Система управления для остановки шпинделя в определенном угловом положении - SU1308185A3
Код документа: SU1308185A3
Чертежи



Описание
11
Изобретение относится к системе остановки шпинделя в заданном угловом положении, в частности к системе для остановки определенной точки на шпинделе в любом из двух заданных угловых положений.
Целью изобретения является расширение технологических возможностей.
Поставленная цель достигается тем, что предусматривается единая цепь управления с раздельными датчиками для ориентации в положении смены инструмента и ввода инструмента в расточку детали.
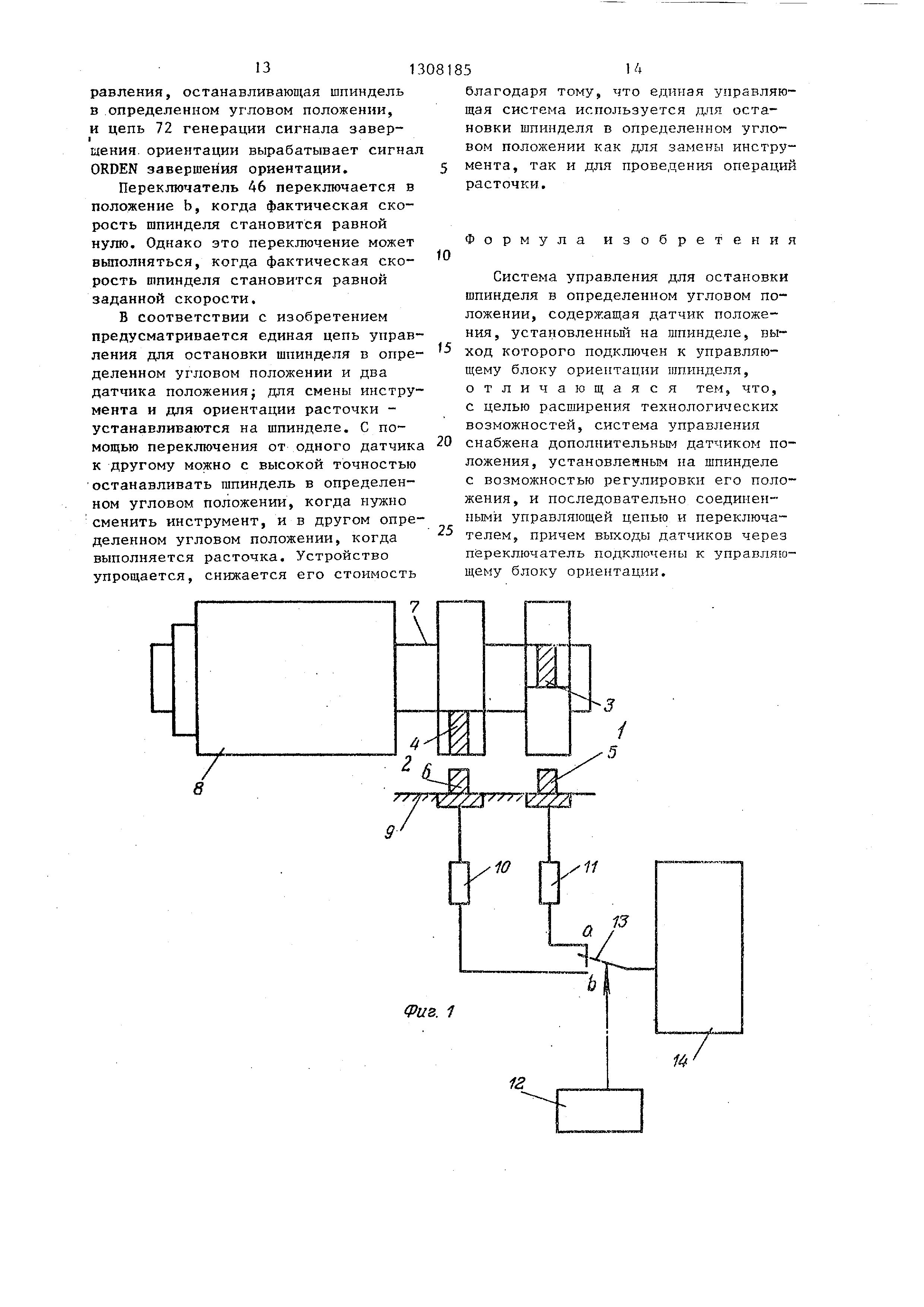
На фиг. 1 изображена схема системы управления остановкой шпинделя в определенном угловом положении; на фиг.. 2 - блок-схема цепи управления
остановкой шпинделя; на фиг. 3 и 4 - диаграммы сигналов в цепи, изображенной на фиг. 2 на фиг. 5 - схема магнитного датчика на фиг. 6 - схема магнитного и чувствительного элементов j на фиг 7 - схема насьш(аемого реактора; на фиг. 8 - сигналы, получаемые с чувствительных цепей; на фиг. 9 и 11 - схема реактора; на фиг. 10. 12 и 13 - диаграммы, поясняющие работу реактора; на фиг. 14 - блок-схема генерации сигнала позиционного отклонения, на фиг. 15 - временная диаграмма сигналов в цепи на фиг.14.
