Устройство и способ определения точки касания муфты сцепления - RU2199448C2
Код документа: RU2199448C2
Чертежи



Описание
Изобретение относится к автоматическим средствам контроля муфты сцепления и, более определенно, к определению положения муфты сцепления для первоначальной передачи крутящего момента в автоматическом регуляторе муфты сцепления.
В последние годы наблюдается растущий интерес к расширению автоматизации контроля за приводной цепочкой в транспортных средствах, снабженных двигателем, и особенно к контролю за приводной цепочкой большегрузных самосвалов. Использование автоматических средств передачи в пассажирских автомобилях и грузовиках малой подъемности хорошо известно. Для обычной автоматической передачи в таком транспортном средстве используется гидротрансформатор и гидравлически управляемые шестерни с целью выбора конечного приводного соотношения между валом двигателя и ведущими колесами. Этот выбор шестерни основан на скорости двигателя, скорости транспортного средства и т.п. Хорошо известно, что такие автоматические средства трансмиссии снижают эффективность передачи мощности от двигателя к приводному валу вдобавок к значительному уменьшению экономии топлива и энергии по сравнению с квалифицированной операцией ручной трансмиссии. Такие гидравлические автоматические средства трансмиссии не получили широкого распространения в большегрузных самосвалах из-за снижения эффективности работы транспортного средства.
Одной из причин потери эффективности при использовании гидравлической автоматической трансмиссии является недостаток в функционировании гидротрансформатора. Обычный гидротрансформатор допускает проскальзывание и в результате этого потерю крутящего момента и мощности на всех режимах. В данной области известно использование гидротрансформаторов с блокирующей фрикционной муфтой, которая обеспечивает прямую связь между входным валом и выходным валом трансмиссии выше некоторых скоростей двигателя. Этот технический способ обеспечивает при зацеплении адекватную эффективность передачи крутящего момента, однако такой способ не увеличивает эффективность на низких скоростях.
Предлагалось устранить недостатки, присущие гидротрансформатору, путем замены автоматической фрикционной муфты. Эта замена влечет за собой другую проблему, не связанную с применением гидротрансформаторов. Применяемые фрикционные муфты демонстрируют значительное перемещение перед первоначальным зацеплением. Эта точка первоначального зацепления муфты называется точкой касания. Никакой крутящий момент не может быть передан посредством муфты для ее сцепления до точки касания. Регулятор муфты предпочтительно использует точку касания в качестве нулевого положения для алгоритма управления. Так как до точки касания не происходит никакой регулируемой передачи крутящего момента, регулятор муфты предпочтительно быстро перемещает муфту в эту точку при регулировании сцепления.
Следовательно, автоматическое включение фрикционной муфты обеспечивает надежный и автоматический способ определения точки касания муфты, что является преимуществом.
Это изобретение описывает автоматическое и надежное определение точки касания муфты, регулируемой автоматическим регулятором включения сцепления. Это изобретение используется в комбинации, включающей двигатель, фрикционную муфту, многоскоростную трансмиссию с нейтральной позицией, по меньшей мере, одно колесо силы сцепления с инерционной нагрузкой, соединенное с выходом многоскоростной передачи, и автоматический регулятор муфты.
Это изобретение позволяет определить точку касания в режиме холостого хода двигателя с трансмиссией в нейтральном положении и при инерционном тормозе. Инерционный тормоз обычно используется для замедления входного вала трансмиссии для выравнивания скоростей во время переключения коробки передач на более высокую передачу. Тормозной момент инерционного тормоза составляет примерно 5% крутящего момента в режиме холостого хода двигателя.
Регулятор автоматического включения муфты зацепляет муфту таким образом, что измеренная скорость передачи соответствует опорному сигналу скорости, меньшей чем скорость холостого хода. В предпочитаемом варианте опорный скоростной сигнал составляет 40-60% скорости холостого хода. Регулятор включения муфты предпочтительно вычитает пропущенный через фильтр измеренный входной скоростной сигнал передачи из опорного скоростного сигнала, прошедшего через фильтр, для предупреждения применения функционального ввода ступени передачи. Эта скорость с погрешностью используется для регулирования степени сцепления муфты. Это надежно обеспечивает степень сцепления муфты при незначительном крутящем моменте, совпадающем с тормозным моментом.
Это изобретение определяет, когда входная скорость передачи находится в пределах заранее определенной величины опорного сигнала скорости. В предпочитаемом варианте исполнения эта заранее определенная величина составляет 4% опорного сигнала скорости. Кроме выявления этих условий настоящее изобретение определяет точку касания муфты, соответствующую степени зацепления муфты. Эта степень зацепления муфты может быть представлена сигналом положения муфты или сигналом давления муфты, вырабатываемым вмонтированным датчиком, используемым для автоматического регулирования муфты. Если нет определенного сигнала зацепления муфты, эта степень зацепления муфты может быть сигналом зацепления муфты, используемым для регулирования степени зацепления муфты. Соответствующий степени зацепления муфты сигнал, желательно, пропускается через низкочастотный фильтр. Точка касания устанавливается как разница между этой степенью зацепления муфты для незначительного крутящего момента и смещением точки касания муфты. Это смещение точки касания муфты перемещает сигнал для того, чтобы учесть разницу в зацеплении муфты между зацеплением, которое обеспечивает незначительный крутящий момент для преодоления тормоза, и зацеплением, которое обеспечивает прежде всего ненулевой крутящий момент.
