Способ и система определения точки контакта для сцепления - RU2554185C2
Код документа: RU2554185C2
Чертежи

Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к транспортным средствам с автоматически управляемым сцеплением, в частности к способу и системе определения точки контакта для сцепления согласно ограничительной части пункта 1 формулы изобретения. Изобретение также относится к системе согласно пункту 14 и транспортному средству согласно пункту 15 формулы изобретения.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В основном в транспортных средствах возникают различные конфигурации силовой передачи, например коробка передач может приобретать вид вручную управляемой коробки передач или автоматической коробки передач. В случае тяжелых транспортных средств часто их необходимо приводить в движение максимально комфортным образом для водителя, что обычно подразумевает переключение передач в коробке передач, осуществляемые автоматически посредством системы управления транспортным средством. В связи с этим коробки передач, которые переключают передачи автоматически, также становятся все более применяемыми в тяжелых транспортных средствах.
Это автоматическое переключение передач часто осуществляется в тяжелых транспортных средствах системой управления с управлением переключениями передач в "ручных" коробках передач (так называемые AMT, автоматизированная механическая трансмиссия), частично по причине того, что они являются по существу менее дорогостоящими в изготовлении, но и вследствие их большей эффективности.
Эффективность автоматических коробок передач, относящихся к типу, часто обеспечиваемому в автомобилях, пока слишком низкая, чтобы быть оправданной, кроме случаев использования в, например, городских автобусах и развозных транспортных средствах, которые часто подъезжают к остановке и далее уезжают снова.
В связи с этим "ручные" коробки передач, которые переключают передачу автоматически, используются в тяжелых транспортных средствах в большей степени на автомагистралях/магистралях национального значения.
Это переключение передач может быть осуществлено различными путями, один из которых включает использование автоматически управляемого сцепления для повышения/понижения передачи, в случае чего водителю необходим доступ только к педали газа и педали тормоза.
В принципе, сцепление необходимо использовать только для приведения транспортного средства в движение из неподвижного положения благодаря тому, что другие переключения передач могут быть осуществлены системой управления транспортным средством вообще без использования сцепления, так как они при этом осуществляются "без создания крутящего момента". Также возможно использовать автоматически управляемое сцепление только для некоторых ступеней передачи или только при повышении или понижении передачи.
Тем не менее, из-за удобства автоматически управляемое сцепление во многих случаях используется во всех или по существу всех повышениях и или понижениях передачи. На транспортных средствах с автоматическими сцеплениями важно знать точку контакта сцепления (положение сцепления), т.е. положение, в котором сцепление начинает передавать крутящий момент.
Знание точки контакта, когда, например, транспортное средство начинает трогаться, подъезжает к остановке и переключает передачу, таким образом обеспечивает его систему управления знанием положения сцепления, в котором передача крутящего момента от двигателя к остальной силовой передаче начинается или кончается. Это значит, что приведение транспортного средства в движение и переключение передачи могут быть осуществлены таким образом, чтобы не вызывать недопустимых рывков или недопустимого износа в силовой передаче.
Однако точка контакта не имеет фиксированного положения, но может изменяться, например, из-за износа сцепления. Также она может изменяться, когда транспортное средство находится в движении, а это значит, что даже если она определена в начале движения, нет уверенности, что действующая точка контакта позже в движении будет соответствовать точке контакта, определенной в начале.
Таким образом, может быть необходимо осуществлять определение точки контакта во время движения. Возможности для выполнения этого без беспокойства водителя транспортного средства могут быть более или менее доступны в зависимости от среды, в которой транспортное средство перемещается.
Проблема с определением точки контакта заключается в том, что занимаемое этим время может быть слишком длинным, чтобы быть незамеченным, когда транспортное средство находится в движении.
Если транспортное средство, например, перемещается в городском транспортном движении с множественными троганиями и остановками, могут иметься хорошие возможности для выполнения определения точки контакта, например, при остановке на красном свете. Однако в случае транспортного средства, главным образом используемого на магистралях национального значения, количество таких возможностей может быть значительно больше ограничено. Причина состоит в том, что коробке передач необходимо находиться в нейтральном положении, чтобы осуществлять возможную адаптацию точки контакта. Когда транспортное средство перемещается на магистралях национального значения, могут иметься очень длинные периоды между какими-либо переключениями передач, особенно в низменностях. В связи с этим адаптация точки контакта является проблематичной в ситуациях, которые не включают переключения передач.
Таким образом, имеется необходимость в улучшенном способе определения точки контакта, когда транспортное средство находится в движении.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является предложение способа определения точки контакта для транспортного средства, который делает возможным это определение во время возможного движения без беспокойства водителя транспортного средства. Эта задача решается способом согласно пункту 1 формулы изобретения.
