Сенсорное покрытие для промышленного устройства - RU2722379C2
Код документа: RU2722379C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к автоматизированным устройствам, используемым в области промышленного производства, и разработано, в частности, в связи с проблемой взаимодействия между человеком-оператором и таким автоматизированным устройством. Предпочтительным применением изобретения является робототехника, однако возможна успешная его реализация и на других устройствах, используемых в области промышленного производства.
УРОВЕНЬ ТЕХНИКИ
Для того чтобы эффективно использовать автоматизацию в производственных процессах и повысить тем самым их эффективность, необходимо обеспечить естественное и безопасное взаимодействие между людьми-операторами и автоматизированными устройствами, в частности роботами. Таким образом, людям-операторам можно доверить те процессы, которые бы требовали чрезмерно сложной автоматизации, тогда как операции, которые предполагают, например, значительные усилия, быстроту исполнения, высокую точность и качество, могут быть доверены автоматизированным устройствам.
Для осуществления этих условий производства необходимы решения, которые делают взаимодействие человека с автоматизированными устройствами естественным и безопасным. Подходы, используемые в настоящее время для этой цели, в основном связаны с проблемами пассивной безопасности и активной безопасности.
В частности, в отношении промышленных роботов способы, связанные с повышением пассивной безопасности при взаимодействии между человеком-оператором и манипулятором робота, в основном направлены на изменение конструкции и работы последнего, чтобы уменьшить вероятность несчастных случаев и степень их серьезности. В соответствии с этим подходом, например, были предложены манипуляторы робота, которые отличаются легкими конструкциями, покрыты мягкими материалами и не имеют острых краев или углов, чтобы свести к минимуму вред вследствие возможного удара по человеку-оператору.
В способах, связанных с повышением активной безопасности, вместо этого используются стратегии управления, основанные на специализированной сенсорной системе, направленной на обеспечение постоянного мониторинга среды, окружающей манипулятор робота, для динамического изменения его поведения в случае потенциально опасных ситуаций, таких как приближение человека-оператора к манипулятору или контакт между оператором и манипулятором во время исполнения заданной функции. В настоящее время для этой цели в основном используются следующие типы сенсоров:
- сенсоры для оптической реконструкции геометрии среды, окружающей манипулятор, такие как видеокамеры и лазерные сканеры;
- электрические сенсоры для распознавания контакта или столкновения между манипулятором и человеком-оператором, такие как сенсоры силы или контактные сенсоры;
- электрические сенсоры для распознавания чрезмерного сближения между манипулятором и человеком-оператором, такие как сенсоры приближения.
Были предложены роботы, в которых эти две стратегии пассивной безопасности и активной безопасности интегрированы в сенсорное покрытие или покровный слой соответствующего манипулятора. В целом эти покрытия представляют собой своего рода "кожу", которая преимущественно выполнена из упругодеформируемого материала, охватывает соответствующую часть манипулятора и включает в себя контактные сенсоры и/или сенсоры приближения.
Установка этих известных покрытий на подвижной конструкции манипулятора в целом сложна и далека от практической реализации. Кроме того, является трудоемкой соответствующая операция по удалению или замене покрытия или его частей в случае повреждений.
Сходные проблемы встречаются также и в автоматизированных устройствах с подвижными частями, отличными от роботов, используемых в области промышленного производства.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение направлено в основном на создание сенсорного покрытия для автоматизированного промышленного устройства, в частности, робота, которое свободно от вышеуказанных недостатков и обеспечивает при этом высокую степень взаимодействия между устройством и человеком-оператором, одновременно обеспечивая соответствие необходимым требованиям безопасности.
Эта и другие задачи, которые будут ясно изложены ниже, достигаются согласно настоящему изобретению в сенсорном покрытии для автоматизированного промышленного устройства и в промышленном устройстве, которые охарактеризованы в прилагаемой формуле изобретения.
Формула изобретения является неотъемлемой частью технических сведений, раскрытых в данном документе в отношении изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие задачи, характеристики и преимущества настоящего изобретения следуют из приведенного ниже описания и прилагаемых чертежей, которые иллюстрируют исключительно пояснительные и неограничивающие примеры осуществления и на которых:
- фиг. 1 представляет собой частичный схематический вид в аксонометрии автоматизированного устройства согласно возможным вариантам осуществления изобретения;
- фиг. 2 представляет собой схематический вид в аксонометрии части устройства с фиг. 1, сенсорным покрытием согласно возможным вариантам осуществления изобретения;
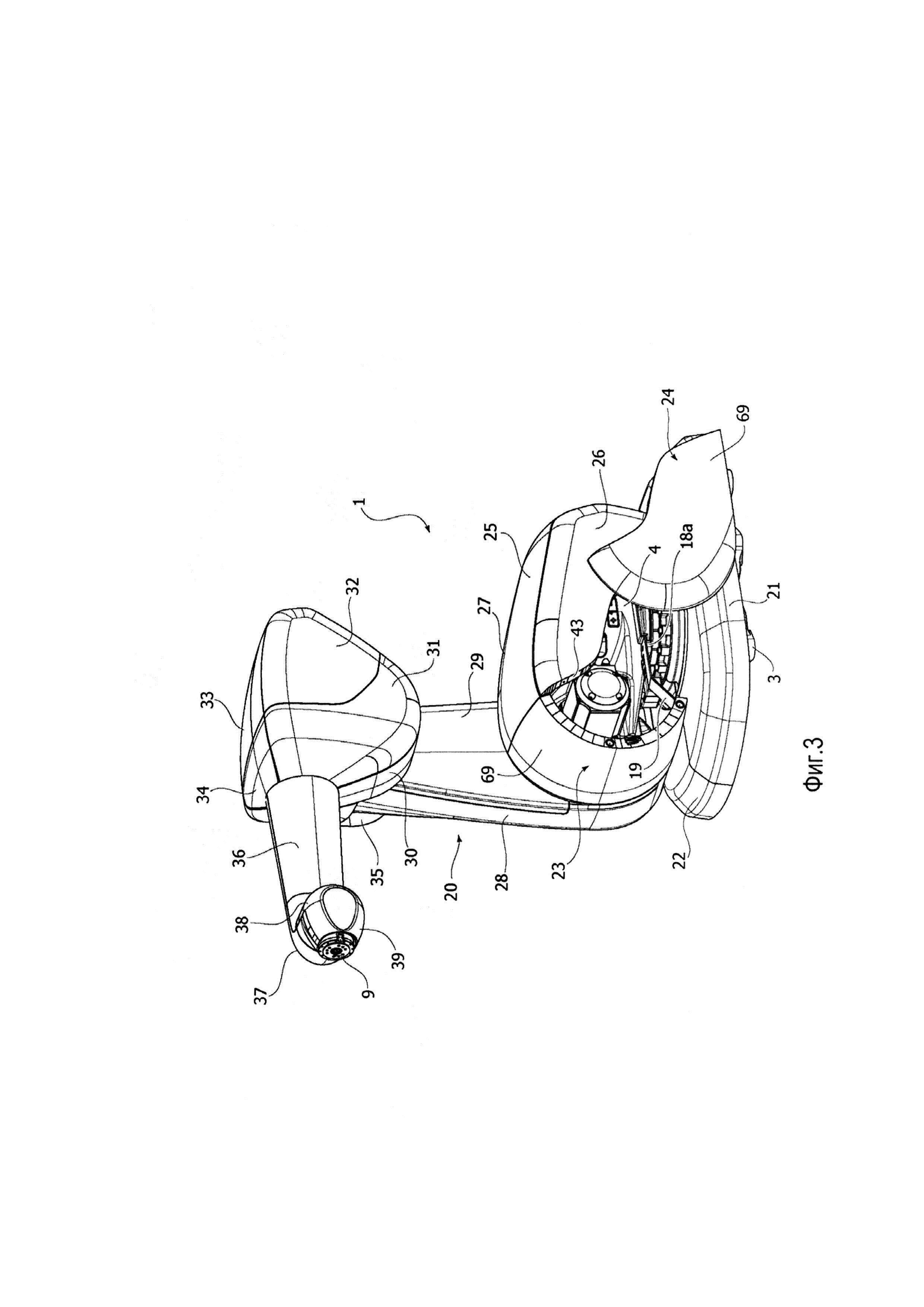
- фиг. 3 представляет собой часть покомпонентного вида части устройства с фиг. 2;
- фиг. 4 и 5 представляют собой схематические виды в аксонометрии двух модулей сенсорного покрытия, которые могут быть использованы в автоматизированном устройстве согласно возможным вариантам осуществления, соответственно, в разъемном состоянии и в состоянии соединения;
- фиг. 6 представляет собой схематическое изображение в поперечном разрезе возможной слоистой конфигурации покрывающего модуля сенсорного покрытия в соответствии с возможными вариантами осуществления изобретения;
- фиг. 7-11 представляют собой частичные и схематические изображения некоторых возможных конфигураций электрического соединения между покрывающими модулями сенсорного покрытия в соответствии с возможными вариантами осуществления изобретения;
- фиг. 12 представляет собой схематический вид в аксонометрии другого автоматизированного устройства в соответствии с возможными вариантами осуществления изобретения;
- фиг. 13 представляет собой часть покомпонентного схематического вида устройства, с фиг. 12, без показа покрывающего модуля;
- фиг. 14 представляет собой схематический вид в аксонометрии другого автоматизированного устройства согласно возможным вариантам осуществления изобретения;
- фиг. 15 представляет собой схематический вид в аксонометрии устройства с фиг. 14 без показа покрывающего модуля; и
- фиг. 16 представляет собой схематический вид в аксонометрии другого автоматизированного устройства согласно возможным вариантам осуществления изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Указание на «вариант осуществления» или «один вариант осуществления» изобретения в рамках настоящего описания предназначено для обозначения того, что конкретная конфигурация, конструкция или характеристика, описанные в отношении этого варианта осуществления, содержатся по меньшей мере в одном варианте осуществления изобретения. Таким образом, характеристики, описанные с указанием на «вариант осуществления», «по меньшей мере один вариант осуществления», «один или более вариантов осуществления» изобретения и т.п., которые могут присутствовать в различных частях описания, не обязательно все относятся к одному и тому же варианту осуществления изобретения. Кроме того, конкретные конфигурации, конструкции или характеристики могут быть объединены любым подходящим способом в одном или более вариантах осуществления изобретения. Используемые ниже ссылки приведены лишь для удобства и не определяют объем защиты или совокупность признаков вариантов осуществления изобретения.
Кроме того, следует отметить, что далее автоматизированные устройства, в отношении которых приведены возможные примерные варианты осуществления изобретения, описаны ограниченно, в объеме элементов, достаточных для раскрытия сущности изобретения.
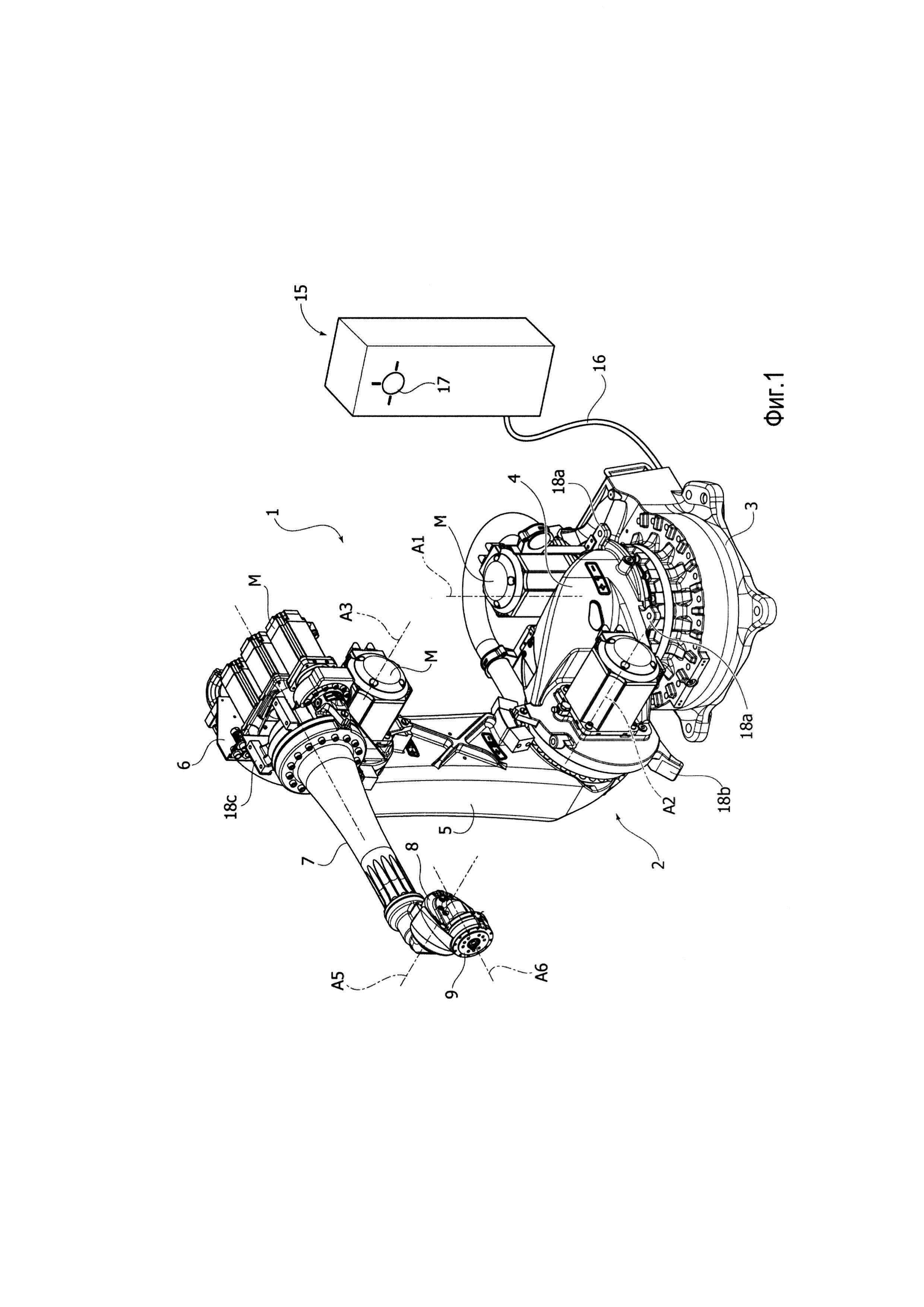
На фиг. 1 показан схематический вид автоматизированного устройства для использования в промышленном производстве в соответствии с возможными вариантами осуществления изобретения. В показанном примере устройство представляет собой робот, содержащий манипулятор 1 с несколькими степенями свободы, имеющий подвижную конструкцию 2, которая включает в себя множество соединенных вместе частей, а также приводные средства, которыми можно управлять, чтобы обеспечить перемещения этих частей конструкции 2.
В показанном примере робот является антропоморфным роботом с шестью степенями свободы, имеющим стационарное основание 3 и колонну 4, установленную на основании 3 с возможностью поворота вокруг первой оси А1 с вертикальной ориентацией. Цифрой 5 обозначена рука, установленная на колонне 4 с возможностью колебаний вокруг второй оси А2 с горизонтальной ориентацией. Цифрой 6 обозначен локоть, установленный на руке 5 для поворота вокруг третьей оси A3, которая также имеет горизонтальную ориентацию, при этом локтем 6 поддерживается предплечье 7, выполненное с возможностью поворота вокруг своей оси А4, составляющей, таким образом, четвертую ось перемещения манипулятора 1. Предплечье 7 имеет на своем конце запястье 8, установленное для перемещения согласно двум осям А5 и А6. Запястье 8 имеет фланец 9 для установки рабочего органа (не показан). Рабочий орган может представлять собой устройство для забора стандартного компонента, например, того типа, что показан на фиг. 12, или полировальное или шлифовальное устройство, например, того типа, что представлен на фиг. 14. Упомянутый выше рабочий орган в любом случае может быть любого типа и обладать любой функциональностью, известной в этой области техники; например, он может представлять собой сварочную горелку или зажим, пистолет-краскораспылитель или пистолет для нанесения герметика, сверлильный шпиндель и т.д.