Эти и другие цели и преимущества настоящего изобретения будут описаны далее со ссылками на чертежи,
на которых:
фиг. 1 представляет схему приводной цепочки
транспортного средства, включающую регулятор включения муфты настоящего изобретения,
фиг. 2 изображает обычную взаимосвязь
между зацеплением муфты и крутящим моментом муфты,
фиг. 3
показывает схематично вариант определения точки касания муфты,
фиг. 4 представляет альтернативный вариант определения точки
касания муфты,
фиг. 5 графически иллюстрирует вариант по
фиг. 3,
фиг. 6 графически иллюстрирует третий вариант осуществления изобретения,
фиг. 7 показывает схематично
третий вариант определения точки касания муфты
Фиг. 1
представляет в схематичном виде приводную цепочку снабженного двигателем транспортного средства, включающую автоматический регулятор
включения муфты настоящего изобретения. Транспортное средство
включает двигатель 10 как источник движущей силы. Для большегрузного самосвала такого типа, к которому лучше всего подходит настоящее
изобретение, двигатель 10 является дизельным двигателем
внутреннего сгорания. Дроссель 11, который обычно представлен ножной педалью, регулирует функционирование двигателя 10 посредством дроссельного
фильтра 12. Дроссельный фильтр 12 пропускает сигнал
дросселя, поступающий к двигателю 10 путем подачи линейно изменяющегося дроссельного сигнала в ответ на увеличение сектора газа двигателя через
дроссель 11. Двигатель 10 создает крутящий момент на вал
15 двигателя. Датчик 13 скорости двигателя определяет скорость вращения вала 15 двигателя. Фактическое место определения скорости вращения с
помощью датчика скорости двигателя может находиться на
маховом колесе двигателя. Датчик 13 скорости двигателя, желательно, представляет собой колесо с множеством зубьев, чье вращение определяется
магнитным датчиком.
Фрикционная муфта 20 включает неподвижную пластину 21 и подвижную пластину 23, которые способны полностью или частично сцепляться. Неподвижная пластина 21 может быть включена в маховое колесо двигателя. Фрикционная муфта 20 связывает крутящий момент от вала 15 двигателя с входным валом 25 передачи, соответствующим степени сцепления между неподвижной пластиной 21 и подвижной пластиной 23. Следует отметить, что несмотря на то что фиг. 1 изображает только одну пару неподвижной и подвижной пластин, специалистам данной области будет ясно, что муфта 20 может включать множество пар таких пластин.
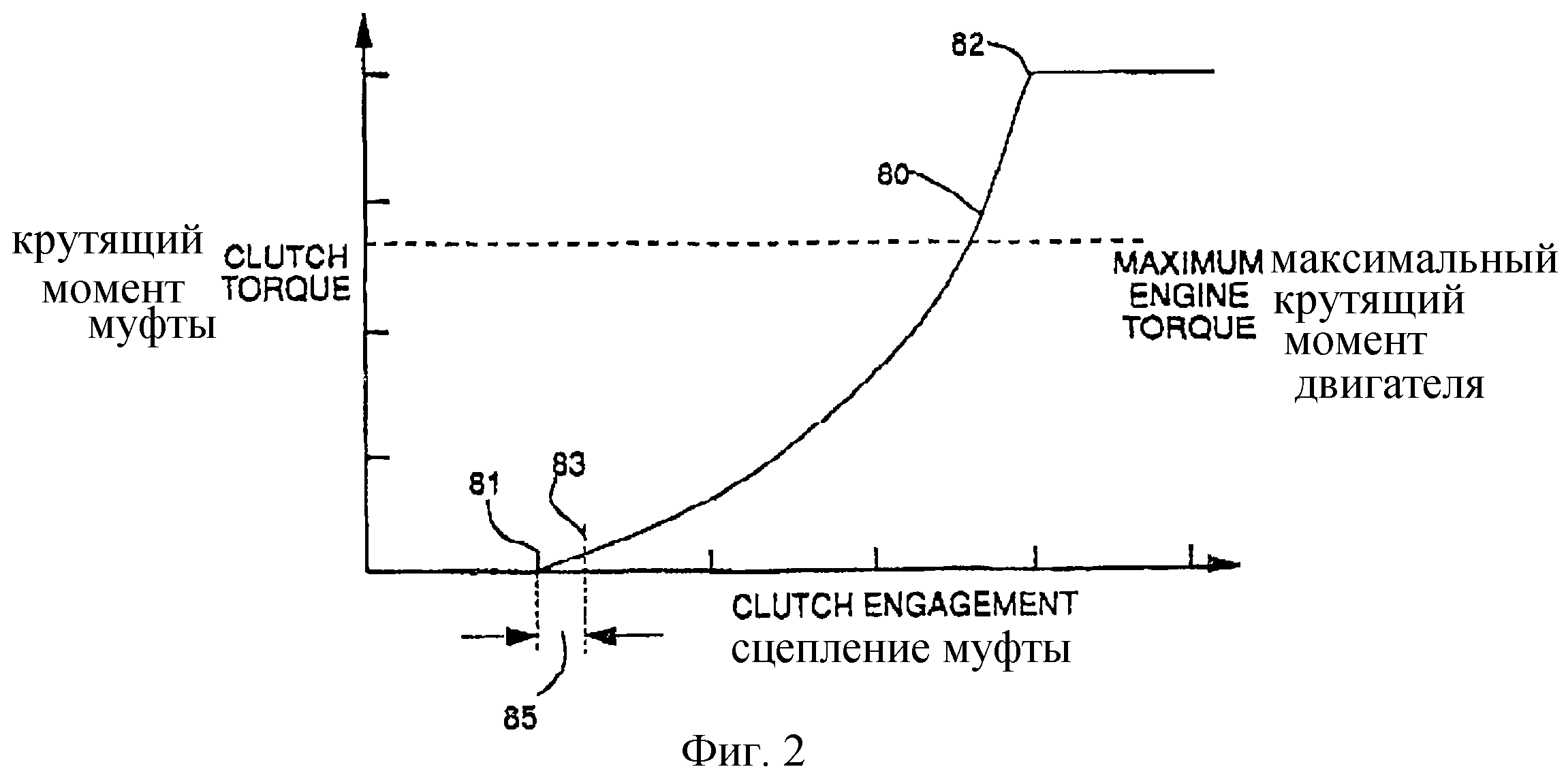
На фиг. 2 представлена обычная функция положения муфты гидротрансформатора. Кривая 80 крутящий момент муфты/положение первоначально равна нулю для диапазона зацеплений до начальной точки 81 касания. Крутящий момент муфты возрастает постепенно с увеличением зацепления муфты. В показанном на фиг. 2 примере крутящий момент муфты медленно возрастает сначала, а затем более круто до достижения максимального крутящего момента муфты при полном зацеплении в точке 82. Обычный дизайн муфты требует, чтобы максимальный крутящий момент муфты при полном зацеплении превышал максимальный крутящий момент двигателя примерно в 1,5 раза. Это гарантирует то, что муфта 20 может передавать максимальный крутящий момент двигателя 10 без проскальзывания.
