Способ и система ограничения величины энергии, рассеиваемой фрикционным сцеплением транспортного средства - RU2675294C2
Код документа: RU2675294C2
Чертежи






Описание
Область техники, к которой относится изобретение
Изобретение относится к дорожным транспортным средствам и, в частности, к способу ограничения величины энергии, рассеиваемой фрикционным сцеплением, которое соединяет и передает движение от двигателя на коробку передач при включенном сцеплении.
Уровень техники
Известно, что при выключении фрикционного сцепления может возникать разность скоростей двигателя и ведущего вала коробки передач, которая устраняется при полном включении сцепления. Синхронизация скоростей двигателя и ведущего вала коробки передач при включенной передаче в коробке передач приводит к выделению энергии, рассеиваемой сцеплением в виде тепла.
В частности, проблема возникает в случае, если водитель запрашивает высокий крутящий момент от двигателя при включенном сцеплении. Высокий крутящий момент обычно приводит к скачкам оборотов двигателя при частично включенном сцеплении, вызванных тем, что достаточно сложно выполнить точную синхронизацию перемещений педали газа и педали сцепления. Скачки оборотов в двигателе возникают в ситуациях, когда скорость вращения двигателя быстро возрастает из-за высокого выходного крутящего момента и отсутствия значительной нагрузки для компенсации ускорения двигателя, при выключении или частичном включении сцепления.
Выделение тепла внутри фрикционного сцепления становится все более серьезной проблемой из-за того, что максимальный крутящий момент сцепления снижают для удовлетворения современных требований к компоновке.
Во время понижения передачи частной проблемой является выделение тепла из-за того, что скорость вращения двигателя во время переключения передачи должна возрастать для того, чтобы ее можно было синхронизировать со скоростью ведущего вала коробки передач в конце этапа понижения передачи. Если скорость изменения скорости вращения двигателя слишком высока в конце этапа включения сцепления, то водитель может почувствовать вибрации в трансмиссии и колебание величины ускорения.
Предпочтительной, в частности, во время понижения передачи является ситуация, когда скорость вращения двигателя немного превышает скорость вала коробки передач в конце этапа включения сцепления, поскольку это создает ощущение быстрой реакции на действия водителя и делает ускорение более комфортным.
Раскрытие изобретения
Целью изобретения является создание способа ограничения величины энергии, рассеиваемой включенной фрикционным сцеплением.
Предложен способ ограничения величины энергии, рассеиваемой фрикционным сцеплением дорожного транспортного средства, которое соединяет и передает движение от двигателя на коробку передач, когда сцепление включено, а коробка передач находится в положение передачи, в котором определяют целевую скорость вращения двигателя и регулируют двигатель на основании его целевой скорости вращения, причем целевая скорость вращения двигателя представляет собой целевую скорость скольжения сцепления, зависящую от сочетания текущей скорости ведущего вала коробки передач и скорости в переходной области на основании состояния сцепления.
Скорость в переходной области могут регулировать в виде функции зависимости от состояния сцепления, переключаясь между максимальным значением при выключенном сцеплении и минимальным значением при полностью включенном сцеплении.
Двигателем могут управлять таким образом, чтобы текущая скорость вращения двигателя соответствовала целевой скорости вращения двигателя.
Дополнительно определяют значение скорости вращения двигателя для трогания дорожного транспортного средства с места, причем целевая скорость вращения двигателя представляет собой максимальное значение из целевой скорости вращения двигателя при трогании с места и целевой скорости скольжения сцепления.
Целевая скорость вращения двигателя при трогании с места может представлять собой минимальную расчетную скорость вращения двигателя, позволяющую транспортному средству тронуться с места при низком уровне рассеивания энергии сцеплением.
Кроме того целевая скорость вращения двигателя при трогании с места быть выбрана из диапазона скоростей вращения двигателя, которые позволяют выполнить запуск транспортного средства при низком уровне рассеивания энергии сцеплением.
Состояние сцепления может быть определено на основании положения педали сцепления.
Также предложена система ограничения величины энергии, рассеиваемой фрикционным сцеплением дорожного транспортного средства, которое соединяет и передает движение от двигателя на коробку передач, когда сцепление включено, а коробка передач находится в положение передачи, которая включает в себя электронный контроллер для регулировки работы двигателя и контроллер скольжения сцепления для определения целевой скорости вращения двигателя, используемой при регулировке двигателя на основании целевой скорости вращения двигателя, причем целевая скорость вращения двигателя представляет собой целевую скорость скольжения сцепления, зависящую от сочетания текущей скорости вращения ведущего вала коробки передач и скорости в переходной области на основании состояния сцепления.
Электронный контроллер регулирует скорость вращения двигателя таким образом, чтобы она соответствовала целевой скорости скольжения сцепления.
Коробка передач имеет ведущий вал, приводимый в движение с помощью сцепления, причем педаль сцепления предназначена для управления сцеплением, датчик положения педали сцепления предназначен для определения состояния сцепления, а целевая скорость скольжения сцепления зависит от сочетания текущей скорости ведущего вала коробки передач и скорости в переходной области на основании положения педали сцепления.
Скорость в переходной области может изменяться между максимальным значением при выключенном сцеплении и минимальным значением при полностью включенном сцеплении.
Система дополнительно может содержать контроллер трогания с места для определения целевой скорости вращения двигателя для трогания транспортного средства с места, причем целевая скорость вращения двигателя может представлять собой максимальное значение из целевой скорости вращения двигателя при трогании с места и целевой скорости скольжения сцепления, а двигатель управляется электронным контроллером на основании целевой скорости вращения двигателя.
Целевая скорость вращения двигателя при трогании с места, определенная с помощью контроллера трогания с места, может представлять собой минимальную расчетную скорость вращения двигателя, позволяющую транспортному средству тронуться с места при низком уровне рассеивания энергии сцеплением.
Кроме того целевая скорость вращения двигателя при трогании с места, определенная с помощью контроллера трогания с места, может иметь любое значение из диапазона расчетных скоростей вращения двигателя, позволяющих транспортному средству тронуться с места при низком уровне рассеивания энергии сцеплением.
Также предложено дорожное транспортное средство, содержащее систему ограничения величины энергии, рассеиваемой фрикционным сцеплением, в соответствии с вышеуказанной системой.