Подвижные части 4-8 соединены вместе посредством сочленений известного типа, которые имеют связанные с ними соответствующие электрические двигатели, некоторые из которых обозначены буквой М, с соответствующей трансмиссией двигателя-редуктора с зубчатой передачей. В одном или более вариантов осуществления рабочий орган, связанный с фланцем 9, также имеет соответствующие приводные средства, в соответствии с известными технологиями. Предпочтительно с упомянутыми выше сочленениями или соответствующими двигателями М связаны соответствующие преобразователи (не показаны), например, типа кодового датчика или резольвера, для управления по положению.
Движения манипулятора 1, т.е. работа двигателей сочленений, управляются блоком 15 управления робота, который предпочтительно расположен в удаленном положении относительно манипулятора 1 и подсоединен к электрическим/электронным частям последнего через проводники проводки 16. Практические способы реализации аппаратных средств и программного обеспечения для блока 15, содержащего соответствующую систему микропроцессорного управления, выходят за рамки настоящего описания, за исключением некоторых конкретных функций, упомянутых ниже, которые относятся к возможным вариантам осуществления изобретения.
В одном или более вариантов осуществления изобретения блок 15 управления конфигурирован для управления манипулятором 1 с множеством различных режимов работы, включающих в себя по меньшей мере автоматический режим работы, а также предпочтительно ручной режим работы. Для этой цели блок 15 содержит средствоа17 выбора, которые могут использоваться пользователем для выбора требуемого режима работы из возможных режимов. По меньшей мере в одном варианте осуществления робот может работать по меньшей мере в режиме программирования, в автоматическом режиме и предпочтительно в дистанционном режиме. На фиг. 1 цифра 17 обозначает устройство для ручного выбора требуемого режима работы из возможных режимов. В режиме программирования оператор действует вблизи манипулятора для управления его работой, сохранения этапов программы и программирования рабочих операций, например, с помощью переносного устройства программирования (пульта обучения) или устройства ручного управления, связанного с подвижной конструкцией манипулятора 1, в частности, на его рабочем органе или вблизи него. В автоматическом же режиме робот выполняет предварительно записанную в память собственную рабочую программу, возможно в комбинации с некоторыми другими роботами или автоматизированным оборудованием, и взаимодействует с человеком-оператором для выполнения конкретной задачи. В дистанционном режиме робот также выполняет собственную рабочую программу внутри производственной ячейки, возможно взаимодействуя с человеком-оператором, но в этом случае начало выполнения программы поступает от супервизора ячейки, такого как программируемый логический контроллер (PLC), который, например, управляет как роботом, так и другим автоматизированным оборудованием, имеющимся в самой ячейке.
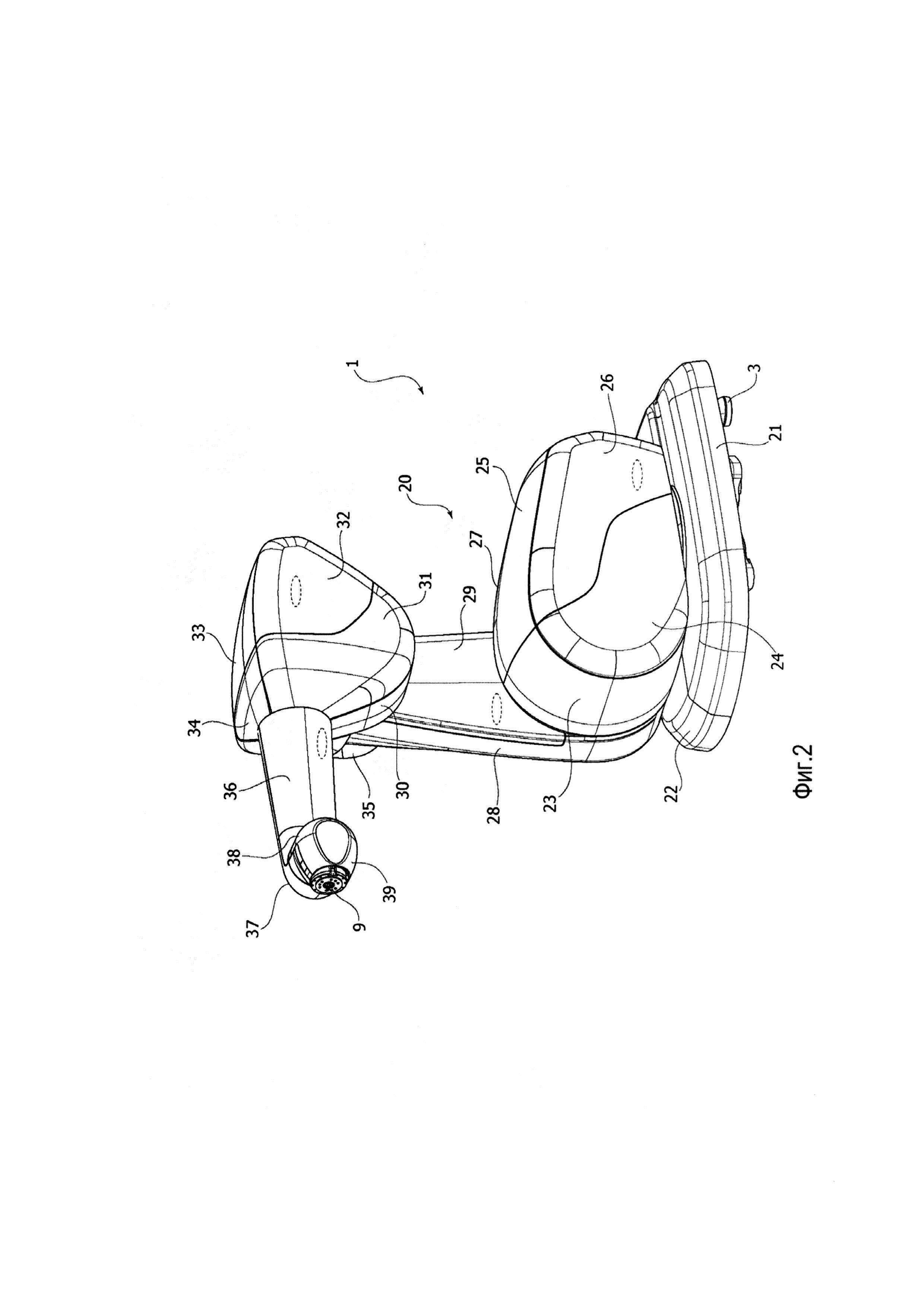
На фиг. 1 схематично показан манипулятор 1 в «голом» виде, чтобы пояснить возможную конфигурацию его подвижной конструкции 4-8. Однако в практических вариантах осуществления изобретения эта подвижная конструкция покрыта, по меньшей мере частично, сенсорным покрытием (показано на фиг. 2 и 3), где оно обозначено в целом цифрой 20. В одном или более вариантов осуществления, таком как показан на чертеже, покрытие 20 покрывает, по меньшей мере частично, также неподвижную конструкцию манипулятора 1, представленную здесь его основанием 3.
В состав покрытия 20 входят сенсорные средства, которые могут содержать контактные сенсорные средства, способные обнаруживать контакт или столкновение между манипулятором 1 и инородным телом, и/или сенсорные средства приближения, способные обнаруживать присутствие инородного тела в пределах по существу заданного расстояния от манипулятора, например, составляющего от 0 до 15/20 см. В различных предпочтительных вариантах осуществления покрытие включает в себя как контактные сенсорные средства, так и сенсорные средства приближения. Если в предпочтительных вариантах применения робот является роботом коллаборативного типа, вышеупомянутое инородное тело обычно представлено человеком-оператором, который работает в непосредственном контакте с манипулятором 1.
Сенсорное покрытие 20 содержит множество покрывающих модулей, некоторые из которых обозначены цифрами 21-39 только на фиг. 2, которые могут быть собраны вместе, образуя в целом своего рода тело, которое покрывает по меньшей мере часть подвижной конструкции манипулятора 1, предпочтительно, но необязательно практически всю подвижную конструкцию 4-8 манипулятора.
Как поясняется ниже, по меньшей мере некоторые из модулей 21-39 покрытия 20 имеют соответствующую несущую или поддерживающую конструкцию заданной формы, с которой связан по меньшей мере один слой упругодеформируемого материала, т.е. материала с возможностью поглощения удара. В предпочтительных вариантах осуществления несущая или поддерживающая конструкция каждого модуля выполнена из жесткого или полужесткого материала, так что конструкция может иметь требуемую заданную форму, меняющуюся в зависимости от той части манипулятора 1 (или другого автоматизированного устройства), которая должна быть покрыта.
Множество модулей 21-39 содержит один или более сенсорных покрывающих модулей, каждый из которых включает в себя соответствующие сенсорные средства упомянутого выше типа. Далее в настоящем описании возможный пример осуществления вышеупомянутых сенсорных модулей дан со ссылкой на модули, обозначенные цифрами 23 и 24, при этом подразумевается, что концепции, описанные в отношении этих модулей, применимы и к другим сенсорным модулям, например, тем, что обозначены цифрами 25-26, 28-29, 31-32, 36-37, 38-39 (очевидно, за исключением различающейся общей формы упомянутых модулей, которая определяется соответствующей несущей конструкцией).
В предпочтительных вариантах осуществления сенсорные модули содержат как контактные сенсорные средства, так и сенсорные средства приближения. С другой стороны, за рамки сущности изобретения не выходят покрывающие модули 20, содержащие лишь контактные сенсоры или лишь сенсоры приближения. Покрытие 20 также может содержать модули без сенсоров упомянутого типа, например, в зонах манипулятора 1 с пониженными рисками или последствиями, связанными с возможным соударением с человеком-оператором: например, покрывающие модули 21-22 основания 3 манипулятора 1 могут обойтись без сенсоров или иметь только сенсоры приближения, в связи с тем, что основание 3 в любом случае является стационарной частью манипулятора. Сходные соображения применимы к модулям, связанным с подвижными частями манипулятора 1, например, к модулю 33.
В различных вариантах осуществления по меньшей мере некоторые из покрывающих модулей должны быть разъемным образом зафиксированы на соответствующих нижележащих частях подвижной конструкции 4-8, таких как модули 23, 25 и 36, 37 с фиг. 2. Для этой цели указанные выше нижележащие части манипулятора 1 имеют специально предусмотренные установочные и/или крепежные элементы для соответствующих покрывающих модулей. Эти элементы могут быть образованы непосредственно телом частей манипулятора или же выполнены в виде элементов, нанесенных на эти части.
Как показано, например, на фиг. 1, цифрой 18а обозначены, например, два кронштейна для крепления модулей 23 и 25 с фиг. 2, цифрой 18b обозначен установочный и/или опорный элемент для модуля 23, при этом цифрой 18 с обозначен кронштейн для крепления модуля 34 с фиг. 2.
В различных вариантах осуществления фиксация модулей на вышеупомянутых установочных и/или крепежных элементах осуществляется с помощью дополнительных элементов механического соединения. Например, на фиг. 3, где модуль 24 является отдельным от модулей 23 и 26, частично показан элемент 19 для механического соединения модуля 23 с крепежным элементом 18а колонны 4 манипулятора 1. С другой стороны в возможных вариантах осуществления сама несущая конструкция модулей, которая должна закрепляться на частях манипулятора 1 - которая выполнена, например, из формуемого или термоформуемого пластикового материала - может иметь такую форму, что она непосредственно образует по меньшей мере часть элементов, необходимых для механического соединения и/или сцепления с конструкцией 2 манипулятора 1.
В одном или более предпочтительных вариантах осуществления один или более первых покрывающих модулей - например, модули 23 и 25 -закреплены с возможностью отсоединения на соответствующих частях подвижной конструкции (колонна 4 со ссылкой на приведенные в качестве примера модули 23 и 25), в частности, с помощью быстроразъемных соединительных средств, например элементов с защелкивающимися или щелевидными соединительными элементами.
В одном или более вариантов осуществления один или более вторых покрывающих модулей - например, модули 24 и 26 - прикреплены разъемным образом к одному или более из вышеупомянутых первых модулей и/или скреплены с разъемным образом вместе, в частности с помощью быстроразъемных средств, например, элементов с защелкивающимися или шлицевыми соединительными элементами. Например, модули 24 и 26 могут быть разъемно присоединены соответственно к модулям 23 и 25, которые, в свою очередь, разъемно присоединены к конструкции манипулятора. Кроме того, как поясняется ниже, сами модули 24 и 26 соединены вместе разъемным образом.
Как уже указано, предпочтительно средства для разъемного присоединения покрывающих модулей друг к другу и/или к подвижной конструкции манипулятора являются быстроразъемными соединительными средствами, такими как разъемные зажимы защелкивающегося действия или шлицевые соединительные элементы. С другой стороны, в альтернативных вариантах осуществления разъемная фиксация одного или более модулей на конструкции 2 и/или вместе может быть получена с использованием резьбовых элементов, таких как винты и т.п.
В одном или более предпочтительных вариантов осуществления используются модули покрытия 20, которые имеют по меньшей мере одну электронную плату управления, предпочтительно связанную с соответствующей несущей конструкцией. Эта плата управления соединена с возможностью обмена сигналами с блоком 15 управления манипулятора 1 и к ней электрически подсоединены сенсорные средства по меньшей мере одного соответствующего сенсорного покрывающего модуля.
Эта плата управления предпочтительно выполнена с возможностью управления по меньшей мере работой сенсорных средств и подачи в блок 15 управления сигналов, отображающих контакт между манипулятором 1 и человеком-оператором (или другим инородным телом), и/или сигналов, отображающих присутствие человека-оператора (или другого инородного тела) в пределах по существу заданного расстояния от самого манипулятора. Как уже указано, в предпочтительных вариантах осуществления по меньшей мере один из сенсорных модулей содержит контактные сенсорные средства и сенсорные средства приближения, так что соответствующая плата управления способна подавать в блок 15 управления сигналы, отображающие оба вышеупомянутых условия, т.е. сигналы, отображающие контакт, и сигналы, отображающие приближение.
Каждый покрывающий сенсорный модуль может быть снабжен своей собственной платой управления или же сенсорный покрывающий модуль может быть снабжен группой плат управления, например, первой платой для управления сенсорными средствами упомянутого модуля и вторую плату для управления сенсорными средствами другого сенсорного покрывающего модуля, который, таким образом, может не иметь собственной платы управления. Также могут быть предусмотрены сенсорные модули, снабженные одиночной платой, способной управлять как сенсорными средствами вышеупомянутого модуля, так и сенсорными средствами другого модуля, который, таким образом, может обойтись без собственной платы управления. Кроме того, согласно той же логике, по меньшей мере одна плата управления может быть установлена на не-сенсорном покрывающем модуле, с присоединением к ней сенсорных средств по меньшей мере одного сенсорного модуля, который, таким образом, может даже обойтись без соответствующей платы управления. Таким образом, понятно, что один или более покрывающих модулей, даже снабженных собственными контактными сенсорными средствами и/или сенсорными средствами приближения, не обязательно должны быть оборудованы соответствующей платой управления. С этой точки зрения сенсорные средства одного или более сенсорных модулей без платы могут даже непосредственно сопрягаться с блоком 15 управления, в котором могут быть непосредственно реализованы функции соответствующей платы.
