Способ задания маршрута и устройство задания маршрута - RU2719117C1
Код документа: RU2719117C1
Чертежи









Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу задания маршрута и к устройству задания маршрута.
Уровень техники
[0002] Чтобы уменьшать нагрузку водителя во время автономного вождения, когда рассматриваемое транспортное средство едет за едущим впереди транспортным средством, предусмотрена технология для того, чтобы вычислять пути движения едущего впереди транспортного средства, движущегося по полосе движения, идентичной полосе движения рассматриваемого транспортного средства, и пути движения другого транспортного средства, движущегося рядом по другой полосе движения, с тем чтобы определять то, являются или нет пути движения едущего впереди транспортного средства параллельными путям движения другого транспортного средства, движущегося рядом. Технология управляет рассматриваемым транспортным средством таким образом, чтобы следовать по путям движения едущего впереди транспортного средства, когда соответствующие пути движения едущего впереди транспортного средства и другого транспортного средства определяются как параллельные между собой (см. патентный документ 1).
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Не прошедшая экспертизу патентная публикация Японии номер 2004-322916
Сущность изобретения
Техническая задача
[0004] Тем не менее, технология, раскрытая в патентном документе 1, не позволяет поддерживать постоянное управление движением в режиме следования, когда едущее впереди транспортное средство, к примеру, двухколесное транспортное средство, отклоняется вправо и влево, например, поскольку отклоняющееся транспортное средство определяется как не параллельное другому транспортному средству, движущемуся рядом. Хотя ослабление условий для определения параллельного движения может обеспечивать возможность управления движением в режиме следования, когда едущее впереди транспортное средство отклоняется, рассматриваемое транспортное средство также может отклоняться и двигаться нестабильно.
[0005] В ответ на вышеизложенную проблему, задача настоящего изобретения заключается в том, чтобы предоставлять способ задания маршрута и устройство задания маршрута, допускающие инструктирование рассматриваемому транспортному средству непрерывно следовать по путям движения других транспортных средств, включающих в себя едущее впереди транспортное средство, таким образом, чтобы двигаться стабильно.
Решение задачи
[0006] Аспект настоящего изобретения предоставляет способ задания маршрута и устройство задания маршрута, выполненные с возможностью обнаруживать позиции других транспортных средств, движущихся около рассматриваемого транспортного средства, и задавать маршрут рассматриваемого транспортного средства согласно путям движения других транспортных средств на основе предысторий позиций других транспортных средств. Способ и устройство дополнительно выполнены с возможностью вычислять величину смещения путей движения едущего впереди транспортного средства, указываемого из других транспортных средств, и задавать маршрут рассматриваемого транспортного средства согласно путям движения другого транспортного средства, отличающегося от едущего впереди транспортного средства, когда величина смещения путей движения едущего впереди транспортного средства составляет предварительно определенное пороговое значение или больше.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей устройство задания маршрута согласно варианту осуществления настоящего изобретения;
Фиг. 2 является принципиальной схемой, иллюстрирующей ситуацию при движении согласно варианту осуществления настоящего изобретения;
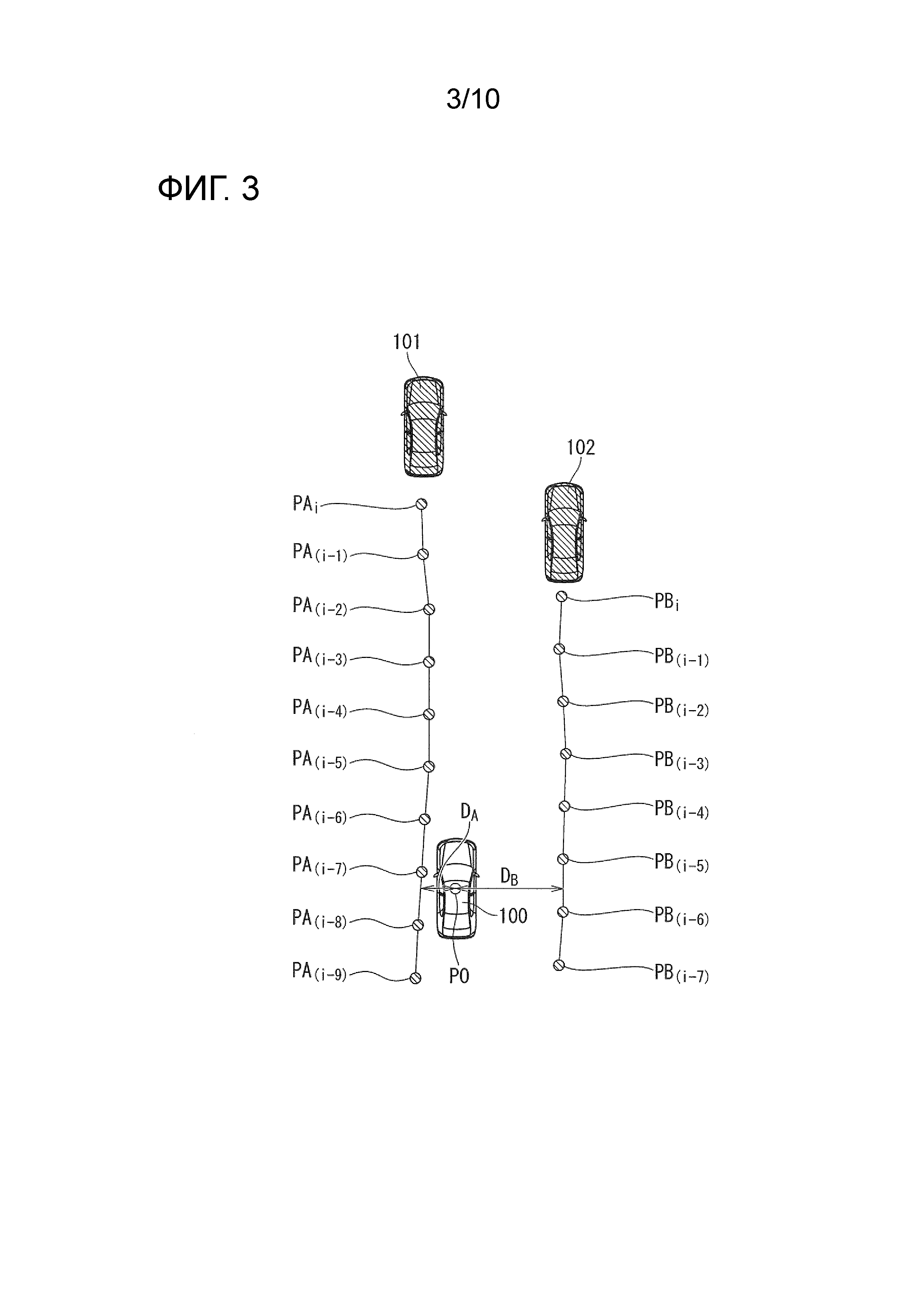
Фиг. 3 является принципиальной схемой, иллюстрирующей процесс определения полос движения других транспортных средств согласно варианту осуществления настоящего изобретения;
Фиг. 4 является принципиальной схемой, иллюстрирующей процесс оценки путей движения едущего впереди транспортного средства согласно варианту осуществления настоящего изобретения;
Фиг. 5 является принципиальной схемой, иллюстрирующей процесс задания интервала оценки согласно варианту осуществления настоящего изобретения;
Фиг. 6 является принципиальной схемой, иллюстрирующей процесс задания маршрута рассматриваемого транспортного средства согласно варианту осуществления настоящего изобретения;
Фиг. 7 является принципиальной схемой, иллюстрирующей другой процесс задания маршрута рассматриваемого транспортного средства согласно варианту осуществления настоящего изобретения;
Фиг. 8 является блок-схемой последовательности операций, иллюстрирующей способ задания маршрута согласно варианту осуществления настоящего изобретения;
Фиг. 9 является принципиальной схемой, иллюстрирующей процесс оценки путей движения другого транспортного средства согласно первому модифицированному примеру варианта осуществления настоящего изобретения; и
