Системы, способы и устройство для совместного использования данных об изготовлении инструмента и конструктивных данных - RU2748005C2
Код документа: RU2748005C2
Чертежи
























Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[0001] Настоящей заявкой испрашивается преимущество приоритета в соответствии с параграфом 119 раздела 35 Свода законов США по Предварительной заявке на патент США №62/377,482, поданной 19 августа 2016 года, Предварительной заявке на патент США №62/509,159 поданной 21 мая 2017 года и Предварительной заявке на патент США №62/509,162 поданной 21 мая 2017 года, и они все три включены в настоящий документ посредством ссылки в полном объеме.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Пользователю может быть затруднительно вручную следовать визуальным указателям, начерченным на материале. Кроме того, может быть затруднительно устанавливать положение инструмента на материале.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0003] Устройство, системы и способы по настоящему изобретению для облегчения направления инструмента. В некоторых вариантах осуществления настоящего изобретения, система включает установку или корпус с платформой, который может быть расположен на поверхности куска материала, например, древесины. Инструмент может быть соединен с корпусом посредством электричества и механическим способом, а корпус вместе с инструментом можно перемещать над материалом. Система может включать датчики, камеры или логическую часть позиционирования для установления положения инструмента на материале и для точного перемещения (или для предоставления пользователю команд по перемещению) корпуса, платформы или инструмента на желаемую координату на материале.
[0004] Производственные операции или операции обработки могут включать обработку или использование куска материала, имеющего, по меньшей мере, одну плоскую грань, например, вырезание формы из куска многослойной фанеры. Однако инструменту может быть затруднительно устанавливать местоположение края плоской грани, который может быть прямоугольным, как в листе многослойной фанеры, или гладким контуром, например, краем двухмерного шаблона. Системы, способы и устройство по настоящему решению относятся к системе, предназначенной для определения формы и/или положения края.
[0005] Инструмент может быть выполнен посредством, по меньшей мере, одного метода для облегчения направления рабочего элемента или наконечника инструмента. Например, инструмент может включать зонд, и он может быть выполнен посредством метода бокового зондирования, который измеряет поверхность материала или заготовки, или устанавливает ориентировочную точку на заготовке или относительно нее. Инструмент может проводить зондирование, по меньшей мере, одной точки контура заготовки для оцифровки шаблона. Инструмент может проводить зондирование, по меньшей мере, одной точки контура для сканирования края рабочего материала до и после переворачивания для того, чтобы выровнять чертежи для двусторонней обработки. Инструмент может проводить зондирование, по меньшей мере, одной точки контура для генерации наложения сетки.
[0006] В некоторых вариантах осуществления настоящего изобретения, система может включать ручной инструмент, соединенный с цифровым процессором. Ручной инструмент может включать физический элемент, например, зонд, обладающий известными или практически известными геометрическими параметрами. Зонд может представлять собой часть инструмента, используемого в ином качестве, помимо проведения зондирования, дополнительно к функции зонда, например, буровой наконечник. Используя, по меньшей мере, один датчик, система может устанавливать трехмерное положение или местоположение зонда в корпусе с произвольной системой координат и сохранять положение. Система может устанавливать положение, определив положение корпуса инструмента и используя смещение от корпуса инструмента к зонду, или система может непосредственно определять положение.
[0007] В некоторых вариантах осуществления настоящего изобретения, система может определять край материала, перемещая ручной инструмент в положение, в котором геометрические параметры зонда находится в контакте с краем. Система может принимать индикацию о том, что геометрические параметры зонда находятся в контакте с краем материала. Индикация может поступать посредством интерфейса инструмента, например, кнопки, или система может автоматически определять, что зонд находится в контакте с краем. Система может хранить точку контакта в блоке памяти. Система или инструмент могут отобрать, по меньшей мере, одну точку контакта или край материала. Ручной инструмент также можно перемещать по трехмерной траектории, во время которой он будет находиться в контакте с краем только в определенные, а не в какие-либо иные, диапазоны времени.
[0008] В некоторых вариантах осуществления настоящего изобретения, поверхность материала может быть отмечена маркерами местоположения, которые облегчают определение местоположения инструмента, рабочего элемента или датчика относительно поверхности материала. Маркер местоположения может быть спроектирован или выполнен таким образом, что датчик инструмента может легко, быстро и точно определить его. В некоторых вариантах осуществления настоящего изобретения, маркер местоположения может включать двоичное изображение, или он может быть сконструирован таким образом, что его можно легко преобразовать в двоичное изображение. Например, маркер местоположения может включать фидуциальный маркер, который может быть определен посредством минимальной вычислительной мощности, например, черно-белого изображения, которое может представлять собой домино.
[0009] В некоторых вариантах осуществления, настоящее изобретение относится к системе, способу или устройству, предназначенному для направления или извлечение пыли, которая может образоваться при выполнении задачи на поверхности материала. Например, когда режущий инструмент режет материал, например, древесину, то могут образовываться опилки, из-за которых инструменту может быть трудно определять маркеры, которые могут быть помещены поверхности материала. Инструмент по настоящему изобретению включает полость, в которую может быть направлена пыль, образованная путем резания материала. Например, полость может включать карман, расположенный в корпусе инструмента, и вентилятор инструмента может направлять пыль по направлению к полости. В дополнение к этому, к инструменту может быть присоединен пылесос таким образом, чтобы пыль можно было удалять через канал.
[0010] В некоторых вариантах осуществления, настоящее изобретение относится к системе, способу или устройству для установления положения инструмента относительно рабочей поверхности. Система, способ или устройство могут устанавливать изменения силы, с которой воздействует острие воздействует (например, режущий наконечник) для того, чтобы установить момент, когда острие режущего инструмента касается или прижимается к поверхности материала. Например, острие инструмента может находиться в первом положении, в котором оно не касается рабочей поверхности. Острие может постепенно перемещаться во второе положение, в котором оно касается поверхности материала. Когда острие инструмента перемещается во второе положение, то система, способ или устройство могут устанавливать изменение силы, которое может указывать на тот факт, что острие инструмента касается поверхности материала. Например, сила, воздействующая на основание инструмента, может быть меньше, потому что острие инструмента частично снимает воздействие силы на основание.
[0011] По меньшей мере, один аспект настоящего изобретения относится к системе, предназначенной для определения калибровки положения инструмента. Система может включать основание, соединенное с инструментом. Основание может находиться в контакте с рабочей поверхностью. Система может включать вычислительное устройство, имеющее, по меньшей мере, один процессор. Система может включать датчик, соединенный с возможностью связи с вычислительным устройством. Система может включать двигатель, управляемый вычислительным устройством. Вычислительное устройство может идентифицировать, посредством датчика, первое значение параметра, указывающее на величину силы, с которой участок основания воздействует на рабочую поверхность. Вычислительное устройство может отдать команду двигателю продвинуть рабочий элемент по направлению к рабочей поверхности. Вычислительное устройство может идентифицировать, посредством датчика, установленного на рабочем элементе, который контактирует с рабочей поверхностью, второе значение параметра. Вычислительное устройство может сравнивать первое значение параметра со вторым значением параметра для того, чтобы сгенерировать разницу между первым значением и вторым значением. Вычислительное устройство может устанавливать положение оси z рабочего элемента относительно рабочей поверхности, реагируя на разницу между первым значением и вторым значением, превышающую пороговое значение.
[0012] По меньшей мере, один аспект настоящего изобретения относится к способу оценки положения рабочего элемента инструмента. Способ может включать датчик, соединенный с возможностью связи с вычислительным устройством, содержащим, по меньшей мере, один процессор, который определяет первое значение параметра, указывающее на величину силы, с которой участок основания инструмента воздействует на рабочую поверхность. Способ может включать двигатель, управляемый, по меньшей мере, одним процессором инструмента, который продвигает рабочий элемент по направлению к рабочей поверхности. Основание может, по меньшей мере, частично, находиться в контакте с рабочей поверхностью. Способ может включать датчик, определяющий второе значение параметра, когда рабочий элемент входит в контакт с рабочей поверхностью. Второе значение параметра может быть меньше первого значения параметра. Способ может включать вычислительное устройство, определяющее положение оси z рабочего элемента относительно рабочей поверхности, реагируя на разницу между первым значением и вторым значением, превышающую пороговое значение.
[0013] По меньшей мере, один аспект настоящего изобретения относится к системе, предназначенной для позиционирования рабочего элемента инструмента. Система может включать основание, соединенное с инструментом. Система может включать вычислительное устройство, содержащее, по меньшей мере, один процессор. Система может включать датчик, соединенный с возможностью связи с вычислительным устройством. Система может включать двигатель, управляемый вычислительным устройством. Система может включать вычислительное устройство, выполненное с возможностью идентификации, посредством датчика, первого значения параметра, указывающего на величину силы, с которой участок основания воздействует на рабочую поверхность. Вычислительное устройство может отдать команду двигателю продвинуть рабочий элемент по направлению к рабочей поверхности. Вычислительное устройство может идентифицировать, посредством датчика, установленного на рабочем элементе, который находится в контакте с рабочей поверхностью, второе значение параметра. Вычислительное устройство может сравнивать первое значение параметра со вторым значением параметра для идентификации разницы между первым значением и вторым значением. Вычислительное устройство может устанавливать положение оси z рабочего элемента относительно рабочей поверхности на основании разницы между первым значением и вторым значением, превышающей пороговое значение.
[0014] По меньшей мере, один аспект настоящего изобретения относится к способу позиционирования рабочего элемента инструмента. Способ может включать определение, посредством датчика, соединенного с возможностью связи с вычислительным устройством, содержащим, по меньшей мере, один процессор, первого значения параметра для первого вертикального положения основания инструмента. Способ может включать продвижение, посредством двигателя, управляемого вычислительным устройством, рабочего элемента по направлению к рабочей поверхности. Способ может включать определение, посредством датчика, установленного на рабочем элементе, который находится в контакте с рабочей поверхностью, второго значения параметра, указывающего на второе вертикальное положение основания инструмента. Способ может включать сравнение, посредством вычислительного устройства, первого значения параметра со вторым значением параметра для установления изменения в вертикальном положении основания инструмента. Способ может включать установление, посредством вычислительного устройства, положения оси z рабочего элемента относительно рабочей поверхности на основании изменения в вертикальном положении основания инструмента.
[0015] По меньшей мере, один аспект настоящего изобретения относится к системе, предназначенной для позиционирования рабочего элемента инструмента. Система может включать основание, соединенное с инструментом. Система может включать вычислительное устройство, содержащее, по меньшей мере, один процессор. Система может включать, по меньшей мере, один датчик, соединенный с возможностью связи с вычислительным устройством. Система может включать, по меньшей мере, один двигатель, управляемый вычислительным устройством. Вычислительное устройство может устанавливать, посредством, по меньшей мере, одного датчика, положение оси z рабочего элемента. Вычислительное устройство может предоставлять, на основании, по меньшей мере, частично, положения рабочего элемента по оси z, информацию об управлении двигателем для управления, по меньшей мере, одним двигателем для перемещения рабочего элемента из первого местоположения во второе местоположение, информацию об инструменте, продвинутом в направлении, которое находится в пределах диапазона регулировки (например, радиус компенсации, диапазон компенсации), примыкающего к предварительно заданной траектории для рабочего элемента инструмента.
[0016] По меньшей мере, один аспект настоящего изобретения относится к системе, предназначенной для позиционирования рабочего элемента инструмента. Система может включать основание, соединенное с инструментом. Система может включать вычислительное устройство, содержащее, по меньшей мере, один процессор. Система может включать, по меньшей мере, один датчик, соединенный с возможностью связи с вычислительным устройством. Система может включать, по меньшей мере, один двигатель, управляемый вычислительным устройством. Система может включать полость инструмента для перемещения частиц материала, удаленных с рабочей поверхности рабочим элементом. Вычислительное устройство может устанавливать, на основании первой информации, полученной, по меньшей мере, посредством одного датчика, первое местоположение рабочего элемента. Вычислительное устройство может сравнивать первое местоположение рабочего элемента с предварительно заданной траекторией для установления второго местоположения для рабочего элемента инструмента, соответствующего траектории. Вычислительное устройство может предоставлять, на основании второго местоположения, информацию об управлении двигателем для управления, по меньшей мере, одним двигателем для перемещения рабочего элемента из первого местоположения во второе местоположение, информацию об инструменте, продвинутом в направлении, которое находится в пределах диапазона регулировки, примыкающего к предварительно заданной траектории для рабочего элемента инструмента, информацию о полости, выполненной с возможностью перемещения частиц материала в направлении, противоположном направлению, в котором инструмент продвигается.
[0017] Варианты осуществления настоящего изобретения включают отслеживание использования установки, имеющей, по меньшей мере, один актуатор, для перемещения адаптера для удерживания рабочего элемента. В настоящем документе описаны системы, способы и машиночитаемые носители данных, которые: принимают цифровую конструкцию из первой компьютерной системы; устанавливают желаемую траекторию для компонента установки на основании цифровой конструкции; получают информацию о положении для компонента по мере перемещения рабочего элемента относительно рабочей поверхности; и передают данные отслеживания на основании информации о местоположении во вторую компьютерную систему.
[0018] Варианты осуществления настоящего изобретения включают обеспечение возможности совместной работы с использованием установки, имеющей, по меньшей мере, один актуатор, для перемещения адаптера для удерживания рабочего элемента. В настоящем документе описаны системы, способы и машиночитаемые носители данных, которые: получают информацию, относящуюся к рабочей поверхности; передают собранную информацию в первую компьютерную систему; принимают вторую информацию из второй компьютерной системы, при этом вторая информация основана на первой информации; и устанавливают желаемую траекторию для компонента установки на основании, по меньшей мере, частично, второй информации.
[0019] Варианты осуществления настоящего изобретения включают установление информации, относящейся к рабочей поверхности, с использованием установки. В настоящем документе описаны системы, способы и машиночитаемые носители данных, которые: получают первые данные, относящиеся к рабочей поверхности, получают вторые данные, относящиеся к рабочей поверхности, когда рабочий элемент контактирует с краем рабочей поверхности; устанавливают положение компонента установки; и устанавливают местоположение края рабочей поверхности.
[0020] Варианты осуществления настоящего изобретения включают управление установкой, имеющей, по меньшей мере, один актуатор, для перемещения адаптера для удерживания рабочего элемента. В настоящем документе описаны системы, способы и машиночитаемые носители данных, которые: собирают первые данные, относящиеся к рабочей поверхности, устанавливают положение компонента установки; оценивают, по меньшей мере, одно правило запуска, используя положение компонента; и запускают, по меньшей мере, одно действие на основании оценки.
[0021] Варианты осуществления настоящего изобретения включают облегчение использования установки, имеющей, по меньшей мере, один актуатор, для перемещения адаптера для удерживания рабочего элемента. В настоящем документе описаны системы, способы и машиночитаемые носители данных, которые: захватывают изображение пленки на рабочей поверхности; устанавливают желаемую траекторию для адаптера на основании края пленки захваченного изображения; и предоставляют информацию об управлении актуатором для перемещения адаптера в первом направлении, когда пользователь осуществляет перемещение вправо во втором направлении, при этом первое направление отличается от второго направления, и желаемая траектория устанавливает перемещение адаптера.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
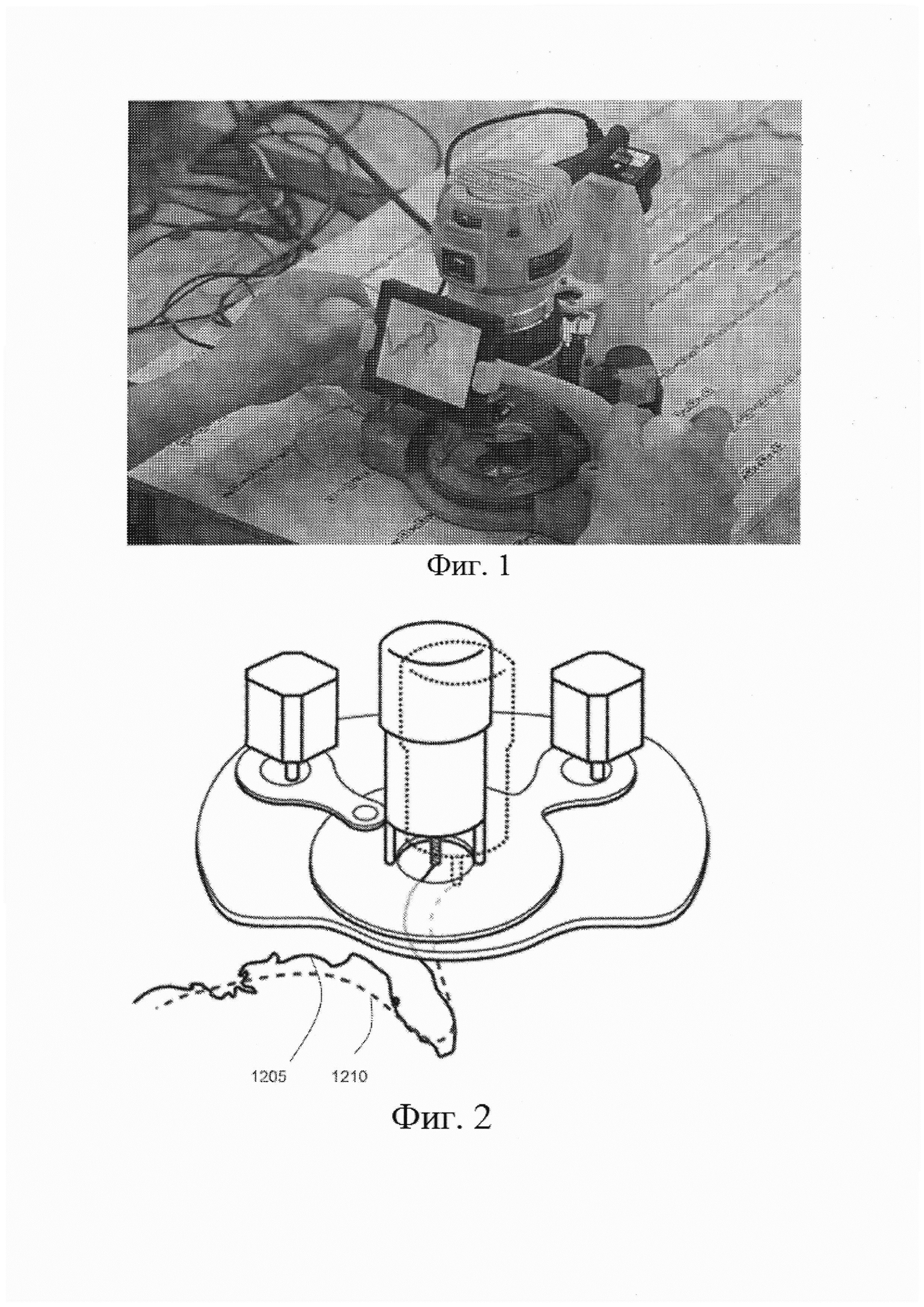
[0022] Фигура 1 представляет собой иллюстративный пример варианта осуществления устройства по настоящему изобретению для автоматически направляемых инструментов.
[0023] Фигура 2 представляет собой иллюстративный пример варианта осуществления устройства по настоящему изобретению для автоматически направляемых инструментов, перемещающихся в области целевой траектории и выполняющих задачу, в соответствии с запроектированной конструкцией.
[0024] Фигура 3 представляет собой иллюстративную блок-диаграмму варианта осуществления системы по настоящему изобретению для автоматически направляемых инструментов.
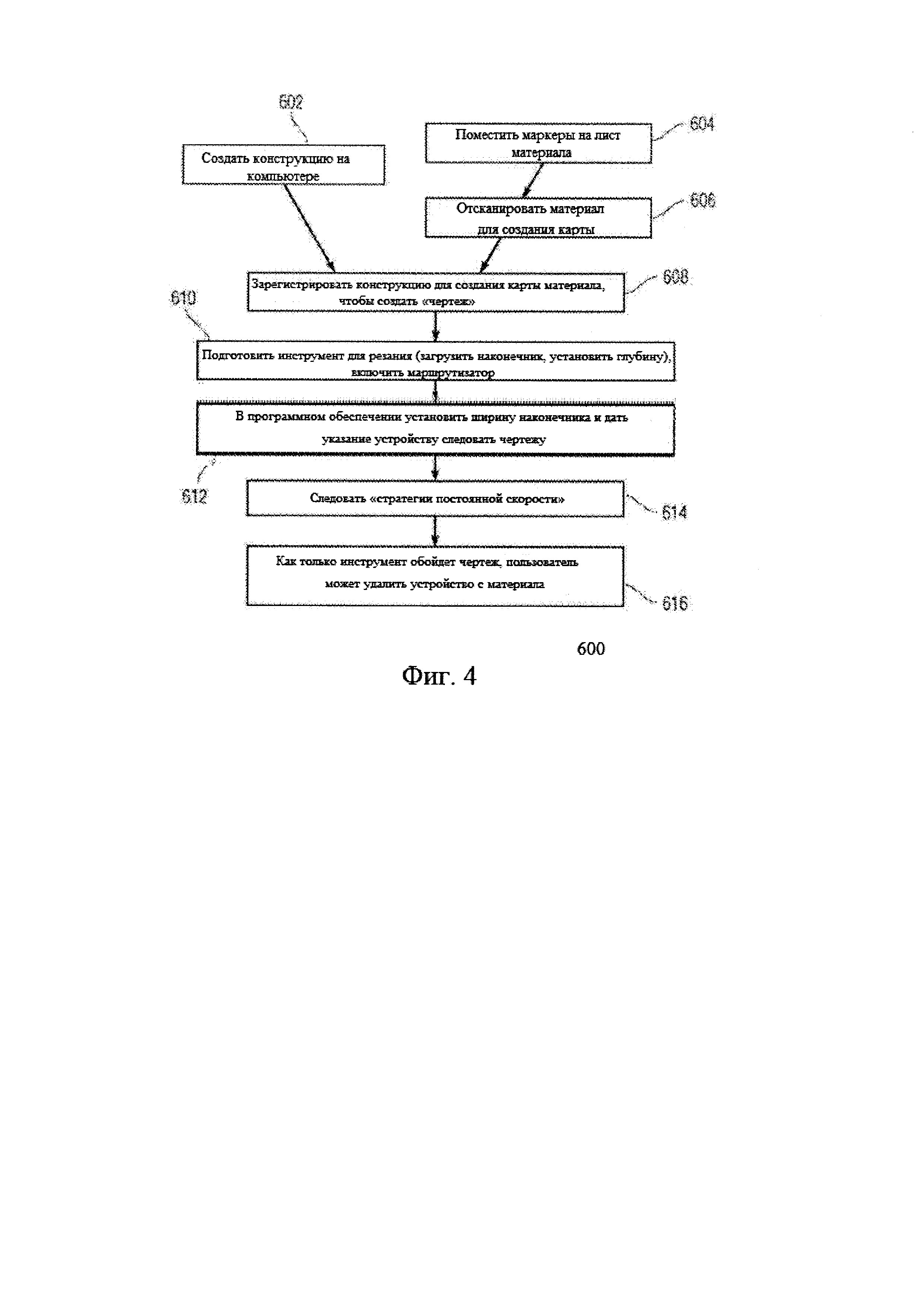
[0025] Фигура 4 представляет собой иллюстративную блок-схему варианта осуществления способа по настоящему изобретению для автоматически направляемых инструментов.
[0026] Фигура 5 представляет собой иллюстративную блок-схему варианта осуществления способа по настоящему изобретению для автоматически направляемых инструментов.
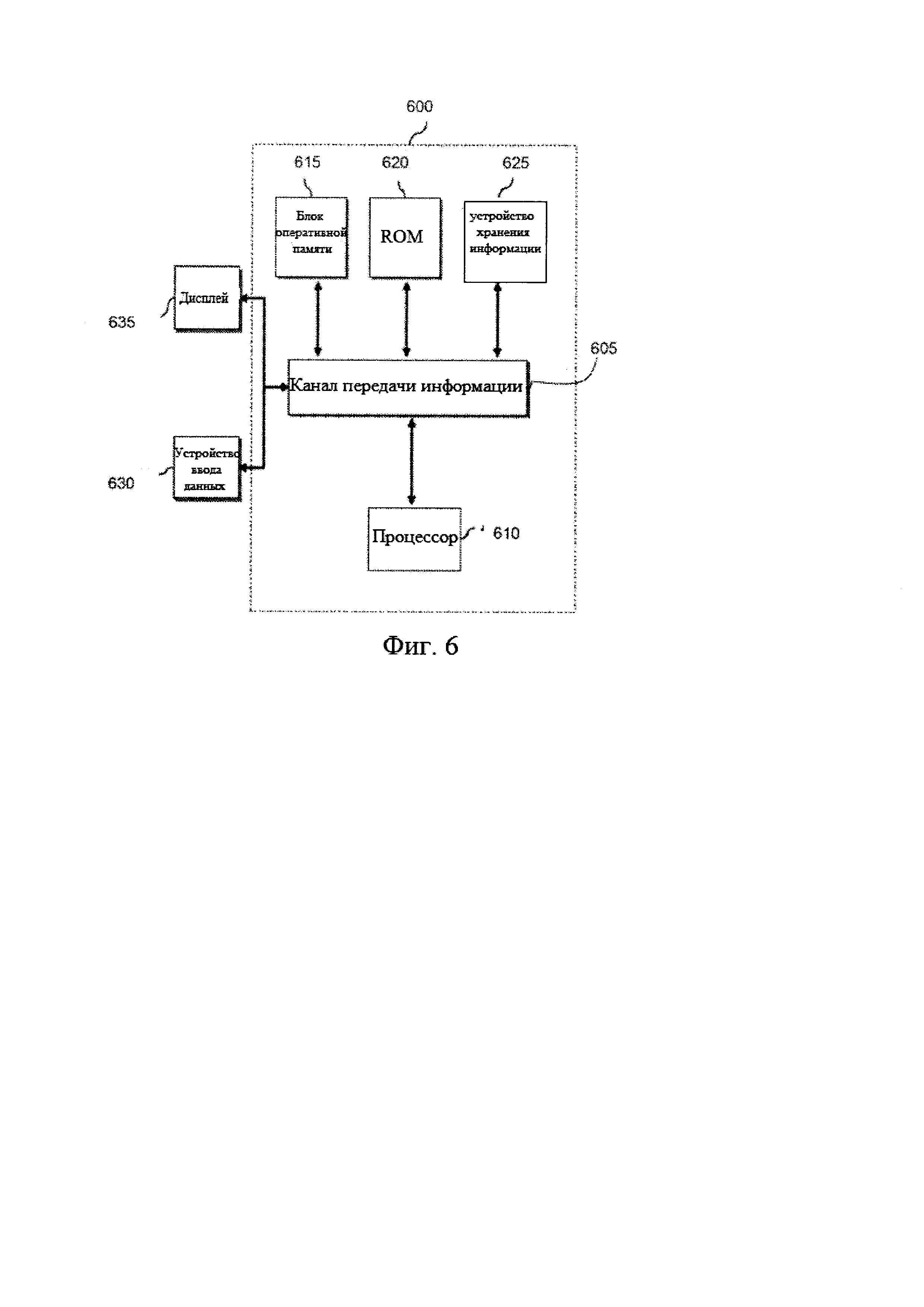
[0027] Фигура 6 представляет собой блок-диаграмму, иллюстрирующую общую архитектуру компьютерной системы, которая может использоваться для реализации различных элементов систем, устройства и способов, раскрытых в настоящем документе, в соответствии с вариантом осуществления настоящего изобретения.
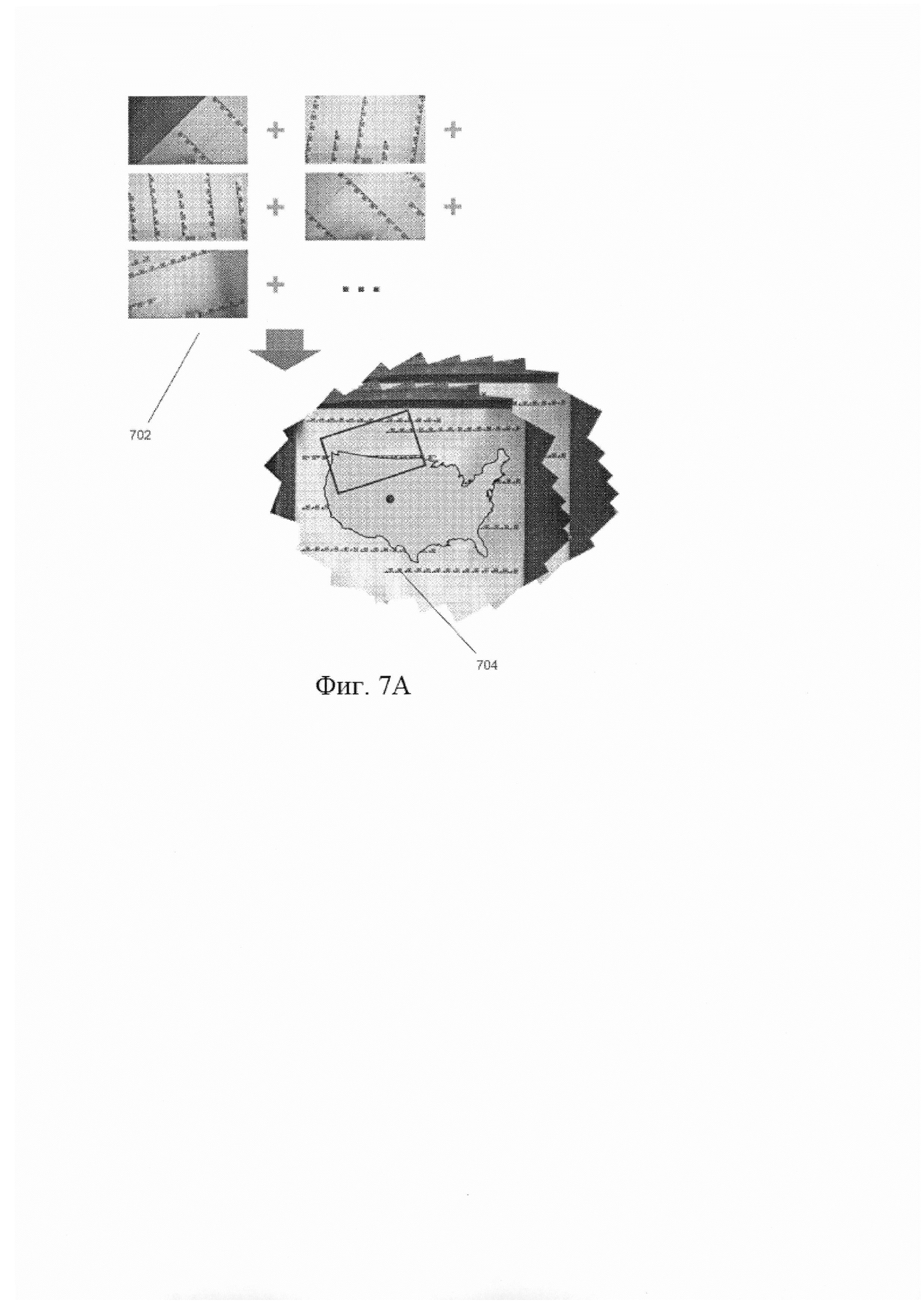
[0028] Фигуры 7А-7В представляют собой иллюстративные диаграммы маркеров местоположения, которые могут использоваться для реализации различных элементов систем, устройства и способов, раскрытых в настоящем документе, в соответствии с вариантом осуществления настоящего изобретения.
[0029] Фигуры 8А-8В представляют собой иллюстративный пример варианта осуществления устройства по настоящему изобретению для направления или извлечения частиц, которое может быть использовано для реализации различных элементов систем, устройства и способов, раскрытых в настоящем документе, в соответствии с вариантом осуществления настоящего изобретения.
[0030] Фигуры 9А-9В представляют собой иллюстративный пример вида сверху в перспективе варианта осуществления пластины основания по настоящему изобретению для направления или извлечения частиц пыли, которую можно использовать для реализации различных элементов систем, устройства и способов, раскрытых в настоящем документе, в соответствии с вариантом осуществления настоящего изобретения.
[0031] Фигура 9С представляет собой иллюстративный пример вида снизу в перспективе варианта осуществления пластины основания по настоящему изобретению для направления или извлечения частиц пыли, которую можно использовать для реализации различных элементов систем, устройства и способов, раскрытых в настоящем документе, в соответствии с вариантом осуществления настоящего изобретения.
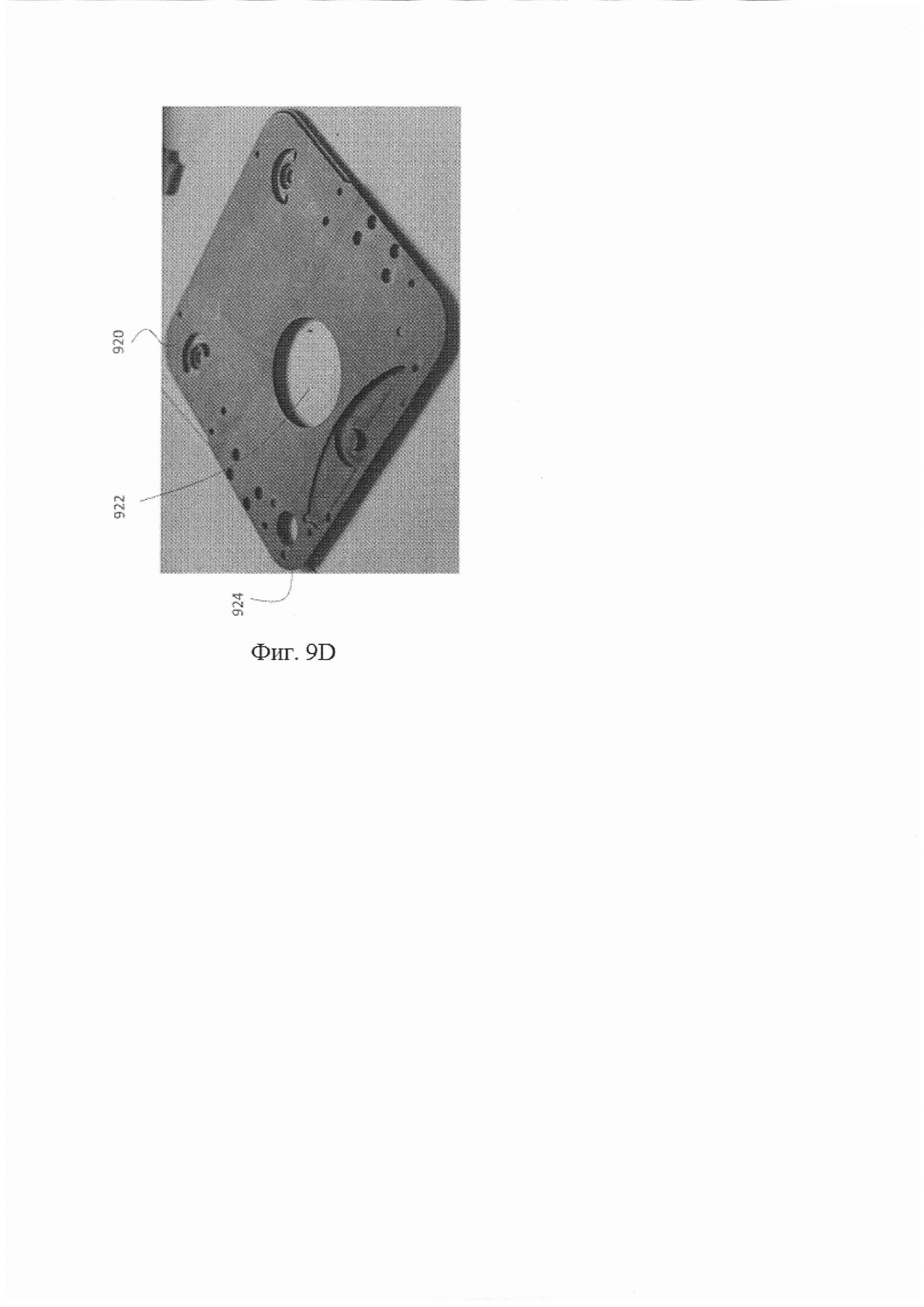
[0032] Фигура 9D представляют собой иллюстративный пример вида сверху в перспективе варианта осуществления пластины основания по настоящему изобретению для направления или извлечения частиц пыли, которую можно использовать для реализации различных элементов систем, устройства и способов, раскрытых в настоящем документе, в соответствии с вариантом осуществления настоящего изобретения.
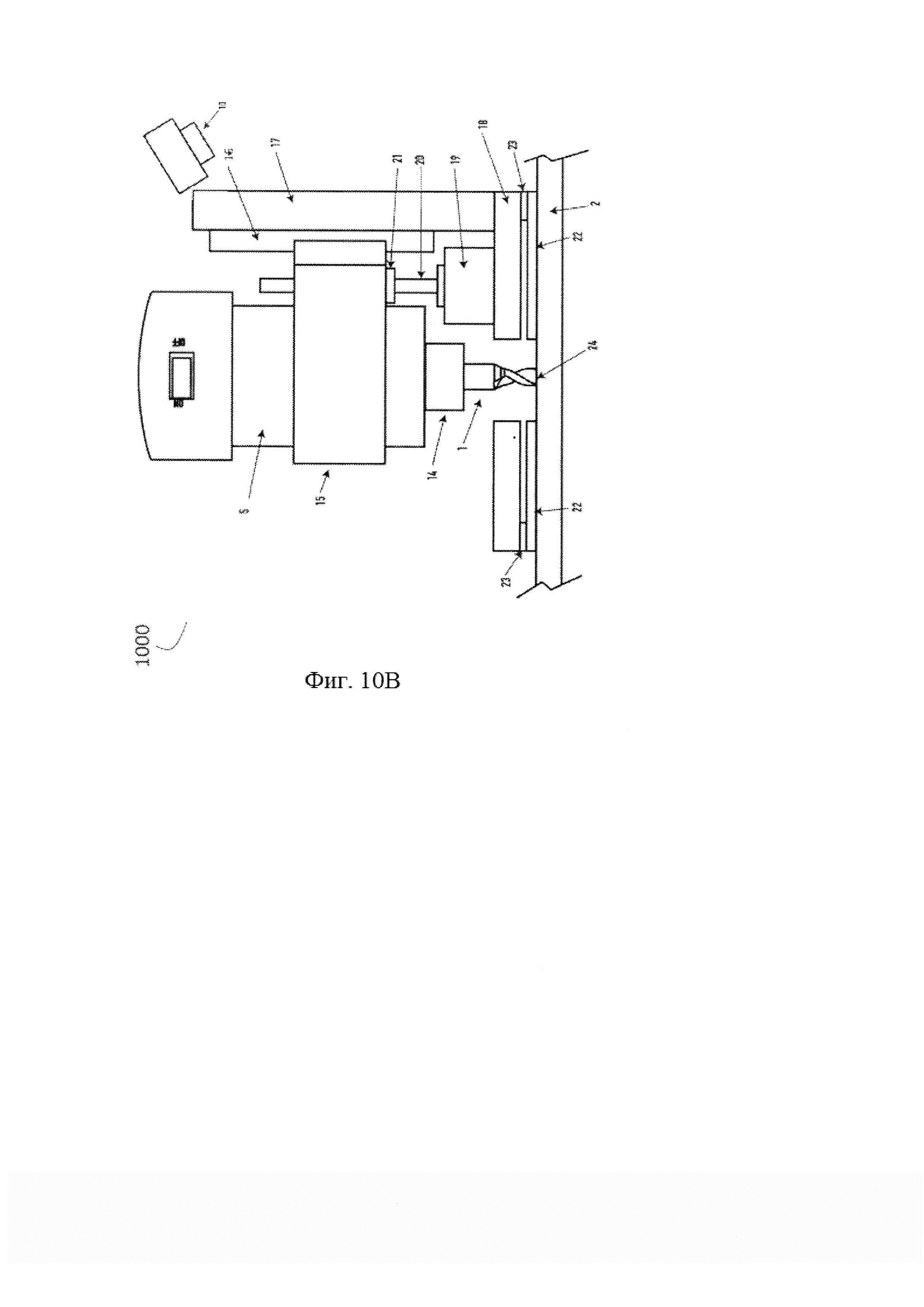
[0033] Фигуры 10А-10В представляют собой иллюстративный пример варианта осуществления системы по настоящему изобретению для установления местоположения острия инструмента, которая может быть использована для реализации различных элементов систем, устройства и способов, раскрытых в настоящем документе, в соответствии с вариантом осуществления настоящего изобретения.
[0034] Фигуры 10C-10D представляют собой иллюстративный пример варианта осуществления датчика силы, расположенного на устройстве для установления местоположения острия инструмента, который может быть использован для реализации различных элементов систем, устройства и способов, раскрытых в настоящем документе, в соответствии с вариантом осуществления настоящего изобретения.
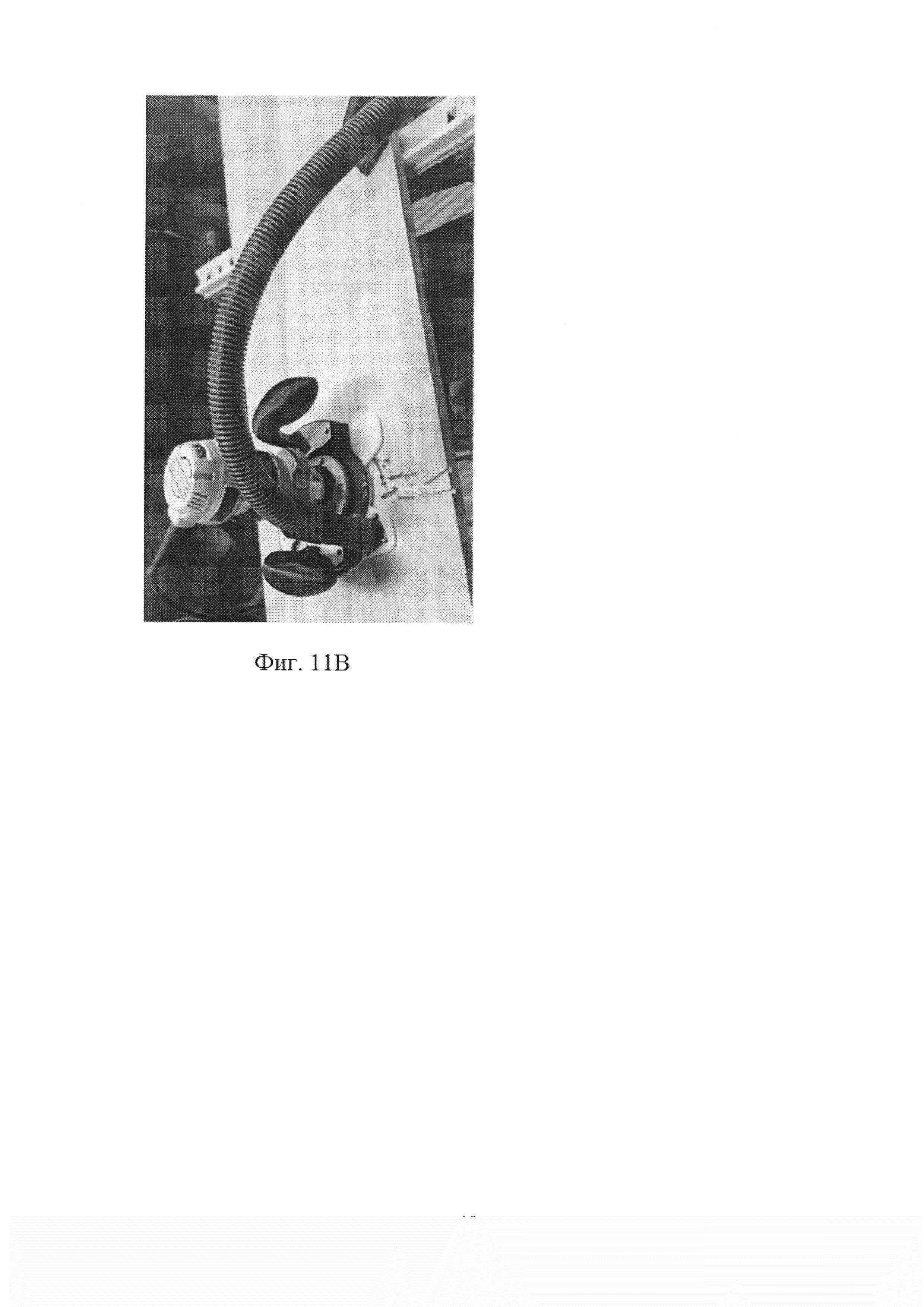
[0035] Фигуры 11А-11В представляют собой иллюстративный пример направления или извлечения частиц пыли, используя различные элементы систем, устройства и способов, раскрытых в настоящем документе, в соответствии с вариантом осуществления настоящего изобретения.
[0036] Фигура 12 представляет собой иллюстративный пример блок-диаграммы, изображающей способ позиционирования рабочего элемента инструмента, в соответствии с вариантом осуществления настоящего изобретения.
