Способ и модуль для определения, по меньшей мере, одного опорного значения - RU2598494C2
Код документа: RU2598494C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу и модулю для определения, по меньшей мере, одного опорного значения, которое указывает, как следует влиять на скорость транспортного средства, и которое может использоваться для управления, по меньшей мере, одной системой управления транспортным средством, в соответствии с ограничительными частями независимых пунктов формулы изобретения.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Автоматическое поддержание постоянной скорости движения в настоящее время представляет собой обычную систему в моторных транспортных средствах, например легковых автомобилях, грузовиках и автобусах. Цель автоматического поддержания постоянной скорости движения состоит в том, чтобы достичь однородной заданной скорости. Это выполняется либо путем регулирования крутящего момента двигателя для исключения замедления, или путем применения тормозящего действия при движении на спуске, когда транспортное средство ускоряется под действием своего собственного веса. Более общая цель автоматического поддержания постоянной скорости движения состоит в том, чтобы обеспечить удобное управление движением и большее удобство для водителя транспортного средства.
Водитель транспортного средства, в котором установлена система автоматического поддержания постоянной скорости движения, обычно выбирает устанавливаемую скорость vset как скорость, которую он или она желает поддерживать при движении транспортного средства на горизонтальных дорогах. Система автоматического поддержания постоянной скорости движения затем подает в систему двигателя транспортного средства опорную скоростью vref, используемую для управления двигателем. Устанавливаемая скорость vset может, таким образом, рассматриваться как входной сигнал для автоматического управления поддержанием постоянной скорости, тогда как опорная скорость vref может рассматриваться как выходной сигнал для автоматического поддержания постоянной скорости движения и используется для управления двигателем.
Современные традиционные системы автоматического поддержания постоянной скорости движения (CC) поддерживают постоянную опорную скорость vref, обычно установленную водителем транспортного средства в форме установленной скорости vset, которая, таким образом, представляет собой требуемую скорость, выбранную, например, им/ею, и для удобного управления в современных системах с автоматическим поддержанием постоянной скорости движения опорная скорость является постоянной и равной установленной скорости, то есть vref=vset. Значение опорной скорости vref изменяется, только когда регулируется водителем при движении транспортного средства. Опорную скорость vref затем передают в систему управления, которая управляет транспортным средством так, чтобы его скорость соответствовала, когда это возможно, опорной скорости vref. Если транспортное средство оборудовано системой автоматической трансмиссии, переключение трансмиссии может выполняться этой системой на основе опорной скорости vref для обеспечения поддержания транспортным средством опорной скорости vref, то есть для обеспечения поддержания требуемой установленной скорости vset.
На холмистой местности система оптимального регулирования скорости пытается поддерживать установленную скорость vset при подъеме и на спуске. Это может привести, помимо прочего, к ускорению транспортного средства на вершине холма и на последующем спуске. При этом потребуется тормозить для того, чтобы исключить превышение установленной скорости vset, или будет достигнута скорость, при которой активируется тормоз постоянной скорости, что представляет собой способ, чрезмерно расходующий топливо при управлении транспортным средством. Также может потребоваться выполнять торможение при спуске для исключения превышения установленной скорости vset или скорости vkfb активации тормозов для постоянной скорости, в случаях когда транспортное средство не ускоряется на вершине холма.
Для уменьшения расхода топлива, особенно на холмистых дорогах, были разработаны экономичные системы автоматического поддержания постоянной скорости движения, такие как Ecocruise® компании Scania. Такая система автоматического поддержания постоянной скорости пытается выполнять оценку текущего сопротивления при движении транспортного средства и также имеет информацию предыстории о сопротивлении движению. В экономичной системе автоматического поддержания постоянной скорости также могут быть предусмотрены данные карты, содержащие топографическую информацию. Транспортное средство затем размещают на карте, например, используя GPS, и выполняют оценку сопротивления при движении на будущем участке дороги. Опорная скорость vref транспортного средства, таким образом, может быть оптимизирована для разных типов дорог для экономии топлива, в этом случае опорная скорость vref может отличаться от установленной скорости vset. Данное описание относится к управлению с автоматическим поддержанием постоянной скорости движения, при котором опорной скорости vref разрешено отличаться от установленной скорости vset, выбранной водителем, то есть которое представляет собой автоматическую систему поддержания постоянной скорости с регулированием опорной скорости.
Пример дополнительного развития экономичной системы автоматического поддержания постоянной скорости движения представляет собой систему автоматического поддержания постоянной скорости системой автоматического поддержания постоянной скорости движения с "предвидением" (LACC), которая представляет собой стратегическую форму автоматического поддержания постоянной скорости, в которой используется знание будущих участков дороги, то есть знание свойств участков дороги, расположенных впереди, для определения опорной скорости vref. LACC, таким образом, представляет собой пример системы автоматического поддержания постоянной скорости движения, которая позволяет опорной скорости vref отличаться в определенном диапазоне от установленной скорости vset, выбранной водителем, для того чтобы обеспечить большую экономию топлива.
Знание расположенного впереди участка дороги может, например, содержать информацию о преобладающей топологии, кривизне дороги, ситуации с трафиком, дорожных работах, грузопотоке и состоянии дороги. Оно также может дополнительно содержать ограничение скорости на расположенном впереди участке и дорожные знаки, расположенные на дороге. Такое знание может быть получено, например, из информации о местоположении, например информации GPS (Глобальная навигационная система), информации карты и/или информации топографической карты, прогнозам погоды, информации, передаваемой между транспортными средствами, и информации, передаваемой по радио. Все это знание можно использовать различным образом. Например, информация об ограничении скорости на расположенном впереди участке дороги может использоваться для достижения эффективности потребления топлива путем уменьшения скорости транспортного средства перед достижением нижнего ограничения скорости. Аналогично, знание дорожных знаков, которые указывают, например, участки дороги с круговой развязкой или перекресток, расположенные впереди, также можно использовать для достижения эффективного потребления топлива путем торможения прежде, чем транспортное средство достигнет участка круговой развязки или перекрестка.
Система автоматического поддержания постоянной скорости LACC, например, позволяет перед крутым подъемом повысить опорную скорость vref до уровня выше установленной скорости vset, поскольку ожидается, что транспортное средство потеряет скорость на таком подъеме вследствие большого веса грузовика с прицепом относительно характеристик двигателя. Аналогично перед крутым спуском система автоматического поддержания постоянной скорости LACC позволяет снизить опорную скорость vref для уровня ниже установленной скорости vset, поскольку ожидается, что транспортное средство будет ускоряться на таком спуске вследствие большого веса грузовика с прицепом. Концепция, заложенная здесь, состоит в том, что уменьшение скорости, на которой транспортное средство начинает движение на спуске, позволяет уменьшить энергию, расходуемую при торможении, и/или потери на сопротивление воздуха (что отражается на количестве топлива, впрыск которого выполняется перед спуском). Система автоматического поддержания постоянной скорости LACC, таким образом, может существенно уменьшить потребление топлива, не влияя на время движения.
