Станок для лазерной резки материалов - RU2468903C1
Код документа: RU2468903C1
Чертежи

Описание
Область техники, к которой относится изобретение
Данное изобретение относится к лазерной резке материалов, в том числе металлов, и в частности к станку для лазерной резки материалов и к машиночитаемому носителю с программой для управления таким станком.
Уровень техники
В настоящее время лазерная резка материалов, в частности листовых материалов, нашла широкое применение в промышленности. При этом для ускорения процесса лазерной резки применяются станки с двумя лазерными головками, синхронно движущимися с обеих сторон от разрезаемого материала. Для этого может использоваться один лазерный источник, луч которого разделяется соответствующими зеркалами (см., например, патент США №6576870, опубл. 10.06.2003), либо два отдельных лазерных источника (см., например, патент РФ №2139782, опубл. 20.10.1999; патент США №6313433, опубл. 06.11.2001; патенты на полезную модель Китая №2661357, опубл. 08.12.2004, №201257862, опубл. 17.06.2009, №№201338160 и 201338162, оба опубл. 04.11.2009). Такая схема устройства позволяет увеличить скорость резания, особенно в случае сравнительно толстых материалов, но при этом требует точного совмещения лучей по вертикали и синхронного перемещения обеих лазерных головок.
Известен также станок для лазерной резки материалов, в котором два лазерных луча движутся друг за другом для ускорения процесса резки либо формирования сложного профиля прорези (см. заявку на патент США №2010/0044353, опубл. 25.02.2010). Известен и станок, в котором обе головки двигаются синхронно в одну сторону с возможностью регулировки расстояния между ними, что позволяет одновременно изготавливать сразу две одинаковых детали (см. заявку на патент Китая №101036959, опубл. 19.09.2007). Однако и в этом случае жесткая связь лазерных головок ограничивает функциональные возможности станка.
Раскрытие изобретения
Цель настоящего изобретения состоит в расширении функциональных возможностей за счет обеспечения возможности независимой работы двух или более лазерных головок на одном станке.
Для достижения этой цели в первом объекте настоящего изобретения предложен станок для лазерной резки материалов, содержащий: основание; по меньшей мере одну продольную направляющую, каждая из которых установлена на основании; по меньшей мере две поперечных направляющих, каждая из которых установлена на по меньшей мере одной из продольных направляющих с возможностью независимого перемещения по этой продольной направляющей посредством собственного привода продольного перемещения поперечной направляющей; по меньшей мере две лазерных головки, причем на каждой из поперечных направляющих установлена по меньшей мере одна из лазерных головок с возможностью независимого перемещения по этой поперечной направляющей посредством собственного привода горизонтального перемещения и собственного привода вертикального перемещения; вычислительное средство, к которому подключены все приводы горизонтального перемещения лазерной головки, все приводы вертикального перемещения лазерной головки и все приводы перемещения поперечной направляющей и которое выполнено с возможностью независимого программного управления каждым из приводов горизонтального перемещения лазерной головки, приводов вертикального перемещения лазерной головки и приводов продольного перемещения поперечной направляющей; при этом каждый из приводов продольного перемещения поперечной направляющей, каждый из приводов горизонтального перемещения лазерной головки и каждый из приводов вертикального перемещения лазерной головки выполнен в виде линейного электродвигателя, установленного вдоль соответствующей направляющей.
Еще одной особенностью станка по настоящему изобретению является то, что в случае одной продольной направляющей и двух поперечных направляющих с одной лазерной головкой каждая, вычислительное средство выполнено с возможностью шестикоординатного управления обеими лазерными головками.
Для достижения той же цели во втором объекте настоящего изобретения предложен машиночитаемый носитель, предназначенный для непосредственного участия в работе вычислительного средства раскрытого выше станка и содержащий программу, которая при исполнении в упомянутом вычислительном средстве обеспечивает независимое управление каждым из приводов продольного перемещения поперечной направляющей, каждым из приводов горизонтального перемещения лазерной головки и каждым из приводов вертикального перемещения лазерной головки.
При этом в случае, когда станок содержит одну продольную направляющую и две поперечных направляющих с одной лазерной головкой каждая, указанная программа при исполнении в упомянутом вычислительном средстве может обеспечивать шестикоординатное управление обеими лазерными головками.
Краткое описание чертежей
Изобретение иллюстрируется чертежами, на которых одинаковые элементы обозначены одними и теми же ссылочными позициями.
