Устройство адаптивного управления для пусковой муфты транспортного средства - RU2644492C1
Код документа: RU2644492C1
Чертежи



Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству адаптивного управления для пусковой муфты транспортного средства, которое автоматически выполняет адаптацию муфты для пусковой муфты, которая зацепляется в режиме проскальзывания во время трогания с места.
Уровень техники
[0002] Традиционно, устройство, которое определяет возникновение толчкообразной вибрации из флуктуации в разности частот вращения и т.п., и выполняет управление подавлением толчкообразной вибрации, чтобы уменьшать крутящий момент муфты и крутящий момент двигателя, когда определяется возникновение толчкообразной вибрации, известно как примерное управление подавлением толчкообразной вибрации пусковой муфты (например, см. патентный документ 1). Тем не менее, это традиционное устройство служит для подавления толчкообразной вибрации по факту и за счет этого обеспечивает возможность возникновения толчкообразной вибрации пусковой муфты.
[0003] Напротив, известен мокрый фрикционный диск, в котором после того, как бумажный фрикционный материал связывается с базовым диском, мокрый фрикционный диск выполняет процедуру приработки фрикционной поверхности проскальзывания бумажного фрикционного материала с другим диском, чтобы подавлять начальную толчкообразную вибрацию мокрого фрикционного диска (например, см. патентный документ 2). "Начальная толчкообразная вибрация" означает шум и вибрацию, которые формируются при начале движения транспортного средства посредством перевода пусковой муфты (фрикционного зацепляющего элемента) в состояние зацепления в режиме проскальзывания на начальных стадиях до адаптации муфты.
Документы предшествующего уровня техники
Патентные документы
[0004] Патентный документ 1. Выложенная заявка на патент (Япония) № 2013-24281
Патентный документ 2. Выложенная заявка на патент (Япония) № 2009-36249
Сущность изобретения
Задача, решаемая изобретением
[0005] Тем не менее, в традиционном мокром фрикционном диске имеются проблемы в том, что для того, чтобы выполнять процесс приработки, который добавляет предварительно определенную прижимающую силу и дифференциальное вращение на стадии изготовления муфты, требуется новое оборудование, чтобы моделировать монтаж на транспортном средстве, и возрастает число этапов, требуемых для процесса приработки. Помимо этого, имеется проблема в том, что даже если шероховатость фрикционной поверхности проскальзывания бумажного фрикционного материала сглажена заранее, при установке в фактическом транспортном средстве в качестве пусковой муфты, возникают случаи, в которых начальная толчкообразная вибрация возникает во время трогания с места вследствие вариативности производства продукта.
[0006] С учетом вышеописанных проблем, цель настоящего изобретения заключается в том, чтобы предоставлять устройство адаптивного управления для пусковой муфты транспортного средства, которое предотвращает, заранее, возникновение начальной толчкообразной вибрации во время трогания с места.
Средство достижения цели
[0007] Чтобы достигать вышеуказанной цели, устройство адаптивного управления для пусковой муфты транспортного средства согласно настоящему изобретению содержит пусковую муфту и средство адаптивного управления муфтой.
Пусковая муфта размещается между источником приведения в движение и ведущими колесами и зацепляется в режиме проскальзывания во время трогания с места.
Средство адаптивного управления муфтой выполняет адаптивное управление муфтой, при котором пусковая муфта подвергается состоянию, в котором ее температура составляет предварительно определенную температуру или выше в течение предварительно определенного периода времени, по меньшей мере, сразу перед тем, как транспортное средство начинает двигаться.
Преимущества изобретения
[0008] Следовательно, адаптивное управление муфтой, при котором пусковая муфта подвергается состоянию, в котором ее температура составляет предварительно определенную температуру или выше в течение предварительно определенного периода времени, выполняется, по меньшей мере, сразу перед тем, как транспортное средство начинает двигаться. Затем во время трогания с места, пусковая муфта, в которой уже выполнено адаптивное управление муфтой, зацепляется в режиме проскальзывания.
Таким образом, адаптивное управление муфтой для адаптации муфты переднего хода в состоянии монтажа на транспортном средстве выполняется до того, как транспортное средство начинает двигаться. При этом адаптивном управлении муфтой, адаптация материала диска пусковой муфты производится посредством задания температуры пусковой муфты как предварительно определенной температуры или выше. Затем, посредством подвергания состоянию нахождения при предварительно определенной температуре или выше в течение предварительно определенного периода времени, характеристика коэффициента трения пусковой муфты стабилизируется. За счет такой стабилизации характеристики коэффициента трения, можно положительно наклонять характеристику μ-V, и задавать распределение коэффициентов трения в направлении вдоль окружности более однородным, исключая причину начальной толчкообразной вибрации.
Как результат, можно предотвращать, заранее, возникновение начальной толчкообразной вибрации во время трогания с места.
Краткое описание чертежей
[0009] Фиг. 1 является общим системным видом, иллюстрирующим гибридное транспортное средство FR-типа с приводом на задние колеса (один пример транспортного средства), к которому применяется пусковая муфта, которая представляет собой цель адаптивного управления муфтой первого варианта осуществления.
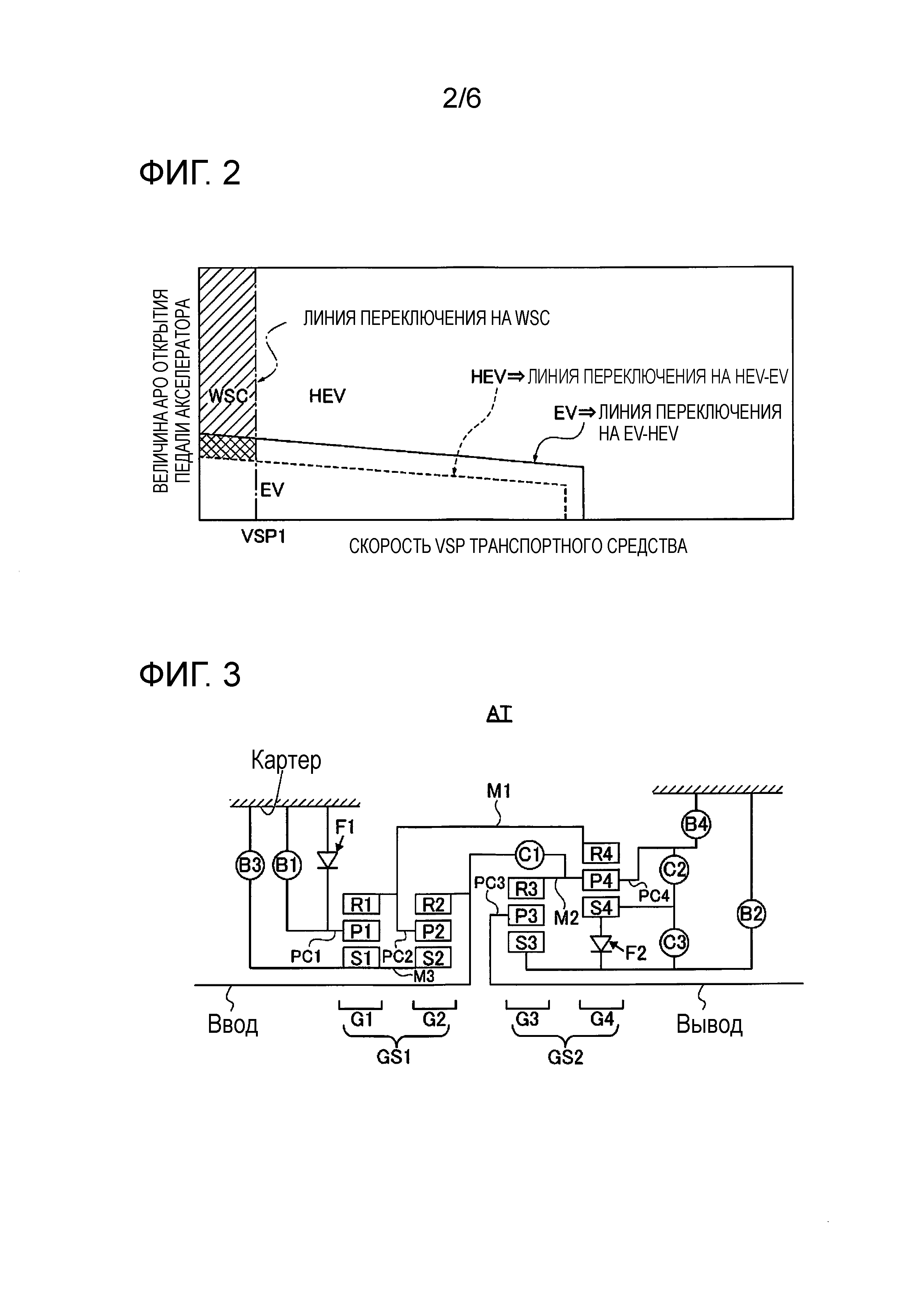
Фиг. 2 является видом, иллюстрирующим один пример карты выбора EV-HEV, заданной в модуле выбора режима интегрального контроллера первого варианта осуществления.
Фиг. 3 является схематичным видом, иллюстрирующим один пример автоматической трансмиссии, которая включает пусковую муфту (вторую муфту), которая представляет собой цель адаптивного управления муфтой первого варианта осуществления.
Фиг. 4 является таблицей операций зацепления, иллюстрирующей пусковую муфту (вторую муфту) и зацепление каждого фрикционного зацепляющего элемента на каждой ступени зубчатой передачи автоматической трансмиссии первого варианта осуществления.
