Производственная позиционирующая система - RU2177403C2
Код документа: RU2177403C2
Чертежи
Описание
Настоящее изобретение относится к управлению производственными установками, такими как промышленные роботы, использующиеся в цехах заводов, в измерительных системах, в хирургии и т.д. Изобретение также относится к области управления станками.
Более конкретно, изобретение относится к электрооптическим измерительным системам в сочетании с вышеупомянутым управлением.
Большинство отдельных компонентов, используемых для предложенных способа позиционирования и позиционирующего устройства, уже известны, но не были ранее объединены предложенным здесь образом.
Известными ранее позиционирующими системами, например, для промышленных роботов управляют так же, как станками с числовым программным управлением, т. е. блок управления позиционированием получает значения входных данных от информационной управляющей системы, после чего блок управления передает управляющую информацию, касающуюся положения в трех измерениях, скорости вращения и другого движения, позиционирующему элементу с его позиционирующей головкой.
Это управление происходит совершенно независимо от положения объекта воздействия. Все движения и положения позиционирующей головки предполагают, что объект воздействия находится в определенном положении и имеет определенные размеры. Крепление обрабатываемой детали и расположение всех ее частей определяет, таким образом, допуски при обработке. Регулировка должна быть выполнена, например, при изменении температуры, износе подшипников и при влиянии других факторов, оказывающих отрицательное воздействие на первоначально предусмотренное взаимное расположение объекта воздействия и позиционирующей головки. Это является значительным недостатком существующих систем.
Известен способ позиционирования для производственной системы позиционирования позиционирующей головки относительно объекта воздействия, содержащей позиционирующее устройство с позиционирующим блоком, блоком управления позиционированием позиционирующего блока и управляющей информационной системой блока управления позиционированием, включающий регистрацию и определение пространственного положения позиционирующей головки относительно объекта воздействия с использованием целеуказателей (Юревич Е.И. и др. Устройство промышленных роботов, Ленинград, Машиностроение, 1980, с. 304-307, рис. VII. 5). Из того же источника известно позиционирующее устройство производственной системы позиционирования позиционирующей головки относительно объекта воздействия, содержащее позиционирующий блок, блок управления позиционированием позиционирующего блока, управляющую информационную систему блока управления позиционированием и целеуказатели. Однако, известные способ и устройство не обеспечивают достаточной точности позиционирования позиционирующей головки относительно объекта воздействия.
Задачей изобретения является повышение точности позиционирования позиционирующей головки относительно объекта воздействия для управления роботами или другими системами, такими как упомянутые выше, при решении различных задач с применением электрооптических систем, таких как системы трехмерного технического зрения, лазерные следящие системы, интерферометрические системы и т.д.
Изобретение предлагает способ позиционирования для производственной системы позиционирования позиционирующей головки относительно объекта воздействия, содержащей позиционирующее устройство с позиционирующим блоком, блоком управления позиционированием позиционирующего блока и управляющей информационной системой блока управления позиционированием, включающий регистрацию и определение пространственного положения позиционирующей головки относительно объекта воздействия с использованием целеуказателей, при этом, согласно изобретению, регистрацию и определение пространственного положения позиционирующей головки осуществляют с помощью по меньшей мере одного регистрирующего устройства для определения и регулировки пространственного положения позиционирующей головки, входящего в состав измерительной системы трехмерного определения местоположения, выполненной с возможностью взаимодействия с управляющей информационной системой, при этой используют целеуказатели, выполненные с возможностью обеспечения точного измерения их положения, которые размещают на объекте воздействия и/или объектах, расположенных в фиксированном положении и постоянно связанных с объектом воздействия, и на позиционирующей головке и/или приспособлениях, связанных с ней.
В качестве позиционирующего блока может быть использован робот или станок.
Кроме того, предлагается позиционирующее устройство производственной системы позиционирования позиционирующей головки относительно объекта воздействия, содержащее позиционирующий блок, блок управления позиционированием позиционирующего блока, управляющую информационную систему блока управления позиционированием и целеуказатели, при этом, согласно изобретению, позиционирующее устройство снабжено измерительной системой трехмерного определения местоположения, содержащей по меньшей мере одно регистрирующее устройство для определения и регулировки положения позиционирующей головки в пространстве, выполненное с возможностью регистрации и определения пространственного положения позиционирующей головки относительно объекта воздействия, а целеуказатели выполнены с возможностью обеспечения точного измерения их положения и размещены на объекте воздействия и/или объектах, расположенных в фиксированном положении и постоянно связанных с объектом воздействия, и на позиционирующей головке и/или приспособлениях, связанных с ней.
