Устройство для электромагнитного управления передачей крутящего момента (варианты), электронный блок управления вентилем и способ электромагнитного управления передачей - RU2123440C1
Код документа: RU2123440C1
Чертежи








Описание
Настоящее изобретение относится к управлению устройствами, передающими крутящий момент на автомобилях, и в особенности к способу и устройству для осуществления такого управления с помощью действующих через посредство текучей среды приводов с электромагнитным управлением.
В последнее время наблюдается растущий интерес к расширению автоматизации управления цепью привода в автомобилях и в особенности управления цепью привода тяжелых грузовиков. Хорошо известно применение автоматических трансмиссий в легковых автомобилях и легких грузовиках.
Обычно управление различными тормозами и сцеплениями в трансмиссиях осуществляется с помощью привода, действующего через посредство текучей среды, чаще всего гидравлического, но иногда и пневматического, питание которого осуществляется от источника давления текучей среды через электромагнитный вентиль с электронным управлением. Такое управление определяет степень включения для того, чтобы обеспечить плавную и эффективную передачу крутящего момента в процессе перехода между положениями включения и отключения. В частности, при таком управлении для определения степени включения применяют широтно-импульсную модуляцию; импульсы выдаются с постоянной частотой, а ширина импульса варьируется в зависимости от требующегося коэффициента заполнения. Быстрое включение обеспечивается, таким образом, при большой ширине импульса. Результатом такого режима управления является то, что каждый импульс большой ширины вызывает большое перемещение привода, так что в тех случаях, когда требуется умеренная или большая степень включения, отсутствует возможность плавного включения. Кроме того, медленное включение требует минимальной ширины импульса. Если первоначальная минимальная ширина задается в таком размере, чтобы быть достаточно большой для гарантированного обеспечения включения, она будет больше минимальной требующейся ширины. В противном случае придется начинать с импульса с практически нулевой шириной и увеличивать ширину импульса при каждой запрограммированной его выдаче, что ведет к значительной потере времени, пока не будет достигнута эффективная ширина импульса. Такая потеря времени в случае применения замкнутого контура управления может привести к неустойчивости.
Из заявки DE N 1505452 B 60 K 23/02, 1969, выбранной в качестве прототипа.
Известно устройство для электромагнитного управления передачей крутящего момента от двигателя к колесам автомобиля, содержащее действующий посредством текучей среды привод, питающий вход которого через электромагнитный вентиль подключен к источнику текучей среды под давлением, а выход посредством тяги связан с управляющим входом узла регулирования передачи, например узла сцепления, и электронный блок управления, выполненный с возможностью генерирования на выходе модулированных импульсных сигналов и связанный задающим входом с соответствующим устройством управления, например устройством управления дроссельной заслонкой, а выходом - с управляющим входом электромагнитного вентиля.
Из этой заявки известен электронный блок управления электромагнитным вентилем в цепи питания привода с текучей средой, содержащий генератор модулированных по частоте импульсных сигналов, элемент управляющего воздействия, выполненный с возможностью восприятия сигналов генератора и подачи тока на электромагнитный вентиль.
Известен также способ электромагнитного управления передачей крутящего момента от двигателя к колесам автомобиля, согласно которому электромагнитный вентиль в цепи питания привода от источника текучей среды под давлением включают импульсными сигналами, модулированными в зависимости от положения устройства управления.
В основу настоящего изобретения положена задача достижения плавного управления работой тормоза и сцепления в автомобильных трансмиссиях или других системах передачи крутящего момента за счет управления с высокой степенью разрешения, избегая за счет этого больших приращений включения.
Поставленная задача решается тем, что согласно изобретению электронный блок управления выполнен с возможностью модуляции импульсных сигналов по частоте, формирования длительности импульсов, минимально необходимой для срабатывания электромагнитного вентиля и проверки срабатывания последнего по сигналам обратной связи.
Желательно, чтобы электронный блок управления был выполнен с возможностью регулирования частоты генерируемых импульсов для получения требуемого коэффициента заполнения импульсного ряда.
Желательно, чтобы электронный блок управления был выполнен с возможностью генерирования импульсов на включение электромагнитного вентиля и сохранения управляющего воздействия на вентиль до окончания проверки его срабатывания по сигналам обратной связи.
