Устройство и способ управления двигателем - RU2094354C1
Код документа: RU2094354C1
Чертежи

Описание
Изобретение относится к устройству управления двигателем, в частности для работы дверей лифта, а конкретно к полностью независимому устройству управления, которое не зависит от переключающих элементов, относящихся к движению дверей.
Современные средства управления дверями лифта выполнены по существу посредством переключателей замедления, концевых и ходовых переключателей и вспомогательного оборудования управления двигателем, установленного в непосредственной близости от устройства.
Известное устройство управления двигателем (авт. св. N 475336), содержащее средство питания двигателя, источник питания средства обработки данных, датчик импульсных сигналов, блок оперативного управления не обеспечивает требуемой надежности и точности управления двигателем, а также является сложным и дорогим.
В основу данного изобретения положена задача преодоления этих недостатков. Поставленная задача решается тем, что согласно изобретению оно снабжено пусковой программирующей кнопкой, записывающей точки отсчета, подключенной к четвертому входу средства обработки данных микропроцессорного типа, причем датчик импульсных сигналов выполнен в виде зубчатого колеса, установленного с возможностью вращения пропорционально переходному перемещению двери, зубчатая окружность которого расположена вблизи индуктивного блока на полевом транзисторе, детектирующем прохождение различных зубьев колеса мимо индуктивной связи, а средство подачи питания на двигатель выполнено из узла триаков или групп триаков, действующих с возможностью реверсирования фаз питания двигателя.
Желательно, чтобы средство обработки данных микропроцессорного типа содержало блок обработки сигналов датчика, блок обработки подсчитываемого изменения сигнала, блок обработки тока с двигателем и блок обработки сигналов управления и питания двигателей триаков, первый вход которого является первым входом средства обработки данных микропроцессорного типа, а второй, третьей и четвертой входы соединены соответственно с выходами блоков обработки тока двигателя, подсчитываемого изменения сигнала и сигналов датчиков, вход последнего является вторым входом средства обработки данных микропроцессорного типа, а второй выход блока обработки сигналов датчика подключен к входу блока обработки подсчитываемого изменения сигнала, при этом вход блока обработки двигателя является пятым входом средства обработки данных микропроцессорного типа и соединен с выходом средства подачи питания на двигатель, к входу которого подключен выход блока обработки сигналов управления и питания двигателей триаков, являющихся выходом средства обработки данных микропроцессорного типа.
Желательно, чтобы устройство содержало двойной шкив и зубчатый ремень, ориентированный в поперечном направлении двери, при этом дверь прикреплена к исполнительному зубу, который сам жестко прикреплен к ремню, а зубчатое колесо установлено на валу одного или обоих шкивов.
Поставленная задача решается тем, что в способе управления двигателем скользящей двери согласно изобретению дополнительно вдоль траектории поступательного перемещения двери с помощью полуавтоматического программирования регистрируют точки отсчета, а формирование сигналов управления на двигатель осуществляют в каждой точке отсчета.
Желательно, чтобы цифровые сигналы управления перемещением двери имели вид прямоугольных сигналов напряжения в диапазоне 0 5 Вольт.
Желательно, чтобы формирование управляющих сигналов на двигатель осуществляли путем обработки сигналов, соответствующих четырем заданным точкам отсчета по ходу перемещения к закрыванию двери.
На фиг. 1 изображен частичный вид спереди системы для привода двери лифта, на котором показан датчик импульсного сигнала устройства управления двигателем в соответствии с изобретением; на фиг. 2 схематически электронная схема устройства управления двигателем в соответствии с изобретением; на фиг. 3 схема различных рабочих шагов, производимых в данном устройстве.
Как показано на фиг. 1, устройство управления двигателем по изобретению включает в себя использование датчика 1 с вращательным движением, установленного на приводном валу рабочей двери 2 системы. Эта приводная система состоит из конструкции, содержащей зубчатый ремень 3, установленный на двух шкивах 5, расположенных по существу на концах переходного движения двери, а соответствующий приводной двигатель включает приводной шкив.
