Устройство управления транспортного средства - RU2729868C1
Код документа: RU2729868C1
Чертежи
Описание
Область техники
[0001] Настоящее изобретение относится к устройству управления транспортного средства и относится к управлению транспортным средством, допускающим выполнение движения в режиме автономного вождения.
Уровень техники
[0002] Известно транспортное средство, которое допускает выполнение движения в режиме автономного вождения, в котором, по меньшей мере, часть движения транспортного средства выполняется независимо от операции водителя. Транспортное средство раскрывается в публикации заявки на патент Японии № 2016-200986 (JP 2016-200986 А). Согласно JP 2016-200986 A, когда неисправность транспортного средства возникает во время движения в режиме автономного вождения, транспортное средство останавливается после перемещения в предписанное место отворота, и затем движение в режиме автономного вождения завершается.
Сущность изобретения
[0003] В случае если неисправность возникает в транспортном средстве, раскрытом в JP 2016-200986 А, во время движения в режиме автономного вождения, и неисправность связана с системой управления переключением передач, перемещение транспортного средства в предписанное место отворота может возможно ухудшать удобство движения в режиме автономного вождения.
[0004] Настоящее изобретение предоставляет устройство управления для транспортного средства, допускающего выполнение движения в режиме автономного вождения, причем устройство управления повышает удобство движения в режиме автономного вождения, когда неисправность возникает в системе управления переключением передач.
[0005] Устройство управления транспортного средства согласно одному аспекту настоящего изобретения применяется к транспортному средству, включающему в себя, по меньшей мере, систему управления переключением передач, выполненную с возможностью переключать диапазон движения. Устройство управления транспортного средства выполнено с возможностью управлять транспортным средством таким образом, чтобы выполнять движение в режиме автономного вождения независимо от операции водителя в, по меньшей мере, одной операции вождения. Устройство управления транспортного средства включает в себя контроллер. Контроллер выполнен с возможностью определять правильность движения посредством движения в режиме автономного вождения согласно типу неисправности, которая возникает в системе управления переключением передач. Контроллер выполнен с возможностью выполнять управление движением транспортного средства согласно правильности движения за счет движения в режиме автономного вождения. Устройство управления транспортным средством в соответствии с одним аспектом настоящего изобретения может быть сконфигурировано для управления транспортным средством для выполнения автономного движения при вождении к целевому местоположению без зависимости от операции водителя в по меньшей мере одной операции вождения. Контроллер может быть сконфигурирован для определения правильности движения посредством автономного движения вождения в соответствии с тем, является ли неисправность, возникающая в системе управления переключением передач, неисправностью, которая не препятствует достижению транспортным средством целевого местоположения.
[0006] Устройство управления транспортного средства согласно одному аспекту настоящего изобретения обеспечивает возможность транспортному средству двигаться в целевое местоположение посредством движения в режиме автономного вождения, в зависимости от типа неисправности, которая возникает в системе управления переключением передач. Соответственно, определение правильности движения в режиме автономного вождения согласно тому, что неисправность при управлении переключением передач является неисправностью, которая не препятствует достижению транспортным средством целевого местоположения, позволяет ограничивать отмену движения в режиме автономного вождения больше, чем требуется. Это увеличивает сценарии, в которых выполняется движение в режиме автономного вождения, и в силу этого удобство движения в режиме автономного вождения повышается.
[0007] Устройство управления транспортного средства согласно одному аспекту настоящего изобретения может применяться к транспортному средству, выполненному с возможностью обеспечивать переключение между движением в режиме автономного вождения и движением в режиме вождения вручную, при котором транспортное средство управляется таким образом, что оно движется посредством операции водителя. Когда неисправность в системе управления переключением передач представляет собой неисправность, которая не препятствует достижению, посредством транспортного средства, целевого местоположения, контроллер может быть выполнен с возможностью определять то, что движение в режиме автономного вождения является возможным, или определять то, что переключение с движения в режиме вождения вручную на движение в режиме автономного вождения является возможным.
[0008] Когда неисправность возникает в системе управления переключением передач, но неисправность представляет собой неисправность, которая не препятствует достижению, посредством транспортного средства, целевого местоположения, устройство управления транспортного средства согласно одному аспекту настоящего изобретения определяет то, что продолжение движения в режиме автономного вождения является возможным, или определяет то, что переключение с движения в режиме вождения вручную на движение в режиме автономного вождения является возможным. Это увеличивает сценарии, в которых выполняется движение в режиме автономного вождения, и в силу этого удобство движения в режиме автономного вождения повышается.
[0009] В устройстве управления транспортного средства согласно одному аспекту настоящего изобретения, когда неисправность, которая представляет собой сбой при переключении на диапазон парковки, возникает во время движения в режиме автономного вождения, контроллер может быть выполнен с возможностью определять то, что движение в режиме автономного вождения транспортного средства в целевое местоположение является возможным.
[0010] Даже когда переключение на диапазон парковки сбоит во время движения в режиме автономного вождения, устройство управления транспортного средства согласно одному аспекту настоящего изобретения обеспечивает возможность транспортному средству достигать предварительно установленного целевого местоположения посредством движения в режиме автономного вождения. Следовательно, даже когда неисправность, которая представляет собой сбой при переключении на диапазон парковки, возникает во время движения в режиме автономного вождения, определяется то, что транспортное средство может выполнять движение в режиме автономного вождения в целевое местоположение. Соответственно, поскольку движение в режиме автономного вождения продолжается, удобство движения в режиме автономного вождения повышается.
[0011] В устройстве управления транспортного средства согласно одному аспекту настоящего изобретения, контроллер может быть выполнен с возможностью прогнозировать то, выполняется или нет переключение переднего-заднего хода при последующем движении. Когда неисправность, которая представляет собой сбой при переключении переднего-заднего хода, возникает во время движения в режиме автономного вождения, и контроллер прогнозирует то, что переключение переднего-заднего хода не выполняется при последующем движении, контроллер может быть выполнен с возможностью определять то, что движение в режиме автономного вождения транспортного средства в целевое местоположение является возможным.
[0012] В устройстве управления транспортного средства согласно одному аспекту настоящего изобретения, даже в случае, если неисправность, которая представляет собой сбой при переключении переднего-заднего хода, возникает во время движения в режиме автономного вождения, транспортное средство может достигать целевого местоположения посредством движения в режиме автономного вождения, когда прогнозируется то, что переключение переднего-заднего хода не выполняется при последующем движении. Следовательно, даже в случае, если неисправность, которая представляет собой сбой при переключении переднего-заднего хода, возникает во время движения в режиме автономного вождения, определяется то, что движение в режиме автономного вождения транспортного средства в целевое местоположение является возможным, когда прогнозируется то, что переключение переднего-заднего хода не выполняется при последующем движении. Соответственно, поскольку движение в режиме автономного вождения продолжается, удобство движения в режиме автономного вождения повышается.
[0013] В устройстве управления транспортного средства согласно одному аспекту настоящего изобретения, система управления переключением передач может быть выполнена с возможностью переключать диапазон переключения передач через два или более трактов связи. Когда неисправность возникает в одном из трактов связи, контроллер может быть выполнен с возможностью определять то, что движение в режиме автономного вождения в целевое местоположение транспортного средства является возможным.
[0014] В устройстве управления транспортного средства согласно одному аспекту настоящего изобретения, когда неисправность возникает в одном из трактов связи во время движения в режиме автономного вождения в конфигурации, в которой диапазон переключения передач может переключаться через два или более трактов связи, транспортное средство может достигать целевого местоположения посредством движения в режиме автономного вождения с использованием тракта связи, который работает нормально. Следовательно, даже когда неисправность возникает в одном из трактов связи во время движения в режиме автономного вождения, определяется то, что движение в режиме автономного вождения транспортного средства в целевое местоположение является возможным. Соответственно, поскольку движение в режиме автономного вождения продолжается, удобство движения в режиме автономного вождения повышается.
[0015] В устройстве управления транспортного средства согласно одному аспекту настоящего изобретения, когда неисправность, которая представляет собой сбой при переключении на диапазон парковки, возникает во время движения в режиме вождения вручную, и затем водитель выполняет операцию переключения на движение в режиме автономного вождения, контроллер может быть выполнен с возможностью определять то, что переключение на движение в режиме автономного вождения является возможным.
