Способ и система управления для регулирования вибраций пропульсивного агрегата судна - RU2712467C1
Код документа: RU2712467C1
Чертежи

Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к системе управления для регулирования вибраций пропульсивного агрегата судна.
Уровень техники
В решениях предшествующего уровня техники активное регулирование вибраций пропульсивного агрегата достигался одним или несколькими отделенными исполнительными механизмами, расположенными таким образом, чтобы воздействовать на пропульсивный агрегат с целью подавления вибраций. Вибрации измерялись подходящим датчиком, а для генерирования противодействующей вибрациям силы исполнительный механизм эксплуатировался на основе результатов измерения вибраций.
Вибрации в пропульсивном агрегате могут отличаться от вибраций из других источников. Самыми существенными источниками вибраций являются периодические импульсы от вращающихся масс в пропульсивном агрегате. Эти импульсы вызваны дисбалансами во вращающихся массах и вращением винта в воде. Лопасти винта производят импульсы с частотой вращения лопастей, которую рассчитывают посредством умножения частоты вращения винта на количество лопастей винта. Вода, протекающая вдоль пропульсивного агрегата, также создает импульсы. Кроме того, импульсы создаются первым электромотором и частотой соединения средств передачи крутящего момента, когда контроллер крутящего момента управляет переключениями первого преобразователя мощности первого электромотора. Также периодический импульс к пропульсивному агрегату может создавать смежный пропульсивный агрегат. Пропульсивный агрегат будет испытывать вибрации, например, каждый раз, когда пропульсивный агрегат поворачивается и подвергается воздействию наклонного потока воды.
Раскрытие сущности изобретения
Объектом настоящего изобретения является улучшенный способ и улучшенная система управления для регулирования вибраций пропульсивного агрегата судна.
Способ для регулирования вибраций пропульсивного агрегата судна раскрыт в п. 1 формулы изобретения.
Система управления для регулирования вибраций пропульсивного агрегата судна раскрыта в п. 10 формулы изобретения.
Пропульсивный агрегат содержит:
рамную конструкцию, имеющую верхнюю часть и нижнюю часть, причем верхняя часть образует опорный рычаг, выступающий наружу из корпуса судна, а нижняя часть образует продольное отделение, имеющее первый конец и второй, противоположный конец,
гребной вал, расположенный в нижней части рамной конструкции,
по меньшей мере один винт, присоединенный к гребному валу,
первый электромотор, приводящий в действие гребной вал,
Способ содержит этапы, на которых:
измеряют вибрации пропульсивного агрегата с помощью по меньшей мере одного измерительного устройства,
на основе сигнала измеренных вибраций формируют первый вспомогательный сигнал регулирования крутящего момента,
прибавляют первый вспомогательный сигнал регулирования крутящего момента к первому сигналу регулирования крутящего момента, генерируемому первым контроллером крутящего момента первого электромотора, причем первый вспомогательный сигнал регулирования крутящего момента действует против измеренных вибраций с целью снижения указанных вибраций.
Система управления содержит:
по меньшей мере одно измерительное устройство для измерения вибраций пропульсивного агрегата,
первый контроллер крутящего момента для генерирования сигнала регулирования крутящего момента и его подачи в первый электромотор,
первый дополнительный контроллер крутящего момента, выполненный с возможностью получения в качестве входного сигнала измеренных вибраций по меньшей мере от одного измерительного устройства,
первый активный контроллер вибраций для генерирования первого вспомогательного сигнала регулирования крутящего момента на основе сигналов измеренных вибраций, при этом
первый вспомогательный сигнал регулирования крутящего момента прибавляют к первому сигналу регулирования крутящего момента, генерируемому первым контроллером крутящего момента первого электромотора, причем первый вспомогательный сигнал регулирования крутящего момента действует против измеренных вибраций с целью снижения указанных вибраций.
В изобретении подавляется появление вибраций, а уже появившиеся вибрации снижаются посредством нового способа и системы управления для регулирования вибраций пропульсивного агрегата судна. Вибрации пропульсивного агрегата могут быть измерены по меньшей мере одним измерительным устройством, а выходной сигнал по меньшей мере одного измерительного устройства может отфильтровываться для формирования первого вспомогательного сигнала регулирования крутящего момента, который может быть прибавлен к первому сигналу регулирования крутящего момента, генерируемому первым контроллером крутящего момента первого электромотора. Первый вспомогательный сигнал регулирования крутящего момента формирует воздействие в направлении, противоположном измеренным вибрациям пропульсивного агрегата.
Основные естественные вибрации пропульсивного агрегата происходят в продольном направлении пропульсивного агрегата, в поперечном направлении или в направлении от одной стороны до другой пропульсивного агрегата, и в направлении вращения пропульсивного агрегата, или формируются посредством любой комбинации вышеуказанного. Для измерения вибраций пропульсивного агрегата в этих трех направлениях могут использоваться одно или несколько измерительных устройств.
В способе согласно изобретению отсутствует необходимость использования внешних исполнительных механизмов, формирующих противодействующую силу вибрациям. Противодействие будет сформировано в электромоторе посредством вспомогательного сигнала регулирования крутящего момента.
Краткое описание чертежей
Изобретение более детально раскрыто ниже посредством предпочтительных вариантов осуществления со ссылкой на приложенные чертежи, на которых:
На фиг. 1 показан вертикальный поперечный разрез пропульсивного агрегата судна в продольном направлении,
На фиг. 2 показан вертикальный поперечный разрез пропульсивного агрегата с фиг. 1 в поперечном направлении,
На фиг. 3 показан горизонтальный поперечный разрез пропульсивного агрегата с фиг. 1,
На фиг. 4 показан горизонтальный поперечный разрез пропульсивного агрегата с фиг. 1, оснащенного измерительными устройствами,
На фиг. 5 показана принципиальная блок-схема активного регулирования вибраций первого электромотора, приводящего в действие гребной вал пропульсивного агрегата,
На фиг. 6 показана принципиальная блок-схема активного регулирования вибраций второго электромотора, приводящего во вращение пропульсивный агрегат относительно судна.