Краткое описание чертежей
Настоящее изобретение будет описано на примере со ссылкой на сопроводительные чертежи, на которых:
на фиг. 1а показан схематический вид дорожного транспортного средства в соответствии с изобретением, содержащего систему ограничения величины энергии, рассеиваемой фрикционным сцеплением;
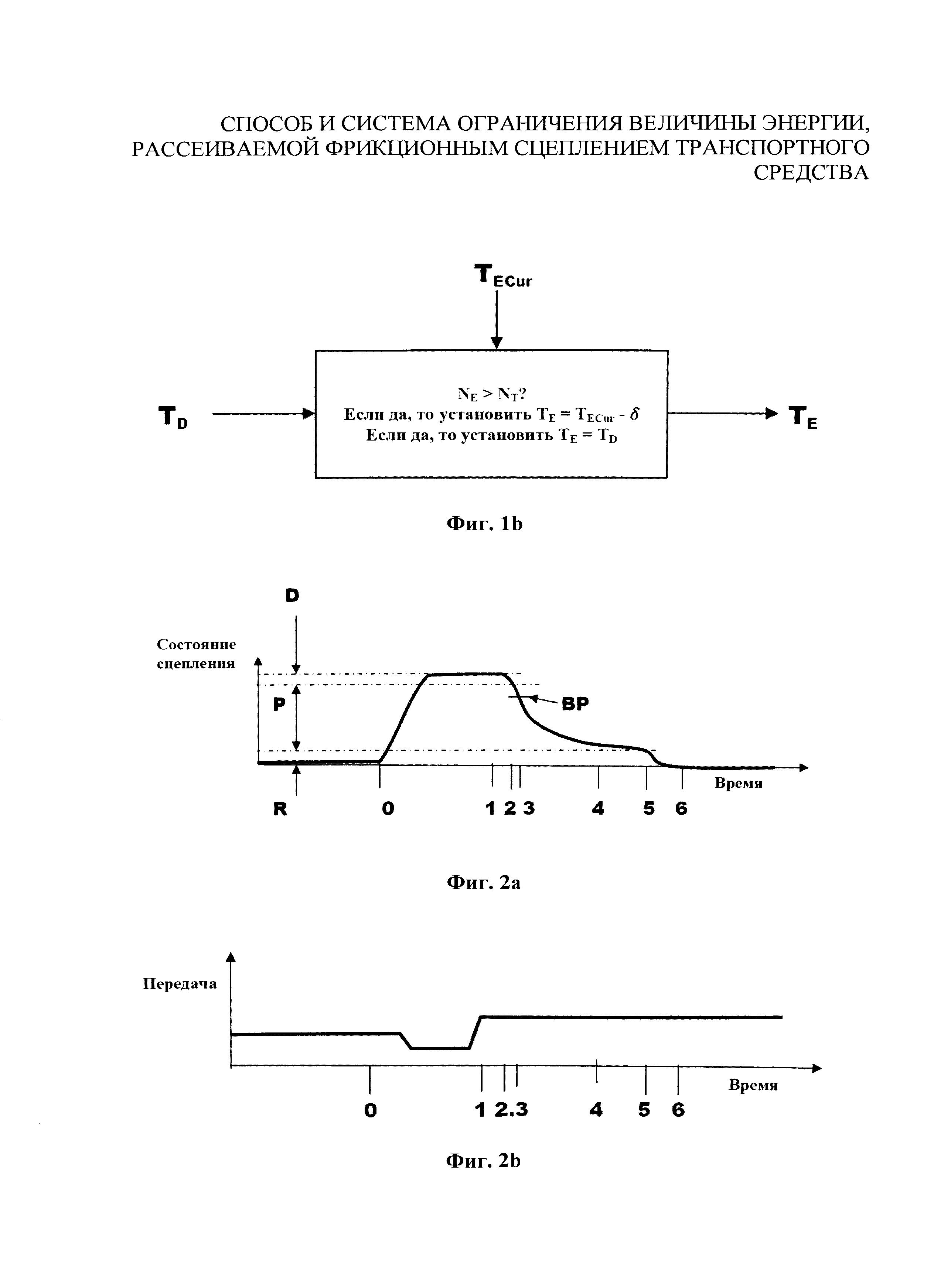
на фиг. 1b показан схематический вид контроллера крутящего момента, являющегося частью системы по фиг. 1а;
на фиг. 2а представлен график изменения состояния сцепления во время понижения передачи;
на фиг. 2b представлен график изменения состояния передачи во время понижения передачи, использующий временную ось по фиг. 2а;
на фиг. 2с показан график изменения нерегулируемой скорости вращения двигателя, скорости ведущего вала коробки передач и целевой скорости вращения двигателя при понижении передачи, использующий временную ось по фиг. 2а;
на фиг. 3а показан график изменения состояния передачи во время трогания транспортного средства с места;
на фиг. 3b показан график изменения состояния сцепления во время трогания транспортного средства с места, использующий временную ось по фиг. 3а;
на фиг. 3с показан график изменения нерегулируемой скорости вращения двигателя, скорости ведущего вала коробки передач, целевой скорости скольжения сцепления и целевой скорости вращения двигателя, достаточной для трогания транспортного средства с места, использующий временную ось по фиг. 3а;
на фиг. 4 показан график изменения нерегулируемой скорости вращения двигателя, скорости ведущего вала коробки передач и целевой скорости вращения двигателя при повышении передачи, использующий временную ось по фиг. 2а;
на фиг. 5 представлен схематичный вид различных положений педали сцепления и итоговых состояний сцепления;
на фиг. 6 показана высокоуровневая блок-схема первого способа ограничения величины энергии, рассеиваемой фрикционным сцеплением, в соответствии с изобретением;
на фиг. 7 показана высокоуровневая блок-схема второго способа ограничения величины энергии, рассеиваемой фрикционным сцеплением, в соответствии с изобретением;
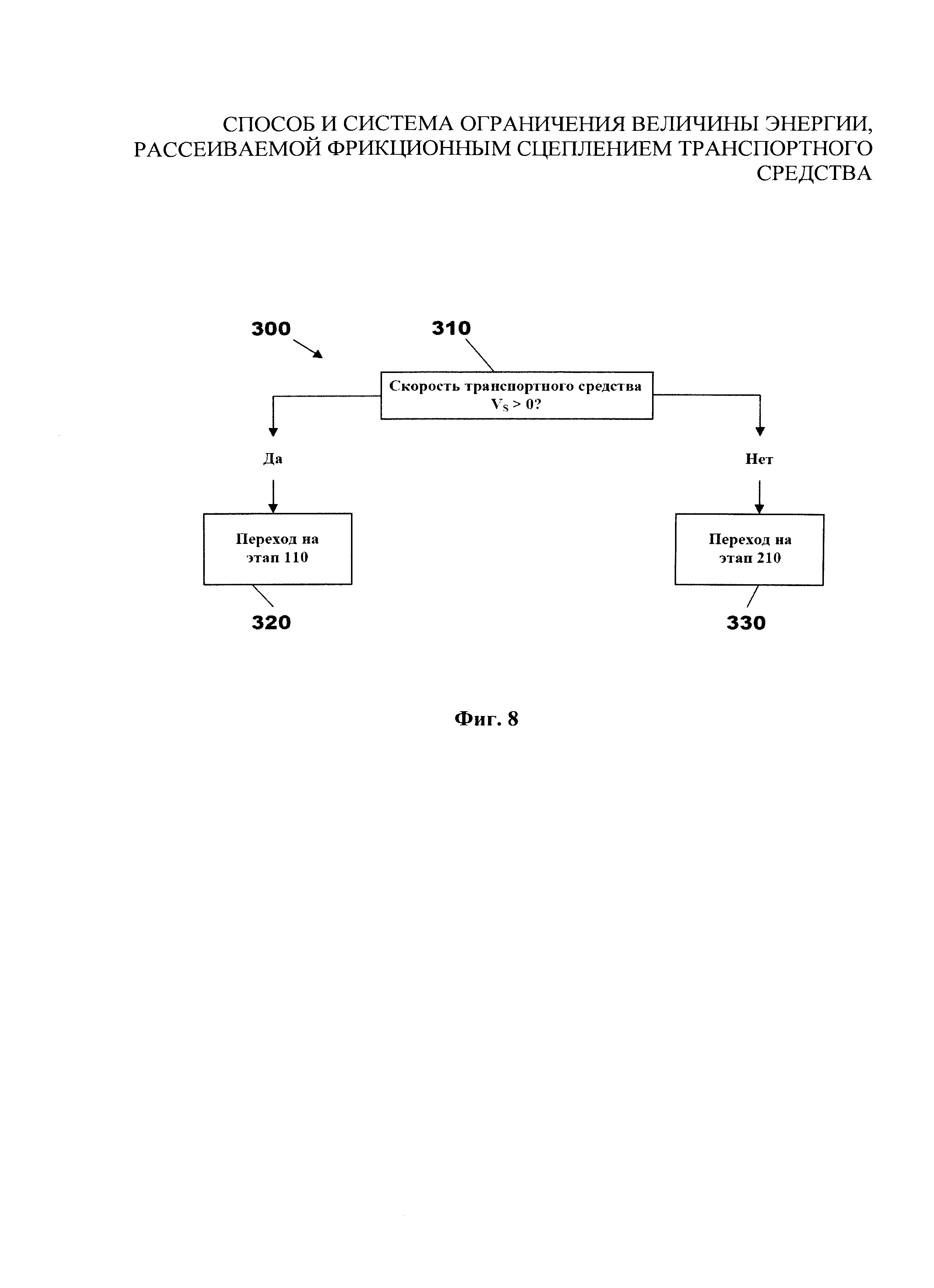
на фиг. 8 показан способ объединения первого и второго способов по фиг. 6 и 7.
Осуществление изобретения
На фиг. 1 представлено дорожное транспортное средство 5 с четырьмя дорожными колесами 6 и двигателем 10, приводящим в движение ручную коробку передач 12 с помощью фрикционного сцепления 13. Как известно, сцепление 13 управляется с помощью педали сцепления (не показана) через исполнительный механизм (не показан) любого известного типа. Ведущий вал сцепления 13 вращается со скоростью NE, эквивалентной скорости вращения двигателя 10, а ведомый вал сцепления 13 вращается со скоростью NI, эквивалентной скорости вращения ведущего вала ручной коробки передач 12. Когда коробка передач 12 полностью включена, сцепление 13 практически не проскальзывает, поэтому скорости ведущего и ведомого валов сцепления будут одинаковыми, а скорость вращения двигателя будет равна скорости ведущего вала коробки передач 12 (NE=NI).
В данном случае коробка 12 передач приводит в движение передние колеса 6 транспортного средства 5 через трансмиссию 16, однако настоящее изобретение также может быть использовано для транспортных средств с полным и с задним приводом.
Электронный контроллер 20 предназначен для управления работой двигателя 10, используя значения нескольких входных устройств 14, 15, 17, 18, 19.
Первое входное устройство представляет собой датчик 14 скорости вращения двигателя, который генерирует сигнал для электронного контроллера 20, соответствующий значению скорости вращения двигателя (NE).
