Устройство захвата и аппарат транспортировки - RU2717873C2
Код документа: RU2717873C2
Чертежи
















Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Описанные здесь варианты осуществления относятся в целом к устройству захвата для захвата изделия и аппарату транспортировки, включающему в себя устройство захвата.
УРОВЕНЬ ТЕХНИКИ
В логистическом складе и пр. можно использовать аппарат для перемещения изделий, например, товаров, в пункт назначения, например, полку или ленту транспортера. Аппарат, например, роботизированная рука, присоединенная к устройству захвата, например, многопальцевому устройству захвата или устройству удержания путем всасывания, использовалось для перемещения различных изделий.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - вид в перспективе, демонстрирующий аппарат транспортировки согласно варианту осуществления.
Фиг. 2 - вид в перспективе, демонстрирующий аппарат транспортировки варианта осуществления.
Фиг. 3 - вид в перспективе, демонстрирующий устройство захвата, используемое в аппарате транспортировки варианта осуществления.
Фиг. 4 - блок-схема, демонстрирующая конфигурацию аппарата транспортировки согласно варианту осуществления.
Фиг. 5 - вид спереди, демонстрирующий устройство захвата, используемое в аппарате транспортировки варианта осуществления.
Фиг. 6-11 - виды в перспективе, демонстрирующие изделия различной формы.
Фиг. 12 - вид в перспективе, демонстрирующий состояние, в котором устройство захвата варианта осуществления находится в положении захвата в первом режиме захвата.
Фиг. 13 - вид в перспективе, демонстрирующий состояние, в котором устройство захвата варианта осуществления захватывает другое изделие в положении захвата в первом режиме захвата.
Фиг. 14 - вид в перспективе, демонстрирующий состояние, в котором устройство захвата варианта осуществления захватывает другое изделие в положении захвата в первом режиме захвата.
Фиг. 15 - вид в перспективе, демонстрирующий состояние, в котором устройство захвата варианта осуществления захватывает изделие в положении захвата во втором режиме захвата.
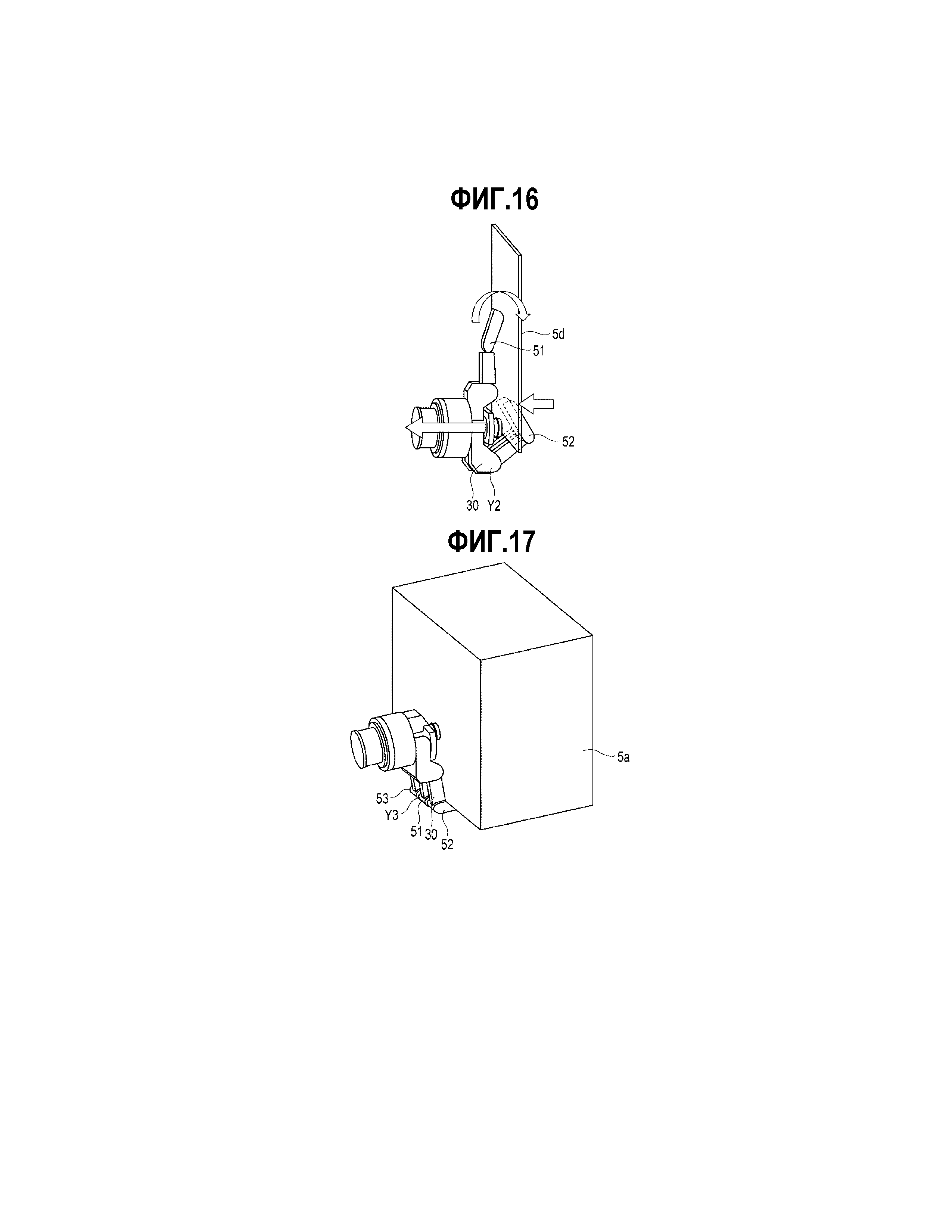
Фиг. 16 - вид в перспективе, демонстрирующий состояние, в котором устройство захвата варианта осуществления захватывает другое изделие в положении захвата во втором режиме захвата.
Фиг. 17 - вид в перспективе, демонстрирующий состояние, в котором устройство захвата согласно варианту осуществления захватывает изделие в положении захвата в третьем режиме захвата.
Фиг. 18 - вид в перспективе, демонстрирующий состояние, в котором устройство захвата согласно варианту осуществления захватывает другое изделие в положении захвата в третьем режиме захвата.
Фиг. 19 - вид в перспективе, демонстрирующий состояние, в котором устройство захвата варианта осуществления захватывает другое изделие в положении захвата в третьем режиме захвата.
Фиг. 20 - блок-схема последовательности операций, демонстрирующая операцию аппарата транспортировки варианта осуществления.
Фиг. 21 - блок-схема последовательности операций, демонстрирующая основной участок операции аппарата транспортировки варианта осуществления.
Фиг. 22 - вид в перспективе, демонстрирующий операцию в которой аппарат транспортировки варианта осуществления захватывает изделие в первом режиме управления.
Фиг. 23 - вид в перспективе, демонстрирующий операцию в которой аппарат транспортировки варианта осуществления захватывает изделие в первом режиме управления.
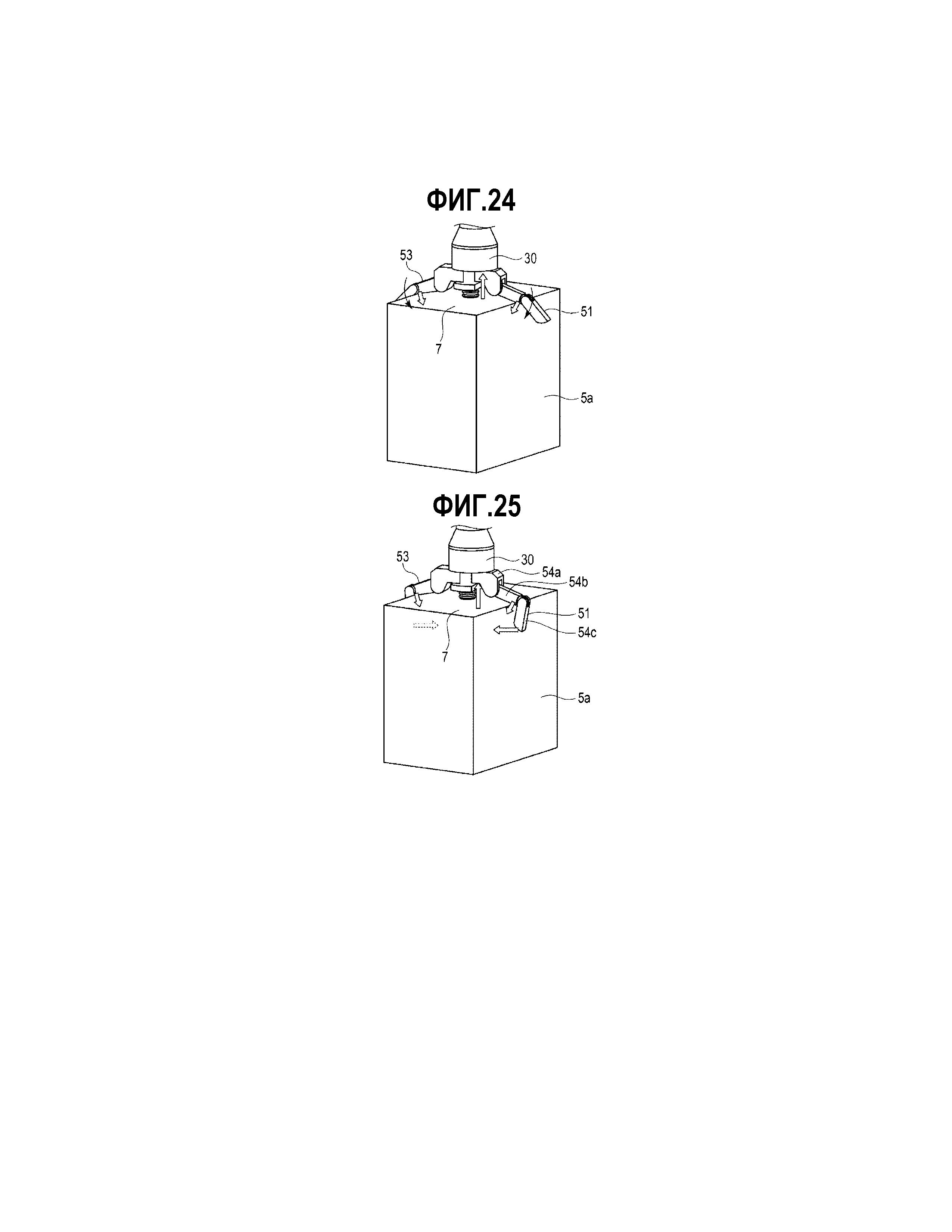
Фиг. 24 - вид в перспективе, демонстрирующий операцию в которой аппарат транспортировки варианта осуществления захватывает изделие в первом режиме управления.
Фиг. 25 - вид в перспективе, демонстрирующий операцию в которой аппарат транспортировки варианта осуществления захватывает изделие в первом режиме управления.
Фиг. 26 - блок-схема последовательности операций, демонстрирующая основной участок операции аппарата транспортировки варианта осуществления.
Фиг. 27 - вид в перспективе, демонстрирующий операцию во втором режиме управления аппарата транспортировки варианта осуществления.
Фиг. 28 - вид в перспективе, демонстрирующий операцию во втором режиме управления аппарата транспортировки варианта осуществления.
Фиг. 29 - вид в перспективе, демонстрирующий состояние, в котором устройство захвата варианта осуществления захватывает другое изделие в положении захвата в четвертом режиме захвата.
ПОДРОБНОЕ ОПИСАНИЕ
[0004] Варианты осуществления предусматривают устройство захвата, которое может захватывать изделие независимо от формы и положения изделия, и аппарат транспортировки, включающий в себя устройство захвата.
[0005] В общем случае, согласно варианту осуществления, аппарат транспортировки содержит: устройство обнаружения изделия для обнаружения изделия и обеспечения информации, относящейся к форме, положению и размеру изделия; устройство захвата, которое включает в себя: участок основания, имеющий участок ладони, участок всасывания на участке ладони, первый палец на первой стороне участка ладони, второй палец на второй стороне участка ладони, причем участок ладони находится между первым и вторым пальцами, причем оба из первого и второго пальцев имеют сочленение и способны сближаться и удаляться друг от друга, и механизм привода, который сближает первый и второй пальцы друг с другом и удаляет их друг от друга; устройство подачи отрицательного давления для подачи отрицательного давления на участок всасывания; устройство перемещения для перемещения устройства захвата; устройство распознавания, которое измеряет форму, положение и размер изделия на основании информации от устройства обнаружения изделия; устройство генерации плана операций, выполненное с возможностью выбора поверхности всасывания на изделии, подлежащем всасыванию участком всасывания, и установления положения захвата для устройства захвата на основании измерений устройством распознавания, причем положение захвата включает в себя положение первого и второго пальцев; и устройство управления, выполненное с возможностью управления устройством захвата и устройством перемещения для получения положения захвата, установленного устройством генерации плана операций.
[0007] Аппарат 10 транспортировки согласно некоторым иллюстративным вариантам осуществления будет описано со ссылкой на фиг. 1-29.
На фиг. 1 показан вид в перспективе, демонстрирующий аппарат 10 транспортировки. На фиг. 2 показан вид в перспективе, демонстрирующий аппарат 10 транспортировки. На фиг. 2 показано состояние, в котором аппарат 10 транспортировки наблюдается под другим углом, чем на фиг. 1. На фиг. 3 показан вид в перспективе, демонстрирующий устройство 30 захвата, используемое в аппарате 10 транспортировки. На фиг. 4 показана блок-схема, демонстрирующая конфигурацию аппарата 10 транспортировки.
[0008] На фиг. 5 показан вид спереди, демонстрирующий устройство 30 захвата. На фиг. 6 показан вид в перспективе, демонстрирующий изделие 5a. На фиг. 7 показан вид в перспективе, демонстрирующий другое изделие 5b. На фиг. 8 показан вид в перспективе, демонстрирующий другое изделие 5b. На фиг. 9 показан вид в перспективе, демонстрирующий другое изделие 5c. На фиг. 10 показан вид в перспективе, демонстрирующий другое изделие 5c. На фиг. 11 показан вид в перспективе, демонстрирующий другое изделие 5d.