Фиг. 10 является блок-схемой последовательности операций, иллюстрирующей способ задания маршрута согласно второму модифицированному примеру варианта осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0009] В дальнейшем в этом документе описывается вариант осуществления согласно настоящему изобретению со ссылкой на чертежи. В нижеприведенных описаниях чертежей, идентичные или аналогичные элементы указываются посредством идентичных или аналогичных ссылок с номерами. Следует понимать, что чертежи проиллюстрированы схематично, и взаимосвязи толщин и плоских размеров, а также количественные отношения соответствующих толщин не нарисованы в масштабе. Также следует понимать, что взаимосвязи или количественные отношения размеров между соответствующими чертежами могут отличаться друг от друга. Вариант осуществления, описанный ниже, иллюстрирует устройство и способ для осуществления технических идей настоящего изобретения, и технические идеи настоящего изобретения не имеют намерение быть ограниченными материалами, формами, конструкциями или компоновками элементов, как описано в данном документе. Технические идеи настоящего изобретения должны охватывать различные модификации, попадающие в пределы объема изобретения, заданного посредством прилагаемой формулы изобретения.
[0010] Устройство задания маршрута согласно варианту осуществления может устанавливаться в транспортном средстве (в дальнейшем в этом документе, транспортное средство, оснащенное устройством задания маршрута согласно варианту осуществления настоящего изобретения, упоминается как "рассматриваемое транспортное средство"). Как проиллюстрировано на фиг. 1, устройство задания маршрута согласно варианту осуществления включает в себя устройство 1 управления, датчик 2 периферийных транспортных средств и датчик 3 информации касательно транспортного средства.
[0011] Датчик 2 периферийных транспортных средств обнаруживает позиции, включающие в себя расстояния и направления других транспортных средств, таких как едущее впереди транспортное средство, движущееся около рассматриваемого транспортного средства, и выводит информацию относительно позиций обнаруженных других транспортных средств в устройство 1 управления. Датчик 2 периферийных транспортных средств может представлять собой радар миллиметрового диапазона, лазерный радар, лазерный дальномер (LRF) или камеру. Тип, число и позиция установки датчика 2 периферийных транспортных средств могут варьироваться надлежащим образом.
[0012] Датчик 3 информации касательно транспортного средства обнаруживает информацию касательно транспортного средства (информацию одометрии), включающую в себя условия движения рассматриваемого транспортного средства. Датчик 3 информации касательно транспортного средства включает в себя датчик 4 скорости вращения колес и датчик 5 угловой скорости рыскания. Датчик 4 скорости вращения колес определяет скорость вращения колес рассматриваемого транспортного средства и выводит информацию относительно определенной скорости вращения колес в устройство 1 управления. Датчик 5 угловой скорости рыскания определяет темп изменения угла рыскания (угловую скорость рыскания) рассматриваемого транспортного средства и выводит информацию относительно определенной угловой скорости рыскания в устройство 1 управления.
[0013] Устройство 1 управления представляет собой контроллер, такой как электронный модуль управления (ECU), и включает в себя процессор и устройство хранения данных. Процессор может представлять собой компьютер, включающий в себя центральный процессор (CPU), основное устройство хранения данных, устройство ввода-вывода, интерфейс ввода-вывода и шину данных, либо полупроводниковую интегральную схему, эквивалентную компьютеру. Когда процессор представляет собой полупроводниковую интегральную схему, полупроводниковая интегральная схема может включать в себя программируемое логическое устройство (PLD), такое как программируемая пользователем вентильная матрица (FPGA). Альтернативно, процессор может включать в себя функциональную логическую схему или логический блок, размещаемый в полупроводниковой интегральной схеме общего назначения. Устройство хранения данных может представлять собой любое из полупроводникового устройства хранения данных, магнитного устройства хранения данных и оптического устройства хранения данных и может включать в себя регистр и кэш-память.
[0014] Устройство 1 управления включает в себя модуль 11 вычисления величины перемещения, модуль 12 вычисления путей движения и модуль 13 задания маршрута в качестве логических аппаратных источников. Модуль 11 вычисления величины перемещения вычисляет величину (ΔX, ΔY, Δφ) перемещения рассматриваемого транспортного средства в соответствии со скоростью вращения колес, определенной посредством датчика 4 скорости вращения колес, и информацией касательно транспортного средства (информацией одометрии), такой как угловая скорость рыскания, определенная посредством датчика 5 угловой скорости рыскания. При использовании в данном документе, символ ΔX представляет величину перемещения в пространстве в направлении ширины транспортного средства для рассматриваемого транспортного средства, символ ΔY представляет величину перемещения в пространстве в направлении спереди назад, перпендикулярном к направлению ширины транспортного средства для рассматриваемого транспортного средства, и символ Δφ представляет величину вращения.