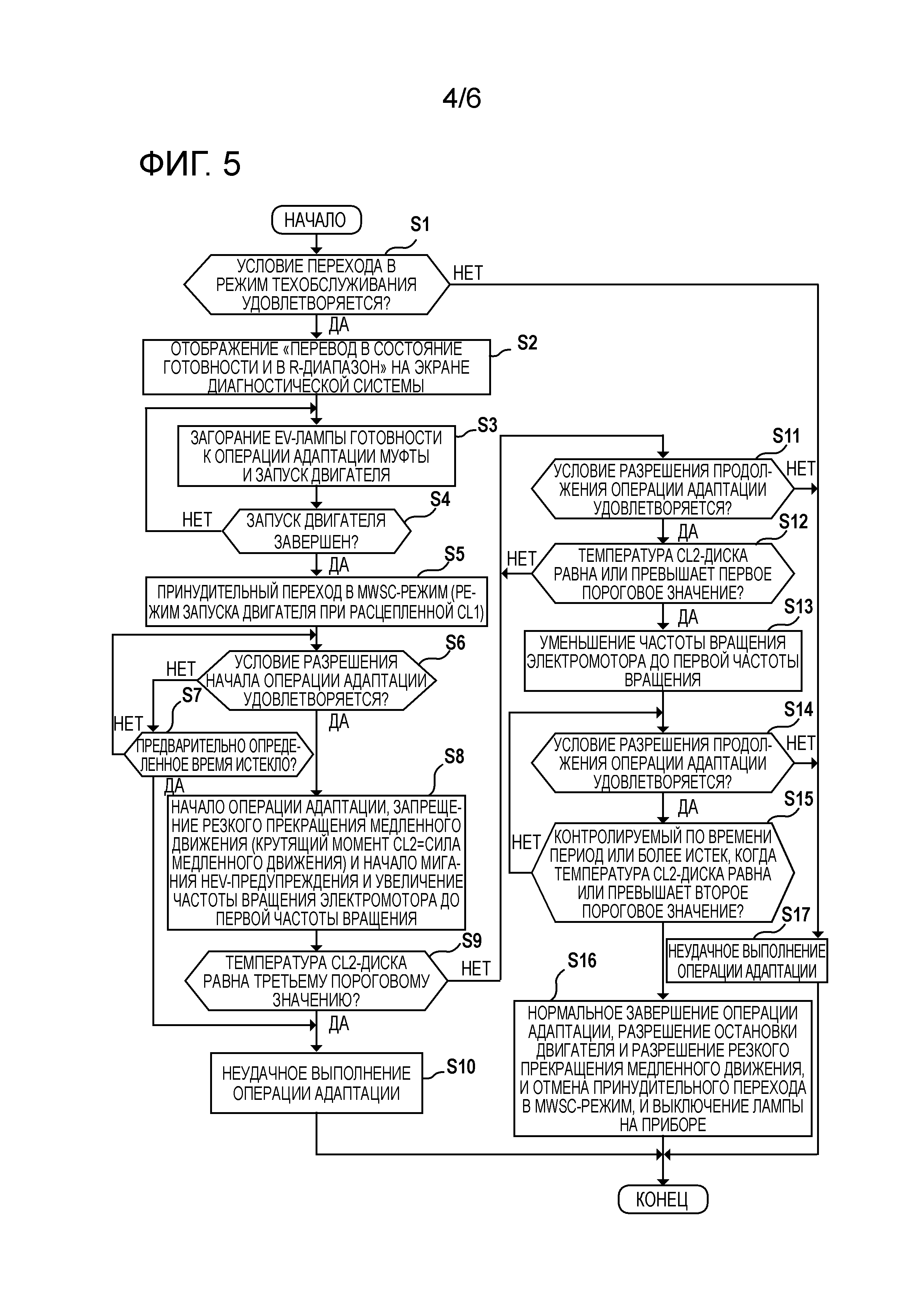
Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса адаптивного управления муфтой, выполняемого согласно конкретным операциям интегрального контроллера первого варианта осуществления.
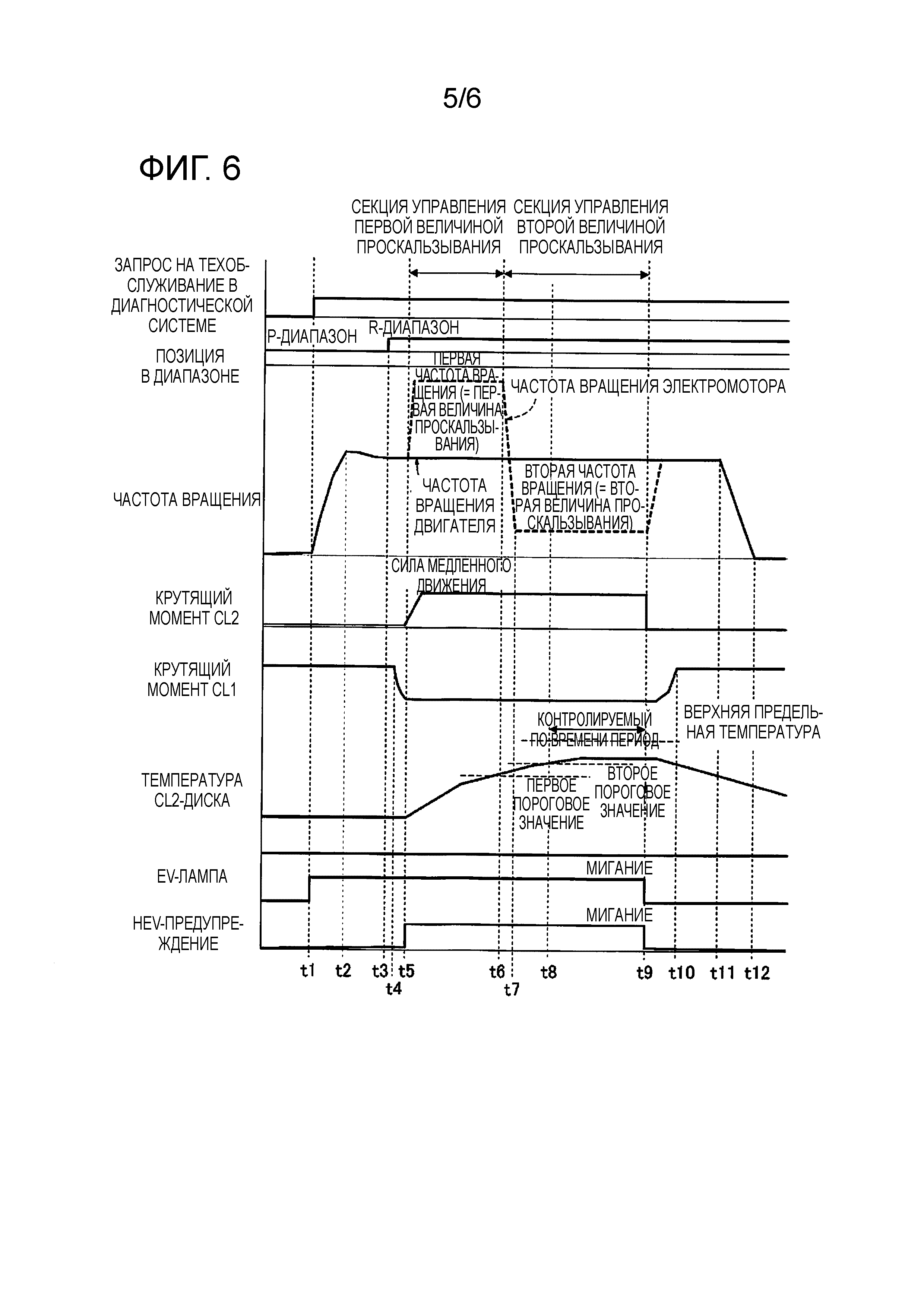
Фиг. 6 является временной диаграммой, иллюстрирующей соответствующие характеристики запроса на техобслуживание в диагностической системе/позиции в диапазоне/частот вращения (частоты вращения двигателя, частоты вращения электромотора)/крутящего момента CL2/крутящего момента CL1/температуры CL2-диска/EV-лампы/HEV-предупреждения, когда адаптивное управление муфтой выполняется в первом варианте осуществления.
Фиг. 7 является графиком характеристики максимальной выходной мощности электромотора, иллюстрирующим сравнение между присутствием/отсутствием запуска двигателя в характеристике взаимосвязи между крутящим моментом электромотора и частотой вращения электромотора для электромотора-генератора, предоставленного для гибридной приводной системы первого варианта осуществления.
Подробное описание вариантов осуществления изобретения
[0010] Ниже описывается предпочтительный вариант осуществления для реализации устройства адаптивного управления для пусковой муфты транспортного средства настоящего изобретения на основе первого варианта осуществления, проиллюстрированного на чертежах.
Первый вариант осуществления
[0011] Сначала описывается конфигурация.
Ниже отдельно описываются "общая конфигурация системы", "схематичная конфигурация автоматической трансмиссии" и "конфигурация адаптивного управления муфтой" относительно конфигурации устройства адаптивного управления для пусковой муфты транспортного средства, которая применяется к гибридному транспортному средству FR-типа (одному примеру транспортного средства) в первом варианте осуществления.
[0012] Общая конфигурация системы
Фиг. 1 иллюстрирует гибридное транспортное средство FR-типа с приводом на задние колеса, к которому применяется пусковая муфта, которая представляет собой цель адаптивного управления муфтой первого варианта осуществления; фиг. 2 иллюстрирует один пример карты выбора EV-HEV, заданной в модуле выбора режима интегрированного контроллера 10. Ниже описывается общая конфигурация системы на основе фиг. 1 и фиг. 2.
[0013] Приводная система это гибридного транспортного средства FR-типа содержит двигатель Eng, первую муфту CL1, электромотор/генератор MG (электромотор), вторую муфту CL2, автоматическую трансмиссию AT, входной трансмиссионный вал IN, карданный вал PS, дифференциал DF, левый ведущий вал DSL, правый ведущий вал DSR, левое заднее колесо RL (ведущее колесо) и правое заднее колесо RR (ведущее колесо), как проиллюстрировано на фиг. 1. M-O/P - это механический масляный насос, S-O/P - это масляный электрический насос, FL - это левое переднее колесо, FR - это правое переднее колесо, и FW - это маховик.
[0014] Первая муфта CL1 представляет собой фрикционный зацепляющий элемент, предоставленный между двигателем Eng и электромотором/генератором MG, который представляет собой так называемую нормально закрытую муфту, которая переводится в зацепленное состояние посредством силы смещения диафрагменной пружины, когда гидравлическое давление CL1 не прикладывается, и которая расцепляется посредством приложения гидравлического давления CL1, которое уравновешивает силу смещения.
