Способ выполнения хирургической процедуры - RU2408302C2
Код документа: RU2408302C2
Чертежи























Описание
Настоящая заявка связана со следующими совместно рассматриваемыми заявками на патент: заявка № 60/507,800; заявка № 60/507,799; и заявка № 60/507,798; которые включены в настоящее описание путем данной ссылки.
Уровень техники изобретения
Настоящее изобретение относится, в общем, к устройствам и способам для хирургического видоизменения органов и сосудов. В частности, настоящее изобретение относится к приспособлениям для наложения анастомоза с целью соединения двух органов, например двух отдельных участков тонкой кишки между собой, секции тонкой кишки с желудком или общего желчного протока с двенадцатиперстной кишкой в ходе процедуры, называемой холедоходуоденостомией.
Наложение анастомоза или хирургическое формирование прохода между двумя обычно отдельными сосудами представляет собой ответственный этап многих хирургических процедур. Данное утверждение особенно справедливо для процедур желудочного шунтирования, в которых два участка тонкой кишки соединяют между собой, и другой участок тонкой кишки соединяют с желудком пациента. Утверждение верно также в отношении хирургического лечения нарушений проходимости в общем желчном протоке дренированием желчи из протока в тонкую кишку при оперативном лечении рака поджелудочной железы.
Во многих случаях наложения анастомоза хирурги применяют циркулярные степлеры, линейные степлеры или ручное наложение швов. Однако для уменьшения размеров разреза и для ослабления технических требований к хирургическому процессу и сокращения времени его выполнения предложено расширяемое медицинское устройство, которое деформируется для скрепления участков ткани, когда устройство выталкивается из сжимающего корпуса. Заявка 2003/0120292 на патент США автора Adrian Park с соавторами, которая включена настоящим в данное описание путем ссылки, содержит описание упомянутого устройства.
Расширяемое медицинское устройство, описанное в заявке 2003/0120292, сжимается гильзой до удобной трубчатой формы малого диаметра. Хирург накладывает расширяемое медицинское устройство проведением гильзы сквозь участки ткани, нуждающиеся в анастомозе, выдвижением переднего узла в дистальном направлении из гильзы и выталкиванием устройства плунжером. Выталкивание устройства устраняет усилие сжатия, действующее на устройство, и позволяет устройству принять, приблизительно, кольцевую форму. Большие концы кольцевой формы скрепляют два участка ткани как надежный анастомоз.
Сжатое расширяемое медицинское устройство, которое может быть выполнено из такого материала с памятью формы, как нитинол (nitinol), оказывает усилие по внутреннему диаметру гильзы и стремится деформироваться к его приблизительно кольцевому развернутому положению. Когда устройство выталкивается, усилие, создаваемое устройством при переходе от трубчатой формы к кольцевой форме, двигает расширяемое медицинское устройство в дистальном направлении. Упомянутое перемещение устройства затрудняет для хирурга управление при постановке устройства сквозь стомы двух участков ткани, нуждающихся в анастомозе. Заявители выявили потребность в приложении сдерживающего усилия к дистальному концу расширяемого медицинского устройства для улучшения управляемости хирургом при наложении данного устройства. Ощущается потребность в приспособлении для наложения расширяемого медицинского устройства со сдерживанием стремления устройства к перемещению в дистальном направлении при выталкивании и в способе применения приспособления для наложения медицинского устройства. Дополнительно, целесообразно создать гибкий силовой элемент, поджимающий дистальный наконечник или крышку к выталкивателю, когда данное устройство выталкивается, для управления перемещением устройства в дистальном направлении. В соответствии с настоящим изобретением предлагаются упомянутые приспособление для наложения медицинского устройства и способ.
Сущность изобретения
В соответствии с настоящим изобретением предлагается приспособление для наложения хирургического устройства и способ, который обеспечивает хирургу усовершенствованное управление при наложении устройства. Приспособление для наложения хирургического устройства содержит корпус для сжатия устройства, крышку на конце корпуса, сдерживающий элемент для предотвращения перемещения устройства в проксимальном направлении при перемещении корпуса в проксимальном направлении и силовой элемент, соединяющий крышку с корпусом. Силовой элемент вынуждает отвод крышки и корпуса в проксимальном направлении как одно целое, но обладает достаточной гибкостью, чтобы допускать отрыв крышки от корпуса, когда второе усилие, превосходящее усилие, создаваемое силовым элементом, прилагается к крышке для ее продвижения в дистальном направлении. Силовой элемент прилагает усилие на дистальном конце хирургического устройства, когда приспособление для наложения выталкивает хирургическое устройство.
Краткое описание чертежей
Элементы новизны изобретения обстоятельно изложены в прилагаемой формуле изобретения.
Однако само изобретение в части как устройства, так и способов действия вместе с дополнительными целями и преимуществами данного изобретения более понятно из нижеследующего описания, приведенного со ссылками на прилагаемые чертежи, на которых:
Фиг.1 - вид в изометрии приспособления для наложения хирургического устройства в соответствии с одним вариантом осуществления настоящего изобретения, содержащего расширяемое медицинское устройство.
Фиг.2 - вид в изометрии приспособления для наложения хирургического устройства в соответствии со вторым вариантом осуществления настоящего изобретения.
Фиг.3 - вид в изометрии приспособления для наложения хирургического устройства, изображенного на фиг.2 с вскрытыми внутренними участками.
Фиг.4 - вид в изометрии дистальной стороны ручки приспособления для наложения хирургического устройства, изображенного на фиг.3.
Фиг.5 - вид в изометрии приспособления для наложения хирургического устройства в соответствии с третьим вариантом осуществления настоящего изобретения.
Фиг.6 - вид в изометрии внутренних участков в варианте осуществления, изображенном на фиг.5.
Фиг.7 - вид в изометрии направляющего фиксатора на приспособлении для наложения хирургического устройства, изображенном на фиг.5, с детальным представлением направляющих дорожек.
Фиг.8 - разрез варианта осуществления, изображенного на фиг.1, в заряженном положении.
Фиг.9 - вид в изометрии варианта осуществления, изображенного на фиг.1, с устройством в раздвинутом положении.
Фиг.10 - разрез варианта осуществления, изображенного на фиг.1, с устройством в раздвинутом положении.
Фиг.11 - вид в изометрии варианта осуществления, изображенного на фиг.1, после наложения устройства.
Фиг.12 - разрез варианта осуществления, изображенного на фиг.1, после наложения устройства.
Фиг.13 - разрез варианта осуществления, изображенного на фиг.2, с устройством в заряженном положении.
Фиг.14 - вид в изометрии приспособления для наложения хирургического устройства, изображенного на фиг.2, с устройством в раздвинутом положении.
Фиг.15 - разрез приспособления для наложения хирургического устройства, изображенного на фиг.2, с устройством в раздвинутом положении.
Фиг.16 - вид в изометрии приспособления для наложения хирургического устройства, изображенного на фиг.2, после наложения устройства.
Фиг.17 - разрез приспособления для наложения хирургического устройства, изображенного на фиг.2, после наложения устройства.
Фиг.18 - разрез приспособления для наложения хирургического устройства, изображенного на фиг.5, с устройством в заряженном положении.