Настоящее изобретение относится к способу определения точки контакта для сцепления транспортного средства, в котором указанное сцепление предназначено для передачи мощности привода между первым источником привода в виде двигателя, например двигателя внутреннего сгорания, и по меньшей мере одним ведущим колесом, указанное определение точки контакта включает размыкание указанного сцепления, и способ дополнительно содержит этапы, на которых
во время определения точки контакта, когда транспортное средство находится в движении,
регулируют скорость вращения указанного первого источника привода по направлению к первой скорости, которая превосходит скорость холостого хода указанного первого источника привода.
Это дает преимущество в том, что точка контакта сцепления, т.е. положение сцепления, в котором между двигателем и коробкой передач возникает контакт, может быть определена в больших количествах случаев, чем было возможно ранее, без недопустимого беспокойства водителя транспортного средства. Это является возможным посредством такого управления двигателем, что во время определения точки контакта двигатель лишается возможности замедляться до скорости холостого хода, но может, например, регулироваться как в случае, если силовая передача до сих пор замкнута. Таким образом, источник привода может регулироваться так, что определение точки контакта может происходить по существу незаметным для водителя транспортного средства образом.
Таким образом, определение точки контакта может начинаться в ситуации, когда силовая передача замкнута, т.е. сцепление замкнуто, и передача зацеплена в коробке передач, при этом транспортное средство перемещается с указанным первым источником привода, двигаясь на скорости, которая превосходит скорость холостого хода, приводя к по существу большим возможностям для выполнения определения точки контакта, пока транспортное средство находится в движении. Например, транспортные средства для перевозок на большое расстояние могут в принципе перемещаться весь день без остановки, а это значит, что точка контакта может явно изменяться во время движения в отсутствие возможностей исправления точки контакта без беспокойства водителя, пока транспортное средство находится в движении. В связи с этим такие проблемы решаются согласно настоящему изобретению.
Дополнительные отличия настоящего изобретения и его преимущества представлены подробным описанием вариантов выполнения ниже и приложенными чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1a изображает силовую передачу транспортного средства, в котором настоящее изобретение может быть использовано.
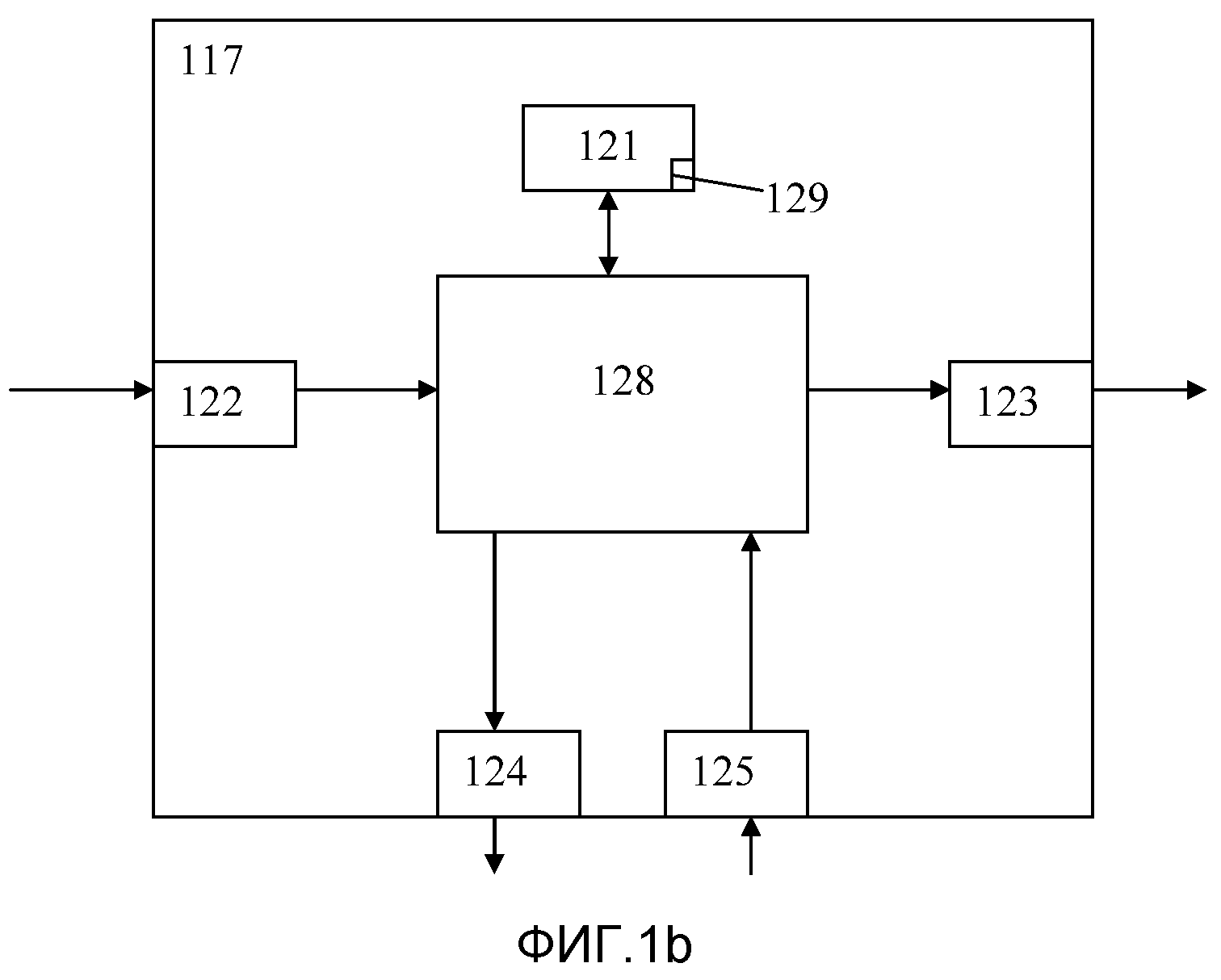
Фиг. 1b изображает блок управления в системе управления транспортного средства.
Фиг. 2 изображает способ согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Фиг. 1a изображает силовую передачу транспортного средства 100 согласно варианту выполнения настоящего изобретения. Транспортное средство 100, схематически изображенное на Фиг. 1, имеет только один мост, обеспеченный ведущими колесами 113, 114, но изобретение также применимо в транспортных средствах, в которых более чем один мост обеспечен ведущими колесами. Силовая передача содержит первый источник привода в виде двигателя внутреннего сгорания 101, который традиционным образом с помощью выходного вала двигателя, обычно с помощью маховика 102, соединен с коробкой передач 103 посредством сцепления 106.