Такие системы оптимального поддержания постоянной скорости могут работать достаточно надежно, если расположенная впереди топография будет известна на транспортном средстве, в котором содержатся данные карты и GPS. Система оптимального поддержания постоянной скорости также может активно изменять скорость транспортного средства, то есть прежде чем возникнут ситуации.
Транспортное средство обычно имеет множество ECU (электронных модулей управления), которые управляют различными электронными системами транспортного средства. Двигателем транспортного средства часто управляют, используя его собственные ECU, называемые EMS (система управления двигателем). Логическая схема автоматического поддержания постоянной скорости движения может быть установлена в EMS, но это иногда невозможно, в случае когда EMS имеют недостаточный объем памяти и/или уже имеют высокую нагрузку на процессор. Если логическая схема автоматического поддержания постоянной скорости движения будет установлена в некотором другом ECU, кроме EMS, опорные значения, например требуемую опорную скорость vref, потребуется передавать через CAN (вычислительная сеть контроллера) в регулятор системы управления двигателем, который затем регулирует скорость транспортного средства по опорной скорости vref.
Традиционный ПИД регулятор работает на основе полученной опорной скорости vref. Когда такая опорная скорость vref изменяется логической схемой автоматического поддержания постоянной скорости движения и ее передают через CAN, ПИД регулятор в системе управления двигателем регулирует скорость автомобиля по опорной скорости vref. Логическая схема автоматического поддержания постоянной скорости движения прогнозирует скорость транспортного средства, но регулятор в системе управления двигателем пытается одновременно регулировать скорость транспортного средства, что может привести к проблемам. Это может, например, привести к тому, что максимальный крутящий момент не будет затребован системой двигателя в начале подъема, несмотря на то что логическая схема автоматического поддержания постоянной скорости движения учитывала это в своем прогнозе опорной скорости vref. Поэтому существует риск того, что регулятор может регулировать систему двигателя с постепенно увеличивающейся ошибкой.
US 2005/0096183 относится к регулятору скорости для транспортного средства, движущегося по спуску. Соответствующий холм описан как имеющий определенный градиент спуска, и, когда водитель включает переключатель градиента, постоянная скорость устанавливается для транспортного средства до тех пор, пока такой переключатель включен. Постоянная скорость, таким образом, устанавливается, когда водитель указывает, что транспортное средство находится на холме.
В US 6076036 управление для автоматического поддержания постоянной скорости движения основано на установке скорости, текущей скорости транспортного средства, ускорении, а также изменении градиента на дороге, который измеряется датчиком, для установки потока топлива на более низкий уровень потребления топлива.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения состоит в том, чтобы предложить улучшенное автоматическое поддержание постоянной скорости движения транспортного средства, когда его скорость должна прогнозироваться логической автоматической схемой для поддержания постоянной скорости и одновременно с этим должна регулироваться регулятором, в частности, для исключения ненужного впрыска топлива в двигатель, из-за нестабильного сигнала управления в системе управления двигателем.
В соответствии с аспектом настоящего изобретения описанные выше задачи, по меньшей мере, частично решаются путем применения упомянутого выше способа, который отличается тем, что:
- делают первый прогноз Vpred_Tnew_ret и второй прогноз Vpred_Tnew_acc скорости автомобиля вдоль горизонта, упомянутый первый прогноз основан на крутящем моменте Tret двигателя, который замедляет транспортное средство по сравнению с обычным автоматическим поддержанием постоянной скорости движения, и упомянутый второй прогноз основан на крутящем моменте Tacc двигателя, который ускоряет транспортное средство по сравнению с обычным автоматическим поддержанием постоянной скорости движения;
- сравнивают упомянутый соответствующий первый прогноз Vpred_Tnew_ret и второй прогноз Vpred_Tnew_acc скорости транспортного средства с нижним предельным значением vmin и/или верхним предельным значением vmax, которые ограничивают диапазон, в пределах которого должна находиться скорость транспортного средства, со смещением voffset, добавленным к упомянутому нижнему и/или верхнему предельным значениямvmin иvmax, если транспортное средство находится на сегменте маршрута, который содержит крутой холм; и
- определяют, по меньшей мере, одно опорное значение на основе, по меньшей мере, одного из упомянутых соответствующих сравнений и упомянутого первого прогноза Vpred_Tnew_ret и второго прогноза Vpred_Tnew_acc скорости транспортного средства вдоль горизонта.
В соответствии с аспектом настоящего изобретения, по меньшей мере, одна из задач, описанных выше, решается при использовании упомянутого выше модуля для управления скоростью транспортного средства, причем этот модуль отличается следующим:
- делают первый прогноз Vpred_Tnew_ret и второй прогноз Vpred_Tnew_acc скорости транспортного средства вдоль горизонта, упомянутый первый прогноз основан на крутящем моменте Tret двигателя, который замедляет транспортное средство по сравнению с обычным автоматическим поддержанием постоянной скорости движения, и упомянутый второй прогноз основан на крутящем моменте Tacc двигателя, который ускоряет транспортное средство по сравнению с обычным автоматическим поддержанием постоянной скорости движения;
- сравнивают упомянутый соответствующий первый прогноз Vpred_Tnew_ret и второй прогноз Vpred_Tnew_acc скорости транспортного средства с нижним предельным значением vmin и/или верхним предельным значением vmax, которые ограничивают диапазон, в пределах которого должна поддерживаться скорость транспортного средства со смещением voffset, добавленным к упомянутому нижнему и/или верхнему предельным значениям vmin и vmax, если транспортное средство находится на сегменте маршрута, который содержит крутой холм; и
- определяют, по меньшей мере, одно опорное значение на основе, по меньшей мере, одного из упомянутых соответствующих сравнений и упомянутого первого прогноза Vpred_Tnew_ret и второго прогноза Vpred_Tnew_acc скорости транспортного средства вдоль горизонта.
Изобретение обеспечивает гарантированную подачу в регулятор правильных значений установленной скорости (опорных значений) для обеспечения следования прогнозу скорости транспортного средства. Максимальная гарантия, таким образом, достигается в соответствии с доступным крутящим моментом двигателя на крутых подъемах и с нулевыми крутящим моментом/тормозящим крутящим моментом на крутых спусках. Это означает, что ошибка регулирования, влияющая на регулятор на крутых подъемах, достаточна в начале подъема для того, чтобы двигатель мог подавать максимальный крутящий момент на этом этапе для исключения падения скорости транспортного средства более, чем необходимо. На участках с крутым спуском обеспечивается значение установленной точки для постоянной скорости для исключения впрыска топлива в двигатель.
Изобретение также направлено на способ улучшения рабочих характеристик распределенной системы регулирования, в которой трудно применять традиционные способы непосредственного влияния на регулятор, например отключение или более сильные параметры регулятора, из-за того что генератор значения установленной точки и регулятор расположены в разных модулях управления.
Изобретение также обеспечивает преимущество предотвращения превышения скорости транспортного средства на вершине холма, для того чтобы достичь опорной скорости транспортного средства перед началом движения на спуске. Такое превышение скорости на вершине холма обычно приводит к ненужным затратам.