На фиг.1 показан вид в перспективе варианта осуществления станка для лазерной резки материалов согласно настоящему изобретению.
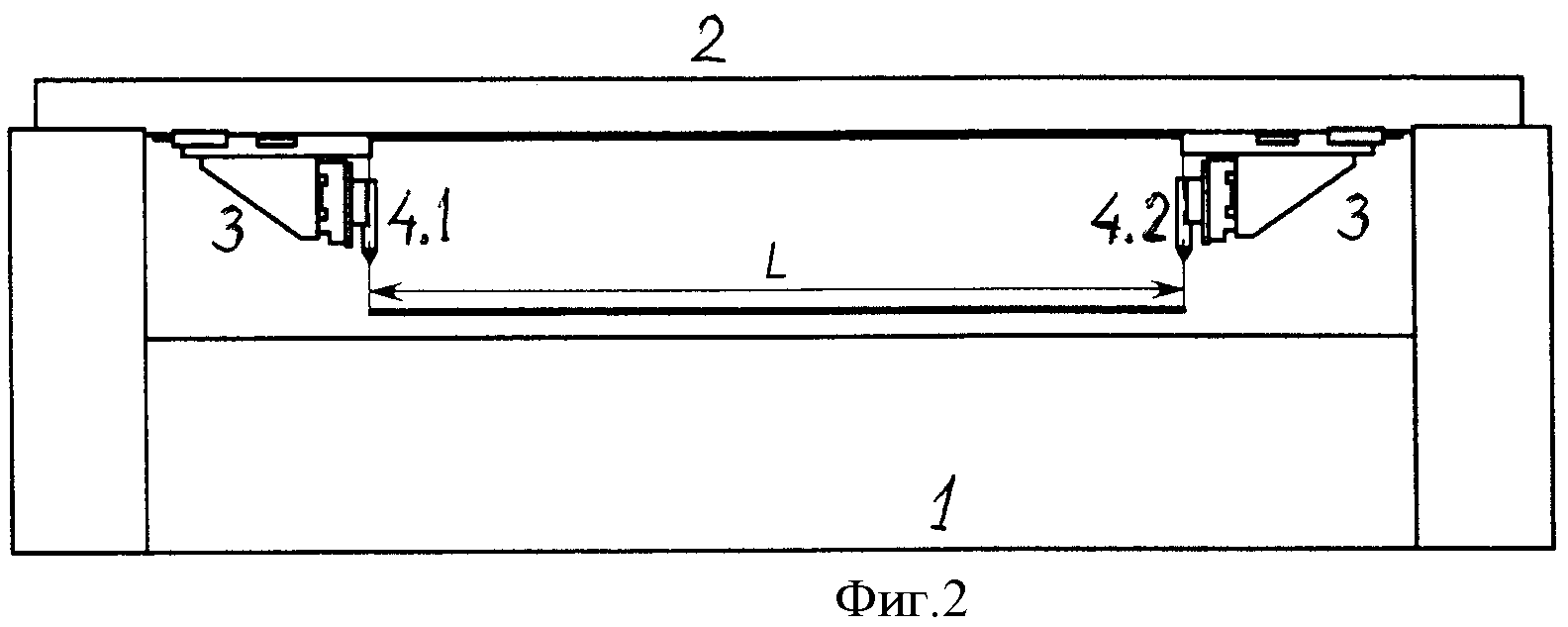
На фиг.2 - вид спереди станка по фиг.1.
