Способ позиционирования вагона для токарной обработки поверхности катания колесной пары без выкатки тележки - RU2758365C1
Код документа: RU2758365C1
Чертежи
Описание
Предлагаемое изобретение относится к области железнодорожного транспорта и предназначено для использования в процессе ремонта колесных пар вагонов и локомотивов без выкатки тележки.
В настоящее время для токарной обработки поверхностей катания колесных пар вагонов и локомотивов находят применение специальные токарные станки, позволяющие обрабатывать указанные поверхности без выкатки тележек. Станки обычно размещают в смотровой яме, над которой устанавливают вагон, а затем последний приподнимают так, чтобы колесная пара перестала касаться рельсов. Позиционировав вагон таким образом, колесной паре, подлежащей обработке, придают вращение, а затем ее поверхности катания обтачивают, срезая с них дефектный слой металла (см. статью: А.Ф. Богданов, И.А. Иванов, П.М. Терехов. Восстановление профиля поверхности катания колесных пар без выкатки / Бюллетень результатов научных исследований. С.- Петербург: изд. Петербургского госуд. ун-та путей сообщения, 2014, №1, стр. 58-68).
Недостатком существующего способа позиционирования вагона является низкая точность, что затрудняет расположение оси обрабатываемой оси колесной пары на линии поперечного перемещения вершины резца токарного станка, снижает качество обработки поверхностей катания и стойкость резца.
Проблемой, решаемой предполагаемым изобретением является повышение точности позиционирования вагона для последующей токарной обработки поверхности катания.
Технически решение указанной проблемы решается путем того, что способ позиционирования вагона для токарной обработки поверхности катания колесной пары без выкатки тележки, включающий перемещение вагона по рельсам до его установки над смотровой ямой, в которой расположен колесотокарный станок, с контактом его кузова с тупиковым упором, и подъем вагона на расчетную высоту с обеспечением заданного расположения оси обрабатываемой колесной пары относительно вершины резца колесотокарного станка, отличается от существующего тем, что расчетную высоту х подъема вагона определяют из соотношения:

а - измеренное расстояние между торцом тележки с колесной парой, подлежащей обработке, и передней поверхностью тупикового упора,
b - априорно известное расстояние от торца тележки до оси колесной пары, подлежащей обработке,
с - априорно известное расстояние между передней поверхностью тупикового упора и плоскостью переднего торца смотровой ямы,
d - априорно известное расстояние от вершины резца колесотокарного станка до переднего торца смотровой ямы,
е - априорно известное расстояние от вершины резца колесотокарного станка до дна ямы, соответствующее расстоянию d,
ƒ - априорно известное расстояние от поверхности рельсов до дна смотровой ямы,
R - априорно известный средний радиус колес пары, подлежащей обработке,
α - угол наклона линии перемещения вершины резца колесотокарного станка относительно горизонтальной плоскости.
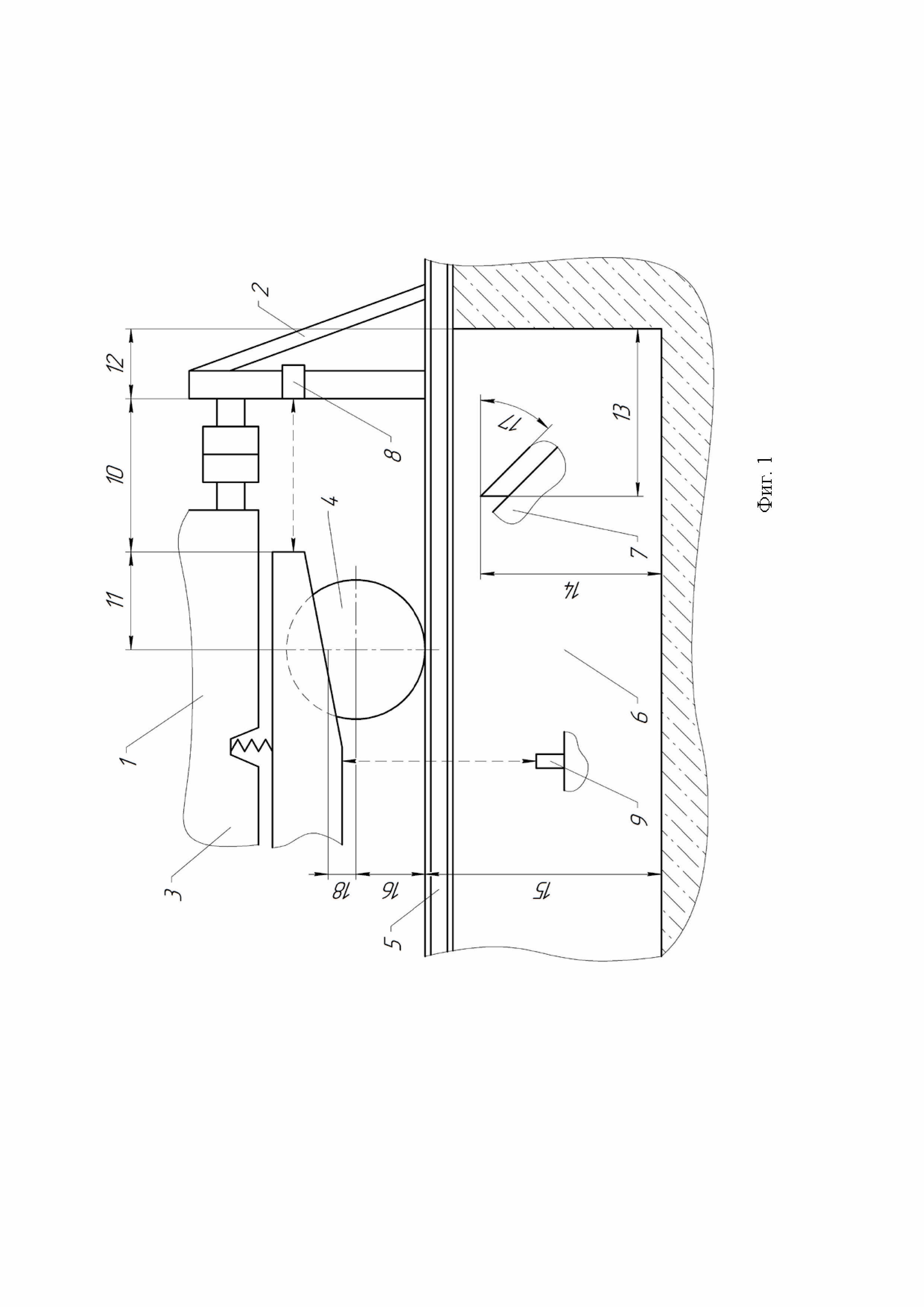