Желательно, чтобы электронный блок управления был выполнен с возможностью генерирования импульсов равного периода на включение электромагнитного вентиля с длительностью, минимально необходимой для включения вентиля.
Желательно, чтобы электронный блок управления был выполнен с возможностью реагирования на сигналы обратной связи, характеризующие перемещение электромагнитного вентиля.
Желательно, чтобы электронный блок управления был выполнен с возможностью реагирования на сигналы обратной связи, характеризующие возникающую при перемещении электромагнитного вентиля противоЭДС.
Желательно, чтобы электронный блок управления включал в себя компьютер, снабженный программой задания длительности генерируемых импульсов, минимально необходимой для срабатывания электромагнитного вентиля и создания приращений в срабатывании привода, программой определения частоты импульсов, необходимой для получения требуемого коэффициента заполнения импульсного ряда, и выполнен с возможностью реагирования на сигналы обратной связи, характеризующие поступление текучей среды в привод, и подачи команды в компьютер для увеличения длительности генерируемых импульсов в случае непоступления сигналов обратной связи.
Желательно, чтобы электронный блок управления был выполнен с возможностью реагирования на сигналы обратной связи от датчика изменения положения привода.
Желательно, чтобы электронный блок управления был выполнен с возможностью реагирования на сигналы обратной связи от датчика изменения давления текучей среды в приводе.
Поставленная задача решается тем, что согласно изобретению электронный блок управления выполнен с возможностью модуляции импульсных сигналов по ширине, формирования длительности импульсов при наименьшем коэффициенте заполнения импульсного ряда, минимально необходимой для срабатывания электромагнитного вентиля, и проверки срабатывания последнего по сигналам обратной связи.
Желательно, чтобы электронный блок управления был выполнен с возможностью регулирования ширины импульсов для получения требуемого коэффициента заполнения импульсного ряда.
Желательно, чтобы электронный блок управления был выполнен с возможностью генерирования импульсов, которые имеют ширину, зависящую от желаемого импульсного коэффициента заполнения, включения электромагнитного вентиля и сохранения управляющего воздействия на вентиль до окончания проверки его срабатывания по сигналам обратной связи по меньшей мере до окончания импульса, при этом электронный блок управления включает в себя управление шириной импульсов для обеспечения желаемого коэффициента заполнения импульсного ряда.
Желательно, чтобы электронный блок управления включал в себя компьютер, снабженный программой задания длительности генерируемых импульсов, минимально необходимой для срабатывания электромагнитного вентиля и создания приращений в срабатывании привода, и выполнен с возможностью реагирования на сигналы обратной связи, характеризующие поступление текучей среды в привод, и подачи команды в компьютер для увеличения длительности генерируемых импульсов в случае непоступления сигналов обратной связи.
Поставленная задача решается также тем, что согласно изобретению в него введено средство сброса, выполненное с возможностью реагирования на возникающую при перемещении электромагнитного вентиля противоЭДС и завершения подачи тока к электромагнитному вентилю.
Желательно, чтобы орган формирования управляющего воздействия был выполнен с возможностью реагирования на каждый сигнал генератора.
Желательно, чтобы орган формирования управляющего воздействия имел триггер, один из входов которого является включающим входом данного блока и соединен с выходом генератора, другой вход является выключающим входом данного блока и соединен с выходом средства сброса.
Желательно, чтобы средство сброса имело обмотку, размещенную на сердечнике электромагнитного вентиля с возможностью обнаружения противоЭДС, возникающей в обмотке управления при срабатывания электромагнитного вентиля.
Желательно, чтобы средство сброса имело датчик тока, включенный последовательно с обмоткой управления электромагнитного вентиля с возможностью обнаружения противоЭДС, возникающей в обмотке управления при срабатывании электромагнитного вентиля.
Поставленная задача решается тем, что согласно изобретению вырабатывают сигнал обратной связи при каждом включении электромагнитного вентиля, а перед модуляцией импульсных сигналов управления регулируют длительность импульса до сведения ее к минимально необходимой для срабатывания вентиля и проверяют возможность срабатывания последнего при установленной минимально необходимой длительности.
Желательно, чтобы сигнал обратной связи вырабатывали, осуществляя обнаружение противоЭДС, возникающую в электромагнитном вентиле при его перемещении.
Желательно, чтобы импульсные сигналы управления электромагнитным вентилем модулировали по частоте, а формирование длительности импульса завершают при получении сигнала обратной связи.