[0016] Даже когда переключение на диапазон парковки сбоит, устройство управления транспортного средства согласно одному аспекту настоящего изобретения обеспечивает возможность транспортному средству достигать целевого местоположения посредством движения в режиме автономного вождения. Следовательно, когда операция переключения на движение в режиме автономного вождения выполняется, даже если неисправность, которая представляет собой сбой при переключении на диапазон парковки, возникает во время движения в режиме вождения вручную, определяется то, что переключение на движение в режиме автономного вождения является возможным. Поскольку движение в режиме вождения вручную переключается на движение в режиме автономного вождения, удобство движения в режиме автономного вождения повышается.
[0017] В устройстве управления транспортного средства согласно одному аспекту настоящего изобретения, в случае если неисправность, которая представляет собой сбой при переключении переднего-заднего хода, возникает во время движения в режиме вождения вручную, и затем водитель выполняет операцию переключения на движение в режиме автономного вождения, контроллер может быть выполнен с возможностью определять то, что переключение на движение в режиме автономного вождения является возможным, когда контроллер прогнозирует то, что переключение переднего-заднего хода не выполняется при последующем движении.
[0018] В устройстве управления транспортного средства согласно одному аспекту настоящего изобретения, даже в случае, если возникает неисправность, которая представляет собой сбой при переключении переднего-заднего хода, транспортное средство может достигать целевого местоположения посредством автономного вождения, когда прогнозируется то, что переключение переднего-заднего хода не выполняется при последующем движении. Следовательно, когда операция переключения на движение в режиме автономного вождения выполняется, даже если неисправность, которая представляет собой сбой при переключении переднего-заднего хода, возникает во время движения в режиме вождения вручную, определяется то, что переключение на движение в режиме автономного вождения является возможным, когда прогнозируется то, что переключение переднего-заднего хода не выполняется при последующем движении. Соответственно, поскольку переключение на движение в режиме автоматизированного вождения выполняется, удобство движения в режиме автоматизированного вождения повышается.
Краткое описание чертежей
[0019] Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичными ссылочными позициями обозначены аналогичные элементы. На чертежах:
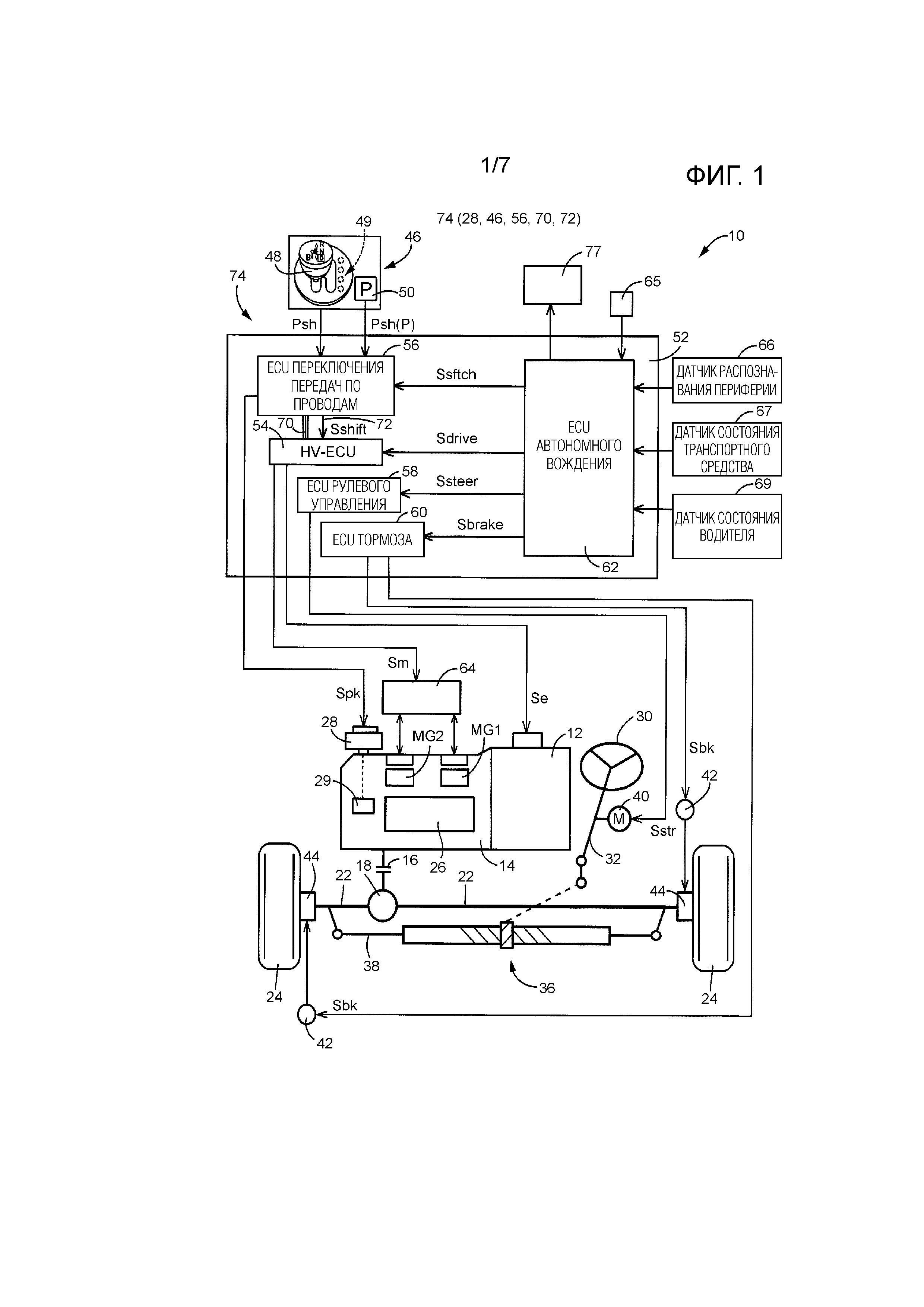
Фиг. 1 показывает схематичную конфигурацию гибридного транспортного средства, к которому применяется настоящее изобретение, при показе главной части системы управления, предоставляемой для управления каждым модулем транспортного средства;
Фиг. 2 является функциональной блок-схемой, иллюстрирующей главную часть функций управления ECU, составляющих электронное устройство управления по фиг. 1;
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей операцию управления, из числа операций управления электронного устройства управления по фиг. 2, для продолжения автономной парковки, чтобы повышать удобство, даже в случае, если неисправность возникает в системе, которая переключает диапазон переключения передач во время автономной парковки;
Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей операцию управления, из числа операций управления электронного устройства управления по фиг. 2, для продолжения движения в режиме автономного вождения, чтобы повышать удобство, даже в случае, если неисправность возникает в системе, которая переключает диапазон переключения передач во время движения в режиме автономного вождения;
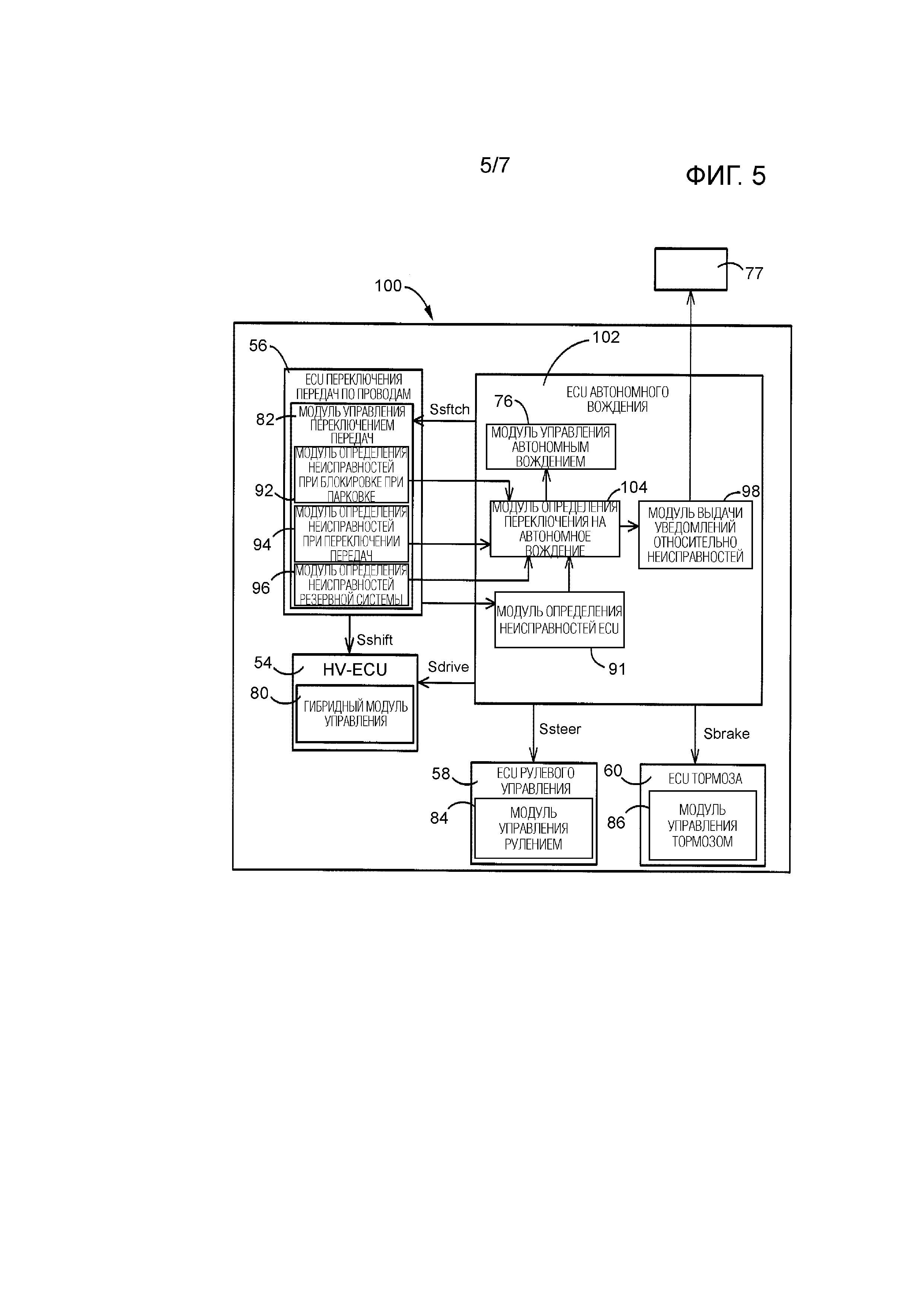
Фиг. 5 является функциональной блок-схемой, иллюстрирующей функцию управления электронного устройства управления, которое представляет собой другой вариант осуществления настоящего изобретения;
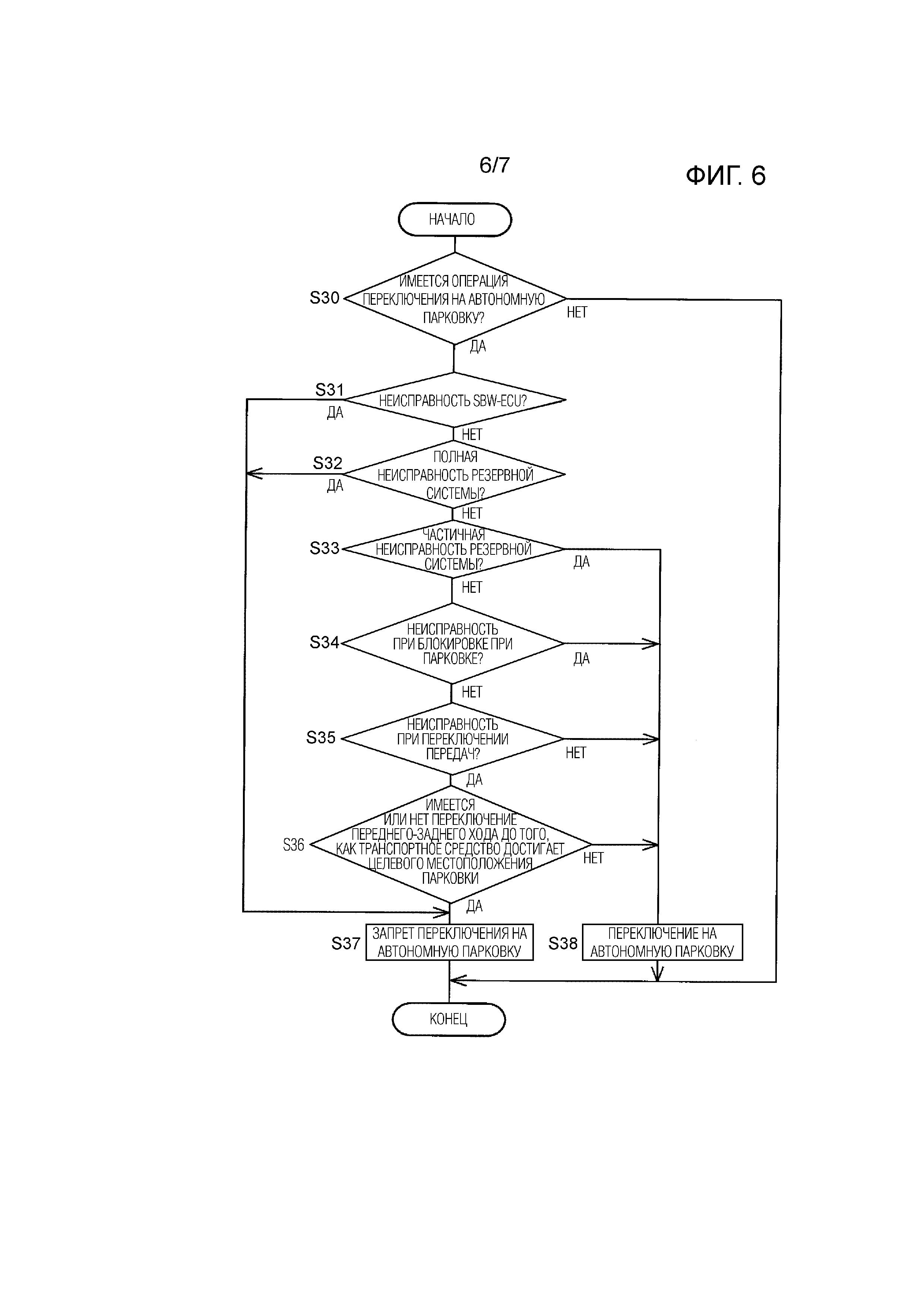
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей операцию управления, из числа операций управления электронного устройства управления по фиг. 5, в случае если неисправность возникает в системе, которая переключает диапазон переключения передач во время движения в режиме вождения вручную и во время парковки транспортного средства, в частности; и
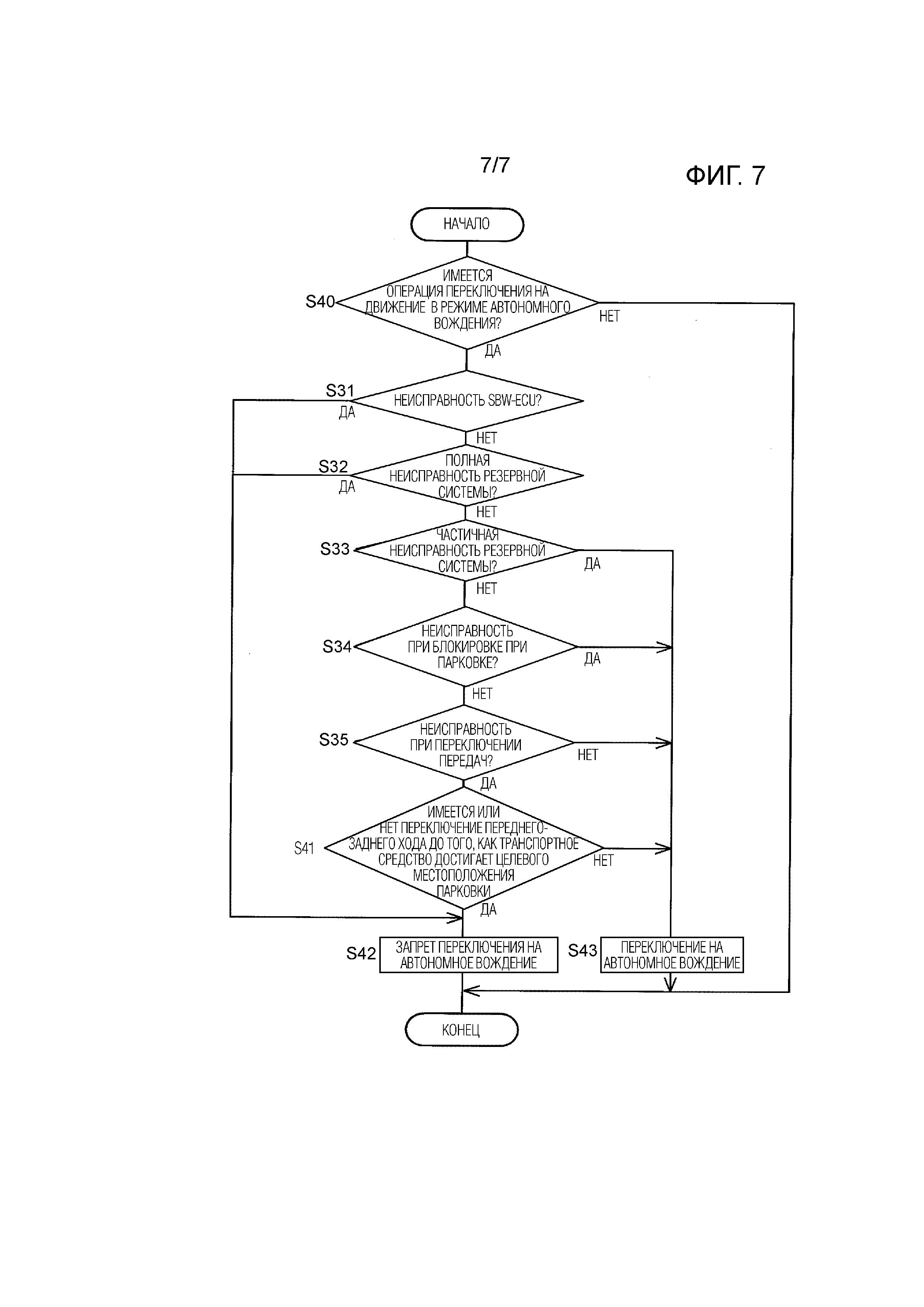
Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей операцию управления, из числа операций управления электронного устройства управления по фиг. 5, в случае если неисправность возникает в системе, которая переключает диапазон переключения передач во время движения в режиме вождения вручную и во время выполнения движения в режиме автономного вождения, в частности.
Подробное описание вариантов осуществления изобретения
[0020] Ниже подробно описываются варианты осуществления настоящего изобретения со ссылкой на прилагаемые чертежи. В нижеприведенных вариантах осуществления, чертежи упрощаются или искажаются по мере необходимости, и в силу этого подробности каждого компонента, такие как пропорция и форма, могут отличаться от пропорции и формы реальных компонентов.
[0021] Фиг. 1 показывает схематичную конфигурацию гибридного транспортного средства 10, к которому применяется настоящее изобретение, при показе главной части системы управления, предоставляемой для управления каждым модулем транспортного средства 10. Транспортное средство 10 включает в себя двигатель 12 в качестве источника движущей силы для движения, блок 14 трансмиссии, блок 18 дифференциала, который принимает мощность, расходуемую на движение, передаваемую через выходную шестерню 16 блока 14 трансмиссии, пару из правой и левой оси 22 и пару из правого и левого передних колес 24.
[0022] Например, блок 14 трансмиссии представляет собой узел "мост-коробка передач" с приводом на передние колеса и с передним расположением двигателя (FF), который располагается крестообразно в транспортном средстве 10. Блок 14 трансмиссии включает в себя первый электромотор MG1, механизм 26 распределения мощности, расходуемой на движение, который распределяет мощность, расходуемую на движение, передаваемую из двигателя 12, в первый электромотор MG1 и выходную шестерню 16 и второй электромотор MG2, сцепленный с выходной шестерней 16 таким образом, чтобы иметь возможность передавать мощность, расходуемую на движение, в выходную шестерню 16. Блок 14 трансмиссии включает в себя известный механизм 29 блокировки при парковке, который приводится в действие посредством актуатора 28, с тем чтобы механически прекращать вращение передних колес 24.
[0023] Например, первый электромотор MG1 и второй электромотор MG2 представляют собой синхронные электромоторы, включающие в себя, по меньшей мере, одно из функции в качестве электромотора, заданного с возможностью формировать механическую движущую силу из электрической энергии, и функции в качестве электрического генератора, чтобы формировать электрическую энергию из механической движущей силы. Предпочтительно, первый электромотор MG1 и второй электромотор MG2 представляют собой электромоторы-генераторы, избирательно работающие в качестве электромотора или электрического генератора. Например, первый электромотор MG1 включает в себя функцию генератора, чтобы принимать противодействующую силу двигателя 12, и функцию электромотора, чтобы вращательно приводить в действие двигатель 12, который находится в состоянии прекращения работы. Второй электромотор MG2 включает в себя функцию электромотора, чтобы выступать в качестве электромотора для движения, которое задается с возможностью выводить движущую силу в качестве источника движущей силы для движения, и функцию выработки электрической мощности, чтобы формировать электрическую энергию посредством рекуперации с использованием движущей силы при заднем ходе со стороны передних колес 24.
[0024] В транспортном средстве 10, мощность, расходуемая на движение, двигателя 12 передается в выходную шестерню 16 через механизм 26 распределения мощности, расходуемой на движение, и мощность, расходуемая на движение, передается на правое и левое передние колеса 24 через блок 18 дифференциала и ось 22. Мощность, расходуемая на движение, второго электромотора MG2 передается в выходную шестерню 16, и мощность, расходуемая на движение, передается на правое и левое передние колеса 24 через блок 18 дифференциала и ось 22.
[0025] Руль 30 управляется водителем. Когда водитель вращает руль 30, вращение передается в редуктор 36 через рулевой вал 32, который сцепляется с рулем 30. В редукторе 36, вращение рулевого вала 32 преобразуется в движение справа налево поперечной рулевой тяги 38, которая сцепляется с редуктором 36. По мере того, как поперечная рулевая тяга 38 перемещается в направлении справа налево, угол правого и левого передних колес 24 изменяется. Рулевой вал 32 содержит электромотор 40 таким образом, что мощность, расходуемая на движение, может передаваться в рулевой вал 32. Электромотор 40 задается с возможностью функционировать в качестве системы электрического усилителя рулевого управления для помощи при операции водителя. Электромотор 40 помогает при операции водителя. Помимо этого, когда выполняется движение в режиме автономного вождения, электромотор 40 может изменять угол правого и левого передних колес 24 посредством автоматического вращения рулевого вала 32.
[0026] Правое и левое передние колеса 24 содержат колесный тормоз 44, к которому прикладывается тормозная сила посредством регулирования гидравлического давления гидравлической жидкости, подаваемой в тормозной гидравлический цилиндр 42. Гидравлическое давление гидравлической жидкости в тормозном гидравлическом цилиндре 42 увеличивается пропорционально силе ноги, прикладываемой к педали тормоза водителем. Тормозная сила, сформированная в колесных тормозах 44, увеличивается пропорционально гидравлическому давлению гидравлической жидкости. Гидравлическое давление гидравлической жидкости в тормозном гидравлическом цилиндре 42 также управляется посредством тормозного сигнала Sbk, выводимого из нижеописанного ECU 60 тормоза. Соответственно, тормозная сила может прикладываться к передним колесам 24 согласно состоянию движения транспортного средства 10. Во время движения в режиме автономного вождения, гидравлическое давление гидравлической жидкости в тормозном гидравлическом цилиндре 42 управляется на основе тормозного сигнала Sbk, выводимого из ECU 60 тормоза. Соответствующая тормозная сила прикладывается из колесного тормоза 44 согласно состоянию движения транспортного средства 10. Задние колеса, которые не проиллюстрированы, также оснащаются колесными тормозами 44, идентичными колесным тормозам передних колес 24.