[0009] На фиг. 12 показан вид в перспективе, демонстрирующий состояние, в котором устройство 30 захвата захватывает изделие 5 и захватывает изделие 5a в положении захвата в первом режиме Y1 захвата. На фиг. 13 показан вид в перспективе, демонстрирующий состояние, в котором устройство 30 захвата захватывает другое изделие 5c в положении захвата в первом режиме Y1 захвата. На фиг. 14 показан вид в перспективе, демонстрирующий состояние, в котором устройство 30 захвата захватывает другое изделие 5d в положении захвата в первом режиме Y1 захвата.
[0010] На фиг. 15 показан вид в перспективе, демонстрирующий состояние, в котором устройство 30 захвата захватывает изделие 5 в положении захвата во втором режиме Y2 захвата. На фиг. 16 показан вид в перспективе, демонстрирующий состояние, в котором устройство 30 захвата захватывает другое изделие 5d в положении захвата во втором режиме Y2 захвата. На фиг. 17 показан вид в перспективе, демонстрирующий состояние, в котором устройство 30 захвата захватывает изделие 5a в положении захвата в третьем режиме Y3 захвата. На фиг. 18 показан вид в перспективе, демонстрирующий состояние, в котором устройство 30 захвата захватывает другое изделие 5b в положении захвата в третьем режиме Y3 захвата. На фиг. 19 показан вид в перспективе, демонстрирующий состояние, в котором устройство 30 захвата захватывает другое изделие 5c в положении захвата в третьем режиме Y3 захвата. На фиг. 29 показан вид в перспективе, демонстрирующий состояние, в котором устройство 30 захвата захватывает другое изделие 5d в положении захвата в четвертом режиме захвата Y4.
[0011] Аппарат 10 транспортировки обеспечен, например, на логистическом складе. Аппарат 10 транспортировки выполнен с возможностью транспортировки изделия 5, размещенного в контейнере 6, верхний конец которого открыт, в пункт назначения, например, транспортерную ленту.
[0012] Как показано на фиг. 1 и 2, аппарат 10 транспортировки включает в себя устройство 20 обнаружения изделия, которое формирует изображение (15) в области и может обнаруживать изделие 5 в контейнере 6, устройство 30 захвата, которое может захватывать изделие 5, устройство 60 перемещения, которое может перемещать устройство 30 захвата между контейнером 6 и пунктом назначения, устройство 70 распознавания, которое может измерять форму, размер, положение и позицию изделия 5 на основании результатов обнаружения устройства 20 обнаружения изделия, устройство 80 генерации плана операций, которое генерирует план операций устройства 30 захвата и устройства 60 перемещения на основании результатов обнаружения устройства 70 распознавания, и контроллер 90, который управляет операцией устройства 60 перемещения на основании плана операций, сгенерированного устройством 80 генерации плана операций.
[0013] Устройство 20 обнаружения изделия выполнено с возможностью обнаружения изделия 5 в контейнере 6. Устройством 20 обнаружения изделия является, например, 3D камера. Устройство 20 обнаружения изделия выполнено с возможностью формирования изображения внутреннего пространства контейнера 6 через отверстие 6a контейнера 6.
[0014] Устройство 20 обнаружения изделия установлено над местом установки логистического склада, где установлен контейнер 6. Устройство 20 обнаружения изделия может крепиться к полу, на котором установлено устройство 60 перемещения, например, столбчатой деталью и т.п.Альтернативно, устройство 20 обнаружения изделия может присоединяться к устройству 30 захвата. Альтернативно, устройство 20 обнаружения изделия может присоединяться к устройству 60 перемещения.
[0015] Устройство 20 обнаружения изделия не обязательно сконфигурировано с только одной 3D камерой. Устройство 20 обнаружения изделия может быть сконфигурировано множеством 3D камер. В случае, когда устройство 20 обнаружения изделия сконфигурировано множеством 3D камер, каждая из 3D камер предпочтительно выполнена с возможностью формирования изображения областей, полученных делением внутреннего пространства контейнера 6 на несколько пространств, и все внутреннее пространство контейнера 6 может быть изображено 3D камерами.
[0016] Как показано на фиг. 3, устройство 30 захвата включает в себя участок 31 основания, механизм 40 всасывания, который может всасывать изделие 5 участком 41 всасывания, и механизм 50 зажима, который может зажимать изделие 5 с использованием множества пальцев.
Пальцы механизма 50 зажима соединены с участком 31 основания. Участок 31 основания имеет участок 32 ладони, снабженный участком 41 всасывания. В порядке примера, участок 32 ладони имеет прямоугольную форму в виде спереди. Поверхность 33 участка 32 ладони контактирует с изделием 5 всасываемым посредством участка 41 всасывания. Поверхность 33 формируется на плоской поверхности в порядке примера в настоящем варианте осуществления для стабилизации положения изделия 5, всасываемого участком 41 всасывания. Поверхность 33 не обязательно является плоской. Поверхность 33 может быть сформирована для устойчивой поддержки изделия 5, всасываемого участком 41 всасывания.
[0017] Механизм 40 всасывания имеет участок 41 всасывания, обеспеченный на участке 32 ладони участка 31 основания, и устройство 42 подачи отрицательного давления (показанное на фиг. 1), которое применяет отрицательное давление к участку 41 всасывания.
В порядке примера, один участок 41 всасывания обеспечен в центре участка 32 ладони. Участок 41 всасывания выполнен в форме трубки, которая может удлиняться и сокращаться в своем осевом направлении. Участок 41 всасывания может сокращаться в осевом направлении участка 41 всасывания, например, пока торцевая поверхность его оконечности не выровняется или, по существу, не выровняется с поверхностью 33 участка 32 ладони. Кроме того, поскольку участок 41 всасывания может сокращаться, участок 41 всасывания может возвращаться в первоначальное состояние. В порядке примера, участок 41 всасывания выполнен в столбчатой форме гармошки из упругого материала.
[0018] Участок 41 всасывания располагается, например, в позиции, сдвинутой в поперечном направлении участка 32 ладони относительно центра участка 32 ладони. Позиция участка 41 всасывания относительно участка 31 основания и количество участков 41 всасывания не ограничиваются конкретной позицией и конкретным числом.
[0019] Как показано на фиг. 4, устройство 42 подачи отрицательного давления имеет компрессор 43, клапан 44, генератор 45 вакуума и датчик 46 давления. Компрессор 43 подключен к участку 41 всасывания трубой 47. Сжатый воздух из компрессора 43 поступает на участок 41 всасывания по трубе 47.
[0020] В трубе 47 обеспечен клапан 44, который соединяет компрессор 43 с участком 41 всасывания и выполнен с возможностью переключения между открытым состоянием трубы 47 и закрытым состоянием трубы 47 герметичным образом. Открывание трубы 47 позволяет подавать воздух, сжатый компрессором 43, на участок 41 всасывания. Когда труба 47 закрыта герметичным образом, компрессор 43 и участок 41 всасывания разделены герметичным образом, и сжатый воздух из компрессора 43 не может поступать на участок 41 всасывания.
[0021] Генератором 45 вакуума является насос.Генератор 45 вакуума подключен к участку 41 всасывания, например, трубой 47. В частности, генератор 45 вакуума подключен к участку трубы 47 между клапаном 44 и участком 41 всасывания. Генератор 45 вакуума сконфигурирован таким образом, что отрицательное давление можно применять к участку 41 всасывания по трубе 47.
[0022] Труба 47 располагается, например, в роботизированной руке, служащей устройством 60 перемещения, и на участке 31 основания. Труба 47 не обязательно располагается внутри устройства 60 перемещения и участка 31 основания. В другом примере, труба 47 может располагаться вне устройства 60 перемещения и участка 31 основания. Труба 47, предпочтительно, располагается так, чтобы не мешать операции устройства 60 перемещения и операции механизма 40 всасывания.
[0023] Датчик 46 давления выполнен с возможностью измерения давления внутри участка 41 всасывания. В настоящем варианте осуществления, например, датчик 46 давления обеспечен на участке между клапаном 44 трубы 47 и участком 41 всасывания и измеряет давление на участке 41 всасывания путем измерения давления в трубе 47.
[0024] Как показано на фиг. 3-5, механизм 50 зажима представляет собой многопальцевую руку, пальцы которой поддерживаются участком 31 основания. Пальцы обеспечивают, по меньшей мере, одну комбинацию из двух пальцев, способных зажимать изделие 5 путем перемещения в направлениях друг к другу и друг от друга. В настоящем варианте осуществления, механизм 50 зажима имеет первый палец 51, второй палец 52 и третий палец 53 в качестве пальцев во множестве пальцев.
[0025] Первый палец 51 и второй палец 52 располагаются по обе стороны участка 32 ладони с участком 41 всасывания, расположенным между ними. Третий палец 53 располагается рядом со вторым пальцем 52. Первый палец 51 и второй палец 52 образуют комбинацию из двух пальцев, способных зажимать изделие 5. Аналогично, первый палец 51 и третий палец 53 образуют комбинацию из двух пальцев, способных зажимать изделие 5. Как описано выше, механизм 50 зажима имеет, например, две комбинации из двух пальцев, способных зажимать изделие 5.
[0026] Первый палец 51, второй палец 52 и третий палец 53 имеют одинаковую конфигурацию. Поэтому для примера будет описан первый палец 51. Конфигурация второго пальца 52 и конфигурация третьего пальца 53 обозначены теми же ссылочными позициями, что и конфигурация первого пальца 51, и их описание опущено.
[0027] Первый палец 51 имеет основное тело 54 пальца, механизм 55 привода (показанный на фиг. 4) для приведения в действие основного тела 54 пальца и датчик 56 крутящего момента.
Основное тело 54 пальца включает в себя множество узлов, и эти узлы соединены с возможностью вращения. В настоящем варианте осуществления, основное тело 54 пальца включает в себя участок 54a конфигурации первого пальца, прикрепленный к участку 31 основания, участок 54b конфигурации второго пальца, соединенный с возможностью вращения с участком 54a конфигурации первого пальца, и участок 54c конфигурации третьего пальца, соединенный с возможностью вращения с концевым участком участка 54b конфигурации второго пальца.
[0028] Участок 54a конфигурации первого пальца прикреплен к участку 31 основания и располагается в позиции напротив центра одного края 34 в продольном направлении вдоль продольного направления участка 32 ладони в порядке примера. Участок 54a конфигурации первого пальца может быть сформирован совместно с участком 31 основания.
[0029] В порядке примера, участок 54b конфигурации второго пальца выполнен в форме, длинной в одном направлении (удлиненной). Один концевой участок участка 54b конфигурации второго пальца соединен с возможностью вращения с участком 54a конфигурации первого пальца. Другими словами, участок 54b конфигурации второго пальца и участок 54a конфигурации первого пальца образуют первое сочленение 57a, которое позволяет участку 54b конфигурации второго пальца вращаться относительно участка 54a конфигурации первого пальца. Ось C1 вращения (фиг.5) участка 54b конфигурации второго пальца, в порядке примера, располагается параллельно продольному направлению участка 32 ладони.
[0030] В порядке примера, участок 54c конфигурации третьего пальца выполнен в форме, длинной в одном направлении. Один концевой участок участка 54c конфигурации третьего пальца соединен с возможностью вращения к другому концевому участку участка 54b конфигурации второго пальца. Другими словами, благодаря участку 54c конфигурации третьего пальца и участку 54b конфигурации второго пальца, сконфигурировано второе сочленение 57b, позволяющее участку 54c конфигурации третьего пальца вращаться относительно участка 54b конфигурации второго пальца. Ось C2 вращения (фиг. 5) участка 54c конфигурации третьего пальца параллельна оси C1 вращения участка 54b конфигурации второго пальца.
[0031] Основное тело первого 54 пальца, сконфигурированное как описано выше, может переходить между состоянием, в котором участок 54b конфигурации второго пальца и участок 54c конфигурации третьего пальца открыты, параллельны или, по существу, параллельны поверхности 33 участка 32 ладони, и состоянием, в котором участок 54b конфигурации второго пальца и участок 54c конфигурации третьего пальца изгибаются к участку 41 всасывания, то есть состоянием, в котором основное тело первого 54 пальца закрыто за счет наклона к участку 41 всасывания.
[0032] Механизм 55 привода (фиг. 4) имеет блок 55a привода, который генерирует движущую силу, и механизм 55b передачи движущей силы, который передает движущую силу блока 55a привода основному телу 54 пальца. Блоком 55a привода является, например, серводвигатель. Блок 55a привода имеет кодер. Блок 55a привода выполнен с возможностью измерения величины поворота и скорости вращения своим собственным кодером.
[0033] Механизм 55b передачи движущей силы выполнен с возможностью передачи движущей силы от блока 55a привода основному телу 54 пальца. В настоящем варианте осуществления, первый палец 51 является подчиненной приводной системой, в которой вращение участка 54b конфигурации второго пальца и вращение участка 54c конфигурации третьего пальца осуществляются одним блоком 55a привода. Таким образом, механизм 55b передачи движущей силы выполнен с возможностью передачи мощности участку 54b конфигурации второго пальца и участок 54c конфигурации третьего пальца таким образом, что участок 54b конфигурации второго пальца способен вращаться первым сочленением 57a, и участок 54c конфигурации третьего пальца способен вращаться вторым сочленением 57b движущей силой от блока 55a привода. В настоящем варианте осуществления, участок 54c конфигурации третьего пальца приводится в действие подчиненно.
[0034] Механизм 55b передачи движущей силы сконфигурирован любым одним или комбинацией ремня и шкива, провода и шкива, или замедляющей конструкцией, например, редуктором. Кроме того, механизм 55b передачи движущей силы снабжен фрикционной муфтой только на пути передачи мощности к участку 54b конфигурации второго пальца.