Сцепление 106 принимает вид автоматически управляемого сцепления и в этом варианте выполнения принадлежит к дисковому типу, посредством чего элемент (диск) 110 трения, соединенный с первым элементом коробки передач, например входным валом 109 коробки передач 103, селективно зацепляется с маховиком 102 для передачи мощности привода от двигателя 101 ведущим колесам 113, 114 с помощью коробки передач 103. Зацепление диска 110 сцепления с маховиком 102 двигателя регулируется посредством пластины 111 давления, которая является подвижной в боковом направлении, например, посредством рукоятки 112, функция которой заключается в управлении приводом 115 сцепления.
Само воздействие привода 115 сцепления на рукоятку 112 регулируется системой управления транспортным средством. В современных транспортных средствах системы управления обычно содержат систему шин связи, состоящую из одной или более шин связей, для соединения вместе нескольких электронных блоков управления (ECUs) или контроллеров и различных компонентов, расположенных на транспортном средстве. Такая система управления может содержать большое количество блоков управления, при этом ответственность за выполнение специальной функции может быть разделена между двумя или более блоками управления. Для простоты. Фиг.1а показывает только блоки 116, 117, 118 управления, но специалистом в области техники будет принято во внимание, что транспортные средства, относящиеся к типу, здесь представленному, часто имеют значительно больше блоков управления.
Блок 116 управления управляет сцеплением 106 (привод 115 сцепления) и в изображенном варианте выполнения настоящее изобретение осуществлено в блоке 117 управления. Блок 117 управления может быть блоком управления, специально разработанным для настоящего изобретения, но настоящее изобретение также может быть осуществлено полностью или частично в одном или более других уже существующих блоках управления транспортного средства 100, например блоке 116 управления и/или блоке 118 управления, которые/ый здесь управляют/ет двигателем 101 транспортного средства, и/или блоке управления (не показан), который здесь управляет коробкой передач 103.
Управление, осуществляемое блоком 116 управления над приводом 115 сцепления, также может зависеть не только от блока 117 управления, но и от, например, информации, принятой, например, от блока управления (не показан), который ответственен за функцию коробки передач 103, и информации от одного или более блоков управления, которые управляют функциями двигателя, а именно в настоящих примерных блоках управления 118.
Блоки управления, относящиеся к указанному здесь типу, обычно выполнены с возможностью приема сигналов датчиков от различных частей транспортного средства 100, например блок 116 управления может принимать сигналы датчиков, представляющих положение диска сцепления и/или рукоятки. Блок 117 управления может, например, принимать сигналы от блока 116 управления, а также от, например, блока 118 управления двигателя и блока управления коробки передач (последний не показан). Блоки управления, относящиеся к указанному здесь типу, также обычно выполнены с возможностью подачи сигналов управления различным частям и компонентам транспортного средства. В представленном примере блок 117 управления подает сигналы, например, в блок 116 управления, чтобы запрашивать/задавать управление скоростью двигателя, как представлено ниже.