[0015] Модуль 12 вычисления путей движения вычисляет пути движения другого транспортного средства на основе предыстории позиций другого транспортного средства (во временных рядах) в соответствии с величиной (ΔX, ΔY, Δφ) перемещения рассматриваемого транспортного средства, вычисленной посредством модуля 11 вычисления величины перемещения, и информацией относительно позиций другого транспортного средства, обнаруженной посредством датчика 2 периферийных транспортных средств. Например, модуль 12 вычисления путей движения извлекает другое транспортное средство, присутствующее в пределах предварительно определенного расстояния относительно рассматриваемого транспортного средства в направлении вперед, направлении спереди направо и направлении спереди налево рассматриваемого транспортного средства, и вычисляет пути движения извлеченного другого транспортного средства. Предварительно определенное расстояние может определяться надлежащим образом в пределах диапазона, в котором рассматриваемое транспортное средство может ехать за другим транспортным средством. Когда датчик 2 периферийных транспортных средств обнаруживает множество других транспортных средств, модуль 12 вычисления путей движения вычисляет пути движения каждого транспортного средства, соответственно.
[0016] Например, модуль 12 вычисления путей движения последовательно сохраняет, в устройстве хранения данных устройства 1 управления, центральную позицию в заднем фрагменте другого транспортного средства в качестве позиции (опорной точки) другого транспортного средства на основе результата обнаружения датчика 2 периферийных транспортных средств. Модуль 12 вычисления путей движения считывает, из устройства хранения данных устройства 1 управления, предысторию позиций (опорных точек) другого транспортного средства, сохраненную посредством предыдущего периода обработки, и обратно перемещает позиции посредством величины (ΔX, ΔY, Δφ) перемещения рассматриваемого транспортного средства, с тем чтобы обновлять предысторию позиций другого транспортного средства, сохраненную посредством предыдущего периода обработки. Модуль 12 вычисления путей движения добавляет позицию другого транспортного средства, обнаруженную в текущем периоде обработки, в обновленную предысторию позиций другого транспортного средства, сохраненную посредством предыдущего периода обработки, с тем чтобы получать предысторию позиций другого транспортного средства, сохраненную посредством текущего периода обработки, в качестве путей движения другого транспортного средства. Аппроксимирующая дуга может вычисляться, например, как пути движения другого транспортного средства таким образом, что предыстории позиций другого транспортного средства инструктируется аппроксимироваться дугой.
[0017] Обработка вычисления путей движения других транспортных средств посредством модуля 12 вычисления путей движения проиллюстрирована со ссылкой на фиг. 2. Рассматриваемое транспортное средство 100 движется по левой полосе L1 движения дороги с двумя полосами L1 и L2 движения в одном направлении. Другое транспортное средство 101 (едущее впереди транспортное средство) движется впереди рассматриваемого транспортного средства 100 по полосе L1 движения, идентичной полосе L1 движения рассматриваемого транспортного средства 100. Еще одно другое транспортное средство 102 движется с передней правой стороны рассматриваемого транспортного средства 100 по правой полосе L2 движения.
[0018] Модуль 12 вычисления путей движения считывает, из устройства хранения данных устройства 1 управления, позиции PA(i-1), PA(i-2), PA(i-3), PA(i-4), PA(i-5) и PA(i-6) едущего впереди транспортного средства 101, сохраненного посредством предыдущего периода обработки, и обратно перемещает позиции посредством величины (ΔX, ΔY, Δφ) перемещения рассматриваемого транспортного средства 100, с тем чтобы обновлять позиции PA(i-1)- PA(i-6) едущего впереди транспортного средства 101. Модуль 12 вычисления путей движения добавляет позицию PAi едущего впереди транспортного средства 101, обнаруженную посредством датчика 2 периферийных транспортных средств в текущем периоде обработки, в обновленные позиции PA(i-1))-PA(i-6) едущего впереди транспортного средства 101, с тем чтобы получать пути PAi-PA(i-6) движения едущего впереди транспортного средства 101.
[0019] Модуль 12 вычисления путей движения также считывает, из устройства хранения данных устройства 1 управления, позиции PB(i-1), PB(i-2), PB(i-3), PB(i-4), PB(i-5), PB(i-6), PB(i-7), PB(i-8), PB(i-9), PB(i-10) и PB(i-11) другого транспортного средства 102, сохраненные посредством предыдущего периода обработки, и обратно обновите позиции PB(i-1)-PB(i-11) другого транспортного средства 102 посредством величины (ΔX, ΔY, Δφ) перемещения рассматриваемого транспортного средства 100. Модуль 12 вычисления путей движения добавляет позицию PBi другого транспортного средства 102, обнаруженную посредством датчика 2 периферийных транспортных средств в текущем периоде обработки, в обновленные позиции PB(i-1)-PB(i-11) другого транспортного средства 102, с тем чтобы получать пути PBi-PB(i-11) движения другого транспортного средства 102.
[0020] Модуль 13 задания маршрута, проиллюстрированный на фиг. 1, задает маршрут рассматриваемого транспортного средства согласно путям движения других транспортных средств, вычисленным посредством модуля 12 вычисления путей движения. Модуль 13 задания маршрута включает в себя схему 14 оценки путей движения и схему 15 задания маршрута в качестве логических аппаратных источников. Схема 14 оценки путей движения указывает другие транспортные средства, движущиеся по полосе движения, идентичной полосе движения рассматриваемого транспортного средства (определяет то, движутся или нет другие транспортные средства по полосе движения, идентичной полосе движения рассматриваемого транспортного средства), в соответствии с путями движения других транспортных средств, вычисленными посредством модуля 12 вычисления путей движения.
[0021] Например, схема 14 оценки путей движения вычисляет расстояние между рассматриваемым транспортным средством и путями движения другого транспортного средства, вычисленными посредством модуля 12 вычисления путей движения, и определяет то, что другое транспортное средство движется по полосе движения, идентичной полосе движения рассматриваемого транспортного средства, когда вычисленное расстояние меньше предварительно определенного порогового значения (например, 2,0 метра). Схема 14 оценки путей движения определяет то, что другое транспортное средство не движется по полосе движения, идентичной полосе движения рассматриваемого транспортного средства (определяет то, что другое транспортное средство движется по другой полосе движения относительно рассматриваемого транспортного средства), когда вычисленное расстояние составляет предварительно определенное пороговое значение (например, 2,0 метра) или больше. Предварительно определенное пороговое значение может задаваться надлежащим образом, например, в зависимости от ширины полосы движения.
