Устройство управления для транспортного средства - RU186187U1
Код документа: RU186187U1
Чертежи


Описание
Полезная модель относится к устройству управления для транспортного средства, в частности рельсового транспортного средства, содержащему систему управления процессами, включающую в себя, по меньшей мере, один центральный блок управления, комплект децентрализованных устройств управления подсистемами и управляющую сеть, к которой подключены блок управления и устройства управления подсистемами.
Известны транспортные средства, в частности рельсовые транспортные средства, с системой управления процессами.
В основе полезной модели лежит задача создания устройства управления, которое отвечало бы высоким требованиям безопасности.
Для этого предложено, что устройство управления содержит отличный от блока управления модуль управления процессами, подключенный к управляющей сети, и отличный от управляющей сети сетевой адаптер, посредством которого модуль управления процессами соединен с устройствами управления подсистемами с возможностью обмена данными. За счет этого может быть создано устройство управления, обладающее высокой степенью дублирования. Особенно предпочтительно существующее устройство управления транспортного средства может быть усовершенствовано таким образом, что устройство управления, включающее в себя систему управления процессами и дополняющие ее, образованные модулем и сетевым адаптером компоненты, будет отвечать высоким требованиям безопасности. Это, в частности в области эксплуатации рельсовых транспортных средств, предпочтительно в отношении затратных процедур допуска, т.к. возможно повышение уровня безопасности, благодаря чему при допуске устройства управления к эксплуатации можно избежать трудоемкого ведения отчетной документации по существующей системе управления процессами. В данном контексте под термином «безопасность» следует понимать, в частности, безопасность, касающуюся защиты пассажиров. В английском языке среди профессионалов такой вид безопасности обозначен термином «Safety». В частности, в области эксплуатации рельсовых транспортных средств под термином «безопасность» следует понимать безопасность в смысле стандартов функциональной безопасности в железнодорожной промышленности, например, в смысле стандартов EN 50126, 50128 и/или 50159. Под термином «уровень безопасности» можно понимать, в частности, уровень целостности безопасности (известный также под сокращением «SIL»). В частности, с помощью предложенного устройства управления можно дополнить систему управления процессами уровнем безопасности SIL 0 или SIL 1 таким образом, что возникающее устройство управления будет иметь уровень безопасности SIL 2.
Система управления процессами предусмотрена предпочтительно для управления основными функциями транспортного средства. К этим основным функциям транспортного средства относятся, в частности, режим движения с этапами трогания, качения и торможения, управление приборами транспортного средства и связь человек-машина для машиниста.
Подсистема эксплуатационного средства – в данном контексте называемая также «подсистема» – обозначает соответственно эксплуатационное средство с присвоенной функциональностью или комплекс эксплуатационных средств, которые в соответствии с присвоенной функциональностью объединены под этим термином. Примерами подсистем являются «двери», «тормоз», «кондиционирование», «безопасность движения поезда», «система информирования пассажиров». При этом устройства управления подсистемами могут быть выполнены в виде управления приводом, управления тормозами, управления дверьми транспортного средства, управления человеко-машинным интерфейсом для ввода информаций машинистом и/или вывода информаций машинисту, управления безопасностью транспортного средства. Особенно с этими основными функциями связаны названные выше аспекты отнесенной к защите пассажиров безопасности (Safety).
Осуществлению основной функции транспортного средства может быть соответственно присвоена, по меньшей мере, одна задача соответствующего устройства управления подсистемой. По сравнению с устройствами управления подсистемами, которые выполняют эти задачи соответствующих локальных подсистем эксплуатационных средств, блок управления рассматривается как вышестоящий или «центральный» блок управления. Чтобы отличить устройства управления подсистемами от блока управления, они называются «децентрализованными» устройствами управления подсистемами. По сравнению с устройствами управления подсистемами блок управления выполнен как центральный блок управления, в частности, за счет того, что он при эксплуатации, по меньшей мере, для одного, преимущественно для каждого из соответственно выполняемых устройствами управления подсистемами задач контролирует эти задачи.
Центральный блок управления может выполнять, например, по меньшей мере, функцию управления шиной в управляющей сети. При этом он управляет обменом данными между подключенными к управляющей сети абонентами шины. Управляющая сеть имеет, в частности, шинную топологию, при которой для обмена данными реализовано точечно-многоточечное соединение.
Кроме того, по сравнению с устройствами управления подсистемами блок управления может быть выполнен в виде входного-выходного контроллера. Это подходит, в частности, при выполнении управляющей сети с топологией, при которой для обмена данными реализовано точечно-многоточечное соединение от одного абонентского вывода к другому абонентскому выводу.