[0027] Функциональное устройство 46 переключения передач предоставляется в позиции, в которой водитель может управлять. Функциональное устройство 46 переключения передач включает в себя рычаг 48 мгновенного переключения передач, который управляется во множество рабочих позиций Psh переключения передач, и P-переключатель 50. Рычаг 48 мгновенного переключения передач представляет собой механизм, который обеспечивает возможность рычагу 48 переключения передач возвращаться в предварительно установленную исходную позицию, после того как водитель прекращает операцию с рычагом 48 переключения передач.
[0028] Рычаг 48 переключения передач имеет такую конфигурацию, в которой рабочая позиция Psh переключения передач управляется в R-позицию, которая представляет собой позицию движения задним ходом (заднего хода), N-позицию, которая представляет собой позицию нейтрали, D-позицию, которая представляет собой позицию движения передним ходом (при движении), и B-позицию, которая представляет собой позицию тормоза двигателя. Когда водитель переключает рычаг 48 переключения передач в R-позицию, блок 14 трансмиссии переключается на диапазон движения задним ходом (R-диапазон) для движения задним ходом транспортного средства 10. Когда водитель переключает рычаг 48 переключения передач в N-позицию, блок 14 трансмиссии переключается на диапазон нейтрали (N-диапазон), в котором линия передачи мощности в блоке 14 трансмиссии прерывается. Когда водитель переключает рычаг 48 переключения передач в D-позицию, блок 14 трансмиссии переключается на диапазон движения передним ходом (D-диапазон) для движения передним ходом транспортного средства 10. Когда водитель переключает рычаг 48 переключения передач в B-позицию, блок 14 трансмиссии переключается на диапазон торможения двигателем, заданный с возможностью формировать торможение двигателем.
[0029] P-переключатель 50, например, представляет собой нажимной кнопочный переключатель. Когда P-переключатель 50 нажимается, и транспортное средство 10 удовлетворяет предписанному условию, такому как нахождение транспортного средства 10 в остановленном состоянии или очень низкая скорость V транспортного средства, механизм 29 блокировки при парковке работает через актуатор 28 с электроприводом. За один раз, по мере того, как вращение выходной шестерни 16 механически прекращается, передние колеса 24, которые механически сцепляются с выходной шестерней 16, также прекращают свое вращение. Таким образом, блок 14 трансмиссии переключается на диапазон парковки (P-диапазон) для парковки транспортного средства 10.
[0030] Транспортное средство 10 использует так называемую "систему переключения передач по проводам". В системе переключения передач по проводам, рычаг 48 переключения передач функционального устройства 46 переключения передач электрически соединяется с блоком 14 трансмиссии через провод (линию связи), вместо механического сцепления с блоком 14 трансмиссии.
[0031] В функциональном устройстве 46 переключения передач, предоставляются четыре IC 49 Холла, показанные с помощью пунктирной линии. IC 49 Холла функционируют в качестве датчиков для обнаружения рабочей позиции Psh переключения передач. Когда водитель управляет рычагом 48 переключения передач, непроиллюстрированные магниты, которые прикрепляются к рычагу 48 переключения передач, изменяют свои соответствующие позиции относительно IC 49 Холла, и в силу этого значения напряжения, выводимые из IC 49 Холла, изменяются. Здесь, значения напряжения, полученные, когда рычаг 48 переключения передач переключается в соответствующие рабочие позиции Psh переключения передач, вычисляются и сохраняются заранее для каждой из IC 49 Холла. Соответственно, когда значения напряжения соответствующих IC 49 Холла определяются, рабочая позиция Psh переключения передач рычага 48 переключения передач определяется. Значения напряжения для рабочих позиций Psh переключения передач IC 49 Холла задаются с предписанной шириной с учетом варьирования компонентов и т.п.
[0032] Транспортное средство 10 включает в себя множество ECU, которые функционируют в качестве электронного устройства 52 управления (контроллера), выполненного с возможностью управлять каждым модулем транспортного средства 10. Электронное устройство 52 управления включает в себя HV-ECU 54, ECU 56 переключения передач по проводам, ECU 58 рулевого управления, ECU 60 тормоза и ECU 62 автономного вождения. HV-ECU 54 служит для управления гибридным вождением, связанного с двигателем 12, первым электромотором MG1, вторым электромотором MG2 и т.п. ECU 56 переключения передач по проводам управляет диапазоном движения (диапазоном переключения передач) блока 14 трансмиссии. ECU 58 рулевого управления управляет электромотором 40, который составляет систему электрического усилителя рулевого управления. ECU 60 тормоза управляет тормозным гидравлическим цилиндром 42, который регулирует тормозную силу колесных тормозов 44. ECU 62 автономного вождения выполняет нижеописанное движение в режиме автономного вождения (управление автономным вождением). ECU сконфигурированы посредством включения в конструкцию так называемого микрокомпьютера, включающего в себя CPU, RAM, ROM и интерфейс ввода-вывода. CPU выполняет множество видов управления транспортным средством 10 посредством выполнения обработки сигналов согласно программам, предварительно сохраненным в ROM, при одновременном использовании функции временного хранения RAM.
[0033] HV-ECU 54 имеет функцию вывода движущей силы, запрашиваемой водителем, при управлении двигателем 12, первым электромотором MG1 и вторым электромотором MG2 согласно состоянию движения транспортного средства таким образом, чтобы достигать оптимальной эффективности использования топлива. HV-ECU 54 выводит такие сигналы, как сигнал Se команды управления выходной мощностью двигателя для управления выходной мощностью двигателя 12 и сигнал Sm команды управления электромотором, выводимый в инвертор 64 для управления приведением в действие первого электромотора MG1 и второго электромотора MG2.
[0034] ECU 56 переключения передач по проводам имеет функцию обнаружения рабочей позиции Psh переключения передач на основе сигналов, указывающих рабочую позицию Psh переключения передач, выводимых из IC 49 Холла функционального устройства 46 переключения передач, и переключения диапазона переключения передач блока 14 трансмиссии на основе обнаруженной рабочей позиции Psh переключения передач. Например, когда рычаг 48 переключения передач переключается в D-позицию, ECU 56 переключения передач по проводам выводит сигнал Sshift переключения передач для переключения диапазона переключения передач на диапазон переднего хода для переднего хода транспортного средства 10, в HV-ECU 54. При приеме сигнала, HV-ECU 54 выводит сигнал Se команды управления выходной мощностью двигателя и сигнал Sm команды управления электромотором для переднего хода транспортного средства 10. Например, когда P-переключатель 50 нажимается, ECU 56 переключения передач по проводам выводит сигнал Spk команды управления блокировкой при парковке для приведения в действие актуатора 28, с тем чтобы управлять механизмом 29 блокировки при парковке таким образом, чтобы переключать диапазон переключения передач транспортного средства 10 на диапазон парковки.
[0035] Здесь, HV-ECU 54 и ECU 56 переключения передач по проводам соединяются через две линии связи, включающие в себя линию 70 CAN-связи и локальную линию 72. Соответственно, HV-ECU 54 и ECU 56 переключения передач по проводам имеют такую конфигурацию, в которой когда одна из линии связи отсоединяется, сигнал команды управления по-прежнему может передаваться через другую линию связи. Вкратце, HV-ECU 54 и ECU 56 переключения передач по проводам имеют такую конфигурацию, в которой диапазон переключения передач может переключаться через два тракта связи (командных тракта). Линия 70 CAN-связи и локальная линия 72 соответствуют двум или более трактов связи настоящего изобретения.
[0036] ECU 58 рулевого управления имеет функцию формирования вспомогательной силы, соответствующей углу θwheel поворота при рулении, соответствующему рабочей величине поворота руля 30, управляемого водителем, и скорости V транспортного средства. Когда водитель поворачивает руль 30, ECU 58 рулевого управления выводит сигнал Sstr команды управления усилением для формирования вспомогательной силы, соответствующей рабочей величине поворота руля 30, в электромотор 40.
[0037] ECU 60 тормоза имеет функцию формирования тормозной силы, соответствующей состоянию движения, посредством управления гидравлическим давлением тормозного гидравлического цилиндра 42. Например, при определении того, что выполняется экстренное торможение, на основе скорости нажатия педали тормоза и т.п., ECU 60 тормоза выводит тормозной сигнал Sbk для увеличения гидравлического давления тормозного гидравлического цилиндра 42, чтобы повышать тормозную силу.
[0038] Когда режим движения переключается на движение в режиме автономного вождения, ECU 62 автономного вождения управляет транспортным средством 10 таким образом, что оно движется к предварительно установленному целевому местоположению, т.е. управляет транспортным средством 10 таким образом, чтобы выполнять движение в режиме автономного вождения, которое не зависит от операции водителя, на основе такой информации, как целевое местоположение (информация целевого местоположения) и текущее местоположение (информация текущего местоположения). ECU 62 автономного вождения имеет функцию автономной парковки в целевом местоположении парковки (целевой парковочной рамке), указываемом заранее, когда режим движения переключается на движение в режиме автономного вождения во время парковки транспортного средства 10. Целевое местоположение представляет собой пункт назначения, требуемый водителем, причем пункт назначения предварительно устанавливается водителем. Целевое местоположение парковки представляет собой парковочную рамку, которая указывается водителем во время парковки транспортного средства 10 или автоматически указывается на основе информации текущего местоположения и т.п. Целевое местоположение парковки представляет собой один аспект целевого местоположения.
[0039] Режим движения переключается на движение в режиме автономного вождения и автономную парковку посредством включения (переключения на сторону движения в режиме автономного вождения) селекторного переключателя 65 автономного вождения, предоставленного около водительского сиденья, водителем. Когда селекторный переключатель 65 автономного вождения выключается (переключается на сторону движения в режиме вождения вручную) во время движения в режиме автономного вождения и автономной парковки, и когда любое из руля 30, педали акселератора и педали тормоза нажимается водителем во время движения в режиме автономного вождения и автономной парковки, движение в режиме автономного вождения и автономная парковка переключаются на движение в режиме вождения вручную. Таким образом, транспортное средство 10 выполнено с возможностью обеспечивать переключение между движением в режиме вождения вручную и движением в режиме автономного вождения. Движение в режиме вождения вручную соответствует общему движению, при котором транспортное средство 10 задается с возможностью двигаться посредством операции водителя.
[0040] ECU 62 автономного вождения принимает различные фрагменты информации относительно окрестности транспортного средства 10, такие как присутствие помех вокруг транспортного средства 10 и присутствие транспортных средств, движущихся с передней, задней, правой и левой сторон относительно транспортного средства 10, из датчика 66 распознавания периферии (такого как инфракрасный датчик, камера, радар среднего и дальнего действия и т.п.). ECU 62 автономного вождения также принимает различные фрагменты информации, указывающие состояние транспортного средства, из датчика 67 состояния транспортного средства. Информация включает в себя частоту Ne вращения двигателя для двигателя 12, открытие θth дросселя, диапазон переключения передач блока 14 трансмиссии, частоту Nmg1 вращения первого электромотора MG1, частоту Nmg2 вращения второго электромотора MG2, скорость V транспортного средства и угол θwheel поворота при рулении руля 30. ECU 62 автономного вождения также принимает информацию относительно операции водителем (операции водителя), такой как нажатие педали акселератора, нажатие педали тормоза и операция поворота руля 30, из датчика 69 состояния водителя. Датчик 66 распознавания периферии состоит из множества датчиков, таких как инфракрасный датчик, камера и радар среднего и дальнего действия. Датчик 67 состояния транспортного средства и датчик 69 состояния водителя также состоят из множества датчиков для обнаружения каждого из параметров.
[0041] ECU 62 автономного вождения выводит сигнал Sdrive команды управления движущей силой для регулирования движущей силы во время движения в режиме автономного вождения в HV-ECU 54, сигнал Ssftch команды управления переключением диапазона переключения передач для переключения диапазона переключения передач во время движения в режиме автономного вождения в ECU 56 переключения передач по проводам, сигнал Ssteer команды управления рулением для регулирования угла θwheel поворота при рулении руля 30 во время движения в режиме автономного вождения в ECU 58 рулевого управления и сигнал Sbrake команды управления тормозной силой для регулирования тормозной силы колесных тормозов 44 во время движения в режиме автономного вождения в ECU 60 тормоза.
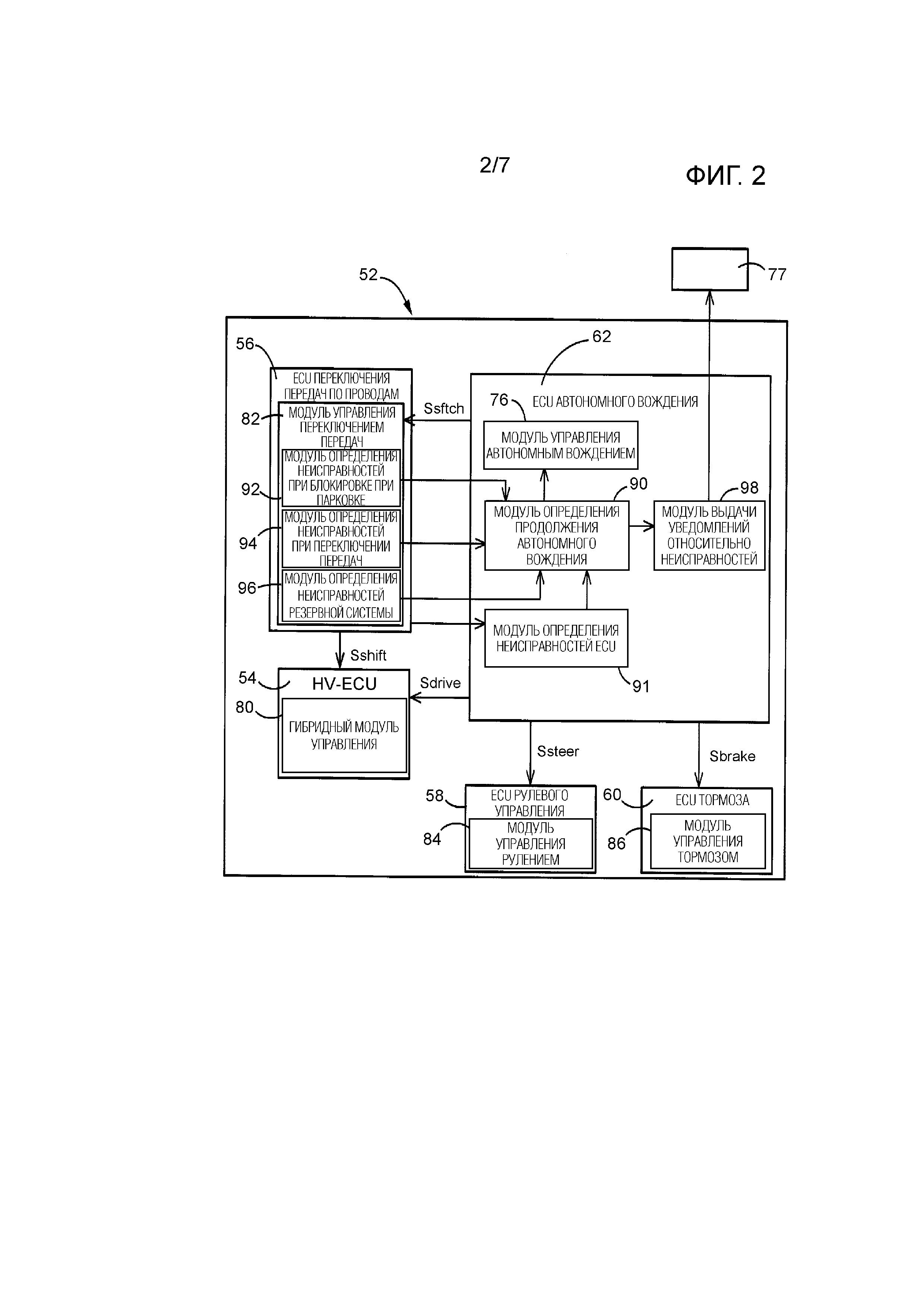
[0042] Фиг. 2 является функциональной блок-схемой, иллюстрирующей главную часть функций управления ECU, составляющих электронное устройство 52 управления по фиг. 1.
[0043] HV-ECU 54 функционально включает в себя гибридный модуль 80 управления, выполненный с возможностью управлять выходной мощностью двигателя 12, первого электромотора MG1 и второго электромотора MG2 таким образом, что выводится запрашиваемая движущая сила на основе диапазона переключения передач блока 14 трансмиссии, скорости V транспортного средства, рабочей величины нажатия педали акселератора и т.п.