[0022] В качестве конкретного примера, фиг. 3 иллюстрирует случай, в котором пути PAi-PA(i-9) движения транспортного средства 101 и пути PBi-PB(i-7) движения другого транспортного средства 102 вычисляются посредством модуля 12 вычисления путей движения. Схема 14 оценки путей движения вычисляет расстояние DA в направлении ширины транспортного средства для рассматриваемого транспортного средства 100 между центром P0 тяжести рассматриваемого транспортного средства 100 и, например, аппроксимированной кривой путей PAi-PA(i-9) движения транспортного средства 101. В этом примере, расстояние DA меньше предварительно определенного порогового значения (например, 2,0 метра), и транспортное средство 101 в силу этого определяется как движущееся по той же полосе L1 движения. Схема 14 оценки путей движения также вычисляет расстояние DB в направлении ширины транспортного средства для рассматриваемого транспортного средства 100 между центром P0 тяжести рассматриваемого транспортного средства 100 и, например, аппроксимированной кривой путей PBi-PB(i-7) движения другого транспортного средства 102. В этом примере, расстояние DB составляет предварительно определенное пороговое значение (например, 2,0 метра) или больше, и другое транспортное средство 102 в силу этого определяется как не движущееся по той же полосе L1 движения (определяется как движущееся по другой полосе L2 движения).
[0023] Схема 14 оценки путей движения дополнительно указывает транспортное средство, в качестве едущего впереди транспортного средства, движущегося впереди рассматриваемого транспортного средства и ближайшего к рассматриваемому транспортному средству из других транспортных средств, которые определяются как движущиеся по той же полосе движения. Когда датчик 2 периферийных транспортных средств может обнаруживать следующее едущее впереди транспортное средство, движущееся впереди едущего впереди транспортного средства, схема 14 оценки путей движения указывает транспортное средство, движущееся впереди рассматриваемого транспортного средства и второе ближайшее к рассматриваемому транспортному средству, в качестве следующего едущего впереди транспортного средства из других транспортных средств, которые определяются как движущиеся по той же полосе движения.
[0024] Схема 14 оценки путей движения оценивает пути движения других транспортных средств, вычисленные посредством модуля 12 вычисления путей движения. Например, схема 14 оценки путей движения вычисляет величины смещения путей движения других транспортных средств, полученных посредством модуля 12 вычисления путей движения, в направлении вправо и влево (в направлении ширины транспортного средства или в направлении, перпендикулярном полосе движения) в пределах предварительно определенного интервала оценки, и выводит вычисленные величины смещения в качестве результатов оценки. Например, как проиллюстрировано на фиг. 4, едущее впереди транспортное средство 101 (двухколесное транспортное средство) и другое транспортное средство 102 предположительно присутствуют. Схема 14 оценки путей движения задает интервал I1 оценки от позиции едущего впереди транспортного средства 101 до позиции, удаленной сзади на предварительно определенное расстояние (например, 100 метров). Интервал I1 оценки может задаваться надлежащим образом, например, в зависимости от позиции и относительной скорости едущего впереди транспортного средства 101 и скорости рассматриваемого транспортного средства 100.
[0025] Схема 14 оценки путей движения инструктирует путям PAi-PA(i-8) движения едущего впереди транспортного средства 101 в пределах интервала I1 оценки аппроксимироваться прямой линией и разделяет аппроксимированный интервал на секции, когда расстояние между аппроксимированной прямой линией и соответствующими путями PAi-PA(i-8) движения составляет предварительно определенное пороговое значение (например, 0,2 метра) или более таким образом, что расстояние между аппроксимированной прямой линией и соответствующими путями PAi-PA(i-8) движения приводит к значению, меньшему предварительно определенного порогового значения (например, 0,2 метра). Фиг. 4 иллюстрирует случай, в котором пути PAi-PA(i-8) движения едущего впереди транспортного средства 101 разделяются на пять аппроксимированных интервалов IA1-IA5, соответствующих пяти аппроксимированным прямым линиям, указываемым посредством пунктирных линий таким образом, что разделенное число, которое равно пяти, вычисляется как величина смещения (результат оценки) путей PAi-PA(i-8) движения едущего впереди транспортного средства 101.
[0026] Когда другое транспортное средство 102 расположено впереди едущего впереди транспортного средства 101, как проиллюстрировано на фиг. 4, интервал I1 оценки едущего впереди транспортного средства 101 также используется для оценки путей PBi-PB(i-12) движения другого транспортного средства 102. Схема 14 оценки путей движения инструктирует путям PB(i-4)-PB(i-11) движения другого транспортного средства 102 в пределах интервала I1 оценки аппроксимироваться прямой линией и разделяет аппроксимированный интервал на секции, когда расстояние между аппроксимированной прямой линией и соответствующими путями PB(i-4)-PB(i-11) движения составляет предварительно определенное пороговое значение (например, 0,2 метра) или более таким образом, что расстояние между аппроксимированной прямой линией и соответствующими путями PB(i-4)-PB(i-11) движения приводит к значению, меньшему предварительно определенного порогового значения (например, 0,2 метра). Фиг. 4 иллюстрирует случай, в котором пути PB(i-4)-PB(i-11) движения другого транспортного средства 102 не разделяются, чтобы получать один аппроксимированный интервал IB1, соответствующий одной аппроксимированной дуге, указываемой посредством сплошной линии таким образом, что разделенное число, которое равно единице, вычисляется как величина смещения (результат оценки) путей PB(i-4)-PB(i-11) движения другого транспортного средства 102.
[0027] Когда другое транспортное средство 102 расположено сзади едущего впереди транспортного средства 101, как проиллюстрировано на фиг. 5, схема 14 оценки путей движения задает интервал I2 оценки от позиции другого транспортного средства 102 до позиции, удаленной сзади на предварительно определенное расстояние (например, 100 метров), независимо от интервала I1 оценки для едущего впереди транспортного средства 101. Схема 14 оценки путей движения затем оценивает пути PBi-PB(i-7) движения другого транспортного средства 102 в пределах интервала I2 оценки.
[0028] Схема 15 задания маршрута задает маршрут рассматриваемого транспортного средства согласно результатам оценки путей движения других транспортных средств, оцененных посредством схемы 14 оценки путей движения. Например, схема 15 задания маршрута определяет то, составляет или нет величина смещения путей движения каждого транспортного средства, вычисленная посредством схемы 14 оценки путей движения, предварительно определенное пороговое значение или больше. Например, как проиллюстрировано на фиг. 4, когда разделенное число равно пяти, полученному в качестве величины смещения путей PAi-PA(i-8) движения едущего впереди транспортного средства 101, и предварительно определенное пороговое значение, заданное для разделенного числа, равно трем, величина смещения путей PAi-PA(i-8) движения едущего впереди транспортного средства 101 определяется как составляющая предварительно определенное пороговое значение или больше. Когда разделенное число равно единице, полученной в качестве величины смещения путей PB(i-4)-PB(i-11) движения другого транспортного средства 102, и предварительно определенное пороговое значение, заданное для разделенного числа, равно трем, величина смещения путей PB(i-4)-PB(i-11) движения другого транспортного средства 102 определяется так, чтобы быть меньше, чем предварительно определенное пороговое значение. Предварительно определенное пороговое значение может задаваться надлежащим образом, например, в зависимости от способа оценки посредством схемы 14 оценки путей движения.