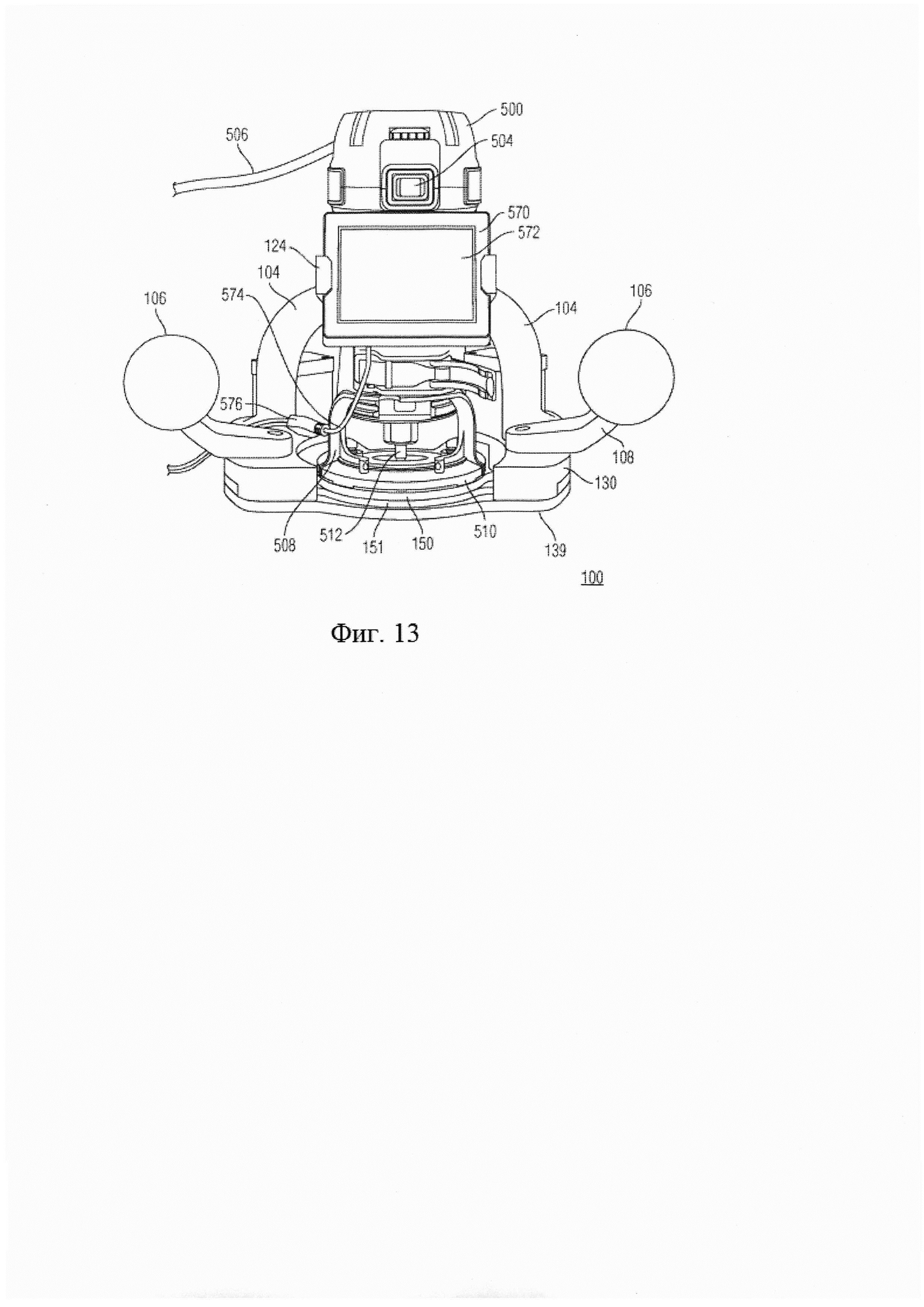
[0037] Фигура 13 изображает вид спереди инструмента, в соответствии с вариантом осуществления настоящего изобретения.
[0038] Фигура 14 изображает вид спереди инструмента без рабочего элемента, прикрепленного в соответствии с вариантом осуществления настоящего изобретения.
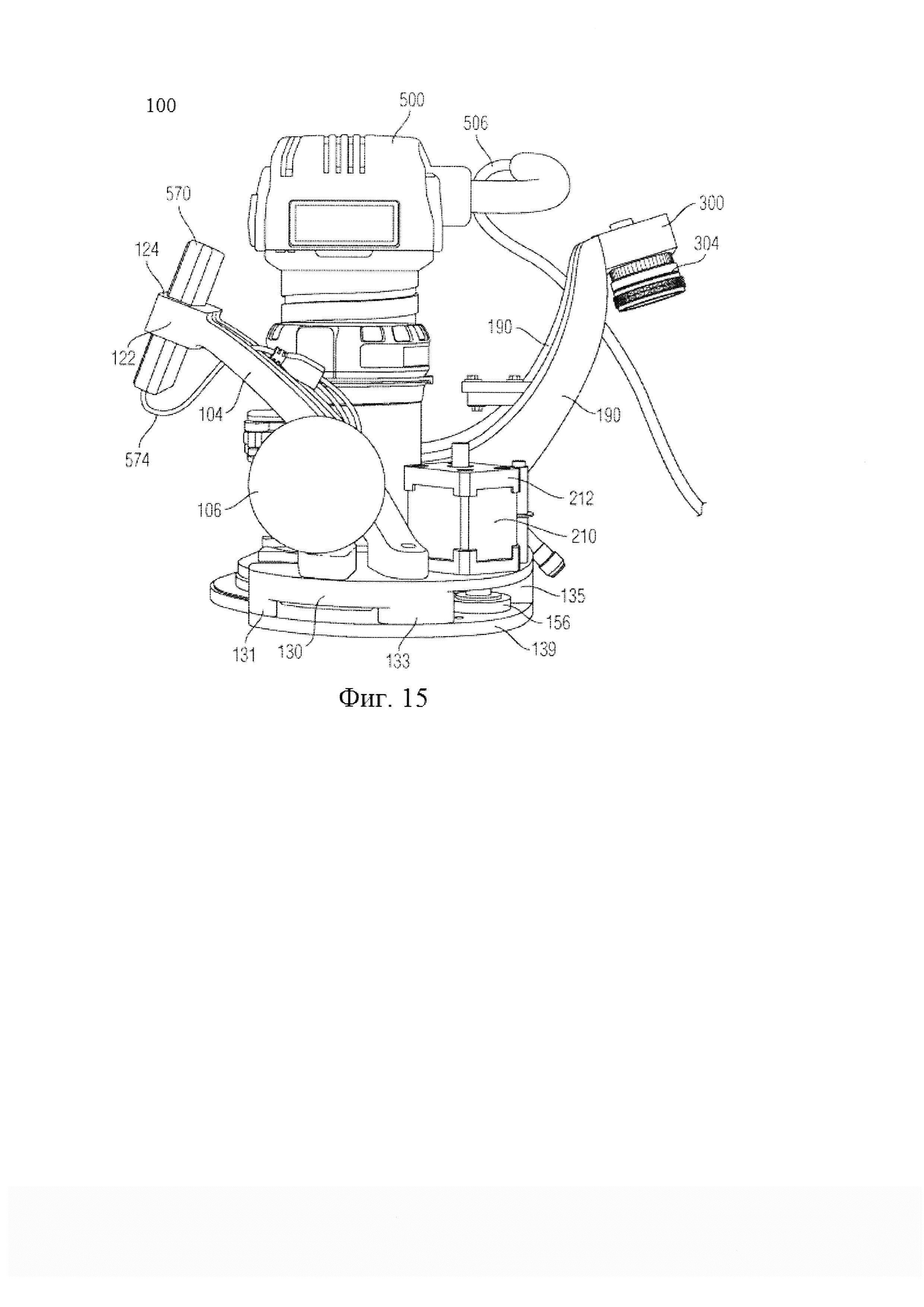
[0039] Фигура 15 предоставляет вид сбоку инструмента без рабочего элемента, прикрепленного в соответствии с вариантом осуществления настоящего изобретения.
[0040] Фигура 16 предоставляет вид сбоку инструмента без рабочего элемента, прикрепленного в соответствии с вариантом осуществления настоящего изобретения.
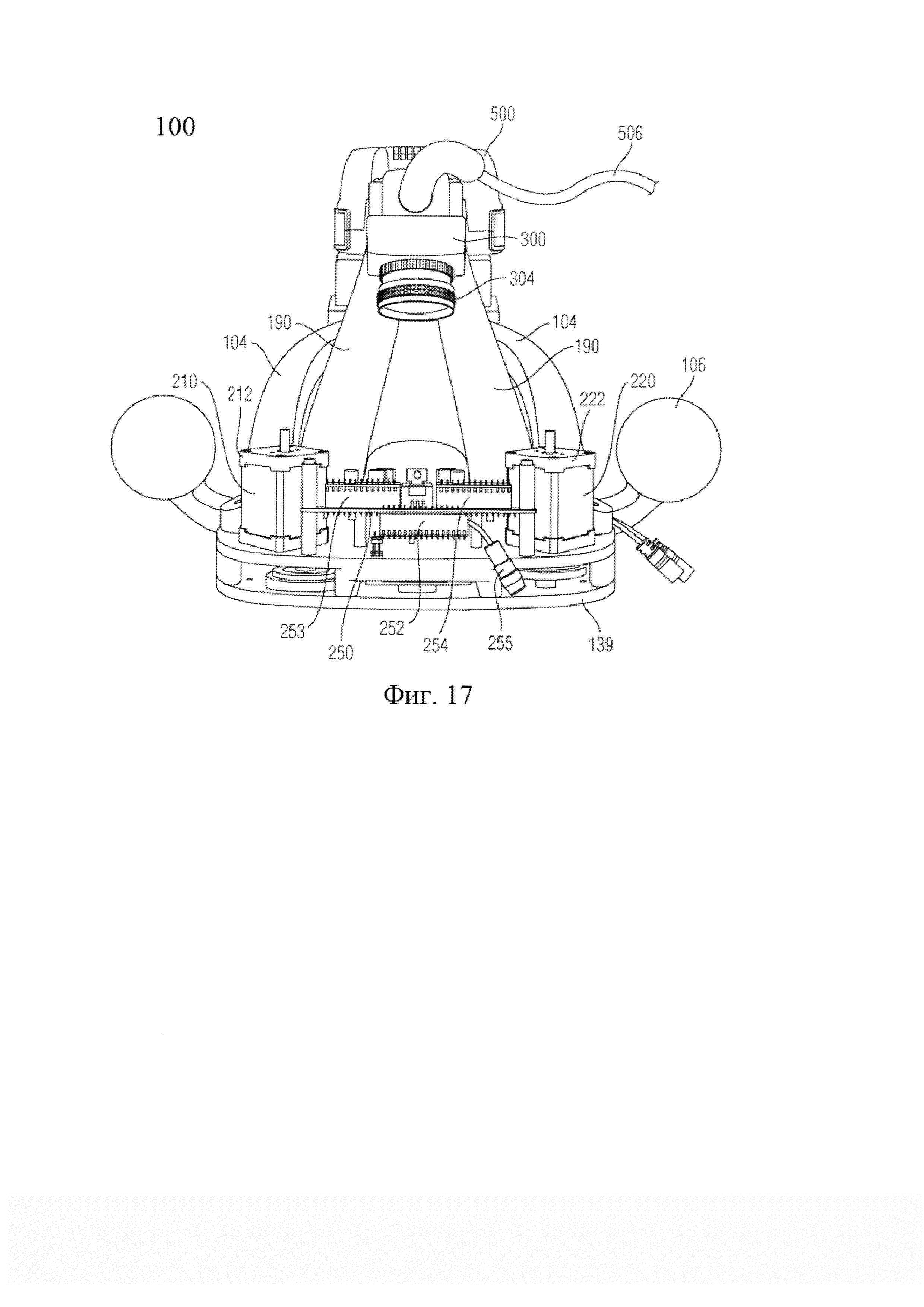
[0041] Фигура 17 предоставляет вид сзади инструмента без рабочего элемента, прикрепленного в соответствии с вариантом осуществления настоящего изобретения.
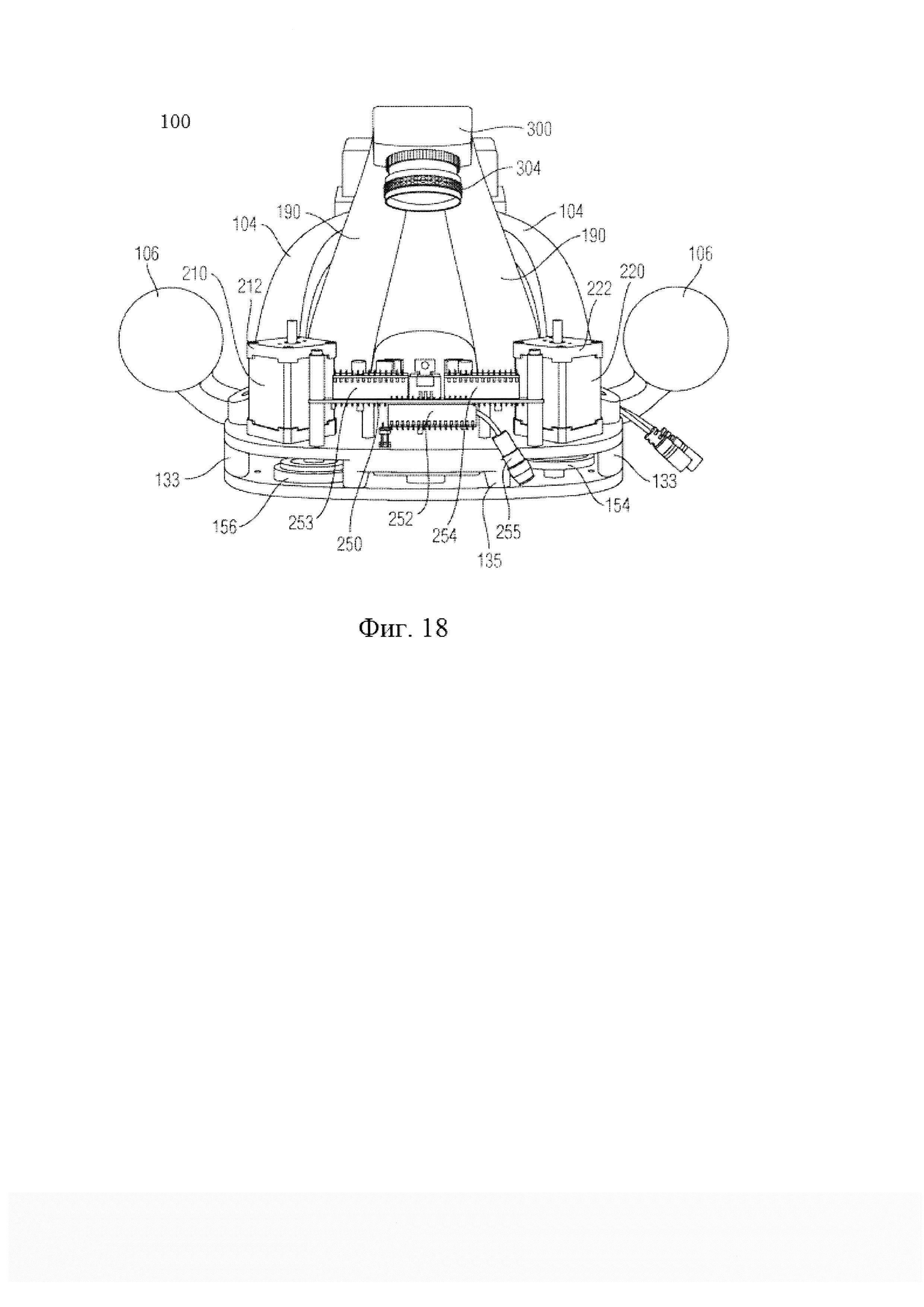
[0042] Фигура 18 предоставляет вид сзади инструмента без рабочего элемента, прикрепленного в соответствии с вариантом осуществления настоящего изобретения.
[0043] Фигура 19 предоставляет вид сверху инструмента с рабочим элементом, прикрепленным в соответствии с вариантом осуществления настоящего изобретения.
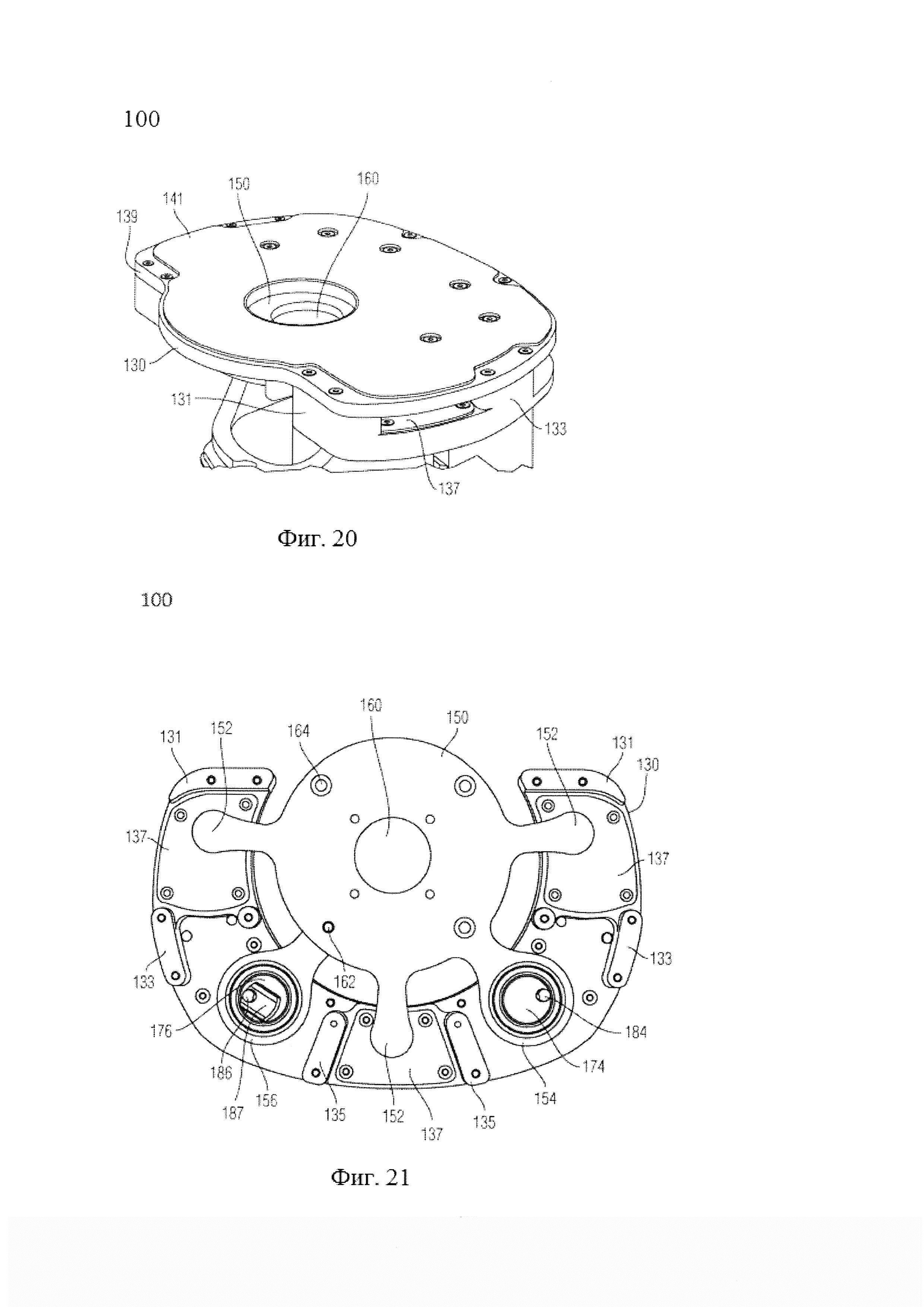
[0044] Фигура 20 предоставляет вид сверху инструмента без рабочего элемента, прикрепленного в соответствии с вариантом осуществления настоящего изобретения.
[0045] Фигура 21 предоставляет вид снизу внутренней платформы и поворотных компонентов инструмента, в соответствии с вариантом осуществления настоящего изобретения.
[0046] Фигура 22 изображает систему для направления инструмента, в соответствии с вариантом осуществления настоящего изобретения.
[0047] Фигура 23 изображает график последовательности технологических операций для направления инструмента, в соответствии с вариантом осуществления настоящего изобретения.
[0048] Фигура 24 представляет собой диаграмму, демонстрирующую определение края, в соответствии с вариантом осуществления настоящего изобретения.
[0049] Фигура 25 представляет собой диаграмму, демонстрирующую определение края, в соответствии с вариантом осуществления настоящего изобретения.
[0050] Фигура 26 представляет собой диаграмму, демонстрирующую определение края, в соответствии с вариантом осуществления настоящего изобретения.
[0051] Фигура 27 представляет собой диаграмму, демонстрирующую спиральную траекторию инструмента, сгенерированную системой, в соответствии с вариантом осуществления настоящего изобретения.
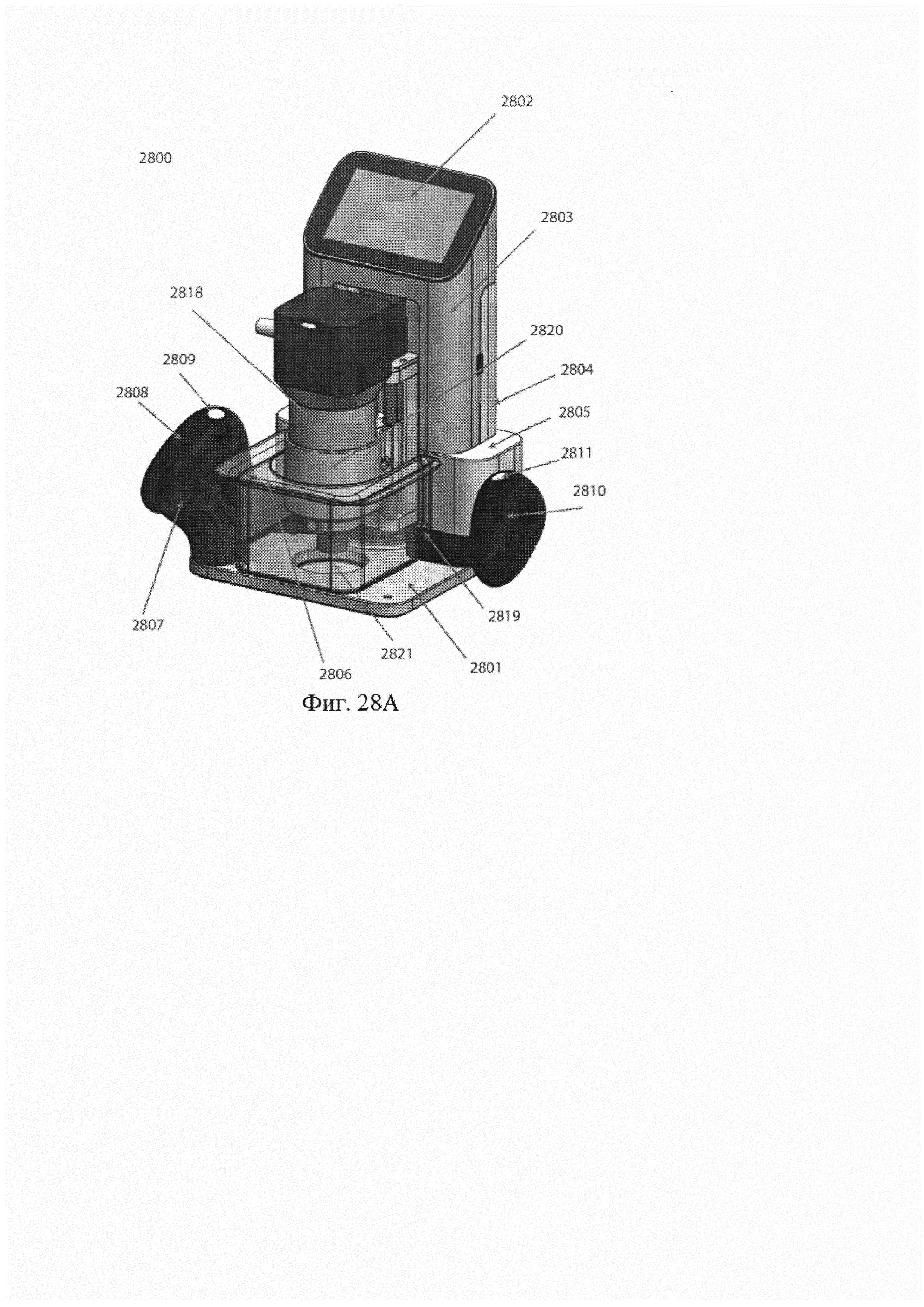
[0052] Фигуры 28A-D представляют собой диаграммы, демонстрирующие инструмент, в соответствии с вариантом осуществления настоящего изобретения.
[0053] Фигура 29 представляет собой пример журнала регистрации из системы автоматического направления и пример журнала регистрации из компьютерной системы, в соответствии с вариантом осуществления настоящего изобретения.
[0054] Фигуры 30A-30D представляют собой последовательность иллюстраций, показывающих использование пленки для определения шаблона, в соответствии с вариантом осуществления настоящего изобретения.
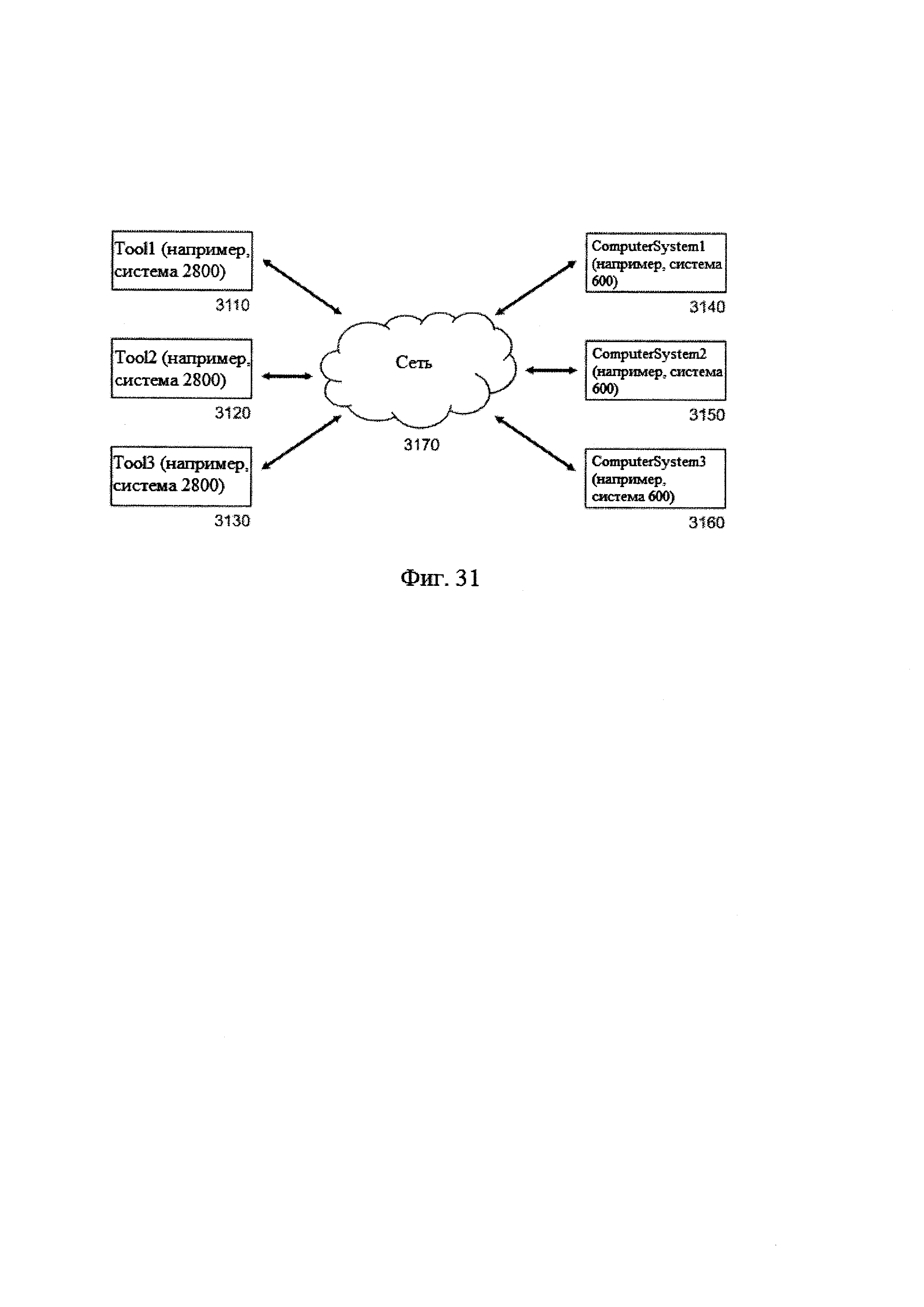
[0055] Фигура 31 представляет собой пример схематического изображения связности сети 6 компьютерных систем, в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0056] Настоящее изобретение, в целом, относится к системам и способам, предназначенным для обработки поверхности, например, такой, которая применяется в деревообработке или печати. В некоторых вариантах осуществления, настоящее изобретение относится к установлению местоположения инструмента со ссылкой на поверхность материала и к использованию местоположения для направления, корректировки или автокоррекции инструмента, в соответствии с предварительно заданной траекторией или конструктивным чертежом, например, такой как, траектория резания или траектория черчения. В некоторых вариантах осуществления настоящего изобретения, справочное местоположение может соответствовать конструкции или чертежу, полученному из удаленной компьютерной системы.
[0057] Производственные операции или операции обработки могут включать обработку или использование куска материала, имеющего, по меньшей мере, одну плоскую грань, например, вырезание формы из куска многослойной фанеры. Однако инструменту может быть затруднительно устанавливать местоположение края плоской грани, который может быть прямоугольным, как в листе многослойной фанеры, или гладким контуром, например, краем двухмерного шаблона. Системы, способы и устройство по настоящему решению относятся к системе, предназначенной для определения формы и/или положения края.
[0058] Инструмент может быть выполнен посредством, по меньшей мере, одного метода для облегчения направления рабочего элемента или наконечника инструмента. Например, инструмент может включать зонд, и он может быть выполнен посредством метода бокового зондирования, который измеряет поверхность материала или заготовки, или устанавливает ориентировочную точку на заготовке или относительно нее. Инструмент может проводить зондирование, по меньшей мере, одной точки контура заготовки для оцифровки шаблона. Инструмент может проводить зондирование, по меньшей мере, одной точки контура для сканирования края рабочего материала до и после переворачивания для того, чтобы выровнять чертежи для двусторонней обработки. Инструмент может проводить зондирование, по меньшей мере, одной точки контура для генерации наложения сетки.
[0059] В некоторых вариантах осуществления настоящего изобретения, система может включать ручной инструмент, соединенный с цифровым процессором. Ручной инструмент может включать физический элемент, например, зонд, обладающий известными или практически известными геометрическими параметрами. Зонд может представлять собой часть инструмента, используемого в ином качестве, помимо проведения зондирования, дополнительно к функции зонда, например, буровой наконечник. Используя, по меньшей мере, один датчик, система может устанавливать трехмерное положение или местоположение зонда в корпусе с произвольной системой координат и сохранять положение. Система может устанавливать положение, определив положение корпуса инструмента и используя смещение от корпуса инструмента к зонду, или система может непосредственно определять положение.
[0060] В некоторых случаях, настоящее изобретение может облегчать оценку положения рабочего элемента инструмента. Оценка положения рабочего элемента может включать, например, установление геометрических параметров режущего инструмента или установление геометрических параметров заготовки (например, рабочей поверхности).
[0061] Установление геометрических параметров инструмента может включать или относиться к установлению положения острия инструмента (например, рабочего элемента) относительно системы координат инструмента. Установление геометрических параметров инструмента может включать или относиться к установлению диаметра режущего инструмента. Информация о геометрических параметрах инструмента может быть использована для автоматического установления длины стружечной канавки рабочего элемента и угла резака (например, V-образный наконечник или угол спирали).
[0062] Определение геометрических параметров заготовки может включать или относиться к установлению или измерению толщины обрезаемого материала, или к созданию топографической карты поверхности путем многократного зондирования ее острием инструмента. Инструмент может определять местоположение признаков, представляющих интерес, например, отверстий на заготовке.
[0063] В настоящем изобретении может использоваться, по меньшей мере, один метод для определения положения рабочего элемента или острия инструмента относительно системы координат инструмента (например, высоты инструмента). Например, инструмент может включать острие инструмента или рабочий элемент и основание. Основание инструмента может опираться на рабочую поверхность и находиться в контакте с ней. Метод установления положения острия инструмента может включать продвижение или опускание острия инструмента на рабочую поверхность (или удобную плоскую поверхность, такую как, например, стол) при измерении веса на основании инструмента. Когда острие инструмента входит в контакт с рабочей поверхностью, то вес может быть перенесен на острие инструмента и убран с основания устройства, когда происходит дополнительное перемещение вниз режущего инструмента. Инструмент может определять такое уменьшение веса на основании с помощью датчиков веса, установленных на основании. Этот метод может предоставить повышенную точность при установлении положения острия инструмента, поскольку положение острия инструмента может быть установлено в пределах части хода инструмента, необходимого для подъема основания устройства с рабочей поверхности. В некоторых случаях, когда острие инструмента может быть слишком острым, острие инструмента может погрузиться или войти в рабочую поверхность (например, в древесину) на некоторое расстояние до момента генерации силы, достаточной для того, чтобы заставить устройство подняться. Однако, поскольку датчики веса могут быть выполнены с возможностью определения даже небольшого уменьшения нагрузки (например, 1%, 2%, 3%, 5%, 0,5%, 0,1% или 10% от силы, с которой инструмент или основание воздействует на материал до того, как острие инструмента будет контактировать с рабочей поверхностью), инструмент может определять изменение нагрузки, когда острие инструмента контактирует с рабочей поверхностью, даже если острие инструмента собирается войти, по меньшей мере, частично, в рабочую поверхность.
[0064] Кроме того, инструмент может устанавливать положение острия инструмента с помощью данного метода, не выполняя абсолютную калибровку датчиков веса, потому что инструмент может устанавливать положение на основании определения изменения силы. Следовательно, можно установить положение острия инструмента, используя недорогие и некалиброванные датчики силы. Примеры датчиков силы могут включать резисторы, чувствительные к силе, емкостные датчики силы, высокочастотные датчики или пьезорезистивные датчики.
[0065] Инструмент может определять, когда острие инструмента или работающий элемент контактирует или входит в контакт с рабочей поверхностью путем определения, обнаружения, установления или идентификации иным образом подъема основания. Подъем основания может представлять собой относительно небольшой подъем (например, уменьшение силы на датчике силы на 0,1%, 0,5%, 1%, 2%, 5%, 10%, 15%, 20% или на какой-либо иной процент, в зависимости от разрешения или степени детализации датчика силы). В некоторых случаях, инструмент может определять подъем на основании угла наклона основания (например, на угол в 1 градус, 2 градуса, 5 градусов, 10 градусов, 15 градусов, 25 градусов или на какой-либо другой угол наклона, который можно определять). Инструмент может определять угол наклона, используя камеру, визуальную информацию или инерциальный измерительный блок (ИИБ, содержащий, по меньшей мере, один акселерометр, гироскоп или магнитометр). Например, камера может определять сдвиг в захваченном изображении, соответствующий углу наклона, возникающему в результате подъема основания. Камера может сделать первый снимок или изображение до того, как инструмент приведет острие инструмента в контакт с рабочей поверхностью, а затем сделать второе изображение, когда острие инструмента войдет в контакт с рабочей поверхностью. Камера может сравнивать первое изображение со вторым изображением, чтобы определять угол наклона или различие между двумя изображениями. ИИБ может указывать на наклон, реагируя на перемещение или внезапное перемещение, вызванное подъемом основания. В некоторых вариантах осуществления настоящего изобретения, инструмент может включать датчик силы, присоединенный к опоре инструмента, для непосредственного измерения силы, воздействующей на острие режущего инструмента.
[0066] Инструмент может устанавливать или определять дополнительную информацию об инструменте, включающем острие, или о положении рабочего элемента, о диаметре или геометрических параметрах инструмента. Например, инструмент может включать датчик обнаружения по прерыванию луча (например, лазерный датчик обнаружения по прерыванию луча, инфракрасный датчик обнаружения по прерыванию луча, фотоэлектрический датчик или оптический датчик). Рабочий элемент может быть опущен на линию действия датчика, и инструмент может определять положение рабочего элемента, когда рабочий элемент прерывает луч. В некоторых случаях, ось луча может быть предварительно откалибрована относительно системы координат инструмента. Однако точно определить положение острия, используя данную методику, основанную на геометрических параметрах острия (например, если форма острия не является плоской в поперечном направлении), может быть сложно.
[0067] Инструмент может устанавливать близость острия инструмента к рабочей поверхности, используя емкостный датчик или электромагнитный датчик. Например, электромагнитный датчик может измерять или определять изменение индуктивности чувствительной катушки вблизи острия инструмента или рабочего элемента, который включает металл, путем измерения вихревых токов, индуцированных в металле.
[0068] Другой подход заключается в использовании видеокамеры, нацеленной на инструмент, для установления положения рабочего элемента или острия инструмента. Видеокамера может быть предварительно откалибрована в соответствии с системой координат инструмента для того, чтобы определять острие инструмента. В некоторых случаях, видеокамера может включать датчик линейного прибора с зарядовой связью (ПЗС) или другой датчик изображения. Для определения острия инструмента, датчик линейного ПЗС может использовать обработку в меньшем объеме, чем видеокамера.
[0069] Инструмент может измерять диаметр инструмента, используя один или все эти методы. Инструмент может циклически сдвигать острие инструмента во время измерения или установления положения острия инструмента. Сдвигая острие инструмента, инструмент может использовать единственный датчик обнаружения по прерыванию луча для определения диаметра инструмента, пропуская инструмент слева-направо через датчик. Боковое перемещение инструмента может привести к первому прерыванию, а затем к освобождению луча от препятствий для предоставления возможности измерения диаметра инструмента. Поскольку наконечники маршрутизатора могут иметь спиральные канавки, то инструмент может выполнять многочисленные измерения по длине инструмента для установления диаметра. Инструмент может устанавливать диаметр, используя вихревые токи или емкостное измерение, полученное одномерным датчиком, для того, чтобы собрать многомерную информацию о геометрических параметрах инструмента, сопоставляя данные датчика с положением инструмента. Инструмент может устанавливать дополнительную информацию об острие инструмента, например, угол наклона острия в случае V-образного режущего наконечника. Кроме того, инструмент может включать видеокамеру для определения геометрических свойств инструмента.
[0070] Инструмент может измерять геометрические параметры рабочей поверхности, сопоставляя положение острия инструмента с положением устройства на плоскости рабочей поверхности. Для реализации этого, инструмент (например, цилиндрический инструмент с коническим или сферическим острием) может сначала быть связан с системой координат инструмента, посредством определения положения острия инструмента. После того, как положение острия инструмент относительно системы координат инструмента станет известно, инструмент может быть расположен сбоку над интересующей поверхностью (например, над рабочей поверхностью) для установления вертикального положения рабочей поверхности. Вертикальное положение рабочей поверхности может относиться к углублению, полости, выемке или к вогнутому участку в куске древесины, глубина которого представляет интерес. Затем острие инструмента может быть вставлено, продвинуто, опущено, погружено, иным образом перемещено до тех пор, пока острие инструмента не войдет в контакт с нижней частью углубления. Дополнительное смещение острия инструмента за пределы верхнего участка поверхности, где острие инструмента впервые вошло в контакт с рабочей поверхностью, указывает на глубину углубления. Если бы интересовал профиль поверхности углубления, то инструмент можно было бы перемещать по углублению по множеству точек. Инструмент может определять глубину в каждом из множества точек. Инструмент может записывать как глубину, так и боковое положение инструмента (например, координаты х, у и z, где координаты х и у могут относиться к боковому положению, а координата z может относиться к глубине). Боковое перемещение может быть выполнено автоматически с использованием встроенной позиционирующей платформы, или выполнено вручную пользователем, или в комбинации и того, и другого.
[0071] Другим потенциальным применением могло бы быть нахождение центрального положения отверстий на рабочей поверхности. В устройстве может быть установлен инструмент с коническим острием. Затем инструмент можно расположить приблизительно (например, в пределах 5%, 10%, 15%, 20%, 25%, 30%, 50%, 75% или 90% диаметра отверстия) над центром отверстия, и погружать до тех пор, пока острие инструмента не войдет в контакт с окружностью отверстия. Поскольку острие инструмента может быть коническим, то острие инструмента может способствовать тому, что инструмент будет расположен над центром отверстия. Затем инструмент может установить боковое положение (например, координаты х и у), используя, например, видеосистему для определения положения отверстия.
[0072] Инструмент может определять толщину рабочей поверхности или иного куска материала. Используя установленную толщину рабочей поверхности, инструмент может автоматически устанавливать глубину резания или обновлять траектории резания, которые могут зависеть от толщины материала (например, муфтовое соединение, в котором длина пальцев должна соответствовать толщине сопряженного материала). Инструмент может устанавливать или измерять толщину подвешенного материала или помещать инструмент, или его участок над краем рабочей поверхности или материала, а затем продвигать острие инструмента до тех пор, пока он не войдет в контакт с поверхностью, поддерживающей материал. Глубина, на которую острие инструмента продвигается за пределы верхней части рабочей поверхности с тем, чтобы войти в контакт с поверхностью, поддерживающей рабочую поверхность, может указывать на толщину рабочей поверхности.
[0073] Инструмент может определять местоположение инструмента или острия инструмента относительно поверхности рабочего материала, используя маркеры местоположения, которые могут включать контуры деревьев, двоичные изображения, фидуциальные маркеры или домино. Настоящее изобретение облегчает направление и извлечение пыли с участка инструмента посредством генерирования воздушного потока, который направляет пыль через, по меньшей мере, один канал, расположенный на участке инструмента. Настоящее изобретение облегчает установление высоты острия инструмента, используя датчики силы, которые определяют уменьшение силы, когда острие инструмента касается материала.
[0074] С помощью полученной информации, инструмент может быть выполнен с возможностью направления рабочего элемента инструмента на выполнение задачи на целевом материале (например, на рабочей поверхности). В некоторых вариантах осуществления настоящего изобретения, система может автоматически направлять инструмент для выполнения задачи. Например, в некоторых вариантах осуществления, настоящее изобретение предоставляет портативную систему, которая может идентифицировать местоположение инструмента или установки, которая содержит инструмент, относительно обрабатываемого материала. В некоторых вариантах осуществления настоящего изобретения, устройство может быть не портативным; например, устройство может быть расположено на подвижной платформе, такой как платформа дистанционного управления, роботизированная платформа или подвижная платформа иного типа, которая может быть управляемой или не управляемой. Система может регулировать местоположение инструмента (или предоставлять команды для регулировки местоположения инструмента) на основании или в зависимости от текущего местоположения инструмента и желаемого местоположения, соответствующего конструктивному чертежу. В некоторых вариантах осуществления настоящего изобретения, система включает портативное устройство с рабочим инструментом, которым можно управлять вручную, которое может выполнять точную регулировку местоположения рабочего инструмента на основании пространственного местоположения для того, чтобы предоставить точную траекторию, по которой следует рабочий инструмент.
[0075] В некоторых вариантах осуществления настоящего изобретения, системы и способы, раскрытые в настоящем документе, могут включать систему определения местоположения или выполнять, по меньшей мере, один метод определения местоположения, который может точно, надежным образом или с низким значением задержки определять текущее местоположение или положение инструмента на целевом материале. Например, видеокамера или камера с пороговой обработкой изображений, соединенная с инструментом и сопутствующими схемами управления, может использоваться для сканирования поверхности материала и обработки отсканированных данных или данных отсканированного изображения для генерации цифровой карты поверхности материала до момента выполнения задачи на материале. Когда инструмент приближают к поверхности материала во время выполнения задачи на материале, камера может сделать второе изображение и сравнить второе изображение с цифровой картой, чтобы определить местоположение инструмента относительно материала.
[0076] В некоторых вариантах осуществления настоящего изобретения, могут использоваться различные методы определения положения, включая, например, интегрированные беспроводные технологии определения положения, например, радиочастотные, связи ближнего радиуса действия, Bluetooth, лазерного отслеживания и считывания или могут использоваться иные подходящие способы для установления положения инструмента и облегчения направления или регулировки положения инструмента для выполнения задачи. В некоторых вариантах осуществления настоящего изобретения, система может включать гибридную систему определения местоположения, которая использует, по меньшей мере, два метода определения местоположения для установления местоположения инструмента. Например, каждый метод определения местоположения может включать ортогональные сильные и слабые стороны, но при их комбинации, он может определять местоположение с высокой точностью и низким значением задержки. Например, первый метод определения местоположения может обладать высокой точностью, но низкой частотой (например, датчик, выполненный с возможностью получения данных один раз в секунду, который точно устанавливает положение, но имеет высокое значение задержки). Первый метод определения местоположения может быть объединен со вторым методом определения местоположения, который включает датчик, предоставляющий информацию о местоположении с высокой частотой и высокой точностью, но предоставляющий ограниченную информацию (например, датчик оптической мыши, который является высокочастотным и высокоточным, но который только предоставляет точный расчет траектории, включая направление и скорость перемещения, а не местоположение инструмента в максимально широком контексте). В иллюстративном примере, гибридная система местоположения может использовать камеру для получения изображения для точного установления положения инструмента на поверхности материала, а затем использовать датчик оптический мыши для отслеживания изменения положения до поступления следующего кадра изображения. В этом примере, второй метод определения местоположения с использованием датчика оптической мыши может не предоставлять возможность отслеживания всего местоположения, поскольку комплексная скорость для установления местоположения может со временем накапливать ошибку, или устройство может оказаться не в состоянии установить местоположение, если устройство приподнимут и опустят в иное положение.
