Способ управления электромагнитным клапаном и устройство для его осуществления - RU2756292C1
Код документа: RU2756292C1
Чертежи






Описание
Предлагаемое изобретение относится к электротехнике и может быть использовано для управления электромагнитными клапанами (ЭМК).
Известны различные способы управления ЭМК. Например, в [1] описаны способ и устройство, в котором осуществляется регулирование тока в обмотке катушки для управления работой ЭМК. Приведенные в [1] на FIG.8 и FIG.9 алгоритмы требуют для своей реализации контроля сразу трех параметров - напряжения на обмотке, тока протекающего через нее и ее сопротивления, что значительно усложняет схему управляющего устройства и предъявляет высокие требования к его вычислительным ресурсам. Кроме того, приведенные в [1] на FIG.1, 3, 5, 6 схемы вариантов построения силового каскада управления не позволяют регулировать ток в обмотке при выключении ЭМК, так как в этом состоянии схемы ток не будет протекать через датчик тока.
Для схем управления с одним силовым ключом проблема регулирования тока при выключении ЭМК может быть решена переносом датчика тока в цепь обмотки ЭМК и охвата его цепью возврата энергии, например, с использованием диода, как показано в [2] на FIG.1 и FIG.7. Подобное решение предполагает использование усилителя с высоким допустимым значением синфазного напряжения на входе и одновременно с высоким значением коэффициента подавления синфазной помехи, величина которой для схемы, приведенной в [2] на FIG. 7, в этом случае может превышать Vbat - напряжение питания ЭМК, что сильно ограничивает возможности по выбору усилителя.
Для схем управления с тремя силовыми ключами (использующими дополнительный источник форсирующего напряжения) [3] и [4] используется датчик тока, включенный относительно нулевого (общего) потенциала, что позволяет решить проблему с использованием синфазного напряжения, но не позволяет измерять ток во время отключения ЭМК.
Наиболее близким к заявляемому техническому решению являются способ управления ЭМК и устройство для его осуществления, описанные в [5]. Описанный здесь способ управления ЭМК включает измерение напряжения на ЭМК и тока через него, а также использование результатов этих измерений в качестве вспомогательного средства для управления ЭМК. Например, одно или оба измеренных значения могут использоваться для определения момента фактического включения электромагнитного клапана. Характерные изменения тока ЭМК возникающие при срабатывании и отпускании ЭМК приведены в [5] на FIG.7 и FIG.8. Однако включение измерительного резистора (Sense Resistor) (52) над нижним ключом (24) (см. схему на FIG.1 в описании [5]) предполагает использование усилителя с высоким допустимым значением синфазного напряжения на входе аналогично приведенному в [2] на FIG.7.
Задачей предполагаемого изобретения является упрощение, расширение функциональных возможностей и повышение энергоэффективности.
Решение этой задачи достигается тем, что определение момента начала движения якоря электромагнита производится при достижении локального максимума тока в обмотке электромагнита клапана при срабатывании, определение момента достижения якорем электромагнита конечного положения при отпускании производится при достижении локального максимума тока в обмотке электромагнита клапана в процессе отпускания. Причем, время включенного состояния клапана определяется как отрезок времени от момента начала движения якоря электромагнита при срабатывании до момента достижения якорем электромагнита конечного положения при отпускании. Снятие напряжения с обмотки электромагнита для обеспечения отпускания клапана производится в два этапа: сначала, после проверки достижения локального максимума тока в обмотке электромагнита клапана при срабатывании, отключают его обмотку от положительного вывода источника питания, размыкая верхний ключ и формируя цепь медленной рекуперации магнитной энергии электромагнита, при которой эта накопленная энергия выделяется в виде тепла на активном сопротивлении этой цепи, а затем отключают обмотку электромагнита от отрицательного вывода источника питания, размыкая нижний ключ и формируя цепь быстрой рекуперации магнитной энергии, при которой эта накопленная энергия возвращается в источник питания.
Такой способ управления ЭМК преимущественно может использоваться, когда необходимо включать клапан на короткое время, и предъявляются высокие требования к точности регулирования времени включенного состояния.
Проверку достижения локального максимума тока в обмотке электромагнита клапана при срабатывании осуществляют, например, путем сравнения текущего измеренного значения тока в обмотке с предыдущим и, если для трех последовательных измерений тока в обмотке текущее измеренное значение меньше предыдущего, то считают, что локальный максимум тока достигнут.
Для предлагаемого способа располагаемый диапазон регулирования времени включенного состояния находится в жестких пределах.
Минимально возможное время включенного состояния достигается, когда после достижения локального максимума тока в обмотке электромагнита клапана при срабатывании после начала движения якоря электромагнита, сразу размыкают верхний и нижний ключи в цепи питания обмотки ЭМ (отключают его обмотку от положительного и отрицательного выводов источника питания одновременно) и формируют цепь быстрой рекуперации магнитной энергии, которая обеспечивает возврат накопленной энергии в источник питания.