Схема реализации предлагаемого способа показана на фиг. 1. На данной фигуре 1 - кузов вагона с буфером, 2 - тупиковый упор, 3 - вагонная тележка с колесной парой 4, подлежащей обработке, 5 - рельсы, 6 - смотровая яма, 7 - колесотокарный станок, размещенный в яме, 8 - дальномер, закрепленный на упоре 2 (например, лазерный дальномер Lomvum LV 50, обеспечивающий точность измерения ±1 мм), 9 - аналогичный дальномер, размещенный на дне ямы, 10 - параметр а, 11 - параметр b, 12 - параметр с, 13 - параметр d, 14 - параметр е, 15 - параметр ƒ, 16 радиус R колес пары 4, 17 - параметр α, 18- параметр х.
При использовании способа вагон 1 вначале перемещают по рельсам 5 до взаимодействия с упором 2 и устанавливают над смотровой ямой 6. С помощью дальномера 8 измеряют параметр а (расстояние 10 между торцом тележки 3 и передней поверхностью тупикового упора 2). Параметры 11 (b), 12 (с), 13 (d), 14 (е), 15 (ƒ), 16 (R), 17 (α) к этому времени должны быть известны априорно. Далее определяют х по формуле:

а затем (например, с помощью домкрата или краном) поднимают вагон на величину х, непрерывно измеряя высоту подъема с помощью дальномера 9 (или иного измерительного устройства). В результате ось колесной пары 4 оказывается точно на линии поперечного перемещения вершины резца станка 7.
Пусть, например, известно, что параметры 11 (b), 12 (с), 13 (d), 14 (е), 15 (ƒ), 16 (R) и 17 (α) равны, соответственно, 40 см, 55 см, 80 см, 110 см, 120 см, 35 см и 45°. Переместим вагон 1 до взаимодействия с упором 2 и измерим дальномером 8 расстояние 10 (а). Допустим, получилось а=65 см. Определим величину х по приведенному выше соотношению и получим х=35 см. Поднимем вагон на 35 см, для чего в процессе подъема будем непрерывно измерять текущую высоту подъема и прекратим последний при достижении х=35 см.
Спозиционировав вагон описанным образом, мы точно расположим ось колесной пары, подлежащей обработке, на линии поперечного перемещения вершины резца токарного станка, что обеспечит повышение качества последующей токарной обработки поверхностей катания колесных пар и увеличение периода стойкости резца колесотокарного станка. Это решает поставленную проблему и является требуемым техническим результатом предложения.
Реферат
Изобретение относится к области ремонта колесных пар железнодорожного транспорта без выкатки тележек. Способ характеризуется тем, что вагон перемещают по рельсам до взаимодействия его кузова с тупиковым упором и устанавливают над смотровой ямой, измеряют расстояниеaмежду торцом тележки с колесной парой и передней поверхностью тупикового упора, а затем, непрерывно измеряя текущую высоту подъема вагона, производят его подъем на высотуx, определенную из соотношения: x = (a + b + c – d)⋅tgα – f – R + e, гдеb- расстояние торца тележки от оси пары,c- расстояние между передней поверхностью тупикового упора и плоскостью переднего торца смотровой ямы,d-расстояние от вершины резца, размещенного в яме колесотокарного станка, до переднего торца ямы,e- расстояние от вершины резца колесотокарного станка до дна ямы,f- расстояние от поверхности рельсов до дна ямы,R- средний радиус колес пары, подлежащей обработке,α- угол наклона линии перемещения вершины резца станка относительно горизонтальной плоскости. Использование изобретения позволяет повысить точность позиционирования колесной пары, что обеспечивает повышение качества ее обточки. 1 ил.
Формула
Документы, цитированные в отчёте о поиске
Мобильный станок для обточки колесных пар
Комментарии