Приводной механизм 27 муфты соединен с подвижной пластиной 23 для предупреждения расцепления муфты 20 через частичное сцепление до полного сцепления. Приводной механизм 27 муфты может быть электрическим, гидравлическим или пневматическим и может регулироваться по положению или давлению. Приводной механизм 27 муфты регулирует степень сцепления муфты в соответствии с сигналом сцепления муфты, поступающим от регулятора 60 включения муфты. Согласно предпочитаемому варианту исполнения приводной механизм 27 муфты представляет собой регулятор замкнутого контура. Приводной механизм 27 муфты регулирует степень сцепления муфты с тем, чтобы определенное положение муфты от датчика 29 положения муфты следовало за сигналом сцепления муфты. Определение точки касания предпочтительно использует определенное положение муфты от датчика 29 положения муфты. Специалистам данной области будет ясно, что приводной механизм 27 муфты может регулироваться с помощью давления посредством сигнала включения муфты, соответствующего желаемому давлению муфты, и использовать обратную связь давления муфты, измеренного датчиком давления муфты.
Датчик 31 входной скорости передачи измеряет скорость вращения входного передаточного вала 25, которая представляет собой входные данные к передаче 30. Передача 30 обеспечивает выборочные приводные соотношения для приводного вала 35 под контролем регулятора 33 смещения передачи. Приводной вал 35 соединен с дифференциальным механизмом 40. Датчик 37 выходной скорости передачи измеряет скорость вращения приводного вала 35. Датчик 31 входной скорости передачи и датчик 37 выходной скорости передачи предпочтительно сконструированы так же, как и датчик 13 скорости двигателя. В предпочитаемом варианте исполнения изобретения, где снабженное двигателем транспортное средство представлено большегрузным самосвалом, дифференциальный механизм 40 приводит в действие четыре полуоси 41-44, которые в свою очередь соединены с соответствующими колесами 51-54.
Регулятор 33 смещения передачи принимает входные сигналы от дросселя 11, датчика 13 скорости двигателя, датчика 31 входной скорости передачи и датчика 37 выходной скорости передачи. Регулятор 33 смещения передачи вырабатывает сигналы выборки шестерни для регулирования передачи 30 и сигналы сцепления/расцепления муфты, связанные с регулятором 60 включения муфты. Регулятор 33 смещения передачи предпочтительно изменяет конечное соотношение шестерен, обеспеченное передачей 30, соответствующей положению дросселя, скорости двигателя, входной скорости передачи и выходной скорости передачи. Регулятор 33 смещения передачи подает соответствующие сигналы сцепления и расцепления к регулятору 60 включения муфты в зависимости от того, сцеплена или расцеплена фрикционная муфта 20. Регулятор смещения передачи также передает сигнал шестерни к регулятору 60 включения муфты. Этот сигнал шестерни позволяет осуществить выборку коэффициентов, соответствующую выбранной шестерне. Регулятор 33 смещения передачи предпочтительно включает на короткое время инерционный тормоз 29 во время повышения передачи. Это замедляет скорость вращения передаточного входного вала 25 с тем, чтобы она совпала со скоростью приводного вала 35 до сцепления с более высокой шестерней. Определение точки касания согласно этому изобретению предпочтительно использует инерционный тормоз 29 так, как будет описано далее. Следует отметить, что регулятор 33 смещения передачи не является частью настоящего изобретения и его описание не будет представлено ниже.