[0077] В некоторых вариантах осуществления настоящего изобретения, для генерации карты до момента операции резания или черчения, пользователь может непрестанно перемещать поверхность материала с камерой до тех пор, пока камера не получит изображения всей, по существу всей, или участка поверхности материала, или его желаемого участка. Система может получать эти изображения и соединять их вместе для получения целостной карты. Генерирование изображения цифровой карты и определение местоположения могут включать, например, по меньшей мере, один метод обработки изображений, метод распознавания изображений, метод локализации, метод компьютерной обработки результатов визуализации. Например, система может идентифицировать то факт, что точки А и В на первом изображении соответствуют точкам С и D на втором изображении, и, соответственно, соединить два изображения. Например, на поверхности древесины система может идентифицировать различия, яркие пятна, различия в цвете, метки, фидуциальные маркеры, бинаризованные изображения или рисунок древесины, присутствующие на изображении, и сравнивать их с цифровой картой для установления местоположения. В другом примере, система может дополнительно использовать углы, стороны, световые шаблоны или иной сигнал, способный идентифицировать местоположение.
[0078] Материал может быть маркирован для облегчения создания карты поверхности материала или определения положения инструмента на материале или вблизи него. Например, поверхность материала, такого как металл или пластик, может не содержать достаточного количества идентификационных меток для точного определения местоположения. Отличительные метки или маркеры могут быть добавлены к материалу для облегчения методов определения местоположения, например, для распознавания изображений или обработки изображений. Маркеры могут включать любые материалы, чернила, ленту, свет, лазер, резьбу, гравировку, температурный градиент, невидимые чернила (например, чернила, видимые только в ультрафиолетовом или ином диапазоне длин волн света), способные облегчить метод определения местоположения. В некоторых вариантах осуществления настоящего изобретения, маркер включает ленту, которая может быть нанесена, по меньшей мере, на участок поверхности целевого материала. Лента может включать символы, такие как, например, уникальный штрих-код, конструкция, шаблон, цвета, гравировка, выпуклые бугорки или углубления. В некоторых вариантах осуществления настоящего изобретения, маркер может включать произвольную маркировку, осуществляемую пользователем на целевом материале ручкой, карандашом, чернилами, невидимыми чернилами, краской, индикаторными мелками или любым другим инструментом для маркировки или письма.
[0079] В дополнение к генерации цифрового изображения поверхности материала, в некоторых вариантах осуществления настоящего изобретения, система может идентифицировать конструктивный чертеж для резки или черчения на поверхности материала. Конструктивный чертеж может включать резание или черчение любой фигуры по желанию пользователя системы. Например, конструктивный чертеж может включать конструкцию, сделанную от руки, калькировку, фотографию, изображение, конструкцию, созданную с использованием программного обеспечения для системы автоматизированного конструирования (CAD), приобретенную стороннюю конструкцию или приобретенную стороннюю электронную конструкцию. Конструктивный чертеж может представлять собой конструкцию объекта, которую можно создать с помощью инструмента, выполняя операцию на материале, например, конструкцию стола, которая может быть вырезана, по меньшей мере, из цельного куска древесины.
[0080] Система может включать конструктивный чертеж с изображением карты или иным образом связывать конструктивный чертеж с картой поверхности материала или накладывать конструктивный чертеж на изображение карты. В некоторых вариантах осуществления настоящего изобретения, конструктивный чертеж может быть начерчен на поверхности материала до или после генерации первоначальной карты материала (например, с использованием специальной ручки, чернила которой могут быть определены системой, используя ультрафиолетовые или иные диапазоны длин волн). Если, например, поверхность материала включает конструкцию (например, конструкцию для резания или конструкцию для черчения) во время фазы генерации первоначальной карты, то система может обработать изображение для того, чтобы идентифицировать конструктивный чертеж и включить его в цифровую карту поверхности материала. Если конструкция начерчена или иным образом отмечена на поверхности материала после генерации первоначальной карты, то система может получить изображения материала с конструкцией, используя камеру для повторного сканирования или получения новых изображений материала. Если конструкция начерчена или иным образом отмечена на поверхности материала до генерации первоначальной карты, то система может идентифицировать конструкцию как конструктивный чертеж для резания или черчения, или пользователь может дать указание системе о том, что идентифицированная конструкция является конструктивным чертежом для резания или черчения.
[0081] В некоторых вариантах осуществления настоящего изобретения, цифровая конструкция может быть добавлена к цифровой карте поверхности материала без физического добавления конструкции на поверхность материала или нанесения конструкции на конкретный материал иным образом. Например, цифровая конструкция может быть сгенерирована на компьютере и может включать чертеж в формате CAD, векторный чертеж (например, в формате масштабируемой векторной графики - SVG, в формате обмена чертежами - DXF) или чертеж любого другого типа (например, в формате алгоритма сжатия неподвижного изображения, разработанного рабочей группой по стандартам цифровых видео- и мультипликационных изображений - JPEG, в формате хранения растровых изображений - BMP или в формате графического обмена - GIF). Например, используя программное обеспечение в формате CAD, пользователь может изменить изображение карты, добавив конструктивный чертеж. Любое другое подходящее программное обеспечение может использоваться для включения конструктивного чертежа в изображение карты или для связи конструктивного чертежа с картой поверхности материала иным образом (например, с данными, которые указывают местоположение конструктивного чертежа, используемого для облегчения выполнения задачи на материале). После регистрации конструкции на цифровой карте или на изображении цифровой карты, система может предоставить инструменту соответствующие данные цифровой карты или данные цифрового изображения с конструктивным чертежом. В некоторых вариантах осуществления настоящего изобретения, система может отображать изображение карты с конструкцией на устройстве отображения инструмента для облегчения пользователю выполнения задачи на материале. В некоторых вариантах осуществления настоящего изобретения, инструмент может выполнять задачу в соответствии с конструктивным чертежом без отображения конструктивного чертежа (например, инструмент может автоматически выполнить аспект задачи, или инструмент, вдруг, не включает устройство отображения).
[0082] В некоторых вариантах осуществления настоящего изобретения, цифровая конструкция может быть задана с помощью векторного чертежа (например, в файле формате масштабируемой векторной графики (SVG), файла DXF). В некоторых вариантах осуществления настоящего изобретения, конструктивными признаками могут являться траектории или базовые формы, используемые в формате SVG. В некоторых вариантах осуществления настоящего изобретения, траектория для режущего наконечника может быть сгенерирована с использованием цифровой конструкции в формате SVG, при этом траектория также использует формат SVG - включая, в некоторых вариантах осуществления настоящего изобретения, траектории или базовые формы, используемые в формате SVG.
[0083] Во время операции резания или черчения, пользователь может поместить инструмент на поверхность материала или рядом с ней. После помещения инструмента на поверхность, камера может повторно отсканировать или сделать снимок участка поверхности материала. Изображение может соответствовать участку материала, который находится в месте, отличном от режущего инструмента или инструмента для черчения. Система может устанавливать местоположение инструмента относительно поверхности материала или конструктивного чертежа, сравнивая идентификационные метки в новом изображении с идентификационными метками в изображении карты, сгенерированные до момента выполнения задачи на материале. Камера может быть установлена или иным образом соединена с инструментом таким образом, что аспект захвата изображения камеры (например, объектив) направлен на поверхность материала с фиксированным и известным вектором от режущего инструмента (например, бурового наконечника). Сфокусировав камеру по направлению в сторону от режущего инструмента, система может получить изображения, которые относительно чистые от обрезков, полученных в результате резания, что может затруднить понимание маркеров, используемых для определения местоположения.
[0084] Система может сравнивать новые изображения с цифровой картой поверхности материала, чтобы установить точное местоположение инструмента. Например, участок цифровой карты, соответствующий верхнему правом углу, может включать набор идентификационных меток. После получения нового изображения, система может определить те же самые идентификационные метки и установить, что эти метки соответствуют верхнему правому углу изображения карты. Затем система может определить, основываясь на сдвиге вектора камеры, точное положение режущего инструмента или инструмента для черчения.
[0085] В некоторых вариантах осуществления настоящего изобретения, система может отображать в режиме реального времени точное положение режущего инструмента или инструмента для черчения на устройстве отображения (например, на устройстве отображения инструмента или на удаленном устройстве отображения, соединенном с возможностью связи с системой или инструментом). Система может указывать положение на дисплее, используя «X», круга, точки, иконки или, используя любую другую индикацию для того, чтобы сигнализировать о текущем положении инструмента. В некоторых вариантах осуществления настоящего изобретения, инструмент может накладывать индикацию текущего положения на конструктивный чертеж или траекторию резания (например, предварительно заданную траекторию). В некоторых вариантах осуществления настоящего изобретения, инструмент может накладывать индикацию текущего положения на изображение карты. В некоторых вариантах осуществления настоящего изобретения, инструмент может накладывать индикацию текущего положения на изображение карты, которое включает наложение конструктивного чертежа.
[0086] В некоторых вариантах осуществления настоящего изобретения, система может включать систему позиционирования, которая регулирует или перемещает инструмент на основании определенного местоположения инструмента и конструктивного чертежа. В некоторых вариантах осуществления настоящего изобретения, система может использовать различные методы определения местоположения для определения местоположения инструмента и использовать различные методы позиционирования для перемещения или регулировки местоположения инструмента. Например, система может включать систему гибридного позиционирования, которая включает, по меньшей мере, две системы позиционирования для позиционирования инструмента. После установления местоположения инструмента и желаемого местоположения для инструмента, первая система позиционирования может быть выполнена с возможностью перемещения, регулировки или позиционирования инструмента в пределах относительно большого диапазона (например, для перемещения инструмента в любое место в рабочей области или на поверхности материала), но с относительно низкой точностью. Вторая система позиционирования может быть выполнена с возможностью перемещения, регулировки или позиционирования инструмента в пределах относительно малого диапазона (например, в радиусе 5 дюймов от текущего местоположения инструмента), но с высокой точностью. В некоторых вариантах осуществления настоящего изобретения, первая (например, грубая или неточная) система позиционирования может включать человека, позиционирующего инструмент на поверхности материала, а вторая (например, детальная или точная) система позиционирования может включать позиционирование инструмента с использованием серводвигателей, шаговых двигателей, исполнительных механизмов или эксцентриков, например. В таких вариантах осуществления настоящего изобретения, диапазон регулировки инструмента представляет собой малый диапазон. В некоторых вариантах осуществления настоящего изобретения, диапазон регулировки инструмента может представлять собой круговую область, овальную область, многоугольную форму или аналогичную форму. Первая система позиционирования может включать системы позиционирования, не управляемые человеком, например, роботизированные системы, системы дистанционного управления или устройства с поддержкой глобальной системы позиционирования (GPS).
[0087] Например, первая система позиционирования может включать механизм позиционирования дальнего радиуса действия с низкой точностью, который выполнен с возможностью перемещения, регулировки или коррекции положения инструмента на основании конструктивного чертежа. Вторая система позиционирования может включать механизм позиционирования малого радиуса действия с высокой точностью, который может перемещать, регулировать или корректировать положение инструмента в пределах максимального диапазона более точно, чем первый механизм позиционирования, основанный на конструкции. В иллюстративном и неограничивающем примере, первая система позиционирования может включать, например, максимальный диапазон, который включает диапазон всей рабочей области (например, области, содержащей поверхность материала, на которой должна быть выполнена задача) и включать точность +/-0,25 дюйма. Вторая система позиционирования может включать, например, максимальный диапазон 0,5 дюйма с точностью +/-0,01 дюйма. Максимальные диапазоны и точность первой и второй систем позиционирования могут включать другой диапазон и значения точности, которые упрощают системы и способы гибридного позиционирования. В различных вариантах осуществления настоящего изобретения, диапазон и точность могут относиться к одномерной точности (например, по оси X), двумерной точности (например, по осям X-Y) или трехмерной точности (например, по осям X-Y-Z).
[0088] Первая система позиционирования может быть менее точной и включать систему позиционирования, где максимальный диапазон является существенно большим, чем максимальный диапазон второй системы. Например, первая система позиционирования может перемещать инструмент из любого места на поверхности материала в пределах расстояния +/-0,25 дюйма от желаемого места, в то время как вторая система позиционирования может быть выполнена с возможностью перемещения инструмента на расстояние до 5 дюймов от текущего положения, но с точностью до 0,01 дюйма. В некоторых вариантах осуществления настоящего изобретения, система гибридного позиционирования может включать множество систем позиционирования, каждая из которых выполнена с возможностью точного установления местоположения и последующего позиционирования инструмента в пределах определенного диапазона расстояний, таким образом, когда системы позиционирования используются вместе, система может точно установить местоположение и положение или отрегулировать инструмент соответствующим образом. В некоторых вариантах осуществления настоящего изобретения, максимальный диапазон каждой последующей системы позиционирования может быть равен или превышать точность предыдущей системы позиционирования. В иллюстративном примере, первая система позиционирования может быть в состоянии позиционировать инструмент на поверхности материала, например, в максимальном диапазоне, соответствующем размеру поверхности материала, и с точностью +/-1 дюйм. Вторая система позиционирования может быть в состоянии позиционировать инструмент на поверхности материала в максимальном диапазоне 2 дюйма с точностью +/-0,1 дюйма. Третья система позиционирования может быть в состоянии позиционировать инструмент в любом месте в пределах максимального диапазона 0,2 дюйма с точностью +/-0,01 дюйма. Поэтому, в этом примере, используя все три системы позиционирования вместе, система гибридного позиционирования может точно позиционировать инструмент в максимальном диапазоне, который включает всю поверхность материала или рабочую область с точностью +/-0,01 дюйма.
[0089] В некоторых вариантах осуществления настоящего изобретения, система может включать автоматическую регулировку, направление или корректировку ошибок для того, чтобы облегчить выполнение задачи в соответствии с конструктивным чертежом. Система может использовать различные типы регулировочных, направляющих или корректирующих механизмов, включая, например, эксцентрики, сервомеханизмы, шаговые двигатели, замкнутые системы автоматического регулирования, петли обратной связи, актуаторы, механизмы типа гайки и болта. Например, система может включать эксцентрики или серводвигатели, соединенные с корпусом, и режущий инструмент, выполненный с возможностью регулировки положения режущего инструмента относительно корпуса. После установления текущего положения режущего инструмента, система может сравнить текущее положение с желаемым положением. Затем система может направлять инструмент в соответствии с конструктивным чертежом. В некоторых вариантах осуществления настоящего изобретения, когда система установит, что существует несоответствие между текущим положением и желаемым положением, или текущее положение, или траектория отклоняется от конструктивного чертежа, то система может отрегулировать режущий инструмент в соответствии с конструктивным чертежом. Например, система может идентифицировать траекторию резания или вектор инструмента и конструктивный чертеж, и отрегулировать режущий инструмент таким образом, что следующий разрез будет соответствовать конструктивному чертежу.
[0090] Система может использовать различные механизмы автоматической коррекции. В некоторых вариантах осуществления настоящего изобретения, система может включать эксцентрики, выполненные с возможностью регулировки положения режущего инструмента. Например, с помощью двух эксцентриков система может отрегулировать положение режущего инструмента в двух измерениях. Эксцентрики могут включать любой круговой виджет, вращающийся асимметрично вокруг оси. Например, эксцентрик может включать круг, вращающийся вокруг асимметричной оси. Эксцентрики могут быть соединены с режущим инструментом и корпусом, и они могут быть выполнены с возможностью регулировки положения режущего инструмента относительно корпуса, в результате чего можно регулировать положение режущего инструмента относительно поверхности материала. В некоторых вариантах осуществления настоящего изобретения, система может использовать винт с гайкой для изменения вращательного перемещения на линейное смещение для того, чтобы скорректировать или отрегулировать позиционирование инструмента.
[0091] В некоторых вариантах осуществления настоящего изобретения, система может включать управление ориентацией на основании типа режущего инструмента. Например, если режущий инструмент представляет собой ножовочную пилу, которую нельзя отрегулировать перпендикулярно, то система может отрегулировать ориентацию или угол ножовочной пилы в соответствии с конструктивным чертежом. Эта система может включать актуаторы, выполненные с возможностью регулировки угла наклона или угла пилы.
[0092] Система может управлять осью Z режущего инструмента или инструмента для черчения. Система может определять положение острия режущего инструмента относительно рабочей поверхности. Управляя осью z (например, осью, которая, по существу, ортогональна поверхности материала; осью, которая является вертикальной; осью, которая параллельна оси, вдоль которой рабочий элемент опускают или поднимают по направлению к или от поверхности рабочего элемента или режущего инструмента) режущего инструмента или инструмента для черчения, система может запускать и останавливать резание или черчение в соответствии с конструктивным чертежом. Например, если режущий инструмент находится по отношению к конструктивному чертежу на расстоянии, выходящим за пределы, допускающие корректировку (например, за пределами радиуса автоматической коррекции), то система может остановить резание, путем регулировки положения оси z режущего инструмента (например, подняв режущий наконечник или наконечник маршрутизатора с древесины). Когда пользователь возвращает режущий инструмент обратно в пределы радиуса автоматической регулировки, то система может автоматически отрегулировать положение оси Z режущего инструмента таким образом, чтобы резание началось снова (например, опускает буровой наконечник в древесину). Радиус или диапазон коррекции могут соответствовать системе позиционирования системы локализации. Например, если система локализации включает систему гибридного позиционирования, которая включает систему позиционирования большого диапазона и малого диапазона, то радиус коррекции может соответствовать системе позиционирования малого диапазона. В некоторых вариантах осуществления настоящего изобретения, управляя положением оси z инструмента, можно облегчить создание конструкций 2,5-мерного размера (псевдотрехмерного). Например, конструктивный чертеж может указывать информацию об оси z, соответствующую поверхности материала. Таким образом, система может использовать установленное положение оси z рабочего элемента или режущего инструмента, или его острия для управления двигателем с целью перемещения рабочего элемента во второе местоположение или положение (например, положение осей х, у или z).
[0093] Система может управлять двигателем для перемещения рабочего элемента в заданное положение (х, у, z) на основании информации, указанной в конструктивном чертеже. В некоторых вариантах осуществления настоящего изобретения, система может управлять, по меньшей мере, одним двигателем для перемещения рабочего элемента в заданное положение (х, у, z) на основании желаемой траектории, установленной, по меньшей мере, частично, на основании конструктивного чертежа. В некоторых вариантах осуществления настоящего изобретения, система может управлять, по меньшей мере, одним двигателем для перемещения адаптера для удержания рабочего элемента в заданном положении (х, у, z) на основании желаемой траектории, установленной, по меньшей мере, частично, на основании конструктивного чертежа. В некоторых вариантах осуществления настоящего изобретения, желаемая траектория для рабочего элемента и желаемая траектория, в которой адаптер удерживает рабочий элемент, могут быть связаны смещением между адаптером и рабочим элементом (например, смещением от острия адаптера к острию рабочего элемента). Например, если бы система была аналогична обычному маршрутизатору, а адаптер и рабочий элемент были бы выровнены в осевом направлении, то желаемая траектория для адаптера и желаемая траектория для рабочего элемента были бы смещены по оси z (направление под прямым углом к рабочей поверхности).
[0094] В некоторых вариантах осуществления настоящего изобретения, система может указывать пользователю, что режущий инструмент находится на желаемой траектории (например, на предварительно заданной траектории) или в пределах диапазона коррекции, таким образом, система может корректировать положение режущего инструмента. В некоторых вариантах осуществления настоящего изобретения, система может указывать пользователю, что резание происходит не по желаемой траектории или не в пределах диапазона коррекции. Система может дополнительно указывать пользователю, что он должен скорректировать положение режущего инструмента или направление, в котором нужно перемещать режущий инструмент для того, чтобы вывести его на желаемую траекторию или в пределы диапазона коррекции. Система может предоставить, по меньшей мере, одну визуальную индикацию посредством устройства отображения, используя светоизлучающие диоды или другие источники света, аудиосигналы, звуковые сигналы, импульсы с линейной частотной модуляцией или вибрации. В некоторых вариантах осуществления настоящего изобретения, индикация о том, что инструмент отклоняется от желаемой траектории за пределы допустимого диапазона, может включать автоматическое выключение режущего станка или регулировку оси z режущего инструмента или инструмента для черчения таким образом, что он прекращает выполнение задачи на материале. В некоторых вариантах осуществления настоящего изобретения, система может указывать желаемую траекторию на материале самой поверхности посредством, например, испускания луча света, указывающего пользователю, где находится желаемая траектория и куда двигаться. Например, после установления ошибки система может направить луч, указывающий пользователю, до какой степени нужно отрегулировать инструмент, чтобы ввести положение инструмента в диапазон автоматической коррекции или на желаемую траекторию.
[0095] В некоторых вариантах осуществления настоящего изобретения, в системе может использоваться множество режущих инструментов или инструментов для черчения, включая, например, ножовочную пилу, лобзик, маршрутизатор или бур. Система может быть выполнена с возможностью, позволяющей пользователям использовать различные аспекты настоящего изобретения с различными режущими инструментами или инструментами для черчения, не подвергая инструмент какой-либо регулировке или подвергая его незначительной/временной регулировке. Например, система может включать корпус, камеру, устройство отображения и вычислительное устройство. Корпус может быть выполнен таким образом, что режущий инструмент может быть помещен в корпус. Камера может быть соединена с корпусом, или она может быть прикреплена к режущему инструменту. После размещения камеры, систему можно подвергнуть калибровке автоматически или вручную таким образом, что система получит смещение вектора между камерой и режущим инструментом или инструментом для черчения (например, режущий наконечник или наконечник маршрутизатора).
[0096] В некоторых вариантах осуществления настоящего изобретения, система может включать автономное устройство, выполненное с возможностью выполнения функций создания карты и локализации, и указания пользователю текущего положения устройства. В некоторых вариантах осуществления настоящего изобретения, автономное устройство может быть прикреплено к режущему инструменту или инструменту черчения. В некоторых вариантах осуществления настоящего изобретения, автономное устройство может не предоставлять функциональность автоматической коррекции. В некоторых вариантах осуществления настоящего изобретения, автономное устройство может включать дисплей. В некоторых вариантах осуществления настоящего изобретения, автономное устройство может включать, по меньшей мере, один датчик (например, по меньшей мере, одну камеру для создания карты и позиционирования). В некоторых вариантах осуществления настоящего изобретения, автономное устройство может устанавливать желаемую траекторию и определять, когда инструмент находится не на желаемой траектории. Автономное устройство может указывать ошибку посредством, например, дисплея, испускающего свет на поверхность материала, аудио сигналов или речевого сопровождения.
[0097] На Фигуре 1 показан иллюстративный пример варианта осуществления устройства для направления инструментов для выполнения задачи. В некоторых вариантах осуществления настоящего изобретения, устройство включает корпус и инструмент (например, маршрутизатор в примере Фигуры 1), встроенные в корпус. Корпус может быть расположен вручную пользователем. Устройство может отрегулировать положение инструмента в корпусе для направления или регулировки инструмента в соответствии с конструктивным чертежом или скорректировать ошибку при грубом позиционировании пользователем. Устройство также может включать дисплей и быть выполнено с возможностью создания карты целевого материала и его отображения на дисплее. В некоторых вариантах осуществления настоящего изобретения, маркеры на целевом материале (например, стакеры) могут облегчать генерацию карты целевого материала, предоставляя отличительные признаки. Устройство может получить конструкцию или чертеж, загрузив его из Интернет-магазина. Устройство может отображать карту целевого материала с конструкцией, которая указывает желаемый узор для резания.
[0098] На Фигуре 2 показан иллюстративный пример того, как устройство для автоматически направляемых инструментов следует по области целевой траектории и выполняет задачи в соответствии с запроектированной конструкцией. В некоторых вариантах осуществления настоящего изобретения, для того, чтобы следовать по сложной траектории, пользователю устройства может потребоваться только переместить корпус на траекторию в грубом приближении. В этом примере, пунктирная линия показывает траекторию, по которой инструмент пойдет, если его положение не будет отрегулировано; сплошная линия представляет собой его фактическую траекторию, например, контур Юго-Восточной части Соединенных Штатов. В этом примере, пользователь может захватывать корпус и направлять инструмент, как правило, по пунктирной линии, а инструмент может саморегулироваться для выполнения разреза по сплошной линии. В некоторых вариантах осуществления настоящего изобретения, устройство автоматически регулирует буровой наконечник или другой режущий инструмент на основании положения режущего инструмента (например, по меньшей мере, одного положения оси х, положения оси у или положения оси z) и желаемого положения режущего инструмента. Ось х и ось у могут пересекаться, формируя плоскость х-у, которая, по существу, параллельна (например, в пределах 45 градусов) поверхности материала, в то время как ость z, по существу, перпендикулярна (например, перпендикулярна в пределах 45 градусов) или ортогональна горизонтальной плоскости, сформированной осью х-у. В некоторых вариантах осуществления настоящего изобретения, пользователь устройства может переместить устройство по пунктирной линии 1210, указанной на Фигуре 2 (или по траектории 406, указанной на Фигуре 23), в то время как устройство автоматически регулирует режущий инструмент (например, положение х, у или z) в соответствии с желаемым конструктивным чертежом, например, с конструктивным чертежом 1205 Фигуры 2. Например, устройство может идентифицировать или определить текущее положение режущего инструмента относительно целевой поверхности с конструкцией. Затем устройство может сравнить текущее положение с желаемым положением конструкции или карты и отрегулировать режущий инструмент. Например, если будет установлено, что рабочий элемент или острие режущего инструмента находится на 1 дюйм выше поверхности материала, то система может принять решение опустить острие режущего элемента для того, чтобы оно вошло в контакт с поверхностью материала. В другом примере, если в соответствии с конструкцией следует просверлить отверстие в материале на глубину 0,5 дюйма, то система может установить положение острия по оси z и вставить острие в материал на глубину 0,5 дюйма, основываясь на установленном положении оси z. Например, система может отдать команду двигателю продвинуть рабочий элемент или режущий инструмент на 0,5 дюйма за пределы поверхности материала.
[0099] На Фигуре 3 показана иллюстративная блок-диаграмма варианта осуществления системы по настоящему изобретению для автоматически направляемых инструментов. В некоторых вариантах осуществления настоящего изобретения, система 680 включает интеллектуальное устройство 681. Интеллектуальное устройство 681 может включать, по меньшей мере, одно центральное процессорное устройство («ЦПУ») или процессор 683 и может включать код программного обеспечения 685, который выполняет, по меньшей мере, один процесс, по меньшей мере, один блок памяти 687 или, по меньшей мере, один дисплей 689. Интеллектуальное устройство 681 может включать автономный блок, или интеллектуальное устройство 681 может включать компоненты, которые не являются автономными или раздельными. Например, дисплей 689 может быть привязан к интеллектуальному устройству 681 или интегрирован в корпус интеллектуального устройства 681. В некоторых вариантах осуществления настоящего изобретения, интеллектуальное устройство 681 может быть интегрировано в рамках системы 680, таким образом, система представляет собой автономный портативный блок. В некоторых вариантах осуществления настоящего изобретения, система 680 может включать, по меньшей мере, один интерфейс связи (не показано) для возможности связи с другими компьютерными системами посредством сети (например, для отправки и приема данных об изготовлении (например, информации, касающейся разрезов, сделанных на рабочей поверхности), для отправки и приема цифровых конструкций или конструктивных чертежей). В некоторых вариантах осуществления настоящего изобретения, система 680 может включать, по меньшей мере, один другой интерфейс (не показано, например, входной интерфейс).
[00100] В некоторых вариантах осуществления настоящего изобретения, устройство может включать двигатели (например, 210, 220), актуаторы в сборе (например, платформа 690, шарнир 694) и адаптер (например, зажим, фиксатор) для удерживания рабочего элемента. В некоторых вариантах осуществления настоящего изобретения, вычислительное устройство без дисплея или камера может быть соединено с возможностью съема с компонентами, находящимися на устройстве. Вычислительное устройство может включать, по меньшей мере, один блок памяти, функционально соединенный, по меньшей мере, с одним процессором, при этом, один из, по меньшей мере, одного блока памяти может хранить в себе команды, которые при выполнении одним из процессоров, заставляют систему (включая вычислительное устройство и устройство) выполнить, по меньшей мере, один из раскрытых вариантов осуществления настоящего изобретения. В некоторых вариантах осуществления настоящего изобретения, дисплей может быть функционально соединен, с одним из, по меньшей мере, одного процессора в вычислительном устройстве. В некоторых вариантах осуществления настоящего изобретения, вычислительное устройство может включать дисплей. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один датчик (например, камера, ультразвуковой датчик) может быть функционально соединен с одним из, по меньшей мере, одного процессора в вычислительном устройстве. В некоторых вариантах осуществления настоящего изобретения, вычислительное устройство может включать, по меньшей мере, один датчик (например, камера, ультразвуковой датчик).
[00101] В различных вариантах осуществления настоящего изобретения, система 680 может включать, по меньшей мере, один датчик для облегчения установления местоположения инструмента (например, инфракрасный датчик, лазерный датчик, ультразвуковая дальнометрия и так далее). Например, и в некоторых вариантах осуществления настоящего изобретения, система 680 может включать камеру 682, которая может использоваться в комбинации с интеллектуальным устройством 681 для построения карты 684 материала, подлежащего обработке. Камера 682 может быть соединена или прикреплена к любому инструменту 699 для предоставления позиционирования этому инструменту 699. В некоторых вариантах осуществления настоящего изобретения, камера 682 соединена с дисплеем 689 и ЦПУ 683. Например, камера 682 может быть частью компьютера или интеллектуального устройства 681, которая может быть прикреплена или соединена с любым инструментом 699. Программное приложение или код 685 может быть установлен на мобильном смартфоне и может использовать камеру, ЦПУ, блок памяти и дисплей смартфона. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один аспект программного обеспечения или обработки может выполняться матричным устройством, программируемым пользователем («МУПП»), или цифровым сигнальным процессором («ЦСП»).
[00102] В некоторых вариантах осуществления настоящего изобретения, камера 682 может снимать изображения с высокой частотой кадров. Например, камера может сканировать поверхность материала, чтобы получить отсканированные данные или отсканированные данные изображения. В некоторых вариантах осуществления настоящего изобретения, камера может сканировать поверхность материала, а процессор может обрабатывать сканирование для генерации отсканированных данных, указывающих карту поверхности материала. Это может облегчить функции установления местоположения или функции создания карты, раскрытые в настоящем документе. Камера 682 также может снимать изображения с относительно низкой частотой кадров, и камера 682 может быть соединена, по меньшей мере, с одним оптическим датчиком (например, с датчиком, находящимся в оптических компьютерных мышах). Оптические датчики могут предоставлять информацию о точном расчете траектории с низким значением задержки. Эти оптические датчики могут использоваться в сочетании с камерой 682. Например, камера 682 может предоставлять точную информацию об общем положении несколько раз в секунду и с заметным интервалом времени, а оптические датчики могут использоваться для предоставления информации о точном расчете траектории с очень коротким интервалом времени, который приходится на время, прошедшее с момента съемки последнего изображения. В некоторых вариантах осуществления настоящего изобретения, для информации о точном расчете траектории может использоваться инерциальный измерительный блок (ИИБ). Система 680 может использовать несколько камер для улучшения точности или диапазона охвата при сканировании, или для предоставления детальной информации.
[00103] В некоторых вариантах осуществления настоящего изобретения, система 680 выполнена с возможностью построения, генерации или приема иным образом карты 684. В некоторых вариантах осуществления настоящего изобретения, карта 684 может быть построена с использованием машинного распознавания образов («МРО») или сенсорных методов. Например, метод МРО может использоваться для построения фото-мозаики. Процесс фото-мозаики может включать несколько фотографий различных частей одного и того же объекта и соединение, по меньшей мере, двух из фотографий вместе, чтобы сделать, по меньшей мере, одно общее изображение, охватывающее некоторые или все детали объекта.
[00104] В некоторых вариантах осуществления настоящего изобретения, система 680 или процессор может быть выполнена с возможностью оценки отсканированных данных с использованием метода, который включает одновременную локализацию и создание карты («ОЛСК»). ОЛСК может включать использование датчика, который соединен с возможностью связи с процессором 683 и зависимым программным обеспечением 685, для построения карты 684 материала, подлежащего обработке (или «целевого материала»), при установлении (например, одновременно) местоположения инструмента 699 относительно карты 684. Например, после построения, по меньшей мере, участка карты, камера 682 может захватить изображения обрабатываемого материала. Изображения могут подаваться на интеллектуальное устройство 681, и обрабатываться им для установления местоположения инструмента 699 или установки. Система 680 может анализировать захваченные изображения на основании карты 684 для установления местоположения камеры 681 относительно материала. После определения местоположения камеры 682, в некоторых вариантах осуществления настоящего изобретения, система 680 может идентифицировать тот факт, что местоположение установки известно, или его можно установить по смещению от положения камеры 682, которая может быть жестко прикреплена к установке.
[00105] В некоторых вариантах осуществления настоящего изобретения, для построения карты, по меньшей мере, один процессор (например, ЦПУ/Процессор 683) системы (например, системы 680) использует, по меньшей мере, одну камеру (например, камеру 682) для захвата, по меньшей мере, одного изображения рабочей поверхности. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор может проанализировать каждое изображение для идентификации меток или маркеров на рабочей поверхности. В некоторых вариантах осуществления настоящего изобретения, метки могут относиться к признакам заготовки (например, узоры древесной структуры). В некоторых вариантах осуществления настоящего изобретения, маркеры могут быть помещены на рабочей поверхности пользователем. Например, пользователь может применить ленту с маркерами местоположения (например, маркеры с узорами домино, маркеры со штрих-кодом, маркеры с двухмерным кодом, маркеры с двоичными изображениями, фидуциальные маркеры), имеющими узоры с известными размерами (например, длина, ширина, расстояние между узорами, шаг), которые напечатаны по всей длине ленты. В некоторых вариантах осуществления настоящего изобретения, каждый узор может иметь закодированный идентификатор, который может быть декодирован, по меньшей мере, одним процессором, использующим изображение узора и алгоритмы обработки изображения. Закодированный идентификатор для каждого маркера может быть не уникальным. Например, лента с маркерами местоположения может включать 100 уникальных идентификаторов, которые повторяются. В этом примере, рабочая поверхность может иметь два маркера с одинаковым закодированным идентификатором, если пользователь использует длинный сегмент ленты или прерывистые сегменты ленты. В некоторых случаях, закодированный идентификатор маркера может быть некорректно декодирован, по меньшей мере, одним процессором (например, на основании обрезков, охватывающих закодированный узор), что может привести к тому, что два маркера будут иметь одинаковый идентификатор.
[00106] В некоторых вариантах осуществления настоящего изобретения, для генерации карты с помощью набора захваченных изображений, по меньшей мере, один процессор анализирует каждое изображение для идентификации меток/маркеров. Для каждого изображения в наборе захваченных изображений устанавливаются данные, соответствующие идентификатору изображения, для информации об изображении и метке/маркере, включая информацию об идентификаторе мети/маркера и положении для каждой метки/маркера в изображении. В некоторых вариантах осуществления настоящего изобретения, идентификатор маркера может быть основан на закодированном идентификаторе закодированного узора. В некоторых вариантах осуществления настоящего изобретения, идентификатор метки может быть основан на характеристике метки (например, основан на цвете, если метка представляет собой узор древесной структуры). В некоторых вариантах осуществления настоящего изобретения, данные, включая информацию об идентификаторе изображения и уровне метки/маркера на изображении, для всех изображений в наборе захваченных изображений анализируются вместе, с учетом ограничений, полученных из изображений, где появляются метки/маркеры (например, относящиеся к положению каждой метки/маркера на каждом изображении) с использованием методов МРО или ОЛСК, относящихся к признакам и составлению карты, для установления положений метки/маркера. В некоторых вариантах осуществления настоящего изобретения, полученные положения метки/маркера вместе с соответствующими идентификаторами метки/маркера используются для создания глобального списка меток/маркеров (например, для каждой метки/маркера, используя идентификатор и положение), при этом, термин «глобальный» используется для указания на тот факт, что этот список меток/маркеров не является особым для какого-либо одного захваченного изображения, этот список может содержать информацию о метках/маркерах, которые появляются только в некоторых захваченных изображениях, и что, возможно, ни одно захваченное изображение не содержит всех меток/маркеров в списке. Термин «список», в том смысле, в котором он используется в настоящем документе, может представлять собой данные любого формата (например, структурированные, неструктурированные, комбинацию структурированных и неструктурированных данных), относящиеся к элементам списка.
[00107] В некоторых вариантах осуществления настоящего изобретения, положение для каждой метки/маркера может быть выражено с использованием шести или менее шести чисел степеней свободы. В некоторых вариантах осуществления настоящего изобретения, положение каждой метки/маркера задается как координата X, координата Y и угол ориентации относительно оси X (при условии, что метка/маркеры все лежат в двухмерной плоскости). В некоторых вариантах осуществления настоящего изобретения, в дополнение к использованию размеров или шага маркеров, если они известны заранее (например, если это известные узоры, напечатанные на ленте), по меньшей мере, один процессор может использовать, по меньшей мере, одно измерение (например, выполненное пользователем) признаков, включенных в рабочую поверхность, для регулировки масштабирования положений метки/маркера по одному или нескольким измерениям.
[00108] В некоторых вариантах осуществления настоящего изобретения, система может использовать глобальный список меток/маркеров в качестве карты. В последующей обработке для установления местоположения камеры с использованием карты, новое изображение рабочей поверхности может быть захвачено камерой. Захваченное изображение может быть проанализировано, по меньшей мере, одним процессором (например, ЦПУ/Процессором 683) для того, чтобы идентифицировать метки/маркеры, включенные в новое изображение. В некоторых вариантах осуществления настоящего изобретения, новый список меток/маркеров (например, для каждой метки/маркера, используя идентификатор метки/маркера и информацию о том, где метка/маркер появляется в изображении) генерируется на основании меток/маркеров, идентифицированных в новом изображении. Если используются маркеры местоположения, в некоторых вариантах осуществления настоящего изобретения, то генерируется список суб-признаков (например, для каждого субпризнака, используя идентификатор суб-признака и положение суб-признака в новом изображении), составляющих идентифицированные маркеры в новом изображении. Например, если маркер представляет собой маркер 708, как показано на Фигуре 7В, то количество суб-признаков в этом маркере должно быть 10, исходя из того, что в маркере находятся 10 белых капель. Предполагая, что новое изображение включает совокупность маркеров, показанных на Фигуре 7В, список суб-признаков должен включать все белые капли во всех 55 маркерах.
[00109] Если используются маркеры местоположения, в некоторых вариантах осуществления настоящего изобретения, то, по меньшей мере, один процессор может идентифицировать кандидата в список маркеров из глобального списка как совпадающего с маркерами из нового списка, на основании совпадения, по меньшей мере, одного идентификатора маркера в двух списках. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор может сравнить идентификаторы маркера близлежащих маркеров, если идентификатор маркера у маркера из нового списка совпадает с идентификатором маркера у маркера из глобального списка. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор (например, ЦПУ/Процессор 683), используемый для идентификации кандидата в список маркеров из глобального списка как совпадающего для маркеров из нового списка, может исполнять команды, хранящиеся, по меньшей мере, в одном блоке памяти (например, в Памяти 687), который реализует математическое моделирование (например, стабильный метод оценки параметров модели на основе случайных выборок - RANSAC), поиски узоров или алгоритмы обхода графа. После того, как список маркеров из глобального списка будет соответствовать списку маркеров из нового списка, в некоторых вариантах осуществления настоящего изобретения, для совпадающего списка маркеров из глобального списка генерируется глобальный список суб-признаков (например, для каждого суб-признака, используя идентификатор суб-признака и положение суб-признака). В некоторых вариантах осуществления настоящего изобретения, идентификатор суб-признака из глобального списка суб-признаков обусловлен идентификатором маркера из глобального списка маркеров. В некоторых вариантах осуществления настоящего изобретения, положение суб-признака в глобальном списке суб-признаков обусловлено идентификатором маркера и положением суб-признака в глобальном списке маркеров. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор может использовать список субпризнаков и глобальный список суб-признаков, и, по меньшей мере, один алгоритм создания карты (например, способ решения проблемы PnP - Perspective-n-Point - задача установления положения объекта относительно камеры) для установления местоположения камеры после того, как снято новое изображение.
[00110] В некоторых вариантах осуществления настоящего изобретения, в качестве карты может использоваться фото-мозаика или единственное изображение, показывающее рабочую поверхность (например, снятое цифровой однообъективной зеркальной камерой (DSLR - digital single-lens reflex), снятое Камерой 682 системы 680). В некоторых вариантах осуществления настоящего изобретения, новое изображение рабочей поверхности, захваченное камерой (например, Камерой 682 системы 680), можно сравнить с фотомозаикой для установления местоположения камеры. В некоторых вариантах осуществления настоящего изобретения, комбинация фото-мозаики и глобального списка меток/маркеров может использоваться в качестве карты для установления местоположения камеры (например, Камеры 682 системы 680) на основании изображения рабочей поверхности (включая, по меньшей мере, одну метку/маркер), снятого камерой. В некоторых вариантах осуществления настоящего изобретения, новое изображение рабочей поверхности, захваченное камерой (например, Камерой 682 системы 680), можно сравнить с единственным изображением для установления местоположения камеры. В некоторых вариантах осуществления настоящего изобретения, единственное изображение, снятое камерой, и глобальный список меток/маркеров могут использоваться для установления местоположения камеры (например, Камеры 682 системы 680). В таких вариантах осуществления настоящего изобретения, глобальный список меток/маркеров используется в качестве карты.
[00111] В различных вариантах осуществления настоящего изобретения, могут использоваться различные иные технологии обработки и установления местоположения, включая, например, интегрированные беспроводные сенсорные технологии установления местоположения, например, радиочастотные, связи ближнего радиуса действия, Bluetooth, лазерного отслеживания и считывания или иные подходящие способы для установления положения инструмента 699 сверху заготовки. Например, ультразвуковая, инфракрасная дальнометрия или лазеры могут использоваться для определения местоположения инструмента относительно рабочей области или поверхности материала. Определенное местоположение инструмента может быть предоставлено любому другому компоненту системы 680 для облегчения направления или регулировки положения инструмента в соответствии с вариантом осуществления настоящего изобретения.
[00112] В некоторых вариантах осуществления настоящего изобретения, система 680 может быть выполнена с возможностью вычисления местоположения инструмента 699 относительно установки, используя текущую ориентацию валов двигателя. Например, система 680 может идентифицировать ориентацию валов двигателя путем возвращения их в исходное положение и последующего отслеживания, по меньшей мере, одного действия, предпринятого после процесса возвращения в исходное положение. В некоторых вариантах осуществления настоящего изобретения, система 680 может использовать кодеры, которые могли бы использоваться вместо возвращения в исходное положение, поскольку кодеры могли бы непосредственно определить ориентацию валов. Используя смещения и расчеты, система 680 может идентифицировать местоположение инструмента 699 или установки относительно обрабатываемого материала. Захваченные изображения, которые могут быть проанализированы путем сопоставления с картой 684, могут включать, например, характеристики материала, например, текстура древесины и деформации, или могут включать маркеры, помещенные на материал. Различные аспекты технологии создания карты и установления местоположения будут описаны более подробно ниже.
[00113] В некоторых вариантах осуществления настоящего изобретения, система 680 может принимать конструктивный чертеж 686 или шаблон. Например, интеллектуальное устройство 681 может быть выполнено с возможностью приема конструктивного чертежа 686 или шаблона от пользователя системы 680. Интеллектуальное устройство 681 может включать или иметь доступ к различным устройствам ввода/вывода данных, выполненным с возможностью приема конструктивного чертежа 686. В некоторых вариантах осуществления настоящего изобретения, система 680 может принимать конструктивный чертеж 686 посредством сети. В некоторых вариантах осуществления настоящего изобретения, пользователь или система 680 может изменять или регулировать конструктивный чертеж 686 на основании карты 684. Например, пользователь может регулировать размер конструктивного чертежа 686 относительно карты 684 материала для того, чтобы создать желаемую рабочую траекторию на обрабатываемом материале. В некоторых вариантах осуществления настоящего изобретения, система 680 может автоматически регулировать или оптимизировать размер конструкции на основании размеров материала.
[00114] Сеть может включать компьютерные сети, например, Интернет, локальные сети, сети метрополитена или глобальные сети, интрасети и другие сети связи, например, сети мобильной телефонной связи. Сеть может использоваться для доступа к веб-страницам, онлайн-магазинам, компьютерам или к данным магазинов розничной торговли, которые могут отображаться или использоваться, по меньшей мере, одним пользовательским устройством, системой 680 или системой 100, такой как, например, ноутбук, настольный компьютер, планшет, персональный цифровой помощник, смартфон или портативный компьютер.