Изобретение, таким образом, обеспечивает согласованное регулирование скорости транспортного средства, то есть без снижения скорости с последующим повышением скорости на вершине холма.
Предпочтительные варианты осуществления изобретения описаны в зависимых пунктах формулы изобретения и в подробном описании изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет описано ниже со ссылкой на приложенные чертежи, на которых:
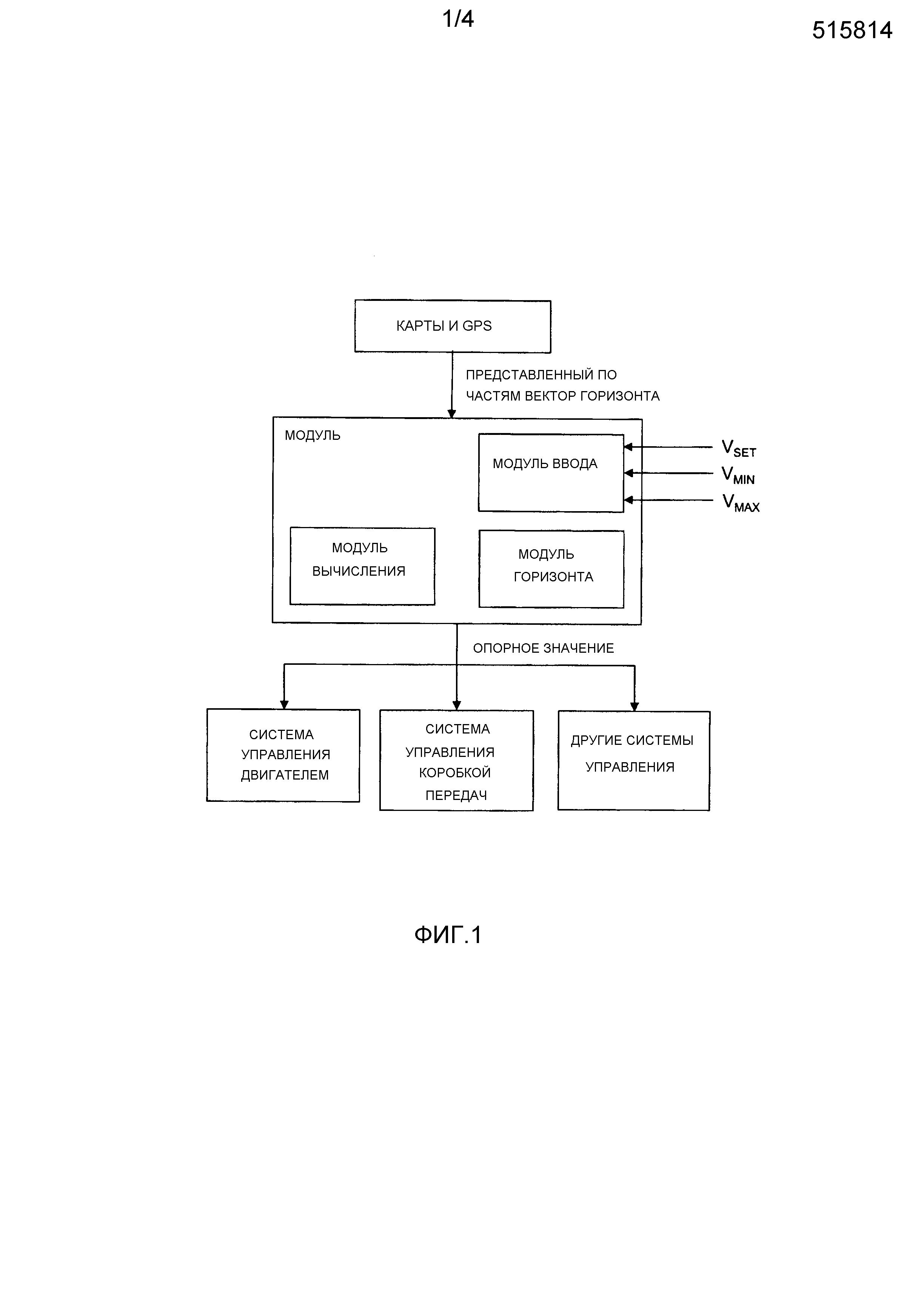
На фиг. 1 представлен модуль в соответствии с вариантом осуществления изобретения.
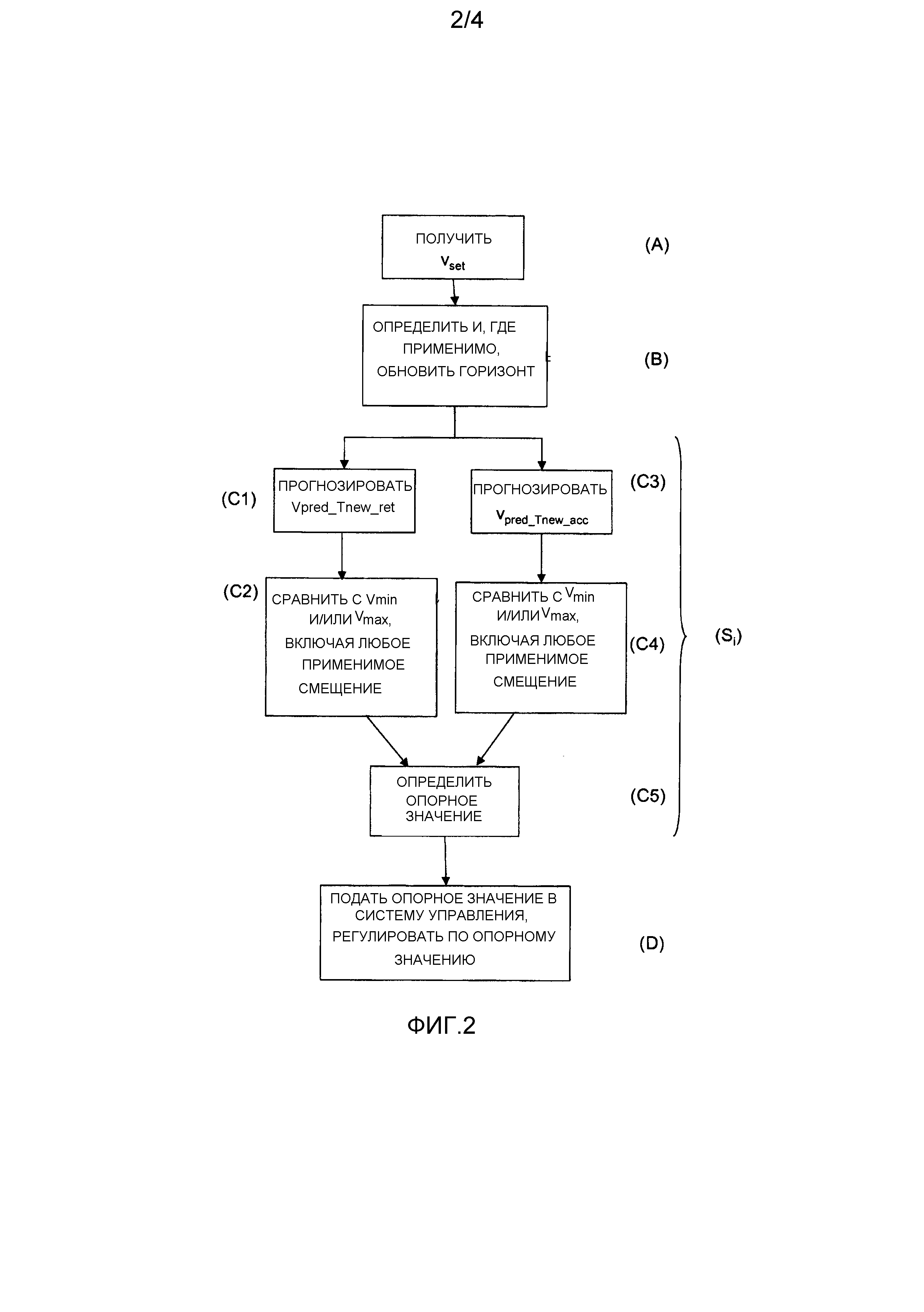
На фиг. 2 показана блок-схема последовательности операций способа в соответствии с изобретением.