Осуществление изобретения
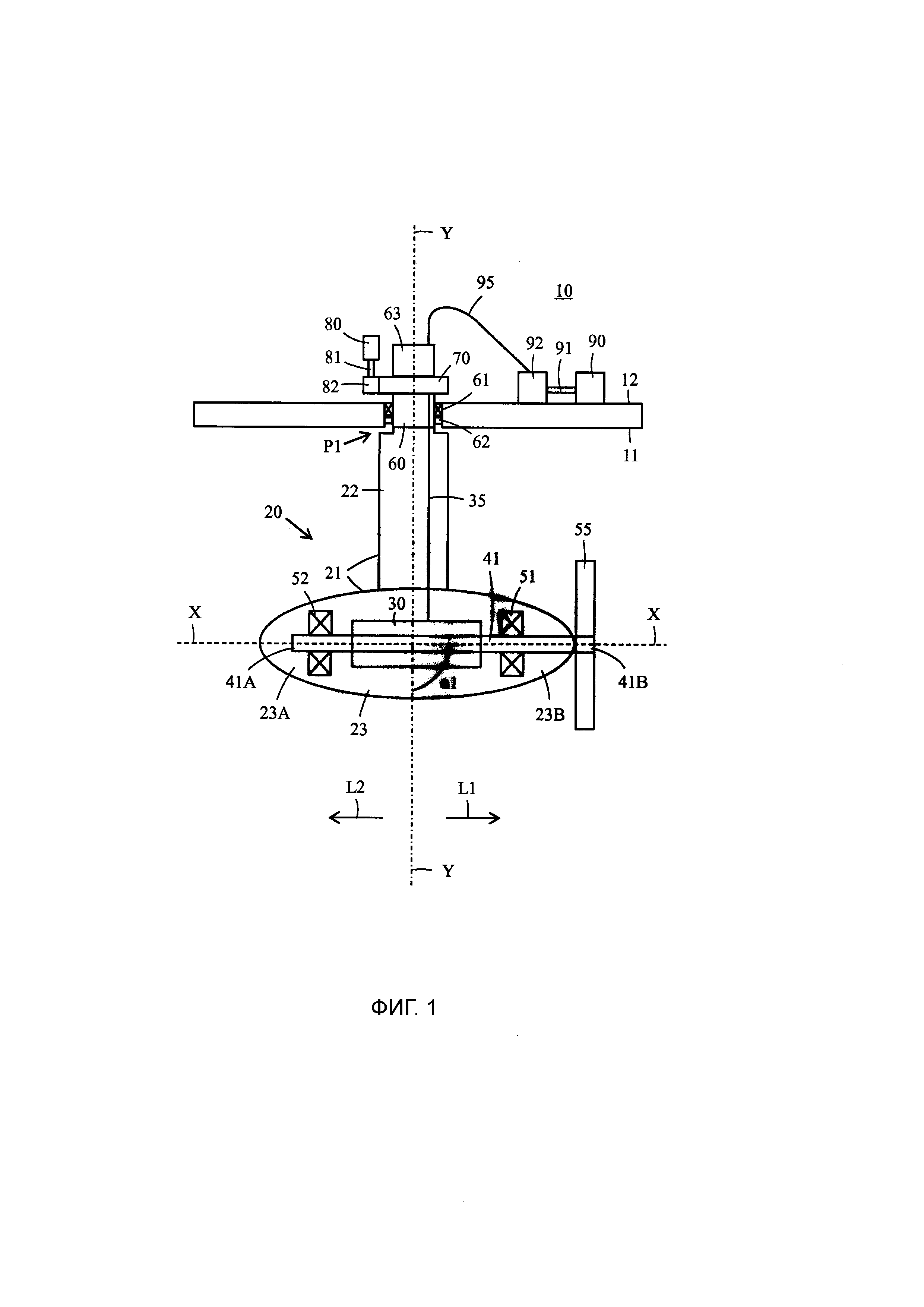
На фиг. 1 показан вертикальный поперечный разрез в продольном направлении пропульсивного агрегата судна. Судно 10 может иметь двойное днище, т.е. первое, внешнее днище 11, формирующее корпус судна, и второе, внутреннее днище 12. Пропульсивный агрегат 20 может содержать рамную конструкцию 21, имеющую верхнюю часть 22 и нижнюю часть 23.
Верхняя часть 22 рамной конструкции 21 пропульсивного агрегата 20 может образовывать опорный рычаг, выступающий наружу из корпуса 11 судна 10. Полая верхняя часть 22 рамной конструкции 21 может проходить по существу вертикально вниз от корпуса 11 судна 10. Пропульсивный агрегат 20 может быть соединен с судном 10 с возможностью вращения посредством верхнего конца верхней части 22 рамной конструкции 21 так, чтобы пропульсивный агрегат 20 мог поворачиваться на 360 градусов вокруг центральной оси Y-Y вращения. От первого внешнего дна 11 до второго внутреннего дна 12 судна 10 в дне судна 10 может быть сформирован канал Р1. Верхний конец верхней части 22 рамной конструкции 21 может быть соединен с верхним блоком 60. Верхний блок 60 может проходить через канал Р1 и может быть прикреплен с возможностью вращения с помощью поворотного подшипника к корпусу судна 10. Верхний блок 60 может в целом иметь форму цилиндра. Вместо того чтобы быть отдельной частью, верхний блок 60 может быть сформирован частью верхнего конца верхней части 22 рамной конструкции 21. Поворотное уплотнение 62 может быть размещено под поворотным подшипником 61, чтобы сформировать уплотнение между морской водой и внутренним пространством корпуса судна 10.