Регулятор 60 включения муфты посылает сигнал сцепления муфты к приводному механизму 27 муфты с целью регулирования положения подвижной пластины 23. В результате этого регулируется величина крутящего момента, переданная муфтой 20 в соответствии с кривой 80 крутящий момент муфты/положение, представленной на фиг. 2. Регулятор 60 включения муфты функционирует под контролем регулятора 33 смещения передачи. Регулятор 60 включения муфты контролирует движение подвижной пластины 23 от расцепления до, по крайней мере, частичного сцепления или полного сцепления в ответ на получение сигнала сцепления от регулятора 33 смещения передачи. В предпочитаемом варианте исполнения предполагается, что сигнал сцепления муфты будет указывать желаемое положение муфты. Приводной механизм 27 муфты, предпочтительно, включает контрольную систему замкнутого контура, использующую измеренное положение муфты от датчика 29 положения муфты для регулирования подвижной пластины 23 до этого желаемого положения. Также возможно, что сигнал сцепления муфты может представлять желаемое давление муфты вместе с приводным механизмом 27 муфты, обеспечивающим контроль по замкнутому контуру за этим желаемым давлением. В зависимости от конкретного транспортного средства приводной механизм 27 муфты может функционировать в режиме открытого контура. Точное детальное описание приводного механизма 27 муфты не является существенным для данного изобретения и далее не будет обсуждаться.
Регулятор 60 включения муфты предпочтительно вырабатывает заранее определенный сигнал расцепления муфты в режиме открытого контура для быстрого расцепления муфты 20 в ответ на получение сигнала расцепления от регулятора 33 смещения передачи. Для такого заранее определенного расцепления муфты 20 в режиме открытого контура не предвидится никаких неблагоприятных колебательных ответных реакций.
Контрольная функция регулятора 60 включения муфты необходима только для положений муфты между точкой касания 81 и полным сцеплением. Сцепление муфты менее, чем сцепление, соответствующее точке 81 касания, не позволяет передачу крутящего момента, так как муфта 20 полностью расцеплена. Настоящее изобретение определяет способ выявления положения муфты, соответствующего точке 81 касания. В ответ на прием сигнала сцепления от регулятора 33 смещения передачи регулятор 60 включения муфты желательно быстро продвигает муфту 20 в точку, соответствующую точке 81 касания. Это равно нулевому контролю сцепления муфты в точке 81 касания. После этого сцепление муфты регулируется контрольной функцией регулятора 60 включения муфты.
Фиг. 3 представляет схематично определение точки касания для муфты 20. Этот способ представляет собой предпочтительно подмножество контрольной функции регулятора 60 включения муфты. Определение точки касания влечет за собой установление передачи 30 в нейтральной точке и использование инерционного тормоза 29. Муфта 20 постепенно зацепляется, пока двигатель 10 работает в режиме холостого хода, до тех пор пока входная скорость передачи не достигнет заранее определенного значения скорости холостого хода двигателя. Эта степень сцепления муфты, соответствующая точке 82 на фиг. 2, передает крутящий момент через муфту 20 для преодоления незначительного тормозного крутящего момента инерционного тормоза 29. Небольшое постоянное смещение 85 вычитается из этой степени сцепления муфты с целью определения точки 81 касания.
