Система и способ управления роботом, вычислительное устройство и носитель данных - RU2757646C1
Код документа: RU2757646C1
Чертежи







Описание
Согласно настоящей заявке испрашивается приоритет заявки на патент Китая №201811062251,7, поданной 12 сентября 2018 г, и заявки на патент Китая №201910258694.1, поданной 01 апреля 2019 г., раскрытия которых включены в настоящий документ посредством ссылки во всей полноте.
Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к складскому делу, например, к системе и способу управления роботом, вычислительному устройству и носитель данных.
Предшествующий уровень техники настоящего изобретения
В автоматизированной схеме штучного подбора «товар к человеку» на складе многоуровневая схема подбора, используемая в трехмерном пространстве в предшествующем уровне техники, в основном реализуется с помощью трехмерного транспортного шаттла. Однако схема с трехмерным транспортным шаттлом предъявляет высокие требования к точности стеллажа, а также характеризуется относительно высокими требованиями к показателю оседания грунта и показателю плоскостности. Если показатель оседания грунта и показатель плоскостности не соответствуют стандартам, транспортный шаттл застрянет на направляющей, что приведет к особенно высоким затратам на строительство. Кроме того, техническое обслуживание для устранения неисправности системы является сложным, и вход на трехмерную направляющую стеллажа для человека также очень опасен. Следовательно, осуществление операций вручную невозможно в случае отказа системы.
Схема автоматизированного подбора «контейнер к человеку» на основе робота представляет собой многоуровневую схему подбора, которая направлена на использование трехмерного пространства. Обычно в нем используется обычный стеллаж для чердака. Робот перемещается по ярусам чердака, при этом не нужно предусматривать специальные направляющие стеллажей. Механизм захвата ящиков робота можно поднимать и опускать, чтобы захватывать контейнеры со стеллажей на разной высоте на одном ярусе чердака. Робот может захватывать один или несколько ящиков за раз и транспортировать их на рабочий участок. После осуществления операции сортировки на рабочем участке робот возвращает ящик на стеллаж. Ярус, на котором находится рабочий участок, - это рабочий ярус, а остальные ярусы предназначены для хранения. Когда контейнер, расположенный на ярусе для хранения, необходимо транспортировать на рабочий ярус для осуществления с ним операций, или контейнер с одного рабочего яруса необходимо транспортировать на другой рабочий ярус для осуществления с ним операций, тогда потребуется межуровневая транспортировка контейнера. В настоящее время в общей многоуровневой схеме подборки используется трехмерный транспортный шаттл, в котором используется схема межуровневой транспортировки следующего контейнера, а именно подъемная машина работает во взаимодействии с линией транспортировки для транспортировки контейнера к рабочему участку для осуществления с ним операций. Однако трехмерный транспортный шаттл обладает относительно высокой сложностью транспортировки, и его трудно гибко размещать, что приводит к относительно высокой стоимости схемы автоматического подбора.
Краткое раскрытие настоящего изобретения
Согласно вариантам осуществления настоящего изобретения предлагается способ и система управления роботом, вычислительное устройство и носитель данных, предназначенные для преодоления недостатков в решениях, известных из предшествующего уровня техники.
Согласно одному варианту осуществления настоящего изобретения предлагается система управления роботом, содержащая область хранения, подъемную машину, устройство управления и по меньшей мере одного самоходного робота. Устройство управления соединено с возможностью связи с подъемной машиной и по меньшей мере одним самоходным роботом. Область хранения содержит чердак, характеризующийся наличием по меньшей мере двух ярусов и приспособленный для хранения контейнера, причем на полу каждого из по меньшей мере двух ярусов чердака предусмотрен проход для перемещения по меньшей мере одного самоходного робота. Подъемная машина выполнена с возможностью транспортировки по меньшей мере одного самоходного робота или контейнера на целевой ярус, соответствующий задаче транспортировки. Устройство управления выполнено с возможностью назначения задачи транспортировки по меньшей мере одному самоходному роботу и планирования маршрута перемещения на целевом ярусе для самоходного робота согласно задаче транспортировки, и отдачи команды по меньшей мере одному самоходному роботу на перемещение согласно маршруту перемещения для выполнения задачи транспортировки. Самоходный робот выполнен с возможностью прибытия в место расположения целевого контейнера на целевом ярусе, соответствующем задаче транспортировки, согласно маршруту перемещения, соответствующему задаче транспортировки, захвата целевого контейнера и транспортировки целевого контейнера в пункт назначения задачи транспортировки согласно маршруту перемещения. Контейнер представляет собой складскую тару, хранящуюся на несущей конструкции для контейнеров, расположенной в области хранения.
Согласно одному варианту осуществления настоящего изобретения предлагается способ управления роботом, предусматривающий: назначение задачи транспортировки по меньшей мере одному самоходному роботу; планирование маршрута перемещения на целевом ярусе, соответствующем задаче транспортировки, для по меньшей мере одного самоходного робота, управление по меньшей мере одним самоходным роботом для перемещения в место расположения целевого контейнера, соответствующее задаче транспортировки, согласно маршруту перемещения, и захвата целевого контейнера; управление по меньшей мере одним самоходным роботом, перевозящим целевой контейнер, для перемещения в положение, где расположена подъемная машина; управление подъемной машиной для транспортировки по меньшей мере одного самоходного робота на целевой ярус, где находится пункт назначения задачи транспортировки; и управление по меньшей мере одним самоходным роботом для транспортировки целевого контейнера в пункт назначения задачи транспортировки.
Согласно одному варианту осуществления настоящего изобретения предлагается способ управления роботом, предусматривающий: получение задачи транспортировки, назначенной устройством управления; перемещение в место расположения целевого контейнера, соответствующее задаче транспортировки, на целевом ярусе, соответствующем задаче транспортировки, согласно маршруту перемещения, запланированному устройством управления, и захват целевого контейнера; и транспортировку целевого контейнера в пункт назначения задачи транспортировки согласно маршруту перемещения.
Согласно варианту осуществления настоящего изобретения предлагается вычислительное устройство, содержащее запоминающее устройство, процессор и компьютерные инструкции, хранящиеся в запоминающем устройстве и исполняемые процессором. Компьютерные инструкции при исполнении процессором обеспечивают выполнение любого из способов управления роботом.
Согласно одному варианту осуществления настоящего изобретения предлагается машиночитаемый носитель данных, на котором хранятся исполняемые компьютером инструкции, которые при исполнении обеспечивают выполнение любого из способов управления роботом.
Краткое описание фигур
На фиг, 1 показана структурная схема системы управления роботом согласно одному варианту осуществления настоящего изобретения.
На фиг. 2 показана структурная схема, изображающая схему связи устройства управления роботом, согласно одному варианту осуществления настоящего изобретения.
На фиг. 3 показана структурная схема самоходного робота в системе управления роботом согласно одному варианту осуществления настоящего изобретения.
На фиг. 4 показана структурная схема подъемной машины в системе управления роботом согласно одному варианту осуществления настоящего изобретения.
На фиг. 5 показан вид сверху яруса области хранения в другой системе управления роботом согласно одному варианту осуществления настоящего изобретения.
На фиг. 6 показана блок-схема способа управления роботом согласно одному варианту осуществления настоящего изобретения.
На фиг. 7 показана блок-схема способа управления роботом согласно одному варианту осуществления настоящего изобретения.
На фиг. 8 показана структурная схема системы управления роботом согласно другому варианту осуществления настоящего изобретения.
На фиг. 9 показан вид сверху яруса области хранения в системе управления роботом согласно одному варианту осуществления настоящего изобретения.
На фиг. 10 показана блок-схема способа управления роботом согласно одному варианту осуществления настоящего изобретения.
На фиг. 11 показана блок-схема способа управления роботом согласно другому варианту осуществления настоящего изобретения.
На фиг. 12 показана блок-схема способа управления роботом согласно еще одному варианту осуществления настоящего изобретения.
На фиг. 13 показана структурная схема системы управления роботом согласно другому варианту осуществления настоящего изобретения.
Подробное раскрытие настоящего изобретения
Подробности изложены ниже, чтобы облегчить полное понимание настоящего изобретения. Однако настоящее изобретение может быть реализовано во многих формах, отличных от вариантов осуществления, описанных в настоящем документе, и специалисты в данной области техники смогут сделать аналогичные расширения без отхода от сущности настоящего изобретения, поэтому настоящее изобретение не ограничивается конкретными вариантами осуществления, описанными ниже.
На фиг. 1 показана система управления роботом согласно одному варианту осуществления настоящего изобретения. Система управления роботом содержит область хранения, подъемную машину 104, устройство 105 управления, рабочий участок 106 и по меньшей мере одного самоходного робота 103.
Область хранения содержит чердак, характеризующийся наличием по меньшей мере двух ярусов и приспособленный для хранения контейнера 101, и на полу каждого из по меньшей мере двух ярусов чердака предусмотрен проход 102 для перемещения по меньшей мере одного самоходного робота.
Контейнер 101 может представлять собой складскую тару или упаковочный ящик на несущей конструкции для контейнеров, поддон на несущей конструкции для контейнеров или другие контейнеры, которые могут использоваться для хранения предметов.
Несущая конструкция для контейнеров может представлять собой стеллаж.
Самоходный робот 103 может перемещаться на каждом ярусе чердака через проход 102, который предназначен для перемещения самоходного робота 103.
Подъемная машина 104 выполнена с возможностью транспортировки самоходного робота 103 или контейнера 101 на целевой ярус, соответствующий задаче транспортировки.
Устройство 105 управления выполнено с возможностью назначения задачи транспортировки самоходному роботу 103 и планирования маршрута перемещения на целевом ярусе для самоходного робота 103 согласно задаче транспортировки, и отдачи команды самоходному роботу 103 на перемещение согласно маршруту перемещения и выполнения задачи транспортировки.
Самоходный робот 103 выполнен с возможностью прибытия в место расположения целевого контейнера на целевом ярусе, соответствующем задаче транспортировки, согласно маршруту перемещения, соответствующему задаче транспортировки, для захвата целевого контейнера и транспортировки целевого контейнера в пункт назначения задачи транспортировки согласно маршруту перемещения.
Устройство 105 управления соединено с возможностью связи с подъемной машиной 104 и самоходным роботом 103.
Область хранения характеризуется наличием рабочего участка 106 на по меньшей мере одном полу чердака, и рабочий участок 106 используется для выполнения заданной операции в отношении контейнера 101. Заданная операция может представлять собой такие операции, как операция захвата, операция инвентаризации, операция захвата товара и операция учета.
В системе управления роботом, предложенной в варианте осуществления настоящего изобретения, на полу каждого яруса чердака для перемещения самоходного робота предусмотрен проход, и с ним связана подъемная машина, вследствие чего самоходный робот может перемещаться на каждом ярусе. Таким образом, повышается гибкость применения самоходного робота, можно выполнять различные операции в соответствии с фактическими требованиями, и нет необходимости устанавливать направляющие для шаттлов, что значительно снижает стоимость строительства.
На фиг. 2 показана структурная схема связи устройства управления роботом согласно одному варианту осуществления настоящего изобретения.
Компоненты устройства 105 управления включают, без ограничения, запоминающее устройство 210 и процессор 220. Процессор 220 соединен с запоминающим устройство 210 посредством шины 230, и база 250 данных выполнена с возможностью хранения задачи транспортировки.
Устройство 105 управления дополнительно содержит устройство 240 доступа, которое позволяет устройству 105 управления осуществлять связь через одну или несколько сетей 260. Примеры сетей включают телефонную сеть общего пользования (PSTN), локальную сеть (LAN), глобальную сеть (WAN), персональную сеть (PAN) или комбинацию сетей связи, такую как Интернет. Устройство 240 доступа может содержать один или несколько сетевых интерфейсов любого типа (например, сетевую интерфейсную карту (NIC)) проводного или беспроводного подключения, например, беспроводной интерфейс беспроводной локальной сети (WLAN) ШЕЕ 802.11, интерфейса технологии широкополосного доступа в микроволновом диапазоне (Wi-MAX), интерфейса Ethernet, интерфейса универсальной последовательной шины (USB), интерфейса сотовой сети, интерфейса Bluetooth и интерфейса беспроводной связи ближнего радиуса действия (NFC).
Согласно одному варианту осуществления настоящего изобретения вышеупомянутое устройство 105 управления и другие компоненты, не показанные на фиг. 2, также могут быть соединены друг с другом, например, посредством шины.
Устройство 105 управления может быть стационарным или мобильным вычислительным устройством любого типа, включая мобильный компьютер или мобильное вычислительное устройство (например, планшетный компьютер, персональный цифровой ассистент, портативный компьютер, ноутбук и нетбук), мобильный телефон (например, смартфон), носимое вычислительное устройство (например, умные часы и умные очки) или другие типы мобильных устройств, или стационарное вычислительное устройство, такое как настольный компьютер или персональный компьютер (PC). Устройство 105 управления также может представлять собой мобильный или стационарный сервер.
