Роботизированная система и способ работы роботизированной системы - RU2710411C2
Код документа: RU2710411C2
Чертежи









Описание
Настоящее изобретение относится к роботизированной системе для выполнения множества операций во время сборки или технического обслуживания летательного аппарата или космического корабля, содержащей робота, выполненного с возможностью расположения вблизи фюзеляжа летательного аппарата или космического корабля и содержащего часть основания, подвижную роботизированную руку, соединенную, в одном конце, с частью основания, а в противоположном конце содержащую первую соединительную часть, и первое средство управления, выполненное с возможностью управления роботизированной рукой.
Роботизированные системы, содержащие одного или более роботов, широко используются в разных областях техники, чтобы выполнять работу, которая не может эффективно выполняться людьми или выполнение которой людьми невозможно. Для сложных задач, таких как, например, производство летательного аппарата или космического корабля, должно выполняться много разных рабочих операций, так что должен быть предоставлен робот, содержащий множество разных инструментов для выполнения разных рабочих операций или способный перемещаться в производственной среде, чтобы получить соответствующий инструмент, требуемый для конкретной рабочей операции. Тем не менее, в частности, в производственных средах с ограниченным пространством, таких как внутри фюзеляжа летательного аппарата или космического корабля, может не быть достаточно места для большого робота, содержащего множество инструментов или перемещающегося в производственной среде. Кроме того, большие роботы, содержащие множество инструментов, могут быть относительно негибкими в отношении приспособления к разным рабочим операциям, и, в средах с ограниченным пространством, большие роботы, перемещающиеся в производственной среде, могут создавать опасность живым техникам, работающим рядом с роботом.
Тем не менее, очень желательно также использовать роботизированные системы в таких средах, так как в противном случае, в таких областях, как производство воздушных судов или космических кораблей, требующих высококвалифицированных техников, эти техники также должны выполнять много простых задач, таких как, например, выходить из фюзеляжа и возвращаться в него, чтобы взять или вернуть на место требуемый инструмент, искать и получать подходящий материал или подготавливать поверхности для последующего этапа обработки, а также много неэргономических задач, таких как, например, работа над головой тяжелыми инструментами или других задач, требующих эргономически неблагоприятного положения тела, такого как согнутое положение или положение на коленях, в частности, при работе в областях, к которым сложно получить доступ. Также, сама рабочая среда иногда может быть неудобной из-за, например, очень высоких или очень низких температур, высокой влажности, интенсивного шума и/или вибраций. Одним из примеров является космическая среда, в которой люди работают в условиях, очень отличающихся от земных, и низкая гравитация и защитные костюмы усложняют людям управление движениями тела и их выполнение. Все вышеописанное возлагает на техника высокие требования по выполнению высококвалифицированных задач с требуемой высокой точностью, в частности, когда должен использоваться тяжелый инструмент.
Следовательно, целью настоящего изобретения является предоставление гибкой и относительно недорогой роботизированной системы, которая также может эффективно использоваться в средах с ограниченным пространством.
Эта цель достигается роботизированной системой, обладающей признаками по пункту 1 формулы изобретения. Полезные варианты осуществления роботизированной системы являются предметом зависимых пунктов формулы изобретения.
Согласно настоящему изобретению, предложена роботизированная система для выполнения множества операций во время сборки или технического обслуживания летательного аппарата или космического корабля, в частности, внутри фюзеляжа летательного аппарата или космического корабля. Летательный аппарат может, например, являться самолетом, радиоуправляемым летательным аппаратом или вертолетом, а космический корабль может, например, являться ракетой-носителем, стартовым ускорителем, космическим кораблем, спутником, космической конструкцией или космической станцией, и сборка и техническое обслуживание также включает в себя и связанную логистику.
Роботизированная система содержит первого робота, выполненного с возможностью расположения вблизи фюзеляжа летательного аппарата или космического корабля. Первый робот предпочтительно является промышленным роботом или другим типом робота, имеющим относительно большие размеры. Он может являться подвижным или, предпочтительно, стационарным, так чтобы он мог быть расположен, в частности, в переменном или фиксированном местоположении внутри фюзеляжа летательного аппарата или космического корабля. Первый робот содержит подвижную или стационарную часть основания, подвижную роботизированную руку, в одном конце соединенную с частью основания, а в противоположном конце содержащую первую соединительную часть, и первое средство управления, выполненное с возможностью управления роботизированной рукой и, в частности, ее перемещением. В значении согласно настоящему описанию, расположение первого робота вблизи фюзеляжа означает, что роботизированная рука может достигать фюзеляжа с помощью второго робота, установленного на нее, как более подробно пояснено ниже. Первое средство управления может содержать один или более узлов управления, которые могут принимать форму, например, одного или более узлов обработки, каждый из которых содержит один или более процессоров. Такие узлы обработки могут дополнительно включать в себя память, сохраняющую команды управления, которые должны выполняться одним или более из процессоров, или могут быть выполнены с возможностью приема таких команд управления с внешнего объекта через проводной или беспроводной интерфейс данных.
Роботизированная система дополнительно содержит множество вторых роботов, которые являются подвижными и которые меньше первого робота. Каждый из вторых роботов содержит средство перемещения, которое, предпочтительно, представлено колесами или содержит колеса, и которое обеспечивает соответствующему второму роботу поддержку на поверхности земли и обеспечивает поступательное перемещение второго робота вдоль поверхности земли и вращательное движение относительно оси, перпендикулярной поверхности земли, предпочтительно, относительно центральной оси второго робота. Приводная часть соответствующего второго робота, которая преимущественно может являться электродвигателем, выполнена с возможностью приведения в движение средства перемещения, чтобы осуществлять поступательное перемещение соответствующего второго робота. Опционально или предпочтительно, приводная часть также может быть выполнена с возможностью приведения в движение средства перемещения, чтобы осуществлять вращательное перемещение. Тем не менее, также возможно, что второй робот может совершать вращательное перемещение только пассивно, например, посредством перемещения второго робота, используя внешнее средство, такое как первая соединительная часть, во время соединения первого и второго роботов, как более подробно описано ниже. В последнем случае второй робот может преимущественно содержать средство торможения, которое выполнено с возможностью выборочного предотвращения поступательного перемещения, с тем чтобы, при использовании внешних средств для изменения вращательной ориентации второго робота, его поступательное положение можно было зафиксировать.
Каждый из вторых роботов дополнительно содержит инструментальную часть, содержащую инструмент, выполненный с возможностью выполнения конкретной операции из множества операций. Инструмент может иметь фиксированное положение относительно второго робота, так чтобы инструмент мог перемещаться в другое положение только посредством перемещения всего второго робота, но он также может иметь диапазон перемещения, который, тем не менее, предпочтительно меньше, чем диапазон перемещения роботизированной руки.
Более того, каждый второй робот содержит вторую соединительную часть, которая выполнена с возможностью выборочного и съемного соединения с первой соединительной частью первого робота в предопределенном взаимном расположении, то есть, первая и вторая соединительные части самоцентрируются во время их соединения.
Каждый второй робот также содержит второе средство управления, выполненное с возможностью управления соответствующим вторым роботом. В частности, второе средство управления предпочтительно выполнено с возможностью управлять приводной частью или как приводной частью, так и инструментальной частью соответствующего второго робота, при этом, для каждого второго робота, второе средство управления которого выполнено с возможностью управлять как приводной частью, так и инструментальной частью, второе средство управления выполнено с возможностью управлять инструментальной частью для выполнения конкретной операции в выбранном местоположении. Примером второго робота, в котором инструментальная часть не управляется вторым средством управления, является второй робот, содержащий инструментальную часть с чисто пассивным транспортным инструментом, таким как транспортный контейнер, в котором может быть размещен инструмент или материал для использования техником, чтобы транспортировать его к технику. Второе средство управления также может содержать один или более узлов управления, которые могут принимать форму, например, одного или более узлов обработки, каждый из которых содержит один или более процессоров. Такие узлы обработки могут дополнительно включать в себя память, сохраняющую команды управления, которые должны выполняться одним или более из процессоров, или могут быть выполнены с возможностью приема таких команд управления с внешнего объекта через проводной или беспроводной интерфейс данных.
Для каждой операции из множества операций, множество вторых роботов включает в себя по меньшей мере одного второго робота, инструмент которого выполнен с возможностью выполнения соответствующей операции.
Первое средство управления и второе средство управления каждого из вторых роботов выполнены с возможностью управлять приводной частью соответствующих вторых роботов и роботизированной рукой, чтобы выборочно соединять первую соединительную часть и соответствующую вторую соединительную часть в предопределенном взаимном расположении, после этого, роботизированной рукой, чтобы перемещать инструментальную часть вместе со вторым роботом, поддерживаемым роботизированной рукой, в выбранное местоположение, в котором должна быть выполнена конкретная операция, для которой приспособлена инструментальная часть соответствующего второго робота, и, затем, вторым роботом, чтобы выполнять конкретную операцию в выбранном местоположении. Это, предпочтительно, выполняется, в то время как второй робот поддерживается роботизированной рукой, то есть, в то время как первая и вторая соединительные части соединены друг с другом в предопределенном взаимном расположении. Тем не менее, дополнительно или в качестве альтернативы, также возможно, чтобы вторые роботы или по меньшей мере некоторые из вторых роботов содержали средство закрепления, которое выполнено с возможностью выборочного и съемного закрепления соответствующего второго робота на выбранном участке поверхности летательного аппарата или космического корабля, например, на внутренней поверхности фюзеляжа летательного аппарата или космического корабля. В последнем варианте осуществления, в котором средство закрепления может содержать, например, всасывающее средство, соответствующий второй робот может быть перемещен роботизированной рукой на выбранный участок поверхности, чтобы затем его приводят в действие, чтобы закрепить его на участке поверхности посредством средства закрепления, чтобы впоследствии снять его с роботизированной руки посредством разъединения первой и второй соединительных частей, и чтобы, наконец, его приводят в действие, чтобы он выполнял конкретную операцию независимо от и отдельно от первого робота, который, тем временем, может взаимодействовать с одним или более из других вторых роботов образом, описанным выше. После выполнения конкретной операции, второй робот может вновь соединяться с роботизированной рукой посредством повторного соединения первой и второй соединительных частей, затем средство закрепления может освобождаться, и после этого второй робот может быть перемещен роботизированной рукой на землю или на другой выбранный участок поверхности, где должна быть выполнена конкретная операция.
