Система электронной стабилизации автомобиля (варианты) и способ управления крутящим моментом (варианты) - RU2243429C2
Код документа: RU2243429C2
Чертежи

Описание
Изобретение относится к автомобилю, содержащему устройство для автоматического приведения в действие сцепления в системе привода, блок управления автоматическим срабатыванием сцепления, находящийся в сигнальной связи с электронной системой стабилизации, которая подает управляющий сигнал в случае своей активности, и управляемый блоком управления исполнительный механизм для установления передаваемого сцеплением крутящего момента. Кроме того, изобретение относится к соответствующему способу.
Электронные системы стабилизации в автомобилях в целом известны, например, из публикации ФРГ VDI-Report 1224. Эта электронная система стабилизации включает в себя, например, противоблокировочную тормозную систему (ABS), регулирующую систему противоскольжения (ASR) и/или систему управления тяговым усилием. Система стабилизации распознает с помощью подаваемых датчиками сигналов ситуацию движения или дорожную ситуацию автомобиля и сравнивает эти сигналы датчиков с типичными данными дорожных ситуаций, хранящимися в памяти электронной части системы. За счет этого можно распознавать актуальную дорожную ситуацию. Если актуальная дорожная ситуация автомобиля отличается от хранящихся в памяти некритических ситуаций или если актуальная дорожная ситуация автомобиля соответствует хранящимся в памяти критическим ситуациям, то электронная система стабилизации управляет исполнительными системами на колесах и/или двигателе автомобиля для того, чтобы превратить актуальную ситуацию, признанную критической, в некритическую ситуацию. Например, могут быть приторможены по меньшей мере отдельные колеса или может быть целенаправленно уменьшена мощность приводного двигателя. В ситуации с проскальзыванием колес оказывается воздействие на момент двигателя путем управления положением дроссельной заслонки или на тормозное усилие отдельных колес посредством противоблокировочной системы. За счет этого мощность привода проскальзывающих колес уменьшается, а проскальзывание устраняется. Электронная система стабилизации содержит далее датчик, который определяет повороты автомобиля вокруг его вертикальной оси. За счет этого можно определять процессы заноса автомобиля и противодействовать им посредством целенаправленного процесса управления.
В заявке ФРГ №4316421 раскрыто устройство для приведения в действие фрикционного сцепления автомобиля, у которого в противоположность настоящему изобретению сцепление удерживается в существующем положении только в случае ситуации проскальзывания колес или уменьшается степень регулирования сервопривода.
Задачей изобретения является создание автомобиля с автоматически управляемым сцеплением и электронной системой стабилизации, которая повышала бы безопасность пассажиров.
Далее задачей изобретения является создание такого управления автоматическим сцеплением и электронной системой стабилизации, а также соответствующих блоков управления, чтобы уменьшить или предотвратить взаимные нарушения соответствующих процессов регулирования или управления и способствовать, таким образом, повышению безопасности.
Согласно изобретению это достигается за счет того, что при автоматическом срабатывании сцепления и при наличии характеризующего активность электронной системы стабилизации управляющего сигнала блок управления управляет передаваемым сцеплением крутящим моментом посредством исполнительного механизма с актуально отрегулированного значения передаваемого крутящего момента до его максимального значения.
Согласно другой идее изобретения это достигается за счет того, что при автоматическом срабатывании сцепления и при наличии характеризующего активность электронной системы стабилизации управляющего сигнала блок управления сохраняет передаваемый сцеплением крутящий момент без изменений.
Согласно еще одной идее изобретения это достигается также за счет того, что при автоматическом срабатывании сцепления и при наличии характеризующего активность электронной системы стабилизации управляющего сигнала блок управления уменьшает передаваемый сцеплением крутящий момент посредством исполнительного механизма с актуально отрегулированного значения передаваемого крутящего момента до его меньшего значения.
Далее предпочтительно, если помимо автоматического срабатывания сцепления происходит автоматическое срабатывание коробки передач посредством по меньшей мере одного исполнительного механизма и управляющего исполнительным механизмом блока управления.
В другом примере выполнения целесообразно, если управление увеличением или уменьшением передаваемого сцеплением крутящего момента посредством блока управления и исполнительного механизма происходит при наличии управляющего сигнала, характеризующего активность, со скоростью, равной или большей, чем управляемая скорость при управлении в отсутствие управляющего сигнала.