Позиционирующий блок может быть выполнен в виде робота или станка.
Регистрирующее устройство может содержать электрооптическое регистрирующее устройство, которое может быть выполнено в виде системы трехмерного технического зрения или лазерного следящего устройства. Регистрирующее устройство также может содержать многоголовочную интерферометрическую систему.
По меньшей мере одно электрооптическое регистрирующее устройство может быть расположено вблизи позиционирующего блока для обеспечения возможности регистрирования измерительной системой пространственного положения позиционирующего блока и объекта воздействия посредством триангуляции.
Позиционирующее устройство может быть снабжено соединенным с блоком управления позиционированием позиционирующего блока устройством идентификации объекта.
Регистрирующее устройство может быть выполнено с возможностью обеспечения одновременной регистрации положения в пространстве позиционирующей головки и объекта воздействия.
Отличительной особенностью настоящего изобретения является управление позиционирующей головкой относительно объекта воздействия, которое достигается с помощью основной измерительной системы определения местоположения, являющейся частью изобретения, которая обеспечивает определение пространственных координат целевых точек с чрезвычайно высокой точностью и которая может рассчитать пространственное положение других механических элементов, присоединенных к жесткому телу, снабженному целевыми точками.
Управляющая информационная система в настоящем изобретении может определять смещения между действительным положением позиционирующей головки и ее заданным положением, чтобы корректировать управляющую программу, а также управлять позиционирующей головкой, чтобы скомпенсировать такие смещения.