Нижняя часть 23 рамной конструкции 21 пропульсивного агрегата 20 может формировать проходящее по существу горизонтально продольное полое отделение, имеющее первый конец 23А и второй, противоположный конец 23В. Гребной вал 41 с центральной осью Х-Х вращения может быть расположен в нижней части 23 рамной конструкции 21. Гребной вал 41 может поддерживаться в нижней части 23 рамной конструкции 21 с помощью подшипников 51, 52, расположенных на осевом расстоянии Х-Х друг от друга. Винт 55 может быть прикреплен по меньшей мере к одному концу гребного вала 41, выступающего из нижней части 23 рамной конструкции 21. Первый электромотор 30 может приводить в действие гребной вал 41. Первый конец 41А гребного вала 41 может быть соединен с первым электромотором 30, а второй конец 41В гребного вала 41 может выступать из заднего конца 23 В нижней части 23 рамной конструкции 21. Винт 55 может быть соединен со вторым, внешним концом 41В гребного вала 41. Центральная ось Х-Х вращения гребного вала 41 формирует линию вала и продольное направление пропульсивного агрегата 20. Гребной вал 41 может быть неразъемным валом или может быть разделен на несколько частей.
Подшипники 51, 52 гребного вала 41 могут быть расположены на противоположных сторонах оси Х-Х первого электромотора 30. Первый подшипник 51 на втором конце 23В нижней части 23 рамной конструкции 21 может преимущественно быть радиальным подшипником. Второй подшипник 52 на втором конце 23А нижней части 23 рамной конструкции 21 может преимущественно быть гибридным подшипником, содержащим радиальный подшипник и осевой подшипник скольжения, или может состоять из роликовых подшипников различных типов и в различных количествах. Осевой подшипник скольжения или комбинация различных роликовых подшипников будут забирать осевые нагрузки гребного вала 41.
Элемент 70 вращения может быть расположен в корпусе 11 судна 10. Элемент 70 вращения присоединен к верхнему блоку 60. Элемент 70 вращения может поворачиваться на 360 градусов вокруг центральной оси Y-Y вращения с помощью второго электромотора 80. Второй электромотор 80 может приводить в действие элемент 70 вращения. Элемент 70 вращения может быть сформирован посредством шестерни. Второй электромотор 80 может быть соединен с ведущим зубчатым колесом 82 через второй вал 81, а зубцы ведущего зубчатого колеса 82 могут быть соединены с зубцами шестерни 70. Естественно, к шестерне 70 могут быть подключены несколько схожих вторых электромоторов 80. Вращение шестерни 70 будет приводить к вращению пропульсивного агрегата 20. Шестерня 70 может иметь форму кольца с отверстием в середине. Зубцы шестерни 70 могут быть расположены на внешнем краю или на внутреннем краю шестерни 70.
Также, в судне 10 может присутствовать двигатель 90 и генератор 92, соединенный с двигателем 90 посредством вала 91. Двигатель 90 может быть обычным двигателем внутреннего сгорания, используемым в суднах 10. Генератор 92 генерирует электроэнергию, необходимую в судне 10 и пропульсивном агрегате 20. В судне 10 может быть несколько двигателей 90 внутреннего сгорания и генераторов 92.
Также с шестерней 70 может быть соединена система 63 контактных колец. Электроэнергия может передаваться от генератора 92 к системе 63 контактных колец через первый кабель 95. Электроэнергия также может передаваться от системы 63 контактных колец к первому электромотору 30 через второй кабель 35. Система 63 контактных колец необходима для передачи электроэнергии между неподвижным корпусом 11 судна 10 и вращающимся пропульсивным агрегатом 20.