Также целесообразно, если управление увеличением или уменьшением передаваемого сцеплением крутящего момента посредством блока управления и исполнительного механизма происходит при наличии управляющего сигнала, характеризующего активность, со скоростью, меньшей, чем управляемая скорость при управлении в отсутствие управляющего сигнала.
Также целесообразно, если управление увеличением или уменьшением передаваемого сцеплением крутящего момента происходит при наличии управляющего сигнала, характеризующего активность, со скоростью, равной или большей, чем управляемая скорость при управлении в отсутствие управляющего сигнала, даже если в отсутствие такого управляющего сигнала предаваемый крутящий момент или включенное положение сцепления в основном не изменились бы.
Согласно другой идее изобретения это достигается также за счет того, что управление увеличением или уменьшением передаваемого сцеплением крутящего момента происходит при наличии управляющего сигнала, характеризующего активность, со скоростью, меньшей, чем управляемая скорость при управлении в отсутствие управляющего сигнала, даже если в отсутствие такого управляющего сигнала передаваемый крутящий момент или включенное положение сцепления в основном не изменились бы.
Согласно еще одной идее изобретения это достигается также за счет того, что блок управления управляет передаваемым сцеплением крутящим моментом при наличии управляющего сигнала, характеризующего активность, до максимального значения или управляет сцеплением во включенном положении по меньшей мере до тех пор, пока не будет выработан отличающийся от него управляющий сигнал, например, в процессе переключения передач.
Целесообразно также, если блок управления вырабатывает управляющий сигнал для включения или выключения сцепления только при наличии управляющего сигнала, выработанного и/или переданного электронной системой стабилизации.
Особенно целесообразно, если после вырабатывания управляющего сигнала, характеризующего активность электронной системы стабилизации, и/или при наличии сигнала, характеризующего окончание активности электронной системы стабилизации, блок управления управляет передаваемым крутящим моментом сцепления до значения, соответствующего актуальному рабочему положению.
Целесообразно, если передаваемый крутящий момент, отрегулированный до соответствующего рабочему положению значения, принимает значение в диапазоне между минимальным и максимальным значениями передаваемого сцеплением крутящего момента.
Также целесообразно, если минимальное значение в основном равно нулю, а максимальное значение представляет собой максимально устанавливаемое значение.
Согласно другой идее изобретения для способа управления передаваемым сцеплением автомобиля крутящим моментом посредством устройства для автоматического приведения в действие сцепления в системе привода, содержащего блок управления автоматическим срабатыванием сцепления, находящийся в сигнальной связи с электронной системой стабилизации, которая подает управляющий сигнал в случае своей активности, и управляемый блоком управления исполнительный механизм для установления управляемого блоком управления и передаваемого сцеплением крутящего момента, является предпочтительным, если блок управления при автоматическом срабатывании сцепления выполняет следующие операции:
- оценку наличия в блоке управления управляющего сигнала, характеризующего активность электронной системы стабилизации;
- при наличии этого сигнала управление передаваемым сцеплением крутящим моментом посредством исполнительного механизма с актуально отрегулированного значения передаваемого крутящего момента до его максимального значения.
Согласно еще одной идее изобретения для способа управления передаваемым сцеплением автомобиля крутящим моментом посредством устройства для автоматического приведения в действие сцепления в системе привода, содержащего блок управления автоматическим срабатыванием сцепления, находящийся в сигнальной связи с электронной системой стабилизации, которая подает управляющий сигнал в случае своей активности, и управляемый блоком управления исполнительный механизм для установления управляемого блоком управления и передаваемого сцеплением крутящего момента, является предпочтительным, если блок управления при автоматическом срабатывании сцепления выполняет следующие операции:
- оценку наличия в блоке управления управляющего сигнала, характеризующего активность электронной системы стабилизации;
- при наличии этого сигнала управление передаваемым сцеплением крутящим моментом посредством исполнительного механизма с актуально отрегулированного значения передаваемого крутящего момента до его задаваемого уменьшенного значения.
Согласно другой идее изобретения для способа управления передаваемым сцеплением автомобиля крутящим моментом посредством устройства для автоматического приведения в действие сцепления в системе привода, содержащего блок управления автоматическим срабатыванием сцепления, находящийся в сигнальной связи с электронной системой стабилизации, которая подает управляющий сигнал в случае своей активности, и управляемый блоком управления исполнительный механизм для установления управляемого блоком управления и передаваемого сцеплением крутящего момента, является предпочтительным, если блок управления при автоматическом срабатывании сцепления выполняет следующие операции:
- оценку наличия в блоке управления управляющего сигнала, характеризующего активность электронной системы стабилизации;
- при наличии этого сигнала поддержание актуального значения передаваемого сцеплением крутящего момента посредством исполнительного механизма.