Регистрирующие устройства предусмотрены для того, чтобы определять относительное положение позиционирующей головки и объекта воздействия, причем эти регистрирующие устройства могут, например, использовать фотограмметрию и/или технику трехмерного технического зрения, чтобы калибровать положение позиционирующей головки.
Изобретение может обеспечивать управление роботом такого типа, как описанный в заявке на патент Швеции N 8502327-3, в соответствии с предложенным способом и с помощью предложенного устройства.
Изобретение будет описано более детально со ссылкой на сопровождающие чертежи, где
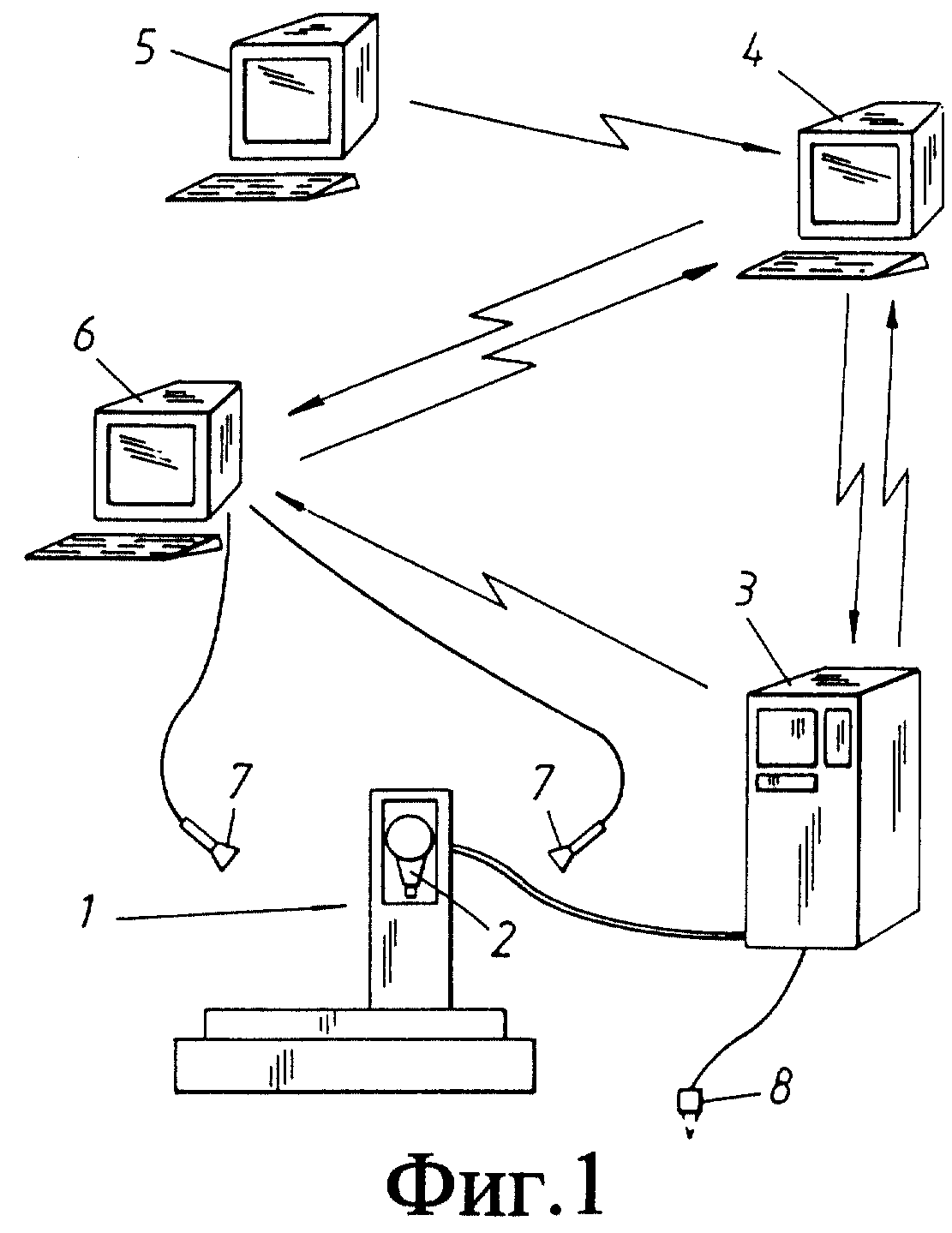
фиг. 1 показывает производственную позиционирующую систему согласно настоящему изобретению;
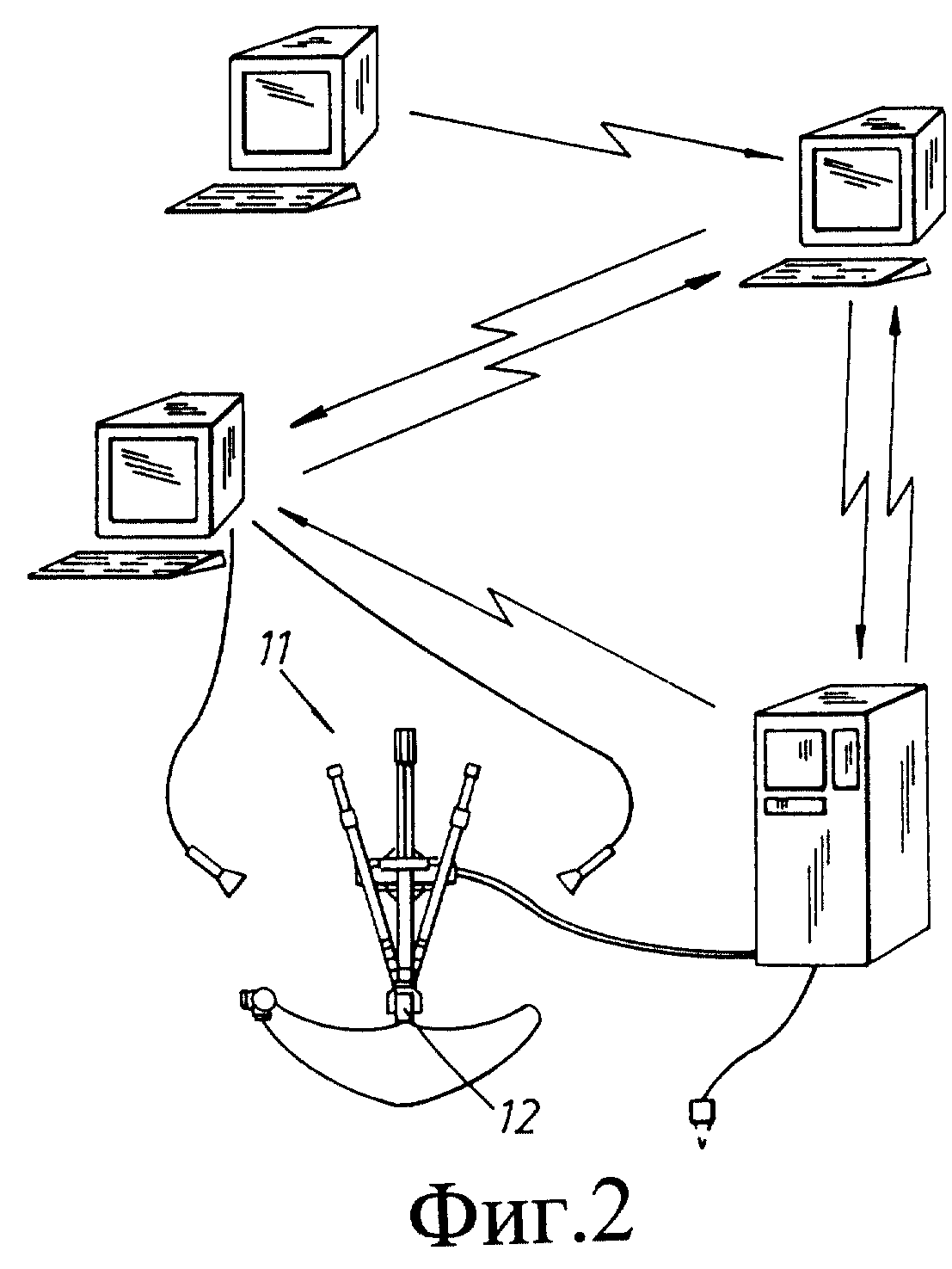
фиг. 2
показывает производственную позиционирующую систему согласно настоящему изобретению, предназначенную для робота;
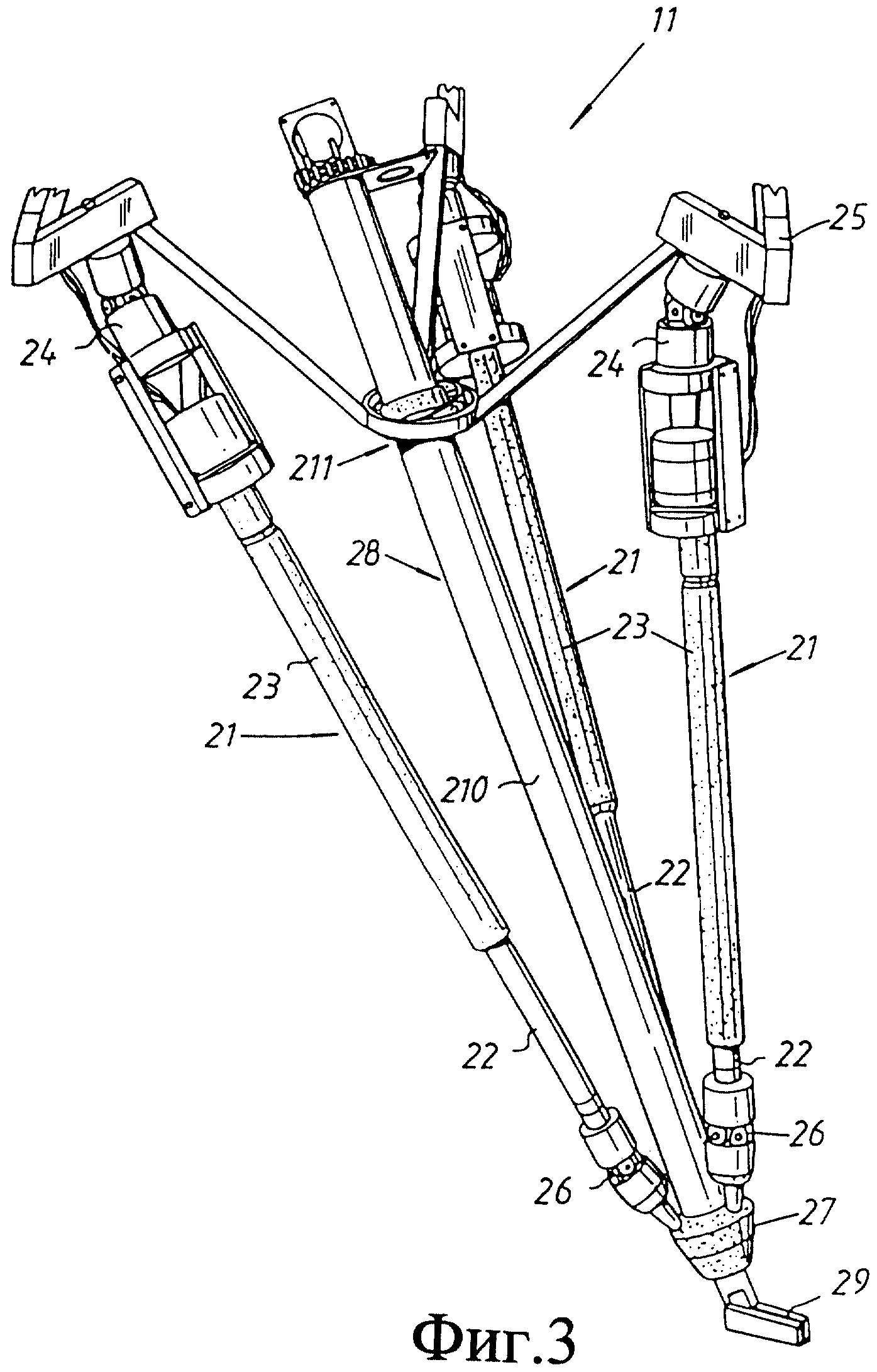
фиг. 3 показывает аксонометрический вид робота согласно
фиг.2.