[0035] Когда участок 54b конфигурации второго пальца входит в контакт с изделием 5, и вращение участка 54b конфигурации второго пальца в сторону участка 41 всасывания регулируется, фрикционная муфта проскальзывает под действием движущей нагрузки от блока 55a привода. Поскольку движущая сила от блока 55a привода передается только на участок 54c конфигурации третьего пальца благодаря скольжению фрикционной муфты, приводится в действие только участок 54c конфигурации третьего пальца. Таким образом, под действием фрикционной муфты, первый палец 51, второй палец 52 и третий палец 53 могут устойчиво захватывать изделие 5, соответственно, поскольку участок 54b конфигурации второго пальца и участок 54c конфигурации третьего пальца могут смещаться вдоль формы изделия 5.
[0036] Датчик 56 крутящего момента выполнен с возможностью измерения крутящего момента, действующего на узел, расположенный на конце оконечности, то есть участок 54c конфигурации третьего пальца в настоящем варианте осуществления. Датчик 56 крутящего момента может измерять крутящий момент, действующий на участок 54c конфигурации третьего пальца на основании текущего значения блока 55a привода. Способ регистрации крутящего момента датчиком 56 крутящего момента не ограничивается этим способом.
[0037] Кроме того, механизм 50 зажима имеет механизм 58 поддержки второго пальца, который подвижно поддерживает второй палец 52, вдоль внешнего края участка 32 ладони, из начальной позиции P0, указанной сплошной линией на фиг. 5 в первую позицию P1 на стороне первого пальца 51, указанную двухточечно-штриховой линией на фиг. 5. Начальная позиция P0 второго пальца 52 является позицией, противоположной первому пальцу 51 с участком 32 ладони, расположенным между ними.
Кроме того, механизм 50 зажима имеет механизм 59 поддержки третьего пальца который подвижно поддерживает третий палец 53, вдоль внешнего края участка 32 ладони, из начальной позиции P0, указанной сплошной линией на фиг. 5, в первую позицию P1 на стороне первого пальца 51, указанную двухточечно-штриховой линией на фиг. 5. Начальная позиция P0 третьего пальца 53 является позицией, противоположной первому пальцу 51 с участком 32 ладони, расположенным между ними, и является позицией, поперечной второму пальцу 52 в начальной позиции P0. Второй палец 52 и третий палец 53 соединены с участком 31 основания механизмами 58 и 59 поддержки.
[0038] Механизм 58 поддержки второго пальца выполнен с возможностью перемещения между начальной позицией P0 и первой позицией P1 путем вращения второго пальца 52 относительно участка 31 основания. Механизм 58 поддержки второго пальца имеет поворотный вал 58a для поддержки второго пальца 52, чтобы он мог вращаться на участке 31 основания, и блок 58b привода. В настоящем варианте осуществления, блок 58b привода в порядке примера является серводвигателем. Блок 58b привода напрямую или через редуктор и т.п.соединен с поворотным валом 58a. Кроме того, механизм 58 поддержки второго пальца выполнен с возможностью фиксации второго пальца 52 в начальной позиции P0, первой позиции P1, второй позиции P2, расположенной на короткой стороне участка 32 ладони, и третьей позиции P3. Третьей позицией P3 является любая позиция между начальной позицией P0 и второй позицией P2. В настоящем варианте осуществления, третья позиция P3 является, например, позицией, отстоящей на 120 градусов вокруг центра участка 32 ладони относительно первого пальца 51. Конструкция механизма 58 поддержки второго пальца не ограничивается вышеописанной конструкцией. Механизм 58 поддержки второго пальца может перемещать второй палец 52 из начальной позиции P0 в третью позицию P3, вторую позицию P2 и первую позицию P1 и фиксировать второй палец в начальную позицию P0, первую позицию P1, вторую позицию P2 и третью позицию P3.
[0039] Механизм 59 поддержки третьего пальца выполнен с возможностью перемещения между начальной позицией P0 и первой позицией P1 путем вращения третьего пальца 53 относительно участка 31 основания. Механизм 59 поддержки третьего пальца имеет поворотный вал 59a, который с возможностью вращения поддерживает третий палец 53 к участку 31 основания и блоку 59b привода. В настоящем варианте осуществления, блок 59b привода в порядке примера является серводвигателем. Блок 59b привода напрямую или через редуктор и т.п.соединен с поворотным валом 59a. Кроме того, механизм 59 поддержки третьего пальца выполнен с возможностью фиксации третьего пальца 53 в начальной позиции P0, первой позиции P1, второй позиции P2, расположенной на короткой стороне участка 32 ладони, и третьей позиции P3. Третьей позицией P3 является любая позиция между начальной позицией P0 и второй позицией P2. В настоящем варианте осуществления, третья позиция P3 является, например, позицией, отстоящей на 120 градусов вокруг центра участка 32 ладони относительно первого пальца 51. Конструкция механизма 59 поддержки третьего пальца не ограничивается вышеописанной конструкцией. Механизм 59 поддержки третьего пальца может перемещать третий палец 53 из начальной позиции P0 во вторую позицию P2 и первую позицию P1 и может фиксироваться в начальной позиции P0, первой позиции P1, второй позиции P2 и третьей позиции P3.
[0040] Второй палец 52 и третий палец 53 могут фиксироваться в позициях, отличных от позиций P0, P1, P2 и P3, соответственно. Второй палец 52 и третий палец 53 фиксируются в позиции, отличной от позиций P0, P1, P2 и P3, и могут приводиться в действие также в фиксированной позиции. Третья позиция P3 может быть любой позицией при условии, что первый палец 51, второй палец 52 и третий палец 53 располагаются с равными интервалами в периферическом направлении. В настоящем варианте осуществления, пальцы 51, 52 и 53 располагаются с равными интервалами вокруг центра участка 32 ладони.
[0041] Механизм 50 зажима, сконфигурированный, как описано выше, может работать в состоянии любого из первого режима V1 размещения, второго режима V2 размещения, третьего режима V3 размещения и четвертого режима V4 размещения в качестве режима размещения для размещения пальцев 51, 52 и 53.
Первый режим V1 размещения - это состояние, в котором второй палец 52 и третий палец 53 находятся в начальной позиции P0. В первом режиме размещения изделие 5 может зажиматься между первым пальцем 51 и вторым пальцем 52 и между первый палец 51 и третьим пальцем 53. Максимальная ширина W1 зажима механизма 50 зажима в первом режиме V1 размещения равна длине между участками 54b конфигурации второго пальца в положении первого пальца 51, второго пальца 52 и третьего пальца 53, в котором продольное направление участка 54b конфигурации второго пальца параллельно поверхности 33 участка 32 ладони, и участок 54c конфигурации третьего пальца параллелен участку 54b конфигурации второго пальца. Максимальная ширина W1 зажима равна максимальной ширине изделия 5, которое может захватываться механизмом 50 зажима.
[0042] Второй режим V2 размещения - это состояние, в котором второй палец 52 и третий палец 53 находятся в первой позиции P1. Во втором режиме V2 размещения ось C1 вращения каждого из второго пальца 52 и третьего пальца 53 соосна с осью C1 вращения первого пальца 51. Кроме того, во втором режиме V2 размещения, ось C2 вращения каждого из второго пальца 52 и третьего пальца 53 соосна с осью C2 вращения первого пальца 51.
[0043] Третий режим V3 размещения - это состояние, в котором второй палец 52 и третий палец 53 находятся во второй позиции P2. В третьем режиме V3 размещения, второй палец 52 и третий палец 53 противостоят друг другу в продольном направлении участка 32 ладони. Максимальная ширина W2 зажима механизма 50 зажима в третьем режиме V3 размещения равна длине между участками 54b конфигурации второго пальца второго пальца 52 и третьего пальца 53 в положении второго пальца 52 и третьего пальца 53, в котором продольное направление участка 54a конфигурации первого пальца параллельно поверхности 33 участка 32 ладони, и участок 54b конфигурации второго пальца ортогонален участку 54a конфигурации первого пальца. Максимальная ширина W2 зажима больше максимальной ширины W1 зажима.
Четвертый режим V4 размещения - это состояние, в котором второй палец 52 и третий палец 53 находятся в третьей позиции P3. В четвертом режиме размещения пальцы 51, 52 и 53 разнесены на 120 градусов.
[0044] Как показано на фиг. 1, устройство 60 перемещения является, например, шестиосной роботизированной рукой. Устройство 30 захвата прикреплено к концу оконечности устройства 60 перемещения. Другими словами, в устройстве 60 перемещения, устройство 30 захвата прикреплено к линии связи, расположенной на самом дальнем конце. В настоящем варианте осуществления, устройство 60 перемещения может перемещать устройство 30 захвата, и устройство 30 захвата выполнено с возможностью смещения в положении, в котором направление продления средней линии участка 41 всасывания параллельно различным направлениям.
[0045] Устройство 70 распознавания выполнено с возможностью измерения формы, положения, размера и позиции изделия 5 на основании данных изображения, изображаемых устройством 20 обнаружения изделия. В частности, устройство 70 распознавания имеет функцию 1, функцию 2 и функцию 3.
Функция 1 является функцией различения каждого из изделий 5 и обнаружения изделий 5 по одному в случае наличия множества изделий 5 в контейнере 6, на основании данных изображения от устройства 20 обнаружения изделия. Другими словами, функция 1 является функцией обнаружения наличия, например, четырех изделий 5 в случае наличия четырех изделий 5 в контейнере 6. В настоящем варианте осуществления, функция 1 является функцией осуществления обработки изображений на данных изображения, передаваемых от устройства 20 обнаружения изделия, разделения множества изделий 5 в контейнере 6 по одному, и обнаружения изделий 5 по одному. В этом варианте осуществления, любое изделие 5, находящееся в пределах периметра другого изделия 5 при изображении устройством 20 обнаружения изделия в контейнере 6, не распознается.
[0046] Функция 2 является функцией выбора одного изделия 5 из множества изделий 5 в контейнере 6 согласно заранее заданным условиям. Изделие 5, выбранное в функции 2, является изделием 5, подлежащим транспортировке затем аппаратом 10 транспортировки. В этом варианте осуществления, функция 2 является, например, функцией выбора изделия 5, которое очевидно наиболее просто транспортировать, из множества изделий 5.
[0047] В функции 2, выбирается легко транспортируемое изделие 5, которое удовлетворяет заранее заданному условию. Заранее заданное условие, например, состоит в том, что изделие 5 располагается в позиции, которое легко удалить из внутреннего пространства контейнера 6. Условие, соответствующего легкому изъятию из контейнера 6, заранее сохраняется в устройстве 70 распознавания.
[0048] Условие, которое указывает легкое изъятие изделия 5 из внутреннего пространства контейнера 6, может состоять, например, в том, что изделие 5 находится в центре контейнера 6. Дело в том, что изделие 5 в центре контейнера 6 может относительно легко захватываться устройством 30 захвата. Альтернативное условие состоит в том, что изделие 5 располагается в наивысшей позиции в контейнере 6. Для обеспечения вышеописанной функции 2, устройство 70 распознавания измеряет позицию изделий 5 в контейнере 6 и выбирает изделие 5, удовлетворяющее вышеописанным условиям. Кроме того, можно также устанавливать множество условий и выбирать изделия 5, удовлетворяющие дополнительным условиям. Условия, используемые для идентификации изделий 5 как легко транспортируемых, не ограничиваются вышеописанным. Заранее заданные условия могут включать в себя другие помимо легкого изъятия из внутреннего пространства контейнера 6. Кроме того, изделие окончательно выбираемое функцией 2, может быть изделием, отличным от изделия, которое удовлетворяет любому условию, соответствующему легкости транспортировки.
[0049] Функция 3 является функцией измерения формы, положения, размера и позиции изделия 5, выбранного функцией 2. В частности, функция 3 является функцией осуществления обработки изображений на данных изображения, изображаемых устройством 20 обнаружения изделия и измерения формы, положения, размера и позиции изделия 5, которое выбрано функцией 2.
[0050] В случае, когда любое из формы, положения, размера и позиции изделия 5 измеряется для функции 2, можно повторно использовать измеренную информацию, не обязательно измеренную, опять же, в функции 3, и информацию, измеренную в функции 2.
[0051] Форма изделия 5 является, например, формой, в которой внешний вид является формой четырехугольной призмы (включающей в себя прямоугольный параллелепипед и куб), как показано на фиг. 6. Ссылочная позиция 5a обозначает изделие, имеющее форму квадратная призма. Согласно варианту осуществления, показанному на фиг. 7 и 8, внешняя форма изделия 5 является столбчатой. Изделие, внешний вид которого является столбчатой формой, обозначается ссылочной позицией 5b. Согласно варианту осуществления, показанному на фиг. 9 и 10, внешняя форма изделия 5 является треугольной призмой. Изделие, внешний вид которого является формой треугольной призмы обозначается ссылочной позицией 5c.
[0052] Согласно варианту осуществления, показанному на фиг. 11, внешняя форма изделия 5 является пластиной. Изделие, внешний вид которого является формой пластины, обозначается ссылочной позицией 5d. Условие для определения в качестве формы пластины состоит в том, что толщина меньше заранее заданного порогового значения. Другими словами, в случае, когда толщина изделия 5d меньше заранее заданного порогового значения, устройство 70 распознавания определяет, что форма изделия 5d является формой пластины. Форма изделия 5 может отличаться от форм, показанных на вышеописанных фиг. 6-11. Согласно варианту осуществления изделие имеет форму призмы с призматической торцевой поверхностью, которая имеет пять углов и т.п., например, пятиугольной колонны.
[0053] В настоящем варианте осуществления, информация о форме изделия 5 заранее сохраняется в устройстве 70 распознавания. Сохраненная информация является, например, информацией, указывающей форму четырехугольной призмы, форму треугольной призмы, столбчатую форму и форму пластины. Функция 3 также различает форму изделия 5 на основании информации, указывающей различные формы, описанные выше и сохраненные заранее в устройстве 70 распознавания, и информации о форме изделия 5, полученной посредством обработки изображений. Изделие 5 может не иметь форму четырехугольной призмы, форму треугольной призмы, столбчатую форму или форму пластины. В случае, когда изделие 5 не имеет ни форму четырехугольной призмы, ни форму треугольной призмы, ни форму пластины, устройство 70 распознавания классифицирует изделие 5 к форме, ближайшей к форме четырехугольной призмы, треугольной форме или форме пластины.