[0044] ECU 56 переключения передач по проводам функционально включает в себя модуль 82 управления переключением передач, выполненный с возможностью переключать диапазон переключения передач блока 14 трансмиссии на основе рабочей позиции Psh переключения передач, переключаемой посредством функционального устройства 46 переключения передач. Модуль 82 управления переключением передач также имеет функцию переключения диапазона переключения передач на диапазон парковки посредством управления актуатором 28 с электроприводом таким образом, чтобы управлять механизмом 29 блокировки при парковке, когда P-переключатель 50 нажимается. ECU 56 переключения передач по проводам, актуатор 28, который приводит в действие механизм 29 блокировки при парковке, функциональное устройство 46 переключения передач, линия 70 CAN-связи и локальная линия 72 составляют систему 74 управления переключением передач, выполненную с возможностью переключать диапазон переключения передач блока 14 трансмиссии.
[0045] ECU 58 рулевого управления функционально включает в себя модуль 84 управления рулением, который управляет электромотором 40 таким образом, чтобы формировать вспомогательную силу, соответствующую рабочей величине поворота руля 30, управляемого водителем, и скорости V транспортного средства.
[0046] ECU 60 тормоза функционально включает в себя модуль 86 управления тормозом, выполненный с возможностью увеличивать тормозную силу посредством увеличения гидравлического давления тормозного гидравлического цилиндра 42, когда, например, выполняется экстренное торможение, или прикладывать тормозную силу к предписанному колесу таким образом, чтобы ограничивать боковое скольжение транспортного средства во время движения в повороте.
[0047] ECU 62 автономного вождения функционально включает в себя модуль 76 управления автономным вождением, выполненный с возможностью управлять движением транспортного средства 10, когда режим движения переключается на движение в режиме автономного вождения. Модуль 76 управления автономным вождением выполняет движение в режиме автономного вождения транспортного средства 10 в целевое местоположение и выполняет автономную парковку транспортного средства 10 в указанном целевом местоположении парковки. Когда режим движения переключается на движение в режиме автономного вождения в ходе движения, модуль 76 управления автономным вождением выполняет движение в режиме автономного вождения транспортного средства 10 к предварительно установленному целевому местоположению. В частности, модуль 76 управления автономным вождением подготавливает соответствующий намеченный путь движения в целевое местоположение на основе целевого местоположения, текущего местоположения и т.п., со ссылкой на предварительно сохраненную картографическую информацию. Согласно подготовленному намеченному пути движения, модуль 76 управления автономным вождением выполняет движение в режиме автономного вождения транспортного средства 10. Когда целевое местоположение парковки задается, модуль 76 управления автономным вождением выполняет автономную парковку (управление автономной парковкой) таким образом, что транспортное средство 10 может парковаться в целевом местоположении парковки. Автономная парковка представляет собой один аспект движения в режиме автономного вождения. Модуль 76 управления автономным вождением соответствует модулю управления настоящего изобретения.
[0048] Модуль 76 управления автономным вождением вычисляет, для соответствующего движения транспортного средства 10, различные запрашиваемые значения (целевые значения), такие как значение диапазона переключения передач блока 14 трансмиссии, значение запрашиваемой движущей силы транспортного средства 10, значение угла θwheel поворота при рулении руля 30 и значение тормозной силы колесных тормозов 44, в любое время во время движения в режиме автономного вождения, на основе информации дорожного движения на основе картографической информации и т.п. и различных фрагментов информации относительно окрестности транспортного средства 10, обнаруженных посредством датчика 66 распознавания периферии, с учетом такой информации, как различные фрагменты информации, указывающие состояние транспортного средства, обнаруженные посредством датчика 67 состояния транспортного средства. Когда различные запрашиваемые значения вычисляются, модуль 76 управления автономным вождением выводит, в модуль 82 управления переключением передач, гибридный модуль 80 управления, модуль 84 управления рулением и модуль 86 управления тормозом, команды для задания транспортного средства 10 с возможностью двигаться с вычисленными различными запрашиваемыми значениями в качестве целевых значений.
[0049] Например, когда запрос на переключение передач для переключения диапазона переключения передач блока 14 трансмиссии выводится во время движения в режиме автономного вождения, модуль 76 управления автономным вождением выводит команду для переключения диапазона переключения передач в модуль 82 управления переключением передач. При приеме команды, модуль 82 управления переключением передач выполняет управление для переключения диапазона переключения передач блока 14 трансмиссии.
[0050] Когда запрашиваемая движущая сила транспортного средства 10 вычисляется во время движения в режиме автономного вождения, модуль 76 управления автономным вождением выводит команду для вывода вычисленной запрашиваемой движущей силы в гибридный модуль 80 управления. При приеме команды, гибридный модуль 80 управления управляет двигателем 12, первым электромотором MG1 и вторым электромотором MG2 таким образом, что вычисленная запрашиваемая движущая сила выводится.
[0051] Когда запрашиваемое значение угла θwheel поворота при рулении руля 30 вычисляется, модуль 76 управления автономным вождением выводит в модуль 84 управления рулением команду для управления углом θwheel поворота при рулении руля 30 таким образом, что он составляет вычисленное запрашиваемое значение. При приеме команды, модуль 84 управления рулением приводит в действие электромотор 40 таким образом, чтобы управлять углом θwheel поворота при рулении руля 30 таким образом, что он составляет запрашиваемое значение.
[0052] Когда запрашиваемое значение тормозной силы колесных тормозов 44 вычисляется, модуль 76 управления автономным вождением выводит в модуль 86 управления тормозом команду для управления тормозной силой колесных тормозов 44 таким образом, что она составляет вычисленное запрашиваемое значение. При приеме команды, модуль 86 управления тормозом приводит в действие тормозной гидравлический цилиндр 42 таким образом, чтобы управлять тормозной силой колесных тормозов 44 таким образом, что она составляет запрашиваемое значение. Таким образом, модуль 76 управления автономным вождением выполняет движение в режиме автономного вождения транспортного средства 10, совместно с гибридным модулем 80 управления, модулем 82 управления переключением передач, модулем 84 управления рулением и модулем 86 управления тормозом.
[0053] При выполнении автономной парковки для парковки транспортного средства 10 в указанном целевом местоположении парковки, модуль 76 управления автономным вождением задает намеченный путь движения из текущей позиции транспортного средства 10 в целевое местоположение парковки на основе информации относительно окрестности транспортного средства 10, обнаруженной посредством датчика 66 распознавания периферии, намеченного пути движения, обеспечивающего возможность транспортное средство 10 парковаться в целевом местоположении парковки без созданий препятствий для окружающих помех и т.п. Модуль 76 управления автономным вождением затем управляет транспортным средством 10 таким образом, что оно движется по заданному маршруту движения, так что транспортное средство 10 может автономно парковаться. Во время автономной парковки транспортного средства 10, как и в случае движения в режиме автономного вождения, различные запрашиваемые значения, включающие в себя диапазон переключения передач, запрашиваемую движущую силу, угол θwheel поворота при рулении руля 30 и тормозную силу колесных тормозов 44, вычисляются в любое время, и транспортное средство 10 задается с возможностью двигаться с вычисленными различными запрашиваемыми значениями в качестве целевых значений.
[0054] Теперь, когда неисправность возникает в системе вследствие управления движением транспортного средства совместно с ECU автономного вождения во время движения в режиме автономного вождения (в дальнейшем в этом документе, движение в режиме автономного вождения может включать в себя автономную парковку, если не указано иное), ECU автономного вождения выполняет поиск близлежащего островка безопасности при одновременном управлении транспортным средством таким образом, чтобы перемещаться в искомый островок безопасности, и затем завершает движение в режиме автономного вождения. Островок безопасности представляет собой предварительно заданное место, в котором транспортное средство может безопасно останавливаться. Следовательно, после того, как транспортное средство перемещается в островок безопасности, для транспортного средства становится затруднительным двигаться в целевое местоположение посредством движения в режиме автономного вождения. Соответственно, для перемещения транспортного средства в целевое местоположение или для парковки транспортного средства в целевом местоположении парковки, появляется необходимость для водителя выполнять операцию для движения транспортного средства. Это уменьшает окружение, в котором выполняется движение в режиме автономного вождения, приводя к ухудшению удобства движения в режиме автономного вождения. В случае если, например, неисправность возникает во время парковки транспортного средства в узком целевом местоположении парковки, и автономная парковка в силу этого отменяется, для водителя, который плохо умеет водить, может быть затруднительным парковать транспортное средство, приводя к сбою при парковке в целевом местоположении парковки.
[0055] Соответственно, в настоящем варианте осуществления, когда неисправность, которая возникает во время движения в режиме автономного вождения, связана с системой 74 управления переключением передач, которая переключает диапазон переключения передач блока 14 трансмиссии, можно продолжать движение в режиме автономного вождения и достигать целевого местоположения и целевого местоположения парковки, в зависимости от типа неисправности. Например, даже в случае, если переключение на диапазон парковки посредством управления механизмом 29 блокировки при парковке становится затруднительным, по-прежнему можно переключать диапазон переключения передач, отличный от диапазона парковки. Следовательно, можно выполнять движение в режиме автономного вождения транспортного средства 10 в целевое местоположение и целевое местоположение парковки. Когда переключение переднего-заднего хода становится затруднительным, движение в режиме автономного вождения по-прежнему может выполняться, когда переключение переднего-заднего хода не требуется до того, как транспортное средство достигает целевого местоположения и целевого местоположения парковки. Соответственно, ECU 62 автономного вождения включает в себя функцию определения правильности движения за счет движения в режиме автономного вождения согласно типу неисправности, когда неисправность возникает в системе 74 управления переключением передач, которая переключает диапазон переключения передач блока 14 трансмиссии.
[0056] ECU 62 автономного вождения функционально включает в себя, в дополнение к модулю 76 управления автономным вождением, модуль 90 определения продолжения автономного вождения, выполненный с возможностью определять, когда неисправность возникает в системе 74 управления переключением передач, правильность движения посредством движения в режиме автономного вождения согласно типу неисправности, модуль 91 определения неисправностей ECU, выполненный с возможностью определять неисправность ECU 56 переключения передач по проводам, и модуль 98 выдачи уведомлений относительно неисправностей, выполненный с возможностью уведомлять относительно возникновения неисправности. ECU 56 переключения передач по проводам функционально включает в себя модуль 92 определения неисправностей при блокировке при парковке, модуль 94 определения неисправностей при переключении передач и модуль 96 определения неисправностей резервной системы, выполненный с возможностью определять возникновение различных неисправностей относительно системы 74 управления переключением передач, которая переключает диапазон переключения передач блока 14 трансмиссии. Модуль 90 определения продолжения автономного вождения соответствует модулю определения настоящего изобретения.
[0057] Когда неисправность возникает в системе 74 управления переключением передач во время движения в режиме автономного вождения, модуль 90 определения продолжения автономного вождения определяет то, следует или нет продолжать движение в режиме автономного вождения в зависимости от того, представляет собой неисправность или нет неисправность, которая не препятствует достижению, посредством транспортного средства, целевого местоположения и целевого местоположения парковки посредством движения в режиме автономного вождения. Возникновение неисправности в системе 74 управления переключением передач определяется посредством модуля 91 определения неисправностей ECU, модуля 92 определения неисправностей при блокировке при парковке, модуля 94 определения неисправностей при переключении передач и модуля 96 определения неисправностей резервной системы.
[0058] Модуль 91 определения неисправностей ECU определяет то, возникает или нет неисправность ECU, которая представляет собой сбой при нормальном режиме работы ECU 56 переключения передач по проводам. Когда сигнал не выводится из ECU 56 переключения передач по проводам (ECU выключено), либо когда система самопроверки, включенная в ECU 56 переключения передач по проводам для того, чтобы определять то, работает или нет ECU 56 переключения передач по проводам нормально, определяет то, что ECU 56 переключения передач по проводам не работает нормально, модуль 91 определения неисправностей ECU определяет то, что возникает неисправность ECU, которая представляет собой сбой при нормальном режиме работы ECU 56 переключения передач по проводам. Поскольку модуль 91 определения неисправностей ECU определяет то, работает или нет ECU 56 переключения передач по проводам нормально, модуль 91 определения неисправностей ECU функционально включается в ECU 62 автономного вождения.
[0059] Модуль 92 определения неисправностей при блокировке при парковке (в дальнейшем в этом документе, модуль 92 определения неисправностей при блокировке) определяет то, возникает или нет неисправность (в дальнейшем в этом документе, называемая "неисправностью при блокировке при парковке"), которая представляет собой сбой при переключении на диапазон парковки посредством операции механизма 29 блокировки при парковке. Модуль 92 определения неисправностей при блокировке определяет возникновение неисправности при блокировке при парковке, при обнаружении, например, неисправности в актуаторе 28, который управляет механизмом 29 блокировки при парковке, разъединении линии связи, соединяющейся между ECU 56 переключения передач по проводам и актуатором 28, и такой неисправности, что ECU 56 переключения передач по проводам не может выводить сигнал команды управления для управления актуатором 28.
[0060] Модуль 94 определения неисправностей при переключении передач определяет то, возникает или нет неисправность в переключении диапазона переключения передач, т.е., в частности, неисправность в переключении переднего-заднего хода (в дальнейшем в этом документе, неисправность при переключении передач). Модуль 94 определения неисправностей при переключении передач определяет то, что возникает неисправность при переключении передач, когда, например, сигнал Sshift переключения передач для переключения переднего-заднего хода не выводится из ECU 56 переключения передач по проводам, либо когда сигнал Ssftch команды управления переключением диапазона переключения передач для переключения переднего-заднего хода не выводится из ECU 62 автономного вождения в ECU 56 переключения передач по проводам.
[0061] Модуль 96 определения неисправностей резервной системы определяет то, возникает или нет неисправность (в дальнейшем в этом документе, называемая "неисправностью резервной системы") в одной или в обеих из двух линий связи, соединяющихся между HV-ECU 54 и ECU 56 переключения передач по проводам. Как описано выше, HV-ECU 54 и ECU 56 переключения передач по проводам соединяются через две линии связи, включающие в себя линию 70 CAN-связи и локальную линию 72. При обнаружении неисправности, такой как разъединение, по меньшей мере, в одной из линий связи, модуль 96 определения неисправностей резервной системы определяет то, что возникает неисправность резервной системы. Когда возникает неисправность резервной системы, которая представляет собой сбой в одной из двух линий связи, транспортное средство может двигаться в целевое местоположение и целевое местоположение парковки на основе сигнала команды управления, выводимого через другую линию связи, которая является нормальной.
[0062] Модуль 90 определения продолжения автономного вождения определяет то, следует или нет продолжать движение в режиме автономного вождения, согласно тому, представляет собой неисправность, определенная посредством каждого из модуля 91 определения неисправностей ECU, модуля 92 определения неисправностей при блокировке, модуля 94 определения неисправностей при переключении передач и модуля 96 определения неисправностей резервной системы, или нет неисправность, которая не препятствует достижению, посредством транспортного средства, целевого местоположения и целевого местоположения парковки. Модуль 76 управления автономным вождением выполняет управление движением транспортного средства 10 согласно правильности движения за счет движения в режиме автономного вождения, которая определяется посредством модуля 90 определения продолжения автономного вождения. Например, при определении того, что продолжение движения в режиме автономного вождения является возможным, модуль 76 управления автономным вождением непрерывно выполняет движение в режиме автономного вождения.
[0063] Когда модуль 91 определения неисправностей ECU определяет возникновение неисправности ECU, которая представляет собой сбой при нормальном режиме работы ECU 56 переключения передач по проводам во время движения в режиме автономного вождения, модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения в целевое местоположение и автономной парковки в целевом местоположении парковки является невозможным. Когда возникает неисправность ECU, операция ECU 56 переключения передач по проводам становится нестабильной, и становится затруднительным достигать целевого местоположения и целевого местоположения парковки посредством движения в режиме автономного вождения. В этом случае, модуль 76 управления автономным вождением перемещает транспортное средство 10 в островок безопасности и отменяет движение в режиме автономного вождения.