Фиг.19 - вид в изометрии направляющего фиксатора, изображенного на фиг.7, показывающий связь между направляющей дорожкой и направляющим зажимом, когда происходит раздвигание устройства.
Фиг.20 - разрез приспособления для наложения хирургического устройства, изображенного на фиг.5, производящего раздвигание устройства.
Фиг.21 - разрез приспособления для наложения хирургического устройства, изображенного на фиг.5, с устройством, раздвинутым и сдерживаемым конической головкой.
Фиг.22 - вид в изометрии направляющего фиксатора, изображенного на фиг.7, показывающий связь между направляющей дорожкой и направляющим зажимом, когда устройство раздвигается и сдерживается конической головкой.
Фиг.23 - разрез приспособления для наложения хирургического устройства, изображенного на фиг.5, с вытолкнутым устройством.
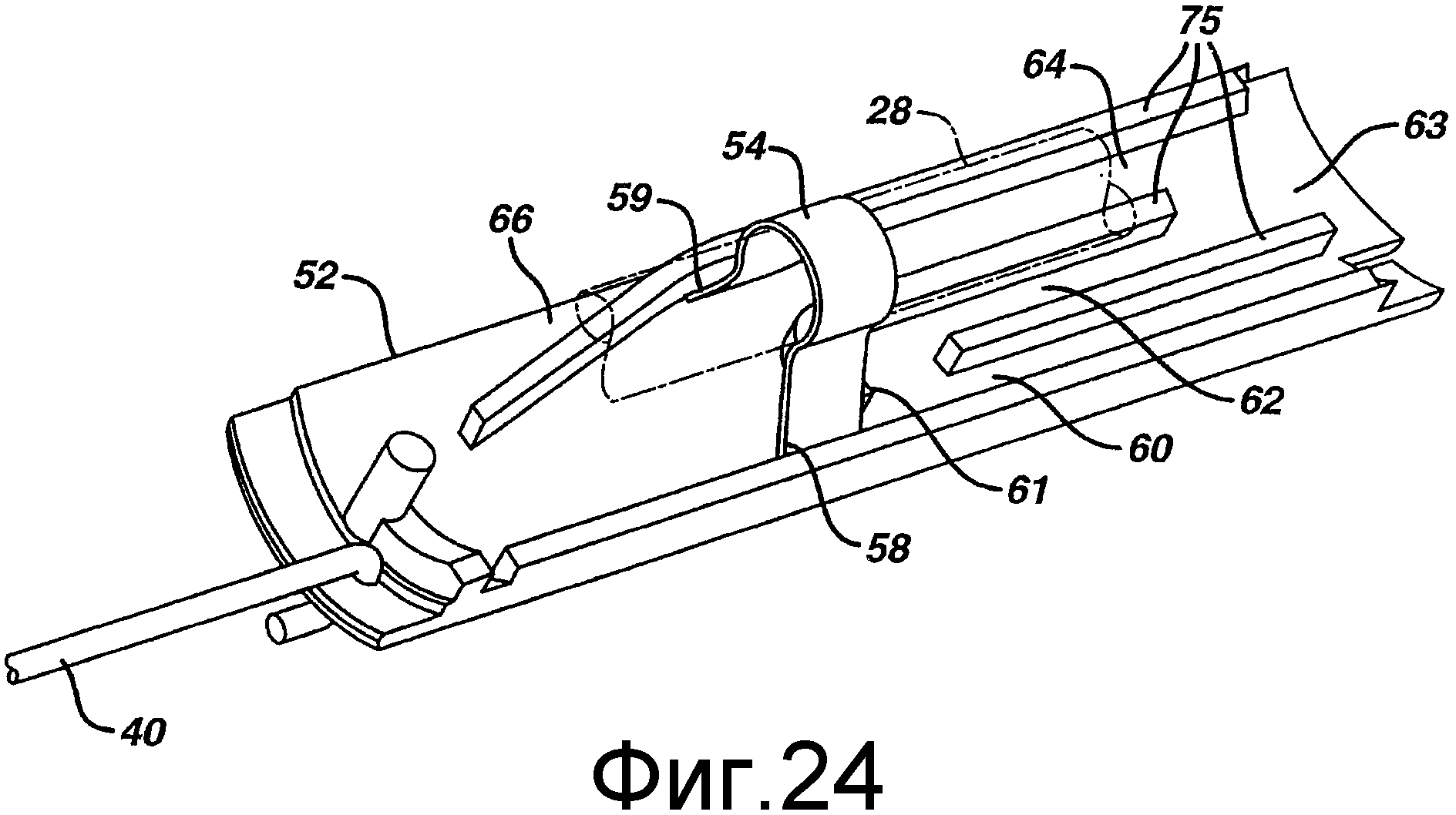
Фиг.24 - разрез направляющего фиксатора, изображенного на фиг.7, показывающий связь между направляющей дорожкой и направляющим зажимом, когда происходит выталкивание устройства.
Фиг.25A - вид в изометрии дистального конца приспособления для наложения хирургического устройства, показывающий коническую головку с затупленной поверхностью.
Фиг.25B - вид в изометрии дистального конца приспособления для наложения хирургического устройства, показывающий коническую головку с поверхностью с пазами.
Фиг.25C - вид в изометрии дистального конца приспособления для наложения хирургического устройства, показывающий коническую головку с выпуклой поверхностью.
Фиг.25D - вид в изометрии дистального конца приспособления для наложения хирургического устройства, показывающий коническую головку с вогнутой поверхностью.
Фиг.25E - вид в изометрии дистального конца приспособления для наложения хирургического устройства, показывающий коническую головку со смещенной изогнутой асимметричной поверхностью.
Фиг.25F - вид в изометрии дистального конца приспособления для наложения хирургического устройства, показывающий коническую головку со сферической поверхностью.
Подробное описание изобретения
На фиг.1 изображено приспособление 10, конструктивно предназначенное для наложения расширяемого медицинского устройства 12. Приспособление 10 для наложения хирургического устройства (далее приспособление 10) содержит корпус или трубку 14 для содержания расширяемого медицинского устройства 12 и внутренних компонентов приспособления 10. Трубка 14 может быть выполнена из формуемого пластика, и, по меньшей мере, участок трубки 14 может быть светопропускающим или прозрачным, чтобы можно было видеть устройство 12 или другие внутренние компоненты. Светопропускание или прозрачность могут также допускать выход света от источника света, расположенного внутри трубки 14, наружу из трубки 14 для освещения участка работы. Направляющая прорезь 16 расположена на трубке 14 около проксимального конца трубки 14. Направляющей прорези 16 можно придать форму с заметными для пользователя упорными положениями или искривленными поверхностями, чтобы направлять пользователя к правильному размещению компонентов приспособления 10 во время приведения в действие приспособления 10. У приспособления 10, изображенного на фиг.1, направляющая прорезь 16 напоминает по форме в первом приближении букву “Z” и продолжается, по меньшей мере, вдоль участка окружности трубки 14. Установочный штифт 18 перемещается внутри направляющей прорези 16 и устанавливает положение участков компонентов приспособления 10. На фиг.1 установочный штифт 18 изображен в виде винта с головкой под торцовый ключ; однако установочный штифт 18 и направляющая прорезь 16 могут быть выполнены в виде любого кулачкового следящего механизма, способного направлять перемещение компонентов приспособления 10. Ручка 20 выдается из проксимального конца приспособления 10 в качестве элемента управления для пользователя. К трубке 14 присоединена также ручка 24 трубки для удерживания пользователем при манипулировании приспособлением 10. Колпачок в форме конической головки 22 размещен на дистальном конце трубки 14. Коническая головка 22 выступает из дистального конца трубки 14 и имеет дистальный конец, сформированный для зацепления и расширения небольшой стомы в ткани. Данный дистальный конец может иметь коническую форму, но может быть также скругленным, асимметричным, заостренным или любой формы, облегчающей ввод в ткань. Коническая головка 22 имеет также на своем проксимальном конце сужение 70 к устройству. Сужение 70 к устройству показано, по существу, коническим по форме, причем сужение обращено в проксимальном направлении к расширяемому медицинскому устройству 12, когда расширяемое медицинское устройство 12 загружено в приспособление 10. Сужение 70 к устройству может также принимать различные формы поверхности, например, такие, как выпуклая искривленная форма, которая может облегчать раздвигание и развертывание расширяемого медицинского устройства 12.