[0054] Как показано на фиг. 6-11, положение изделия 5 может быть положением, в котором верхняя поверхность 7 является плоской поверхностью, или положением, в котором верхняя поверхность не является плоской поверхностью. Другими словами, в случае, когда форма является столбчатой формой, как для изделия 5b, изделие 5 может представлять верхнюю поверхность 7 как плоскую поверхность, как показано на фиг. 7, или может иметь ось, параллельную горизонтальному направлению, например, как показано на фиг. 8, в которой верхняя поверхность 7 искривлена.
[0055] Кроме того, в случае, когда форма изделия 5c является треугольной призмой, как показано на фиг. 9, изделие 5 может представлять верхнюю поверхность 7, включающую в себя одну поверхность или положение, сконфигурированное двумя поверхностями 8, как показано на фиг. 10. Упомянутая здесь поверхность 8 является поверхностью, имеющей форму четырехугольной призмы. Таким образом, функция 3 также измеряет положение изделия 5 и задает верхнюю поверхность изделия 5.
В качестве способа измерения положения можно использовать, например, способ обнаружения с использованием углов Эйлера. Альтернативно, положение изделия 5 можно измерять из данных изображения, обнаруженных устройством 20 обнаружения изделия. Альтернативно, в настоящем варианте осуществления, поскольку устройством 20 обнаружения изделия является 3D камера, в порядке примера, положение изделия 5 можно измерять из данных группы точек, полученных от устройства 20 обнаружения изделия. В качестве способа задания верхней поверхности изделия 5, определяется, что поверхность, имеющая вектор, в которой ортогональный вектор параллелен направлению вертикально вниз из всех поверхностей изделия, является верхней поверхностью. Согласно варианту осуществления, определяется, что плоскость, где ортогональный вектор является ближайшим в вертикальном направлении вниз, является верхней поверхностью. Этот способ определения верхней поверхности является лишь примером и не ограничивается этим.
[0056] В настоящем варианте осуществления, размер изделия 5 может быть размером конкретного участка изделия 5, определенным на основании формы и положения изделия 5. Таким образом, функция 3 также измеряет размер такого конкретного участка, который может определяться на основании формы и положения изделия 5.
Далее будет объяснен конкретный участок изделия 5 в этом контексте. В настоящем варианте осуществления, устройство 30 захвата перемещается вверх относительно изделия 5, расположенного в контейнере 6, и если операция захвата возможна из состояния, в котором устройство захвата располагается над изделием 5, верхний участок изделия 5 может зажиматься механизмом 50 зажима. Таким образом, конкретный участок этого изделия 5 в этом случае является верхним участком изделия 5, находящегося в контейнере 6. Будет описан аспект функции 3, включающей в себя операцию устройства 70 распознавания. Как показано на фиг. 6, функция 3 измеряет длину 8a длинной стороны, длину 8b короткой стороны верхней поверхности 7 и высоту H изделия 5 относительно изделия 5, которое имеет форму четырехугольной призмы.
[0057] Кроме того, функция 3 измеряет диаметр D верхней поверхности 7 и высоту H изделия 5b относительно изделия 5b, имеющего столбчатую форму, имеет положение, в котором его верхняя поверхность является плоской поверхностью, как показано на фиг. 7. Кроме того, как показано на фиг. 8, функция 3 измеряет диаметр D и длину L в осевом направлении торцевой поверхности 9 относительно изделия 5b, которое имеет столбчатую форму и имеет положение, в котором верхняя поверхность 7 является искривленной поверхностью.
[0058] Кроме того, как показано на фиг. 9, функция 3 измеряет длины 9a, 9b и 9c трех сторон верхней поверхности 7, и высота H изделия 5c относительно изделия 5c, которое имеет форму треугольной призмы и имеет положение, в котором верхняя поверхность 7 является плоской поверхностью. Кроме того, как показано на фиг. 10, функция 3 измеряет длину L в осевом направлении и каждую из длин четырех сторон обеих поверхностей 8 относительно изделия 5c, которое имеет форму треугольной призмы и имеет положение, в котором верхняя поверхность 7 включает в себя две поверхности 8. Кроме того, как показано на фиг. 11, функция 3 является функцией измерения длины длинной стороны верхней поверхности 7 относительно изделия 5d, имеющего форму пластины.
В настоящем варианте осуществления, функция 3 измеряет размер участков, описанных выше как указанный участок для классификации изделия 5 в одну из формы четырехугольной призмы, формы треугольной призмы, столбчатой формы и формы прямоугольной пластины, и заранее указывает участок, подлежащий зажатию механизмом 50 зажима согласно форме и размеру. По этой причине, измерение размера только конкретного участка функцией 3 является примером, и настоящий вариант осуществления не ограничивается этим. Функция 3 может измерять размер не только конкретного участка изделия 5, но и всех участков изделия 5.
[0059] Позиция изделия 5 измерялась функцией 2 в настоящем варианте осуществления. По этой причине, информация о позиции измеренный функцией 2 повторно используется относительно позиции изделия 5.
[0060] Устройство 80 генерации плана операций определяет поверхность всасывания на основании результата обнаружения устройства 70 распознавания, определяет режим захвата, определяет всасываемый участок 4, подлежащий всасыванию участком 41 всасывания в изделии 5, и генерирует положение захвата устройства 30 захвата, положение подготовки к захвату устройства 30 захвата, план захвата и план траектории устройства 60 перемещения. Описанная здесь поверхность всасывания базируется на состоянии, в котором поверхность всасывания располагается в контейнере 6 изделия 5. Другими словами, она не базируется на положении изделия 5, которое захватывается устройством 30 захвата и которое находится в состоянии, в котором устройство 30 захвата находится в положении захвата. По этой причине, например, даже в случае, когда поверхность всасывания установлена как верхняя поверхность, поверхность всасывания может устанавливаться как боковая поверхность в положении захвата.
Объяснение определения поверхности всасывания, объяснение режима захвата и объяснение всасываемого участка
[0061] Режимы захвата включают в себя первый режим Y1 захвата, второй режим Y2 захвата и третий режим Y3 захвата.
Первый режим Y1 захвата является режимом захвата, который зажимает изделие 5 поверхностью, которая становится боковой поверхностью, обращенной к поверхности всасывания механизмом 50 зажима в первом режиме V1 размещения, третьем режиме V3 размещения или четвертом режиме V4 размещения, как показано на фиг. 12, 13 и 14.
Второй режим Y2 захвата является режимом захвата, который поддерживает нижний конец изделия 5 пальцами 52 и 53 механизма 50 зажима и поддерживает поверхность всасывания первым пальцем 51 в первом режиме V1 размещения, как показано на фиг. 15 и 16.
Третий режим Y3 захвата является режимом захвата, который поддерживает нижний конец изделия 5 механизмом 50 зажима во втором режиме V2 размещения, как показано на фиг. 17.
[0062] Участок, подлежащий всасыванию участком 41 всасывания, когда устройство 30 захвата работает в выбранном режиме захвата, установлен как всасываемый участок 4. Другими словами, всасываемый участок 4 является участком, где устройство 30 захвата может захватывать изделие 5 согласно выбранному режиму захвата.
[0063] Далее будут описаны выбор режима захвата и определение всасываемого участка 4. В случае, когда изделие 5, находящееся в контейнере 6, может захватываться сверху, устройство 80 генерации плана операций устанавливает верхнюю поверхность 7 изделия 5 как поверхность всасывания. В частности, как показано на фиг. 6, устройство 80 генерации плана операций определяет верхнюю поверхность 7 в качестве поверхности всасывания, подлежащей всасыванию участком 41 всасывания относительно изделия 5a, имеющим форму четырехугольной призмы. В случае, когда длина 8b короткой стороны верхней поверхности 7 изделия 5a меньше или равна максимальной ширине W2 зажима механизма 50 зажима в третьем режиме V3 размещения, выбирается первый режим Y1 захвата. В случае нахождения в первом режиме Y1 захвата, участок 41 всасывания располагается в промежуточной позиции между пальцем 51 и пальцами 52 и 53. Таким образом, устройство 80 генерации плана операций определяет центр верхней поверхности 7 изделия 5a в качестве всасываемого участка 4. Таким образом, устройство 80 генерации плана операций определяет всасываемый участок 4 на основании выбранного режима захвата.
[0064] В случае, когда длина 8b короткой стороны верхней поверхности 7 больше максимальной ширины W2 зажима механизма 50 зажима в третьем режиме V3 размещения, устройство 80 генерации плана операций выбирает второй режим Y2 захвата или третий режим Y3 захвата. В частности, в случае, когда вес изделия 5a больше заранее заданного порогового значения, устройство 80 генерации плана операций выбирает третий режим Y3 захвата. Дело в том, что третий режим Y3 захвата поддерживает нижняя торцевую поверхность изделия 5 тремя пальцами 51, 52 и 53, что позволяет более устойчиво поддерживать тяжелое изделие 5. Устройство 80 генерации плана операций оценивает вес изделия 5a на основании размера изделия 5a, согласно варианту осуществления.
[0065] В случае, когда устройство 80 генерации плана операций выбирает второй режим Y2 захвата, устройство 80 генерации плана операций устанавливает участок, имеющий длину от центра участка 41 всасывания к участку 54c конфигурации третьего пальца пальцев 52 и 53 и от промежуточной позиции большой стороны одной стороны верхней поверхности 7 ко внутренней области верхней поверхности 7, параллельной короткой стороне, к всасываемому участку 4 таким образом, что изделие 5a может захватываться устройством 30 захвата, которое работает во втором режиме Y2 захвата. Путем определения всасываемого участка 4 как вышеописанной позиции, устройство 30 захвата может располагать изделие 5a на участке 54c конфигурации третьего пальца из пальцев 52 и 53. Другими словами, устройство 30 захвата может захватывать изделие 5a во втором режиме Y2 захвата.
[0066] В случае, когда устройство 80 генерации плана операций выбирает третий режим Y3 захвата, устройство 80 генерации плана операций устанавливает участок, имеющий длину от центра участка 41 всасывания к участку 54c конфигурации третьего пальца первого пальца 51 и от промежуточной позиции большой стороны одной стороны верхней поверхности 7 ко внутренней области верхней поверхности 7, параллельной короткой стороне, к всасываемому участку 4 таким образом, что изделие 5a может захватываться устройством 30 захвата, которое работает в третьем режиме Y3 захвата. Путем определения всасываемого участка 4 в вышеописанную позицию, устройство 30 захвата может располагать изделие 5a на участке 54c конфигурации третьего пальца из пальцев 52 и 53. Другими словами, устройство 30 захвата может захватывать изделие 5a в третьем режиме Y3 захвата.
[0067] Как показано на фиг. 7, относительно изделия 5b, имеющего столбчатую форму и положение, в котором верхняя поверхность 7 является плоской поверхностью, верхняя поверхность 7 определяется в качестве поверхности всасывания. В случае, когда диаметр D верхней поверхности 7 изделия 5b меньше или равна максимальной ширине W2 зажима механизма 50 зажима в третьем режиме V3 размещения, выбирается первый режим Y1 захвата. Затем устройство 80 генерации плана операций устанавливает центр верхней поверхности 7 к всасываемому участку 4 таким образом, что изделие 5b может захватываться в первом режиме Y1 захвата. Участок 41 всасывания присасывается к верхней поверхности 7 таким образом, что его средняя линия проходит через центр верхней поверхности 7.
[0068] В случае, когда диаметр D верхней поверхности 7 больше максимальной ширины W2 зажима механизма 50 зажима в третьем режиме V3 размещения, боковая поверхность определяется в качестве поверхности всасывания. Затем устройство 80 генерации плана операций выбирает второй режим Y2 захвата или третий режим Y3 захвата. В частности, в случае, когда определяется, что изделие 5b тяжелее, чем вышеописанный заранее определенный вес, выбирается третий режим Y3 захвата. Затем устройство 80 генерации плана операций устанавливает осевую промежуточную позицию боковой поверхности изделия 5b относительно всасываемого участка 4.
[0069] Как показано на фиг. 8, относительно изделия 5b, имеющего столбчатую форму и положение, в котором верхняя поверхность является искривленной поверхностью, устройство 80 генерации плана операций определяет верхнюю поверхность в качестве поверхности всасывания. Упомянутая здесь верхняя поверхность является верхним участком искривленной поверхности изделия 5b. Боковая поверхность является нижним участком верхней поверхности в периферической поверхности. Затем, в случае, когда внешний диаметр торцевой поверхности меньше или равен максимальной ширине зажима, устройство 80 генерации плана операций выбирает первый режим Y1 захвата.
[0070] В случае, когда внешний диаметр торцевой поверхности больше максимальной ширины зажима, устройство 80 генерации плана операций определяет поверхность всасывания как боковая поверхность. Затем устройство 80 генерации плана операций выбирает второй режим Y2 захвата или третий режим Y3 захвата. В частности, как описано выше, в случае, когда изделие 5b тяжелее, чем заранее определенный вес, устройство 80 генерации плана операций выбирает третий режим Y3 захвата. Затем устройство 80 генерации плана операций устанавливает промежуточную позицию верхней поверхности 7 изделия 5b в осевом направлении относительно всасываемого участка 4.
[0071] Как показано на фиг. 9, относительно изделия 5c, имеющего форму треугольной призмы и положение, в котором верхняя поверхность 7 является плоской поверхностью, когда устройство 80 генерации плана операций определяет, что изделие 5c может зажиматься с верхней стороны механизмом 50 зажима в четвертом режиме V4 размещения, устройство 80 генерации плана операций определяет верхнюю поверхность 7 в качестве поверхности всасывания, и выбирает первый режим Y1 захвата.