[0064] Когда модуль 92 определения неисправностей при блокировке определяет возникновение неисправности при блокировке при парковке во время движения в режиме автономного вождения, т.е. когда возникает неисправность, которая представляет собой сбой при переключении на диапазон парковки, модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения в целевое местоположение является возможным. Когда модуль 92 определения неисправностей при блокировке определяет возникновение неисправности при блокировке при парковке во время автономной парковки, модуль 90 определения продолжения автономного вождения определяет то, что продолжение автономной парковки в целевом местоположении парковки является возможным. Когда неисправность при блокировке при парковке возникает во время движения в режиме автономного вождения, переключение на диапазон парковки является невозможным после того, как транспортное средство 10 останавливается. Тем не менее, транспортное средство 10 по-прежнему может достигать целевого местоположения посредством движения в режиме автономного вождения и может достигать целевого местоположения парковки посредством автономной парковки. Следовательно, когда неисправность при блокировке при парковке возникает во время движения в режиме автономного вождения и автономной парковки, модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения и автономной парковки является возможным.
[0065] Поскольку модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения и автономной парковки является возможным, модуль 76 управления автономным вождением непрерывно выполняет движение в режиме автономного вождения и автономную парковку. Следовательно, даже в случае, если возникает неисправность при блокировке при парковке, предотвращается отмена движения в режиме автономного вождения и автономной парковки больше, чем требуется. Соответственно, окружение выполнения движения в режиме автономного вождения и автономной парковки увеличивается, и в силу этого удобство движения в режиме автономного вождения и автономной парковки повышается. Даже в случае, если, например, транспортное средство 10 паркуется в узком целевом местоположении парковки, можно парковать транспортное средство 10 посредством автономной парковки.
[0066] Когда модуль 94 определения неисправностей при переключении передач определяет возникновение неисправности при переключении передач во время движения в режиме автономного вождения, т.е. когда неисправность, которая представляет собой сбой при переключении переднего-заднего хода, возникает во время движения в режиме автономного вождения, и прогнозируется то, что переключение переднего-заднего хода (переключение диапазона переключения передач) выполняется при последующем движении (движении в целевое местоположение), модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения в целевое местоположение является невозможным. В этом случае, модуль 76 управления автономным вождением выполняет поиск близлежащего островка безопасности, который не требует переключения переднего-заднего хода, и выполняет движение в режиме автономного вождения транспортного средства 10 в искомый островок безопасности. Модуль 76 управления автономным вождением затем останавливает транспортное средство 10 и отменяет движение в режиме автономного вождения. Когда модуль 94 определения неисправностей при переключении передач определяет возникновение неисправности при переключении передач во время автономной парковки, и прогнозируется то, что переключение переднего-заднего хода выполняется при последующем движении, модуль 90 определения продолжения автономного вождения определяет то, что продолжение автономной парковки является невозможным. В этом случае, модуль 76 управления автономным вождением останавливает транспортное средство 10 и отменяет автономную парковку.
[0067] Наоборот, когда модуль 94 определения неисправностей при переключении передач определяет возникновение неисправности при переключении передач во время движения в режиме автономного вождения, т.е. когда неисправность, которая представляет собой сбой при переключении переднего-заднего хода, возникает во время движения в режиме автономного вождения, и прогнозируется то, что переключение переднего-заднего хода (переключение диапазона переключения передач) не выполняется при последующем движении (движении в целевое местоположение), модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения в целевое местоположение является возможным. Когда модуль 94 определения неисправностей при переключении передач определяет возникновение неисправности при переключении передач во время автономной парковки, т.е. когда неисправность при переключении передач возникает во время автономной парковки, и прогнозируется то, что переключение переднего-заднего хода не выполняется в последующей парковке, модуль 90 определения продолжения автономного вождения определяет то, что продолжение автономной парковки в целевом местоположении парковки является возможным.
[0068] Даже в случае, если неисправность при переключении передач возникает во время движения в режиме автономного вождения и автономной парковки, транспортное средство по-прежнему может достигать целевого местоположения посредством движения в режиме автономного вождения, и транспортное средство может парковаться в целевом местоположении парковки посредством автономной парковки, если переключение переднего-заднего хода не выполняется после возникновения неисправности при переключении передач. Соответственно, когда неисправность при переключении передач возникает во время движения в режиме автономного вождения и автономной парковки, модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения и автономной парковки является возможным, когда прогнозируется то, что переключение переднего-заднего хода не выполняется при последующем движении. Следовательно, модуль 76 управления автономным вождением непрерывно выполняет движение в режиме автономного вождения и автономную парковку. Следовательно, даже в случае, если возникает неисправность при переключении передач, предотвращается отмена движения в режиме автономного вождения и автономной парковки больше, чем требуется. Соответственно, окружение, в котором выполняются движение в режиме автономного вождения и автономная парковка, увеличивается, и в силу этого удобство движения в режиме автономного вождения и автономной парковки повышается.
[0069] Здесь, то, выполняется или нет переключение переднего-заднего хода при последующем движении, прогнозируется посредством упреждающей выборки намеченного пути движения, заданного с возможностью достигать целевого местоположения и целевого местоположения парковки, и определения того, что выполняется переключение переднего-заднего хода, когда переключение переднего-заднего хода считается необходимым, когда транспортное средство движется вдоль намеченного пути движения. Соответственно, даже в случае, если неисправность при переключении передач обнаруживается во время выполнения движения в режиме автономного вождения, и определяется то, что переключение переднего-заднего хода выполняется при последующем движении, модуль 90 определения продолжения автономного вождения по-прежнему может определять то, что продолжение движения в режиме автономного вождения является возможным, когда модуль 76 управления автономным вождением выполняет поиск и обнаруживает новый намеченный путь движения в целевое местоположение, намеченный путь движения, не предусматривающий переключение переднего-заднего хода. В этом случае, модуль 76 управления автономным вождением выполняет движение в режиме автономного вождения транспортного средства 10 в целевое местоположение согласно обнаруженному новому намеченному пути движения. Когда новый намеченный путь движения, который не предусматривает переключение переднего-заднего хода, не обнаруживается, модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения является невозможным. Модуль 76 управления автономным вождением выполняет движение в режиме автономного вождения транспортного средства 10 в близлежащий островок безопасности. После того как транспортное средство 10 достигает островка безопасности, модуль 76 управления автономным вождением останавливает транспортное средство 10 и отменяет движение в режиме автономного вождения.
[0070] Это также применяется к случаю, в котором неисправность при переключении передач обнаруживается во время выполнения автономной парковки. Даже когда определяется то, что переключение переднего-заднего хода выполняется в последующей автономной парковке, модуль 76 управления автономным вождением может выполнять поиск нового намеченного пути движения, который не предусматривает переключение переднего-заднего хода. После того как новый намеченный путь движения обнаруживается, модуль 90 определения продолжения автономного вождения может определять то, что продолжение автономной парковки является возможным. В этом случае, модуль 76 управления автономным вождением выполняет автономную парковку транспортного средства 10 в целевом местоположении парковки согласно обнаруженному новому намеченному пути движения. Когда новый намеченный путь движения, который не предусматривает переключение переднего-заднего хода, не обнаруживается, модуль 90 определения продолжения автономного вождения определяет то, что продолжение автономной парковки является невозможным. Следовательно, модуль 76 управления автономным вождением останавливает транспортное средство 10 и отменяет управление автоматической парковкой. Например, во время парковки транспортного средства 10 в целевом местоположении парковки, может иметь место то, что транспортное средство 10 может парковаться без привлечения переключения переднего-заднего хода, если допустимо то, что направление транспортного средства 10 должно изменяться на противоположное после парковки. В таком случае, автономная парковка непрерывно выполняется посредством сброса нового намеченного пути движения.
[0071] Предусмотрен случай, в котором движение в режиме автономного вождения и автономная парковка по-прежнему непрерывно выполняются после того, как неисправность при блокировке при парковке или неисправность при переключении передач возникает во время движения в режиме автономного вождения и автономной парковки. В этом случае, после того как транспортное средство 10 останавливается в целевом местоположении и целевом местоположении парковки, модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения и автономной парковки является невозможным. В этом случае, модуль 76 управления автономным вождением отменяет движение в режиме автономного вождения и автономную парковку, и модуль 98 выдачи уведомлений относительно неисправностей отображает возникновение неисправности на приборной панели 77, включенной около водительского сиденья, чтобы уведомлять водителя в отношении того, что возникает неисправность. Модуль 98 выдачи уведомлений относительно неисправностей также отображает на приборной панели 77 действие, которое следует предпринимать после возникновения неисправности.
[0072] Когда модуль 96 определения неисправностей резервной системы определяет возникновение неисправности резервной системы, поскольку неисправность возникает в одной из линии 70 CAN-связи и локальной линии 72 во время движения в режиме автономного вождения, модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения в целевое местоположение является возможным. Когда модуль 96 определения неисправностей резервной системы определяет возникновение неисправности резервной системы, поскольку неисправность возникает в одной из линии 70 CAN-связи и локальной линии 72 во время автономной парковки, модуль 90 определения продолжения автономного вождения определяет то, что продолжение автономной парковки в целевом местоположении парковки является возможным. Даже в случае, если неисправность возникает в одной линии связи из линии 70 CAN-связи и локальной линии 72, система 74 управления переключением передач может работать нормально с другой линией связи, которая является нормальной, и в силу этого транспортное средство может двигаться в целевое местоположение и целевое местоположение парковки. Соответственно, когда неисправность резервной системы возникает вследствие неисправности в одной линии связи из линии 70 CAN-связи и локальной линии 72 во время движения в режиме автономного вождения и автономной парковки, модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения и автономной парковки является возможным. В этом случае, модуль 76 управления автономным вождением непрерывно выполняет движение в режиме автономного вождения и автономную парковку посредством использования нормальной линии связи. Таким образом, даже в случае, если возникает неисправность резервной системы, движение в режиме автономного вождения и автономная парковка непрерывно выполняются, когда переключение диапазона переключения передач посредством использования нормальной линии связи является возможным. Это предотвращает отмену движения в режиме автономного вождения и автономной парковки больше, чем требуется. Соответственно, окружение, в котором выполняются движение в режиме автономного вождения и автономная парковка, увеличивается, и в силу этого удобство движения в режиме автономного вождения и автономной парковки повышается.
[0073] Наоборот, когда модуль 96 определения неисправностей резервной системы определяет возникновение неисправности резервной системы, поскольку неисправность возникает как в линии 70 CAN-связи, так и в локальной линии 72 во время движения в режиме автономного вождения, модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения в целевое местоположение и автономной парковки в целевом местоположении парковки является невозможным. В этом случае, модуль 76 управления автономным вождением перемещает транспортное средство 10 в островок безопасности и отменяет движение в режиме автономного вождения и автономную парковку.
[0074] Таким образом, когда неисправность в системе 74 управления переключением передач, которая возникает во время движения в режиме автономного вождения, не оказывает влияние на движение транспортного средства 10, модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения является возможным. Когда неисправность оказывает влияние на движение транспортного средства 10, модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения является невозможным.
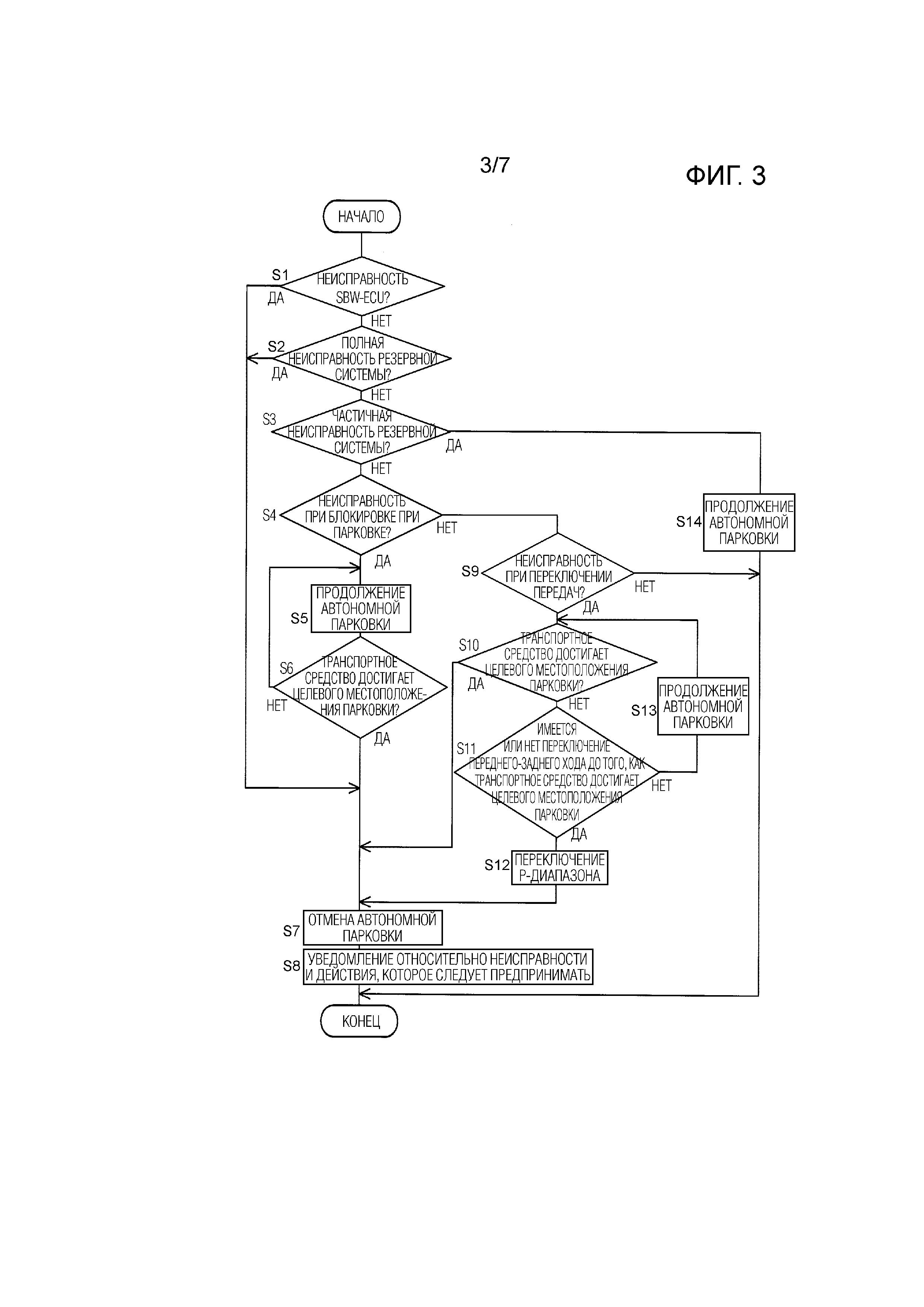
[0075] Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей операцию управления, из числа операций управления электронного устройства 52 управления, которая может повышать удобство посредством увеличения окружения выполнения автономного вождения, даже в случае, если неисправность возникает в системе 74 управления переключением передач, которая переключает диапазон переключения передач во время автоматической парковки, в частности. Блок-схема последовательности операций способа многократно выполняется во время автономной парковки.
[0076] Во-первых, на этапе S1 (в дальнейшем в этом документе, "этап" опускается), соответствующем функции управления модуля 91 определения неисправностей ECU, модуль 91 определения неисправностей ECU определяет то, возникает или нет неисправность ECU, которая представляет собой сбой при нормальном режиме работы ECU 56 переключения передач по проводам. Когда возникает неисправность ECU, "Да" определяется на этапе S1. Соответственно, на этапе S7, соответствующем функции управления модуля 76 управления автономным вождением и модуля 90 определения продолжения автономного вождения, модуль 90 определения продолжения автономного вождения определяет то, что продолжение автономной парковки является невозможным, и модуль 76 управления автономным вождением отменяет автономную парковку. Когда "Нет" определяется на этапе S1, после этого на этапе S2, соответствующем функции управления модуля 96 определения неисправностей резервной системы, модуль 96 определения неисправностей резервной системы определяет то, возникает или нет неисправность резервной системы (полная неисправность резервной системы) вследствие неисправности в двух линиях связи, включающих в себя линию 70 CAN-связи и локальную линию 72. Когда неисправность возникает как в линии 70 CAN-связи, так и в локальной линии 72, "Да" определяется на этапе S2. На этапе S7, модуль 90 определения продолжения автономного вождения определяет то, что продолжение автономной парковки является невозможным, и модуль 76 управления автономным вождением отменяет автономную парковку. Когда "Нет" определяется на этапе S2, после этого на этапе S3, соответствующем функции управления модуля 96 определения неисправностей резервной системы, модуль 96 определения неисправностей резервной системы определяет то, возникает или нет неисправность резервной системы (частичная неисправность резервной системы) вследствие неисправности в одной линии связи из линии 70 CAN-связи и локальной линии 72. Когда неисправность возникает в одной линии связи из линии 70 CAN-связи и локальной линии 72, "Да" определяется на этапе S3. На этапе S14, соответствующем функции управления модуля 90 определения продолжения автономного вождения и модуля 76 управления автономным вождением, модуль 90 определения продолжения автономного вождения определяет то, что продолжение автономной парковки посредством использования другой нормальной линии связи является возможным, и модуль 76 управления автономным вождением непрерывно выполняет автономную парковку.
