различные значения скорости вращения винта с различными значениями, по меньшей мере, одного показателя полета и автоматически управлять скоростью вращения винта в автоматических режимах управления полетом на основе соответствующих таблиц полета. Обеспечивается безопасное автоматическое управление скоростью вращения одного или более винтов летательного аппарата. 2 н. и 9 з.п. ф-лы, 7 ил.
Формула
- ручном режиме управления полетом, в котором система (1) управления полетом управляет скоростью вращения винта в ответ на прямые команды от пилота; и
- по меньшей мере, в двух автоматических режимах управления полетом, соответствующих соответствующим режимам полета летательного аппарата, в которых система (1) управления полетом автоматически управляет скоростью вращения винта на основе условий полета;
причем система (1) управления полетом отличается также тем, что она выполнена с возможностью:
- запоминать для каждого из упомянутых автоматических режимов управления полетом соответствующую таблицу полета, связывающую различные значения скорости вращения упомянутого винта с различными значениями, по меньшей мере, одного показателя полета; и
- автоматически управлять скоростью вращения винта в упомянутых автоматических режимах управления полетом на основе соответствующих таблиц полета.
- режиме полета с низким уровнем шума и/или низким расходом топлива; и
- режиме полета с высокими рабочими характеристиками.
Документы, цитированные в отчёте о поиске
Устройство и способ регулирования мощности силовой установки приведения в движение несущего винта вертолета
Комментарии