Устройство содержит первый 1 и второй 2 датчики положения, которые представляют собой магнитные датчики состоящие, например, из магнитов 3 и 4 и чувствительных элементов 5 и 6 Магниты 3 и 4 закреплены на шпинделе 7, входящем в шпиндельньш механизм 8, а чувствительные элементы 5 и 6 неподвижно закреплены на механически неподвижной части 9 инструмента станка. Первый датчик 1 положения используется при остановке шпинделя 7 в определенном угловом пложении во время выполнения операции расточки, а второй датчик 2 в время выполнения операции автоматической смены инструмента. Поскольку угловое положение, в котором шпиндель останавливается при автоматичекой смене инструмента, фиксировано, то магнит 4 второго датчика 2 положения прикрепляется к определенной точке шпинделя неподвижно. При вьшол нении операции расточки угловое положение , в котором должен остановит
5
0
5
0
5
Q
5
0
5
ся шпиндель, зависит от формы и расположения прорези для резца в заготовке . Поэтому магнит 3 первого датчика 1 положения устанавливается на шпинделе 7 с возможностью перемещения в любое требуемое положение. Для усиления сигналов, вырабатываемых датчиками 1 и 2, служат усилители 10 и 11. Предусмотрена также управляющая цепь 12, по команде которой переключатель 13 переключается между выходами усилителей 10 и 11, и выбранный выходной сигнал поступает на управляющий блок 14 ориентации. Когда резец для расточки вводится в заготовку или выводится из нее, переключатель 13 подключается к контакту а, передавая усиленный выходной сигнал первого датчика положения на управляющий блок 14 ориентации , который выполняет оператщю .уп- I равления ориентацией в соответствии
с принимаемым сигналом. Операция управления ориентацией останавливает шпиндель 7, в это время магнит 3, прикрепленный к шпинделю, оказывается напротив чувствительного элемента 5 Когда требуется сменить инструмент, переключатель 13 соединяется с контактом Ь, передавая усиленный выходной сигнал второго датчика 2 положения на цепь 14 управления ориентацией , выполняюшую операцию управления, ориентацией в соответствии с принятым сигналом для остановки шпинделя 7 в таком положении, когда прикрепленный к нему магнит 4 оказывается напротив чувствительного элемента 6.