[0077] Когда неисправность резервной системы не обнаруживается, "Нет" определяется на этапе S3. На этапе S4, соответствующем функции управления модуля 92 определения неисправностей при блокировке, модуль 92 определения неисправностей при блокировке определяет то, возникает или нет неисправность при блокировке при парковке. Когда неисправность при блокировке при парковке обнаруживается, "Да" определяется на этапе S4. На этапе S5, соответствующем функции управления модуля 90 определения продолжения автономного вождения и модуля 76 управления автономным вождением, модуль 90 определения продолжения автономного вождения определяет то, что продолжение автономной парковки является возможным, и модуль 76 управления автономным вождением непрерывно выполняет автономную парковку. На этапе S6, соответствующем функции управления модуля 76 управления автономным вождением, модуль 76 управления автономным вождением определяет то, достигает или нет транспортное средство 10 указанного целевого местоположения парковки. Когда транспортное средство 10 не достигает целевого местоположения парковки, "Нет" определяется на этапе S6. Затем процесс возвращается на этапе S5, на котором непрерывно выполняется автономная парковка. Когда транспортное средство 10 достигает целевого местоположения парковки, "Да" определяется на этапе S6. После этого на этапе S7, соответствующем функции управления модуля 90 определения продолжения автономного вождения и модуля 76 управления автономным вождением, модуль 76 управления автономным вождением отменяет автономную парковку. Затем, на этапе S8, соответствующем функции управления модуля 98 выдачи уведомлений относительно неисправностей, модуль 98 выдачи уведомлений относительно неисправностей отображает (уведомляет) на приборной панели 77 возникновение неисправности и действие, которое следует предпринимать после возникновения неисправности.
[0078] Снова на этапе S4, когда неисправность при блокировке при парковке не обнаруживается, "Нет" определяется на этапе S4. На этапе S9, соответствующем функции управления модуля 94 определения неисправностей при переключении передач, модуль 94 определения неисправностей при переключении передач определяет то, возникает или нет неисправность при переключении передач. Когда неисправность при переключении передач не обнаруживается, "Нет" определяется на этапе S9, и настоящая процедура завершается. Когда неисправность при переключении передач обнаруживается, "Да" определяется на этапе S9. На этапе S10, соответствующем функции управления модуля 76 управления автономным вождением, модуль 76 управления автономным вождением определяет то, достигает или нет транспортное средство указанного целевого местоположения парковки. Когда транспортное средство достигает целевого местоположения парковки, "Да" определяется на этапе S10. На этапе S7, модуль 76 управления автономным вождением отменяет автономную парковку. На этапе S8, модуль 98 выдачи уведомлений относительно неисправностей уведомляет относительно возникновения неисправности водителю.
[0079] Когда транспортное средство не достигает целевого местоположения парковки, "Нет" определяется на этапе S10. На этапе S11, соответствующем функции управления модуля 90 определения продолжения автономного вождения, модуль 90 определения продолжения автономного вождения определяет то, прогнозируется или нет то, что переключение переднего-заднего хода выполняется до того, как транспортное средство достигает целевого местоположения парковки. Когда прогнозируется то, что переключение переднего-заднего хода не выполняется до того, как транспортное средство достигает целевого местоположения парковки, "Нет" определяется на этапе S11. На этапе S13, соответствующем функции управления модуля 90 определения продолжения автономного вождения и модуля 76 управления автономным вождением, модуль 90 определения продолжения автономного вождения определяет то, что продолжение автономной парковки является возможным, и модуль 76 управления автономным вождением непрерывно выполняет автономную парковку. Когда автономная парковка продолжается на этапе S13, процесс возвращается на этапе S10. Наоборот, когда прогнозируется то, что переключение переднего-заднего хода выполняется до того, как транспортное средство достигает целевого местоположения парковки, "Да" определяется на этапе S11. На этапе S12, соответствующем функции управления модуля 90 определения продолжения автономного вождения и модуля 76 управления автономным вождением, модуль 76 управления автономным вождением переключает диапазон переключения передач блока 14 трансмиссии на диапазон парковки и останавливает транспортное средство 10. Затем, на этапе S7, модуль 76 управления автономным вождением отменяет автономную парковку. На этапе S8, модуль 98 выдачи уведомлений относительно неисправностей уведомляет относительно возникновения неисправности водителю.
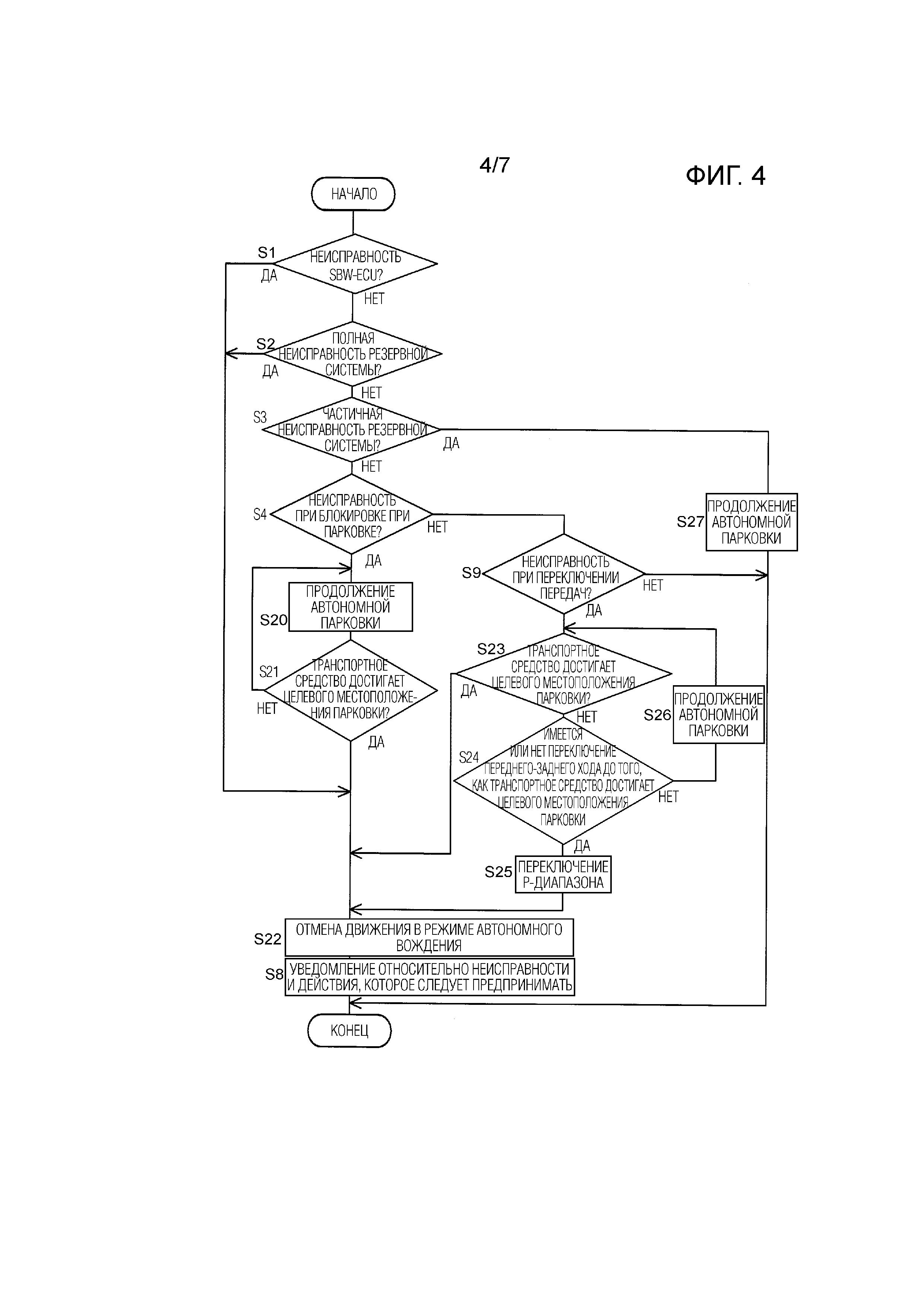
[0080] Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей операцию управления, из числа операций управления электронного устройства 52 управления, которая может повышать удобство посредством увеличения окружения выполнения движения в режиме автономного вождения, даже в случае, если неисправность возникает в системе, которая переключает диапазон переключения передач во время движения в режиме автономного вождения, в частности. Блок-схема последовательности операций способа многократно выполняется во время движения в режиме автономного вождения.
[0081] На фиг. 4, на этапе S1 (в дальнейшем в этом документе, "этап" опускается), соответствующем функции управления модуля 91 определения неисправностей ECU, модуль 91 определения неисправностей ECU определяет то, возникает или нет неисправность ECU, которая представляет собой сбой при нормальном режиме работы ECU 56 переключения передач по проводам. Когда возникает неисправность ECU, "Да" определяется на этапе S1. Соответственно, на этапе S22, соответствующем функции управления модуля 76 управления автономным вождением и модуля 90 определения продолжения автономного вождения, модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения является невозможным, и модуль 76 управления автономным вождением отменяет движение в режиме автономного вождения. Когда "Нет" определяется на этапе S1, после этого на этапе S2, соответствующем функции управления модуля 96 определения неисправностей резервной системы, модуль 96 определения неисправностей резервной системы определяет то, возникает или нет неисправность резервной системы вследствие неисправности в двух линиях связи, включающих в себя линию 70 CAN-связи и локальную линию 72. Когда неисправность возникает как в линии 70 CAN-связи, так и в локальной линии 72, "Да" определяется на этапе S2. На этапе S22 модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения является невозможным, и модуль 76 управления автономным вождением отменяет движение в режиме автономного вождения. Когда "Нет" определяется на этапе S2, после этого на этапе S3, соответствующем функции управления модуля 96 определения неисправностей резервной системы, модуль 96 определения неисправностей резервной системы определяет то, возникает или нет неисправность резервной системы вследствие неисправности в одной линии связи из линии 70 CAN-связи и локальной линии 72. Когда неисправность резервной системы возникает вследствие неисправности в одной линии связи, "Да" определяется на этапе S3. На этапе S27, соответствующем функции управления модуля 90 определения продолжения автономного вождения и модуля 76 управления автономным вождением, модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения посредством использования другой нормальной линии связи является возможным, и модуль 76 управления автономным вождением непрерывно выполняет движение в режиме автономного вождения.
[0082] Когда неисправность резервной системы не обнаруживается, "Нет" определяется на этапе S3. На этапе S4, соответствующем функции управления модуля 92 определения неисправностей при блокировке, модуль 92 определения неисправностей при блокировке определяет то, возникает или нет неисправность при блокировке при парковке. Когда неисправность при блокировке при парковке обнаруживается, "Да" определяется на этапе S4. На этапе S20, соответствующем функции управления модуля 90 определения продолжения автономного вождения и модуля 76 управления автономным вождением, модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения является возможным, и модуль 76 управления автономным вождением непрерывно выполняет движение в режиме автономного вождения. На этапе S21, соответствующем функции управления модуля 76 управления автономным вождением, модуль 76 управления автономным вождением определяет то, достигает или нет транспортное средство 10 целевого местоположения. Когда транспортное средство 10 не достигает целевого местоположения, "Нет" определяется на этапе S21. Затем процесс возвращается на этапе S20, на котором непрерывно выполняется движение в режиме автономного вождения. Когда транспортное средство 10 достигает целевого местоположения, "Да" определяется на этапе S21. На этапе S22, соответствующем функции управления модуля 90 определения продолжения автономного вождения и модуля 76 управления автономным вождением, модуль 76 управления автономным вождением отменяет движение в режиме автономного вождения. Затем, на этапе S8, соответствующем функции управления модуля 98 выдачи уведомлений относительно неисправностей, модуль 98 выдачи уведомлений относительно неисправностей отображает (уведомляет) на приборной панели 77 возникновение неисправности и действие, которое следует предпринимать после возникновения неисправности.
[0083] Снова на этапе S4, когда неисправность при блокировке при парковке не обнаруживается, "Нет" определяется на этапе S4. На этапе S9, соответствующем функции управления модуля 94 определения неисправностей при переключении передач, модуль 94 определения неисправностей при переключении передач определяет то, возникает или нет неисправность при переключении передач. Когда неисправность при переключении передач не обнаруживается, "Нет" определяется на этапе S9, и настоящая процедура завершается. Когда неисправность при переключении передач обнаруживается, "Да" определяется на этапе S9. На этапе S23, соответствующем функции управления модуля 76 управления автономным вождением, модуль 76 управления автономным вождением определяет то, достигает или нет транспортное средство целевого местоположения. Когда транспортное средство достигает целевого местоположения, "Да" определяется на этапе S23. На этапе S22, модуль 76 управления автономным вождением отменяет движение в режиме автономного вождения. На этапе S8, модуль 98 выдачи уведомлений относительно неисправностей уведомляет относительно возникновения неисправности водителю.
[0084] Когда транспортное средство не достигает целевого местоположения, "Нет" определяется на этапе S23. На этапе S24, соответствующем функции управления модуля 90 определения продолжения автономного вождения, модуль 90 определения продолжения автономного вождения определяет то, прогнозируется или нет то, что переключение переднего-заднего хода выполняется до того, как транспортное средство достигает целевого местоположения. Когда прогнозируется то, что переключение переднего-заднего хода не выполняется до того, как транспортное средство достигает целевого местоположения, "Нет" определяется на этапе S24. На этапе S26, соответствующем функции управления модуля 90 определения продолжения автономного вождения и модуля 76 управления автономным вождением, модуль 90 определения продолжения автономного вождения определяет то, что продолжение движения в режиме автономного вождения является возможным, и модуль 76 управления автономным вождением непрерывно выполняет движение в режиме автономного вождения. Наоборот, когда прогнозируется то, что переключение переднего-заднего хода выполняется до того, как транспортное средство достигает целевого местоположения, "Да" определяется на этапе S24. На этапе S25, соответствующем функции управления модуля 90 определения продолжения автономного вождения и модуля 76 управления автономным вождением, модуль 76 управления автономным вождением переключает диапазон переключения передач блока 14 трансмиссии на диапазон парковки после перемещения транспортного средства 10 в предписанный островок безопасности и затем останавливает транспортное средство 10. Затем, на этапе S22, модуль 76 управления автономным вождением отменяет движение в режиме автономного вождения. На этапе S8, модуль 98 выдачи уведомлений относительно неисправностей уведомляет относительно возникновения неисправности водителю.
[0085] Как описано выше, в настоящем варианте осуществления, транспортное средство 10 может задаваться с возможностью двигаться в целевое местоположение (включающее в себя целевое местоположение парковки) посредством движения в режиме автономного вождения (включающего в себя автономную парковку), в зависимости от типа неисправности, которая возникает в системе 74 управления переключением передач. Соответственно, правильность движения посредством движения в режиме автономного вождения, определяется согласно типу неисправности в системе 74 управления переключением передач. Это позволяет ограничивать отмену движения в режиме автономного вождения больше, чем требуется. Следовательно, окружение, в котором выполняется движение в режиме автономного вождения, увеличивается, и удобство движения в режиме автономного вождения повышается. Даже в случае, если неисправность возникает в системе 74 управления переключением передач, определяется то, что продолжение движения в режиме автономного вождения является возможным, когда неисправность представляет собой неисправность, которая не препятствует достижению, посредством транспортного средства, целевого местоположения. Следовательно, окружение, в котором выполняется движение в режиме автономного вождения, увеличивается, и удобство движения в режиме автономного вождения повышается.