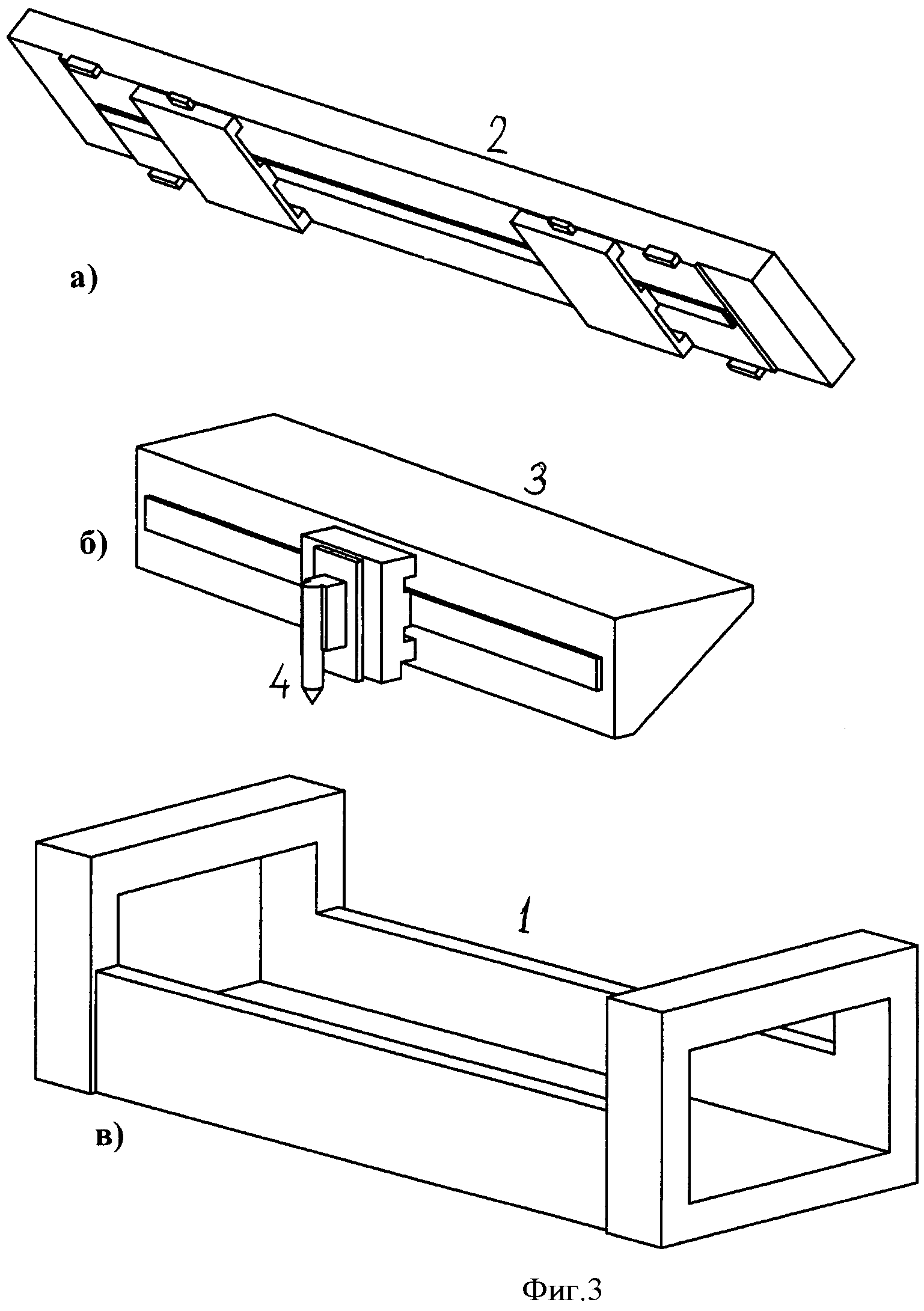
На фиг.3 показаны отдельные составляющие станка по фиг.1.
Подробное описание вариантов осуществления изобретения
Настоящее изобретение может быть реализовано, например, в виде станка для резки листовых материалов, показанного на сопровождающих чертежах.
Как видно из фиг.1, станок для резки материалов по этому варианту осуществления имеет основание 1, на котором жестко закреплена продольная направляющая 2. Следует иметь в виду, что показанный на чертежах вариант осуществления станка по настоящему изобретению является лишь иллюстративным, а не ограничивающим. В частности, продольных направляющих может быть, например, две, которые установлены параллельно одна к другой. Название этим направляющим дано с целью подчеркнуть их протяженность вдоль основания 1, которое, как правило, имеет вытянутую форму.
Как видно из фиг.1-3, на продольной направляющей 2 установлены поперечные направляющие 3. На приведенных чертежах показаны две поперечных направляющих 3, однако их количество может быть и иным. К примеру, на одной продольной направляющей 2 может быть установлено три поперечных направляющих 3. Каждая из поперечных направляющих 3 установлена на соответствующей продольной направляющей 2 с возможностью независимого перемещения по этой продольной направляющей 2. Такое перемещение обеспечивается посредством собственного привода продольного перемещения поперечной направляющей (не показан), который является линейным электродвигателем, установленным вдоль соответствующей продольной направляющей 2.