[0029] Когда величина смещения путей движения едущего впереди транспортного средства меньше предварительно определенного порогового значения, пути движения едущего впереди транспортного средства предполагаются стабильными без отклонения вправо и влево и в силу этого соответствующими в качестве цели для следования для рассматриваемого транспортного средства. Схема 15 задания маршрута за счет этого выбирает пути движения едущего впереди транспортного средства в качестве цели для следования для рассматриваемого транспортного средства (в качестве основы для задания маршрута рассматриваемого транспортного средства). Когда величина смещения путей движения едущего впереди транспортного средства составляет предварительно определенное пороговое значение или больше, пути движения едущего впереди транспортного средства предполагаются нестабильными вследствие отклонения вправо и влево и в силу этого несоответствующими в качестве цели для следования для рассматриваемого транспортного средства. Схема 15 задания маршрута затем исключает пути движения едущего впереди транспортного средства из цели для следования для рассматриваемого транспортного средства и дополнительно выполняет путей движения другого транспортного средства, отличного от едущего впереди транспортного средства, в качестве цели для следования.
[0030] Когда величина смещения путей движения едущего впереди транспортного средства, движущегося по полосе движения, идентичной полосе движения рассматриваемого транспортного средства, составляет предварительно определенное пороговое значение или больше, схема 15 задания маршрута выполняет поиск путей движения другого транспортного средства, отличного от едущего впереди транспортного средства, в качестве цели для следования для рассматриваемого транспортного средства (в качестве основы для задания маршрута рассматриваемого транспортного средства), и предпочтительно выбирает пути движения другого транспортного средства, такого как следующее едущее впереди транспортное средство, движущееся по полосе движения, идентичной полосе движения рассматриваемого транспортного средства, вместо едущего впереди транспортного средства. Когда величина смещения путей движения другого транспортного средства, движущегося по той же полосе движения, приводит к предварительно определенному пороговому значению или более после выбора, схема 15 задания маршрута снова выполняет поиск путей движения еще одного другого транспортного средства, по-прежнему не выбранного в качестве цели для следования для рассматриваемого транспортного средства.
[0031] Например, как проиллюстрировано на фиг. 6, когда следующее едущее впереди транспортное средство 102 представляет собой крупногабаритное транспортное средство, датчик 2 периферийных транспортных средств может обнаруживать как едущее впереди транспортное средство 101, так и следующее едущего впереди транспортное средство 102 в большинстве случаев. Датчик 2 периферийных транспортных средств также может обнаруживать следующее едущее впереди транспортное средство 102, когда едущее впереди транспортное средство 101 представляет собой двухколесное транспортное средство. Когда еще одно другое транспортное средство впереди следующего едущего впереди транспортного средства 102 может обнаруживаться, например, когда едущее впереди транспортное средство 101 и следующее едущее впереди транспортное средство 102 представляют собой двухколесные транспортные средства, другое транспортное средство может задаваться в качестве цели для следования для рассматриваемого транспортного средства. Когда предусмотрены пути движения нескольких транспортных средств, движущихся по той же полосе движения, так что рассматриваемое транспортное средство может ехать не за едущим впереди транспортным средством, сначала может выбираться транспортное средство ближе к рассматриваемому транспортному средству, такое как следующее едущее впереди транспортное средство.
[0032] Когда величина смещения путей движения другого транспортного средства, такого как едущее впереди транспортное средство или следующее едущее впереди транспортное средство, движущееся по полосе движения, идентичной полосе движения рассматриваемого транспортного средства, составляет предварительно определенное пороговое значение или больше, схема 15 задания маршрута выполняет поиск путей движения другого транспортного средства, движущегося по другой полосе движения относительно рассматриваемого транспортного средства, в качестве цели для следования. Когда величина смещения путей движения другого транспортного средства, движущегося по другой полосе движения, меньше предварительно определенного порогового значения, схема 15 задания маршрута выбирает пути движения другого транспортного средства, движущегося по другой полосе движения, в качестве цели для следования. Когда предусмотрены пути движения нескольких транспортных средств, движущихся по полосе движения, отличной от полосы движения, по которой может следовать рассматриваемое транспортное средство, сначала может выбираться транспортное средство, относительно близкое к рассматриваемому транспортному средству.
[0033] Схема 15 задания маршрута задает маршрут рассматриваемого транспортного средства согласно путям движения другого транспортного средства, выбранного в качестве цели для следования. Например, как проиллюстрировано на фиг. 6, когда пути PAi-PA(i-8) движения едущего впереди транспортного средства 101 или пути PBi-PB(i-12) движения следующего едущего впереди транспортного средства 102, движущегося по полосе L1 движения, идентичной полосе L1 движения рассматриваемого транспортного средства 100, выбираются в качестве цели для следования, схема 15 задания маршрута задает пути PAi-PA(i-8) движения едущего впереди транспортного средства 101 или пути PBi-PB(i-12) движения следующего едущего впереди транспортного средства 102 непосредственно в качестве маршрута рассматриваемого транспортного средства 100. Альтернативно, смещенные пути движения могут определяться в качестве маршрута рассматриваемого транспортного средства 100, полученной таким образом, что пути PAi-PA(i-8) движения едущего впереди транспортного средства 101 или пути PBi-PB(i-12) движения следующего едущего впереди транспортного средства 102 смещаются к рассматриваемому транспортному средству 100 на расстояние между едущим впереди транспортным средством 101 или следующим едущим впереди транспортным средством 102 и рассматриваемым транспортным средством 100 в направлении ширины транспортного средства, ранее вычисленное во время обработки определения полосы движения для едущего впереди транспортного средства 101 или следующего едущего впереди транспортного средства 102.
[0034] Когда пути PBi-PB(i-7) движения другого транспортного средства 102, движущегося по другой полосе L2 движения, выбираются в качестве цели для следования, как проиллюстрировано на фиг. 7, пути PBi-PB(i-7) движения другого транспортного средства 102 смещаются к рассматриваемому транспортному средству 100 (в направлении влево) на расстояние DB между рассматриваемым транспортным средством 100 и путями PBi-PB(i-7) движения другого транспортного средства 102, ранее вычисленным во время обработки определения полосы движения для другого транспортного средства 102. Смещенные пути PCi-PC(i-7) движения затем задаются в качестве маршрута рассматриваемого транспортного средства 100.