Устройство 105 управления соединено с возможностью связи с самоходным роботом 103 и подъемной машиной посредством сети 260 и управляет системой управления роботом за счет передачи управляющих инструкций или приема сообщения, возвращаемого самоходным роботом или подъемной машиной.
Согласно одному варианту осуществления настоящего изобретения задача транспортировки может предусматривать наличие идентификационного кода целевого контейнера; и по меньшей мере один самоходный робот перемещается в место расположения целевого контейнера на целевом ярусе согласно маршруту перемещения и может захватывать целевой контейнер в результате распознавания идентификационного кода целевого контейнера.
Следует отметить, что вариант осуществления настоящего изобретения не ограничивает конструкцию самоходного робота, причем снятие контейнера со стеллажа и укладка контейнера на стеллаж могут быть достигнуты посредством любой из конструкций, известных из уровня техники. Например, на самоходном роботе может быть расположена механическая рука, и механическая рука используется для захвата контейнера со стеллажа и укладки контейнера на стеллаж; зажимная конструкция также может быть расположена на самоходном роботе, и контейнер снимается со стеллажа и укладывается на стеллаж в зажатом состоянии; или контейнер может быть снят со стеллажа и уложен на стеллаж с использованием других конструкций.
Как показано на фиг. 3, согласно одному варианту осуществления настоящего изобретения по меньшей мере один самоходный робот 103 содержит захватный телескопический механизм 301, подъемный механизм 302 и шасси 303 для перемещения робота.
Захватный телескопический механизм 301 выполнен с возможностью получения одного или нескольких целевых контейнеров.
Подъемный механизм 302 выполнен с возможностью регулировки захватного телескопического механизма 301 для перемещения вверх или вниз таким образом, что захватный телескопический механизм получает целевые контейнеры со стеллажей на разной высоте целевого яруса.
Шасси 303 для перемещения робота выполнено с возможностью управления по меньшей мере одним самоходным роботом для перемещения по проходу для перемещения на целевом ярусе согласно маршруту перемещения, запланированному устройством управления.
Целевой контейнер представляет собой контейнер 101, который подлежит транспортировке задачи транспортировки.
Самоходный робот, предложенный согласно варианту осуществления настоящего изобретения, перемещается по проходу для перемещения на полу каждого яруса чердака, вследствие чего гибкость транспортировки контейнера значительно повышается, можно выполнять различные операции в соответствии с фактическими требованиями, и нет необходимости устанавливать направляющие для шаттлов, что значительно снижает стоимость строительства.
Как показано на фиг. 4, согласно одному варианту осуществления настоящего изобретения подъемная машина 104 характеризуется наличием положения 104А временного хранения, приспособленного для временного хранения самоходного робота 103 или целевого контейнера.
Целевой контейнер представляет собой контейнер 101, который подлежит транспортировке задачи транспортировки.
На фиг. 5 показан вид сверху яруса согласно одному варианту осуществления настоящего изобретения. Ярус содержит отделение 501 для хранения стеллажа, рабочий участок 106 и проход 102 для перемещения.
Отделение 501 для хранения стеллажа используется для хранения контейнера.
Такие операции, как операция захвата, операция инвентаризации, операция пополнения запасов или операция учета, могут быть выполнены в отношении товаров в транспортируемом контейнере на множестве рабочих участков 106.
Проход 102 для перемещения используется для перемещения самоходного робота.
Согласно варианту осуществления настоящего изобретения область хранения содержит чердак, характеризующийся наличием по меньшей мере двух ярусов. В случае если контейнер подлежит транспортировке между разными ярусами, контейнер может транспортироваться с использованием подъемной машины.
Согласно варианту осуществления настоящего изобретения предлагается два режима подъема робота и подъема контейнера.
Два режима представлены соответственно ниже.
Согласно одному варианту осуществления настоящего изобретения задача транспортировки состоит из первой задачи транспортировки и второй задачи транспортировки. В первой задаче транспортировки целевой контейнер подлежит транспортировке в положение временного хранения подъемной машины. Во второй задаче транспортировки самоходный робот, перевозящий целевой контейнер, подлежит транспортировке на рабочий участок или несущую конструкцию для контейнеров целевого яруса. Эта схема представляет собой режим подъема робота. Устройство управления управляет прибытием первого самоходного робота в место расположения целевого контейнера на целевом ярусе, соответствующем первой задаче транспортировки, согласно первому маршруту перемещения, соответствующему первой задаче транспортировки, для захвата целевого контейнера и транспортировки целевого контейнера в положение временного хранения подъемной машины, а затем сигнал состояния готовности передается на устройство управления.
Несущая конструкция для контейнеров может представлять собой отделение для хранения на стеллаже.
Пункт назначения второй задачи транспортировки предусматривает рабочий участок или отделение для хранения на стеллаже целевого яруса второй задачи транспортировки. Устройство управления принимает сигнал состояния готовности и управляет подъемной машиной для транспортировки первого самоходного робота на целевой ярус второй задачи транспортировки; и управляет первым самоходным роботом для перемещения по целевому ярусу второй задачи транспортировки согласно второму маршруту перемещения, соответствующему второй задаче транспортировки, и транспортирует целевой контейнер на рабочий участок или в отделение для хранения на стеллаже целевого яруса второй задачи транспортировки.
В режиме подъема робота самоходный робот может прибывать на разные ярусы посредством подъемной машины, вследствие чего каждый самоходный робот может получать контейнер с любого яруса и транспортировать контейнер на рабочий участок любого яруса, и после осуществления операций с контейнером на рабочем участке самоходный робот может возвращать контейнер в отделение для хранения на стеллаже любого яруса.
Следует отметить, что в режиме подъема робота то, перевозит ли поднимаемый самоходный робот контейнер, может быть определено согласно фактической ситуацией, и не является ограничением настоящего изобретения.
Согласно другому варианту осуществления настоящего изобретения задача транспортировки состоит из первой задачи транспортировки и второй задачи транспортировки, В первой задаче транспортировки целевой контейнер подлежит транспортировке в положение временного хранения подъемной машины. Во второй задаче транспортировки целевой контейнер подлежит транспортировке на рабочий участок или в отделение для хранения на стеллаже целевого яруса. Эта схема представляет собой режим подъема контейнера. Второй самоходный робот прибывает в место расположения целевого контейнера на целевом ярусе, соответствующем первой задаче транспортировки, согласно первому маршруту перемещения, соответствующему первой задаче транспортировки, для захвата целевого контейнера и транспортирует целевой контейнер в положение временного хранения подъемной машины, а затем сигнал состояния готовности передается на устройство управления.
Пункт назначения второй задачи транспортировки представляет собой рабочий участок или отделение для хранения на стеллаже целевого яруса второй задачи транспортировки. Устройство управления принимает сигнал состояния готовности и управляет подъемной машиной для подъема целевого контейнера на целевой ярус; и управляет третьим самоходным роботом, расположенным на целевом ярусе, для перемещения по целевому ярусу согласно второму маршруту перемещения, соответствующему второй задаче транспортировки, и транспортирует целевой контейнер на рабочий участок или в отделение для хранения на стеллаже целевого яруса второй задачи транспортировки. Второй самоходный робот отличается от третьего самоходного робота.
В режиме подъема контейнера контейнер может быть оттранспортирован на рабочий участок или в отделение для хранения на стеллаже любого яруса за счет взаимодействия между самоходными роботами, расположенными на разных ярусах, и подъемной машиной.
Согласно одному варианту осуществления настоящего изобретения в режиме подъема контейнера подъемная машина может быть дополнительно соединена с роликовой конвейерной линией рабочего участка. Устройство управления принимает сигнал состояния, переданный подъемной машиной, управляет подъемной машиной для транспортировки целевого контейнера на целевой ярус третьей задачи транспортировки, и управляет подъемной машиной для переноса целевого контейнера на роликовую конвейерную линию, посредством которой целевой контейнер транспортируется на рабочий участок.
В практической реализации роликовая конвейерная линия может быть дополнительно выполнена с возможностью получения контейнера, с которым заданная операция была осуществлена на рабочем участке, и заданная операция может представлять собой операцию захвата.
Согласно одному варианту осуществления настоящего изобретения устройство управления может дополнительно управлять подъемной машиной для захвата целевого контейнера с роликовой конвейерной линии и укладки целевого контейнера в положении временного хранения подъемной машины, и транспортировки целевого контейнера на целевой ярус задачи транспортировки. Устройство управления управляет самоходным роботом, расположенным на целевом ярусе, для захвата целевого контейнера из положения временного хранения подъемной машины и транспортировки целевого контейнера в пункт назначения задачи транспортировки.
После перемещения самоходного робота, перевозящего целевой контейнер, на рабочий участок, устройство управления может управлять самоходным роботом для постановки в очередь на рабочем участке и ожидания заданной операции. После осуществления заданной операции устройство управления управляет самоходным роботом для перевозки целевого контейнера, с которым была осуществлена заданная операция, и транспортировки целевого контейнера на следующий рабочий участок или возврата целевого контейнера в отделение для хранения на стеллаже.
Для повышения эффективности работы самоходного робота, после того как самоходный робот выталкивает целевой контейнер на рабочий участок, целевой контейнер выталкивается в положение хранения рабочего участка, и устройство управления может управлять самоходным роботом для получения по меньшей мере одного пригодного к использованию контейнера, отличающегося от целевого контейнера, и транспортировки по меньшей мере одного пригодного к использованию контейнера в отделение для хранения.
Положение хранения рабочего участка может представлять собой стеллаж временного хранения или роликовую конвейерную линию для временного хранения рабочего участка.
Пригодный к использованию контейнер может представлять собой контейнер, в отношении которого была осуществлена заданная операция.
Согласно одному варианту осуществления настоящего изобретения устройство управления дополнительно выполнено с возможностью: приема и хранения кода целевого контейнера и выполнения оценки востребованности целевого контейнера согласно востребованности и количеству товаров, хранящихся в целевом контейнере; управления самоходным роботом для транспортировки целевого контейнера, востребованность которого превышает заданное пороговое значение, в отделение для хранения на стеллаже в заданном участке, и записи взаимосвязи между целевым контейнером и отделением для хранения; или управления самоходным роботом для транспортировки целевого контейнера в отделение для хранения на стеллаже за счет увеличения расстояния от рабочего участка согласно порядку по убыванию востребованности целевого контейнера, и записи взаимосвязи между целевым контейнером и отделением для хранения.
Заданный участок может представлять собой участок, где расположено отделение для хранения, которое находится относительно близко к рабочему участку, например, он может представлять собой отделение для хранения, находящееся на расстоянии 3 метров или 5 метров от рабочего участка. Таким образом, контейнер, в котором расположены товары, которые часто берут и используют, хранится в отделении для хранения, которое находится относительно близко к рабочему участку, что сокращает время, необходимое для транспортировки, и повышает эффективность обработки.
Стеллаж для контейнеров представляет собой стеллаж, расположенный на каждом этаже чердака в области хранения, каждый стеллаж для контейнеров содержит множество отделений для хранения, и в каждом отделении для хранения может храниться один контейнер.
Согласно одному варианту осуществления настоящего изобретения проход для перемещения самоходного робота может быть приспособлен для работы вручную в аварийной ситуации.
Кроме того, область хранения может быть дополнительно оснащена лестницей или лифтом.
В случае неполадок в системе, например, в случае сбоя питания или если система не может работать нормально, рабочие выполняют задачу транспортировки по проходам для перемещения множества ярусов с помощью лестницы или лифта для осуществления работы вручную в аварийной ситуации.
Чтобы точно определить положение контейнера, контейнер снабжен идентификационным кодом для идентификации, причем идентификационный код может представлять собой двумерный код, метку радиочастотной идентификации (RFID) и т.п.
На основании системы эксплуатации робота, описанной выше, могут быть осуществлены различные бизнес-процессы. Процесс сдачи на хранение с полной загрузкой контейнера, процесс сдачи на хранение и последовательность операций рабочего участка описаны в качестве примера ниже.
Процесс пополнения относится к тому, что товары не сдаются на хранение вместе с контейнером, а помещаются в существующий контейнер. Работа на рабочем участке предусматривает такие работы, как вывоз со склада, инвентаризация или учет.
Согласно одному варианту осуществления настоящего изобретения процесс сдачи на хранение с полной загрузкой контейнера предусматривает стадии, описанные ниже.
На стадии (1) устройство управления принимает номер контейнера, номер изделия и количество товаров, и записывает взаимосвязь между ними. Один контейнер может быть связан с различными товарами.
На стадии (2) устройство управления определяет, имеется ли пустой контейнер на стеллаже для контейнеров. На основании результата определения того, что на стеллаже для контейнеров есть пустой контейнер, устройство управления отдает команду самоходному роботу на получение пустого контейнера и транспортировку пустого контейнера на рабочий участок, и управляет самоходным роботом для постановки в очередь на рабочем участке. На основании определения того, что в отделении для хранения нет пустого контейнера, устройство управления непосредственно управляет самоходным роботом для постановки в очередь на рабочем участке.
Когда необходимо переместить самоходного робота вверх или вниз по ярусам на траектории транспортировки, самоходный робот транспортируется на соответствующий этаж подъемной машиной. Стадия (2) и стадия (1) могут выполняться одновременно.