Максимально возможное время включенного состояния достигается, когда после достижения локального максимума тока в обмотке электромагнита клапана при срабатывании после начала движения якоря электромагнита, размыкают верхний ключ в цепи питания обмотки ЭМ (отключают его обмотку только от положительного вывода источника питания) и формируют цепь медленной рекуперации магнитной энергии электромагнита, в процессе протекания тока по которой эта накопленная энергия выделяется в виде тепла на активном сопротивлении этой цепи. При этом процесс затухания тока в обмотке ЭМ происходит существенно медленнее, чем в цепи быстрой рекуперации магнитной энергии.
Для регулирования времени включенного состояния клапана в пределах от минимально возможного до максимально возможного при использовании полумостовой схемы управления после размыкания верхнего ключа обеспечивают необходимую временную задержку, после чего размыкают нижний ключ. Такая последовательность операций позволяет достигнуть любой величины времени включенного состояния клапана в пределах от минимально возможного до максимально возможного.
Экспериментально установлено, что для ЭМК, использующего втяжной электромагнит с дисковым якорем, зависимость между временем включенного состояния ЭМК tON и задержкой Δtdelay между размыканием верхнего и нижнего ключей носит практически линейный характер и может быть описана соотношением:

где tON_min - минимальное время включенного состояния клапана, которое достигается при одновременном отключении обмотки электромагнита от положительного и отрицательного выводов источника питания (одновременном размыкании верхнего и нижнего ключей) в момент начала движения якоря электромагнита;
tON_min - максимальное время включенного состояния клапана, которое достигается при отключении обмотки электромагнита только от положительного вывода источника питания (размыкании только верхнего ключа) в момент начала движения якоря электромагнита;
Δtdelay_max - максимальная реализуемая задержка между моментом отключения обмотки электромагнита от положительного вывода источника питания (размыканием верхнего ключа) и моментом отключения обмотки электромагнита от отрицательного вывода источника питания (размыканием нижнего ключа), которая достигается тогда, когда дальнейшее увеличение задержки не влияет на время включенного состояния клапана;
Δtdelay - требуемая задержка между моментом отключения обмотки электромагнита от положительного вывода источника питания (размыканием верхнего ключа) и моментом отключения обмотки электромагнита от отрицательного вывода источника питания (размыканием нижнего ключа) для достижения необходимого времени включенного состояния клапана tON.
В этом случае управление временем включенного состояния клапана tON обеспечивают, изменяя временную задержку Δtdelay между моментом отключения обмотки электромагнита от положительного вывода источника питания (размыканием верхнего ключа) и моментом отключения обмотки электромагнита от отрицательного вывода источника питания (размыканием нижнего ключа), при этом временная задержка определяется соотношением:

где

Обычно управление ЭМК осуществляется по сигналам, поступающим от системы верхнего уровня.
Поэтому, полученное в текущем цикле работы время включенного состояния клапана передают по запросу системе верхнего уровня.
А требуемое в следующем рабочем цикле значение времени включенного состояния клапана tON передается от системы верхнего уровня до получения команды на включение клапана.
Для решения поставленной задачи предполагаемого изобретения в устройстве для управления электромагнитным клапаном один из усилителей является инвертирующим, а второй неинвертирующим, а в качестве микроконтроллера используется микроконтроллер PIC16F1778, выводы 3 и 4 которого соединены соответственно с выходами инвертирующего и неинвертирующего усилителей. Выводы 11 и 12 микроконтроллера соединены с управляющими входами соответственно верхнего и нижнего ключей и в устройство дополнительно введены резистор, второй измерительный резистор, второй диод и приемопередатчик RS-485, связанный двунаправленной линией с системой верхнего уровня. Причем первый вывод резистора соединен с положительным выводом источника питания, а его второй вывод с катодом второго диода, анод которого соединен с входом нижнего ключа и вторым выводом электромагнита клапана. Выход нижнего ключа соединен с входом неинвертирующего усилителя и первым выводом первого измерительного резистора, второй вывод которого соединен с отрицательным выводом источника питания, с которым также соединены выводы 8 и 19 микроконтроллера и первый вывод второго измерительного резистора, второй вывод которого соединен с анодом первого диода и входом инвертирующего усилителя. Вывод 16 микроконтроллера соединен с выходом приемопередатчика RS-485, два входа которого соединены соответственно с выводами 17 и 18 микроконтроллера, вывод 15 которого соединен с дискретным выходом системы верхнего уровня. Сущность предлагаемого технического решения поясняется чертежами. Фиг. 1. Варианты протекания тока в обмотке электромагнита ЭМК при разном возможном состоянии коммутации верхнего и нижнего ключей в используемой полумостовой схеме управления.