Процесс определения точки касания начинается с установления соответствующих исходных условий. Эти исходные условия включают холостой ход двигателя 10, передачу 30 в нейтральном и инерционном режиме зацепления тормоза 29. Инерционный тормоз 29 обычно способствует совпадению скорости вращения передаточного входного вала 25 со скоростью приводного вала 35 во время переключения передачи на более высокую передачу. Так как муфта 20 расцеплена во время смещения, необходимая величина торможения очень мала. Инерционный тормоз 29 нужен только для того, чтобы развить тормозной крутящий момент примерно на 5% от крутящего момента двигателя в режиме холостого хода.
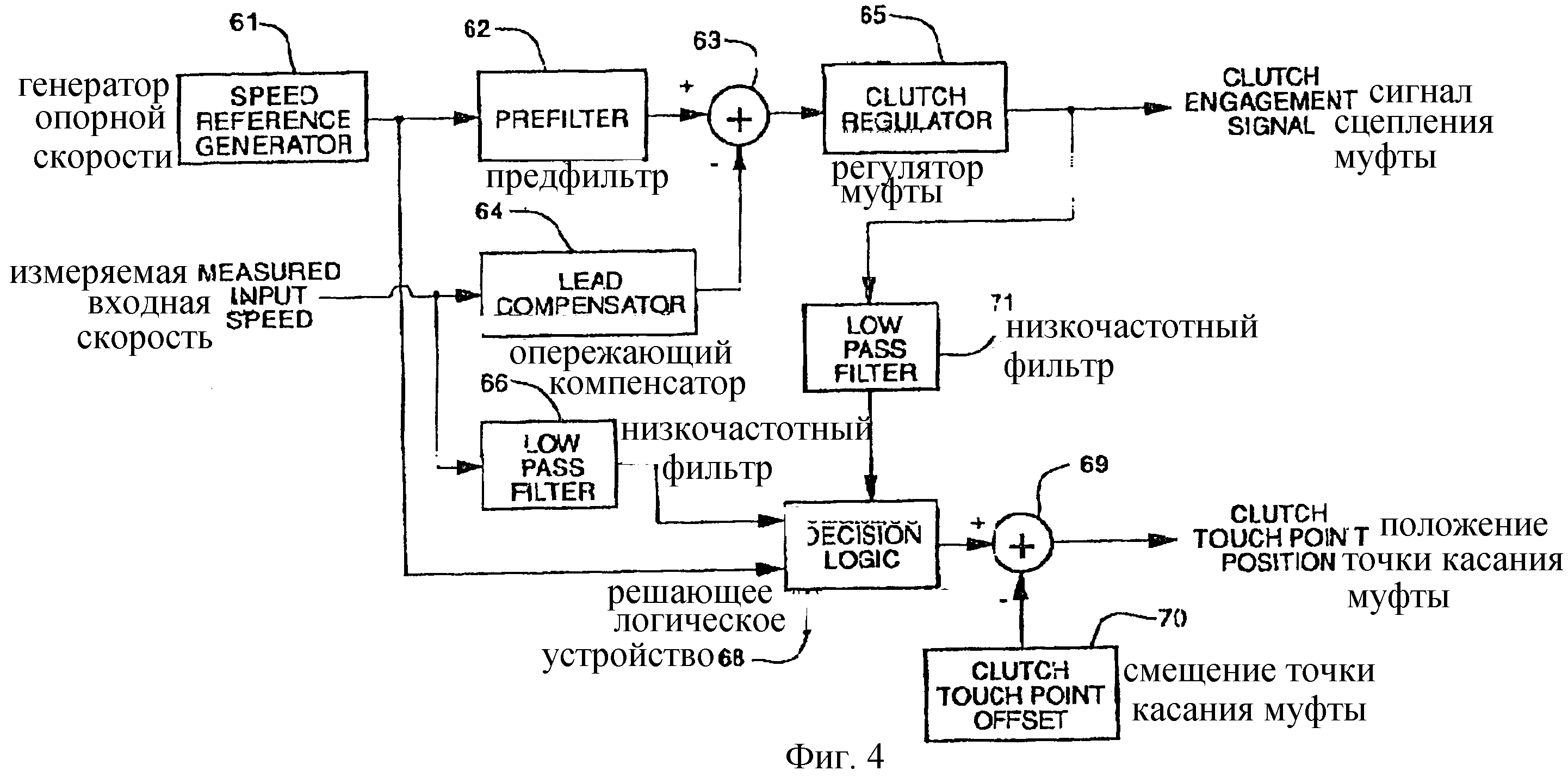
Скоростной опорный генератор 61 вырабатывает опорный скоростной сигнал. Этот опорный скоростной сигнал должен соответствовать примерно 40-60% скорости двигателя на холостом ходу. Этот опорный скоростной сигнал должен быть меньше, чем скорость холостого хода двигателя, так как определение точки касания требует проскальзывания муфты во время холостого хода двигателя. Опорный скоростной сигнал проходит через предварительный фильтр 62. Предфильтр 62 служит для предупреждения применения опорного скоростного сигнала ступени передачи к контрольному процессу.
В алгебраическом сумматоре 63 образуется сигнал погрешности скорости. Сигнал погрешности скорости представляет собой разность между опорным скоростным сигналом, прошедшим через предфильтр 62, и прошедшим через фильтр входным сигналом скорости. Датчик 31 входной скорости передачи вырабатывает входной сигнал скорости передачи, соответствующий скорости вращения передаточного входного вала 25. Компенсатор 64 опережения фильтрует входной сигнал скорости передачи до составления разницы.
Сигнал погрешности скорости направляет регулятор 65 муфты, который вырабатывает сигнал сцепления муфты для использования в приводном механизме 27 муфты. Это идентично функционированию регулятора 60 включения муфты во время повторного сцепления муфты 20, следующего за смещениями передачи. Приводной механизм 27 муфты зацепляет муфту 20 в соответствии со степенью, согласованной с сигналом включения муфты. Ввиду того что степень сцепления муфты определяет величину крутящего момента к передаточному входному валу 25 и, следовательно, измеряемую входную скорость передачи, образуется система обратной связи. Выбор опорного сигнала скорости меньше, чем скорость холостого хода двигателя, гарантирует то, что муфта 20 проскальзывает, когда сигнал погрешности скорости приведен к нулю. Величина крутящего момента, необходимого для преодоления тормозного крутящего момента инерционного тормоза 29, настолько незначительна, что она не задерживает двигатель 10.
Решающее логическое устройство 68 определяет точку касания. Решающее логическое устройство 68 принимает измеряемый сигнал входной скорости передачи, пропущенный через низкочастотный фильтр 66. Решающее логическое устройство 68 также принимает измеряемый сигнал положения муфты от датчика 29 положения муфты, прошедший через низкочастотный фильтр 67. Наконец, решающее логическое устройство 68 принимает опорный сигнал скорости от опорного генератора 61 скорости. Решающее логическое устройство 68 определяет, когда достигнуто устойчивое состояние, путем сравнения пропущенного через фильтр входного сигнала скорости с опорным сигналом скорости. Устойчивое состояние определяется как состояние, когда пропущенный через фильтр входной сигнал скорости заключен в пределах заранее определенной доли, т.е. 4%, опорного сигнала скорости. Когда это состояние достигнуто, решающее логическое устройство 68 определяет точку 83 как прошедший через фильтр измеряемый сигнал положения муфты.