Управляющая сеть выполнена предпочтительно в виде сети Ethernet. В одном особом варианте управляющей сетью может быть сеть Profinet. Кроме того, управляющая сеть может иметь кольцевую топологию.
Модуль управления процессами преимущественно физически отличается от блока управления. В частности, блок управления и модуль могут быть расположены в отделяемых друг от друга корпусах. Это предпочтительно в связи с дооборудованием существующей системы управления процессами. Кроме того, сетевой адаптер преимущественно физически отличается от управляющей сети. При этом управляющая сеть и сетевой адаптер содержат преимущественно разные провода.
Согласно одному предпочтительному варианту, модуль управления процессами предусмотрен для передачи на устройство управления подсистемой, по меньшей мере, одной информации для отвечающего безопасности выполнения задачи устройством управления подсистемой. Под «отвечающим безопасности» выполнением задачи следует понимать выполнение согласно соответствующему задаче правилу безопасности, в частности согласно, по меньшей мере, одному действующему стандарту безопасности. Кроме того, такую информацию можно назвать «релевантной для безопасности» информацией. В частности, она характерна для определенного эксплуатационного состояния транспортного средства. Например, она может представлять собой информацию о скорости, характерную для скорости транспортного средства.
В этой связи посредством модуля управления процессами может осуществляться резервная передача определенной, релевантной для безопасности информации на устройство управления подсистемой. Если передача релевантной для безопасности информации об эксплуатационном состоянии транспортного средства на устройство управления подсистемой уже предусмотрена по управляющей сети, то, кроме того, посредством модуля управления процессами на устройство управления подсистемой может осуществляться передача иной, релевантной для безопасности информации, которая характерна для того же эксплуатационного состояния. Благодаря этим информациям можно достичь создания по-разному информаций об определенном эксплуатационном состоянии.
Кроме того, предложено, что модуль управления процессами предусмотрен для определения информации перед ее передачей в зависимости от выполняемой задачи. За счет этого можно достичь быстрого, независимого от типичного вычислительного времени центрального блока управления создания информации. При этом модуль управления процессами запрограммирован предпочтительно для определения самому, по меньшей мере, одной требуемой для выполнения задачи, релевантной для безопасности информации. При этом модуль управления процессами целесообразно посредством собственного вычислительного блока и блока памяти определяет, какая релевантная для безопасности информация требуется для выполняемой устройством управления подсистемой задачи. После определения информации может осуществляться ее регистрация модулем управления процессами.
Далее предпочтительно, если модуль управления процессами предусмотрен для регистрации информации перед ее передачей через сетевой адаптер и/или для передачи информации на устройство управления подсистемой через сетевой адаптер. За счет этого можно достичь быстрой регистрации и/или быстрой передачи информации. При этом модуль управления процессами выполняет предпочтительно – в отличие от сенсорного блока и/или дополнительного устройства управления подсистемой – функцию входного модуля и/или – по сравнению с касающимся задачи устройством управления подсистемой – функцию выходного модуля. При этом он предусмотрен предпочтительно для ввода через сетевой адаптер, по меньшей мере, одной переменной из блока управления и/или дополнительного устройства управления подсистемой и/или для вывода через сетевой адаптер переменной для устройства управления подсистемой. В случае этой функции вывода модуль управления процессами целесообразно предусмотрен для создания посредством сетевого адаптера дополнительного к управляющей сети канала связи для передачи, по меньшей мере, одной переменной на устройство управления подсистемой. В одном предпочтительном варианте, в котором происходит по-разному создание информаций об определенном эксплуатационном состоянии, одна из информаций передается на устройство управления подсистемой предпочтительно через сетевой адаптер.
Предпочтительной модульности в построении устройства управления можно достичь, если модуль управления процессами и устройства управления подсистемами подключены к управляющей сети через идентичные интерфейсы. Благодаря этому можно достичь простого дополнения, в частности дооборудования, системы управления процессами. Это дооборудование требует, тем самым, небольших изменений в имеющейся системе управления процессами. В частности, влияние подключения к системе управления процессами на аспекты допуска таковы, что за счет подключения можно избежать релевантных для допуска изменений системы. Интерфейсы для устройств управления подсистемами и модуля предпочтительно едины с точки зрения техники связи и/или физически. При этом интерфейсы могут быть идентичными с центральным блоком управления, по меньшей мере, согласно коммуникационному протоколу, в частности в отношении обмена данными. Предпочтительно этим можно достичь подключения модуля управления процессами к управляющей сети таким образом, что блок управления будет рассматривать его функционально, в частности с точки зрения техники связи, как децентрализованное устройство управления подсистемой. Интерфейсы идентичны преимущественно в отношении возможности физического подключения.