Таким образом, первый робот и соответствующий второй робот преимущественно взаимодействуют синергетически, чтобы выполнять конкретную операцию, при этом преимущества первого робота, такие как высокая точность, большие силы и большой диапазон перемещения, объединяются с преимуществами вторых роботов, таких как специализированное предназначение для выполнения конкретной операции посредством обеспечения специализированным инструментом. В целом, добавить к системе новых вторых роботов, приспособленных для конкретной операции, очень просто и относительно недорого.
Дополнительно, преимущественно, возможно и предпочтительно производить вторых роботов в виде относительно недорогих роботов по сравнению с первым роботом, которые вторые роботы, тем не менее, составляют специализированные компоненты системы, в частности, приспособленные для конкретной операции. В частности, до тех пор, пока вторые роботы могут выполнять свою конкретную операцию с достаточной точностью, в то время как их поддерживают роботизированной рукой или размещают в конкретном местоположении роботизированной рукой и закрепляют там, вторые роботы могут иметь по существу более низкую точность относительно расположения вторых роботов, чем точность, достижимая роботизированной рукой. Другими словами, инструмент второго робота может располагаться более точно, если второй робот поддерживается и перемещается роботизированной рукой, чем посредством перемещения самого второго робота, используя его средство перемещения, приводную часть и первое средство управления. Эффективность вторых роботов может быть ограничена, например, низким разрешением датчиков, таких как датчики положения, в качестве которых могут использоваться недорогие ультразвуковые датчики, имеющие, например, разрешение от 0.5 до ±5 см, разрешение от ±0.7 до ±3 см, разрешение от ±0.8 до ±2 см и, например, разрешение ±1 см, или небольшим размером, например, с высотой всего около 0.5 м. Фактически, возможно даже выбрать такую недорогую и простую конструкцию для вторых роботов, чтобы сами по себе они не могли использоваться для выполнения конкретных операций. В предпочтительном варианте осуществления, размер вторых роботов является таким, что они могут перемещаться через квадратное отверстие, имеющее размер 0.5 м x 0.5 м.
Напротив, первый робот может являться дорогим и относительно негибким высокоэффективным роботом, таким как автоматический робот, чтобы компенсировать недостатки эффективности вторых роботов, тем не менее, поддерживая общую стоимость роботизированной системы низкой. Например, первый робот может иметь высокую точность, например, повторяемость позиционирования от ±0.02 до ±0.1 мм, более предпочтительно, повторяемость позиционирования от ±0.03 до ±0.07 мм, еще более предпочтительно, повторяемость позиционирования от ±0.04 до ±0.06 мм, и, например, повторяемость позиционирования ±0.05 мм, большой диапазон перемещения и/или высокую грузоподъемность. В предпочтительном варианте осуществления, максимальный радиус диапазона перемещения роботизированной руки составляет от 1 до 2 м, предпочтительно, 2 м. Дополнительно, использование первого робота большого размера внутри ограниченной производственной среды становится возможным, так как первому роботу по существу не нужно перемещаться, так что рабочий диапазон может быть ограничен диапазоном перемещения роботизированной руки, который, в свою очередь, может быть ограничен безопасным диапазоном посредством, например, легкого барьерного устройства, тем самым ограничивая опасности, угрожающие техникам. Напротив, вторые роботы могут быть выбраны относительно маленькими и маломощными, с тем чтобы они подобным образом не представляли угрозы для техников, даже если они перемещаются в производственной среде.
В результате, комбинация первых и вторых роботов позволяет гибко выполнять множество конкретных операций с высокой точностью и большим диапазоном перемещения с минимальным количеством дорогих и опасных высокоэффективных роботов, тем самым позволяя техникам концентрироваться только на задачах, требующих высокой квалификации. Благодаря назначению конкретных операций специализированным вторым роботам, функционирование роботизированной системы является очень эффективным, хотя роботизированная система является недорогой и простой. Также преимущественно недорого заменить второго робота в случае неисправности, или дать команду другому второму роботу или технику подменить, по меньшей мере временно, второго робота, имеющего неисправность. Таким образом, система может эффективно взаимодействовать и живыми техниками и помогать им таким образом, чтобы вся работа распределялась простым образом посредством назначения специализированных задач «подсистеме» (включающей в себя живых техников) или типу «подсистемы», которая способна выполнить назначенную задачу наилучшим и наиболее эффективным образом с самыми низкими издержками. Другими словами, вся система может включать в себя три типа «подсистем», а именно (1) множество недорогих вторых роботов, (2) минимальное количество высокоэффективных первых роботов, и (3) высококвалифицированные техники, которым назначаются разные задачи для достижения высокой степени эффективности. В этом отношении, возможно предусмотреть общую систему или узел управления, который приспособлен и выполнен с возможностью поддержания статуса задач, которые должны быть выполнены, и для назначения задач вторым роботам, или первым и вторым роботам, и, предпочтительно, также техникам.
Более того, благодаря тому, что вторые роботы преимущественно имеют небольшой размер и небольшой вес, техник может вручную поднять второго робота. Это полезно, поскольку в случае, когда второй робот, поддерживаемый роботизированной рукой, не должен выполнять с достаточной точностью, или вообще не должен выполнять конкретную операцию, для которой приспособлена инструментальная часть второго робота, в выбранном местоположении, из-за, например, проблем с синхронизацией или со связью между первым роботом и вторым роботом, ошибки в соединении между первым роботом и вторым роботом, приводящей к относительному смещению, или ситуации со сложным доступом в выбранном местоположении, техник, поддерживающий второго робота, может хорошо выполнить или завершить операцию. Это также применимо в случаях, в которых конкретная операция включает в себя множество подзадач, и второй робот может выполнить только некоторые из подзадач, в то время как его поддерживает роботизированная рука. Техник, поддерживающий второго робота, может затем завершить недостающие подзадачи. Таким образом, преимущественно возможно временно или постоянно гибко заменять компонент системы другим компонентом системы или техником для достижения высокой эффективности.
Кроме того, роботизированная система согласно настоящему изобретению преимущественно применима к космическим приложениям, так как она избегает высоких издержек, связанных с транспортировкой разных типов специализированных тяжелых роботов на орбиту в космос и организацией использования традиционных роботизированных систем, являющихся непрактичными для космических приложений. В этом отношении, некоторые космические конструкции, такие как космические станции, уже содержат встроенную роботизированную руку, которая может использоваться в качестве роботизированной руки первого робота. Доставка по требованию небольших специализированных вторых роботов позволяет радикально снизить общие издержки и общие трудозатраты.
Более того, система может содержать один или более портативных остановочных элементов, которые могут размещаться техником на пути перемещения второго робота по направлению к первому роботу для соединения и для выполнения конкретной операции в выбранном местоположении. Каждый из вторых роботов предпочтительно выполнен с возможностью детектировать такой остановочный элемент, когда он находится в определенном диапазоне от остановочного элемента. Например, остановочный элемент может передавать определенный беспроводной сигнал, который может быть детектирован соответствующим датчиком или приемником, обеспеченном на каждом втором роботе, или остановочные элементы могут просто являться предопределенными объектами, такими как пластинчатые объекты, которые могут быть детектированы датчиком расстояния, обеспеченном на вторых роботах. В последнем случае, второе средство управления выполнено с возможностью останавливать перемещение второго робота при детектировании предопределенного объекта, и, предпочтительно, при детектировании предопределенного объекта в пределах определенного максимального расстояния. Таким образом, остановочные элементы могут являться предопределенными объектами, как подробно описано ниже, для остановки перемещения второго робота в определенном положении относительно роботизированной руки с целью соединения. Таким образом, техник может вручную корректировать запрограммированное или указанное функционирование второго робота для выполнения соответствующей конкретной операции в соответствующем выбранном местоположении. Это увеличивает преимущества, обеспечиваемые роботизированной системой, в отношении безопасности при работе в производственной среде, в которой техники работают одновременно вместе с роботизированной системой.
В предпочтительном варианте осуществления, первое средство управления дополнительно выполнено с возможностью управления первой соединительной частью. В качестве альтернативы или дополнительно, второе средство управления вторых роботов дополнительно выполнено с возможностью управления соответствующей второй соединительной частью. Тем не менее, предпочтительно, если первое и второе соединительные средства являются настолько пассивными, насколько возможно, так чтобы их предпочтительно можно было соединить посредством простого перемещения первого и второго соединительных средств относительно друг друга в конкретное положение зацепления. В данном случае, может обеспечиваться или не обеспечиваться, чтобы первое и/или второе средство управления было выполнено с возможностью выборочного управления фиксирующим средством на первой и/или второй соединительной части, чтобы с возможностью освобождения зафиксировать первую и вторую соединительные части в предопределенном взаимном расположении.