Изобретение более подробно поясняется с помощью чертежей, на которых изображено:
на фиг.1 схематично изображен автомобиль с устройством согласно изобретению;
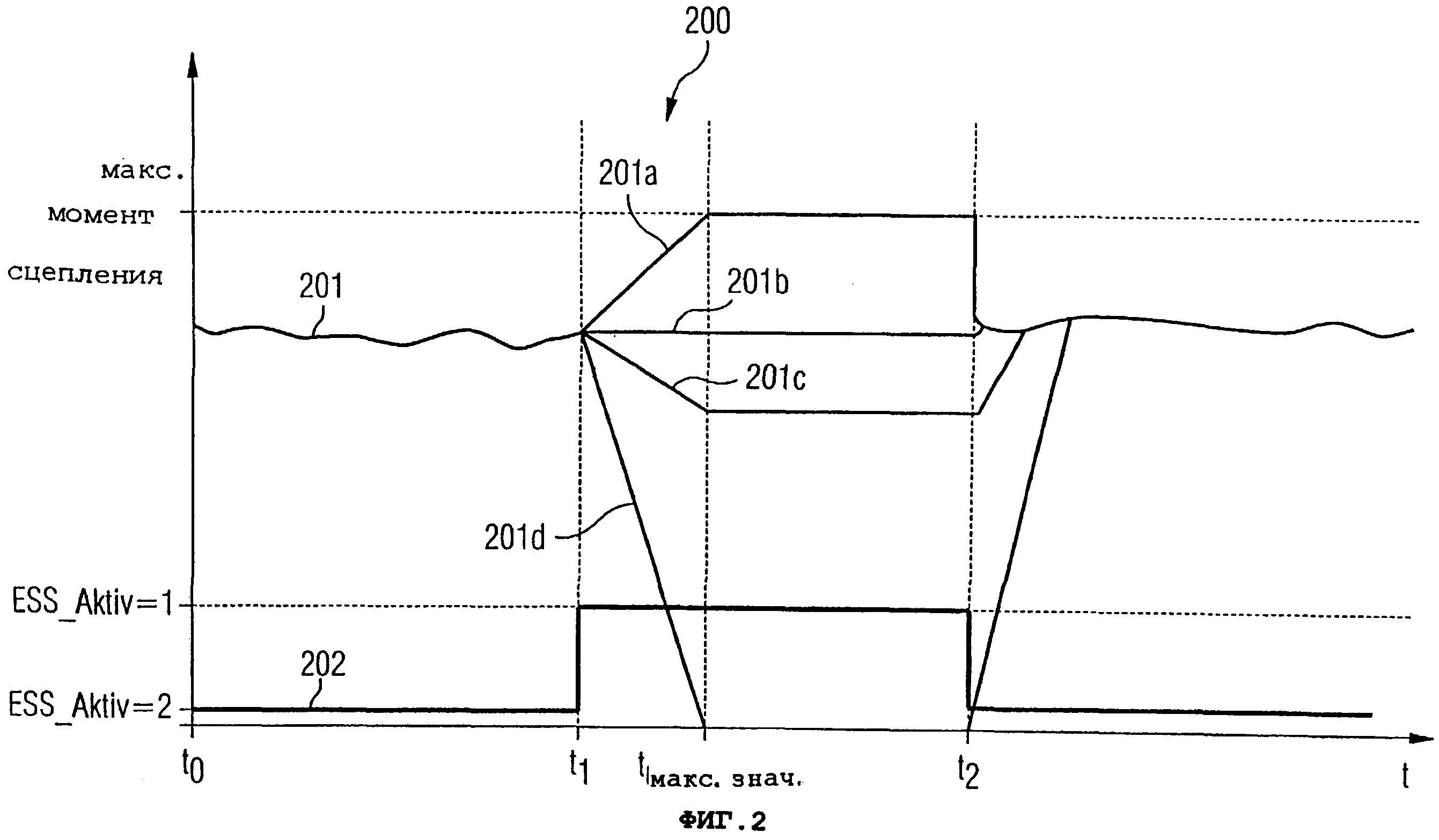
фиг.2 - диаграмма;
фиг.3 - блок-схема.