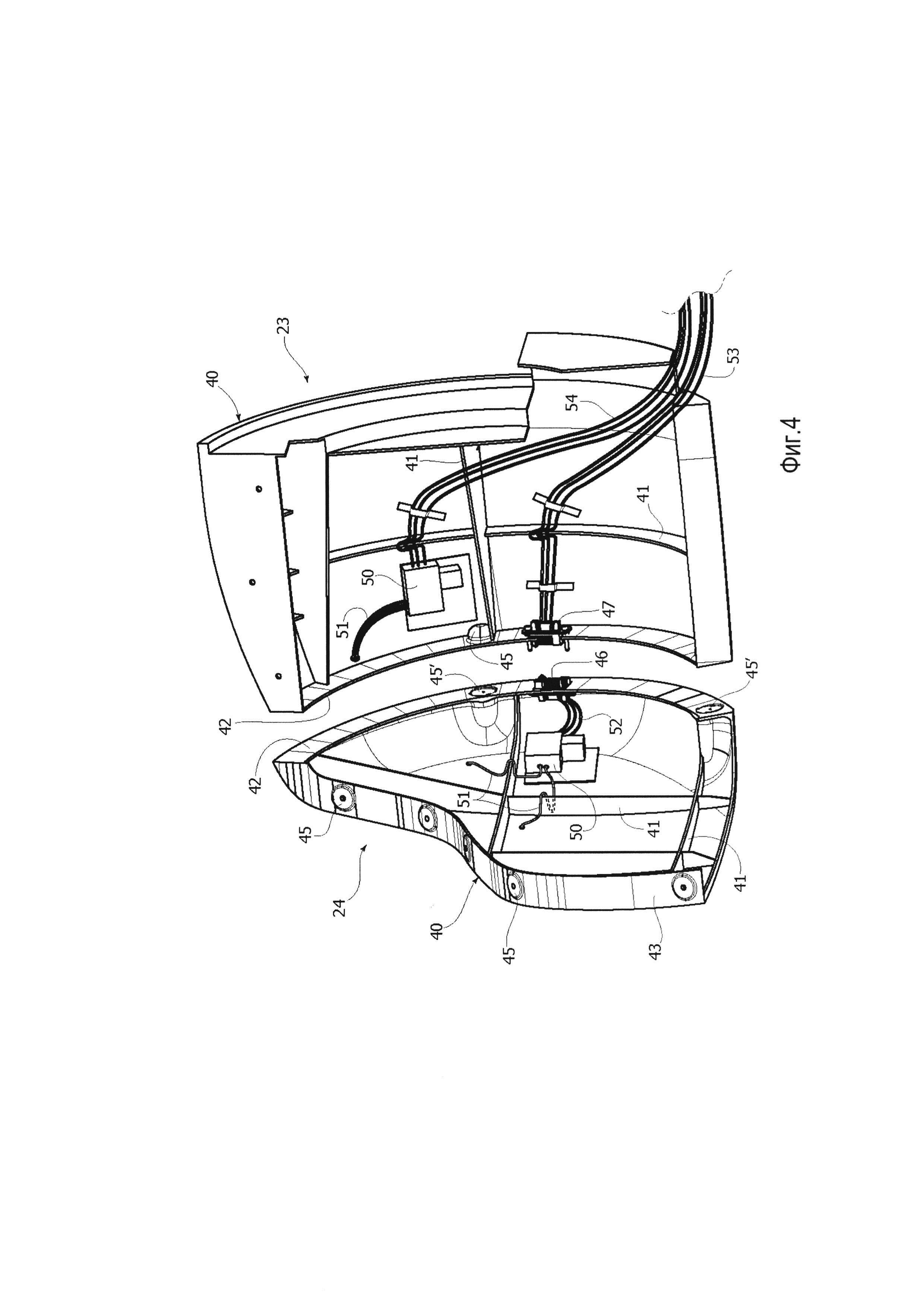
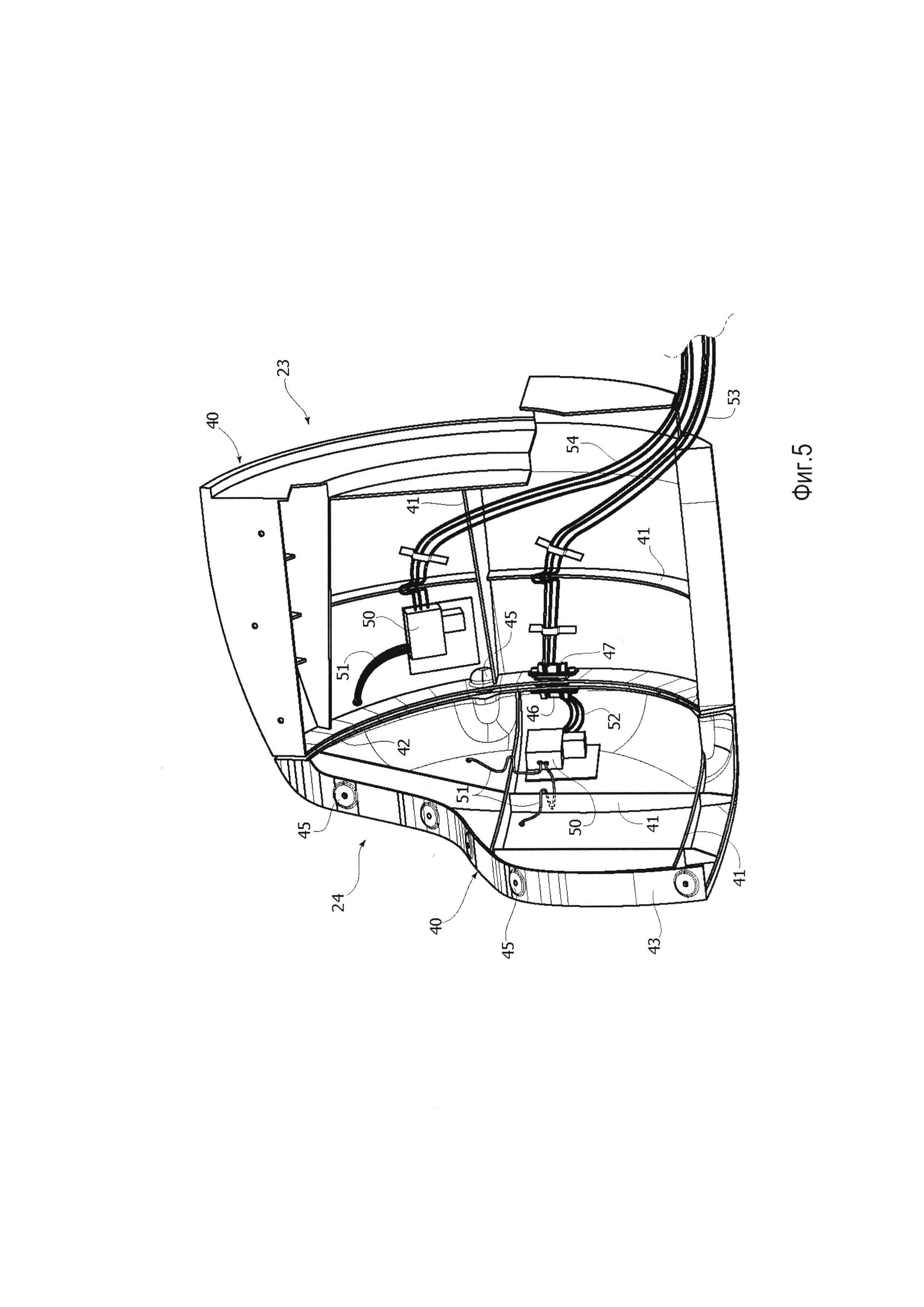
На фиг. 4 и 5 показаны для примера два сенсорных покрывающих модуля, соответствующих модулям 23 и 24 с фиг. 2-3. На этих фигурах видна внутренняя сторона вышеупомянутых модулей, т.е. сторона, по существу обращенная к нижележащей подвижной конструкции манипулятора 1 (здесь в основном колонна 4, см. фиг. 1).
На этих фигурах видна несущая или поддерживающая конструкция упомянутых модулей, обозначенная в целом цифрой 40. Как поясняется ниже, в предпочтительных вариантах осуществления покрывающие модули 20 имеют в целом слоистую конструкцию, которая включает в себя: по меньшей мере один слой жесткого или полужесткого материала, необходимый для придания модулю требуемой заданной формы; по меньшей мере один слой пластичного материала, выполненный с возможностью поглощения возможного удара; и предпочтительно по меньшей мере один внешний покровный слой.
В одном или более вариантов осуществления сенсорные модули содержат один или более активных слоев, соответствующих имеющимся сенсорным средствам, и один или более пассивных слоев, соответствующих упругодеформируемой части модуля и его внешнему покровному слою. Несущая конструкция 40, которая сама образует слой покрывающего модуля, выполнена с возможностью поддержки вышеупомянутых активных и пассивных слоев.
Конструкции 40 модулей по существу выполнены в виде оболочек, имеющих форму, следующую форме соответствующих частей манипулятора 1, т.е. охватывающую или частично покрывающую их с получением по существу однородной поверхности для поддержки вышеупомянутых активных и пассивных слоев, а также для покрытия 20 в целом.
Конструкции 40 предпочтительно имеют такую форму, что между их внутренней стороной и нижележащими частями манипулятора 1 образован свободный зазор, достаточный для вмещения, например, электроники управления покрывающих модулей, соответствующей проводки и, возможно, выступающих элементов вышеупомянутых покрытых частей манипулятора, а также возможных элементов обеспечения принудительной вентиляции, например, для вентиляторов. Разумеется, что по этим причинам конструкции 40 различных покрывающих модулей могут отличаться друг от друга в зависимости от той зоны манипулятора, что должна быть покрыта. Для этой цели конструкция 40 - которая, например, может иметь толщину от 2 до 5 мм, предпочтительно 2,5-3,5 мм - предпочтительно выполнена из термопластичного полимера, например, из акрилонитрилбутадиенстирола (ABS), и, таким образом, ее легко осуществима литьем под давлением с использованием известного оборудования. Однако сущность изобретения подразумевает и возможность использования термореактивных материалов и/или формование конструкций 40 термоформованием или посредством других известных технологий, например трехмерной печати.
В предпочтительных вариантах осуществления конструкция 40 по меньшей мере некоторых модулей имеет такие форму и толщину, чтобы обеспечить возможность ее слома или разрушения в случае, когда соответствующий покрывающий модуль подвергается удару, происходящему с кинетической энергией, превышающей по существу заданное безопасное пороговое значение. Это пороговое значение предпочтительно выбирается так, чтобы предотвратить серьезные риски для безопасности человека-оператора в случае удара с рассматриваемым модулем: например, упомянутое пороговое значение - представляющее предельную энергию удара - может составлять от 100 Н⋅м до 200 Н⋅м, предпочтительно приблизительно 150 Н⋅м. В случае, когда требуется обеспечить максимальную защиту, например, также для предотвращения возможного повреждения лица оператора, безопасное пороговое значение может составлять от 60 Н⋅м до 100 Н⋅м.
На фиг. 4 и 5 можно видеть, что в одном или более предпочтительных вариантов осуществления конструкции 40 по существу имеют форму формованной оболочки, предпочтительно образуя более или менее выраженный свод или полость, внутренняя сторона которой может иметь ребра жесткости, некоторые из которых обозначены цифрой 41. Платы управления модулей, когда они предусмотрены, прикреплены к внутренней стороне соответствующей конструкции 40: в показанном примере оба модуля 23 и 24 имеют соответствующие платы управления, обозначенные цифрой 50 и показанные схематично. Крепление плат 50 к конструкциям 40 может выполняться известным методом, например, посредством резьбовых элементов или же приклеивания, или путем использования на внутренней стороне конструкций 40 соответствующих кронштейнов или гнезд для присоединения плат 50 путем защелкивания.
Цифрой 51 обозначена электрическая проводка, используемая для подсоединения плат 50 к сенсорным средствам соответствующего модуля, которые в рассматриваемом примере содержат контактные сенсоры и сенсоры приближения. Если эти сенсорные средства расположены за пределами внешней стороной конструкций 40 (не видны на фиг. 4-5), последние могут снабжаться отверстиями под проведение проводки 51.
В различных вариантах осуществления несущая конструкция 40 по меньшей мере некоторых модулей имеет связанные с ней механические соединительные средства для механического разъемного соединения вместе по меньшей мере двух покрывающих модулей. В предпочтительных вариантах осуществления вышеупомянутые механические соединительные средства относятся к типу быстроразъемных соединителей, например, с защелкивающимися соединительными элементами.
Как показано на примере с фиг. 4, в предпочтительных вариантах осуществления конструкция 40 первого модуля - в этом примере модуля 23 - имеет по меньшей мере одну периферийную поверхность или стенку 42, обращаемую к соответствующей периферийной поверхности или стенке 42 второго смежного модуля - в этом примере модуля 24 - при этом с упомянутыми обращенными друг к другу поверхностями или стенками связаны вышеупомянутые соединительные средства для механического соединения, обозначенные цифрами 45 и 45'. В этом примере соединительные средства 45 относятся по существу к типу «папа», тогда как соединительные средства 45' относятся по существу к типу «мама». Механические соединители указанного типа могут располагаться также на модулях без сенсорных средств.
В различных вариантах осуществления несущая конструкция 40 по меньшей мере некоторых модулей имеет связанные с ней электрические соединительные средства для электрического соединения вместе двух покрывающих модулей разъемным образом. В примере с фиг. 4 вышеупомянутые электрические соединительные средства обозначены цифрами 46 и 47, причем соединительные средства 46 по существу относятся к типу «папа», а соединительные средства 47 по существу относятся к типу «мама». Предпочтительно, как показано на фиг. 4, электрические соединительные средства 46, 47 связаны с обращенными друг к другу стенками 42 двух модулей, подлежащих электрическому соединению, а модули 23 и 24, предпочтительно дополнительно, но, возможно, также в качестве альтернативы, с механическими соединительными средствами 45, 45'.
Ясно, что конструкция 40 модуля - даже без сенсорных средств - может иметь несколько поверхностей или стенок для обращения к соответствующим поверхностям или стенкам смежных модулей, причем обращенные друг к другу стенки имеют связанные с ними соответствующие механические соединительные средства и/или электрические соединительные средства: на фиг. 4 фактически показан случай, когда конструкция 40 модуля 24 имеет поверхность или стенку 43 (в этом случае в целом поперечную или перпендикулярную к стенке 42 самого модуля), содержащую механические соединительные средства 45, выполненные с возможностью соединения с соответствующими дополнительными механическими соединительными средствами, расположенными на поверхности или стенке модуля 26 и обозначенными цифрой 43 на фиг. 3. Дополнительно или в качестве альтернативы на стенках 43 модулей 23, 26 могут быть предусмотрены электрические соединительные средства указанного выше типа. Очевидно, что также могут использоваться несколько электрических соединительных средств на той же самой стенке 42 или на нескольких стенках 42, 43 первого модуля, которые выполнены с возможностью разъемного соединения с дополнительными электрическими соединительными средствами, расположенными на соответствующих стенках вторых модулей, смежных с первыми модулями.
На фиг. 4 цифрой 52 обозначена проводка для электрического соединения платы 50 управления модуля 24 с соответствующими электрическими соединительными средствами 46, при этом цифрой 53 обозначена проводка для соединения электрических соединительных средств 47 модуля 23 с блоком 15 управления, показанным на фиг. 1 (или, как указано выше, с электрическими соединительными средствами 46 или 47 другого модуля, необязательно сенсорного). Цифрой 54 обозначена проводка для электрического соединения платы 50 управления модуля 23 с блоком 15 управления с фиг. 1 (или с электрическими соединительными средствами 46 или 47 другого модуля, необязательно сенсорного). Поддерживающая конструкция 40 модулей может иметь такую форму, что она образует на ее периферийной стенке по меньшей мере один проход для проведения проводки, как показано, например, для модуля 23 по отношению к наборам проводок 53, 54.
Как следует из фиг. 4, форма конструкций 40, по существу напоминающая в целом вогнутую или выпуклую оболочку,, обеспечивает эффективное размещение плат 50 управления и соответствующих наборов проводок 51-53, причем последние предпочтительно локально прикреплены к внутренней стороне самих конструкций, например, посредством адгезивных лент или подходящих кабель-каналов.
На фиг. 5 модули 23 и 23 показаны в соединенном состоянии, т.е. с соответствующими стенками 42 с фиг. 4 в контакте или смежно друг к другу и с соединенными вместе механическими соединительными средствами 45, 45' и электрическими соединительными средствами 46, 47. Как показано на этой фигуре, предполагается, что концы наборов проводок 53 и 54 электрически подсоединены к блоку 15 управления с фиг. 1, с некоторыми проводниками этих проводок, что используются блоком 15 управления для обеспечения необходимого электрического питания (предпочтительно низковольтное питание) для плат 50 управления, и другими проводниками вышеуказанных проводок, что уже используются платами 50 управления для подачи в блок 15 управления сигналов, отображающих детектирование, выполненное сенсорными средствами, т.е. обнаружение контакта или соударения между манипулятором 1 и человеком-оператором (или другим инородным телом) и/или присутствие человека-оператора (или другого инородного тела) вблизи самого манипулятора.