[00115] Система 680 может быть выполнена с возможностью создания, захвата или загрузки конструктивных чертежей 686 множеством способов. В некоторых вариантах осуществления настоящего изобретения, конструкции можно загрузить или получить иным образом. Например, пользователь может сгенерировать конструкцию на вычислительном устройстве и передать или иным образом перенести конструкцию в систему 680. В другом примере осуществления настоящего изобретения, система 680 может принять конструкцию от третьего лица. Например, пользователь может приобрести конструкцию онлайн посредством сети и загрузить конструкцию на интеллектуальное устройство или компьютер 681. В некоторых вариантах осуществления настоящего изобретения, система 680 может облегчить захват карты поверхности, а также конструктивный чертеж 686 на этой поверхности. Это может облегчить настройку системы 680 для того, чтобы она следовала определенной линии или для показа пользователю изображения поверхности материала, находящейся под крупногабаритным инструментом, который затрудняет обзор, или для показа поверхности с начерченным чертежом в первоначальном состоянии, до того, как она будет охвачена обрезками, или поверхности с начерченным на ней чертежом, которая будет срезаться. В некоторых вариантах осуществления настоящего изобретения, конструктивный чертеж 686 можно спроектировать, изменить, или им можно управлять, исходя из его оригинальной формы на устройстве 681, посредством интерфейса, управляемого через меню, благодаря чему пользователь может вводить расстояния, углы и формы или делать чертеж от руки на панели с сенсорным управлением или на дисплее.
[00116] В некоторых вариантах осуществления настоящего изобретения, пока пользователь перемещает систему или установку 680 по целевому материалу, интеллектуальное устройство 681 обрабатывает изображения, захваченные из камеры 682, устанавливает местоположение установки 680 или предоставляет пользователю желаемую траекторию на дисплее 689. После того, как пользователь поместил установку 680 рядом с желаемой траекторией, установка или система 680 может автоматически регулировать положение инструмента 699 для достижения желаемой рабочей траектории в соответствии с загруженным конструктивным чертежом 686. Термин «установка» и «система» могут использоваться взаимозаменяемым образом, как это описано в настоящем документе. В некоторых вариантах осуществления настоящего изобретения, установка включает физическое устройство, его комплектующие, а система включает физическое устройство, его комплектующие и код соответствующей технологии и программного обеспечения, встроенный или включенный в некоторые из физических элементов.
[00117] В некоторых вариантах осуществления настоящего изобретения, система 680 строит карту 684 на основании изображения, захваченного камерой, по произвольной траектории целевого материала до тех пор, пока не будет охвачена вся интересующая область. Например, пользователь может передвигать камеру 300 по произвольной траектории по поверхности материала до тех пор, пока не будет охвачена вся интересующая область. В некоторых вариантах осуществления настоящего изобретения, система 680 может быть выполнена с возможностью, позволяющей удалить камеру 682 из установки 680 для того, чтобы передвинуть или провести ее над областью материала. Система 680 может соединить вместе изображения, полученные камерой 682. Например, система 680 может использовать программный код мозаики изображения 685 для формирования связанной карты 684 интересующей области поверхности материала. Система 680 может хранить карту 684 в блоке памяти 687. После приема изображения материала, нанесенного на карту, который отснят камерой 682, система 680 может сравнить изображение с картой 684, хранящейся в блоке памяти 687, и, в дальнейшем, может установить положение и ориентацию. Например, система 680 может установить, на основании сравнения, положение инструмента, бура, системы, режущего элемента, платформы или установки.
[00118] В некоторых вариантах осуществления настоящего изобретения, система 680 может позволить пользователю создать и загрузить конструктивный чертеж 686 после того, как карта 684 будет собрана. Например, после того как карта 684 будет собрана на интеллектуальном устройстве 681 (например, на компьютере), пользователь сможет создать конструктивный чертеж 686 на компьютере, нанеся его непосредственно на созданную карту 684. Например, пользователь может отметить положения на куске древесины, где желательно просверлить отверстие. Методы и признаки программного кода 685 (включая конструкцию, созданную с помощью компьютера, и изготовление) могут использоваться для создания конструкции с точными измерениями. Затем, когда пользователь возвращается к материалу, он может увидеть на экране или дисплее 689 отображение положения камеры 682 на карте 684 с конструктивным чертежом 686, наложенным на карту 684. Например, система 680 может отображать на устройстве отображения изображение карты, наложенное с указанием положения (например, положения датчика, устройства, режущего инструмента или инструмента для черчения) относительно поверхности материала. В некоторых вариантах осуществления настоящего изобретения, система 680 может идентифицировать местоположение инструмента относительно карты. Например, камера 682 может быть прикреплена к буру и использоваться для установления точного положения бура относительно целевых местоположений бура, указанных в конструктивном чертеже 686, что облегчает пользователю выравнивание бура более точным образом.
[00119] В некоторых вариантах осуществления настоящего изобретения, система 680 выполнена с возможностью построения карты и отслеживания положения камеры, используя визуальные признаки целевого материала. В некоторых вариантах осуществления настоящего изобретения, программное обеспечение 685 включает указания для построения карты и отслеживания положения камеры, используя визуальные признаки материалов, например, узоры, неровности или метки. Целевой материал может быть изменен для облегчения составления карты и функций отслеживания. Например, однотонный пластик может быть слишком однообразным для системы 680, чтобы можно было осуществлять эффективное отображение или отслеживание. Следовательно, пользователь может, например, каким-либо образом изменить поверхность материала, чтобы добавить признаки, которые можно отслеживать. В другом примере, система 680 может отдать команду маркеру произвольно добавить признаки, которые можно отслеживать. Например, признаки, которые могут быть добавлены, могут включать чернила, добавленные в материал, которые обычно невидимы, но которые можно увидеть либо в невидимом спектре, либо в видимом спектре при применении ультрафиолетового или другого света, что позволяет камере отслеживать узор, созданный невидимыми чернилами, и в то же время не показывать каких-либо видимых отметок по завершению работы. В некоторых вариантах осуществления настоящего изобретения, пользователь может применять стикеры с маркерами, которые позже могут быть удалены. Признаки также могут быть спроецированы на материал, например, с помощью проектора. В некоторых вариантах осуществления настоящего изобретения, проецируемые признаки могут быть выполнены с использованием невидимого света (например, инфракрасного, ультрафиолетового света). В некоторых вариантах осуществления настоящего изобретения, датчик, чувствительный к невидимому свету (например, инфракрасная камера), может использоваться для сканирования рабочей поверхности с целью захвата невидимых проецируемых признаков. Или, если пользователь позже закрасит материал или по другим причинам не будет заботиться о внешнем виде материала, то пользователь может просто разметить материал карандашом или маркером.
[00120] В некоторых вариантах осуществления настоящего изобретения, маркерная лента или стикеры могут включать уникальную последовательность штрих-кодов по всей длине ленты. В некоторых вариантах осуществления настоящего изобретения, маркерная лента может быть тонкой, в результате чего устройство может проходить через маркерную ленту без застревания или повреждения. В некоторых вариантах осуществления настоящего изобретения, лента может быть спроектирована и создана таким образом, что она будет оставаться внизу при перемещении устройства по ленте, но ее также можно будет легко снять после завершения проекта. Материалы маркерной ленты могут включать, например, винил или любой другой подходящий материал. В некоторых вариантах осуществления настоящего изобретения, маркерная лента (например, лента с маркерами местоположения) может включать узоры, которые могут быть определены с использованием датчика, чувствительного к невидимому свету (например, инфракрасная камера). В некоторых вариантах осуществления настоящего изобретения, маркерная лента (например, лента с маркерами местоположения) может включать узоры, которые флуоресцируют, реагируя на освещение светом определенной длины волны.
[00121] В случаях, когда камера не может отслеживать материал или не может сделать это достаточно точно, или материал не подходит для отслеживания (например, из-за неровной поверхности), или по любой другой причине, которая мешает камере непосредственно отслеживать поверхность, камера может отслеживать другие маркеры на материале. Например, пользователь может поставить стенки над, под или вокруг сторон обрабатываемого материала, которые имеют определенные признаки или метки. Признаки или метки на окружающих поверхностях могут позволить камере установить свое положение на материале или относительно него. В различных вариантах осуществления настоящего изобретения, различные типы технологий позиционирования или устройств могут использоваться для определения местоположения инструмента 699 или платформы 690, возможно, в сочетании с камерой 682, которая используется, главным образом, для записи внешнего вида материала без необходимости выполнения функции отслеживания. Технология позиционирования может включать, например, ультразвуковой, инфракрасный диапазон или лазеры.
[00122] Система 680 может регулировать точное местоположение инструмента 699, регулируя местоположение платформы 690 или подвижной платформы, к которой прикреплен инструмент 699. Платформа 690 может быть соединена с эксцентриком, соединенным с валом двигателя. Когда вал двигателя движется по круговой траектории, эксцентрик перемещает платформу 690 по сложным дугам и траекториям. Шарнир 694 может быть соединен с платформой, а также соединен с эксцентриком, соединенным со вторым или шарнирным валом двигателя. Шарнир 694 может быть выполнен с возможностью тянуть или толкать платформу 690 для достижения управляемого перемещения платформы в диапазоне 360 градусов. Управляя вращением эксцентриков, система 680 может расположить платформу практически в любом положении XY в диапазоне.
[00123] В некоторых вариантах осуществления настоящего изобретения, система 680 использует справочно-поисковую таблицу для облегчения направления инструмента. Например, справочно-поисковая таблица может включать координаты двигателя, относящиеся к желаемым положениям платформы. В некоторых вариантах осуществления настоящего изобретения, система 680 может осуществлять расчеты, которые можно использовать для регулировки двигателей, которые перемещают платформу 690 и режущий наконечник инструмента 699, соединенный с платформой 690, в желаемое местоположение. В некоторых вариантах осуществления настоящего изобретения, система 680 может перемещать инструмент 699 на 360 градусов в двухмерной плоскости путем позиционирующей платформы 690 и шарнира 694. Например, режущую часть инструмента можно перемещать в любое место в пределах 360-градусного окна целевого диапазона 408.
[00124] В некоторых вариантах осуществления настоящего изобретения, электродвигатели могут перемещать, позиционировать или регулировать платформу 690 и шарнир 694. Контроллер двигателя платформы 691 может управлять двигателем платформы 210. Контроллер двигателя шарнира 695 может управлять двигателем шарнира 220. Контроллер двигателя платформы 691 и контроллер двигателя шарнира 695 могут принимать информацию, которая включает желаемое местоположение или координаты из интеллектуального устройства 681. На основании принятой информации, контроллер двигателя платформы 691 и контроллер двигателя шарнира 695 могут активировать и управлять своими соответствующими двигателями 210, 220 для помещения платформы 690 и шарнира 694 в надлежащее или желаемое положение, тем самым позиционируя инструмент в желаемое местоположение.
[00125] В некоторых вариантах осуществления настоящего изобретения, интеллектуальное устройство 681 может устанавливать связь с инструментом 699, получать от него информацию и управлять им. Например, интеллектуальное устройство 681 может отправлять команды включить или выключить, увеличить или уменьшить скорость. В некоторых вариантах осуществления настоящего изобретения, указания могут сигнализировать, когда входить в контакт с целевым материалом, например, регулируя глубину инструмента 699, когда пользователь находится достаточно близко или около желаемой траектории на материале.
[00126] На Фигуре 4 предоставлена иллюстративная блок-схема варианта осуществления способа 600 для выполнения задачи на целевом материале. Например, способ 600 может облегчить резание рабочей поверхности с использованием варианта осуществления настоящего изобретения на основе маршрутизатора. В некоторых вариантах осуществления настоящего изобретения, в действии 602 пользователь может найти или создать конструкцию, которую он хочет вырезать из материала. В некоторых вариантах осуществления настоящего изобретения, задача может включать множество задач (например, первая задача и вторая задача, которые могут представлять собой подмножество единой задачи). Например, задача вырезания конструкции из материала может содержать первую задачу вырезания первого участка конструкции и вторую задачу вырезания второго участка конструкции. В некоторых вариантах осуществления настоящего изобретения, первая и вторая задача могут быть, по существу, аналогичными (например, аналогичный тип режущего инструмента или инструмента для черчения), в то время как в других вариантах осуществления настоящего изобретения, первая и вторая задачи могут отличаться (например, другой буровой наконечник или инструмент для черчения, другой тип режущего инструмента, другое пользовательское устройство, другая область материала и так далее).
[00127] Пользователь может нанести на карту поверхность материала или лист материала до или после идентификации конструктивного чертежа. Если материал имеет маркировку в достаточном объеме, то пользователь может использовать сам материал. Однако в действии 604, если материал имеет плоскую поверхность или маркировку в ограниченном объеме, то пользователь может поместить маркеры на материале. Маркеры могут включать, например, печатные маркерные стикеры, или они могут иметь иной тип подходящей индикации, которую можно легко идентифицировать.
[00128] В некоторых вариантах осуществления настоящего изобретения, в действии 606 датчик может отсканировать материал для получения отсканированных данных. Например, камера сканирует материал и различные маркеры для создания карты. ЦПУ может обработать изображения, захваченные датчиком или камерой, и создать карту или отсканированные данные. Размер и форма карты могут быть соответствующим образом изменены, в соответствии с предпочтительной конфигурацией. В некоторых вариантах осуществления настоящего изобретения, в действии 608 конструкция зарегистрирована или иным образом связана с картой для создания чертежа для резания.
[00129] В некоторых вариантах осуществления настоящего изобретения, в действии 610 режущий инструмент готов для выполнения задачи. Например, пользователь может загрузить, отрегулировать или закрепить наконечник, вмонтировать его в установку и включить маршрутизатор. В некоторых вариантах осуществления настоящего изобретения, система может включать маршрутизатор посредством способа, инициированного программным обеспечением, реагируя, по меньшей мере, на один параметр, включая, например, считывание пользователем перемещения системы 680 в определенном направлении.
[00130] В некоторых вариантах осуществления настоящего изобретения, в действии 612 система может принимать различные настройки. Например, пользователь может установить ширину наконечника режущего инструмента, диапазон (например, область) коррекции желаемого диапазона инструмента, размер перекрестья или скорость режущего инструмента. После этого, программному обеспечению могут быть предоставлены команды начать задачу.
[00131] В некоторых вариантах осуществления настоящего изобретения, в действии 614, установка помещена рядом с желаемой траекторией, таким образом, система может автоматически перевести положение инструмента в начальное положение диапазона регулировки по желаемой траектории. Затем пользователь может следовать стратегии постоянной скорости, как описано в настоящем документе, например, в отношении Фигуры 3. В некоторых вариантах осуществления настоящего изобретения, как только инструмент полностью пройдет по чертежу (действие 616), пользователь может удалить устройство и результат работы из материала.
[00132] На Фигуре 5 показана иллюстративная блок-схема варианта осуществления способа 650 по настоящему изобретению для стратегии постоянной скорости. Способ, показанный на Фигуре 3, предполагает, что пользователь уже прикрепил маршрутизатор к установке и создал карту своего материала, и загрузил его конструкцию. В некоторых вариантах осуществления настоящего изобретения, в действии 651 пользователь запускает процесс резки материала. Процесс может включать перемещение инструмента на место в пределах диапазона чертежа или траектории на материале (действие 653). Например, пользователь может перемещать инструмент, или инструментом можно управлять дистанционно.
[00133] В некоторых вариантах осуществления настоящего изобретения, этот способ включает установление того факта, на основании местоположения инструмента, есть ли точка на чертеже в пределах диапазона регулировки установки (действие 655). В случае отсутствия точки в пределах диапазона, способ может включать отправку уведомления (например, посредством дисплея, звука, вибрации, света или светодиодов) и ожидание момента, когда пользователь переместит устройство в пределы диапазона регулировки (действие 657).
[00134] В некоторых вариантах осуществления настоящего изобретения, если точка в пределах диапазона регулировки имеется, то способ включает, в действии 659, установку точки на чертеже, в самом ближайшем к инструменту месте, в качестве целевой точки. В некоторых вариантах осуществления настоящего изобретения, этот способ может включать перемещение инструмента к целевой точке и резку материала (действие 661).
[00135] В некоторых вариантах осуществления настоящего изобретения, этот способ включает создание второй цели путем установления того факта, находится ли новая цель в пределах диапазона регулировки (действие 663). Если вторая цель имеется, то способ может включать установку второй целевой точки в качестве новой цели (действие 665). Устройство может продолжать перемещаться в направлении по часовой стрелке, осуществляя резание в направлении от старой целевой точки до новой целевой точки. В некоторых вариантах осуществления настоящего изобретения, этот способ может включать идентификацию следующий целевой точки в пределах диапазона регулировки (действие 663), пока инструмент или маршрутизатор осуществляет резание в направлении от старой целевой точки до новой целевой точки. Например, установление оптимальной или желаемой второй цели может быть непрерывным и основываться на изображении или различных изображениях, определенных с помощью камеры и обработанных системой.
[00136] Если в пределах диапазона целевой точки нет, в некоторых вариантах осуществления настоящего изобретения, то способ включает очистку целевой точки (действие 667) и проведение, в действии 655, установления того факта, существует ли точка на чертеже в пределах диапазона регулировки. В некоторых вариантах осуществления настоящего изобретения, этот способ продолжается до тех пор, пока инструмент не пройдет по всему чертежа или по его части в определенном направлении, например, в направлении по часовой стрелке.
[00137] В некоторых вариантах осуществления настоящего изобретения, фаза создания карты может быть пропущена, если размер материала больше, чем конструкция. Например, пользователь может установить начальную точку, которая соответствует области на конструкции (то есть, верхний правый угол), и система 800 может начать рисовать изображение.
[00138] Варианты осуществления настоящего изобретения, обсуждаемые в настоящем документе, до сих пор были сфокусированы на установках, в которых размещается инструмент, прикрепленный к платформе, и платформа перемещается или управляется, по меньшей мере, одним двигателем. Линейная конструкция изображает маршрутизатор, перемещаемый двигателем, где маршрутизатор соединен с линейной платформой. В таких случаях, маршрутизатор прикрепляют или монтируют в виде отдельного блока. Однако система может быть спроектирована в виде единого блока с платформой, двигателями, перемещающими платформу, контроллерами, и все они находятся в одном и том же корпусе и в одной и той же системе питания, в которой находятся корпус и питание инструмента. Например, корпус маршрутизатора можно было бы увеличить, чтобы он соответствовал платформе и двигателям, и чтобы в него можно было включить дисплей, встроенный в корпус. Благодаря такому варианту осуществления настоящего изобретения, форм-фактор может быть улучшен для того, чтобы он выглядел как цельный инструмент.
[00139] Представленные в настоящем документе варианты осуществления настоящего изобретения не являются исчерпывающими. Возможны и другие варианты осуществления настоящего изобретения с использованием концепций, описанных в настоящем документе. Кроме того, компоненты в этих вариантах осуществления настоящего изобретения могут быть реализованы различными способами. Например, линейная платформа или шарнирное соединение, или электромагнитное скольжение, или другой механизм позиционирования могут использоваться для регулировки инструмента или платформы, на которой находится инструмент, реагируя на его обнаруженное положение и его предполагаемое положение.
[00140] Например, системы и способы, описанные в настоящем документе, могут использоваться бурами, пневмомолотками и другими инструментами, которые работают в неподвижном положении. В таких вариантах осуществления настоящего изобретения, инструмент и программное обеспечение могут быть модифицированы таким образом, чтобы чертеж включал, по меньшей мере, одну целевую точку вместо целой конструкции. Устройство может быть перемещено пользователем так, чтобы целевое положение находилось в пределах диапазона регулировки. Затем программное обеспечение может переместить инструмент в правильное целевое положение. Затем пользователь может использовать инструмент, чтобы просверлить отверстие, вбить гвоздь или выполнить другие операции.
[00141] В некоторых вариантах осуществления настоящего изобретения, инструменты могут облегчать выполнение задачи без предоставления автоматической регулировки. Например, платформа, шарнир, двигатели и эксцентрики могут быть удалены. Инструмент может быть прикреплен к корпусу нижней платформы. Программное обеспечение может быть модифицировано таким образом, чтобы чертеж включал, по меньшей мере, одну целевую точку. Пользователь может перемещать устройство так, чтобы инструмент находился непосредственно над целевым положением. Пользователь может использовать обратную связь с местоположением, предоставленным на дисплее, для выполнения точного позиционирования.
[00142] В некоторых вариантах осуществления, настоящее изобретение облегчает направление или позиционирование лобзика. Пилку лобзика можно вращать и перемещать в направлении пилки, но не перемещать перпендикулярно пилки, иначе ее заклинит. Настоящее изобретение может включать вращающуюся платформу, которая может быть помещена сверху позиционирующей платформы. Лобзик может быть прикреплен к этой вращающейся платформе. Программное обеспечение может быть модифицировано для того, чтобы заставить лобзик выполнять работу, следуя чертежу, и повернуться в правильной ориентации, и сделать так, чтобы лобзик не был перемещен перпендикулярно пилке. В некоторых вариантах осуществления настоящего изобретения, ножовочная пила может заменить лобзик для достижения того же эффекта. Процессом резания можно управлять путем вращения вращающейся платформы, и процесс резания можно перемещать по направлению резания путем перемещения позиционирующей платформы. В этом варианте осуществления настоящего изобретения, рабочее перемещение пилки лобзика представляет собой вертикальное режущее перемещение вдоль длинной оси пилки лобзика.
[00143] В некоторых вариантах осуществления настоящего изобретения, система может поддерживать вращение и не поддерживать смещение. Например, система может автоматически ориентировать пилку в прокручивающемся лобзике (например, в лобзике с пилкой, которую можно вращать независимо от корпуса). В этом варианте осуществления настоящего изобретения, программное обеспечение может управлять пилкой, нацеливая ее в правильном направлении, и пользователь может самостоятельно управлять ее положением.
[00144] В некоторых вариантах осуществления настоящего изобретения, система может позиционировать прорезную пилу. Например, камера может быть соединена с прорезной пилой, и пользователь может перемещать материал. Верхнее и нижнее коромысла прорезной пилы могут быть механизированы, в результате чего они могут перемещаться независимо, посредством компьютерного управления. В результате, пользователь может перемещать материал таким образом, чтобы чертеж находился в пределах диапазона регулировки прорезной пилы, а программное обеспечение может регулировать прорезную пилу, следуя чертежу. В некоторых вариантах осуществления настоящего изобретения, верхнее и нижнее коромысла можно перемещать в одно и то же положение или перемещать независимо друг от друга, чтобы делать разрезы, которые не перпендикулярны материалу.
[00145] В некоторых вариантах осуществления настоящего изобретения, устройство коррекции положения может быть вмонтировано в мобильную платформу. Например, устройство может быть помещено на материале для того, чтобы оно двигалось по кругу самостоятельно. Устройство также может быть использовано в альтернативном варианте осуществления настоящего изобретения, при этом, две мобильные платформы протягивают между собой режущую пилку или тросик. Например, каждой платформой можно управлять независимо, что позволяет произвольно перемещать линию разреза в трехмерном пространстве, например, для того, чтобы разрезать пену.
[00146] В некоторых вариантах осуществления настоящего изобретения, система может быть соединена или иным образом прикреплена к машинам или к рабочему оборудованию, например, к дозеру, при этом, механизм коррекции положения вмонтирован в машину. Например, некоторые варианты осуществления системы гибридного позиционирования могут включать транспортное средство, содержащее первую систему коррекции положения, которая имеет погрешность измерения в пределах первого диапазона, и вторую систему коррекции положения, которая имеет погрешность измерения в пределах второго диапазона, который является более точным, чем первый диапазон. Машину можно двигать по листу материала, например, по стальной пластине, лежащей на основании, и режущий инструмент, например, плазменный резак, можно использовать для резки материала. В некоторых вариантах осуществления, настоящее изобретение может упростить координатограф или устройство для черчения, например, для вычерчивания линий на футбольном поле или для маркировки строительной площадки. Машина, например, может включать промышленную машину, например, машину типа вилочкового погрузчика, выполненную с включением резака или другого инструмента, камеры и схемы управления, описанной в настоящем документе, для того, чтобы устанавливать местоположение машины (или инструмента) на материале, идентифицировать, где осуществлять разрез или маркировку материала, и регулировать инструмент, чтобы осуществить разрез или маркировку материала в соответствующем местоположении.
[00147] Фигура 6 представляет собой блок-диаграмму компьютерной системы 600, в соответствии с примерным вариантом осуществления настоящего изобретения. Компьютерная система 600 может использоваться для реализации системы 680. Компьютерная система 600 включает канал передачи информации 605 или другой компонент связи для передачи информации и процессор 610 или схему обработки, соединенную с каналом передачи информации 605 для обработки информации. Компьютерная система 600 также может включать, по меньшей мере, один процессор 610 или схему обработки, соединенную с каналом передачи информации для обработки информации. Компьютерная система 600 также включает блок оперативной памяти 615, например, запоминающее устройство с произвольной выборкой (RAM) или другое динамическое запоминающее устройство, соединенное с каналом передачи информации 605 для хранения информации, и команды для исполнения процессором 610. Блок оперативной памяти 615 может также использоваться для хранения информации о положении, временных переменных или других промежуточных данных во время исполнения команд процессором 610. Компьютерная система 600 может дополнительно включать постоянное запоминающее устройство (ROM) 1220 или другое статическое запоминающее устройство, соединенное с каналом передачи информации 605 для хранения статической информации и команд для процессора 610. Запоминающее устройство 625, например, твердотельное устройство, магнитный диск или оптический диск соединено с каналом передачи информации 605 для постоянного хранения информации и команд. В некоторых вариантах осуществления настоящего изобретения, система 600 может включать, по меньшей мере, один интерфейс связи (не показано; соединен с каналом передачи информации 605) для возможности связи с другими компьютерными системами посредством сети (например, для отправки и приема данных об изготовлении (например, информации, касающейся разрезов, сделанных на рабочей поверхности), для отправки и приема цифровых конструкций или цифровых чертежей).
[00148] Компьютерная система 600 может быть соединена, посредством канала передачи информации 605, с дисплеем 635, например, с жидкокристаллическим дисплеем или с дисплеем с активной матрицей, для отображения информации пользователю. Устройство ввода данных 630, например, клавиатура, включая алфавитно-цифровые и другие клавиши, может быть соединено с каналом передачи информации 605 для передачи информации и выбора команд для процессора 610. В другом варианте осуществления настоящего изобретения, устройство ввода данных 630 имеет дисплей с сенсорным экраном 635. Устройство ввода данных 630 может включать управление курсором, например, мышь, трекбол или клавиши управления курсором, для передачи информации о направлении и выбора команд для процессора 610 и для управления перемещением курсора на дисплее 635.
[00149] В соответствии с различными вариантами осуществления настоящего изобретения, способы, описанные в настоящем документе, могут быть реализованы посредством компьютерной системы 600, реагируя на процессор 610, выполняющий компоновку команд, содержащихся в блоке оперативной памяти 615. Такие команды могут быть переданы в блок оперативной памяти 615 с другого машиночитаемого носителя данных, например, с запоминающего устройства 625. Выполнение компоновки команд, содержащихся в блоке оперативной памяти 615, заставляет компьютерную систему 600 выполнять способы примерных вариантов осуществления настоящего изобретения, описанные в настоящем документе. По меньшей мере, один процессор в мультипроцессорной схеме также может использоваться для исполнения команд, содержащихся в блоке оперативной памяти 615. В альтернативных вариантах осуществления настоящего изобретения, аппаратно-реализованная схема может использоваться вместо программных команд или в сочетании с ними для реализации примерных вариантов осуществления настоящего изобретения. Таким образом, варианты осуществления настоящего изобретения не ограничиваются какой-либо конкретной комбинацией аппаратной схемы и программного обеспечения.
[00150] Хотя примерная компьютерная система была описана в Фигуре 6, варианты осуществления объекта и функциональных операций, описанных в настоящем описании, могут быть реализованы в других типах цифровой электронной схемы или в программном обеспечении для компьютеров, аппаратно-программном обеспечении или аппаратном обеспечении, включая структуры, раскрытые в настоящем описании и их структурные эквиваленты, или в комбинации, по меньшей мере, одного из них.
[00151] Варианты осуществления объекта и операций, описанных в настоящем описании, могут быть реализованы в цифровой электронной схеме или в программном обеспечении для компьютеров, аппаратно-программном обеспечении или аппаратном обеспечении, включая структуры, раскрытые в настоящем описании и их структурные эквиваленты, или в комбинации, по меньшей мере, одного из них. Объект, описанный в настоящем описании, может быть реализован в виде, по меньшей мере, одной компьютерной программы, то есть, по меньшей мере, одной схемы команд компьютерной программы, закодированных, по меньшей мере, на одном носителе данных для компьютеров для исполнения устройством обработки данных или для управления работой устройства обработки данных. В альтернативном или в дополнительном варианте осуществления настоящего изобретения, команды программы могут быть закодированы на искусственно сгенерированном распространяемом сигнале, например, на генерируемом машиной электрическом, оптическом или электромагнитном сигнале, который генерируется для кодирования информации для передачи в подходящее приемное устройство для исполнения устройством обработки данных. Носитель данных для компьютеров может представлять собой, или он может быть включен в машиночитаемое запоминающее устройство, машиночитаемый носитель информации, массив данных или запоминающее устройство с произвольной или последовательной выборкой или в комбинацию, по меньшей мере, одного из них. Кроме того, хотя носитель данных для компьютеров не является распространяемым сигналом, носитель данных для компьютеров может быть источником или местом назначения команд компьютерной программы, закодированных в искусственно сгенерированном распространяемом сигнале. Носитель данных для компьютеров может представлять собой, или он может быть включен, по меньшей мере, в один отдельный компонент или носитель данных (например, в устройство с несколькими компакт-дисками, диск или другое запоминающее устройство). Соответственно, носитель данных для компьютеров является как материальным, так и носителем, предназначенным для долговременного хранения информации.
[00152] Операции, описанные в настоящем описании, могут выполняться устройством обработки данных в отношении данных, хранящихся, по меньшей мере, на одном машиночитаемом запоминающем устройстве или принятых из других источников.
[00153] Термин «устройство обработки данных» или «вычислительное устройство» охватывает различную аппаратуру, устройства и машины для обработки данных, включая, например, программируемый процессор, компьютер, однокристальную систему или многокристальную систему или комбинации вышеизложенного. Устройство может включать логические схемы специального назначения, например, FPGA (программируемая пользователем вентильная матрица) или ASIC (специализированная интегральная схема). Устройство также может включать, в дополнение к аппаратному обеспечению, код, который создает среду исполнения для рассматриваемой компьютерной программы, например, код, который составляет аппаратно-программное обеспечение процессора, пакет протоколов, систему управления базой данных, операционную систему, межплатформенную среду выполнения, виртуальную вычислительную машину или комбинацию, по меньшей мере, одного из них. Устройство и среда исполнения могут реализовывать различную инфраструктуру моделей вычислений, например, веб-службы, инфраструктура распределенных вычислений и инфраструктура грид-вычислений.
[00154] Компьютерная программа (также известная как программа, программное обеспечение, программное приложение, скрипт или код) может быть написана на любом языке программирования, включая скомпилированные или интерпретированные языки, декларативные или процедурные языки, и может быть применена в любой форме, включая в виде отдельной программы или в виде схемы, компонента, подпрограммы, объекта или другого компонента программы, подходящего для использования в вычислительной среде. Компьютерная программа может, но не обязательно, соответствовать файлу в файловой системе. Программа может храниться на участке файла, который содержит другие программы или данные (например, по меньшей мере, один скрипт, хранящийся в документе языка разметки), в единственном файле, выделенном для рассматриваемой программы, или в нескольких скоординированных файлах (например, в файлах, которые хранят, по меньшей мере, одну схему, подпрограмму или участок кода). Компьютерная программа может быть применена для исполнения ее в одной компьютерной системе или в нескольких компьютерных системах, которые расположены на одном сайте или распределены по нескольким сайтам и связаны между собой сетью связи.
[00155] Процессоры, подходящие для исполнения компьютерной программы, включают, например, как микропроцессоры общего и специального назначения, так и любой, по меньшей мере, один процессор цифрового компьютера любого вида. Как правило, процессор будет принимать команды и данные из постоянного запоминающего устройства или из запоминающего устройства с произвольной выборкой, или из обоих этих устройств. Основными элементами компьютера являются процессор для выполнения действий в соответствии с командами и, по меньшей мере, одно запоминающее устройство для хранения команд и данных. Как правило, компьютер также будет включать, или он будет функционально соединен для приема данных или для передачи данных, или и для приема, и для передачи данных, по меньшей мере, на одно запоминающее устройство сверхбольшой емкости для хранения данных, например, на магнитный, магнитооптический или оптический диск. Однако компьютеру не нужны такие устройства. Кроме того, компьютер может быть встроен в другое устройство, например, в мобильный телефон, персональный цифровой помощник (PDA), мобильный аудио- или видеопроигрыватель, игровую консоль, приемник Глобальной системы позиционирования (GPS) или портативное запоминающее устройство (например, флэш-накопитель с интерфейсом универсальной последовательной шины (USB)), и это лишь некоторые из них. Устройства, подходящие для хранения команд компьютерной программы и данных, включают все виды энергонезависимого запоминающего устройства, носители данных и запоминающие устройства, в том числе, например, полупроводниковые запоминающие устройства, например, стираемые программируемые постоянные запоминающие устройства (EPROM), электрически-стираемые программируемые постоянные запоминающие устройства (EEPROM) и устройства флэш-памяти; магнитные диски, например, внутренние жесткие диски или съемные диски; магнитооптические диски; и компакт-диски в формате, доступном только для чтения (CD-ROM) и компакт-диски в цифровом видеоформате (DVD-ROM). Процессор и блок памяти могут быть дополнены или включены в логические схемы специального назначения.
[00156] Для предоставления взаимодействия с пользователем, варианты осуществления объекта по настоящему изобретению, описанные в настоящем описании, могут быть реализованы на компьютере, имеющем устройство отображения, например, монитор на ЭЛТ (электронно-лучевая трубка), монитор ЖКД (жидкокристаллический дисплей), головой дисплей со средой дополненной реальности или головной дисплей со средой виртуальной реальности для отображения информации пользователю и клавиатуру, и указательное устройство, например, мышь или трекбол, с помощью которых пользователь может осуществлять ввод данных в компьютер. Другие виды устройств также могут использоваться для предоставления взаимодействия с пользователем; например, обратная связь, предоставляемая пользователю, может представлять собой любую форму сенсорной обратной связи, например, визуальную обратную связь, слуховую обратную связь или тактильную обратную связь; и ввод данных от пользователя может быть принят в любой форме, включая акустический, речевой или тактильный ввод данных.
[00157] На Фигуре 7А показан иллюстративный пример варианта осуществления по настоящему изобретению конструктивного чертежа и маркировочного материала 702. Помещение маркировочного материала 704 может облегчить создание карты целевого материала. Например, целевой материал может не содержать достаточное количество отличительных меток. Добавление отличительных меток (например, стикеров, меток, сделанных чернилами, карандашом) к целевому материалу может облегчить системе 680 создание карты целевого материала и отслеживание позиционирования режущего инструмента во время процесса резания. В этом примере, конструктивный чертеж представлен в форме страны. Маркировочный материал может быть помещен на поверхности целевого материала для облегчения создания карты целевого материала и отслеживания положения, и корректировки положения в соответствии с конструкцией.
[00158] На Фигуре 7В показан иллюстративный пример варианта осуществления по настоящему изобретению местоположения маркеров 706. Маркеры местоположения 706 могут быть включены как часть конструктивного чертежа, или они могут относиться к типу маркировочного материала 702, используемого для формирования конструктивного чертежа. Маркеры местоположения 706 могут быть помещены на целевом материале и использоваться системой 680 для создания карты целевого материала и отслеживания положения режущего инструмента относительно поверхности материала.
[00159] Маркеры местоположения 706 могут быть спроектированы, сконструированы или выполнены таким образом, чтобы их легко могла определить и считать (например, посредством камеры или датчика 682) система 680. Например, маркеры местоположения 706 могут включать домино, которое представляет собой бинаризованное изображение. Бинаризованное изображение может включать изображение с двумя значениями, например, двухцветное изображение. В некоторых вариантах осуществления настоящего изобретения, два цвета могут быть выбраны таким образом, чтобы первый цвет из двух цветов контрастировал со вторым цветом из двух цветов. Например, два цвета могут включать белый и черный, красный и белый, оранжевый и голубой, зеленый и фиолетовый и так далее. Маркеры местоположения на основе домино 706 могут легко и быстро считываться системой 680. Используя маркеры местоположения 706 с предварительно заданным количеством признаков (например, массив двоичных данных 710), маркеры местоположения 706 могут быть быстро считаны из контура дерева бинаризованного изображения. Кроме того, каждое домино может включать такое количество, которое облегчает отслеживание множества домино. Кроме того, система 680 может легко устанавливать точность изображения до фрагментов пикселя для каждого круга 710. В некоторых вариантах осуществления настоящего изображения, угловые круги (например, 710) могут присутствовать в каждом из множества домино 706. Наличие углового круга 710, присутствующего в каждом из домино, облегчает считывание маркеров местоположения 706, и это может позволить системе 680 считывать маркеры местоположения на увеличенных расстояниях, потому что имеется одинаковый размер признаков. Наличие признаков с одинаковым размером предотвращает исчезновение подмножества признаков из бинаризованного изображения до того, как исчезнут все признаки. Например, если все признаки 710 имеют одинаковый размер, то система 680 может либо определить все признаки, либо не определить ни один из признаков, если маркер местоположения 708 находится вне диапазона определения.
[00160] В некоторых вариантах осуществления настоящего изобретения, маркеры местоположения 706 могут включать фидуциальный маркер 708. Фидуциальный маркер может относиться к маркеру, который может быть определен системой 680 с минимальной вычислительной мощностью. В некоторых вариантах осуществления настоящего изобретения, система 680 может определять маркеры местоположения 700 непосредственно из входных данных, которые представляют собой черно-белое изображение (возможно, в виде бинаризации изображения, имеющего большее количество данных, например, оттенки серого или полноцветный формат).
[00161] В некоторых вариантах осуществления настоящего изобретения, система 680 может определять местоположение маркеров 706, используя контур дерева бинаризованного изображения. Контур дерево может относиться к дереву массива двоичных данных. Массив двоичных данных может относиться к области одного и того же цвета. Контур может относиться к границе массива двоичных данных или включать их, или область одного и того же цвета. Двоичные объекты данных могут иметь форму, например, круг, квадрат, треугольник, многоугольник, овал, эллипс, прямоугольник, пятиугольник, контур или другую форму, которая позволяет системе 680 определять маркер местоположения.
[00162] В некоторых вариантах осуществления настоящего изобретения, массив двоичных данных может быть организован в виде дерева таким образом, что каждый узел в дереве будет соответствовать массиву двоичных данных. Кроме того, узел может быть дочерним элементом другого узла, если дочерний массив двоичных данных охватывается родительским массивом двоичных данных. Например, на изображении заглавной буквы «В» присутствуют четыре массива двоичных данных: белый фон, черная буква и два белых массива двоичных данных внутренних частей буквы «В». Они организованы в дереве таким образом, что буква представляет собой дочерний элемент фона, а два внутренних массива двоичных данных являются дочерними элементами буквы.
[00163] В некоторых вариантах осуществления настоящего изобретения, маркеры местоположения могут включать домино, как продемонстрировано на Фигуре 7В. На Фигуре 7В продемонстрированы прямоугольные домино, но могут быть использованы и другие маркеры с узорами или другие формы массивов двоичных данных. Например, вместо прямоугольного маркера 708, маркер может представлять собой многоугольник, круг, эллипс, квадрат, треугольник, пятиугольник и так далее. Массивы двоичных данных 710 могут представлять собой круги или иметь другие формы. Совокупность или множество маркеров могут упоминаться как сцена 706 или множество маркеров 706, или множество потенциальных маркеров местоположения 706. Маркер 708 может быть потенциальным маркером, потому что система 680 может выполнить первоначальную обработку, чтобы идентифицировать изображение и установить, является ли изображение маркером местоположения на основании определения порогового значения или удовлетворения критериям (например, присутствуют ли массивы двоичных данных в предварительно заданных местоположениях, имеется ли узор или другая подпись, которая указывает на то, что изображение соответствует маркеру местоположения 708).
[00164] Маркеры местоположения могут включать, по меньшей мере, одну строку 712, включая, по меньшей мере, один маркер 708; и, по меньшей мере, один столбец 714, включая, по меньшей мере, один маркер 708. В некоторых вариантах осуществления настоящего изобретения, множество маркеров местоположения 706 или сцена 706 могут быть симметричными (например, одинаковое количество строк и столбцов). В некоторых вариантах осуществления настоящего изобретения, множество маркеров местоположения 706 или сцена 706 могут быть не симметричными (например, различное количество строк и столбцов).
[00165] Каждый из домино 706 может включать узнаваемую подпись в контуре дерева. Например, домино может включать 10 белых массивов двоичных данных внутри черного массива двоичных данных. Белые массивы двоичных данных могут не иметь дочерних элементов массивов двоичных данных. Конфигурация домино может включать контур дерева с десятью белыми дочерними элементами, которые представляют собой листья дерева с черным фоном. Следовательно, если система 680 определит эту конфигурацию (например, черный массив двоичных данных с 10 белыми массивами двоичных данных), то система 680 может принять черный массив двоичных данных и обработать его в качестве фидуциального маркера. Эта дополнительная обработка может закончиться отклонением домино в качестве маркера или принятием домино в качестве маркера местоположения. Эта возможность распространяется на любую распознаваемую подпись в контуре дерева, который может включать переменное количество дочерних массивов двоичных данных, при условии, что она в достаточной степени различима, что позволяет с высокой вероятностью прямо по контурам признать ее маркером и привлечь дополнительные вычислительные ресурсы, чтобы изучить ее тщательнее.
[00166] Таким образом, система 680 может быть выполнена с возможностью выполнения первоначальной оценки определенного изображения с использованием метода первоначальной обработки изображения. Во время использования метода первоначальной обработки, система 680 идентифицирует контур дерева для того, чтобы определить, соответствует или удовлетворяет ли контур дерева первоначальному экранированию. Например, если система 680 определяет черный массив двоичных данных и 10 белых массивов двоичных данных (например, как показано в домино 708), то система 680 может установить, что изображение может включать маркер местоположения, и она может переслать изображение для дальнейшей обработки. Выполняя первоначальную оценку, система 680 может предварительно просматривать изображения и выбирать подмножество изображений для дальнейшей более интенсивной обработки вычислительным устройством. Таким образом, система 680 может повысить эффективность и уменьшить объем вычислительных ресурсов, используемых для установления местоположения инструмента относительно рабочей поверхности.
[00167] В некоторых вариантах осуществления настоящего изобретения, маркер может быть определен очень быстро путем преобразования в двоичную форму входного изображения, вычисления контура/массива двоичных данных дерева или поиска известной подписи. В некоторых вариантах осуществления настоящего изобретения, преобразование в двоичную форму изображения может относиться к преобразованию изображения в черный и белый цвета. В некоторых вариантах осуществления настоящего изобретения, маркер местоположения может кодировать данные в каждую фидуциальную точку (например, 708), и его можно легко определить. Например, фидуциальный маркер 708 может кодировать количество, что позволяет системе 680 отслеживать (управлять, администрировать, идентифицировать или устанавливать) множество фидуциальных точек, присутствующих в сцене (например, сцена может относиться к маркерам местоположения 706). Количество фидуциальных точек 708 может быть уникальным в сцене 706, или оно может быть не уникальными в сцене 706. В некоторых вариантах осуществления настоящего изобретения, маркер, такой как, каждое из домино 708, включает узор белых массивов двоичных данных, который кодирует количество в двоичном виде.
[00168] В некоторых вариантах осуществления настоящего изобретения, маркер 708 может включать массивы двоичных данных (например, 710), которые расположены в предварительно заданном местоположении. Маркер 708 может включать массивы двоичных данных в каждом из четырех углов, что позволяет системе 680 установить не только наличие фидуциального маркера 708, но и схему расположения для него (например, положение и ориентацию маркера относительно камеры 682). Включение массивов двоичных данных в предварительно заданные положения может улучшить способность системы 680 декодировать сообщение, закодированное в самом маркере. Например, если массивы двоичных данных расположены в сетке, то распознавание углов предоставляет схему расположения сетки и позволяет системе 680 создать карту каждого квадрата сетки до 1 или 0 в отношении массива двоичных данных, присутствующего или отсутствующего. В некоторых вариантах осуществления настоящего изобретения, система 680 может использовать массивы двоичных данных в предварительно заданном местоположении маркера для того, чтобы определить схему расположения домино или маркера 708, но затем проанализировать некоторые закодированные данные другим способом, которые могут быть или не могут быть закодированными в бинаризованном изображении/контуре дерева.
[00169] В некоторых вариантах осуществления настоящего изобретения, маркер 708 может включать массивы двоичных данных, которые представляют собой фигуры, которые затем могут быть разрешены с точностью изображения до фрагментов пикселя, путем возвращения к полноцветному (или оттенкам серого) изображению. Например, система 680 может идентифицировать массивы двоичных данных как круги (или она может быть предварительно выполнена с возможностью идентификации массивов двоичных данных как круги). Система 680 может устанавливать ограничивающий блок каждого массива двоичных данных в бинаризованном изображении. Затем система 680 может использовать соответствующие пиксели с оттенками серого в изображении с оттенками серого, чтобы подогнать эллипс (круг в виде в перспективе) к размерам пикселя, обеспечивая точность изображения до фрагментов пикселя. Система 680 может более точно определить положение и ориентацию фидуциальной точки 708 относительно камеры, используя эти определения с точностью изображения до фрагментов пикселя. Затем это положение и ориентация могут быть переданы в систему 680 для дальнейшей обработки, например, для локализации камеры в трехмерном пространстве.