Управление часто определяется программными инструкциями, обычно в виде компьютерной программы, которая при выполнении в компьютере или блоке управления заставляет компьютер/блок управления осуществлять требуемые действия управления, например этапы способа согласно настоящему изобретению. Компьютерная программа обычно принимает вид программного продукта 129, который хранится на цифровом носителе 121 данных (смотри Фиг.1b), например ROM (постоянное запоминающее устройство), PROM (программируемое постоянное запоминающее устройство), EPROM (стираемое PROM), флэш-память, EEPROM (электрически стираемое PROM), блок жесткого диска и подобное, в или соединенном с блоком управления, и который выполняется блоком управления. В связи с этим поведение транспортного средства в специальной ситуации может модифицироваться посредством изменений инструкций компьютерной программы.
Пример блока управления (блока 117 управления) изображен схематически на Фиг.1b, при этом возможно он содержит блок 128 вычисления, который может принимать вид по существу любого пригодного типа процессора или микрокомпьютера, например схемы для обработки цифровых сигналов (цифровой сигнальный процессор DSP) или схемы с заданной специальной функцией (специализированная к применению интегральная микросхема ASIC). Блок 128 вычисления соединен с блоком 121 памяти, который обеспечивает его, например, записанным программным кодом 129 и/или записанными данными, которые блок 128 вычисления требует для выполнения вычислений. Блок 128 вычисления также выполнен с возможностью хранить в блоке 121 памяти частичные или конечные результаты вычисления.
Блок 117 управления дополнительно обеспечен соответственными устройствами 122, 123, 124, 125 для приема и отправки входных и выходных сигналов. Эти входные и выходные сигналы могут содержать колебательные сигналы, импульсы или другие атрибуты, которые устройства 122, 125 приема входных сигналов могут обнаруживать в качестве информации и которые могут быть преобразованы в сигналы, которые блок 128 вычисления может обработать. В связи с этим эти сигналы передаются в блок 128 вычисления. Устройства 123, 124 отправки выходных сигналов выполнены с возможностью преобразовывать сигналы, например, посредством их модулирования, принятые от блока 128 вычисления для того, чтобы создавать выходные сигналы, которые могут быть отправлены в другие части и/или компонент/компоненты системы управления транспортным средством, для которых эти сигналы предназначены. Каждое из соединений с соответственными устройствами для приема и отправки входных и выходных сигналов может принимать вид одного или более из кабеля, шины данных, например шины CAN (сеть контроллера), шины MOST (передачи данных мультимедийных систем) или некоторой другой конфигурации шины, или беспроводного соединения.
На Фиг. 1a транспортное средство 100 дополнительно содержит приводные валы 104, 105, которые соединены с их ведущими колесами 113, 114 и приводятся в движение выходным валом 107 коробки передач 103 с помощью шестеренной передачи 108 моста, например традиционной дифференциальной. Когда переключение передачи осуществляется на транспортном средстве 100, изображенном на Фиг. 1a, сцепление 106 размыкается приводом 115 сцепления, который регулируется блоком управления, другая передача зацепляется в коробке передач и далее сцепление замыкается. Как отмечено выше, при таких переключениях передач важно, чтобы система управления транспортным средством имела надежные данные о точке контакта сцепления, т.е. физического положения, в котором диск сцепления приходит в контакт с маховиком, и в связи с этим может начинать передавать крутящий момент между двигателем и остальной частью силовой передачи.
Знание положения точки контакта и характеристики сцепления 106, которые могут изменяться от сцепления к сцеплению и которые подобно точке контакта необходимо оценивать на равных интервалах (здесь не будет дополнительно описана такая оценка характеристики сцепления), и вытекающее знание крутящего момента, который сцепление может передавать в различных положениях, делают возможным осуществление переключения передач таким образом, который является не только комфортным для водителя, например, тем, что они могут происходить без недопустимых рывков, но и экономным образом, который уменьшает излишний износ силовой передачи. Процесс переключения передачи также может быть ускорен тем, что в течение него сцеплению не обязательно размыкаться больше, чем необходимо для освобождения диска сцепления от маховика, в отличие от использования полного потенциального перемещения рукоятки.