Фиг. 2. Семейство экспериментальных переходных процессов изменения тока в обмотке ЭМ клапана в зависимости от временной задержки Δtdelay между моментом
отключения обмотки электромагнита от положительного вывода источника питания (размыканием верхнего ключа) и моментом отключения обмотки электромагнита от отрицательного вывода источника питания (размыканием нижнего ключа).
Фиг. 3. Экспериментальная зависимость времени включенного состояния ЭМК tON от временной задержки Δtdelay между моментом отключения обмотки электромагнита от положительного вывода источника питания (размыканием верхнего ключа) и моментом отключения обмотки электромагнита от отрицательного вывода источника питания (размыканием нижнего ключа).
Фиг. 4. Функциональная схема устройства для управления электромагнитным клапаном.
Фиг. 5. Пример электрической принципиальной схемы силового каскада устройства для управления электромагнитным клапаном.
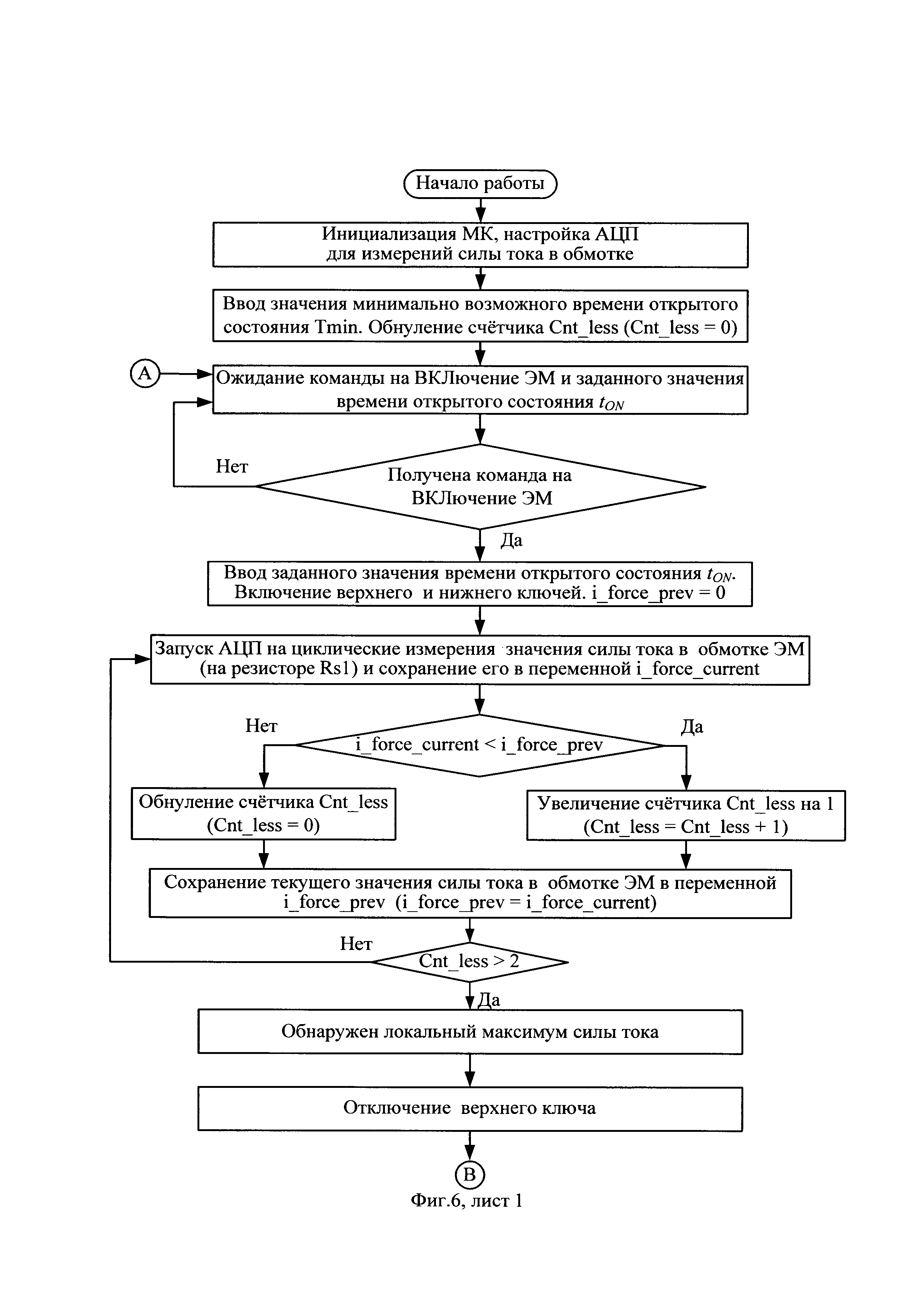
Фиг. 6. Блок-схема возможного алгоритма, реализуемого при работе устройства.