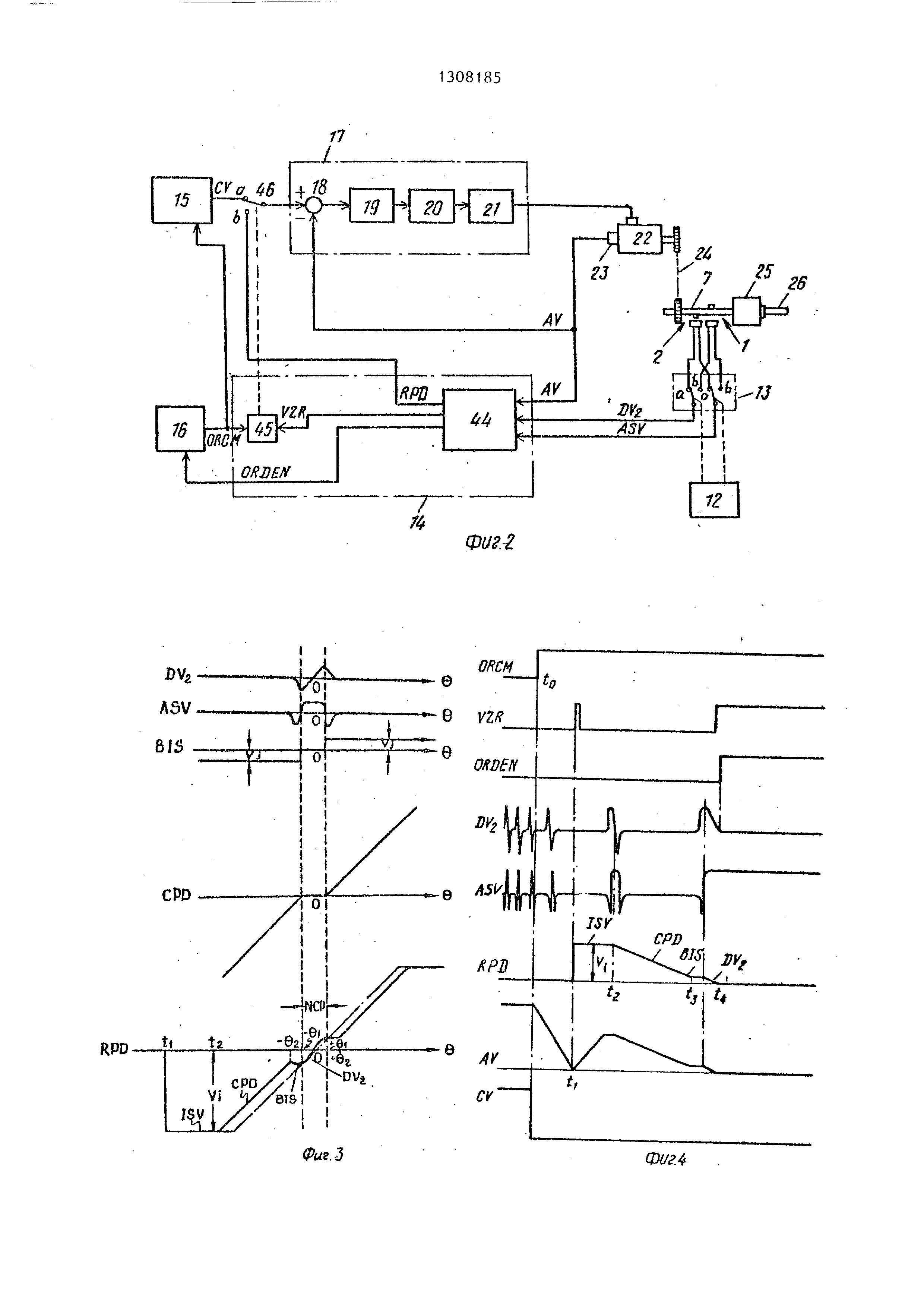
На фиг. 2 представлена блок-схема цепи управления остановкой шпинделя в определенном угловом положении.
Блок 15 команды скорости выраба- тьшает команлу скорости CV, а блогс 16 команды ориентации - команду ORCM ориентации. Блок 17 управления скоростью содержит сумматор 18, цепь 19 фазовой компенсации, соединенную с выходом cyMiviaTopa, преобразователь 20 напряжение - фаза, подключенньм к выходу цепи 19 фазовой компенсации, и тиристорнрда преобразователь-21 на выходе преобразователя 20.
Сут-1матор 18 определяет разность напряжений, соответствующих разности командной скорости CV и фактической скорости AV двигателя постоянного тока, при выполнении операции управления скоростью. Он определяет также разностное напряжение между девиацией углового положения RPD и фактической скоростью AV при выполнении операции управления положением. Цепь 19 фазовой компенсации осуществляет фазовую компенсацию выходного напряжения путем сдвига фазы вперед или назад. Преобразователь 20 напряжение - фаза управляет фазой срабатывания каждого тиристора в тиристор- ном преобразователе 21 в соответствии с выходным напряжением цепи 19 фазовой компенсации, Тиристорный преобразователь 21 работает в соот20
25
нал положителен по одну сторону от нулевой точки и отрицателен по другую , т.е. пересекает нулевой уровень . Сигнальное напряжение ASV получают в результате сложения сигнала
DV.
DV,
ветствии с управляемыми фазами сраба- -5 с центральной линией магнита 3. Сиг- тывания тиристоров, изменяя величину напряжения, подаваемого на двигатель 22 постоянного тока, в результате чего изменяется скорость вращения последнего. При вращении двигателя 22 постоянного тока тахометр 23 вырабатывает напряжение, соответствующее скорости двигателя. Вращательное движение двигателя 22 постоянного тока передается через шестеренную или ременную передачу 24 на щпиндель 7. Шпиндель 7 соединен со шпиндельным механизмом 25, в котором крепится инструмент 26.
. и сигнала, получаемого из путем фазового сдвига на 180°.