Кроме того, на фиг.1 показан в изометрии внутренний механизм 26 приспособления 10. Стержень 28 толкателя отходит в дистальном направлении от ручки 20 и является полым, по меньшей мере, на участке его длины, чтобы вмещать другие компоненты. Прорезь 30 в стержне толкателя ведет во внутренние участки стержня 28 толкателя и удлинена, чтобы обеспечивать возможность перемещения стержня 28 толкателя и других компонентов внутреннего механизма 26 друг относительно друга, как будет показано. Стержень 28 толкателя снабжен направляющей втулкой 32 вблизи его проксимального конца для сопряжения с трубкой 14 таким образом, чтобы обеспечивать возможность продольного перемещения и вращательного движения стержня 28 толкателя относительно трубки 14. Установочный штифт 18 выступает из направляющей втулки 32. Сдерживающий элемент, называемый толкателем 34 устройства, прикреплен к стержню 28 толкателя вблизи дистального конца стержня 28 толкателя и удерживает расширяемое медицинское устройство 12 от перемещения в проксимальном направлении, когда трубка 14 двигается в проксимальном направлении.
Хотя толкатель 34 устройства изображен, по существу, с плоской дистальной поверхностью, в другом исполнении толкатель 34 устройства может быть с конической дистальной поверхностью, способствующей развертыванию устройства 12.
Шток 36 конической головки соединен с конической головкой 22 и продолжается от нее в проксимальном направлении сквозь стержень 28 толкателя. Зазор скользящей посадки между штоком 36 конической головки и стержнем 28 толкателя допускает продольное перемещение штока 36 конической головки и стержня 28 толкателя друг относительно друга. Прорезь 38 в штоке конической головки прорезана в штоке 36 конической головки и совмещена при использовании с прорезью 30 в стержне толкателя.
Шток 36 конической головки может иметь любую из нескольких конфигураций для облегчения изготовления и применения. Например, шток 36 конической головки может быть неразъемно запрессован в коническую головку 22 и, тем самым, составлять с ней одну деталь. В качестве альтернативы, шток 36 конической головки может содержать резьбовое присоединение с конической головкой 22 или сам может состоять из двух компонентов, которые являются раздвижными для обеспечения возможности регулировки.
Силовой элемент, реализованный в виде пружины 40, соединяет шток 36 конической головки с ручкой 24 трубки сцеплением с прорезью 38 в штоке конической головки. Пружина 40 прилагает механическое усилие, поджимающее шток 36 конической головки и коническую головку 22 в проксимальном направлении. Поскольку ручка 24 трубки крепится к трубке 14, пружина 40 прилагает механическое усилие, стремящееся скреплять коническую головку 22 с трубкой 14, но допускающее относительное перемещение конической головки 22 в сторону от трубки 14 усилием, противоположным усилию пружины 40 и превосходящим данное усилие.
На фиг.2 представлен другой вариант осуществления приспособления 10. Аналогично варианту осуществления приспособления 10, представленному на фиг.1, ручка 24 трубки присоединяется на проксимальном конце трубки 14. Однако в варианте осуществления, представленном на фиг.2, направляющая прорезь 16 выполнена в ручке 24 трубки, а не в трубке 14. Лапка 41, продолжающаяся от пружины 40, крепится к ручке 24 трубки через небольшое отверстие в ручке 24 трубки и может загибаться вокруг участка ручки 24 трубки, чтобы устанавливать ее в нужное положение.
На фиг.3 изображен внутренний механизм 26 варианта осуществления, показанного на фиг.2. Трубка 14 показана на фиг.3 штрихпунктирными линиями для ясности, однако ручка 24 трубки оставлена для демонстрации относительного расположения компонентов. Стержень 28 толкателя отходит в дистальном направлении от ручки 20, как в варианте осуществления, представленном на фиг.2. Половинка 35 толкателя устройства располагается на дистальном конце стержня 28 толкателя и прикреплена к стержню 28 толкателя пружинным кольцом 46. Вторая половинка 35 толкателя устройства, не показанная для лучшей видимости связанных компонентов, стыкуется с половинкой 35 выталкивателя устройства с охватом дистального конца стержня 28 толкателя и образованием толкателя 34 устройства. Шток крышки, показанный в виде штока 36 конической головки, отходящий от крышки, показанной в виде конической 22 головки, вставляется в дистальный конец толкателя 34 устройства. Между толкателем 34 устройства и стержнем 28 толкателя существует зазор, поэтому возможно перемещение штока 36 конической головки и толкателя 34 друг относительно друга. Коническая головка 22 выступает из дистального конца штока 36 конической головки. Как и в варианте осуществления, показанном на фиг.1, коническая 22 головка может составлять со штоком 36 конической головки один компонент, либо коническая головка 22 может быть отдельным компонентом, соединенным со штоком 36 конической головки так, чтобы обеспечивалась возможность регулировки длины участка между конической головкой 22 и штоком 36 конической головки. Конструкция может предусматривать возможность регулировки длины посредством, например, резьбового соединения между конической головкой 22 и штоком 36 конической головки. Кроме того, как в варианте осуществления, представленном на фиг.1, прорезь 38 в штоке конической головки вырезана в конце штока 36 конической головки. Некоторый вариант исполнения установочного штифта 18 выступает радиально из поверхности стержня 28 толкателя вблизи проксимальной стороны стержня 28 толкателя. Ручка 24 трубки присоединена к проксимальному концу трубки 14.
Пружина 40 захватывает прорезь 38 в штоке конической головки и, тем самым, соединяет шток 36 конической головки и ручку 24 трубки. Пружина 40 прилагает механическое усилие, поджимающее шток 36 конической головки и коническую головку 22 в проксимальном направлении. Поскольку ручка 24 трубки прикрепляется к трубке 14, пружина 40 прилагает механическое усилие, стремящееся скрепить коническую головку 22 с трубкой 14, но допускающее относительное смещение конической головки 22 в сторону от трубки 14 усилием, противоположным усилию, прилагаемому пружиной 40, и превосходящим его. В варианте осуществления, показанном на фиг.3, пружина 40 проходит через прорезь 48 для пружины, образованную сопрягающимися половинками 35 выталкивателя.