Винт 55 может быть тянущим винтом, при этом направление движения судна 10 вперед показано стрелкой L1. С другой стороны, винт 55 может быть толкающим винтом, при этом направление движения судна 10 вперед показано противоположно направленной стрелкой L2. Пропульсивный агрегат 20 также может быть оснащен винтом на каждом конце нижней части 23 рамной конструкции 21. На фигуре показан один винт 55, но один винт 55 может быть заменен двумя винтами противоположного вращения.
На фигуре показано продольное направление L1, L2 пропульсивного агрегата 20. Пропульсивный агрегат 20 может вибрировать в продольном направлении L1, L2, что означает, что продольный агрегат 20 выполняет качательное движение в продольном направлении L1, L2 относительно точки опоры продольного агрегата 20 на поворотном подшипнике 61.
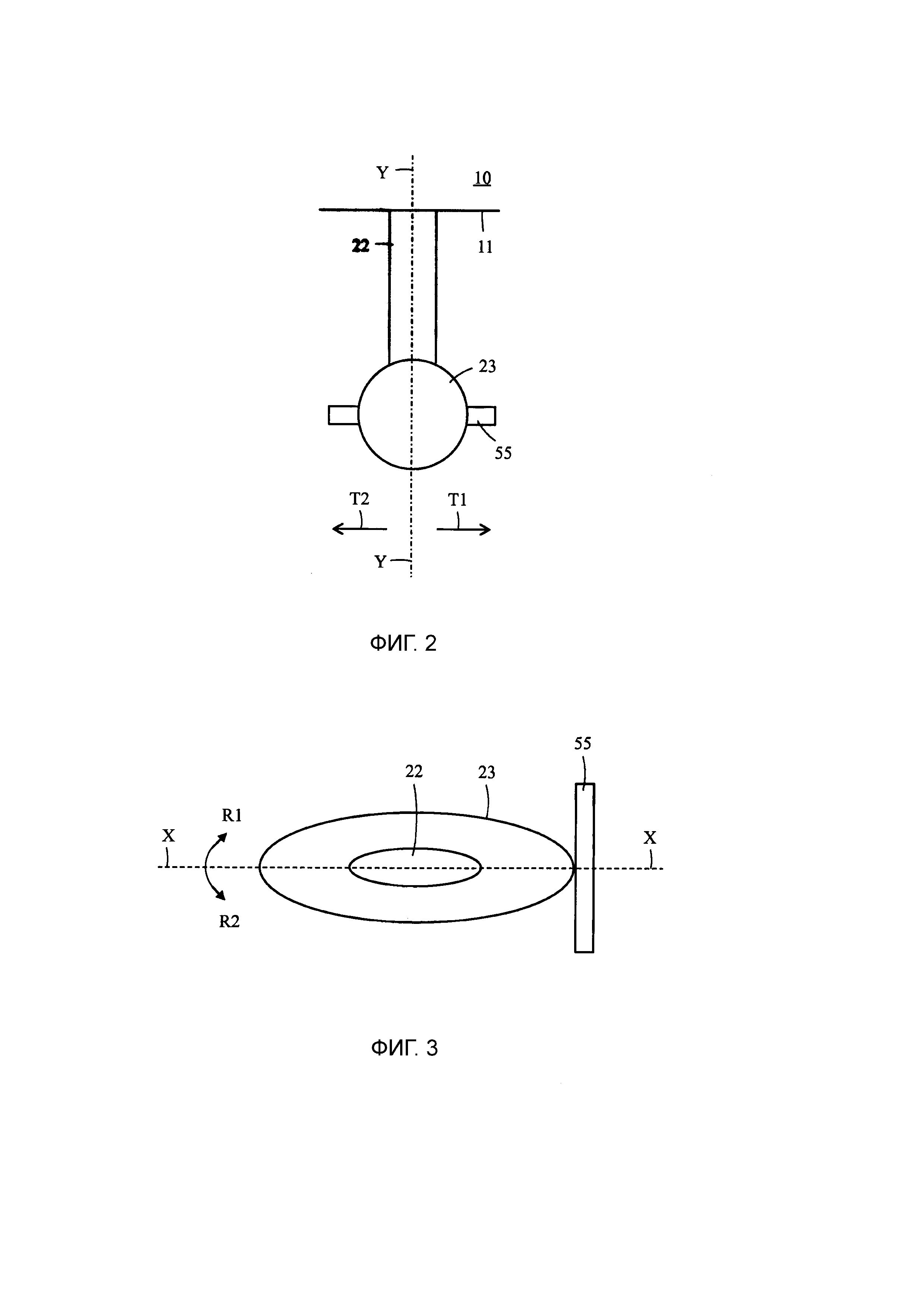
На фиг. 2 показан вертикальный поперечный разрез в поперечном направлении пропульсивного агрегата с фигуры 1. На фигуре показано поперечное направление Т1, Т2 пропульсивного агрегата 20, перпендикулярное продольному направлению L1, L2 пропульсивного агрегата 20. Пропульсивный агрегат 20 может вибрировать в поперечном направлении Т1, Т2, что означает, что продольный агрегат 20 выполняет качательное движение в поперечном направлении Т1, Т2 по отношению к точке опоры продольного агрегата 20 на поворотном подшипнике 61.
На фиг. 3 показан горизонтальный поперечный разрез пропульсивного агрегата с фигуры 1. На фигуре показано направление R1, R2 вращения пропульсивного агрегата 20, причем пропульсивный агрегат 20 поворачивается вокруг центральной оси Y-Y вращения. Пропульсивный агрегат 20 может вибрировать в направлении R1, R2 вращения пропульсивного агрегата 20, что означает, что пропульсивный агрегат 20 выполняет возвратное движение вокруг центральной оси Y-Y вращения.
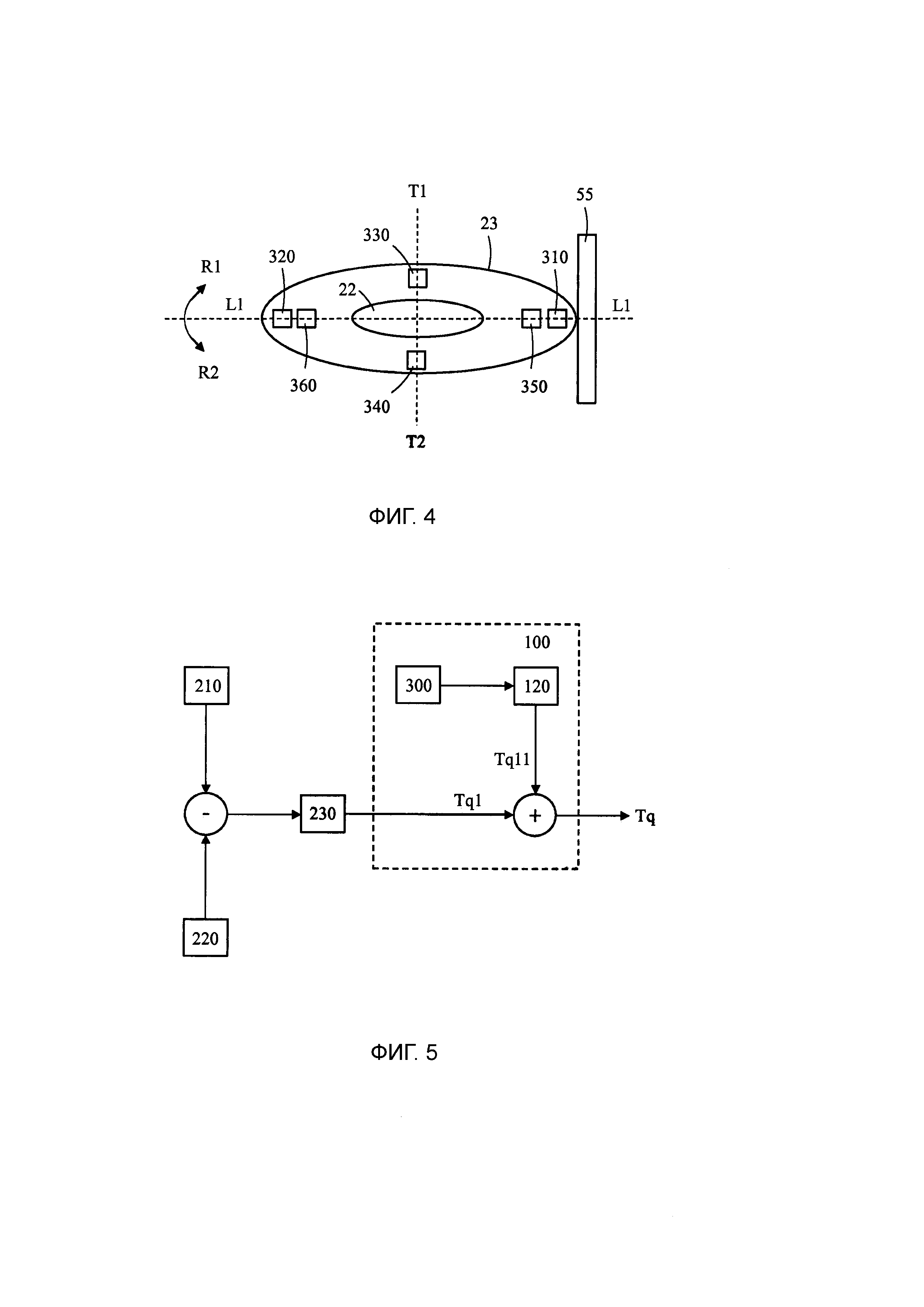
На фиг. 4 показан горизонтальный поперечный разрез пропульсивного агрегата с фигуры 1, оснащенного измерительными устройствами. Пропульсивный агрегат 20 может быть оснащен по меньшей мере одним измерительным устройством 310, 320, преимущественно первой парой измерительных устройств 310, 320, для измерения продольных L1, L2 вибраций пропульсивного агрегата 20. Пропульсивный агрегат 20 может дополнительно быть оснащен по меньшей мере одним измерительным устройством 330, 340, преимущественно второй парой измерительных устройств 330, 340, для измерения поперечных Т1, Т2 вибраций пропульсивного агрегата 20. Пропульсивный агрегат 20 также может дополнительно быть оснащен по меньшей мере одним измерительным устройством 350, 360, преимущественно третьей парой измерительных устройств 350, 360, для измерения вращательных R1, R2 вибраций пропульсивного агрегата 20. Это является преимущественным решением, однако также могут использоваться комбинации измерительных устройств, измеряющих вибрации в двух или более направлениях. В настоящей заявке измерительные устройства 310, 320, 330, 340, 350 и 360 в основном обозначаются ссылочным номером 300.
Первая пара измерительных устройств 310, 320, измеряющих продольные вибрации, может быть расположена на уровне гребного вала 41 на противоположных продольных концах продольной центральной оси Х-Х в нижней части 23 рамной конструкции 21. Вторая пара измерительных устройств 330, 340, измеряющих поперечные вибрации, может быть расположена на уровне гребного вала 41 на противоположных поперечных концах вертикальной центральной оси Y-Y в нижней части 23 рамной конструкции 21. Третья пара измерительных устройств 350, 360, измеряющих вращательные вибрации, может быть расположена на уровне гребного вала 41 на противоположных продольных концах продольной центральной оси Х-Х в нижней части 23 рамной конструкции 21. С другой стороны, первая пара измерительных устройств 310, 320 и вторая пара измерительных устройств 330, 340 могут быть расположены на линии вала в центральной части нижней части 23 рамной конструкции 21. С другой стороны, третья пара измерительных устройств 350, 360 может быть расположена на уровне поворотного подшипника 61 в судне 10.