На чертежах обе показанные поперечные направляющие 3 установлены так, что каждый из приводов продольного перемещения поперечной направляющей предполагается размещенным с нижней стороны продольной направляющей 2 (см. фиг.3б). Это, однако, не является обязательным условием. Например, если поперечная направляющая 3 выполнена со скобой, охватывающей продольную направляющую 2, привод продольного перемещения поперечной направляющей может быть размещен с верхней стороны продольной направляющей 2. Конкретное выполнение подвески продольной направляющей 2 и размещения привода продольного перемещения поперечной направляющей определяются местом расположения и конструктивными особенностями станка, удобством его обслуживания и т.п.
Как видно из чертежей, на каждой поперечной направляющей 3 имеется лазерная головка 4, установленная с возможностью независимого перемещения по этой поперечной направляющей 3. Такое перемещение обеспечивается посредством собственного привода горизонтального перемещения и собственного привода вертикального перемещения (не показаны), каждый из которых выполнен так же, как описанный выше привод продольного перемещения поперечной направляющей. Именно возможность горизонтального перемещения лазерной головки 4 вдоль поперечной направляющей 3 и определило выбор названия последней, потому что такое перемещение происходит поперек направления продольной направляющей 2.
Следует иметь в виду, что на одной поперечной направляющей 3 могут быть установлены две или более лазерных головок 4, имеющих каждая собственный привод горизонтального перемещения и привод вертикального перемещения. Например, две лазерных головки 4 могут располагаться на противоположных плечах одной поперечной направляющей 3.
Как видно на фиг.2, поперечные направляющие 3 могут находиться одна по отношению к другой в таком положении, чтобы соответствующие лазерные головки 4 располагались в пределах максимального разнесения L в продольном направлении. Как правило, это расстояние L для станков резки листовых материалов соответствует (или даже несколько превышает) продольный размер листа 5 разрезаемого материала.
На чертежах не показаны остальные элементы станка по настоящему изобретению, чтобы не затемнять чертежи и не усложнять описание. Разумеется, станок по настоящему изобретению содержит все составляющие, необходимые для выполнения резки материалов, например листового материала 5, показанного на фиг.1. Все такие не показанные составляющие могут быть выполнены, например, согласно патенту РФ на полезную модель №86129 (опубл. 27.08.2009). В частности, лазерная головка 4 может быть такой, как раскрыто в патенте РФ №2266802 (опубл. 27.12.2006).
Использование нескольких (по меньшей мере двух) лазерных головок 4, перемещающихся каждая по своей поперечной направляющей 3, позволяет не просто ускорить процесс резки, но обеспечивает возможность одновременного вырезания нескольких разных деталей или отверстий из одного листа 5 или нескольких листов. Для реализации такой возможности каждая головка должна двигаться по своей траектории (по трем координатам), чему служат как ее собственный привод горизонтального перемещения и собственный привод вертикального перемещения, так и привод продольного перемещения поперечной направляющей соответствующей поперечной направляющей 3. Эти приводы управляются с помощью соответствующего вычислительного средства (не показано), например устройства с числовым программным управлением либо программируемого контроллера, процессора, компьютера и т.п. При этом все приводы горизонтального перемещения лазерной головки и все приводы вертикального перемещения лазерной головки для каждой из лазерных головок 4, и все приводы продольного перемещения поперечной направляющей для каждой из поперечных направляющих 3 подключены к этому вычислительному средству, которое выполнено с возможностью независимого программного управления каждым из приводов горизонтального перемещения лазерной головки, приводов вертикального перемещения лазерной головки и приводов продольного перемещения поперечной направляющей для одновременного выполнения нескольких (по меньшей мере двух) отдельных разрезов.
В частности, когда станок содержит одну продольную направляющую и две поперечных направляющих с одной лазерной головкой каждая, указанная программа при исполнении в упомянутом вычислительном средстве может обеспечивать шестикоординатное управление обеими лазерными головками, т.е. управление по трем координатам для каждой лазерной головки 4.
Для функционирования (программирования) такого вычислительного средства может быть использован машиночитаемый носитель, предназначенный для непосредственного участия в работе этого вычислительного средства и содержащий программу, которая при исполнении в упомянутом вычислительном средстве обеспечивает независимое управление каждым из указанных приводов. Конкретный вид используемой при этом программы определяется как требуемой траекторией резки, так и используемым языком программирования.