В предпочтительном варианте осуществления, роботизированная система дополнительно содержит главный узел управления, выполненный с возможностью осуществления связи с первым средством управления и/или вторым средством управления через проводное или беспроводное соединение связи, и для предоставления команд управления или команд программирования первому средству управления и второму средству управления, соответственно. Такой главный узел управления предпочтительно расположен отдельно и удаленно от первых и вторых роботов и может, посредством передачи команд управления или команд программирования, управлять всем функционированием роботизированной системы централизованным образом.
В предпочтительном варианте осуществления, первое и второе средства управления сконфигурированы таким образом, что, при соединении первой соединительной части со второй соединительной частью одного из вторых роботов, первое средство управления сопрягается с соответствующим вторым средством управления, чтобы установить соединение связи, например, посредством интерфейсов связи, как упоминалось выше, и второе средство управления предоставляет команды управления или команды программирования для управления движением роботизированной руки, которые хранятся во втором средстве управления, первому средству управления через соединение связи. В частности, передача команд управления или команд программирования может осуществляться автоматически после установления соединения связи. Данный вариант осуществления может быть объединен с предыдущим вариантом осуществления, содержащим центральный узел управления, но предпочтительно, если такой центральный узел управления отсутствует. Затем, вторые роботы осуществляют децентрализованное управление роботизированной системой, так что каждый второй робот гибко приспосабливает управление первым роботом и роботизированной рукой к своим требованиям во время периода времени взаимодействия с первым роботом. Это также полезно тем, что, при добавлении новых вторых роботов, выполненных с возможностью выполнения новой конкретной операции, нет необходимости изменять первого робота или центральный узел управления.
В предпочтительном варианте осуществления, приводная часть, вторая соединительная часть и инструментальная часть каждого из вторых роботов являются модульными узлами, которые являются выборочно и независимо заменяемыми. Это не только обеспечивает снижение стоимости вторых роботов благодаря возможности использовать общую базовую конструкцию, но также позволяет гибко приспосабливать вторых роботов к новым или измененным конкретным операциям или обновлять вторых роботов очень простым образом.
В предпочтительном варианте осуществления, который предпочтительно может быть объединен с предыдущим вариантом осуществления, включающим в себя модульные узлы, каждый второй робот дополнительно содержит три уровня, расположенных друг на друге, с приводной частью, второй соединительной частью и инструментальной частью, расположенных на соответствующих разных уровнях. Предпочтительно, приводная часть расположена на самом нижнем из трех уровней, вторая соединительная часть расположена на среднем из трех уровней, а инструментальная часть расположена на самом верхнем из трех уровней. В данном варианте осуществления, который предусматривает, в частности, простую конструкцию и способствует модульности, обновляемости и изменяемости, каждый из трех уровней определен опорной плитой, на которую, соответственно, установлена приводная часть, вторая соединительная часть и инструментальная часть, соответственно.
В предпочтительном варианте осуществления, инструментальная часть по меньшей мере некоторых из вторых роботов является 3D-принтером, инструментом для анализа, измерения или наблюдения, транспортным инструментом, инструментом для проверки и ремонта, нагревательным устройством, окрашивающим или покрывающим устройством, или винтовертом или другим крепежным инструментом. Транспортный инструмент может включать в себя, например, средство захвата и/или контейнер. Независимо от точной природы инструментальных частей разных вторых роботов, в целом, предпочтительно, если множество вторых роботов включает в себя по меньшей мере одного второго робота первой категории, выполненного с возможностью выполнения конкретной операции, вовлекающей модификацию летательного аппарата или космического корабля, по меньшей мере одного второго робота второй категории, выполненного с возможностью выполнения конкретной операции, вовлекающей наблюдение, измерение или анализ результатов конкретной операции, выполняемой одним из вторых роботов первой категории, и, предпочтительно, также по меньшей мере одного второго робота третьей категории, выполненного с возможностью выполнения конкретной операции, вовлекающей транспортировку конкретного типа инструмента для использования техником для переделки или исправления результата конкретной операции, выполняемой одним из вторых роботов первой категории или наблюдаемой, измеряемой или анализируемой вторым роботом второй категории. В частности, инструментальные части и инструменты вторых роботов трех категорий выполнены с возможностью выполнения соответствующей конкретной операции. Например, инструментальной части вторых роботов первой категории могут являться 3D-принтером, нагревательным устройством, окрашивающим или покрывающим устройством, ремонтным инструментом, или винтовертом или другим крепежным инструментом, инструментальной части вторых роботов второй категории могут являться инструментом для анализа, измерения или наблюдения, а инструментальной части вторых роботов третьей категории могут являться транспортным инструментом. Результаты наблюдения, измерения или анализа, выполненного вторым роботом второй категории, могут отображаться или обозначаться соответствующим вторым роботом второй категории, с тем чтобы техник мог запрашивать у второго робота третьей категории находить и приносить подходящий инструмент для переделки или исправления. В качестве альтернативы, результаты наблюдения, измерения или анализа, выполненного вторым роботом второй категории, могут передаваться на удаленный узел управления, например, беспроводным образом или посредством перемещения и физического сопряжения второго робота второй категории с удаленным узлом управления, который выполнен с возможностью анализировать результаты и автоматически определять необходимость переделки или исправления и определять подходящий инструмент, который должен быть использован, и командовать второму роботу третьей категории находить и приносить подходящий инструмент для переделки или исправления технику. Конечно, также возможно, чтобы результаты просто передавались таким образом на удаленное устройство отображения и отображались или обозначались там для анализа живым оператором, который затем может принимать решения о возможных этапах, которые необходимо предпринять. В случае удаленного узла управления или удаленного устройства отображения, результаты наблюдений, измерений или анализа, выполненного вторыми роботам второй категории, могут, предпочтительно, сохраняться в базе данных для документирования и последующего оценивания.
В целом, первая и вторая соединительные части могут включать в себя разные средства для осуществления соединения, например, механические, пневматические и/или электрические средства. В случае пневматических или электрических средств, предпочтительно обеспечивать защиту от перебоев в питании, так, чтобы соединение сохранялось после потери пневматической или электроэнергии.
Тем не менее, в предпочтительном варианте осуществления, первая соединительная часть содержит вытянутый прямой соединительный элемент, который может, например, являться прямой балкой и может иметь, например, прямоугольное поперечное сечение. Соединительный элемент имеет первую продольную ось и проходит от роботизированной руки так, что соединительный элемент является выборочно перемещаемым посредством роботизированной руки в первом направлении, которое может являться горизонтальным направлением, вдоль первой продольной оси, и по меньшей мере во втором направлении, которое перпендикулярно первой продольной оси и является направленным вертикально вверх направлением, когда первая продольная ось ориентирована горизонтально.
Соединительный элемент содержит первую поверхность примыкания, проходящую вдоль первой продольной оси. Она может являться, например, верхней прямой продольной кромкой соединительного элемента, например, в случае, если соединительный элемент имеет прямоугольное поперечное сечение. Соединительный элемент дополнительно содержит по меньшей мере одну вторую поверхность примыкания, направленную от роботизированной руки, предпочтительно, вдоль первой продольной оси, и две разнесенные третьи поверхности примыкания, ориентированные во втором направлении, то есть, вверх, когда второе направление является вертикальным направлением, и расположенные на противоположных сторонах соединительного элемента относительно первой продольной оси.
Первая соединительная часть также содержит первое фиксирующее средство.
Вторая соединительная часть содержит две разнесенные первые граничные поверхности, которые, как будет пояснено ниже, служат в качестве направляющих поверхностей для соединительного элемента. Первые граничные поверхности, которые могут являться частями в целом U-образной поверхности, ориентированы и направлены противоположно друг другу в первой плоскости, которая ориентирована горизонтально, когда соответствующий второй робот поддерживается средством перемещения на горизонтальной поверхности земли. Они определяют между собой первое пространство вставки, которое имеет такой размер, что соединительный элемент может быть по меньшей мере частично вставлен в первое пространство вставки через отверстие между двумя концами первых граничных поверхностей посредством перемещения соединительного элемента в первой плоскости вдоль продольной оси соединительного элемента. Первое пространство вставки содержит первую секцию, проходящую от отверстия, и вторую секцию, отделенную от отверстия посредством первой секции. Эта первая секция сужается от отверстия в направлении второй секции, то есть, определяется посредством частей и между частями первых граничных поверхностей, ориентированных под углом относительно друг друга.
Вторая соединительная часть также содержит две предпочтительно плоские вторые граничные поверхности, которые подобным образом служат в качестве направляющих поверхностей для соединительного элемента, и которые расположены под углом относительно друг друга, например, в V-образной конфигурации. Вторые граничные поверхности направлены по меньшей мере ко второй секции первого пространства вставки, так что они определяют, сверху от первого пространства вставки, сужающееся второе пространство вставки, в которое по меньшей мере частично является вставляемым соединительный элемент посредством перемещения соединительного элемента после того, как он был по меньшей мере частично вставлен во вторую секцию первого пространства вставки, во втором направлении, перпендикулярном первой плоскости. Более конкретно, второе пространство вставки сужается вверх в направлении вытянутой прямой переходной области между двумя вторыми поверхностями примыкания. Оно имеет вторую продольную ось и четвертую поверхность примыкания, проходящую вдоль второй продольной оси и направленную к первому пространству вставки в направлении, перпендикулярном первой плоскости. Четвертая поверхность примыкания, которая может, например, являться вершиной V в случае V-образного расположения вторых граничных поверхностей, сконфигурирована, чтобы приходить в контакт первой поверхностью примыкания вдоль всей своей длины, когда первая и вторая продольные оси параллельны друг другу и соединительный элемент находится в самом верхнем положении - или положении, наиболее удаленном от первого пространства вставки вдоль второго направления - внутри второго пространства вставки, и чтобы затем удерживать соединительный элемент от перемещения во втором направлении и в направлении, перпендикулярном первому и второму направлениям.