Использование полумостовой схемы управления ЭМ предполагает, что один вывод обмотки ЭМ с использованием верхнего ключа и, возможно, некоторых элементов схемы подключается к положительному выводу источника питания, а второй вывод обмотки ЭМ с использованием нижнего ключа и, возможно, некоторых других элементов схемы подключается к отрицательному выводу источника питания. На фиг. 1 представлены три возможных состояния упрощенной электрической принципиальной схемы силового каскада питания ЭМ клапана, используемые при управлении ЭМК с помощью заявляемого способа с применением полумостовой схемы управления.
На фиг. 1,а показана цепь протекания тока при замыкании обоих ключей при включении клапана и ожидании срабатывания ЭМ. Когда ток в обмотке ЭМ достигает в процессе срабатывания локального максимума, можно с уверенностью сказать, что началось движение якоря ЭМ. Ток через обмотку ЭМ течет в этом случае по цепи: положительный вывод источника питания Uп, верхний ключ S1, обмотка ЕМ, нижний ключ S2, первый измерительный резистор Rs1, отрицательный вывод источника питания 0V.
Чтобы быть уверенным, что обнаруженный локальный максимум не является результатом действия помехи и движение якоря ЭМ в направлении стопа стало необратимым, необходимо произвести проверку достижения локального максимума.
Обеспечить эту проверку при цифровой реализации способа можно, например, путем сравнения текущего измеренного значения тока в обмотке с предыдущим. Экспериментально установлено: если для трех последовательных измерений тока в обмотке текущее измеренное значение меньше предыдущего, то можно считать, что локальный максимум тока достигнут и движение якоря ЭМ при срабатывании стало необратимым.
Если необходимо обеспечить короткое время включения ЭМК, соизмеримое с величиной времени срабатывания ЭМ, то можно сразу после выполнения проверки достижения локального максимума произвести отключение питания от обмотки ЭМ клапана и начать процесс отпускания ЭМ.
Для обеспечения регулирования времени включенного состояния ЭМК с помощью заявляемого способа управления ЭМК предлагается снятие напряжения с обмотки электромагнита для обеспечения отпускания клапана производить в два этапа, используя формирование двух цепей рекуперации магнитной энергии ЭМ.
При отключении на первом этапе обмотки ЭМ от положительного вывода источника питания путем размыкания верхнего ключа формируется цепь так называемой медленной рекуперации, при которой ток, протекающий в обмотке ЭМ, замыкается по контуру (см. фиг. 1,b): обмотка ЕМ, нижний ключ S2, первый измерительный резистор Rs1, второй измерительный резистор Rs2, первый диод VD1.
Если требуется ускорить процесс отпускания ЭМ, то на втором этапе отключают обмотку ЭМ от отрицательного вывода источника питания, размыкая нижний ключ и формируя цепь быстрой рекуперации магнитной энергии. Верхний ключ оставляют разомкнутым. В этом случае накопленная энергия возвращается в источник питания, и ток протекает по цепи (см. фиг. 1,с): отрицательный вывод источника питания 0V, второй измерительный резистор Rs2, первый диод VD1, обмотка ЕМ, второй диод VD1, резистор R, положительный вывод источника питания Uп.
В результате, диапазон регулирования времени включенного состояния ЭМК определяется моментом размыкания нижнего ключа (точнее временной задержкой между размыканием верхнего ключа и размыканием нижнего), так как момент размыкания верхнего ключа при использовании предлагаемого способа всегда наступает после окончания проверки достижения локального максимума тока при срабатывании ЭМ клапана.
На фиг. 2 приведено полученное экспериментально семейство переходных процессов изменения тока в обмотке ЭМ для разных значений временной задержки между размыканием верхнего ключа и размыканием нижнего Δtdelay Максимального значения времени включенного состояния ЭМК tON_max при использовании предлагаемого способа достигают, когда в процессе отпускания нижний ключ остается замкнутым (см. на фиг. 2 переходный процесс, соответствующий Δtdelay =∞). Минимального значения времени включенного состояния ЭМК tON_min при использовании предлагаемого способа достигают, когда при отпускании верхний и нижний ключи размыкаются одновременно после окончания проверки достижения локального максимума тока при срабатывании ЭМ клапана (см. на фиг. 2 переходный процесс, соответствующий Δtdelay =0 с). Выбором значения временной задержки между
размыканием верхнего и размыканием нижнего ключей добиваются регулирования времени включенного состояния ЭМК (см. на фиг. 2 переходные процессы при значениях временной задержки Δtdelay =0,001…0,03 с).