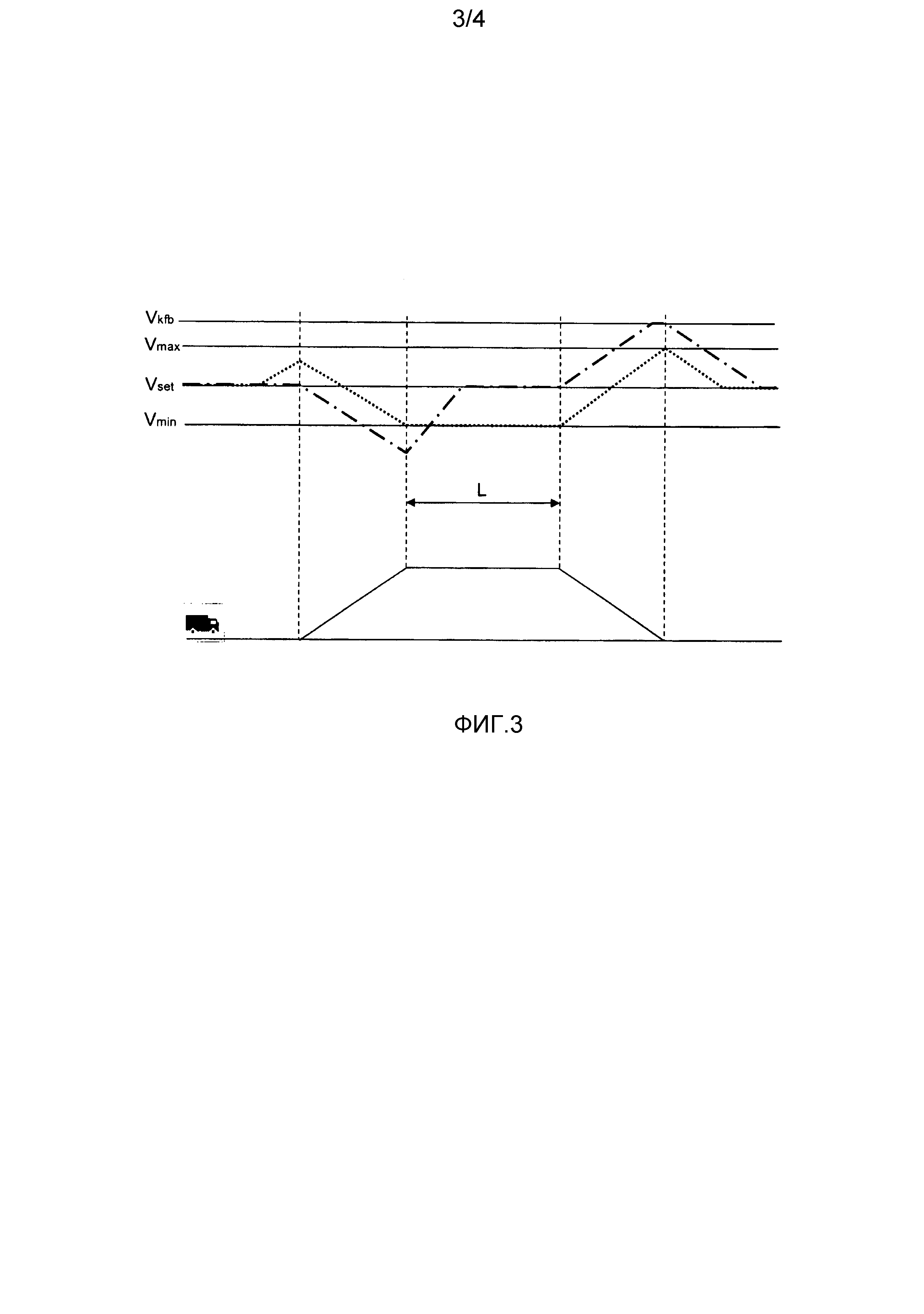
На фиг. 3 показано различие между изобретением и традиционным автоматическим поддержанием постоянной скорости движения в соответствии с вариантом осуществления изобретения.