Может использоваться любой вид измерительных устройств 300, реагирующих на движение пропульсивного агрегата 20, вызываемое вибрациями. Измерительные устройства 300 могут быть, например, датчиками деформаций или датчиками, измеряющими движение или ускорение, или измерительными устройствами на основе лазерных лучей, или измерительными устройствами на основе камер или видеокамер. Датчики деформаций измеряют деформации, при помощи чего движение пропульсивного агрегата 20 может вычисляться на основе измеренных деформаций. Лазерный луч может быть предусмотрен в пропульсивном агрегате 20 и направлен на светочувствительный приемник. Точка соприкосновения лазерного луча со светочувствительным приемником будет меняться, когда пропульсивный агрегат 20 вибрирует. В пропульсивном агрегате 20 на уровне гребного вала 41 могут быть расположены по меньшей мере одно измерительное устройство 310, 320 или первая пара измерительных устройств 330, 340, измеряющих продольные L1, L2 вибрации пропульсивного агрегата 20. В пропульсивном агрегате 20 на уровне гребного вала 41 могут быть расположены по меньшей мере одно измерительное устройство 330, 340 или вторая пара измерительных устройств 330, 340, измеряющих поперечные Т1, Т2 вибрации пропульсивного агрегата 20. Это является предпочтительным вариантом, поскольку уровень гребного вала 41 - это уровень, на котором создаются продольные и поперечные противодействующие силы. На уровне гребного вала 41 или в соединении с поворотным подшипником 61 могут быть расположены по меньшей мере одно измерительное устройство 350, 360 или третья пара измерительных устройств 350, 360, измеряющих вращательные R1, R2 вибрации пропульсивного агрегата 20. Измерительные устройства 300 могут быть расположены в пропульсивном агрегате 20 или на внешней поверхности пропульсивного агрегата 20, или в судне 10 или на внешней поверхности судна 10.
Периодические импульсы, исходящие из линии 30, 41, 51, 52 вращающегося вала (электромотора 30, вала 41 и подшипников 51, 52) и винта 55, являются основными источниками вибраций в пропульсивном агрегате 20. Эти импульсы вызваны дисбалансами во вращающихся массах и вращении винта 55 в воде. Лопасти винта 55 производят импульсы с частотой вращения лопастей, которая является частотой вращения винта 85, умноженной на количество лопастей винта 55. Вода, протекающая вдоль пропульсивного агрегата 20, также создает импульсы. Дополнительные импульсы создаются первым электромотором 30 и частотой переключения крутящего момента первого преобразователя мощности, приводящего в движение первый электромотор 30. Также периодический импульс, направленный к пропульсивному агрегату, может создавать смежный пропульсивный агрегат. Вибрации пропульсивного агрегата характеризуются тремя основными направлениями. Это продольное направление L1, L2 на пропульсивном агрегате 20, поперечное направление Т1, Т2 или направление "бок-бок" пропульсивного агрегата 20, и направление R1, R2 вращения пропульсивного агрегата 20. Также существуют вибрации, вызываемые комбинацией вибраций в трех направлениях.