Точка контакта в настоящем описании и формуле изобретения, изложенной ниже, означает не только физическое положение, в котором диск сцепления находится, когда только появился физический контакт с маховиком (или с некоторым другим элементом, соединенным с выходным валом двигателя), т.е. точку, в которой сцепление начинает передавать крутящий момент, но и любое представление такого положения, таким образом точка контакта может, например, быть положением рукоятки и/или привода сцепления тогда, когда диск сцепления только создает контакт с маховиком.
Определение точки контакта обычно выполняют для нахождения точного положения, в котором сцепление 106 начинает передавать крутящий момент. Однако точка контакта не является фиксированной точкой, но может изменяться, например, из-за износа сцепления с течением времени. Несмотря на то, что износ сцепления может быть рассмотрен как несущественный в короткий период времени, точка контакта может изменяться, пока транспортное средство находится в движении, а это значит, что даже если она определена в начале движения, нет уверенности, что действующая точка контакта позже в движении будет соответствовать точке контакта, определенной в начале. Например, положение точки контакта может быть высоко температурно-зависимым и изменяться с изменениями температуры сцепления во время движения.
Таким образом, имеется необходимость в определении точки контакта, пока транспортное средство 100 находится в движении. Возможности для выполнения этого без беспокойства водителя могут быть более или менее доступны в зависимости от среды, в которой транспортное средство перемещается.
Настоящее изобретение предлагает способ увеличения возможностей выполнения определения точки контакта (адаптации точки контакта) без беспокойства водителя транспортного средства.
Способ 200 согласно настоящему изобретению проиллюстрирован на Фиг. 2. Способ согласно изобретению начинается на этапе 201 с выяснения, должно ли быть выполнено определение точки контакта. В ином случае способ остается на этапе 201, но если определение точки контакта подлежит выполнению, способ переходит на этап 202. Переход от этапа 201 на этап 202 может быть осуществлен различными путями. Например, время, которое прошло с прошлого выполнения, может быть использовано для определения необходимости определения точки контакта. Согласно другому примеру эта необходимость определяется согласно способу, описанному в параллельной заявке на патент Швеции SE 1150217-6 под названием "Method and system for determination of a need for contact point adaptation", которая имеет тех же заявителя, автора и дату подачи, что и настоящая заявка и основывает необходимость определения точки контакта на температуре сцепления 106. Способ, описанный в этой заявке, содержит этапы, на которых определяют первую температуру сцепления и сравнивают ее со второй температурой, определенной ранее. Необходимость определения точки контакта признается, когда первая температура отличается от второй более чем на первое значение.
Необходимость определения точки контакта и в результате перехода от этапа 201 на этап 202 на Фиг. 2 может, разумеется, также быть определена другими пригодными путями.
Способ дополнительно содержит определение на этапе 202, является ли уместным определение точки контакта, т.е. является ли текущее поведение движения транспортного средства таким, что определение точки контакта является уместным. Способ может оставаться на этапе 202, пока он не определит, что путь, по которому движется транспортное средство, делает его подходящим для выполнения определения точки контакта. Например, определение точки контакта не должно выполняться, когда транспортное средство находится на крутом подъеме, в ситуации, в которой размыкание сцепления должно в максимальной степени избегаться, чтобы не потерять приводную мощность транспортного средства.
Условие на этапе 202 может быть определено различными путями. Это условие может, например, значить, что крутящий момент, сообщаемый силовой передаче от двигателя транспортного средства, может иметь значение не больше значения первого крутящего момента, например, некоторой величины, выраженной в ньютонах на метр, или некоторого процентного содержания от максимального крутящего момента, обеспечиваемого двигателем. Альтернативно, это условие может значить, что ускорение/замедление, которому транспортное средство будет подвержено при размыкании сцепления, не отличается от действующего ускорения/замедления на значение, большее заданного значения, которое может, например, зависеть от текущей скорости транспортного средства, нагруженности и подобного. Выше приведенные значения могут, например, быть установлены так, что ускорение/замедление является недостаточно малым, чтобы быть особо ощутимым для водителя транспортного средства или для его/ее беспокойства.
Если торможение транспортного средства может быть выполнено посредством второго источника привода, например служебного тормоза, дополнительного тормоза или электродвигателя, расположенного после коробки передач, или если транспортное средство может приводиться в движение посредством электродвигателя, расположенного после коробки передач, согласно варианту выполнения возможно заменять крутящий момент, сообщаемый от источника привода, расположенного перед сцеплением, во время определения точки контакта, на крутящий момент источника привода, расположенного после коробки передач, при условии, что он имеет достаточную производительность.