Чувствительная цепь, соответствующая одному из насыщаемьк реакторов 31, представлена на фиг. 9. Чувствительная цепь, входящая в блок 27, содержит импульсньш генератор 41, вырабатывающий высокочастотный-импульсный сигнал HFP частотой 100 КГц,
Магнитный датчик 1(2) имеет магнит.-ЗО рдзвязьшающий трансформатор 42 и Ньм элемент 3(4), чувствительный эле- полупериодные выпрямители 43. Насыща- мент 5(6) и электрический блок 27
емый реактор 31 возбуждается высокочастотным импульсным сигналом , передаваемым через развязывающий трансформатор 42. В результате выходное напряжение DV , изображенное на фиг. 8, будет сниматься с выходных контактов а, b блока 27, (напряжение приблизительно пропорционально внешнему магнитному полю Hg,,., напряженность которого изменяется в соответствии с угловым положением магнитного элемента 3).
(фиг. 5).
Магнитный элемент 3 (фиг. 6) состоит из магнитов 28 и 29, имеющих треугольное поперечное сечение и установленных в корпусе 30 таким образом , что напряжение магнитного поля изменяется от полюса S к полюсу N в направлении вращения шпинделя, т.е вдоль стрелки. Чувствительный элемент 5 устанавливается на неподвизк- ной части станка напротив магнитного элемента 3 и содержит три насьпцаемых реактора 31-33 в корпусе 34, ориентированных в направлении вращения шпинделя (фиг. 6). На сердечнике 35 каждого из насыщаемых реакторов намотаны катушки 36 и 37. Эти катушки наматываются так, что их полярности противоположны. Катушки на каждом из сердечников имеют общий контакт 38, на который подается высокочастотный сигнал, а сигналы, определяющие угловое положение магнитного элемента 3, снимаются с контактов 39 и 40 соответствующих катушек.
81854
На фиг. 8 изображены сигналы, получаемые с чувствительных цепей. Этими сигналами снабжаются насыщаемые реакторы 31-33. Эти сигналы возникают , когда магнитный 3 и чувствительный 5 элементы находятся в таком относительном положении, как показано на фиг. 6.
DV, . DV.
10
, , uv, DV, - сигналы чувствительных цепей, соответствующих реакторам 31, 32 и 33. Каждый из этих сигналов имеет нулевое значение, когда центральная линия соответствующего насыщаемого реактора совпадает
нал положителен по одну сторону от нулевой точки и отрицателен по другую , т.е. пересекает нулевой уровень . Сигнальное напряжение ASV получают в результате сложения сигнала
с центральной линией магнита 3. Сиг-
DV.
DV,
с центральной линией магнита 3. Сиг-
. и сигнала, получаемого из путем фазового сдвига на 180°.
Чувствительная цепь, соответствующая одному из насыщаемьк реакторов 31, представлена на фиг. 9. Чувствительная цепь, входящая в блок 27, содержит импульсньш генератор 41, вырабатывающий высокочастотный-импульсный сигнал HFP частотой 100 КГц,
рдзвязьшающий трансформатор 42 и полупериодные выпрямители 43. Насыща-
рдзвязьшающий трансформатор 42 и полупериодные выпрямители 43. Насыща-
емый реактор 31 возбуждается высокочастотным импульсным сигналом , передаваемым через развязывающий трансформатор 42. В результате выходное напряжение DV , изображенное на фиг. 8, будет сниматься с выходных контактов а, b блока 27, (напряжение приблизительно пропорционально внешнему магнитному полю Hg,,., напряженность которого изменяется в соответствии с угловым положением магнитного элемента 3).
Преобразование сигнала DV, снимаемого с контактов блока 27, описывается на примере работы реактора 31.
Когда магнитный элемент 3 находится далеко от насьш1аемого реактора 31 (внешнее магрги.тное поле, воздей- ствуюшее на этот реактор, имеет нулевое значение), высокочастотный импульсный сигнал HFP де ствует относительно вертикальной ну,,свой линии кривой В-Н реактора, как показано на рис. 10. В результате потоки силовых линий, пересекаюнптх катушки 36 и 37, равны ыходиые напряжения, снимаемые с контактов .U и - tO, рав
ны по амплитуде, но смещены по фазе на 180. Поскольку эти напряжения выпрям.пяются соответствующими полу- периодными выпрямителями 43, потенциалы на контактах а и b блока 27 равны, следовательно, напряжение между а и b равно нулю.