Второе входное устройство представляет собой датчик 15 включенной передачи (SGS), который генерирует входной сигнал для электронного контроллера 20, соответствующий значению, по крайней мере, текущей включенной передачи, а в некоторых случаях ожидаемой передачи.
Третье входное устройство представляет собой датчик 17 положения педали сцепления, который генерирует входной сигнал, соответствующий значению текущего положения педали сцепления (CP). Положение педали сцепления используют в данном случае для прогнозирования состояния сцепления 13, однако могут быть использованы другие способы прогнозирования состояния сцепления, например, датчик перемещения подшипника выключения сцепления или датчик давления системы при использовании сцепления 13 с гидравлическим управлением. Предпочтительный способ заключается в использовании датчика 17 положения педали сцепления, так как он имеет невысокую стоимость и потому что такие датчики обычно уже установлены в транспортном средстве для выполнения других функций управления.
Четвертое входное устройство представляет собой датчик 18 скорости движения по дороге, который в данном случае представляет собой стандартный датчик, используемый антиблокировочной тормозной системой, однако он может быть датчиком для измерения скорости вращения трансмиссии на участке после коробки 12 передач.
Пятое входное устройство представляет собой датчик 19 положения педали газа, который генерирует входное значение крутящего момента TD, запрашиваемого водителем транспортного средства 5.
В данном примере скорость NI вращения ведущего вала коробки 12 передач может быть спрогнозирована на основании выбранного передаточного отношения и скорости движения по дороге, однако в других вариантах реализации может быть использован отдельный датчик скорости вращения.
При работе в нормальном режиме электронный контроллер 20 будет управлять двигателем 10 в зависимости от крутящего момента, запрашиваемого водителем и определяемого датчиком 19 положения педали газа. В данном случае двигатель 10 представляет собой дизельный двигатель, в котором для увеличения крутящего момента изменяют количество топлива, подаваемого системой 11 впрыска топлива, а моменты впрыска топлива в двигатель изменяют в соответствии с запрашиваемым крутящим моментом. При использовании двигателя с искровым зажиганием для изменения выходного крутящего момента двигателя могут быть использованы различные способы, известные из уровня техники.
Электронный контроллер 20 содержит контроллер скольжения сцепления 25 (CSC), предназначенный для ограничения величины энергии, рассеиваемой включенным сцеплением 13.
Электронный контроллер 20 выполнен с возможностью регулировки запрашиваемого крутящего момента двигателя 10 при включенном сцеплении 13 таким образом, чтобы снизить вероятность скачков оборотов в двигателе и, следовательно, ограничить величину энергии, рассеиваемой сцеплением 13. По варианту реализации электронный контроллер 20 содержит контроллер крутящего момента, схематически изображенный на фиг. 1b, который предназначен для передачи запрашиваемого водителем крутящего момента TD, определенного на основании показаний датчика 19 положения педали газа, если крутящий момент TD позволяет достичь более высокой скорости по сравнению со скоростью NE вращения двигателя. Целевую скорость вращения двигателя устанавливают с помощью CSC 25, при этом CSC 25 может иметь встроенную функцию ограничения запрашиваемого крутящего момента.