Второй алгебраический сумматор 69 определяет положение муфты для точки 81 касания. Генератор 70 смещения точки касания муфты вырабатывает сигнал смещения точки касания муфты, соответствующий расстоянию 85, показанному на фиг. 2. Эта величина фиксируется для конкретного транспортного средства и зависит от кривой 80 крутящий момент муфты/положение и тормозного крутящего момента инерционного тормоза 29. В предпочитаемом варианте исполнения данного изобретения этот сигнал смещения точки касания муфты составляет 6,8% от полного пути муфты 20. Второй алгебраический сумматор 69 вырабатывает сигнал точки касания муфты, соответствующий разнице между прошедшим через фильтр измеряемым сигналом положения муфты от решающего логического устройства 68 и сигналом смещения точки касания муфты.
Фиг. 4 представляет альтернативный вариант исполнения настоящего изобретения. Этот альтернативный способ может быть использован, когда измерение степени сцепления муфты недоступно. Низкочастотный фильтр 71, аналогичный низкочастотному фильтру 67, представленному на фиг. 3, отделяет сигнал сцепления муфты от регулятора 65 муфты. Как только этот сигнал будет доступен и ввиду того, что приводной механизм 27 муфты обеспечивает сцепление муфты, соответствующее этому сигналу, он может быть использован как средство сцепления муфты. Решающее логическое устройство 68 определяет, когда прошедший через фильтр входной сигнал скорости находится в пределах 4% опорного сигнала скорости. Когда это состояние достигнуто, решающее логическое устройство 68 определяет точку 83 как прошедший через фильтр сигнал сцепления муфты. Другие части варианта исполнения, изображенного на фиг.4, функционируют в соответствии с предыдущим описанием фиг.3.
Регулятор 60 включения муфты, включая определение точки касания муфты, предпочтительно выполнен через схему микроконтроллера. Соответствующие скорости двигателя входные сигналы, входная скорость передачи, регулирование дросселя и положение муфты могут быть выражены в цифровой форме. Эти входные сигналы предпочтительно отбираются с частотой, совместимой с частотой функционирования микроконтроллера, и достаточно быстро для обеспечения нужного контроля. Как уже указывалось, скорость двигателя, входная скорость передачи и выходная скорость передачи предпочтительно определяются посредством колес с многочисленными зубцами, скорость вращения которых измеряется магнитными датчиками. Последовательности импульсов, выявленные магнитными датчиками, подсчитываются через заранее определенные интервалы. Соответствующие одиночные импульсы отсчета прямо пропорциональны измеряемой скорости. Для должного контроля знак входной скорости передачи может быть отрицательным, если транспортное средство движется назад. Необходим некоторый способ определения направления вращения приводного вала. Это выявление направления является традиционным и далее не будет обсуждаться. Установка дросселя и положение муфты предпочтительно определяются посредством аналоговых датчиков, таких как потенциометры. Эти аналоговые сигналы преобразовываются в цифровую форму через аналого-цифровой преобразователь для использования микроконтроллером. Микроконтроллер выполняет процессы, показанные на фиг. 3 и 4, посредством дискретных разностных уравнений по известному в данной области способу. Представленные на фиг. 3 и 4 контрольные процессы, следовательно, должны рассматриваться как указание, как программировать микроконтроллер, что является частью изобретения, чем использовать дискретную аппаратуру. Для одного и того же микроконтроллера, при условии, если он имеет достаточную емкость и запрограммирован должным образом, возможно функционирование и в качестве регулятора 60 включения муфты, включая определение точки касания муфты по изобретению, и в качестве регулятора 33 смещения передачи. Считается, что микроконтроллер типа Intel 80C196 имеет достаточный диапазон исчисления, чтобы быть пригодным в данном способе.
Как уже отмечалось, элементы фиг. 3 и 4 предпочтительно вводятся через
дискретные разностные уравнения в микроконтроллер.
Цифровые значения в дискретных разностных уравнениях представляют собой функцию интенсивности выборки процессора. Приведенные ниже конкретные
значения основаны на частоте выборки, равной 100 кГц.
Возможна более низкая частота выборки, для которой потребуются различные значения коэффициента для получения одной и той же ответной реакции
фильтра. Корректировка этих коэффициентов для частоты
выборки не выходит за рамки квалифицированного обычного подхода в данной области. В предпочитаемом варианте i-ое значение результата вычисления
РI предфильтра 62 представлено формулой:
РI=0,98Рi-1+0,02Sref (1)
где Рi-1 - непосредственное предыдущее значение выхода
предфильтра;
Sref - опорный входной
сигнал скорости;
i-ый выход SCompI компенсатора 64 опережения предпочтительно рассчитывается по формуле:
SCompI=0,63265SCompi-1+2,6327SIni
-
2,2653SIni-1 (2)
где SCompi-1 - предшествующее значение выхода компенсатора,
SIni
- текущее значение входного сигнала скорости передачи;
SIni-1 - следующее предыдущее значение входного сигнала скорости передачи. i-ое значение сигнала CEng сцепления муфты,
вырабатываемое регулятором 65 муфты, представлено
формулой:
СЕngi=СЕngi-1+SЕrri-0,98SЕrri-1 (3)
где СЕngi-1 - непосредственно
предыдущее значение сигнала сцепления муфты;
SЕrri - текущее значение сигнала погрешности скорости; и
SЕrri-1 - непосредственно предыдущее значение сигнала
погрешности скорости. i-ое значение прошедшего
через фильтр сходного сигнала SFili скорости передачи от низкочастотного фильтра 66 представлено выражением:
SFili=1,
7667SFili-1-0,7866SFili-2+0,
02SIni (4)
где SFili-1 - непосредственно предшествующее значение прошедшего через фильтр входного сигнала скорости
передачи; и
SFili-2 - следующее
предшествующее значение прошедшего через фильтр входного сигнала скорости передачи. Наконец, i-ое значение прошедшего через фильтр измеряемого
сигнала СFili положения муфты имеет вид:
СFili=0,98СFili-1+0,02CPoS1 (5)
где СFili-1 - непосредственно предыдущее значение
прошедшего через фильтр измеряемого сигнала положения
муфты.