Таким образом, благодаря этим независимым электрическим соединениям различные покрывающие модули 20 - описанные здесь на примере модулей 23 и 24 - могут работать независимо друг от друга, даже в случае отказа одного из модулей. Такой подход, очевидно, допускает различные возможные конфигурации покрытия 20, которое может содержать сенсорные модули, по существу покрывающие всю подвижную конструкцию манипулятора 1 или лишь ту его часть, что считается критически важной для целей взаимодействия с человеком-оператором, в соответствии с конечным применением робота.
Разумеется также, что таким образом блок 15 управления может быть выполнен и с возможностью идентификации платы 50 управления сенсорного модуля, подающего один из вышеупомянутых сигналов, отображающих контакт или приближение, причем сам блок управления, который, таким образом, распознает упомянутый модуль, связывается с зоной манипулятора, где произошел контакт и/или обнаружено приближение оператора или другого инородного тела, так чтобы предпринять необходимые действия.
Например, если сенсорные средства приближения конфигурированы для обнаружения присутствия инородного тела на максимальном расстоянии 15-20 см, то после обнаружения, выполненного с помощью упомянутых сенсорных средств, блок управления может управлять уменьшением скорости перемещения манипулятора 1 до скорости, считающейся безопасной для человека-оператора, например, составляющей от 150 до 250 мм/с.
Сходные стратегии могут быть реализованы после контакта самого человека-оператором с манипулятором. Например, предположим, что после уменьшения скорости, вызванного предыдущим сигналом, генерированным сенсорными средствами приближения, человек-оператор совершает непредвиденное перемещение и случайно наталкивается на поверхность сенсорного модуля. Вслед за соответствующим сигналом, сгенерированным контактными сенсорными средствами, блок 15 управления может остановить движение манипулятора 1 или же изменить направление его движения.
Следует отметить, что контакт оператора с сенсорным покрытием может быть и намеренным, например, когда сам оператор хочет остановить работу робота.
Тот факт, что блок 15 управления способен идентифицировать сенсорный модуль, от которого поступают сигналы контакта и/или приближения, позволяет использовать стратегии управления, направленные на повышение безопасности человека-оператора, в частности для координации движения множества частей подвижной конструкции 2. Например, рассмотрим фиг. 2 и предположим, например, что контакт обнаружен посредством модуля 39, когда предплечье (7, фиг. 1) манипулятора 1 находится в положении наклона вниз. Возможная стратегия управления может в это случае предусматривать, что блок 15 управления приводит в действие как поднятие вышеупомянутого предплечья, так и одновременное колебание назад (как показано на фиг. 1) руки 5. Очевидно, что это только неограничивающий пример, поскольку бесчисленны возможные комбинации движения.
Разумеется, что в одном или более вариантов осуществления блок 15 управления может быть конфигурирован, посредством соответствующего программирования, для использования сенсорных покрывающих модулей в качестве своего рода пользовательского интерфейса, направленного на обеспечение возможности человеку-человеку подавать основные инструкции на блок 15 управления.
Как уже указано, единичный контакт с сенсорным модулем может рассматриваться как показатель ситуации, потенциально опасной для человека-оператора, за которым следует реализация стратегий безопасности. С другой стороны, например, три контакта с сенсорным модулем, происходящие в быстрой последовательности (которые оператор может совершать даже лишь пальцем одной руки), могут указывать на желание оператора временно остановить манипулятор, без необходимости для робота реализовать какую-либо стратегию безопасности. Исходя из этого условия управляемой приостановки, следующая последовательность контактов с модулем - например, два или четыре контакта в быстрой последовательности - может указывать на намерение оператора возобновить работу манипулятора.
В различных вариантах осуществления смежные сенсорные покрывающие модули 20 не имеют механических соединительных средств и электрических соединительных средств упомянутого выше типа. В общем случае это относится к модулям, которые, хотя и расположены довольно близко друг к другу, покрывают части манипулятора 1, способные к относительному перемещению.
Из фиг. 2 понятно, например, что модуль 23, с одной стороны, и модуль 28 (или 29), с другой стороны, соответственно частично покрывают колонну 4 и рычаг 5 манипулятора 1 (см. фиг. 1), т.е. те части манипулятора, которые способны выполнять относительные перемещения. Между этими модулями 23 и 28 отсутствуют соединительные средства взаимного соединения, как механические, так и электрические. Если необходимо, электрическое соединение может быть получено с использованием гибких кабелей, проходящих между данными модулями, задействуя уже упомянутые свободные пространства вмещения, образуемые оболочечной формой конструкций 40 самих модулей; эти пространства также достаточно широки, чтобы обеспечить движение вышеупомянутых кабелей в результате перемещений подвижных частей 4 и 5. Разумеется, что подобные соображения применимы и к другим модулям сенсорного покрытия 20, например - как показано на фиг. 2 - к модулям 23 или 25 и 29, модулям 29 и 30, к модулям 38-39 с одной стороны и к модулям 36-37 с другой, или опять же к модулям 30, 31, 34, 35 с одной стороны и к модулям 36-37 с другой (модули 36-37 зафиксированы относительно предплечья 7 и, таким образом, способны поворачиваться с ним относительно модулей 30, 31, 34, 35, покрывающих локоть 6 с фиг. 1).
Как упомянуто выше, в предпочтительных вариантах осуществления по меньшей мере сенсорные модули покрытия 20 содержат множество активных слоев и пассивных слоев, поддерживаемых несущей конструкцией 40.
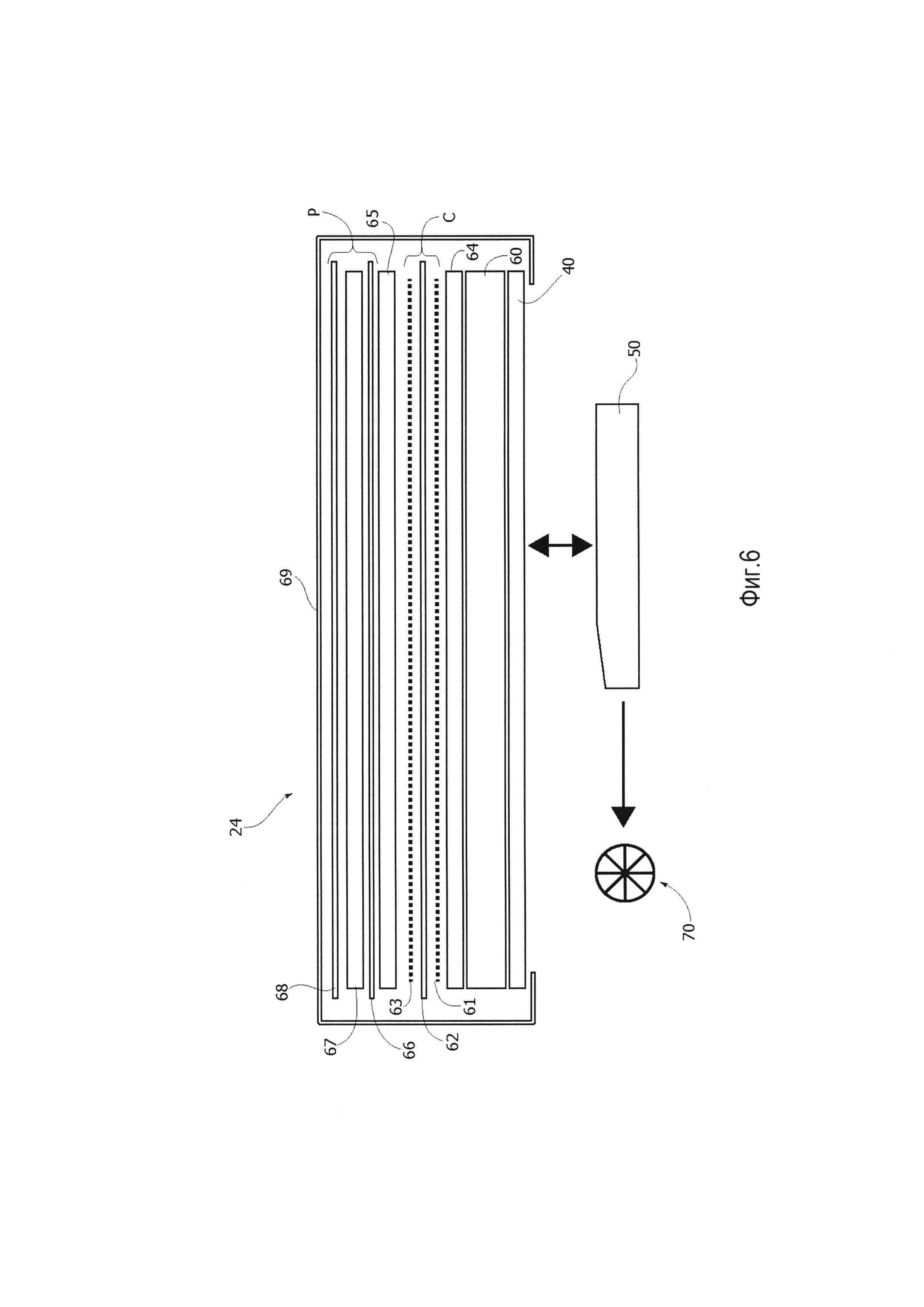
На фиг. 6 лишь в качестве неограничивающего пояснения показана возможная слоистая конструкция сенсорного модуля, в качестве которого в данном случае подразумевается модуль 24 с фиг. 4 и 5. Для большей ясности на этой фигуре опущено изображение проводки электрического соединения.
В предпочтительных вариантах осуществления с внешней стороной поддерживающей конструкции 40 покрывающего модуля связан смягчающий слой из упругодеформируемого материала, выполненный с возможностью поглощения кинетической энергии, возникающей от удара по данному модулю. Этот смягчающий слой, обозначенный цифрой 60 в примере с фиг. 6, может быть выполнен из пенополимера, например вспененного полиуретана. Слой 60 может иметь толщину от 5 до 10 мм, предпочтительно приблизительно 6-8 мм.
Предпочтительно смягчающий слой 60 выполнен с возможностью поглощения кинетической энергии, не превышающей вышеупомянутого безопасного порогового значения, соответствующего слому или повреждению несущей конструкции 40. Соответственно, исходя из того, что уже рассмотрено в отношении конструкции 40, смягчающий слой 60 может, например, выполняться с возможностью поглощения удара с кинетической энергией меньше 60 Н⋅м или 100 Н⋅м, или 150 Н⋅м, или 200 Н⋅м, в соответствии с требуемой степенью безопасности.
В одном или более вариантов осуществления поверх смягчающего слоя 60 сенсорного модуля находятся контактные сенсорные средства. В общем случае контактные сенсорные средства могут относиться к любому известному типу.
В предпочтительных вариантах осуществления изобретения контактные сенсорные средства относятся к гибкому типу и расположены так, что проходят по зоне, по существу соответствующей зоне внешней поверхности соответствующего модуля или ее преобладающей части. В неограничивающем примере с фиг. 6 эти контактные сенсорные средства обозначены в целом буквой С и имеют сами конструкцию, образованную слоями, установленными поверх друг друга.
В одном или более вариантов осуществления контактные сенсорные средства содержат пьезорезистивный слой 62, установленный между нижним электропроводящим слоем 61 и верхним электропроводящим слоем 63. Предпочтительно пьезорезистивный слой 62 содержит ткань из пьезорезистивного материала или материала, которому придана пьезорезистивность, например, ткань из синтетического изоляционного материала (такого как нейлон и/или спандекс), покрытого проводящим полимером. Пьезоэлектрические ткани этого типа изготавливаются, например, фирмой Eeonyx Corporation, США. Слои 61 и 63 предпочтительно содержат ткань из электропроводящего материала или материала, которому придана электропроводность, такую как, например, металлическая ткань. Проводящие ткани этого типа изготавливаются, например, Техе S.r.l., Италия, с товарным знаком INNTEX.
Слои или ткани 61-63 очень тонки (например, общая толщина слоев 61-63, установленных поверх друг друга, не превышает 5 мм, предпочтительно 2,5-3,5 мм), поэтому им присуща гибкость.
При эксплуатации между проводящими слоями 61 и 63 прикладывается разность потенциалов, и электрическое сопротивление пьезорезистивного слоя 62 измеряется с помощью соответствующих компонентов, расположенных на соответствующей плате 50 управления. При наличии давления, приложенного к слоям 61-63, локальное сопротивление пьезорезистивного слоя изменяется, например, уменьшается, и это изменение можно детектировать с помощью вышеупомянутых компонентов платы 50.
Контакт между двумя проводящими слоями 61, 63 является особым условием, соответствующим сопротивлению промежуточного пьезоэлектрического слоя 0 Ом, при котором создается ложное срабатывание сенсора С. По этой причине в различных вариантах осуществления пьезорезистивный слой 62 имеет периметрические размеры больше периметрических размеров проводящих слоев 61 и 63, так что периферийная часть слоя 62 выступает по периферии за пределы слоев 61 и 62. Такая конфигурация приводит к наличию своего рода нечувствительной рамки, окружающей чувствительную часть сенсора: наличие выступающей периферийной части слоя 62 предотвращает непосредственный контакт между слоями 61, 62 и, таким образом, предотвращает короткие замыкания, которые могли бы вызвать ложные срабатывания.
В предпочтительных вариантах осуществления контактные сенсорные средства сенсорного покрывающего модуля установлены между нижним слоем покрытия и верхним слоем покрытия, которые выполнены из упругодеформируемого и электроизоляционного материала. В соответствии с неограничивающим примером с фиг. 6 цифрами 64 и 65 обозначены вышеупомянутые верхний и нижний слои покрытия, соответственно, между которыми установлены контактные сенсорные средства С. Слои 64 и 65 могут быть выполнены из пенополимера, предпочтительно из пенополимера с закрытыми порами. Предпочтительно слои 64 и 65 имеют толщину меньше 4 мм, предпочтительно 1,5-2,5 мм.
Когда к верхнему покрытию 65 приложен заряд, например, после соударения между покрывающим модулем и человеком-оператором, пластичный материал слоев 64 и 65 подвергается деформации, создавая, таким образом, давление на активных слоях 61-63 и, тем самым, активируя сенсорные контактные средства С, как объяснено выше. Внутренняя структура пенополимера, используемого для изготовления слоев 64 и 65, позволяет, таким образом, практически полностью передавать усилия на сенсорные средства С, установленные между ними, поглощая лишь незначительное количество энергии.
Как можно заметить, в примере с фиг. 6 нижний слой 64 покрытия установлен поверх смягчающего слоя 60.
Чувствительность сенсорных средств С зависит, конечно, от различных аспектов и свойств выбранных слоев 61-63 и соответствующих слоев 64-65 покрытия (таких как электрическое сопротивление пьезоэлектрического слоя или ткани 62, упругость слоя или ткани 62, и слоев или тканей 61, 62, тип материала слоев 64, 65 покрытия, его плотность и сжимаемость, толщина слоев 64, 65 покрытия и положение сенсорных средств С внутри слоистой конструкции покрывающего модуля). Для этой цели желаемая калибровка сенсорных средств С может выполняться на этапе проектирования и на основе экспериментальных тестов в соответствии с выбранным типом реализации (формы, материалы, толщины и т.д.).
Следует учесть, что контактные сенсорные средства С упомянутого типа также подходят для выполнения функций сенсоров усилия, учитывая, что чем больше прикладываемое давление (на внешней стороне покрывающего модуля), тем больше отличается обнаруженное значение сопротивления (например, меньше). Исходя из этого, блок 15 управления может быть выполнен с возможностью интерпретации сильной и продолжительного усилия в течение несколько секунд (например, 2-3 секунды) в качестве команды на перемещение манипулятора в направлении, противоположном тому, откуда исходит усилие. Таким образом, оператор может создать своей рукой такое усилие на сенсорном покрывающем модуле, которое вызовет перемещение манипулятора в противоположном направлении, до тех пор пока сохраняется усилие.