Более того, вторая соединительная часть содержит по меньшей мере одну пятую поверхность примыкания, расположенную и сконфигурированную, чтобы приходить в контакт с по меньшей мере одной второй поверхностью примыкания, чтобы ограничивать перемещение соединительного элемента вдоль второй продольной оси в направлении от роботизированной руки. Она также содержит две разнесенные шестые поверхности примыкания, расположенные и сконфигурированные, чтобы приходить в контакт с двумя третьими поверхностями примыкания, когда первая поверхность примыкания контактирует с четвертой поверхностью примыкания, чтобы затем предотвратить вращательное перемещение второй соединительной части относительно второй продольной оси.
Более того, вторая соединительная часть содержит второе фиксирующее средство, выполненное с возможностью выборочного зацепления с первым фиксирующим средством, когда первая поверхность примыкания контактирует с четвертой поверхностью примыкания, по меньшей мере одна вторая поверхность примыкания контактирует с по меньшей мере одной пятой поверхностью примыкания, а две третьи поверхности примыкания контактируют с двумя шестыми поверхностями примыкания, при этом, когда первое и второе фиксирующие средства находятся в зацеплении, перемещение соединительного элемента вдоль второй продольной оси по направлению к роботизированной руке предотвращается. Это положение соответствует предопределенному взаимному расположению. Примыкание третьей и шестой поверхностей примыкания предотвращает относительное вращение между первой и второй соединительными частями относительно первой продольной оси. Примыкание первой и шестой поверхностей примыкания формирует трехточечную опору или поддержку.
Благодаря этой конструкции первой и второй соединительных частей, первая соединительная часть и вторая соединительная часть могут быть перемещены в предопределенное взаимное расположение и зацеплены в нем, в частности, простым образом без необходимости в электрических или пневматических средствах или с минимальной необходимостью в них. Нужно просто переместить роботизированную руку, в то время как средство перемещения обеспечивает вращательное перемещение соответствующего второго робота. Более конкретно, после приблизительного расположения одного из вторых роботов перед первым роботом, так чтобы роботизированная рука могла использоваться для введения соединительного элемента в сужающуюся первую секцию первого пространства вставки, соединительный элемент перемещают в первом направлении, параллельном первой плоскости, к отверстию первой секции первого пространства вставки, до тех пор, пока он напрямую не войдет во вторую секцию первого пространства вставки или пока он не придет в контакт с по меньшей одной из первых граничных поверхностей, и затем его направляют посредством них во вторую секцию, в то время как второй робот совершает вращательное движение. Другими словами, первые граничные поверхности обеспечивают направляющую функцию, чтобы направлять соединительный элемент во вторую секцию первого пространства вставки, и чтобы тем самым лучше выравнивать первую продольную ось со второй продольной осью, то есть, выполнять вращательную ориентацию второго робота относительно первой продольной оси соединительного элемента. Это является первым этапом самоцентрирования, который позволяет начинать всего лишь с очень приблизительной относительной ориентации первого и второго робота относительно друга, для соединения.
После этого, соединительный элемент перемещают, перед тем или после того, как по меньшей мере одна вторая поверхность примыкания была приведена в контакт с по меньшей мере пятой поверхностью примыкания, вверх во втором направлении до тех пор, пока первая поверхность примыкания не придет в прямой контакт с четвертой поверхностью примыкания, или до тех пор, пока соединительный элемент не придет в контакт с по меньшей мере одной из вторых граничных поверхностей, и затем он направляется с их помощью, в то время как второй робот может выполнять дальнейшее вращательное перемещение, до тех пор, пока первая продольная ось не станет параллельна второй продольной оси и первая поверхность примыкания не придет в контакт с четвертой поверхностью примыкания. Другими словами, вторые граничные поверхности обеспечивают дополнительную направляющую функцию, чтобы направлять соединительный элемент в направлении, параллельном первой плоскости, и чтобы дополнительно улучшать выравнивание первой продольной оси со второй продольной осью, то есть, вращательную ориентацию второго робота относительно первой продольной оси соединительного элемента. Это является вторым этапом самоцентрирования.
В этой последовательности этапов, возможно, например, перемещать соединительный элемент, после по меньшей мере частичной вставки в первое пространство вставки, сначала вверх во втором направлении на предопределенное расстояние, чтобы выровнять по меньшей мере одну вторую поверхность примыкания с по меньшей мере одной пятой поверхностью примыкания, с тем чтобы с дальнейшим перемещением соединительного элемента в первом направлении по меньшей мере одна вторая поверхность примыкания приходила в контакт с по меньшей мере одной пятой поверхностью примыкания. В этом случае, только затем выполняется дальнейшее перемещение вверх.
В данном варианте осуществления, соединительный элемент предпочтительно может содержать два выступа, проходящих от противоположных сторон от соединительного элемента относительно первой продольной оси. Каждый такой выступ имеет первую прямую кромку, определяющую одну из вторых поверхностей примыкания, при этом две первые прямые кромки предпочтительно могут тянуться горизонтально и, более предпочтительно, в общей горизонтальной плоскости, и/или вторую прямую кромку, определяющую одну из третьих поверхностей примыкания, при этом две вторые прямые кромки предпочтительно могут тянуться вертикально и, более предпочтительно, в общей вертикальной плоскости.
В качестве альтернативы или дополнительно, вторая секция первого пространства вставки является частью вытянутого канала постоянной ширины между параллельными частями первых граничных поверхностей.
Кроме того, в качестве альтернативы или дополнительно, вторые граничные поверхности являются участками поверхности по меньшей мере одного граничного элемента, определяющего по меньшей мере пятую поверхность примыкания. Например, в случае, когда граничный элемент является пластинчатым, по меньшей мере одна пятая поверхность примыкания может обеспечиваться конечными или боковыми кромками граничного элемента.
Кроме того, в качестве альтернативы или дополнительно, две шестые поверхности примыкания являются участками поверхности пластинчатого элемента, например, опорной плиты, на которую устанавливается инструментальная часть, как в варианте осуществления с несколькими уровнями, как описано выше.
В каждом из вышеприведенных вариантов осуществления, содержащих третьи поверхности примыкания, угловая ориентация третьих поверхностей примыкания, таких как, например, вторые прямые кромки, может являться регулируемой, тем самым, предпочтительно, позволяя компенсировать допустимые отклонения.
В предпочтительном варианте осуществления, второе средство управления выполнено с возможностью принимать команду управления, которая адресована конкретному второму роботу, указывающую соответствующему второму роботу перемещаться в местоположение в пределах диапазона перемещения роботизированной руки. Для этой цели, второе средство управления управляет приводной частью, чтобы работать в соответствии с командой управления. Как только местоположение в пределах диапазона перемещения роботизированной руки достигнуто, роботизированная рука может управляться первым средством управления, чтобы перемещаться с целью соединения первой и второй соединительных частей образом, описанным выше.
Команда управления, указывающая соответствующему второму роботу перемещаться в местоположение в пределах диапазона перемещения роботизированной руки, может, например, являться командой управления, сформированной вышеописанным центральным узлом управления, удаленным узлом управления, переносимым техником, или голосовой командой, принятой от техника. В последнем случае, второе средство управления второго робота может обеспечиваться по меньшей мере ограниченной способностью распознавания речи. Голосовые команды могут быть особенно полезны, так как техник, которому нужно выполнить одну из конкретных операций, должен просто позвать соответствующего второго робота, который может располагаться в удаленном положении ожидания, без необходимости в дополнительном оборудовании.
В целом, команда управления может включать в себя информацию о местоположении, обозначающую конкретное местоположение в пределах диапазона перемещения роботизированной руки, которая затем используется во время управления, чтобы переместить второго робота в соответствующее местоположение. Например, команда управления может являться командой IMES (система передачи сообщений в помещении).