На стадии (3) самоходный робот получает контейнер, обнаруживает код контейнера и отправляет код контейнера на устройство управления, причем устройство управления записывает номер контейнера, транспортируемого самоходным роботом.
На стадии (4) устройство управления выделяет для контейнера соответствующее отделение для хранения на стеллаже согласно востребованности и количеству товаров в контейнере.
На стадии (5), в случае если контейнеры уложены во все положения временного хранения контейнеров самоходного робота, или не осталось контейнеров для сдачи на хранения на рабочем участке, устройство управления отдает команду самоходному роботу покинуть рабочий участок и планирует оптимальную последовательность траекторий для возврата контейнера для самоходного робота, и самоходный робот последовательно перемещается в положения отделений для хранения, выделенных системой, и укладывает контейнер в отделение для хранения. Когда необходимо переместить самоходного робота вверх или вниз по ярусам на траектории, самоходный робот транспортируется на соответствующий этаж подъемной машиной.
Согласно одному варианту осуществления настоящего изобретения процесс пополнения предусматривает стадии, описанные ниже.
На стадии (1) устройство управления выбирает множество контейнеров, в которых могут храниться товары, в соответствии с товарами, которые должны быть сданы на хранение.
Множество контейнеров могут представлять собой пустые контейнеры или контейнеры, в которых находятся товары, но все еще есть пространство для хранения.
Устройство управления управляет самоходным роботом для получения контейнеров и транспортировки контейнеров на рабочий участок, и самоходный робот становится в очередь на рабочем участке. Когда необходимо переместить самоходного робота вверх или вниз по ярусам на траектории, самоходный робот транспортируется на соответствующий этаж подъемной машиной.
На стадии (2) принимают код продукта и код контейнера, взаимосвязь между контейнером и товарами записывают, и самоходным роботом управляют для получения товаров посредством контейнера.
На стадии (3) при условии, что операция пополнения осуществляется в настоящее время на рабочем участке, или что в контейнере, в настоящий момент перевозимом самоходным роботом, нет пространства для хранения, условие подается обратно через интерактивный интерфейс устройства управления, и устройство управления выделяет для контейнера отделение для хранения на соответствующем стеллаже для контейнеров согласно востребованности и количеству товаров в контейнере.
На стадии (4) устройство управления отдает команду самоходному роботу покинуть рабочий участок и планирует оптимальную последовательность траекторий для возврата контейнера для самоходного робота, и самоходный робот перемещается в положение отделения для хранения, выделенное устройством управления, и укладывает контейнер в отделение для хранения. Когда необходимо переместить самоходного робота вверх или вниз по ярусам на траектории, самоходный робот транспортируется на соответствующий этаж подъемной машиной.
Согласно одному варианту осуществления настоящего изобретения последовательность операций рабочего участка предусматривает стадии, описанные ниже.
На стадии (1) на рабочем участке начинают работу, устройство управления сверяет множество контейнеров в соответствии с рабочим документом, устройство управления выделяет самоходного робота для получения контейнеров и транспортировки пустых контейнеров на рабочий участок, и самоходный робот становится в очередь на рабочем участке. Когда необходимо переместить самоходного робота вверх или вниз по ярусам на траектории, самоходный робот транспортируется на соответствующий этаж подъемной машиной.
На стадии (2) на рабочем участке выполняют работу, и информация о том, что операция с контейнером, который перевозится в настоящий момент самоходным роботом, осуществлена, подается обратно на устройство управления посредством интерактивного интерфейса устройства управления.
На стадии (3) устройство управления выделяет для контейнера отделение для хранения на соответствующем стеллаже согласно востребованности и количеству текущих товаров в контейнере.
На стадии (4) устройство управления отдает команду самоходному роботу покинуть рабочий участок и планирует оптимальную последовательность траекторий для возврата контейнера для самоходного робота, и самоходный робот перемещается в положения отделений для хранения, выделенных системой, и укладывает контейнер в отделение для хранения. Когда необходимо переместить самоходного робота вверх или вниз по ярусам на траектории, самоходный робот транспортируется на соответствующий этаж подъемной машиной.
В системе управления роботом, предложенной в варианте осуществления настоящего изобретения, на полу каждого яруса чердака для перемещения самоходного робота предусмотрен проход, и с ним связана подъемная машина, вследствие чего самоходный робот может перемещаться на каждом ярусе. Таким образом, повышается гибкость применения самоходного робота, можно выполнять различные операции в соответствии с фактическими требованиями, и нет необходимости устанавливать направляющие для шаттлов, что значительно снижает стоимость строительства.
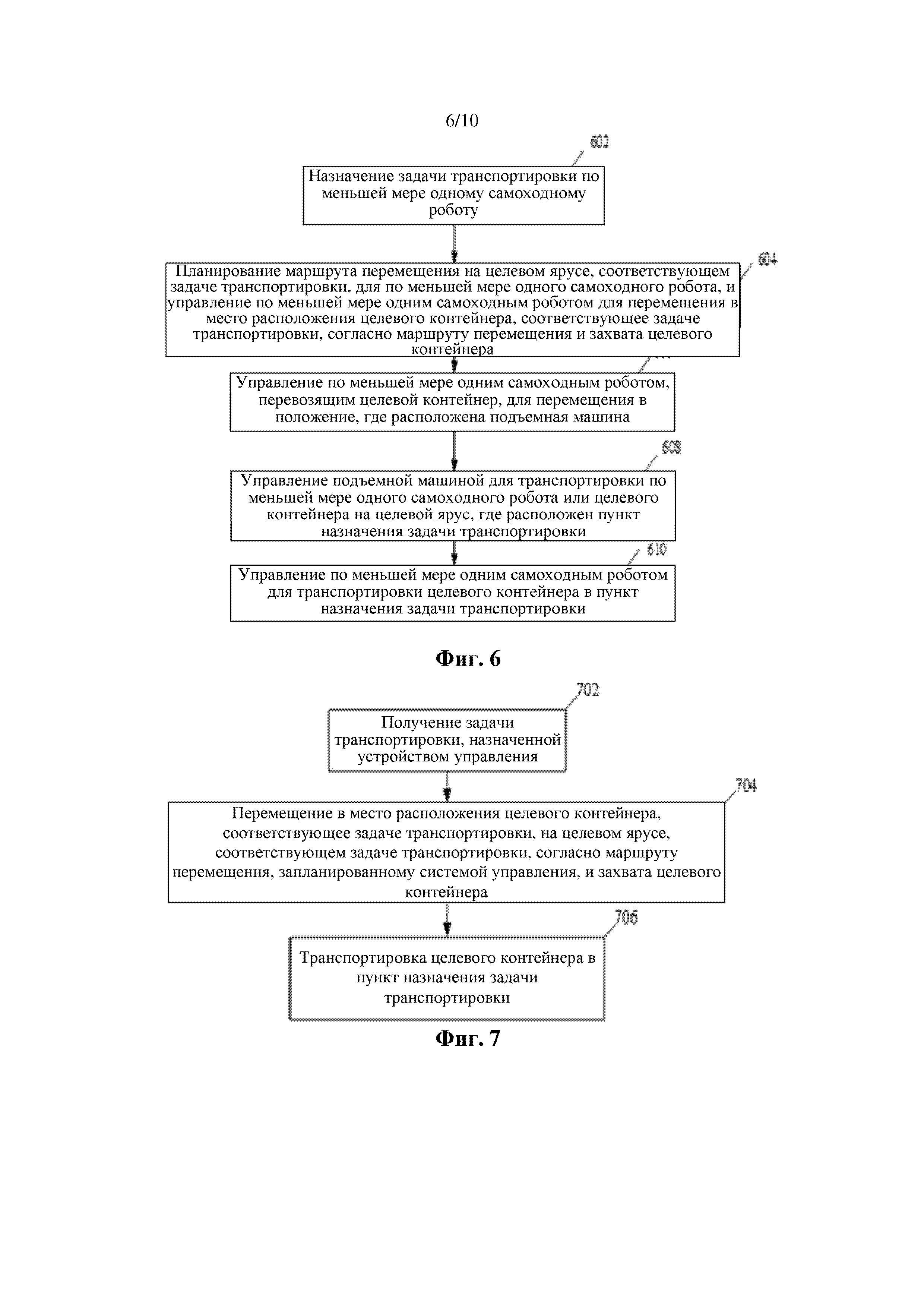
На фиг. 6 изображен способ управления роботом согласно одному варианту осуществления настоящего изобретения. Способ управления роботом применяется на стороне устройства управления и предусматривает стадии 6024510.
На стадии 602 задачу транспортировки назначают по меньшей мере одному самоходному роботу.
Согласно одному варианту осуществления настоящего изобретения задача транспортировки предусматривает наличие идентификационного кода целевого контейнера.
В практической реализации идентификационный код может представлять собой двумерный код или RFID-метку.
На стадии 604 маршрут перемещения на целевом ярусе, соответствующем задаче транспортировки, планируют для по меньшей мере одного самоходного робота, и управляют по меньшей мере одним самоходным роботом для перемещения в место расположения целевого контейнера, соответствующее задаче транспортировки, согласно маршруту перемещения для захвата целевого контейнера.
Согласно одному варианту осуществления настоящего изобретения область хранения содержит чердак, характеризующийся наличием по меньшей мере двух ярусов и приспособленный для хранения контейнера, и на полу каждого из по меньшей мере двух ярусов чердака предусмотрен проход для перемещения самоходного робота.
На стадии 606 управляют по меньшей мере одним самоходным роботом, перевозящим целевой контейнер, для перемещения в положение, где расположена подъемная машина.
Согласно одному варианту осуществления настоящего изобретения подъемная машина характеризуется наличием положения временного хранения, приспособленного для временного хранения по меньшей мере одного самоходного робота или целевого контейнера.
В процессе перемещения самоходного робота в положение временного хранения подъемной машины устройство управления может планировать оптимальный маршрут перемещения для по меньшей мере одного самоходного робота и управлять по меньшей мере одним самоходным роботом для перемещения согласно маршруту перемещения, чтобы избежать столкновения.
На стадии 608 подъемной машиной управляют для транспортировки по меньшей мере одного самоходного робота или целевого контейнера на целевой ярус, где расположен пункт назначения задачи транспортировки.
На стадии 610 по меньшей мере одним самоходным роботом управляют для транспортировки целевого контейнера в пункт назначения задачи транспортировки.
Согласно одному варианту осуществления настоящего изобретения задача транспортировки предусматривает наличие идентификационного кода целевого контейнера.
Устройство управления управляет по меньшей мере одним самоходным роботом для захвата целевого контейнера в результате распознавания идентификационного кода целевого контейнера.
Подъемная машина характеризуется наличием положения временного хранения, приспособленного для временного хранения по меньшей мере одного самоходного робота или целевого контейнера.
Согласно одному варианту осуществления задача транспортировки предусматривает первую задачу транспортировки, и пункт назначения первой задачи транспортировки предусматривает положение временного хранения подъемной машины. Устройство управления управляет первым самоходным роботом для прибытия по меньшей мере одного самоходного робота в место расположения целевого контейнера целевого яруса, соответствующего первой задаче транспортировки, согласно первому маршруту перемещения, соответствующему первой задаче транспортировки, для захвата целевого контейнера.
Согласно одному варианту осуществления задача транспортировки дополнительно предусматривает вторую задачу транспортировки, и пункт назначения второй задачи транспортировки предусматривает рабочий участок или отделение для хранения на стеллаже целевого яруса второй задачи транспортировки. Устройство управления принимает сигнал состояния готовности, переданный первым самоходным роботом. Устройство управления управляет подъемной машиной для транспортировки первого самоходного робота на целевой ярус второй задачи транспортировки. Устройство управления управляет первым самоходным роботом для перемещения по целевому ярусу второй задачи транспортировки согласно второму маршруту перемещения второй задачи транспортировки и транспортирует целевой контейнер на рабочий участок или в отделение для хранения на стеллаже целевого яруса второй задачи транспортировки.
Согласно другому варианту осуществления настоящего изобретения задача транспортировки предусматривает первую задачу транспортировки, и пункт назначения первой задачи транспортировки предусматривает положение временного хранения подъемной машины. Устройство управления управляет вторым самоходным роботом из по меньшей мере одного самоходного робота для прибытия в место расположения целевого контейнера целевого яруса, соответствующего первой задаче транспортировки, согласно первому маршруту перемещения, соответствующему первой задаче транспортировки, для захвата целевого контейнера, и управляет вторым самоходным роботом для транспортировки целевого контейнера в положение временного хранения подъемной машины.
Задача транспортировки дополнительно предусматривает вторую задачу транспортировки, и пункт назначения второй задачи транспортировки предусматривает рабочий участок или отделение для хранения на стеллаже целевого яруса второй задачи транспортировки. Устройство управления принимает сигнал состояния готовности, переданный вторым самоходным роботом. Устройство управления управляет подъемной машиной для транспортировки целевого контейнера на целевой ярус второй задачи транспортировки. Устройство управления управляет третьим самоходным роботом из по меньшей мере двух самоходных роботов для перемещения по целевому ярусу второй задачи транспортировки согласно второму маршруту перемещения второй задачи транспортировки и транспортирует целевой контейнер на рабочий участок или в отделение для хранения на стеллаже целевого яруса второй задачи транспортировки. Второй самоходный робот отличается от третьего самоходного робота.