[0035] Модуль 16 управления транспортного средства выводит, в различные типы актуаторов, управляющие сигналы для выполнения операций помощи при вождении или автономного вождения рассматриваемого транспортного средства, таких как управление ускорением или замедлением, управление торможением или управление рулением таким образом, что рассматриваемое транспортное средство движется по маршрута, заданной посредством схемы 15 задания маршрута.
[0036] Способ задания маршрута
В дальнейшем описывается пример способа задания маршрута согласно варианту осуществления настоящего изобретения со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 8. Процесс на блок-схеме последовательности операций способа, проиллюстрированной на фиг. 8, повторяется в предварительно определенном цикле обработки.
[0037] На этапе S1, датчик 2 периферийных транспортных средств обнаруживает другие транспортные средства, движущиеся около рассматриваемого транспортного средства, включающие в себя едущее впереди транспортное средство, движущееся впереди рассматриваемого транспортного средства. На этапе S2, модуль 11 вычисления величины перемещения вычисляет величину (ΔX, ΔY, Δφ) перемещения рассматриваемого транспортного средства в соответствии со скоростью вращения колес, определенной посредством датчика 4 скорости вращения колес, и угловой скоростью рыскания, определенной посредством датчика 5 угловой скорости рыскания.
[0038] На этапе S3, модуль 12 вычисления путей движения вычисляет пути движения других транспортных средств на основе предысторий позиций других транспортных средств (во временных рядах) в соответствии с информацией относительно позиций других транспортных средств, обнаруженных посредством датчика 2 периферийных транспортных средств, и величины (ΔX, ΔY, Δφ) перемещения рассматриваемого транспортного средства, вычисленной посредством модуля 11 вычисления величины перемещения. Например, модуль 12 вычисления путей движения сохраняет, в устройстве хранения данных устройства 1 управления, позиции других транспортных средств (например, центральные позиции в задних фрагментах других транспортных средств), обнаруженные посредством датчика 2 периферийных транспортных средств в текущем периоде обработки. Модуль 12 вычисления путей движения также считывает, из устройства хранения данных устройства 1 управления, предыстории позиций других транспортных средств (во временных рядах), сохраненные посредством предыдущего периода обработки, и обновляет предыстории, с тем чтобы перемещать позиции посредством величины (ΔX, ΔY, Δφ) перемещения рассматриваемого транспортного средства. Модуль 12 вычисления путей движения добавляет позиции других транспортных средств, обнаруженные в текущем периоде обработки, в обновленные предыстории позиций других транспортных средств (во временных рядах), с тем чтобы получать пути движения других транспортных средств.
[0039] На этапе S4, схема 14 оценки путей движения указывает другие транспортные средства, движущиеся по полосе движения, идентичной полосе движения рассматриваемого транспортного средства, в соответствии с путями движения других транспортных средств, вычисленными посредством модуля 12 вычисления путей движения. Например, модуль 12 вычисления путей движения вычисляет расстояние между рассматриваемым транспортным средством и путями движения соответствующих других транспортных средств и определяет другие транспортные средства как движущиеся по полосе движения, идентичной полосе движения рассматриваемого транспортного средства, когда вычисленное расстояние меньше предварительно определенного порогового значения (например, 2,0 метра).
[0040] На этапе S5, модуль 12 вычисления путей движения дополнительно указывает другое транспортное средство, в качестве едущего впереди транспортного средства, движущегося впереди рассматриваемого транспортного средства и ближайшего к рассматриваемому транспортному средству из других транспортных средств, которые определяются как движущиеся по той же полосе движения, согласно информации относительно позиций других транспортных средств, обнаруженных посредством датчика 2 периферийных транспортных средств. Модуль 12 вычисления путей движения может указывать следующее едущее впереди транспортное средство, движущееся впереди рассматриваемого транспортного средства, и второе ближайшее к рассматриваемому транспортному средству из других транспортных средств, которые определяются как движущиеся по той же полосе движения, согласно информации относительно позиций других транспортных средств, обнаруженных посредством датчика 2 периферийных транспортных средств.
[0041] На этапе S6, схема 14 оценки путей движения оценивает пути движения других транспортных средств, вычисленные посредством модуля 12 вычисления путей движения. Например, схема 14 оценки путей движения задает интервал оценки от позиции едущего впереди транспортного средства до позиции, удаленной сзади на предварительно определенное расстояние (например, 100 метров). Схема 14 оценки путей движения затем инструктирует путям движения в пределах заданного интервала оценки аппроксимироваться прямой линией и разделяет аппроксимированный интервал на секции, когда расстояние между аппроксимированной прямой линией и соответствующими путями движения превышает предварительно определенное пороговое значение (например, 0,2 метра) таким образом, что расстояние между аппроксимированной прямой линией и соответствующими путями движения приводит к предварительно определенному пороговому значению (например, 0,2 метра) или меньше. Схема 14 оценки путей движения выводит разделенное число интервала оценки в качестве величины смещения (результата оценки) путей движения соответствующих других транспортных средств.
[0042] На этапе S7, схема 15 задания маршрута определяет то, составляет или нет величина смещения путей движения едущего впереди транспортного средства, из величин смещения путей движения других транспортных средств, вычисленных посредством схемы 14 оценки путей движения, предварительно определенное пороговое значение (например, разделенное число=3) или больше. Когда величина смещения путей движения едущего впереди транспортного средства меньше предварительно определенного порогового значения, едущее впереди транспортное средство считается движущимся стабильно без отклонения вправо и влево таким образом, что пути движения едущего впереди транспортного средства выбираются в качестве цели для следования, и процесс переходит к этапу S10. На этапе S10, схема 15 задания маршрута задает, в качестве маршрута рассматриваемого транспортного средства, пути движения едущего впереди транспортного средства, выбранного в качестве цели для следования на этапе S7. Модуль 16 управления транспортного средства выводит, в различные типы актуаторов, управляющие сигналы для выполнения операций помощи при вождении или автономного вождения таким образом, что рассматриваемое транспортное средство движется по маршрута, заданной посредством схемы 15 задания маршрута.
[0043] Когда величина смещения путей движения едущего впереди транспортного средства определяется как составляющая предварительно определенное пороговое значение или более на этапе S7, пути движения едущего впереди транспортного средства считаются нестабильными вследствие отклонения вправо и влево, и процесс переходит к этапу S8, с тем чтобы дополнительно выполнять поиск путей движения другого транспортного средства в качестве цели для следования вместо едущего впереди транспортного средства.