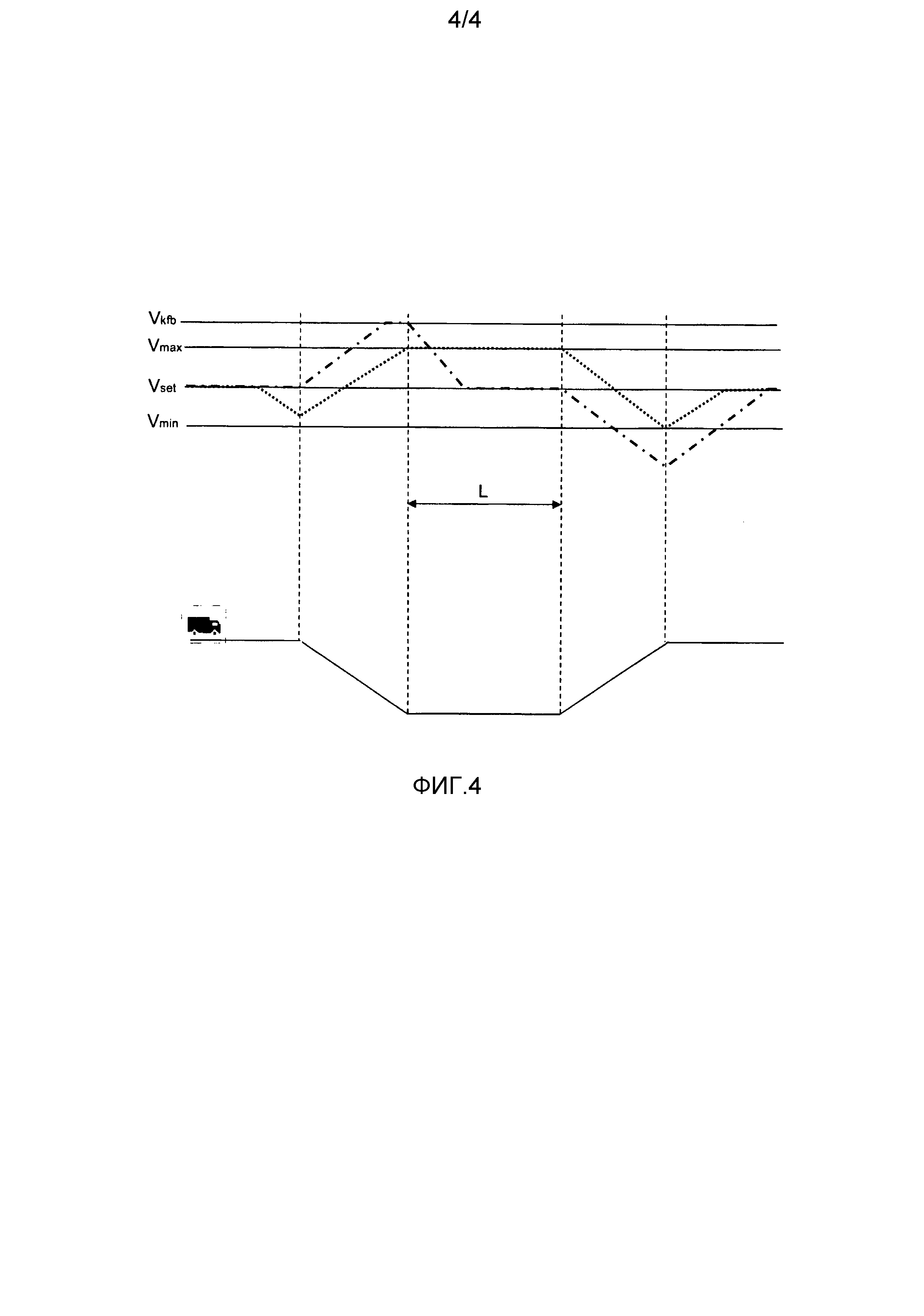
На фиг. 4 показано различие между изобретением и традиционным автоматическим поддержанием постоянной скорости движения в соответствии с вариантом осуществления изобретения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
Подробное описание предпочтительных вариантов осуществления изобретения на фиг. 1 представляет модуль для управления скоростью транспортного средства в соответствии с аспектом изобретения. Модуль содержит входной модуль, выполненный с возможностью приема требуемой скорости, то есть установленной скорости vset, для транспортного средства. Водитель может, например, устанавливать желательную для него/нее скорость vset, которую будет поддерживать транспортное средство. Модуль также содержит модуль горизонта, выполненный с возможностью определения горизонта H для маршрута с использованием данных карты и данных местоположения. Горизонт H состоит из сегментов маршрута, по меньшей мере, с одной характеристикой для каждого сегмента. Возможный пример характеристик сегментов представляет собой их градиент α, в радианах.
В описании настоящего изобретения заявлено, что GPS (Глобальная система навигации) используется для определения данных о местоположении для транспортного средства, но специалистам будет понятно, что другие виды глобальных или региональных систем навигации могут быть рассмотрены для предоставления этих данных. В таких системах навигации могут, например, использоваться радиоприемники для определения местоположения транспортного средства. В транспортном средстве также могут использоваться датчики для сканирования окружения и, таким образом, определения местоположения транспортного средства.
На фиг. 1 иллюстрируется, как в модуль передают информацию о маршруте из карт (данных карты) и GPS (данных местоположения). Маршрут передают в модуль бит за битом, например, используя шину CAN (вычислительная сеть контроллера). Модуль может быть отдельным от или может составлять часть одной или больше систем управления, которые должны использовать опорные значения для регулирования. Пример такой системы управления представляет собой систему управления двигателем транспортного средства. Например, горизонт сводят вместе для каждой системы управления, поскольку системы управления регулируют разные параметры. В качестве альтернативы модуль, который обрабатывает карты, и системы навигации, также может составлять часть системы, которая должна использовать опорные значения для регулирования. В этом модуле биты маршрута затем сводят вместе в модуле горизонта для построения горизонта и обрабатывают модулем обработки для формирования внутреннего горизонта, по которому система управления может выполнять регулировку. В горизонт затем постоянно подают новые биты маршрута из модуля с GPS и данных карты, для поддержания требуемой длины горизонта. Горизонт, таким образом, постоянно обновляют, когда транспортное средство находится в движении.
CAN представляет собой систему последовательной шины, специально разработанную для использования в транспортных средствах. Шина данных CAN обеспечивает возможность обмена цифровыми данными между датчиками, регулирующими компонентами, активаторами, устройствами управления и т.д., и обеспечивает гарантию того, что два или больше устройства управления могут иметь доступ к сигналам данного датчика для использования их для управления компонентами, соединенными с ними. Каждое из соединений между модулями, представленными на фиг. 1, может принимать форму одного или больше из кабеля, шины данных, например шины CAN (вычислительной сети контроллера), шины MOST (транспортировка систем, ориентированных на среду), или некоторую другую конфигурацию шины или проводного соединения.
Модуль содержит также вычислительный модуль, выполненный с возможностью выполнения первого прогноза Vpred_Tnew_ret и второго прогноза Vpred_Tnew_acc скорости транспортного средства вдоль горизонта, упомянутый первой прогноз основан на крутящем моменте Tret двигателя, который тормозит транспортное средство по сравнению с обычным автоматическим поддержанием постоянной скорости движения, и упомянутый второй прогноз основан на крутящем моменте Tacc двигателя, который ускоряет транспортное средство, по сравнению с обычным автоматическим поддержанием постоянной скорости движения.
Модуль дополнительно выполнен с возможностью сравнения упомянутого соответствующего первого прогноза Vpred_Tnew_ret и второго прогноза Vpred_Tnew_acc скорости транспортного средства с нижним предельным значением vmin и/или верхним предельным значением vmax, которые ограничивают диапазон, в пределах которого должна находиться скорость транспортного средства, со смещением voffset, добавленным к упомянутому нижнему и/или верхнему предельным значениям vmin и vmax, если транспортное средство находится на сегменте маршрута, который содержит крутой холм.
Модуль дополнительно выполнен с возможностью определения, по меньшей мере, одного опорного значения на основе, по меньшей мере, одного из упомянутых соответствующих сравнений и упомянутого первого прогноза Vpred_Tnew_ret и упомянутого второго прогноза Vpred_Tnew_acc скорости транспортного средства вдоль горизонта.
Модуль дополнительно выполнен с возможностью подачи, например, путем передачи в систему управления транспортным средством упомянутого, по меньшей мере, одного опорного значения, по которому затем регулируют движение транспортного средства. Как выполняют прогнозирование скорости, более подробно поясняется ниже.