[0072] В частности, устройство 80 генерации плана операций имеет информацию об изделии 5c в форме треугольной призмы, которое может зажиматься механизмом 50 зажима в четвертом режиме V4 размещения. В частности, устройство 80 генерации плана операций поддерживает одну боковую поверхность первым пальцем 51 механизма 50 зажима в четвертом режиме V4 размещения, поддерживает одну боковую поверхность вторым пальцем 52, и имеет информацию об изделии 5c, которое может поддерживать одну боковую поверхность третьим пальцем 53. На основании этой информации, устройство 80 генерации плана операций определяет, может ли изделие 5c захватываться сверху механизмом 50 зажима в четвертом режиме V4 размещения. В этом случае, устройство 80 генерации плана операций определяет всасываемый участок 4 верхней поверхности 7 согласно форме верхней поверхности 7. Например, в случае, когда верхняя поверхность 7 является равносторонним треугольником, центр верхней поверхности 7 является всасываемым участком 4, подлежащим всасыванию участком 41 всасывания. Альтернативно, в случае, когда верхняя поверхность 7 не является равносторонним треугольником, позиция, где три боковые поверхности могут устойчиво зажиматься пальцами 51, 52 и 53, установлен как всасываемый участок 4. Другими словами, участок, где механизм 50 зажима в четвертом режиме V4 размещения способен зажимать изделие 5c в первом режиме Y1 захвата, установлен как всасываемый участок 4.
[0073] Когда устройство 80 генерации плана операций определяет, что изделие 5c не может зажиматься механизмом 50 зажима в четвертом режиме V4 размещения, одна из трех боковых поверхностей изделия 5c устанавливается как поверхность всасывания, подлежащая всасыванию участком 41 всасывания. В частности, из трех боковых поверхностей, боковая поверхность, к которой может осуществлять доступ устройство 30 захвата, является поверхностью всасывания. Затем устройство 80 генерации плана операций выбирает второй режим Y2 захвата или третий режим Y3 захвата. В частности, в случае, когда устройство 80 генерации плана операций определяет, что изделие 5c тяжелее, чем заранее определенный вес вышеописанный, устройство 80 генерации плана операций выбирает третий режим Y3 захвата.
[0074] В случае, когда устройство 80 генерации плана операций выбирает второй режим Y2 захвата, устройство 80 генерации плана операций устанавливает промежуточную позицию изделия 5c в осевом направлении на боковой поверхности в качестве поверхности всасывания, и участок, который является длиной от центра участка 41 всасывания к участку 54c конфигурации третьего пальца второго пальца 52 и третьего пальца 53, устанавливается как всасываемый участок 4 от края вовнутрь в осевом направлении на боковой поверхности.
[0075] В случае, когда устройство 80 генерации плана операций выбирает третий режим Y3 захвата, устройство 80 генерации плана операций устанавливает промежуточную позицию изделия 5c в осевом направлении на боковой поверхности в качестве поверхности всасывания, и участок, который является длиной от участка 41 всасывания к участку 54c конфигурации третьего пальца первого пальца 51, устанавливается как всасываемый участок 4 от края вовнутрь в осевом направлении на боковой поверхности.
[0076] Как показано на фиг. 10, относительно изделия 5c, имеющего форму треугольной призмы и положение, в котором верхняя поверхность 7 сконфигурирована двумя поверхностями 8, устройство 80 генерации плана операций определяет поверхность всасывания, в которой длина короткой стороны меньше или равна максимальной ширине W2 зажима механизма 50 зажима в третьем режиме V3 размещения из двух поверхностей 8, которая конфигурирует верхнюю поверхность 7. В случае, когда две поверхности 8 являются поверхностями, длина короткой стороны которых меньше или равна максимальной ширине W2 зажима механизма 50 зажима в третьем режиме V3 размещения, например, выбранная поверхность всасывания имеет большую площадь из двух поверхностей. Затем устройство 80 генерации плана операций выбирает первый режим Y1 захвата и устанавливает центр поверхности всасывания в качестве всасываемого участка 4.
[0077] Кроме того, в случае, когда длина каждой короткой стороны двух поверхностей 8, которая конфигурирует верхнюю поверхность 7, больше максимальной ширины W2 зажима механизма 50 зажима в состоянии третьего режима V3 размещения, устройство 80 генерации плана операций определяет одну из поверхностей 8 в качестве поверхности всасывания. Затем устройство 80 генерации плана операций выбирает второй режим Y2 захвата. Затем устройство 80 генерации плана операций располагается в промежуточной позиции изделия 5c в осевом направлении на поверхности 8, установленной в качестве поверхности всасывания, и устанавливает позицию, которая равна длине от центра участка 41 всасывания к участку 54c конфигурации третьего пальца второго пальца 52 в направлении, параллельном поперечному направлению от края ко внутренней области в продольном направлении поверхности 8 в качестве всасываемого участка 4.
[0078] Как показано на фиг. 11, относительно изделия 5d, имеющего форму пластины, устройство 80 генерации плана операций устанавливает основную поверхность, к которой устройство 30 захвата может осуществлять доступ к поверхности всасывания. Например, как показано на фиг. 11, в случае, когда одна основная поверхность конфигурирует верхнюю поверхность 7, верхняя поверхность 7 устанавливается в качестве поверхности всасывания. Затем устройство 80 генерации плана операций выбирает второй режим Y2 захвата. Затем устройство 80 генерации плана операций устанавливает в качестве всасываемого участка 4 позицию, которая является длиной от центра участка 41 всасывания к участку 54b конфигурации второго пальца второго пальца 52 в направлении, параллельном короткой стороне от промежуточной позиции короткой стороны верхней поверхности 7 вовнутрь вдоль короткой стороны верхней поверхности.
Описание положения захвата
[0079] Далее будет описано положение захвата. Положение захвата указывает позицию устройства 30 захвата, положение устройства 30 захвата, состояние механизма 50 зажима и положения пальцев 51, 52 и 53, которые могут устойчиво захватывать изделие 5 устройством 30 захвата.
Позиция устройства 30 захвата представляется, например, координатами трех осей, ортогональных друг другу. Координаты этих трех осей являются информацией, указывающей позицию, совместно используемую устройством 60 перемещения и устройством 30 захвата. Положение устройства 30 захвата является положением в системе координат трех осей в направлении, в котором проходит средняя линия участка 41 всасывания.
[0080] Устройство 80 генерации плана операций определяет положение захвата на основании позиции всасываемого участка 4 изделия 5 и условий вокруг изделия 5. Условия вокруг изделия 5 это зазоры между изделием 5, подлежащим захвату устройством 30 захвата, и изделием 5, расположенным вокруг устройства захвата, или зазоры между изделием 5, которое становится целью, и внутренней поверхностью контейнера 6.
[0081] В частности, устройство 80 генерации плана операций определяет позицию устройства 30 захвата, которое является элементом положения захвата, согласно позиции изделия 5, которое стало целью. Устройство 80 генерации плана операций определяет положение устройства 30 захвата, которое является элементом положения захвата, согласно к поверхности всасывания изделия 5.
В этом варианте осуществления, устройство 80 генерации плана операций выбирает один из первого режима V1 размещения, второго режима V2 размещения, третьего режима V3 размещения и четвертого режима V4 размещения как состояние механизма 50 зажима, которое является элементом положения захвата, на основании позиции всасываемого участка 4 изделия 5, условий вокруг изделия 5 и режима захвата, выбранного как описано выше.
[0082] Выбор состояния механизма 50 зажима и положения устройства 30 захвата в положении захвата будет описан более подробно. Как показано на фиг. 6, относительно изделия 5a, которое является четырехугольной призмой, устройство 80 генерации плана операций выбирает первый режим V1 размещения, устанавливая случай, когда длина короткой стороны верхней поверхности 7 меньше или равна максимальной ширине W1 зажима механизма 50 зажима в первом режиме V1 размещения, и режим Y1 захвата выбирается для состояния механизма 50 зажима.
[0083] В этом случае, как показано на фиг. 12, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания параллельна направлению вверх и вниз, участок 41 всасывания, всасывающий всасываемый участок 4 и механизм 50 зажима в первом режиме V1 размещения зажимает изделие 5a в направлении, параллельном короткой стороне верхней поверхности 7 в первом режиме Y1 захвата.
[0084] Кроме того, устройство 80 генерации плана операций выбирает третий режим V3 размещения, устанавливая случай, когда короткая сторона верхней поверхности 7 больше максимальной ширины W1 зажима механизма 50 зажима в первом режиме V1 размещения и меньше или равна максимальной ширине W2 зажима механизма 50 зажима в третьем режиме V3 размещения и первый режим Y1 захвата выбирается в качестве состояния механизма 50 зажима.
[0085] В этом случае, положение устройства 30 захвата в положении зажима является положением, в котором средняя линия участка 41 всасывания параллельна направлению вверх и вниз с участком 41 всасывания, всасывающим всасываемый участок 4, и механизмом 50 зажима в третьем режиме V3 размещения зажимающим изделие 5a в направлении, параллельном короткой стороне верхней поверхности 7 в первом режиме Y1 захвата.
[0086] Кроме того, устройство 80 генерации плана операций выбирает первый режим V1 размещения, устанавливая случай, который больше максимальной ширины W2 зажима механизма 50 зажима в третьем режиме V3 размещения, и случай, когда выбирается второй режим Y2 захвата в качестве состояния механизма 50 зажима.
[0087] В этом случае, как показано на фиг. 15, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания параллельна горизонтальному направлению с участком 41 всасывания, всасывающим всасываемый участок 4, и механизмом 50 зажима в первом режиме V1 размещения, всасывающим боковую поверхность изделия 5 во втором режиме захвата. В состоянии, в котором изделие 5 располагается в контейнере 6, поверхность всасывания является верхней поверхностью изделия 5. После того, как участок 41 всасывания всасывает верхнюю поверхность изделия 5, устройство 30 захвата смещается, благодаря чему поверхность всасывания заменяется боковой поверхностью.
[0088] Кроме того, устройство 80 генерации плана операций выбирает второй режим V2 размещения, устанавливая случай, который больше максимальной ширины W2 зажима механизма 50 зажима в третьем режиме V3 размещения, и случай, когда выбирается третий режим Y3 захвата в качестве состояния механизма 50 зажима.
[0089] В этом случае, как показано на фиг. 17, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания является горизонтальным направлением с участком 41 всасывания, всасывающим всасываемый участок 4, и механизмом 50 зажима во втором режиме V2 размещения, поддерживающим нижнюю торцевую поверхность изделия 5 в третьем режиме Y3 захвата. В состоянии, в котором изделие 5 располагается в контейнере 6, поверхность всасывания является верхней поверхностью изделия 5. После того, как участок 41 всасывания всасывает верхнюю поверхность изделия 5, поверхность всасывания заменяется боковой поверхностью смещенным устройством 30 захвата.
[0090] Кроме того, как показано на фиг. 7, относительно изделия 5b, имеющего столбчатую форму, верхняя поверхность 7 которой является плоской поверхностью, устройство 80 генерации плана операций выбирает первый режим V1 размещения в случае, когда диаметр D верхней поверхности 7 меньше или равен максимальной ширине W1 зажима механизма 50 зажима в первом режиме V1 размещения и выбирает первый режим Y1 захвата в качестве состояния механизма 50 зажима.
В этом случае, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания параллельна направлению вверх и вниз, как на фиг. 12.
[0091] Кроме того, устройство 80 генерации плана операций выбирает состояние третьего режима V3 размещения в качестве состояния механизма 50 зажима в случае, когда диаметр D верхней поверхности 7 больше максимальной ширины W1 зажима механизма 50 зажима в состоянии первого режима V1 размещения, меньше или равен максимальной ширине W2 зажима механизма 50 зажима в состоянии третьего режима V3 размещения, и выбирает первый режим Y1 захвата.
В этом случае, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания параллельна направлению вверх и вниз, как на фиг. 12.
[0092] Кроме того, как показано на фиг. 8, относительно изделия 5b, которое имеет столбчатую форму и верхняя поверхность которого 7 искривлена, устройство 80 генерации плана операций выбирает первый режим V1 размещения или третий режим V3 размещения в качестве состояния механизма 50 зажима, как показано на фиг. 13, в случае, когда диаметр торцевой поверхности меньше или равен максимальной ширине W2 зажима механизма 50 зажима в третьем режиме V3 размещения.
[0093] В частности, в случае, когда диаметр торцевой поверхности 9 изделия 5b меньше или равен максимальной ширине W1 зажима механизма 50 зажима в первом режиме V1 размещения и выбирается первый режим Y1 захвата, устройство 80 генерации плана операций выбирает первый режим V1 размещения как состояние механизма 50 зажима. В этом случае, как показано на фиг. 13, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания параллельна направлению вверх и вниз участок 41 всасывания, всасывающий всасываемый участок 4 верхней поверхности, который становится искривленной поверхностью изделия 5b, и механизм 50 зажима первого режима V1 размещения зажимает изделие 5b в радиальном направлении изделия 5b.
[0094] Устройство 80 генерации плана операций выбирает третий режим V3 размещения как состояние механизма 50 зажима, в случае, когда диаметр D торцевой поверхности 9 изделия 5b больше максимальной ширины W1 зажима механизма 50 зажима в первом режиме V1 размещения, меньше или равен максимальной ширине W2 зажима механизма 50 зажима в третьем режиме V3 размещения, и выбирается первый режим Y1 захвата. В этом случае, как в случае фиг. 13, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания параллельна направлению вверх и вниз, участок 41 всасывания, всасывающий всасываемый участок 4 верхней поверхности 7 который становится искривленной поверхностью изделия 5b, и механизм 50 зажима в третьем режиме V3 размещения зажимает изделие 5b в радиальном направлении изделия 5b, как на фиг. 13.
Устройство 80 генерации плана операций выбирает первый режим V1 размещения в качестве состояния механизма 50 зажима в случае, когда диаметр D торцевой поверхности 9 изделия 5b больше максимальной ширины W1 зажима механизма 50 зажима в первом режиме V1 размещения, больше максимальной ширины W2 зажима механизма 50 зажима в третьем режиме V3 размещения, и выбирается второй режим Y2 захвата. В этом случае, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания параллельна горизонтальному направлению, как на фиг. 15.