Согласно другому варианту осуществления настоящего изобретения задача транспортировки дополнительно предусматривает третью задачу транспортировки, и пункт назначения третьей задачи транспортировки предусматривает рабочий участок целевого яруса третьей задачи транспортировки. Подъемная машина соединена с роликовой конвейерной линией рабочего участка. Устройство управления принимает сигнал состояния готовности, переданный вторым самоходным роботом, управляет подъемной машиной для транспортировки целевого контейнера на целевой ярус третьей задачи транспортировки, и управляет подъемной машиной для переноса целевого контейнера на роликовую конвейерную линию, посредством которой целевой контейнер перемещается на рабочий участок.
Согласно одному варианту осуществления устройство управления дополнительно управляет роликовой конвейерной линией для получения контейнера, с которым была осуществлена операция захвата.
Когда целевой контейнер расположен на роликовой конвейерной линии, устройство управления управляет подъемной машиной для захвата целевого контейнера с роликовой конвейерной линии, укладки целевого контейнера в положение временного хранения подъемной машины и транспортировки целевого контейнера на целевой ярус задачи транспортировки.
Согласно одному варианту осуществления настоящего изобретения устройство управления управляет по меньшей мере одним самоходным роботом для захвата целевого контейнера из положения временного хранения подъемной машины на целевом ярусе задачи транспортировки и транспортировки целевого контейнера в пункт назначения задачи транспортировки.
Согласно одному варианту осуществления настоящего изобретения устройство управления управляет по меньшей мере одним самоходным роботом, перевозящим целевой контейнер, для перемещения на рабочий участок и постановки в очередь на рабочем участке для ожидания заданной операции. Работа предусматривает такие работы, как вывоз со склада, инвентаризация или учет. После осуществления заданной операции по меньшей мере одним самоходным роботом управляют для перевозки целевого контейнера, с которым была осуществлена заданная операция.
Устройство управления может дополнительно управлять по меньшей мере одним самоходным роботом для выталкивания целевого контейнера на стеллаж временного хранения или роликовую конвейерную линию для временного хранения рабочего участка после того как по меньшей мере один самоходный робот перемещается на рабочий участок и получает по меньшей мере один пригодный к использованию контейнер, отличающийся от целевого контейнера.
Пункт назначения задачи транспортировки предусматривает отделение для хранения на стеллаже. Стадия, на которой устройство управления управляет по меньшей мере одним самоходным роботом для транспортировки целевого контейнера в пункт назначения задачи транспортировки, предусматривает стадии, описанные ниже. Принимают код целевого контейнера, с которым была осуществлена заданная операция, переданный самоходным роботом. Востребованность целевого контейнера оценивается согласно востребованности и количеству товаров, хранящихся в целевом контейнере, с которым была осуществлена заданная операция. Самоходным роботом управляют для транспортировки целевого контейнера, востребованность которого превышает заданное пороговое значение, в отделение для хранения на стеллаже в заданном участке, и взаимосвязь между целевым контейнером и отделением для хранения записывают; или самоходным роботом управляют для транспортировки контейнера в отделение для хранения на стеллаже за счет увеличения расстояния от рабочего участка согласно порядку по убыванию востребованности контейнера, и взаимосвязь между контейнером и отделением для хранения записывают.
В способе управления роботом, предложенном согласно варианту осуществления настоящего изобретения, предусмотрена подъемная машина, вследствие чего самоходным роботом можно управлять для перемещения по проходу для перемещения самоходного робота, предусмотренному на полу каждого яруса чердака. Таким образом, значительно повышается гибкость применения самоходного робота, можно выполнять различные операции в соответствии с фактическими требованиями, и нет необходимости устанавливать направляющие для шаттлов, что значительно снижает стоимость строительства.
На фиг. 7 изображен другой способ управления роботом согласно одному варианту осуществления настоящего изобретения. Способ управления роботом применяется на сторону самоходного робота и предусматривает стадии 702-706.
На стадии 702 получают задачу транспортировки, назначенную устройством управления.
На стадии 704 самоходный робот перемещается в место расположения целевого контейнера, соответствующее задаче транспортировки, на целевом ярусе, соответствующем задаче транспортировки, согласно маршруту перемещения, запланированному устройством управления, для захвата целевого контейнера.
Целевой ярус представляет собой определенный этаж области хранения, характеризующийся наличием по меньшей мере двух ярусов чердака. Проход для перемещения самоходного робота предусмотрен на полу каждого из по меньшей мере двух ярусов чердака области хранения.
На стадии 706 целевой контейнер транспортируют в пункт назначения задачи транспортировки согласно маршруту перемещения.
Согласно одному варианту осуществления задача транспортировки предусматривает наличие идентификационного кода целевого контейнера; и самоходный робот захватывает целевой контейнер в результате распознавания идентификационного кода целевого контейнера.
Согласно одному варианту осуществления настоящего изобретения задача транспортировки предусматривает первую задачу транспортировки, и пункт назначения первой задачи транспортировки предусматривает положение временного хранения подъемной машины. Самоходный робот прибывает в место расположения целевого контейнера целевого яруса, соответствующего первой задаче транспортировки, согласно первому маршруту перемещения, соответствующему первой задаче транспортировки, для захвата целевого контейнера. Самоходный робот перевозит целевой контейнер для прибытия в положение временного хранения подъемной машины и передает сигнал состояния готовности на устройство управления.
Задача транспортировки дополнительно предусматривает вторую задачу транспортировки, и пункт назначения второй задачи транспортировки предусматривает рабочий участок или отделение для хранения на стеллаже целевого яруса второй задачи транспортировки. Самоходный робот перевозит целевой контейнер для прибытия на целевой ярус второй задачи транспортировки посредством подъемной машины. Самоходный робот перемещается на целевом ярусе второй задачи транспортировки согласно второму маршруту перемещения второй задачи транспортировки и транспортирует целевой контейнер на рабочий участок или отделение для хранения на стеллаже целевого яруса второй задачи транспортировки.
Согласно одному варианту осуществления настоящего изобретения задача транспортировки предусматривает первую задачу транспортировки, и пункт назначения первой задачи транспортировки предусматривает положение временного хранения подъемной машины. Самоходный робот прибывает в место расположения целевого контейнера целевого яруса, соответствующего первой задаче транспортировки, согласно первому маршруту перемещения, соответствующему первой задаче транспортировки, для захвата целевого контейнера. Самоходный робот перевозит целевой контейнер в положение временного хранения подъемной машины и передает сигнал состояния готовности на устройство управления.
Согласно одному варианту осуществления настоящего изобретения задача транспортировки предусматривает вторую задачу транспортировки, пункт назначения второй задачи транспортировки предусматривает рабочий участок или отделение для хранения на стеллаже целевого яруса второй задачи транспортировки, и место расположения целевого контейнера второй задачи транспортировки представляет собой положение временного хранения подъемной машины. Целевой контейнер второй задачи транспортировки получают из положения временного хранения подъемной машины, и самоходный робот, расположенный на целевом ярусе второй задачи транспортировки, захватывает целевой контейнер второй задачи транспортировки из положения временного хранения подъемной машины. Самоходный робот перемещается на целевом ярусе второй задачи транспортировки согласно второму маршруту перемещения второй задачи транспортировки и транспортирует целевой контейнер на рабочий участок или отделение для хранения на стеллаже целевого яруса второй задачи транспортировки.
Самоходный робот, перевозящий целевой контейнер, перемещается на рабочий участок и становится в очередь на рабочем участке для ожидания операции захвата. После осуществления операции захвата самоходный робот перевозит целевой контейнер, с которым была осуществлена операция захвата, и транспортирует целевой контейнер на следующий рабочий участок или возвращает целевой контейнер на стеллаж.
Самоходный робот выталкивает целевой контейнер на стеллаж временного хранения или роликовую конвейерную линию для временного хранения рабочего участка и получает по меньшей мере один пригодный к использованию контейнер посредством установленного захватного телескопического механизма.
Согласно одному варианту осуществления настоящего изобретения пункт назначения задачи транспортировки предусматривает отделение для хранения на стеллаже. Стадия транспортировки целевого контейнера в пункт назначения задачи транспортировки предусматривает стадии, описанные ниже. Самоходный робот обнаруживает код контейнера, с которым была осуществлена операция захвата, и передает код на устройство управления. Контейнер, в котором находятся товары и востребованность которого превышает заданное пороговое значение, транспортируют в отделение для хранения на стеллаже в заданном участке; или контейнер транспортируют в отделение для хранения на стеллаже за счет увеличения расстояния от рабочего участка согласно порядку по убыванию востребованности контейнеров.
В способе управления роботом, предложенном согласно варианту осуществления настоящего изобретения, предусмотрена подъемная машина, вследствие чего самоходный робот может перемещаться по проходу для перемещения самоходного робота, предусмотренному на полу каждого яруса чердака. Таким образом, значительно повышается гибкость применения самоходного робота, можно выполнять различные операции в соответствии с фактическими требованиями, и нет необходимости устанавливать направляющие для шаттлов, что значительно снижает стоимость строительства.
На фиг. 8 и фиг. 13 показана система управления роботом согласно одному варианту осуществления настоящего изобретения. Система управления роботом содержит область хранения, контейнер 101, самоходного робота 103, подъемная машина 1041 для контейнеров, устройство 105 управления и механизм 108 для временного хранения.
Область хранения содержит по меньшей мере два яруса чердака 107 и приспособлена для хранения контейнера 101, и проход для перемещения самоходного робота 103 предусмотрен на полу чердака 107. Каждый ярус чердака 107 характеризуется наличием по меньшей мере одного самоходного робота 103 и по меньшей мере одного механизма 108 для временного хранения.
Согласно варианту осуществления настоящего изобретения контейнер 101 может представлять собой складскую тару или контейнер 101 на несущей конструкции для контейнеров, поддон на несущей конструкции для контейнеров или другие контейнеры, которые могут использоваться для хранения предметов. Самоходный робот 103 перемещается по ярусу, где расположен самоходный робот 103, и получает один или несколько контейнеров 101 посредством перемещения по проходу для самоходного робота 103. В то же время, рабочие могут работать в проходе чердака 107, то есть рабочий участок 106 может быть предусмотрен на каждом ярусе чердака 107 для выполнения таких операций, как операция захвата, операция инвентаризации, операция захвата товара или операция учета, в отношении контейнера 101.
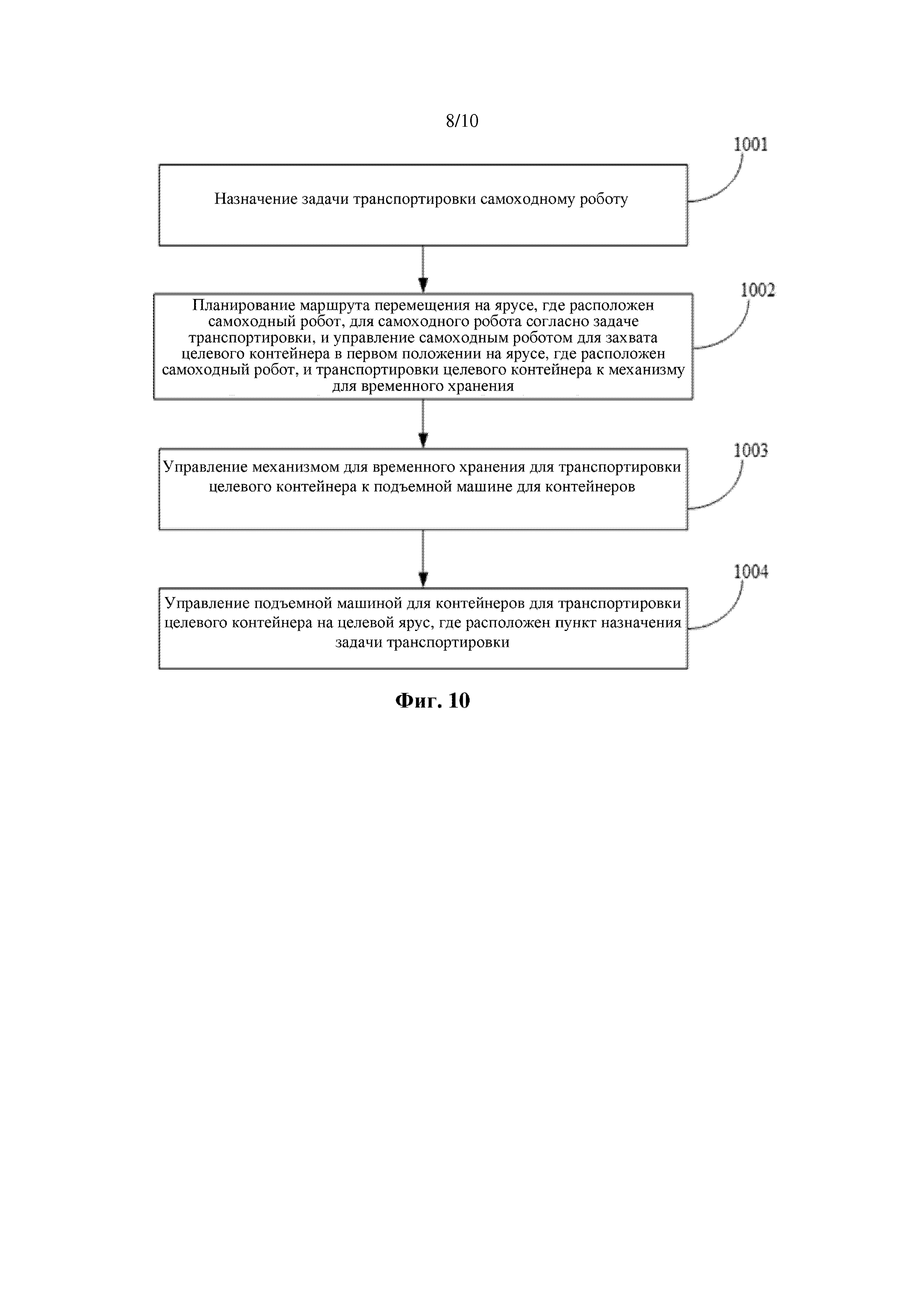
Устройство 105 управления выполнено с возможностью назначения задачи транспортировки самоходному роботу 103 и планирования маршрута перемещения на ярусе для самоходного робота 103 согласно задаче транспортировки, и отдачи команды самоходному роботу 103 на перемещение согласно маршруту перемещения и выполнения задачи транспортировки.