[0086] Согласно настоящему варианту осуществления, даже когда переключение на диапазон парковки сбоит во время движения в режиме автономного вождения (включающего в себя автономную парковку), транспортное средство может двигаться в целевое местоположение (включающее в себя целевое местоположение парковки) посредством движения в режиме автономного вождения. Следовательно, даже когда неисправность (неисправность при блокировке при парковке), которая представляет собой сбой при переключении на диапазон парковки, возникает во время движения в режиме автономного вождения, определяется то, что движение в режиме автономного вождения в целевое местоположение является возможным. Соответственно, поскольку движение в режиме автономного вождения продолжается, удобство движения в режиме автономного вождения повышается. Даже в случае, если неисправность (неисправность при переключении передач), которая представляет собой сбой при переключении переднего-заднего хода, возникает во время движения в режиме автономного вождения, движение в режиме автономного вождения в целевое местоположение является возможным, когда прогнозируется то, что переключение переднего-заднего хода не выполняется при последующем движении. Следовательно, даже в случае, если неисправность, которая представляет собой сбой при переключении переднего-заднего хода, возникает во время движения в режиме автономного вождения, определяется то, что движение в режиме автономного вождения в целевое местоположение является возможным, когда прогнозируется то, что переключение переднего-заднего хода не выполняется при последующем движении. Соответственно, поскольку движение в режиме автономного вождения продолжается, удобство движения в режиме автономного вождения повышается. Кроме того, транспортное средство выполнено с возможностью обеспечивать переключение диапазона переключения передач через две линии связи, включающие в себя линию 70 CAN-связи и локальную линию 72. Соответственно, даже в случае, если неисправность возникает в одной из линий связи во время движения в режиме автономного вождения, движение в режиме автономного вождения в целевое местоположение является возможным посредством использования другой связи, которая работает нормально. Следовательно, даже когда неисправность (неисправность резервной системы) возникает в одной из линий связи во время движения в режиме автономного вождения, определяется то, что движение в режиме автономного вождения в целевое местоположение является возможным. Поскольку движение в режиме автономного вождения продолжается, удобство движения в режиме автономного вождения повышается.
[0087] Далее приводится описание другого варианта осуществления настоящего изобретения. В нижеприведенном описании, составляющие элементы, идентичные составляющим элементам в вышеуказанном варианте осуществления, обозначены посредством идентичных ссылок с номерами, так что их описание опускается.
[0088] Фиг. 5 является функциональной блок-схемой, иллюстрирующей функцию управления электронного устройства 100 управления (устройства управления) в качестве другого варианта осуществления настоящего изобретения. Фиг. 5 соответствует фиг. 2, показывающему вариант осуществления, описанный выше. Электронное устройство 100 управления настоящего варианта осуществления сконфигурировано посредством включения HV-ECU 54, ECU 56 переключения передач по проводам, ECU 58 рулевого управления, ECU 60 тормоза и ECU 102 автономного вождения. Поскольку функции управления, включенные в HV-ECU 54, ECU 56 переключения передач по проводам, ECU 58 рулевого управления и ECU 60 тормоза, являются практически аналогичными функциям управления в раскрытом варианте осуществления, их описание опускается.
[0089] ECU 102 автономного вождения функционально включает в себя модуль 76 управления автономным вождением, модуль 91 определения неисправностей ECU, модуль 98 выдачи уведомлений относительно неисправностей и модуль 104 определения переключения на автономное вождение. Поскольку функции управления модуля 76 управления автономным вождением, модуля 91 определения неисправностей ECU и модуля 98 выдачи уведомлений относительно неисправностей являются практически аналогичными функциям управления в раскрытом варианте осуществления, их описание опускается. Модуль 104 определения переключения на автономное вождение соответствует модулю управления настоящего изобретения.
[0090] Когда неисправность возникает в системе 74 управления переключением передач, которая переключает диапазон переключения передач блока 14 трансмиссии во время движения в режиме вождения вручную, и затем водитель выполняет операцию для переключения на движение в режиме автономного вождения и автономную парковку, модуль 104 определения переключения на автономное вождение определяет то, является или нет переключение на движение в режиме автономного вождения и автономную парковку возможным, согласно типу неисправности, которая возникает во время движения в режиме вождения вручную. Когда неисправность, которая возникает во время движения в режиме вождения вручную, представляет собой неисправность, которая затрудняет достижение, посредством транспортного средства, целевого местоположения (включающего в себя целевое местоположение парковки) в случае, если движение в режиме вождения вручную переключается на движение в режиме автономного вождения (включающее в себя автономную парковку), модуль 104 определения переключения на автономное вождение определяет то, что переключение на движение в режиме автономного вождения является невозможным. Когда неисправность, которая возникает во время движения в режиме вождения вручную, представляет собой неисправность, которая не препятствует достижению, посредством транспортного средства, целевого местоположения (включающего в себя целевое местоположение парковки) в случае, если движение в режиме вождения вручную переключается на движение в режиме автономного вождения (включающее в себя автономную парковку), модуль 104 определения переключения на автономное вождение определяет то, что переключение на движение в режиме автономного вождения является возможным. Модуль 104 определения переключения на автономное вождение определяет то, является или нет переключение на движение в режиме автономного вождения и автономную парковку из движения в режиме вождения вручную возможным, на основе того, представляет собой неисправность, определенная посредством каждого из модуля 91 определения неисправностей ECU, модуля 92 определения неисправностей при блокировке, модуля 94 определения неисправностей при переключении передач и модуля 96 определения неисправностей резервной системы, или нет неисправность, которая не препятствует достижению, посредством транспортного средства, целевого местоположения и целевого местоположения парковки. Модуль 76 управления автономным вождением выполняет управление движением транспортного средства 10 согласно возможности переключения на движение в режиме автономного вождения и автономную парковку, которая определяется посредством модуля 104 определения переключения на автономное вождение. Например, когда определяется то, что переключение на движение в режиме автономного вождения и автономную парковку является возможным, модуль 76 управления автономным вождением переключает движение в режиме вождения вручную на движение в режиме автономного вождения и автономную парковку и выполняет управление движением транспортного средства 10.
[0091] Когда модуль 91 определения неисправностей ECU определяет возникновение неисправности ECU во время движения в режиме вождения вручную, и затем водитель выполняет операцию переключения для переключения на движение в режиме автономного вождения, модуль 104 определения переключения на автономное вождение определяет то, что переключение на движение в режиме автономного вождения является невозможным, и запрещает переключение на движение в режиме автономного вождения. Когда модуль 91 определения неисправностей ECU определяет возникновение неисправности ECU во время движения в режиме вождения вручную, и затем водитель выполняет операцию переключения для переключения на автономную парковку, модуль 104 определения переключения на автономное вождение определяет то, что переключение на автономную парковку является невозможным, и запрещает переключение на автономную парковку.
[0092] Когда модуль 92 определения неисправностей при блокировке обнаруживает неисправность при блокировке при парковке, т.е. возникает неисправность, которая представляет собой сбой при переключении на диапазон парковки, во время движения в режиме вождения вручную, и затем водитель выполняет операцию переключения для переключения на движение в режиме автономного вождения, модуль 104 определения переключения на автономное вождение определяет то, что переключение на движение в режиме автономного вождения является возможным, и разрешает переключение на движение в режиме автономного вождения. Когда модуль 92 определения неисправностей при блокировке обнаруживает неисправность при блокировке при парковке во время движения в режиме вождения вручную, и затем водитель выполняет операцию переключения для переключения на автономную парковку, модуль 104 определения переключения на автономное вождение определяет то, что переключение на автономную парковку является возможным, и разрешает переключение на автономную парковку. В случае если выполняются движение в режиме автономного вождения и автономная парковка, в то время как возникает неисправность при блокировке при парковке, транспортное средство 10 не может выполнять переключение на диапазон парковки, когда транспортное средство 10 останавливается. Транспортное средство 10 по-прежнему имеет возможность достигать целевого местоположения посредством движения в режиме автономного вождения и парковаться в целевом местоположении парковки посредством автономной парковки. Соответственно, когда неисправность при блокировке при парковке возникает во время движения в режиме вождения вручную, и затем водитель выполняет операцию переключения для переключения на движение в режиме автономного вождения и автономную парковку, модуль 104 определения переключения на автономное вождение определяет то, что переключение на движение в режиме автономного вождения и автономную парковку является возможным. Следовательно, даже когда возникает неисправность при блокировке при парковке, переключение на движение в режиме автономного вождения и автономную парковку является возможным. Это позволяет предотвращать запрет на переключение на движение в режиме автономного вождения и автономную парковку больше, чем требуется. Это увеличивает окружение, в котором выполняются движение в режиме автономного вождения и автономная парковка, и в силу этого удобство движения в режиме автономного вождения и автономной парковки повышается.
[0093] В случае если модуль 94 определения неисправностей при переключении передач обнаруживает неисправность при переключении передач во время движения в режиме вождения вручную, т.е. неисправность, которая представляет собой сбой при переключении переднего-заднего хода, возникает во время движения в режиме вождения вручную, и затем водитель выполняет операцию переключения для переключения на движение в режиме автономного вождения, модуль 104 определения переключения на автономное вождение определяет то, что переключение с движения в режиме вождения вручную на движение в режиме автономного вождения является возможным, и разрешает переключение на движение в режиме автономного вождения, когда прогнозируется то, что переключение переднего-заднего хода не выполняется до того, как транспортное средство 10 достигает целевого местоположения при последующем движении. Когда неисправность при переключении передач обнаруживается во время движения в режиме вождения вручную, т.е. возникает неисправность при переключении передач, и затем водитель выполняет операцию переключения для переключения на автономную парковку, модуль 104 определения переключения на автономное вождение определяет то, что переключение с движения в режиме вождения вручную на автономную парковку является возможным, и разрешает переключение на автономную парковку, когда прогнозируется то, что переключение переднего-заднего хода не выполняется до того, как транспортное средство 10 достигает целевого местоположения парковки при последующем движении.
[0094] Даже в случае, если неисправность при переключении передач возникает во время движения в режиме вождения вручную, транспортное средство по-прежнему имеет возможность достигать целевого местоположения посредством движения в режиме автономного вождения и парковаться в целевом местоположении парковки посредством автономной парковки, когда прогнозируется то, что переключение переднего-заднего хода не выполняется до того, как транспортное средство достигает целевого местоположения и целевого местоположения парковки при последующем движении. Следовательно, когда операция переключения для переключения на движение в режиме автономного вождения и автономную парковку выполняется, определяется то, что переключение на движение в режиме автономного вождения и автономную парковку является возможным. Поскольку переключение на движение в режиме автономного вождения и автономную парковку выполняется, удобство движения в режиме автономного вождения и автономной парковки повышается. Здесь, то, выполняется или нет переключение переднего-заднего хода до того, как транспортное средство достигает целевого местоположения и целевого местоположения парковки, прогнозируется посредством упреждающей выборки намеченного пути движения, заданного с возможностью достигать целевого местоположения и целевого местоположения парковки, и определения того, что переключение переднего-заднего хода считается необходимым, когда транспортное средство движется вдоль намеченного пути движения.
[0095] В случае если модуль 94 определения неисправностей при переключении передач обнаруживает неисправность при переключении передач во время движения в режиме вождения вручную, и затем операция переключения для переключения на движение в режиме автономного вождения (включающее в себя автономную парковку) выполняется, модуль 104 определения переключения на автономное вождение определяет то, что переключение на движение в режиме автономного вождения является невозможным, и запрещает переключение на движение в режиме автономного вождения, когда прогнозируется то, что переключение переднего-заднего хода выполняется до того, как транспортное средство 10 достигает целевого местоположения (включающего в себя целевое местоположение парковки) при последующем движении. Когда новый намеченный путь движения, который не требует переключения переднего-заднего хода, находится и обнаруживается, аналогично вышеуказанному варианту осуществления, движение в режиме автономного вождения в целевое местоположение может выполняться согласно новому намеченному пути движения. Таким образом, даже в случае, если возникает неисправность при переключении передач, переключение на движение в режиме автономного вождения может разрешаться.
[0096] В случае если модуль 96 определения неисправностей резервной системы определяет то, что неисправность резервной системы возникает в одной из линии 70 CAN-связи и локальной линии 72 во время движения в режиме вождения вручную, и затем водитель выполняет операцию переключения для переключения на движение в режиме автономного вождения и автономную парковку, модуль 104 определения переключения на автономное вождение определяет то, что переключение с движения в режиме вождения вручную на движение в режиме автономного вождения и автономную парковку является возможным, и разрешает переключение на движение в режиме автономного вождения и автономную парковку. Это обусловлено тем, что как описано выше, когда неисправность возникает в одной из линий связи, система 74 управления переключением передач может работать нормально, и транспортное средство 10 может задаваться с возможностью двигаться в целевое местоположение и целевое местоположение парковки посредством использования другой линии связи, которая является нормальной.
[0097] Когда модуль 96 определения неисправностей резервной системы определяет то, что неисправность резервной системы возникает в двух линиях связи, включающих в себя линию 70 CAN-связи и локальную линию 72 во время движения в режиме вождения вручную, и затем водитель выполняет операцию переключения для переключения на движение в режиме автономного вождения и автономную парковку, модуль 104 определения переключения на автономное вождение определяет то, что переключение с движения в режиме вождения вручную на движение в режиме автономного вождения и автономную парковку является невозможным, и запрещает переключение на движение в режиме автономного вождения и автономную парковку.
[0098] Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей операцию управления, из числа операций управления электронного устройства 52 управления, в случае если неисправность возникает в системе, связанной с переключением диапазона переключения передач во время движения в режиме вождения вручную и во время парковки транспортного средства 10 (переходной стадии при парковке), в частности. Блок-схема последовательности операций способа многократно выполняется во время движения в режиме вождения вручную.
[0099] На этапе S30, соответствующем функции управления модуля 104 определения переключения на автономное вождение, модуль 104 определения переключения на автономное вождение определяет то, выполняет или нет водитель операцию переключения для переключения на автономную парковку во время движения в режиме вождения вручную. Когда операция переключения для переключения на автономную парковку не выполняется, "Нет" определяется на этапе S30, и настоящая процедура завершается. Когда операция переключения для переключения на автономную парковку выполняется, "Да" определяется на этапе S30. На этапе S31, соответствующем функции управления модуля 91 определения неисправностей ECU, модуль 91 определения неисправностей ECU определяет то, возникает или нет неисправность ECU, которая представляет собой сбой при нормальном режиме работы ECU 56 переключения передач по проводам, во время движения в режиме вождения вручную. Когда возникает неисправность ECU, "Да" определяется на этапе S31. После этого на этапе S37, соответствующем функции управления модуля 104 определения переключения на автономное вождение, модуль 104 определения переключения на автономное вождение определяет то, что переключение на автономную парковку является невозможным, и запрещает переключение на автономную парковку.
[0100] Когда "Нет" определяется на этапе S31, на этапе S32, соответствующем функции управления модуля 96 определения неисправностей резервной системы, модуль 96 определения неисправностей резервной системы определяет то, возникает или нет неисправность резервной системы (полная неисправность резервной системы) вследствие неисправности в двух линиях связи, включающих в себя линию 70 CAN-связи и локальную линию 72. Когда неисправность возникает как в линии 70 CAN-связи, так и в локальной линии 72, "Да" определяется на этапе S32. На этапе S37, модуль 104 определения переключения на автономное вождение определяет то, что переключение на автономную парковку является невозможным, и запрещает переключение на автономную парковку.
[0101] Когда "Нет" определяется на этапе S32, после этого на этапе S33, соответствующем функции управления модуля 96 определения неисправностей резервной системы, модуль 96 определения неисправностей резервной системы определяет то, возникает или нет неисправность резервной системы вследствие неисправности в одной линии связи из линии 70 CAN-связи и локальной линии 72. Когда неисправность (частичная неисправность резервной системы) возникает в одной линии связи из линии 70 CAN-связи и локальной линии 72, "Да" определяется на этапе S33. На этапе S38, соответствующем функции управления модуля 104 определения переключения на автономное вождение и модуля 76 управления автономным вождением, модуль 104 определения переключения на автономное вождение определяет то, что переключение на автономную парковку является возможным, и модуль 76 управления автономным вождением выполняет переключение на автономную парковку.