Модуль и/или модули вычисления содержат, по меньшей мере, процессор и модуль памяти, которые выполнены с возможностью выполнения всех расчетов, прогнозирований и сравнений для способа в соответствии с изобретением. Процессор здесь означает процессор или микрокомпьютер, например схему для обработки цифровых сигналов (цифровой сигнальный процессор, DSP), или схему с определенной специфичной функцией (специализированную интегральную схему, ASIC). Модуль вычисления соединен с модулем памяти, который передает в него, например, сохраненный программный код и/или сохраненные данные, которые требуются модулю вычисления для обеспечения возможности его вычисления. Модуль вычисления также выполнен с возможностью сохранения частичных или конечных результатов вычисления в модуле памяти.
Способ управления скоростью транспортного средства в соответствии с настоящим изобретением и его различные варианты осуществления также могут быть воплощены в компьютерной программе, которая при исполнении ее в компьютере, например, в упомянутом выше процессоре, обеспечивает применение компьютером способа. Компьютерная программа обычно выполнена в форме компьютерного программного продукта, содержащегося на цифровом носителе записи, и содержится на считываемом в компьютере компьютерном программном продукте, который содержит соответствующее запоминающее устройство, например ROM (постоянное запоминающее устройство), PROM (программируемое постоянное запоминающее устройство), EPROM (стираемое PROM), память флэш, EEPROM (электрически стираемое PROM), накопитель на жестком диске и т.д.
На фиг. 2 показана блок-схема последовательности операций способа, который, помимо прочего, содержит этапы способа в соответствии с изобретением. Схема содержит не только этапы для определения опорных значений в соответствии с изобретением, но также и этапы для управления скоростью транспортного средства в соответствии с вариантом осуществления изобретения.
Способ содержит первый этап A) получения vset в качестве требуемой установленной скорости для поддержания ее транспортным средством и второй этап B) определения горизонта для маршрута с помощью данных карты и данных местоположения, содержащих сегменты маршрута, по меньшей мере, с одной характеристикой для каждого сегмента.
Множество циклов моделирования может быть выполнено вдоль длины горизонта. Цикл sj моделирования может содержать множество N этапов имитации, которые могут быть выполнены с заданной частотой f. В соответствии с изобретением следующие этапы выполняют во время такого цикла sj имитации;
C1) Выполняют первое прогнозирование Vpred_Tnew_ret скорости транспортного средства вдоль горизонта на основе крутящего момента Tret двигателя, который замедляет транспортное средство по сравнению с обычным автоматическим поддержанием постоянной скорости движения.
C2) Сравнивают упомянутый первый прогноз Vpred_Tnew_ret скорости транспортного средства с нижним предельным значением vmin и/или верхним предельным значением vmax, которые ограничивают диапазон, в пределах которого должна находиться скорость транспортного средства. Упомянутый первый прогноз, таким образом, не следует сравнивать здесь как с нижним предельнымзначениемvmin,так и с верхнимпредельнымзначениемvmax. Перед сравнением, если транспортное средство находится на сегменте маршрута, который содержит крутой холм, здесь добавляется смещение Voffset к упомянутому нижнему предельному значению vmin и/или упомянутому верхнему предельному значению vmax.
C3) Выполняют второй прогноз Vpred_Tnew_acc скорости транспортного средства вдоль горизонта на основе крутящего момента Tacc двигателя, который ускоряет транспортное средство по сравнению с обычным автоматическим поддержанием постоянной скорости движения.
C4) Сравнивают упомянутый второй прогноз Vpred_Tnew_acc со скоростью транспортного средства, с нижним предельным значением vmin и/или верхним предельным значением vmax, которые ограничивают диапазон, в пределах которого должна находиться скорость транспортного средства. Упомянутый второй прогноз, таким образом, не следует сравнивать здесь как с нижним предельнымзначениемvmin,так и с верхним предельным значениемvmax. Перед сравнением, если транспортное средство находится на сегменте маршрута, который содержит крутой холм, смещение voffset здесь добавляют к упомянутому нижнему предельному значению vmin и/или упомянутому верхнему предельному значению vmax. Сравнение, таким образом, выполняют на основе нижнего и верхнего предельных значенийvmin и vmax, включая в себя любое применимое смещение.
C5) Определяют, по меньшей мере, одно опорное значение на основе, по меньшей мере, одного из упомянутых соответствующих сравнений и упомянутого первого прогноза Vpred_Tnew_ret и второго прогноза Vpred_Tnew_acc скорости транспортного средства вдоль горизонта.
На дополнительном этапе D) упомянутое, по меньшей мере, одно опорное значение затем подают, например, путем его передачи через шину CAN в систему управления транспортным средством, в которой его используют для регулирования скорости транспортного средства, в соответствии с упомянутым, по меньшей мере, одним опорным значением.
Когда транспортное средство движется вдоль дороги, в систему управления подают опорные значения, по которым она затем регулирует транспортное средство. В соответствии с изобретением, когда регулируют скорость транспортного средства на участке маршрута, который содержит крутой подъем или крутой спуск, значение смещения voffset добавляют на этапе C5) к упомянутому нижнему и/или верхнему предельным значениям vmin и vmax.
Транспортное средство после этого регулируют на опорной скорости vref на этапе D) до тех пор, пока не наступит конец движения по крутому подъему или спуску. Опорную скорость vref затем снова берут из прогнозированного внутреннего горизонта. Таким образом, становится возможным компенсировать то, что логика автоматического поддержания постоянной скорости движения располагается в некоторой другой системе управления, чем EMS, либо с получением большой ошибки регулирования в начале движения с подъемом, или путем получения малой ошибки регулирования при движении на спуске. Применение изобретения позволяет получить максимальный крутящий момент двигателя на крутых подъемах и обеспечить необходимость малого регулирования ошибки транспортного средства при спуске.
Вариант осуществления изобретения позволяет только смещать второе нижнее и верхнее предельное значение vmin и vmax, когда текущая скорость транспортного средства уже находится за пределами диапазона, ограниченного этим значением.
Пример этого представляет собой случай, когда транспортное средство теряет скорость при движении на подъеме и приближается к движению по спуску. Отрицательное смещение vmin затем разрешено так, что транспортное средство может временно поддерживать более низкую скорость, чем vmin при движении на спуске, когда Vpred_Tnew_ret указывает, что транспортное средство будет ускоряться выше установленной скорости vset под действием гравитации на спуске.
В соответствии с вариантом осуществления становится возможным в представленном выше примере ввести запас для установленной скорости vset таким образом, что максимальное значение первого прогноза Vpred_Tnew_ret скорости транспортного средства на спуске (для транспортного средства, ускоряющегося под действием силы тяжести), будет равно или больше дополнительного верхнего предельного значения vmax, которое относится к установленной скорости vset. В соответствии с вариантом осуществления дополнительное верхнее предельное значение vmax2 соответствует установленной скорости плюс постоянная c1, то есть vmax2=vset+c1. В соответствии с другим вариантом осуществления дополнительное верхнее предельное значение vmax2 соответствует коэффициенту c1, умноженному на установленную скорость vset, то есть vmax2=vset·c1. Например, такой коэффициент c1может иметь значение 1,02, что означает, что дополнительное верхнее предельное значение vmax2 на 2 % выше, чем установленная скоростьvset.