На фиг. 5 показана принципиальная схема активного регулирования вибраций первого электромотора, приводящего в действие гребной вал пропульсивного агрегата.
Основной контур регулирования первого электромотора 30 содержит регулирование скорости, за которым следует регулирование крутящего момента вала ротора. Фактическая частота 220 вращения ротора первого электромотора 30 и заданное значение 210 частоты вращения ротора первого электромотора 30 подаются в дифференциатор. Выходные данные дифференциатора, т.е. разность между заданным значением частоты вращения ротора и фактическим значением частоты вращения ротора, подаются в первый контроллер 230 крутящего момента. Дополнительный первый контроллер 100 крутящего момента добавляют к регулированию крутящего момента первого электромотора 30. Одно или более измерительных устройств 300 измеряют вибрации пропульсивного агрегата 20 в требуемом направлении или направлениях, а измеренное значение вибраций подают в первый активный контроллер 120 вибраций. Сигнал измеренных вибраций обрабатывают, и генерируют первый вспомогательный сигнал регулирования крутящего момента в первом активном контроллере 120 вибраций. Выходные данные первого активного контроллера 120 вибраций подают в сумматор, в который также подают выходные данные первого контроллера 230 крутящего момента. Таким образом, выходные данные первого активного контроллера 120 вибраций прибавляют к выходным данным первого контроллера 230 крутящего момента, а выходные данные сумматора используют для регулирования крутящего момента первого электромотора 30.
Посредством использования активного регулирования вибраций, действующих непосредственно на первый электромотор 30, предотвращается появление вибраций и/или ослабление появившихся вибраций. Вибрации пропульсивного агрегата 20 измеряют по меньшей мере одним измерительным устройством 300 в соответствующих направлениях, а выходные сигналы по меньшей мере одного измерительного устройства 300 используют для генерирования первого вспомогательного сигнала Tq11 регулирования крутящего момента, который прибавляют к первому сигналу Tq1 регулирования крутящего момента, генерируемому первым контроллером 230 крутящего момента. Значение прибавляемого первого вспомогательного сигнала Tq11 регулирования крутящего момента увеличит или уменьшит значение первого сигнала Tq1 регулирования крутящего момента, генерируемого первым контроллером 230 крутящего момента, с целью создания противодействия вибрациям в первом электромоторе 30. Противодействие будет снижать вибрации в пропульсивном агрегате 20.
Система управления может содержать по меньшей мере одно измерительное устройство 310, 320, преимущественно первую пару измерительных устройств 310, 320, измеряющих вибрации пропульсивного агрегата 20 в продольном направлении L1, L2 судна 10. Первый вспомогательный сигнал Tq11 крутящего момента может создавать тягу, противодействующую по меньшей мере одному винту 55, для того, чтобы противодействующая тяга действовала в противоположном направлении по отношению к продольным L1, L2 вибрациям пропульсивного агрегата 20, благодаря чему указанные вибрации ослабляются противодействующей тягой. Первый вспомогательный сигнал Tq11 крутящего момента увеличит или уменьшит тягу, которую создает по меньшей мере один винт 55 в ответ на первый сигнал Tq1 крутящего момента. Тяга будет увеличиваться, если пропульсивный агрегат 20 качается в продольном направлении L1, L2 против направления тяги, и наоборот.
Система управления может дополнительно содержать по меньшей мере одно измерительное устройство 330, 340, преимущественно вторую пару измерительных устройств 330, 340, измеряющих вибрации пропульсивного агрегата 20 в поперечном направлении Т1, Т2 судна 10. Первый вспомогательный сигнал Tq11 крутящего момента создает противодействующий изгибающий момент с помощью инерции вращения первого электромотора 30 и винта 55, так что противодействующий изгибающий момент действует в противоположном направлении по отношению к поперечным Т1, Т2 вибрациям пропульсивного агрегата 20, при помощи чего снижают указанные вибрации за счет противодействующего изгибающего момента. Первый вспомогательный сигнал Tq11 крутящего момента увеличит или уменьшит изгибающий момент, который создает первый электромотор 30 в ответ на первый сигнал Tq1 крутящего момента. Изгибающий момент будет увеличиваться, если пропульсивный агрегат 20 качается в поперечном направлении Т1, Т2 против направления изгибающего момента, и наоборот.
Система управления может дополнительно содержать по меньшей мере одно измерительное устройство 310, 320, преимущественно первую пару измерительных устройств 310, 320, измеряющих вибрации пропульсивного агрегата 20 в продольном направлении L1, L2 судна 10, и по меньшей мере одно измерительное устройство 330, 340, преимущественно вторую пару измерительных устройств 330, 340, измеряющих вибрации пропульсивного агрегата 20 в поперечном направлении Т1, Т2 судна 10. Измерение вибраций пропульсивного агрегата 20 в продольном направлении L1, L2 судна 10 и в поперечном направлении Т1, Т2 судна 10 может выполняться одновременно, а создание противодействующей тяги и противодействующего изгибающего момента также может выполняться одновременно.
На фиг. 6 показана принципиальная схема активного регулирования вибраций второго электромотора, приводящего во вращение пропульсивный агрегат относительно судна. Активное регулирование вибраций второго электромотора соответствует активному регулированию вибраций первого электромотора.
Основной контур регулирования второго электромотора 80 включает в себя регулирование скорости, за которым следует регулирование крутящего момента вала ротора. Фактическая частота 225 вращения ротора второго электромотора 80 и заданное значение 215 частоты вращения ротора второго электромотора 80 подают в дифференциатор. Выходные данные дифференциатора, т.е. разность между заданным значением частоты вращения ротора и фактическим значением частоты вращения ротора, подают во второй контроллер 235 крутящего момента. Второй дополнительный контроллер 105 крутящего момента добавляют к регулированию крутящего момента второго электромотора 80. Одно или более измерительных устройств 300 измеряют вибрации пропульсивного агрегата 20 в требуемом направлении или направлениях, а измеренное значение вибраций подают во второй активный контроллер 125 вибраций. Сигнал измеренных вибраций обрабатывают, и во втором активном контроллере 125 генерируют второй вспомогательный сигнал регулирования крутящего момента. Выходные данные второго активного контроллера 125 вибраций подают в сумматор, в который также подают выходные данные второго контроллера 235 крутящего момента. Таким образом, выходные данные второго активного контроллера 129 вибраций прибавляют к выходным данным второго контроллера 235 крутящего момента, а выходные данные сумматора используют для регулирования крутящего момента второго электромотора 80.