Для лучшего понимания коммутации ключей во времени при получении каждого, представленного на фиг. 2 переходного процесса, на том же рисунке приведены временные диаграммы управляющих сигналов G1 и G2, определяющих открытое и закрытое состояние верхнего и нижнего ключей соответственно. Эти временные диаграммы показаны для всех значений временной задержки Δtdelay использованных при экспериментальных исследованиях ЭМК, имеющегося в распоряжении авторов.
Значения времени включенного состояния ЭМК tON, полученные при обработке приведенных на фиг. 2 переходных процессов, сведены в таблицу 1, где они связаны с соответствующими им значениями временной задержки Δtdelay
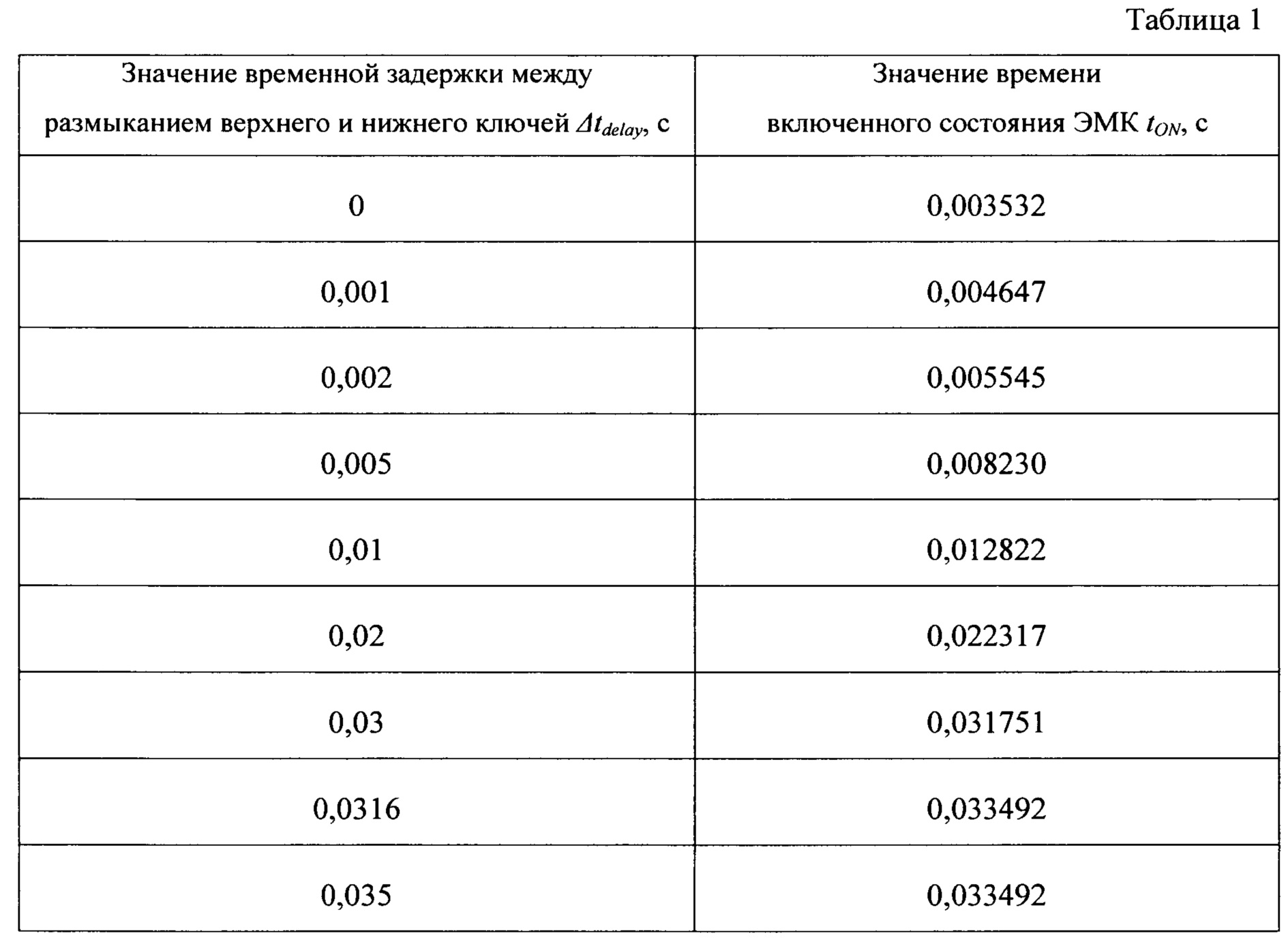
По представленным в таблице 1 данным построен график зависимости времени включенного состояния ЭМК tON от временной задержки Δtdelay, показанный на фиг. 3.