Первый робот может быть сконфигурирован, чтобы детектировать, когда второй робот достигает определенного местоположения или конкретного местоположения в пределах диапазона перемещения роботизированной руки, и чтобы управлять роботизированной рукой с целью соединения первой и второй соединительных частей на основании такого детектирования. Например, первый робот может быть оборудован камерой, лазерной измерительной системой, инфракрасной измерительной системой, системой измерения расстояния или каким-нибудь другим типом устройства датчика, выполненного с возможностью распознавания присутствия второго робота. При использовании камеры, детектирование может быть основано на распознавании образов, реализованном на первом устройстве управления, при этом вторые роботы могут быть обеспечены метками, которые создают образ, легко распознаваемый алгоритмом распознавания образов. Также возможно, чтобы первый робот включал в себя приемники, выполненные с возможностью детектирования лазерных лучей разных длин волн, излучаемых лазерами, обеспеченными на вторых роботах. Все вышеперечисленные измерительные системы и датчики могут, в качестве альтернативы или, предпочтительно, дополнительно, использоваться, чтобы непрерывно или периодически детектировать положение, и, предпочтительно, также ориентацию, второго робота относительно роботизированной руки во время процедуры соединения, и соответствующее управление роботизированной рукой первым средством управления предпочтительно основано на детектированном положении. Это полезно, так как вторые роботы могут быть сконструированы недорогим образом без навигационных возможностей, позволяющих им точно достигать абсолютного положения. В целом, во всех вариантах осуществления изобретения, предпочтительно, чтобы вторые роботы не обеспечивались такими точными навигационными возможностями, но чтобы они обеспечивались только возможностями, позволяющими им приблизительно достигать указанного абсолютного положения, или, предпочтительно, указанного относительного положения относительно конкретных элементов производственной среды, таких как стенки фюзеляжа летательного аппарата или космического корабля или другие стенки, присутствующие в производственной среде, такие как, например, стенки комнаты, в которой расположен такой фюзеляж, или подвижные стенки, которые выполненные с возможностью подходящего расположения техниками, чтобы направлять вторых роботов вдоль требуемого пути. Например, каждый из вторых роботов может содержать устройство датчика расстояния, включающее в себя, например, один или более ультразвуковых датчиков, позволяющих им перемещаться вдоль по меньшей мере приблизительно обозначенного пути и по меньшей мере частично определенной ориентации на указанном расстоянии от стенки производственной среды.
В качестве альтернативы или дополнительно, как первое, так и второе средство управления могут быть выполнены с возможностью принимать команду управления, командующую роботизированной руке и соответствующему второму роботу перемещаться в местоположение, указанное командой управления. Как только положения достигнуты, роботизированная рука может выполнять предварительно запрограммированную последовательность соединительных движений и/или может управляться, как описано выше, на основании детектированного положения второго робота. В одном конкретном примере, в котором команда управления может, например, являться командой IMES, после приема команды управления, как роботизированная рука, так и указанный второй робот перемещаются в местоположение, указанное командой управления. Дополнительно, роботизированная система содержит портативную контрольную базу, которая может быть гибко и выборочно размещена техником в разных местоположениях. Контрольная база обеспечена средством детектирования положения, таким как ультразвуковые датчики, инфракрасные измерительные средства, лазерные измерительные средства, оптические измерительные средства и/или магнитные датчики, позволяющие контрольной базе точно определять положение второго робота и, предпочтительно, также роботизированной руки, когда они находятся в пределах определенного диапазона от контрольной базы. Дополнительно, контрольная база выполнена с возможностью беспроводным образом передавать команды управления такому второму роботу и, если это применимо, роботизированной руке, которые команды управления включают в себя навигационные команды для навигации от определенного положения до точного местоположения относительно контрольной базы. Второе средство управления и, если это применимо, первое средство управления, выполнены с возможностью управлять перемещением второго робота и роботизированной руки, соответственно, в согласии с командами управления, чтобы достигать точного местоположения относительно контрольной базы. Таким образом, техник может гибко выбирать местоположение для соединения между роботизированной рукой и вторым роботом просто посредством подходящего размещения контрольной базы и без вторых роботов, требующих абсолютно точных навигационных возможностей. В данном примере, первое и второе средства управления также могут быть выполнены с возможностью детектировать предопределенную близость контрольной базы, и чтобы переключать управление при детектировании такой близости.
В предпочтительной версии вышеописанного варианта осуществления, в котором второе средство управления выполнено с возможностью принимать команду управления, указывающую соответствующему второму роботу перемещаться в местоположение в пределах диапазона перемещения роботизированной руки, каждый из вторых роботов содержит устройство датчика, соединенное с соответствующим вторым средством управления и выполненное с возможностью распознавания предопределенного объекта, при этом второе средство управления выполнено с возможностью останавливать перемещение второго робота в местоположение в пределах диапазона перемещения роботизированной руки при детектировании предопределенного объекта в пределах определенного максимального расстояния. Предопределенный объект, который может, например, являться пластинчатым объектом, легко детектируемым посредством ультразвукового или другого датчика расстояния, может быть установлен на роботизированную руку и, в частности, на первую соединительную часть, такую как, например, соединительный элемент, упомянутый выше, с тем чтобы положение роботизированной руки определяло положение остановки второго робота, чтобы тем самым достичь определенного взаимного расположения между роботизированной рукой и первой соединительной частью и вторым роботом с целью соединения. В качестве альтернативы, предопределенный объект может являться портативным и располагаться отдельно от роботизированной руки, и роботизированная рука, подобным образом, может содержать устройство датчика, выполненное с возможностью распознавания предопределенного объекта, предпочтительно, в пределах определенного максимального расстояния, так чтобы роботизированная рука могла достигать предопределенного положения остановки относительно предопределенного объекта, в котором может быть выполнена предварительно запрограммированная последовательность соединительных движений роботизированной руки, как только второй робот достигает своего положения остановки относительно предопределенного объекта. В последнем случае, техник может гибко выбирать точное местоположение соединения посредством подходящего размещения предопределенного объекта.
В данном варианте осуществления, устройство датчика может являться устройством датчика расстояния, выполненным с возможностью детектирования расстояния между устройством датчика расстояния и предопределенным объектом, при этом второе средство управления выполнено с возможностью останавливать перемещение второго робота в местоположение в пределах диапазона перемещения роботизированной руки при детектировании предопределенного объекта на предопределенном расстоянии. Например, устройство датчика расстояния может содержать один или более ультразвуковых датчиков.
Вышеописанная роботизированная система может работать различными способами, подробно описанными выше. Следовательно, настоящее изобретение также обеспечивает соответствующие способы работы роботизированной системы. В одном из вариантов осуществления, способ работы роботизированной системы относится к варианту осуществления роботизированной системы, в котором первого робота располагают вблизи фюзеляжа летательного аппарата или космического корабля в производственной среде, с тем чтобы инструмент каждого второго робота мог достичь части фюзеляжа, когда его удерживают посредством роботизированной руки, роботизированная система дополнительно содержит по меньшей мере одного третьего робота, который имеет идентичную конструкцию с первым роботом и располагается в удаленной области хранения, в которой хранится множество предметов 12 в отделениях стеллажа для хранения, и множество вторых роботов содержит по меньшей мере одного второго робота первой категории, выполненного с возможностью выполнения конкретной операции, вовлекающей модификацию летательного аппарата или космического корабля, по меньшей мере одного второго робота второй категории, выполненного с возможностью выполнения конкретной операции, вовлекающей наблюдение, измерение или анализ результатов конкретной операции, выполняемой одним из вторых роботов первой категории, и по меньшей мере одного второго робота третьей категории, выполненного с возможностью выполнения конкретной операции, вовлекающей транспортировку конкретного типа предмета для использования техником для переделки или исправления результата конкретной операции, выполняемой одним из вторых роботов первой категории или наблюдаемой, измеряемой или анализируемой одним из вторых роботов второй категории. Затем, способ предпочтительно содержит приведение в действие первого робота и одного из вторых роботов первой категории, чтобы соединить второго робота с роботизированной рукой, чтобы выполнить соответствующую конкретную операцию, вовлекающую модификацию летательного аппарата или космического корабля, и чтобы затем отсоединить второго робота от роботизированной руки. После этого, способ предпочтительно содержит приведение в действие первого робота и одного из вторых роботов второй категории, чтобы соединить второго робота с роботизированной рукой, чтобы выполнить соответствующую конкретную операцию, вовлекающую наблюдение, измерение или анализ результатов конкретной операции, выполняемой одним из вторых роботов первой категории на предыдущем этапе. Затем, способ содержит анализ результата наблюдения, измерения или анализа, выполненного вторым роботом второй категории на предыдущем этапе, чтобы определить, необходим ли технику один из предметов, чтобы переделать или исправить результат конкретной операции, выполненной вторым роботом первой категории на первом этапе, и, если один из предметов необходим, приводят в действие, на основании анализа результата, третьего робота и одного из вторых роботов третьей категории, чтобы соединить второго робота с роботизированной рукой третьего робота, поднять второго робота с помощью роботизированной руки к определенному предмету, привести в действие второго робота, чтобы переместить предмет на инструмент второго робота, и разъединить первого и второго роботов, или переместить определенный предмет с помощью роботизированной руки на инструмент второго робота, и транспортировать определенный предмет посредством второго робота к технику в производственной среде. Дополнительные модификации этого способа были описаны подробно выше в соединении с роботизированной системой, содержащей вторых роботов первой, второй и третьей категорий.
Далее, предпочтительные варианты осуществления будут подробно пояснены со ссылкой на чертежи.
Фигура 1 показывает схематический обзор роботизированной системы согласно настоящему изобретению.
Фигура 2 показывает схематический обзор части другой роботизированной системы согласно настоящему изобретению.