На фиг.4 представлен вид ручки 24 трубки, применяемой в варианте осуществления, показанном на фиг.2. Вид взят со стороны дистального конца ручки 24 трубки. Направляющая прорезь 16 в ручке 24 трубки, показанная на фиг.3, представлена также на фиг.4. Направляющая прорезь 16 выполнена в виде продольной прорези 42, проходящей параллельно оси ручки 24 с проксимальной стороны ручки 24 трубки и выходящей в горизонтальную прорезь 44 вблизи дистального конца ручки 24. Штифтовый упор 45 в варианте осуществления, показанном на фиг.4, представляет собой стенку для предотвращения дальнейшего движения установочного штифта 18 в дистальном направлении без предварительного вращательного движения стержня 28 толкателя. Направляющая прорезь 16 обеспечивает зазор для перемещения установочного штифта 18 через продольную прорезь 42 и через горизонтальную прорезь 44 и, тем самым, допускает поступательное перемещение установочного штифта 18 и вращение установочного штифта 18 относительно оси стержня 28 толкателя, когда стержень 28 толкателя вращается.
На фиг.5 представлен третий вариант осуществления приспособления 10. Как в других вариантах осуществления, приспособление 10, показанное на фиг.5, содержит трубку 14 с прикрепленной ручкой 24 трубки на дистальном конце последней. Стержень 28 толкателя содержит ручку 20 на проксимальном конце и коническую головку 22 на дистальном конце. Вариант осуществления, представленный на фиг.5, изображен с отверстием 50 для доступа, сквозным по всей длине приспособления 10. Другие варианты осуществления приспособления 10 также могут содержать отверстие 50 для доступа. На проксимальном конце трубки 14 к трубке 14 прикреплен направляющий фиксатор 52, предназначенный для направления перемещений стержня 28 толкателя, как показано далее.
Отверстие 50 для доступа можно использовать для размещения инструмента, чтобы облегчить хирургическую процедуру. Хирург может провести, например, сквозь отверстие 50 для доступа такой инструмент, как проволочный проводник для проведения приспособления 10 в теле, лазерный или хирургический инструмент для осуществления дополнительного лечения, оптическое волокно для подвода света к операционному полю, оптическое волокно, присоединенное к камере для визуализации операционного поля, проводник для подвода электрической энергии или трубку для подвода пневматической энергии. Отверстие 50 для доступа можно герметизировать, например, пробкой из эластомера, когда данное отверстие не применяется, если следует предотвратить попадание газов по таким причинам, как, например, обеспечение пневмоперитонеума.
На фиг.6 изображен вариант осуществления, представленный на фиг.5, с трубкой 14, изображенной штрихпунктирной линией для ясности. В варианте осуществления, представленном на фиг.6, стержень 28 толкателя содержит ручку 20 на проксимальном конце и коническую головку 22 на дистальном конце. Толкатель 34 устройства прикреплен вблизи дистального конца толкателя 28. Пружина 40 соединена с трубкой 14 через направляющий фиксатор 52 и со стержнем 28 толкателя; однако, в качестве альтернативы, пружина 40 может крепиться непосредственно к трубке 14 или любому компоненту, прикрепленному к трубке 14. Как и в предыдущих вариантах осуществления, пружина 40 прилагает усилие, стремящееся поджать коническую головку 22 к трубке 14, поэтому коническая головка 22 и трубка 14 сопряжены с предварительным натягом, но могут быть разведены усилием, достаточным для преодоления предварительного натяга. Направляющий зажим 54 прикреплен к стержню 28 толкателя и находится с направляющим фиксатором 52 в зацеплении такого рода, которое допускает перемещение направляющего зажима 54 и направляющего фиксатора 52 друг относительно друга. Несмотря на крепление направляющего зажима 54 к стержню 28 толкателя данный зажим содержит неподвижную лапку 58 направляющего зажима и отклоняемую лапку 59 направляющего зажима (фиг.7) для скользящего зацепления с участками направляющего фиксатора 52. Неподвижная лапка 58 направляющего зажима остается, по существу, зафиксированной относительно стержня 28 толкателя, а отклоняемая лапка 59 направляющего зажима отклоняется наружу, направляемая искривленными поверхностями на направляющем фиксаторе 52.
На фиг.7 представлен вид в увеличенном масштабе направляющего фиксатора 52, использованного в варианте осуществления приспособления 10, показанного на фиг.5. На данном виде направляющий фиксатор 52 представлен со стороны, которая обращена к внутренней области трубки 14. Проксимальный конец пружины 40 и устанавливающий направляющий зажим 54 также показаны на фиг.7. Направляющий фиксатор 52 содержит управляющую дорожку 56 для направления и управления перемещением стержня 28 толкателя посредством действия направляющего зажима 54. Управляющая дорожка 56 состоит из четырех дорожек для направления и управления стержнем 28 толкателя. Данными четырьмя дорожками являются дорожка 60 раздвигания, дорожка 62 возврата, дорожка 64 выталкивания и финишная дорожка 66. Направляющие ребра 75 на поверхности направляющего фиксатора 52 разделяют дорожки. Упор 61 раздвигания находится в дистальном конце дорожки 62 возврата, а возвратная прорезь 63 образует открытый проход между дорожкой 62 возврата и дорожкой 64 выталкивания вблизи проксимального конца дорожек. Дистальная возвратная прорезь 65 открывает проход между дорожкой 60 раздвигания и дорожкой 62 возврата вблизи дистальных концов дорожек. Неподвижная лапка 58 направляющего зажима и отклоняемая лапка 59 направляющего зажима изображены предварительно стянутыми и сжатыми двумя направляющими ребрами 75 для движения в дорожке 60 раздвигания. В свободном состоянии неподвижная лапка 58 направляющего зажима и отклоняемая лапка 59 направляющего зажима расходятся на расстояние, охватывающее шаг между финишной дорожкой 66 и дорожкой 60 раздвигания. В процессе срабатывания механизма управляющая дорожка 56 допускает последующие расжимание и отход отклоняемой лапки 59 направляющего зажима в расжатое состояние без предварительного стягивания. Неподвижная лапка 58 направляющего зажима остается в дорожке 60 раздвигания, а отклоняемая лапка 59 направляющего зажима перемещается к финишной дорожке 66 и в нее.
Каждый вариант осуществления приспособления 10 характеризуется некоторой последовательностью операций, как показано далее. Общим для вариантов осуществления является то, что коническая головка 22 прилагает усилие, создаваемое пружиной 40, для раздвигания расширяемого медицинского устройства 12. Когда расширяемое медицинское устройство 12 не выходит за дистальный конец трубки 14, коническая головка 22 закрывает конец трубки 14 и зафиксирована на месте усилием, прилагаемым пружиной 40. Когда на коническую головку 22 действует усилие против усилия пружины 40 и превосходящее усилие, прилагаемое пружиной 40, пружина 40 отклоняется и дает конической головке 22 возможность оторваться от трубки 40.