[00170] На Фигурах 8А-8В показаны системы, способы и устройство для направления и извлечения пыли. Извлечение пыли может относиться к удалению частиц материала, которые были удалены с объемной заготовки (с поверхности материала, рабочей поверхности) во время процесса обработки, такого как фрезерование, маршрутизация, шлифование и так далее. В области деревообработки пыль может представлять собой опилки. Эффективное извлечение пыли способствует поддержанию чистой рабочей среды, безопасного для дыхания воздуха, свободного от пыли, и предотвращает отложение пыли вблизи инструмента, которая, в противном случае, может препятствовать ему в осуществлении резания, а также может привести к генерации избыточного тепла. Кроме того, накопление древесной пыли может создать риск взрыва. Кроме того, для инструментов с автоматическим управлением (таких как система 680), которые используют оптический способ для локализации (например, камера 682), пыль может мешать способности инструмента устанавливать местоположение инструмента относительно поверхности материала. Системы, способы и устройство по настоящему изобретению эффективно удаляют пыль из рабочей области инструмента. В некоторых вариантах осуществления настоящего изобретения, пыль может направляться в сторону от рабочей области при управляемом направлении в отсутствии вакуумной установки.
[00171] На Фигуре 8А продемонстрирован инструмент 800, выполненный с возможностью направления и удаления пыли в соответствии с вариантом осуществления настоящего изобретения. Инструмент 800 включает вращающийся резак 1 (или острие инструмента или режущий элемент, или рабочий элемент), который режет материал 2, когда вращающийся резак 1 перемещается в осевом, боковом направлении или в комбинации этих направлений по материалу 2. Инструмент 800 включает корпус инструмента 3. Корпус инструмента 3 может включать полость, сформированную из кармана корпуса инструмента 3. Полость 3 может быть дополнительно сформирована пространством 4, где участки рабочего материала 2 были удалены или вырезаны. Режущий элемент, наконечник маршрутизатора или острие инструмента могут проходить через полость 3. Полость 3 может сформировать, по меньшей мере, один канал или участок канала. Канал направляет поток воздуха 6. Каналы также продемонстрированы на Фигурах 9А-9В. Инструмент может включать камеру 10, которая может включать, по меньшей мере, одну функциональность камеры 682. Камера 10 может включать или упоминаться как датчик, например, датчик изображения, инфракрасный датчик, или лазерный датчик. В этом варианте осуществления настоящего изобретения, рабочее перемещение вращающегося резака 1 закручивается вдоль оси вращающегося резака 1.
[00172] В некоторых вариантах осуществления настоящего изобретения, движущая сила вращения для вращающегося резака 1 может быть сгенерирована маршрутизатором 5 или шпинделем 5 (например, маршрутизатором для обработки древесины или металлорежущим инструментом, или режущим инструментом, предназначенным для пластика, и так далее), который включает встроенный вентилятор 802. Вентилятор 802 может представлять собой отдельный вентилятор, который встроен в шпиндель 5, или вентилятор 802 может относиться к воздушному потоку, который генерируется как побочный продукт шпинделя 5, вращающего режущий инструмент 1. В некоторых вариантах осуществления настоящего изобретения, вентилятор 802 может находиться с внешней стороны инструмента, например, с внешней стороны шпинделя 5. Вентилятор 802 может включать, по меньшей мере, одну лопасть или лопатку, которая при вращении генерирует воздушный поток. Этот вентилятор 802 может генерировать нисходящий воздушный поток 6, который вытесняет пыль из коллекторной полости, сформированной корпусом инструмента 3 и пространством 4, и вдоль каналов, находящихся в пластине основания 7. Эти каналы направляют пыль к передней части инструмента 8, что предотвращает накопление пыли в задней части инструмента 9, куда может быть направлена оптическая система определения местоположения 10 (например, камера 682). В некоторых вариантах осуществления настоящего изобретения, передняя часть 8 инструмента 800 может относиться к участку инструмента, который обращен в сторону, противоположную направлению, в котором инструмент режет, или участку инструмента, расположенному ближе к пользователю инструмента. В некоторых вариантах осуществления настоящего изобретения, задняя часть 9 инструмента 800 может относиться к участку инструмента, который обращен в сторону направления, в котором инструмент режет, или участка инструмента, расположенного дальше от пользователя инструмента. В некоторых вариантах осуществления настоящего изобретения, задняя часть 9 инструмента относится к участку инструмента 800, на который направлена камера 10. Инструмент 800 может включать вакуумный порт 11, который открывается в один из каналов, сформированных карманами 3 и 4, который принимает воздушный поток 6.
[00173] На Фигуре 8В продемонстрирован вариант осуществления по настоящему изобретению инструмента 801, аналогичного инструменту 800, который включает вакуумную установку 12, прикрепленную к вакуумному порту 11. Вакуумная установка 12 смещает воздушный поток к вакуумной установке 13. Благодаря этому, извлечение может произойти посредством подсоединенного канала, сформированного карманами 3 и 4 в пластине основания 7, и в вакуумную установку 12. В этой конфигурации пыль может быть эффективно удалена из инструмента без попадания в окружающую среду (например, задняя часть инструмента 9).
[00174] Канал, сформированный полостями 3 и 4, позволяет воздушному потоку 6, сгенерированному вентилятором 802 шпинделя инструмента 5, и воздушному потоку, сгенерированному вакуумной установкой 12, проходить по общей траектории для удаления пыли. Таким образом, предоставляется система эффективного извлечения пыли, поскольку вакуумная установка 12 не борется с воздушным потоком, сгенерированным встроенным в шпиндель вентилятором 802.
[00175] На Фигуре 9А продемонстрирован вид сверху-вниз в перспективе устройства 900 для направления и извлечения пыли. Устройство 900 может быть соединено, являться частью или быть сформировано, по меньшей мере, из одного компонента систем или устройства 800 или 801. В некоторых вариантах осуществления настоящего изобретения, устройство 900 включает пластину основания 7 инструмента 800. Пластина основания 7 включает каналы 904a-b, сформированные карманом или полостью 3 в пластине основания 7. Участок пластины основания 7 обращен к материалу 2 или находится напротив него. Вентилятор 802 генерирует воздушный поток 6, который течет вниз к материалу 2. Вакуумная установка 12 генерирует воздушный поток 13 в направлении вакуумной установки 12 и вакуумного порта 11. Направление воздушного потока 6, когда он направляется к материалу 2, обозначено X, а воздушный поток 13, показанный направляющимся к вакуумному порту 11, обозначен точкой в круге.
[00176] В некоторых вариантах осуществления настоящего изобретения, каналы 904a-b, сформированные в пластине основания 7, имеют V-образную форму. В некоторых вариантах осуществления настоящего изобретения, могут быть предусмотрены два канала 904а и 904b, которые продвигаются от полости 3. В некоторых вариантах осуществления настоящего изобретения, может быть предусмотрен один канал (например, просто канал 904а). В некоторых вариантах осуществления настоящего изобретения, может быть предусмотрено множество каналов (например, по меньшей мере, два канала). Один из множества каналов может включать вакуумный порт 11, соединенный с вакуумной установкой 12. Каналы 904а и 904b могут формировать U-образную форму. Каналы 804 могут включать третий канал, который продвигается перпендикулярно каналам 904а и 904b через полость 3.
[00177] Каналы 904а и 904b могут формировать угол 906. Диапазон угла 806 может составлять от 1 до 180 градусов. В некоторых вариантах осуществления настоящего изобретения, угол 906 может составлять 90 градусов, 45 градусов, 60 градусов, 120 градусов и так далее. Угол 906 может быть выбран таким образом, чтобы пыль из материала 2 направлялась эффективным образом от задней части 9 инструмента к передней части 8 инструмента через канал 904a-b и воздушный поток 6 и 13.
[00178] Каналы 904a-b могут включать глубину канала. Глубина канала может быть одинаковой для канала 904а и канала 904b, или она может быть разной у разных каналов. Глубина канала может быть больше нуля. Глубина канала может иметь значение в диапазонах от 0,02 дюйма до 2 дюймов. Глубина может быть меньше или больше, в зависимости от типа инструмента или типа разрезаемого материала. Например, размер направляемых или извлекаемых частиц может устанавливать глубину канала (например, более мелкая глубина канала для более мелких частиц и более глубокие каналы для более крупных частиц).
[00179] В некоторых вариантах осуществления настоящего изобретения, первый компонент воздушного потока 6 и 13, сгенерированного вентилятором 802, может быть больше, чем второй компонент воздушного потока 6 и 13, сгенерированного вакуумной установкой 12. В некоторых вариантах осуществления настоящего изобретения, первый компонент воздушного потока 6 и 13, сгенерированного вентилятором 802, может быть меньше или равен второму компоненту воздушного потока 6 и 13, сгенерированного вакуумной установкой 12.
[00180] В некоторых вариантах осуществления настоящего изобретения, воздушный поток, сгенерированный вакуумной установкой 12, может быть установлен по тому факту, что воздушный поток удерживает инструмент 800 (или устройство 900) перед материалом 2. Благодаря этому, может увеличиться трение между участком инструмента, касающимся материала, что может увеличить стабильность при резании или выполнении задачи на материале 2.
[00181] На Фигуре 9В продемонстрировано устройство 902 для направления или извлечения пыли из задней части 9 инструмента. На Фигуре 9В продемонстрирован вид сверху-вниз в перспективе устройства 902 или пластины основания 7, включая каналы 904a-b. Устройство 902 может быть аналогично устройству 900 или включать, по меньшей мере, один его компонент. В некоторых вариантах осуществления настоящего изобретения, устройство 902 включает вакуумный порт 11, но оно не соединено с вакуумной установкой (например, как показано в устройстве 900). Хотя устройство 902 может быть не соединено с вакуумной установкой в вакуумном порте 11, устройство 902 может по-прежнему направлять и извлекать пыль через каналы 804 и воздушный поток 6, сгенерированный вентилятором (например, вентилятором 802).
[00182] Вакуумный порт 11 может быть расположен в любом месте вдоль канала 904а или канала 904b. В некоторых вариантах осуществления настоящего изобретения, вакуумный порт 11 может быть расположен ближе к краю или углу пластины основания 900 относительно полости 3. Расстояние 908 между вакуумным портом 11 и краем пластины основания 902 может быть больше нуля. Расстояние 910 между вакуумным портом 11 и полостью 3 может быть больше нуля. Расстояние 910 может отличаться от расстояния 908. Расстояние 910 может быть больше расстояния 908. Расстояние 910 может быть кратно расстоянию 908. Расстояния 908 и 910 могут быть установлены таким образом, чтобы пыль могла быть эффективным и рациональным образом направлена и извлечена из задней части 9 инструмента.
[00183] На Фигуре 9С продемонстрирован нижний вид в перспективе пластины основания 910. Пластина основания 910 может соответствовать пластине основания 7. Пластина основания 910 включает каналы 912a-b, которые могут соответствовать каналам 904a-b. Пластина основания 910 включает полость 916, которая может соответствовать полости 3. Пластина основания 910 включает вакуумный порт 914 в канале 912, который может соответствовать вакуумному порту 11. Вакуумный порт 914 может или не может быть подключен к вакуумной установке.
[00184] Пластина основания 910 может быть изготовлена из любого материала, который облегчает работу системы 680 или инструмента 800. Материал может представлять собой металл, пластик, сплав или другой материал, который предоставляет адекватную структурную поддержку инструменту 800 и трение, позволяющее инструменту скользить по поверхности, предоставляя некоторую стабильность.
[00185] Фигура 9D представляет собой вид сверху-вниз в перспективе пластины основания 920, которая может соответствовать варианту осуществления по настоящему изобретению пластины основания 902 Фигуры 9В. Пластина основания 920 включает полость 922, через которую может проходить режущий элемент, или может продвигаться острие инструмента. Пластина основания 920 может включать вакуумный порт 924.
[00186] Пластина основания 920 может включать каналы на нижней части пластины основания 920 (например, участок или сторону пластины основания, расположенную напротив материала, на котором должна быть выполнена задача). Пластина основания 920 может включать дополнительные отверстия или полости, или канавки, по меньшей мере, для одного винта или соединительного механизма, используемого для соединения пластины основания 920 с инструментом, например, с инструментом 800.
[00187] В некоторых вариантах осуществления настоящего изобретения, участок воздушного потока, сгенерированного вентилятором, участок воздушного потока, сгенерированного двигателем, приводящим в действие рабочий элемент, или участок воздушного потока, сгенерированного вакуумной установкой, может быть направлен на охлаждение, по меньшей мере, одного электрического компонента (например, источника питания, радиатора) инструмента (например, инструмента 800).
[00188] На Фигуре 10А показаны система, способ и устройство для установления положения острия инструмента относительно рабочей поверхности или материала. Система, способ и устройство могут калибровать определение положения для инструмента. В некоторых вариантах осуществления настоящего изобретения, система 680 может быть выполнена, спроектирована или сконструирована для установления положения острия инструмента относительно рабочей поверхности. Система 1000 (или инструмент 1000) может перемещать, позиционировать или управлять перемещением острия инструмента 24, по меньшей мере, в одном направлении (например, на Фигуре 10В показано острие инструмента 24, касающееся поверхности материала 2). Управление может осуществляться вручную или автоматически. В некоторых вариантах осуществления настоящего изобретения, инструмент 1000 может включать или быть выполнен с автоматическим управлением высотой вращающегося резака 24 относительно поверхности заготовки или материала 2. Система 1000 может включать, по меньшей мере, одну функцию или компонент системы или устройства Фигур 1-9 и 11А-11В.
[00189] Система 1000 (или инструмент 1000) может калибровать определение положения для инструмента. Система 1000 может включать основание 18, соединенное с инструментом 1000. Основание 18 может находиться в контакте с рабочей поверхностью 2. В некоторых случаях, основание 18 может включать подкладку 22. Например, основание 18 может включать подкладку 22, в результате чего основание 18 находится в контакте с рабочей поверхностью 2 через подкладку 22. Таким образом, и в некоторых вариантах осуществления настоящего изобретения, основание 18 может относиться к основанию 18 и подкладке 22. В некоторых вариантах осуществления настоящего изобретения, основание 18 может не находиться в контакте с рабочей поверхностью. Основание 18 может находиться в контакте с датчиками 23, которые находятся в контакте с подкладкой 22, и подкладка 22 может находиться в контакте с рабочей поверхностью или заготовкой, или материалом 2.
[00190] Система 1000 может включать, по меньшей мере, одно вычислительное устройство, имеющее, по меньшей мере, один процессор. В некоторых случаях, система 1000 может включать, по меньшей мере, одно вычислительное устройство, находящееся на удалении от инструмента. Например, инструмент может включать интерфейс беспроводной или проводной связи, который может передавать и принимать данные или информацию об управлении, по меньшей мере, от одного вычислительного устройства, находящегося на удалении от инструмента.
[00191] Система 1000 может включать, по меньшей мере, один датчик 23, соединенный с возможностью связи с вычислительным устройством. Система 1000 может включать двигатель 19, управляемый вычислительным устройством, для того, чтобы острие инструмента 24 могло продвигаться и втягиваться по направлению к рабочей поверхности 2 и от нее. Двигатель 19 может управлять или включать, или относиться, по меньшей мере, к одному компоненту системы 1000, выполненному с возможностью, позволяющей продвигаться или втягиваться острию инструмента 24, включая, например, подвижную каретку 15.
[00192] Система 1000 может идентифицировать, посредством, по меньшей мере, одного датчика 23, первое значение параметра, указывающего на величину силы, с которой участок основания воздействует на рабочую поверхность. Например, датчик 23 может включать датчик силы 23. Система 1000 может устанавливать первое значение в качестве первого значения силы, которое указывает значение по умолчанию или первоначальную силу, с которой основание 23 воздействует на материал 2. Оно может указывать на вес инструмента. Сила может быть измерена или установлена в ньютонах или фунтах. Датчик 23 может неоднократно определять или измерять значение параметра на основании временного интервала (например, каждые 0,1 секунды, 0,5 секунды, 1 секунду, 2 секунды, 3 секунды, 5 секунд или на основании какого-либо другого временного интервала). Датчик 23 может сравнивать первое значение или первое измерение со вторым значением или последующим измерением. Датчик 23 может неоднократно сравнивать измерение с последующим измерением до тех пор, пока датчик не определит изменение или разницу (например, на 0,5%, 1%, 2%, 3% или абсолютное изменение, такое как 1 N, 0,5 N, 0,25 N, 0,1N, 0,05N или 2N) между измерениями. Разница может относиться к разнице по предварительно заданному пороговому значению. Пороговое значение может быть фиксированным или динамическим. Пороговое значение может основываться на разрешении датчика 23.
[00193] Система 1000 может отдать команду двигателю 19 продвинуть рабочий элемент или острие 24 по направлению к рабочей поверхности 2. Далее, система 1000 может идентифицировать, посредством датчика 23, установленного на рабочем элементе 24, который контактирует с рабочей поверхностью 2, второе значение параметра. Это второе значение может быть вторым значением силы. Второе значение силы может быть меньше первого значения силы, установленной датчиком 23, когда острие инструмента 24 не находилось в контакте с рабочей поверхностью. В некоторых случаях, могут присутствовать несколько датчиков 23, и каждый датчик может установить первое значение силы и второе значение силы. В некоторых случаях, первый датчик может установить первое значение силы, которое отличается от первого значения силы, определенного вторым датчиком. Первые значения могут относиться к тому моменту, когда острие инструмента не находится в контакте с материалом 2. Первый и второй датчики могут идентифицировать различные первые значения из-за того, что центр тяжести инструмента расположен неравномерно между первым и вторым датчиками. Таким образом, когда острие инструмента 24 входит в контакт с материалом 2, второе значение силы, определенное первым датчиком, может отличаться от второго значения силы, определенного вторым датчиком. Например, когда острие инструмента 24 входит в контакт с материалом 2, основание 18 инструмента может наклоняться под углом (например, в 1 градус, 2 градуса, 5 градусов или 10 градусов). Наклон основания 18 может заставить первый датчик 22 измерить второе значение силы, которое меньше первого значения силы, измеренного первым датчиком 22, тогда как второй датчик 22 может измерить второе значение силы, которое больше первого значения силы, измеренного вторым датчиком.
[00194] Система 1000 (или вычислительное устройство) может идентифицировать первое значение параметра по участку основания 18 инструмента, находящегося в контакте с рабочей поверхностью 2. Система 1000 может идентифицировать, посредством датчика 23, второе значение параметра по участку основания инструмента, не находящегося в контакте (например, частично находящегося в контакте или воздействующего на поверхность с меньшей силой, по сравнению с предыдущим воздействием силы) с рабочей поверхностью, реагируя на двигатель 19, заставляющий рабочий элемент 24 входить в контакт с рабочей поверхностью 2. Например, термин «не находящийся в контакте» может относиться или включать меньшую силу, с которой участок воздействует на основание 18. В некоторых случаях, система 1000 может отдать команду двигателю 19 войти в контакт с рабочей поверхностью 2 для наклона, по меньшей мере, участка основания 18. Наклон основания 18 может относиться к распределению силы, с которым воздействует основание 18, таким образом, что первый участок основания 18 оказывает большую силу на материал 2, чем второй участок основания 18. Термин «наклон основания» 18 может относиться к изменению распределения силы, с которой воздействуют участки основания 18. Система 1000 может устанавливать положение оси z рабочего элемента 24 относительно рабочей поверхности 2, реагируя на то, что рабочий элемент 24 наклоняет основание 18 инструмента, реагируя на то, что рабочий элемент 24 контактирует с рабочей поверхностью 2.
[00195] Система 1000 может сравнивать первое значение параметра со вторым значением параметра, чтобы сгенерировать разницу между первым значением и вторым значением. Система 1000 может устанавливать абсолютную разницу (например, разницу величины силы), или просто устанавливать факт разницы, которая состоит в том, что два значения не равны друг другу. Система 1000 может установить, что если первое и второе значения для конкретного датчика 22 не равны, то это происходит из-за того, что острие инструмента 24 контактирует с материалом 24 и смещает или распределяет силу, с которой основание 18 воздействует на материал 2. Система 1000 может устанавливать положение оси z, реагируя на тот факт, что первое значение силы - больше второго значения силы, потому что основание 18 может воздействовать с меньшей силой на материал 2.
[00196] Реагируя на определение этой разницы, система 1000 может установить, что острие инструмента 24 входило в контакт с материалом, и использовать эту информацию для установления положения оси z рабочего элемента относительно рабочей поверхности. Например, система 1000 может установить, что это - базовая линия или положение по умолчанию для острия инструмента 24. Система 1000 может калибровать положение острия инструмента 24 таким образом, что оно является нулевым положением. Поскольку система 1000 втягивает острие инструмента 24 из материала, то система 1000 может наблюдать или отслеживать расстояние острия инструмента 24 от откалиброванного нулевого положения, соответствующего поверхности материала 2. Например, система 1000 может управлять или отдать команду двигателю 19 втянуть или переместить острие инструмента 24 на некоторое расстояние (например, на 1 миллиметр, 5 миллиметров, 1 сантиметр, 5 сантиметров или 10 сантиметров) от откалиброванного нулевого положения, которое может соответствовать поверхности материала. Система 1000 может, в некоторых случаях, отдать команду или управлять двигателем 19 для того, чтобы вставить острие инструмента 24 на некоторое расстояние в материал 2. Например, система 1000 может отдать команду или управлять двигателем 19 для того, чтобы вставить острие инструмента 24 на один сантиметр вне пределов откалиброванного нулевого положения, в результате чего она может вставить острие инструмента 24 на один сантиметр в материал 2. Например, система 1000 может сделать отверстие в материале размером один сантиметр, используя откалиброванное нулевое положение.
[00197] Система 1000 может отдать команду двигателю 19 втянуть рабочий элемент 24, находящийся в контакте с рабочей поверхностью 2, с рабочей поверхности 2. Система 1000 (или ее датчик 23) может идентифицировать, когда рабочий элемент 24 не находится в контакте с рабочей поверхностью путем измерения третьего значения параметра. Третье значение параметра может быть больше значения второго параметра, потому что острие инструмента 24 больше не смещает силу, с которой основание 18 воздействует на материал 2 (например, посредством датчика 23 или подкладки 22). Третье значение параметра может быть равным (например, по существу, равным в пределах 1%, 2%, 5% или 10%) первому значению параметра, когда острие инструмента 24 также не находилось в контакте с материалом 2. Система 1000 может устанавливать второе положение по оси z рабочего элемента относительно рабочей поверхности, реагируя на вторую разницу между первым значением и третьим значением, которая меньше порогового значения (например, разница - меньше, чем процент от первого значения или третьего значения, такого как 1%, 2%, 3%, 5% или 10%, или от значения силы, например, 1 ньютон, 0,5 ньютона, 0,01 ньютона, 2 ньютона, 5 ньютонов или 10 ньютонов).
[00198] Таким образом, чтобы облегчить управление высотой вращающегося резака 24, инструмент может устанавливать ориентирную или «нулевую» точку для того, чтобы инструмент 1000 (например, посредством режущего элемента 24) мог быть расположен таким образом, чтобы можно было удалить некоторое количество материала 2. Например, инструмент 1000 может погружать вращающийся резак 24 на заданную глубину в заготовку 2, перед тем, как перемещать ее в боковом направлении так, чтобы создать канавку. Инструмент может использовать один способ для точного установления положения острия инструмента относительно рабочей поверхности. В некоторых вариантах осуществления настоящего изобретения, инструмент 1000 использует недорогие датчики 23, например, датчики силы, которые определяют дельту или изменение силы, с которой участок инструмента 1000 воздействует на материал 2. В некоторых случаях, датчики 23 могут включать емкостные датчики, фотоэлектрические датчики, электромагнитные датчики, датчики нагрузки, тензометрические датчики нагрузки, пьезоэлектрические кристаллы, гидравлические датчики нагрузки или пневматические датчики нагрузки.
[00199] Когда острие 24 движется к материалу 2 и касается материала 2, то сила, с которой воздействует основание 18, может быть уменьшена, поскольку сила сбрасывается на острие инструмента 24. Определение этого изменения силы может указывать на то, что острие инструмента касается поверхности материала 2 и позволяет инструменту создавать конфигурацию или устанавливать, или инициализировать это положение как нулевое положение. Это может быть целесообразно для ручных инструментов с силовым приводом, включая автоматически направляемые инструменты, а также может применяться для полностью автоматических металлорежущих инструментов.
[00200] В некоторых вариантах осуществления настоящего изобретения, инструмент 1000 включает наконечник маршрутизатора 1, вмонтированный в шпиндель 14 маршрутизатора 5 (например, маршрутизатор для обработки древесины). Маршрутизатор 5 может быть закреплен в подвижной каретке 15, которая скользит по направляющему полозку 16. Направляющий полозок 16 может быть вмонтирован в несущую колонну 17. Несущая колонна 17 может быть прикреплена к основанию 18 инструмента 1000. Двигатель 19 может быть прикреплен к основанию 18 инструмента 1000 для вращения ходового винта 20. Ходовой винт 20 может проходить через гайку 21 на подвижной каретке 15. Ходовой винт 20 может включать прямоугольную резьбу, трапецеидальную резьбу или пилообразную резьбу. Когда двигатель 19 вращается, подвижная каретка 15 перемещается пропорционально шагу ходового винта 20.
[00201] В некоторых вариантах осуществления настоящего изобретения, подвижная каретка 15 может быть вмонтирована в подвижную платформу, которая ограничена корпусом в направлении Z. В некоторых вариантах осуществления настоящего изобретения, колонна Z или направляющий полозок 16 могут быть вмонтированы в подвижную платформу XY, которая ограничена в направлении Z корпусом устройства 1000. Например, инструмент или устройство 1000 может включать установку или корпус с платформой, который может быть расположен на поверхности куска материала, например, древесины. Инструмент может быть соединен с корпусом посредством электричества и механическим способом, а корпус вместе с инструментом можно перемещать над материалом. Инструмент может перемещать (или предоставлять пользователю команды по перемещению) корпус, платформу или инструмент на желаемые координаты XY или Z на материале. Например, инструмент может включать, по меньшей мере, один компонент (например, установку, инструмент, платформу и так далее) системы, описанной в Опубликованной патентной заявке США №2015/0094836. Опубликованная патентная заявка США №2015/0094836 полностью включена в настоящий документ посредством ссылки.
[00202] В некоторых вариантах осуществления настоящего изобретения, инструмент 1000 может использовать, по меньшей мере, одну другую конфигурацию или метод для перемещения острия 24 инструмента 1000 относительно рабочей поверхности. Другие конфигурации могут включать винт мощности, переводной винт, шариковые винты, роликовые винты, гидравлическое питание, переменную трансмиссию, червячные приводы, реечные приводы, электромагнитную активацию, пьезоэлектрическую активацию, гидравлические подъемники, электрические подъемники, поворотный подъемник, пневматический подъемник, механические подъемники, рычаги, шестерни и так далее.
[00203] Основание 18 инструмента (или устройства) 1000 может быть отделено от рабочей поверхности 2 подкладкой 22, на которую опирается устройство 1000. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один датчик силы 23 может быть расположен между подкладкой 22 и основанием 18 устройства 1000. Гравитационная сила, сгенерированная весом устройства 1000, частично или полностью проходит через, по меньшей мере, один датчик силы 23, когда устройство 1000 опирается на рабочую поверхность 2.
[00204] Для размещения острия 24 режущего инструмента 1000, система или устройство 1000 может переместить каретку 15 ближе к рабочей поверхности 2, которая перемещает острие 24 к рабочей поверхности. После выполнения этого перемещения, сила, проходящая через датчики силы 23, может быть измерена (например, измерена, реагируя на перемещение, измеряема периодически, измерена на основании временного интервала, например, каждой миллисекунды, 10 миллисекунд, 1 секунды и так далее). Как только острие 24 режущего инструмента вступает в контакт с рабочей поверхностью 2, дополнительное перемещение приводит к тому, что часть веса устройства 1000 будет передаваться на рабочую поверхность 2 через острие инструмента 24, а сила, проходящая через датчики 23, соответственно уменьшится. Система определяет изменение силы, по меньшей мере, на одном датчике 23, и движение каретки может быть остановлено. Положение каретки 15 записывается и может соответствовать точке, в которой острие инструмента расположено на поверхности работы. Поскольку острие инструмента и рабочая поверхность могут быть жесткими, то определяемая передача веса происходит на очень малых расстояниях, и ошибка этого способа может соответствовать менее 0,0005 дюйма при использовании твердосплавного наконечника маршрутизатора размером 1/4 дюйма на поверхности многослойной березовой фанеры.
[00205] Система 1000 может неоднократно продвигать и втягивать острие инструмента 24 по направлению и в сторону, противоположную материалу 2 или поверхности (например, письменного стола, скамьи, пола или другой опорной структуры), поддерживающей материал 2. Система 1000 может неоднократно продвигать и втягивать острие инструмента 24, чтобы генерировать или создавать трехмерную карту материала 2.
[00206] В некоторых случаях, система 1000 может продвигать острие инструмента 24 рядом с краем материала 2. Система 1000 может продвигать острие инструмента 24 рядом с краем материала 2 до тех пор, пока острие инструмента 24 не войдет в контакт с поверхностью, поддерживающей материал 2. Система 1000 может устанавливать толщину материала, путем установления расстояния за пределами поверхности материала 2, на которое острие инструмента 24 продвигается, чтобы войти в контакт с поверхностью, поддерживающей материал 2. Система может устанавливать эти положения, используя датчики силы 23, чтобы определять, когда острие инструмента 24 входит в контакт с материалом 2 или поверхностью, поддерживающей материал. Например, система 1000 (или двигатель 19) может продвигать рабочий элемент 24 к поверхности, поддерживающей рабочую поверхность. Часть основания 18 инструмента может находиться в контакте с рабочей поверхностью 2, в то время как часть основания 18 инструмента может находиться вне материала 2. Или, в некоторых случаях, основание 18 может находиться в контакте с материалом 2, и материалу может быть придана форма или выполнена с возможностью, позволяющей острию инструмента 24 при продвижении контактировать с поверхностью, поддерживающей материал 2, с противоположной стороны поверхности; или острие инструмента 24 может продвигаться через отверстие в материале 2 для вхождения в контакт с поверхностью, поддерживающей материал 2. Система 1000 (например, посредством датчика 23) может определять рабочий элемент 24, контактирующий с поверхностью, поддерживающей рабочую поверхность. Например, система 1000 может определять третье значение параметра (например, силы) и устанавливать толщину рабочей поверхности 2, реагируя на вторую разницу между первым значением и третьим значением, которая больше порогового значения (например, разница может быть больше 1%, 2%, 5%, 10%, одного из первого значения или третьего значения; или разница может быть больше значения силы, например, 1 ньютон, 0,5 ньютона, 0,01 ньютона, 2 ньютона, 5 ньютонов или 10 ньютонов).
[00207] Система 1000 может устанавливать несколько точек местоположения на основании рабочего элемента 24 инструмента, контактирующего с рабочей поверхностью. Например, система 1000 может неоднократно продвигать и втягивать рабочий элемент 24 для того, чтобы он входил в контакт с материалом 2, и перемещать рабочий элемент 24 в сторону, противоположную поверхности. Система 1000 может записывать информацию каждый раз, когда острие инструмента 24 входит в контакт с материалом 2 (или не входит в контакт с материалом 2). Например, система 1000 может записывать или идентифицировать точки местоположения. Каждая точка местоположения может иметь координаты оси x, координаты оси у и координаты оси z. Координаты x-y можно установить, используя маркеры на поверхности материала, и они могут находиться относительно поверхности материала или положения на поверхности материала. Координаты x-y можно установить, используя фидуциальные маркеры на поверхности материала, методы формирования изображения или методы визуализации. Например, второй датчик инструмента (например, визуальный датчик или камера) может устанавливать координату оси x и координату оси у каждой из точек местоположения, используя фидуциальный маркер, помещенный на рабочей поверхности. Система может устанавливать координату z (или глубину), путем продвижения острия инструмента 24 до тех пор, пока острие 24 не войдет в контакт с поверхностью, и путем измерения глубины относительно откалиброванного нулевого положения. Откалиброванное нулевое положение может представлять собой положение на поверхности материала. Система 1000 может генерировать трехмерную карту рабочей поверхности 2, используя точки местоположения.
[00208] Система 1000 может измерять геометрические параметры рабочей поверхности 2, сопоставляя положение острия инструмента 24 с положением устройства (например, инструмента 1000) на плоскости рабочей поверхности 2. Для реализации этого, острие инструмента 24 (например, цилиндрический инструмент с коническим или сферическим острием) может сначала относиться к системе координат инструмента 1000, посредством определения положения острия инструмента 24. После того, как положение острия инструмента 24 относительно системы координат инструмента станет известно, инструмент может быть расположен сбоку над интересующей поверхностью (например, над рабочей поверхностью 2) для установления вертикального положения рабочей поверхности. Вертикальное положение рабочей поверхности может относиться к поверхности материала рабочей поверхности. В некоторых случаях, вертикальное положение может указывать на углубление, полость, выемку или вогнутый участок в куске древесины, глубина которого представляет интерес. В некоторых случаях, вертикальное положение может указывать на приподнятый участок, неровность, выступ или выпуклый участок в куске дерева, глубина которого представляет интерес. Затем острие инструмента может быть вставлено, продвинуто, опущено, погружено, иным образом перемещено до тех пор, пока острие инструмента не войдет в контакт с поверхностью участка материала (например, с углублением или выступом). Дополнительное смещение острия инструмента за пределы верхнего участка поверхности, где острие инструмента впервые вошло в контакт с рабочей поверхностью, может указывать на глубину углубления. Аналогичным образом, уменьшение смещения острия инструмента над участком поверхности, где острие инструмента впервые вошло в контакт с рабочей поверхностью, может указывать на глубину выступа. Если бы интересовал профиль поверхности углубления, то инструмент можно было бы перемещать по углублению по множеству точек. Инструмент может определять глубину в каждом из множества точек. Инструмент может записывать как глубину, так и боковое положение инструмента (например, координаты x, y и z, где координаты x и у могут относиться к боковому положению, а координата z может относиться к глубине). Боковое перемещение может быть выполнено автоматически с использованием встроенной позиционирующей платформы, или выполнено вручную пользователем, или в комбинации и того, и другого.
[00209] Система 1000 может идентифицировать или устанавливать центральное положение отверстия на рабочей поверхности 2. Например, инструмент 1 с коническим острием 24 может быть встроен в систему. Затем инструмент 1 можно расположить приблизительно (например, в пределах 5%, 10%, 15%, 20%, 25%, 30%, 50%, 75% или 90% диаметра отверстия) над центром отверстия, и погружать до тех пор, пока острие инструмента 24 не войдет в контакт с окружностью отверстия. Поскольку острие инструмента 24 может быть коническим, то острие инструмента 24 может способствовать к тому, что инструмент будет расположен над центром отверстия. Затем инструмент может устанавливать боковое положение (например, координаты x и y), используя, например, видеосистему с камерой 10 для определения положения отверстия.
[00210] Система 1000 может включать или сообщаться с вычислительным устройством, процессором или микропроцессором (например, процессором системы 680). Вычислительное устройство может включать, по меньшей мере, один способ системы 680. Система 1000 может использовать вычислительное устройство для управления перемещением позиционирующего двигателя, а также для измерения силы, проходящей, по меньшей мере, через один датчик силы 23. Датчики 23 могут включать, например, резисторы, чувствительные к силе, пьезоэлектрические датчики, тензодатчики, нагрузочные штифты, изгибы балок, высоконапряженные соединения, магнитный датчик измерения уровня, датчик крутящего момента, датчики нагрузки, гидравлические датчики нагрузки, пневматические датчики нагрузки, упругие устройства, магнитноупругие устройства, пластическую деформацию, фольговые тензодатчики и так далее.
[00211] В некоторых вариантах осуществления настоящего изобретения, инструмент может определять наклон, используя камеру, визуальную информацию или ИИБ. Инструмент может включать камеру 10 (это также продемонстрировано на Фигуре 8А) или другой датчик. Камера 10 может включать, по меньшей мере, один компонент или функциональность камеры 682. Камера 10 может устанавливать сдвиг в захваченном изображении, соответствующий наклону, возникающему в результате подъема основания. Камера 10 может сделать первый снимок или изображение до того, как инструмент приведет острие инструмента 24 в контакт с рабочей поверхностью 2, а затем сделать второе изображение, когда острие инструмента войдет в контакт с рабочей поверхностью. Камера 10 может неоднократно делать изображения на основании временного интервала (например, каждую 1 секунду, 2 секунды, 3 секунды, 0,5 секунд, или 5 секунд) и сравнивать первое изображение с последующим изображением для идентификации наклона. Камера 10 может делать серию изображений и затем сравнивать изображения друг с другом, чтобы определить, когда острие инструмента вошло в контакт с поверхностью для того, чтобы вызвать наклон. В некоторых случаях, каждое изображение в серии изображений может быть связано с временной меткой. Каждое из изображений может быть дополнительно связано, обозначено, или оно может иным образом соответствовать положению острия инструмента. Система может установить, какое изображение из серии изображений в первую очередь указывает на наклон (например, объект на изображении, сделанном камерой 10, может казаться ближе, когда инструмент 1000 наклоняется к задней части инструмента, когда острие инструмента входит в контакт с материалом 2). В некоторых случаях, система 1000 может устанавливать разницу или несовпадение в пикселях между первым изображением и последующим изображением. Реагируя на определение несовпадения в пикселях, система 1000 может установить, что острие инструмента входило в контакт с материалом 2 во временной отметке, соответствующей последующему или второму изображению, имеющему несовпадающие пиксели относительно первого изображения или предыдущего изображения. Камера может сравнивать первое изображение со вторым изображением, чтобы определять угол наклона или различие между двумя изображениями.
[00212] В некоторых вариантах осуществления настоящего изобретения, система 1000 может устанавливать, когда рабочий элемент 24 входит в контакт с известной поверхностью (например, с верхней поверхностью основания 18). Когда рабочий элемент 24 находится на расстоянии от известной поверхности, система 1000 может заставить рабочий элемент 24 сначала войти в контакт с рабочей поверхностью 2, продвигая рабочий элемент 24 вниз на известное смещение, равное высоте между известной поверхностью и рабочей поверхностью 2. Этот способ установления контакта между рабочим элементом и рабочей поверхностью может использоваться, если рабочий элемент может проникать в рабочую поверхность и, следовательно, затруднять определение контакта между рабочим элементом и рабочей поверхностью.
[00213] В некоторых вариантах осуществления настоящего изобретения, контакт между рабочим элементом и рабочей поверхностью может быть установлен путем определения мощности, потребляемой актуатором, совершающим перемещение вдоль оси (например, двигателя, совершающего перемещение оси z). После того, как рабочий элемент войдет в контакт с рабочей поверхностью, мощность, потребляемая актуатором, увеличивается из-за увеличения нагрузки на ось, когда рабочий элемент давит на рабочую поверхность. В некоторых вариантах осуществления настоящего изобретения, мощность, потребляемая актуатором оси, может быть измерена с использованием встроенного токоизмерительного датчика в источнике подачи напряжения для актуатора. В некоторых вариантах осуществления настоящего изобретения, контакт между рабочим элементом и рабочей поверхностью может быть установлен путем измерения отклонения между положением шага актуатора и показаниями кодировщика оси актуатора - отклонение увеличивается, когда рабочий элемент входит в контакт с рабочей поверхностью.
[00214] В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в инструменте (например, система 1000) может наблюдать за сигналами, исходящими, по меньшей мере, от одного из следующих: датчика силы, камеры, токоизмерительного датчика, подающего питание на аткуатор, кодировщика, наблюдающего перемещение вдоль оси, или ИИБ одновременно для определения контакта рабочего элемента (например, острия инструмента) с поверхностью (например, с рабочей поверхностью, поверхностью на инструменте). В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один наблюдаемый сигнал может быть проанализирован, по меньшей мере, одним процессором для установления контакта рабочего элемента с поверхностью. В некоторых вариантах осуществления настоящего изобретения, контакт рабочего элемента с поверхностью может быть установлен на основании сигнала, который предоставляет наилучшее отношение сигнал/шум. В некоторых вариантах осуществления настоящего изобретения, контакт рабочего элемента с поверхностью может быть установлен на основании, по меньшей мере, двух сигналов, подтверждающих, что рабочий элемент входил в контакт с поверхностью.
[00215] Датчик 10 может включать датчик изображения или камеру. Параметр может включать пиксель. Пиксель может иметь местоположение на изображении. Система 1000 может захватить (например, посредством датчика изображения) первое изображение, содержащее пиксель с первым значением (например, двоичным значением, 256-битным значением, красным, сине-зеленым значением, значением с оттенками серого, значением яркости или числовым значением). Система 1000 может захватить второе изображение, содержащее второе значение пикселя. Второе значение может быть для того же пикселя, что и первое значение. Пиксель может представлять собой местоположение на изображении. Система 1000 может сравнивать первое изображение, содержащее первое значение, со вторым изображением, содержащим второе значение, чтобы идентифицировать разницу между первым значением и вторым значением. Система может сравнить, по меньшей мере, один пиксель на первом изображении с, по меньшей мере, одним пикселем на втором изображении, чтобы определить разницу. Система может сравнить два захваченных изображения, чтобы определить тот факт, что они не совпадают. Изображения могут быть несовпадающими из-за того, что основание наклонено под углом, что может привести к тому, что камера захватит второе изображение под другим углом или с другого ракурса, по сравнению с первым изображением. Таким образом, система может связывать факт несовпадения с острием инструмента 24, контактирующим с поверхностью рабочего материала, с наклоном основания.
[00216] Инструмент может устанавливать близость острия инструмента 24 к рабочей поверхности 2, используя емкостный датчик 50 или электромагнитный датчик 60. Например, электромагнитный датчик 60 может измерить или определить изменение индуктивности чувствительной катушки, находящейся вблизи острия инструмента 24 или рабочего элемента 24, включающей металл, путем измерения вихревых токов, индуцированных в металле.
[00217] В некоторых случаях, инструмент 1000 может включать ИИБ. Например, датчик 23 или датчик 10 может включать ИИБ, например, 3-осевой акселерометр и гироскоп. ИИБ может указывать на наклон, реагируя на перемещение или внезапное перемещение, вызванное подъемом основания. Например, ИИБ может установить первое значение, указывающее на ускорение основания инструмента, когда острие инструмента не соприкасается с поверхностью. Первое значение может быть нулевым, например, потому что основание может опираться на рабочую поверхность. ИИБ может установить второе значение, когда острие инструмента касается или входит в контакт с поверхностью. Второе значение или второе значение ускорения может указывать на ускорение основания, на воздействие, перемещение, силу или другое смещение основания, вызванное контактом острия инструмента с рабочей поверхностью и перемещением основания, которое механически соединено с острием инструмента. Вычислительное устройство может сравнивать первое значение со вторым значением, чтобы идентифицировать ускорение основания инструмента на основании рабочего элемента, контактирующего с рабочей поверхностью. В некоторых случаях, вычислительное устройство может установить, что первое значение и второе значение не равны или, по существу, не равны (например, в пределах 1%, 2% или 5%) и установить, что острие инструмента входило в контакт с рабочей поверхностью на основании разницы в ускорении.
[00218] Инструмент может устанавливать или определять дополнительную информацию об инструменте, включающем острие, или о положении рабочего элемента, о диаметре или геометрических параметрах инструмента. Установление геометрических параметров инструмента может включать или относиться к установлению диаметра режущего инструмента. Информация о геометрических параметрах инструмента может быть использована для автоматического установления длины стружечной канавки рабочего элемента и угла резака (например, V-образный наконечник или угол спирали). Например, инструмент может включать камеры 10 или датчик обнаружения по прерыванию луча 10 (например, лазерный датчик обнаружения по прерыванию луча, инфракрасный датчик обнаружения по прерыванию луча, фотоэлектрический датчик или оптический датчик) вблизи острия инструмента 24. Рабочий элемент 24 может быть опущен на линию действия датчиков 10, и инструмент может определить положение рабочего элемента 24, когда рабочий элемент 24 прерывает луч, сформированный датчиками 10. В некоторых случаях, ось луча может быть предварительно откалибрована относительно системы координат инструмента.
[00219] В некоторых случаях, система может включать, по меньшей мере, одну видеокамеру 10, нацеленную на острие инструмента 24 или элемент инструмента 1, чтобы установить положение рабочего элемента 1 или острия инструмента 24. Видеокамера 10 может быть предварительно откалибрована относительно системы координат инструмента для того, чтобы определить острие инструмента 24. В некоторых случаях, видеокамера может включать датчик линейного прибора с зарядовой связью (ПЗС) или другой датчик изображения. Для определения острия инструмента, датчик линейного ПЗС может использовать обработку в меньшем объеме, чем видеокамера.
[00220] Система 1000 можно измерить диаметр рабочего элемента 1 или острия инструмента 24. Инструмент может циклически сдвигать острие инструмента 24 во время измерения или установления положения острия инструмента. Сдвигая острие инструмента, инструмент может использовать единственный датчик обнаружения по прерыванию луча 10 для определения диаметра инструмента, пропуская инструмент слева направо через датчик 10. Боковое перемещение инструмента может привести к первому прерыванию, а затем к освобождению луча от препятствий для предоставления возможности измерения диаметра инструмента. Поскольку наконечники маршрутизатора могут иметь спиральные канавки, то инструмент может выполнять многочисленные измерения по длине инструмента для установления диаметра. Инструмент может устанавливать диаметр, используя вихревые токи или емкостное измерение, полученное одномерным датчиком, для того, чтобы собрать многомерную информацию о геометрических параметрах инструмента, сопоставляя данные датчика с положением инструмента. Инструмент может установить дополнительную информацию об острие инструмента 24, например, угол наклона в случае V-образного режущего наконечника. Кроме того, инструмент может включать видеокамеру 10 для определения геометрических свойств инструмента.