Устройство 105 управления дополнительно выполнено с возможностью назначения задачи транспортировки самоходному роботу 103 и планирования маршрута перемещения на ярусе для самоходного робота 103 согласно задаче транспортировки, и управления самоходным роботом 103 для перемещения на ярусе, где расположен самоходный робот 103, согласно маршруту перемещения и выполнения задачи транспортировки. Задача транспортировки предусматривает, что самоходный робот 103 захватывает целевой контейнер в первом целевом положении яруса, на котором расположен самоходный робот 103, и транспортирует целевой контейнер к механизму 108 для временного хранения; и/или самоходный робот 103 захватывает целевой контейнер на механизме 108 для временного хранения и транспортирует целевой контейнер во второе целевое положение яруса, где расположен самоходный робот 103. Первое целевое положение относится к положению целевого контейнера, когда самоходный робот 103 захватывает целевой контейнер согласно задаче транспортировки. Второе целевое положение относится к положению целевого контейнера, когда самоходный робот 103 укладывает целевой контейнер согласно задаче транспортировки. Первое целевое положение может быть таким же, как второе целевое положение, или отличаться от него.
Согласно варианту осуществления настоящего изобретения устройство 105 управления может хранить взаимное соответствие между контейнером 101 и местом для хранения на несущей конструкции для контейнеров чердака 107 и инвентарной информацией несущей конструкции для контейнеров чердака 107, вследствие чего происходит создание задачи транспортировки согласно документу, которая подлежит выполнению, и выделение самоходного робота 103 для выполнения задачи транспортировки. В то же время, устройство 105 управления может дополнительно планировать траекторию и отдавать команду самоходному роботу 103 следовать траектории, чтобы избежать столкновения. Устройство 105 управления соединено с возможностью связи с подъемной машиной 1041 для контейнеров, механизмом 108 для временного хранения и самоходным роботом 103 таким образом, что самоходный робот 103 состыкован с механизмом 108 для временного хранения, а механизм 108 для временного хранения состыкован с подъемной машиной 1041 для контейнеров.
Механизм 108 для временного хранения выполнен с возможностью поддержки целевого контейнера, перемещения целевого контейнера к подъемной машине 1041 для контейнеров и/или переноса целевого контейнера в сторону от подъемной машины 1041 для контейнеров. Подъемная машина 1041 для контейнеров выполнена с возможностью транспортировки целевого контейнера на целевой ярус, соответствующий задаче транспортировки.
Согласно одному варианту осуществления настоящего изобретения определенный ярус А характеризуется наличием одного самоходного робота В и одного механизма для временного хранения С.Устройство управления может управлять самоходным роботом В для захвата целевого контейнера в первом целевом положении яруса А, транспортировки целевого контейнера к механизму для временного хранения С для хранения, а затем устройство управления может управлять механизмом для временного хранения С для перемещения целевого контейнера к подъемной машине для контейнеров. Когда другие контейнеры также транспортируются на ярус А посредством подъемная машина для контейнеров, устройство управления может дополнительно управлять механизмом для временного хранения С для перемещения целевого контейнера в сторону от подъемной машины для контейнеров и к механизму для временного хранения С, и управлять самоходным роботом А для захвата целевого контейнера на механизме для временного хранения С и транспортировки целевого контейнера во второе целевое положение контейнера.
Согласно варианту осуществления настоящего изобретения межуровневая транспортировка контейнера 101 достигается посредством подъемной машины 1041 для контейнеров, и подъемная машина 1041 для контейнеров взаимодействует с механизмом 108 для временного хранения для стыковки с самоходным роботом 103. Например, после того как самоходный робот 103 захватывает целевой контейнер, устройство 105 управления отдает команду самоходному роботу 103 на перенос целевого контейнера к механизму 108 для временного хранения, механизм 108 для временного хранения транспортирует целевой контейнер к подъемной машине 1041 для контейнеров, и после того как подъемная машина 1041 для контейнеров транспортирует целевой контейнер на целевой ярус, целевой контейнер переносится к соответствующему механизму 108 для временного хранения и ожидает, что он будет подобран соответствующим самоходным роботом 103.
Согласно одному варианту осуществления механизм 108 для временного хранения может представлять собой роликовый транспортер, такой как направляющие или конвейерные ленты, и механизм 108 для временного хранения характеризуется иерархической структурой с показателем п. Устройство 105 управления дополнительно выполнено с возможностью управления подъемной машиной 1041 для контейнеров для транспортировки целевого контейнера относительно иерархии простоя в механизме 108 для временного хранения, где n - это натуральное число, и n больше или равно 2. Количество иерархий механизма 108 для временного хранения может быть разработано и отрегулировано в соответствии с ситуацией обслуживания.
Согласно одному варианту осуществления, как показано на фиг. 8 и фиг. 13, механизм для временного хранения расположен на одной или двух сторонах подъемной машины 1041 для контейнеров, и подъемная машина 1041 для контейнеров расположена в соответствии с механизмом для временного хранения. В случае если механизм для временного хранения расположен на двух сторонах подъемной машины для контейнеров, механизм для временного хранения, расположенный на одной стороне подъемной машина 1041 для контейнеров, выполнен с возможностью подачи контейнера 101 в подъемную машину 1041 для контейнеров; и механизм для временного хранения, расположенный на другой стороне подъемной машины 1041 для контейнеров, выполнен с возможностью выгрузки контейнера 101 из подъемной машины 1041 для контейнеров, причем операция подачи и операция выгрузки могут осуществляться последовательно или одновременно.
Согласно одному варианту осуществления подъемная машина 1041 для контейнеров содержит механизм переноса и временное положение для контейнера. Механизм переноса выполнен с возможностью загрузки целевого контейнера с механизма для временного хранения во временное положение для контейнера и/или загрузки целевого контейнера во временном положении для контейнера в механизм для временного хранения.
Согласно одному варианту осуществления механизм переноса содержит роликовый механизм или роботизированную руку, и роликовый механизм или роботизированная рука характеризуются степенью свободы в четырех направлениях: вперед, назад, влево и вправо в горизонтальной плоскости, вследствие чего подъемная машина 1041 для контейнеров может стыковаться с механизмом 108 для временного хранения в нескольких направлениях.
Рабочий процесс варианта осуществления настоящего изобретения описан ниже. Под управлением устройства 105 управления самоходный робот 103 получает контейнер 101, который подлежит транспортировке по этажам на другой этаж. Согласно таким факторам, как этаж, на который должен попасть контейнер 101, оптимальная траектория самоходного робота 103 для подъемной машины 1041 для контейнеров и положение в очереди самоходного робота 103 перед подъемной машиной 1041 для контейнеров, устройство 105 управления выделяет самоходного робота 103 для механизма 108 для временного хранения, состыкованного с соответствующей подъемной машиной 1041 для контейнеров, вследствие чего по меньшей мере один контейнер 101 последовательно подается в соответствующую подъемную машину 1041 для контейнеров. Когда по меньшей мере один контейнер 101 поднимается на целевой ярус, механизм 108 для временного хранения выгружает контейнер 101 из подъемной машины 1041 для контейнеров и временно хранит контейнер 101. Устройство 105 управления повторно выделяет самоходного робота 103 для механизма 108 для временного хранения для выгрузки контейнера 101 и транспортировки контейнера 101 на рабочий участок 106 области хранения для подбора. После осуществления подбора реализуется межуровневый возврат контейнера 101 согласно вышеупомянутому режиму.
В системе управления роботом, предложенной согласно варианту осуществления настоящего изобретения, задача подбора «товары к человеку» в трехмерном хранилище решается за счет использования самоходного робота 103 в комбинации со стеллажом на чердаке. Проход для перемещения самоходного робота 103 предусмотрен на полу каждого яруса чердака 107, и подъемная машина 1041 для контейнеров предусмотрена для транспортировки целевого контейнера на каждый целевой этаж, вследствие чего самоходный робот может перемещаться по каждому ярусу, что повышает эффективность склада в контексте межуровневой логистики. Механизм 108 для временного хранения, состыкованный с самоходным роботом 103, расположен в положении подъемной машины 1041 для контейнеров, вследствие чего подъемная машина 1041 для контейнеров также может нормально работать при условии, что ни один самоходный робот 103 не находится во временном бездействии, и межуровневое перемещение контейнеров 101 с разных ярусов достигается гибким и эффективным образом, тем самым повышая эффективность и гибкость всей роботизированной системы подбора и снижая затраты, связанные со схемой межуровневого перемещения контейнеров.
На фиг. 2 показана схема связи устройства управления роботом согласно одному варианту осуществления настоящего изобретения.
Компоненты устройства 105 управления включают, без ограничения, запоминающее устройство 210 и процессор 220. Процессор 220 соединен с запоминающим устройством 210 посредством шины 230, и база 250 данных используется для хранения задачи транспортировки.
Устройство 105 управления дополнительно содержит устройство 240 доступа, которое позволяет устройству 105 управления осуществлять связь через одну или несколько сетей 260. Примеры сетей включают телефонную сеть общего пользования (PSTN), локальную сеть (LAN), глобальную сеть (WAN), персональную сеть (PAN) или комбинацию сетей связи, такую как Интернет. Устройство 240 доступа может содержать один или несколько сетевых интерфейсов любого типа (например, сетевую интерфейсную карту (NIC)) проводного или беспроводного подключения, например, беспроводной интерфейс беспроводных локальных сетей (WLAN) IEEE 802.11, интерфейса технологии широкополосного доступа в микроволновом диапазоне (Wi-MAX), интерфейса Ethernet, интерфейса универсальной последовательной шины (USB), интерфейса сотовой сети, интерфейса Bluetooth и интерфейса беспроводной связи ближнего радиуса действия (NFC).
Согласно одному варианту осуществления настоящего изобретения вышеупомянутое устройство 105 управления и другие компоненты, не показанные на фиг. 2, также могут быть соединены друг с другом, например, посредством шины.
Устройство 105 управления может быть стационарным или мобильным вычислительным устройством любого типа, включая мобильный компьютер или мобильное вычислительное устройство (например, планшетный компьютер, персональный цифровой ассистент, портативный компьютер, ноутбук и нетбук), мобильный телефон (например, смартфон), носимое вычислительное устройство (например, умные часы и умные очки) или другие типы мобильных устройств, или стационарное вычислительное устройство, такое как настольный компьютер или персональный компьютер (PC). Устройство 105 управления также может представлять собой мобильный или стационарный сервер.
Устройство 105 управления соединено с возможностью связи с самоходным роботом 103 и подъемной машиной посредством сети 260 и управляет системой управления роботом за счет передачи управляющих инструкций или приема сообщения, возвращаемого самоходным роботом или подъемной машиной.
Согласно другому варианту осуществления настоящего изобретения задача транспортировки предусматривает наличие идентификационного кода целевого контейнера. Устройство 105 управления дополнительно выполнено с возможностью управления по меньшей мере одним самоходным роботом 103 для перемещения в место расположения целевого контейнера согласно маршруту перемещения на ярусе, где расположены самоходные роботы 103, и захвата целевого контейнера в результате проверки идентификационного кода целевого контейнера.