[0015] Автоматическая трансмиссия AT представляет собой ступенчатую трансмиссию, в которой ступени зубчатой передачи с семью передачами переднего хода/одной передачей заднего хода автоматически переключаются в соответствии со скоростью транспортного средства, величиной открытия позиции педали акселератора и т.п. Фрикционный зацепляющий элемент (муфта или тормоз) для переключения передач автоматической трансмиссии AT используется в качестве второй муфты CL2, которая располагается в тракте передачи мощности от электромотора/генератора MG на левое и правое задние колеса RL, RR, вместо муфты, которая добавляется как новая в качестве выделенной муфты, независимой от автоматической трансмиссии AT. Иными словами, из множества фрикционных зацепляющих элементов, которые зацепляются на каждой ступени зубчатой передачи автоматической трансмиссии AT, фрикционный зацепляющий элемент, который выбирается в качестве элемента, который соответствует условиям зацепления и т.д., выполнен с возможностью представлять собой вторую муфту CL2. Гидравлический узел 6 первой муфты и гидравлический узел 8 второй муфты включены в гидравлический регулирующий клапанный узел CVU AT, который предусмотрен в автоматической трансмиссии AT.
[0016] Это гибридное транспортное средство FR-типа содержит режим электромобиля (в дальнейшем называемый "EV-режимом"), режим гибридного транспортного средства (в дальнейшем называемый "HEV-режимом") и режим управления крутящим моментом приведения в движение (в дальнейшем называемый "WSC-режимом"), в качестве режимов согласно различиям в режиме приведения в движение.
[0017] "EV-режим" представляет собой режим, в котором первая муфта CL1 расцеплена, и в котором электромотор/генератор MG является единственным источником приведения в движение, содержащий режим приведения в движение за счет электромотора (с приведением в движение за счет электромотора) и режим выработки за счет генератора (с рекуперацией за счет генератора). Этот EV-режим выбирается, например, когда требуемая движущая сила является низкой, и обеспечивается SOC аккумулятора.
[0018] "HEV-режим" представляет собой режим, в котором первая муфта CL1 переводится в зацепленное состояние, в котором двигатель Eng и электромотор/генератор MG сконфигурированы как источники приведения в движение, содержащий режим с использованием усиления электромотора (с приведением в движение за счет электромотора), режим выработки за счет двигателя (с рекуперацией за счет генератора) и режим выработки за счет рекуперативного замедления (с рекуперацией за счет генератора). Этот "HEV-режим" выбирается, например, когда требуемая движущая сила является высокой, либо когда SOC аккумулятора является недостаточным.
[0019] "WSC-режим" представляет собой режим, в котором режим приведения в движение представляет собой "HEV-режим", но перегрузочная способность по передаче крутящего момента второй муфты CL2 управляется при поддержании второй муфты CL2 в состоянии зацепления в режиме проскальзывания посредством управления частотой вращения электромотора/генератора MG. Перегрузочная способность по передаче крутящего момента второй муфты CL2 управляется таким образом, что движущая сила, которая передается через вторую муфту CL2, представляет собой требуемую движущую силу, которая представлена посредством рабочей величины нажатия педали акселератора водителя. Этот "WSC-режим" выбирается, когда частота вращения двигателя находится в области, которая опускается ниже частоты вращения на холостом ходу, как при трогании с места, когда "HEV-режим" выбирается. Режим, в котором режим приведения в движение переведен в "EV-режим" посредством расцепления первой муфты CL1, и перегрузочная способность по передаче крутящего момента второй муфты CL2, управляется при поддержании второй муфты CL2 в состоянии зацепления в режиме проскальзывания, посредством управления частотой вращения электромотора/генератора MG, называется "MWSC-режимом".
[0020] Система управления гибридным транспортным средством FR-типа сконфигурирована с возможностью содержать контроллер 1 двигателя, контроллер 2 электромотора, инвертор 3, аккумулятор 4, контроллер 5 первой муфты, гидравлический узел 6 первой муфты, AT-контроллер 7, гидравлический узел 8 второй муфты, тормозной контроллер 9 и интегрированный контроллер 10, как проиллюстрировано на фиг. 1.
[0021] Каждый из контроллеров 1, 2, 5, 7 и 9, описанных выше, и интегрированный контроллер 10 соединяются через линию 11 CAN-связи, которая обеспечивает возможность обмена информацией между ними. Элемент 12 - это датчик частоты вращения двигателя, 13 - это круговой датчик позиции, 15 - это датчик хода первой муфты, который определяет позицию хода поршня 14a гидравлического актуатора 14, 19 - это датчик скорости вращения колес, и 20 - это датчик хода тормоза.
[0022] AT-контроллер 7 вводит информацию из датчика 16 величины открытия позиции педали акселератора, датчика 17 скорости транспортного средства, переключателя 18 режима движения, который определяет позицию выбранного диапазона (N-диапазон, D-диапазон, R-диапазон, P-диапазон и т.д.), и т.п. Затем при движении при выборе D-диапазона, выполняется поиск оптимальной ступени переключения передач из позиций, в которых рабочая точка, определенная из величины APO открытия позиции педали акселератора и скорости VSP транспортного средства, существует на карте переключения передач, которая не показана, и команда управления для получения искомой ступени переключения передач выводится в гидравлический регулирующий клапанный узел CVU AT. В дополнение к этому управлению переключением передач, управление полным зацеплением (HEV-режим)/зацеплением в режиме проскальзывания (запуск двигателя)/расцеплением (EV-режим) первой муфты CL1 выполняется на основе команды из интегрированного контроллера 10. Помимо этого, выполняется управление полным зацеплением (HEV-режим)/зацеплением в режиме проскальзывания на основе μ (EV-режим)/зацеплением в режиме проскальзывания с поглощением разности частот вращения (WSC-режим)/зацеплением в режиме проскальзывания с поглощением флуктуации крутящего момента (режим запуска/остановки двигателя) второй муфты CL2.
[0023] Интегрированный контроллер 10 управляет энергопотреблением всего транспортного средства и допускает функцию максимально эффективной работы транспортного средства; в него вводится необходимая информация из датчика 21 частоты вращения электромотора, который определяет частоту Nm вращения электромотора, и из других сенсорных переключателей 22, а также информация через линию 11 CAN-связи. Этот интегрированный контроллер 10 содержит модуль выбора режима, который выбирает искомый режим из позиций, в которых рабочая точка, определенная из величины APO открытия позиции педали акселератора и скорости VSP транспортного средства, существует на карте выбора EV-HEV, проиллюстрированной на фиг. 2, в качестве целевого режима. Затем интегральный контроллер выполняет управление запуском двигателя при переключении режима с "EV-режима" на "HEV-режим". Дополнительно, интегральный контроллер выполняет управление остановкой двигателя при переключении режима с "HEV-режима" на "EV-режима".
[0024] Схематичная конфигурация автоматической трансмиссии
Фиг. 3 иллюстрирует схематичный вид одного примера автоматической трансмиссии AT в первом варианте осуществления; фиг. 4 иллюстрирует состояние зацепления каждого фрикционного зацепляющего элемента на каждой ступени зубчатой передачи автоматической трансмиссии AT. Ниже описывается схематичная конфигурация автоматической трансмиссии AT на основе фиг. 3 и фиг. 4.
[0025] Автоматическая трансмиссия AT представляет собой ступенчатую автоматическую трансмиссию с семью передачами переднего хода/одной передачей заднего хода; движущая сила, по меньшей мере, из одного из двигателя Eng и электромотора/генератора MG вводится через входной трансмиссионный вал Input, и частота вращения изменяется посредством механизма переключения передач, содержащего четыре шестерни планетарной передачи и семь фрикционных зацепляющих элементов, и вывод из трансмиссии выполняется из выходного вала Output, как проиллюстрировано на фиг. 3
[0026] Относительно механизма переключения передач, описанного выше, первая планетарная коробка GS1 передач, сконфигурированная из первой шестерни G1 планетарной передачи и второй шестерни G2 планетарной передачи, и вторая планетарная коробка GS2 передач, сконфигурированная из третьей шестерни G3 планетарной передачи и четвертой шестерни G4 планетарной передачи, размещаются соосным образом в этом порядке. Дополнительно, первая муфта CL1, вторая муфта C2, третья муфта C3, первый тормоз B1, второй тормоз B2, третий тормоз B3 и четвертый тормоз B4 размещаются в качестве фрикционных зацепляющих элементов с гидравлическим приводом. Кроме того, первая односторонняя муфта F1 и вторая односторонняя муфта F2 размещаются в качестве зацепляющих элементов с механическим приводом.
[0027] Первая шестерня G1 планетарной передачи, вторая шестерня G2 планетарной передачи, третья шестерня G3 планетарной передачи и четвертая шестерня G4 планетарной передачи представляют собой типы планетарных передач с сателлитами одного типа, содержащие солнечные шестерни (S1-S4), коронные шестерни (R1-R4) и водила (PC1-PC4), которые поддерживают сателлиты (P1-P4), зацепляющиеся с обеими шестернями (S1-S4) и (R1-R4).
[0028] Входной трансмиссионный вал Input соединяется со второй коронной шестерней R2, и в него вводится вращающая движущая сила, по меньшей мере, из одного из двигателя Eng, и электромотора/генератора MG. Выходной трансмиссионный вал Output соединяется с третьим водилом PC3 и передает выходную вращающую движущую силу на ведущие колеса (левое и правое задние колеса RL, RR) через главную шестерню и т.п.
[0029] Первая коронная шестерня R1, второе водило PC2 и четвертая коронная шестерня R4 как единое целое соединены посредством первого соединительного элемента M1. Третья коронная шестерня R3 и четвертое водило PC4 как единое целое соединены посредством второго соединительного элемента M2. Первая солнечная шестерня S1 и вторая солнечная шестерня S2 как единое целое соединены посредством третьего соединительного элемента M3.
[0030] Фиг. 4 является таблицей операций зацепления; на фиг. 4, метка ○ указывает то, что фрикционный зацепляющий элемент гидравлически зацепляется в состоянии приведения в движение, метка (○) указывает то, что фрикционный зацепляющий элемент гидравлически зацепляется в состоянии движения по инерции (приведения в действие односторонней муфты в состоянии приведения в движение), а отсутствие метки указывает то, что фрикционный зацепляющий элемент находится в расцепленном состоянии. Дополнительно, фрикционный зацепляющий элемент в зацепленном состоянии, указываемом посредством перекрестной штриховки, указывает элемент, который используется в качестве второй муфты CL2 на каждой ступени зубчатой передачи.