По мере того, как магнитный элемент 3 приближается к насыщенному реактору 31, внешнее магнитное поле Hgj(, создаваемое магнитным элементом , начинает воздействовать на реактор . Если поле, создаваемое высокочастотным импульсным сигналом HFP, обозначить как hp, то катушку 36 бу- дет пересекать поток, соответствующий hg+Hgj(, как показано на фиг. 12. Катушку 37 будет пересекать поток, соответствующий hg+Hg. Если это выразить с помощью кривой В-И, то вы- сокочастотный импульсный сигнал HFP будет действовать относительно ли- НИИ - Hgj как относительно нулевой (д.пя катушки 36), как показано на фиг. 12, и относительно линии Hg (для катушки 37), как показано на фиг. 13. Поэтому отрицательно направ ленный поток, пересекающий катушку 36, приводит к насьш;ению сердечника, в результате чего вариации становят- ся меньше. Отрицательно направленньй поток, пересекающий катушку 37, не приводит к насыщению, так что вариации остаются большими. В связи с тем что наведенное напряжение Е принима-
д , ет значение -т-- (где N - число
витков), потенциал на контакте b ста новится больше, чем потенциал на контакте а, что приводит к появлению разности потенциалов между контактами . Эта разность потенциалов изменяется так, как показано на фиг, 8 (кривая DV), поскольку магнит 3 продолжает вращаться.
Переключатель 13 положения переключается по команде цепи 12 управления .
Блок 14 управления ориентации вклчает в себя цепь 44 генерации сигнала девиации углового положения, которая вырабатывает сигнал RPD девиации углового положения, напряжение кото- рого изменяется в соответствии с отклонением углового положения. Вырабатывается также сигнал ORDEV завершения ориентации и сигнал VZR ну
5
0 | : 5
g с
е
0
левой скорости, который принимает значение 1, когда вращательная скорость шпинделя падает до нуля. Переключающая цепь 45 обратной связи запускает переключатель 46 обратной связи на основе сигнала VZR нулевой скорости при условии получения команды . ORCM ориентации от командной цепи 16 ориентации.
Цепь 44 генерации сигнала девиации углового положения принимает поступающее через переключатель 13 напряжение DV2 (которое используется как точный, в отличие от грубого, сигнал девиации углового положения, когда шпиндель находится вблизи от заданного углового положения), соответствующее насьщаемому реактору 32, расположенному в центре датчика 1 или 2, а также сигнал ASV приближения , получаемый путем сложения напряжения DV реактора 31 и напряжения, соответствующего повороту фазы сигна- ла DV реактора 33 на 180. Сигнал ASV показывает, что шпиндель достиг области по соседству с определенным угловым положением. Сигнал AV, указы- вающий фактическую скорость двигателя , поступает в цепь 44 генерации сигнала отклонения углового положения из .тахометра 23 и интегрируется с помощью интегрирующей цепи (не показана). Выход (эквивалентньй величине поворота шпинделя) интегрирую- щей цепи вычитается из установлен-. кого начального напряжения 1 SV. Таким образом, сигнал AV преобразуется в грубый сигнал CPD отклонения углового положения. Величина V- напряжения ISV выбирается равной напряжению отклонения углового положения, соот- ветствуЕОщему одному обороту (360°) шпин деля.Далее цепь 44 генерации сигнала отклонения углового положения формирует сигнал BIS смещения, остающийся в цепи, амплитуда которого эквивалентна пиковому значению точного сигнала отклонения углового положение .
Когда команда CV скорости падает до нуля, в соответствии с командой OR СМ ориентации, поступающей из ко- мандной цепи 16 ориентации, вращательная скорость шпинделя уменьшается в конце концов (в момент t ) пада-i ет до нуля (сигнал нулевой скорости VZR принимает значение 1). Цепь 44 генерации сигнала отклонения углово713
го положения вырабатывает заранее заданное напряжение ISV начиная с момента , когда сигнал нулевой скорости принимает значение 1, до времени t2, когда шпиндель в первый раз до- стигает определенного углового положения . После этого, поскольку шпиндель продолжает вращаться и магнитный элемент 3 (заданная точка на шпинделе) приближается к определенному угловому положение во второй раз, вырабатывается грубый сигнал CPD отклонения положения до тех пор, пока магнит 3 подходит ближе к области NCP (расположенной между точками -- 0 и + 0 ) в пределах заданного углового положения, т.е. до тех пор, пока он не подходит к точке - Кроме того, пока не достигается упомянутая область NCP, вырабатывается сигнал BIS смещения. Точньш сигнал DV отклонения вырабатывается после того, как магнит 3 входит в область NCP в пределах заданного углового положения. В результате этих опера- дни вырабатывается сигнал RPD отклонения углового положения, изображенный на фиг. 3. Сигнал BIS смещения может быть исключен из сигнала RPD с помощью установки 02 равньм б,..