Желательно, чтобы импульсные сигналы управления электромагнитным вентилем были модулированы по ширине, а формирование длительности импульса завершали посредством инициирования импульса командным сигналом с контролируемой шириной и прекращения импульса после получения сигнала обратной связи и прекращения командного сигнала.
Желательно, чтобы при регулировании длительности импульса и сведении ее к минимально необходимой для срабатывания электромагнитного вентиля первоначально выдали бы на вентиль импульс с длительностью, заведомо меньшей минимально необходимой, и в случае отсутствия сигнала обратной связи, подтверждающего включение вентиля, увеличивали бы длительность последующих импульсов до его срабатывания.
Желательно, чтобы в качестве сигнала обратной связи принимали сигнал, отображающий изменение положения привода, вызванное включением электромагнитного вентиля.
Желательно, чтобы в качестве сигнала обратной связи принимали сигнал, отображающий изменение давления текучей среды в приводе, вызванное включением электромагнитного вентиля.
В дальнейшем
изобретение поясняется конкретным вариантом его выполнения со ссылкой на прилагаемые
чертежи, на которых:
фиг. 1 и 2 изображают графическое увеличение давления, иллюстрирующее
широтно-импульсную и частотно-импульсную модуляцию соответственно,
фиг. 3 - блок-схему
управления трансмиссией в соответствии с настоящим изобретением,
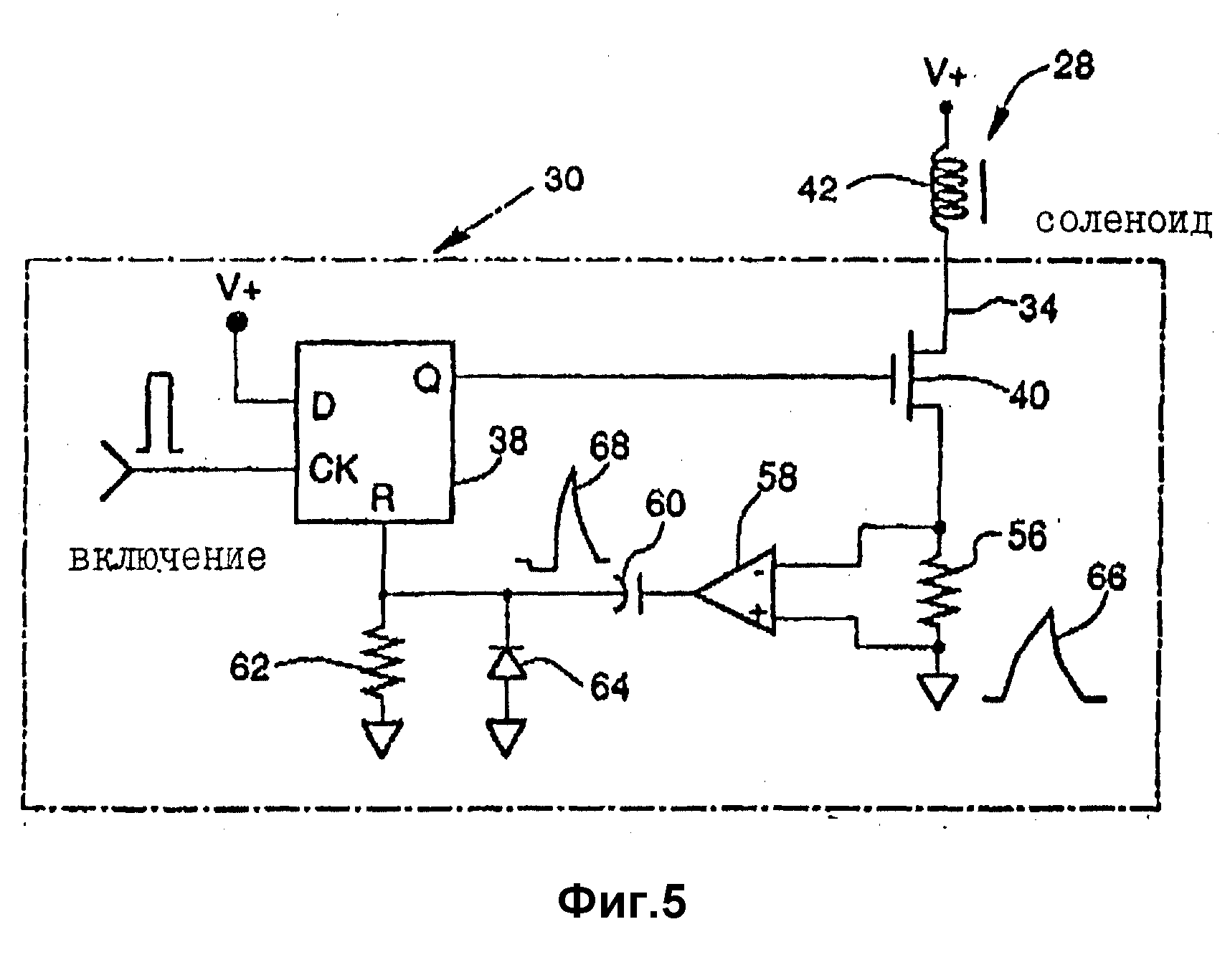
фиг. 4 и 5 схематически
изображают системы управления для фиг. 3,
фиг. 6 изображает блок-схему управления
трансмиссией в соответствии с другим вариантом реализации настоящего изобретения,
фиг. 7 изображает
схему компьютерной программы, применяемой для управления согласно фиг. 6,
фиг. 8
- схематически цепь реализации изобретения для управления с широтно-импульсным модулированием,
фиг.