Позиционирующее устройство содержит позиционирующий блок 1, снабженный позиционирующей головкой 2, причем упомянутые позиционирующий блок и головка устроены так, чтобы ими можно было неоднократно управлять с помощью блока 3 управления позиционированием для приведения в выбранное положение в заданном рабочем объеме. Позиционирующее устройство также содержит управляющую информационную систему 4 для связи с блоком 3 управления позиционированием. Между управляющей информационной системой 4 и блоком 3 управления позиционированием существует двусторонняя связь, как показано на фиг. 1 стрелками в двух направлениях.
Позиционирующий блок 1, позиционирующая головка 2, блок 3 управления позиционированием и управляющая информационная система 4 известным способом образуют обычный станок с числовым программным управлением или обычного промышленного робота.
Позиционирующее устройство согласно варианту осуществления изобретения, показанному на фиг. 1, снабжено также системой 5 автоматического проектирования, которая может непосредственно передавать управляющие данные управляющей информационной системе 4. Управляющая информационная система 4 может получать управляющие данные в качестве входных данных и многими другими путями, а не только от системы автоматизированного проектирования, как показано здесь.
Измерительная система трехмерного определения местоположения соединена с управляющей информационной системой 4 двусторонней связью; под этим понимается, что система способна регистрировать измеренные точки в регистрирующем устройстве и затем, обрабатывая регистрируемые данные, определять пространственные координаты точек. Измерительная система определения местоположения используется вследствие ее способности регистрировать и определять положение измеренной точки в пространстве. Измерительная система требует наличия целеуказателей, помещенных на объекте воздействия и/или в фиксированной точке или около нее вблизи позиционирующей головки 2, положение которых может быть точно измерено. Могут быть использованы целеуказатели любого типа, положение которых может быть определено электрооптическим устройством. Целеуказатели могут, например, быть отражающими поверхностями-мишенями, светодиодами, призмами, апертурами приборов, сферами и т.д. С помощью этих целеуказателей измерительная система определения местоположения может регистрировать и рассчитывать пространственные координаты целеуказателей в заданном рабочем объеме, для того чтобы передать эту информацию управляющей информационной системе 4, которая, в свою очередь, связывается с блоком 3 управления позиционированием для управления позиционирующей головкой 2.
Одно или несколько регистрирующих устройств 7 присоединены к измерительной системе 6 определения местоположения для позиционного определения пространственных координат целеуказателей. Эти регистрирующие устройства 7 могут содержать электрооптические устройства, которые непосредственно присоединены к измерительной системе определения местоположения для дальнейшего расчета пространственных координат. Регистрирующие устройства 7 регистрируют положение целеуказателей через определенные заранее заданные промежутки времени, чтобы дать возможность выполнить указанные расчеты. Измерительная система 6 определения местоположения или управляющая информационная система 4 могут также вычислять разность между двумя последовательными записями и позиционными положениями и, с помощью блока 3 управления позиционированием, регулировать положение позиционирующей головки 2 на величину этой разности. Это означает, что любое изменение положения объекта воздействия по отношению к положению позиционирующей головки 2, например, из-за изменения температуры, корректируется позиционирующим устройством в реальном времени, т.е. во время работы.