Посредством использования активного регулирования вибраций, действующего непосредственно на второй электромотор 80, предотвращается появление вибраций и/или ослабление появившихся вибраций. Вибрации пропульсивного агрегата 20 во вращательных направлениях измеряют по меньшей мере одним измерительным устройством 300, а выходные сигналы по меньшей мере одного измерительного устройства 300 используют для генерирования второго вспомогательного сигнала Tq12 регулирования крутящего момента, который прибавляют ко второму сигналу Tq2 регулирования крутящего момента, генерируемому вторым контроллером 235 крутящего момента. Значение прибавляемого второго вспомогательного сигнала Tq12 регулирования крутящего момента увеличит или уменьшит значение второго сигнала Tq2 регулирования крутящего момента, генерируемого вторым контроллером 235 крутящего момента, с целью создания противодействия вибрациям во втором электромоторе 80. Противодействие будет ослаблять вибрации в пропульсивном агрегате 20.
Вращательные вибрации могут измеряться парой датчиков, измеряющих ускорение. Датчики могут быть расположены на уровне вала на продольных концах нижней части 23 рамной конструкции. С целью определения вращательных вибраций может вычисляться разность измеренных сигналов двух датчиков. С другой стороны, вращательные вибрации могут быть определены посредством измерения крутящего момента вращения второго электромотора 80. Затем соответствующий второй вспомогательный сигнал Tq12 регулирования крутящего момента может быть прибавлен ко второму сигналу Tq2 регулирования крутящего момента.
Второй вспомогательный сигнал Tq12 крутящего момента увеличит или уменьшит момент рулевого управления, который создает второй электромотор 80 в пропульсивном агрегате 20 в ответ на второй сигнал Tq2 крутящего момента. Момент рулевого управления будет увеличиваться, если пропульсивный агрегат 20 вращается в направлении R1, R2 против направления вращения, и наоборот.
Система управления для регулирования вибраций пропульсивного агрегата согласно изобретению содержит:
по меньшей мере одно измерительное устройство 300 для измерения вибраций пропульсивного агрегата 20,
первый контроллер 230 крутящего момента для генерирования сигнала (Tq1) регулирования крутящего момента и его подачи в первый электромотор 30,
первый дополнительный контроллер 100 крутящего момента, выполненный с возможностью получения в качестве входного сигнала измеренных вибраций по меньшей мере от одного измерительного устройства (300),
первый активный контроллер 120 вибраций для генерирования первого вспомогательного сигнала Tq11 регулирования крутящего момента на основе сигналов измеренных вибраций, при этом
предусмотрена возможность прибавления первого вспомогательного сигнала Tq11 регулирования крутящего момента к первому сигналу Tq1 регулирования крутящего момента, генерируемому первым контроллером 230 крутящего момента первого электромотора 30, причем первый вспомогательный сигнал Tq11 регулирования крутящего момента действует против измеренных вибраций с целью снижения указанных вибраций.
Способ регулирования вибраций пропульсивного агрегата 20 согласно изобретению содержит этапы, на которых:
измеряют вибрации пропульсивного агрегата 20 с помощью по меньшей мере одного измерительного устройства 300,
на основе сигнала измеренных вибраций формируют первый вспомогательный сигнал Tq11 регулирования крутящего момента,
прибавляют первый вспомогательный сигнал Tq11 регулирования крутящего момента к первому сигналу Tq1 регулирования крутящего момента, генерируемому первым контроллером 230 крутящего момента первого электромотора 30, причем первый вспомогательный сигнал Tq11 крутящего момента действует против измеренных вибраций пропульсивного агрегата 20 с целью снижения указанных вибраций.
Сигнал измеренных вибраций может быть отфильтровыван, и может быть сгенерирован сигнал регулирования для снижения вибраций посредством полосовых фильтров, которые настроены на основную собственную частоту или частоты в соответствующем направлении пропульсивного агрегата 20, т.е. в продольном направлении L1, L2, поперечном направлении Т1, Т2 и направлении R1, R2 вращения. Также может использоваться фазорегулятор для регулирования фазы момента демпфирования, чтобы минимизировать измеренное движение, т.е. измеренные вибрации.
Измерительными устройствами для измерения вибраций пропульсивного агрегата 20 могут быть, например, датчики ускорения, измеряющие ускорение пропульсивного агрегата 20 в каждом интересующем направлении. Ускорение, вызываемое вибрациями пропульсивного агрегата 20 в соответствующих направлениях, затем измеряется датчиками ускорения. Выходные данные датчиков ускорения могут проходить через интегратор, благодаря чему выходные данные интегратора будут представлять собой скорость вибраций. Выходные данные интегратора затем могут быть направлены через полосовой фильтр, настроенный на основную собственную частоту или частоты в соответствующем направлении. Выходные данные полосового фильтра затем могут использоваться в качестве вспомогательного сигнала Tq2 регулирования крутящего момента для увеличения или уменьшения сигнала Tq1, Tq2 регулирования крутящего момента, генерируемого контроллером 230, 235 крутящего момента электромотора 30, 80 и, таким образом, для снижения вибраций.
Динамическое движение пропульсивного агрегата 20 может быть выражено следующим уравнением (1):

где



Выходной сигнал полосового фильтра, представляющий собой скорость

Пропульсивный агрегат 20 может, например, подвергаться воздействию двух основных собственных частот в продольном направлении L1, L2 и одной основной собственной частоты в поперечном направлении Т1, T2. Основные собственные частоты в продольном направлении могут быть равными 3.6 Гц и 7.5 Гц, а основная собственная частота в поперечном направлении может быть равна 5 Гц.