Следует отметить, что вариант осуществления настоящего изобретения не ограничивает конструкцию самоходного робота, причем снятие контейнера со стеллажа и укладка контейнера на стеллаж могут быть достигнуты посредством любой из конструкций, известных из уровня техники. Например, на самоходном роботе может быть расположена механическая рука, и механическая рука используется для снятия контейнера со стеллажа и укладки контейнера на стеллаж; зажимная конструкция также может быть расположена на самоходном роботе, и контейнер снимается со стеллажа и укладывается на стеллаж в зажатом состоянии; или контейнер может быть снят со стеллажа и уложен на стеллаж с использованием других конструкций. Например, как для примера показано на фиг. 3, согласно одному варианту осуществления настоящего изобретения по меньшей мере один самоходный робот 103 содержит захватный телескопический механизм 301, подъемный механизм 302 и шасси 303 для перемещения робота. Захватный телескопический механизм 301 выполнен с возможностью получения одного или нескольких целевых контейнеров. Подъемный механизм 302 выполнен с возможностью регулировки захватного телескопического механизма 301 для перемещения вверх или вниз таким образом, что захватный телескопический механизм получает целевые контейнеры со стеллажей на разной высоте целевого яруса.
Шасси 303 для перемещения робота выполнено с возможностью управления по меньшей мере одним самоходным роботом для перемещения по проходу для перемещения на ярусе, где расположен самоходный робот, согласно маршруту перемещения, запланированному устройством управления.
Целевой контейнер представляет собой контейнер 101, который подлежит транспортировке задачи транспортировки.
Самоходный робот 103, предложенный согласно варианту осуществления настоящего изобретения, перемещается по проходу для перемещения на полу чердака 102, вследствие чего гибкость транспортировки контейнера значительно повышается, можно выполнять различные операции в соответствии с фактическими требованиями, и нет необходимости устанавливать направляющие для шаттлов, что значительно снижает стоимость строительства.
Согласно другому варианту осуществления настоящего изобретения механизм 108 для временного хранения содержит первую роликовую конвейерную линию для временного хранения, вторую роликовую конвейерную линию для временного хранения и положение переноса, причем задача транспортировки предусматривает первую задачу транспортировки, и пункт назначения первой задачи транспортировки предусматривает положение переноса, соответствующее первой роликовой конвейерной линии для временного хранения. Устройство 105 управления дополнительно выполнено с возможностью управления первым самоходным роботом из по меньшей мере одного самоходного робота 103 для захвата целевого контейнера в месте расположения целевого контейнера яруса, где расположен целевой контейнер, согласно первому маршруту перемещения, соответствующему первой задаче транспортировки. Устройство 105 управления дополнительно выполнено с возможностью управления первым самоходным роботом для транспортировки целевого контейнера в положение переноса, соответствующее первой роликовой конвейерной линии для временного хранения. Первый самоходный робот выполнен с возможностью передачи сигнала состояния готовности на устройство 105 управления. Устройство 105 управления дополнительно выполнено с возможностью приема сигнала состояния готовности и управления первой роликовой конвейерной линией для временного хранения для транспортировки целевого контейнера к подъемной машине 1041 для контейнеров.
Задача транспортировки дополнительно предусматривает вторую задачу транспортировки, и пункт назначения второй задачи транспортировки предусматривает положение переноса, соответствующее второй роликовой конвейерной линии для временного хранения. Устройство 105 управления дополнительно выполнено с возможностью управления подъемной машиной 1041 для контейнеров для транспортировки целевого контейнера на целевой ярус второй задачи транспортировки. Устройство 105 управления дополнительно выполнено с возможностью управления подъемной машиной 1041 для контейнеров для транспортировки целевого контейнера в положение переноса, соответствующее второй роликовой конвейерной линии для временного хранения. Подъемная машина 1041 для контейнеров дополнительно выполнена с возможностью передачи сигнала состояния при ожидании получения товаров на устройство 105 управления.
Задача транспортировки дополнительно предусматривает третью задачу транспортировки, и пункт назначения третьей задачи транспортировки предусматривает рабочий участок 106 или несущую конструкцию для контейнеров целевого яруса второй задачи транспортировки. Устройство 105 управления дополнительно выполнено с возможностью приема сигнала состояния при ожидании получения товаров и управления вторым самоходным роботом из по меньшей мере одного самоходного робота 103 для перемещения на ярусе, где расположен второй самоходный робот, согласно третьему маршруту перемещения, соответствующему третьей задаче транспортировки. Устройство 105 управления дополнительно выполнено с возможностью управления вторым самоходным роботом для транспортировки целевого контейнера на рабочий участок 106 или несущую конструкцию для контейнеров целевого яруса второй задачи транспортировки из положения переноса, соответствующего второй роликовой конвейерной линии для временного хранения. Первый самоходный робот отличается от второго самоходного робота.
Согласно варианту осуществления настоящего изобретения задача транспортировки состоит из первой задачи транспортировки, второй задачи транспортировки и третьей задачи транспортировки. Первая роликовая конвейерная линия для временного хранения и вторая роликовая конвейерная линия для временного хранения соответствуют роликовой конвейерной линии для укладки ящиков для временного хранения для получения контейнера 101 и роликовой конвейерной линии для получения ящиков для временного хранения для временной хранения контейнера 101 соответственно. Положения переноса для стыковки с самоходными роботами расположены на роликовой конвейерной линии для получения ящиков для временного хранения и роликовой конвейерной линии для укладки ящиков для временного хранения. Процесс осуществления задачи транспортировки этого варианта осуществления описан ниже. Самоходный робот 103 транспортирует полученный контейнер 101 в положение переноса, соответствующее роликовой конвейерной линии для укладки ящиков для временного хранения. Роликовая конвейерная линия для укладки ящиков для временного хранения подает контейнер 101 в подъемную машину 1041 для контейнеров. После того как контейнер 101 прибывает на целевой ярус, подъемная машина 1041 для контейнеров переносит контейнер 101 на роликовую конвейерную линию для получения ящиков для временного хранения, причем роликовая конвейерная линия для получения ящиков для временного хранения может обладать многоуровневой формой. Устройство 105 управления может перемещать контейнер 101 в незанятый уровень согласно свободному состоянию роликовой конвейерной линии для получения ящиков для временного хранения. Устройство 105 управления управляет самоходным роботом 103 на целевом ярусе для перемещения на роликовую конвейерную линию для получения ящиков для временного хранения для выгрузки одного или нескольких контейнеров 101. Устройство 105 управления снова отдает команду самоходному роботу 103, который осуществил операцию получения ящика, транспортировать контейнер 101 на рабочий участок 106 на целевом ярусе.
Согласно варианту осуществления настоящего изобретения механизм для временного хранения дополнительно содержит третью роликовую конвейерную линию для временного хранения, и третья роликовая конвейерная линия для временного хранения и вторая роликовая конвейерная линия для временного хранения расположены с двух сторон подъемной машины 1041 для контейнеров соответственно. Задача транспортировки дополнительно предусматривает четвертую задачу транспортировки, и пункт назначения четвертой задачи транспортировки предусматривает целевой ярус четвертой задачи транспортировки.
Устройство 105 управления дополнительно выполнено с возможностью управления третьей роликовой конвейерной линией для временного хранения для транспортировки контейнера 101, расположенного в положении переноса третьей роликовой конвейерной линии для временного хранения, к подъемной машине 1041 для контейнеров.
Устройство 105 управления дополнительно выполнено с возможностью управления подъемной машиной 1041 для контейнеров для транспортировки контейнера 101 на целевой ярус четвертой задачи транспортировки.
Третья роликовая конвейерная линия для временного хранения соответствует роликовой конвейерной линии для укладки ящиков для временного хранения, используемой для получения контейнера 101. Операция подачи на роликовой конвейерной линии для укладки ящиков для временного хранения и операция выгрузки на роликовой конвейерной линии для получения ящиков для временного хранения могут осуществляться одновременно.
Согласно другому варианту осуществления настоящего изобретения область хранения содержит по меньшей мере один уровень хранения и один уровень подбора. Рабочий участок 106 расположен на уровне подбора и рабочий участок 106 приспособлен для выполнения заданной операции с целевым контейнером.
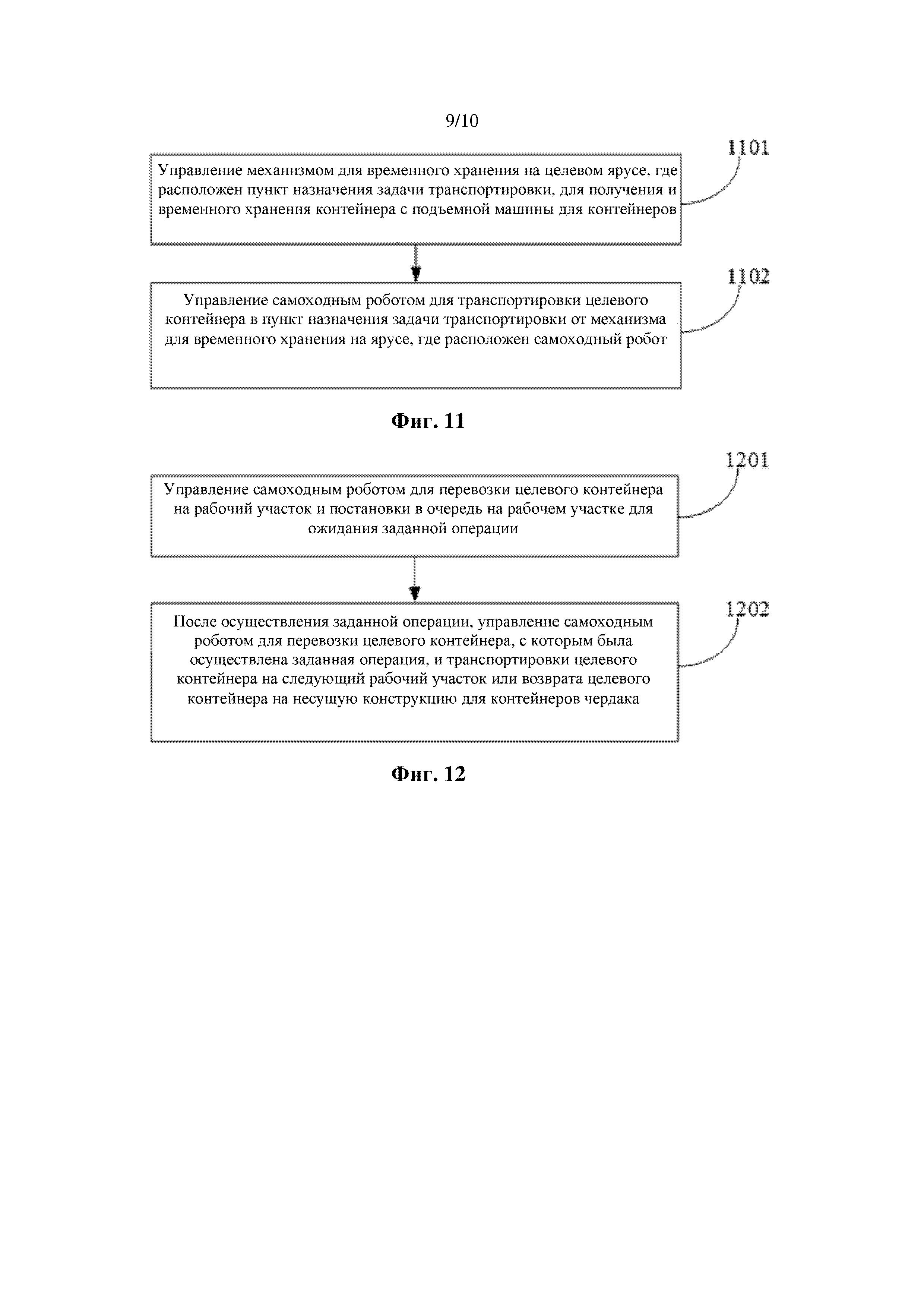
Согласно одному варианту осуществления устройство 105 управления дополнительно выполнено с возможностью управления самоходным роботом 103 для перевозки целевого контейнера на рабочий участок 106, и самоходный робот 103 становится в очередь на рабочем участке 106 для ожидания заданной операции. Устройство 105 управления дополнительно выполнено с возможностью, после осуществления заданной операции, управления самоходным роботом 103 для перевозки целевого контейнера, с которым была осуществлена заданная операция, и транспортировки целевого контейнера на следующий рабочий участок 106 или возврата целевого контейнера на несущую конструкцию для контейнеров чердака 107.
Согласно одному варианту осуществления для повышения рабочей эффективности самоходного робота 103 устройство 105 управления дополнительно выполнено с возможностью, после управления самоходным роботом 103 для прибытия на рабочий участок 106, управления самоходным роботом 103 для транспортировки целевого контейнера на несущую конструкцию для контейнеров рабочего участка 106 и получения по меньшей мере одного пригодного к использованию контейнера 101, отличающегося от целевого контейнера, за счет управления захватным телескопическим механизмом, расположенным на самоходном роботе 103.
Пригодный к использованию контейнер может представлять собой контейнер 101, в отношении которого была осуществлена заданная операция.