Другой пример этого представляет собой случай, когда транспортное средство ускоряется под действием силы тяжести при движении на спуске и затем приближается к движению на подъеме. Положительное смещение верхнего предельного значения vmax затем разрешено так, что транспортное средство может временно поддерживать более высокую скорость, чем верхнее предельное значение vmax на подъеме, чем когда второе прогнозирование Vpred_Tnew_acc указывает, что скорость транспортного средства упадет ниже установленной скорости vset при движении на подъеме.
В соответствии с другим вариантом осуществления, становится возможным в представленном выше примере ввести запас для установленной скорости vset так, чтобы минимальное значение второго прогнозирования Vpred_Tnew_acc скорости транспортного средства на подъеме (для транспортного средства, теряющего скорость на подъеме, из-за действия силы тяжести) будет равно или ниже дополнительного нижнего предельного значения vmin2, что относится к установленной скорости vset. В соответствии с вариантом осуществления дополнительное нижнее предельное значение vmin2 соответствует установленной скорости минус постоянная c2, то есть vmin2=vset-c2. В соответствии с другим вариантом осуществления дополнительное нижнее предельное значение vmin2 соответствует коэффициенту c2, умноженному на установленную скорость vset, то есть vmin2=vset·c2. Этот коэффициент c2 может, например, иметь значение 0,98, что означает, что дополнительное нижнее предельное значение vmax2 на 2% ниже, чем установленная скорость vset.
Пример типичного значения для смещения voffset составляет 5 км/ч, но можно использовать любые другие соответствующие значения, если они достигают цели изобретения.
В соответствии с вариантом осуществления изобретения смещение voffset имеет положительное значение, когда транспортное средство находится на сегменте маршрута, который содержит крутой подъем. В соответствии с данным вариантом осуществления положительное смещение добавляют к упомянутому нижнему и/или верхнему предельному значению vmin иvmax, когда транспортное средство движется на крутом подъеме. Опорную скорость vref, подаваемую в систему управления транспортного средства, поэтому, принимают, как опорную скорость vref, рассчитанную системой управления на основе упомянутого нижнего и/или верхнего предельного значения vmin и vmax плюс смещение, то есть vmin+voffset и vmax+voffset, когда транспортное средство движется по крутому подъему. Максимальный крутящий момент двигателя, таким образом, обеспечивается на крутых подъемах.
В соответствии с вариантом осуществления настоящего изобретения смещение Voffset имеет отрицательное значение, когда транспортное средство находится на сегменте маршрута, который содержит крутой спуск. Аналогично, как и для крутых подъемов, когда транспортное средство находится на крутом спуске, отрицательное voffset смещение, поэтому, добавляют к упомянутому нижнему и/или верхнему предельному значениям vmin иvmax. Опорную скорость vref, которую подают в систему управления транспортного средства, затем используют, как опорную скорость vref, рассчитываемую системой управления на основе упомянутого нижнего и/или верхнего предельных значений vmin и vmax плюс -|voffset|, то есть vmin -|Voffset| и vmax -|Voffset|, когда транспортное средство движется на крутом спуске. Это обеспечивает нулевой крутящий момент или крутящий момент торможения на крутых спусках, для того чтобы исключить необходимость торможения движения по спуску.
В соответствии с вариантом осуществления значение смещения voffset является переменным с течением времени, для того чтобы обеспечить возможность удовлетворить критериям рабочих характеристик и комфорта, которые меняются с течением времени. Например, смещение Voffset может быть снижено (в направлении) нуля в конце крутого подъема, для того чтобы исключить рывки из-за быстрого изменения опорной скорости vref. Аналогично, смещение voffset может быть уменьшено (снижено) до нуля в конце движения на крутом спуске.
В соответствии с изобретением, для того чтобы исключить потребление ненужного количества топлива, когда после первого крутого подъема или первого крутого спуска следует крутой подъем или крутой спуск через некоторое расстояние L, ни ускорение, ни замедление транспортного средства не разрешены, когда оно находится на участке L.
Другими словами, только одно из ускорения и замедления разрешено на участке L в случаях, когда L определяет расстояние между крутым подъемом и последующим крутым спуском. Аналогично, только одно из ускорения и замедления разрешено на участке L в случаях, когда L определяет расстояние между крутым спуском и последующим крутым подъемом.
В соответствии с вариантом осуществления длина участка L зависит от скорости и/или приложенного режима транспортного средства. Например, режим, выбранный водителем, может определять длину участка L и, следовательно, также, в какой степени будет отрегулирована скорость транспортного средства.
Таким образом, в соответствии с этими вариантами осуществления только одно из ускорения и замедления происходит перед следующим холмом. На фиг. 3 и 4 схематично иллюстрируется неограничительный пример этих вариантов осуществления.
Обычное автоматическое поддержание постоянной скорости движения представлено штрихпунктирной линией, и автоматическое поддержание постоянной скорости движения в соответствии с вариантами осуществления настоящего изобретения пунктирной линией. Участок L здесь определен как имеющий некоторую длину, которая меньше, чем заданное пороговое значение. В соответствии с вариантом осуществления установленное здесь пороговое значение равно 250-500 м. Участок L может, например, быть определен путем сложения значений длин сегментов маршрута, которые расположены между холмами.
Когда транспортное средство поднимается на холм на фиг. 3, опорную скорость vref принимают как равную нижнему предельному значению vmin перед следующим холмом. Такую скорость vmin затем поддерживают на участке L, то есть до тех пор, пока транспортное средство находиться на, например, крутом спуске. Это исключает увеличение скорости транспортного средства, как случилось бы при обычном автоматическом поддержании постоянной скорости движения, поскольку транспортное средство стремилось бы затем поддерживать установленную скорость vset до последующего повторного снижения его скорости, для обеспечения возможности использования преимущества энергии, возникающей при движении вниз по спуску. Торможение на спуске транспортного средства, таким образом, может быть исключено.
Когда транспортное средство движется с обычным автоматическим поддержанием постоянной скорости движения (штрихпунктирная линия), больше энергии потребуется поглотить с помощью тормозов при движении по спуску, как представлено на диаграмме, на которой vkfb представляет установку скорости торможения на скорости замедлителя (постоянная скорость торможения). Постоянная скорость торможения транспортного средства, поэтому, действует при превышении такой скорости.
Аналогично, энергию экономят путем поддержания постоянной скорости на участке L, как представлено на фиг. 4. Когда транспортное средство переместилось вниз по холму на фиг. 4, опорная скорость vref принимается как равная верхнему предельному значению vmax перед следующим подъемом. Эта скорость затем поддерживается на всем участке L, то есть пока транспортное средство находится, например, на крутом подъеме. Это исключают падение его скорости перед подъемом, что могло бы произойти с обычным автоматическим поддержанием постоянной скорости движения, поскольку транспортное средство должна затем пытаться поддерживать установленную скорость vset.