[0044] На этапе S8, схема 15 задания маршрута определяет то, составляет или нет величина смещения путей движения другого транспортного средства, отличного от едущего впереди транспортного средства, такого как следующее едущее впереди транспортное средство, движущееся по той же полосе движения, предварительно определенное пороговое значение (например, разделенное число=3) или больше. Когда величина смещения путей движения другого транспортного средства, движущегося по той же полосе движения, меньше предварительно определенного порогового значения, другое транспортное средство считается движущимся стабильно без отклонения вправо и влево таким образом, что пути движения другого транспортного средства, движущегося по той же полосе движения, выбираются в качестве цели для следования, и процесс переходит к этапу S10. Когда предусмотрено несколько транспортных средств, движущихся по той же полосе движения, транспортное средство относительно близко к рассматриваемому транспортному средству, такое как следующее едущее впереди транспортное средство, выбирается сначала в качестве цели для следования. На этапе S10, схема 15 задания маршрута задает, в качестве маршрута рассматриваемого транспортного средства, пути движения другого транспортного средства, такого как следующее едущее впереди транспортное средство, движущееся по той же полосе движения, выбранной в качестве цели для следования на этапе S8. Модуль 16 управления транспортного средства выводит, в различные типы актуаторов, управляющие сигналы для выполнения операций помощи при вождении или автономного вождения таким образом, что рассматриваемое транспортное средство движется по маршрута, заданной посредством схемы 15 задания маршрута.
[0045] Когда величина смещения путей движения другого транспортного средства, движущегося по той же полосе движения, определяется как составляющая предварительно определенное пороговое значение или более на этапе S8, пути движения другого транспортного средства, движущегося по той же полосе движения, считаются нестабильными вследствие отклонения вправо и влево, и процесс переходит к этапу S9, с тем чтобы дополнительно выполнять поиск путей движения другого транспортного средства в качестве цели для следования вместо другого транспортного средства, движущегося по той же полосе движения.
[0046] На этапе S9, схема 15 задания маршрута определяет то, составляет или нет величина смещения путей движения другого транспортного средства, движущегося по другой полосе движения, предварительно определенное пороговое значение (например, разделенное число=3) или больше. Когда величина смещения путей движения другого транспортного средства, движущегося по другой полосе движения, меньше предварительно определенного порогового значения, другое транспортное средство считается движущимся стабильно без отклонения вправо и влево таким образом, что пути движения другого транспортного средства, движущегося по другой полосе движения, выбираются в качестве цели для следования, и процесс переходит к этапу S10. Когда предусмотрено несколько транспортных средств, движущихся по другой полосе движения, транспортное средство относительно близко к рассматриваемому транспортному средству может выбираться сначала в качестве цели для следования. На этапе S10, схема 15 задания маршрута задает, в качестве маршрута рассматриваемого транспортного средства, смещенные пути движения другого транспортного средства, движущегося по другой полосе движения, выбранной в качестве цели для следования на этапе S9 таким образом, что пути движения другого транспортного средства смещаются к рассматриваемому транспортному средству на расстояние между рассматриваемым транспортным средством и соответствующими путями движения, вычисленными на этапе S4. Модуль 16 управления транспортного средства выводит, в различные типы актуаторов, управляющие сигналы для выполнения операций помощи при вождении или автономного вождения таким образом, что рассматриваемое транспортное средство движется по маршрута, заданной посредством схемы 15 задания маршрута.
[0047] Когда величина смещения путей движения другого транспортного средства, движущегося по другой полосе движения, определяется как составляющая предварительно определенное пороговое значение или более на этапе S9, процесс переходит к этапу S11 без дополнительного управления следованием за любым транспортным средством.
[0048] На этапе S11, устройство 1 управления определяет то, выключается или нет переключатель зажигания рассматриваемого транспортного средства. Когда определяется то, что переключатель зажигания по-прежнему не выключен, процесс возвращается к этапу S1, чтобы повторять процесс от этапа S1 до этапа S10. Когда определяется то, что переключатель зажигания выключен, на этапе S11, процесс завершается.
[0049] Предварительно определенное пороговое значение, используемое в качестве критерия определения величины смещения путей движения других транспортных средств, используемого на этапах S7, S8 и S9, может быть идентичным или отличающимся друг от друга.
[0050] Программа задания маршрута
Последовательность этапов способа задания маршрута, проиллюстрированного на фиг. 8, может реализовываться в программе задания маршрута согласно варианту осуществления настоящего изобретения, с тем чтобы выполняться посредством компьютера, такого как устройство 1 управления, включенное в устройство задания маршрута, проиллюстрированное на фиг. 1. Программа задания маршрута согласно варианту осуществления настоящего изобретения, например, может сохраняться в устройстве хранения данных устройства 1 управления.
[0051] Согласно варианту осуществления настоящего изобретения, как описано выше, величина смещения путей движения едущего впереди транспортного средства в направлении вправо и влево вычисляется, и маршрут рассматриваемого транспортного средства задается согласно путям движения другого транспортного средства, отличающегося от едущего впереди транспортного средства, когда величина смещения путей движения едущего впереди транспортного средства составляет предварительно определенное пороговое значение или больше. В случае если пути движения едущего впереди транспортного средства являются нестабильными вследствие отклонения и в силу этого являются несоответствующими в качестве цели для следования, пути движения едущего впереди транспортного средства исключаются из цели для следования, с тем чтобы задавать маршрут рассматриваемого транспортного средства на основе путей движения другого транспортного средства, выбранного в качестве соответствующей цели для следования вместо едущего впереди транспортного средства. Соответственно, рассматриваемое транспортное средство может следовать по путям движения соответствующего транспортного средства, выбранного из путей движения других транспортных средств, включающих в себя едущее впереди транспортное средство, таким образом, что оно движется стабильно.
[0052] Когда величина смещения путей движения едущего впереди транспортного средства составляет предварительно определенное пороговое значение или больше, маршрут рассматриваемого транспортного средства задается согласно путям движения следующего едущего впереди транспортного средства. Поскольку пути движения другого транспортного средства, такого как следующее едущее впереди транспортное средство, движущееся по той же полосе движения, предпочтительно выбираются в качестве цели для следования в случае, если пути движения едущего впереди транспортного средства являются нестабильными вследствие отклонения, например, и в силу этого представляют собой несоответствующую цель, рассматриваемое транспортное средство следует по путям движения другого транспортного средства, такого как следующее едущее впереди транспортное средство, движущееся по той же полосе движения, с тем чтобы задавать маршрут рассматриваемого транспортного средства с высокой точностью.