9 - схематически изображает систему электромагнитного управления для фиг. 6,
фиг.
10 - схему компьютерной программы для применения управления с фиг. 6 и программы с фиг. 7 к управлению с
широтно-импульсным модулированием.
Последующее описание управления трансмиссией основывается на использовании в качестве примера одного типа управления, в котором перед зубчатой передачей применяется автоматическое фрикционное сцепление. Изобретение, однако, в равной степени применимо к другим вариантам реализации трансмиссий, в которых для осуществления или управления передачей крутящего момента для приведения в действие тормоза или сцепления используется давление текучей среды. Описание предусматривает повышение давления, однако таким же образом может контролироваться и уменьшение давления. Термин "устройство для передачи крутящего момента" применяется иногда для обозначения как тормоза, так и сцепления.
Фиг. 1 и 2 являются графическим изображением увеличения давления, иллюстрирующим соответственно эффект широтно-импульсной модуляции и частотно-импульсной модуляции. Модулированный сигнал включает и выключает электромагнитный вентиль, причем процентная доля занятого им времени выражается показателем коэффициента заполнения. Каждый импульс создает усилие возбуждения вентиля, которое поддерживается в течение времени действия импульса. Общая степень возрастания давления зависит от коэффициента заполнения импульсного ряда соленоида и в каждом случае одинакова. При широтно-импульсной модуляции импульсы выдаются с постоянной частотой, а ширина варьируется от короткого импульса при низком коэффициенте заполнения до более длительных импульсов при высоких коэффициентах заполнения. Поскольку у ширины импульса имеется практически допустимый нижний предел, существует также минимальное значение ширины при более высоких коэффициентах заполнения; т.е., если минимальная ширина имеет место при коэффициенте заполнения 1%, ширина при коэффициенте заполнения 50% должна в 50 раз превышать минимальную. Умеренный коэффициент заполнения влечет большие шаги увеличения давления, как показано на фиг. 1, вызывая низкую степень разрешения. Повышение коэффициента заполнения ведет к увеличению величины шагов при одинаковой частоте приращений.
При управлении с частотно-импульсной модуляцией применяются импульсы одинаковой ширины, а для варьирования коэффициента заполнения используют изменение частоты. Для достижения небольших приращений давления, как показано на фиг. 2, выбирается небольшая ширина импульса и ширина импульса или период остаются практически равными при всех частотах. Для получения высоких коэффициентов заполнения применяются высокие частоты. Результатом является плавное, постепенное изменение давления, позволяющее улучшить управление функциями трансмиссии.