Согласно другому варианту осуществления настоящего изобретения устройство 105 управления дополнительно выполнено с возможностью приема кода целевого контейнера, идентифицированного самоходным роботом 103, и выполнения оценки востребованности для целевого контейнера на основании востребованности и количества товаров, хранящихся в целевом контейнере.
Устройство 105 управления дополнительно выполнено с возможностью управления самоходным роботом 103 для транспортировки целевого контейнера, востребованность которого превышает заданное пороговое значение, к несущей конструкции для контейнеров в заданном участке, и записи взаимосвязи между целевым контейнером и несущей конструкцией для контейнеров. Альтернативно устройство 105 управления дополнительно выполнено с возможностью управления самоходным роботом 103 для транспортировки целевого контейнера к несущей конструкции для контейнеров чердака 107 за счет увеличения расстояния от рабочего участка 106 чердака 107 согласно порядку по убыванию востребованности целевого контейнера, и записи взаимосвязи между целевым контейнером и несущей конструкцией для контейнеров.
Заданный участок может представлять собой участок, где расположено отделение для хранения, которое находится относительно близко к рабочему участку 106, например, он может представлять собой несущую конструкцию для контейнеров, находящуюся на расстоянии 3 метров или 5 метров от рабочего участка 106. Таким образом, контейнер 101, в котором расположены товары, которые часто берут и используют, хранится в несущей конструкции для контейнеров, которая находится относительно близко к рабочему участку, что сокращает время, необходимое для транспортировки, и повышает эффективность обработки.
Несущая конструкция для контейнеров представляет собой стеллаж, расположенный на каждом этаже чердака 107 области хранения, каждая несущая конструкция для контейнеров содержит множество отделений для хранения, и в каждом отделении для хранения может храниться один контейнер.
Согласно одному варианту осуществления несущая конструкция для контейнеров содержит, без ограничения, стеллажи для хранения, расположенные на каждом ярусе чердака 107 области хранения. Каждая несущая конструкция для контейнеров содержит множество отделений для хранения и в каждом отделении для хранения может храниться один контейнер.
Положение хранения рабочего участка предусматривает стеллаж для хранения или роликовый транспортер для временного хранения, и положение хранения используется для хранения контейнера на рабочем участке.
Согласно другому варианту осуществления настоящего изобретения проход для перемещения самоходного робота 103 может использоваться для работы вручную в аварийной ситуации.
Согласно другому варианту осуществления настоящего изобретения, как показано на фиг. 9, роботизированная система содержит подъемную машину 1042 для робота. Подъемная машина 1042 для робота выполнена с возможностью отправки самоходного робота 103 на соответствующий целевой ярус согласно управляющим инструкциям устройства 105 управления, когда рабочие объемы на разных целевых ярусах меняются.
Согласно варианту осуществления настоящего изобретения, как изображено на фиг. 9, последовательность операций схемы межуровневого перемещения контейнеров предусматривает следующие стадии.
На стадии (1) устройство 105 управления выделяет самоходного робота 103 на целевом ярусе для получения одного или нескольких целевых контейнеров в области хранения, и устройство 105 управления выделяет самоходного робота 103 для назначенной подъемной машины 1041 для контейнеров для выполнения операции временного хранения согласно положениям самоходного робота 103 и подъемной машины 1041 для контейнеров и положению в очереди самоходного робота 103.
На стадии (2), когда самоходный робот 103 прибывает в положение стыковки назначенной подъемной машины 1041 для контейнеров, если положение переноса роликовой конвейерной линии для укладки ящиков для временного хранения не занято, устройство 105 управления управляет самоходным роботом 103 для укладки целевого контейнера в положение переноса роликовой конвейерной линии для укладки ящиков для временного хранения, и роликовая конвейерная линия для укладки ящиков для временного хранения подает целевой контейнер в подъемную машину 1041 для контейнеров; и если положение переноса роликовой конвейерной линии для укладки ящиков для временного хранения занято, самоходный робот 103 ожидает инструкции по укладке ящика в положении переноса роликовой конвейерной линии для укладки ящиков для временного хранения.
На стадии (3), когда подъемная машина 1041 для контейнеров транспортирует целевой контейнер на целевой ярус, устройство 105 управления управляет устройством переноса для переноса целевого контейнера с подъемной машины 1041 для контейнеров к роликовой конвейерной линии для получения ящиков для временного хранения, и в то же время выделяет самоходного робота 103 для точки стыковки соответствующей подъемной машины 1041 для контейнеров для захвата целевого контейнера.
На стадии (4), после того как самоходный робот 103 захватывает целевой контейнер в положении переноса роликовой конвейерной линии для получения ящиков для временного хранения, самоходный робот 103 перемещается в место, назначенное устройством 105 управления, для выполнения назначенной операции.
На стадии (5), после осуществления назначенной операции, устройство 105 управления распределяет целевой контейнер обратно в его исходное положение, и целевой контейнер возвращается в исходное положение согласно стадиям 101-104.
На стадии (6), когда рабочие объемы разных целевых ярусов меняются, устройство 105 управления перераспределяет количество самоходных роботов 103 на каждом этаже, и самоходный робот 103 отправляет на назначенный целевой ярус посредством подъемной машины 1042 для роботов.
Кроме того, область хранения может быть дополнительно оснащена лестницей или лифтом.
В случае неполадок в системе, например, при сбое питания или если система не может работать нормально, рабочие выполняют задачу транспортировки по проходам для перемещения каждого яруса с помощью лестницы или лифта для осуществления работы вручную в аварийной ситуации.
Чтобы точно определить положение контейнера 101, контейнер 101 снабжен идентификационным кодом для идентификации, причем идентификационный код может представлять собой двумерный код, RFID-метку и т.п.
На основании системы эксплуатации робота, описанной выше, могут быть осуществлены различные бизнес-процессы. Процесс сдачи на хранение с полной загрузкой контейнера, процесс сдачи на хранение и последовательность операций рабочего участка 107 описаны в качестве примера ниже.
Процесс пополнения относится к тому, что товары не сдаются на хранение вместе с контейнером 101, а помещаются в существующий контейнер 101. Работа на рабочем участке 107 предусматривает такие работы, как вывоз со склада, инвентаризация или учет.
Согласно варианту осуществления настоящего изобретения процесс сдачи на хранение с полной загрузкой контейнера предусматривает стадии, описанные ниже.
На стадии (1) устройство 105 управления принимает номер контейнера, номер изделия и количество товаров и записывает а взаимосвязь между номером контейнера, номером изделия и количеством товаров и контейнером 101, причем с одним контейнером 101 могут быть связаны разные товары.
На стадии (2) устройство 105 управления определяет, что, если есть пустой контейнер на несущей конструкции для контейнеров в области хранения или механизме 108 для временного хранения, устройство управления выделяет самоходного робота 103 для получения пустого контейнера 101 и транспортировки пустого контейнера 101 на рабочий участок 106, и управляет самоходным роботом 103 для постановки в очередь на рабочем участке 106. Если на несущей конструкции для контейнеров в области хранения или механизме 108 для временного хранения нет пустого контейнера 101, устройство 105 управления непосредственно управляет самоходным роботом 103 для постановки в очередь на рабочем участке 106. Межуровневое перемещение контейнера 101 достигается посредством подъемной машины 1041 для контейнеров и механизма 108 для временного хранения на траектории транспортировки.
На стадии (3) самоходный робот 103 получает контейнер 101, обнаруживает идентификационный код контейнера 101 и отправляет идентификационный код на устройство 105 управления, и устройство 105 управления записывает номер контейнера, транспортируемого самоходным роботом 103.
На стадии (4) устройство 105 управления выделяет для контейнера 101 отделение для хранения на соответствующем стеллаже для контейнеров согласно востребованности и количеству товаров в контейнере 101.
На стадии (5), когда контейнеры 101 уложены во все положения временного хранения контейнеров самоходного робота 103, или не осталось контейнеров 101 для сдачи на хранение на рабочем участке 106, устройство 105 управления отдает команду самоходному роботу 103 покинуть рабочий участок 106 и планирует оптимальную последовательность траекторий для возврата контейнера для самоходного робота 103, и самоходный робот 103 последовательно перемещается в положения выделенных отделений для хранения и укладывает контейнер 101 в отделение для хранения. Межуровневое перемещение контейнера 101 достигается посредством подъемной машины 1041 для контейнеров и механизма 108 для временного хранения на траектории возврата.
Согласно варианту осуществления настоящего изобретения процесс пополнения предусматривает стадии, описанные ниже.
На стадии (1) устройство 105 управления выбирает множество контейнеров 101, в которых могут храниться товары, в соответствии с товарами, которые должны быть сданы на хранение. Множество контейнеров 101 могут представлять собой пустые контейнеры 101 или контейнеры 101, в которых находятся товары, но все еще есть пространство для хранения. Устройство 105 управления выделяет самоходного робота 103 для получения контейнера 101, транспортировки контейнера 101 на рабочий участок 106 и постановки в очередь на рабочем участке 106. Межуровневое перемещение контейнера 101 достигается посредством подъемной машины 1041 для контейнеров и механизма 108 для временного хранения на траектории транспортировки.
На стадии (2) устройство 105 управления принимает код изделия и код контейнера, записывает взаимосвязь между контейнером 101 и товарами, и управляет самоходным роботом 103 для получения товаров посредством контейнера 101.
На стадии (3) когда операция пополнения осуществляется в настоящее время на рабочем участке, или для контейнера 101, в настоящий момент перевозимого самоходным роботом 103, нет пространства для хранения, рабочие подают сигнал обратной связи через интерактивный интерфейс устройства 105 управления, и устройство 105 управления выделяет для контейнера 101 отделение для хранения на соответствующем стеллаже для контейнеров согласно востребованности и количеству товаров в контейнере 101.
На стадии (4) устройство 105 управления отдает команду самоходному роботу 103 покинуть рабочий участок 106 и планирует оптимальную последовательность траекторий возврата для самоходного робота 103. Самоходный робот 103 перемещается в положения отделений для хранения несущей конструкции для контейнеров, выделенных устройством 105 управления, и укладывает контейнер 101 в отделение для хранения несущей конструкции для контейнеров. Межуровневое перемещение контейнера 101 достигается посредством подъемной машины 1041 для контейнеров и механизма 108 для временного хранения на траектории возврата.
Согласно варианту осуществления настоящего изобретения последовательность операций рабочего участка 106 предусматривает стадии, описанные ниже.
На стадии (1) рабочий участок 106 начинает работу, и устройство 105 управления сверяет множество контейнеров 101 в соответствии с рабочим документом. Устройство 105 управления выделяет самоходного робота 103 для получения прошедших сверку контейнеров 101, транспортировки прошедших сверку контейнеров 101 на рабочий участок 106 согласно запланированной траектории транспортировки и постановки в очередь на рабочем участке 106. Межуровневое перемещение контейнера 101 достигается посредством подъемной машины 1041 для контейнеров и механизма 108 для временного хранения на траектории транспортировки.
На стадии (2) после осуществления работы на рабочем участке 106, информация о том, что операция с контейнером 101, который перевозится в настоящий момент самоходным роботом 103, осуществлена, подается обратно на устройство 105 управления посредством интерактивного интерфейса устройства 105 управления.
На стадии (3) устройство 105 управления выделяет для контейнера 101 отделение для хранения на соответствующей несущей конструкции для контейнеров согласно текущей востребованности и количеству товаров в контейнере 101.
На стадии (4) устройство 105 управления отдает команду самоходному роботу 103 покинуть рабочий участок 106 и планирует оптимальную последовательность траекторий возврата для самоходного робота 103. Самоходный робот 103 перемещается в положения отделений для хранения несущей конструкции для контейнеров, выделенных устройством 105 управления, и укладывает контейнер 101 в отделение для хранения несущей конструкции для контейнеров. Межуровневое перемещение контейнера 101 достигается посредством подъемной машины 1041 для контейнеров и механизма 108 для временного хранения на траектории возврата.
В системе управления роботом, предложенной в варианте осуществления настоящего изобретения, на полу каждого яруса чердака для перемещения самоходного робота 103 предусмотрен проход, и с ним связана подъемная машина, вследствие чего самоходный робот 103 может перемещаться на каждом ярусе. Таким образом, повышается гибкость применения самоходного робота 103, можно выполнять различные операции в соответствии с фактическими требованиями, и нет необходимости устанавливать направляющие для шаттлов, что значительно снижает стоимость строительства.
Процессор 220 может выполнять стадии способа, изображенного на фиг. 10. На фиг. 10 показана иллюстративная блок-схема способа управления роботом согласно одному варианту осуществления настоящего изобретения, и способ управления роботом предусматривает стадии 1001-1005.
На стадии 1001 задачу транспортировки назначают самоходному роботу.
На стадии 1002 планируют маршрут перемещения на ярусе, где расположен самоходный робот, для самоходного робота согласно задаче транспортировки, и самоходным роботом управляют для получения целевого контейнера в первом целевом положении на ярусе, где расположен самоходный робот, и транспортировки целевого контейнера к механизму 108 для временного хранения.
Согласно варианту осуществления настоящего изобретения задача транспортировки предусматривает наличие идентификационного кода целевого контейнера.