Дверь приводится в движение во время перехода по направляющим 7 посредством включающего кронштейна 9, прикрепленного жестко к ремню. Датчик состоит из конструкции металлического зубчатого колеса 11 и индуктивного блока 13 с полевым транзистором, который расположен на небольшом расстоянии от зубчатой окружности колеса. Это зубчатое колесо установлено на валу параллельно приводному шкиву 5. Зубья являются регулярными, так что каждый импульс, выдаваемый индуктивным блоком по мере прохождения каждого зуба во время вращения, соответствует переходному движению двери на заданной длине. Путем подсчета импульсов на приращении или уменьшении в зависимости от направления движения можно определить переходное движение двери от точки отсчета и ее точное положение, известное в любой момент времени.
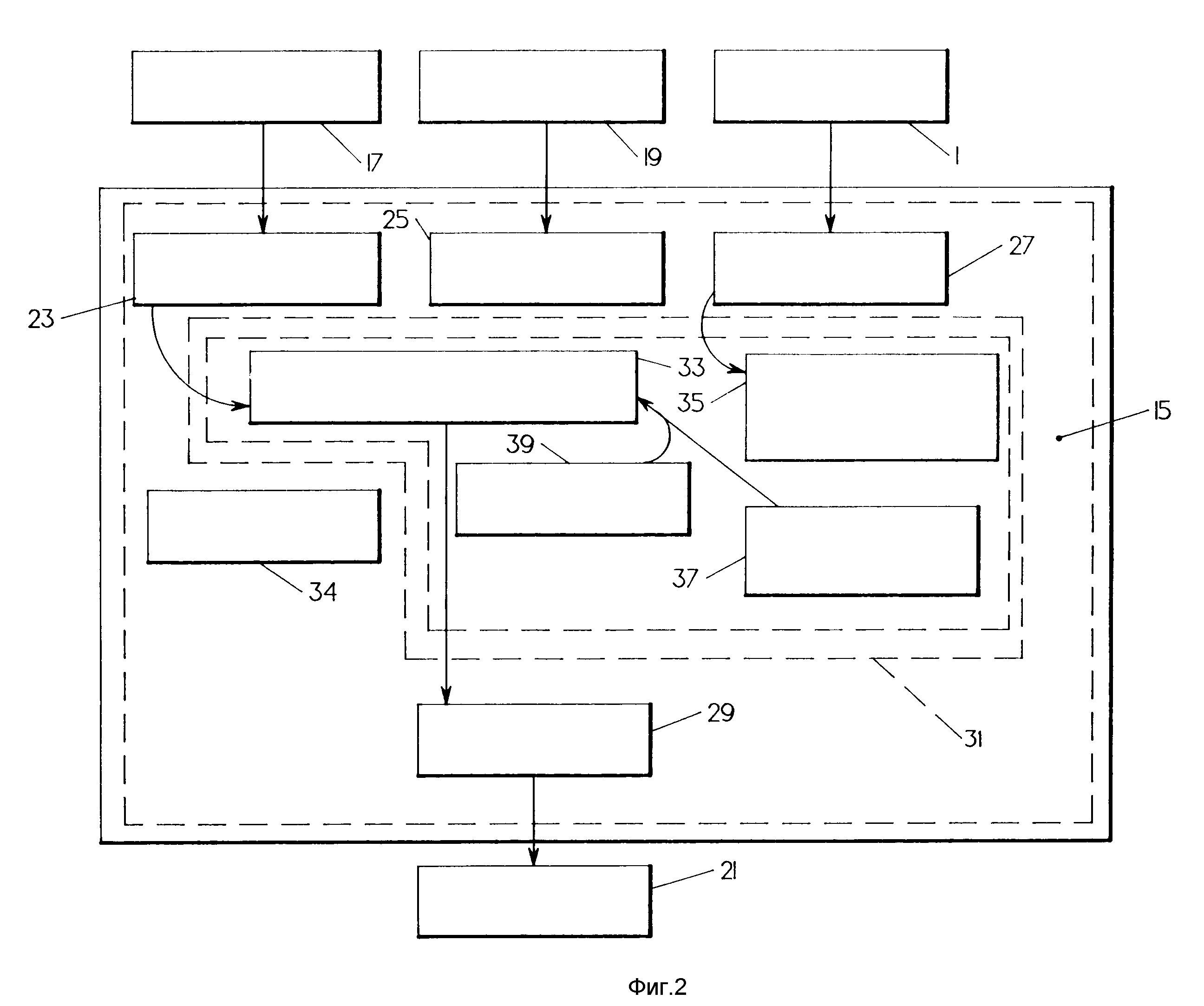
На фиг. 2 показана электронная схема устройства управления в соответствии с изобретением. Это показано с помощью функциональных групп или функциональных блоков (в рамках) существенных составляющих. Все эти элементы собраны статически на обычной печатной плате 15. Различные соотношения элементов друг с другом показаны с помощью стрелок. Функциональные наружные или периферийные элементы состоят соответственно из блока 17 оперативного управления, образованного управляющей платой открывания-закрывания кабины, блока 19 источника энергии, образованного из однофазной линии напряжением 220 В, индуктивного датчика 1 с зубчатым колесом типа показанного на фиг. 1, и двигателя 21, приводящего в движение дверь.