На фиг.1 изображен автомобиль 1 с приводным двигателем 2, например ДВС, сцеплением 3, например фрикционным, и коробкой 4 передач, причем за коробкой передач расположен ведущий мост 5, который посредством дифференциала 6 приводит два ведущих вала 7а, 7b, приводящих, в свою очередь, ведущие колеса 8а, 8b.
Сцепление 3 изображено в виде фрикционного сцепления на маховике 9 ДВС, содержащего нажимной диск 10, ведомый диск 11, подшипник 12 выключения и вилку 13 выключения, причем вилка выключения сцепления нагружается усилием посредством исполнительного механизма 15, содержащего цилиндр-датчик 16 линии 17 с рабочей жидкостью, например гидролинии, и цилиндр-приемник 18, и тем самым срабатывает с целенаправленным управлением. Исполнительный механизм 15 изображен в виде исполнительного механизма с гидроуправлением, содержащего электродвигатель 19, который через не показанную на чертеже передачу, например червячную или цилиндрическую зубчатую передачу, приводит в действие поршень 20 цилиндра-датчика, так что через гидролинию 17 и цилиндр-приемник 18 система передачи крутящего момента, такая как сцепление, может быть включена и выключена. Далее исполнительный механизм содержит в корпусе электронный блок 50 управления с микропроцессором и памятью для приведения в действие и управления исполнительным механизмом 15, т.е. силовая и управляющая электроника могут быть расположены в корпусе исполнительного механизма. Далее может быть также предпочтительным, если силовая электроника для управления электродвигателем расположена в отдельном корпусе.
Исполнительный механизм снабжен подпиточным отверстием 21, связанным с резервуаром 22 для рабочей жидкости. Блок управления тем самым встроен в исполнительный механизм 15, причем он может быть, однако, смонтирован в отдельном корпусе.
Коробка 4 передач и тем самым соответствующие передачи коробки 4 могут переключаться вручную рычагом 30, причем между рычагом 30 переключения и исполнительным элементом коробки передач предусмотрено механическое соединение, реализованное, например, тросами Боудена, рычажными механизмами или тросовыми тягами. Рычаг 30 может переключаться при этом между соответствующими положениями переключения (ступенями) коробки передач и нейтральным положением. Датчик 31 обнаружения ступени, который сочленен с рычагом переключения и/или с исполнительным элементом коробки передач, определяет соответствующее положение включения и тем самым включенную передачу. Точно так же с помощью этого датчика можно определять срабатывание, например движение рычага переключения. Это срабатывание, регистрируемое электронным блоком управления, оценивается как намерение переключения, в результате чего в начале процесса переключения сцепление автоматически выключается, а по окончании процесса переключения при включенной передаче снова включается. Далее, с рычагом переключения может быть сочленен отдельный датчик 32 обнаружения намерения переключения, который определяет движение или действующее на рычаг переключения усилие. По этим сигналам датчика блок управления определяет намерение переключения и выключает сцепление.
При наличии автоматически управляемой коробки 4 передач блок 50 управления может также управлять исполнительным механизмом 60 для автоматического приведения в действие коробки передач. Исполнительный механизм 60 содержит, например, электродвигатели и передаточные механизмы для приведения в действие установленных внутри коробки 4 передач переключающих или исполнительных элементов. Передаточные механизмы преобразуют при этом вращательное движение выходного вала электродвигателя в движение срабатывания. На коробке 4 передач или на исполнительном механизме 60 установлен датчик 31 обнаружения передачи, который определяет по меньшей мере актуально включенную передачу и направляет информацию дальше к блоку 50 управления.
Коробка передач может срабатывать посредством рычага переключения вручную или автоматически посредством исполнительного механизма, управляемого блоком управления.
Автомобиль 1 с автоматической коробкой 4 передач содержит исполнительный элемент 30, на котором установлен по меньшей мере один датчик 32 намерения переключения или датчик 31 выбора передачи, который определяет намерение водителя к переключению или включение водителем передачи и направляет эту информацию дальше к блоку управления. Далее, автомобиль оснащен по меньшей мере одним датчиком 33 частоты вращения, который определяет частоту вращения ведомого вала коробки передач или частоту вращения колес. Этот датчик 33 может использоваться также в качестве датчика скорости автомобиля. Далее установлен датчик 34 положения дроссельной заслонки, который определяет положение дроссельной заслонки, и датчик 35 частоты вращения, который определяет частоту вращения двигателя.