Предположим, что переключатель 13 соединен с контактами « , день 44 генерации сигнала отклонения углового положения принимает выходной сигнал второго магнитного датчика 2, который используется при смене -инструмента описанным выше образом.
Во время вращения шпинделя переключатель 13 соединен со стороной а в результате чего образуется цепь обратной связи, управляющая скоростью Более конкретно, сумматор 18 контактом d принимает командный сигнал CV скорости, приходящий из командной цепи 15 скорости, и сигнал средней скорости, поступающий от тахометра 23, и вырабатывает в ответ напряжение девиации (отклонения) угловой скорости . Преобразователь 20 напряжение - фаза управ.пяет углом (фазой) запуска тиристоров в тиристорном преобразователе 21 в соответствии с напряжением девиации скорости. В результате . тиристорный преобразователь 21 регулирует напряжение, подводимое к дви- гателю 22 постоянного тока. Такиг- образом, фактическая скорость AV двигателя 22 рег улируется в соответствии
58
с командной скоростью CV. В дальнейшем контур управления скоростью регулирует скорость двигателя таким образом , чтобы девиации скорости стремилась к нулю и шпиндель вращался при сохранении постоянной девиации скорости.
Когда обработка завершена, цифровое управляющее устройство посылает сигнал в командную цепь 16 ориентации для посылки команды ORCM ориентации в контур цепи 45 переключения в мо- мент времени t. Одновременно команда ORCM ориентации поступает в командную цепь 15 скорости, и команда CV скорости падает до нуля. Вследствие этого фактическая скорость AV снижается и в момент времени t становится равной нул}о, В это время, в цепи 44 генер-ации сигнала отклонения положения вырабатьгоается сигнал VZR нулевой скорости, приводящий к тому, что цепь 45 переводит переключатель 46 в сторону контакта Ь; Теперь работа цепи направлена на управление положением вместо управления скоростью, В ответ на сигнал VZR нулевой скорости цепь 44 генерации сигнала девиации положения вырабатьшает сначала исходное напряжение ISV величиной V. . В ответ на этот сигнал шпиндель начинает вращаться снова, а сигнал AV, соответствующий фактической скорости , стремится принять значение V. По мере того как магнитньш элемент 4 второго магнитного датчика 2 продолжает вращаться и достигает определенного углового положения в первый раз (момент tj ) ,цепь 44 генерации сигнала отклонения углового положения начинает вырабатьшать грубый
сигнал CPD отклонения положения. Шпиндель продолжает вращаться, и магнит 4 приближается к области N СР (фиг. 3) в пределах определенного углового положения (момент tj), а цепь 44 генерации сигнала отклонения положения вырабатьшает сигнал BIS смещения. Когда магнитный элемент 4 попадает в область NCP (момент t), начинается генерация точного сигнала V отклонения положения. После того, как сигнал DV2 падает до нуля, т.е. огда магнитньй элемент 4, располоенный на заданной части шпинделя, аходится непосредственно перед насыаемым реактором 32, шпиндель прекращает вращение. На этом за15
25
канчивается управление положением шпинделя.
Если при выполнении операции расточки резкущий инструмент требуется ввести в заготовку или вывести из 5 нее, то переключатель 46 переключает-. ся в положение В по управляющему сигналу , поступающему из цепи 12 управления . После этого выполняется операция ориентации, идентичная описан- ной вьппе, приводящая к остановке шпинделя в определенном угловом положении , позволяющем осуществить введение или вьшедение резца.
Схема цепи 44 генерации сигнала отклонения углового положения представлена на фиг. 14, а графики возникающих в ней сигналов - на фиг. 15.
На фиг. 14 изображен блок 47, предназначенный для формирования ходно о напряжения ISV и сигнала RIS смещения, для интегрирования напряжения сигнала AV фактической скорости и Для вычитания выходного напряжения . Получающегося в результате интегрирования, из исходного напряжения ISV. Переключатель 48 переключается к контакту +15В или к контакту -15В в соответствии с направлением вращения шпинделя. Если шпиндель вращается в прямом направлении., то производится подключение к -15В. Это напряжение делится на резисторах г , Гл, и конденсатор С заряжается сигналом, проходящим через усилитель 35 49, резистор г и выключатель 50, причем напряжение, до которого заряжается конденсатор, стремится к величине V. исходного напряжения ISV. Если сигнал AV фактической скорости входит в блок 47 через выключатель 51 или 52 после того, как вьжлючатель .50 разомкнут, конденсатор С разряжается с постоянной времени RC, поскольку величина напряжения сигнала фактической скорости AV меньше, чем V.., и грубьй сигнал СРВ отклонения положения, получаемьй в результате вычитания выходного напряжения, яв-.. ляющегося результатом интегрирования сигнала AV фактической скорости, из исходного напряжения ISV, появляется на выходе усилителя 49. Усилитель 49, резистор R и конденсатор С образуют интегрирующую цепь. Если выключатели 50 и 53 после того, как напряжение сигнала СРВ достигает заданного значения V-, то блок 47 дей30
45
50
55
5
5
5 .