Этот подход обеспечивает преимущество в определении точки касания. Этот способ основан на изменении сцепления муфты, которое передает известный незначительный крутящий момент. Так как передача находится в нейтральном положении, к входному передаточному валу 25 не прилагается никаких других крутящих моментов и, следовательно, нет помех. Путем измерения сцепления муфты, которое передает этот известный незначительный крутящий момент, точку касания можно определить с большей надежностью, чем путем поиска начальной точки передачи крутящего момента. Система обратной связи гарантирует то, что передающее этот незначительный крутящий момент сцепление надежно достигнуто. Этого нельзя выполнить так же легко в начальной точке передачи крутящего момента. Кроме того, инерционный тормоз и датчик сцепления муфты обычно уже имеются в основной системе, так что не требуется никакой дополнительной аппаратуры. Работа этой системы, как описано выше, начинается с исходного состояния сцепления в нейтральном положении, двигателя в режиме холостого хода, воздействия на инерционный тормоз для освобождения или полного расцепления фрикционной муфты. Тогда, как графически показано на фиг.5, фрикционная муфта постепенно подается или сдвигается к сцепленному положению до тех пор, пока она не пройдет точку касания (ТК) и измеренная входная скорость достигнет опорной скорости. В этом случае движение муфты обеспечивается посредством разницы между входной и опорной скоростями, причем входная скорость в начальной стадии равна нулю и поэтому значительно меньше опорной скорости. В альтернативном варианте работа такой системы начинается с исходного состояния сцепления в нейтральном положении, двигателя в режиме холостого хода, воздействия на инерционный тормоз, для воздействия на или полного сцепления фрикционной муфты.
Как показано на фиг.6 кривой А, фрикционная муфта, начиная с полностью сцепленного (ПС) положения, постепенно освобождается или расцепляется до тех пор, пока она не достигнет точки 83 (показанной на фиг.2), которая находится выше точки касания, где фрикционная муфта может начать скользить под воздействием инерционного тормоза и измеренная входная скорость достигнет опорной скорости. Как и в предыдущем случае, движение муфты обеспечивается посредством разницы входной и опорной скоростей, но в этом случае входная скорость первоначально является скоростью холостого хода двигателя и поэтому она много выше опорной скорости. Этот альтернативный вариант обеспечивает преимущество, заключающееся в улучшенном управлении. Инерционный тормоз, имеющий низкий входной крутящий момент, воздействует на скорость постепенно при освобождении фрикционной муфты и тогда скорость затухания мала и легко управлять моментом расцепления муфты, при котором воздействие инерционного тормоза быстро преодолевается посредством высокой мощности крутящего момента муфты сцепления.
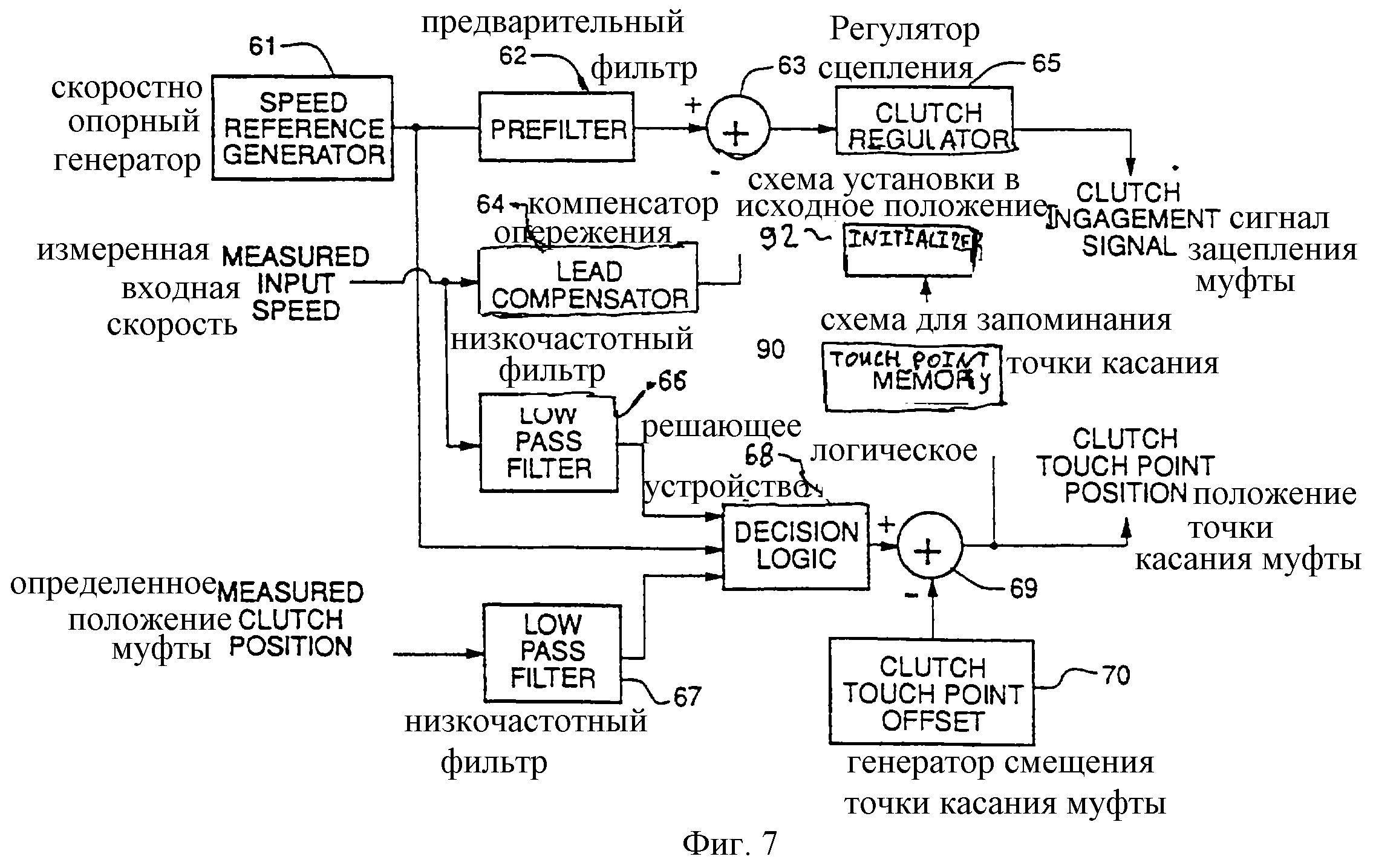
При незначительном изменении системы, другим преимуществом является достижение более быстрых результатов, как показано кривой В на фиг.6. Это достигается тогда, когда известна предыдущая точка касания и сцепление может смещаться из полностью сцепленного положения в исходное положение (ИП), находящееся около точки касания, для начала освобождения муфты. Несмотря на то что предыдущая точка касания известна, этого недостаточно, чтобы полагаться только на это значение, потому что изменения системы из-за состаривания, изнашивания, температурных отклонений приводят к изменению точки касания. Таким образом, желательно, чтобы точка касания корректировалась каждый раз, когда повышается расход энергии двигателя. Поэтому система, показанная на фиг.3, содержит память для хранения предыдущего значения точки касания и управление заданием исходных значений для смещения муфты в исходное положение на основании значения предыдущей точки касания.