В варианте осуществления, показанном на фиг.1, приспособление 10 действует, как показано на фиг.8-12. На фиг.8 изображен вариант осуществления, заряженный медицинским устройством, например, расширяемым медицинским устройством 12. Трубка 14 содержит расширяемое медицинское устройство 12. Расширяемое медицинское устройство 12 может служить для скрепления двух участков ткани с целью хирургического лечения.
Хирург может уверенно взять приспособление 10 и поместить его в тело пациента. Хирург может, например, уверенно взять приспособление 10, при этом указательный и средний пальцы должны быть на ручке 24 трубки, а большой палец - на ручке 20. Хирург проводит приспособление 10 в любом варианте осуществления к участку тела вблизи органов, нуждающихся в хирургическом лечении, например, в наложении анастомоза. Хирург может, например, сначала отделить секцию тонкой кишки в ходе одной медицинской процедуры, например, операции желудочного шунтирования. Или хирург может анастомозировать кишку, оставленную при удалении ракового участка кишки. Хирург может создать стому в секции тонкой кишки и выдвинуть приспособление 10 через секцию тонкой кишки в место, где требуется другая стома. Затем хирург может создать вторую стому в стенке той же секции и третью стому в другой секции тонкой кишки, подлежащей анастомозированию. Затем приспособление 10 можно выдвинуть через вторую и третью стомы в двух секциях тонкой кишки. Стенки, содержащие вторую и третью стомы, могут быть показаны как проксимальный участок 68 ткани и дистальный участок 69 ткани. Соединение данных участков ткани может создать кишечный анастомоз, когда участки тканей представляют собой участки просветов кишок. После выдвижения приспособления 10 сквозь проксимальный участок 68 ткани и дистальный участок 69 ткани, хирург может работать с приспособлением 10 для выполнения такой медицинской процедуры, как наложение анастомоза.
Хирург поджимает ручку 24 трубки к ручке 20. Ручка 24 трубки, прикрепленная к трубке 14, подтягивает трубку 14 к ручке 20. Противодействующее усилие, прилагаемое хирургом к ручке 20, передается через стержень 28 толкателя на толкатель 34 устройства и на расширяемое медицинское устройство 12. Когда трубка 14 скользит в проксимальном направлении, толкатель устройства 34 сдерживает какое-либо перемещение расширяемого медицинского устройства 12 в проксимальном направлении. Пружина 40, подсоединенная между ручкой 24 трубки и штоком 36 конической головки, прилагает усилие, стремящееся подтянуть шток 36 конической головки в проксимальном направлении. При нахождении приспособления 10 в данном первом положении, в начале процесса наложения, шток 36 конической головки подтягивает коническую головку 22 в проксимальном направлении и, тем самым, обеспечивает контакт с трубкой 14 с предварительным натягом, так что коническая головка 22 двигается в проксимальном направлении как одно целое с трубкой 14 относительно толкателя устройства 34. Шток 36 конической головки вдвигается во внутренний диаметр стержня 28 толкателя. Когда коническая головка 22 достигает дистального конца расширяемого медицинского устройства 12, сужение 70 к устройству контактирует с расширяемым медицинским устройством 12 для его раздвигания. Расширяемое медицинское устройство 12 прилагает противодействующее усилие к конической головке 22. Когда противодействующее усилие в дистальном направлении превышает усилие, прилагаемое пружиной 40, противодействующее усилие растягивает пружину 40 и слегка отделяет коническую головку 22 от трубки 14. Раздвигание расширяемого медицинского устройства 12 начинается выходом из отверстия, создаваемого между трубкой 14 и конической головкой 22, как показано на фиг.9 и 10.
На фиг.9 и 10 показано раздвинутое расширяемое медицинское устройство 12, выходящее из приспособления 10. Когда коническая головка 22 движется к расширяемому медицинскому устройству 12, сужение 70 к устройству выполняет функцию уклона для облегчения раздвигания и раскрытия расширяемого медицинского устройства 12. Сужение 70 к устройству прилагает усилие к внутреннему участку расширяемого медицинского устройства 12 для раздвигания расширяемого медицинского устройства 12 и увеличения диаметра дистального конца расширяемого медицинского устройства 12. Кроме того, сдерживание расширяемого медицинского устройства 12 конической головкой 22 не допускает выталкивания расширяемого медицинского устройства 12 из трубки 14 прежде, чем расширяемое медицинское устройство 12 не установится в правильное положение, смежное с участками ткани, подлежащими хирургическому вмешательству. Хирург может применить раздвинутый участок расширяемого медицинского устройства 12, когда оно прихвачено усилием, прилагаемым конической головкой 22, для подтягивания дистального участка 69 ткани к проксимальному участку 68 ткани, чтобы выполнить процедуру типа наложения анастомоза. Приспособление 10 с выступающим раздвинутым участком прихваченного расширяемого медицинского устройства 12 можно использовать как инструмент для манипулирования тканью.
Когда трубка 14 перемещается к ручке 20, проксимальный осевой участок “Z”-образной направляющей прорези 16 перемещается относительно установочного штифта 18. Когда расширяемое медицинское устройство 12 раздвигается в правильное положение для манипулирования тканью участок, проходящий по окружности направляющей прорези 16, упирается в установочный штифт 18 и тем самым препятствует любому дальнейшему перемещению трубки 14 к ручке 20. Чтобы возобновить любое дальнейшее линейное перемещение хирург после этого должен повернуть трубку 14 относительно установочного штифта 18.
На фиг.9 показано, что участок, проходящий по окружности направляющей прорези 16, перемещается относительно и вдоль установочного штифта 18. Когда дистальный осевой участок направляющей прорези 16 совместится с установочным штифтом 18, становится возможным дальнейшее перемещение трубки 14 к ручке 20. После поворота трубки 14 относительно ручки 20 с исполнением окружного перемещения направляющей прорези 16 и установочного штифта 18 друг относительно друга и после размещения дистального участка 69 ткани и проксимального участка 68 ткани вблизи дистального конца приспособления 10, как показано на фиг.10, хирург оказывается подготовленным к выталкиванию расширяемого медицинского устройства 12 из приспособления 10.