В устройстве ограничения крутящего момента по фиг. 1b текущий уровень запрашиваемого крутящего момента TECur уменьшают на величину δ, если текущая скорость вращения двигателя превышает целевую скорость NT вращения двигателя, определенную с помощью CSC 25. Если текущая скорость вращения двигателя не превышает целевую скорость NT вращения двигателя, определенную с помощью CSC 25, то используют запрашиваемый водителем крутящий момент TD. Значение δ может быть постоянным или регулируемым. При использовании регулируемого значения оно может зависеть от разности между текущей скоростью вращения двигателя и целевой скоростью вращения двигателя.
CSC 25 работает следующим образом: когда сигнал от датчика 17 положения педали сцепления указывает на выключение сцепления 13, а сигнал от SGS 15 указывает на включение передачи, то CSC 25 может настроить целевую скорость NT вращения двигателя 10 с учетом текущего положения CP педали сцепления.
На фиг. 5 показано схематическое изображение различных состояний сцепления относительно положения CP педали сцепления.
В первой области положений педали сцепления педаль 23 сцепления считается отпущенной (R). В области отпущенного положения сцепление 13 всегда включено.
Во второй области положений педали сцепления педаль сцепления частично нажата (Р). В области частично нажатого положения сцепление 13 переключается из включенного состояния в выключенное. «Tочка переключения» сцепления 13 всегда находится в области нажатого положения. Это связано с тем, что скольжение, приводящее к интенсивному выделению тепла, возникает при частичном включении сцепления 13.
В третьей области положений педали сцепления педаль сцепления полностью нажата (D). В области полностью нажатого положения водитель перемещает педаль сцепления на максимальную величину относительно нормального исходного положения, причем в области полностью нажатого положения сцепление 13 всегда выключено. В области полностью нажатого положения выделения тепла в сцеплении 13 не происходит, поскольку оно выключено.
Для педали сцепления могут быть использованы следующие предельные значения в процентах: для области отпущенного положения -от 0% до 20% от общего хода педали сцепления, для педали сцепления в области частично нажатого положения - от 20% до 85% от общего хода педали сцепления, а в области полностью нажатого положения - от 85% до 100% от общего хода педали сцепления. Переключение происходит при достижении положения, соответствующего 75% от общего хода педали сцепления. На участке перемещения между точкой переключения и точкой начала области полностью нажатого положения сцепления наблюдается скольжение, однако крутящий момент передается в недостаточной мере для обеспечения движения транспортного средства 5.
Области «R», «Р» и «D» устанавливают во время калибровки системы определения положения сцепления, причем указанные значения приведены в качестве примеров возможных откалиброванных значений.
Таким образом, когда датчик 17 положения педали сцепления указывает на полностью нажатое положение CP педали сцепления, а SGS 15 указывает на включение передачи, можно определить, что тепло будет рассеиваться при включении сцепления 13, в результате чего произойдет включение CSC 25, что позволит ограничить величину энергии, рассеиваемой сцеплением 13.
При включенном сцеплении CSC 25 определяет целевую скорость NT вращения двигателя 10. Для этого может быть использована текущая скорость движения по дороге, а прогнозируемое значение скорости NI вращения ведущего вала коробки 12 передач может быть основано на выбранном передаточном отношении. Затем прогнозируемое значение скорости NI вращения ведущего вала будет использовано вместе со скоростью NLSL вращения двигателя в переходной области, зависящей от текущего положения CP педали сцепления, для определения значения целевой скорости NTSL скольжения сцепления. Скорость NLSL вращения двигателя в переходной области изменяется в зависимости от положения CD педали сцепления.
Таким образом, целевая скорость NTSL скольжения сцепления будет следующей: NTSL=(NI+NLSL)
Соотношение между положением CP педали сцепления и скоростью NLSL вращения двигателя в переходной области может иметь любое необходимое значение.
Значение для NLSL может быть сохранено в справочную таблицу в виде соотношения между положением CP педали сцепления и скоростью NLSL вращения двигателя в переходной области или может циклически вычисляться в соответствии с алгоритмом.
Если система включает в себя только CSC 25, то в качестве целевой скорости NT вращения двигателя используют значение целевой скорости NTSL скольжения сцепления.
Как только CSC 25 определит значение NT, электронный контроллер 20 сможет использовать его для регулировки запрашиваемого крутящего момента TE в двигателе 10 таким образом, чтобы скорость NE вращения двигателя стала ближе к целевой скорости NT вращения двигателя. Когда запрашиваемый водителем крутящий момент TD позволяет получить скорость NE вращения двигателя ниже целевой скорости NT вращения двигателя, для управления двигателем 10 сразу будет использоваться скорость NE. Однако, если текущий запрашиваемый водителем крутящий момент TD создает скорость вращения двигателя выше целевой скорости NT вращения двигателя, запрашиваемый водителем крутящий момент TD будет изменен или ограничен таким образом, чтобы скорость вращения двигателя совпадала с целевой скоростью NT вращения двигателя.
Скорость NE вращения двигателя может отличаться от целевой скорости NT вращения двигателя, поскольку в некоторых случаях двигатель 10 не может достаточно быстро остановиться при изменении целевой скорости NT вращения двигателя, при этом скорость NE вращения двигателя будет ограничена целевой скоростью NT вращения двигателя, тем самым ограничивая величину энергии, рассеиваемую сцеплением 13, за счет уменьшения разности скоростей в разных частях сцепления 13.
При включенном CSC 25 двигатель 10 не реагирует на слишком высокие значения запрашиваемого водителем крутящего момента, которые могут привести к тому, что скорость NE вращения двигателя превысит целевую скорость NT вращения двигателя. Это позволяет избежать резких изменений скорости NE вращения двигателя во время включения сцепления, а также снизить рассеиваемую энергию по сравнению с ситуациями, когда происходит резкое изменение скорости вращения.
Соотношение между положением CP педали сцепления и скоростью NLSL вращения двигателя в переходной области может непрерывно изменяться во всем диапазоне хода педали сцепления. Однако предпочтительным является обеспечение небольшой разности между целевой скоростью NT вращения двигателя и скоростью NI вращения ведущего вала, например, около 50 об./мин., даже когда положение педали сцепления находится в области отпущенного положения. В конечном итоге скорость NE вращения двигателя станет равной скорости NI вращения ведущего вала, что произойдет, когда положение CP педали сцепления будет находиться в области отпущенного положения. Это связано с тем, что CSC 25 позволяет достичь только целевой скорости NT вращения двигателя, но не дает настроить фактическую скорость NE вращения двигателя.
Целевая скорость NT вращения двигателя не является постоянным значением, вместо этого она циклически обновляется в зависимости от положения CP педали сцепления и текущей скорости NI вращения ведущего вала коробки 12 передач.