[00221] Система 1000 может включать или быть выполнена с системой гибридного позиционирования для позиционирования рабочего элемента инструмента. Например, система может включать платформу. Система может включать скользящую подкладку, расположенную близко к платформе, для облегчения перемещения платформы. Система может включать, по меньшей мере, один двигатель, адаптированный к перемещению платформы. Система может включать, по меньшей мере, один контроллер двигателя, который управляет, по меньшей мере, одним двигателем. Система может включать вычислительное устройство или процессор в сочетании, по меньшей мере, с одним программным приложением для обработки данных и предоставления информации, по меньшей мере, одному контроллеру двигателя. Система может включать первый датчик, выполненный с возможностью захвата первой информации о поверхности материала для построения карты поверхности. Первая информация может включать изображение поверхности. Система может включать второй датчик, соединенный с возможностью связи с процессором. Второй датчик может захватывать вторую информацию о поверхности, используемую для установления, по меньшей мере, одного из следующего: местоположения рабочего элемента и ориентации рабочего элемента относительно поверхности. Вычислительное устройство или процессор может построить карту поверхности, используя первую информацию, захваченную первым датчиком. Вычислительное устройство или процессор может принимать конструкцию, соответствующую карте поверхности, построенной с использованием первой информации. Процессор может отображать наложенную на карту конструкцию посредством экрана дисплея. Система может принимать, посредством второго датчика, вторую информацию о поверхности. Система может установить, на основании второй информации о поверхности и на основании карты, по меньшей мере, одно из следующего: местоположение рабочего элемента и ориентацию рабочего элемента относительно поверхности. Система может отображать местоположение рабочего элемента, в наложенном на карту виде посредством экрана дисплея. Система может установить, на основании конструкции, зарегистрированной на карте, и, по меньшей мере, одного из следующего: местоположения и ориентации, желаемое местоположение для рабочего элемента. Система может предоставлять информацию об управлении двигателем для управления, по меньшей мере, одним двигателем для перемещения платформы и рабочего элемента в желаемое местоположение, как только инструмент будет проведен по первому направлению, которое находится в пределах выбранного диапазона, по существу, рядом с контуром конструкции. Система может автоматически перераспределить инструмент к граничному краю конструкции во втором направлении, как только инструмент будет проведен в первом направлении.
[00222] Например, система 1000 может использовать установленное положение оси z рабочего элемента для предоставления, на основании, по меньшей мере, частично, положения оси z рабочего элемента, информации об управлении двигателем для управления, по меньшей мере, одним двигателем для перемещения рабочего элемента из первого местоположения во второе местоположение. Информация об управлении двигателем может включать, по меньшей мере, одно из следующего: информацию по оси х, информацию по оси y или информацию по оси z. Инструмент может быть проведен в направлении, которое находится в пределах диапазона, находящегося радом с предварительно заданной траекторией для рабочего элемента инструмента.
[00223] В некоторых случаях, система 1000 может принимать первую информацию от первого датчика и устанавливать, на основании первой информации о поверхности материала, по меньшей мере, одно из следующего: первое местоположение (например, координаты x-y или координаты x-y-z) рабочего элемента инструмента и ориентацию рабочего элемента относительно поверхности, используя карту поверхности. Система может указывать, посредством экрана дисплея инструмента, первое местоположение рабочего элемента инструмента относительно карты поверхности. Система может выбрать конструкцию, соответствующую карте поверхности, чтобы идентифицировать траекторию для рабочего элемента инструмента. Система может сравнивать первое местоположение рабочего элемента инструмента с конструкцией для установления второго местоположения для рабочего элемента инструмента, соответствующего траектории для рабочего элемента инструмента. Система может предоставлять на основании, по меньшей мере, одного из следующего: второго местоположения и ориентации, информацию управления двигателем для управления, по меньшей мере, одним двигателем для перемещения платформы и рабочего элемента во второе местоположение. Инструмент может быть проведен в направлении, которое находится в пределах диапазона, находящегося радом с траекторией для рабочего элемента инструмента.
[00224] Система может выполнять метод с постоянной скоростью, чтобы предоставлять информацию об управлении двигателем для управления, по меньшей мере, одним двигателем для перемещения платформы и рабочего элемента во множество последующих местоположений, в то время как инструмент проводят в соответствующем множестве последующих направлений. Система может автоматически перераспределить инструмент к граничному краю конструкции в третьем направлении, как только инструмент будет проведен в четвертом направлении. Система может отображать окно целевого диапазона, предоставляя иллюстрацию ориентировочной точки инструмента, предполагаемую траекторию резания и желаемую траекторию перемещения инструмента. Предполагаемая траектория резания может указывать положение в системе координат x-y, а также глубину оси z.
[00225] Датчик может принимать или захватывать прямую трансляцию данных изображения. Система может принимать прямую трансляцию данных изображения, захваченных датчиком, и использовать прямую трансляцию данных изображения для сравнения предыдущего положения (например, координаты x-y или координаты x-y-z) в конструкции и предпочтительного следующего положения (например, координаты x-y или координаты x-y-z) в конструкции для автоматического перераспределения положения инструмента.
[00226] Хотя на Фигурах 10A-10В продемонстрировано установление положения вращающегося режущего инструмента 24 относительно рабочей поверхности 2, способ может быть применен к ручкам для черчения, ножам для резания винила, наконечникам для пипеток, вакуумным насадкам автоматов для транспортировки и установки деталей или к любой другой системе для установления нулевого положения рабочего элемента 24 относительно рабочего материала 2.
[00227] На Фигуре 10С продемонстрировал датчик силы 23, находящийся рядом с подкладкой, в соответствии с вариантом осуществления настоящего изобретения. Датчик силы 23 может быть временно помещен там для выполнения процедуры калибровки для установления нулевого положения. Датчик силы 23 может быть удален после завершения процедуры калибровки.
[00228] На Фигуре 10D продемонстрирован датчик силы 23, расположенный или помещенный на верхней части пластины основания 920. По меньшей мере, один датчик силы 23 может быть расположены в любом месте на инструменте 1000, в результате чего датчик силы 23 может определять изменение силы, соответствующее острию инструмента 24, касающемуся поверхности материала 2. Изменение силы может представлять собой уменьшение определенной силы, потому что некоторая часть силы передается посредством острия инструмента 24 на материал, а не через датчик силы 23 на материал.
[00229] На Фигурах 11А и 11В продемонстрирован инструмент 1100 с пластиной основания 1105. Инструмент 1100 может включать, по меньшей мере, один компонент инструмента 1000, и пластина основания 1105 может соответствовать пластине основания 910. На Фигуре 11A продемонстрирована пыль или частицы, которые остаются на материале, когда методы извлечения и направления пыли не используются, в то время как Фигуре 11В продемонстрировано, как методы направления и извлечения пыли, описанные в настоящем документе, могут удалять пыль из материала (например, посредством воздушного потока, сгенерированного вентилятором и/или вакуумной установкой, проходящим через канал в сторону, противоположную задней части инструмента, или путем извлечения через вакуумный порт). Инструмент 1100 может перемещать через полость или канал пластины основания инструмента частицы материала, удаленные с рабочей поверхности рабочим элементом. Инструмент 1100 может удалять частицы с помощью вакуума через полость в сторону, противоположную рабочему элементу.
[00230] На Фигуре 12 продемонстрирована блок-диаграмма способа калибровки определения местоположения инструмента, в соответствии с вариантом осуществления настоящего изобретения. В кратком обзоре, способ 1200 включает инструмент, определяющий первое значение параметра на этапе 1205. На этапе 1210 инструмент продвигает рабочий элемент к рабочей поверхности. На этапе 1210 инструмент определяет второе значение параметра. На этапе 1220 инструмент определяет положение рабочего элемента относительно рабочей поверхности. Способ на этапе 1200 может быть выполнен с помощью, по меньшей мере, одного компонента или модуля, по меньшей мере, одной системы, изображенной на Фигурах 1-11В.
[00231] Как показано на Фигуре 12, и с учетом подробностей, инструмент определяет первое значение параметра на этапе 1205. Инструмент (например, через датчик) может определить первое значение параметра. Датчик может быть соединен с возможностью связи с вычислительным устройством, содержащим, по меньшей мере, один процессор. Параметр или его первое значение может указывать на величину силы, с которой участок основания инструмента воздействует на рабочую поверхность или в направлении рабочей поверхности. Инструмент может определить первое значение параметра, когда участок основания инструмента входит в контакт с рабочей поверхностью. Например, участок основания может опираться или быть помещен на рабочую поверхность или материал. В некоторых случаях, основание может включать подкладку, которая находится в контакте с рабочей поверхностью.
[00232] На этапе 1210 инструмент продвигает рабочий элемент к рабочей поверхности. Инструмент (например, посредством двигателя, управляемого вычислительным устройством) может продвигать рабочий элемент к рабочей поверхности. Когда рабочий элемент входит в контакт с рабочей поверхностью, основание может, по меньшей мере, частично, находиться в контакте с рабочей поверхностью. Например, рабочий элемент может входить в контакт с рабочей поверхностью и, по меньшей мере, частично, поднимать или наклонять участок основания. Участок основания может или не может находиться в контакте с поверхностью, в зависимости от того, насколько острие инструмента, находящееся в контакте с поверхностью материала, поднимает или наклоняет основание. В некоторых случаях, основание все же может находиться в контакте с поверхностью, но величина силы, с которой основание воздействует на рабочую поверхность, может быть меньше. Это меньшая величина силы может соответствовать второму значению параметра.
[00233] На этапе 1210 инструмент определяет второе значение параметра. Инструмент (например, посредством датчика) может определить, когда рабочий элемент находится в контакте с рабочей поверхностью путем идентификации второго значения параметра, которое меньше, чем первое значение параметра. Второе значение может быть меньше первого значения, потому что сила, с которой воздействует участок основания, может быть меньше из-за того, что острие инструмента распределяет силу, с которой воздействует основание. Сила может быть распределена таким образом, чтобы острие инструмента воздействовало с некоторой силой на материал, или таким образом, чтобы другой участок основания воздействовал с большей силой, чем первый участок основания. Например, острие инструмента может наклонять основание таким образом, чтобы первый участок основания воздействовал с меньшей силой, чем второй участок основания. Например, инструмент может определять второе значение параметра, когда участок основания инструмента не находится в контакте с рабочей поверхностью, реагируя на двигатель, который заставляет рабочий элемент входить в контакт с рабочей поверхностью. Инструмент может устанавливать положение оси z рабочего элемента относительно рабочей поверхности, реагируя на то, что рабочий элемент наклоняет основание, реагируя на то, что рабочий элемент контактирует с рабочей поверхностью 2.
[00234] На этапе 1220 инструмент определяет положение рабочего элемента относительно рабочей поверхности. Инструмент (например, посредством вычислительного устройства) может устанавливать положение оси z или глубину рабочего элемента относительно рабочей поверхности, реагируя на разницу между первым значением и вторым значением, превышающую пороговое значение. Инструмент может откалибровать систему определения положения инструмента на основании положения этого определенного положения оси z. Например, инструмент может установить это положение как нулевое, первоначальное или стандартное положение. Затем система может определить координату оси z или положение острия инструмента относительно откалиброванного нулевого положения. В некоторых случаях, инструмент может не калибровать определенную поверхность как нулевое положение, но он может записать абсолютное расстояние шпинделя. Поскольку длина острия инструмента может варьироваться в зависимости от типа рабочего элемента или инструмента, то положение острия шпинделя может быть предварительно задано инструментом, поскольку оно может не быть взаимозаменяемым.
[00235] Форма и структура вариантов осуществления настоящего изобретения для использования режущим инструментом предоставлены и изображены на Фигурах 13-21. Варианты осуществления настоящего изобретения, изображенные на Фигурах 13-21, предоставляют систему или установку 100, которая выполнена с возможностью использования с маршрутизатором 500. Система 100 включает две опорные стойки 104, которые прикреплены к корпусу основания 130 на нижнем конце и оканчиваются на держателе устройства 122 на верхнем конце. Держатель устройства 122 включает левый и правый зажимы дисплея 124 для зажима или фиксации монитора или интеллектуального устройства 570 в держателе устройства 122. Устройство 570 включает экран дисплея 572, чтобы пользователь мог просматривать траекторию резания при этом конкретном использовании. Основание 130 также имеет левую и правую ручки-держатели или захваты 106, прикрепленные посредством опорных рычагов ручек-держателей 108.
[00236] Нижний конец основания 130 имеет нижнюю пластину 139, которая окаймляет платформу 150 и скользящую подкладку нижней платформы 151. Основание 130 и нижняя пластина 139 скреплены друг с другом, например, с помощью крепежных винтов. Как видно на Фигуре 20, нижняя пластина 139 имеет нижнюю скользящую подкладку 141, прикрепленную к нижней части. Нижняя скользящая подкладка 141 используется для содействия перемещению установки 100 вдоль поверхности обрабатываемого материала. Нижняя скользящая подкладка 141 может быть изготовлена из полиэтилена высокой плотности, тефлона или другого подходящего материала, который является одновременно износостойким и пригодным для скольжения по материалу.
[00237] Маршрутизатор 500 добавляется к установке 100 путем прикрепления пластины основания маршрутизатора 510 к платформе 150. Как видно на Фигуре 21, платформа 150 имеет несколько точек крепления инструмента 164 для прикрепления основания маршрутизатора 510 к платформе 150. Основание маршрутизатора 510 имеет несколько опорных стоек основания маршрутизатора 508, которые формируют ограждение вокруг наконечника маршрутизатора 512. Маршрутизатор 500 также имеет шнур питания 506 и кнопку включения-выключения 504. Установка 100 может быть реализована как автономный портативный блок, включающий встроенный источник питания, например, батарейный источник питания.
[00238] Интеллектуальный блок или монитор 570 может иметь входной кабель 574 с кабельным выводом или розеткой 576. Если устройство представляет собой интеллектуальный блок ЦПУ, то программное обеспечение и блок памяти будут присутствовать на самом устройстве. Если устройство 570 представляет собой просто монитор, то кабель 574 и розетка 576 будут подключены к блоку ЦПУ.
[00239] Как показано на Фигурах 14-19, система 100 может содержать двигатель платформы 210 и двигатель шарнира 220. Двигатель платформы 210 используется для управления перемещением платформы 150. Двигатель шарнира 220 используется для управления перемещением рычага шарнира 156, который тянет или толкает платформу 150 для преобразования вращательного перемещения двигателей 210, 220 в относительно линейное перемещение. И двигатель платформы 210, и двигатель шарнира 220, каждый имеет свою собственную крышку двигателя - 212, 222 соответственно.
[00240] Двигатели 210, 220 могут управляться приводом двигателя платформы 253 и приводом двигателя шарнира 254, которые соединены с платой с печатной схемой 250 и с микроконтроллерной платой 252. Микроконтроллер 252 обрабатывает команды низкого уровня, поступающие от интеллектуального устройства или блока ЦПУ (то есть ноутбука). Команды должны быть командами для перемещений двигателей 210, 220, для установления положений (то есть, положений 150, 125) в соответствии с командами корректного этапа для того, чтобы привести двигатели в эти положения. Ориентация двигателей отслеживается путем возвращения их в нулевое положение один раз, а затем путем отслеживания прохождения всех последующих этапов. В качестве альтернативного варианта осуществления настоящего изобретения, система может использовать вращающиеся кодировщики для отслеживания состояния ориентации валов двигателя. Двигатели 210, 220 и приводы двигателей 253, 254 получают питание, благодаря соединению розетки штепселя питания 255 с источником питания.
[00241] Как показано на Фигурах 15-16, задняя часть установки 100 включает опору камеры 190. Опора камеры 190 может представлять собой, по меньшей мере, один опорный элемент, который соединен с корпусом верхней платформы 130 и оканчивается в верхней части установки 100, где установлена камера 300. Камера 300 и объектив 304 помещены в относительно нижнем положении для захвата изображений обрабатываемого материала и окружающих его областей.
[00242] Эксцентрики могут быть использованы для преобразования вращательного перемещения двигателей в линейное перемещение. Эксцентрики представляют собой круглые диски, вращающиеся вокруг смещенного от центра вала. Поскольку валы вращаются, они производят линейное перемещение в воротниках, обернутых вокруг эксцентриковых дисков. Эксцентрики способны поддерживать такую же точность низкого люфта прецизионной линейной платформы, и при этом они менее дорогие. Диапазон линейного смещения на 1/2 дюйма вполне соответствует возможностям эксцентрика. Инструмент может включать два эксцентрика, вмонтированных в корпус и соединенных с платформой, которые могут скользить по ее основанию. Эксцентрики могут вращаться шаговыми двигателями, и вращая их, платформа может перемещаться внутри корпуса. Размер и форма различных эксцентриков могут варьироваться, чтобы обеспечить большее или меньшее относительное перемещение инструмента 699 относительно рабочего пространства.
[00243] Чтобы ограничить платформу, один эксцентрик может быть соединен непосредственно с платформой с помощью шарикоподшипниковой муфты, а другой - соединен посредством муфты и петли. Такая конструкция связи приводит к нелинейной взаимосвязи между эксцентричной ориентацией и положением платформы. Вблизи центра диапазона умеренное вращение эксцентрика производит умеренное движение платформы. В противоположность этому, вблизи края диапазона требуется гораздо больше вращения для перемещения платформы на фиксированную величину. В некоторых примерах, смещение платформы ограничено, примерно, 95% максимального диапазона с тем, чтобы избежать положений с крайней нелинейностью. Такая конструкция связи также допускает обратный ход привода, поскольку силы, действующие на инструмент, могут заставить кулачковые упоры вращаться в сторону, противоположную их целевым положениям. Однако настоящее изобретение использует двигатели с адекватным питанием, которые имеют достаточную мощность для предотвращения обратного хода привода даже при наличии значительных сил.
[00244] Как показано на Фигуре 21, корпус верхней платформы 130 может представлять собой цельный блок с дистанционными прокладками 131, 133, 135, изготовленными на станке или сформированными в корпусе верхней платформы 130. Дистанционные прокладки 131, 133, 135 предоставляют необходимое пространство для перемещения платформы 150 и рычага шарнира 156. Передние дистанционные прокладки 131, боковые дистанционные прокладки 133 и задние дистанционные прокладки 135 не обязательно должны быть сформированы как одно целое. Вместо этого, передние дистанционные прокладки 131, боковые дистанционные прокладки 133 и задние дистанционные прокладки 135 могут быть отдельными деталями, прикрепленными к корпусу верхней платформы 130. Корпус верхней платформы 130 также вмещает несколько скользящих подкладок верхней платформы 137. Скользящие подкладки верхней платформы 137 позволяют стабилизирующим рычагам платформы 152 перемещаться вдоль подкладок 137 с минимальным трением.
[00245] Платформа 150 идеально изготовлена из легкого, но износостойкого и прочного материала, такого как алюминий или какой-либо другой сплав. Предполагается, что платформа 150 изготовлена на станке и включает, по меньшей мере, один стабилизирующий рычаг 152, элемент эксцентрикового рычага платформы 154, точку крепления инструмента 168 и отверстие 160, где инструмент продвигается через платформу 150. Кроме того, предполагается, что рычаг шарнира 156 изготовлен на станке из того же сплава или материала, что и платформа 150.
[00246] Во время работы, двигатель платформы 210 перемещается, реагируя на вращение вала двигателя платформы 184. К валу двигателя платформы 184 прикреплен элемент эксцентрикового кулачка платформы 174. Когда вал двигателя платформы 184 вращается, эксцентриковый кулачок платформы 174 вращается, и кулачковая конструкция заставляет элемент рычага платформы 154, соединенный с кулачком 174 и окружающий его, перемещать платформу 150. Кольцо подшипника может использоваться между кулачком 174 и элементом рычага платформы 154.
[00247] Кроме того, когда двигатель шарнира 220 перемещается, вал двигателя шарнира 186 вращается. К валу двигателя шарнира 186 прикреплен элемент эксцентрикового кулачка шарнира 176. Когда вал двигателя шарнира 186 вращается, эксцентриковый кулачок шарнира 176 вращается, и кулачковая конструкция заставляет элемент рычага шарнира 154, соединенный с кулачком 176 и окружающий его, перемещать рычаг шарнира 156 назад и вперед, что заставляет платформу 150 перемещаться относительно рычага шарнира 156. Кольцо подшипника может быть использовано между кулачком 176 и рычагом шарнира 156.
[00248] Когда платформа 150 и рычаг шарнира 154 перемещаются, стабилизирующие рычаги платформы 152 перемещаются вдоль скользящих подкладок верхней платформы и скользящей подкладки нижней платформы 151 (например, как на Фигуре 13), чтобы стабилизировать платформу 150 во время перемещения. Кроме того, эксцентрик платформы 174 и эксцентрик шарнира 176 могут включать выступ. Выступ дает эксцентрику 174, 176 дополнительный материал для размещения установочного винта, который осуществляет зажим на валу двигателя платформы 184 или на валу двигателя шарнира 186, тем самым надежно прикрепляя его к соответствующему эксцентрику 174, 176. Эксцентриковый выступ шарнира 187 показан на Фигуре 21. Эксцентриковый выступ платформы на фигурах не показан, поскольку он перевернут относительно выступа шарнира 187, потому что платформа 150 и рычаг шарнира 156 работают в разных плоскостях.
[00249] На Фигуре 22 изображена система для направления инструмента. Производственные операции или операции обработки могут включать обработку или использование куска материала, имеющего, по меньшей мере, одну плоскую грань, например, вырезание формы из куска многослойной фанеры. Однако инструменту может быть затруднительно устанавливать местоположение края плоской грани, который может быть прямоугольным, как в листе многослойной фанеры, или гладким контуром, например, краем двухмерного шаблона. Системы, способы и устройство по настоящему решению относятся к системе, предназначенной для определения формы и/или положения края.
[00250] Система 2200 может быть выполнена с использованием, по меньшей мере, одного метода для облегчения направления рабочего элемента или наконечника инструмента. Например, инструмент может включать зонд, и он может быть выполнен посредством метода бокового зондирования, который измеряет поверхность материала или заготовки, или устанавливает ориентировочную точку на заготовке или относительно нее. Инструмент может проводить зондирование, по меньшей мере, одной точки контура заготовки для оцифровки шаблона. Инструмент может проводить зондирование, по меньшей мере, одной точки контура для сканирования края рабочего материала до и после переворачивания для того, чтобы выровнять чертежи для двусторонней обработки. Инструмент может проводить зондирование, по меньшей мере, одной точки контура для генерации наложения сетки.
[00251] В некоторых вариантах осуществления настоящего изобретения, система может включать ручной инструмент, соединенный с цифровым процессором. Ручной инструмент может включать физический элемент, например, зонд, обладающий известными или практически известными геометрическими параметрами. Зонд может представлять собой часть инструмента, используемого в ином качестве, помимо проведения зондирования, дополнительно к функции зонда, например, буровой наконечник. Используя, по меньшей мере, один датчик, система может устанавливать трехмерное положение или местоположение зонда в корпусе с произвольной системой координат и сохранять положение. Система может устанавливать положение, определив положение корпуса инструмента и используя смещение от корпуса инструмента к зонду, или система может непосредственно определять положение.
[00252] Система 2200 может включать, по меньшей мере, один компонент или функциональность системы, или инструмента 100, 680, 600, 800, 801, 1000 или 2800. Система 2200 может быть интегрирована или включена, по меньшей мере, в один компонент или элемент системы или инструмента 100, 680, 600, 800, 801, 1000 или 2800. Система 2200 может включать, по меньшей мере, одну функцию или компонент системы, или устройства Фигур 1-9 и 11А-11В. Например, система может включать инструмент 1000 и основание 18, или подкладку 22, соединенную с инструментом 1000. Система 2200 может включать, по меньшей мере, один процессор (например, ЦПУ 683), вычислительное устройство (например, 600) или блок памяти (например, блок памяти 687), спроектированные и сконструированные для облегчения направления инструмента. Система 2200 может включать интерфейс 2205. Интерфейс 2205 может включать сенсорный интерфейс, кнопки, переключатели запуска, интерфейс движения или графический пользовательский интерфейс. Интерфейс 2205 может включать динамический интерфейс 2205, который управляется, по меньшей мере, одним процессором системы 2200. Интерфейс 2205 может включать интерфейс ввода/вывода данных, например, сенсорный экран, клавиатуру, мышь или кнопки.
[00253] Система 2200 может принимать, посредством интерфейса 2205, команду или индикацию. Команда может включать команду инициировать или продолжить работу зонда или создания карты. Например, может поступить команда составить карту материала или заготовки. Пользователь может ввести команду посредством интерфейса 2205. Интерфейс 2205 может принимать различные команды или индикации. Например, интерфейс может принять индикацию о том, что зонд находится в контакте с краем материала. Интерфейс 2205 может принять индикацию или команду о том, чтобы опустить или поднять зонд. Интерфейс 2205 может принять индикацию инициировать, продолжить или прекратить составление карты материала. Интерфейс 2205 может, реагируя на прием команды, предоставить или передать команду двигателю 19 (например, посредством, по меньшей мере, одного процессора или вычислительного устройства). Например, вычислительное устройство может принять индикацию посредством интерфейса 2205 и, реагируя на индикацию, отдать команду двигателю 19 поднять или опустить зонд (например, острие инструмента 24).
[00254] В некоторых случаях, интерфейс 2205 может принять команду или индикацию об установках по умолчанию или о начальной глубине, или длине зонда. Например, пользователь может ввести данные о том, что зонд имеет длину 0,25 дюйма, 0,5 дюйма, 0,75 дюйма, 1 дюйм или другую длину в другом блоке. Пользователь может ввести величину, на которую зонд 2215 продвигается за пределы основания или за пределы поверхности материала после того, как зонд 2215 опустится.
[00255] Система 2200 может включать двигатель 19. Двигатель 19 может включать, по меньшей мере, один компонент или функциональность двигателя 19, изображенного в системе 1000. Двигатель 19 может управлять перемещением зонда 2215 для поднятия или опускания зонда 2215 (например, рабочего элемента, бурового наконечника или иного выступа) вдоль оси. Двигатель 19 может включать, по меньшей мере, один механический элемент (например, шестерню, пружину, катушку, магнитный компонент, цепь, шкив или рычаг) для поднятия и опускания зонда 2215. Двигатель 19 может перемещать зонд по оси z, которая ортогональна или перпендикулярна плоскости основания инструмента, например, пластине основания 7 или платформе 690.
[00256] Система 2200 может включать, по меньшей мере, один зонд 2215. Зонд 2215 может включать выступ, рабочий элемент или острие инструмента, например, острие инструмента 24. Зонд 2215 может быть сформирован из любого материала, например, из металла, алюминия, сплава, стали, железа, пластика, ткани или бумаги. В некоторых вариантах осуществления настоящего изобретения, зонд 2215 может включать лазер или луч света. Зонд 2215 может иметь любую форму, геометрические параметры или размеры, которые облегчают зондирование материала для генерации контура, карты или определения положения. Например, зонд 2215 может быть цилиндрическим, прямоугольным, плоским, узким или широким. Зонд 2215 может иметь радиус или длину, например, радиус 1/8, 1/4 дюйма или 1/2 дюйма. Информация о зонде, включая форму, радиус, длину, может быть сохранена в запоминающем устройстве 2235.
[00257] Система 2200 может включать, по меньшей мере, один датчик 2210. По меньшей мере, один датчик 2210 может включать камеру, например, камеру 682 или другие датчики 22 или 23. Датчик 2210 может включать датчик силы, датчик присутствия, сенсорный датчик или датчик движения. Датчик 2220 может включать ИИБ для определения ориентации.
[00258] Датчик 2220 может получать изображение материала или заготовки. Датчик 2220 может получать изображения на непрерывной основе, или реагируя на индикацию или команду. Датчик 2220 может, например, принять индикацию посредством интерфейса 2205 о том, что зонд находится в контакте с краем материала. Реагируя на индикацию, датчик 2220 может получать изображение или захватывать другие данные о материале или местоположении зонда 2215, или инструмента относительно материала.
[00259] В некоторых вариантах осуществления настоящего изобретения, датчик 2220 может автоматически устанавливать, когда зонд 2215 входит в контакт с краем материала. Например, датчик 2220 может определить силу или импульс, реагируя на то, как зонд давил на край материала. Реагируя на определение силы, по меньшей мере, один датчик или камера может захватить изображение или сканирование поверхности материала.
[00260] Система 2200 может включать компонент генератора карты 2225. Компонент генератора карты 2225 может включать или быть выполнен вычислительным устройством, например, вычислительным устройством 600. Компонент генератора карты 2225 может установить, на основании идентификации, тот факт, что зонд 2215 находится в контакте с краем материала, положение зонда 2215 относительно материала.
[00261] В некоторых случаях, система 2200 может получить или идентифицировать трехмерные (3D) данные для установления положения. Данные о трехмерном положении данные могут включать координаты X, Y и Z. Система 2200 может устанавливать координаты X-Y, используя, например, маркеры на поверхности материала. Система 2200 может получать данные по оси Z, используя глубину зонда. Система 2200 может использовать накопленные данные о трехмерном положении и известные геометрические параметры зонда 2215 для установления информации о крае материала.
[00262] Компонент генератора карты 2225 может получать и генерировать карту или контур, как продемонстрировано на Фигуре 24. Фигура 24 представляет собой диаграмму, демонстрирующую определение края, в соответствии с вариантом осуществления настоящего изобретения. Например, система может идентифицировать или устанавливать геометрические параметры зонда 2215 как цилиндрические. Пользователь может перемещать ручной инструмент (например, инструмент 1000, интегрированный в систему 2200) таким образом, чтобы зонд 2215 находился в контакте в точкой вдоль края материала 2405. Например, зонд 2215 может входить в контакт с краем материала в точках контакта 2410, 2415 и 2420. Пользователь может неоднократно перемещать ручной инструмент, чтобы войти в контакт с граничными точками 2410, 2415 и 2420. В некоторых случаях, пользователь может непрерывно перемещать ручной инструмент к граничным точкам 2410, 2415 и 2420, или к дополнительным граничным точкам контакта. Система 2200 может комбинировать установленные положения 2410, 2415 и 2520, чтобы сгенерировать цифровую или электронную карту, или контур материала, и сохранить электронную карту или контур в запоминающем устройстве 2235.
[00263] Система 2200 может установить, где на материале 2405 расположены граничные точки 2410, 2415 или 2420. Система 2200 может установить, что граничные точки 2410 и 2415 находятся на краю прямоугольного материала 2405. Например, пользователь может ввести индикацию, свидетельствующую о том, что граничные точки 2410 и 2415 расположены на краю материала 2405. Далее пользователь может ввести данные о том, что точка 2420 расположена на смежном крае материала 2405.
[00264] Далее система 2205 может установить ориентацию инструмента. Например, система 2205 может установить, или она может быть выполнена с наличием информации, которая указывает на то, что инструмент имеет ориентацию относительно плоской грани (например, пластина основания, платформа или корпус инструмента), в результате чего основная ось цилиндра зонда 2215 - перпендикулярна грани. Система 2200 может быть выполнена с наличием этой информации, потому что ручной инструмент может иметь плоскую поверхность, на которую он опирается на грани плоского материала, что усиливает эту ориентацию. Исходя из этих данных, система может установить трехмерные плоскости, в которых лежат края зонда 2410, 2415 или 2420 прямоугольника. Система может устанавливать трехмерные плоскости, используя вычисления, включающие геометрические параметры зонда, например, смещение центра зонда в определенных местоположениях на радиус цилиндрического зонда.
[00265] Система 2200 может генерировать карту или контур материала, или шаблона, двигая зонд 2215 вдоль непрерывного края. Система 2200 может генерировать карту материала или шаблон, который, по меньшей мере, частично изогнут. Система 2200 может генерировать карту, включающую весь контур шаблона или материала, который определен зондом 2215.
[00266] Фигура 25 представляет собой диаграмму, демонстрирующую определение края, в соответствии с вариантом осуществления настоящего изобретения. Фигура 25 демонстрирует материал, заготовку или шаблон 2505. Материал 2505 может иметь край 2510. Зонд 2215 может входить в контакт с краем 2510 материала в точке контакта 2515. Когда зонд 2215 входит в контакт с граничной точкой 2515, то центр зонда, например, цилиндрический зонд, может быть расположен на траектории 2520. Зонд 2215 можно перемещать по траектории 2520. Когда зонд 2215 перемещают по траектории 2520, система 2200 может определить или непрерывно определять положение зонда 2215, как соответствующее траектории 2520. Система 2200 может непрерывно (например, на основании частоты дискретизации, по меньшей мере, 1 Гц, 2 Гц, 5 Гц, 10 Гц, 25 Гц, 50 Гц или 100 Гц) определять положение зонда 2215, когда его перемещают по траектории 2515, смежной с краем 2510. Траектория 2520 может быть смещена от края материала 2510 на радиус зонда 2215. Система 2200 может корректировать это смещение для установления формы материала 2505, как соответствующей краю 2510.
[00267] Система 2200 может принимать (например, посредством интерфейса 2205) индикацию о том, является ли определенный край внутренним отверстием в геометрических параметрах или во внешнем профиле, для того, чтобы сместить центры определенных геометрических параметров зонда в правильном направлении для установления геометрических параметров края зонда. Фигура 26 представляет собой диаграмму, демонстрирующую определение края, в соответствии с вариантом осуществления настоящего изобретения. На Фигуре 26 продемонстрирован шаблон 2605. Шаблон 2605 может быть сформирован из любого материала или маркера, такого как стикеры, бумага, металл или дерево. Шаблон 2605 может включать вырез 2610. Вырез 2610 может находиться внутри шаблона 2605. Вырез 2610 может включать непрерывный край. Система может установить положение зонда 2215, как положение в точке 2620. Зонд 2215 можно перемещать вдоль выреза 2610, и система 2200 может установить положение зонда 2215, как следующее вдоль пунктирной линии 2615. Траектория 2615 может соответствовать центральной точке зонда, смещенной на радиус зонда, если зонд 2215 имеет цилиндрическую форму. Система 2200 может непрерывно (например, на основании частоты дискретизации, по меньшей мере, 1 Гц, 2 Гц, 5 Гц, 10 Гц, 25 Гц, 50 Гц или 100 Гц) определять положение зонда 2215, когда его перемещают по траектории 2615, смежной с краем 2610. Используя определенное положение зонда 2215 вдоль траектории 2615, система 2200 может генерировать данные о крае, карту или данные о контуре выреза 2610. Система 2200 может хранить данные о краях, карту или данные о контуре в запоминающем устройстве 2235.
[00268] Система может использовать определенные свойства, относящиеся к краю (например, 2510, 2520, 2610 или 2615) куска материала (например, 2605 или 2505), для вычисления производных значений. Система 2200 может сформировать сетку, используя эти данные о крае, чтобы определить декартову систему координат с началом координат и осями X и Y, зарегистрированными на поверхности материала. Система 2200 может использовать эту сетку для выравнивания цифровых конструкций по краям материала или для «привязки» цифровых конструкций к ориентации, или для «привязки» вновь созданной формы к сетке. Система 2200 может накладывать сетку на поверхность материала, или предоставлять сетку наложенную на цифровое представление материала. Система 2200 может привязать форму или вновь созданную форму, или конструкцию к сетке. Система 2200 может привязать точки вводных данных для генерирования форм, например, для черчения двух противоположных углов прямоугольника. Сетка может использоваться при создании форм в системе 2200 или инструменте 1000. Положение активной точки привязки относительно установленного начала координат может отображаться на экране дисплея инструмента 1000. Шаг сетки или другие размеры могут быть скорректированы.
[00269] Чертежи, сделанные или захваченные (например, посредством зондирования) в системе 2200 или инструменте 1000, могут быть сохранены в запоминающем устройстве или в другом блоке памяти и позже вызваны или переданы (например, посредством сети или проводной связи) на другие вычислительные устройства или серверы.
[00270] Для того, чтобы начертить другие типы фигур, например, многоугольники или круги, можно использовать возможность их создания на самом инструменте 1000 или в системе 2200. Система 2200 может запускать скрипты для создания форм путем программирования или векторных фигур на основании вводов параметра (например, количества сторон, размеров, углов или длины).
[00271] Система 2200 может использовать граничные данные для создания новой цифровой конструкции, которая впоследствии может быть воспроизведена или отслежена цифровым устройством изготовления. Например, пользователь может предоставить 2D деревянный шаблон, например, шаблон 2605. Зонд 2215 может следовать за краем шаблона 2605 для генерации цифровой конструкции. Затем система 2200 может использовать цифровую конструкцию вместо физического шаблона 2605 при создании объектов, которые включают эту форму.
[00272] Система 2200 может многократно устанавливать данные о крае куска материала и использовать взаимосвязь между двумя кусками, чтобы определить, как переместился кусок материала. Например, цифровое резание могло начаться на куске материала, который позже может быть перемещен до момента завершения цифрового резания. Затем система 2200 может обновить цифровые технические характеристики резания для того, чтобы учесть перемещение, чтобы завершить резание.
[00273] Система 2200 может захватить или получить данные о крае от нескольких сторон материала. Например, плоский кусок материала может быть перевернут. Система 2200 может получить или захватить данные о крае от первой стороны материала и от второй стороны материала, чтобы выровнять захват второго края с захватом первого края. Таким образом, система 2200 может выравнивать цифровое резание для выполнения двусторонней обработки. В некоторых случаях, система 2200 может получать данные о крае для каждой стороны посредством метода бокового зондирования, в то время как в некоторых случаях, система 2200 может получать, по меньшей мере, некоторые из данных о крае от других источников посредством других средств.
[00274] В некоторых вариантах осуществления настоящего изобретения, система 2200 может быть выполнена с помощью метода визуального выравнивания. Например, система 2200 может создавать изображение сверху-вниз, по меньшей мере, участка материала. Система 2200 может создавать такое изображение сверху-вниз при выполнении отслеживания положения, съемки изображения, генерации сетки или при использования другого метода. Если у материала имеется маркер или иной чертеж (например, если пользователь чертит на куске материала, где он хочет вырезать материал), то этот чертеж появится на изображении сверху-вниз, которое можно представить на дисплее или интерфейсе системы 2200, или на инструменте 1000 (например, на экране 572 дисплея). Система 2200 может быть выполнена с наличием инструмента создания формы на устройстве или с наличием предварительно заданного шаблона, чтобы пользователь мог выполнить резание в желаемом местоположении.
[00275] Например, пользователь может поместить объект на поверхность материала. Пользователь может отследить или очертить объект маркером, ручкой или карандашом. Система 2200 может отсканировать поверхность материала с удаленным объектом. Сканирование может включать след или контур объекта, но не сам объект. Система 2200 может включать инструмент для письма на устройстве (например, интерфейс 2205, который пользователь может использовать для цифрового или электронного отслеживания контура при сканировании. Таким образом, система 2200 может создать цифровой эквивалент той же формы, который система 2220 затем может использовать, чтобы направить рабочий элемент на резание материала.
[00276] Система 2200 может быть выполнена с возможностью выполнения различных операций на основании ссылки на чертежи, которые появляются на поверхности куска материала. Система 2200 может выполнить эти операции, используя изображение сверху-вниз в качестве справочного материала для создания цифрового контура или следа на самой системе 2200 или 1000 инструменте.
[00277] В некоторых случаях, система 2200 может автоматически определять и оцифровывать чертежи, используя машинное распознавание образов. Например, система 2200 может отсканировать поверхность материала для создания изображения сверху-вниз или провести сканирование, когда объект продолжает находиться на материале. Система 2200 может использовать методы машинного распознавания образов для автоматической идентификации объекта. Система 2200 может автоматически сгенерировать контур или след объекта, используя методы машинного распознавания образов или визуализации. Система 2200 может отображать автоматически созданный след на дисплее. Система 2200 может принимать индикацию от пользователя посредством интерфейса 2205 для выполнения операции с участком или со всем контуром, например, резание вдоль, по меньшей мере, одной линии или траектории автоматически созданного следа или контура объекта.
[00278] Фигура 23 изображает график последовательности технологических операций для направления инструмента, в соответствии с вариантом осуществления настоящего изобретения. Способ 2300 может быть выполнен, по меньшей мере, одним компонентом системы 2200 или инструментом 1000. Способ может включать инструмент, принимающий команду для создания карты материала на этапе 2305. Инструмент может принимать команду посредством интерфейса от пользователя или от удаленного устройства. Инструмент может принимать дополнительную информацию о параметрах инструмента, материале или зонде, используемых для составления карты материала, например, информацию о геометрических параметрах или размерах.
[00279] На этапе 2310 инструмент может отдать команду двигателю опустить зонд. Инструмент может опустить зонд, реагируя на команду сгенерировать карту. Инструмент может опустить зонд до получения команды генерирования карты. Инструмент может опустить зонд так, чтобы, по меньшей мере, один участок зонда выходил за пределы основания инструмента. Зонд можно опустить так, чтобы зонд выходил за пределы поверхности материала, на который опирается основание инструмента. Зонд можно опустить так, чтобы он был рядом или близко к краю материала, карта которого должна быть составлена.
[00280] На этапе 2315 инструмент может идентифицировать, что зонд находится в контакте с краем материала. Инструмент может содержать, по меньшей мере, один датчик, например, датчик силы или давления, который определяет, что зонд находится в контакте с краем материала. Инструмент может принять индикацию посредством интерфейса о том, что зонд находится в контакте с краем материала, или о том, что зонд расположен в другой точке.
[00281] На этапе 2320 инструмент может установить положение зонда. Инструмент может устанавливать положение, реагируя или исходя из идентификации, свидетельствующей о том, что зонд находится в контакте с краем материала. Инструмент может определять положение относительно поверхности или края материала. Инструмент может установить положение, используя изображения или сканы поверхности материала, которые он сделал, реагируя на индикацию о том, что зонд находится в контакте с краем материала. Инструмент может использовать информацию о положении или ориентацию инструмента для установления трехмерного положения зонда. Например, датчики могут включать ИИБ.
[00282] Инструмент может определять положение зонда относительно материала на основании радиуса зонда. Инструмент может быть запрограммирован с радиусом зонда, или инструмент может принять информацию о радиусе или других геометрических параметрах зонда посредством интерфейса. Инструмент может определять несколько положений зонда, чтобы идентифицировать несколько точек контакта вдоль края материала, и комбинировать эти данные о крае (например, данные о двух- или трехмерном положении) для генерации карты или контура материала.
[00283] Система 2200 может быть выполнена с возможностью генерации разных типов траекторий инструмента или траекторий вырезания. Система 2200 может включать компонент генератора спиральной траектории 2230. Например, траектория резания может быть прямой траекторией резания, или она может относиться к перемещению режущего острия или рабочего элемента инструмента 1000. В некоторых случаях, система 2200 или инструмент 1000 может автоматически генерировать спиральную траекторию инструмента на основании желаемой формы края или формы вырезания. Система 2200 или инструмент 1000 может генерировать спиральную траекторию инструмента в режиме реального времени, которое может относиться непосредственно к самому временному интервалу или к моменту времени, наступающему сразу после (например, в течение 0,5 секунды, 1 секунды, 2 секунд, 5 секунд, 10 секунд или 30 секунд) временного интервала, в течение которого инструмент 1000 режет материал.
[00284] При вырезании отверстия из куска материала, система 2200 может направить режущий наконечник приблизительно вдоль спиральной траектории инструмента. Спиральная траектория инструмента, в отличие, например, от круглой, повторяющейся на нескольких глубинах, может предоставить непрерывное движение без резких ускорений, благодаря чему может быть предоставлен край лучшего качества, и производительность наконечника может быть повышена. Спиральная траектория инструмента может облегчить вырезание круглых отверстий или форм других типов в материалах.
[00285] Система 2200 или инструмент 1000 может принимать и обрабатывать цифровые конструкции, которые идентифицируют или определяют, что должно быть вырезано. Цифровая конструкция может включать, например, файл системы автоматизированного конструирования (CAD). Например, цифровая конструкция может дать указание вырезать круглое отверстие диаметром 0,3 дюйма, которое находится в материале на глубине 0,5 дюйма. Система 2200, инструмент 1000 или компонент генератора спиральной траектории 2230 может быть выполнен с помощью метода системы автоматизированного производства (САМ) для генерации траектории инструмента из цифровой конструкции. Создавая конфигурацию системы 2200 или инструмента 1000 с использованием методов САМ, система 2200 или инструмент 1000 может сгенерировать спиральную траекторию инструмента во время резания.
[00286] Компонент генератора спиральной траектории 2230 может сгенерировать траекторию инструмента, которая представляет собой спираль, которая начинается со смещения радиуса наконечника из желаемого периметра отверстия и спирально спускается до целевой глубины в едином непрерывном перемещении. Таким образом, цифровой ручной инструмент 1000, интегрированный в систему 2200, может генерировать и реализовывать спиральную траекторию инструмента на одном и том же устройстве по ходу работы или в режиме реального времени. Режим реального времени может относиться к моменту времени, наступающему после того, как пользователь предоставит индикацию или команду начать резание материала. Например, режим реального времени может реагировать на то, что пользователь перемещает инструмент рядом с целевым круглым отверстием, а затем предоставлять, посредством интерфейса 2205, команду начать резание. Реагируя на прием команды начать резание, компонент генератора спиральной траектории 2230 может сгенерировать спираль, которая начинается в точке целевого круга, которая находится ближе всего к текущему положению инструмента.