Как видно из приведенного на фиг. 3 графика, эта зависимость носит практически линейный характер и может быть аппроксимирована прямой, проходящей через точки (0; 0,003532) и (0,03; 0,31751). Первая точка соответствует минимально возможному при использовании предлагаемого способа времени включенного состояния экспериментально исследуемого ЭМК tON_min=0,003532 с, полученному при значении
временной задержки Δtdelay=0. Вторая точка tON=0,31751 с - соответствует максимальному значению экспериментально исследованной временной задержки Δtdelay =0,03 с.
Максимально достижимое при использовании заявляемого способа время включенного состояния экспериментально исследуемого ЭМК
Экспериментальная зависимость tON(Δtdelay), приведенная на графике фиг. 3, положена в основу получения соотношений (1) и (2), используемых при описании заявляемого способа. Зависимость (2) позволяет выбрать значение временной задержки Δtdelay, которое обеспечит требуемое значение времени включенного состояния ЭМК в пределах tON_max≥tON≥tON_min.
Функциональная схема устройства, реализующего предлагаемый способ с использованием микроконтроллера, приведена на фиг. 4.
Устройство для управления электромагнитным клапаном содержит источник питания (1), верхний ключ (2), нижний ключ (3), первый диод (VD1), первый измерительный резистор (RS1), микроконтроллер (4) и два усилителя (5) и (6), выходы которых соединены с соответствующими входами микроконтроллера (4), два управляющих выхода которого соединены с управляющими входами верхнего (2) и нижнего (3) ключей. Вход верхнего ключа (2) соединен с положительным выводом источника питания (1), а его выход с катодом первого диода (VD1) и первым выводом электромагнита (7) клапана. При этом, один из усилителей является инвертирующим (5), а второй неинвертирующим (6), а в качестве микроконтроллера (4) используется микроконтроллер PIC16F1778, выводы 3 и 4 которого соединены соответственно с выходами инвертирующего (5) и неинвертирующего (6) усилителей, а выводы 11 и 12 соединены с управляющими входами соответственно верхнего (2) и нижнего (3) ключей. В устройство дополнительно введены резистор (R), второй измерительный резистор (RS2), второй диод (VD2) и приемопередатчик RS-485 (8), связанный двунаправленной линией с системой верхнего уровня. Причем первый вывод резистора (R) соединен с положительным выводом источника питания (1), а его второй вывод с катодом второго диода (VD2), анод которого соединен с входом нижнего ключа (2) и вторым выводом электромагнита (7) клапана. Выход нижнего ключа (2) соединен с входом неинвертирующего усилителя (6) и первым выводом первого измерительного резистора (RS1), второй вывод которого соединен с отрицательным выводом источника питания (1), с которым также соединены выводы 8 и 19 микроконтролера (4) и первый вывод второго измерительного резистора (RS2), второй вывод которого соединен с анодом первого диода (VD1) и входом инвертирующего усилителя (5), вывод 16 микроконтроллера (4) соединен с выходом приемопередатчика RS-485 (8), два входа которого соединены соответственно с выводами 17 и 18 микроконтроллера (4), вывод 15 которого соединен с дискретным выходом системы верхнего уровня.
Силовой каскад управления ЭМК выполнен, как уже упоминалось выше, по полумостовой схеме. Величина тока, протекающего через обмотку ЭМК при срабатывании, оценивается по падению напряжения на первом измерительном резисторе (RS1). При этом достижение локального максимума тока можно определять, например, как предложено в [6].
Минимальное время открытого состояния ЭМК может быть сокращено за счет увеличения номинала резистора R (см. схему на фиг. 4). При увеличении величины сопротивления R время отпускания ЭМК сокращается, а величина импульса напряжения, возникающего на резисторе R в момент отключения нижнего ключа, увеличивается. Предложенное техническое решение позволяет регулировать время включенного состояния ЭМК, не потребляя энергию источника питания после достижения током в обмотке локального максимума, после срабатывания ЭМК.
Источник питания (1) обеспечивает силовое напряжение, необходимое для срабатывания ЭМ (7) клапана, и напряжение 5 В для питания элементов схемы.
Микроконтроллер (4) управляет работой верхнего (2) и нижнего (3) ключей и приемопередатчика RS-485 (8). Кроме того, микроконтроллер (4) обеспечивает прием сигналов управления и значения длительности включенного состояния ЭМ (7) от системы верхнего уровня и передачу по ее запросу времени включенного состояния ЭМК. Приемопередатчик RS-485 (8) преобразует логические сигналы микроконтроллера (4) в дифференциальный сигнал полудуплексной интерфейсной многоточечной линии в соответствии с требованиями стандарта [7]. В качестве приемопередатчика RS-485 (8) может быть применена микросхема SN65HVD1785 [8]. Эта микросхема предназначена для использования в качестве приемопередатчика по стандарту RS-485 и для организации полудуплексного канала связи по соответствующим стандартам. Приемопередатчик RS-485 (8) соединен с модулем универсального асинхронного приемопередатчика UART (Universal Asynchronous Receiver Transmitter) микроконтроллера (4), представляющего собой его периферийное устройство. Дополнительный сигнал управления направлением передачи (R\T) формируется программно. В качестве микроконтроллера (4) использован восьмиразрядный микроконтроллер PIC16F1778-I/SO [9].