Как уже указано, в одном или более вариантов осуществления один или более сенсорных модулей содержат сенсорные средства приближения. Когда сенсорный модуль содержит как контактные сенсорные средства, так и сенсорные средства приближения, последние расположены выше, чем первые, т.е. в более внешнем положении по отношению к конструкции 40, которая представляет собой самый внутренний слой покрывающего модуля. В случае же сенсорных модулей, содержащих только сенсорные средства приближения, слои 61-64 и, возможно, 65 с фиг. 6 могут быть исключены, возможно, с соответствующим увеличением толщины смягчающего слоя 60.
Сенсорные средства приближения могут относиться к любому известному типу, однако предпочтительно они относятся к гибкому типу и выполнены так, чтобы иметь зону поверхности, по существу соответствующую зоне внешней поверхности модуля или его преобладающей части. В неограничивающем примере на фиг. 6 эти сенсорные средства приближения обозначены в целом буквой Р и сами имеют конструкцию, образованную слоями, установленными поверх друг друга.
В одном или более вариантов осуществления сенсорные средства приближения относятся к емкостному типу и содержат первый слой и второй слой электропроводящего материала, между которыми установлен по меньшей мере один слой электроизоляционного материала. В неограничивающем примере с фиг. 6 номерами позиции 66 и 68 обозначены вышеупомянутые первый и второй проводящие слои, а цифрой 67 - вышеупомянутый промежуточный изоляционный слой, причем верхний слой 68 является чувствительным слоем для целей обнаружения приближения.
Предпочтительно, каждый из проводящих слоев 66 и 68 содержит ткань из электропроводящего материала или материала, которому придана электропроводность, например, из полиэфирной ткани, покрытой слоем меди и поверх никелем. Проводящие ткани этого типа изготавливаются, например, компанией 3М, США. В различных вариантах осуществления промежуточный слой 67 предпочтительно выполнен из упругодеформируемого материала, например, из пенополимера, предпочтительно пенополимера с закрытыми ячейками.
Как можно заметить, в примере с фиг. 6 первый электропроводящий слой 66 установлен поверх верхнего слоя 65 покрытия.
В возможном практическом варианте осуществления сенсорные средства Р приближения содержат проводящий слой 68, используемый в качестве емкостного сенсора и соединенный с емкостной чувствительной микросхемой на основе индуктивно-емкостной цепи (LC-цепи, такой как микросхема FDC2214 производства Texas Instrument Incorporated, США), расположенной на плате 50 управления для сбора и обработки данных (см. справочные данные упомянутой выше микросхемы и соответствующие указания по применению). В принципе, когда человек-оператор (или другое инородное тело) приближается к проводящему слою 68, происходит изменение емкости в LC-модуле и последующее изменение частоты колебаний. Измерение этого изменения частоты, выполняемое микросхемой, отображает, таким образом, близость человека-оператора (или другого инородного тела) к слою 68, т.е. к внешней стороне сенсорного покрытия. Как упомянуто выше, сенсорные средства Р могут быть конфигурированы так, что максимальное расстояние от слоя 68, в пределах которого может быть обнаружено присутствие инородного тела, составляет приблизительно 15-20 см.
Проводящий слой 66, установленный под чувствительным слоем 68, работает по существу как экран, предотвращающий ложные обнаружения, например, из-за движений предметов, находящихся вне внутренней стороны несущей конструкции 40 (например, проводка, которая смещается следуя движению манипулятора), что может уменьшить чувствительность слоя 68 относительно противоположной стороны покрывающего модуля, представляющей фактический интерес. Нижний проводящий слой 66 может быть использован в качестве пассивного экрана или активного экрана в соответствии с типом соединения, реализованного на плате 50. Как уже указано, чувствительный слой 68 и слой 66 экрана сенсорных средств Р отделены от друг от друга слоем 67.
Наконец, каждый модуль предпочтительно содержит внешний покровный слой, который может быть выполнен, например, из технической ткани или синтетической кожи. В неограничивающем примере с фиг. 6 покровный слой обозначен цифрой 69. Слой 69 обладает, в частности, функцией изоляции сенсорных средств Р от внешней части покрывающего модуля, предотвращая непосредственный контакт проводящего слоя 68 с людьми или предметами.
В случае сенсорных модулей, в которых слой 69 покрытия установлен поверх второго электропроводящего слоя 68 сенсорных средств Р приближения, предпочтительно, чтобы вышеупомянутый покровный слой был выполнен из электроизоляционного материала. В случае же сенсорных модулей, содержащих только контактные сенсорные средства С, покровный слой 69 может быть установлен поверх верхнего слоя 65 покрытия, который сам по себе уже является электроизоляционным, или же при отсутствии последнего, на проводящем слое 63. Покровный слой 69 может иметь толщину, составляющую от 0,5 до 1,5 мм, хотя не исключена большая его толщина при условии обеспечения гибкости или возможности упругой деформации этого слоя.
В различных вариантах осуществления, таких как пример с фиг. 6, покровный слой 69 также проходит по периферийным сторонам конструкции, образованной слоями 40, 60-68, и прикреплен к несущей конструкции 40, например, к ее внутренней стороне и/или стенкам типа, обозначенного цифрами 42-43 на фиг. 4-5. Однако это не является существенной характеристикой. По факту покровный слой может быть сформирован подходящей краской, предпочтительно электрически непроводящей краской.
На фиг. 6 также схематично изображена плата 50 управления модуля 24, а также средства принудительной вентиляции, обозначенные цифрой 70, например вентилятор с электрическим двигателем.
В различных вариантах осуществления один или более вентиляторов 70 могут быть установлены на частях конструкции манипулятора 1, покрытого покрытием 20, причем эти части снабжены подходящими опорами, предназначенными для этой цели. С другой стороны, согласно предпочтительным вариантам осуществления вентиляторы установлены на внутренней части конструкции 40 одного или более модулей, необязательно сенсорных. Наличие средств принудительной вентиляции способствует циркуляции воздуха внутри полости, образованной покрытием 20, например, для облегчения охлаждения компонентов, заключенных внутри покрытия (таких как платы 50 или двигатели М сочленений манипулятора 1). Для обеспечения возможности циркуляции охлаждающего воздуха (т.е. поступления воздуха извне и выталкивания более горячего воздуха наружу) один или более покрывающих модулей 20 могут снабжаться проходами, например, в виде серии прорезей, которые схематически показаны пунктирной линией на фиг. 2.
Работа вентиляционных средств 70 может управляться платой 50 управления сенсорного модуля (не обязательно того же, на котором установлен вентилятор). Для этой цели в возможных вариантах осуществления такая плата 50 предпочтительно имеет сенсор температуры (например, типа NTC (отрицательный температурный коэффициент), чтобы активировать вентиляционные средства, когда температура воздуха, детектированная в пределах зоны, ограниченной покрытием 20, достигает или превышает заданное пороговое значение.
В различных вариантах осуществления для целей изготовления сенсорного модуля, такого как модуль 24 с фиг. 6, различные слои собирают с использованием адгезивов, способных обеспечить сцепление слоев друг на друге и предотвратить любое возможное их скольжение после контакта или удара.
Как упомянуто выше, базовый слой, представленный несущей конструкцией 40, получают в виде, определенном на стадии проектирования, при этом его форма может меняться в зависимости от зоны подлежащего покрытию манипулятора. Конструкция 40 предпочтительно выполняется из жесткого или полужесткого пластикового материала инжекционным формированием или термоформованием, или другим подходящим способом.
Затем смягчающий слой 60 устанавливается на соответствующую несущую нагрузку конструкцию 40 и крепится к ней посредством адгезива. Для этой цели слой 60 получают с такими формой и размером, чтобы воспроизвести по меньшей мере форму и размер внешней стороны несущей конструкции 40 и покрыть ее целиком или практически целиком. Слой 60 может, например, быть вырезан или вырублен из листа используемого материала. При этом активные слои 61-63 и слои 64, 65 покрытия получают в необходимых формах и размерах, например, посредством разрезания или вырубки (как упомянуто выше, предпочтительно, чтобы пьезорезистивный слой 62 имел ширину больше проводящих слоев 61, 63), затем выполняют их склеивание. Слой 64 покрытия наклеивают на смягчающий слой 60, затем на него последовательно наклеивают слои 61-63, затем на слой 63 наклеивают слой 65 покрытия. Слои 61-65 собирают вместе в показанном порядке, предпочтительно с использованием одного или более клеев, имеющих уменьшенную адгезионную способность, или в любом случае адгезионную способность меньше адгезионной способности клея или клеев, используемых для прикрепления слоя 60 к конструкции 40, причем задача заключается не в изменении упругости чувствительных слоев 61-63, но в получении при этом стабильного сенсора. Разумеется, нанесение клеев между слоями 61-63 выполняется так, чтобы не изолировать электрически указанные слои друг от друга.
Далее получают также дополнительные активные слои 66, 68 и соответствующий промежуточный пассивный слой 67 с необходимыми формами и размерами, так чтобы покрыть зону, по существу соответствующую внешней поверхности покрывающего модуля или ее преобладающей части. Что касается предыдущих слоев, то и в этом случае можно использовать способы резания или вырубки, начиная с больших листов исходных материалов.
Слои 66-68 затем последовательно наклеивают на слой 65, в этом случае также предпочтительно с использованием клеев с уменьшенными характеристиками адгезии по причинам, описанным выше в отношении слоев 61-65.
Наконец, наносят внешний слой 69 покрытия, который также может быть наклеен на нижележащей слоистой конструкции или, как упомянуто, нанесен в виде краски.
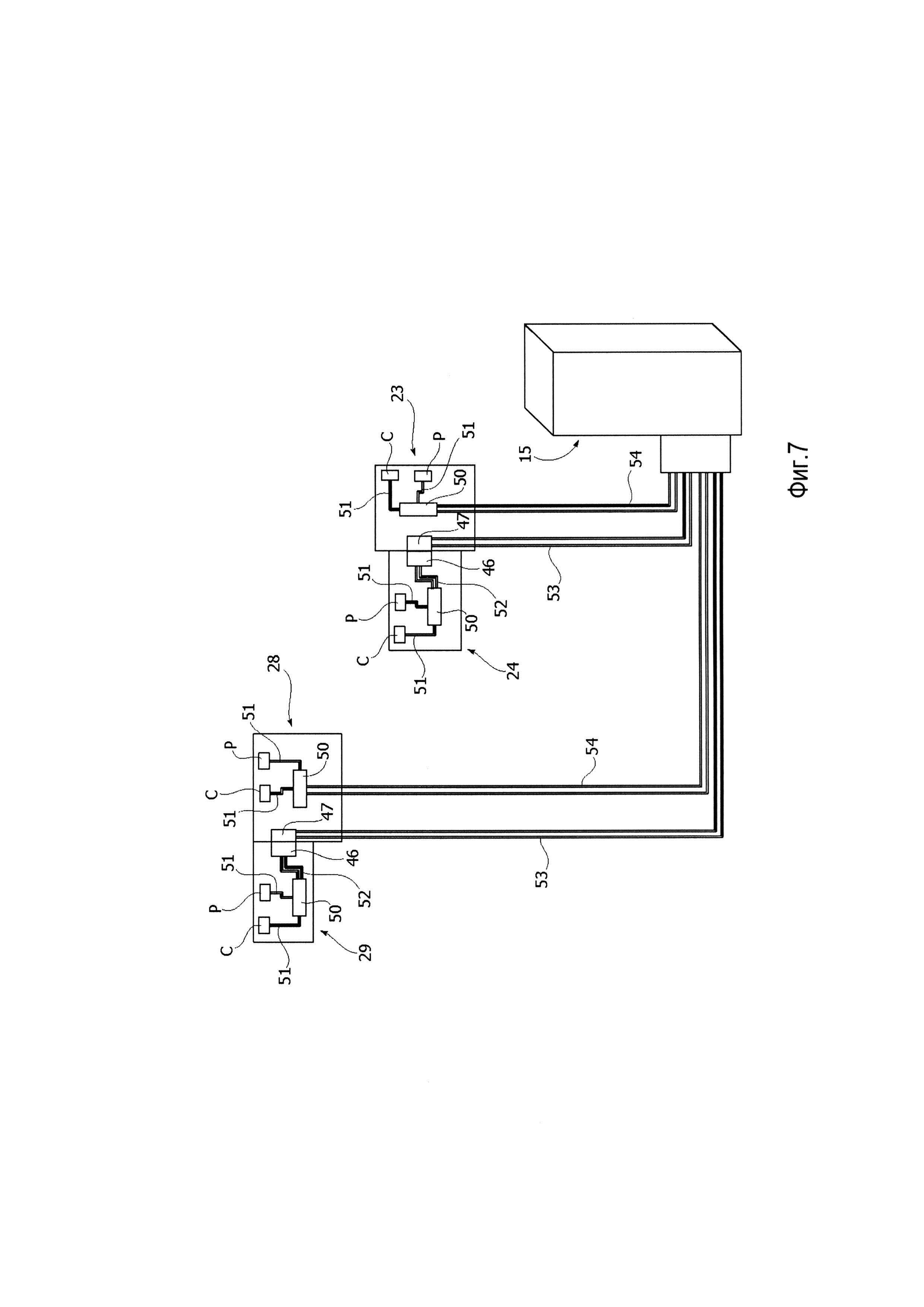
На фиг. 7 схематично показан возможный способ соединения некоторых сенсорных модулей, таких как, например, модули 23-24 с фиг. 4-5 и модули 28-29 с фиг. 2. Как упомянуто выше, в вариантах осуществления этого типа имеются наборы проводок 53, 54, которые соединяют платы 50 управления различных модулей с блоком 15 управления, причем эти наборы проводок включают в себя проводники для подачи электрического питания от блока 15 к платам 20 и передачи сигналов от плат 50 к блоку 15, отображающих результаты обнаружения, выполненного сенсорными средствами С и/или Р, при этом проводка 53 использует наличие проводки 52 и электрических соединительных средств 46-47 соединенных модулей.
