Автономный подвижный корпус, программа управления автономным подвижным корпусом, способ управления автономным подвижным корпусом и системный сервер для управления автономным подвижным корпусом из дистанционной области - RU2745543C1
Код документа: RU2745543C1
Чертежи






Описание
УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к автономному подвижному корпусу, программе управления автономным подвижным корпусом, способу управления автономным подвижным корпусом и системному серверу для управления автономным подвижным корпусом из дистанционной области.
В настоящее время известны транспортные роботы, которые могут самостоятельно перемещаться между этажами с помощью лифта, установленного в здании (см., например, патент США № 9026301).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В том случае, когда автономный подвижный корпус перемещается на этаж назначения, используя лифт, который также могут использовать люди, осуществляя вход и выход, автономный подвижный корпус может испытывать затруднения в том, чтобы плавно выйти из кабины лифта за короткий промежуток времени, в зависимости от позиции ожидания автономного подвижного корпуса, когда кабина лифта прибывает на этаж назначения. В то же время нежелательно, чтобы автономный подвижный корпус совершал действия в узкой кабине лифта, когда кабина лифта движется вверх или вниз.
Настоящее изобретение предназначено для того, чтобы решить вышеупомянутую проблему и обеспечить для автономного подвижного корпуса и тому подобных устройств возможность плавного выхода из кабины лифта в течение короткого периода времени.
Автономный подвижный корпус, согласно первому аспекту настоящего изобретения, представляет собой автономный подвижный корпус, выполненный с возможностью перемещения в автономном режиме между этажами с использованием лифта, установленного в сооружении, причем автономный подвижный корпус содержит: блок определения, выполненный с возможностью определения того, что автономный подвижный корпус прибыл в зону ожидания на текущем этаже перед тем, как автономный подвижный корпус входит в кабину лифта; блок установки ориентации, выполненный с возможностью устанавливать, когда блок определения положения обнаруживает, что автономный подвижный корпус прибыл в зону ожидания, ориентацию автономного подвижного корпуса на основе направления выхода из кабины лифта на этаже назначения; и контроллер движения, выполненный с возможностью инициировать, когда кабина лифта прибывает, вход автономного подвижного корпуса в кабину лифта, сохраняя при этом ориентацию, установленную блоком установки ориентации. Такая конструкция автономного подвижного корпуса позволяет установить его ориентацию в соответствии с направлением выхода на этаже назначения, в результате чего автономный подвижный корпус может плавно выйти из кабины лифта в течение короткого периода времени после того, как кабина лифта прибывает на этаж назначения.
В вышеупомянутом автономном подвижном корпусе блок установки ориентации может инициировать поворот автономного подвижного корпуса с тем, чтобы удовлетворять по меньшей мере одному из критериев того, что направление выхода соответствует передней стороне автономного подвижного корпуса, он поворачивается в зависимости от размещения датчика окружающего пространства, предусмотренного в автономном подвижном корпусе, он поворачивается в зависимости от размещения дисплейного пульта, предусмотренного в автономном подвижном корпусе, и он поворачивается в зависимости от формы корпуса автономного подвижного корпуса, что позволяет устанавливать ориентацию автономного подвижного корпуса. За счет установки ориентации в соответствии с вышеупомянутым критерием, автономный подвижный корпус может выходить из кабины лифта более плавно.
Кроме того, в вышеупомянутом автономном подвижном корпусе контроллер движения может устанавливать, после того, как автономный подвижный корпус входит в кабину лифта, положение, при котором задняя часть автономного подвижного корпуса является противоположной относительно поверхности стенки кабины лифта, в качестве пункта назначения, и инициировать движение автономного подвижного корпуса. Когда автономный подвижный корпус ожидает, будучи ориентированным задней частью напротив поверхности стенки, маловероятно, что автономный подвижный корпус будет беспокоить людей, которые входят в кабину лифта и выходят из кабины лифта.
Кроме того, когда кабина лифта представляет собой асимметричное пространство, когда кабина лифта видна из двери, контроллер движения может устанавливать, после того, как автономный подвижный корпус входит в кабину лифта, сторону кабины лифта, на которой имеется широкое пространство, когда кабина лифта видна из двери, в качестве пункта назначения, и инициировать движение автономного подвижного корпуса. Если автономный подвижный корпус ожидает в большом пространстве, можно уменьшить ощущение стесненности, которое могут испытывать люди, едущие на лифте вместе с автономным подвижным корпусом.
Кроме того, контроллер движения может устанавливать, после того как автономный подвижный корпус входит в кабину лифта, положение, при котором камера, предусмотренная в автономном подвижном корпусе для получения информации об окружающем пространстве, может захватывать изображения с более широким диапазоном, чем заранее заданный эталонный диапазон, в качестве пункта назначения, и инициировать движение автономного подвижного корпуса. В тех случаях, когда можно получать изображения в более широком диапазоне, можно надлежащим образом получить данные о ситуации в кабине лифта, в результате чего автономный подвижный корпус может выполнить соответствующее действие для выхода.
Блок установки ориентации может не устанавливать ориентацию автономного подвижного корпуса, если препятствие обнаружено в заранее заданном диапазоне относительно внешней рамы автономного подвижного корпуса. Согласно этой конфигурации, отсутствует возможность для того, чтобы люди, ожидающие прибытия кабины лифта вместе с автономным подвижным корпусом, контактировали с автономным подвижным корпусом.
Управляющая программа для автономного подвижного корпуса согласно второму аспекту настоящего изобретения представляет собой управляющую программу для автономного подвижного корпуса, выполненную с возможностью обеспечения его перемещения в автономном режиме между этажами с использованием лифта, установленного в сооружении, причем управляющая программа инициирует выполнение компьютером следующих этапов: этап определения для определения того, что автономный подвижный корпус прибыл в зону ожидания на текущем этаже перед тем, как автономный подвижный корпус входит в кабину лифта; этап установки ориентации для установки, когда на этапе определения определено, что автономный подвижный корпус прибыл в зону ожидания, ориентации автономного подвижного корпуса в зависимости от направления выхода из кабины лифта на этаже назначения; и этап входа для входа в кабину лифта, когда прибывает кабина лифта, при этом сохраняя ориентацию, установленную на этапе установки ориентации.
Способ управления автономным подвижным корпусом согласно третьему аспекту настоящего изобретения представляет собой способ управления автономным подвижным корпусом, который перемещается в автономном режиме между этажами с использованием лифта, установленного в сооружении, причем способ содержит следующие этапы: этап определения для определения того, что автономный подвижный корпус прибыл в зону ожидания на текущем этаже перед тем, как автономный подвижный корпус входит в кабину лифта; этап установки ориентации для установки, когда на этапе определения определено, что автономный подвижный корпус прибыл в зону ожидания, ориентации автономного подвижного корпуса в зависимости от направлении выхода из кабины лифта на этаже назначения; и этап входа для входа в кабину лифта, когда прибывает кабина лифта, при этом сохраняя ориентацию, установленную на этапе установки ориентации.
Системный сервер согласно четвертому аспекту настоящего изобретения представляет собой системный сервер для управления автономным подвижным корпусом, который перемещается в автономном режиме между этажами с использованием лифта, установленного в сооружении, из дистанционной области, причем системный сервер содержит: блок определения, выполненный с возможностью определения, что автономный подвижный корпус прибыл в зону ожидания на текущем этаже перед тем как автономный подвижный корпус входит в кабину лифта, на основе информации от датчиков окружающего пространства автономного подвижного корпуса, полученной от автономного подвижного корпуса; блок команд установки, выполненный с возможностью передачи в автономный подвижный корпус, когда блок определения определяет, что автономный подвижный корпус прибыл в зону ожидания, команды установки для установки ориентации автономного подвижного корпуса в зависимости от направления выхода из кабины лифта на этаже назначения; и блок команд перемещения, выполненный с возможностью передачи, когда прибывает кабина лифта, команды перемещения для инициирования входа автономного подвижного корпуса в кабину лифта, сохраняя при этом ориентацию, установленную командой от блока команд установки автономному подвижному корпусу. Согласно второму, третьему и четвертому аспектам также можно осуществить плавный выход из кабины лифта автономного подвижного корпуса, являющегося объектом управления.
Согласно настоящему изобретению возможно создание автономного подвижного корпуса или подобного устройства, способного плавно выходить из кабины лифта в течение короткого периода времени.