Датчик 31 обнаружения передачи определяет положение установленных внутри коробки передач переключающих элементов или включенную в коробке 4 передачу, так что посредством сигнала с помощью блока 50 управления регистрируется по меньшей мере включенная передача. Далее, при использовании аналогового датчика можно определять движение установленных внутри коробки передач переключающих элементов, так что можно осуществлять ранее обнаружение следующей включенной передачи.
Далее, блок 50 управления может состоять также из двух или более отдельных блоков управления, которые могут быть установлены также в разных корпусах.
Исполнительный механизм 15 питается от аккумулятора 40, причем по меньшей мере один исполнительный механизм 15, 60 имеет постоянное подключение к источнику тока. Далее, устройство располагает многоступенчатым, как правило, выключателем 41 зажигания, который, как правило, приводится в действие ключом зажигания, причем за счет этого через провод 42 включается стартер ДВС 2. По проводу 43 сигнал направляется дальше к электронному блоку исполнительного механизма 15, после чего при включении зажигания исполнительный механизм 15 активизируется. Устройство располагает датчиком или выключателем 44, являющимся, например, выключателем педали тормоза, который также через провод 45 соединен с блоком управления и одновременно через провод 46 включает, например, сигнал 47 торможения. Если при невключенном зажигании, т.е. при разомкнутом выключателе 41, тормоз приводится в действие, то выключатель 44 замыкается и через связь 45 активизируется блок управления исполнительного механизма 15, так что при приведении в действие рычага переключения до включения зажигания может произойти реакция системы передачи крутящего момента и сцепление может быть своевременно выключено.
Изображенный пример выполнения не ограничен только устройством с гидроуправлением; напротив, целесообразны также устройства с чисто механической передачей усилия для выключения системы передачи крутящего момента. Такие устройства приводят в действие рычаг или подшипник выключения сцепления непосредственно или через рычажный механизм или через гибкую связь.
Блок 50 управления автоматическим сцеплением и/или автоматической коробкой передач находится в сигнальной связи с блоком 100а управления электронной системы стабилизации через сигнальную связь 102. Электронная система 100 стабилизации включает в себя при этом противоблокировочную тормозную систему (ABS) с датчиками частоты вращения колес и управляемыми клапанами для целенаправленного дозирования соответствующего тормозного усилия отдельных колес, так что в случае процесса торможения при блокировании, например, одного отдельного колеса тормозное усилие может быть уменьшено за счет целенаправленного управления клапаном в тормозном гидроконтуре колеса, пока состояние блокирования не будет устранено. Электронная система 100 стабилизации включает в себя при этом предпочтительно далее регулирующую систему противоскольжения (ASR), которая при заданной мощности привода автомобильного двигателя посредством целенаправленного вмешательства в процесс торможения препятствует проскальзыванию колеса, если мощность привода доводит колесо до проскальзывания. Для этого контролируют датчики частоты вращения колес и посредством управляемых клапанов для целенаправленного дозирования соответствующего тормозного усилия отдельных колес прикладывают целенаправленное тормозное усилие, так что в случае, например, процесса трогания с места при проскальзывании, например, одного отдельного колеса тормозное усилие может быть увеличено за счет целенаправленного управления клапаном в тормозном гидроконтуре колеса, пока состояние проскальзывания не будет устранено.
Если, например, блок 100 управления электронной системой стабилизации управляет целенаправленным срабатыванием тормоза и/или изменением момента двигателя за счет автоматического изменения положения дроссельной заслонки посредством рычага изменения положения дроссельной заслонки, то блок 100 управления посылает блоку 50 управления характеризующий активность сигнал. При наличии этого сигнала блок 50 управления вырабатывает, в свою очередь, управляющий сигнал, который характеризует активность электронной системы стабилизации.
При наличии этого сигнала блок управления управляет крутящим сигналом, передаваемым системой передачи крутящего момента, или положением включения системы передачи крутящего момента в соответствии с вышеописанными признаками, так что в предпочтительном примере выполнения изобретения сцепление по меньшей мере замедленно включается из актуального положения включения в полностью включенное положение. За счет, например, замедленного срабатывания по сравнению с нормальной скоростью срабатывания не начинается нежелательная реакция, которая противодействует управлению электронной системой стабилизации.