[0095] Устройство 80 генерации плана операций выбирает второй режим V2 размещения в качестве состояния механизма 50 зажима, в случае, когда диаметр D торцевой поверхности 9 изделия 5b больше максимальной ширины W1 зажима механизма 50 зажима в первом режиме V1 размещения, больше максимальной ширины W2 зажима механизма 50 зажима в третьем режиме V3 размещения, и выбирается третий режим Y3 захвата. В этом случае, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания параллельна горизонтальному направлению, как на фиг. 17.
[0096] Кроме того, как показано на фиг. 9, относительно изделия 5c, которое имеет форму треугольной призмы, и верхняя поверхность 7 которой является плоской поверхностью, устройство 80 генерации плана операций выбирает четвертый режим V4 размещения механизма 50 зажима, в качестве состояния механизма зажима, в случае, когда изделие 5c может зажиматься сверху механизмом 50 зажима в четвертом режиме V4 размещения и выбирается первый режим Y1 захвата.
[0097] В этом случае, как показано на фиг. 19, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания параллельна направлению вверх и вниз участок 41 всасывания, всасывающий всасываемый участок 4 верхней поверхности 7 изделия 5c, первый палец 51 примыкает к одной из трех боковых поверхностей, второй палец 52 примыкает к одной из двух остальных боковых поверхностей, и третий палец 53 примыкает к одной оставшейся боковой поверхности в механизме 50 зажима для зажима изделия 5c.
[0098] Кроме того, устройство 80 генерации плана операций выбирает первый режим V1 размещения в случае определения невозможности захвата изделия 5 механизмом 50 зажима в четвертом режиме V4 размещения и, таким образом, выбирает второй режим Y2 захвата. В этом случае, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания параллельна горизонтальному направлению, как на фиг. 15.
[0099] Кроме того, устройство 80 генерации плана операций выбирает второй режим V2 размещения, в случае определения невозможности захвата изделия 5 механизмом 50 зажима в четвертом режиме V4 размещения и выбирает третий режим Y3 захвата. В этом случае, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания параллельна горизонтальному направлению, как на фиг. 19.
[0100] Кроме того, как показано на фиг. 10, относительно изделия 5c, которое имеет форму треугольной призмы и верхняя поверхность 7 которого сконфигурирована двумя поверхностями 8, устройство 80 генерации плана операций выбирает первый режим V1 размещения или третий режим V3 размещения в качестве состояния механизма 50 зажима, как показано на фиг. 14, в случае, когда длина короткой стороны поверхности 8, определенной в качестве поверхности всасывания, меньше или равна максимальной ширине W2 зажима механизма 50 зажима в третьем режиме V3 размещения и выбирается первый режим Y1 захвата.
[0101] В частности, в случае, когда короткая сторона поверхности 8, выступающей в качестве поверхности всасывания, меньше или равна максимальной ширине W1 зажима механизма 50 зажима в первом режиме V1 размещения, устройство 80 генерации плана операций выбирает первый режим V1 размещения в качестве состояния механизма 50 зажима. В этом случае, как на фиг. 14, положение устройства 30 захвата в положении захвата является положением, в котором участок 41 всасывания присасывается к всасываемому участку 4 поверхности 8, определенной в качестве поверхности всасывания, и механизм 50 зажима в первом режиме V1 размещения зажимает изделие 5c в направлении, параллельном короткой стороне поверхности 8, выступающей в качестве поверхности всасывания в первом режиме Y1 захвата, и средняя линия участка 41 всасывания параллельна направлению вверх и вниз.
[0102] Устройство 80 генерации плана операций выбирает третий режим V3 размещения в качестве состояния механизма 50 зажима, в состоянии, в котором короткая сторона поверхности 8, выступающей в качестве поверхности всасывания больше максимальной ширины W1 зажима механизма 50 зажима в первом режиме V1 размещения, меньше или равна максимальной ширине W2 зажима механизма 50 зажима в третьем режиме V3 размещения, и выбирается первый режим Y1 захвата. В этом случае, как на фиг. 14, положение устройства 30 захвата в положении захвата является положением, в котором участок 41 всасывания всасывает всасываемый участок 4 поверхности 8, определенной в качестве поверхности всасывания, механизм 50 зажима в третьем режиме V3 размещения зажимает изделие 5c в направлении, параллельном короткой стороне поверхности всасывания в первом режиме Y1 захвата, и средняя линия участка 41 всасывания параллельна направлению вверх и вниз.
[0103] Устройство 80 генерации плана операций выбирает первый режим V1 размещения в качестве состояния механизма 50 зажима, в случае, когда короткая сторона поверхности 8, выступающей в качестве поверхности всасывания больше максимальной ширины W2 зажима механизма 50 зажима в третьем режиме V3 размещения, и выбирается второй режим Y2 захвата. В этом случае, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания параллельна горизонтальному направлению как на фиг. 15.
[0104] Устройство 80 генерации плана операций выбирает второй режим V2 размещения в качестве состояния механизма 50 зажима, в случае, когда короткая сторона поверхности 8, выступающей в качестве поверхности всасывания больше максимальной ширины W2 зажима механизма 50 зажима в третьем режиме V3 размещения и выбирается третий режим Y3 захвата. В этом случае, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания параллельна горизонтальному направлению как на фиг. 17.
[0105] Относительно изделия 5d, имеющего форму прямоугольной пластины, в случае, когда выбирается второй режим Y2 захвата, устройство 80 генерации плана операций выбирает первый режим V1 размещения в качестве состояния механизма 50 зажима. В этом случае, как показано на фиг. 16, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания параллельна горизонтальному направлению. Альтернативно, в случае, когда выбирается третий режим Y3 захвата, второй режим V2 размещения выбирается как состояние механизма 50 зажима. В этом случае, положение устройства 30 захвата в положении захвата является положением, в котором средняя линия участка 41 всасывания параллельна горизонтальному направлению, как показано на фиг. 17.
[0106] Далее будут описаны положения пальцев 51, 52 и 53, которые являются элементами положения захвата. Положения пальцев 51, 52 и 53 определяются на основании состояния всасываемого участка 4, режима захвата и механизма 50 зажима, выбранного как описано выше и в котором пальцы 51, 52 и 53 устойчиво поддерживают изделие 5. В настоящем варианте осуществления, поскольку пальцы 51, 52 и 53 имеют участки 54b и 54c конфигурации пальца, положения пальцев 51, 52 и 53 являются углами участка 54b конфигурации второго пальца и участка 54c конфигурации третьего пальца каждого из пальцев 51, 52 и 53.
[0107] Положение подготовки к захвату указывает позицию устройства 30 захвата и положение устройства 30 захвата во время начала операции захвата относительно изделия 5. Состояние механизма 50 зажима в положении подготовки к захвату такое же, как состояние в положении захвата. Положение пальцев 51, 52 и 53 в положении подготовки к захвату является, например, положением, в котором пальцы 51, 52 и 53 полностью открыты, как показано на фиг. 1.
[0108] В настоящем варианте осуществления, в порядке примера, положение устройства 30 захвата в положении подготовки к захвату является положением, в котором, в случае, когда поверхность всасывания изделия 5 является плоской поверхностью, средняя линия участка 41 всасывания параллельна направлению, ортогональному к поверхности всасывания, и положение, в котором, в случае, когда поверхность всасывания изделия 5 является искривленной поверхностью, и средняя линия участка 41 всасывания параллельна нормальной линии всасываемого участка 4.
[0109] В настоящем варианте осуществления, позиция устройства 30 захвата в положении подготовки к захвату является, в порядке примера, позицией, в которой средняя линия участка 41 всасывания проходит через всасываемый участок 4, и участок 41 всасывания отстоит от изделия 5 на заранее определенное расстояние.
[0110] План захвата является рабочей информацией для работы устройство 60 перемещения и устройства 30 захвата, которая необходима для перемещения устройства 30 захвата из положения подготовки к захвату в положение захвата. В частности, план захвата является информацией, например, углом поворота каждого блока 55a привода устройства 30 захвата и углом поворота различных двигателей, генерирующих движущую силу устройства 60 перемещения.
[0111] План траектории устройства 60 перемещения является информацией о работе устройства 60 перемещения для перемещения устройства 30 захвата в положении захвата и изделия 5, захватываемого устройством 30 захвата в положении захвата в пункт назначения без контакта с другим окружающим изделием или другой конструкцией. В настоящем варианте осуществления, планирование траектории является рабочей информацией, необходимой для перемещения изделия 5 в место назначения по кратчайшему пути без касания окружающих предметов. В частности, рабочей информацией является угол поворота различных двигателей устройства 60 перемещения, и пр.
[0112] Кроме того, устройство 80 генерации плана операций имеет первый режим управления и второй режим управления. Согласно изделию 5, устройство 80 генерации плана операций выбирает первый режим управления или второй режим управления.
[0113] Первый режим управления - это режим, в котором изделие 5 зажимается механизмом 50 зажима после того, как изделие 5 присасывается участком 41 всасывания. Второй режим управления - это режим, в котором изделие 5 зажимается механизмом 50 зажима и затем изделие 5 присасывается участком 41 всасывания.
[0114] Контроллер 90 выполненный с возможностью управления операцией устройства 60 перемещения. Контроллер 90 также управляет устройством 60 перемещения на основании плана траектории, сгенерированного устройством 80 генерации плана операций.
Далее операция аппарата 10 транспортировки будет описана со ссылкой на фиг. 20-28. На фиг. 20 показана блок-схема последовательности операций способа, демонстрирующая операцию аппарата 10 транспортировки. На фиг. 21 показана блок-схема последовательности операций способа, демонстрирующая основной участок операции аппарата 10 транспортировки. На фиг. 21 показана блок-схема последовательности операций способа, в частности, демонстрирующая операцию аппарата 10 транспортировки в первом режиме управления.
[0115] На фиг. 22 показан вид в перспективе, демонстрирующий операцию аппарата 10 транспортировки, захватывающего изделие 5a в первом режиме управления. На фиг. 23 показан вид в перспективе, демонстрирующий операцию аппарата 10 транспортировки, захватывающего изделие 5a в первом режиме управления. На фиг. 24 показан вид в перспективе, демонстрирующий операцию аппарата 10 транспортировки, захватывающего изделие 5a в первом режиме управления. На фиг. 25 показан вид в перспективе, демонстрирующий операцию аппарата 10 транспортировки, захватывающего изделие 5a в первом режиме управления.
[0116] На фиг. 26 показана блок-схема последовательности операций способа, демонстрирующая основной участок операции аппарата 10 транспортировки. На фиг. 26 показана блок-схема последовательности операций способа, в частности, демонстрирующая операцию аппарата 10 транспортировки во втором режиме управления. На фиг. 27 показан вид в перспективе, демонстрирующий операцию аппарата 10 транспортировки во втором режиме управления. На фиг. 28 показан вид в перспективе, демонстрирующий операцию аппарата 10 транспортировки во втором режиме управления.
[0117] Как показано на фиг. 20, устройство 20 обнаружения изделия формирует изображение внутреннее пространство контейнера 6 (этап S1). Устройство 20 обнаружения изделия передает данные фотографического изображения на устройство 70 распознавания.
Устройство 70 распознавания осуществляет обработку изображений на данных изображения, передаваемых от устройства 20 обнаружения изделия (этап S2). Устройство 70 распознавания подтверждает наличие или отсутствие изделия 5 в контейнере 6 на основании результата обработки изображений (этап S3). Когда устройство 70 распознавания определяет, что изделие 5 в контейнере 6 отсутствует (Нет на этапе S3), устройство 70 распознавания заканчивает операцию (конец).
[0118] Когда устройство 70 распознавания определяет, что изделие 5 присутствует в контейнере 6 на основании результата обработки изображений (Да на этапе S3), устройство 70 распознавания осуществляет обработку изображений данных изображения опять же функцией 1, в случае наличия множества изделий 5, изделия 5 распознаются по одному (этап S4). Другими словами, в случае наличия множества изделий 5 в контейнере 6, устройство 70 распознавания распознает множество изделий 5 по одному путем так называемого резания каждого.
[0119] После распознавания множества изделий 5 в контейнере 6 по одному, устройство 70 распознавания выбирает одно изделие 5 из множества изделий 5 функцией 2 (этап S5). В этом варианте осуществления, изделие 5, которое становится целью, подлежащее транспортировке, затем выбирается аппаратом 10 транспортировки. Этот критерий выбора состоит в том, что изделие легко перемещать из внутреннего пространства контейнера 6, как описано выше. Устройство 70 распознавания выбирает изделие 5, которое легко перемещать, на основании ситуации в контейнере 6, полученной путем обработки изображений.
[0120] Когда устройство 70 распознавания выбирает одно изделие 5 из множества изделий 5, устройство 70 распознавания осуществляет обработку изображений опять же функцией 3 и измеряет форму, положение, размер и позицию выбранного изделия 5 (этап S6).
[0121] После обнаружения формы, положения, размера и позиции выбранного изделия 5, устройство 70 распознавания отправляет измеренную информацию, то есть информацию о форме, положении, размере и позиции выбранного изделия 5 на устройство 80 генерации плана операций (этап S6).
[0122] Здесь будет описан пример операции устройства 70 распознавания на этапе S6. Случай, когда изделие 5, выбранное на этапе S5, является изделием 5a, которое имеет форму четырехугольной призмы, положение которого является положением, в котором его верхняя поверхность 7 является плоской поверхностью, и длина короткой стороны верхней поверхности 7 которого меньше или равна максимальной ширине W1 зажима механизма 50 зажима в первом режиме V1 размещения, как показано на фиг. 6, устройство 70 распознавания определяет, что форма изделия 5a, выбранного на этапе S5, является формой четырехугольной призмы.
[0123] Кроме того, устройство 70 распознавания определяет, что положение изделия 5a является положением, в котором его верхняя поверхность 7 является плоской поверхностью. Кроме того, относительно размера изделия 5a, устройство 70 распознавания определяет, что короткая сторона верхней поверхности 7 меньше или равна максимальной ширине W1 зажима механизма 50 зажима в первом режиме V1 размещения. Кроме того, устройство 70 распознавания измеряет позицию изделия 5a в контейнере 6. Устройство 70 распознавания передает информацию о форме, положении, размере и позиции изделия 5a на устройство 80 генерации плана операций.