В варианте изобретения, показанном на фиг. 1, устройство 8 идентификации объекта присоединено к блоку 3 управления позиционированием, для того чтобы непосредственно следить за поверхностью объекта воздействия, прежде чем позиционирующая головка 2 придет в это положение, и регулировать позиционирующую головку 2 непосредственно через блок 3 управления позиционированием для любых отклонений положения этой поверхности. Устройство 8 идентификации объекта является, таким образом, дополнительным средством регулировки в системе.
Измерительная система 6 определения местоположения является электрооптической системой, служащей для определения относительного положения позиционирующей головки 2 относительно обрабатываемой детали или какой-либо другой опорной координатной системы.
Позиционирующее устройство также образует управляющую систему, которая обеспечивает корректировки пути перемещения позиционирующего блока и его позиционирующей головки и/или непосредственно рассчитывает скорректированные положения на основе требуемых положений и наблюдаемых положений.
Способ позиционирования согласно настоящему изобретению может быть описан следующими шагами.
Шаг 1: Целеуказатели прикрепляются к объекту воздействия и/или элементу, который остается в фиксированном пространственном положении относительно объекта воздействия.
Шаг 2: Пространственные координаты этих целеуказателей определяются с помощью какого-либо регистрирующего устройства. Это устройство может содержать такое же электрооптическое устройство, как описанное выше, или какое-либо другое измерительное устройство, такое как координатное измерительное устройство, теодолит, лазерное следящее устройство и т.д.
Шаг 3: Целеуказатели прикрепляются к телам, которые нужно позиционировать, и/или к переходным приспособлениям, имеющим фиксированное расположение по отношению к телу, которое нужно позиционировать. Для операции сверления, например, целеуказатели могут крепиться на шпинделе сверлильного устройства или на переходных приспособлениях, имеющих фиксированное расположение по отношению к держателю шпинделя.
Шаг 4: Взаимное расположение целеуказателей на телах, которые нужно позиционировать, например, на конце шпинделя сверлильного устройства или на держателе, определяется либо внешним измерительным устройством, либо посредством использования электрооптической системы, описанной выше, с помощью специальных процедур.
Шаг 5: Электрооптическое устройство, например система трехмерного технического зрения, как в представленном варианте, использует целеуказатели, закрепленные в соответствии с шагами 1 и 3, чтобы определить пространственное положение позиционирующей головки 2 в некоторой координатной системе. Возможны, однако, и другие устройства. Эта координатная система может быть координатной системой рабочего отсека, координатной системой, связанной с крепежным приспособлением, координатной системой, связанной с объектом, т.е. с объектом воздействия, по отношению к которому поэиционирующая система должна быть установлена, или какой-либо другой координатной системой.
Шаг 6:
Процедура
1: Шаг 5 выполняется для множества положений и корректировки рассчитываются в виде средней разности между положениями позиционирующей головки 2, т.
е. ожидаемыми роботом положениями и измеренными
положениями. Корректировки используют, чтобы управлять позиционирующей головкой 2 в рабочем объеме, определенном этими положениями, но не
ограничиваются ими для регулировки пространственных положений.
Для этой цели программа управления роботом и/или станком может быть скорректирована и корректировочные значения могут быть посланы
роботу и/или станку.
Процедура 2: Позиционирующей головкой управляют до достижения ею точного положения путем использования петли обратной связи, в которой электрооптическая система производит измерения в реальном времени, как описано выше, для того чтобы управлять позиционирующей головкой 2.
Таким образом выполняется регистрация, определение положения и корректировка, т.е. за определением координат следует корректировка положения позиционирующей головки 2 и объекта воздействия в пространстве.
Измерительная система 6 определения местоположения, описанная выше, может быть многоголовочной интерферометрической системой, которая установлена в фиксированное положение и которая позиционирует рабочую головку или, как описано ранее, позиционирующую головку 2.
Конкретный вариант осуществления настоящего изобретения показан на фиг. 2, где позиционирующий блок представляет собой робота 11 такого типа, как описанный в вышеуказанной заявке на патент Швеции N 8502327-3. Позиционирующее устройство и способ позиционирования идентичны описанным выше. Робот 11, показанный на фиг. 2, со своей позиционирующей головкой 12 в сочетании с настоящим изобретением образует высокоточную систему управления роботом.