[0031] Относительно переключения на смежную ступень зубчатой передачи, ступени зубчатой передачи с семью передачами переднего хода и одной передачей заднего хода могут быть реализованы посредством поочередного переключения передач, при котором, из фрикционных зацепляющих элементов, описанных выше, один зацепленный фрикционный зацепляющий элемент расцепляется, а один расцепленный фрикционный зацепляющий элемент зацепляется, как проиллюстрировано на фиг. 4. Кроме того, когда ступень зубчатой передачи представляет собой первую ступень зубчатой передачи и вторую ступень зубчатой передачи, второй тормоз B2 должен представлять собой вторую муфту CL2. Когда ступень зубчатой передачи представляет собой первую третью ступень зубчатой передачи, вторая муфта C2 должна представлять собой вторую муфту CL2. Когда ступень зубчатой передачи представляет собой четвертую ступень зубчатой передачи и пятую ступень зубчатой передачи, третья муфта C3 должна представлять собой вторую муфту CL2. Когда ступень зубчатой передачи представляет собой первую шестую ступень зубчатой передачи и седьмую ступень зубчатой передачи, первая муфта C1 должна представлять собой вторую муфту CL2. Когда ступень зубчатой передачи представляет собой ступень зубчатой передачи заднего хода, четвертый тормоз B4 должен представлять собой вторую муфту CL2.
[0032] "Пусковая муфта" при движении в режиме переднего хода посредством выбора D-диапазона представляет собой второй тормоз B2 (= тормоз LOW/B низшей передачи), который зацепляется в режиме проскальзывания в качестве второй муфты CL2. Дополнительно, "пусковая муфта" при движении назад посредством выбора R-диапазона представляет собой четвертый тормоз B4 (= тормоз R/B заднего хода), который зацепляется в режиме проскальзывания в качестве второй муфты CL2 и представляет собой цель адаптивного управления муфтой в первом варианте осуществления.
[0033] Конфигурация адаптивного управления муфтой
Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса адаптивного управления муфтой, который выполняется согласно конкретным операциям интегрированного контроллера 10 первого варианта осуществления (средства адаптивного управления муфтой). Ниже описывается каждый из этапов на фиг. 5, который представляет конфигурацию процесса адаптивного управления муфтой.
[0034] На этапе S1, определяется то, удовлетворяется или нет условие перехода в режим техобслуживания, чтобы переходить в режим техобслуживания. Если "Да" (условие перехода в режим техобслуживания удовлетворяется), процесс переходит к этапу S2, а если "Нет" (условие перехода в режим техобслуживания удовлетворяется), процесс переходит к этапу S17.
Здесь, "условие перехода в режим техобслуживания" имеет такую конфигурацию, в которой условие перехода в режим техобслуживания удовлетворяется, когда удовлетворяются все три условия из (1) неготовности, (2) включенного PKB и (3) запроса на техобслуживание из диагностической системы присутствует, а когда любое из условий не удовлетворяется, условие перехода в режим техобслуживания не удовлетворяется.
"Неготовность" представляет собой условие для подтверждения того, что силовая передача находится в состоянии неспособности выводить крутящий момент приведения в движение. "Включенный PKB" представляет собой условие для подтверждения операции парковочного тормоза. "Запрос на техобслуживание из диагностической системы присутствует" представляет собой условие для подтверждения того, что запрос на адаптивное управление муфтой (один пример запроса на техобслуживание) выводится из бортовой системы диагностики (диагностической системы), например, посредством выполнения предварительно определенной конкретной криптографической операции, при намерении выполнять адаптивное управление муфтой на заводе или на рынке.
[0035] На этапе S2, после определения того, что условие перехода в режим техобслуживания удовлетворяется, на этапе S1, "перевод в состояние готовности и в R-диапазон" отображается на экране диагностической системы, и процесс переходит к этапу S3.
Таким образом, поскольку система не допускает проведение операции выбора автоматической трансмиссии AT посредством команды управления, экранная информация, которая указывает перевод в состояние готовности и выполнение операции выбора R-диапазона, предоставляется человеку, который выдает запрос на адаптивное управление муфтой.
[0036] На этапе S3, после отображения экрана диагностической системы на этапе S2 либо определения того, что запуск двигателя не завершен, на этапе S4, инструкции по переходу в состояние готовности выводятся в качестве операции подготовки для операции адаптации муфты, и процесс переходит к этапу S4.
Здесь, следующие две инструкции выводятся в качестве инструкций по переходу в состояние готовности для операции адаптации муфты.
(1) Инструкция для того, чтобы мигать EV-лампой, предоставленной в приборе
(2) Инструкция запуска двигателя
Затем согласно инструкции (2), электромотор/генератор MG используется в качестве стартерного электромотора двигателя, чтобы выполнять управление запуском двигателя, в котором двигатель Eng проворачивается и запускается через зацепленную первую муфту CL1.
[0037] На этапе S4, после готовности к операции адаптации муфты на этапе S3, определяется то, завершен или нет запуск двигателя. Если "Да" (запуск двигателя завершен), процесс переходит к этапу S5, а если "Нет" (запуск двигателя не завершен), процесс возвращается к этапу S3.
Здесь, определяется, что запуск двигателя завершен, когда приложение крутящего момента проворачивания из электромотора/генератора MG становится необязательным, и двигатель Eng переходит в состояние работы в режиме самоподдержания.
[0038] На этапе S5, после определения того, что запуск двигателя завершен, на этапе S4, режим приведения в движение принудительно переводится в MWSC-режим, и процесс переходит к этапу S6.
Здесь, "MWSC-режим" представляет собой подготовительный режим до тех пор, пока зацепленная первая муфта CL1 не будет расцеплена, при поддержании двигателя Eng в рабочем состоянии. Когда эта первая муфта CL1 расцепляется, поскольку вторая муфта CL2 по-прежнему также находится в расцепленном состоянии, нагрузка не прикладывается к электромотору/генератору MG, и электромотор/генератор MG поддерживает, некоторое время, частоту вращения посредством частоты вращения двигателя в момент времени, в который первая муфта CL1 расцепляется.
[0039] На этапе S6, после принудительного перехода в MWSC-режим на этапе S5, либо определения того, что предварительно определенное время не истекло, на этапе S7, определяется то, удовлетворяется или нет условие разрешения начала операции адаптации. Если "Да" (условие разрешения начала операции адаптации удовлетворяется), процесс переходит к этапу S8, а если "Нет" (условие разрешения начала операции адаптации не удовлетворяется), процесс переходит к этапу S7.
Здесь, "условие разрешения начала операции адаптации" предоставляется посредством условий (1) включенный тормоз, (2) включенный PKB, (3) выключенный акселератор, (4) остановлен, (5) "SOC ≥ пороговое значение", (6) "трансмиссионная жидкость ≥ пороговое значение" и (7) R-диапазон. Затем когда все семь условий удовлетворяются, считается, что условие разрешения начала операции адаптации удовлетворяется, а если какое-либо из условий не удовлетворяется, считается, что условие разрешения начала операции адаптации не удовлетворяется.
"Включенный тормоз" представляет собой условие для подтверждения операции нажатия служебного тормоза. "Выключенный акселератор" представляет собой условие для подтверждения операции снятия ноги с педали акселератора.
"Остановлен" представляет собой условие для подтверждения того, что скорость транспортного средства=0. "SOC ≥ пороговое значение" представляет собой условие для подтверждения того, что зарядная емкость аккумулятора (SOC) равна или выше порогового значения, которое обеспечивает приведение в действие электромотора. "Температура трансмиссионной жидкости ≥ пороговое значение" представляет собой условие для подтверждения того, что температура масла жидкости для автоматических трансмиссий (ATF) равна или выше порогового значения, которое обеспечивает гидравлическое давление CL2. "R-диапазон" представляет собой условие для подтверждения того, что операция выбора от P-диапазона до R-диапазона выполнена согласно отображению экрана диагностической системы.
[0040] На этапе S7, после определения того, что условие разрешения начала операции адаптации не удовлетворяется, на этапе S6, определяется то, истекло или нет предварительно определенное время после того, как начато определение условия на этапе S6. Если "Да" (предварительно определенное время истекло), процесс переходит к этапу S10, а если "Нет" (предварительно определенное время не истекло), процесс возвращается к этапу S6.
Здесь, "предварительно определенное время" задается в качестве времени ожидания операции, которое является достаточным для выполнения операции служебного тормоза, операции выбора и т.д., которые необходимы для того, чтобы удовлетворять условию разрешения начала операции адаптации.
[0041] На этапе S8, после определения, что условие разрешения начала операции адаптации удовлетворяется, на этапе S6, инструкция поначалу выводится с тем, чтобы начинать операцию адаптации, и процесс переходит к этапу S9.
Здесь, следующие три инструкции выводятся в качестве инструкций поначалу для начала операции адаптации:
(1) Инструкция для того, чтобы запрещать резкое прекращение медленного движения и задавать крутящий момент CL2 в качестве силы медленного движения;
(2) Инструкция для того, чтобы начинать мигание лампы HEV-предупреждения, предоставленной в приборе; и,
(3) Инструкция для того, чтобы увеличивать частоту вращения электромотора до первой частоты вращения.
(1) представляет собой инструкцию для того, чтобы поддерживать крутящий момент зацепления эквивалентным силе медленного движения, посредством зацепления тормоза R/B заднего хода в R-диапазоне посредством подачи гидравлического давления CL2, на основе запрещения резкого прекращения медленного движения. (3) представляет собой инструкцию для того, чтобы управлять частотой вращения электромотора/генератора MG и увеличивать частоту вращения электромотора до первой частоты вращения (например, 2500 об/мин), которая соответствует первой величине проскальзывания, при которой теплообразование значительно выше рассеяния тепла. Поскольку частота вращения на стороне выходного вала тормоза R/B заднего хода в остановленном состоянии является нулевой, частота вращения электромотора непосредственно становится величиной проскальзывания тормоза R/B заднего хода.
[0042] На этапе S9, после начала операции адаптации на этапе S8, определяется то, равна или выше либо нет температура CL2-диска тормоза R/B заднего хода третьего порогового значения. Если "Да" ("температура CL2-диска ≥ третье пороговое значение"), процесс переходит к этапу S10, а если "Нет" ("температура CL2-диска < третье пороговое значение"), процесс переходит к этапу S11.