Эта ситуация может быть легко разрешена генерированием отдельных вспомогательных сигналов крутящего момента для обоих направлений. Вспомогательный сигнал крутящего момента для регулирования продольных вибраций будет активен на частотах 3.9 Гц и 7.5 Гц продольных вибраций и неактивен на частоте 5 Гц поперечных вибраций. Вспомогательный сигнал крутящего момента для регулирования поперечных вибраций будет активен на частоте 5 Гц поперечных вибраций и неактивен на частотах 3.6 Гц и 7.5 Гц продольных вибраций. Взаимное влияние между вспомогательными сигналами крутящего момента в двух направлениях будет отсутствовать или будет ограниченным.
Однако изобретение также возможно использовать и в ситуации, когда некоторые частоты продольных вибраций близки к некоторым частотам поперечных вибраций. Это может разрешаться многопараметрическими техниками регулирования. Алгоритмы одновременно получат сигналы вибраций в продольном направлении и в поперечном направлении и вычислят подходящий комбинированный вспомогательный сигнал регулирования крутящего момента на основе сигналов вибраций в обоих направлениях.
Изобретение может применяться на практике посредством первого измерения вибраций в соответствующих трех направлениях на судне. Для каждого направления затем выбираются подходящие полосовые фильтры. Затем для каждого направления генерируется вспомогательный сигнал регулирования крутящего момента и тестируется на судне, снабженном пропульсивным агрегатом или пропульсивными агрегатами, с целью настройки полосового фильтра и определения подходящего усиления для вспомогательного сигнала регулирования крутящего момента.
Значение вспомогательного сигнала крутящего момента может быть установлено в диапазоне 1-20%, преимущественно в диапазоне 1-3% от максимального значения крутящего момента, производимого контроллером 230, 235 крутящего момента соответствующего электромотора 30, 80.
Изобретение может использоваться в соединении с электромоторами 30, 80, приводимыми в движение посредством преобразователя мощности. Преобразователь мощности может содержать выпрямитель, преобразующий трехфазовое сетевое напряжение переменного тока в напряжение постоянного тока, промежуточный контур и инвертор, преобразующий напряжение постоянного тока в промежуточном контуре в трехфазовое напряжение переменного тока, подводимого к электромотору. Контроллер 230, 235 крутящего момента управляет инвертором в преобразователе мощности. Преобразователь мощности может управляться настройкой частоты, настройкой потока или прямой регулировкой крутящего момента (ПРКМ). ПРКМ включает в себя регулирование скорости и регулирование крутящего момента. Регулирование крутящего момента в ПРКМ основано на адаптивной модели мотора. ПРКМ обеспечивает очень быстрое управление электромотором 30, 80.
Электромотор 30, 80 может быть индукционным электродвигателем, например, синхронным электродвигателем с ротором с постоянными магнитами.
Первый электромотор 30, показанный на фигурах, расположен в нижней части 23 рамной конструкции 21 пропульсивного агрегата 20. Также есть возможность расположения первого электромотора 30 в верхней части 22 рамной конструкции 21. Вертикальный вал может проходить от первого электромотора 30 к гребному валу 41. Нижний конец вертикального вала может быть соединен с гребным валом 41 через трансмиссию. Третья возможность может заключаться в расположении первого электромотора 30 в корпусе судна 10. Первый электромотор 30 в судне 10 может быть соединен с вертикальным валом, проходящим вниз к гребному валу 41 и соединенным с гребным валом 41 через трансмиссию.
Ось Y-Y вращения пропульсивного агрегата 20 на фигурах показана вертикальной, но это необязательно. Ось Y-Y вращения пропульсивного агрегата 20 может образовывать небольшой угол в диапазоне 0-5 градусов к вертикальному направлению. Ось Х-Х вращения гребного вала 41 на фигурах показана горизонтальной, но это необязательно. Ось Х-Х вращения гребного вала 41 может образовывать небольшой угол в диапазоне 0-10 градусов к горизонтальному направлению. Угол α1 между осью Х-Х вращения гребного вала 41 и осью Y-Y вращения пропульсивного агрегата 20 на фигурах показан прямым, но это необязательно. Указанный угол α1 может отклоняться от 90 градусов.
Раскрытый на фигурах пропульсивный агрегат 20 является азимутальным пропульсивным агрегатом, который может вращаться на 360 градусов. Естественно, изобретение может использоваться в стационарном пропульсивном агрегате, при этом пропульсивный агрегат прикреплен к корпусу судна. Судно может быть снабжено одним или более азимутальными пропульсивными агрегатами и/или одним или более стационарными пропульсивными агрегатами.
Изобретение и его варианты осуществления не ограничиваются примерами, раскрытыми выше, но могут варьироваться в пределах объема формулы изобретения.
Реферат
Изобретение относится к системе управления для регулирования вибраций пропульсивного агрегата судна. Пропульсивный агрегат содержит рамную конструкцию, имеющую верхнюю часть, образующую опорный рычаг, выступающий наружу из корпуса судна, и нижнюю часть, образующую продольное отделение, снабженное гребным валом, имеющим по меньшей мере один присоединенный винт, и первый электромотор, выполненный с возможностью приведения в действие гребного вала. Для регулирования вибраций пропульсивного агрегата измеряют вибрации с помощью по меньшей мере одного измерительного устройства и на основе сигнала измеренных вибраций формируют первый вспомогательный сигнал регулирования крутящего момента. Прибавляют первый вспомогательный сигнал регулирования крутящего момента к первому сигналу регулирования крутящего момента, генерируемому первым контроллером крутящего моменте первого электромотора. Первый вспомогательный сигнал регулирования крутящего момента действует против измеренных вибраций с целью снижения вибраций. Достигается подавление появления вибраций. 2 н. и 13 з.п. ф-лы, 6 ил.
Комментарии