В данном примере электронный контроллер 20 дополнительно содержит контроллер 28 трогания с места, а в других вариантах реализации может также содержать CSC 25.
Контроллер 28 трогания с места предназначен для определения целевой скорости NTL вращения двигателя 10 для трогания с места, позволяющей транспортному средству тронуться с места при низком уровне рассеивания энергии сцеплением 13. Использование скорости вращения двигателя, уровень которой ниже целевой скорости NTL вращения двигателя, для трогания с места при целевой скорости NTL вращения двигателя для трогания с места, устанавливаемой контроллером 28 трогания с места, скорее всего приведет к неудачному троганию с места из-за недостаточного увеличения оборотов или из-за заглохания двигателя 10.
Следует понимать, что CSC 25 и контроллер 28 трогания с места могут представлять собой раздельные блоки и необязательно являются частью одного электронного контроллера, и работа данных контроллеров может быть организована в соответствии с другим способом. Кроме того работа CSC 25 и контроллера 28 трогания с места может быть реализована с помощью программного обеспечения и они могут не быть физическими объектами.
На фиг. 2а-2с представлен пример стандартного понижения передачи и того, как контроллер 25 скольжения (CSC) может ограничить энергию, рассеиваемую сцеплением 13.
На фиг. 2с линией «А» обозначено изменение скорости вращения двигателя при отсутствии регулировки скорости, линией «В» обозначено изменение целевой скорости NT вращения двигателя, установленной с помощью CSC 25 (NT=NTSL), а линией NI обозначено изменение скорости ведущего вала коробки 12 передач. Фактическая скорость NE вращения двигателя будет близка, но может не совпадать с линией «В». Фиг. 2а-2с являются схематичными и необязательно точно описывают фактическое понижение передачи.
В момент времени «0» педаль 23 сцепления перемещают из исходного положения в полностью нажатое положение, а состояние сцепления изменяют с полностью включенного в полностью выключенное.
В момент времени «1» включают пониженную передачу, при этом сцепление 13 полностью выключено (находится в области полностью нажатого положения), а CSC 25 включается и устанавливает целевую скорость NT вращения двигателя, равную в данном случае NT=NI+300 об./мин.
Между моментами «1» и «2» времени происходит отпускание педали 23 сцепления, при этом в момент времени «2» она переходит из области полностью нажатого положения в область частично нажатого положения, а в момент времени «3» при достижении «точки переключения» (ВР) состояние сцепления изменяется с выключенного в частично включенное. В представленном примере в течение указанного промежутка значение целевой скорости NT вращения двигателя остается постоянным на уровне NI+300 об./мин. В других примерах соотношение между скоростью NI вращения ведущего вала и целевой скоростью NT вращения двигателя будет изменяться непрерывно после попадания педали сцепления в область частично нажатого положения.
В момент времени «4» педаль 23 сцепления по-прежнему находится в области частично нажатого положения, при этом сцепление 13 остается практически полностью включенным. CSC 25 устанавливает скорость NLSL вращения двигателя в переходной области на основании положения педали сцепления до тех пор, пока педаль сцепления не будет полностью отпущена при сохранении постоянной положительной разности (50 об./мин.) между скоростью вращения двигателя и текущей скоростью NI вращения ведущего вала коробки 12 передач, в результате чего целевая скорость NT вращения двигателя будет изменяться вместе со скоростью NI вращения ведущего вала, оставаясь на 50 об./мин. больше нее.
Между моментами времени «2» и «4» положение CP педали сцепления находится в области частично нажатого положения, а сцепление 13 находится во включенном положении.
В момент времени «5» сцепление 13 переходит в область отпущенного положения, а в момент времени «6» сцепление 13 полностью включается, при этом скорость NE вращения двигателя синхронизируется со скоростью NI вращения ведущего вала.
Следует понимать, что с течением времени между моментами времени «2» и «4» разность между целевой скоростью NT вращения двигателя и скоростью NI вращения ведущего вала коробки 12 передач постепенно снижается, что позволяет достичь управляемого и плавного переключения передачи.
Поскольку энергия, рассеиваемая сцеплением 13, описывается областью, ограниченной линиями «А» и «NI» для ситуации без регулировки проскальзыванием и линиями «В» и «NI» для ситуации с регулировкой проскальзыванием, предполагается, что скорость NE вращения двигателя всегда равна целевой скорости NT вращения двигателя, которая необязательно является фактической скоростью вращения двигателя, и не контролируется напрямую. Таким образом, энергия, рассеиваемая сцеплением 13, будет снижаться на величину, примерно соответствующую области над линией «В» и ограниченную линиями «А» и «В» (на самом деле, ограниченную фактической скоростью NE вращения двигателя (не показана) и линией А).
Таким образом, может быть достигнуто значительное снижение энергии, рассеиваемой сцеплением 13, по сравнению с ситуацией, когда скорость вращения двигателя не ограничена, при этом такое пониженное рассеивание энергии приводит к снижению температуры сцепления и уменьшению износа сцепления.
На фиг. 3а-3с' показан стандартный процесс трогания с места и то, как контроллер скольжения CSC 25 может быть использован для снижения или ограничения объема энергии, рассеиваемой сцеплением 13.
На фиг. 3с и 3с' линией «А» обозначено изменение скорости вращения двигателя без регулировки скольжения, линией «В» обозначено изменение целевой скорости NT вращения двигателя 10 для трогания с места, линией «С» обозначено изменение целевой скорости NTSL вращения двигателя, полученной с помощью контроллера 25 скольжения сцепления, а линией NI обозначено изменение скорости вращения ведущего вала коробки передач. Фиг. 3а-3с' являются схематичными и не обязательно описывают реальный процесс трогания с места.
В момент времени «0» педаль 23 сцепления находится в области отпущенного положения и начинает перемещаться из исходного положения в сторону полностью нажатого положения. Поскольку в текущий момент времени скорость транспортного средства равна нулю, электронный контроллер 20 определяет, что необходимо выполнить действия для выполнения трогания транспортного средства 5 с места.
Между моментами времени «0» и «1» состояние сцепление меняется с включенного на выключенное, а педаль 23 сцепления перемещается в полностью нажатое положение.
В момент времени «1» включается передача для трогания с места, например, первая передача, сцепление 13 находится в полностью выключенном положении, а контроллер 25 скольжения сцепления и контроллер 28 трогания с места продолжают работать.
CSC 25 устанавливает целевую скорость NTSL вращения двигателя, равную NI+300 об./мин. и, поскольку в течение этого временного отрезка NI=0, то NTSL=300 об./мин. Контроллер 28 трогания с места устанавливает целевую скорость NTL вращения двигателя для трогания с места, которая в данном случае равна 1200 об./мин., но на практике может иметь другое значение. Целевая скорость NT вращения двигателя 10 устанавливается равной максимальному значению из NTL и NTSL, в результате чего в данном случае целевая скорость NT вращения двигателя становится равной 1200 об./мин. Двигатель 10 может начинать увеличивать частоту вращения для достижения данной целевой скорости вращения двигателя и достигает ее в данном случае в момент «3» времени, что соответствует времени достижения точки переключения сцепления 13.