Здесь, "температура CL2-диска" может получаться посредством получения информации температуры CL2-диска посредством способа вычисления оценки, который использует температуру окружающей среды и тепловой баланс, полученный посредством вычитания величины сброса тепла из величины вырабатываемого тепла, которая интегрирована из крутящего момента зацепления CL2, величины проскальзывания и истекшего времени. Помимо этого, информация температуры CL2-диска может получаться из значения определения из температурного датчика, предоставленного на диске муфты сцепления и т.п.
Дополнительно, "третье пороговое значение" задается равным температуре (например, 230°C) между вторым пороговым значением (например, 220°C), при котором производится прохождение адаптации материала диска тормоза R/B заднего хода, и верхней предельной температурой (например, 250°C), при которой происходит ухудшение характеристик материала фрикционной накладки тормоза R/B заднего хода. Таким образом, третье пороговое значение предоставляется в качестве порогового значения определения, при котором если температура CL2-диска (= температура муфты) уже является высокой, и начинается операция адаптации муфты, которая предоставляет величину проскальзывания в этом высокотемпературном состоянии, температура сразу превышает верхнюю предельную температуру.
[0043] На этапе S10, после определения того, что предварительно определенное время истекло, на этапе S7, либо определения того, что "температура CL2-диска ≥ третье пороговое значение", на этапе S9, "неудачное выполнение операции адаптации" отображается, и состояние возвращается в исходное состояние до начала адаптивного управления муфтой, и процесс переходит к концу.
Таким образом, при переходе от этапа S7 к этапу S10, состояние возвращается в исходное состояние посредством разрешения остановки двигателя, отмены принудительного перехода в MWSC-режим и выключения лампы прибора. При переходе от этапа S9 к этапу S10, состояние возвращается в исходное состояние посредством разрешения остановки двигателя, разрешения резкого прекращения медленного движения, отмены принудительного перехода в MWSC-режим и выключения лампы прибора.
[0044] На этапе S11, после определения того, что "температура CL2-диска < третье пороговое значение", на этапе S9, либо определения того, что "температура CL2-диска < первое пороговое значение", на этапе S12, определяется то, удовлетворяется или нет условие разрешения продолжения операции адаптации. Если "Да" (условие разрешения продолжения операции адаптации удовлетворяется), процесс переходит к этапу S12, а если "Нет" (условие разрешения продолжения операции адаптации не удовлетворяется), процесс переходит к этапу S17.
Здесь, "условие разрешения продолжения операции адаптации" предоставляется посредством условий, идентичных условиям (1)-(7), которые представляют собой условие разрешения начала операции адаптации, описанное выше, и когда все семь условий удовлетворяются, считается, что условие разрешения продолжения операции адаптации удовлетворяется, а если какое-либо из условий не удовлетворяется, считается, что условие разрешения продолжения операции адаптации не удовлетворяется.
[0045] На этапе S12, после определения того, что условие разрешения продолжения операции адаптации удовлетворяется на этапе S11, определяется то, равна или выше либо нет температура CL2-диска тормоза R/B заднего хода первого порогового значения. Если "Да" ("температура CL2-диска ≥ первое пороговое значение"), процесс переходит к этапу S13, а если "Нет" ("температура CL2-диска < первое пороговое значение"), процесс возвращается к этапу S11.
Здесь, "первое пороговое значение" задается равным температуре, которая ниже (например, 200°C) второго порогового значения (например, 220°C), при котором производится прохождение адаптации материала диска тормоза R/B заднего хода. То есть, первое пороговое значение задается в качестве порогового значения температуры, при котором можно получать сходимость ко второму пороговому значению посредством уменьшения величины проскальзывания, с учетом того, что перерегулированная часть температуры CL2-диска увеличивается.
[0046] На этапе S13, после определения того, что "температура CL2-диска ≥ первое пороговое значение", на этапе S12, частота вращения электромотора посредством электромотора/генератора MG уменьшается с первой частоты вращения (например, 2500 об/мин) до второй частоты вращения (например, 400 об/мин), и процесс переходит к этапу S14.
Здесь, "вторая частота вращения" задается в качестве частоты вращения, которая соответствует второй величине проскальзывания, которая подавляет увеличение температуры CL2-диска посредством по существу уравновешивания сбрасываемого тепла и вырабатываемого тепла.
[0047] На этапе S14, после уменьшения частоты вращения электромотора на этапе S13 либо определения того, что истекшее время с момента, когда "температура CL2-диска становится ≥ второго порогового значения", на этапе S15 меньше контролируемого по времени периода, определяется то, удовлетворяется или нет условие разрешения продолжения операции адаптации. Если "Да" (условие разрешения продолжения операции адаптации удовлетворяется), процесс переходит к этапу S15, а если "Нет" (условие разрешения продолжения операции адаптации не удовлетворяется), процесс переходит к этапу S17.
Здесь, "условие разрешения продолжения операции адаптации" предоставляется посредством добавления условия "температура CL2-диска (8) ≤ верхняя предельная температура" в "условие разрешения начала операции адаптации" на этапе S6. Затем когда все восемь условий удовлетворяются, считается, что условие разрешения продолжения операции адаптации удовлетворяется, а если какое-либо из условий не удовлетворяется, считается, что условие разрешения продолжения операции адаптации не удовлетворяется. Таким образом, она управляется таким образом, что она не превышает верхнюю предельную температуру (например, 250°C), при которой происходит ухудшение характеристик материала фрикционной накладки тормоза R/B заднего хода в то время, когда операция адаптации продолжается.
[0048] На этапе S15, после определения того, что условие разрешения продолжения операции адаптации удовлетворяется, на этапе S14, определяется то, равно или выше либо нет истекшее время с момента, когда "температура CL2-диска становится ≥ второго порогового значения" (например, 220°C), контролируемого по времени периода (например, 5 секунд). Если "Да" (равно или выше контролируемого по времени периода, истекшего с момента, когда "температура CL2-диска ≥ второе пороговое значение"), процесс переходит к этапу S16, а если "Нет" (истекшее время с момента, когда "температура CL2-диска ≥ второе пороговое значение", меньше контролируемого по времени периода), процесс возвращается к этапу S14.
Здесь, "контролируемый по времени период" задается равным времени, полученному посредством экспериментирования или другого средства, в качестве времени, требуемого для того, чтобы стабилизировать характеристику коэффициента трения тормоза R/B заднего хода, при поддержании температуры CL2-диска равной 220°C или выше.
[0049] На этапе S16, после определения того, что контролируемый по времени период или более истек с момента, когда "температура CL2-диска становится ≥ вторым пороговым значением", на этапе S15, операция адаптации нормально завершается, состояние возвращается в исходное состояние до начала, и процесс переходит к концу.
Таким образом, состояние возвращается в исходное состояние посредством разрешения остановки двигателя, разрешения резкого прекращения медленного движения, отмены принудительного перехода в MWSC-режим и выключения лампы прибора.
[0050] На этапе S17, после определения того, что условие перехода в режим техобслуживания не удовлетворяется, на этапе S1, либо определения того, что условие разрешения продолжения операции адаптации не удовлетворяется, на этапе S11 или этап S14, "неудачное выполнение операции адаптации" отображается, и состояние возвращается в исходное состояние до начала адаптивного управления муфтой, и процесс переходит к концу.
Таким образом, при переходе от этапа S1 к этапу S17, состояние непосредственно возвращается в исходное состояние. При переходе от этапа S11 или этапа S14 к этапу S17, состояние возвращается в исходное состояние посредством разрешения остановки двигателя, разрешения резкого прекращения медленного движения, отмены принудительного перехода в MWSC-режим и выключения лампы прибора.
[0051] Далее описываются операции.
Ниже отдельно описываются "операция процесса адаптивного управления муфтой", "операция адаптивного управления муфтой" и "характерная операция адаптивного управления муфтой", относительно операций в устройстве адаптивного управления для пусковой муфты транспортного средства первого варианта осуществления.
[0052] Операция процесса адаптивного управления муфтой
Ниже описывается операция процесса адаптивного управления муфтой, на основе блок-схемы последовательности операций способа, проиллюстрированной на фиг. 5.
Во-первых, когда условие перехода в режим техобслуживания удовлетворяется, процесс переходит от "этап S1 → этап S2 → этап S3 → этап S4". Если условие перехода в режим техобслуживания удовлетворяется на этапе S1, на этапе S2, "Перевод в состояние готовности и в R-диапазон" отображается на экране диагностической системы. На следующем этапе S3, инструкции по переходу в состояние готовности (инструкция для того, чтобы мигать EV-лампой, предоставленной в приборе, инструкция запуска двигателя), выводятся в качестве подготовки, чтобы начинать операцию адаптации муфты. На этапе S4, определяется то, завершен или нет запуск двигателя, в котором электромотор/генератор MG представляет собой стартерный электромотор двигателя. Затем последовательность операций, протекающая от "этап S3 → этап S4", повторяется до тех пор, пока запуск двигателя не будет завершен. Когда запуск двигателя завершается, процесс переходит от этапа S4 к этапу S5; на этапе S5, режим приведения в движение принудительно переводится в MWSC-режим, и зацепленная первая муфта CL1 расцепляется, при поддержании двигателя Eng в рабочем состоянии. Следовательно, когда процесс переходит к этапу S5, завершается подготовка к тому, чтобы начинать адаптивное управление муфтой для выполнения управления величиной проскальзывания тормозом R/B заднего хода посредством управления частотой вращения электромотора/генератора MG.
[0053] Когда выполнена подготовка к тому, чтобы начинать адаптивное управление муфтой, процесс переходит от этапа S5 к этапу S6; на этапе S6 определяется то, удовлетворяется или нет условие разрешения начала операции адаптации, предоставленное посредством семи условий. Это определение установления условия разрешения начала операции адаптации выполняется до тех пор, пока не истечет предварительно определенное время на этапе S7. Затем когда установление условия разрешения начала операции адаптации определяется на этапе S6 в течение предварительно определенного времени, процесс переходит к этапу S8; на этапе S8, выводится инструкция трогания с места, чтобы начинать операцию адаптации. Посредством этой инструкции трогания с места для начала операции адаптации, тормоз R/B заднего хода в R-диапазоне зацепляется посредством подачи гидравлического давления CL2, и крутящий момент зацепления поддерживается эквивалентным силе медленного движения. С другой стороны, частота вращения электромотора/генератора MG управляется, чтобы увеличивать частоту вращения электромотора до первой частоты вращения (например, 2500 об/мин), которая соответствует первой величине проскальзывания, при которой теплообразование значительно выше рассеяния тепла.