На фиг. 3 показано фрикционное сцепление 10 с электромагнитным управлением, соединяющее двигатель 12 с зубчатой передачей 14, осуществляющей привод колес автомобиля 16. Сцепление 10, которое фактически может быть многодисковым, изображено в виде ведущего диска 28 и ведомого диска 20, который прижимается к ведущему диску. Привод 22 управляет положением ведомого диска 20 посредством тяги 24. Привод состоит из пневматического или гидравлического линейного двигателя, питаемого источником давления текучей среды 26 через электромагнитный вентиль 28. Небольшие изменения в перемещении привода или усилии зависят от поступления в привод с небольшими приращениями текучей среды. Система электромагнитного управления 30 под воздействием педали управления дроссельной заслонкой 32 определяет требующееся действие сцепления 10 и выдает частотно-импульсно модулированный сигнал, чтобы получить коэффициент заполнения импульсного ряда электромагнитного вентиля, который обеспечит нужную работу сцепления. Линии 34 и 36 соединяют систему электромагнитного управления 30 с электромагнитным вентилем 28.
Для полного использования преимуществ метода частотно-импульсной модуляции необходимо, чтобы ширина импульса была настолько малой, насколько это позволяют требования соленоида; это означает, что импульсы не должны быть настолько короткими, что электромагнитный вентиль будет реагировать не на каждый импульс. Способ получения периодов импульсов, достаточно длинных для включения вентиля, заключается в подаче возбуждающего тока на соленоид, получении сигнала обратной связи путем регистрации движения арматуры соленоида или вентиля и последующем прерывании тока. Таким образом, обеспечивается включение вентиля, а длительность импульса не превышает минимального времени срабатывания.
Одна схема установления минимального периода импульса показана на фиг. 4. Часть системы электромагнитного управления 32 включает D-триггер 38, вход данных которого соединен с источником постоянного напряжения V+, его тактовый вход соединен с частотно контролируемым сигналом для управления коэффициентом заполнения, а его выход Q соединен с затвором служащего возбудителем полевого транзистора 40. Один конец соленоидной катушки 42 электромагнитного вентиля подключен к источнику напряжения V+, а другой через линию 34 подключен к полевому транзистору 40, так что период импульсов тока в соленоиде равен периоду на выходе Q. Катушка 42 намотана на сердечник 44, а подвижная арматура 46 (соединенная с вентилем, что не показано) установлена таким образом, чтобы реагировать на изменения магнитного потока в сердечнике. Перемещение арматуры вызывает изменения потока, которые отражаются в катушке 42 в форме противоЭДС. Обмотка датчика 48 на сердечнике 44 также реагирует на изменение потока, выдавая сигнал, соответствующий противоЭДС. Обмотка 48 соединена через диод 50 с выводом сброса триггера 38. Каждая сторона диода 50 соединена с землей через резисторы 52 и 54. В процессе работы поступающий на тактовый вход импульс запускает триггер, включая выход Q и делая проводящим полевой транзистор. Проходящий через обмотку 42 ток вызывает движение арматуры 46 и возникающая в результате противоЭДС, генерируемая в обмотке датчика 48, подает сигнал на вывод сброса триггера, отключая выход Q и ток, пропускаемый через катушку 42. Поэтому импульс, подаваемый на тактовый вход, должен быть короче периода выхода Q.
Вторая схема для установления минимального периода импульса показана на фиг. 5 и в ней, подобно предыдущей схеме, для возбуждения тока в катушке 42 используют D-триггер 38 и полевой транзистор 40, однако вместо использования отдельной обмотки датчика она регистрирует изменения тока в катушке, вызванные противоЭДС. Второй линии 36, соединяющей систему управления 30 с электромагнитным клапаном, не требуется. Полевой транзистор 40 соединен с землей через резистор 56. Входы усилителя-инвертора 58 подключены через резистор 56, выходы соединены с землей через цепь дифференциатора, состоящую из включенных последовательно конденсатора 60 и резистора 62. Спай резистора и конденсатора соединен с выводом сброса триггера 38. Фиксирующий диод 64, включенный через резистор, не допускает более чем одного диодного падения сигнала напряжения ниже потенциала земли. Работа иллюстрируется формой волны тока 66, проходящего через резистор 56, и формой волны напряжения дифференциатора 68, подаваемой на вывод сброса. Ток катушки возбуждается очень коротким импульсом, подаваемым на тактовый вход триггера 38. При усилении тока катушки 66 усилитель выдает отрицательный сигнал, фиксированный на небольшом значении в дифференциаторе. Когда перемещение арматуры вызывает небольшой сигнал противоЭДС, ток ослабевает, а дифференциатор быстро реагирует, выдавая положительный импульс в форме волны 68, которого достаточно для возврата триггера 38 в исходное положение. Полученное изменение состояния полевого транзистора вызывает продолжение ослабевания тока в катушке до нулевого значения. Как и в схеме, показанной на фиг. 4, ширина импульса возбуждения вентиля должна быть минимально необходимой для надежной работы электромагнитного вентиля и будет одинаковой для диапазона частот, требующегося для работы при коэффициенте заполнения до 100%.