В другом предпочтительном примере выполнения изобретения сцепление остается в актуальном положении включения, поскольку за счет этого не начинается нежелательная реакция, которая противодействует управлению электронной системой стабилизации.
В другом предпочтительном примере выполнения изобретения сцепление по меньшей мере замедленно выключается из актуального положения включения в дальше включенное положение. За счет этого можно эксплуатировать включенное сцепление по меньшей мере частично с проскальзыванием, для того чтобы уменьшилась мощность привода, противодействующая критической дорожной ситуации. Благодаря, например, замедленному срабатыванию по сравнению с нормальной скоростью срабатывания не начинается нежелательная реакция, которая противодействует управлению электронной системой стабилизации.
Электронная система 100 стабилизации содержит помимо датчиков частоты вращения колес, датчиков скорости движения и, при необходимости, датчиков угла наклона колонки рулевого управления, которые определяют поворот управляемых колес, также датчик рыскания, который определяет угол поворота автомобиля вокруг его вертикальной оси. Также могут быть предусмотрены, при необходимости, датчики давления гидравлической жидкости в системе торможения, а также датчик поперечного ускорения для определения поперечного ускорения автомобиля. За счет обработки сигналов датчиков и сравнения актуальной дорожной ситуации с хранящимися в памяти режимами движения можно противодействовать критическому состоянию автомобиля. Такими критическими ситуациями могут быть, например, процессы заноса или опрокидывания автомобиля.
На фиг.2 изображена диаграмма, на которой в качестве функции времени t показан передаваемый момент 201 сцепления и сигнал 202. Сигнал 202 характеризует, активна ли электронная система 100 стабилизации, посылает ли она сигнал ESS Aktiv и рассматривается ли тем самым блоком 50 управления как активная.
Во временном интервале t0-t1 система ESS неактивна и управление передаваемым крутящим моментом 201 сцепления происходит по типу слежения за моментом до значения между значением нуль и максимальным моментом в зависимости от потребности и приложенного момента двигателя. В момент t1управление системой ESS активизируется и передаваемый крутящий момент сцепления повышается в соответствии с кривой 201a до максимального значения, что достигается в момент tмакс.знач.Между tмакс.знач. и t2 система ESS активна и передаваемый крутящий момент сцепления повышается до максимального значения. В момент t2 система ESS дезактивируется и передаваемый крутящий момент 201 сцепления уменьшается до соответствующего рабочей ситуации значения.
В другом примере выполнения в соответствии с кривой 201b передаваемый сцеплением крутящий момент при наличии сигнала ESS Aktiv активности поддерживается постоянным. Точно так же в другом примере выполнения изобретения может быть предпочтительным, если передаваемый сцеплением крутящий момент при ESS Aktiv в соответствии с кривой 201с по меньшей мере частично уменьшается с тем, чтобы, например, сцепление проскальзывало, а мощность привода ограничивалась. В другом примере выполнения изобретения также может быть предпочтительным, если передаваемый сцеплением крутящий момент при ESS_Aktiv в соответствии с кривой 201d уменьшается до нуля.
Скорость, с которой сцепление включается между t1 и tмакс.знач., определяют по максимальному значению между актуальной Vакт. и задаваемой Vзадан. cкоростями. Если vакт. выше Vзадан., то сцепление включено с Vакт. до тех пор, пока Vакт. не будет меньше Vзадан., после чего срабатывание сцепления со скоростью Vзадан. заканчивается.
Кривая 202 показывает сигнал ESS Aktiv, характеризующий активность электронной системы стабилизации. Этот сигнал 202 ESS_Aktiv при отсутствии активности системы ESS равен нулю, а при ее наличии в основном не равен нулю или равен задаваемому значению, например равному единице.
Настоящее изобретение относится далее к более ранней заявке ФРГ №19504847, содержание которой включено в содержание настоящей заявки.
Устройство согласно изобретению обладает тем преимуществом, что возникающее, например, на колесе проскальзывание не возникает на сцеплении или возникает лишь незначительно, и блоки управления системой противоскольжения и срабатыванием сцепления и/или коробки передач существенно не мешают друг другу.
На фиг.3 изображена блок-схема 300 согласно изобретению для управления передаваемым сцеплением крутящим моментом. В блоке 301 способ управления запускается, например, с помощью подпрограммы управляющей программы. Этим запуском можно управлять посредством события, например сигнала, вырабатываемого блоком управления, например, при сравнении частот вращения колес, когда колеса имеют задаваемое проскальзывание и задаваемую разность частот вращения. Способ может вызываться также повторно в такт времени главной программы. Это может происходить, например, каждые 10-100 мс.