[0054] Когда операция адаптации посредством первой величины проскальзывания начинается посредством увеличения частоты вращения электромотора до первой частоты вращения (например, 2500 об/мин) при поддержании крутящего момента зацепления тормоза R/B заднего хода эквивалентным силе медленного движения, процесс переходит от этапа S8 к этапу S9. На этапе S9, определяется то, равна или выше либо нет температура CL2-диска третьего порогового значения, и если "температура диска < третье пороговое значение", процесс переходит от "этап S11 → этап S12". Затем если условие разрешения продолжения операции адаптации удовлетворяется на этапе S11, и в то время как определяется то, что "температура CL2-диска < первое пороговое значение" (например, 200°C) на этапе S12, повторяется последовательность операций, которая переходит от "этап S11 → этап S12". Таким образом, управление первой величиной проскальзывания выполняется для того, чтобы поддерживать частоту вращения электромотора равной первой частоте вращения (например, 2500 об/мин) при поддержании крутящего момента зацепления тормоза R/B заднего хода эквивалентным силе медленного движения, от начала операции адаптации до тех пор, пока "температура CL2-диска не станет ≥ первого порогового значения".
[0055] Когда температура CL2-диска повышается посредством управления первой величиной проскальзывания, и определяется то, что "температура CL2-диска ≥ первое пороговое значение" (например, 200°C), на этапе S12, процесс переходит от этапа S12 к этапу S13. На этапе S13, частота вращения электромотора посредством электромотора/генератора MG уменьшается с первой частоты вращения (например, 2500 об/мин) до второй частоты вращения (например, 400 об/мин) с хорошей скоростью отклика. Затем когда процесс переходит от этапа S13 к "этап S14 → этап S15", условие разрешения продолжения операции адаптации удовлетворяется на этапе S14, и в то время когда определяется то, что истекшее время с момента, когда "температура CL2-диска становится ≥ второго порогового значения" (например, 220°C), меньше контролируемого по времени периода на этапе S15, повторяется последовательность операций, которая переходит от "этап S14 → этап S15". Таким образом, управление второй величиной проскальзывания выполняется для того, чтобы поддерживать частоту вращения электромотора равной второй частоте вращения (например, 400 об/мин) при поддержании крутящего момента зацепления тормоза R/B заднего хода эквивалентным силе медленного движения, от момента, когда "температура CL2-диска становится ≥ первое порогового значения", до тех пор, пока не истечет контролируемый по времени период.
[0056] Когда истекшее время от момента, когда "температура CL2-диска становится ≥ вторым пороговым значением" (например, 220°C), превышает заданный контролируемый по времени период, процесс переходит от этапа S15 к "этап S16 → конец". На этапе S16, операция адаптации муфты нормально завершается, и состояние возвращается в исходное состояние до начала адаптивного управления муфтой, посредством разрешения остановки двигателя, разрешения резкого прекращения медленного движения, отмены принудительного перехода в MWSC-режим и выключения лампы прибора. Таким образом, нормальная операция адаптации муфты завершается.
[0057] С другой стороны, если определено то, что условие перехода в режим техобслуживания не удовлетворяется, на этапе S1, процесс переходит от "этап S1 → этап S17", и "Неудачное выполнение операции адаптации" отображается. Помимо этого, когда определяется то, что предварительно определенное время истекло в то время, когда условие разрешения начала операции адаптации по-прежнему не удовлетворяется на этапе S7, процесс переходит от "этап S7 → этап S10", "Неудачное выполнение операции адаптации" отображается, и состояние возвращается в исходное состояние до начала адаптивного управления муфтой. Помимо этого, когда определяется то, что условие разрешения продолжения операции адаптации не удовлетворяется, на этапе S11 или этапе S14, процесс переходит от "этап S11 → этап S17" или от "этап S14 → этап S17", "Неудачное выполнение операции адаптации" отображается, и состояние возвращается в исходное состояние до начала адаптивного управления муфтой. Таким образом, если, по меньшей мере, условия, которые подтверждают остановку транспортного средства (включенный PKB, выключенный акселератор, включенный тормоз, состояние остановки транспортного средства), не удовлетворяются, операции нажатия педали акселератора не разрешается продолжаться; в силу этого безопасность обеспечивается при выполнении адаптивного управления муфтой на заводе или на рынке.
[0058] Операция адаптивного управления муфтой
Например, если адаптация пусковой муфты, которая зацепляется в режиме проскальзывания в R-диапазоне, является недостаточной, возникают случаи, в которых толчкообразная вибрация муфты возникает при движении назад, вызывая дискомфорт у водителя. Следовательно, "адаптивное управление муфтой", предложенное в настоящей заявке, создано для того, чтобы удовлетворять потребности пользователей на рынке, и нацелено на повышение качества перед поставкой с завода. Ниже описывается операция адаптивного управления муфтой, на основе временной диаграммы, проиллюстрированной на фиг. 6.
[0059] На фиг. 6, время t1 является временем удовлетворения условия перехода в режим техобслуживания. Время t2 является временем завершения запуска двигателя. Время t3 является временем операции выбора R-диапазона. Время t4 является временем принудительного перехода в MWSC-режим. Время t5 является временем удовлетворения условия разрешения начала операции адаптации. Время t6 является временем наступления первого порогового значения температуры CL2-диска. Время t7 является временем наступления второй частоты вращения. Время t8 является временем наступления второго порогового значения температуры CL2-диска. Время t9 является истекшим временем контролируемого по времени периода. Время t10 является временем повторного зацепления CL1. Время t11 является временем начала управления остановкой двигателя. Время t12 является временем остановки двигателя.
[0060] Во время t1, когда условие перехода в режим техобслуживания удовлетворяется, электромотор/генератор MG используется в качестве стартового электромотора, чтобы начинать управление запуском двигателя, в котором двигатель Eng проворачивается через зацепленную первую муфту CL1, и мигание EV-лампы начинается. Затем во время t2, запуск двигателя завершается. Затем когда операция выбора от P-диапазона до R-диапазона выполняется во время t3, принудительный переход в MWSC-режим начинается во время t4, в которое первая муфта CL1 расцепляется, при поддержании двигателя в рабочем состоянии. Электромотор/генератор MG находится в состоянии вращения наряду с двигателем Eng до тех пор, пока первая муфта CL1 не будет расцеплена, и электромотор/генератор MG поддерживает вращение вследствие инерции, даже когда первая муфта CL1 расцепляется.
[0061] Затем когда условие разрешения начала операции адаптации удовлетворяется во время t5, начинается управление для того, чтобы увеличивать крутящий момент CL2 тормоза R/B заднего хода до эквивалента силы медленного движения, и управление для того, чтобы увеличивать частоту вращения электромотора для электромотора/генератора MG до первой частоты вращения (например, 2500 об/мин). Затем мигание лампы HEV-предупреждения также начинается. Таким образом, управление первой величиной проскальзывания начинается, и температура CL2-диска увеличивается посредством градиента быстрого увеличения от времени t5 до времени t6. После этого, когда температура CL2-диска достигает первого порогового значения (например, 200°C) в момент времени t6, управление первой величиной проскальзывания завершается. Таким образом, если характеристики переходного процесса крутящего момента CL2 и частоты вращения электромотора включены, "время t5 - время t6" представляет собой секцию управления первой величиной проскальзывания.
[0062] Во время t6, когда управление первой величиной проскальзывания завершается, управление второй величиной проскальзывания начинается, чтобы уменьшать частоту вращения электромотора для электромотора/генератора MG до второй частоты вращения (например, 400 об/мин), и температура CL2-диска постепенно увеличивается посредством градиента постепенного увеличения от времени t6 до времени t8. После этого, когда частота вращения достигает второй частоты вращения во время t7, и температура CL2-диска достигает второго порогового значения (например, 220°C) во время t8, подсчет контролируемого по времени периода (например, 5 секунд) начинается; когда контролируемый по времени период истек во время t9, управление второй величиной проскальзывания завершается. Температура CL2-диска от времени t7 до времени t9 увеличивается посредством постепенного градиента увеличения до времени, которое представляет собой немного прошедшее время t8, и после того температура CL2-диска поддерживается практически постоянной до времени t9. Таким образом, если характеристики переходного процесса частоты вращения электромотора включены, "время t6 - время t9" представляет собой секцию управления второй величиной проскальзывания.
[0063] Во время t9, когда управление второй величиной проскальзывания завершается, крутящий момент CL2 уменьшается, и тормоз R/B заднего хода расцепляется в то время, когда увеличение крутящего момента CL1 начинается, и одновременно, мигание EV-лампы и лампы HEV-предупреждения прекращается. Затем первая муфта CL1 повторно зацеплена во время t10, управление остановкой двигателя начинается во время t11, и двигатель Eng остановлен во время t12, в силу этого завершая адаптивное управление муфтой.
[0064] Таким образом, первый вариант осуществления имеет такую конфигурацию, в которой адаптивное управление муфтой, при котором тормоз R/B заднего хода подвергается состоянию, в котором температура CL2-диска тормоза заднего хода равна или выше второго порогового значения (например, 220°C) в течение контролируемого по времени периода (например, 5 секунд), по меньшей мере, сразу перед тем, как транспортное средство начинает двигаться. Таким образом, адаптивное управление муфтой для адаптации тормоза R/B заднего хода в состоянии монтажа на транспортном средстве выполняется до того, как средство начинает двигаться. При этом адаптивном управлении муфтой, адаптация материала диска тормоза R/B заднего хода производится посредством задания температуры CL2-диска тормоза R/B заднего хода равной второму пороговому значению или выше. Затем посредством подвергания состоянию, в котором температура CL2-диска равна второму пороговому значению или выше в течение контролируемого по времени периода, стабилизируется характеристика коэффициента трения тормоза R/B заднего хода. За счет такой стабилизации характеристики коэффициента трения, можно положительно наклонять характеристику μ-V, которая имеет отрицательный градиент, и задавать распределение коэффициентов трения в направлении вдоль окружности, которое является неоднородным, более однородным, исключая причину начальной толчкообразной вибрации.
Как результат, во время трогания с места, тормоз R/B заднего хода, в котором уже выполнено адаптивное управление муфтой, зацепляется в режиме проскальзывания, и возникновение начальной толчкообразной вибрации во время трогания с места в силу этого предотвращается заранее.