[0124] После приема информации от устройства 70 распознавания, устройство 80 генерации плана операций выбирает первый режим Y1 захвата в качестве режима захвата на основании принятой информации, определяет всасываемый участок 4, который присасывается участком 41 всасывания в изделии 5a, генерирует положение подготовки к захвату устройства 30 захвата и состояние подготовки к захвату устройства 30 захвата, и выбирает первый режим управления или второй режим управления для изделия 5 (этап S7).
[0125] Здесь будет описан случай, когда изделие 5 является изделием 5a, которое имеет форму четырехугольной призмы, положение которого является положением, в котором верхняя поверхность 7 является плоской поверхностью, и длина короткой стороны верхней поверхности 7 которого меньше или равна максимальной ширине W1 зажима механизма 50 зажима в первом режиме V1 размещения относительно операции на этапе S7 устройства 80 генерации плана операций, как показано на фиг. 6.
[0126] Устройство 80 генерации плана операций сначала определяет верхнюю поверхность 7 в качестве поверхности всасывания, подлежащей всасыванию участком 41 всасывания. Затем устройство 80 генерации плана операций выбирает первый режим Y1 захвата в качестве режима захвата. Затем, кроме того, устройство 80 генерации плана операций определяет центр верхней поверхности 7 в качестве всасываемого участка 4, поскольку длина короткой стороны верхней поверхности 7 изделия 5a меньше или равна максимальной ширине W2 зажима механизма 50 зажима в третьем режиме V3 размещения.
[0127] Кроме того, устройство 80 генерации плана операций выбирает первый режим V1 размещения в качестве состояния механизма 50 зажима. Кроме того, устройство 80 генерации плана операций генерирует положение захвата на основании информации о позиции изделия 5a в контейнере 6 и позиции другого изделия 5 вокруг изделия 5a.
[0128] Кроме того, устройство 80 генерации плана операций генерирует положение подготовки к захвату. В частности, устройство 80 генерации плана операций оказывается в положении, в котором пальцы с первого по третий 51, 52 и 53 механизма 50 зажима в первом режиме V1 размещения максимально открыты, и средняя линия участка 41 всасывания параллельна направлению ортогональный к верхней поверхности 7. Кроме того, устройство 80 генерации плана операций определяет позицию, в которой средняя линия участка 41 всасывания проходит через всасываемый участок 4, установленный в изделии 5a, и участок 41 всасывания отстоит от изделия 5a на заранее определенное расстояние в качестве позиции устройства 30 захвата в положении подготовки к захвату.
[0129] Кроме того, в случае, когда изделие 5 имеет форму, затрудняющую перемещение, устройство 80 генерации плана операций выбирает первый режим управления, и в случае, когда изделие 5 имеет форму, которую легко перемещать, устройство 80 генерации плана операций выбирает второй режим управления. Термин "легко перемещать" означает, что изделие легко перемещать в контейнере 6. Например, изделие 5a, которое имеет столбчатую форму и положение, в котором верхняя поверхность является искривленной поверхностью, легко катить. Таким образом, термин "легко катить" означает легко перемещать. В устройстве 80 генерации плана операций заранее хранятся данные о формах, которые легко перемещать. Например, форма с искривленной нижней поверхностью легко перемещать. Столбы хранятся как формы, которые легко перемещать. Таким образом, устройство 80 генерации плана операций выбирает первый режим управления относительно изделия 5a.
[0130] Когда устройство 80 генерации плана операций генерирует положение подготовки к захвату и положение захвата изделия 5 и выбирает первый режим управления или второй режим управления, устройство 80 генерации плана операций переводит устройство 30 захвата в положение подготовки к захвату, и генерируется план траектории для установления положения подготовки к захвату из текущей позиции. Кроме того, при генерации плана траектории, устройство 80 генерации плана операций передает план траектории на контроллер 90 (этап S8).
[0131] После приема плана траектории от устройства 80 генерации плана операций, контроллер 90 предписывает устройству 60 перемещения на основании плана траектории устанавливать устройство 30 захвата в положение подготовки к захвату. В частности, устройство 60 перемещения регулирует направление, в котором обращен участок 41 всасывания. Другими словами, в случае, когда поверхность всасывания, установленная на изделии 5, является плоской поверхностью, устройство 60 перемещения предписывает устройству 30 захвата смещаться в положение, в котором средняя линия участка 41 всасывания параллельна направлению, перпендикулярному к поверхности всасывания, и устройство захвата может захватывать в выбранном режиме захвата. В случае, когда поверхность всасывания, установленная на изделии 5, является искривленной поверхностью, устройство 60 перемещения предписывает устройству 30 захвата смещаться в положение, в котором средняя линия участка 41 всасывания параллельна нормальной линии всасываемого участка 4 (этап S9).
[0132] Когда устройство 30 захвата смещается в положение подготовки к захвату, устройство 80 генерации плана операций управляет устройством 30 захвата, и контроллер 90 управляет устройством 60 перемещения таким образом, что устройство 30 захвата захватывает изделие 5 и смещает устройство 30 захвата в положение захвата (этап S10).
[0133] В данном документе, в порядке примера операции устройства 80 генерации плана операций и контроллера 90 на этапе S10, будет описан случай, когда изделие 5 является изделием 5a, которое имеет форму четырехугольной призмы, положение которого является положением, в котором верхняя поверхность 7 является плоской поверхностью, и размер короткой стороны верхней поверхности 7 которого меньше или равен максимальной ширине W1 зажима механизма 50 зажима в первом режиме V1 размещения, как показано на фиг. 6. Блок-схема последовательности операций, показанная на фиг. 21, демонстрирует конкретную последовательность операций на этапе S10.
[0134] Фиг. 22 демонстрирует состояние, в котором устройство 30 захвата находится в положении подготовки к захвату. Как показано на фиг. 21, устройство 80 генерации плана операций сначала открывает клапан 44 (этап S21). Затем устройство 80 генерации плана операций активирует генератор 45 вакуума (этап S22). Затем устройство 80 генерации плана операций сравнивает результат обнаружения датчика 46 давления с заранее заданным пороговым значением (этап S23 и этап S24).
[0135] Результат обнаружения датчика 46 давления увеличивается, когда участок 41 всасывания присасывается к изделию 5. Вышеописанное пороговое значение является значением для определения, ли присасывается участок 41 всасывания к изделию 5. Если результат обнаружения датчика 46 давления больше или равен пороговому значению, определяется, что участок 41 всасывания присасывается к изделию 5. Пороговое значение устанавливается равным значению, при котором участок 41 всасывания не отходит от изделия 5 даже когда устройство 30 захвата перемещается. Пороговое значение может быть заранее получено экспериментальным путем и т.п.
[0136] Когда устройство 80 генерации плана операций определяет, что результат обнаружения датчика 46 давления меньше порогового значения (Нет на этапе S24), контроллер 90 приводит в действие устройство 60 перемещения для приближения участка 41 всасывания к изделию 5a (этап S25). В частности, контроллер 90 управляет устройством 60 перемещения для перемещения участка 41 всасывания в сторону изделия 5a в направлении, параллельном средней линии участка 41 всасывания.
[0137] Предельное значение устанавливается для величины перемещения устройства 60 перемещения. Предельное значение является величиной дополнительного перемещения устройства 30 захвата на заранее определенное расстояние сверх измеренной позиции изделия 5. Контроллер 90 определяет, достигла ли величина перемещения устройства 60 перемещения предельного значения (этап S26). Другими словами, контроллер 90 определяет, находится ли позиция устройства 60 перемещения в предельной позиции, когда величина перемещения достигает предельного значения.
[0138] Пока устройство 60 перемещения не достигнет предельной позиции, контроллер 90 отслеживает позицию устройства 60 перемещения (Нет на этапе S23, этапе S24, этапе S25 и этапе S26). Когда контроллер 90 определяет, что результат обнаружения датчика 46 давления меньше порогового значения даже в состоянии, в котором устройство 60 перемещения перемещается в предельную позицию (Да на этапе S26), контроллер 90 сообщает об ошибке (этап S27). Для извещения об этой ошибке, это может быть любое извещение при условии, что окружающие работники могут понять. Извещением об ошибке является, например, вспышка лампы и т.п.или звуком из громкоговорителя.
[0139] Когда устройство 80 генерации плана операций определяет, что результат обнаружения датчика 46 давления больше или равен пороговому значению (Да на этапе S24), контроллер 90 останавливает устройство 60 перемещения (этап S28). Как показано на фиг. 23, это состояние является состоянием, в котором участок 41 всасывания является всасывающим всасываемым участком 4.
[0140] Когда контроллер 90 делает устройство 60 перемещения неподвижным, устройство 80 генерации плана операций подтверждает выходной сигнал датчика 56 крутящего момента каждого из первого пальца 51, второго пальца 52 и третьего пальца 53 (этап S29).
[0141] Устройство 80 генерации плана операций определяет, больше или равен ли результат обнаружения датчика 56 крутящего момента первого пальца 51 пороговому значению. В состоянии, в котором первый палец 51 давит на изделие 5a, результат обнаружения датчика 56 крутящего момента увеличивается. Упомянутое здесь пороговое значение является крутящим моментом в состоянии, в котором механизм 50 зажима зажимает изделие 5 с достаточной силой зажима. Достаточная сила зажима - это сила зажима, не позволяющая изделию 5 упасть, когда изделие 5 перемещается из контейнера 6 в место назначения. Пороговое значение может быть заранее получено экспериментальным путем. Пороговое значение может определяться в зависимости от положения захвата. Другими словами, пороговое значение в первом режиме Y1 захвата, пороговое значение во втором режиме Y2 захвата и пороговое значение в третьем режиме Y3 захвата могут отличаться друг от друга.
[0142] При определении, что результат обнаружения датчика 56 крутящего момента первого пальца 51 меньше порогового значения (Нет на этапе S30), как показано на фиг. 24, устройство 80 генерации плана операций приводит в действие блок 55a привода первого пальца 51 для зажима изделия 5a механизмом 50 зажима (этап S31).
[0143] Кроме того, устройство 80 генерации плана операций аналогично подтверждает результат обнаружения датчика 56 крутящего момента даже относительно второго пальца 52 и третьего пальца 53 (этапы S32 и S35), и сравнивает результат обнаружения датчика 56 крутящего момента с пороговым значением (этапы S33 и S36) и приводит в действие блок 55a привода (этапы S34 и S37).
[0144] Кроме того, при условии, что результаты обнаружения соответствующих датчиков 56 крутящего момента первого пальца 51, второго пальца 52 и третьего пальца 53 меньше пороговых значений (этап S38, и Нет на этапе S39), устройство 80 генерации плана операций приводит в действие соответствующие блоки 55a привода первого пальца 51, второго пальца 52 и третьего пальца 53 на основании положения захвата, сгенерированного на этапе S7 (этапы S23 - S39)
Когда устройство 80 генерации плана операций определяет, что результаты обнаружения датчиков 56 крутящего момента первого пальца 51, второго пальца 52 и третьего пальца 53 больше или равны пороговому значению (этап S38, и Да на этапе S39), устройство 80 генерации плана операций определяет, что зажим изделия 5a механизмом 50 зажима выполнен, как показано на фиг. 25.
Устройство 80 генерации плана операций определяет положение пальцев 51, 52 и 53 как положение захвата. Устройство 80 генерации плана операций приводит в действие блок 55a привода таким образом, что пальцы 51, 52 и 53 находятся в определенном положении захвата. Подтверждение обнаружения значения датчика крутящего момента на этапах S32, 35 и 38 служит для обратной связи.
[0145] Устройство 80 генерации плана операций и контроллер 90 смещают положение устройства 30 захвата при определении, что зажим изделия 5a выполнен. В случае, когда положение изделия 5a во время выполнения захвата такое же, как положение в положении захвата, положение остается неизменным. Кроме того, контроллер 90 приводит в действие устройство 60 перемещения для перемещения устройства 30 захвата в позицию в положении захвата (этап S40). На этапе S40 сначала может осуществляться либо перемещение позиции, либо смещение положения.
[0146] Как описано выше, когда операция этапа S10 выполнена, устройство 80 генерации плана операций генерирует план траектории устройства 60 перемещения для перемещения устройства 30 захвата из положения захвата в место назначения. Когда генерация плана траектории выполнена, устройство 80 генерации плана операций отправляет план траектории на контроллер 90 (этап S11).
[0147] Контроллер 90 приводит в действие устройство 60 перемещения на основании плана траектории, принятого от устройства 80 генерации плана операций, и перемещает устройство 30 захвата в место назначения (этап S12). Когда устройство 30 захвата перемещается в место назначения, устройство 80 генерации плана операций приводит в действие механизм 40 всасывания и механизм 50 зажима для освобождения изделия 5a (этап S13). Устройство 80 генерации плана операций и контроллер 90 повторяют операцию от этапа S1 к этапу S11, пока все изделия 5 в контейнере 6 не переместятся в место назначения.
[0148] Даже в случае, когда второй режим Y2 захвата или третий режим Y3 захвата выбирается в качестве режима захвата, устройство 30 захвата может захватывать изделие 5 посредством операций этапов с S1 до S39, показанных на фиг. 20 и 21. В случае, когда второй режим Y2 захвата или третий режим Y3 захвата выбирается в качестве режима захвата, на этапе S10, после завершения всасывания изделия 5 механизмом 40 всасывания, до приведения в действие механизма 50 зажима, изделие 5 может перемещаться вверх путем приведения в действие устройства 60 перемещения контроллером 90.
[0149] В случае, когда выбирается второй режим Y2 захвата, величина перемещения достаточна для обеспечения возможности перемещения второго пальца 52 и третьего пальца 53 таким образом, что второй палец 52 и третий палец 53 поддерживают нижнюю торцевую поверхность изделия 5. В случае, когда выбирается третий режим Y3 захвата, величина перемещения достаточна для обеспечения возможности перемещения первого пальца 51, второго пальца 52 и третьего пальца 53 таким образом, что первый палец 51, второй палец 52 и третий палец 53 поддерживают нижнюю торцевую поверхность изделия 5.