О 35
0
45
50
55
ствует как усилитель, и на выходе усилителя 49 появляется сигнал RIS смещения, имеющий заданный уровень V., т.е. включение и синхронизация замыкания и размыкание выключателей 50-53 обеспечивают сначала передачу исходного напряжения ISV, затем передачу сигнала СРВ грубого отклонения и, наконец, сигнала BIS смещения.
Цепи 54 и 55 служат для переключений усиления в соответствии с передаточным отношением. Эти цепи повышают усиление цепи управления положением , когда передача между двигателем 22 постоянного тока и шпинделем 7 является малой (редукционное отношение велико), и снижают усиление при больших передачах (редукционное отношение мало), т.е. снижают коэффициент усиления по сравнению с усилением при высоком редукционном отношении. Когда редукционное отношение велико, выключатели 51 и 56 замыкаются , увеличивая усиление, а когда редукционное отношение мало, выключатели 52 и 57 замыкаются, уменьшая усиление. Это предотвращает раскачку и позникновение резких толчков при остановке шпинделя в определенном угловом положении и обеспечивает возможность остановки шпинделя за более короткое время независимо от величины редукционного отношения.
Блок 58 определения абсолютной величины вычисляет абсолютное значение сигнала из цепи 47. Компаратор 59 определяет, не снизился ли грубый сигнал СРВ девиации положения ниже заданного уровня, и вырабатывает сигнал IVRPS, который указьтает, что определенньй участок (магнитный элемент 3 (4) датчиков 1(2) приблизился к области (от -в до + л фиг. 3) в пределах определенного углового положения остановки. По сигналу NRPS выключатели 50 и 53 замыкаются .
Цепь 60 регулировки усиления регулирует усиление в соответствии с зазором между магнитами 3 или 4 и соответствующими чувствительными эле-/ , ментами 5 или 6 и вьфабатывает регистрационный сигнал BVji (точный сигнал отклонения положения), имеющий за- данньй наклон. Пороговая цепь 61 обрезает сигнал ASV приближения на определенном уровне и вырабатьтает сигнал LS, которьй указывает, что ка
П1
кой-то из магнитов достиг области NCP (фиг, 3) в пределах определенного углового положения. По сигналу LS выключатели 62 и 63 размыкаются, а выключатель 64 замыкается. В результате выдается сигнал точного углового отклонения, который служит . сигналом девиации.
Цепь 65 прямого и обратного переключения имеет выключатель 62, который в замкнутом состоянии пропускает выходной сигнал блока 58 абсолютного значения, если шпиндель должен вращаться в прямом направлении. Если шпиндель должен вращаться в обратном направлении, то замыкается выключатель 63, пропуская выходной сигнал блока 58 абсолютного значения, инвертированный в усилителе 66, Цепь 67 генерации сигнала INPOS, содержащая компаратор, обрабатывает точный сигнал DVj девиации положения и вырабатывает сигнал INPOS, когда шпиндель находится в пределах заданного углового положения. Сигнал INFOS подается на цепь генерации сигнала завершения ориентации.
Компараторы 68 и 69 обрабатывают
сигнал DV- девиации положения и вырабатывают сигналы NEG и РОЗ, указывающие , с какой стороны шпиндель приближается к определенному угловому положению: при вращении шпинделя в обратном направлении сигнал NEG равен 1, а при вращении шпинделя в прямом направлении сигнал РОЗ принимает значение ,1. Один из выключателей 62, 63 замыкается, а второй размыкается по сигналам VZR и L3 в зависимости от того, какой из сигналов (NEG или РОЗ) равен 1. Цепь 70 синтеза сигнала пропускает точный или грубый сигнал девиации углового положения в соответствии с состоя- нием выключателей 64, 62 и 63. Цепь 71 регистрации скорости принимает напряжение AV, указывающее фактическую скорость шпинделя, и вырабатывает сигнал VZR нулевой скорости, когда AV спадает до нуля. Цепь 72 генерации сигнала завершения ориентации принимает сигнал INP03, сигнал нулевой скорости V2R и командный сигнал ORCM ориентации и вычисляет логическое произведение этих сигналов , в результате чего сигнал ORDEN завершения ориентации создается, когда все сигналы INP03, VZR и ORCM равны 1.