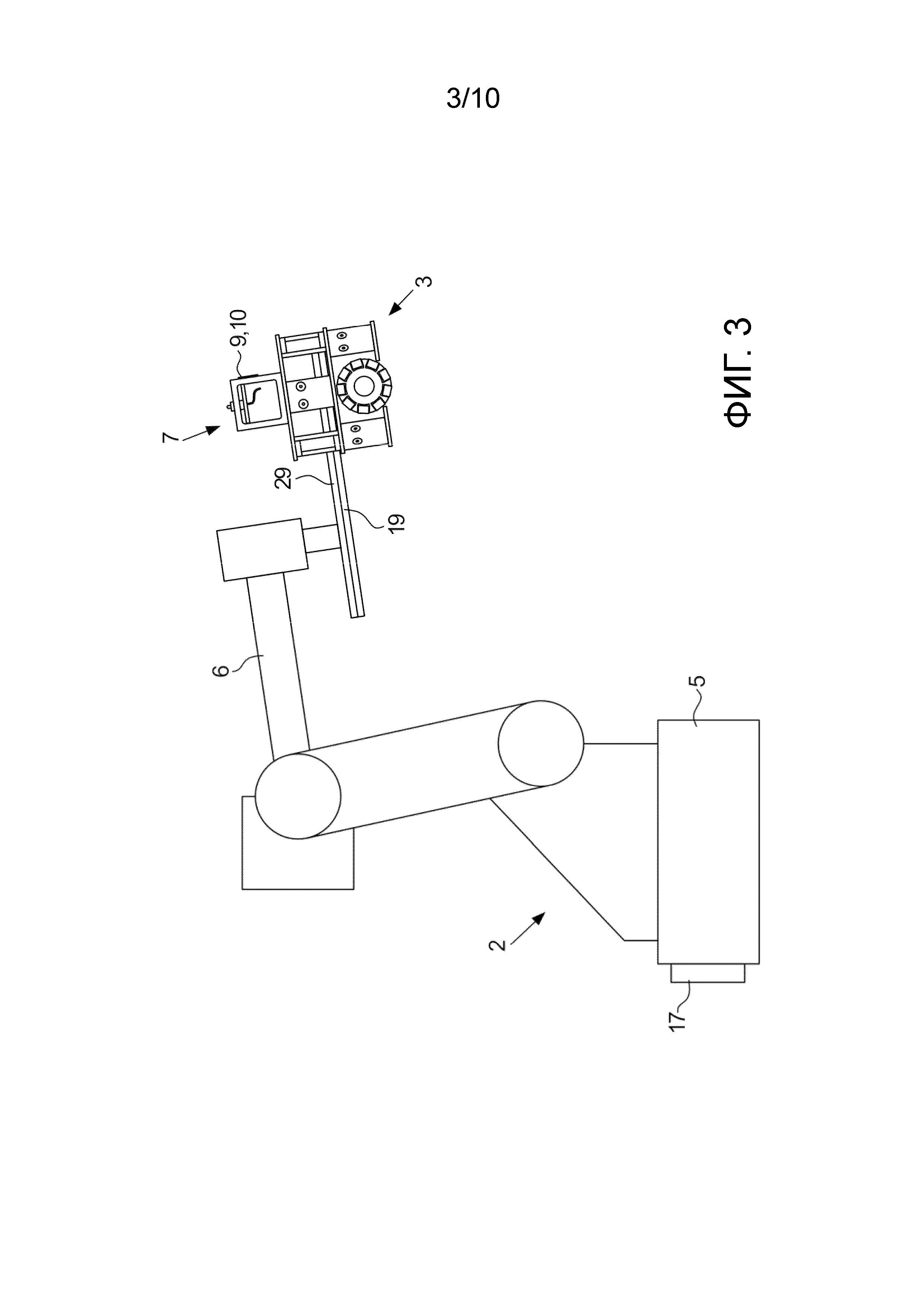
Фигура 3 показывает первого робота и второго робота, соединенных друг с другом, при этом второй робот выполнен с возможностью выполнения 3D печати.
Фигура 4 показывает подробный вид спереди второго робота, который выполнен с возможностью выполнения задачи по измерению или наблюдению.
Фигура 5 показывает подробный вид спереди второго робота, который выполнен с возможностью выполнения операции транспортировки, и
Фигура 6 показывает подробный вид спереди второго робота, который выполнен с возможностью выполнения операции 3D печати, и
Фигуры с 7a по 7c показывают схематическое представление возможного соединительного механизма для соединения первого и второго роботов, и
Фигура 8 показывает схематическое представление перемещения второго робота относительно первого робота.
Фигуры с 9a по 9e показывают балку и соединительную часть по фигурам 3 и 4 изолированным образом на схематическом виде в перспективе и иллюстрируют этапы соединения балки с соединительной частью.
Роботизированная система 1, показанная на фигуре 1, содержит по меньшей мере одного стационарного первого робота 2, который может являться традиционным промышленным роботом, и несколько меньших и подвижных вторых роботов 3. Первый робот 2 расположен внутри фюзеляжа 4 летательного аппарата или космического корабля во время сборки летательного аппарата или космического корабля. Он содержит основание 5 и роботизированную руку 6, проходящую от основания 5 и подвижную относительно него. Один из вторых роботов 3 показан соединенным с концом роботизированной руки 6, удаленным от основания 5, и роботизированная рука 6 используется, чтобы перемещать второго робота 3 в положение, в котором второй робот 3 может выполнять конкретную операцию в конкретном местоположении участка внутренней стенки фюзеляжа 4, и поддерживать его в этом положении.
Как будет более подробно пояснено со ссылкой на фигуры с 3 по 5 ниже, каждый из вторых роботов 3 содержит часть 7 инструмента, выполненную с возможностью выполнения одной из множества различных конкретных операций, так что, для выполнения одной выбранной операции из конкретных операций, соответствующий второй робот 3 может быть соединен с и поддерживаться роботизированной рукой 6, которая затем управляется, чтобы перемещать второго робота 3 в местоположение, в котором должна выполняться выбранная конкретная операция. Таким образом, преимущества первого робота 2, такие как высокая грузоподъемность, большой диапазон перемещения роботизированной руки 6 и высокая точность перемещения и позиционирования, синергетически объединяются с преимуществами вторых роботов 3, такими как относительно низкая цена, низкая опасность, угрожающая техникам 8, работающим вместе с первым и вторыми роботами 2, 3 внутри фюзеляжа 4, и специализированное предназначение для конкретной операции. Другими словами, первый робот 2 может являться роботом общего назначения, который гибко и выборочно приспосабливается к конкретной операции посредством соединения с соответствующим вторым роботом 3.
Часть 7 инструмента каждого из вторых роботов 3 включает в себя инструмент 9, выполненный с возможностью выполнения соответствующей конкретной операции. Например, инструмент 9 может являться 3D-принтером (смотрите также фигуры 3 и 6), выполненным с возможностью прямой печати трехмерного объекта, такого как, например, кронштейн, на участке фюзеляжа 4 (как описано, например, в документе EP 2 813 432), транспортным инструментом 11, выполненным с возможностью поддерживать и переносить предмет 12, такой как материал или инструмент для использования техником 8 (смотрите также фигуру 5), или инструмент 14 для измерения и наблюдения (смотрите фигуру 4), выполненный с возможностью выполнения конкретного измерения или наблюдения. Как проиллюстрировано на фигуре 1, вторые роботы, содержащие транспортный инструмент 11, могут использоваться, чтобы получать требуемый предмет 12 из удаленной области 15 хранения, в которой также расположены вторые роботы 3, не используемые в текущий момент, и переносить предмет 12 в фюзеляж 4. В этом отношении, такой второй робот 3 может затем соединяться с роботизированной рукой 3, чтобы поднимать предмет 12 в поднятое местоположение, в котором он нужен технику 8. Тем не менее, как проиллюстрировано на фигуре 1, также возможно, что второй робот 3 используется, чтобы напрямую переносить предмет 12 в местоположение, выбранное техником 8, без соединения с роботизированной рукой 6. Удаленная область хранения может, например, являться логистическим складом для, например, завода или логистической комнатой для, например, космической станции.
Как пояснено выше, вторые роботы 3, включающие в себя 3D-принтер 10, являются вторыми роботами 3, 10 первой категории, выполненными с возможностью выполнения конкретной операции, вовлекающей модификацию летательного аппарата или космического корабля, вторые роботы 3, 14, включающие в себя инструмент 14 для измерения и наблюдения, являются вторыми роботами второй категории, выполненными с возможностью наблюдения, измерения или анализа результатов конкретной операции, выполняемой вторым роботом первой категории, а вторые роботы 3, 11, включающие в себя транспортный инструмент 11, являются вторыми роботами третьей категории, выполненными с возможностью выполнения конкретной операции, вовлекающей транспортировку конкретного типа инструмента для использования техником для переделки или исправления результата конкретной операции, выполняемой одним из вторых роботов 3, 10 первой категории или наблюдаемой, измеряемой или анализируемой вторым роботом второй категории. Например, результаты наблюдения, измерения или анализа, выполненного вторым роботом 3, 14 второй категории, может отображаться или обозначаться соответствующим вторым роботом 3, 14 второй категории, с тем чтобы техник мог запрашивать у второго робота 3, 11 третьей категории находить и приносить подходящий инструмент для переделки или исправления.
Стоит отметить, что по меньшей мере один робот 2', который имеет конструкцию, идентичную первому роботу 2 и может заменить первого робота 2 в случае его неисправности, предпочтительно располагается в удаленной области 15 хранения, тем самым создавая дополнительные резервы. Робот 2' приспособлен и выполнен с возможностью находить предметы 12 со стеллажа для хранения, содержащего много разных предметов 12 и загружать найденные предметы на второго робота 3, содержащего транспортный инструмент 11, либо соединять его роботизированную руку образом, описанным в материалах настоящей заявки, со вторым роботом 3, содержащим транспортный инструмент 11, и чтобы поднимать второго робота 3 к полке стеллажа для хранения, на которой хранится требуемый элемент 12, с тем чтобы второй робот 3 мог извлечь предмет 12 и загрузить его на свой транспортный инструмент 11. В последнем случае, транспортный инструмент 11 предпочтительно сконструирован так, что он включает в себя захватывающий элемент, который может быть вытянут в направлении полки стеллажа для хранения, захватить предмет 12 и втянуть его на второго робота 3. Робот 2' также может использоваться, чтобы поднимать вторых роботов 3 в другие местоположения в пределах удаленной области 15 хранения, такие как, например, местоположение зарядной станции.