Вышеупомянутые и другие задачи, признаки и преимущества настоящего изобретения более подробно раскрыты в подробном описании, представленном ниже и на сопроводительных чертежах, носящих исключительно иллюстративный, а не ограничительный характер.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 содержит внешний вид в аксонометрии мобильного робота согласно одному варианту осуществления изобретения;
Фиг. 2 содержит блок-схему управления мобильного робота;
Фиг. 3 содержит схему, иллюстрирующую состояние, при котором мобильный робот движется в зону ожидания лифта;
Фиг. 4 содержит схему, иллюстрирующую состояние, при котором мобильный робот прибыл в зону ожидания лифта;
Фиг. 5 содержит схему, иллюстрирующую состояние, при котором мобильный робот совершает поворот;
Фиг. 6 содержит схему, иллюстрирующую состояние, при котором мобильный робот выполнил установку его ориентации;
Фиг. 7 содержит схему, иллюстрирующую состояние, при котором мобильный робот входит в кабину лифта;
Фиг. 8 содержит схему для пояснения первого положения ожидания в кабине лифта;
Фиг. 9 содержит схему для пояснения второго положения ожидания в кабине лифта;
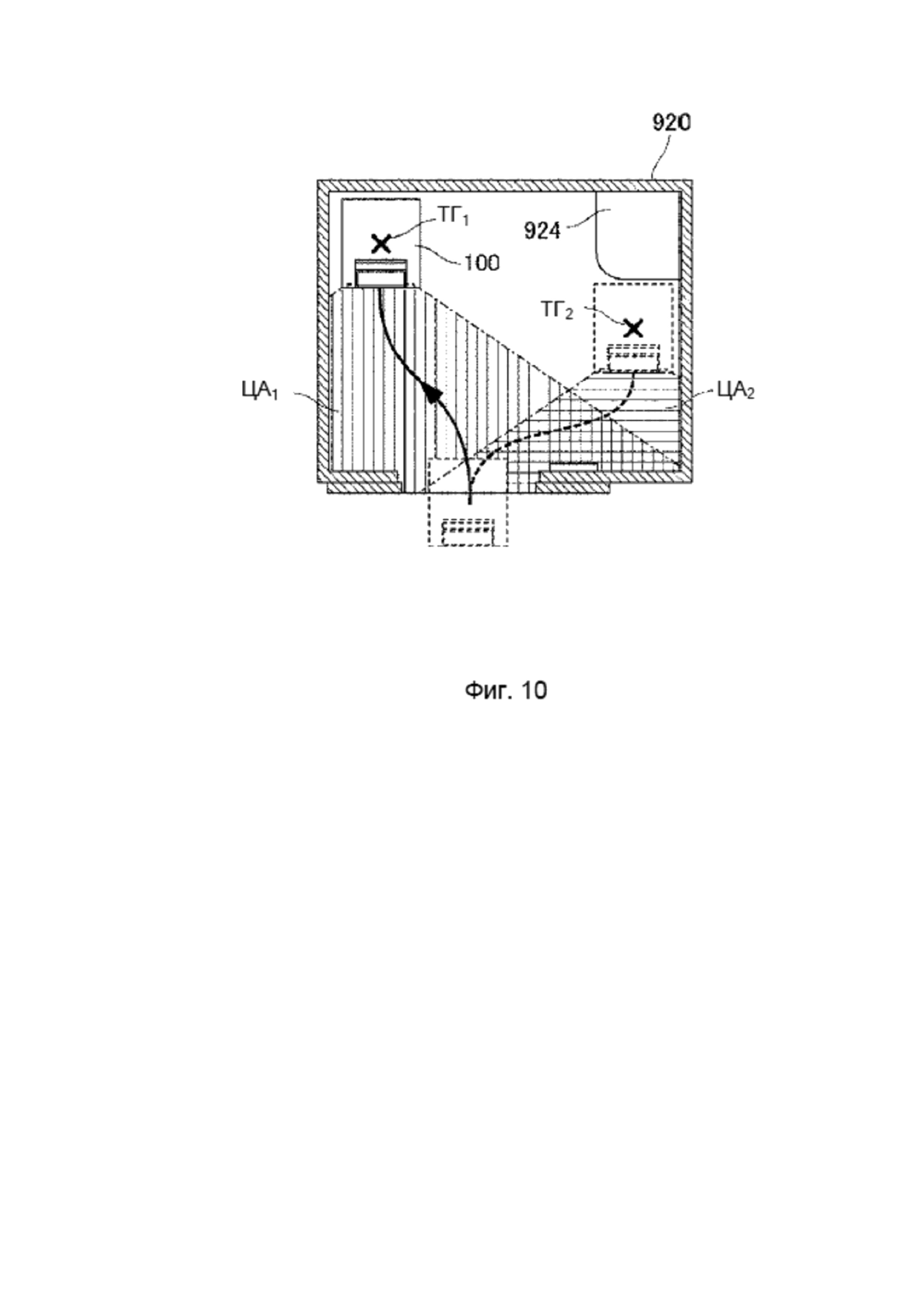
Фиг. 10 содержит схему для пояснения третьего положения ожидания в кабине лифта;
Фиг. 11 содержит блок-схему, иллюстрирующую последовательность операций при движении мобильного робота; и
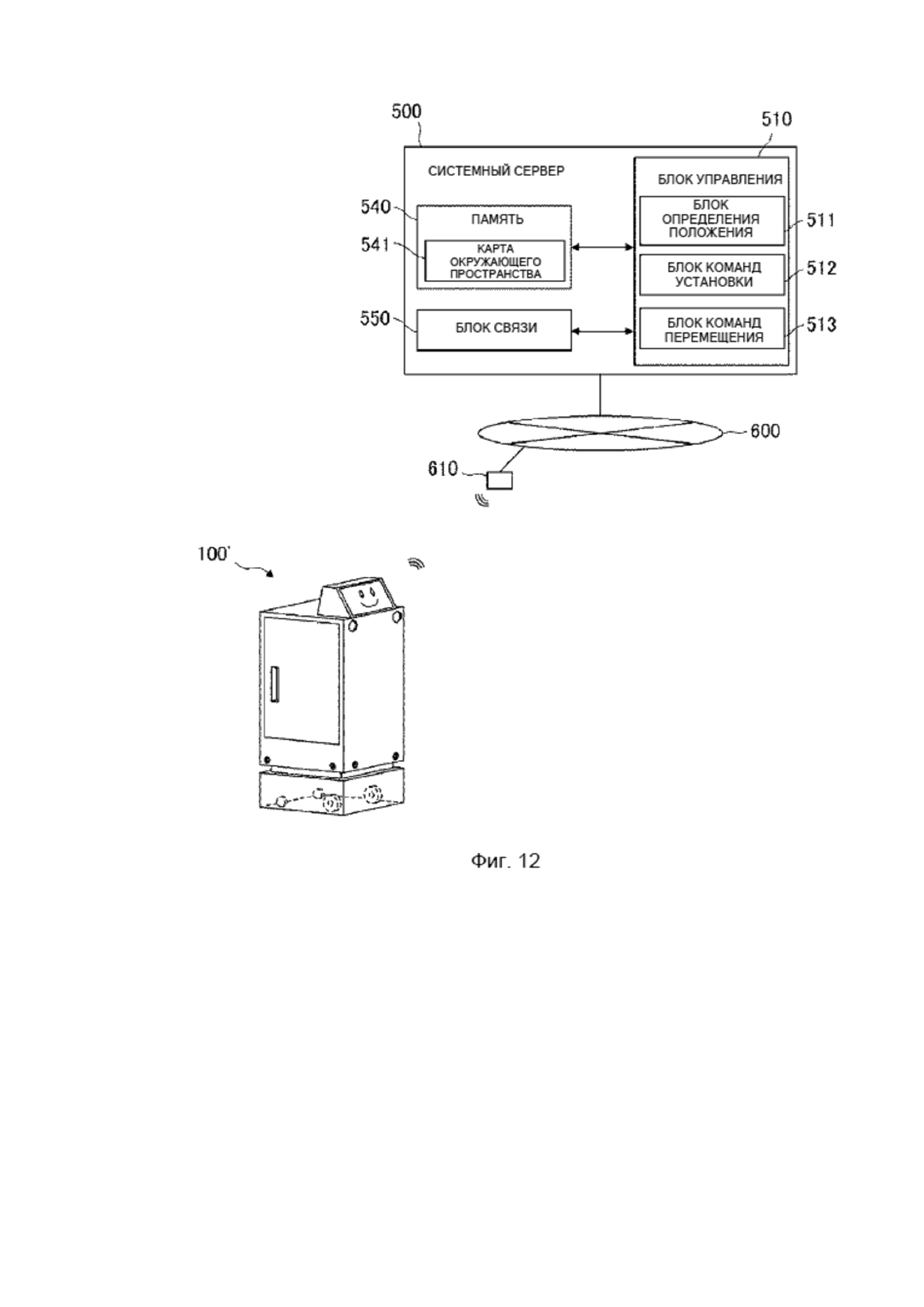
Фиг. 12 содержит схему, иллюстрирующую другие варианты осуществления изобретения.
РАСКРЫТИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
В дальнейшем настоящее изобретение будет объяснено посредством вариантов осуществления изобретения. Тем не менее, они не предназначены для ограничения объема настоящего изобретения, определяемого формулой настоящего изобретения. Кроме того, все компоненты и/или структуры, раскрытые в этих вариантах осуществления, не обязательно являются необходимыми в качестве средства для решения проблемы.
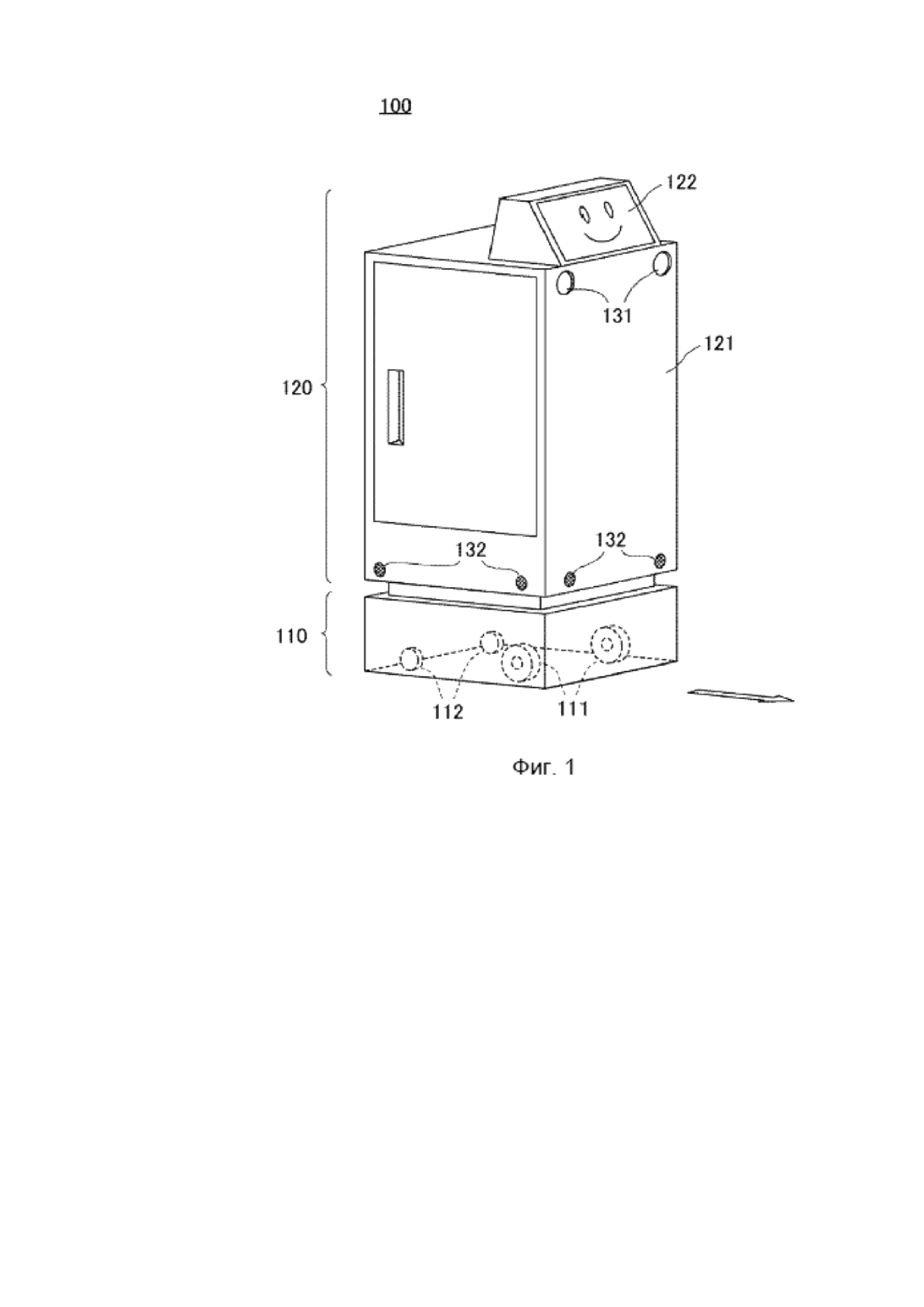
Фиг. 1 содержит внешний вид в аксонометрии мобильного робота 100 согласно одному варианту осуществления изобретения. Мобильный робот 100 представляет собой один из примеров автономного подвижного корпуса, способного к перемещению в автономном режиме. Мобильный робот 100 способен перемещаться в автономном режиме между этажами с использованием лифта, установленного в сооружении. Мобильный робот 100, по существу, состоит из движительной части 110 и основной корпусной части 120.
Опорой движительной части 110 служат два приводных колеса 111 и два ролика 112, каждые из которых находится на уровне поверхности, по которой осуществляется движение, внутри крышки, имеющей прямоугольную форму. Два приводных колеса 111 размещены таким образом, что их оси вращения совмещены друг с другом. Приводные колеса 111 приводятся во вращательное движение независимо друг от друга посредством двигателя (не показан). Ролики 112, которые являются ведомыми колесами, размещены таким образом, что ось поворота, проходящая в вертикальном направлении от движительной части 110, поддерживает колеса так, чтобы между нею и осями вращения колес было небольшое пространство, и следуют по траектории в зависимости от направления движения движительной части 110.
Мобильный робот 100 двигается прямо вперед, когда, например, два приводных колеса 111 вращаются с одинаковой скоростью вращения в одном и том же направлении, и указанный робот может поворачиваться вокруг вертикальной оси, которая проходит, по существу, через центральную часть двух приводных колес 111 движительной части 110, когда два приводных колеса 111 вращаются с одинаковой скоростью вращения в противоположных направлениях. Таким образом, поскольку направление вращения и скорость вращения двух приводных колес 111 могут изменяться за счет управления, мобильный робот 100 может двигаться поступательно или поворачиваться в нужном направлении.
Основная корпусная часть 120, по существу, содержит вмещающую часть 121, установленную над движительной частью 110, и дисплейный пульт 122, установленный в области верхней поверхности вмещающей части 121. Вмещающая часть 121 выполнена в форме прямоугольного параллелепипеда и содержит полку для размещения перемещаемых объектов и блок управления для размещения контроллера и тому подобного, что будет раскрыто ниже. Дисплейный пульт 122 представляет собой, например, жидкокристаллическую панель и отображает лицо персонажа в качестве иллюстрации, или представляет информацию о мобильном роботе 100 в виде текста или значка. Если дисплейный пульт 122 отображает лицо персонажа, для окружающих наблюдателей создается впечатление, что дисплейный пульт 122 является частью игрушечного лица. Кроме того, дисплейный пульт 122 содержит сенсорную панель на поверхности дисплея и может принимать входные команды от пользователя.
Стереокамера 131 установлена в верхней части вмещающей части 121, но находится ниже поверхности дисплея дисплейного пульта 122. Стереокамера 131 имеет конфигурацию, в которой два блока камеры, имеющие один и тот же угол обзора, размещены таким образом, что они отделены друг от друга в горизонтальном направлении, и выводит изображения, полученные соответствующими блоками камеры, в качестве данных изображения. На каждой из поверхностей корпуса, в нижней части вмещающей части 121, предусмотрены ультразвуковые датчики 132, которые направлены в горизонтальном направлении. Мобильный робот 100 анализирует данные изображения, выводимые стереокамерой 131, и сигналы обнаружения, выводимые ультразвуковыми датчиками 132, распознавая тем самым окружающее препятствие и свое собственное местоположение.