В момент времени «2» педаль 23 сцепления переходит в область частично нажатого положения, сцепление 23 частично включается, но точка переключения (ВР) не достигается, а значения для NT, NTL и NTSL остаются теми же, что в промежутке между моментами времени «1» и «3».
В момент времени «3» педаль 23 сцепления была перемещена из области полностью нажатого положения в область частично нажатого положения, а состояние сцепления изменилось с выключенного на частично включенное (то есть была достигнута так называемая «точка переключения», в которой включается привод).
Между моментами времени «3» и «4» значение целевой скорости NTL вращения двигателя для трогания с места остается прежним, а целевая скорость NTSL скольжения сцепления увеличиваются вместе со скоростью NI вращения ведущего вала коробки передач, однако она растет не так быстро, как скорость NI вращения ведущего вала, поскольку CSC 25 работает таким образом, чтобы целевая скорость NTSL скольжения сцепления совпадала со скоростью NI вращения ведущего вала на данном временном отрезке. Целевая скорость NT вращения двигателя остается равной NTL, поскольку NTL>NTSL.
В момент времени «4» сцепление 13 почти достигает включенного положения, а целевая скорость NT вращения двигателя по-прежнему зависит от целевой скорости NTL вращения двигателя для трогания с места, установленной контроллером 28 трогания с места для обеспечения оптимального трогания с места.
В момент времени «4» педаль 23 сцепления остается в области частично нажатого положения, при этом сцепление 13 почти полностью включено. CSC 25 устанавливает скорость NLSL вращения двигателя в переходной области для данного положения педали сцепления до тех пор, пока педаль сцепления не будет полностью отпущена, таким образом, чтобы ее значение превышало текущую скорость NI вращения ведущего вала коробки 12 передач на постоянную величину (50 об./мин.), поэтому целевая скорость NTSL вращения двигателя изменяется вместе со скоростью NI вращения ведущего вала, оставаясь при этом на 50 об./мин. выше нее.
Скорость NE вращения двигателя не полностью синхронизирована со скоростью NI вращения ведущего вала, а целевая скорость NTSL скольжения сцепления, полученная контроллером 25 скольжения, остается ниже целевой скорости NT вращения двигателя, установленной контроллером 28 трогания с места.
Таким образом, в момент времени «4» соотношение между скоростью NI вращения ведущего вала и положением CP педали сцепления изменяется таким образом, что при положениях CP педали сцепления, в которых разность скоростей равна или меньше постоянного значения (50 об./мин.), устанавливается целевая скорость NTSL скольжения сцепления. При этом данное изменение может происходить при другом положении педали сцепления и не относится к тому факту, что в данном примере водитель начинает поездку, не изменяя положение педали 23 сцепления в данный момент времени.
В момент времени «5» сцепление 13 переходит в область отпущенного положения и полностью включается, а в момент времени «6» скорость NE вращения двигателя синхронизируется со скоростью NI вращения ведущего вала.
В промежутке между моментами времени «4» и «5» целевая скорость NT вращения двигателя изменяется с целевого значения NTL, установленного контроллером 28 трогания с места, на целевое значение скорости NTSL, установленной с помощью CSC 25, поскольку в определенный момент данного временного промежутка целевая скорость NTSL, полученная CSC 25, превышает целевую скорость NTL, полученную контроллером 28 трогания с места.
Контроллер 28 трогания с места предназначен для того, чтобы поддерживать скорость NE вращения двигателя в пределах между нижним и верхним предельными значениями, которые были выбраны таким образом, что гарантировать оптимальное трогание с места при минимальным выделении чрезмерной энергии.
Если для трогания транспортного средства с места используют только CSC 25, то двигатель 10 может заглохнуть или очень медленно наращивать обороты, поскольку целевая скорость NTSL, полученная на основе скорости NLSL вращения двигателя в переходной области и NI, будет ниже скорости NE вращения двигателя, необходимой для успешного трогания транспортного средства 5 с места.
Однако, если для трогания транспортного средства с места используют только контроллер 28 трогания с места, то он затормозит увеличение скорости NE вращения двигателя в конце этапа трогания с места, когда NE=NI, в результате чего произойдет ограничение ускорения транспортного средства 5.
Эффективность использования двух контроллеров 25, 28 будет очевидней при рассмотрении графика по фиг. 3с', на котором представлено увеличенное изображение области «X» по фиг. 3с.
Регулировка целевой скорости NT вращения двигателя основана на использовании максимального из значений скорости NTL вращения двигателя, полученной контроллером 28 трогания с места, и целевой скорости NTSL вращения двигателя, полученной контроллером 25 скольжения.
Таким образом, слева от точки «Р» на фиг. 3с' NTL будет равна более высокому значению из двух предельных значений скоростей NTSL, NTL, после чего целевая скорость NT вращения двигателя будет установлена на этом уровне.
Предельное значение скорости NTL вращения двигателя при трогании с места может быть равно либо заранее установленному постоянному значению для транспортного средства 5 или может быть определено на основании текущих условий работы транспортного средства 5, например, на основании его веса и определения нахождения на подъеме, спуске или горизонтальной поверхности.
Справа от точки «Р» предельное значение скорости NTSL вращения двигателя, полученное с помощью CSC 25, выше предельного значения скорости NTL вращения двигателя для трогания с места, полученного с помощью контроллера 28 трогания с места, поэтому именно это значение используют в качестве целевой скорости NT вращения двигателя вместо целевой скорости NTL трогания с места.
При использовании только предельного значения скорости NTL вращения двигателя для трогания с места двигатель 10 не может ускориться до уровня, превышающего скорость NTL при включенном контроллере 28 трогания с места, который не выключается до тех пор, пока существует положительная разность скоростей между скоростью NE вращения двигателя и скоростью NI вращения ведущего вала коробки 12 передач.
Таким образом, при возникновении проскальзывания из-за действий водителя, нажимающего на педаль 23 сцепления, скорость NE вращения двигателя никогда не будет равна скорости NI вращения ведущего вала, из-за чего энергия, рассеиваемая сцеплением 23, будет образовываться до тех пор, пока водитель полностью не отпустит педаль 23 сцепления. Однако при использовании CSC 25 можно продолжить увеличивать скорость вращения двигателя, поддерживая уровень скольжения на низком уровне, что позволит плавно завершить этап трогания с места с достаточным ускорением и без чрезмерного рассеивания энергии сцеплением 23. Следовательно, в данном случае водитель, нажимающий на педаль сцепления, не ограничивает величину ускорения транспортного средства 5 так же, как и при использовании целевой скорости NTL вращения двигателя для трогания с места.