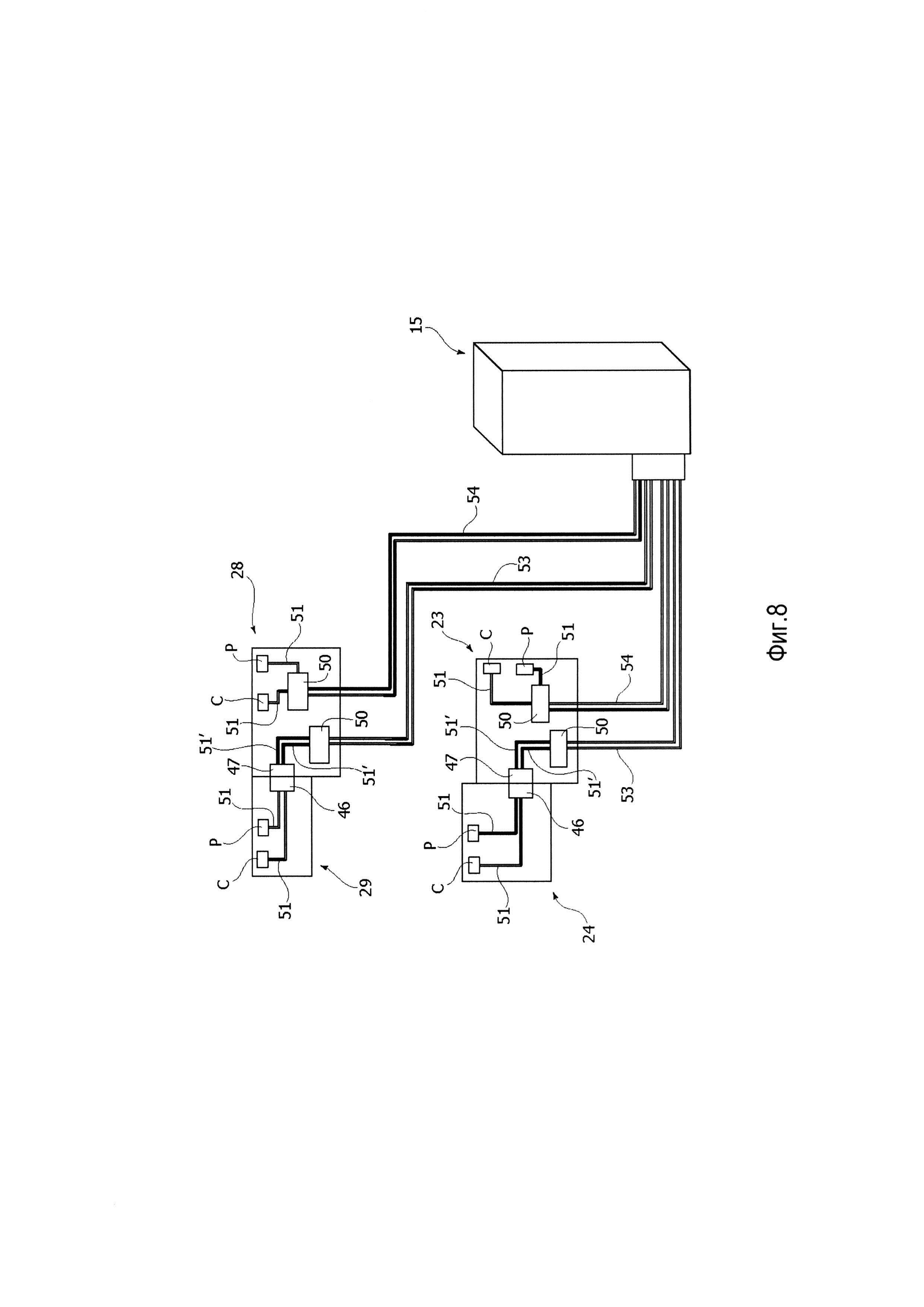
Разумеется, что конфигурации электрического подсоединения покрывающих модулей к блоку 15 управления могут быть самыми различными в зависимости от принятого конструктивного подхода. Например, на фиг. 8 схематично показан случай, упомянутый выше в отношении модулей - здесь на примере модулей 23 и 28, - связанных с несущими конструкциями, из которых две являются платами 50 управления, одна соединена с возможностью обмена сигналами с сенсорными средствами С и/или Р соответствующего модуля 23 или 28, а к остальным подсоединены наборы проводки 51' для соединения с сенсорными средствами С и/или Р смежных модулей 24 и 29, соответственно. В этом случае используются электрические соединительные средства 46-47 для соединения вместе наборов проводки 51', предусмотренных на модулях 23 и 28, с наборами проводки 51, предусмотренным на модулях 24 и 29.
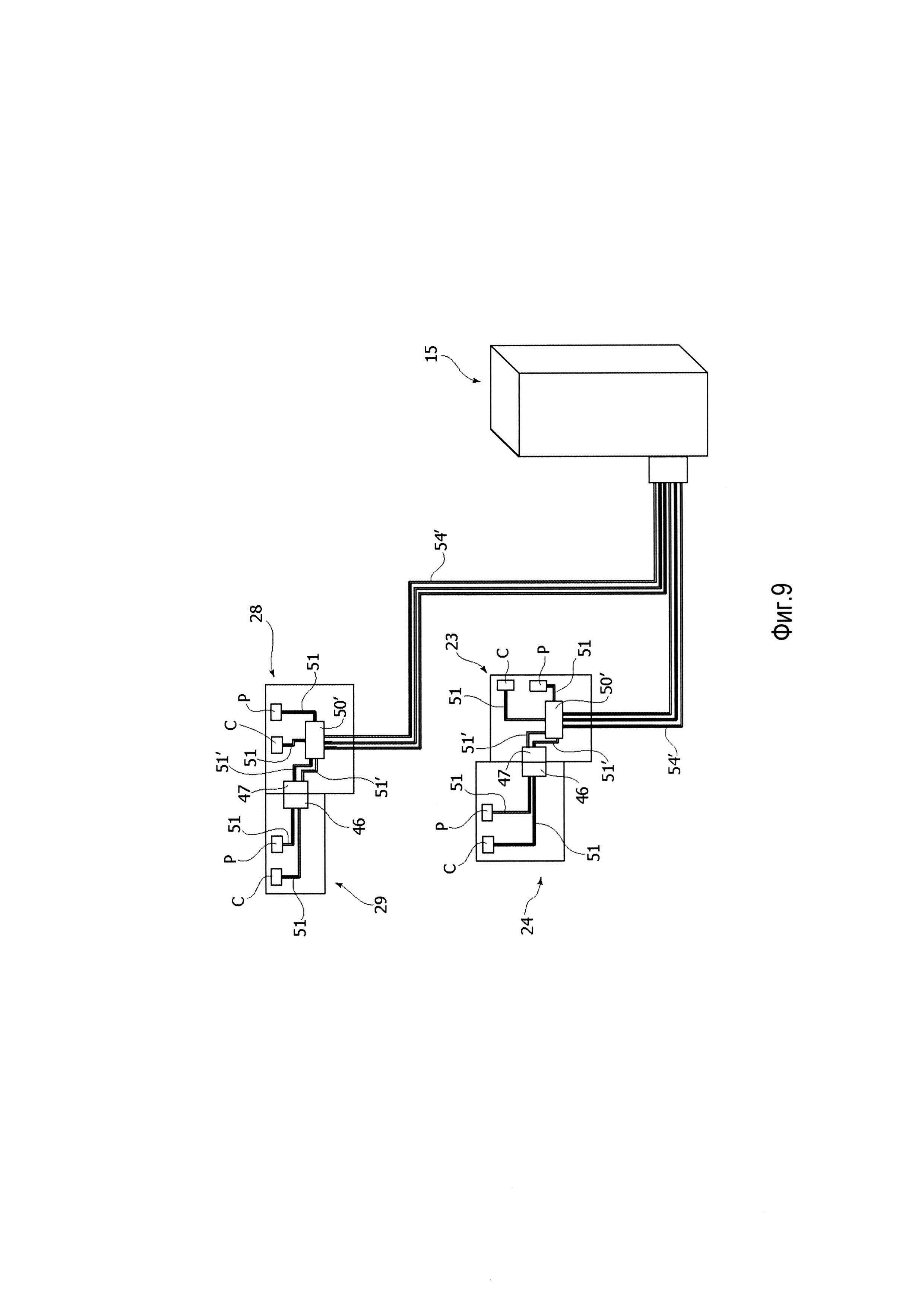
На фиг. 9 показан уже случай плат 50', выполненных с возможностью подсоединения к множеству сенсорных средств С и/или сенсорных средств Р. В этом примере платы 50' связаны с несущими конструкциями модулей 23 и 28 и подсоединены как к соответствующим сенсорам С и/или Р посредством наборов проводки 51, так и к сенсорам С и/или Р модулей 24 и 29 посредством наборов проводки 51' на модулях 23 и 28 и наборов проводки 51 на модулях 24 и 29. В этом случае также используются электрические соединительные средства 46-47 смежных модулей 23-24 и 28-29 для соединения вместе наборов проводки 51' и наборов проводки 51 соединенных вместе модулей. В решениях этого типа предусмотрены в этом случае наборы проводки 54', проходящей только между блоком 15 и модулями 23, 28 (т.е. соответствующими платами 50') для электрического питания и передачи сигналов, генерируемых с помощью сенсорных средств С и/или Р всех показанных модулей.
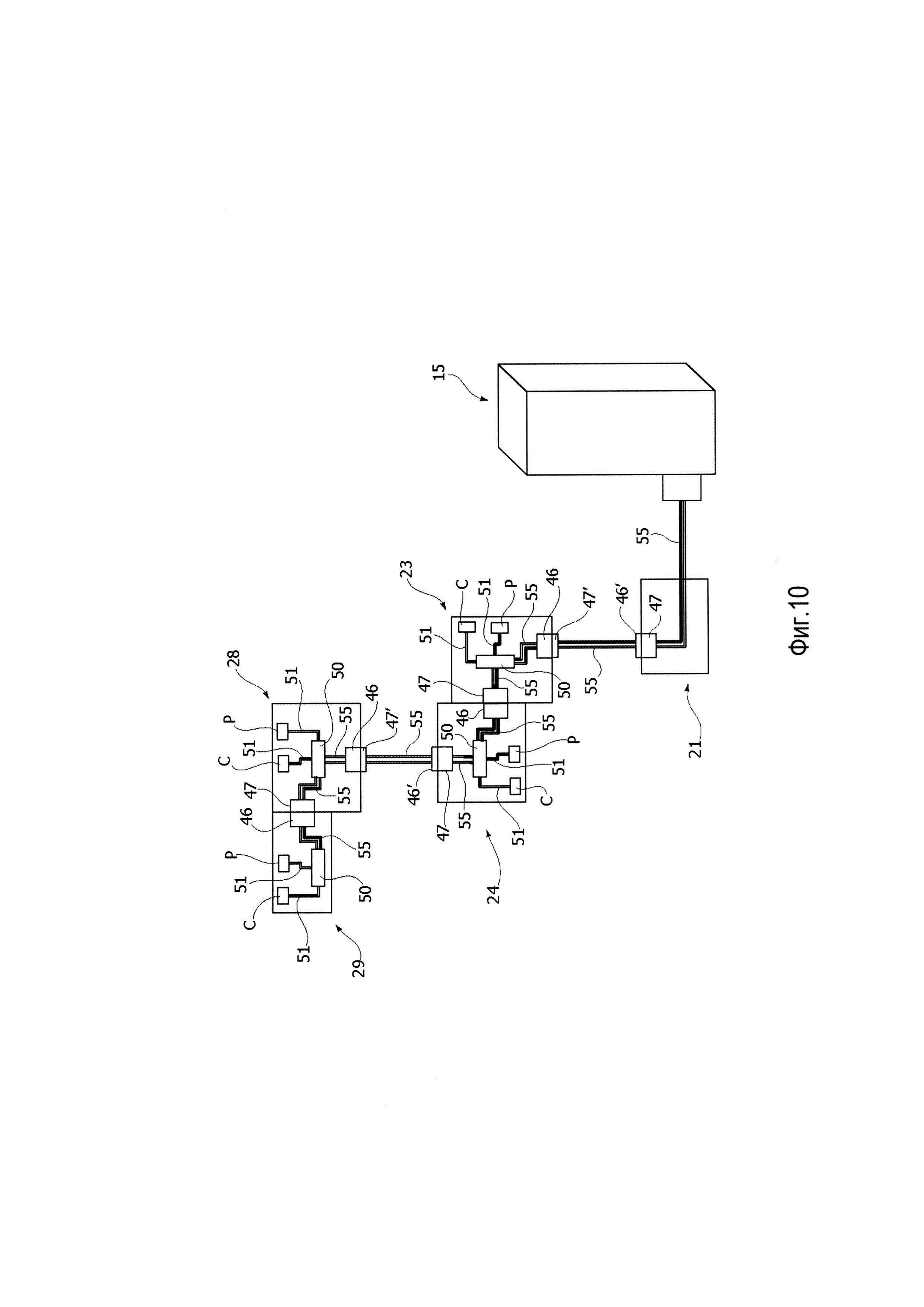
На фиг. 10 приведен пример последовательного соединения между платами 50 различных сенсорных модулей и блоком 15 управления, по существу в соответствии с архитектурой гирляндного типа. В этом случае по существу используется проводка 55, содержащая проводники для подачи электрического питания на плату 50 различных модулей 23, 24, 28, 28 и проводники для передачи данных, отображающих результаты обнаружения, выполненного посредством сенсоров С и/или Р различных соединенных модулей. Платы 50 могут предпочтительно включать в себя соответствующие коммуникационные узлы для передачи вышеупомянутых данных в соответствии с подходящим стандартным или собственным протоколом.
В данном примере проводка 55 разделена на отрезки, некоторые из которых находятся на различных модулях, между каждой платой и соответствующими электрическими соединительными средствами 46 или 47, а также на вторые отрезки для соединения вместе несмежных модулей или в любом случае модулей, которые не содержат соединительных средств взаимного соединения (таких как модули 24 и 28). Вторые отрезки предпочтительно могут иметь на своих концах электрические соединительные средства 46', 47', дополняющие электрические соединительные средства 46 и 47 модулей, подлежащих соединению. Таким образом, предусмотрено, что в одном или более вариантах осуществления модули могут также содержать множество электрических соединительных средств 46, 47.
На фиг. 10 также показан случай модулей - таких как модуль, обозначенный цифрой 21, - которые, хотя они и не снабжены сенсорами С и/или Р, в любом случае имеют электрические соединительные средства.
Следует отметить, что в различных вариантах осуществления конфигурация сети, используемой для соединения вместе блока 15 управления и множества модулей, может отличаться от той, что показана на фиг. 10, например, использованием шинной архитектуры, кольцевой архитектуры, звездчатой архитектуры и т.д.
Следует отметить, что в вариантах осуществления с последовательным соединением типа того, что приведен в качестве примера на фиг. 10, удаление модуля, определяющего расстояние между двумя соединительными средствами 46-47, приводит к нарушению сенсорных функций всего покрытия 20. Это может быть удобно в некоторых случаях применения из соображений безопасности. В других же случаях вместо этого могут использоваться другие архитектуры соединения, например шинная архитектура или звездчатая архитектура (по существу, как показано на фиг. 7-9), чтобы гарантировать работу покрытия и в случае удаления одного или более модулей, содержащих электрические соединительные средства.
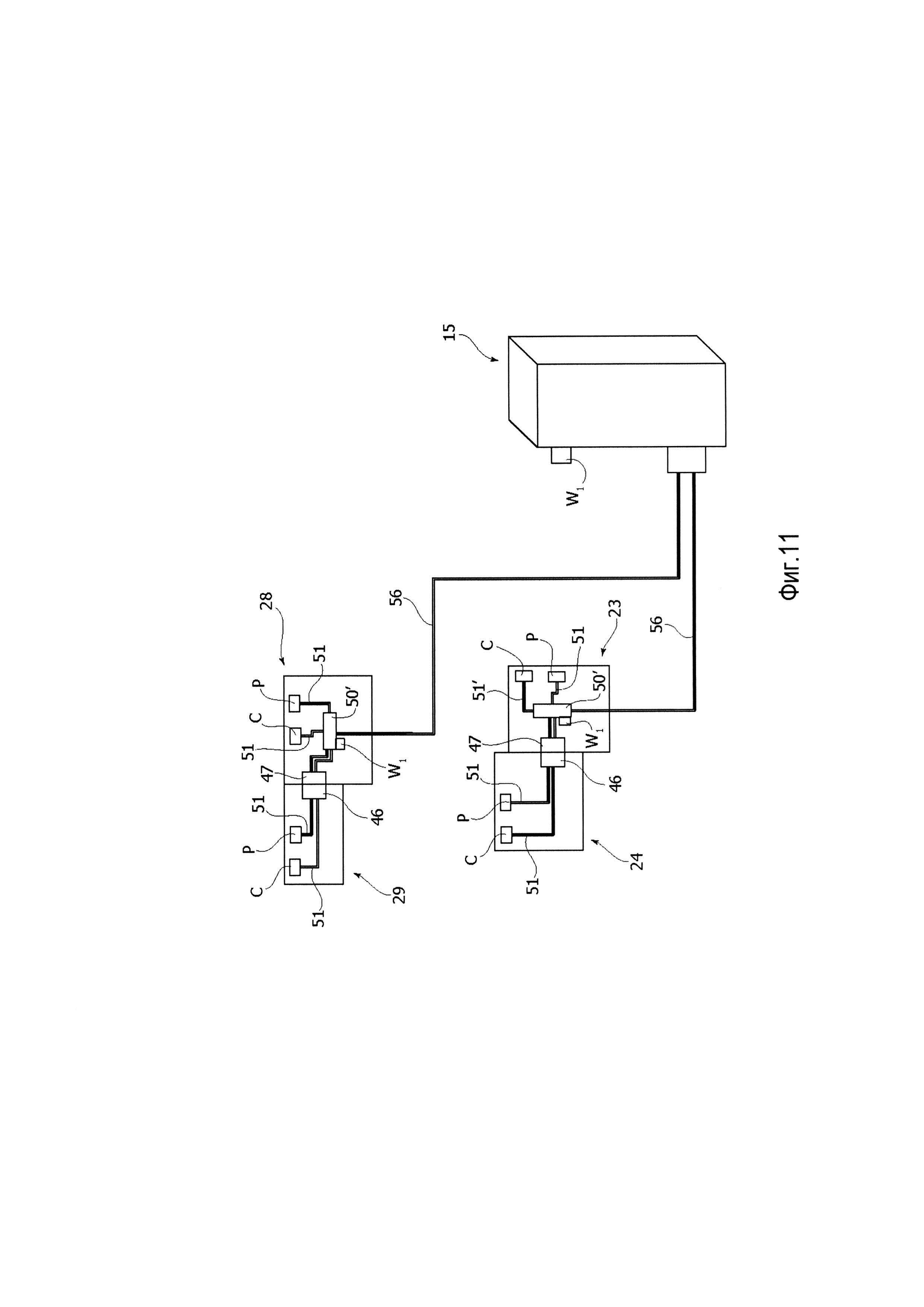
На фиг. 11 приведен примера, сходный с тем, что показан на фиг. 10, т.е. платы 50' управления, конфигурированные для управления сигналами сенсорных средств С и/или Р, соответствующих нескольким модулям, разные, но соединены между собой посредством электрических соединительных средств 46 и 47. Эти платы 50' дополнительно снабжены модулем беспроводной связи, который обозначен как W1, для передачи в радиочастотном диапазоне по меньшей мере сигналов, соответствующих результатам обнаружения, выполненного соединенными сенсорными средствами. Для этой цели блок 15 управления снабжен соответствующим модулем W2 беспроводной связи.