Если, например, двигатель внутреннего сгорания замедляет движение, т.е. сообщает силовой передаче тормозной крутящий момент, альтернативно этот крутящий момент может быть сообщен, например, вторым источником привода, расположенным после коробки передач. Это делает возможным в такой ситуации полное отсоединение двигателя внутреннего сгорания без влияния на скорость транспортного средства совсем. В этом случае сперва может быть определено, достаточно ли второго источника привода, т.е. может ли он быть рассчитан на подачу достаточного крутящего момента, способного заменять крутящий момент двигателя. Альтернативно, второй источник привода или совокупность источников привода, расположенных после коробки передач, могут заменять такую большую долю крутящего момента первого источника привода, что вышеупомянутое условие ускорения/замедления выполняется.
Второй источник привода может, например, регулироваться блоком управления, который управляет двигателем 101 внутреннего сгорания. Альтернативно, этот второй источник привода может быть автономным и автоматически принимать на себя сообщение крутящего момента, например, посредством функции высшего порядка, такой как функция замедлителя, который обеспечивает постоянное снижение скорости за счет скорости транспортного средства, требуемой, например, функцией управления на крейсерском режиме.
Когда определение точки контакта является уместным, способ переходит на этап 203 для определения, находится ли транспортное средство 100 в движении и замкнуто ли сцепление 106.
Один вариант выполнения определяет лишь, находится ли транспортное средство в движении, так как оно уже может находиться в ситуации движения, в которой передача мощности между двигателем 101 и коробкой передач 103 отсутствует. Примеры содержат ситуации высокой скорости транспортного средства, в которых силовая передача отсоединяется вместо замедления двигателя при высокой скорости двигателя. В некоторых случаях это может быть эффективно из энергетических соображений. В таких случаях определение точки контакта таким образом выполняется в ситуации, в которой сцепление 106 уже свободно от крутящего момента, и управление двигателем не требуется.
Если транспортное средство 100 находится в движении, способ переходит на этап 204 для выполнения определения точки контакта, например, любыми путями, описанными ниже. Если транспортное средство не находится в движении, а неподвижно, определение точки контакта в большей степени возможно без беспокойства водителя и может, например, быть выполнено любыми способами, описанными ниже.
Однако, если транспортное средство 100 находится в движении с замкнутой силовой передачей, способ переходит на этап 205 для управления двигателем во время определения точки контакта согласно настоящему изобретению. Таким образом настоящее изобретение применяется при определении точки контакта, когда транспортное средство находится в движении, начиная с того момента, когда силовая передача замыкается, т.е. когда сцепление замкнуто и передача зацеплена в коробке передач.
Так как определение точки контакта согласно настоящему изобретению выполняется, когда транспортное средство 100 находится в движении, оно должно быть предпочтительно, как указано выше, выполнено в ситуации, в которой состояние движения транспортного средства является подходящим. Возможные примеры этого содержат ситуации, в которых двигатель приводит в движение или тормозит транспортное средство с низким крутящим моментом.
На этапе 205 определяют действительную скорость двигателя, и способ переходит на этап 206, где сцепление 106 размыкают, но если это случается, когда транспортное средство находится в движении с замкнутой трансмиссией, двигатель будет замедляться до скорости холостого хода, причем водитель может заметить это по необъяснимому и беспокойному поведению транспортного средства. Согласно настоящему изобретению в связи с этим скорость двигателя регулируют таким образом, что водителю не требуется знать о размыкании сцепления совсем.
Для отсоединения передачи в коробке передач как при переключении передачи двигатель 101 первым регулируют до нулевого крутящего момента в трансмиссии (так называемое понижение) так, что крутящий момент не передается через коробку передач 103. Далее начинают размыкание сцепления 106, при этом обычно двигатель начинает замедляться по направлению к скорости холостого хода, кроме случаев активного регулирования по направлению к некоторой другой скорости. Согласно настоящему изобретению регулирование скорости двигателя согласно изобретению предпочтительно начинается, как только обнаружится, что сцепление начало размыкаться.
Оно следует за непрерывным регулированием скорости двигателя по направлению к скорости, определенной на этапе 205, например скорости, которая бы действовала, если бы передача была зацеплена.
В результате управление двигателем 101 таким образом делает возможным размыкание сцепления 106, будучи незамеченным водителем транспортного средства, так как двигатель может быть оставлен на скорости, которую он имел, когда началось размыкание сцепления. Когда сцепление разомкнуто, коробка передач может входить в нейтральное положение для предотвращения влияния на транспортное средство при определении точки контакта. Некоторые типы определения точки контакта также требуют, чтобы коробка передач входила в нейтральное положение. Одновременно с регулированием скорости двигателя по направлению к скорости, определенной на этапе 205, т.е. скорости, которую бы он имел, если бы силовая передача была замкнута с зацепленной передачей, возможна адаптация точки контакта на этапе 207, которая может быть выполнена любым пригодным образом.