[00287] Фигура 27 представляет собой диаграмму, демонстрирующую спиральную траекторию инструмента, сгенерированную системой 2200, в соответствии с вариантом осуществления настоящего изобретения. Система 2200 может использовать наконечник 2701, чтобы вырезать отверстие 2702. Система 2200 может генерировать спиральную траекторию инструмента, в которой наконечник 2701 перемещают (например, посредством двигателя 19) к ближайшей части 2703 отверстия 2702, затем опускают на поверхность материала 2700, затем опускают по спирали 2704, затем перемещают обратно к центру отверстия 2702, затем втягивают 2705. Эта демонстрация спиральной траектории инструмента не является ограничивающей, поскольку система 2200 может генерировать спиральные траектории других типов в режиме реального времени или по ходу работы.
[00288] Фигуры 28A-28D представляют собой диаграммы, демонстрирующие инструмент, в соответствии с вариантом осуществления настоящего изобретения. В таблице 1 перечислены компоненты системы 2800, которые продемонстрированы на Фигурах 28A-28D. В некоторых вариантах осуществления настоящего изобретения, система 100, система 680, система 1000 или система 2200 может включать, по меньшей мере, один компонент или функциональность, продемонстрированную на Фигурах 28A-28D. Система 2800 может включать, по меньшей мере, один компонент или функциональность системы 100, системы 680, системы 1000 или системы 2200. В некоторых вариантах осуществления настоящего изобретения, система 2800 может включать, по меньшей мере, один интерфейс связи для осуществления связи с другими компьютерными системами посредством сети (например, для отправки и приема данных об изготовлении (например, информации, касающейся разрезов, сделанных на рабочей поверхности), для отправки и приема цифровых конструкций или конструктивных чертежей).
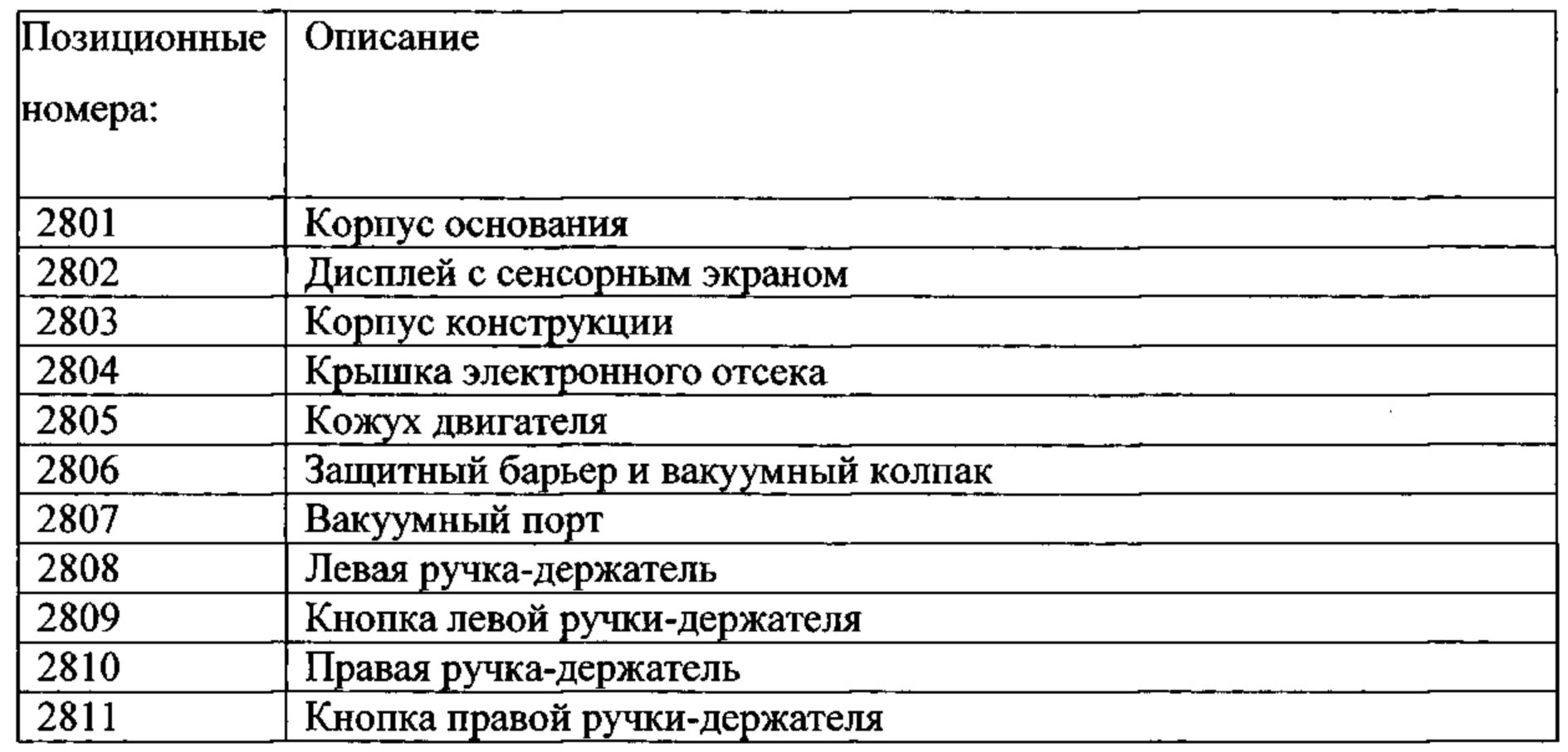

[00289] Таблица 1: Список компонентов инструмента и позиционные номера, продемонстрированные на Фигурах 28A-28D.
[00290] В некоторых вариантах осуществления настоящего изобретения, линейная или торсионная пружина может быть соединена с компонентом платформы позиционирования по оси z (например, с хомутом 2820) для предотвращения, замедления или падения платформы оси z (поддерживается вес двигателя привода шпинделя 2818) при отключении питания, подаваемого на двигатель оси z. В некоторых вариантах осуществления настоящего изобретения, торсионная пружина может быть соединена с валом двигателя по оси z для приложения механического вращающего момента к валу двигателя, даже когда двигатель не включен. В некоторых вариантах осуществления настоящего изобретения, торсионная пружина, соединенная с валом двигателя по оси z, может быть предварительно натянута, чтобы поддерживать приложенный механический вращающий момент в фиксированном диапазоне в пределах диапазона перемещения по оси z.
[00291] На Фигуре 28А продемонстрирован маршрутизатор, состоящий из элементов, включающих электромеханическую платформу, которая перемещает хомут 2820 в направлениях X, Y и Z под автоматическим управлением. Двигатель привода шпинделя 2818 может быть прикреплен к каретке посредством цилиндрического усилия зажима в хомуте 2820. Такое расположение может позволить хомуту адаптировать вариант производства изделия в диаметре двигателя привода шпинделя. Маршрутизатор может включать защитный барьер и пылезащитный кожух 2806, которые могут удерживаться магнитными защелками 2819; ручки-держатели 2808 и 2810 с кнопками управления 2809 и 2811, которые позволяют пользователю взаимодействовать с кодом, который запускается, по меньшей мере, на одном процессоре; вакуумный порт 2807 для взаимодействия со шлангами пылеуловителя; дисплей с сенсорным экраном 2802, который позволяет пользователю взаимодействовать с кодом, который запускается, по меньшей мере, на одном процессоре; башню конструкции 2803, в которой также размещается электронный отсек; крышку электронного отсека 2804; кожух 2805 для защиты внутренних компонентов, включая двигатели; и корпус основания 2801. Защитному барьеру 2806 и вакуумному порту 2807 можно придать форму, улучшающую захват обрезок, а также направление обрезок из апертуры инструмента 2821, где режущий инструмент генерирует обрезки, в вакуумный порт 2807.
[00292] В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, одна ручка-держатель (например, 2808, 2810) системы 2800 может включать, по меньшей мере, одно из следующего: кнопку управления (например, 2809, 2811), колесо прокрутки, многоступенчатую кнопку, индикатор светодиодов, клавишу - переключатель направления, джойстик, сенсорную панель, датчик силы зажима, триггер, биометрический (например, отпечатков пальцев, распознавания по радужке глаз, распознавания по лицу) датчик или другое устройство ввода данных. Например, правая ручка-держатель может иметь две кнопки управления и три индикатора светодиодов, а левая ручка-держатель может иметь сенсорную панель и колесо прокрутки. В некоторых вариантах осуществления настоящего изобретения, кнопка управления может, на основании текущего состояния системы 2800 (например, режима выбора конструкции, режима регистрации конструкции, режима резания), быть запрограммирована для выполнения, по меньшей мере, одного из следующего: включение рабочей функции рабочего элемента (например, включение двигателя привода шпинделя 2818, если система 2800 находится в режиме резания, опускание инструмента для черчения для того, чтобы он вошел в контакт с рабочей поверхностью, если система 2800 представляет собой инструмент для черчения), выключение рабочей функции рабочего элемента (например, выключение двигателя привода шпинделя 2818), триггерное переключение рабочей функции рабочего элемента, погружение рабочего элемента в рабочую поверхность или втягивание рабочего элемента с рабочей поверхности. В некоторых вариантах осуществления настоящего изобретения, колесо прокрутки может, на основании текущего состояния системы 2800, быть запрограммировано для выполнения, по меньшей мере, одного из следующего: изменение скорости рабочей функции рабочего элемента (например, изменение скорости двигателя привода шпинделя 2818 в системе 2800), изменение содержания, показанного на дисплее, соединенном с системой 2800 (например, изменение масштаба увеличения вида, показанного на дисплее с сенсорным экраном 2802 в системе 2800, изменение местоположения отображенных данных в формате файлов ARD или VRD, соединенных с системой 2800), прокрутка меню в пользовательском интерфейсе, показанном на дисплее, соединенном с системой 2800 (например, если система 2800 находится в режиме выбора конструкции) или изменение z-положения рабочего элемента. В некоторых вариантах осуществления настоящего изобретения, индикатор светодиодов может указывать, по меньшей мере, на одно из следующего: состояние электропитания рабочего элемента (например, красный свет - для включения двигателя привода шпинделя 2818, а зеленый свет - для выключения двигателя привода шпинделя 2818), скорость рабочей функции рабочего элемента (например, изменение света зеленый-желтый-красный - для изменения скорости двигателя привода шпинделя 2818, обозначая таким образом выключенное состояние - низкую скорость - высокую скорость) или состояние рабочего элемента (например, зеленый свет - для рабочего элемента, втянутого с рабочей поверхности, а красный свет - для рабочего элемента, погруженного в рабочую поверхность). В некоторых вариантах осуществления настоящего изобретения, клавиша - переключатель направления, джойстик или сенсорная панель может, на основании текущего состояния системы 2800, быть запрограммирована для выполнения, по меньшей мере, одного из следующего: перемещение по пользовательскому интерфейсу, показанному на дисплее, соединенном с системой 2800, перемещение рабочего элемента в пределах диапазона регулировки системы 2800 или продвижение, или втягивание рабочего элемента с рабочей поверхности. В некоторых вариантах осуществления настоящего изобретения, датчик силы зажима может определить узор ладони пользователя на ручке-держателе или давление захвата пользователя на ручке-держателе. В некоторых вариантах осуществления настоящего изобретения, датчик силы зажима может использовать, по меньшей мере, один сенсорный механизм: оптический, силовой, емкостный, сопротивления, давления или любой другой сенсорный механизм для определения захвата пользователя. В некоторых вариантах осуществления настоящего изобретения, нажимное устройство ввода данных триггерного типа на ручке-держателе может использоваться для управления скоростью рабочей функции рабочего элемента (например, для управления скоростью двигателя привода шпинделя 2818). В некоторых вариантах осуществления настоящего изобретения, биометрический датчик (например, на ручке-держателе, на корпусе инструмента) может ограничить использование или ограничить функциональность, доступную, по меньшей мере, одному пользователю (например, пользователю, зарегистрированному на инструменте, пользователю, зарегистрированному в компьютерной системе, которая администрирует доступ пользователей к инструменту).
[00293] В некоторых вариантах осуществления настоящего изобретения, система 2800 может быть запрограммирована для подтверждения того факта, что каждая из рук пользователя захватывает оба датчика силы зажима (по одному на каждой ручке-держателе) перед активацией функциональности инструмента (например, перед включением двигателя привода шпинделя 2818). В некоторых вариантах осуществления настоящего изобретения, ручки-держатели могут иметь разную форму для работы на разных рабочих поверхностях (например, конструкция с одной ручкой-держателем, когда система 2800 используется для работы на горизонтальной поверхности, и другая конструкция, отличная от конструкции с одной ручкой-держателем, когда система 2800 используется для работы на вертикальной поверхности).
[00294] В некоторых вариантах осуществления настоящего изобретения, система 2800 может быть спроектирована таким образом, чтобы можно было производить замену ручек-держателей для обеспечения дополнительной или другой функциональности. В некоторых вариантах осуществления настоящего изобретения, система 2800 может иметь электрические (например, использующие коннекторы на блоке управления процессом) и механические интерфейсы, спроектированные для соединения с различными ручками-держателями. В некоторых вариантах осуществления настоящего изобретения, система 2800 может связываться с ручкой-держателем, используя I2C (взаимно интегрированную цепь), USB, Bluetooth или другой протокол передачи данных. В некоторых вариантах осуществления настоящего изобретения, ручки-держатели могут быть прикреплены к инструменту механическим образом с помощью монтажных отверстий в корпусе основания 2801 В некоторых вариантах осуществления настоящего изобретения, ручка-держатель может быть заменяемой в горячем режиме (например, ее можно соединять с системой 2800 или отсоединять от нее, когда система 2800 включена). В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор может исполнять команды, хранящиеся, по меньшей мере, в одном блоке памяти, чтобы заставить систему 2800 разрешить или отключать функциональность, относящуюся, по меньшей мере, к одному устройству ввода данных на ручке-держателе, или заставить систему 2800 разрешить или отключить функциональность путем определения заложенного потенциала на подсоединенной ручке-держателе. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может загружать программное обеспечение на дополнительные процессоры, расположенные во взаимозаменяемой ручке-держателе для замены или обновления функциональности ручки-держателя.
[00295] В некоторых вариантах осуществления настоящего изобретения, защитный барьер и пылезащитный кожух 2806 могут механическим образом запустить, по меньшей мере, один переключатель (например, переключатель на основе эффекта Холла, герконовый переключатель) для определения удаления или неправильного позиционирования защитного барьера и пылезащитного кожуха 2806. В некоторых вариантах осуществления настоящего изобретения, состояние, по меньшей мере, одного переключателя определяет позиционирование защитного барьера и пылезащитного кожуха 2806. В некоторых вариантах осуществления настоящего изобретения, состояние, по меньшей мере, одного переключателя может использоваться для включения или отключения, по меньшей мере, одной функциональности системы 2800. В некоторых вариантах осуществления настоящего изобретения, защитный барьер и пылезащитный кожух 2806 могут отключить, по меньшей мере, один переключатель для обозначения новой функциональности (например, вентилятора, камеры, вентиляционного отверстия), относящейся к защитному барьеру и пылезащитному кожуху 2806.
[00296] На Фигуре 28В продемонстрирован инструмент с ручкой-держателем для подъема 2812; порт USB 2813 для взаимодействия, по меньшей мере, с одним процессором; съемный поддон для стружки 2814, который позволяет пользователю легко удалять любые обрезки, которые накапливается позади подвижных элементов подвижной платформы в области для удаления стружки 2817 (например, на Фигуре 28D).
[00297] На Фигуре 28С показаны дополнительные элементы инструмента, включая светодиодные матрицы 2815, используемые для освещения заготовки, и камеру 2816, которая используется при нормальной работе устройства. В некоторых вариантах осуществления настоящего изобретения, светодиодные матрицы 2815 могут освещать заготовку с использованием длин волн излучения в видимой области спектра (например, белого света). В некоторых вариантах осуществления настоящего изобретения, светодиодные матрицы 2815 могут освещать заготовку с использованием длин волн излучения в невидимой области спектра (например, ультрафиолетовой, инфракрасной областей спектра).
[00298] На Фигуре 28D показана область для удаления стружки 2817 со снятым поддоном для стружки 2814.
[00299] В некоторых вариантах осуществления настоящего изобретения, симистор в электронной системе шпинделя может управлять скоростью двигателя привода шпинделя 2818 (например, коллекторный универсальный двигатель переменного/постоянного тока), используя управление фазовым углом. В частности, в некоторых вариантах осуществления настоящего изобретения, симистор включает и выключает питание переменного тока, подаваемого на обмотки шпинделя, в соответствии с определенным временным режимом. Симистор может «вызывать пульсацию» мощности переменного тока, незаметным для человека образом. Используя схему для измерения тока, потребляемого шпинделем, можно определить, по меньшей мере, одним процессором в системе 2800, импульсную последовательность, используемую для вращения двигателя привода шпинделя 2818 при запуске. В некоторых вариантах осуществления настоящего изобретения, обмотки ротора и статора двигателя привода шпинделя выполнены в соответствии с ожидаемым напряжением переменного тока, подаваемым на двигатель для достижения желаемой номинальной мощности и скорости. В некоторых вариантах осуществления настоящего изобретения, конфигурация обмотки для двигателя привода шпинделя, спроектированного для приведения в движение при напряжении, приблизительно, 120 В переменного тока, отличается от конфигурации обмотки для двигателя привода шпинделя, спроектированного для приведения в движение при напряжении, приблизительно, 230 В переменного тока. В некоторых вариантах осуществления настоящего изобретения, определенная импульсная последовательность предоставляет индикацию об обмотках ротора и статора двигателя привода шпинделя. Используя указанную информацию об обмотках вместе с измеренным напряжением сети питания переменного тока, подаваемым в систему 2800, в некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может установить, соответствуют ли проектные технические характеристики напряжения двигателя привода шпинделя 2818 напряжению сети питания переменного тока (измеряется с использованием схемы измерения напряжения), подаваемому на двигатель привода шпинделя 2818. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может запустить, по меньшей мере, одно действие, если проектные технические характеристики напряжения двигателя привода шпинделя 2818 не соответствуют напряжению сети питания переменного тока, подаваемому на двигатель привода шпинделя 2818. В некоторых вариантах осуществления настоящего изобретения, запущенное действие может включать: выключение питания, поданного на двигатель привода шпинделя 2818, побуждение дисплея (например, дисплея с сенсорным экраном 2802) выдать уведомление пользователю или изменить скорость двигателя привода шпинделя 2818.
[00300] В некоторых вариантах осуществления настоящего изобретения, система (например, система 2800) может отображать информацию на дисплее со средой дополненной реальности («ARD», включая дисплей со средой передаваемой смешанной реальности, например, головой дисплей со средой дополненной реальности (например, Google Glass), головной дисплей со средой смешанной реальности (например, Microsoft HoloLens)) или на дисплее со средой виртуальной реальности («VRD», например, головной дисплей со средой виртуальной реальности (например, Vive, Facebook Oculus, Sony PlayStation VR)), соединенном, по меньшей мере, с одним процессором в системе. В некоторых вариантах осуществления настоящего изобретения, ARD может использоваться для отображения вида сверху области вокруг рабочего элемента. В некоторых вариантах осуществления настоящего изобретения, ARD может указывать диапазон регулировки рабочего элемента. В некоторых вариантах осуществления настоящего изобретения, ARD может указывать участок траектории рабочего элемента или участок конструкции. В некоторых вариантах осуществления настоящего изобретения, ARD может указывать всю траекторию рабочего элемента или всю конструкцию. В некоторых вариантах осуществления настоящего изобретения, ARD может указывать текущее положение рабочего элемента с помощью «X», круга, точки, иконки или любою другую индикацию для сигнала. В некоторых вариантах осуществления настоящего изобретения, текущее положение рабочего элемента может быть указано относительно диапазона регулировки рабочего элемента, траектории рабочего элемента или конструктивного чертежа. В некоторых вариантах осуществления настоящего изобретения, данные, относящиеся к системе (например, диапазон регулировки рабочего элемента, участок траектории рабочего элемента, участок конструкции, индикация о текущем положении рабочего элемента), могут быть зафиксированы или «прикреплены» к местоположению, относящемуся к положению системы, по мере того, как владелец ARD перемещает ARD (например, перемещает свою голову вместе с ARD, укрепленной на голове). В некоторых вариантах осуществления настоящего изобретения, данные, относящиеся к системе, могут быть зафиксированы или «прикреплены» к рабочей поверхности, по мере того, как владелец ARD перемещает ARD (например, перемещает свою голову вместе с ARD, укрепленной на голове). В некоторых вариантах осуществления настоящего изобретения, данные, относящиеся к системе, могут перемещаться относительно положения системы, по мере того, как владелец ARD перемещает свою голову. В некоторых вариантах осуществления настоящего изобретения, в приведенном выше описании, VRD используется вместо ARD.
[00301] Вместо использования компьютера для создания конструктивного чертежа, некоторые пользователи, возможно, захотят сделать измерения на рабочей поверхности и создать шаблон, который определяет конструктивный чертеж. В некоторых вариантах осуществления настоящего изобретения, система 680 может использовать сгенерированный пользователем шаблон на рабочей поверхности для определения конструктивного чертежа. Сначала, как показано на Фигурах 30A-D, пользователь может начать с укладки пленки 3020 поверх рабочей поверхности 3010. В некоторых вариантах осуществления настоящего изобретения, пленка может иметь клейкую подложку и может прилипать к рабочей поверхности. Пользователь может делать измерения на рабочей поверхности 3010 и делать разрезы в пленке 3020 для определения шаблона для конструктивного чертежа. Например, пользователь может вырезать квадратную форму в пленке 3020, удалить внутренний участок пленки 3020, чтобы сформировать квадратную форму 3030 в пленке 3020, и создать шаблон для конструктивного чертежа, как показано на Фигуре 30В. Если пользователь хочет изменить шаблон, например, если шаблон должен быть прямоугольным, а не квадратным, то пользователь может добавить дополнительную пленку сверху и изменить шаблон, как показано на Фигуре 30С. В этом примере, пользователь добавляет пленку 3040, чтобы накрыть участок шаблона 3030, сформированный на Фигуре 30В. На Фигуре 30D показан окончательный шаблон 3050 после того, как пользователь сделает дополнительные разрезы в пленке 3040, чтобы сформировать прямоугольный шаблон для конструктивного чертежа. На Фигуре 30D края А, В и С пленки 3020 и края D, Е и F пленки 3040 определяют форму конечного шаблона 3050. Область, в которой были удалены пленки (3020 и 3040), отмечена как область 3060 (показана белым цветом).
[00302] В некоторых вариантах осуществления настоящего изобретения, шаблон для конструктивного чертежа может быть создан после того, как карта рабочей поверхности уже создана. Если метки или маркеры на рабочей поверхности используются для создания карты, в некоторых вариантах осуществления настоящего изобретения, то пленка может быть частично прозрачной, чтобы система 680 могла использовать метки или маркеры для позиционирования после того, как пленка была нанесена на рабочую поверхность. Если карта уже создана, то используется, по меньшей мере, одна камера для захвата изображений рабочей поверхности, включая пленку и шаблон. В некоторых вариантах осуществления настоящего изобретения, захваченные изображения анализируют для идентификации желаемой траектории на основании, по меньшей мере, одного края шаблона, например, шаблона 3050 на Фигуре 30D. В некоторых вариантах осуществления настоящего изобретения, захваченные изображения анализируют, чтобы идентифицировать конструктивный чертеж на основании, по меньшей мере, одного края шаблона, например, шаблона 3050 на Фигуре 30D. В некоторых вариантах осуществления настоящего изобретения, желаемая траектория для адаптера, удерживающего рабочий элемент, определяется на основании конструктивного чертежа. В некоторых вариантах осуществления настоящего изобретения, желаемая траектория может быть частично основана на физических геометрических параметрах адаптера, удерживающего рабочий элемент (например, на основании положения рабочего элемента относительно адаптера). В некоторых вариантах осуществления настоящего изобретения, желаемая траектория может быть частично основана на физическом размере рабочего элемента (например, на ширине режущего наконечника). В некоторых вариантах осуществления настоящего изобретения, желаемая траектория может быть частично основана на вводе данных, осуществляемом пользователем, например, на вводе данных, указывающих, что пользователь хочет, чтобы центр рабочего элемента лежал на краю шаблона, или на вводе данных, указывающих, что пользователь хочет, чтобы край рабочего элемента лежал рядом с краем шаблона, когда рабочий элемент находится во внутреннем белом пространстве 3060 на Фигуре 30D. В некоторых вариантах осуществления настоящего изобретения, желаемая траектория зарегистрирована или иным образом связана с картой.
[00303] В некоторых вариантах осуществления настоящего изобретения, карта рабочей поверхности может быть создана после того, как шаблон уже создан пользователем. В некоторых вариантах осуществления настоящего изобретения, пользователь может добавлять метки или маркеры (например, узорчатую ленту, стикеры) на рабочую поверхность. В некоторых вариантах осуществления настоящего изобретения, метки или маркеры (например, закодированные шаблоны) могут быть напечатаны на пленке или включены в нее. По меньшей мере, одна камера может использоваться для захвата изображений рабочей поверхности, включая шаблон и любые имеющиеся метки/маркеры. Захваченные изображения могут быть использованы для создания карты рабочей поверхности. Захваченные изображения могут использоваться для установления желаемой траектории для адаптера, удерживающего рабочий элемент. В некоторых вариантах осуществления настоящего изобретения, желаемая траектория зарегистрирована или иным образом связана с картой.
[00304] В некоторых вариантах осуществления настоящего изобретения, пленка может быть уже вырезана для того, чтобы форма и размер соответствовали шаблону. Например, производитель продукта может предоставить пленку, в которой предварительно сделаны вырезы (например, вырезанный шаблон) для установки своего продукта (например, светильника, встраиваемого в потолок или стену). В другом примере, пользователь, который устанавливает один и тот же продукт, зачастую может поставить задачу, чтобы третья сторона изготовила шаблоны пленки на основании размеров продукта. В некоторых вариантах осуществления настоящего изобретения, можно выбрать отражательную способность, цвет или узор пленки для улучшения видимости или контрастности относительно меток/маркеров на рабочей поверхности или на поверхности заготовки. В некоторых вариантах осуществления настоящего изобретения, пленка может включать высококонтрастный неповторяющийся узор, в результате чего узор можно использовать для создания карты для рабочей поверхности. Затем, после того, как изображение будет получено, можно использовать изображение участка узора для установления положения камеры, путем сопоставления информации об узоре в изображении с информацией об узоре на карте. В некоторых вариантах осуществления настоящего изобретения, пленка может быть изготовлена, по меньшей мере, из одного слоя материала (например, винила, бумаги) и может включать клейкую подложку. В некоторых вариантах осуществления настоящего изобретения, пленка может включать узор сетки с шагом сетки (например, 1 дюйм, 0,5 дюйма, 0,25 дюйма, 0,125 дюйма, 0,0625 дюйма), чтобы пользователи могли использовать узор сетки для измерения расстояний, используя узор сетки. В некоторых вариантах осуществления настоящего изобретения, узор сетки может использовать, по меньшей мере, две толщины линий (например, толстые линии для маркировки в 1 дюйм и более тонкие линии для маркировки в 0,125 дюйма).
[00305] Некоторые пользователи могут захотеть просто поместить печатную конструкцию на рабочей поверхности, чтобы обозначить свое желание о том, что они хотят работать с этой конструкцией в этом местоположении, используя систему (например, систему 680). В некоторых вариантах осуществления настоящего изобретения, камера в системе может отсканировать печатную конструкцию для генерации конструктивного чертежа на основании печатной конструкции. Вместо этого, в некоторых вариантах осуществления настоящего изобретения, пользователь может поместить маркер конструкции с узором, имеющим закодированную информацию (например, штрих-код, 2D-код, QR-код), на рабочую поверхность, чтобы указать размещение конструктивного чертежа (например, используя идентификатор конструкции, включенный в закодированную информацию) в местоположении (например, в местоположении относительно маркера конструкции, включенного в закодированную информацию) на рабочей поверхности. В некоторых вариантах осуществления настоящего изобретения, маркер конструкции также может использоваться системой в качестве маркера для создания карты или для позиционирования. В некоторых вариантах осуществления настоящего изобретения, пользователь может распечатать лист бумаги с маркером конструкции и соответствующей конструкцией для того, чтобы увидеть, где будет расположен конструктивный чертеж относительно маркера конструкции и увидеть конструктивный чертеж, на который ссылается маркер конструкции. В некоторых вариантах осуществления настоящего изобретения, пользователь может разместить распечатанный лист бумаги с маркером конструкции и конструктивным чертежом на рабочей поверхности.
[00306] В некоторых вариантах осуществления настоящего изобретения, камера в системе (например, в системе 680) может захватывать изображение маркера конструкции на рабочей поверхности. В некоторых вариантах осуществления настоящего изобретения, процессор в системе может анализировать захваченное изображение, чтобы идентифицировать маркер конструкции и декодировать узор маркера конструкции, чтобы установить идентификатор конструкции и местоположение соответствующего конструктивного чертежа на основании положения маркера конструкции на рабочей поверхности. В некоторых вариантах осуществления настоящего изобретения, процессор в системе может анализировать захваченное изображение, чтобы идентифицировать маркер конструкции и декодировать узор маркера конструкции, чтобы установить идентификатор конструкции и местоположение соответствующего конструктивного чертежа на основании положения распечатанной конструкции (если имеется) относительно маркера распечатанной конструкции. В некоторых вариантах осуществления настоящего изобретения, информация, закодированная в маркере конструкции, может включать местоположение (и информацию о доступе), откуда конструктивный чертеж, идентифицированный по идентификатору конструкции, может быть получен системой (например, из блока памяти в системе, с веб-сервера по данному электронному адресу размещения (URL), с сервера, используя предоставленные учетные данные и адрес сервера). В некоторых вариантах осуществления настоящего изобретения, идентификатор конструкции может определить конструктивный чертеж, используя формат присвоенного имени (например, идентификатор конструкции «Circle_r8», соответствующий окружности с радиусом 8 дюймов для конструктивного чертежа). В некоторых вариантах осуществления настоящего изобретения, система может генерировать желаемую траекторию для адаптера, удерживающего рабочий элемент, на основании идентификатора конструкции или конструктивного чертежа.
[00307] В некоторых вариантах осуществления настоящего изобретения, маркер конструкции может использоваться для конфигурации системы координат, используемой системой (например, системой 680) для создания карты и позиционирования. В некоторых вариантах осуществления настоящего изобретения, пользователь может поместить маркер конструкции с узором, в котором имеется закодированная информация (например, штрих-код, 2D-код, QR-код), в данном местоположении в рабочей системе, чтобы сообщить системе о том, что пользователь хотел бы использовать положение маркера конструкции в качестве начала системы координат для создания карты и позиционирования. Информация, закодированная в маркере конструкции, будет указывать на то, что маркер конструкции также определяет местоположение начала системы координат. В некоторых вариантах осуществления настоящего изобретения, пользователь может поместить маркер конструкции с узором, в котором имеется закодированная информация (например, штрих-код, 2D-код, QR-код), в данном местоположении в рабочей системе, чтобы сообщить системе о том, что пользователь хотел бы использовать определенную ориентацию для осей координат для создания карты и позиционирования. Информация, закодированная в маркере конструкции, будет означать, что маркер конструкции также определяет ориентацию осей координат.
[00308] Варианты осуществления настоящего изобретения, раскрытые в настоящем документе, предоставляют пользователю гибкость при работе в реальном пространстве (например, с рабочей поверхностью или на ней) или в конструктивном пространстве (например, работая в конструктивной среде (например, используя чертеж, CAD или аналогичную программу) с использованием конструктивных чертежей). В некоторых вариантах осуществления настоящего изобретения, система 2800 может включать код программного обеспечения в блоке памяти, который, при исполнении, по меньшей мере, одним процессором, позволяет пользователю работать в конструктивной среде в системе. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может хранить журнал регистрации отслеживания действий системы, при этом журнал регистрации и любые ссылочные данные хранятся, по меньшей мере, в одном блоке памяти в системе 2800 или хранятся, по меньшей мере, в одном блоке памяти в компьютерной системе, отличной от системы 2800. В некоторых вариантах осуществления настоящего изобретения, журнал регистрации позволяет пользователю использовать информацию, сгенерированную в реальном пространстве (например, местоположение разреза, выполненного на рабочей поверхности), чтобы внести соответствующие изменения в конструктивное пространство (например, в местоположение края, соответствующего разрезу, выполненному на рабочей поверхности) и наоборот. Используемый в настоящем документе термин «журнал регистрации» может относиться к записи данных, которые хранятся в любом формате (например, в виде структурированных и неструктурированных данных, в виде комбинации структурированных и неструктурированных данных) для обработки с помощью компьютерной системы. Например, журнал регистрации может представлять собой структурированную запись, включающую данные, соответствующие элементам (например, событиям, действиям), которые хранятся в данном формате и включают информацию для каждого элемента. В другом примере, журнал регистрации может представлять собой совокупность данных, соответствующих элементам, хранящимся в компьютерной системе. В некоторых вариантах осуществления настоящего изобретения, данные журнала регистрации по данному элементу могут отслеживаться с помощью идентификатора журнала регистрации.
[00309] В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор может хранить данные в журнале регистрации на основании того, что система 2800 выключена. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор может хранить данные в журнале регистрации на основании сканирования рабочей поверхности для генерации карты. В некоторых вариантах осуществления настоящего изобретения, зарегистрированные в журнал данные о генерации карты, могут иметь дополнительные данные, связанные с ней (например, список маркеров (например, положение и ориентация глобального списка маркеров на рабочей поверхности), изображение, показывающее область сканирования рабочей поверхности, размеры сканируемой области). В некоторых вариантах осуществления настоящего изобретения, связанные данные могут храниться в журнале регистрации, или они могут хранятся отдельно (с журналом регистрации, включая ссылку на сохраненные данные). Ссылка может представлять собой имя (например, имя карты, имя конструктивного чертежа), ссылку (например, гиперссылку), траекторию (например, местоположение файловой системы) или тому подобное. В некоторых вариантах осуществления настоящего изобретения, ссылка может идентифицировать местоположение дополнительной информации (например, в блоке локальной памяти, в локальном запоминающем устройстве, в удаленном запоминающем устройстве).
[00310] В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может хранить данные в журнале регистрации на основании регистрации конструктивного чертежа на карте, при этом данные содержат или включают ссылку на дополнительную информацию (например, конструктивный чертеж, информацию о местоположении, указывающую где конструктивный чертеж был размещен относительно карты или рабочей поверхности). В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор может хранить данные в журнале регистрации на основании генерации траектории, основанной на конструктивном чертеже, при этом данные содержат или включают ссылку на дополнительную информацию (например, идентификатор траектории (если конструктивный чертеж включает несколько траекторий), конструктивный чертеж, физические размеры рабочего элемента, используемые для генерации траектории, пользовательский ввод данных, указывающий положение рабочего элемента относительно конструктивного чертежа, местоположение траектории относительно карты, местоположение траектории относительно рабочей поверхности).
[00311] В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может хранить данные в журнале регистрации на основании работы (например, резки, черчения, маркирования, зондирования), выполненной на рабочей поверхности (например, на основании траектории), при этом данные содержат или включают ссылку на дополнительную информацию (например, на идентификатор траектории (если конструктивный чертеж включает несколько траекторий), на конструктивный чертеж, на глубину резания рабочего элемента, на смещение между рабочим элементом и адаптером, на рабочие параметры рабочего элемента или адаптера (например, на скорость вращения, на кинематические данные (например, на положение, скорость, ускорение или на связанные данные) относительно установки, карты или рабочей поверхности), на параметры, относящиеся к перемещению установки (например, на кинематические данные (например, на положение, скорость, ускорение или связанные данные)) относительно карты или рабочей поверхности, на ориентацию установки относительно карты или рабочей поверхности)). В некоторых вариантах осуществления настоящего изобретения, рабочие параметры рабочего элемента или параметры, относящиеся к перемещению установки, хранятся в качестве функции времени по мере выполнения работы (например, по мере того, как выполняется разрез).
[00312] В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может использовать информацию в журнале регистрации или данные, на которые ссылается журнал регистрации, для обновления состояния системы (например, чтобы показать изображение рабочей поверхности с указанием зарегистрированного конструктивного чертежа или уже выполненного разреза) или для того, чтобы сделать доступными для пользователя определенные элементы пользовательского интерфейса (например, включить опцию создания траектории, если журнал регистрации показывает, что конструктивный чертеж зарегистрирован на карте). В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может передавать данные (например, участки журнала регистрации или данные, на которые ссылается журнал регистрации) во внешнюю компьютерную систему (например, путем передачи данных на съемное запоминающее устройство, путем передачи данных посредством интерфейса связи, функционально соединенного с процессором в системе 2800). В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может принимать данные (например, участки журнала регистрации или данные, на которые ссылается журнал регистрации) от удаленной компьютерной системы (например, от другого инструмента).
[00313] На Фигуре 31 показана схема сетевого подключения 6 компьютерных систем (3 инструмента Tool1 3110, Tool2 3120 и Tool3 3130, и 3 компьютерные системы ComputerSystem1 3140, ComputerSystem2 3150 и ComputerSystem3 3160), соединенных друг с другом посредством сети 3170. В некоторых вариантах осуществления настоящего изобретения, доступ, по меньшей мере, к одному инструменту и компьютерной системе, показанным на Фигуре 31, может быть ограничен на основании, по меньшей мере, одних учетных данных пользовательского уровня, системного уровня или других (например, на основании данных предприятия) учетных данных (например, доступ на основании пароля, аутентификация на основании оборудования). В некоторых вариантах осуществления настоящего изобретения, данный инструмент (например, Tool1 3110) может напрямую связываться, по меньшей мере, с одной другой системой (например, Tool2 3120, ComputerSystem3 3160) для передачи или приема данных (например, участка журнала регистрации, данных, на которые имеется ссылка в журнале регистрации, конструктивного чертежа). В некоторых вариантах осуществления настоящего изобретения, первая компьютерная система (например, Tool1 3110) и вторая компьютерная система (например, Tool2 3120) могут передавать или принимать данные через посредническую компьютерную систему (например, ComputerSystem2 3150, Tool3 3130). В некоторых вариантах осуществления настоящего изобретения, данная компьютерная система (например, Tool1 3110) может принимать первые данные из первой компьютерной системы (например, ComputerSystem1 3140, Tool2 3120) и передавать вторые данные во вторую компьютерную систему (например, ComputerSystem2 3150, Tool3 3130). В одном варианте осуществления настоящего изобретения, Tool1 3110, Tool2 3120 и ComputerSystem2 3150 могут хранить данные в ComputerSystem1 3140. В этом варианте осуществления настоящего изобретения, на основании политики доступа, применяемой системой ComputerSystem1 3140, инструменты Tool1 3110 и Tool2 3120 могут иметь доступ к собственным данным, к данным, хранящимися другими устройствами, и к данным, хранящимися системой ComputerSystem2 3150 в системе ComputerSystem1 3140. Однако система ComputerSystem2 3150 может иметь доступ только к собственным данным и данным, хранящимися инструментом Tool2 3120 в системе ComputerSystem1 3140.
[00314] Хранение действий системы позволяет отслеживать изменения конструкции, сделанные во время изготовления. В частности, изменения, сделанные во время изготовления (например, для адаптации детали приспособления на основании изготовленного образца), могут храниться в журнале регистрации. Сохраненные изменения могут быть обработаны, по меньшей мере, одним процессором в системе 2800 или, по меньшей мере, одним процессором в другой компьютерной системе для обновления конструктивного чертежа на основании изменений, сделанных во время изготовления, для успешного изготовления фактической детали. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может хранить данные в журнале регистрации на основании модификации оригинального конструктивного чертежа для создания модифицированного конструктивного чертежа. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может хранить данные в журнале регистрации на основании установления модифицированной траектории на основании модифицированного конструктивного чертежа. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может хранить данные в журнале регистрации на основании установления оригинальной траектории на основании оригинального конструктивного чертежа. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может хранить данные в журнале регистрации на основании модификации оригинальной траектории для создания модифицированной оригинальной траектории. В некоторых вариантах осуществления настоящего изобретения, система 2800 или другая компьютерная система может использовать хранимую информацию из журналов регистрации для того, чтобы обновить локальную или дистанционную копию оригинального конструктивного чертежа на основании записанных в журнал регистрации изменений, сделанных в оригинальном конструктивном чертеже, на основании записанных в журнал регистрации данных для модифицированной траектории или на основании записанных в журнал регистрации изменений, сделанных в оригинальной траектории.
[00315] В некоторых случаях, генерация новой траектории может быть инициирована пользователем системы 2800, если пользователь хочет изменить или переместить оригинальную траекторию. В некоторых вариантах осуществления настоящего изобретения, данные, относящиеся к записанной в журнал новой траектории или к записанному в журнал разрезу на основании новой траектории, могут использоваться, по меньшей мере, одним процессором в системе 2800 или, по меньшей мере, одним процессором в другой компьютерной системе для обновления конструктивного чертежа, соответствующего оригинальной траектории. В некоторых вариантах осуществления настоящего изобретения, обновленный конструктивный чертеж может заменить оригинальный конструктивный чертеж. В некоторых вариантах осуществления настоящего изобретения, обновленный конструктивный чертеж может храниться как новый конструктивный чертеж. В некоторых вариантах осуществления настоящего изобретения, данные, относящиеся к записанной в журнал новой траектории или к записанному в журнал разрезу на основании новой траектории, могут использоваться, по меньшей мере, одним процессором в системе 2800 или, по меньшей мере, одним процессором в другой компьютерной системе для обновления соответствующего конструктивного чертежа в конструктивной среде (например, в чертежной программе, CAD или в аналогичной программе). В некоторых вариантах осуществления настоящего изобретения, конструктивная среда может выводить данные (например, журнал регистрации или связанные данные, относящиеся к изменениям, сделанным в конструктивной среде, конструктивный чертеж, по меньшей мере, в одном формате (например, используя другой формат для конструктивного чертежа на основании технических характеристик производителя инструментов)). В некоторых вариантах осуществления настоящего изобретения, данные вывода из конструктивной среды, могут использоваться другими компьютерными системами. В некоторых вариантах осуществления настоящего изобретения, конструктивный чертеж, используемый системой 2800, включает данные, относящиеся к конструктивной среде (например, имя конструктивной среды, номер версии конструктивной среды).
[00316] В некоторых вариантах осуществления настоящего изобретения, если пользователь выполняет ручную резку на рабочей поверхности (например, резание на рабочей поверхности, как если бы он использовал обычный (не управляемый автоматически) ручной инструмент, то, по меньшей мере, один процессор в системе 2800 может хранить данные, описывающие ручную резку (например, форму траектории резки, ширину резки, местоположение траектории резки на рабочей поверхности), по меньшей мере, в одном блоке памяти в системе 2800. В некоторых вариантах осуществления настоящего изобретения, если пользователь режет рабочую поверхность на основании конструктивного чертежа, зарегистрированного на рабочей поверхности, то, по меньшей мере, один процессор в системе 2800 может хранить данные, описывающие желаемую траекторию резки (например, имя конструктивного чертежа, желаемую форму траектории, желаемую ширину траектории резания, желаемое местоположение разреза на рабочей поверхности), по меньшей мере, в одном блоке памяти в системе 2800. В некоторых вариантах осуществления настоящего изобретения, если пользователь просверливает ряд отверстий в рабочей поверхности на основании ручных измерений, то, по меньшей мере, один процессор в системе 2800 может хранить данные, описывающие каждое просверленное отверстие (например, размер отверстия, местоположение отверстия на рабочей поверхности), смоделированное пользователем. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может хранить данные, относящиеся к положению системы 2800, по мере того, как система 2800 перемещается пользователем по рабочей поверхности (например, для захвата данных о положении путем отслеживания узора на рабочей поверхности). В некоторых вариантах осуществления настоящего изобретения, один процессор в системе 2800 может хранить данные, относящиеся к положению системы 2800, по мере того, как систему 2800 перемещают по рабочей поверхности для захвата данных для генерации карты. В некоторых вариантах осуществления настоящего изобретения, местоположение компонента системы 2800 (например, датчика, камеры, рабочего элемента, адаптера) отслеживается с использованием камеры и карты (например, с использованием маркеров местоположения на рабочей поверхности, с использованием маркеров местоположения вне рабочей поверхности). В некоторых вариантах осуществления настоящего изобретения, местоположение компонента системы 2800 (например, датчика, камеры, рабочего элемента, адаптера) отслеживается с использованием, по меньшей мере, одного метода позиционирования (например, составления карты местоположения маркеров с использованием, по меньшей мере, одной камеры, дальнометрии (например, с использованием лазеров, с использованием ультразвука)). В некоторых вариантах осуществления настоящего изобретения, система 2800 может использовать данные, хранящиеся, по меньшей мере, в одном блоке памяти для генерирования журнала регистрации на основании данных.