Изобретение также содержит упомянутый выше модуль для определения опорных значений для системы управления транспортным средством, как представлено на фиг. 1. Этот модуль выполнен с возможностью выполнения всех способов этапов, описанных выше для различных вариантов осуществления изобретения. В изобретении, таким образом, предложен модуль, который можно надежно и безопасно использовать в транспортном средстве для регулирования опорных значений, где модуль находится в некотором другом ECU, чем ECU транспортного средства, то есть EMS. Модуль может составлять часть системы управления, опорное значение/значения установочных точек которой предназначено для регулирования или для работы в качестве самостоятельного модуля, отдельного от системы управления.
В соответствии с вариантом осуществления изобретения пороговые значения, которые используются в изобретении, например упомянутые выше пороговые значения для участка L, определяют в модуле вычисления на основе значений, специфичных для транспортного средства, например текущего отношения передачи, текущего веса транспортного средства, кривой максимального крутящего момента, механического трения и/или сопротивления при движении транспортного средства с заданной скоростью. Пороговые значения, используемые в настоящем изобретении, также могут быть определены, по меньшей мере, частично, на основе выбора режима движения транспортного средства. Таким образом, пороговые значения могут быть определены на основе состояния транспортного средства во время и/или на основе выбора режима движения водителем. Необходимые сигналы для определения этих значений могут быть получены из CAN или могут отслеживаться с помощью любых соответствующих датчиков.
В соответствии с вариантом осуществления характеристики сегментов маршрута содержат их длину и градиент, и модуль вычисления выполнен с возможностью вычисления пороговых значений lmin и lmax градиента. Таким образом, скорость транспортного средства можно заранее регулировать на волнистой дороге для движения с экономией топлива.
Модуль горизонта, предпочтительно, выполнен с возможностью непрерывного определения горизонта при планировании маршрута для транспортного средства, модуль вычисления в котором выполнен с возможностью непрерывного выполнения этапов вычисления, для вычисления и обновления опорных значений для системы управления для всей длины внутреннего горизонта. В варианте осуществления горизонт, поэтому, строят бит за битом, по мере того как транспортное средство движется вдоль дороги, находящейся впереди. Значения/опорные значения установленной точки для системы управления рассчитывают и обновляют непрерывно, независимо от того, добавились ли новые сегменты маршрута или нет, поскольку ссылки, которые должны быть рассчитаны, также зависят от того, как меняются значения, специфичные для транспортного средства, вдоль маршрута.
Настоящее изобретение не ограничено описанными выше вариантами осуществления. Могут использоваться различные альтернативы, модификации и эквиваленты. Упомянутые выше варианты осуществления, поэтому, не ограничивают объем изобретения, который определен приложенной формулой изобретения.
Реферат
Для определения опорного значения, которое указывает, как следует влиять на скорость транспортного средства (ТС), выполняют следующие этапы: получение первого прогноза V_T_и второго прогноза V_T_скорости ТС вдоль горизонта, упомянутый первый прогноз основан на крутящем моменте двигателя T, который тормозит ТС, по сравнению с обычным автоматическим поддержанием постоянной скорости движения, и упомянутый второй прогноз основан на крутящем моменте двигателя T, который ускоряет ТС по сравнению с обычным автоматическим поддержанием постоянной скорости движения; сравнение упомянутого соответствующего первого прогноза V_T_и второго прогноза V_T_скорости ТС с нижним предельным значением vи/или верхним предельным значением v, которые ограничивают диапазон, в пределах которого должна находиться скорость ТС, со значением смещения V, добавленным к упомянутому нижнему и/или верхнему предельным значениям vи v, если ТС находится на сегменте маршрута, который содержит крутой холм; и определение опорного значения на основе, по меньшей мере, одного из упомянутых соответствующих сравнений и упомянутого первого прогноза V_T_и второго прогноза V_T_скорости ТС вдоль горизонта. Обеспечивается улучшенное автоматическое поддержание постоянной скорости движения ТС, когда его скорость должна прогнозироваться логической автоматической схемой для поддержания постоянной скорости и одновременно с этим должна регулироваться регулятором, в частности, для исключения ненужного впрыска топлива в двигатель из-за нестабильного сигнала управления в системе управления двигателем. 2 н. и 22 з.п. ф-лы, 4 ил.
Формула
отличающийся тем, что содержит этапы, на которых:
- делают первый прогноз Vpred_Tnew_ret и второй прогноз Vpred_Tnew_acc скорости транспортного средства вдоль горизонта, упомянутый первый прогноз основан на крутящем моменте Tret двигателя, который замедляет транспортное средство по сравнению с обычным автоматическим поддержанием постоянной скорости движения, и упомянутый второй прогноз основан на крутящем моменте Tacc двигателя, который ускоряет транспортное средство по сравнению с обычным автоматическим поддержанием постоянной скорости движения;
- сравнивают упомянутый соответствующий первый прогноз Vpred_Tnew_ret и второй прогноз Vpred_Tnew_acc скорости транспортного средства с нижним предельным значением vmin и/или верхним предельным значением vmax, которые ограничивают диапазон, в пределах которого должна находиться скорость транспортного средства, со смещением Voffset, добавленным к упомянутому нижнему и/или верхнему предельным значениям vminи vmax, если транспортное средство находится на сегменте маршрута, который содержит крутой холм; и
- определяют, по меньшей мере, одно опорное значение на основе, по меньшей мере, одного из упомянутых соответствующих сравнений и упомянутого первого прогноза Vpred_Tnew_ret и второго прогноза Vpred_Tnew_acc скорости транспортного средства вдоль горизонта.
- скорости транспортного средства и/или
- примененного режима движения.
- скорости транспортного средства и/или
- примененного режима движения.
- делать первый прогноз Vpred_Tnew_ret и второй прогноз Vpred_Tnew_acc скорости автомобиля вдоль горизонта, упомянутый первый прогноз основан на крутящем моменте Tret двигателя, который замедляет транспортное средство по сравнению с обычным автоматическим поддержанием постоянной скорости движения, и упомянутый второй прогноз основан на крутящем моменте Тасс двигателя, который ускоряет транспортное средство по сравнению с обычным автоматическим поддержанием постоянной скорости движения;
- сравнивать упомянутый соответствующий первый прогноз Vpred_Tnew_ret и второй прогноз Vpred_Tnew_acc скорости транспортного средства с нижним предельным значением vmin и/или верхним предельным значением vmax, которые ограничивают диапазон, в пределах которого должна находиться скорость транспортного средства, со смещением Voffset, добавленным к упомянутому нижнему и/или верхнему предельным значениям vmin и vmax, если транспортное средство находится на сегменте маршрута, который содержит крутой холм; и
- определять, по меньшей мере, одно опорное значение на основе, по меньшей мере, одного из упомянутых соответствующих сравнений и упомянутого первого прогноза Vpred_Tnew_ret и второго прогноза Vpred_Tnew_acc скорости транспортного средства вдоль горизонта.
- скорости транспортного средства и/или
- примененного режима движения.
- скорости транспортного средства и/или
- примененного режима движения.
Комментарии