Как показано на фиг. 1, мобильный робот 100 задает сторону, на которой установлена стереокамера 131, в качестве его передней стороны. Таким образом, при нормальном движении, которое показано стрелкой, передняя сторона мобильного робота 100 соответствует направлению движения.
Для определения передней стороны мобильного робота 100 могут быть использованы различные принципы. Например, можно определить переднюю сторону на основе того, как размещен датчик окружающего пространства для распознавания того, что находится в окружающем пространстве. В частности, сторона внешней поверхности корпуса, на которой расположены датчики, обладающие высокой способностью распознавания, или предусмотрено несколько датчиков, может быть задана в качестве передней стороны. Определяя таким образом переднюю сторону, мобильный робот может перемещаться, одновременно соответствующим образом распознавая то, что находится в пространстве, окружающем мобильного робота. Согласно этому варианту осуществления изобретения, в мобильном роботе 100 сторона внешней поверхности корпуса, на которой размещена стереокамера 131, также предусмотрена в качестве передней стороны.
В качестве альтернативы можно определить переднюю сторону на основе того, где размещен дисплейный пульт. Если на дисплейном пульте отображается лицо персонажа или что-либо подобное, люди, окружающие мобильного робота, естественно, понимают, что поверхность дисплейного пульта соответствует передней стороне мобильного робота. Поэтому, если сторона поверхности дисплея дисплейного пульта задана в качестве передней стороны, люди, окружающие мобильного робота, не испытывают сильного чувства отчужденности. Мобильный робот 100 согласно этому варианту осуществления изобретения также задает сторону поверхности дисплея дисплейного пульта 122, в качестве передней стороны.
Кроме того, передняя сторона может быть определена на основе формы корпуса мобильного робота 100. Например, если форма корпуса, проецируемая на поверхность перемещения, представляет собой прямоугольник, в качестве передней стороны предпочтительно выбрать более короткую сторону, а не более длинную сторону, чтобы присутствие мобильного робота 100 не мешало людям, которые находятся рядом с мобильным роботом 100, когда он движется. Таким образом, в зависимости от формы корпуса, может быть выбрана поверхность корпуса, которая предпочтительно должна быть задана в качестве передней стороны, когда мобильный робот 100 перемещается в обычном режиме. В мобильном роботе 100 согласно этому варианту осуществления изобретения также более короткая сторона прямоугольника задана в качестве передней стороны. С учетом того, что мобильный робот 100 определяет переднюю сторону в соответствии с некоторыми принципами, раскрытыми выше, в зависимости от того, какой из принципов должен быть использован, передняя сторона может быть определена на основе формы, роли и тому подобных характеристик, относящихся к мобильному роботу.
Фиг. 2 содержит блок-схему управления мобильного робота 100. Контроллер 200, который представляет собой, например, ЦПУ, выполняет управляющую программу, загруженную из памяти 240, тем самым выполняя управление всем устройством. Блок 210 управления движителем содержит цепь привода или мотор для приведения в движение приводных колес 111. Контроллер 220 дисплея генерирует видеоизображение дисплея в соответствии с управляющим сигналом от контроллера 200 и отображает сгенерированное видеоизображение дисплея на дисплейном пульте 122. Кроме того, контроллер 220 дисплея принимает команды на сенсорной панели, совмещенной с дисплейным пультом 122, генерирует командный сигнал и передает сгенерированный командный сигнал в контроллер 200.
Блок 230 датчиков содержит различные датчики для обнаружения людей или объектов, которые присутствуют вокруг мобильного робота 100, и отслеживания объекта, информация о котором подлежит передаче. Стереокамера 131 и ультразвуковые датчики 132 представляют собой элементы, составляющие блок 230 датчиков. Контроллер 200 отправляет управляющий сигнал в блок 230 датчиков, тем самым приводя в действие различные датчики и получая выходной сигнал и выходные данные датчиков.
Память 240, которая является энергонезависимым носителем данных, может представлять собой, например, твердотельный накопитель данных. Память 240 хранит, помимо управляющей программы для мобильного робота 100, различные значения параметров, функции, справочные таблицы и т.д., которые должны использоваться для управления. В частности, память 240 хранит карту 241 окружающего пространства, в которой содержится информация, относящаяся к карте сооружения, в котором мобильный робот 100 перемещается в автономном режиме.
Блок 250 связи представляет собой, например, блок беспроводной локальной сети, и контроллер 200 передает различные виды информации на системный сервер и принимает от внешнего системного сервера через блок 250 связи и сеть. Контроллер 200 передает, например, сигнал вызова на системный сервер, когда требуется инициировать подъем кабины лифта на текущий этаж. Системный сервер направляет этот сигнал вызова на контроллер лифта. Кроме того, контроллер 200 получает наиболее актуальную карту 241 окружающего пространства, отправленную с системного сервера, и сохраняет полученную карту в памяти 240.
Контроллер 200 также служит функциональным блоком управления для выполнения различных операций, касающихся управления и обработки. Блок 201 определения положения, блок 202 установки ориентации и контроллер 203 движения представляют собой примеры функциональных блоков управления. Блок 201 определения положения определяет текущее местоположение мобильного робота 100 посредством сравнения информации из блока 230 датчиков с картой 241 окружающего пространства. Блок 202 установки ориентации посылает управляющий сигнал в блок 210 управления движителем и управляет вращением приводных колес 111 таким образом, чтобы ориентация мобильного робота 100 совпадала с установленной ориентацией. Контроллер 203 движения отправляет управляющий сигнал в блок 210 управления движителем и управляет вращением приводных колес 111 таким образом, что мобильный робот 100 перемещается к заданному пункту назначения. Конкретные функции функционального блока управления будут объяснены далее.
Когда мобильный робот перемещается на этаж назначения с использованием лифта, в который также люди входят и выходят из него, то, если мобильный робот подходит к передней части кабины лифта и входит в кабину лифта, двигаясь вперед, не меняя своей ориентации, то мобильному роботу необходимо выйти из кабины лифта задним ходом, после того, как кабина лифта прибудет на этаж назначения. В этом случае может быть затруднительно для мобильного робота выйти за короткий промежуток времени, что обусловлено различными факторами. Например, состояние этажа назначения для мобильного робота неизвестно до тех пор, пока не откроется дверь кабины лифта. В этом случае, если не предусмотрено достаточное количество датчиков окружающего пространства в задней части мобильного робота 100, требуется время, чтобы получить достаточное количество информации об окружающем пространстве, чтобы позволить мобильному роботу начать движение. Кроме того, если дисплейный пульт не ориентирован в направлении двери кабины лифта, людям, которые собираются войти в кабину лифта с этажа назначения, не может быть представлена информация, и возможно, что необходимая для движения коммуникация не сможет быть осуществлена. С другой стороны, нежелательно регулировать ориентацию мобильного робота 100 внутри кабины лифта до того, как мобильный робот 100 выйдет из кабины лифта на этаже назначения, то есть, после того, как мобильный робот войдет в кабину лифта, поскольку в этом случае мобильный робот 100 может соприкасаться с другими пассажирами. Для того, чтобы решить эти проблемы, мобильный робот 100 в соответствии с этим вариантом осуществления изобретения устанавливает свою ориентацию на основе направления выхода из кабины лифта на этаже назначения до того, как мобильный робот 100 войдет в кабину лифта. Эта процедура обработки в данном случае и состояние мобильного робота 100 будут раскрыты со ссылкой на чертежи.