В качестве верхнего ключа (2) в устройстве может быть использован ключ верхнего уровня AUIPS7221R [10], содержащий в своем составе драйвер MOSFET и управляемый логическим сигналом. В качестве нижнего ключа можно применить управляемый логическим уровнем транзистор IRLR2905 [11], который допускает для управления им использовать выходной сигнал микроконтроллера.
Измерение величины тока, протекающего через обмотку ЭМ (7) клапана, выполняется с помощью определения падения напряжения на измерительных резисторах RS1 и RS2. Выбор конкретного резистора для измерения величины тока в обмотке определяется состоянием нижнего ключа (3): при открытом нижнем ключе используется резистор RS1, а при закрытом - RS2. Учитывая, что ток через измерительные резисторы протекает в противоположных направлениях, усиление полученных на них падений напряжений производится неинвертирующим усилителем (6) для измерительного резистора RS1 и инвертирующим усилителем (5) - для RS2.
Возможная электрическая принципиальная схема силовой части устройства управления приведена на фиг. 5. В качестве операционного усилителя для построения схем инвертирующего и неинвертирующего усилителей можно использовать сдвоенный инструментальный усилитель MCP6V02 [12], имеющий возможность работать с напряжениями на входе и выходе близкими к нулю (Rail-to-Rail Input/Output) при однополярном питании. Для измерения низких уровней тока при определении перехода от спада тока к поиску локального минимума, в инвертирующем усилителе используется дополнительное смещение с помощью резистора R10. Коэффициенты усиления для усилителей выбираются исходя из условия использования полного рабочего диапазона АЦП при максимальном значении тока в обмотке ЭМК.
Блок-схема возможного алгоритма, реализуемого при работе устройства, приведена на фиг. 6. Этот алгоритм может быть запрограммирован и исполнен микроконтроллером при работе устройства.
Работает устройство следующим образом. При включении источника питания (1) микроконтроллер (4) выполняет инициализацию периферийных устройств и переходит к ожиданию команд от внешних устройств. До получения значения времени включенного состояния клапана, принимается значение Δtdelay =0 с, соответствующее минимальному времени включенного состояния ЭМК - tON_min. При таком значении Δtdelay при получении команды по дискретному входу «Включение ЭМ», поступающему на вывод 15 микроконтроллера (4), на его выводах 11 и 12 формируется высокий логический уровень, позволяющий включить верхний (2) и нижний (3) ключи. После чего запускаются циклические измерения АЦП (ADC) по входу AN2 (вывод 4 микроконтроллера (4)), соединенному с выходом неинвертирующего усилителя (6). При этом ток в обмотке ЭМК протекает по цепи: положительный вывод источника питания (1), верхний ключ (2), электромагнит (7), нижний ключ (3), первый измерительный резистор RS1, отрицательный вывод источника питания 0V, как показано на фиг. 1а. Для контроля величины тока в обмотке ЭМК при его срабатывании измеряют падение напряжения на первом измерительном резисторе RS1. Значение тока в обмотке ЭМ (7), полученное в данном цикле, сравнивается с предыдущим измерением этого параметра для поиска локального максимума. При этом наибольшее полученное значение сохраняется. Признак достижения током в обмотке ЭМ (7) значения локального максимума формируется при получении результата измерения тока меньше наибольшего сохраненного значения не менее трех раз подряд (см. блок-схему алгоритма на фиг. 6). По этому признаку определяется факт срабатывания ЭМК. Такое решение позволяет повысить помехозащищенность способа, и одновременно обеспечить набор скорости якорем ЭМК для обеспечения надежности его срабатывания. После определения факта срабатывания ЭМК, размыкается верхний ключ (2), запускаются таймер Т1 для определения времени отпускания ЭМК и таймер Т2 - ограничивающий отрезок времени контроля отпускания величиной 1,25 tГО (время гарантированного отпускания). Для обеспечения заданного времени включенного состояния ЭМК tON, по выражению (2) рассчитывается задержка отключения нижнего ключа (3) Δtdelay значение которой загружается в таймер Т2. При значении tON=tON_min на выводах 11 и 12 микроконтроллера (4) устанавливается напряжение низкого логического уровня, что приводит к размыканию верхнего (2) и нижнего (3) ключей. При этом ток в обмотке ЭМК протекает по цепи: отрицательный вывод источника питания 0V, второй измерительный резистор RS2, первый диод VD1, электромагнит (7), второй диод VD2, резистор R, как показано на фиг. 1 с. Для контроля величины тока в обмотке ЭМК при его отпускании измеряют падение напряжения на втором измерительном резисторе RS2. Для чего АЦП переключается на циклические измерения с входа AN1 (вывод 3 микроконтроллера (4)), к которому подключен выход инвертирующего усилителя (5). Использование инвертирующего усилителя (5) позволяет получить положительное напряжение на входе АЦП при отрицательном падении напряжения на втором измерительном резисторе RS2. Текущий результат измерения сравнивается с предыдущим для поиска сначала локального минимума тока, а затем его локального максимума. После нахождения локального максимума останавливаются таймеры Т1 и Т2, и устанавливается бит соответствующий достижению якорем ЭМ (7) конечного положения при отпускании. В случае отсутствия указанной выше последовательности минимального и максимального значений тока по срабатыванию таймера Т2 данный бит сбрасывается, формируя признак того, что отпускания ЭМ (7) (выключения ЭМК) не произошло.