[0065] Если температура CL2-диска увеличивается до второго порогового значения или выше, то происходит прохождение адаптации материала диска тормоза R/B заднего хода ; причина, по которой характеристика коэффициента трения тормоза R/B заднего хода стабилизируется посредством подвергания этому высокотемпературному состоянию в течение контролируемого по времени периода, не известна. Тем не менее, ведущий диск тормоза R/B заднего хода, имеющего конструкцию многодискового тормоза, имеет такую конфигурацию, в которой материал фрикционной накладки (бумажный фрикционный материал, в котором подложка волокна пропитана термореактивной смолой и т.д.) прилипает к материалу металлическому диска, и материал противоположного диска выполнен с возможностью представлять собой ведомый диск, изготовленный из металлического диска. Следовательно, главная причина логически выводится как то, что в зависимости от температурных условий и временных условий, смола, которая пропитана в материале фрикционной накладки, отображает идентичные изменения свойств с тем, когда в состоянии адаптированной муфты, посредством многократного подвергания зацеплению в режиме проскальзывания. Главная причина, по которой развивается ухудшение характеристик, когда температура CL2-диска увеличивается выше верхней предельной температуры, также логически выводится как то, что смола, которая пропитана в материале фрикционной накладки, отображает изменения свойств в направлении ухудшения характеристик.
[0066] Характерная операция адаптивного управления муфтой
При адаптивном управлении муфтой первого варианта осуществления, крутящий момент трения и дифференциальное вращение предоставляются в тормоз R/B заднего хода, в состоянии остановки транспортного средства, чтобы устанавливать состояние зацепления в режиме проскальзывания, в котором вырабатывается тепло при трении. Затем температура тормоза R/B заднего хода увеличивается до второго порогового значения или выше, при котором производится прохождение адаптации материала диска, и тормоз заднего хода подвергается состоянию, в котором температура CL2-диска равна или выше второго порогового значения в течение контролируемого по времени периода, который требуется для того, чтобы стабилизировать характеристику коэффициента трения тормоза R/B заднего хода.
Другими словами, адаптивное управление муфтой выполнено с возможностью использовать источник гидравлической мощности и источник приведения в движение смонтированной в транспортном средстве системы и т.д. и инструктировать муфте подвергаться состоянию, в котором температура CL2-диска равна или выше второго порогового значения в течение контролируемого по времени периода, посредством тепла при трении, которое вырабатывается посредством установления состояния зацепления в режиме проскальзывания.
Следовательно, можно выполнять адаптивное управление муфтой, которое увеличивает температуру тормоза R/B заднего хода при поддержании смонтированного состояния в транспортном средстве без добавления теплового источника для увеличения температуры пусковой муфты.
[0067] Первый вариант осуществления имеет такую конфигурацию, в которой при адаптивном управлении муфтой, температура CL2-диска тормоза R/B заднего хода определяется, и величина проскальзывания увеличивается, когда определенная температура CL2-диска является низкой, и величина проскальзывания снижается, когда определенная температура CL2-диска является высокой.
Другими словами, можно управлять градиентом увеличения температуры CL2-диска посредством величины проскальзывания таким образом, что когда величина проскальзывания тормоза R/B заднего хода увеличивается, величина вырабатываемого тепла увеличивается, и градиент увеличения температуры CL2-диска повышается. Соответственно, когда температура CL2-диска является низкой, можно увеличивать температуру CL2-диска за короткий период времени посредством увеличения величины проскальзывания, а когда температура CL2-диска является высокой, можно подавлять увеличение температуры CL2-диска посредством уменьшения величины проскальзывания.
Следовательно, посредством задания адаптивного управления муфтой в качестве управления величиной проскальзывания, которое имеет высокотемпературную управляемость, можно уменьшать время, требуемое для адаптивного управления муфтой, в котором тормоз R/B заднего хода подвергается состоянию, в котором температура CL2-диска тормоза заднего хода равна или выше второго порогового значения в течение контролируемого по времени периода.
[0068] Первый вариант осуществления имеет такую конфигурацию, в которой при выполнении адаптивного управления муфтой посредством задания температуры CL2-диска тормоза R/B заднего хода как высокой температуры, температура муфты управляется таким образом, что она не превышает верхнюю предельную температуру, при которой происходит ухудшение характеристик точки материала фрикционной накладки тормоза R/B заднего хода.
Таким образом, на этапе S14 процесса адаптивного управления муфтой первого варианта осуществления, условие "температура CL2-диска ≤ верхняя предельная температура" (например, 250°C) добавляется в условие разрешения продолжения операции адаптации. Соответственно, адаптивное управление муфтой завершается сразу, когда температура CL2-диска превышает верхнюю предельную температуру, и температура CL2-диска управляется таким образом, что она не превышает верхнюю предельную температуру.
Следовательно, хотя оно представляет собой адаптивное управление муфтой, которое увеличивает температуру муфты до высокотемпературного диапазона, срок службы тормоза R/B заднего хода не сокращается.
[0069] Первый вариант осуществления имеет такую конфигурацию, в которой управление для того, чтобы поддерживать температуру CL2-диска тормоза R/B заднего хода равной температуре в пределах диапазона температур, который равен или выше второго порогового значения и который не превышает верхнюю предельную температуру, продолжается в течение контролируемого по времени периода.
Таким образом, при выполнении адаптивного управления муфтой при поддержании температуры CL2-диска тормоза R/B заднего хода в высокотемпературном состоянии, имеется потребность в том, чтобы не допускать сокращения ресурса муфты при проведении адаптации муфты.
Относительно вышеуказанного, проведение адаптации муфты и обеспечение ресурса муфты достигаются посредством выполнения управления температурой, при котором температура CL2-диска тормоза R/B заднего хода поддерживается равной температуре в пределах диапазона температур в течение контролируемого по времени периода.
[0070] В первом варианте осуществления, в остановленном состоянии, в котором имеется запрос на то, чтобы подавлять начальную толчкообразную вибрацию в гибридном транспортном средстве FR-типа с одним электромотором и двумя муфтами, электромотор/генератор MG задается в качестве стартерного электромотора двигателя, и двигатель Eng запускается посредством зацепления первой муфты CL1. Затем после того, как запуск двигателя Eng завершается, первая муфта CL1 расцепляется одновременно с тем, как вторая муфта CL2 зацепляется в режиме проскальзывания, и MWSC-режим выбирается для выполнения управления величиной проскальзывания второй муфты CL2 посредством управления частотой вращения электромотора, чтобы начинать адаптивное управление пусковой муфтой.
Следовательно, характеристика максимальной выходной мощности электромотора является такой, что крутящий момент электромотора является высоким в области низких частот вращения электромотора, и крутящий момент электромотора уменьшается по мере того, как частота вращения электромотора увеличивается, как проиллюстрировано на фиг. 7. Следовательно, например, когда двигатель Eng запущен посредством электромотора/генератора MG после начала адаптивного управления пусковой муфтой, необходимо обеспечивать предельный крутящий момент из крутящего момента электромотора, который используется для трогания с места, ограничивая верхний предельный крутящий момент (ограничивая выходные характеристики посредством трогания с места). В этом случае, при выполнении управления частотой вращения с использованием крутящего момента при медленном движении в качестве нагрузки, крутящий момент электромотора ограничен посредством предельного крутящего момента пускового элемента и находится в диапазоне управления частотой вращения без запуска Eng, как проиллюстрировано на фиг. 7.
Напротив, посредством начала адаптивного управления пусковой муфтой посредством выбора MWSC-режима, в котором двигатель Eng запускается до начала управления, крутящий момент электромотора не ограничен посредством предельного крутящего момента пускового элемента. Следовательно, по сравнению с диапазоном управления частотой вращения без запуска Eng, диапазон управления частотой вращения с запуском Eng расширен, как проиллюстрировано на фиг. 7. Следовательно, большая величина проскальзывания, которая приводит к уменьшению во время адаптивного управления, обеспечивается в качестве величины проскальзывания посредством управления частотой вращения электромотора.
[0071] В первом варианте осуществления, при адаптивном управлении муфтой, когда адаптивное управление муфтой начинается, величина проскальзывания увеличивается до первой величины проскальзывания, при которой теплообразование выше рассеяния тепла, и первая величина проскальзывания поддерживается до тех пор, пока температура второй муфты CL2 не достигнет первого порогового значения. Когда температура второй муфты CL2 достигает первого порогового значения, величина проскальзывания уменьшается до второй величины проскальзывания, при которой рассеяние тепла и теплообразование уравновешиваются, и вторая величина проскальзывания поддерживается до тех пор, пока контролируемый по времени период не истечет после того, как температура второй муфты CL2 становится равной или превышающей второе пороговое значение, после которого завершается адаптивное управление муфтой.
То есть, адаптивное управление муфтой выполняется так, что режим приведения в движение задается в качестве MWSC-режима, содержащего управление первой величиной проскальзывания для проведения увеличения температуры CL2-диска и управление второй величиной проскальзывания для поддержания температуры CL2-диска в высокотемпературном состоянии.
Таким образом, посредством конфигурирования адаптивного управления муфтой таким образом, что оно имеет две стадии величины проскальзывания CL2, можно адаптировать вторую муфту CL2 при уменьшении времени, требуемого для адаптивного управления муфтой, даже если варьирование выполняется в максимальном диапазоне. Помимо этого, посредством сокращения времени, требуемого для адаптивного управления муфтой, например, можно применять адаптивное управление муфтой на заводе, на котором предусмотрены строгие требования по трудозатратам.
[0072] Далее описываются преимущества.
В устройстве адаптивного управления для пусковой муфты транспортного средства согласно первому варианту осуществления, могут получаться нижеприведенные преимущества.
[0073] (1) Устройство содержит пусковую муфту (вторую муфту CL2, тормоз R/B заднего хода), которая размещается между источником приведения в движение (двигателем Eng, электромотором/генератором MG) и ведущими колесами (левым и правым задними колесами RL, RR) и которая зацепляется в режиме проскальзывания во время трогания с места, и
- средство адаптивного управления муфтой, которое выполняет адаптивное управление муфтой, при котором пусковая муфта (тормоз R/B заднего хода) подвергается состоянию, в котором ее температура составляет предварительно определенную температуру (второе пороговое значение) или выше в течение предварительно определенного периода времени (контролируемого по времени периода), выполняется, по меньшей мере, сразу перед тем, как транспортное средство начинает двигаться (фиг. 5).