На фиг.11 и 12 изображено приспособление 10 в варианте осуществления, показанном на фиг.1, с вытолкнутым расширяемым медицинским устройством 12. Чтобы вытолкнуть расширяемое медицинское устройство 12 хирург продолжает перемещать трубку 14 к ручке 20. Пружина 40 продолжает подтягивать коническую головку 22 в проксимальном направлении, а шток 36 конической головки, соединенный с конической головкой 22, свободно скользит в стержне 28 толкателя. Коническая головка 22 все еще предварительно подтянута к раздвинутому расширяемому медицинскому устройству 12, и расширяемое медицинское устройство 12 продолжает выходить из дистального конца трубки 14. Когда проксимальный конец прорези 38 в штоке конической головки, где закреплена пружина 40, достигает проксимального конца прорези 30 в стержне толкателя, пружина 40 начинает прилагать усилие к стержню 28 толкателя. При этом пружина 40 протянута между стержнем 28 толкателя и ручкой 24 трубки. Дальнейшее перемещение трубки 14 в проксимальном направлении относительно стержня 28 толкателя растягивает пружину 40. Пружина 40 больше не создает предварительный натяг конической головки 22 к расширяемому медицинскому устройству 12. Если проксимальный конец прорези 30 в штоке конической головки перемещается в проксимальном направлении к проксимальному концу прорези 38 в стержне толкателя, то усилие, прилагаемое к проксимальному концу конической головки 22 участками тканей или расширяемым медицинским устройством 12, больше не преодолевается усилием от пружины 40, и тогда коническая головка 22 отжимается в дистальном направлении. Коническая головка 22 и стержень 28 толкателя больше не перемещаются друг относительно друга, и потому отсутствует перемещение конической головки 22 и толкателя 34 устройства друг относительно друга. Однако в данном последнем выдвинутом положении, когда расширяемое медицинское устройство 12 приближается к выталкиванию, трубка 14 перемещается относительно конической головки 22 и толкателя 34 устройства. Промежуток между толкателем 34 устройства и конической головкой 22, содержащий расширяемое медицинское устройство 12, выходит из трубки 14 для завершения выталкивания расширяемого медицинского устройства 12, когда трубка 14 подтягивается в проксимальном направлении. Расширяемое медицинское устройство 12 принимает правильную ориентацию и геометрию для выполнения используемой хирургической процедуры. Взаимное расположение компонентов приспособления 10 после выталкивания расширяемого медицинского устройства 12 показаны на фиг.11 и 12.
Фиг.13-17 иллюстрируют порядок работы приспособления 10 в соответствии с вариантом осуществления, представленным на фиг.2. На фиг.13 показан вариант осуществления приспособления 10, заряженного расширяемым медицинским устройством 12. Чтобы начать выталкивание расширяемого медицинского устройства 12 хирург поджимает ручку 24 трубки к ручке 20. Ручка 24 трубки, прикрепленная к трубке 14, подтягивает трубку 14 к ручке 20. Противодействующее усилие, прилагаемое хирургом к ручке 20, передается через стержень 28 толкателя, пружинное кольцо 46 и толкатель 34 устройства на расширяемое медицинское устройство 12. Когда трубка 14 скользит в проксимальном направлении, толкатель 34 устройства сдерживает какое-либо перемещение расширяемого медицинского устройства 12 в заднем направлении. Одновременно, усилие, прилагаемое пружиной 40, подсоединенной между ручкой 24 трубки и штоком 36 конической головки, поджимает шток 36 конической головки в проксимальном направлении сквозь толкатель 34 устройства. Шток 36 конической головки подтягивает коническую головку 22 в проксимальном направлении и, тем самым, обеспечивает контакт с трубкой 14 с предварительным натягом, так что трубка 14 и коническая головка 22 двигаются в проксимальном направлении как одно целое. Когда коническая головка 22 достигает дистального конца расширяемого медицинского устройства 12, сужение 70 к устройству контактирует с расширяемым медицинским устройством 12 для его раздвигания. Расширяемое медицинское устройство 12 прилагает к конической головке 22 противодействующее усилие, превосходящее усилие, прилагаемое пружиной 40, и, тем самым, растягивает пружину 40 и слегка отделяет коническую головку 22 от трубки 14. Раздвигание расширяемого медицинского устройства 12 начинается выходом из отверстия, создаваемого между трубкой 14 и конической головкой 22, как показано на фиг.14 и 15.
На фиг.15 показано в разрезе раздвинутое расширяемое медицинское устройство 12, выходящее из варианта осуществления приспособления 10. Поскольку пружина 40 продолжает поджимать коническую головку 22 в проксимальном направлении к трубке 14, сужение 70 к устройству выполняет функцию уклона для облегчения раздвигания и раскрытия расширяемого медицинского устройства 12. Кроме того, сдерживание расширяемого медицинского устройства 12 конической головкой 22 не допускает выталкивания расширяемого медицинского устройства 12 из трубки 14 прежде, чем расширяемое медицинское устройство 12 не установится в правильное положение, смежное с участками ткани, подлежащими хирургическому вмешательству. Хирург может применить раздвинутый участок расширяемого медицинского устройства 12, когда оно прихвачено усилием, прилагаемым конической головкой 22, для подтягивания дистального участка 69 ткани к проксимальному участку 68 ткани, чтобы выполнить процедуру типа наложения анастомоза. Приспособление 10 с выступающим раздвинутым участком прихваченного расширяемого медицинского устройства 12 можно использовать как инструмент для манипулирования тканью во время хирургической процедуры.
Когда ручка 24 трубки перемещается в проксимальном направлении, направляющая прорезь 16 в ручке 24 трубки перемещается в проксимальном направлении относительно установочного штифта 18 по продольному разрезу 42. Когда расширяемое медицинское устройство 12 раздвигается в правильное положение, штифтовый упор 45 упирается в установочный штифт 18 и, тем самым, препятствует любому дальнейшему перемещению трубки 14 к ручке 20. Чтобы возобновить любое дальнейшее линейное перемещение хирург после этого должен повернуть трубку 14 относительно установочного штифта 18. В горизонтальной прорези 44 (фиг.5) существует зазор для обеспечения данного вращения. После того, как установочный штифт 18 повернется вдоль штифтового упора 45, становится возможным дальнейшее перемещение трубки 14 к ручке 20, и хирург оказывается подготовленным к полному выталкиванию расширяемого медицинского устройства 12 из приспособления 10.
На фиг.16 и 17 показано в разрезе расширяемое медицинское устройство 12, вытолкнутое из приспособления 10 и сцепляющее проксимальный участок 68 ткани с дистальным участком 69 ткани. Чтобы завершить выталкивание расширяемого медицинского устройства 12 хирург продолжает перемещать трубку 14 к ручке 20. Пружина 40 продолжает подтягивать коническую головку 22 в проксимальном направлении, а шток 36 конической головки, соединенный с конической головкой 22, свободно скользит в толкателе 34 устройства. Коническая головка 22 все еще предварительно подтянута к раздвинутому расширяемому медицинскому устройству 12 усилием, прилагаемым пружиной 40. Когда проксимальный конец штока 36 конической головки, где прикреплена пружина 40, достигает дистального конца стержня 28 толкателя, усилие начинает прилагаться к стержню 28 толкателя. Коническая головка 22 больше не может следовать за трубкой 14 в проксимальном направлении и больше не поджимается к трубке 14 предварительным натягом. Дальнейшее перемещение трубки 14 в проксимальном направлении относительно стержня 28 толкателя растягивает пружину 40. Коническая головка 22 и выталкиватель 34 устройства больше не перемещаются друг относительно друга. Однако трубка 14 перемещается относительно конической головки 22 и толкателя 24 устройства. Промежуток между толкателем 34 устройства и конической головкой 22, содержащий расширяемое медицинское устройство 12, выходит из трубки 14 для выталкивания расширяемого медицинского устройства 12, когда трубка 14 подтягивается в проксимальном направлении.