[0102] Когда "Нет" определяется на этапе S33, после этого на этапе S34, соответствующем функции управления модуля 92 определения неисправностей при блокировке, модуль 92 определения неисправностей при блокировке определяет то, возникает или нет неисправность при блокировке при парковке. Когда неисправность при блокировке при парковке обнаруживается, "Да" определяется на этапе S34. На этапе S38, модуль 104 определения переключения на автономное вождение определяет то, что переключение на автономную парковку является возможным, и модуль 76 управления автономным вождением выполняет переключение на автономную парковку. Когда неисправность при блокировке при парковке не обнаруживается, "Нет" определяется на этапе S34. На этапе S35, соответствующем функции управления модуля 94 определения неисправностей при переключении передач, модуль 94 определения неисправностей при переключении передач определяет то, возникает или нет неисправность при переключении передач. Когда неисправность при переключении передач не обнаруживается, "Нет" определяется на этапе S35. На этапе S38, модуль 104 определения переключения на автономное вождение определяет то, что переключение на автономную парковку является возможным, и модуль 76 управления автономным вождением выполняет переключение на автономную парковку. Когда неисправность при переключении передач обнаруживается, "Да" определяется на этапе S35. На этапе S36, соответствующем функции управления модуля 104 определения переключения на автономное вождение, модуль 104 определения переключения на автономное вождение определяет то, прогнозируется или нет то, что переключение переднего-заднего хода выполняется до того, как транспортное средство достигает целевого местоположения парковки. Когда модуль 104 определения переключения на автономное вождение определяет то, что переключение переднего-заднего хода не выполняется до того, как транспортное средство достигает целевого местоположения парковки, "Нет" определяется на этапе S36. После этого на этапе S38, модуль 104 определения переключения на автономное вождение определяет то, что переключение на автономную парковку является возможным, и модуль 76 управления автономным вождением выполняет переключение на автономную парковку. Когда модуль 104 определения переключения на автономное вождение определяет то, что переключение переднего-заднего хода выполняется до того, как транспортное средство достигает целевого местоположения парковки, "Да" определяется на этапе S36. После этого на этапе S37, модуль 104 определения переключения на автономное вождение определяет то, что переключение на автономную парковку является невозможным, и запрещает переключение на автономную парковку.
[0103] Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей операцию управления, из числа операций управления электронного устройства 52 управления, в случае если неисправность возникает в системе, связанной с переключением диапазона переключения передач во время движения в режиме вождения вручную и во время выполнения движения в режиме автономного вождения, в частности. Блок-схема последовательности операций способа многократно выполняется во время движения в режиме вождения вручную.
[0104] На этапе S40, соответствующем функции управления модуля 104 определения переключения на автономное вождение, модуль 104 определения переключения на автономное вождение определяет то, выполняется или нет операция переключения для переключения на движение в режиме автономного вождения во время движения в режиме вождения вручную. Когда операция переключения для переключения на движение в режиме автономного вождения не выполняется, "Нет" определяется на этапе S40, и настоящая процедура завершается. Когда операция переключения для переключения на движение в режиме автономного вождения выполняется, "Да" определяется на этапе S40. После этого на этапе S31, соответствующем функции управления модулем 91 определения неисправностей ECU, модуль 91 определения неисправностей ECU определяет то, возникает или нет неисправность ECU, которая представляет собой сбой в нормальном режиме работы ECU 56 переключения передач по проводам, во время движения в режиме вождения вручную. Когда возникает неисправность ECU, "Да" определяется на этапе S31. После этого на этапе S42, соответствующем функции управления модуля 104 определения переключения на автономное вождение, модуль 104 определения переключения на автономное вождение определяет то, что переключение на движение в режиме автономного вождения является невозможным, и запрещает переключение на движение в режиме автономного вождения.
[0105] Когда "Нет" определяется на этапе S31, после этого на этапе S32, соответствующем функции управления модуля 96 определения неисправностей резервной системы, модуль 96 определения неисправностей резервной системы определяет то, возникает или нет неисправность резервной системы (полная неисправность резервной системы) вследствие неисправности в двух линиях связи, включающих в себя линию 70 CAN-связи и локальную линию 72. Когда неисправность возникает как в линии 70 CAN-связи, так и в локальной линии 72, "Да" определяется на этапе S32. После этого на этапе S42, модуль 104 определения переключения на автономное вождение определяет то, что переключение на движение в режиме автономного вождения является невозможным, и запрещает переключение на движение в режиме автономного вождения.
[0106] Когда "Нет" определяется на этапе S32, после этого на этапе S33, соответствующем функции управления модуля 96 определения неисправностей резервной системы, модуль 96 определения неисправностей резервной системы определяет то, возникает или нет неисправность резервной системы вследствие неисправности в одной линии связи из линии 70 CAN-связи и локальной линии 72. Когда неисправность (частичная неисправность резервной системы) возникает в одной линии связи из линии 70 CAN-связи и локальной линии 72, "Да" определяется на этапе S33. На этапе S43, соответствующем функции управления модуля 104 определения переключения на автономное вождение и модуля 76 управления автономным вождением, модуль 104 определения переключения на автономное вождение определяет то, что переключение на движение в режиме автономного вождения является возможным, и модуль 76 управления автономным вождением выполняет переключение на движение в режиме автономного вождения.
[0107] Когда "Нет" определяется на этапе S33, после этого на этапе S34, соответствующем функции управления модуля 92 определения неисправностей при блокировке, модуль 92 определения неисправностей при блокировке определяет то, возникает или нет неисправность при блокировке при парковке. Когда неисправность при блокировке при парковке обнаруживается, "Да" определяется на этапе S34. После этого на этапе S43, соответствующем функции управления модуля 104 определения переключения на автономное вождение и модуля 76 управления автономным вождением, модуль 104 определения переключения на автономное вождение определяет то, что переключение на движение в режиме автономного вождения является возможным, и модуль 76 управления автономным вождением переключается на движение в режиме автономного вождения. Когда неисправность при блокировке при парковке не обнаруживается, "Нет" определяется на этапе S34. На этапе S35, соответствующем функции управления модуля 94 определения неисправностей при переключении передач, модуль 94 определения неисправностей при переключении передач определяет то, возникает или нет неисправность при переключении передач. Когда неисправность при переключении передач не обнаруживается, "Нет" определяется на этапе S35. На этапе S43, модуль 104 определения переключения на автономное вождение определяет то, что переключение на движение в режиме автономного вождения является возможным, и модуль 76 управления автономным вождением выполняет переключение на движение в режиме автономного вождения. Когда неисправность при переключении передач обнаруживается, "Да" определяется на этапе S35. На этапе S41, соответствующем функции управления модуля 104 определения переключения на автономное вождение, модуль 104 определения переключения на автономное вождение определяет то, прогнозируется или нет то, что переключение переднего-заднего хода выполняется до того, как транспортное средство достигает целевого местоположения. Когда модуль 104 определения переключения на автономное вождение определяет то, что переключение переднего-заднего хода не выполняется вплоть до целевого местоположения, "Нет" определяется на этапе S41. После этого на этапе S43, модуль 104 определения переключения на автономное вождение определяет то, что переключение на движение в режиме автономного вождения является возможным, и модуль 76 управления автономным вождением выполняет переключение на движение в режиме автономного вождения. Когда модуль 104 определения переключения на автономное вождение определяет то, что переключение переднего-заднего хода выполняется вплоть до целевого местоположения, "Да" определяется на этапе S41. После этого на этапе S42, соответствующем функции управления модуля 104 определения переключения на автономное вождение, модуль 104 определения переключения на автономное вождение определяет то, что переключение на движение в режиме автономного вождения является невозможным, и запрещает переключение на движение в режиме автономного вождения.
[0108] Как описано выше, в настоящем варианте осуществления, когда неисправность возникает в системе 74 управления переключением передач, которая переключает диапазон переключения передач во время движения в режиме вождения вручную, и затем водитель выполняет операцию переключения для переключения на движение в режиме автономного вождения (включающее в себя автономную парковку), определяется то, что переключение на движение в режиме автономного вождения является невозможным, и переключение на движение в режиме автономного вождения запрещается, когда неисправность затрудняет достижение, посредством транспортного средства, целевого местоположения. В отличие от этого, когда неисправность представляет собой неисправность, которая не препятствует достижению, посредством транспортного средства, целевого местоположения посредством движения в режиме автономного вождения, определяется то, что переключение на движение в режиме автономного вождения является возможным, и переключение на движение в режиме автономного вождения выполняется. Это ограничивает запрет на переключение на движение в режиме автономного вождения и автономную парковку больше, чем требуется, приводя к увеличению окружения, в котором выполняется движение в режиме автономного вождения. Как результат, удобство движения в режиме автономного вождения повышается. Следовательно, в настоящем варианте осуществления, также получается преимущество, идентичное преимуществу в вышеуказанном варианте осуществления.
[0109] Хотя варианты осуществления настоящего изобретения подробно описываются на основе чертежей, настоящее изобретение также применяется к другим аспектам.
[0110] Например, настоящее изобретение может реализовываться посредством комбинирования каждого из раскрытых вариантов осуществления. Более конкретно, когда неисправность обнаруживается во время движения в режиме автономного вождения и автономной парковки, модуль 90 определения продолжения автономного вождения может определять то, является или нет продолжение движения в режиме автономного вождения и автономной парковки возможным, согласно типу обнаруженной неисправности. Когда неисправность обнаруживается во время движения в режиме вождения вручную, модуль 104 определения переключения на автономное вождение может определять то, является или нет переключение на движение в режиме автономного вождения и автономную парковку возможным, согласно типу обнаруженной неисправности.
[0111] В вышеуказанных вариантах осуществления, транспортное средство 10 выполнено с возможностью обеспечивать переключение между движением в режиме вождения вручную и движением в режиме автономного вождения. Тем не менее, настоящее изобретение не ограничено транспортным средством 10, которое обеспечивает переключение между движением в режиме вождения вручную и движением в режиме автономного вождения. Таким образом, настоящее изобретение также является применимым к транспортному средству, которое может выполнять только движение в режиме автономного вождения. Когда неисправность возникает в системе управления переключением передач в то время, когда транспортное средство, которое может выполнять только движение в режиме автономного вождения, движется, модуль 90 определения продолжения автономного вождения определяет то, может или нет транспортное средство достигать целевого местоположения посредством движения в режиме автономного вождения, согласно типу возникающей неисправности. Когда неисправность представляет собой неисправность, которая не препятствует достижению, посредством транспортного средства, целевого местоположения, движение в режиме автономного вождения продолжается. Это ограничивает отмену движения в режиме автономного вождения больше, чем требуется, и ограничивает остановку транспортного средства в предписанном островке безопасности. Как результат, удобство движения в режиме автономного вождения повышается.
[0112] Варианты осуществления имеют такую конфигурацию, в которой модуль 91 определения неисправностей ECU, модуль 92 определения неисправностей при блокировке при парковке, модуль 94 определения неисправностей при переключении передач и модуль 96 определения неисправностей резервной системы определяют возникновение неисправности. Тем не менее, по меньшей мере, один из этих модулей может обнаруживать неисправность, и правильность движения посредством движения в режиме автономного вождения может определяться согласно типу обнаруженной неисправности.
[0113] В вышеуказанных вариантах осуществления, когда неисправность возникает во время движения в режиме автономного вождения и автономной парковки, модуль 90 определения продолжения автономного вождения определяет то, является или нет продолжение движения в режиме автономного вождения и автономной парковки возможным, согласно типу неисправности. Тем не менее, когда неисправность возникает в любом из движения в режиме автономного вождения и автономной парковки, модуль 90 определения продолжения автономного вождения может определять то, является или нет продолжение движения в режиме автономного вождения или автономной парковки возможным, согласно типу неисправности. Когда неисправность возникает во время движения в режиме вождения вручную, модуль 104 определения переключения на автономное вождение определяет то, является или нет переключение на движение в режиме автономного вождения и автономную парковку возможным, согласно типу неисправности. Тем не менее, модуль 104 определения переключения на автономное вождение может определять то, является или нет возможным переключение на любое из движения в режиме автономного вождения и автономной парковки.
[0114] При движении в режиме автономного вождения по вышеуказанным вариантам осуществления движущая сила, диапазон переключения передач, угол поворота при рулении и тормозная сила управляются автономно. Тем не менее, движение в режиме автономного вождения настоящего изобретения не обязательно ограничивается этим. Для движения в режиме автономного вождения достаточно того, что, по меньшей мере, одна из движущей силы, диапазона переключения передач, угла поворота при рулении и тормозной силы автономно управляется для движения, т.е. достаточно того, что, по меньшей мере, некоторые из этих параметров управляются для движения независимо от операции водителя. Другими словами, движение в режиме автономного вождения может выполняться, в то время как часть из движущей силы, диапазона переключения передач, угла поворота при рулении и тормозной силы зависит от операции водителя. Например, движение в режиме автономного вождения может реализовываться таким образом, что движущая сила и тормозная сила автономно управляются, и в силу этого транспортное средство движется на заданной скорости транспортного средства, или следует за впереди идущим транспортным средством при поддержании предписанного расстояния между транспортными средствами.
[0115] В вышеуказанных вариантах осуществления, в случае если неисправность при переключении передач возникает во время движения в режиме автономного вождения, и переключение переднего-заднего хода выполняется вплоть до целевого местоположения, движение в режиме автономного вождения отменяется. Тем не менее, когда текущее местоположение транспортного средства дистанцируется от местоположения, в котором выполняется переключение переднего-заднего хода, продолжение движения в режиме автономного вождения может разрешаться вплоть до окрестности местоположения, в котором выполняется переключение переднего-заднего хода. В вышеуказанных вариантах осуществления, в случае если неисправность при переключении передач возникает во время движения в режиме вождения вручную, и затем выполняется операция переключения для переключения на движение в режиме автономного вождения, переключение на движение в режиме автономного вождения запрещается, когда переключение переднего-заднего хода выполняется вплоть до целевого местоположения. Тем не менее, когда текущее местоположение транспортного средства дистанцируется от местоположения, в котором выполняется переключение переднего-заднего хода, переключение на движение в режиме автономного вождения может разрешаться, чтобы обеспечивать возможность транспортному средству выполнять движение в режиме автономного вождения вплоть до окрестности местоположения, в котором выполняется переключение переднего-заднего хода. То есть в случае, когда в системе управления переключением передач возникает неисправность, близость местоположения, в котором выполняется переключение вперед-назад, когда переключение вперед-назад выполняется до целевого местоположения, соответствует одному из целевого местоположения в настоящем изобретении.
[0116] В вышеуказанных вариантах осуществления, ECU 56 переключения передач по проводам и HV-ECU 54 соединяются через две линии связи, включающие в себя линию 70 CAN-связи и локальную линию 72. Тем не менее, число линий связи не ограничено двумя. ECU 56 переключения передач по проводам и HV-ECU 54 могут соединяться через три или более линий связи, и диапазон переключения передач может переключаться с использованием каждой из линий связи.
[0117] В вышеуказанных вариантах осуществления, порядок этапов и т.п. на блок-схемах последовательности операций способа, показанных на фиг. 3, 4, 6 и 7, может надлежащим образом изменяться без вызывания несоответствия.
[0118] Раскрытые варианты осуществления представляют собой просто примеры, и настоящее изобретение может выполняться в аспектах, к которым различные компоновки и модификации применяются на основе сведений специалистов в данной области техники.
Реферат
Изобретение относится к устройству управления транспортного средства. Устройство управления транспортного средства, применяемое к транспортному средству, включает в себя систему управления переключением передач, выполненную с возможностью переключения диапазона переключения передач. Причем устройство управления транспортного средства выполнено с возможностью управления транспортным средством для осуществления движения в режиме автономного вождения независимо от операции водителя в одной операции вождения. При этом устройство управления транспортного средства содержит контроллер, выполненный с возможностью определения правильности движения посредством движения в режиме автономного вождения согласно типу неисправности, которая возникает в системе управления переключением передач, и выполненный с возможностью выполнения управления движением транспортного средства согласно указанной правильности движения посредством движения в режиме автономного вождения. Достигается своевременное переключение передач в режиме автономного вождения, когда неисправность возникает в системе управления переключением передач. 7 з.п. ф-лы, 7 ил.
Комментарии