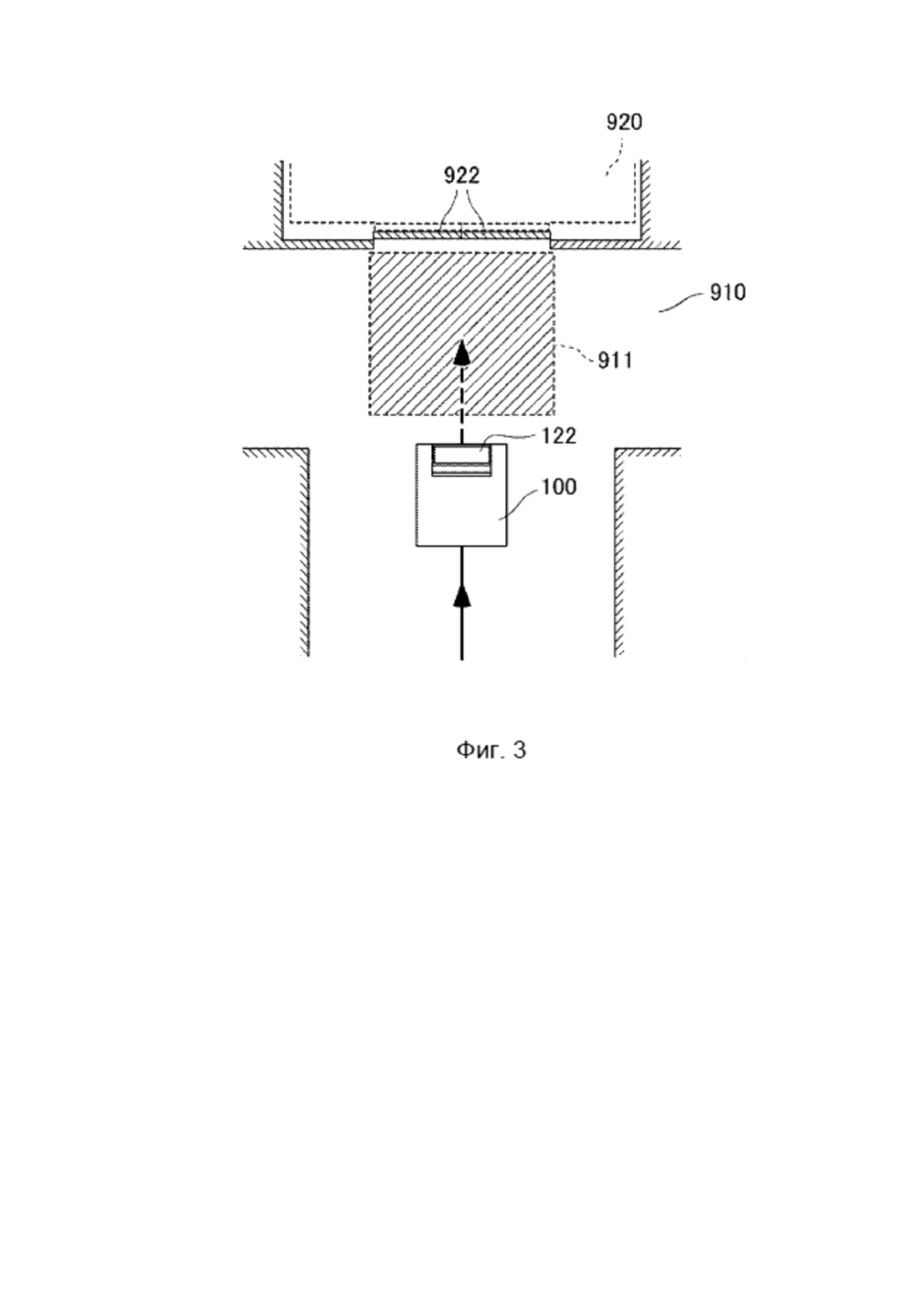
Фиг. 3 представляет собой схему, иллюстрирующую состояние, при котором мобильный робот 100 движется в зону 911 ожидания лифта. Каждый из этажей в сооружении, предполагаемом для перемещения мобильного робота, содержит проход 910, по которому может перемещаться мобильный робот 100, и расположение прохода 910 указано на карте 241 окружающего пространства. Мобильный робот 100 движется в соответствии с планом движения, который составляется, когда начинается движение. Маршрут движения планируется в соответствии с выбором прохода 910 и в зависимости от того, используется лифт или нет. Лифт используется, когда, например, этаж, соответствующий начальной точке маршрута, отличается от этажа для точки назначения.
Каждый из этажей оснащен наружной дверью 922 лифта, которая закрыта, когда кабина 920 лифта не находится на данном этаже. Зона 911 ожидания установлена в области перед наружной дверью 922 в проходе 910. Зона 911 ожидания также указана на карте 241 окружающего пространства. Маршрут движения, который составлен мобильным роботом 100, определяется для каждого этажа, когда мобильный робот 100 использует лифт, а в качестве точки назначения или начальной точки на каждом этаже устанавливается зона 911 ожидания на соответствующем этаже, посредством чего маршруты между этажами связаны друг с другом.
На фиг. 3, например, мобильный робот 100, который двигался по проходу 910, как показано сплошной стрелкой, движется к зоне 911 ожидания для использования лифта, как показано пунктирной стрелкой. Блок 201 определения положения периодически определяет, прибыл ли мобильный робот 100 в зону 911 ожидания. Если определено, что мобильный робот 100 еще не прибыл, контроллер 203 движения инициирует движение мобильного робота 100 вперед в направлении зоны 911 ожидания. Зона 911 ожидания может быть заранее задана на карте 241 окружающего пространства. В качестве альтернативы, зона 911 ожидания может быть задана мобильным роботом 100 в соответствии с состоянием этажа на месте. Когда, например, наружная дверь 922 обнаружена, область вблизи наружной двери 922 и где отсутствуют окружающие конструкции и люди, может быть задана как зона 911 ожидания.
Фиг. 4 содержит схему, иллюстрирующую состояние, при котором мобильный робот 100 прибывает в зону 911 ожидания лифта. Когда блок 201 определения положения обнаруживает, что мобильный робот 100 прибыл в зону 911 ожидания, контроллер 203 движения завершает передачу управляющего сигнала, отправляемого в блок 210 управления движителем, чтобы остановить мобильный робот 100. Затем блок 202 установки ориентации проверяет направление выхода из кабины 920 лифта на этаже назначения, сверяясь с картой 241 окружающего пространства.
Поскольку типовые лифты имеют только одну внутреннюю дверь, предусмотренную в кабине лифта, направление входа и направление выхода всегда противоположны друг другу. В том случае, если лифт имеет вышеупомянутую конфигурацию, направление выхода на каждом этаже может не быть конкретно указано на карте 241 окружающего пространства, и блок 202 установки ориентации может выполнить установку ориентации робота в предположении, что направление выхода противоположно направлению входа. С другой стороны, когда, например, внутренние двери в кабине лифта предусмотрены в двух местах, противоположных друг другу, и открывающаяся дверь изменяется в зависимости от этажа, карта 241 окружающего пространства описывает направление выхода для каждого этажа. В этом случае блок 202 установки ориентации проверяет направление выхода, сверяясь с картой 241 окружающего пространства, и устанавливает ориентацию мобильного робота 100 в соответствии с результатами проверки.
Когда направление выхода противоположно направлению входа, блок 202 установки ориентации инициирует поворот таким образом, чтобы развернуть ориентацию мобильного робота 100 на противоположную. Фиг. 5 содержит схему, иллюстрирующую состояние, при котором мобильный робот 100 совершает поворот. Тем не менее, если препятствие было обнаружено в заданном диапазоне (например, на расстоянии 2 м) от внешней рамы мобильного робота 100, то блок 202 установки ориентации не выполняет установку ориентации. Согласно этой конфигурации, блок 202 установки ориентации может препятствовать взаимодействию мобильного робота 100 с людьми, ожидающими прибытия кабины 920 лифта.
Фиг. 6 представляет собой схему, иллюстрирующую состояние, при котором мобильный робот 100 выполнил установку своей ориентации. То есть, на фиг. 6 показано состояние, при котором передняя сторона мобильного робота 100 направлена в направлении выхода из кабины лифта на этаже назначения. Другими словами, фиг. 6 показывает состояние, при котором задняя сторона мобильного робота 100 направлена в сторону наружной двери 922. Мобильный робот 100 остается в этом состоянии и ждет прибытия кабины 920 лифта.