Фиг.18-23 иллюстрируют порядок работы приспособления 10 в соответствии с вариантом осуществления, представленным на фиг.5. На фиг.18 показано приспособление 10 согласно варианту осуществления, представленному на фиг.5, в заряженном положении, с расширяемым медицинским устройством 12, находящимся в трубке 14. Усилие, прилагаемое пружиной 40, упирает коническую головку 22 в дистальный конец трубки 14. Хирург перемещает трубку 14 в проксимальном направлении к ручке 20 против усилия пружины 40 с захватом ручки 24 трубки как в предыдущих вариантах осуществления. Трубка 14 перемещается в проксимальном направлении относительно стержня 28 толкателя и толкателя 34 устройства. Толкатель 34 устройства сдерживает перемещение расширяемого медицинского устройства 12 в проксимальном направлении. Когда трубка 14 перемещается в проксимальном направлении, между трубкой 14 и конической головкой 22 раскрывается просвет. Расширяемое медицинское устройство 12 начинает выходить из дистального конца трубки 14.
На фиг.19 представлен вид в изометрии направляющего фиксатора 52 и направляющего зажима 54. Направляющий фиксатор 52 прикреплен к трубке 14 и перемещается в проксимальном направлении с направляющим зажимом 54. Когда направляющий фиксатор 52 перемещается в проксимальном направлении, управляющая дорожка 56 перемещается относительно направляющего зажима 54 для управления перемещениями трубки 14. Когда трубка 14 перемещается в проксимальном направлении из положения, показанного на фиг.18, дорожка раздвигания 60 перемещается вдоль неподвижной лапки 58 направляющего зажима и отклоняемой лапки 59 направляющего зажима, пока упор 61 раздвигания не упирается в направляющий зажим 54. Упор 61 раздвигания не допускает дальнейшего перемещения трубки 14 в проксимальном направлении. Когда упор 61 раздвигания примкнет к направляющему зажиму 54, отклоняемая лапка 59 направляющего зажима будет перемещаться по дистальной возвратной прорези 65 к дорожке 62 возврата. При этом приспособление 10 занимает положение, показанное на фиг.20, с расширяемым медицинским устройством 12, выходящим из дистального конца трубки 14. Снятие усилия с трубки 14 позволит пружине 40 переместить трубку 14 в дистальном направлении в положение, показанное на фиг.21.
На фиг.21 изображено в разрезе приспособление 10 в соответствии с вариантом осуществления, показанным на фиг.6, с расширяемым медицинским устройством 12, раздвинутым из дистального конца трубки 14. Когда хирург снимает усилие с ручки 24 трубки, пружина 40 подтягивает трубку 14 в дистальном направлении к конической головке 22. Сужение 70 к устройству контактирует с расширяемым медицинским устройством 12 и, тем самым, способствует раздвиганию расширяемого медицинского устройства 12. Усилие пружины 40 прилагается к устройству 12.
Данный вариант осуществления приспособления 10 в конфигурации, показанной на фиг.21, почти так, как в предыдущих вариантах осуществления, можно использовать для захвата дистальной стенки 69 ткани для ее приближения к проксимальной стенке ткани, чтобы выполнить хирургическую процедуру типа наложения анастомоза. Хирург может применить приспособление 10 с раздвинутым расширяемым медицинским устройством 12 в качестве инструмента для манипулирования тканью.
На фиг.22 изображены направляющий фиксатор 52 и направляющий зажим 54, когда приспособление 10 находится в раздвинутом положении, показанном на фиг.21. Направляющий фиксатор 52 переместился в исходное положение относительно направляющего зажима 54, пока отклоняемая лапка 59 направляющего зажима находилась в дорожке 62 возврата. Затем отклоняемая лапка 59 направляющего зажима перемещалась по возвратной прорези 63 в дорожку 64 выталкивания, когда направляющий фиксатор 52 достигал исходного положения с направляющим зажимом 54 на проксимальном конце данного фиксатора.
На фиг.23 изображено расширяемое медицинское устройство 12, выталкиваемое приспособлением 10. После размещения расширяемого медицинского устройства 12 в заданном положении хирург может вытолкнуть устройство 12 подтягиванием ручки 24 трубки к ручке 20, чтобы снова поджать трубку 14 в проксимальном направлении относительно стержня 28 толкателя. Когда толкатель 34 устройства приходит в контакт с проксимальным концом расширяемого медицинского устройства 12, дальнейшее перемещение расширяемого медицинского устройства 12 в проксимальном направлении не допускается. Трубка 14 перемещается в проксимальном направлении от расширяемого медицинского устройства 12 для его развертывания.
Фиг.24 иллюстрирует действие направляющего фиксатора 52, перемещающегося в проксимальном направлении вдоль направляющего зажима 54 в то время, как приспособление 10 развертывает расширяемое медицинское устройство 12. Дорожка 64 выталкивания перемещается в проксимальном направлении вдоль отклоняемой лапки 59 направляющего зажима. Поскольку в дистальном конце дорожки 64 выталкивания отсутствует упор, трубка 14 может перемещаться далее в проксимальном направлении в положение, позволяющее толкателю 34 устройства полностью вытолкнуть расширяемое медицинское устройство 12. Изгиб направляющего ребра 75, смежного с дорожкой 64 выталкивания прилагает поперечное усилие к отклоняемой лапке 59 направляющего зажима и, тем самым, перемещает ее ближе к неподвижной лапке 58 направляющего зажима. Усилие, создаваемое перемещающейся отклоняемой лапкой 59 направляющего зажима, может предоставлять хирургу ответное тактильное ощущение, что трубка 14 достигает конца ее допустимого перемещения в проксимальном направлении. После того как трубка 14 достигает предельного положения в проксимальном направлении, и вытолкнуто устройство 12, хирург может ослабить усилие подтягивания ручки 24 трубки к ручке 20. Пружина 40 будет подтягивать трубку 14 в дистальном направлении относительно ручки 20, пока финишная дорожка 66 перемещается в дистальном направлении вдоль отклоняемой лапки 59 направляющего зажима. Приспособление 10 вытолкнуло расширяемое медицинское устройство 12.
Очевидно, что приведенные описания перемещения участков приспособления 10 характеризуют относительные перемещения элементов друг относительно друга. Например, перемещение трубки 14 в проксимальном направлении к ручке 20 можно также характеризовать как перемещение ручки 20 в дистальном направлении к трубке 14. В качестве другого примера, перемещение трубки 14 в проксимальном направлении вдоль толкателя 34 устройства можно также характеризовать как перемещение толкателя 34 устройства в дистальном направлении внутри неподвижной трубки 14. В последнем примере в описании указано, что расширяемое медицинское устройство 12 удерживается от перемещения в проксимальном направлении толкателем 34 устройства, когда трубка 14 перемещается вдоль него в проксимальном направлении. При перемене неподвижного элемента с толкателя 34 устройства на трубку 14 описание изменится так, что расширяемое медицинское устройство 12 будет поджиматься в дистальном направлении толкателем 34 устройства, выдвигающимся в дистальном направлении.