[00317] В некоторых вариантах осуществления настоящего изобретения, конструктивная среда, исполняемая, по меньшей мере, на одном процессоре в системе 2800, может создавать объекты в конструктивной среде с использованием данных, хранящихся, по меньшей мере, в одном блоке памяти в системе 2800. В некоторых вариантах осуществления настоящего изобретения, объекты могут представлять собой конструктивный чертеж. В некоторых вариантах осуществления настоящего изобретения, хранящиеся данные могут включать, по меньшей мере, один элемент в журнале регистрации, включая информацию, ссылки на которую имеются в журнале регистрации. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может создавать объекты в конструктивной среде на основании измеренного контура материала, измеренной формы материала, измеренного шаблона на материале, следа, сгенерированного на основании анализа объекта, или следа, начерченного пользователем. В некоторых вариантах осуществления настоящего изобретения, объекты, созданные в конструктивной среде могут включать информацию о положении рабочей поверхности (например, о положениях, по меньшей мере, одного маркера на рабочей поверхности относительно, по меньшей мере, одной конструкции, описанной в конструктивном чертеже, о положении, по меньшей мере, одной конструкции, описанной в конструктивном чертеже, относительно карты рабочей поверхности). В некоторых вариантах осуществления настоящего изобретения, объекты, созданные в конструктивной среде, могут быть экспортированы в качестве конструктивного чертежа и храниться, по меньшей мере, в одном блоке памяти в системе 2800. В некоторых вариантах осуществления настоящего изобретения, объекты, созданные в конструктивной среде, могут быть экспортированы в формате данных, совместимом с коммерчески доступными программами для проектирования (например, Adobe Illustrator, Autodesk Fusion 360), и храниться, по меньшей мере, в одном блоке памяти в системе 2800. В некоторых вариантах осуществления настоящего изобретения, данные вывода из конструктивной среды (например, конструктивный чертеж, определенные данные программы для проектирования) могут быть переданы в другую компьютерную систему (например, путем передачи конструктивного чертежа на съемное запоминающее устройство, путем передачи конструктивного чертежа посредством интерфейса связи, функционально соединенного, по меньшей мере, с одним процессором в системе 2800). В некоторых вариантах осуществления настоящего изобретения, другая компьютерная система может использовать данные, выводимые из конструктивной среды системы 2800, в конструктивной среде. В некоторых вариантах осуществления настоящего изобретения, другой компьютер может сделать данные, выводимые из конструктивной среды системы 2800, доступными для других компьютерных систем.
[00318] Для облегчения совместной работы, в некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может генерировать данные журнала регистрации, описывающие рабочую поверхность заготовки на основании, по меньшей мере, одного измеренного контура рабочей поверхности, данные, собранные во время составления карты рабочей поверхности, или данные, собранные в результате зондирования рабочей поверхности. В некоторых вариантах осуществления настоящего изобретения, данные, описывающие рабочую поверхность заготовки, могут включать 3D данные, собранные путем зондирования рабочей поверхности с помощью системы 2800. В некоторых вариантах осуществления настоящего изобретения, данные, описывающие рабочую поверхность заготовки, могут включать данные изображения, показывающие участок рабочей поверхности (например, на основании фото-мозаики, созданной из изображений рабочей поверхности).
[00319] В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 или по меньшей мере, один процессор в другой компьютерной системе может использовать данные журнала регистрации (например, описывающие рабочую поверхность заготовки) для генерации модели (например, на основании данных, описывающих рабочую поверхность). В некоторых вариантах осуществления настоящего изобретения, модель может быть сгенерирована в конструктивной среде. В некоторых вариантах осуществления настоящего изобретения, модель может показывать участок рабочей поверхности на основании данных изображения, включенных в журнал регистрации (например, показывающих узор текстуры или сучков в древесине, если рабочая поверхность сделана из древесины, показывающих маркеры на рабочей поверхности (при наличии)). В некоторых вариантах осуществления настоящего изобретения, модель может показывать форму рабочей поверхности на основании измеренного края рабочей поверхности. В некоторых вариантах осуществления настоящего изобретения, модель может показывать рельеф рабочей поверхности на основании данных, собранных в результате зондирования рабочей поверхности. В некоторых вариантах осуществления настоящего изобретения, модель включает данные измерений, относящиеся к рабочей поверхности, на основании карты системы 2800.
[00320] В некоторых вариантах осуществления настоящего изобретения, модель может быть представлена на дисплее, функционально соединенном, по меньшей мере, с одним процессором в системе 2800. В некоторых вариантах осуществления настоящего изобретения, модель может быть представлена на дисплее, функционально соединенном, по меньшей мере, с одним процессором в компьютерной системе, отличной от системы 2800 (например, с настольным компьютером). В некоторых вариантах осуществления настоящего изобретения, пользователь может использовать представление модели для помещения, по меньшей мере, одного конструктивного чертежа в определенных местоположениях на рабочей поверхности. Например, пользователь может выбрать помещение конструктивного чертежа для вырезания участка рабочей поверхности в местоположении, где модель показывает наличие сучка в древесине, составляющей рабочую поверхность. В некоторых вариантах осуществления настоящего изобретения, пользователь может использовать размеры модели, чтобы выбрать, по меньшей мере, один конструктивный чертеж, который максимально увеличивает эффективность использования имеющейся рабочей поверхности. В некоторых вариантах осуществления настоящего изобретения, пользователь может добавить функции или аннотации в модель, которые могут быть записаны в журнал регистрации для использования в системе 2800. В некоторых вариантах осуществления настоящего изобретения, используя модель, пользователь может спроектировать конструкцию в конструктивной среде, используя фактическую информацию о рабочей поверхности. После того, как пользователь закончил работать с моделью (например, выбрал или созданные конструктивные чертежи и их помещение), пользователь может отправить данные обратно в систему 2800 или в другую компьютерную систему. В некоторых вариантах осуществления настоящего изобретения, другой компьютер может отправлять данные в систему 2800. В некоторых вариантах осуществления настоящего изобретения, данные, переданные в систему 2800 из конструктивной среды, могут ссылаться на карту рабочей поверхности при использовании системы 2800. В некоторых вариантах осуществления настоящего изобретения, данные, переданные в систему 2800, могут включать аннотации, конструктивные чертежи или информацию о положении для регистрации конструктивных чертежей на карте. В некоторых вариантах осуществления настоящего изобретения, система 2800 может использовать данные из конструктивной среды для генерации желаемой траектории для рабочего элемента или адаптера. В некоторых вариантах осуществления настоящего изобретения, система 2800 может работать с рабочей поверхностью на основании сгенерированной желаемой траектории.
[00321] В некоторых вариантах осуществления настоящего изобретения, пользователь системы 2800 может работать вместе с пользователем удаленной компьютерной системы таким образом, чтобы система 2800 принимала данные (например, данные, описывающие размещение конструктивных чертежей, описанных выше, конструктивных чертежей или изменений, внесенных в конструктивные чертежи, сделанные пользователем системы удаленной компьютерной системы) из удаленной компьютерной системы. В некоторых вариантах осуществления настоящего изобретения, удаленная компьютерная система может принимать данные (например, конструктивных чертежей или изменений, сделанные в конструктивных чертежах пользователем системы 2800, данные, описывающие работу, выполненную системой 2800 (например, разрезы или измерения, сделанные на рабочей поверхности, данные карты, относящиеся к рабочей поверхности)) из системы 2800. Таким образом, два пользователя могут совместно работать над конструкцией и изготовлением, используя свои соответствующие системы. В некоторых вариантах осуществления настоящего изобретения, компьютерная система и система 2800 могут сообщаться друг с другом, используя интерфейс связи (например, WiFi, Bluetooth, USB). В некоторых вариантах осуществления настоящего изобретения, компьютерная система и система 2800 могут сообщаться посредством, по меньшей мере, одной другой компьютерной системы, которая сообщается с компьютерной системой и системой 2800.
[00322] В некоторых вариантах осуществления настоящего изобретения, пользователь программы в компьютерной системе может делать изменения в конструктивном чертеже, которые записываются в журнал регистрации компьютерной системы или хранятся в компьютерной системе, удаленной от компьютерной системы. Журнал регистрации компьютерной системы отслеживает изменения, сделанные в конструктивном чертеже, в результате чего изменения могут храниться в оригинальном конструктивном чертеже, или изменения могут храниться в новом конструктивном чертеже, основанном на оригинальном конструктивном чертеже (например, в качестве новой версии оригинального конструктивного чертежа). В некоторых вариантах осуществления настоящего изобретения, участок журнала регистрации в компьютерной системе сообщается с системой 2800 непосредственно из компьютерной системы или передается в другую компьютерную систему до его передачи в систему 2800. В некоторых вариантах осуществления настоящего изобретения, система 2800 может загрузить участок журнала регистрации из компьютерной системы из другой компьютерной системы. В некоторых вариантах осуществления настоящего изобретения, система 2800 может обновить локальную копию конструктивного чертежа, основанного на участке журнала регистрации из компьютерной системы. В некоторых вариантах осуществления настоящего изобретения, система 2800 может загрузить обновленный конструктивный чертеж из компьютерной системы, где обновленный конструктивный чертеж включает изменения, внесенные другой компьютерной системой, основанные на участке журнала регистрации из компьютерной системы.
[00323] В некоторых вариантах осуществления настоящего изобретения, приложение синхронизации конструкции на компьютере (например, система 2800) может обработать, по меньшей мере, один участок журнала регистрации из, по меньшей мере, одной компьютерной системы для генерации новых версий конструктивного чертежа на основании данных журнала регистрации. В некоторых вариантах осуществления настоящего изобретения, приложение отслеживания пользователя может обработать, по меньшей мере, один участок журнала регистрации, по меньшей мере, из одной компьютерной системы, чтобы сгенерировать сводную информацию о деятельности пользователя, по меньшей мере, для одного пользователя (например, о деятельности по генерации конструкции, о производительности резания). В некоторых вариантах осуществления настоящего изобретения, приложение отслеживания инструмента может обработать, по меньшей мере, один участок журнала регистрации, по меньшей мере, по одному инструменту для генерации сводной информации, основанной на инструменте (например, для отслеживания использования инструмента, замены рабочего элемента)). В некоторых вариантах осуществления настоящего изобретения, приложение анализа конструктивного исполнения может обработать, по меньшей мере, один участок журнала регистрации, по меньшей мере, по одному инструменту для генерации сводной информации по конструктивному исполнению для работы, выполненной, по меньшей мере, одним инструментом. Например, приложение анализа конструктивного исполнения может позволить пользователю приложения запрашивать подробные данные (например, используемый тип наконечника, используемый размер наконечника) для проекта, выполненного данным инструментом. В другом примере, приложение анализа конструктивного исполнения может позволить пользователю приложения сравнить подробные данные фактического исполнения (например, разрез по траектории) с подробными данными в соответствии с задуманной конструкцией (например, размеры в цифровой конструкции) для завершения проекта с помощью данного инструмента. В некоторых вариантах осуществления настоящего изобретения, приложение может объединять, по меньшей мере, одну функциональность приложений, описанных выше. Любое из вышеуказанных приложений может быть автономным приложением, которое исполняется в компьютерной системе (например, в системе 2800), или оно может исполняться в другом приложении (например, в программе для проектирования) в компьютерной системе (например, в системе 2800).
[00324] В некоторых вариантах осуществления настоящего изобретения, компьютерная система может принимать информацию о деятельности системы (например, участок журнала регистрации каждой компьютерной системы или участок данных, на которые имеется ссылка в журнале регистрации в компьютерной системе), по меньшей мере, от одного инструмента. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один инструмент может передавать информацию о деятельности своей компьютерной системы, используя интерфейс связи (например, адаптер связи 802.11, адаптер сотовой связи, адаптер связи Bluetooth). В некоторых вариантах осуществления настоящего изобретения, компьютерная система может поддерживать список задач для завершения, по меньшей мере, одним инструментом. В некоторых вариантах осуществления настоящего изобретения, компьютерная система может отслеживать состояние завершения, по меньшей мере, одной задачи на основании принятой информации о деятельности системы от каждого инструмента. В некоторых вариантах осуществления настоящего изобретения, компьютерная система может отслеживать использование каждого инструмента для планирования технического обеспечения и обслуживания. В некоторых вариантах осуществления настоящего изобретения, компьютерная система может отслеживать производительность пользователя на основании информации о деятельности системы от данного пользовательского инструмента. Например, используя компьютерную систему, диспетчер может просматривать: состояние завершения задач на рабочем месте, потребности в техническом обеспечении и обслуживании инструментов, присутствующих на рабочем месте, производительность отдельных работников на рабочем месте (на основании использования их инструментов).
[00325] На Фигуре 29 показан примерный журнал регистрации инструментов 2910 из системы ToolUnit123. Запись 2911 в журнал регистрации инструментов 2910 содержит идентификатор журнала регистрации, отметку о времени и информацию о текущем пользователе инструмента, информацию о конструктивном чертеже, указывающую, что конструктивный чертеж «ElectricalBox-revision2.svg» («Электрический блок-версия2.svg») был получен от системы ServerUnitDEF (синхронизация), информацию о подключении инструмента к Интернету и приблизительное местоположение инструмента на основании IP-адреса. Запись 2912 в журнал регистрации инструментов 2910 содержит идентификатор журнала регистрации, отметку о времени и описывает составление карты рабочей поверхности и связанную информацию. Запись 2913 в журнал регистрации инструментов 2910 содержит идентификатор журнала регистрации, отметку о времени и описывает отношение конструктивного чертежа «ElectricalBox-revision2.svg» к карте как Instance1 (Экземпляр1) и связанную информацию. Запись 2914 в журнал регистрации инструментов 2910 содержит идентификатор журнала регистрации, отметку о времени и описывает изменение, сделанное в Edge3 (Край3) в конструктивном чертеже «ElectricalBox-revision2.svg» в Instance1, и связанную информацию. Запись 2915 в журнал регистрации инструментов 2910 содержит идентификатор журнала регистрации, отметку о времени и описывает выбор радиуса наконечника и генерацию желаемой траектории для рабочего элемента. Запись 2916 в журнал регистрации инструментов 2910 содержит идентификатор журнала регистрации, отметку о времени и описывает резание желаемой траектории, относящейся к Edge3 в Instance1, и связанную информацию. Запись 2916 описывает точность резки на основании измеренной точности направления рабочего элемента по желаемой траектории. Точность относится к сравнению измеренного положения рабочего элемента (например, на основании карты и данных изображения с маркерами местоположения на рабочей поверхности) и желаемой траектории. Запись 2917 в журнал регистрации инструментов 2910 содержит идентификатор журнала регистрации, отметку о времени и описывает выход пользователя из системы и передачу журнала регистрации инструментов 2910 в компьютерную систему ServerUnit789 (синхронизация). В некоторых вариантах осуществления настоящего изобретения, желаемая траектория может обозначать перемещение адаптера, удерживающего рабочий элемент. В некоторых вариантах осуществления настоящего изобретения, желаемая траектория может указывать положение, по меньшей мере, одного датчика, собирающего данные для установления положения, используя карту. В некоторых вариантах осуществления настоящего изобретения, изменения, внесенные в Edge3 в Instance1, могут быть пропущены. В некоторых вариантах осуществления настоящего изобретения, система ToolUnit123 может передавать журнал регистрации инструментов 2910 в систему ServerUnitDEF (синхронизация).
[00326] На Фигуре 29 показан примерный журнал регистрации в компьютере 2920 из системы ComputerUnit456. В этом примере, журнал регистрации в компьютере 2920 показывает деятельность, относящуюся к сессии CAD (CADSessionABC). Запись 2911 в журнале регистрации в компьютере 2920 содержит идентификатор журнала регистрации, отметку о времени и информацию, относящуюся к текущему пользователю, информацию о подключении компьютерной системы к Интернету и приблизительное местоположение компьютерной системы на основании IP-адреса. Запись 2922 в журнале регистрации в компьютере 2920 содержит идентификатор журнала регистрации, отметку о времени и описывает создание конструктивного чертежа «ElectricalBox.svg» («Электрический блок-svg»). Запись 2923 в журнале регистрации в компьютере 2920 содержит идентификатор журнала регистрации, отметку о времени и описывает новую версию конструктивного чертежа «ElectricalBox.svg» для создания конструктивного чертежа «ElectricalBox-revision2.svg». Запись 2924 в журнале регистрации в компьютере 2920 содержит идентификатор журнала регистрации, отметку о времени и описывает новую версию конструктивного чертежа «ElectricalBox-revision2.svg» для создания конструктивного чертежа «ElectricalBox-revision3.svg» («Электрический блок-версия3-svg»). Запись 2925 в журнале регистрации в компьютере 2920 содержит идентификатор журнала регистрации, отметку о времени и описывает синхронизацию данных между ComputerUnit456 и ServerUnit789. В некоторых вариантах осуществления настоящего изобретения, как показано в записи 2925 на Фигуре 29, синхронизация инициируется пользователем. В некоторых вариантах осуществления настоящего изобретения, синхронизация данных может возникнуть без какого-либо ввода данных пользователем. В некоторых вариантах осуществления настоящего изобретения, синхронизация данных может автоматически обновлять данные в синхронизируемых компьютерных системах. В некоторых вариантах осуществления настоящего изобретения, как показано в этом примере, пользователю может быть предложено принять изменения на основании обновленных данных. Запись 2925 описывает создание конструктивного чертежа «ElectricalBox-revision2-revisionA.svg» («Электрический блок-версия2-версияА.svg») на основании применения изменений «ElectricalBox-revision2.svg» Instance1-Edge3 (см. запись 2916 в журнале регистрации инструментов 2910) из системы ToolUnit123, сделанных в конструкции «ElectricalBox-revision2.svg» (см. запись 2923 в журнале регистрации в компьютере 2920), созданных в ComputerUnit456. Запись 2925 также описывает создание конструкции «ElectricalBox-revision3-revisionA.svg» на основании применения изменений «ElectricalBox-revision2.svg» Instance1-Edge3 (см. запись 2916 в журнале регистрации инструментов 2910) из системы ToolUnit123, сделанных в обновленной конструкции «ElectricalBox-revision3.svg» (см. запись 2924 в журнале регистрации в компьютере 2920), созданных в ComputerUnit456. Запись 2926 в журнале регистрации в компьютере 2920 содержит идентификатор журнала регистрации, отметку о времени и описывает выход пользователя из CADSessionABC в ComputerUnit456.
[00327] Структура журнала регистрации инструментов 2910 и журнала регистрации в компьютере 2920, показанная на Фигуре 29, является примерной. В некоторых вариантах осуществления настоящего изобретения, первая компьютерная система (например, ComputerUnit456) может извлекать участки журнала регистрации непосредственно из второй компьютерной системы (например, из системы ToolUnit123) или наоборот. В некоторых вариантах осуществления настоящего изобретения, приложение для синхронизации данных может выполняться посредством инструмента (например, система ToolUnit123), используя журнал регистрации, извлеченный инструментом из компьютерной системы (например, из системы ComputerUnit456). В некоторых вариантах осуществления настоящего изобретения, компьютерная система (например, система ServerUnit789) может принимать первый журнал регистрации (например, журнал регистрации в компьютере 2920) из первой компьютерной системы (например, из системы ComputerUnit456), принимать второй журнал регистрации (например, журнал регистрации инструментов 2910) из второй компьютерной системы (например, из системы ToolUnit123) и запускать приложение для синхронизации данных, основанных на информации, содержащейся в первом и втором журналах регистрации.
[00328] В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, одна компьютерная система может передавать данные (например, конструктивные чертежи) друг другу, используя пиринговую систему или систему, активированную сервером. Например, на Фигуре 29 конструктивный чертеж «ElectricalBox-revision2.svg», созданный в записи 2923 в журнале регистрации в компьютере 2920, может быть синхронизирован из системы ComputerUnit456 с компьютерной системой (ServerUnit789), и система ToolUnit123 может извлекать «ElectricalBox-revision2.svg» из компьютерной системы (ServerUnit789), как показано в записи 2911 журнала регистрации инструментов 2910. В другом примере «ElectricalBox-revision2.svg», созданный в записи 2923 в журнале регистрации в компьютере 2920, может быть синхронизирован из системы ComputerUnit456 с системой ToolUnit123 (например, как показано в записи 2911 журнала регистрации инструментов 2910). В некоторых вариантах осуществления настоящего изобретения, хотя это не показано в журнале регистрации в компьютере 2920 на Фигуре 29, синхронизация конструктивных чертежей может храниться в журнале регистрации с помощью компьютерной системы (например, системы ComputerUnit456).
[00329] В некоторых вариантах осуществления настоящего изобретения, система 2800 может оценивать информацию, команды или входные данные, относящиеся к положению, по меньшей мере, одного компонента, используя, по меньшей мере, одно правило запуска для запуска, по меньшей мере, одного действия. В некоторых вариантах осуществления настоящего изобретения, положение компонента может быть установлено путем составления карты рабочей поверхности с использованием, по меньшей мере, одного датчика и установления положения компонента на основании данных, по меньшей мере, от одного датчика и карты. В некоторых вариантах осуществления настоящего изобретения, система 2800 может оценивать информацию, команды или входные данные, относящиеся к пользователю (например, положение пользователя относительно инструмента, контакт пользователя с инструментом), используя, по меньшей мере, одно правило запуска для запуска, по меньшей мере, одного действия.
[00330] В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе 2800 может проанализировать, по меньшей мере, одно из следующего: (1) информацию о местоположении, по меньшей мере, одного компонента (например, местоположение режущего наконечника, местоположение датчика (например, камеры)), (2) вводные данные, по меньшей мере, от одного датчика (например, вводные данные от датчика сила зажима на ручке-держателе системы, вводные данные от микрофона (например, на основании команд или звуков от пользователя системы или других лиц, находящихся поблизости от системы), вводные данные от датчика силы, находящегося в основании системы, вводные данные от ИИБ в системе, вводные данные от датчика состава рабочей поверхности (например, предотвращение резания стекловолокнистых материалов), вводные данные от переключателя, запущенного в результате удаления защитного барьера и пылезащитного кожуха 2806), (3) вводные данные от пользователя (например, взаимодействие пользователя с сенсорным экраном пользовательского интерфейса), (4) команду от удаленной компьютерной системы (например, отключение системы, запущенное диспетчером, использующим компьютерную систему, удаленную от системы 2800), (5) информацию о местоположении системы (например, положение системы относительно края заготовки, географическое местоположение системы (например, местоположение рабочего места), местоположение системы в структуре (например, газовый водонагреватель)), (6) информацию о местоположении пользователя или части тела пользователя (например, лица, руки, глаз) относительно, по меньшей мере, одного компонента (например, рабочего элемента) системы или относительно самой системы (например, использование стереоскопической камеры, времяпролетной камеры, ультразвуковых датчиков, емкостных датчиков, датчиков обнаружения по прерыванию луча, ЛИДАР) или (7) информацию о пользователе (например, определение, надеты ли на пользователе защитные очки) для запуска, по меньшей мере, одного действия. В некоторых вариантах осуществления настоящего изобретения, любая комбинация из вышеперечисленной информации, команд или вводных данных может быть проанализирована при оценке, по меньшей мере, одного правила запуска, по меньшей мере, одним процессором в системе. В некоторых вариантах осуществления настоящего изобретения, на основании оценки, по меньшей мере, одного процессора в системе запускается, по меньшей мере, одно действие.
[00331] В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе может оценивать правило на основании изменений в относительном положении между, по меньшей мере, одним датчиком и рабочей поверхностью. Например, по меньшей мере, один процессор в системе может запускать, по меньшей мере одно действие, если, по меньшей мере, один процессор определяет, что высота камеры относительно рабочей поверхности указывает на то, что основание системы наклонено относительно рабочей поверхности или больше не соприкасается с ней. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе может оценивать правило на основании положения системы (например, установленного на основании положения камеры относительно карты) относительно области, отсканированной для генерации карты. Например, по меньшей мере, один процессор в системе может запускать, по меньшей мере, одно действие, если систему перемещают за пределы области сканирования. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе может оценивать правило на основании датчика, указывающего на тот факт, что, по меньшей мере, один участок основания системы наклонен относительно рабочей поверхности или больше не соприкасается с ней. Например, по меньшей мере, один процессор в системе может запускать, по меньшей мере, одно действие, если датчик измеряет превышение наклона системы (например, угол в 1 градус, 2 градуса, 5 градусов, 10 градусов, 15 градусов или 25 градусов). В другом примере, по меньшей мере, один процессор в системе может запускать, по меньшей мере, одно действие, если датчик силы определяет изменение или разницу (например, на 0,5%, 1%, 2%, 3% или абсолютное изменение, например, 1 ньютон, 0,5 ньютона, 0,25 ньютона, 0,1 ньютона, 0,05 ньютона или 2 ньютона) между измерениями.
[00332] В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе может оценивать правило на основания определения того факта, что сигнал, по меньшей мере, от одного датчика силы зажима указывает, что пользователь не контактирует с датчиком силы зажима (например, на ручке-держателе). Например, по меньшей мере, один процессор в системе может запускать, по меньшей мере, одно действие, если пользователь не контактирует с датчиком силы зажима, если это нужно. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе может оценивать правило на основании звуковых команд или звуков, определенных микрофоном. Например, по меньшей мере, один процессор в системе может запускать, по меньшей мере, одно действие, если система определяет данные, относящиеся, по меньшей мере, к одному слову/фразе (например, «стоп») или к звуку (например, крик), во время обработки сигнала (например, распознавание речи), принятого от микрофона в системе. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе может оценивать правило на основании рабочего действия рабочего элемента, определенного микрофоном в системе. Например, по меньшей мере, один процессор в системе может запускать, по меньшей мере, одно действие, если, по меньшей мере, один процессор в системе определит изменение звука рабочего действия рабочего элемента (например, изменение звука резания, издаваемого системой, если рабочий элемент сломан) путем обработки сигнала, принятого от микрофона в системе.
[00333] В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе может оценивать правило на основании положения пользователя относительно системы. Например, по меньшей мере, один процессор в системе может запускать, по меньшей мере, одно действие, если, по меньшей мере, один процессор в системе определяет данные, принятые, по меньшей мере, от одного датчика, указывающее, что пользователь не правильно расположен относительно системы (например, удерживает ручки-держатели 2808 и 2810 из системы 2800 со стороны камеры 2816 вместо удерживания ручек-держателей 2808 и 2808 из системы 2800 со стороны шпинделя 2818). В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе может оценивать правило на основании определения повреждения или поломки рабочего элемента. Например, по меньшей мере, один процессор в системе может запускать, по меньшей мере, одно действие, если, по меньшей мере, один процессор в системе определит, что рабочий элемент поврежден или сломан (например, используя датчик обнаружения по прерыванию луча). В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе может оценивать правило на основании мониторинга функции сторожевого реле. Например, по меньшей мере, один процессор в системе может запускать, по меньшей мере, одно действие, если, по меньшей мере, один процессор в системе определит, что: (1) данные от внутреннего датчика или процессора не поступают вовремя или (2) данные от внутреннего датчика или процессора искажены (например, указывая на неисправность).
[00334] В некоторых вариантах осуществления настоящего изобретения, как обсуждалось выше, по меньшей мере, один процессор в системе может оценивать правило на основании позиционной взаимосвязи между желаемой траекторией и диапазоном регулировки системы. Например, по меньшей мере, один процессор в системе может запускать, по меньшей мере, одно действие, если, по меньшей мере, один процессор определит, что рабочий элемент не может достичь, по меньшей мере, одной точки на желаемой траектории из-за местоположения системы и размера диапазона регулировки системы. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один процессор в системе может оценивать правило на основании определения, по меньшей мере, одним процессором, что положение рабочего элемента приближается к краю диапазона регулировки системы. Например, по меньшей мере, один процессор в системе может контролировать положение, по меньшей мере одного рабочего элемента, его скорость, ускорение или связанные с ними параметры (например, производную ускорения) относительно края диапазона регулировки системы для прогнозирования перемещения рабочего элемента. По меньшей мере, один процессор в системе может запускать, по меньшей мере, одно действие, если прогнозируемое перемещение рабочего элемента предполагает, что рабочий элемент достигнет края диапазона регулировки за время, необходимое для втягивания рабочего элемента с рабочей поверхности.
[00335] В некоторых вариантах осуществления настоящего изобретения, как обсуждалось выше, по меньшей мере, один процессор в системе может оценивать правило на основании позиционной взаимосвязи между желаемой траекторией и диапазоном регулировки системы. Например, по меньшей мере, один процессор в системе может запускать, по меньшей мере, одно действие, если, по меньшей мере, один процессор определит, что желаемая траектория перекрывается только с предварительно заданным участком диапазона регулировки системы (например, в пределах данной области диапазона регулировки системы от внешнего края диапазона регулировки системы) из-за местоположения системы. В этом примере, если диапазон регулировки системы представляет собой круг, то предварительно заданным участком может быть кольцевая область, исключая участок (например, 50%, 60%, 70%, 80% или 90%) области диапазона регулировки системы в центре. В этом примере, по меньшей мере, один процессор в системе может запускать втягивание рабочего элемента с рабочей поверхности (например, в тело системы), если желаемая траектория только перекрывает предварительно заданный участок. В указанных выше конфигурациях, смещение системы пользователем, который перемещает желаемую траекторию за пределы диапазона регулировки, может вызвать непреднамеренный разрез на рабочей поверхности.
[00336] В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, одно запущенное действие относится к установке системы в безопасное состояние (например, втягивание рабочего элемента с рабочей поверхности (например, в корпус системы), к остановке вращения режущего наконечника). В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, одно запущенное действие относятся к предупреждению пользователя, использующего систему (например, к предупреждению пользователя о том, что рабочий элемент в системе сломан). В некоторых вариантах осуществления настоящего изобретения, запущенное действие может быть выбрано, по меньшей мере, из одного из следующих: втягивание рабочего элемента с рабочей поверхности, остановка перемещения рабочего элемента (например, подачи электропитания для резания на двигатель привода шпинделя 2902, вращающего режущий наконечник), замедление перемещения рабочего элемента (например, уменьшение скорости вращения режущего наконечника), подача звукового сигнала тревоги (например, используя динамик, подключенный, по меньшей мере, к одному процессору в системе), сохранение уведомления о тревоге (например, хранение уведомления о тревоге в журнале регистрации в блоке памяти, расположенном в системе, хранение уведомления о тревоге в компьютерной системе, удаленной от системы) или запуск визуального индикатора (например, мигающего света в системе).
[00337] Хотя различные действия описаны в настоящем документе в соответствии с примерным способом настоящего изобретения, следует понимать, что некоторые действия, описанные в настоящем документе, могут быть пропущены, а другие могут быть добавлены, не выходя за рамки объема настоящего изобретения.
[00338] Специалистам в данной области техники будет понятно, что в вышеописанных вариантах осуществления настоящего изобретения могут быть сделаны изменения или модификации без отступления от общих концепций настоящего изобретения. Элементы или признаки, по меньшей мере, одного варианта осуществления настоящего изобретения, могут быть объединены с элементами или признаками других вариантов осуществления настоящего изобретения, не выходя за рамки объема настоящего изобретения. Следовательно, подразумевается, что настоящее изобретение не ограничено описанными конкретными вариантами его осуществления, а предназначено для охвата всех модификаций и изменений в пределах объема и сущности настоящего изобретения.
[00339] Системы, описанные в настоящем документе, могут предоставлять несколько систем любого или каждого из этих компонентов, и эти компоненты могут быть предоставлены либо в автономной машине, либо, в некоторых вариантах осуществления настоящего изобретения, в нескольких машинах в распределенной системе. Системы и способы, описанные в настоящем документе, могут быть реализованы в качестве способа, устройства или изделия промышленного производства с использованием методов программирования или разработки для создания программного обеспечения, аппаратно-программного обеспечения, аппаратного обеспечения или любой их комбинации. Кроме того, системы и способы, описанные в настоящем документе, могут быть предоставлены в виде, по меньшей мере, одной машиночитаемой программы, осуществленной, по меньшей мере, в одном изделии промышленного производства. Термин «изделие промышленного производства», в том смысле, в котором он используется в настоящем документе, предназначен для охвата кода или логической части, которая доступна и встроена, по меньшей мере, в одно машиночитаемое устройство, аппаратно-программное обеспечение, программируемую логическую часть, запоминающее устройство (например, EEPROM, ROM, FROM, RAM, SRAM), аппаратное обеспечение (например, чип с интегральными схемами, программируемая пользователем вентильная матрица (FPGA), специализированная интегральная схема (ASIC)), электронное устройство, блок машиночитаемого энергонезависимого запоминающего устройства (например, CD-ROM (компакт-диск, доступный только для чтения), гибкий диск, накопитель на жестком диске). Изделие промышленного производства может быть доступно с файлового сервера, который предоставляет доступ к машиночитаемым программам посредством линии передачи по сети, беспроводного носителя передачи данных, сигналов, распространяющихся в пространстве, радиоволн или инфракрасных сигналов. Изделие промышленного производства может представлять собой карту флэш-памяти или магнитную ленту. Изделие промышленного производства включает логическую часть аппаратного обеспечения, а также код программного обеспечения или программируемый код, встроенный в машиночитаемый носитель, который исполняется процессором. Как правило, машиночитаемые программы могут быть реализованы с помощью любого языка программирования, например, LISP, PERL, С, С++, С#, PROLOG или любого языка байт-кода, например, JAVA. Программы, реализованные программно, могут храниться, по меньшей мере, в одном изделии промышленного производства или в виде объектного кода.
[00340] Описав определенные варианты осуществления по настоящему изобретению способов и систем для виртуализации звукового аппаратного обеспечения, по меньшей мере, для одной виртуальной машины, специалисту в данной области техники станет очевидно, что могут использоваться и другие варианты осуществления настоящего изобретения, включающие концепции настоящего изобретения.
[00341] Не смотря на то, что в настоящем документе были описаны и продемонстрированы различные варианты осуществления настоящего изобретения, специалисты в данной области техники смогут легко представить различные другие средства или структуры для выполнения функции или получения результатов или, по меньшей мере, одного преимущества, описанного в настоящем документе, и каждое из таких вариантов или модификаций будет считаться находящимся в пределах объема вариантов осуществления настоящего изобретения, описанных в настоящем документе. В более общем смысле, специалисты в данной области техники легко поймут, что все параметры, размеры, материалы и конфигурации, описанные в настоящем документе, предназначены для примера, и что фактические параметры, размеры, материалы или конфигурации будут зависеть от конкретного применения или применений, для которых используются эти методы. Специалисты в данной области техники выявят или смогут установить, используя самые обычные эксперименты, эквиваленты конкретных вариантов осуществления настоящего изобретения, описанных в настоящем документе. Следовательно, следует понимать, что вышеизложенные варианты осуществления настоящего изобретения представлены только в качестве примера, и что в пределах объема прилагаемой формулы изобретения и ее эквивалентов, варианты осуществления настоящего изобретения могут применяться на практике иным образом, чем это заявлено и показано в конкретном описании. Варианты осуществления настоящего изобретения относятся к каждому отдельному признаку, системе, изделию промышленного производства, материалу, набору или способу, которые описаны в настоящем документе. Кроме того, любая комбинация, по меньшей мере, двух таких признаков, систем, изделий промышленного производства, материалов, наборов или способов, если такие признаки, системы, изделия промышленного производства, материалы, наборы или способы не являются взаимно несовместимыми, включена в объем настоящего изобретения.
[00342] Вышеописанные варианты осуществления настоящего изобретения могут быть реализованы любым из многочисленных способов. Например, варианты осуществления настоящего изобретения могут быть реализованы с использованием аппаратного обеспечения, программного обеспечения или их комбинации. При реализации в программном обеспечении, код программного обеспечения может быть исполнен на любом подходящем процессоре или совокупности процессоров, независимо от того, предоставлены ли они в единственной компьютерной системе или распределены по нескольким компьютерным системам.
[00343] Кроме того, компьютер может иметь, по меньшей мере, одно устройств ввода и вывода данных. Эти устройства могут использоваться, помимо прочего, для представления пользовательского интерфейса. Примеры устройств вывода данных, которые могут использоваться для предоставления пользовательского интерфейса, включают принтеры или экраны дисплея для визуального представления вывода данных, и динамики или другие устройства генерации звука для звукового представления вывода данных. Примеры устройств ввода данных, которые можно использовать для пользовательского интерфейса, включают клавиатуры и указательные устройства, например, мыши, панели с сенсорным управлением и цифровые планшеты. В качестве другого примера, компьютер может принимать входную информацию посредством распознавания речи или в другом аудиоформате.
[00344] Такие компьютеры могут быть взаимосвязаны посредством, по меньшей мере, одной сети в любом подходящем форме, включая локальную сеть или глобальную сеть, например, сеть предприятия и интеллектуальную сеть (ИС) или Интернет. Такие сети могут основываться на любой подходящей технологии и могут работать в соответствии с любым подходящим протоколом, и они могут включать беспроводные сети, проводные сети или оптоволоконные сети.
[00345] Компьютер, используемый для реализации, по меньшей мере, участка функциональности, описанного в настоящем документе, может содержать, по меньшей мере, один блок памяти, по меньшей мере, один блок обработки (также называемый в настоящем документе просто «процессором»), по меньшей мере, один интерфейс связи, по меньшей мере, один блок отображения, и, по меньшей мере, одно пользовательское устройство ввода данных. Блок памяти может содержать любой машиночитаемый носитель данных и может хранить команды компьютера (также называемые в настоящем документе «команды, исполняемые процессором») для реализации различных функциональностей, описанных в настоящем документе. Блок(и) обработки может использоваться для исполнения команд. Интерфейс(ы) связи может быть соединен с проводной или беспроводной сетью, каналом передачи информации или с другими средствами связи и, следовательно, он может позволять компьютеру передавать сообщения или принимать сообщения от других устройств. Блок(и) отображения может быть предоставлен, например, для того, чтобы позволить пользователю просматривать различную информацию в связи с исполнением команд. Пользовательское устройство(устройства) ввода данных может быть предоставлен для того, чтобы, например, пользователь мог выполнять регулировки вручную, делать выборки, вводить данные или различную другую информацию или взаимодействовать с процессором любым из множества способов во время выполнения команд.
[00346] Различные способы или процессы, описанные в настоящем документе, могут быть закодированы как программное обеспечение, которое исполняется, по меньшей мере, на одном процессоре, который использует любую из множества операционных систем или платформ. Кроме того, такое программное обеспечение может быть написано с использованием любого из многих подходящих языков программирования или инструментов программирования, или инструментов написания сценариев, а также оно может быть скомпилировано как исполняемый код машинного языка или промежуточный код, который исполняется в интегрированной среде или на виртуальной машине.
[00347] Описанная в настоящем документе концепция может быть осуществлена как машиночитаемый носитель данных (или несколько машиночитаемых носителей данных) (например, машинная память, по меньшей мере, один гибкий диск, компакт-диск, оптический диск, магнитная лента, флэш-память, конфигурация схемы в программируемой пользователем вентильной матрице или другое полупроводниковое устройство, или другой энергонезависимый носитель данных или материальный носитель данных для компьютеров), закодированный, по меньшей мере, одной программой, которая, при исполнении, по меньшей мере, на одном компьютере или другом процессоре, выполняет способы, реализующие различные варианты осуществления настоящего изобретения, описанные в настоящем документе. Машиночитаемый носитель данных или носитель данных может быть переносимым, в результате чего, хранящаяся на нем программа или программы могут быть загружены, по меньшей мере, на один другой компьютер или на другой процессор для реализации различных аспектов и вариантов осуществления настоящего изобретения, описанных в настоящем документе.
[00348] Термин «рабочий элемент», в том смысле, в котором он используется в настоящем документе, может относиться к наконечнику, наконечнику для выпиливания, циркулярной дисковой пилке, режущему наконечнику, режущему элементу, режущему острию, острию режущего инструмента, буровому наконечнику, дисковой пилке (например, для лобзика, ножовочной пилы, прорезной пилы), зонду, наконечнику маршрутизатора, острию инструмента, v-образному режущему наконечнику или другому компоненту, аналогичному используемому в обычном ручном инструменте. Термин «рабочий элемент», в том смысле, в котором он используется в настоящем документе, может относиться к наконечнику для пипетки, вакуумной насадке автомата для транспортировки и установки инструмента, ножу для резки винила, инструменту для письма (например, к карандашу, ручке, ручке для черчения) или к аналогичной вещи.
[00349] Термин «рабочая поверхность» или «поверхность для работы», в том смысле, в котором он используется в настоящем документе, может относиться к поверхности, на которой рабочий элемент может выполнять действие (например, резать, чертить, зондировать, контактировать). В некоторых вариантах осуществления настоящего изобретения, материал, на который воздействует рабочий элемент, включает рабочую поверхность, имеющую определенную толщину (например, кусок многослойной фанеры размером 4 дюйма × 8 дюймов с толщиной

[00350] Термин «актуатор», в том смысле, в котором он используется в настоящем документе, может относиться к серводвигателю, работающему от постоянного тока, двигателю, работающему от переменного тока, шаговому двигателю, соленоиду или любому механизму регулировки положения или ориентации, использующему, по меньшей мере, один гидравлический, пневматический, электрический, магнитный, тепловой или механический привод.
[00351] Термин «камера», в том смысле, в котором он используется в настоящем документе, может относиться к системе захвата изображения, включая обычные цифровых камеры (используя датчик изображения и, по меньшей мере, один объектив), светопольные камеры, массивы изображений (например, плоский массив Фурье-захвата) или аналогичные системы.
[00352] Термин «датчик», в том смысле, в котором он используется в настоящем документе, может относиться к камере, ультразвуковому датчику, фотодатчику (например, лазерный датчик, инфракрасный датчик), времяпролетному датчику, инерционному датчику, фазовому датчику, оптическому датчику, гибридному датчику (комбинация, по меньшей мере, одного датчика) или любому аналогичному датчику (например, датчик позиционирования, ультразвуковой датчик определения дальности, лазерный датчик определения дальности).
[00353] Термины «программа» или «программное обеспечение» используются в настоящем документе в общем смысле для обозначения любого типа компьютерного кода или набора команд, исполняемых компьютером, которые можно использовать для программирования компьютера или другого процессора для реализации различных аспектов вариантов осуществления настоящего изобретения, как обсуждалось выше. Кроме того, в соответствии с одним аспектом, по меньшей мере, одна компьютерная программа, которая при исполнении выполняет способы или операции, описанные в настоящем документе, не обязательно должна находиться на одном компьютере или процессоре, она может быть распределена по модульному принципу среди множества различных компьютеров или процессоров для реализации различных аспектов или вариантов осуществления настоящего изобретения, описанных в настоящем документе.
[00354] Команды, исполняемые компьютером, могут иметь различные формы, например, программные модули, исполняемые, по меньшей мере, одним компьютером или другим устройством. Как правило, программные модули включают рутинные операции, программы, объекты, компоненты или структуры данных, которые выполняют конкретные задачи или реализуют конкретные абстрактные типы данных. Как правило, функциональность программных модулей может быть объединена или распределена по желанию в различных вариантах осуществления настоящего изобретения.
[00355] Структуры данных могут храниться на машиночитаемом носителе данных в любой подходящей форме. Для простоты объяснения, можно показать, что структуры данных имеют поля, которые связаны посредством местоположения в структуре данных. Подобные взаимосвязи также могут быть достигнуты путем выделения места хранения для полей с местоположениями на машиночитаемом носителе данных, который передает взаимосвязь между полями. Любой подходящий механизм может использоваться для установления взаимосвязи между информацией в полях структуры данных, в том числе посредством использования указателей, тегов или других механизмов, которые устанавливают взаимосвязь между элементами данных.
[00356] Концепции, описанные в настоящем документе, могут быть осуществлены в качестве, по меньшей мере, одного способа, пример которого предоставлен. Если не указано иное, этапы, выполняемые в качестве части способа, могут быть упорядочены любым подходящим способом. Соответственно, могут быть созданы варианты осуществления настоящего изобретения, в которых этапы выполняются в порядке, отличном от продемонстрированных, что может включать выполнение некоторых этапов одновременно, даже если они показаны как последовательные этапы в иллюстративных вариантах осуществления настоящего изобретения.
[00357] Используемые в настоящем документе термины «свет», «оптический» и связанные с ними термины не должны истолковываться иначе, кроме как относящиеся исключительно к электромагнитному излучению в видимой области спектра, а не как обычно относящиеся к электромагнитному излучению в ультрафиолетовой области спектра (примерно от 10 нм до 390 нм), видимой области спектра (от 390 до 750 нм), ближней инфракрасной области спектра (от 750 до 1400 нм), средней инфракрасной области спектра (от 1400 до 15000 нм) и дальней инфракрасной области спектра (от 15000 до 1 мм).
[00358] Неопределенные артикли «а» и «an», используемые в настоящем документе в описании и в формуле изобретения, если явно не указано иное, следует понимать как означающие «по меньшей мере, один».
[00359] Ссылки на «или» могут быть истолкованы как включающие, поэтому любые термины, описанные с использованием «или», могут указывать на любой один, более чем один и все описанные термины.
[00360] В формуле изобретения, а также в приведенном выше описании все переходные фразы, такие как «содержащий», «включающий», «несущий», «имеющий», «составляющий», «заключающий», «заключающий в себе», «составленный из», и тому подобное следует понимать, как ничем не ограниченные, то есть, это означает, что они включают эти значения, но ими не ограничиваются.
Реферат
Изобретение относится к области обработки рабочей поверхности и может быть использовано для позиционирования на рабочей поверхности установки с приводом перемещения и с рабочим элементом. Система содержит процессор, блок памяти и датчики для позиционирования рабочего элемента на рабочей поверхности. Система обеспечивает отслеживание работы рабочего элемента на рабочей поверхности и изготовление заданной конструкции в результате совместной работы с другими компьютерными системами. Изобретение касается также компьютеризованного способа позиционирования установки с рабочим элементом и машиночитаемого носителя, содержащего команды для процессора, обеспечивающие осуществление способа. Использование изобретений позволяет повысить качество и точность обработки рабочей поверхности. 3 н. и 12 з.п. ф-лы, 46 ил., 1 табл.
Комментарии