Таким образом, настоящее изобретение предоставляет преимущество в том, что управление двигателем 101 выполняется таким образом, что определение точки контакта может происходить незаметным или по существу незаметным для водителя образом, когда транспортное средство находится в движении с замкнутой силовой передачей. Таким образом, он/она не подвергается ненужному беспокойству.
Во время размыкания сцепления 106 скорость вращения может таким образом регулироваться по направлению к скорости, действующей непосредственно перед размыканием сцепления. Один вариант выполнения вместо этого определяет скорость для указанного двигателя 101, которая представляет собой предполагаемую скорость двигателя при замыкании сцепления после указанного определения точки контакта, после чего скорость указанного двигателя во время определения точки контакта регулируется по направлению к указанной определенной скорости. Это изменение скорости может, например, зависеть от возможности транспортного средства помнить ускорение или замедление в то время, когда имело место определение точки контакта. Это определение скорости может, например, также принимать форму изменения скорости за счет переключения передачи, т.е. скорость двигателя может быть имитирована, как будто имеет место переключение передачи.
Альтернативно, предполагаемое изменение скорости может быть определено на основе данных, касающихся ожидаемого впереди пути следования транспортного средства 100, которые могут, например, быть получены с помощью так называемой функции упреждения, или, например, навигационных данных, в случае чего скорость двигателя 101 во время определения точки контакта может регулироваться так, что она изменяется согласно предполагаемому изменению скорости.
Предполагаемое изменение скорости, которое двигатель 101 будет испытывать, если определение точки контакта не выполнено, также может быть оценено для каждого момента времени при определении точки контакта, например, как указано выше, в случае чего скорость двигателя во время определения точки контакта может регулироваться так, что она изменяется согласно указанному предполагаемому изменению скорости.
Способ согласно настоящему изобретению также может быть применен, когда активирована функция управления на крейсерском режиме для автоматического поддержания скорости транспортного средства. В этом случае система управления транспортным средством может находить больше моментов времени, которые подходят для выполнения определения точки контакта, так как она может в большей степени определять и вычислять скорость, которую транспортное средство будет иметь в дальнейшем. И в этом случае любые доступные данные, касающиеся ожидаемого впереди пути следования транспортного средства, могут быть приняты во внимание. В случаях, когда транспортное средство имеет функцию управления на крейсерском режиме, дающую возможность поддерживать постоянное расстояние от впереди идущего транспортного средства, определение точки контакта может, например, также быть выполнено при обнаружении, что транспортное средство собирается обгонять более медленное транспортное средство, в случае чего определение точки контакта может быть выполнено во время уменьшения скорости до скорости впереди идущего транспортного средства.
Определение точки контакта на этапе 207 может быть выполнено любым пригодным образом. В известном уровне техники это обычно выполняется, когда входной вал коробки передач тормозится перемещением сцепления 106 из разомкнутого положения в замкнутое положение, делая возможным определение положения, в котором входной вал начинает ускоряться. Например, точка контакта определяется как положение, в котором датчик скорости вращения на входном валу коробки передач регистрирует скорость транспортного средства.
Однако время, требуемое для адаптации согласно этому способу, может быть слишком длительным, чтобы быть незаметным, когда транспортное средство находится в движении. Это отчасти происходит из-за того, что во многих случаях длительное время затрачивается на то, чтобы входной вал коробки передач останавливался после вхождения коробки передач в нейтральное положение, особенно если коробка передач нагревается (что обычно значит, что имеется небольшое трение). В некоторых транспортных средствах этот процесс может быть ускорен, как правило, имеющимся промежуточным валом, обычно соединенным с указанным входным валом, по возможности обеспеченным тормозом. Однако многим транспортным средствам недостает этой возможности.
Также может быть трудно в зависимости от типа датчика скорости корректно обнаруживать низкие скорости вращения входного вала и в результате действующей точки контакта. Вместо этого устанавливается точка (положение), которое сцепление 106 занимает, когда входной вал достигает скорости, обнаруживаемой датчиком.
Адаптация точки контакта также может, например, быть выполнена согласно решению, описанному в заявке на патент Швеции SE 0950663-5, который делает возможным выполнение адаптации точки контакта в более короткое время и в результате в больших случаях, пока транспортное средство находится в движении, например, во время переключения передач и во время торможения на остановке.
SE 0950663-5 использует тот факт, что крутящий момент Mclutch, передаваемый сцеплением, может быть оценен как Mclutch-J+MFriction, где J - момент инерции первого элемента коробки передач (который может быть известен или исключен из вычислений, которые описаны в указанной заявке на патент). Вычисление Mclutch включает оценку углового ускорения и MFriction (момент трения, который воздействует на входной вал коробки передач (первый элемент коробки передач)).