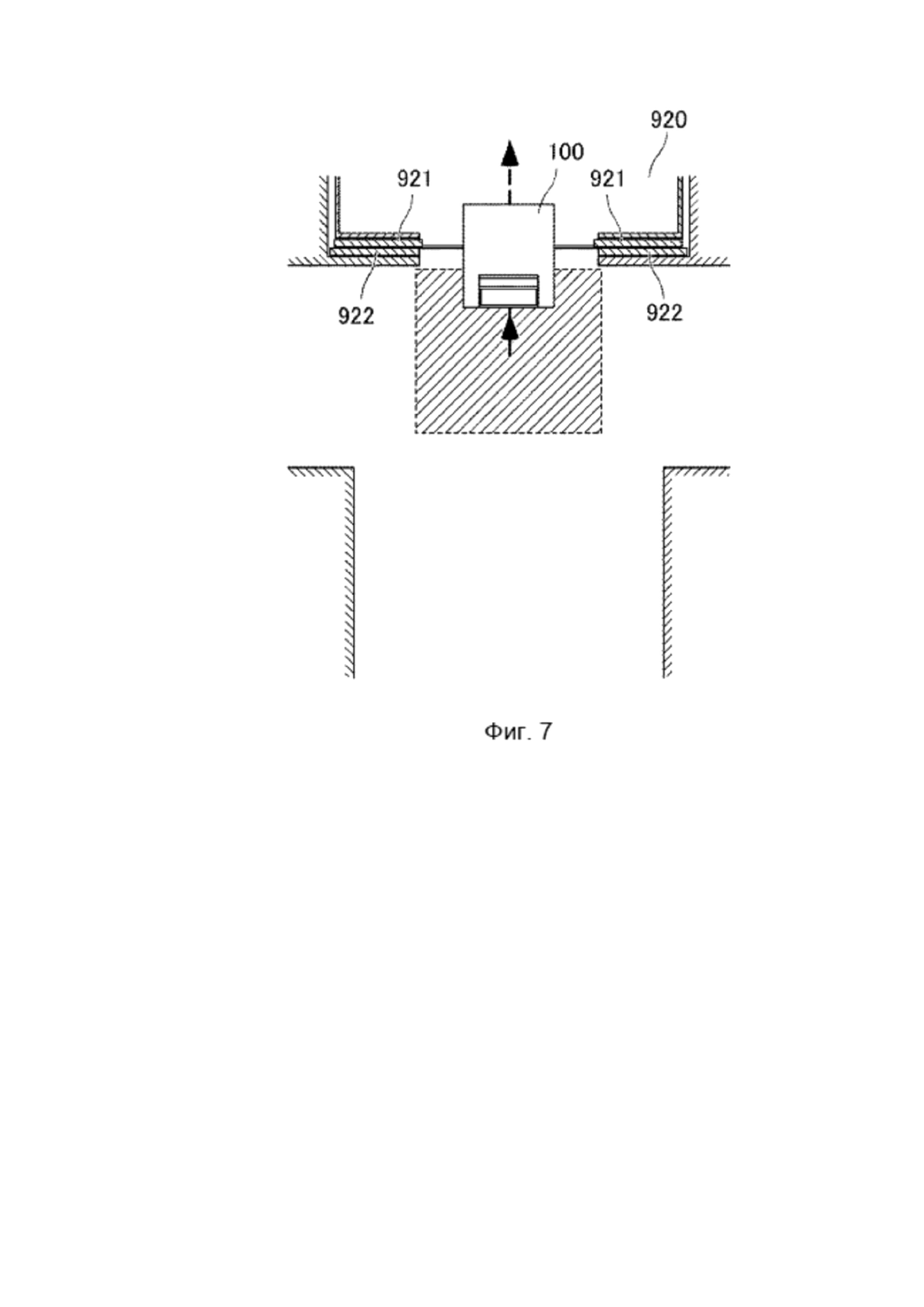
Фиг. 7 представляет собой схему, иллюстрирующую состояние, при котором мобильный робот 100 входит в кабину 920 лифта. Когда подтверждено, что кабина 920 лифта прибыла на текущий этаж, и внутренняя дверь 921 и наружная дверь 922 были открыты, контроллер 203 движения передает управляющий сигнал в блок 210 управления движителем, чтобы обеспечить вход мобильного робота 100 в кабину 920 лифта при сохранении ориентации, установленной посредством поворота. Таким образом, когда мобильный робот 100 входит в кабину 920 лифта после того, как выполнена установка ориентации мобильного робота 100 в соответствии с направлением выхода, можно избежать неудобств, которые могли возникнуть, если бы мобильный робот 100 выходил задним ходом, и, таким образом, мобильный робот 100 способен плавно выйти из кабины 920 лифта в течение короткого промежутка времени.
Далее будут приведены некоторые примеры положения ожидания мобильного робота 100, когда кабина 920 лифта движется вверх и вниз. После того, как мобильный робот 100 входит в кабину 920 лифта, как раскрыто выше, мобильный робот перемещается в одно из положений ожидания, по которому будет дано разъяснение ниже, и ожидает прибытия кабины 920 лифта на этаж назначения на месте.
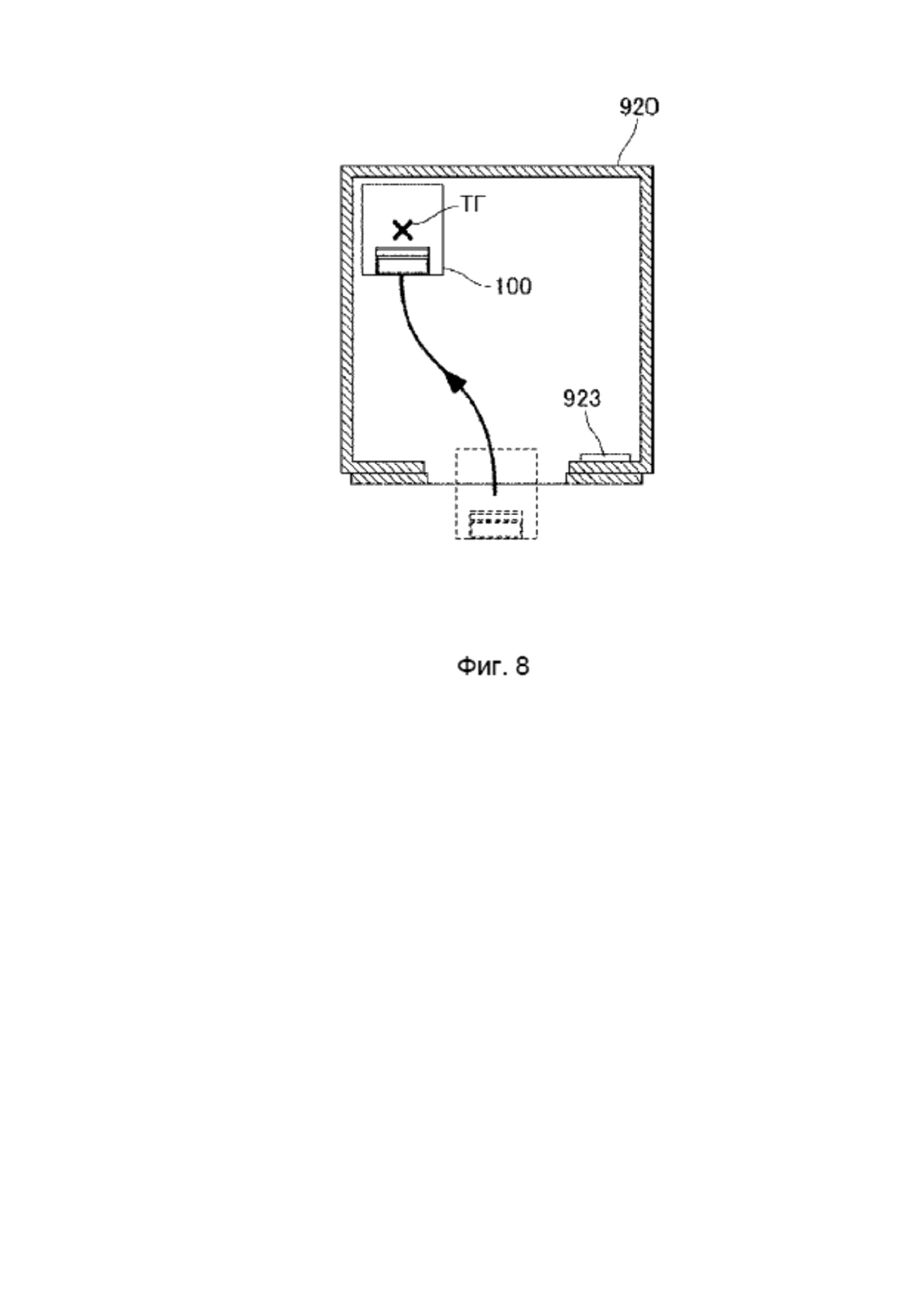
Фиг. 8 представляет собой схему, иллюстрирующую первое положение ожидания в кабине 920 лифта. Первое положение ожидания представляет собой положение, в котором задняя часть мобильного робота 100 находится напротив поверхности стенки кабины 920 лифта. После того, как мобильный робот 100 вошел в кабину 920 лифта, контроллер 203 движения устанавливает в качестве пункта назначения опорное положение ТГ первого положения ожидания и перемещает мобильный робот 100. Таким образом, когда мобильный робот 100 ожидает в положении со своей задней частью напротив поверхности стенки, между поверхностью стенки и мобильным роботом 100 отсутствуют люди, в результате чего менее вероятно, что мобильный робот 100 будет мешать людям, которые входят и выходят из кабины лифта. Ориентация мобильного робота 100 в первом положении ожидания предпочтительно совпадает с его ориентацией, когда он входит в кабину 920 лифта. Когда ориентация мобильного робота 100 в первом положении ожидания совпадает с его ориентацией, когда он входит в кабину 920 лифта, как показано на фиг. 8, сгенерированный маршрут от положения входа до положения ожидания становится плавным, и величина поворота, который требуется во время движения, уменьшается, за счет чего мобильный робот 100 способен относительно безопасно перемещаться даже в случае, когда присутствует человек, который уже вошел в кабину 920 лифта.