5
12
Итак, если команда ORCM ориентации принимает значение 1 в момент времени to, командная скорость CV падает до нуля, в результате чего фактическая скорость AV снижается до нуля и сигнал нулевой скорости VZR принимает значение 1, Когда это происходит, переключатель 46 в цепи обратной связи переключается в положение b, один
o
из выключателей 56, 57 замыкается в соответствии с малым или большим передаточным отношением, а один из выключателей 62, 63 замыкается в зависимости от направления (прямого
5 или обратного) вращения шпинделя. Так образуется контур управления положением , в котором исходное напряжение ISV подается через переключатель 46. Выключатель 50 замкнут, а выключате0 ли 51-53 разомкнуты. Двигатель 22 постоянного тока (фиг. 2) начинает вращаться снова, шпиндель поворачивается и в первый раз достигает определенного углового положения (т.е.
5 сигналы L3 и INP03 равны 1). Поэтому в момент t2 выключатель 50 размыкается , а один из выключателей 51, 52 замыкается в соответствии с.передаточным числом. В результате гру0 бый сигнал CPD отклонения положения CHiiMaeTCH с переключателя 46. После того, как фактическая скорость и девиация отклонения снизятся и шпиндель приблизится к зоне в области определенного углового положения (момент t), компаратор 59 вырабатывает сигнал NRPS, равньш 1, в результате чего выключатели 50 и 53 замыкаются. Таким образом, сигнал BIS смещения заданного уровня снимается с переключателя 46. По мере того , как шпиндель продолжает вращаться с меньшей скоростью и достигает области NCP в пределах определенного
5 углового положения (в момент t),
сигнал LS переходит в состояние 1,5 выключатели 62 и 63 размыкаются, а выключатель 64 замыкается. Поэтому через переключатель 46 проходит сигнал DVj точного отклонения положения . Когда магнитный элемент 3 или 4 (заданная точка на шпинделе) подходит близко к определенному угловому положению, вырабатывается сигнал INPOS. Вслед за этим фактическая скорость шпинделя падает до нуля, в результате чего сигнал пулевой скорости VZR возвращается к значению 1. На этом заканчивается операция уп5
0
0
5
равления, останавливаюп1ая шпиндель в определенном угловом положении, и цепь 72 генерации сигнала завер- иения. ориентации вырабатывает сигнал ORDEN завершения ориентации.
Переключатель 46 переключается в положение Ь, когда фактическая скорость шпинделя становится равной нулю. Однако это переключение может выполняться, когда фактическая скорость шпинделя становится равной заданной скорости.
Б соответствии с изобретением предусматривается единая цепь управления для остановки шпинделя в определенном угловом положении и два датчика положения; для смены инструмента и для ориентации расточки - устанавливаются на шпинделе. С помощью переключения от одного датчика к другому можно с высокой точностью останавливать шпиндель в определенном угловом положении, когда нужно сменить инструмент, и в другом определенном угловом положении, когда выполняется расточка. Устройство упрощается, снижается его стоимость
благодаря тому, что единая управляющая система используется д.ая остановки шпинделя в определенном угловом положении как для замены инструмента , так и для проведения операций расточки.
Формула изобретения
Система управления для остановки шпинделя Б определенном угловом положении , содержащая датчик положения , установленньм на шпинделе, выход которого подключен к управляющему блоку ориентации шпинделя, отличающаяся тем, что, с целью расширения технологических возможностей, система управления снабжена дополнительным датчиком положения , установленным на шпинделе с возможностью регулировки его положения , и последовательно соединенными управляющей цепью и переключателем , причем выходы датчиков через переключатель подключены к управляющему блоку ориентации.




Реферат
Изобретение относится к системе остановки шпинделя в заданном угловом положении, в частности к системе для остановки определенной точки на шпинделе в любом из двух заданных угловых положений. Целью изобретения является расширение технологических возможностей станка. Поставленная цель достигается тем, что предусматривается единая цепь управления с раздельными датчиками, служащими для ориентации шпинделя в положении смены инструмента и положении ввода инструмента в расточку детали, причем датчик для ориентахщи положения шпинделя д.пя ввода инструмента в расточку детали вьтолнен регулируемым по положению, на шпинделе. . 15 ил. § О) с
Формула
Комментарии