Как и в предыдущих случаях, скорость NLSL вращения двигателя в переходной области, полученная с помощью CSC 25, изменяется вместе с положением CP педали сцепления.
Как и в предыдущих случаях, можно достичь значительного снижения энергии, рассеиваемой сцеплением 13, что позволит снизить температуру сцепления и уменьшить износ сцепления.
На фиг. 4 показан пример графика значений при повышении передачи. Графики зависимости положения сцепления и переключения передачи не показаны, поскольку они аналогичны графикам на фиг. 2а и 2b, за исключением того, что в случае на фиг. 2b должно быть показано повышение, а не понижение передачи.
На фиг. 4 линией «А» обозначено изменение скорости вращения двигателя без регулировки скорости, линией «В» обозначено изменение целевой скорости NT вращения двигателя 10 в переходной области, а линией NI обозначено изменение скорости ведущего вала коробки передач. Фиг. 4 является схематичной и необязательно точно описывает фактическое переключению передачи.
В момент времени «0» педаль 23 сцепления перемещают из исходного положения в сторону полностью нажатого положения, а состояние сцепления меняется с включенного на выключенное.
В момент времени «1» выполняют повышение передачи, при этом сцепление 13 выключено, а скорость NI вращения ведущего вала опускается ниже повышенного передаточного числа, поэтому транспортное средство начинает замедляться.
CSC 25 включается в момент времени «1», когда включается передача, и начинает увеличивать скорость NE вращения двигателя до уровня целевой скорости NT вращения двигателя.
Когда педаль 23 сцепления перемещается из области полностью нажатого положения в область частично нажатого положения, то есть в период между моментами времени «1» и «2», предельное значение переходной скорости NLSL вращения двигателя устанавливается равным 300 об./мин., поэтому целевая скорость NT вращения двигателя будет на 300 об./мин. выше текущей скорости NI вращения ведущего вала и будет изменяться вместе со скоростью NI вращения ведущего вала.
В момент времени «3» педаль 23 сцепления находится в области частично нажатого положения, а сцепление является частично включенным, то есть находится в так называемой «точке переключения», в которой включается привод. Скорость NLSL вращения двигателя в переходной области начинает изменяться на основании положения CP педали сцепления до тех пор, пока в момент времени «4» сцепление 13 не достигнет положения, в котором оно будет практически включено, а скорость NLSL вращения двигателя в переходной области затем будет поддерживаться с помощью CSC 25 на постоянном уровне, превышающем текущую скорость NI вращения ведущего вала коробки 12 передач до выключения сцепления.
В момент времени «5» включают сцепление 13, положение педали сцепления переходит в область отпущенного положения, а в момент времени «6» педаль 23 сцепления переходит в полностью отпущенное положение и скорость NE вращения двигателя синхронизируется со скоростью NI вращения ведущего вала.
Между моментами времени «1» и «6» CSC 25 остается включенным и снижает скорость Ne вращения двигателя до целевой скорости NT вращения двигателя, обозначенной с помощью линии «В».
Как и в предыдущих случаях, энергия, рассеиваемая сцеплением 13, напрямую соотносится с областью, ограниченной линиями «А» и «NI» для нерегулируемого скольжения, и ограниченной линиями «В» и «NI» для регулируемого скольжения. На практике данная область ограничена фактическими значениями скоростью NE вращения двигателя и NI, но поскольку скорость NE вращения двигателя связана с целевой скоростью NT вращения двигателя, то область, ограниченная линиями «В» и «NI», обеспечивает достаточное приближение.
Таким образом, энергия, рассеиваемая сцеплением 13, уменьшается на величину, аналогичную области над линией «В» и ограниченную линиями «А» и «В», что является значительным снижением энергии, рассеиваемой сцеплением 13, и приводит к снижению температуры сцепления и уменьшению износа сцепления.
Скорость NLSL вращения двигателя в переходной области может изменяться в зависимости от положения CP педали сцепления, обеспечивая то, что разность между целевой скоростью NTSL скольжения сцепления и скоростью NI вращения ведущего вала будет снижаться при перемещении педали сцепления из полностью нажатого положения в отпущенное положение.
На фиг. 6 показан первый вариант 100 реализации способа снижения величины энергии, рассеиваемой фрикционным сцеплением во время включения сцепления, что особенно эффективно при включении коробки передач.
Способ начинается на этапе 110, а затем переходит на этап 120, на котором проверяют, включена ли передача в коробке 12 передач и выключено ли сцепление 13.
Если положение CP педали сцепления указывает на выключенное состояние сцепления 13 или на то, что передача не включена, способ циклически выполняет этап 120. При отсутствии отдельного датчика скорости для определения скорости NI вращения ведущего вала коробки 12 передач необходимо включить передачу, кроме того, когда коробка 12 передач находится в нейтральном положении, энергия практически не рассеивается сцеплением 13.
При соблюдении условий этапа 120 способ переходит на этап 130, на котором определяют текущую скорость NI вращения ведущего вала коробки 12 передач. С помощью датчика могут быть выполнены прямые измерения, а с помощью текущего выбранного передаточного числа и эффективной передачи привода от коробки 12 передач на дорогу может быть выполнен расчет скорости транспортного средства.
После этапа 130 способ переходит на этап 140, на котором на основании положения CP педали сцепления определяют текущее состояние сцепления.
Затем на этапе 150 для определения текущего значения целевой скорости NT вращения двигателя используют значение CP. Как было указано ранее, целевая скорость NT вращения двигателя основана на текущей скорости NI вращения ведущего вала и значении NLSL, полученном с помощью CSC 25 на основании положения CP педали сцепления.
Следовательно, целевая скорость NT вращения двигателя: NT=NTSL=(NI+NLSL)
Другими словами, в данном случае в качестве целевой скорости NT вращения двигателя используется только целевая скорость NTSL скольжения сцепления.
При переходе с этапа 150 на этап 160 проверяют, превышает ли текущая скорость NE вращения двигателя, полученная с помощью датчика 14 скорости вращения двигателя, целевую скорость NT вращения двигателя.
Если текущая скорость NE вращения двигателя не превышает целевую скорость NT вращения двигателя, то способ переходит на этап 180, на котором проверяют, равны ли текущая скорость NE вращения двигателя и текущая скорость NI вращения ведущего вала, и при получении положительного результата способ 100 завершается на этапе 190, а при получении отрицательного результата способ возвращается на этап 130.
Если на этапе 160 определяют, что текущая скорость NE вращения двигателя, полученная с помощью датчика 14 скорости вращения двигателя, превышает целевую скорость NT вращения двигателя, способ переходит на этап 170.