Таким образом, вторые роботы 3 перемещаются вперед и назад, по требованию, между областью 15 хранения и производственной средой 16, такой как внутренняя область фюзеляжа 4. Работа и перемещение первого робота 2 управляется посредством узла 17 управления (смотрите фигуру 3), и работа и перемещение вторых роботов 3 управляется посредством узла 18 управления (смотрите фигуру 4), обеспеченного в каждом из вторых роботов 3. Эти узлы 17, 18 управления могут принимать команды от центрального узла управления (не показан). Тем не менее, предпочтительно, если узлы 18 управления вторых роботов 3 работают независимо и передают команды управления или программируемые команды узлу 17 управления первого робота 2 при соединении между соответствующим вторым роботом 3 и роботизированной рукой 6, так что первый робот 2 приспосабливается к требованиям конкретного второго робота 3 при соединении. Это обеспечивает особенно высокую степень гибкости и приспособляемости системы 1.
На фигуре 1, второй робот 3 соединяется с роботизированной рукой 6 и поддерживается ей во время выполнения конкретной операции. Тем не менее, как проиллюстрировано на фигуре 2, в качестве альтернативы или дополнительно, возможно, чтобы вторые роботы 3 размещались роботизированной рукой 6 в местоположении, в котором должна выполняться конкретная операция, и затем сами закрепляли себя в этом местоположении, например, посредством всасывающего средства, так чтобы роботизированная рука 6 могла использоваться для других целей во время выполнения конкретной операции вторым роботом 3. После этого, роботизированная рука 6 управляется, чтобы извлечь вторых роботов 3 и поставить их на землю, с тем чтобы они могли вернуться назад в область 15 хранения. Несколько вторых роботов 3 могут быть размещены и закреплены в разных местоположениях посредством одной роботизированной руки 6.
Фигура 3 показывает подробный вид в перспективе второго робота 3, соединенного с роботизированной рукой 6. Роботизированная рука 6 содержит соединительный элемент в форме вытянутой прямой балки 19, имеющей квадратное поперечное сечение. Балка 19 закрепляется на одной концевой области роботизированной руки 6 и проходит от роботизированной руки 6. Второй робот 3 закрепляется на балке 19 образом, описанным далее со ссылкой на фигуру 4.
Фигура 4 показывает вид спереди другого второго робота 3. Второй робот 3 содержит множество колес 20, которые сконфигурированы, чтобы допускать как поступательное перемещение второго робота 3, так и вращательное перемещение второго робота 3 относительно вертикальной центральной оси второго робота 3. Колеса 20 соединены с электродвигателем 21, с тем чтобы они могли быть приведены в движение посредством электродвигателя 21 для поступательного перемещения и, предпочтительно, также для вращательного перемещения. Электродвигатель 21 и колеса 20 установлены, вместе с узлом 18 управления, на первую установочную плиту 22a. Второй робот 3 также содержит вторую установочную плиту 22b и третью установочную плиту 22c, которые расположены на расстоянии друг от друга и на расстоянии от первой установочной плиты 22a, над первой установочной плитой 22a и параллельно ей. На третью установочную плиту 22c, которая является самой верхней установочной плитой, установлен инструмент 9, а на вторую установочную плиту 22b установлена соединительная часть 23. Установочные плиты 22a, 22b и 22c определяют три разных уровня, каждый из которых обладает специализированной функциональностью, так что второй робот 3 преимущественно имеет модульную конфигурацию, которая упрощает конструкцию и конфигурацию второго робота 3.
Фигура 5 показывает вид спереди еще одного второго робота 3, который идентичен второму роботу 3 по фигурам 3 и 4, с тем исключением, что часть 9 инструмента включает в себя транспортный инструмент 11 в форме захватывающего и удерживающего инструмента. На фигуре 5, контейнер 13, содержащий предмет 12, поддерживается посредством транспортного инструмента 11.
Соединительная часть 23, проиллюстрированная на фигурах 4 и с 9a по 9e, выполнена с возможностью соединения с балкой 19 самовыравнивающимся образом. Для этой цели, соединительная часть 23 содержит в целом U-образный первый направляющий элемент 24, изготовленный из металлического листового материала, и в целом V-образный второй направляющий элемент 25, также изготовленный из металлического листового материала. Первый направляющий элемент 24 сконфигурирован так, чтобы две противоположные части 24a, 24b внутренней поверхности в целом U-образной формы составляли две первые направляющие поверхности 24a, 24b, которые находятся на расстоянии друг от друга и ориентированы друг к другу в плоскости, параллельной плоскости, определенной второй установочной плитой 22b, тем самым определяя плоское первое пространство вставки 26 между ними. Первое пространство 26 вставки содержит входное отверстие, определенное между двумя концами 27a, 27b первых направляющих поверхностей 24a, 24b. Начиная с двух концов 27a, 27b, первые направляющие поверхности 24a, 24b сначала тянутся под углом относительно друг друга, чтобы определять сужающуюся секцию 26a пространства 26 вставки, перед переходом к параллельной относительной ориентации, чтобы определить прямую узкую секцию 26b канала.
Второй направляющий элемент 25 расположен над секцией 26b канала первого пространства 26 вставки таким образом, что вогнутая сторона V-образной формы ориентирована к секции 26b канала, а прямая линия вершины V-образной формы тянется по центру над продольным протяжением секции 26b канала и параллельно ему. Таким образом, второй направляющий элемент 25 расположен, чтобы обеспечивать две плоские вторые направляющие поверхности 25a, 25b, которые расположены под углом относительно друг друга и которые встречаются в переходной области 25c на прямой линии вершины V-образной формы. Благодаря этому расположению, вторые направляющие поверхности 25a, 25b определяют и ограничивают второе пространство 28 вставки, которое сужается от секции 26b канала в направлении переходной области 25c.
Фигуры с 9a по 9e показывают балку и соединительную часть по фигурам 3 и 4 изолированным образом на схематическом виде в перспективе и иллюстрируют этапы соединения балки с соединительной частью. Для соединения балки 19 с соединительной частью 23, соответствующий второй робот 3 перемещается в положение в пределах диапазона перемещения роботизированной руки 6, с тем чтобы балка 19 могла быть вставлена в первое пространство 26 вставки (смотрите фигуру 9a). Благодаря сужающейся секции 26a, вращательная ориентация второго робота 3 не обязана быть точно выровнена с продольной осью балки 19. Вместо этого, когда колесам 20 допускают вращательное перемещение второго робота 3 относительно центральной вертикальной оси, в случае, когда продольная оси балки 19 не выровнена с продольной осью секции 26b канала, при перемещении балки 19 вдоль своей продольной оси в направлении второго робота 23 в плоскости первого пространства 26 вставки, балка 19 в итоге придет в контакт с одной из первых направляющих поверхностей 24a, 24b в области сужающейся секции 26a. С дальнейшим перемещением балки 19, она будет направляться вдоль первых направляющих поверхностей 24a, 24b в направлении секции 26b канала и в нее, в то время как второй робот 3 в то же время совершает соответствующее вращательное перемещение, тем самым выполняя первое выравнивание между продольной осью балки 19 и продольной осью переходной области 25c. Первое выравнивание является относительно грубым из-за относительно большой ширины секции 26b канала по сравнению с шириной балки 19.
Как только балка 19 была частично вставлена в секцию 26b канала (смотрите фигуру 9b), она перемещается вверх во второе пространство 28 вставки примерно на полпути между секцией 26b канала и переходной областью 25c (смотрите фигуру 9c). Затем, балка 19 опять перемещается вдоль своей продольной оси, до тех пор, пока передняя кромка 63a, 63b по меньшей мере одного из двух пластинчатых выступов 60a, 60b, проходящих поперечно с противоположных сторон балки 19, не придет в контакт с одной из передних кромок второго направляющего элемента 25, тем самым определяя предопределенное расстояние между роботизированной рукой 6 и вторым роботом 3 (смотрите фигуру 9d).
После этого, балку 19 опять перемещают вверх, в то время как выступы 60a, 60b скользят кромками 63a, 63b вдоль передней кромки второго направляющего элемента 25. Если только прямая верхняя кромка 29 балки 19 (смотрите фигуру 3) не идеально выровнена с переходной областью 25c, балка 19 в итоге придет в контакт с одной из вторых направляющих поверхностей 25a, 25b, и, с дальнейшим перемещением вверх, будет направляться в переходную область 25c до тех пор, пока верхняя кромка 29 не будет поддерживаться напротив переходной области 25c в вершине V-образной формы (смотрите фигуру 9e). В то же время, второй робот 3 будет выполнять поступательное и вращательное перемещение, которое осуществляет точное второе выравнивание между продольной осью балки 19 и продольной осью переходной область 25c, и также определяет предопределенную высоту второго робота 23 относительно роботизированной руки 6.