Для целей беспроводной передачи данных может использоваться стандарт связи, который считается наиболее эффективным для данного применения (WiFi, Bluetooth, ZigBee и т.д.). Сходным образом, передача данных может осуществляться в соответствии с подходящим стандартным или собственным протоколом. Наборы проводки 56 между блоком 15 управления и модулями 23, 28 могут использоваться для электрического питания плат 50' управления со связанными модулями W1 связи, которые могут, если это необходимо, также относиться к типу, который способен управлять двунаправленной связью.
Очевидно, что реализация беспроводной передачи данных применима и к случаям, приведенным в качестве примера на фиг. 7 и 8, в этом случае наборы проводок 53 и 54 могут включать в себя только проводники для электрического питания плат 50.
Изложенные выше концепции, касающиеся конструкции, работы и соединения сенсорных покрывающих модулей, применимы к автоматизированным устройствам, имеющим одну или более подвижных частей, которые могут даже отличаться от манипулятора промышленного робота.
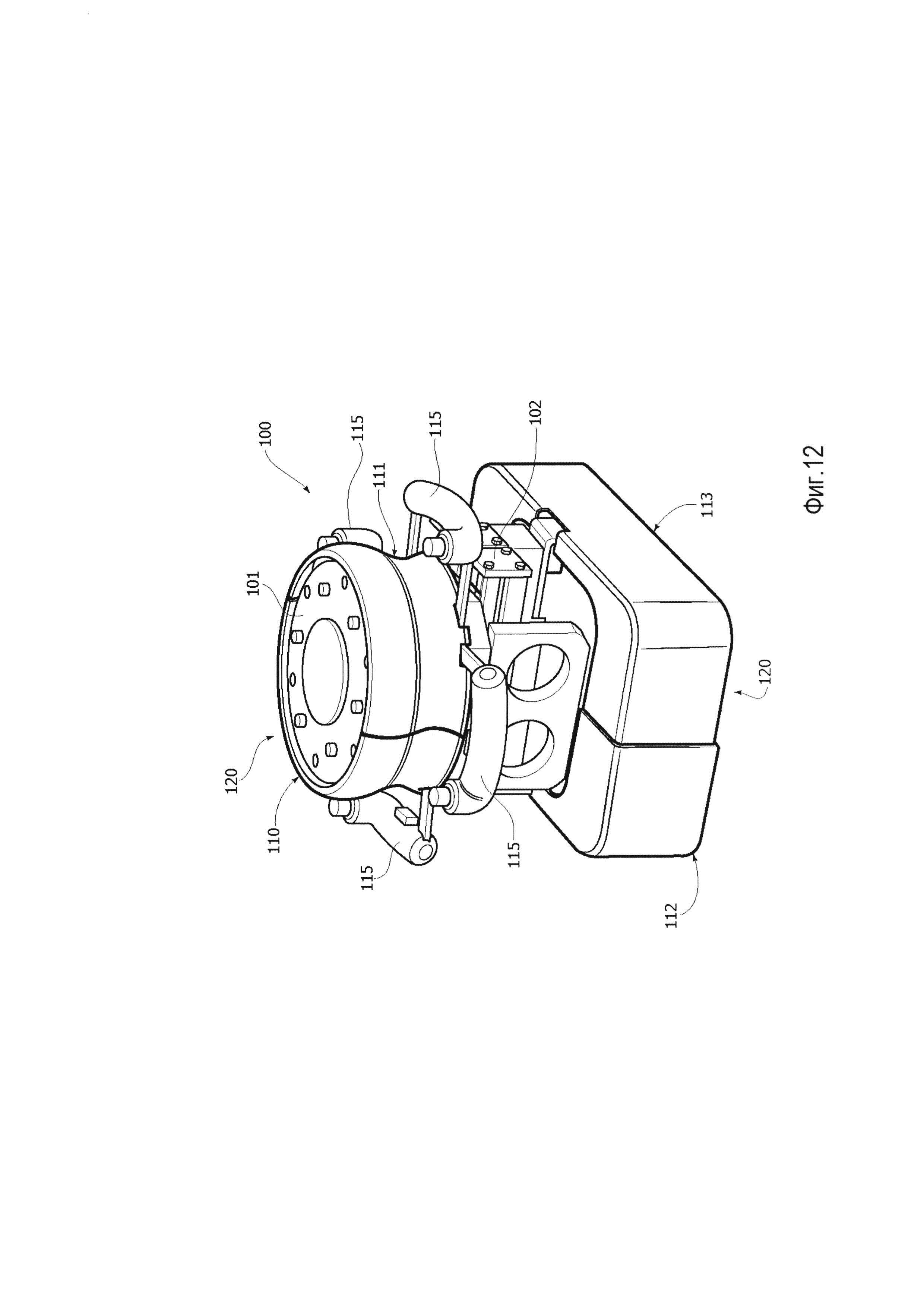
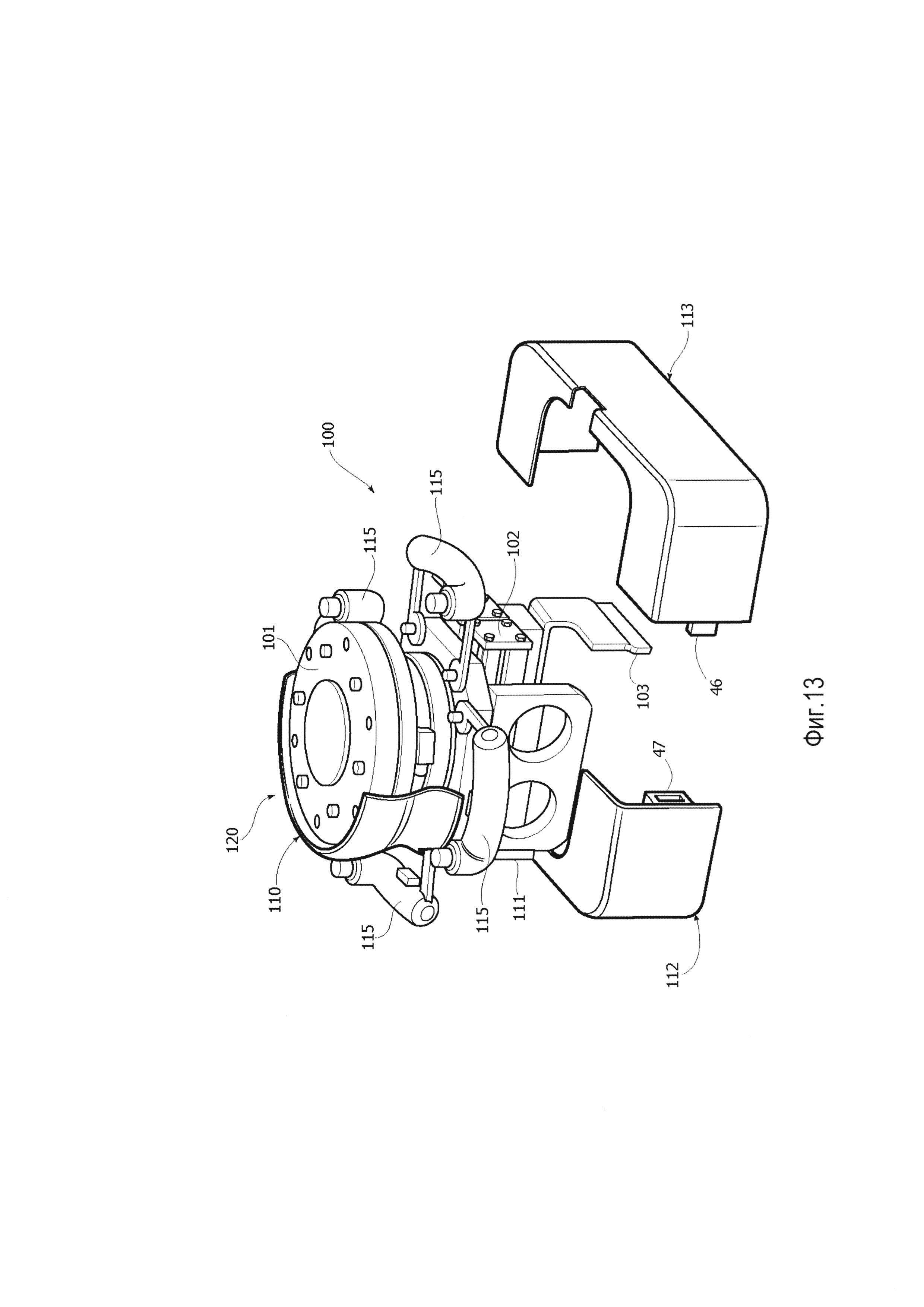
Например, сенсорное покрытие описанного выше типа - хотя бы и с модулями, имеющими формы, отличные от тех, что показаны на фиг. 2-5 - предпочтительно может использоваться для частичного покрытия рабочих инструментов робота или рабочих органов. Пример этого приведен на фиг. 12, где цифрой 100 в целом обозначен захватный инструмент, несущая конструкция 101 которого включает в себя крепежную часть, выполненную - согласно известным способам - для механического соединения и, возможно, силового соединения (например, электрического, пневматического или гидравлического типа) с фланцем 9 манипулятора 1 с фиг. 1-3. С конструкцией 101 связаны подходящие приводные средства, такие как один или более пневматических цилиндров 102, которые могут управляться для обеспечения открытия и закрытия элементов или зажимов - один из которых показан на фиг. 13 и обозначен цифрой 103 - для подхвата заготовки, подлежащей машинной обработке или транспортировке.
Как можно заметить, в показанном схематическом примере с конструкцией 101 связано множество покрывающих модулей 110, 111 и 112, 113, обеспечивающих два сенсорных покрытия 120 для различных зон инструмента 100. В частности, модули 110 и 111 выполнены так, чтобы окружать верхнюю часть инструмента 100 ближе к участку крепления к фланцу манипулятора, в то время как модули 112 и 113 выполнены так, чтобы окружать нижнюю часть инструмента 100, внутри которой могут перемещаться упомянутые выше подхватные элементы 103.
Из фиг. 13 исключено изображение модуля 111, а модуль 113 показан в состоянии отделения от модуля 112. Модули 110-111 и 112-113 снабжены соответствующими электрическими соединительными средствами, которые могут быть соединены вместе в собранном состоянии двух рассматриваемых модулей, причем на фиг. 13 частично видны лишь соединители 46 и 47 модулей 112-113. Эти электрические соединительные средства могут быть конфигурированы также для выполнения функции механического соединения между этими двумя модулями (это применимо, в принципе, также по меньшей мере к некоторым из модулей, описанных со ссылкой на фиг. 1-5). В любом случае в вариантах осуществления типа того, что приведен в качестве примера на фиг. 13 и 14, модули 110-111 и 112-113 могут снабжаться соответствующими разъемными механическими соединительными средствами, в частности быстросъемными, любого известного исполнения, подходящими для конкретного применения.
В различных вариантах осуществления рабочий инструмент робота или другой рабочий орган, конструкция которого покрыта по меньшей мере частично сенсорным покрытием описанного здесь типа, предназначена для использования в тесном взаимодействии с человеком-оператором и содержит для этой цели устройство ручного управления.
Например, на фиг. 12 и 13 показан пример осуществления, в котором такое устройство управления включает в себя множество рукояток 115, к каждой из которых оператор может прикладывать усилие (от себя, на себя, подъем, опускание) в определенном направлении, так чтобы манипулятор 1 осуществлял соответствующие движения, необходимые для выполнения процесса. С ручками 115 связан сенсор усилия, подсоединенный с возможностью обмена сигналами к блоку 15 управления (в проводном или беспроводном режиме), чтобы позволить последнему распознавать направление перемещения, заданное оператором. Предпочтительно с каждой ручкой 115 связана соответствующая нажимная кнопка для контроля за переключением подхватных элементов 103 между соответствующими положениями открытия и закрытия.
В приведенном примере четыре рукоятки 115 расположены на четырех разных сторонах инструмента 100, чтобы человек-оператор мог каждый раз выбирать ту рукоятку, которая представляется наиболее удобной для осуществления операции, которую необходимо выполнить во взаимодействии с роботом.
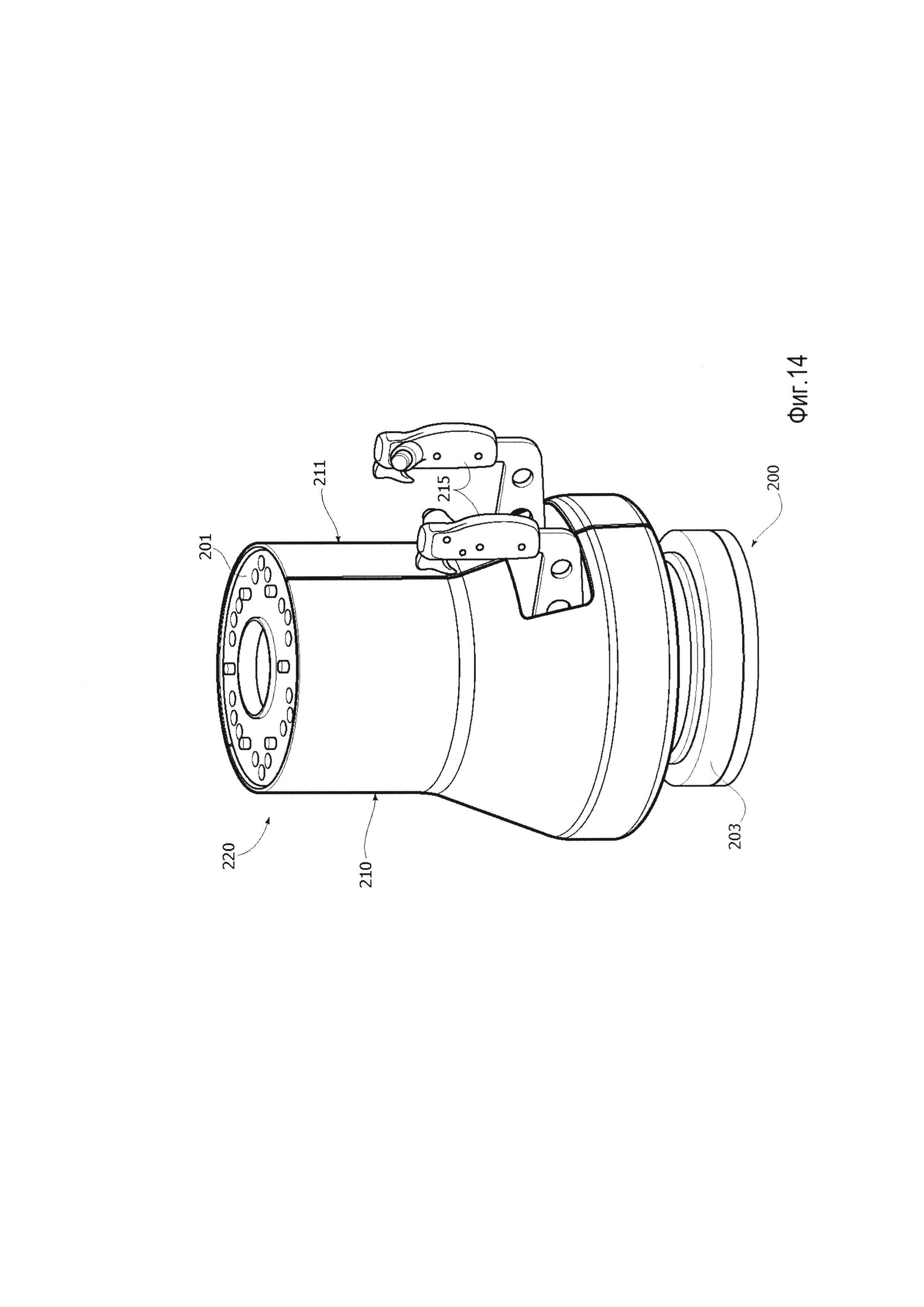
На фиг. 14 и 15 показан пример другого инструмента или рабочего органа, обозначенного в целом цифрой 200, в частности полировальный или шлифовальный инструмент. В этом случае несущая конструкция 201 инструмента 200 также включает в себя крепежную часть, выполненную с возможностью соединения с фланцем 9 манипулятора 1 с фиг. 1-3. С конструкцией 201 связаны подходящие приводные средства, такие как электрический двигатель 202, которые могут управляться приведения во вращение диска 203 для абразивной обработки или полировки обрабатываемой заготовки.