Поскольку специфические компоненты схемы связаны с выполнением так называемых "твердых" функций, то у нас имеется последовательно интерфейсный блок 23 оперативного управления, связанный с блоком управления 17, адаптированный блок питания 25, специфический для этих схем, связанный с линиями и образованный, например, из трансформатора, интерфейсного блока 27 для считывания сигналов датчика и блока 29 питания двигателя. Управляющий интерфейс 17 выполнен многовольтным, работающим без регулировки, причем входные сигналы изменяются от 18 до 220 В постоянного или переменного тока. На выходе он выдает непрерывную последовательность прямоугольных или нулевых сигналов 5 В. Трансформатор, который не показан, блока 25 существенно снижает напряжение линии до меньшей величины, совместимой с величиной для элементов схемы. Считывающий интерфейс датчика 27 выдает цифровой сигнал в форме логики 0 или 1. Блок 29 питания двигателя состоит из узла специальных триаков, действующих соответственно на направление вращения двигателя, момент его вращения в функции переходного движения двери и торможения двигателя, переключенного в режим генератора. Триаки направления связаны с обычным фазосдвигающим конденсатором, создающим из однофазного тока линии - вращающиеся индуктивные поля, необходимые для работы двигателя. Реверсирование направления получают за счет реверсирования фазы двигателя. Триаки момента действуют на напряжение питания двигателя. Триаки торможения заставляют двигатель работать с генератором с самоторможением за счет создаваемого тока.