Благодаря контакту между верхней кромкой 29 балки 19 и переходной областью 25c, второй робот 3 удерживается от поступательного перемещения в горизонтальном направлении и от вращательного перемещения относительно вертикальной оси. Чтобы также удерживать второго робота 3 от вращательного перемещения относительно горизонтальной оси, верхние кромки 61a, 61b выступов 60a, 60b балки 19 сконфигурированы, чтобы приходить в контакт с нижней поверхностью третьей установочной плиты 22c в разнесенных местоположениях, тем самым завершая трехточечную поддержку (смотрите фигуру 9e). В этом состоянии, фиксирующий механизм входит в зацепление для предотвращения отсоединения второго робота 3 от балки 19. Например, фиксирующий механизм может содержать защиту 62 фиксации, проходящую поперечно от балки 19 рядом с ее концом и расположенную так, что она проходит за задние кромки второго направляющего элемента 25. Защита 62 фиксации находится на расстоянии от передних кромок 63a, 63b пластинчатых выступов 60a, 60b в осевом направлении балки 19, с тем чтобы направляющий элемент 25 удерживался вдоль оси между защитой 62 фиксации и передними кромками 63a, 63b, как проиллюстрировано на фигуре 9e.
В вышеописанном примере, соединительная часть 23 составляет первую соединительную часть, а балка 19 составляет вторую соединительную часть, которые выполненные с возможностью соединения друг с другом самовыравнивающимся образом. Альтернативный пример для соединительного устройства, содержащего первую соединительную часть 40, которая обеспечена на роботизированной руке 6 первого робота 2, и вторую соединительную часть 41, которая обеспечена на каждом из вторых роботов 3, схематически проиллюстрирован на фигурах с 7a по 7c. Первая соединительная часть 40 содержит несколько, например, три, гнезда 42, каждое из которых содержит часть 43 приема штифта и сужающуюся входную часть 44, сужающуюся в направлении части 43 приема штифта. Часть 43 приема штифта имеет такой размер, чтобы вытянутый штифт 45, например, с круглым поперечным сечением, мог входить в часть 43 приема штифта или выходить из нее через входную часть 44 посредством перемещения перпендикулярно продольной оси штифта 45 (показано двунаправленной стрелкой на фигуре 7b). Для каждого из гнезд 42, штифт 45 обеспечен в виде части второй соединительной части 41.
Гнезда 42 и штифты 45 расположены на соответствующем воображаемом круге (обозначенном пунктирной линией 46 на фигуре 7c) таким образом, что, когда первая и вторая соединительные части 40, 41 подходящим образом выровнены друг с другом, штифты 45 могут быть одновременно перемещены в части 43 приема штифта в положение, показанное на фигурах 7a и 7b, и из гнезд 42 посредством соответствующего относительного вращения первой и второй соединительных частей 40, 41 относительно друг друга относительно центральной оси круга 46 (смотрите фигуру 7c).
Вторая соединительная часть 41 дополнительно содержит, для каждого из штифтов 45, вытянутый и, например, цилиндрический фиксирующий болт 47, который является выборочно перемещаемым вдоль направления своей продольной оси между положением, проиллюстрированным на фигуре 7a, в котором он проходит во внутреннюю область связанного гнезда 42, так что штифт 45 защищается от покидания части 42 приема штифта, и положением, проиллюстрированным на фигуре 7b, в котором фиксирующий болт 47 извлечен из внутренней области гнезда 42, чтобы тем самым допускать вход и выход штифта 45. Например, фиксирующий болт 47 может вставляться через отверстия 48a, 48b (показано только на фигуре 7a), обеспеченные в боковых стенках части 43 приема штифта.
Вышеупомянутое перемещение фиксирующих болтов 47 предпочтительно осуществляется посредством соответствующего множества устройств 49 для перемещения фиксирующих болтов, которые, в проиллюстрированном варианте осуществления, являются пневматическими устройствами, содержащими цилиндр 50, в котором расположен подвижный поршень 51. Подвижный поршень 51 смещается посредством пружины 52 сжатия или другого смещающего средства в поршень, показанный на фигуре 7a, в котором фиксирующий болт 47 находится в положении фиксации. Чтобы переместить фиксирующий болт 47 в открытое положение по фигуре 7b, пневматическая среда, такая как сжатый воздух, может вводиться в цилиндр 50 через отверстие 53, тем самым перемещая поршень 51 вверх внутрь цилиндра 50 и, благодаря соединительной связи 54 между поршнем 51 и фиксирующим болтом 47, перемещая фиксирующий болт 47 из внутренней области части 43 приема штифта. Важно, что благодаря предварительному смещению фиксирующего болта 47 в положение фиксации посредством пружины 52, первая и вторая соединительные части 40 и 41 остаются надежно соединенными и закрепленными друг на друге в случае перебоя в питании, например, при потере пневматического давления. Также возможно, что устройства 49 для перемещения фиксирующих болтов являются устройствами с электроприводом, при этом фиксирующий болт 47 подобным образом предварительно смещается в положение фиксации.
Второе соединительное устройство 41 может обеспечиваться на вторых роботах 3 в любом подходящем местоположении и ориентации. Например, вторая соединительная часть 41 может быть установлена с помощью круга 46 в горизонтальной или вертикальной ориентации на второй установочной плите 22a вместо соединительного устройства 23, или под первой установочной плитой 22a, так чтобы плоскость круга 46 была параллельна первой установочной плите 22a. Первая соединительная часть 40 может быть установлена прямо на роботизированную руку 6 вместо балки 19, или, в качестве альтернативы, на балку 19. В последнем случае, соединительные устройства по фигуре 4 и фигурам с 7a по 7c также могут быть объединены таким образом, чтобы первая и вторая соединительные части 40 и 41 обеспечивались вдобавок к балке 19 и соединительной части 23 по фигуре 4 и составляли фиксирующий механизм балки 19 и соединительной части 23.
Стоит отметить, что также возможно, чтобы вышеупомянутые конфигурации первой и второй соединительных частей 40 и 41 были обращены, то есть, чтобы первая соединительная часть 40 содержала штифты 45 и устройства 49 для перемещения фиксирующих болтов, а вторая соединительная часть 41 содержала гнезда 42.
Второй робот также содержит три ультразвуковых датчика 30, 31 и 32 расстояния, при этом ультразвуковой датчик 30 расстояния расположен со стороны, видимой на фигуре 4, и направлен к роботизированной руке во время соединения, ультразвуковой датчик 31 расстояния расположен с противоположной стороны и направлен в противоположном направлении (смотрите фигуру 8), а ультразвуковой датчик 32 расстояния расположен, чтобы быть ориентированным в направлении, перпендикулярном направлениям, в которых ориентированы датчики 30 и 31, и, более конкретно, в направлении перемещения второго робота (смотрите фигуру 8). Стоит отметить, что другие типы датчиков расстояния также могли бы использоваться вместо ультразвуковых датчиков расстояния. Как проиллюстрировано на фигуре 8, ультразвуковой датчик 31 расстояния выполнен с возможностью распознавания расстояния между вторым роботом 3 и стенкой фюзеляжа 4, а узел 18 управления второго робота 3 выполнен с возможностью управления вторым роботом 3, чтобы перемещать его на предопределенное, выбираемое и регулируемое расстояние вдоль стенки. Датчик 30 выполнен с возможностью распознавания расстояния между ним и объектами перед ним, или для определения того, находится ли объект в пределах определенного максимального расстояния перед датчиком 30. Узел 18 управления принимает сигнал датчика от датчика 30 и выполнен с возможностью распознавания, на основании сигнала датчика, пластины 33, установленной на балке 19, и управления вторым роботом 3, чтобы останавливать его перемещение вдоль стенки фюзеляжа 4 перед пластиной 33. Таким образом, приблизительно определенное положение или ориентация второго робота 3 относительно балки 19 могут быть получены простым образом, не требуя, чтобы второй робот 3 содержал сложные навигационные средства. Ультразвуковой датчик 32 расстояния подобным образом выполнен с возможностью детектирования расстояния между ним и объектами перед ним, или для определения того, находится ли объект в пределах определенного максимального расстояния перед датчиком 32, а узел 18 управления принимает сигнал датчика от датчика 32 и выполнен с возможностью управления, на основании сигнала датчика, вторым роботом 3, чтобы останавливать его перемещение при детектировании препятствия на пути перемещения, или чтобы изменять путь перемещения для обхода препятствия, например, посредством регулировки расстояния, поддерживаемого между стенкой 4 и датчиком 31
Реферат
Изобретение относится к роботизированной системе для выполнения сборки или технического обслуживания летательного аппарата или космического корабля. Система содержит первый робот (2), основание (5), подвижную роботизированную руку (6), содержащую первую соединительную часть (19), и первое средство (17) управления рукой (6). Система также содержит множество вторых роботов (3), содержащих средство (20) перемещения, приводную часть (21), инструментальную часть (7), вторую соединительную часть (23), выполненную с возможностью выборочного и съемного соединения с первой соединительной частью (19) в заданном взаимном расположении, и второе средство (18) управления вторым роботом (3). Первое и второе средства (17, 18) управления выполнены с возможностью управлять приводной частью (21) одного из вторых роботов (3) и роботизированной рукой (6) для соединения первой соединительной части (19) и второй соединительной части (23) в заданном взаимном расположении, роботизированной рукой (6) для перемещения инструментальной части (7) вместе со вторым роботом (3), поддерживаемым роботизированной рукой (6), в выбранное местоположение, и вторым роботом (3) для выполнения конкретной операции в выбранном местоположении. Изобретение обеспечивает эффективное использование системы в средах с ограниченным пространством. 3 н. и 13 з.п. ф-лы, 9 ил.
Комментарии