Робот 11 (см. фиг. 3), использованный в качестве позиционирующего блока, содержит три привода 21, каждый из которых представляет собой поршень 22, который перемещается в цилиндре 23. Поршень 22 перемещается внутри цилиндра 23 обычными средствами привода, не показанными здесь, которые могут быть гидравлическими или пневматическими, или могут быть винтовым механизмом или гидравлической жидкостью. Конец каждого цилиндра скреплен с неподвижным основанием или рамой 25 посредством шарнира 24. Шарнир 24, позволяющий цилиндру 23 и поршню 22 поворачиваться во всех направлениях по отношению к раме 25, показан здесь как карданный шарнир, но может быть любым подходящим универсальным шарниром. Каждый поршень 22 соединен посредством подобного шарнира 26 с позиционирующей головкой 27 робота. Приводы 21 расположены вдоль боковых ребер воображаемой треугольной пирамиды и, посредством перемещения поршней 22 в соответствующих цилиндрах 23, позиционирующая головка 27 робота устанавливается в желаемое положение, так как эффективная длина привода 21 однозначно определяет положение позиционирующей головки 27 робота. Робот включает вышеупомянутый блок 3 управления позиционированием, который выдает сигналы приводам 21, которые заставляют позиционирующую головку робота перемещаться в требуемое положение.
Кронштейн 28, состоящий из трубки 210 и вала (не показан), установленного на подшипниках в трубке 210, проходит симметрично от позиционирующей головки 27 робота между приводами 21. Трубка 210 жестко присоединена к позиционирующей головке 27 робота и содержит два подшипника, расположенных по одному на каждом из концов трубки, причем вал внутри трубки может поворачиваться в подшипниках. Универсальный шарнир 211 прикреплен к раме 25 в области, расположенной на оси симметрии воображаемой пирамиды. Универсальный шарнир 211 имеет центральное отверстие, поперечное сечение которого несколько больше, чем наружный диаметр трубки 210. Трубка 210 проходит через центральное отверстие шарнира и может смещаться в осевом направлении по отношению к раме 25 и шарниру 24, в то же самое время она может быть установлена под выбранным углом по отношению к раме 25; таким образом, трубкой 210 управляют в радиальном направлении и она удерживается от поворота в шарнире 24. Трубка 210 достаточно длинная для того, чтобы всегда находиться в центральном отверстии универсального шарнира 211 во всем диапазоне движения позиционирующей головки 27 робота.
Трубка 210 снабжена вращающим двигателем, здесь не показанным, вращательное движение которого через подходящую передачу обеспечивает требуемое вращательное движение вала.
Конец вала, выходящий наружу через позиционирующую головку 27 робота, служит опорой подходящему манипуляционному устройству, которое может быть захватным устройством 29, управляемым двигателем. Захватным движением этого устройства можно управлять с помощью рабочих стержней, аксиально установленных внутри трубки 210 с возможностью вращения и присоединенных к подходящим управляющим средствам.
На фиг. 3 кронштейн 28 между приводами 21 содержит узел, состоящий из вала и трубки. Однако, он может также состоять только из вала, укрепленного с возможностью вращения в универсальном шарнире 211 и в позиционирующей головке 27 робота. Количество приводов может быть более трех, показанных на чертежах. Они также не обязательно симметрично расположены вокруг кронштейна 28. Также вал может быть выполнен с возможностью перемещения в трубке 210.
Реферат
Изобретения могут быть использованы при управлении производственными установками, например, промышленными роботами или станками. Для позиционирования позиционирующей головки относительно объекта воздействия используют позиционирующее устройство с позиционирующим блоком, блоком управления позиционированием позиционирующего блока, управляющей информационной системой блока управления и целеуказателями. Регистрацию и определение положения позиционирующей головки производят с помощью измерительной системы трехмерного определения местоположения, содержащей, по меньшей мере, одно регистрирующее устройство для определения и регулировки положения позиционирующей головки в пространстве. Целеуказатели, которые обеспечивают точное измерение их положения, размещают на объекте воздействия и/или на объектах, связанных с ним, а также на позиционирующей головке и/или приспособлениях, связанных с ней. Регистрирующее устройство может содержать электрооптическое регистрирующее устройство в виде системы трехмерного технического зрения или лазерного следящего устройства. В результате обеспечивается повышение точности позиционирования. 2 с. и 8 з.п. ф-лы, 3 ил.
Формула
7. Позиционирующее устройство по п.5 или 6, отличающееся тем, что регистрирующее устройство содержит многоголовочную интерферометрическую систему.
Комментарии