Указанные функциональные периферийные блоки соединены с главным блоком обработки 31, выполняющим более конкретно так называемые "мягкие" функции. Это окружено рамкой из прерывистой линии в центральном положении на чертеже. Этот блок состоит из микропроцессора, приспособленного или запрограммированного для осуществления различных необходимых функций типа обработки триаков управления 33 и питания двигателя, управления сигналами от датчика 35, связанного с функцией для обработки выделения счета этих сигналов 37 и, наконец, обработки тока двигателя 39. Все эти функции взаимонезависимы и о них будет сказано далее. Во первых, находим управление 33 обработки функции, которое действует на логическую и физическую инициализацию устройства, запускающего триаки в функции информации, полученной от других функций. Прежде всего функция 35 для управления сигналами от датчика обеспечивает подсчет импульсных сигналов, идущих от датчика, и выдает информацию о приращении или убывании, соответствующую направлению перехода двери. Этот подсчет импульсов осуществляется от выбранного отсчета (первоначального положения) и позволяет определить положение движущейся части (двери) в любой момент времени. Эта функция связана непосредственно с функцией 37 для обработки выделения счетчика, которое действует так, что этапы движения происходят в порядке, запрограммированном в функции хода (изменения момента торможения и сниженного момента, о котором будет сказано далее), и позволяет производить правильный ход этапов движения отслеживаемых во времени. И, наконец, функция 39 для тока двигателя или обработки безопасности, работающая путем выделения максимального токового порога, позволяет детектировать любое заедание двери и действует на функцию обработки питания 33 так, что дверь приводится в движение в противоположном направлении. Необходимо отметить, что для осуществления этих функций микропроцессор программируется полуавтоматически с помощью кнопки 34, установленной на пульте, которая при нажатии позволяет записать различные точки отсчета хода двери, а именно первоначальную или пусковую точку, которая выбирается для завершения открывания, входную точку максимального момента (вторая опорная точка), точку торможения (третья точка) и точку конца хода двери (четвертая точка).
Работа устройства в связи с перемещением двери представлена ниже в связи с алгоритмом (фиг. 3), который включает последовательность шагов, помеченных позициями 40-79. Прохождение по различным этапам показано стрелками.
Алгоритм начинается с шага 40 в общем состоянии прерывания напряжения 40 питания, где не может осуществляться работа. Цикл начинается с шага 43 запит кой устройства напряжением от линии. Предполагая, что дверь открыта и так оставлена на шаге 45 инициализация цикла приводит к автоматическому возврату к шагу 47 в состояние покоя, когда дверь остается в этом положении. Предположим, что на этом этапе пользователь хочет использовать лифт. Этот пользователь должен тогда послать приказ на включение управления работой на шаге 49. Это приводит автоматически к шагу 51 для обнуления счетчика и логической перенастройки движущейся части, т.е. для возврата к открыванию и одновременному обнулению счетчика.
Из этого исходного положения двери может начинаться ее перемещение. На шаге 53 закрывание происходит сначала при пониженном моменте. В дополнение импульсы датчика считывают и через микропроцессор наращивают содержимое счетчика. Привод с пониженным моментом происходит до тех пор, пока не будет достигнута вторая опорная точка ранее определенного хода (на коротком расстоянии от исходной точки). В этой точке шага 55 привод происходит с максимальным моментом, а поэтому с максимальной скоростью. Поддерживается считывание импульсов, которое позволяет знать точное положение двери все время, которая в случае неправильной работы, зажатия или поломки, выявленных по отслеживанию пропадания импульсов, может вернуть дверь в ее положение покоя путем реверсирования перемещения на ту же пройденную длину. При прохождении с максимальным моментом сила тока двигателя отслеживается по отношению к данному порогу, чтобы обнаружить любую ситуацию заедания двери. Это отслеживание обеспечивается функцией обработки тока двигателя, Перемещение происходит с максимальным моментом, а значит с наивысшей скоростью на большей части перемещения. При достижении положения вблизи закрывания (третья опорная точка) на шаге 57 двигатель переключается в режим генератора (самоторможение), что тормозит дверь до нулевой скорости, когда она с учетом инерции практически закрыта, а затем двигатель включается с пониженным моментом на шаге 59 для завершения закрывания, как это требуется, и дверь удерживается в этом положении на шаге 61. Если при пониженном моменте наблюдается остановка перед концом хода (например, зажаты пальцы), дверь автоматически открывается. Затем дверь удерживается закрытой при управлении точным положением для получения закрывания, соответствующим четвертой и последней опорной точке перемещения двери.
Таким образом пониженный момент при закрывании предотвращает любые вибрации двери с большой амплитудой при движении кабины.