[0150] Далее, со ссылкой на фиг. 26-28, будет описана операция аппарата 10 транспортировки в случае, когда второй режим управления выбирается в качестве плана захвата. Устройство 80 генерации плана операций выбирает второй режим управления в качестве плана захвата относительно изделия 5b, имеющего столбчатую форму и положение, в котором его верхняя поверхность является искривленной поверхностью. Операция во втором режиме управления отличается только в операции этапа S10 на фиг. 21. Фиг. 26 демонстрирует операцию этапа S10 во втором режиме управления. Таким образом, в качестве операции аппарата 10 транспортировки в случае, когда выбирается второй режим управления, будет описан только этап S10, показанный на фиг. 26.
[0151] Когда устройство 30 захвата достигает положения подготовки к захвату, устройство 80 генерации плана операций сравнивает результат обнаружения датчика 56 крутящего момента первого пальца 51 с пороговым значением (этап S50 и этап S51). При определении, что результат обнаружения датчика 56 крутящего момента первого пальца 51 меньше порогового значения (Нет на этапе S51), устройство 80 генерации плана операций приводит в действие блок 55a привода первого пальца 51, как показано на фиг. 27, для зажима изделия 5b механизмом 50 зажима (этап S52).
[0152] Аналогично, устройство 80 генерации плана операций также сравнивает результат обнаружения датчика 56 крутящего момента с пороговым значением относительно второго пальца 52 и третьего пальца 53 (этапы S53 и S56), при определении, что результат обнаружения датчика 56 крутящего момента меньше порогового значения (Нет на этапе S54 и Нет на этапе S57), устройство 80 генерации плана операций приводит в действие блок 55a привода, как показано на фиг. 28 (этап S55 и этап S56).
[0153] Кроме того, устройство 80 генерации плана операций продолжает приводить в действие блок 55a привода первого пальца 51, блок 55a привода второго пальца 52 и блок 55a привода третьего пальца 53 (этапы S50 - S60) до определения, что результаты обнаружения датчиков 56 крутящего момента всех пальцев больше или равны пороговому значению (этап S59 и Нет на этапе S60).
[0154] Посредством операций этапов S50 - S60, устройством 30 захвата, изгибающим первый палец 51, второй палец 52 и третий палец 53, как показано на фиг. 27 и 28, механизм 50 зажима зажимает изделие 5b. Когда механизм 50 зажима зажимает изделие 5b, участок 41 всасывания обращен к изделию 5b.
[0155] Когда изделие 5b зажимается механизмом 50 зажима, устройство 80 генерации плана операций затем открывает клапан 44 и активирует генератор 45 вакуума (этапы S61 и S62). После активации генератора 45 вакуума, устройство 80 генерации плана операций сравнивает датчик 46 давления с пороговым значением (этапы S63 и S64). Устройство 80 генерации плана операций приводит в действие генератор 45 вакуума, и отслеживает результат обнаружения датчика 46 давления, пока результат обнаружения датчика 46 давления не станет большим или равным пороговому значению (Нет на этапе S64, этап S62 и этап S63). При определении, что результат обнаружения датчика 46 давления больше или равен пороговому значению (Да на этапе S64), устройство 80 генерации плана операций перемещает устройство 30 захвата в позицию в позиции захвата, и смещает в положение в позиции захвата (этап S65), и процесс переходит к этапу S11.
[0156] Как описано выше, поскольку изделие 5 может захватываться путем всасывания участком 41 всасывания и зажиматься механизмом 50 зажима, устройство 30 захвата может устойчиво удерживать изделие 5. Этот момент будет объяснен подробнее.
[0157] Первый палец 51, второй палец 52 и третий палец 53 вращаются относительно участка 31 основания и смещаются в направлении приближения друг к другу, благодаря чему, изделие 5 зажимается между, по меньшей мере, двумя пальцами. Таким образом, в случае, когда изделие зажимается путем вращения пальца, изделие принимает силу зажима от двух пальцев и принимает силу, действующую в направлении для выталкивания из двух пальцев. Предполагается случай, когда изделие 5 отсоединяется от механизма 50 зажима силой, действующей в направлении выталкивания из промежутка между двумя пальцами.
[0158] Однако, в настоящем варианте осуществления, сила всасывания участком 41 всасывания действует в направлении противоположном вышеописанному направлению выталкивания между двумя пальцами. Таким образом, поскольку изделие 5 присасывается участком 41 всасывания в состоянии, в котором изделие 5 зажимается механизмом 50 зажима, предотвращается выталкивание изделия 5 из механизма 50 зажима. Таким образом, устройство 30 захвата может устойчиво захватывать изделие 5.
[0159] Кроме того, устойчиво можно захватывать изделие 5 в первом режиме Y1 захвата, втором режиме Y2 захвата и третьем режиме Y3 захвата, в качестве режима захвата изделия 5 устройством 30 захвата, и надлежащим образом выбирать режим захвата из первого режима Y1 захвата, второго режима Y2 захвата и третьего режима Y3 захвата согласно форме, положению, размеру и позиции изделия 5.
[0160] Кроме того, относительно изделия 5b, имеющего столбчатую форму и искривленную верхняя поверхность 7, когда устройство 30 захвата в положении подготовки к захвату смещается в положение захвата, выбор второго режима управления эффективен. Этот момент будет объяснен подробнее.
[0161] Поскольку изделие 5b имеет столбчатую форму, изделие легко перемещается в контейнере 6. Таким образом, предполагается случай, когда позиция изделия 5b перемещается после того, как устройство 70 распознавания измеряет позицию изделия 5b на основании результата обнаружения устройства 20 обнаружения изделия. Альтернативно, в зависимости от точности перемещения устройства 60 перемещения, также предполагается случай, когда участок 41 всасывания перемещается в позицию, сдвинутую относительно всасываемого участка 4.
[0162] Даже в таком случае, до приведения в действие устройства 42 подачи отрицательного давления, путем зажима изделия 5b механизмом 50 зажима, изделие 5b может направляться в позицию, обращенную к участку 32 ладони, то есть, в позицию, противоположную участку 41 всасывания. Когда устройство 42 подачи отрицательного давления приводится в действие после направления изделия 5b в позицию, обращенную к участку 41 всасывания, как описано выше, участок 41 всасывания может всасывать изделие 5b. Аналогично, эффективно, что относительно изделия 5, которое легко перемещать, как в изделии 5b, изделие 5 манипулируется во втором режиме управления таким же образом.
[0163] В настоящем варианте осуществления, каждый из пальцев с первого по третий 51, 52 и 53 является подчиненной приводной системой, причем участок 54b конфигурации второго пальца и участок 54c конфигурации третьего пальца вращаются одним блоком 55a привода. Однако пальцы с первого по третий не обязательно являются подчиненной приводной системой. Могут быть обеспечены специализированный блок привода, который вращает участок 54b конфигурации второго пальца, и специализированный блок привода, который вращает участок 54c конфигурации третьего пальца, отдельный от блока привода. Короче говоря, механизм 50 зажима может быть выполнен с возможностью зажима изделия 5.
[0164] В настоящем варианте осуществления, хотя изделие 5 располагается в контейнере 6, способ размещения изделия 5 не ограничивается этим. Изделие 5 может располагаться на столе или транспортироваться транспортером. Альтернативно, изделие 5 может храниться на полке. Кроме того, изделие 5 может располагаться в куче или систематически. Альтернативно, изделие 5 может располагаться отдельно.
[0165] Кроме того, способ обработки изображений устройством 70 распознавания и критерий (условие) выбора одного изделия 5 из множества обнаруженных изделий 5 не ограничиваются конкретным способом и конкретным критерием или условием. Кроме того, устройство 20 обнаружения изделия не ограничивается 3D камерой и может конфигурироваться с использованием RGB камеры или другого оптического датчика или множества этих комбинаций. В случае конфигурации, в которой устройство 20 обнаружения изделия использует 3D камеру, можно идентифицировать группу изделий 5 и распознавать форму, позицию и положение изделия 5 посредством обработки полученных данных группы точек.
[0166] Кроме того, в настоящем варианте осуществления, хотя устройство 60 перемещения является, например, роботизированной рукой, имеющей 6 степеней свободы, настоящее изобретение не ограничивается этим. Устройство 60 перемещения может быть роботизированной рукой, имеющей 7 степеней свободы или роботизированной рукой, имеющей 5 степеней свободы или менее. Альтернативно, устройство 60 перемещения может быть скалярным роботом, платформой XYZ и т.п.
[0167] Кроме того, в настоящем варианте осуществления, хотя устройство 60 перемещения является неподвижным, устройство перемещения может перемещаться на линейной платформе, самодвижущейся кареткой и т.п.
[0168] Кроме того, в настоящем варианте осуществления, хотя каждый из пальцев 51, 52 и 53 механизма 50 зажима имеет блок 55a привода, настоящее изобретение не ограничивается этим. Множество пальцев может приводиться в действие одним блоком привода.
[0169] Кроме того, в настоящем варианте осуществления, хотя механизм 55b передачи движущей силы для приведения в действие основного тела 54 пальца движущей силой блока 55a привода является, например, подчиненной приводной системой, механизм передачи движущей силы не ограничивается этим. Кроме того, механизм 55b передачи движущей силы может быть сконфигурирован, по меньшей мере, одним из, например, проводным приводом, механизмом ремень-шкив и механизмом зубчатой передачи.
[0170] Кроме того, в настоящем варианте осуществления, хотя второе сочленение 57b каждого пальца является подчиненным ведущим валом, второе сочленение может быть ведомым валом относительно первого сочленения 57a. Кроме того, серводвигатель для приведения в действие конца оконечности пальца может быть обеспечен отдельно для произвольного управления углом и крутящим моментом второго сочленения 57b.
[0171] Кроме того, в настоящем варианте осуществления, хотя блок 55a привода является, например, серводвигателем, блок привода не ограничивается этим, и блок привода может быть электродвигателем постоянного тока или бесщеточным электродвигателем постоянного тока. Кроме того, хотя кодер также не встроен в серводвигатель, кодер может быть установлен отдельно.
[0172] Кроме того, каждый палец может состоять из искусственного мускула, изгибающегося под давлением воздуха. В этом случае, искусственный мускул становится механизмом 55b передачи движущей силы, и насос становится блоком 55a привода.
Кроме того, в настоящем варианте осуществления, хотя участок 41 всасывания выполнен с возможностью расширения и сжатия в качестве сильфонной конструкции, участок всасывания не ограничивается этим. В другом примере, участок 41 всасывания может быть отверстием, обеспеченным на поверхности 33 участка 32 ладони. Кроме того, в этом отверстии могут быть обеспечен фильтр.
[0173] Кроме того, в настоящем варианте осуществления, присасывается ли изделие 5 участком 41 всасывания, обнаруживается датчиком 46 давления. Однако, это не ограничивается использованием датчика 46 давления. В другом примере, можно использовать датчик расхода, который измеряет расход воздуха в трубе 47, или можно совместно использовать датчик 46 давления и датчик расхода.
[0174] Кроме того, в настоящем варианте осуществления, один участок 41 всасывания обеспечен, но настоящее изобретение не ограничивается этим. В другом примере, может быть обеспечено множество участков 41 всасывания. Хотя участок 41 всасывания обеспечен на участке 32 ладони, он не ограничивается этим. В другом примере, помимо участка 32 ладони, участок 41 всасывания может быть обеспечен в любой позиции каждого пальца, например, участок 54b конфигурации второго пальца и участок 54a конфигурации первого пальца.
[0175] Кроме того, в настоящем варианте осуществления, устройство 80 генерации плана операций также функционирует как устройство управления для управления приведением в действие устройства 30 захвата. Однако устройство 80 генерации плана операций не требуется для управления операцией устройства 30 захвата. Для управления операцией устройства 30 захвата можно использовать отдельное устройство управления.
[0176] Хотя в настоящем варианте осуществления первый режим Y1 захвата применяется для изделия 5, которое может захватываться в первом режиме Y1 захвата, настоящее изобретение не ограничивается этим. Например, даже в случае, когда возможен захват в первом режиме Y1 захвата, третий режим Y3 захвата может применяться для изделия 5, вес которого определен как превышающий заранее определенную величину.
[0177] Кроме того, положение изделия 5, которое располагается в контейнере 6 до захвата устройством 30 захвата, и положение изделия 5, захватываемого устройством 30 захвата в положении захвата, может отличаться друг от друга. Например, как показано на фиг. 15, после всасывания верхней поверхности изделия 5, находящегося в контейнере 6, как поверхности всасывания участком 41 всасывания, поверхность, которая присасывается участком 41 всасывания, может становиться боковой поверхностью изделия 5 за счет смещения положения устройства 30 захвата.
[0178] Хотя были описаны некоторые варианты осуществления, эти варианты осуществления были представлены исключительно в порядке примера, и не призваны ограничивать объем изобретения. Действительно, описанные здесь новый варианты осуществления могут быть реализованы в различных других формах; кроме того, различные изъятия, замены и изменения в форме описанных здесь вариантов осуществления можно производить, не выходя за рамки сущности изобретения. Нижеследующая формула изобретения и их эквиваленты призваны охватывать такие формы или модификации как подлежащие включению в объем и сущность изобретения.
Реферат
Аппарат транспортировки включает в себя: устройство обнаружения изделия, устройство захвата с участком основания и участком ладони, участком всасывания, пальцами и механизмом привода, устройство подачи отрицательного давления; устройство перемещения, устройство распознавания, которое измеряет форму, положение и размер изделия, устройство генерации плана операций, которое выбирает поверхность всасывания изделия и планирует положение захвата, и устройство управления, которое управляет операцией устройства захвата и операцией устройства перемещения для получения положения захвата, запланированного устройством генерации плана операций. В устройстве захвата аппарата транспортировки оба из первого и второго пальцев способны сближаться и удаляться друг от друга, когда второй палец находится на второй стороне. Устройство захвата содержит механизм привода, который сближает первый и второй пальцы друг с другом и удаляет их друг от друга, когда второй палец находится на второй стороне. Обеспечивается расширение возможностей аппарата транспортирования. 3 н. и 12 з.п. ф-лы, 29 ил.
Комментарии