Стадия управления самоходным роботом для захвата целевого контейнера в первом целевом положении на ярусе, где расположен самоходный робот, предусматривает стадии, описанные ниже.
По меньшей мере одним самоходным роботом управляют для перемещения в место расположения целевого контейнера на ярусе, где расположен самоходный робот, согласно маршруту перемещения и захвата целевого контейнера в результате распознавания идентификационного кода целевого контейнера.
Согласно варианту осуществления настоящего изобретения задача транспортировки предусматривает первую задачу, и стадия управления самоходным роботом для захвата целевого контейнера в первом целевом положении на ярусе, где расположен самоходный робот, предусматривает стадию, описанную ниже. Первым самоходным роботом из по меньшей мере одного самоходного робота управляют для захвата целевого контейнера в месте расположения целевого контейнера на ярусе, где расположен самоходный робот, согласно первому маршруту перемещения, соответствующему первой задаче транспортировки.
Согласно варианту осуществления настоящего изобретения механизм для временного хранения представляет собой роликовый транспортер, механизм для временного хранения содержит первую роликовую конвейерную линию для временного хранения и положение переноса, и пункт назначения первой задачи транспортировки предусматривает положение переноса, соответствующее первой роликовой конвейерной линии для временного хранения.
Транспортировка целевого контейнера к механизму для временного хранения предусматривает управление первым самоходным роботом для транспортировки целевого контейнера в положение переноса, соответствующее первой роликовой конвейерной линии для временного хранения.
На стадии 1003 механизмом 108 для временного хранения управляют для транспортировки целевого контейнера к подъемной машине для контейнеров.
Управление механизмом для временного хранения для транспортировки целевого контейнера к подъемной машине для контейнеров предусматривает стадии, описанные ниже. Принимают сигнал состояния о том, что первый самоходный робот готов. Первой роликовой конвейерной линией для временного хранения управляют для транспортировки целевого контейнера к подъемной машине для контейнеров.
На стадии 1004 подъемной машиной для контейнеров управляют для транспортировки целевого контейнера на целевой ярус, где расположен пункт назначения задачи транспортировки.
Согласно варианту осуществления настоящего изобретения задача транспортировки дополнительно предусматривает вторую задачу транспортировки, и пункт назначения второй задачи транспортировки предусматривает целевой ярус второй задачи транспортировки. Управление подъемной машиной для контейнеров для транспортировки целевого контейнера на целевой ярус, где расположен пункт назначения задачи транспортировки, предусматривает стадию, описанную ниже. Подъемной машиной для контейнеров управляют для транспортировки целевого контейнера на целевой ярус второй задачи транспортировки.
Процессор 220 может выполнять стадии способа, изображенного на фиг. 11. На фиг. 11 показана иллюстративная блок-схема способа управления роботом согласно одному варианту осуществления настоящего изобретения, и способ управления роботом предусматривает стадии 1101-1102.
На стадии 1101 механизмом для временного хранения на целевом ярусе, где расположен пункт назначения задачи транспортировки, управляют для получения и временного хранения контейнера с подъемной машины для контейнеров.
Согласно варианту осуществления настоящего изобретения механизм для временного хранения представляет собой роликовый транспортер, и механизм для временного хранения содержит вторую роликовую конвейерную линию для временного хранения и положение переноса. Задача транспортировки дополнительно предусматривает вторую задачу транспортировки, и пункт назначения второй задачи транспортировки предусматривает положение переноса, соответствующее второй роликовой конвейерной линии для временного хранения. Управление механизмом для временного хранения на целевом ярусе, где расположен пункт назначения задачи транспортировки, для получения и временного хранения контейнера с подъемной машины для контейнеров предусматривает стадию, описанную ниже. Подъемной машиной для контейнеров управляют для транспортировки целевого контейнера в положение переноса, соответствующее второй роликовой конвейерной линии для временного хранения.
На стадии 1102 самоходным роботом управляют для транспортировки целевого контейнера в пункт назначения задачи транспортировки от механизма для временного хранения на ярусе, где расположен самоходный робот.
Согласно варианту осуществления настоящего изобретения задача транспортировки дополнительно предусматривает третью задачу транспортировки, и пункт назначения третьей задачи транспортировки предусматривает рабочий участок или несущую конструкцию для контейнеров целевого яруса второй задачи транспортировки.
Управление самоходным роботом для транспортировки целевого контейнера в пункт назначения задачи транспортировки от механизма для временного хранения на ярусе, где расположен самоходный робот, предусматривает стадии, описанные ниже. Принимают сигнал состояния при ожидании получения товаров. Вторым самоходным роботом из по меньшей мере одного самоходного робота управляют для перемещения на ярусе, где расположен второй самоходный робот, согласно третьему маршруту перемещения, соответствующему третьей задаче транспортировки. Вторым самоходным роботом управляют для транспортировки целевого контейнера на рабочий участок или несущую конструкцию для контейнеров целевого яруса второй задачи транспортировки из положения переноса, соответствующего второй роликовой конвейерной линии для временного хранения. Первый самоходный робот отличается от второго самоходного робота.
Согласно варианту осуществления настоящего изобретения механизм для временного хранения дополнительно содержит третью роликовую конвейерную линию для временного хранения, и третья роликовая конвейерная линия для временного хранения и вторая роликовая конвейерная линия для временного хранения расположены с двух сторон подъемной машины для контейнеров соответственно. Задача транспортировки дополнительно предусматривает четвертую задачу транспортировки, и пункт назначения четвертой задачи транспортировки предусматривает целевой ярус четвертой задачи транспортировки.
После того как подъемной машиной для контейнеров управляют для транспортировки целевого контейнера в положение переноса, соответствующее второй роликовой конвейерной линии для временного хранения, способ дополнительно предусматривает стадии, описанные ниже. Третьей роликовой конвейерной линией для временного хранения управляют для транспортировки контейнера в положении переноса третьей роликовой конвейерной линии для временного хранения к подъемной машине для контейнеров. Подъемной машиной для контейнеров управляют для транспортировки контейнера на целевой ярус четвертой задачи транспортировки.
Согласно варианту осуществления настоящего изобретения пункт назначения задачи транспортировки предусматривает несущую конструкцию для контейнеров чердака. Управление самоходным роботом для транспортировки целевого контейнера в пункт назначения задачи транспортировки от механизма для временного хранения на ярусе, где расположен самоходный робот, предусматривает стадии, описанные ниже. Принимают код целевого контейнера, который был подобран, переданный самоходным роботом. Востребованность целевого контейнера оценивают согласно востребованности и количеству товаров, хранящихся в целевом контейнере, который был подобран. Самоходным роботом управляют для транспортировки целевого контейнера, востребованность которого превышает заданное пороговое значение, к несущей конструкции для контейнеров в заданном участке, и взаимосвязь между целевым контейнером и несущей конструкцией для контейнеров записывают; или самоходным роботом управляют для транспортировки контейнера к несущей конструкции для контейнеров за счет увеличения расстояния от рабочего участка чердака согласно порядку по убыванию востребованности контейнера, и взаимосвязь между целевым контейнером и несущей конструкцией для контейнеров записывают.
Согласно варианту осуществления настоящего изобретения, как изображено на фиг. 12, после того как самоходным роботом управляют для транспортировки целевого контейнера в пункт назначения задачи транспортировки от механизма для временного хранения на ярусе, где расположен самоходный робот, способ дополнительно предусматривает стадии 1201-1202.
На стадии 1201 самоходным роботом управляют для перевозки целевого контейнера на рабочий участок и постановки в очередь на рабочем участке для ожидания заданной операции.
На стадии 1202, после осуществления заданной операции, самоходным роботом управляют для перевозки целевого контейнера, с которым была осуществлена заданная операция, и транспортировки целевого контейнера на следующий рабочий участок или возврата целевого контейнера на несущую конструкцию для контейнеров чердака.
Согласно варианту осуществления настоящего изобретения, после того как самоходным роботом управляют для транспортировки целевого контейнера в пункт назначения задачи транспортировки от механизма для временного хранения на ярусе, где расположен самоходный робот, способ дополнительно предусматривает стадию, описанную ниже. После того как самоходным роботом управляют для прибытия на рабочий участок, устройство управления управляет самоходным роботом для транспортировки целевого контейнера в положение хранения рабочего участка и получения одного или нескольких других пригодных к использованию контейнеров 101 за счет управления захватным телескопическим механизмом, расположенным на самоходном роботе.
Согласно способу управления роботом, предложенному согласно варианту осуществления настоящего изобретения, предусмотрена подъемная машина для контейнеров, вследствие чего подъемная машина для контейнеров может взаимодействовать с самоходным роботом 103 для перемещения по проходам для перемещения на разных ярусах. Таким образом, значительно повышается гибкость применения самоходного робота 103, можно выполнять различные операции в соответствии с фактическими требованиями, и нет необходимости устанавливать направляющие для шаттлов, что значительно снижает стоимость строительства.
Согласно одному варианту осуществления настоящего изобретения дополнительно предлагается вычислительное устройство, содержащее запоминающее устройство, процессор и компьютерные инструкции, хранящиеся в запоминающем устройстве и выполняемые на процессоре, и при исполнении компьютерных инструкций процессор реализует стадию вышеописанного способа управления роботом.
Согласно одному варианту осуществления настоящего изобретения дополнительно предлагается машиночитаемый носитель данных, на котором хранятся исполняемые компьютером инструкции. При исполнении исполняемых компьютером инструкций процессор реализует стадию вышеописанного способа управления роботом.
Выше приведена функциональная схема машиночитаемого носителя данных согласно этому варианту осуществления. Следует отметить, что техническая схема носителя данных относится к той же концепции, что и техническая схема вышеупомянутого способа управления роботом, и подробное содержание технической схемы носителя данных, которое подробно не описывается, может относиться к описанию технической схемы указанного выше способа управления роботом.
Выше описаны конкретные варианты осуществления настоящего изобретения. Другие варианты осуществления находятся в пределах объема приложенной формулы изобретения. В некоторых случаях действия или стадии, описанные в формуле изобретения, могут выполняться в порядке, отличающемся от порядка в вариантах осуществления, но желаемые результаты все еще могут быть достигнуты. Кроме того, процессы, изображенные на чертежах, не обязательно требуют показанного конкретного порядка или последовательного порядка для достижения желаемых результатов. Согласно некоторым вариантам осуществления также возможны или могут быть предпочтительны многозадачность и параллельная обработка.
Компьютерные инструкции предусматривают компьютерный процедурный код, и компьютерный процедурный код может быть представлен в таких формах, как исходный код, объектный код, исполняемый файл или некоторой промежуточной форме. Машиночитаемый носитель может включать любой объект или устройство, способное хранить компьютерный процедурный код, записывающий носитель, U-диск, мобильный жесткий диск, магнитный диск, оптический диск, компьютерное запоминающее устройство, постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), электрический несущий сигнал, телекоммуникационный сигнал, носитель для распространения программного обеспечения и т.п.Следует отметить, что содержимое, содержащееся на машиночитаемом носителе, может быть соответствующим образом увеличено или уменьшено в соответствии с требованиями законодательства и патентной практики в юрисдикциях, например, в некоторых юрисдикциях, в соответствии с законодательством и патентной практикой, причем машиночитаемый носитель не включает электрический несущий сигнал и телекоммуникационный сигнал.
Следует отметить, что для упрощения описания все вышеизложенные варианты осуществления способа выражены в виде серии комбинаций действий. Однако специалистам в данной области техники будет понятно, что настоящее изобретение не ограничивается описанными последовательностями действий, и согласно настоящему изобретению некоторые стадии могут выполняться в других последовательностях или одновременно. Кроме того, специалистам в данной области техники также должно быть понятно, что варианты осуществления, описанные в описании, являются иллюстративными вариантами осуществления и что задействованные действия и модули не обязательно необходимы для настоящего изобретения.
В вышеупомянутых вариантах осуществления описанию каждого варианта осуществления уделено отдельное внимание. Для части, которая не подробно описана в одном варианте осуществления, может быть сделана ссылка на соответствующее описание других вариантов осуществления.
Реферат
Система управления роботом содержит область хранения, подъемную машину, устройство управления и по меньшей мере один самоходный робот. Область хранения содержит чердак, характеризующийся наличием по меньшей мере двух ярусов и приспособленный для хранения контейнера, причем на полу каждого из по меньшей мере двух ярусов чердака предусмотрен проход для перемещения самоходного робота. Подъемная машина выполнена с возможностью транспортировки самоходного робота или контейнера на целевой ярус, соответствующий задаче транспортировки. Устройство управления выполнено с возможностью назначения задачи транспортировки самоходному роботу и планирования маршрута перемещения на целевом ярусе для самоходного робота согласно задаче транспортировки и отдачи команды самоходному роботу на перемещение согласно маршруту перемещения для выполнения задачи транспортировки. Технический результат заключается в снижении сложности транспортировки грузов и улучшении условий технического обслуживания системы. Предложены способ управления и вычислительное устройство. 3 н. и 13 з.п. ф-лы, 13 ил.
Комментарии