[0053] Когда величина смещения путей движения другого транспортного средства, движущегося по той же полосе движения, составляет предварительно определенное пороговое значение или больше, маршрут рассматриваемого транспортного средства задается согласно путям движения другого транспортного средства, движущегося по другой полосе движения. В случае если пути движения другого транспортного средства, движущегося по той же полосе движения, являются нестабильными вследствие отклонения, например, и в силу этого представляют собой несоответствующую цель, пути движения другого транспортного средства, движущегося по другой полосе движения, выбираются в качестве цели для следования таким образом, что рассматриваемое транспортное средство следует по путям движения другого транспортного средства, движущегося по другой полосе движения. Соответственно, управление следованием по путям движения может непрерывно выполняться.
[0054] Первый модифицированный пример
Хотя вариант осуществления настоящего изобретения проиллюстрирован со случаем, в котором схема вычисления путей движения 14 выделяет интервал оценки путям движения другого транспортного средства и вычисляет число разделенных интервалов оценки в качестве величины смещения путей движения другого транспортного средства, способ вычисления величины смещения путей движения другого транспортного средства (а именно, способ оценки путей движения другого транспортного средства) не ограничен вышеописанным способом. Например, как проиллюстрировано на фиг. 9, интервал I1 оценки выделен путям PAi-PA(i-8) движения едущего впереди транспортного средства 101, с тем чтобы инструктировать путям PAi-PA(i-7) движения едущего впереди транспортного средства 101 в пределах интервала I1 оценки аппроксимироваться прямой линией LA или дугой. С использованием величин ε сдвига путей движения относительно LA аппроксимированной прямой линии или аппроксимированной кривой, сумма S величин ε сдвига может вычисляться как величина смещения путей PAi-PA(i-7) движения едущего впереди транспортного средства 101 согласно формуле (1).
[0055] Математическое выражение 1

[0056] Согласно первому модифицированному примеру, способ вычисления величины смещения путей движения другого транспортного средства (а именно, способ оценки путей движения другого транспортного средства) может использовать различные способы и может определяться надлежащим образом.
[0057] Второй модифицированный пример
Вариант осуществления настоящего изобретения проиллюстрирован со случаем, в котором схема 15 задания маршрута выбирает пути движения едущего впереди транспортного средства в качестве цели для следования независимо от того, представляет собой едущее впереди транспортное средство двухколесное транспортное средство или четырехколесное транспортное средство. Двухколесное транспортное средство предположительно имеют тенденцию отклоняться вправо и влево в ходе движения больше, чем четырехколесное транспортное средство. Схема 15 задания маршрута, например, в силу этого может определять то, представляет собой едущее впереди транспортное средство или нет двухколесное транспортное средство (четырехколесное транспортное средство), в соответствии с результатами обнаружения посредством датчика 2 периферийных транспортных средств. Когда едущее впереди транспортное средство определяется как двухколесное транспортное средство, пути движения едущего впереди транспортного средства могут исключаться из цели для следования без определения того, составляет или нет величина смещения путей движения едущего впереди транспортного средства предварительно определенное пороговое значение или больше.
[0058] Например, блок-схема последовательности операций способа, проиллюстрированная на фиг. 10, отличается от блок-схемы последовательности операций способа, проиллюстрированной на фиг. 8, тем, что этап S6x добавляется между этапами S6 и S7. На этапе S6x, схема 15 задания маршрута, например, определяет то, представляет собой едущее впереди транспортное средство или нет двухколесное транспортное средство (четырехколесное транспортное средство), в соответствии с результатами обнаружения посредством датчика 2 периферийных транспортных средств. Когда едущее впереди транспортное средство определяется как не представляющее собой двухколесное транспортное средство, процесс переходит к этапу S7. Когда едущее впереди транспортное средство определяется как двухколесное транспортное средство на этапе S6x, процесс переходит к этапу S8.
[0059] Согласно второму модифицированному примеру, когда едущее впереди транспортное средство определяется как двухколесное транспортное средство, едущее впереди транспортное средство сразу исключается из цели для следования, и пути движения другого транспортного средства, отличного от едущего впереди транспортного средства, могут выбираться в качестве цели для следования, с тем чтобы исключать пути движения двухколесного транспортного средства, которое имеет тенденцию отклоняться по сравнению с четырехколесным транспортным средством, на ранней стадии.
[0060] Другие варианты осуществления
Хотя настоящее изобретение описано выше со ссылкой на вариант осуществления, следует понимать, что настоящее изобретение не имеет намерение быть ограниченным описаниями и чертежами, составляющими часть этого раскрытия сущности. Различные альтернативные варианты осуществления, примеры и технические варианты применения должны становиться очевидными для специалистов в данной области техники согласно этому раскрытию сущности. Также следует понимать, что настоящее изобретение включает в себя различные варианты осуществления, не раскрытые в данном документе. Следовательно, объем настоящего изобретения задается только посредством указания предметов изобретения согласно формуле изобретения, обоснованно извлекаемых из вышеприведенных описаний.
Список номеров ссылок
[0061] 1 - устройство управления
2 - датчик периферийных транспортных средств
3 - датчик информации касательно транспортного средства
4 - датчик скорости вращения колес
5 - датчик скорости рыскания
11 - модуль вычисления величины перемещения
12 - модуль вычисления путей движения
13 - модуль задания маршрута
14 - схема оценки путей движения
15 - схема задания маршрута
16 - модуль управления транспортного средства
Реферат
Изобретение относится к способу и устройству задания маршрута. Способ задания маршрута с использованием датчика периферийных транспортных средств, установленного в транспортном средстве, чтобы обнаруживать позиции других транспортных средств, движущихся около транспортного средства, и контроллера для задания маршрута транспортного средства согласно путям движения других транспортных средств на основе предысторий позиций других транспортных средств. Способ содержит этапы, на которых вычисляют величину смещения, задают маршрут транспортного средства согласно путям движения едущего впереди транспортного средства, когда величина смещения меньше первого порогового значения, и задают маршрут транспортного средства согласно путям движения другого транспортного средства, отличающегося от едущего впереди транспортного средства, когда величина смещения составляет первое пороговое значение или больше. Величина смещения указывает отклонение вправо и влево путей движения едущего впереди транспортного средства. Достигается повышение безопасности управления транспортным средством. 2 н. и 4 з.п. ф-лы, 10 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ и устройство для распознавания дорожных знаков
Комментарии