Кроме того, первое положение ожидания предпочтительно задается в пространстве, где не предусмотрена панель 923 управления, приводимая в действие человеком для указания этажа назначения, а не в пространстве, где предусмотрена такая панель 923 управления. Когда человек входит в кабину лифта, он приводит в действие панель 923 управления. Следовательно, когда первое положение ожидания установлено для пространства, где не предусмотрена панель 923 управления, мобильный робот 100 с меньшей вероятностью будет мешать людям, которые заходят в кабину лифта.
Фиг. 9 представляет собой схему, иллюстрирующую второе положение ожидания в кабине 920 лифта. Если кабина 920 лифта представляет собой асимметричное пространство, когда кабина 920 лифта видна из внутренней двери 921, второе положение ожидания устанавливается на стороне, где имеется широкое пространство, когда кабина 920 лифта видна из внутренней двери 921. После того, как мобильный робот 100 вошел в кабину 920 лифта, контроллер 203 движения устанавливает в качестве пункта назначения опорное положение ТГ второго положения ожидания и перемещает мобильный робот 100. Если мобильный робот 100 ожидает в месте, где имеется большое пространство, то становится возможным уменьшить ощущение стесненности, которое могут испытывать люди, едущие на лифте вместе с автономным подвижным корпусом. В этом случае также положение, в котором задняя часть мобильного робота 100 находится напротив поверхности стенки кабины 920 лифта, предпочтительно задается как положение ожидания. Кроме того, ориентация мобильного робота 100 во втором положении ожидания предпочтительно совпадает с его ориентацией, когда он входит в кабину 920 лифта.
Фиг. 10 представляет собой схему, иллюстрирующую третье положение ожидания в кабине 920 лифта. Третье положение ожидания представляет собой положение, при котором стереокамера 131 может захватывать изображения с более широким диапазоном, чем заранее заданный эталонный диапазон. Как показано на фиг. 10, если кабина 920 лифта представляет собой асимметричное пространство, когда кабина 920 лифта видна из внутренней двери 921, и на задней стороне предусмотрено сиденье 924, на котором сидит человек, который вошел в кабину 920 лифта, такое сиденье расположено в задней части кабины 920 лифта, на той стороне кабины 920 лифта, где есть большое пространство, и если в качестве положения ожидания установлено положение около сиденья 924, стереокамера 131 может получать изображения только в ограниченном диапазоне. В частности, когда мобильный робот 100 должен переместиться в это опорное положение ТГ2 и находиться в состоянии ожидания, диапазон захвата изображения представляет собой диапазон ЦА2, который показан горизонтальной штриховкой.
С другой стороны, когда мобильный робот 100 должен переместиться в опорное положение ТГ1, которое находится на удаленной задней стороне кабины 920 лифта, и находиться в состоянии ожидания, диапазон получения изображения представляет собой диапазон ЦА1, который показан вертикальной штриховкой. Как хорошо видно на фиг. 10, диапазон ЦА1 больше, чем диапазон ЦА2. Контроллер 203 движения находит, например, положение, в котором стереокамера 131 может получать изображения с диапазоном, более широким, чем эталонный диапазон, заданный, например, как 30 % для кабины 920 лифта, при этом контроллер использует карту 241 окружающего пространства, и устанавливает это положение в качестве третьего положения ожидания. После того, как мобильный робот входит в кабину 920 лифта, контроллер 203 движения устанавливает в качестве пункта назначения опорное положение ТГ1 третьего положения ожидания и перемещает мобильный робот 100. Когда стереокамера 131 способна захватывать изображения более широкого диапазона, как раскрыто выше, контроллер 200 способен надлежащим образом получить данные о состоянии в кабине 920 лифта, в результате чего мобильный робот 100 способен плавно выходить из кабины 920 лифта, в то же время соответствующим образом избегая столкновений с людьми, которые входят в кабину 920 лифта.
Следует отметить, что одно из вышеупомянутых положений может быть задано в качестве положения ожидания, или положение, которое удовлетворяет большему числу условий, может быть задано в качестве положения ожидания. Кроме того, для случая, когда одно из условий выполнено, но другие условия не выполнены, для каждого условия могут быть заранее установлены приоритеты, и положение, которое соответствует условию с более высоким приоритетом, может быть задано в качестве положения ожидания.
Далее будут даны разъяснения по обработке, которая относится к движению мобильного робота 100, в основном, будут даны разъяснения по обработке, которая относится к использованию лифта. Фиг. 11 представляет собой блок-схему, иллюстрирующую последовательность операций при движении мобильного робота 100. На блок-схеме последовательности операций, показанной на фиг. 11, задан маршрут перемещения к месту назначения, установленному на этаже, отличном от текущего этажа, и последовательность начинается с момента, когда мобильный робот 100 начал движение по этому маршруту перемещения.
Блок 201 определения положения периодически определяет текущее местоположение мобильного робота 100 посредством сравнения информации из блока 230 датчиков с картой 241 окружающего пространства. На этапе S101 блок 201 определения положения определяет, прибыл ли мобильный робот 100 в зону 911 ожидания, которая находится на этаже, по которому в данный момент движется мобильный робот 100. Когда блок 201 определения положения определяет, что мобильный робот 100 еще не прибыл в зону 911 ожидания, контроллер 203 движения продолжает движение по маршруту перемещения. Когда определено, что мобильный робот 100 прибыл в зону 911 ожидания, контроллер 203 движения останавливает движение, и процесс переходит к этапу S102.
На этапе S102 блок 202 установки ориентации определяет, необходима ли установка ориентации. Например, внутренние двери предусмотрены в двух противоположных друг другу местах в кабине лифта. Если внутренняя дверь, через которую мобильный робот входит в кабину лифта, отличается от внутренней двери, через которую мобильный робот выходит из кабины лифта, определяется, что установка ориентации не требуется, и процесс переходит к этапу S105. С другой стороны, если внутренняя дверь, через которую мобильный робот входит в кабину лифта, представляет собой ту же самую внутреннюю дверь, через которую мобильный робот выходит из кабины лифта, определяется, что требуется установка ориентации, и процесс переходит к этапу S103. Как раскрыто выше, когда предусмотрена только одна внутренняя дверь, указанное выше определение не выполняется, и процесс переходит к этапу S103.
На этапе S103 блок 202 установки ориентации проверяет, обнаружено ли препятствие в заранее заданном диапазоне относительно внешней рамы мобильного робота 100. Если препятствие обнаружено, установка ориентации не выполняется, и процесс переходит к этапу S105. Если препятствие не обнаружено, процесс переходит к этапу S104, на котором блок 202 установки ориентацией поворачивает мобильный робот 100 таким образом, чтобы направление выхода из кабины лифта на этаже назначения совпадало с направлением передней стороны мобильного робота 100, как раскрыто выше. Когда установка ориентации завершена, процесс переходит к этапу S105.
На этапе S105 мобильный робот 100 ожидает прибытия кабины 920 лифта. Необходимо отметить, что вызов кабины 920 лифта выполняется через блок 250 связи в соответствующее время перед выполнением этапа S105. Контроллер 200 определяет, прибыла ли вызванная кабина 920 лифта, в зависимости от того, открылись ли внутренняя дверь 921 и наружная дверь 922. Когда определено, что внутренняя дверь 921 и наружная дверь 922 открылись, процесс переходит к этапу S105.