На этапе 170 электронный контроллер 20 регулирует работу двигателя 10 таким образом, чтобы его скорость стала ближе к целевой скорости NT вращения двигателя. В большинстве случаев это вызвано сниженным запрашиваемым крутящим моментом таким образом, что двигатель 10 может быть пассивно замедлен, но может быть использовано активное торможение двигателя, достигаемое либо за счет включения нагрузки на двигатель 10 с помощью установленного электронного генератора или компрессора, либо за счет закрытия дроссельного клапана или устройства торможения дросселированием выхлопа.
После этапа 170 способ возвращается на этап 130 и повторно выполняет последующие этапы.
При включенном сцеплении целевая скорость NT вращения двигателя не является постоянной, вместо этого ее значение будет циклически обновляться вместе со значением целевой скорости NTSL скольжения сцепления. Для циклического обновления может быть использована длительность цикла, примерно равная 10 мс.
На фиг. 7 показан второй вариант 200 реализации способа ограничения величины энергии, рассеиваемой фрикционным сцеплением во время включения сцепления, что особенно эффективно при трогании с места транспортного средства.
Способ начинается на этапе 210, а затем переходит на этап 215, на котором проверяют, включена ли передача в коробке 12 передач и выключено ли сцепление 13.
Если положение CP педали сцепления указывает на выключенное состояние сцепления 13 или на то, что передача не включена, способ циклически выполняет этап 215. При отсутствии отдельного датчика скорости для определения скорости NI вращения ведущего вала коробки 12 передач необходимо включить передачу, а когда коробка 12 передач находится в нейтральном положении, энергия практически не рассеивается сцеплением 13.
При соблюдении условий этапа 215 способ переходит на этап 220, на котором целевую скорость NTL вращения двигателя при трогании с места устанавливают на основании сохраненных параметров или на основании прямых вычислений. Диапазон значений целевой скорости трогания с места может быть установлен таким образом, чтобы гарантировать успешный запуск при низком рассеивании энергии сцеплением 13.
С этапа 220 способ переходит на этап 230, на котором определяют текущую скорость NI вращения ведущего вала коробки 12 передач. С помощью датчика могут быть выполнены прямые измерения, а с помощью текущего выбранного передаточного числа и эффективной передачи привода от коробки 12 передач на дорогу может быть выполнен расчет скорости транспортного средства. Текущее положение CP педали сцепления также определяют на этапе 230 на основании выходного сигнала датчика 17 положения педали сцепления, однако данное измерение может быть выполнено на отдельном этапе.
С этапа 230 способ переходит на этап 240, на котором текущее положение CP педали сцепления используют вместе со значением текущей скорости NI вращения ведущего вала для получения значения целевой скорости NTSL скольжения сцепления. NTSL=(NI+NLSL)
Затем на этапе 250 значение NTL от контроллера 28 трогания с места сравнивают со значением NTSL, полученным с помощью CSC 25.
Если значение NTL больше значения NTSL, то значение NTL используют для значения целевой скорости NT вращения двигателя, как показано на этапе 260, в противном случае значение NTSL используют для значения целевой скорости NT вращения двигателя, как показано на этапе 270.
С этапа 260 способ переходит на этап 265 для проверки, является ли скорость NE вращения двигателя практически равной текущей скорости NI вращения ведущего вала коробки 12 передач, при получении положительного ответа способ 200 завершается на этапе 290. Разность между скоростью NE вращения двигателя и скоростью NI вращения ведущего вала может быть очень небольшой, поэтому данная проверка предназначена для того, чтобы определить, синхронизирована ли работа двигателя 10 и коробки 12 передач, то есть это позволяет исключить регулировку скольжения.
Если на этапе 265 будет определено, что текущая скорость NE вращения двигателя не равна текущей скорости NI вращения ведущего вала коробки 12 передач, способ возвращается на этап 230 и повторно выполняет последующие этапы.
После этапа 270 способ переходит на этап 280, на котором проверяют, равна ли текущая скорость NE вращения двигателя текущей скорости NI вращения ведущего вала коробки 12 передач, при получении положительного результата способ 200 завершается на этапе 285.
Если на этапе 280 будет определено, что текущая скорость NE вращения двигателя не равна текущей скорости NI вращения ведущего вала коробки 12 передач, то способ возвращается на этап 230 и повторно выполняет последующие этапы.
В данном примере после выбора целевую скорость NTL вращения трогания с места поддерживают на постоянном уровне в течение этапа трогания с места. Однако в другом варианте реализации значение для целевой скорости трогания с места может циклически обновляться вместе со значением целевой скорости NTSL скольжения сцепления. Для циклического обновления может быть использована длительность цикла, примерно равная 10 мс.
На фиг. 8 показано, как способы по фиг. 6 и 7 могут быть объединены для получения способа, используемого при трогании транспортного средства с места или переключении передач.
На этапе 310 способа 300 определяют, движется ли транспортное средство 5, и при получении положительного результата переходят на этап 320, то есть на этап 110 по фиг. 6, а при получении отрицательного результата переходят с этапа 310 на этап 330, то есть на этап 210 по фиг. 7.
Представленные и описанные способы являются иллюстративными и настоящее изобретение не ограничивается конкретным сочетанием этапов способа или показанной или описанной последовательностью.
В общем случае способ позволяет получить значение целевой скорости NT вращения двигателя 10, основанное, по меньшей мере, частично на состоянии сцепления 13.
При выключенном сцеплении 13 может присутствовать большая разность (NE-NI) скоростей вращения двигателя 10 и ведущего вала коробки 12 передач, но при включении сцепления 13 происходит уменьшение допустимой разности скоростей (NE-NI).
В предпочтительном варианте реализации между целевой скоростью вращения двигателя NT и скоростью NI вращения ведущего вала поддерживается небольшая положительная разность, даже когда сцепление 13 полностью включено для обеспечения нормальных ощущений в конце включения сцепления.
За счет уменьшения допустимой разности (NE-NI) скоростей двигателя 10 и ведущего вала коробки 12 передач на основании состояния сцепления, обеспечивают более плавный переход и снижают риск возникновения вибраций трансмиссии.
Хотя настоящее изобретение было описано на примере одного или нескольких вариантов реализации, оно не ограничивается раскрытым вариантом осуществления, и могут быть определены дополнительные варианты реализации без отступления от сущности изобретения.
Реферат
Изобретение относится к транспортным средствам. В способе ограничения величины энергии, рассеиваемой фрикционным сцеплением дорожного транспортного средства, соединяющим и передающим движение от двигателя на коробку передач, когда сцепление включено, а коробка передач находится в положении передачи, определяют целевую скорость вращения двигателя и регулируют работу двигателя на основании его целевой скорости вращения. Целевая скорость вращения двигателя представляет собой целевую скорость скольжения сцепления, зависящую от сочетания текущей скорости ведущего вала коробки передач и скорости в переходной области на основании состояния сцепления. Снижается выделение тепла в сцеплении. 3 н. и 15 з.п. ф-лы, 8 ил.
Комментарии