Следует понимать, что иллюстрированные и описанные выше конструкции можно заменить эквивалентными конструкциями, и что описанный вариант осуществления изобретения является не единственной конструкцией, которую можно применить для реализации заявленного изобретения. В одном примере эквивалентной конструкции, которую можно применить для реализации настоящего изобретения, можно использовать гидравлическую, электронную или пневматическую систему для перемещения трубки 14 относительно толкателя 34 устройства. Можно применить компьютерное управление совместно с электронной системой и контуром обратной связи для перемещения трубки 14 и избирательного напряжения силового элемента с учетом величины усилия, прилагаемого к ткани. В еще одном примере эквивалентной конструкции, которую можно применить для реализации настоящего изобретения, можно использовать робототехническую систему с приспособлением 10, соединенным с управляемой роботизированной рукой, которая перемещает механизм приспособления 10 для наложения анастомоза. Робототехническая система позволила бы хирургу выполнять процедуру с места, удаленного от операционного поля.
В следующем примере эквивалентной конструкции трубка 14 может быть гибкой трубкой и механизмы в приспособлении 10 могут быть гибкими для проведения сквозь длинный просвет, например, участок тонкой кишки, чтобы наложить анастомоз через длинный гибкий просвет. Данную длинную гибкую трубку можно применять лапароскопическим или эндоскопическим способами.
В следующем примере эквивалентной конструкции приспособление 10 может содержать длинную жесткую изогнутую трубку или длинную жесткую прямую трубку, и приспособление 10 можно размещать через закрытый порт доступа и применять лапароскопическим или эндоскопическим способами. Длина и кривизна дают преимущества при эндоскопической или лапароскопической хирургии, в частности, при выполнении хирургической процедуры на пациенте с ожирением. Как при жестком, так и при гибком исполнении приспособления 10, ограничение газового потока через прибор обеспечивает преимущество, когда требуется обеспечивать пневмоперитониум, как, например, при эндоскопической хирургии.
В следующем примере эквивалентной конструкции и способа, которые можно применить для реализации настоящего изобретения, приспособление 10 может обладать достаточно малыми геометрическими параметрами для удобства ввода через отверстие порта мануального доступа, используемого для ручной лапароскопической хирургии, например, порта Lap-Disk® для захватного устройства, выпускаемого компанией Ethicon Endo-Surgery, Цинциннати, шт. Огайо. Хирург, вводящий приспособление 10 через порт мануального доступа, может работать с эндоскопом для визуализации через второй порт и может также обеспечивать пневмоперитонеум. Хирург может также применять троакары, зажимы, боры и другие эндоскопические инструменты, вставляемые через вспомогательные порты для содействия захвату просветов или созданию стом в просветах для выполнения хирургических процедур типа наложения анастомоза.
В следующем примере эквивалентной конструкции и способа, которые можно применить для реализации настоящего изобретения, можно вводить удлиненную жесткую модификацию приспособления 10 или удлиненную гибкую модификацию приспособления 10 через вспомогательный порт, при этом хирург манипулирует тканью захватным приспособлением, вводимым через порт мануального доступа.
В других примерах эквивалентных конструкций поверхность дистального конуса 71 на конической головке 22 может принимать многочисленные формы, полезные в разнообразных случаях манипулирования тканью, как показано на фиг.25A-25F. На фиг.25A представлена коническая заостренная головка, которая затуплена для меньшего травмирования тканей и для улучшения обзора за дистальным концом. Фиг.25B иллюстрирует головку, которая снабжена пазами для создания возможности приложения к ткани крутящего момента. На фиг.25B изображены четыре паза, хотя может быть достаточно трех или любого другого числа пазов. Фиг.25C иллюстрирует головку с выпуклой искривленной поверхностью для быстрого расширения стомы на коротком участке, а на фиг.25D показана головка с вогнутой поверхностью для слабого расширения рыхлой ткани. Головка со смещенной изогнутой поверхностью, показанная на фиг.25E, применима благодаря ее асимметрии для улучшения обзора с одной стороны, и может быть применена для облегчения манипулирования путем использования ее асимметрии для минимального захвата ткани. На фиг.25F показана сферическая головка для создания короткого участка для операции в ограниченном пространстве и для снижения риска травмирования ткани. Сочетание данных поверхностей также может быть выгодным, например, головка с вогнутой поверхностью, показанной на фиг.25D, может также содержать пазы, изображенные на фиг.25B. Специалистам в данной области техники очевидны другие сочетания.
Хотя в настоящем описании представлены и рассмотрены предпочтительные варианты осуществления настоящего изобретения, специалистам в данной области техники очевидно, что данные варианты осуществления предложены только для примера. Специалистам в данной области техники очевидны из настоящего описания многочисленные варианты, изменения и замены, не выходящие за пределы настоящего изобретения. Следовательно, предполагается, что настоящее изобретение ограничено только существом и объемом прилагаемой формулы изобретения.
Реферат
Изобретение относится к хирургии и может быть использовано при видоизменении органов и сосудов. При способе выполнения хирургической процедуры обеспечивают приспособление для наложения хирургического устройства, которое содержит трубку с продольной осью между концами и стержень толкателя с колпачком. Колпачок соединен с дистальным концом стрежня толкателя. Сдерживающий элемент расположен на стержне толкателя с проксимальной стороны от упомянутого колпачка. Стержень толкателя расположен в упомянутой трубке так, что колпачок находится с дистальной стороны от дистального конца трубки и поджат пружиной к данному концу. Приспособление содержит расширяемое медицинское устройство в дистальном конце трубки между сдерживающим элементом и колпачком. Перемещают трубку в проксимальном направлении относительно стержня толкателя на заданное расстояние так, чтобы развернуть дистальный конец упомянутого устройства, при этом колпачок остается поджатым в направлении трубки. Перемещают трубку в проксимальном направлении относительно стержня толкателя на второе заданное расстояние так, чтобы развернуть проксимальный конец расширяемого медицинского устройства. В результате для хирурга обеспечивается усовершенствованное управление при наложении устройства. 1 з.п. ф-лы, 25 ил.
Формула
а. обеспечивают приспособление для наложения хирургического устройства, содержащее трубку, имеющую дистальный конец, проксимальный конец и продольную ось между ними и стержень толкателя, имеющий колпачок, соединенный с его дистальным концом, и сдерживающий элемент, расположенный на нем с проксимальной стороны от упомянутого колпачка, при этом упомянутый стержень толкателя расположен в упомянутой трубке так, что упомянутый колпачок находится с дистальной стороны от упомянутого дистального конца упомянутой трубки и поджат пружиной к данному концу, и расширяемое медицинское устройство в упомянутом дистальном конце упомянутой трубки между упомянутым сдерживающим элементом и упомянутым колпачком, при этом упомянутое медицинское устройство имеет дистальный и проксимальный концы;
b. перемещают упомянутую трубку в проксимальном направлении относительно упомянутого стержня толкателя на заданное расстояние так, чтобы развернуть упомянутый дистальный конец упомянутого устройства, при этом упомянутый колпачок остается поджатым в направлении упомянутой трубки; и
с) перемещают упомянутую трубку в проксимальном направлении относительно упомянутого стержня толкателя на второе заданное расстояние так, чтобы развернуть упомянутый проксимальный конец упомянутого расширяемого медицинского устройства.
а. создают первую стому в первом просвете в теле;
b. создают вторую стому во втором просвете в теле;
с.вводят упомянутое приспособление через первую стому и вторую стому;
при этом развертывают упомянутое расширяемое медицинское устройство так, что упомянутое расширяемое устройство создает анастомоз между первым просветом в теле и вторым просветом в теле.
Комментарии