На этапе S106 контроллер 203 движения заставляет мобильный робот 100 войти в кабину 920 лифта. Если на этапе S104 выполняется установка ориентации, контроллер 203 движения заставляет мобильный робот 100 войти в кабину 920 лифта, при этом сохраняя его ориентацию. Далее, процесс переходит к этапу S107, на котором контроллер 203 движения перемещает мобильный робот 100 в опорное положение в кабине 920 лифта, которое соответствует положению ожидания, установленному, как раскрыто выше. После этого мобильный робот 100 ждет, пока кабина 920 лифта не прибудет на этаж назначения. На этапе S108 контроллер 200 обменивается данными с системным сервером через блок 250 связи и проверяет, прибыла ли кабина 920 лифта на этаж назначения. После прибытия кабины 920 лифта на этаж назначения, процесс переходит к этапу S109.
На этапе S109 контроллер 203 движения обеспечивает выход из кабины 920 лифта и начало движения в проходе 910 на этаже назначения. На этапе S110 блок 201 определения положения определяет, достиг ли мобильный робот 100 заданного пункта назначения. Если определено, что мобильный робот 100 еще не прибыл в пункт назначения, продолжается движение по маршруту перемещения. Когда мобильный робот 100 прибывает в заданный пункт назначения, движение мобильного робота 100 останавливается, и последовательность процессов заканчивается. Когда маршрут перемещения, по которому мобильный робот 100 далее перемещается на другой этаж с использованием лифта, задан, процесс возвращается к этапу S101, на котором продолжается выполнение процесса.
Мобильный робот 100, описанный выше, выполняет различные виды процессов, обеспечивающих его автономное перемещение. Тем не менее, может использоваться другой вариант осуществления изобретения, в котором мобильный робот выполняет только простую обработку перемещения в ответ на команду, отправленную с системного сервера, расположенного в удаленном месте, что позволяет уменьшить объем выполняемых процессов в мобильном роботе. Фиг. 12 представляет собой схему для описания системы мобильного робота согласно этому варианту осуществления изобретения. Система мобильного робота содержит системный сервер 500 и мобильный робот 100', соединенный с системным сервером 500 через сеть 600 и блок 610 связи.
Системный сервер 500 содержит операционный блок 510, память 540 и блок 550 связи. Операционный блок 510 представляет собой, например, ЦПУ и управляет всей системой, выполняя управляющую программу, загруженную из памяти 540.
Память 540, которая является энергонезависимым носителем данных, может представлять собой, например, жесткий диск. Память 540 хранит, помимо управляющей программы для управления системой мобильного робота, различные значения параметров, функции, справочные таблицы и т.д., которые используются для управления. В частности, память 540 хранит карту 541 окружающего пространства, в которой содержится информация, относящаяся к карте сооружения, в котором в автономном режиме перемещается мобильный робот 100'. Блок 250 связи представляет собой устройство связи, которое должно быть подключено к сети 600. Операционный блок 510 передает и принимает различные командные сигналы и информацию, которые поступают в мобильный робот 100' и приходят от него посредством блока 550 связи, сеть 600 и блок 610 связи, который, например, представляет собой блок беспроводной локальной сети, установленный в сооружении.
Операционный блок 510, который служит функциональным операционным блоком, также функционирует как блок 511 определения положения, блок 512 команд установки и блок 513 команд перемещения. Блок 511 определения положения получает информацию из блока 230 датчиков мобильного робота 100' и определяет текущее местоположение мобильного робота 100' посредством сравнения информации из блока 230 датчиков мобильного робота 100' с картой 541 окружающего пространства, сохраненной в памяти 540. Блок 511 определения положения определяет, в частности, что мобильный робот 100' прибыл в зону ожидания, установленную на текущем этаже, прежде чем мобильный робот 100' войдет в кабину лифта. Блок 511 определения положения, по существу, выполняет функцию, которую выполняет блок 201 определения положения мобильного робота 100. Когда мобильный робот 100' в автономном режиме определяет зону 911 ожидания в соответствии с состоянием на этаже, модуль 511 определения положения получает от мобильного робота 100' информацию в точке, определенной как зона 911 ожидания, и информацию, указывающую, что мобильный робот 100' прибыл в эту точку. После получения этих элементов информации блок 511 определения положения определяет, что мобильный робот 100' прибыл в зону ожидания на текущем этаже.
Блок 512 команд установки передает в мобильный робот 100' команды установки для установки ориентации мобильного робота 100' на основе направления выхода из кабины лифта на этаже назначения, когда блок 511 определения положения определяет, что мобильный робот 100' прибыл в зону ожидания. Блок 512 команд установки, по существу, выполняет функцию, аналогичную функции блока 202 установки ориентации мобильного робота 100. Мобильный робот 100' получает команды установки от блока 512 команд установки и выполняет установку ориентации мобильного робота 100'.
Блок 513 команд перемещения передает команды для управления перемещением на мобильный робот 100' таким образом, чтобы мобильный робот 100' двигался по заданной траектории движения. В частности, когда прибывает кабина лифта, блок 513 команд перемещения передает на мобильный робот 100' команду для управления перемещением, чтобы заставить мобильный робот 100' войти в кабину лифта, сохраняя при этом ориентацию, установленную командой, полученной от блока 512 команд установки.
В системе мобильного робота, сконструированной таким образом, мобильный робот 100' может работать так же, как и вышеупомянутый мобильный робот 100. В этом случае, поскольку мобильный робот 100' может выполнять вычислительную обработку данных, нагрузка которой относительно мала, можно создать более простую конструкцию мобильного робота 100'.
Упомянутая выше управляющая программа может храниться и передаваться в компьютер с использованием хранящихся на компьютере читаемых носителей данных любого типа. К компьютерным читаемым носителям с постоянным хранением данных относятся любые типы материальных носителей. Примерами компьютерных читаемых носителей с постоянным хранением данных являются магнитные носители информации (такие как дискеты, магнитные ленты, жесткие диски и т.д.), оптические магнитные носители информации (например, магнитооптические диски), CD-ROM (накопители на основе компакт-дисков, с возможностью только чтения данных), CD-R (записываемые компакт-диски), CD-R/W (перезаписываемые компакт-диски), и полупроводниковые устройства памяти (например, масочные ПЗУ, ППЗУ (программируемые ПЗУ)), ЭППЗУ (ППЗУ с возможностью стирания данных), флэш-память, ОЗУ (оперативные запоминающие устройства) и т.д. Программа может быть передана в компьютер с использованием любого типа компьютерных читаемых носителей с временным хранением данных. Примерами компьютерных читаемых носителей с временным хранением данных являются электрические сигналы, оптические сигналы и электромагнитные волны. Компьютерный читаемый носитель с временным хранением данных может передать программу в компьютер через проводную линию связи (например, электрические провода и оптические волокна) или по беспроводной линии связи.
Из приведенного выше раскрытия следует, что варианты осуществления изобретения могут значительно различаться. Такие изменения не должны рассматриваться, как отступление от сущности и объема настоящего изобретения, и все подобные изменения, очевидные специалисту в данной области техники, входят в объем следующей формулы изобретения.
Реферат
Группа изобретений относится к области робототехники, а именно к области автономных транспортных роботов для использования в зданиях. Техническим результатом является обеспечение возможности плавного выхода из кабины лифта в течение короткого периода времени. Группа изобретений включает в себя автономный подвижный корпус, содержащий: блок определения, выполненный с возможностью определения того, что автономный подвижный корпус прибыл в зону ожидания на текущем этаже перед тем, как автономный подвижный корпус входит в кабину лифта; блок установки ориентации, выполненный с возможностью установки, когда блок определения определяет, что автономный подвижный корпус прибыл в зону ожидания, ориентации автономного подвижного корпуса на основе направления выхода из кабины лифта на этаже назначения; контроллер движения, выполненный с возможностью осуществить, когда прибывает кабина лифта, вход автономным подвижным корпусом в кабину лифта, сохраняя при этом ориентацию, установленную блоком установки ориентации; а также способ и сервер для управления им. 4 н. и 8 з.п. ф-лы, 12 ил.
Комментарии