Затем необходимо отметить, что все активные фазы этого цикла закрывания отказываются на шаге 63, зависящем от проверки управления открывания двери с помощью обычной кнопки внутри кабины и импульсного мониторинга, как уже отмечалось, который позволяет обнаружить любую поломку, и, наконец, от мониторинга за током двигателя, который управляет перемещением направления относительно физического и логического положения двери. Это может привести в зависимость от случая к предварительному торможению двери и возможно в соответствии с серьезностью к дефектному останову на шаге 64 и в этом случае для инициализации нового цикла потребуется выключение питания, а затем снова включение питания.
Цикл открывания двери происходит симметрично циклу закрывания.
Когда кабина прибывает на указанный пользователем этаж, управление закрыванием отключается на шаге 65, что приводит к запуску цикла открывания двери. Он начинается при пониженном моменте на шаге 57. Считывание импульсов поддерживается, хотя при этом содержимое счетчика уменьшается. В третьей опорной точке на шаге 69 происходит работа двигателя с максимальным моментом. Необходимо отметить в связи с этим, что все переключения триаков происходят в нулевых точках полуволн, и, таким образом устраняется возникновение паразитных электрических наводок. Во время этого хода двери с наивысшей скоростью импульсы отслеживаются на шаге 71, как и в соответствующем периоде закрывания. Во второй опорной точке, вблизи полного открывания, двигатель самотормозится на шаге 73 в том же порядке, как и при подходе к закрыванию, а затем открывание происходит при пониженном моменте на шаге 75 до полного открывания в течение некоторого времени в соответствии с шагом 77 с мониторингом изменения содержимого счетчика. В период с пониженным моментом в конце открывания обнаружение неизменности содержимого счетчика вызывает немедленный переход к ситуации покоя, как уже отмечалось.
Точка полного открывания (исходная точка) достигается обычным путем. И, наконец, момент погашается, что соответствует состоянию покоя на шаге 79, от которой начнется новый цикл закрывания. Необходимо отметить, что во время цикла открывания период прохождения при максимальном моменте (третья опорная точка) до исходной точки зависит от мониторинга импульсов и от правильного прохождения шагов во времени, что ведет в случае неправильной работы к непосредственному переходу к инициализации или к состоянию покоя.
Предшествующее показывает выгодные характеристики устройства управления двигателем по изобретению, относящиеся к его надежности, отсутствию переключающих контактов, простоте исполнения и соединения (небольшие размеры), низкую стоимость (использование недорогих частей, легко устанавливаемых при полуавтоматическом программировании с помощью кнопки точек отсчета хода), безопасность движения, которое может управляться практически по всему ходу и независимо от тока двигателя, торможение двери без вспомогательных приспособлений, автоматическое поддержание пониженного момента, создающее ударопоглощающий стык в конце цикла, и возможность применения всех типов двигателей с соответствующей адаптацией питания компонентов.
Реферат
Назначение: изобретение относится к устройствам управления. Сущность изобретения: устройство содержит средство подачи питания на двигатель, датчик импульсных сигналов, соединенный с формирователем импульсов (интерфейс), блок оперативного управления, соединенный с интерфейсом для приема управляющих сигналов, выход которого и выход формирователя импульсов подключены соответственно и первому и второму входу средства обработки данных микропроцессорного типа, к третьему входу которого подключен его источник питания. Выход средства обработки данных подключен к входу блока питания двигателя. Дополнительно устройство снабжено пусковой программирующей кнопкой, записывающей точки отсчета, подключенной к четвертому входу средства обработки данных микропроцессорного типа. Причем датчик импульсных сигналов выполнен в виде зубчатого колеса, установленного с возможностью вращения пропорционально переходному перемещению двери, зубчатая окружность которого расположена вблизи индуктивного блока на полевом транзисторе, детектирующем прохождение различных зубьев колеса мимо индуктивной связи. Средство подачи питания на двигатель выполнено из узла триаков или групп триаков, действующих с возможностью реверсирования фаз питания двигателя. 2 с. и 8 з. п. ф-лы, 3 ил.

Комментарии