Программные управляющие средства, решающие подобные задачи, известны, к примеру, из вышеупомянутого патента РФ №86129. Однако все известные управляющие комплексы, как и все известные станки для лазерной резки, предназначены для резки только одной детали или одного отверстия, тогда как станок по настоящему изобретению дает возможность двум или более лазерным головкам на одном и том же станке работать независимо друг от друга. Это резко повышает скорость обработки и (или) позволяет получать детали (отверстия) разной формы, что расширяет функциональные возможности станка.
Работа станка по настоящему изобретению очевидна из вышеприведенного описания. Лист 5 материала укладывается на основание 1. В вычислительное средство вводится соответствующая программа, в которой учитываются все линии требуемых разрезов, чтобы поперечные направляющие 3 и лазерные головки 4 при своих перемещениях в процессе работы ни в коем случае не сталкивались. Эти перемещения параллельно плоскости листа 5 (т.е. по двум координатам) осуществляются приводами продольного перемещения поперечной направляющей и приводами горизонтального перемещения лазерной головки.
К примеру, если из листа 5 нужно вырезать дверь с окошком, то управляющая резкой программа может быть составлена так, чтобы сначала одна (скажем, левая на фиг.1 и 2) лазерная головка 4.1 прорезала верх двери, а затем переходила к прорезанию одной из боковых сторон. В это же время вторая (правая на фиг.1 и 2) лазерная головка 4.2 сначала вырезает окошко, причем в первую очередь его верхнюю часть, а затем, по завершении прорезания окошка, вторая (правая) лазерная головка 4.2 начинает примерно с середины прорезать боковую сторону (ту, которую уже прорезает первая лазерная головка 4.1) и потом переходит к прорезанию нижней стороны. В это время первая головка 4.1 прекращает прорезать свою боковую сторону, перемещается к другой боковой стороне в том месте, где прорезание было начато второй (правой) лазерной головкой 4.2, и прорезает эту боковую сторону до конца в направлении к уже прорезанной верхней стороне двери. Вторая же лазерная головка 4.2, завершив прорезание нижней стороны двери, переходит к прорезанию той боковой стороны, которая осталась непрорезанной из-за перемещения первой лазерной головки 4.1, и заканчивает прорезание этой боковой стороны. В результате обе поперечные направляющие 3 не сталкиваются в процессе работы, а время резки сокращается более чем вдвое с учетом того, что при резке на обычном станке с одной лазерной головкой требуется некоторое время на непроизводительное перемещение лазерной головки от одного разреза к другому. А в станке по настоящему изобретению при перемещении одной поперечной направляющей 3 с соответствующей лазерной головкой 4 другая лазерная головка 4 может продолжать резку листа 5.
Разумеется, при необходимости несквозного прорезания материала любая лазерная головка 4 может перемещаться по высоте (т.е. по третьей координате) с помощью своего привода вертикального перемещения лазерной головки.
Таким образом, в приведенном варианте осуществления выполняется одновременное шестикоординатное управление двумя лазерными головками, что как раз и обеспечивает расширение функциональных возможностей, а также ускорение процесса резки.
Как уже было отмечено, приведенное описание вместе с чертежами не имеет целью ограничить настоящее изобретение раскрытыми вариантами осуществления. Объем настоящего изобретения определяется приложенной формулой изобретения с учетом эквивалентов входящих в ее независимый пункт признаков.
Реферат
Данное изобретение относится к лазерной резке материалов, в том числе металлов. Его использование позволяет расширить функциональные возможности за счет обеспечения возможности независимой работы двух или более лазерных головок на одном станке. Станок для лазерной резки материалов содержит: основание 1, по меньшей мере одну продольную направляющую 2, по меньшей мере две поперечных направляющих 3, по меньшей мере две лазерных головки 4 и вычислительное средство. Каждая поперечная направляющая 2 установлена на продольной направляющей 2 с возможностью независимого продольного перемещения, а каждая лазерная головка 4 установлена на поперечной направляющей 3 с возможностью независимого горизонтального и вертикального перемещения. Приводы поперечных направляющих и лазерных головок подключены к вычислительному средству, которое выполнено с возможностью независимого программного управления каждым из этих приводов. В результате при двух лазерных головках станок обеспечивает шестикоординатное управление обеими лазерными головками. 1 з.п. ф-лы, 3 ил.
Комментарии