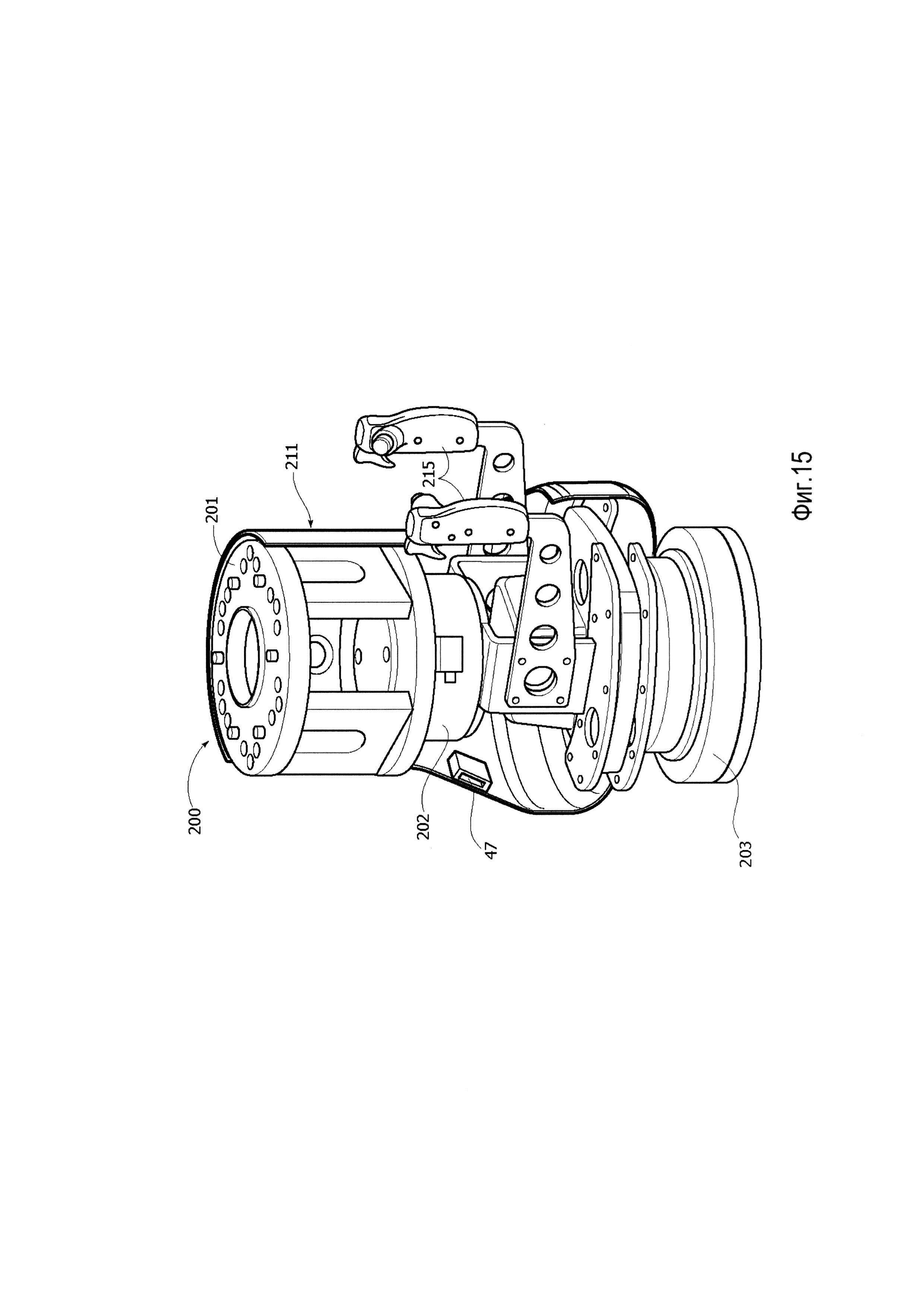
В схематическом примере с фиг. 14 с конструкцией 201 связаны два покрывающих модуля 210, 211, предназначенные для обеспечения сенсорного покрытия 220, которое преимущественно окружает конструкцию 201, оставляя открытым диск 203 механической обработки. Из фиг. 15 - где исключено изображение модуля 210 - можно понять как также и в этом случае модули 210-211 снабжены соответствующими электрическими соединительными средствами (здесь виден лишь соединитель 47, связанный с несущей конструкцией модуля 211), которые могут быть соединены вместе в собранном состоянии двух соответствующих модулей. В остальном применимы соображения, изложенные выше в отношении инструмента 100 с фиг. 12-13.
В данном примере инструмент 200 также снабжен устройством ручного управления, которое здесь включает в себя две в целом параллельные ручки, связанные с сенсором усилия с возможностью обмена сигналами с блоком управления робота, так чтобы дать оператору возможность осуществлять перемещения манипулятора и, таким образом, инструмента 200, в требуемом направлении работы. В этом случае каждая рукоятка также имеет соответствующую нажимную кнопку для управления вращением двигателя 102.
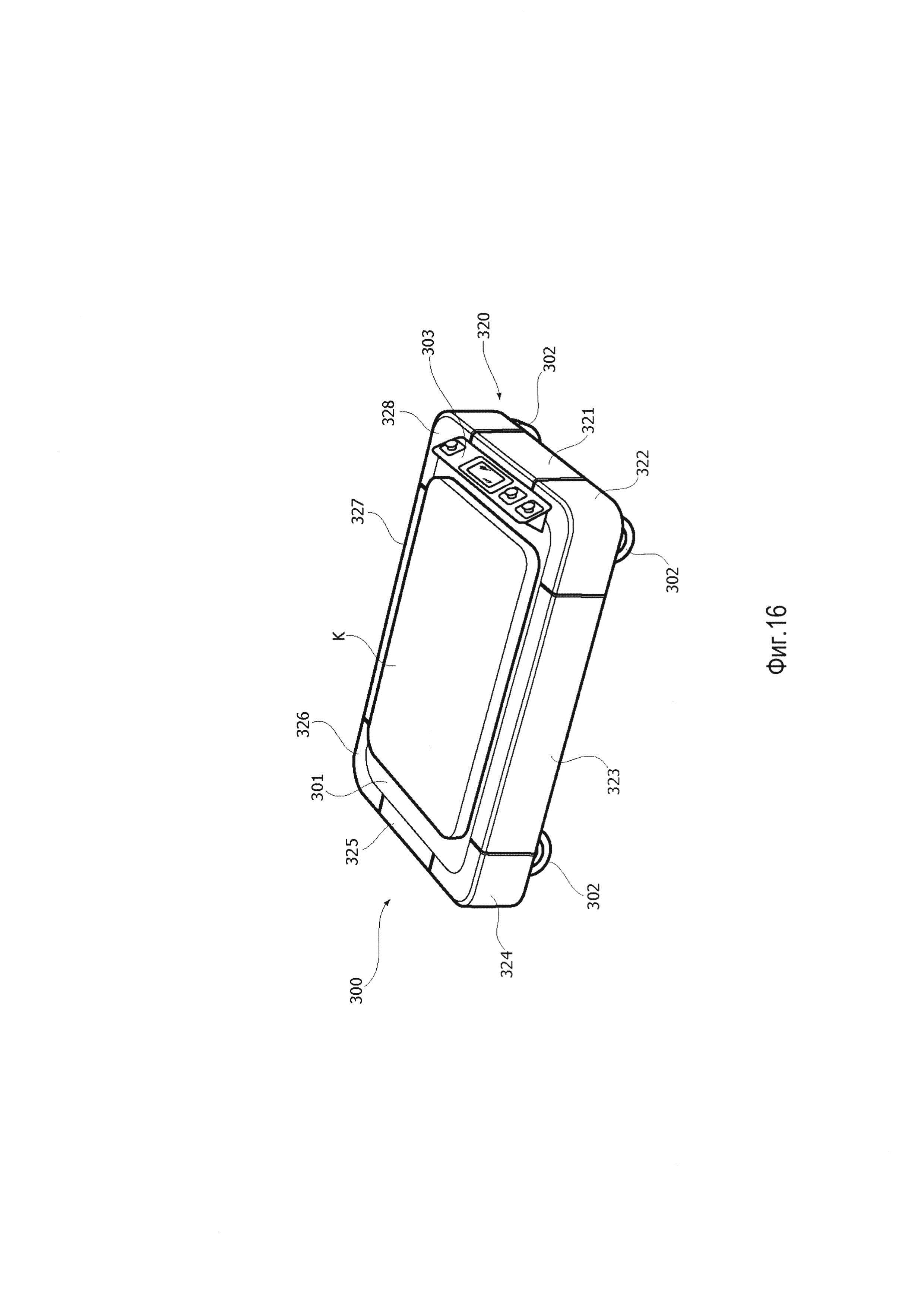
Сенсорное покрытие в соответствии с изобретением также применимо с устройствами для перемещения обрабатываемых компонентов. Соответствующий пример схематически изображен на фиг. 16, где цифрой 300 в целом обозначено транспортное средство с автоматизированным приводом, например типа автоматически управляемого транспортного средства (AGV) для транспортировки стандартной детали К в производственной системе. С несущей конструкцией 301 транспортного средства 300 связаны колеса 302, некоторые из которых приводятся во вращение посредством подходящего двигателя, предпочтительно электрического двигателя (не показан). Кроме того, конструкция 301 поддерживает систему 303 управления транспортного средства, например, содержащую блок управления и пользовательский интерфейс для установки рабочих параметров согласно известным способам. В соответствии с изобретением конструкция 301 имеет сенсорное покрытие, обозначенное в целом цифрой 320, которое электрически подсоединено к вышеупомянутому блоку управления. В этом примере предусмотрено множество покрывающих модулей 321-328, каждый из которых предпочтительно, но необязательно, сенсорный, имеющих такую форму, что в собранном состоянии они по существу полностью окружают конструкцию 301. При этом предпочтительно верхняя часть конструкции 301 остается открытой, чтобы на нее опиралась перемещаемая заготовка К. В этом типе осуществления также применяются принципы, описанные выше, поэтому предусмотрено, например, по меньшей мере в некоторых модулях 321-328 контактных сенсорных средств и/или сенсорных средств приближения, электрических соединительных средств и, возможно, механических соединительных средств для электрического и, возможно, механического соединения, соответственно, множества смежных модулей и т.д.
Модули, описанные со ссылками на фиг. 12-16, могут быть получены таким же образом, что и модули, описанные со ссылками на предыдущие фиг. 1-11.
Разумеется, что изобретение применимо и в автоматизированных устройствах других типов, используемых в промышленном производстве, и отличается наличием одной или более частей, подлежащих перемещению в зонах, потенциально близких к человеку-оператору, таких как поворотные столы и выдвижные части.
Из приведенного выше описания ясно следуют характеристики настоящего изобретения, равно как и обеспечиваемые им преимущества.
Модульный характер описанного сенсорного покрытия, с возможностью электрического взаимного соединения и, предпочтительно, также взаимного механического соединения различных модулей, позволяет получить множество конфигураций с возможностью сенсоризации по существу всей подвижной конструкции автоматизированного устройства или же только ее части, в зависимости от типа применения.
Данное решение делает возможной удобную установку покрывающих модулей и столь же удобное их удаление при необходимости. К этому следует добавить то преимущество, что в различных вариантах осуществления способы электрического взаимного соединения различных модулей дают возможность их работы независимо друг от друга.
Наличие несущей конструкции позволяет задавать форму отдельных модулей в соответствии с применением, с возможностью создания сенсорных покрытий для различных типов автоматизированных устройств. Оболочечный характер несущих конструкций модулей позволяет формировать полезные пространства, в которых могут быть размещены электрические/электронные части покрывающей системы и части автоматизированного устройства, причем с возможностью их использования также для целей вентиляции.
Наличие сенсорных средств, интегрированных по меньшей мере в некоторые покрывающие модули, позволяет выявлять контакт инородных тел с самим покрытием или приближение их к нему, а также идентифицировать зону покрытия, вовлеченную в контакт с инородным телом или в процесс приближения последнего, с возможностью совершения последующего корректирующего действия. Сенсорные средства, в частности контактные сенсорные средства, могут успешно применяться для подачи команд в систему управления, координирующую работу автоматизированного устройства.
Кроме того, обеспечиваются функции пассивной безопасности благодаря наличию упругодеформируемых слоев, которые способны поглощать удары, а также благодаря способности к слому несущих конструкций модулей в случае значительной ударной нагрузки.
Разумеется, что специалист в данной области техники может внести различные изменения в описанные выше примеры сенсорного покрытия и автоматизированного устройства, не выходя при этом за рамки объема патентной охраны, определенного прилагаемой формулой изобретения.
Изобретение применимо к промышленным роботам различных размеров и грузоподъемности и, таким образом, роботам умеренной грузоподъемности (например, всего лишь несколько килограммов) и роботам большой грузоподъемности (например, сотни килограммов), а также роботам, не относящимся к антропоморфному типу, которые здесь приведены в качестве примера, например роботам декартовой конфигурации, цилиндрической конфигурации, полярной конфигурации, конфигурации типа SCARA (роботизированная рука избирательной податливости) и т.д.
Различные пассивные слои, упомянутые выше, например смягчающий слой 60, могут, в свою очередь, состоять из нескольких слоев материала, установленных друг над другом и фиксированных относительно друг друга, например, посредством склеивания.
Реферат
Изобретение относится к роботу. Робот содержит подвижную конструкцию, приводные средства для обеспечения перемещений подвижной конструкции, систему управления, содержащую блок управления и способную управлять приводными средствами, и сенсорное покрытие, расположенное на подвижной конструкции. Сенсорное покрытие включает в себя сенсорные средства, содержащие по меньшей мере одно из контактных сенсорных средств и сенсорных средств приближения. Сенсорное покрытие содержит множество покрывающих модулей, имеющих каждый соответствующую несущую конструкцию заданной формы, с которой связан слой упругодеформируемого материала. Покрывающие модули выполнены с возможностью взаимного соединения разъемным образом. Несущая конструкция некоторых из упомянутого множества покрывающих модулей имеет связанные с ней механические соединительные средства, обеспечивающие возможность взаимного механического разъемного соединения двух разных покрывающих модулей из упомянутого множества, смежных друг с другом. В результате обеспечивается пассивная и активная безопасность при использовании робота. 13 з.п. ф-лы, 16 ил.
Комментарии