На фиг. 6 показана другая система управления приводом сцепления с использованием в электрической цепи управляющего устройства на основе микрокомпьютера. Цепь привода 10-16 такая же, как и в системе на фиг. 3, а привод 22, электромагнитный вентиль 28, источник давления и управление дроссельной заслонкой 32 также одинаковы. Система электромагнитного управления 30', однако, основывается на применении компьютера и выполняет программу выдачи импульса минимальной ширины для включения электромагнитного вентиля и другую программу определения частоты импульсов, требующейся для получения нужного коэффициента заполнения. Система управления 30' нуждается в информации для проверки работы вентиля. Информация предоставляется параметром включения, реагирующим на поступление в привод текучей среды. Параметр выдается датчиком положения 70, механически соединенным с приводом 22 или со сцеплением 10 и регистрирующим движение привода или сцепления, направляя сигнал обратной связи в систему управления 30'. Сигнал обратной связи, относящийся или к положению, или к давлению, будучи полученным соответственно импульсной команде, подтверждает срабатывание вентиля. Сигнал обратной связи может быть затем использован для подтверждения того, что импульсная команда успешно выполнена. В данном случае импульсный сигнал управляющего устройства задает период импульса. Первоначально в качестве периода импульса задается заранее запрограммированное значение. Если сигнал обратной связи не поступает, для следующего импульса выбирается более длительный период и так продолжается до тех пор, пока период не окажется достаточно большим для надежной работы вентиля.
График последовательности операций на фиг. 7 иллюстрирует в качестве примера порядок генерирования минимального импульса 78 для операций управления и определения периода импульса. Частота или расчет времени для каждого импульса определяются по отдельности системой управления 30' и для каждого импульса генерируется прерывание. Первый шаг 80 заключается в установлении для периода Pi значения Pmin, которое, как ожидается, будет достаточным для возбуждения соленоида или близким к этому. При шаге 82 период импульса устанавливается равным значению Pmin, так что при генерировании импульса он будет иметь период Pmin. Получение прерывания подтверждается при шаге 84, а затем в ходе шага 86 программа ожидает в течение короткого периода времени, примерно 20 мс, достаточного для срабатывания системы в ответ на включение вентиля. Если по истечении заданного времени сигнал обратной связи не будет получен (шаг 88), период импульса Pmin увеличивается в ходе шага 90, так что при следующей выдаче импульса будет применен более длительный период импульса, после чего будут повторены шаги 82-88. При получении сигнала обратной связи, как предусмотрено шагом 88, величина изменения положения или давления сравнивается с пороговым значением при шаге 92. Если изменение не превышает порогового значения, генерирование импульсов продолжается без дальнейшего изменения периода импульса Pmin, но если изменение превышает пороговое значение, минимальная ширина импульса Pmin уменьшается в ходе шага 94 для следующего импульса. Благодаря этой программе в случае, если период импульса окажется недостаточным для успешного включения электромагнитного вентиля, период импульса увеличивается до нахождения оптимального значения, а в случае слишком большого увеличения периода импульса он сокращается. Таким образом гарантируется, что ширина импульса будет достаточной для включения электромагнитного вентиля, но не допускается, чтобы значительно превысила минимальное эффективное значение.
Таким образом, можно видеть, что преимущества частотно-импульсной модуляции могут быть полностью использованы в устройствах передачи крутящего момента автомобильных механизмов передачи усилий и что для их реализации существует несколько технических систем. Частотно-импульсная модуляция позволяет получить очень короткие импульсы включения соленоида, позволяющие плавно изменять давление привода и, таким образом, положение сцепления или тормоза, и дает, кроме того, очень высокое разрешение, способствующее высокой степени управляемости.
Та же способность гарантировать получение минимальных эффективных импульсов полезна в системах широтно-импульсной модуляции, работающих при очень низком коэффициенте заполнения. Применение возбуждения минимальных импульсов при небольших погрешностях управления позволяет добиться наиболее высокой разрешающей способности управления, а более значительная ширина импульсов при высоких коэффициентах заполнения, когда они имеют место, заменяет минимальные значения.