Система, показанная на фиг.7, соответствует системе по фиг.3 за исключением дополнительной запоминающей точку касания схемы 90 и схемы 92 установки в исходное положение. Вход схемы 90 соединен с выходом сумматора 69 и запоминает самую последнюю из предыдущих точек касания или даже несколько последних точек касания для определения текущего среднего значения. Память предпочтительно содержит часть системы памяти микроконтроллера. Схема 92 соединена со схемой 90 и регулятором 65 сцепления и рассчитывает исходную позицию сцепления, основываясь на значениях одной или более предыдущих точек касания. Исходная позиция должна быть достаточно выше предыдущей точки касания с тем, чтобы дальнейшее освобождение муфты можно было использовать для определения точки касания. Исходная позиция муфты может быть, к примеру, исходной позицией предыдущей точки касания плюс зафиксированное приращение. Сигнал посылается от схемы 92 к регулятору 65 сцепления для установки сцепления в исходное положение. Затем посредством описанного выше управления сцеплением, основываясь на разнице между измеренной входной и опорной скоростями, перемещают муфту в точку 83 или несколько ниже нее. Отклонение точки касания муфты используется в системе по фиг.3 для определения действительной точки касания, но отклонение может иметь меньшее значение.
Преимущества систем, соответствующих фиг.3 и 4, описанные со ссылками на фиг. 6 и 7, для определения точки касания, могут быть достигнуты без дополнительных механических элементов, а главным образом путем соответствующего программирования микропроцессора.
Кроме того, более управляемое продвижение муфты вперед, присущее описанным выше системам, без резкого ускорения или замедления входного вала, обеспечивает более точное определение точки касания.
Реферат
Группа изобретений относится к технике комбинированного управления приводами транспортных средств. Точка касания муфты определяется при холостом ходе двигателя с передачей, имеющей нейтральное положение, и инерционным тормозом. Регулятор приводного механизма зацепляет муфту так, что измеряемая входная скорость передачи соответствует опорному сигналу, равному 40-60% скорости холостого хода. Это предопределяет степень сцепления при незначительном крутящем моменте, соответствующем тормозному. Когда входная скорость находится в пределах заранее определенной величины опорного сигнала скорости, т.е. 4%, имеется возможность определить точку касания, соответствующую степени сцепления. Эта степень сцепления может представлять собой сигнал положения или давления муфты. Точка касания устанавливается как разность между степенью сцепления для незначительного крутящего момента и смещением точки касания. Определение точки касания может начинаться в полностью сцепленном положении и постепенно опускаться в соответствии с разностью входной и опорной скоростей. Когда известно значение предыдущей точки касания, исходное положение муфты устанавливается несколько выше известной точки касания и затем имеет место постепенное расцепление. Группа изобретений обеспечивает надежное автоматическое включение муфты. 2 с. и 24 з.п. ф-лы, 7 ил.

Комментарии