Входной вал коробки передач с коробкой передач, входящей в нейтраль, ускоряется до требуемой скорости, например, посредством выходного вала двигателя, с помощью сцепления 106, затем следует оценка коэффициента трения для характерного трения первого элемента коробки передач (например, входного вала коробки передач, включающего диск сцепления, или входного вала коробки передач и промежуточного вала).
Далее из разомкнутого положения сцепление 106 замыкается, в результате чего крутящий момент, передаваемый им, как указано выше, представляет собой функцию оцениваемого момента трения, и при замыкании сцепления крутящий момент, передаваемый им, определяется для множества его положений. Точку контакта определяют как положение сцепления, в котором крутящий момент, передаваемый им, превосходит первое значение, например нуль, т.е. Mclutch>0.
Согласно настоящему изобретению первый элемент коробки передач может принимать форму любого набора компонентов, которые могут быть приведены во вращение посредством сцепления и отсоединены и от двигателя транспортного средства, и от его ведущих колес, как указано выше, т.е. участка силовой передачи, который может быть отсоединен и от двигателя 101, и от ведущих колес 113, 114. Таким образом, момент трения, оцененный, как указано выше, представляет собой момент трения для совокупности компонентов.
Альтернативно, определение точки контакта, разумеется, может быть выполнено некоторыми другими пригодными путями.
Когда на этапе 207 определение точки контакта выполнено, далее зацепляют целесообразную передачу (например, передачу, на которой находилось транспортное средство во время размыкания сцепления, или передачу, которую переключение передачи воспроизводило, как указано выше), при этом крутящий момент от двигателя снова сообщают силовой передаче при одновременном замыкании сцепления, этап 208. Далее способ завершается на этапе 209 или возвращается на этап 201 для определения, изменилась ли снова точка контакта сцепления таким образом, чтобы требовать другую адаптацию точки контакта.
Дополнительные варианты выполнения устройства согласно изобретению представлены в приложенной формуле изобретения. Следует также отметить, что устройство может быть преобразовано согласно различным вариантам выполнения способа согласно изобретению (и наоборот), и что настоящее изобретение никоим образом не ограничено вариантами выполнения, описанными выше, способа или устройства согласно изобретению, но относится к и содержит все варианты выполнения в пределах объема охраны приложенных независимых пунктов формулы изобретения.
Реферат
Изобретение относится к транспортным средствам с автоматически управляемым сцеплением. Способ определения точки контакта для сцепления транспортного средства, в котором сцепление передает мощность между двигателем и ведущим колесом, при этом определение точки контакта включает размыкание сцепления и когда транспортное средство находится в движении, определяют точку контакта. Дополнительно регулируют скорость двигателя по направлению к первой скорости, которая выше скорости холостого хода двигателя, и после определения точки контакта зацепляют передачу, на которой находилось транспортное средство во время размыкания сцепления. Система для реализации способа содержит средства размыкания сцепления во время определения точки контакта и средства управления скоростью. Система также содержит средство зацепления передачи после определения точки контакта, на которой находилось транспортное средство во время размыкания сцепления. Достигается возможность определения точки контакта во время движения. 3 н. и 11 з.п. ф-лы, 3 ил.
Формула
регулируют скорость указанного первого источника привода (101) по направлению к первой скорости (ω1), которая выше скорости холостого хода указанного первого источника привода (101), и
после определения точки контакта зацепляют передачу, на которой находилось транспортное средство (100) во время размыкания сцепления (106).
когда указанное транспортное средство (100) двигается на первой скорости двигателя (ω1), которая выше скорости холостого хода указанного транспортного средства (100), регулируют скорость двигателя по направлению к указанной первой скорости (ω1) во время указанного определения точки контакта.
определяют для указанного первого источника привода (101) предполагаемое изменение скорости, которое является по существу изменением скорости, которое первый источник привода (101) будет проявлять, если определение точки контакта не было выполнено, после чего во время определения точки контакта указанный первый источник привода регулируют так, что скорость изменяется согласно указанному предполагаемому изменению скорости.
определяют для указанного первого источника привода (101) на основании данных, касающихся ожидаемого впереди пути следования транспортного средства (100), предполагаемое изменение скорости, в результате чего во время указанного определения точки контакта указанный первый источник привода (101) регулируют так, что скорость изменяется согласно указанному предполагаемому изменению скорости.
в первый момент времени определяют первую температуру указанного сцепления (106),
сравнивают указанную определенную первую температуру указанного сцепления (106) со второй температурой, определенной во второй момент времени, который предшествует первому моменту времени, и применяют указанный способ, когда указанная первая температура отличается от указанной второй температуры более чем на первое значение.
Комментарии