На фиг. 8 иллюстрируется аппаратное обеспечение широтно-импульсной модуляции, применимое к схемам, показанным как на фиг. 4, так и на фиг. 5. Широтно-импульсно модулированный сигнал управляющего устройства 96 поступает на тактовый вход триггера 38 и на один вход элемента ИЛИ 98. Выход Q триггера также подключен к входу элемента ИЛИ, так что сигнал на выходе элемента ИЛИ длиннее периода модулированного сигнала включения или периода сигнала на выходе Q. Выход элемента ИЛИ подключен для управления возбудителем соленоида и поэтому электромагнитный вентиль и сигнал обратной связи, поступающий на вывод сброса триггера, гарантируют, что сигнал на выходе Q прерывается сразу при смещении вентиля, как описано выше. Таким образом, если ширина импульса, поступившего с управляющего устройства 96, очень мала, компоновка триггера обеспечивает работу вентиля в течение минимально возможного времени, однако, если входной сигнал будет длиннее, вентиль будет включен на более длительный период.
Программный подход к широтно-импульсной модуляции, примененный в устройстве, показанном на фиг. 6, наилучшим образом можно понять, разобравшись, что управляющее устройство 30' состоит из контроллера на базе компьютера или регулятора 100 и таймера 102, взаимно соединенных линиями 104 и 106, показанными на фиг. 9. Программа помещена в регулятор, который сравнивает эталон с сигналом обратной связи, чтобы определить погрешность и выдать на линию 104 импульсный сигнал с шириной, в наибольшей степени позволяющей свести к минимуму или исключить погрешность. Таймер 102 выдает импульсы с постоянной частотой и шириной, заданной регулятором 100. В начале выдачи каждого импульса таймер выдает на линию 106 сигнал прерывания. В регуляторе 100 выполняется программная последовательность 110, показанная на фиг. 10. В ходе первого шага 112 определяется команда на ширину импульса Pw для исправления погрешности. Затем в ходе шага 114 определяется, не является ли команда Pw меньше значения первоначального постоянного Pi плюс некоторое небольшое приращение Дельта. Дельта выбирается для гарантирования расчета минимального обеспеченного периода импульса, если команда Pw слишком мала для надежного включения вентиля. Если Pw меньше Pi + Дельта, осуществляется операция 78', сходная с операцией 78 на фиг. 7, предназначенная для обновления значения наименьшей гарантированной ширины импульса. Единственным различием между операциями 78 и 78' является шаг 82, на котором период импульса для операции 78' устанавливается как Pmin + Pw. Импульс на выходе будет, таким образом, иметь наименьшее гарантированное значение Pmin + Pw. Если в ходе шага 114 команда Pw окажется не меньше чем Pi + Дельта, значение Pout устанавливается равным Pw + Pmin. Значение Pmin становится смещением, которое после объединения с Pw при шаге 116 дает линейное изменение Pout при возрастании Pw, а перерыва в расчете ширины импульса при переходе с операции 78' к шагу 116 не происходит.
Таким образом, и широтно-импульсной модуляции, и частотно-импульсной модуляции способствует регулирование небольших командных импульсов таким образом, чтобы они не были слишком малы для эффективного управления вентилем и в то же время не были ненужно большими.
Реферат
Изобретение относится к автомобильной технике и предназначено для использования при управлении тяговым приводом. Задача - достижение плавного управления работой тормоза и сцепления в автомобильной трансмиссии за счет высокой степени разрешения без больших приращений включения. Управление осуществляется при воздействии давления текучей среды. В приводе предусмотрены электромагнитные вентили. В одной схеме с применением частотно-импульсного модулирования импульсы с короткой длительностью для всех коэффициентов заполнения генерируются при наличии обратной связи с электромагнитным вентилем или приводом. Система электромагнитного управления включает триггер, который подает ток на соленоид. Перемещение соленоида вызывает возбуждение противоЭДС, а ее воздействие на магнитный поток и ток в соленоиде регистрируется и используется в качестве сигнала обратной связи для сброса триггера и отключения тока сразу после срабатывания вентиля. В другой схеме с применением широтно-импульсной модуляции система компьютерного управления выдает команду на определенную длительность импульса. Производится наблюдение за положением или давлением в приводе для выработки сигнала обратной связи на компьютер. 4 с. и 21 з.п.ф-лы, 10 ил.

Комментарии