В блоке 302 с помощью по меньшей мере отдельных параметров автомобиля, а именно частоты вращения двигателя, момента двигателя, частоты вращения на входе коробки передач, частоты вращения на выходе коробки передач, скорости автомобиля, положения педали акселератора, передаточного числа коробки передач, приведения в действие системы торможения, частот вращения колес, угла наклона колонки рулевого управления, угла рыскания и т.д., можно определить актуальную рабочую ситуацию автомобиля. По этим параметрам или сигналам, которые регистрируются датчиками или определяются другими электронными блоками и передаются к блоку управления, в блоке 303 определяют передаваемый сцеплением крутящий момент.
В блоке 304 этот передаваемый сцеплением крутящий момент устанавливают или регулируют посредством управляющего сигнала от исполнительного механизма.
При регистрации посланного электронной системой стабилизации (ESS) сигнала, характеризующего активность или неактивность этой системы, в блоке 306 этот сигнал обрабатывают и запрашивают, активна ли электронная система стабилизации. Если это не так, то в блоке 304 продолжают отработку программы. Точно так же в блоке 302 или 303 продолжают дальше отработку программы. При наличии активности в блоке 308 передаваемый сцеплением крутящий момент повышают до максимального значения со скоростью, являющейся по меньшей мере нормальной скоростью срабатывания. Точно так же можно выбрать максимальную скорость срабатывания.
В блоке 309 запрашивают, продолжается ли критическая ситуация с автомобилем и/или система ESS все еще активна. Если это так, то в блоке 308 продолжают отработку программы и сцепление дальше включают или поддерживают включенным, в противном случае в блоке 302 продолжают отработку программы и управляют нормальным в актуальной рабочей ситуации, передаваемым сцеплением крутящим моментом. Если, например, у способа управления со слежением за моментом в рабочей ситуации это тот случай, когда имеется только часть максимально передаваемого крутящего момента в качестве момента двигателя, то сцепление можно снова частично выключить, так что методом слежения за моментом устанавливают только передаваемый сцеплением крутящий момент, такой как момент сцепления, который лежит в поле допусков вокруг актуального момента двигателя.
Поданная вместе с заявкой формула изобретения является предложением по ее редакции без ущерба для достижения дальнейшей патентной охраны. Заявитель оставляет за собой право заявить дополнительные признаки, раскрытые пока только в описании и/или на чертежах.
Использованная в зависимых пунктах подчиненность указывает на дальнейшее усовершенствование объекта основного пункта посредством признаков соответствующего зависимого пункта; их не следует рассматривать как отказ от достижения самостоятельной предметной охраны признаков подчиненных зависимых пунктов.
Объекты этих зависимых пунктов образуют, однако, также самостоятельные изобретения, имеющие независимую от объектов предыдущих зависимых пунктов форму.
Изобретение не ограничено также приведенным (приведенными) в описании примером (примерами) его осуществления. Напротив, в рамках изобретения возможны многочисленные разновидности и модификации, в частности такие варианты, элементы и комбинации и/или материалы, которые, например, обладают изобретательским уровнем за счет комбинации или видоизменения отдельных признаков или элементов или технологических операций, описанных в сочетании с теми, что приведены в общем описании и формах выполнения, а также пунктах формулы и изображенных на чертежах, и за счет комбинируемых признаков приводят к новому объекту, или новым технологическим операциям, или последовательностям технологических операций также касательно способов изготовления, контроля и технологических процессов.
Реферат
Изобретение относится к области транспортного машиностроения и предназначено для повышения стабилизации автомобиля. Автомобиль содержит устройство для автоматического приведения в действие сцепления и электронную систему стабилизации. При автоматическом срабатывании сцепления и наличии сигнала, характеризующего активность блока управления электронной системы стабилизации автомобиля, передаваемым сцеплением крутящим моментом, управляют с актуально отрегулированного значения до максимального значения, или до минимального значения, или оставляют это значение неизменным. Техническим результатом является повышение безопасности пассажиров, а также уменьшение или предотвращение взаимных нарушений соответствующих процессов регулирования или управления автомобиля. 6 с. и 10 з.п. ф-лы, 3 ил.

Комментарии