Соответственно, можно предотвращать, заранее, возникновение начальной толчкообразной вибрации во время трогания с места.
[0074] (2) Средство адаптивного управления муфтой (фиг. 5) обеспечивает крутящий момент трения и дифференциальное вращение пусковой муфте (тормоз R/B заднего хода), в состоянии остановки транспортного средства, чтобы устанавливать состояние зацепления в режиме проскальзывания, в котором вырабатывается тепло при трении, увеличивает температуру пусковой муфты до предварительно определенной температуры (второго порогового значения) или выше, при которой производится прохождение адаптации материала диска, и пусковая муфта подвергается состоянию, в котором температура муфты (температура CL2-диска) равна или выше предварительно определенной температуры в течение определенного периода времени (контролируемого по времени периода), который требуется для того, чтобы стабилизировать характеристику коэффициента трения пусковой муфты.
Соответственно, помимо преимуществ (1), можно выполнять адаптивное управление муфтой, которое увеличивает температуру пусковой муфты (тормоза R/B заднего хода) при поддержании смонтированного состояния в транспортном средстве без добавления теплового источника для увеличения температуры пусковой муфты.
[0075] (3) Средство адаптивного управления муфтой (фиг. 5) определяет температуру пусковой муфты (тормоза R/B заднего хода) и увеличивает величину проскальзывания при определении того, что определенная температура муфты является низкой, и уменьшает величину проскальзывания при определении того, что определенная температура муфты является высокой.
Соответственно, помимо преимуществ (1) или (2), можно уменьшать время, требуемое для адаптивного управления муфтой, при котором пусковая муфта подвергается состоянию, в котором температура муфты (температура CL2-диска) равна или выше предварительно определенной температуры (второго порогового значения) в течение предварительно определенного времени (контролируемого по времени периода).
[0076] (4) Средство адаптивного управления муфтой (фиг. 5) управляет температурой муфты таким образом, что она не превышает верхнюю предельную температуру, при которой происходит ухудшение характеристик точки материала фрикционной накладки пусковой муфты (тормоза R/B заднего хода) при выполнении адаптивного управления муфтой, посредством задания температуры муфты (температуры CL2-диска) пусковой муфты как высокой температуры.
Соответственно, помимо преимуществ (1)-(3), можно предотвращать сокращение срока службы пусковой муфты (тормоза R/B заднего хода), при выполнении адаптивного управления муфтой, которое увеличивает температуру муфты до высокотемпературного диапазона.
[0077] (5) Средство адаптивного управления муфтой (фиг. 5) выполняет управление для того, чтобы поддерживать температуру пусковой муфты (тормоза R/B заднего хода) равной температуре в пределах диапазона температур, который равен или выше предварительно определенной температуры (второго порогового значения) и который не превышает верхнюю предельную температуру в течение предварительно определенного времени (контролируемого по времени периода).
Соответственно, помимо преимуществ (4), выполнение адаптации муфты и обеспечение ресурса муфты достигаются посредством выполнения управления температурой, при котором температура CL2-диска тормоза R/B заднего хода поддерживается в высокотемпературном диапазоне.
[0078] (6) Транспортное средство представляет собой гибридное транспортное средство (гибридное транспортное средство FR-типа), содержащее в качестве источников приведения в движение, двигатель Eng и электромотор (электромотор-генератор MG), содержащий первую муфту CL1 между двигателем Eng и электромотором и вторую муфту CL2 между электромотором и ведущими колесами (левым и правым задними колесами RL, RR) в качестве пусковой муфты, при этом:
- в остановленном состоянии, в котором имеется запрос на то, чтобы подавлять начальную толчкообразную вибрацию, средство адаптивного управления муфтой (фиг. 5) задает электромотор в качестве стартерного электромотора двигателя с тем, чтобы запускать двигатель Eng посредством зацепления первой муфты CL1; затем, после того, как запуск двигателя Eng завершается, расцепляет первую муфту CL1, одновременно с зацеплением в режиме проскальзывания второй муфты CL2, и выбирает режим приведения в движение (MWSC-режим) для выполнения управления величиной проскальзывания второй муфты посредством управления частотой вращения электромотора, чтобы начинать адаптивное управление пусковой муфтой.
Соответственно, помимо преимуществ (5), можно обеспечивать большую величину проскальзывания, которая приводит к уменьшению во время адаптивного управления в качестве величины проскальзывания посредством управления частотой вращения электромотора.
[0079] (7) Если температура, которая ниже предварительно определенной температуры, задается в качестве первого порогового значения, и предварительно определенная температура задается в качестве второго порогового значения, средство адаптивного управления муфтой (фиг. 5) увеличивает величину проскальзывания до первой величины проскальзывания, при которой теплообразование выше рассеяния тепла, когда адаптивное управление пусковой муфтой начинается, поддерживает первую величину проскальзывания до тех пор, пока температура второй муфты CL2 не достигнет первого порогового значения, и когда температура второй муфты CL2 достигает первого порогового значения, уменьшает величину проскальзывания до второй величины проскальзывания, при которой рассеяние тепла и теплообразование уравновешиваются, поддерживает вторую величину проскальзывания до тех пор, пока не истечет предварительно определенное время (контролируемый по времени период) после того, как температура второй муфты CL2 становится равной или превышающей второе пороговое значение, и завершает адаптивное управление пусковой муфтой после того, как истекло предварительно определенное время.
Соответственно, помимо преимуществ (6), посредством конфигурирования адаптивного управления муфтой таким образом, что оно имеет две стадии величины проскальзывания CL2, можно адаптировать вторую муфту CL2 при уменьшении времени, требуемого для адаптивного управления муфтой, даже если варьирование находится в максимальном диапазоне.
[0080] Устройство адаптивного управления для пусковой муфты транспортного средства настоящего изобретения описано выше на основе первого варианта осуществления, но его конкретные конфигурации не ограничены первым вариантом осуществления, и различные модификации и добавления в проектные решения могут вноситься без отступления от объема изобретения согласно каждому пункту в формуле изобретения.
[0081] В первом варианте осуществления, показан пример, в котором пусковая муфта представляет собой тормоз R/B заднего хода (вторую муфту CL2), который зацепляется в режиме проскальзывания при движении назад посредством выбора R-диапазона, и тормоз R/B заднего хода задается в качестве цели адаптивного управления муфтой. Тем не менее, пусковая муфта может представлять собой тормоз LOW/B низшей передачи (вторую муфту CL2), который зацепляется в режиме проскальзывания при движении в режиме переднего хода посредством выбора D-диапазона, и тормоз LOW/B низшей передачи задается в качестве цели адаптивного управления муфтой. Помимо этого, как тормоз R/B заднего хода, так и тормоз LOW/B низшей передачи могут представлять собой цели адаптивного управления муфтой. Другими словами, любая пусковая муфта, содержащая фрикционные зацепляющие элементы, которые размещаются между источником приведения в движение и ведущими колесами и которые зацепляются в режиме проскальзывания во время трогания с места, может представлять собой цель адаптивного управления муфтой.
[0082] В первом варианте осуществления, показан пример, в котором крутящий момент трения и дифференциальное вращение предоставляются в тормоз R/B заднего хода, в состоянии остановки транспортного средства, чтобы устанавливать состояние зацепления в режиме проскальзывания, в котором вырабатывается тепло при трении, в качестве адаптивного управления муфтой для подвергания пусковой муфты состоянию, в котором температура муфты составляет предварительно определенную температуру или выше в течение предварительно определенного периода времени. Тем не менее, адаптивное управление муфтой может быть таким, что пусковая муфта подвергается состоянию, в котором температура пусковой муфты составляет предварительно определенную температуру или выше в течение предварительно определенного времени, посредством тепла из внешнего источника тепла, в состоянии остановки транспортного средства. В это время, пусковая муфта может находиться в состоянии контакта, содержащем относительное вращение, просто в состоянии прижимного контакта или в расцепленном состоянии.
[0083] В первом варианте осуществления, показан пример, в котором средство адаптивного управления муфтой разделяет величину проскальзывания CL2 на две стадии, на которых величина проскальзывания задается равной первой величине проскальзывания во время начала управления, когда температура муфты является низкой, и задания величины проскальзывания равной второй величине проскальзывания (< первой величины проскальзывания), когда температура муфты равна или выше первого порогового значения. Тем не менее, средство адаптивного управления муфтой может разделять величину проскальзывания на три стадии или более согласно диапазонам температур для температуры муфты (температуры CL2-диска) либо может предоставлять величины проскальзывания бесступенчатым способом, при котором величина проскальзывания постепенно уменьшается по мере того, как температура муфты увеличивается.
[0084] В первом варианте осуществления, показан пример, в котором устройство адаптивного управления настоящего изобретения применяется к гибридному транспортному средству FR-типа, имеющему приводную систему с одним электромотором и двумя муфтами, в которой вторая муфта представляет собой пусковую муфту. Тем не менее, устройство адаптивного управления для пусковой муфты транспортного средства настоящего изобретения может применяться к различным транспортным средствам, таким как гибридные транспортные средства, имеющие другие типы приводных систем, оснащенные двигателем транспортные средства, содержащие полуавтоматическую передачу (AMT), электротранспортные средства и транспортные средства на топливных элементах, содержащие пусковую муфту, и т.д. Вкратце, устройство адаптивного управления может применяться к любому транспортному средству, содержащему пусковую муфту, которая размещается между источником приведения в движение и ведущими колесами, и которая зацепляется в режиме проскальзывания во время трогания с места.
Реферат
Изобретение относится к устройствам адаптивного управления для пусковой муфты транспортного средства, которое автоматически выполняет адаптацию муфты для пусковой муфты, которая зацепляется в режиме проскальзывания при трогании с места. Устройство адаптивного управления для пусковой муфты транспортного средства содержит пусковую муфту и средство адаптивного управления муфтой. Муфта размещена между источником приведения в движение и ведущим колесом и зацепляется в режиме проскальзывания во время трогания с места. Средство адаптивного управления выполняет управление муфтой, по меньшей мере, сразу перед тем, как транспортное средство начинает двигаться. Перед началом движения температура пусковой муфты составляет предварительно определенную температуру или выше в течение предварительно определенного периода времени. Достигается предотвращение вибрации. 7 з.п. ф-лы, 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Гидравлический привод
Комментарии