Таким образом, предлагаемое техническое решение позволяет с высокой надежностью обеспечивать точное значение времени включенного состояния ЭМК, особенно когда требуется его минимизировать. Кроме того, данное решение позволяет контролировать факты срабатывания и отпускания ЭМ клапана, а также создает возможность для измерения длительностей процессов его срабатывания и отпускания. При этом снижаются требования к применяемым аппаратным средствам без снижения качества управления ЭМК и контроля его состояния Повышение энергоэффективности достигается за счет отсутствия потребления энергии источника питания практически сразу после срабатывания ЭМК и возвращения части запасенной в обмотке ЭМ при срабатывании энергии источнику питания.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. US 6249418 B1 SYSTEM FOR CONTROL OF AN ELECTROMAGNETIC ACTUATOR. Date of Patent: Jun. 19, 2001.
2. EP 0 882 303 B1 SOLENOID DRIVER AND METHOD FOR DETERMINING SOLENOID OPERATIONAL STATUS 21.04.2004 Bulletin 2004/17.
3. US 10,161,339 B2 DRIVE DEVICE FOR FUEL INJECTION. Date of Patent: Dec. 25,2018.
4. US010605190B2 INJECTION CONTROL UNIT. Date of Patent: Mar. 31, 2020.
5. US 8,681,468 B2 METHOD OF CONTROLLING SOLENOID VALVE. Date of Patent: Mar. 25, 2014.
6. RU 2717952 CI СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ. 27.03.2020. Бюл. №9.
7. ANSI TIA/EIA RS-485-A: (Recommended standard 485 Edition A) 1998 Electrical Characteristics of Generators and Receivers for Balanced Digital Multipoint Systems.
8. http://www.ti.com/lit/ds/symlink/sn65hvd 1785.pdf
9. 28/40/44-Pin, 8-Bit Flash Microcontroller www.microchip.com/product/en/
10. https//www/Infineon.com/dgdl/auisp7221t.pdf
11. https//www/Infineon.com/dgdl/irlr2905.pdf
12. 22058c.pdf www.microchip.com/product/en/MCP6V02.
Реферат
Изобретение относится к электротехнике и может быть использовано для управления электромагнитными клапанами (ЭМК). Технический результат состоит в упрощении, расширении функциональных возможностей и повышении энергоэффективности управления ЭМК. Это достигается тем, что определение момента начала движения якоря электромагнита производится при достижении локального максимума тока в обмотке электромагнита клапана при срабатывании, определение момента достижения якорем электромагнита конечного положения при отпускании производится при достижении локального максимума тока в обмотке электромагнита клапана в процессе отпускания. Причем время включенного состояния клапана определяется как отрезок времени от момента начала движения якоря электромагнита при срабатывании до момента достижения якорем электромагнита конечного положения при отпускании. Снятие напряжения с обмотки электромагнита для обеспечения отпускания клапана производится в два этапа. Сначала, после проверки достижения локального максимума тока в обмотке электромагнита клапана при срабатывании, отключают его обмотку от положительного вывода источника питания, размыкая верхний ключ и формируя цепь медленной рекуперации магнитной энергии электромагнита, при которой эта накопленная энергия выделяется в виде тепла на активном сопротивлении этой цепи. Затем отключают обмотку электромагнита от отрицательного вывода источника питания, размыкая нижний ключ и формируя цепь быстрой рекуперации магнитной энергии, при которой эта накопленная энергия возвращается в источник питания. Для реализации заявляемого способа предложена функциональная схема устройства и электрическая принципиальная схема его силового каскада. Работоспособность и эффективность предлагаемого технического решения подтверждены экспериментально. 2 н. и 6 з.п .ф-лы, 6 ил.
Формула


Документы, цитированные в отчёте о поиске
Способ определения положения якоря электромагнита и устройство для его осуществления
Комментарии