Высокий уровень безопасности может быть достигнут далее, если модуль управления процессами предусмотрен для выполнения контроля совпадения в отношении информации, полученной по управляющей сети, и информации, полученной через сетевой адаптер. В частности, с помощью модуля можно проверить правильность и/или надежность имеющейся в системе управления процессами информации, в частности релевантной для безопасности информации. Если этой информацией является первая, характерная для эксплуатационного состояния транспортного средства информация, то контроль совпадения может включать в себя посредством модуля регистрацию той же информации и/или регистрацию второй, иной и характерной для эксплуатационного состояния транспортного средства информации.
Целесообразно модуль управления процессами предусмотрен для проверки, по меньшей мере, одного эксплуатационного состояния за счет обработки первой, полученной по управляющей сети информации, касающейся устройства управления подсистемой, и второй, полученной через адаптер информации, касающейся устройства управления подсистемой, благодаря чему может быть достигнута высокая безопасность в эксплуатации транспортного средства.
В одном предпочтительном варианте сетевой адаптер предусмотрен, по меньшей мере, для цифровой передачи. При этом модуль управления процессами содержит предпочтительно, по меньшей мере, один интерфейсный блок с предусмотренным для цифрового ввода данных входным интерфейсом и предусмотренными для цифрового вывода данных выходными интерфейсами, к которым могут подключаться провода сетевого адаптера, предусмотренные для цифровой передачи.
В частности, предложено, что сетевой адаптер содержит Ethernet-соединения.
Кроме того, конструктивно простого объединения можно достичь, если устройство управления содержит шину транспортного средства, которая соединяет управляющую сеть с дополнительной управляющей сетью транспортного средства, причем сетевой адаптер образован шиной транспортного средства. Если транспортное средство выполнено в виде группы вагонов, в частности в случае рельсового транспортного средства, то управляющие сети приданы, в частности, по меньшей мере, разным вагонам. Кроме того, группы сцепленных вагонов могут быть определены соответственно как единица управления процессами (известная также под термином «Consist»), причем управляющие сети приданы разным единицам. В названных случаях шина транспортного средства проходит по нескольким вагонам транспортного средства, в частности по всему транспортному средству. При необходимости, шина транспортного средства может соединять несколько идентичных, сцепленных между собой транспортных средств. Шина транспортного средства может быть выполнена, например, в соответствии со стандартом, например, в виде WTB-шины («Wire Train Bus» - проводная поездная шина) или ЕТВ-шины («Ethernet Train Backbone» - поездная магистральная шина Ethernet).
Надежной регистрации эксплуатационной переменной можно далее достичь, если устройство управления содержит комплект сенсорных блоков, подключенных к управляющей сети и модулю управления процессами.
Дальнейшего повышения уровня безопасности устройства управления можно достичь за счет того, что модуль управления процессами содержит вычислительный блок, включающий в себя, по меньшей мере, два процессора. Особенно предпочтительно процессоры могут быть разной конструкции и/или по-разному программируемыми.
При этом высокая безопасность в отношении обмена данными может быть достигнута, если первый процессор предусмотрен для выполнения коммуникационных задач, а второй процессор – для выполнения прочих задач. При этом коммуникационная задача включает в себя целесообразно, по меньшей мере, управление обмен данными с подключенными к модулю блоками.
Предпочтительно, если модуль управления процессами предусмотрен для инициирования обусловленного безопасностью торможения транспортного средства. Для этого существует преимущественно прямая связь модуля управления процессами с системой управления тормозами, в частности главными тормозными клапанами. Торможение может быть инициировано модулем, в частности, тогда, когда упомянутый выше контроль совпадения и/или проверка не удались. За счет торможения транспортное средство может быть приведено в безопасное состояние.
Пример осуществления полезной модели поясняется со ссылкой на чертежи, на которых представлено следующее:
фиг. 1 - схематичный вид сбоку рельсового транспортного средства с подсистемами эксплуатационных средств;
фиг. 2 - устройство управления рельсового транспортного средства по фиг. 1 с системой управления процессами и модулем управления процессами;
фиг. 3 - схематичный вид системы управления процессами, модуля и создаваемых между ними коммуникационных соединений;
фиг. 4 - система управления процессами и модуль, подключенный к блоку отображения и устройству ввода рельсового транспортного средства;
фиг. 5 - подробный вид модуля управления процессами.
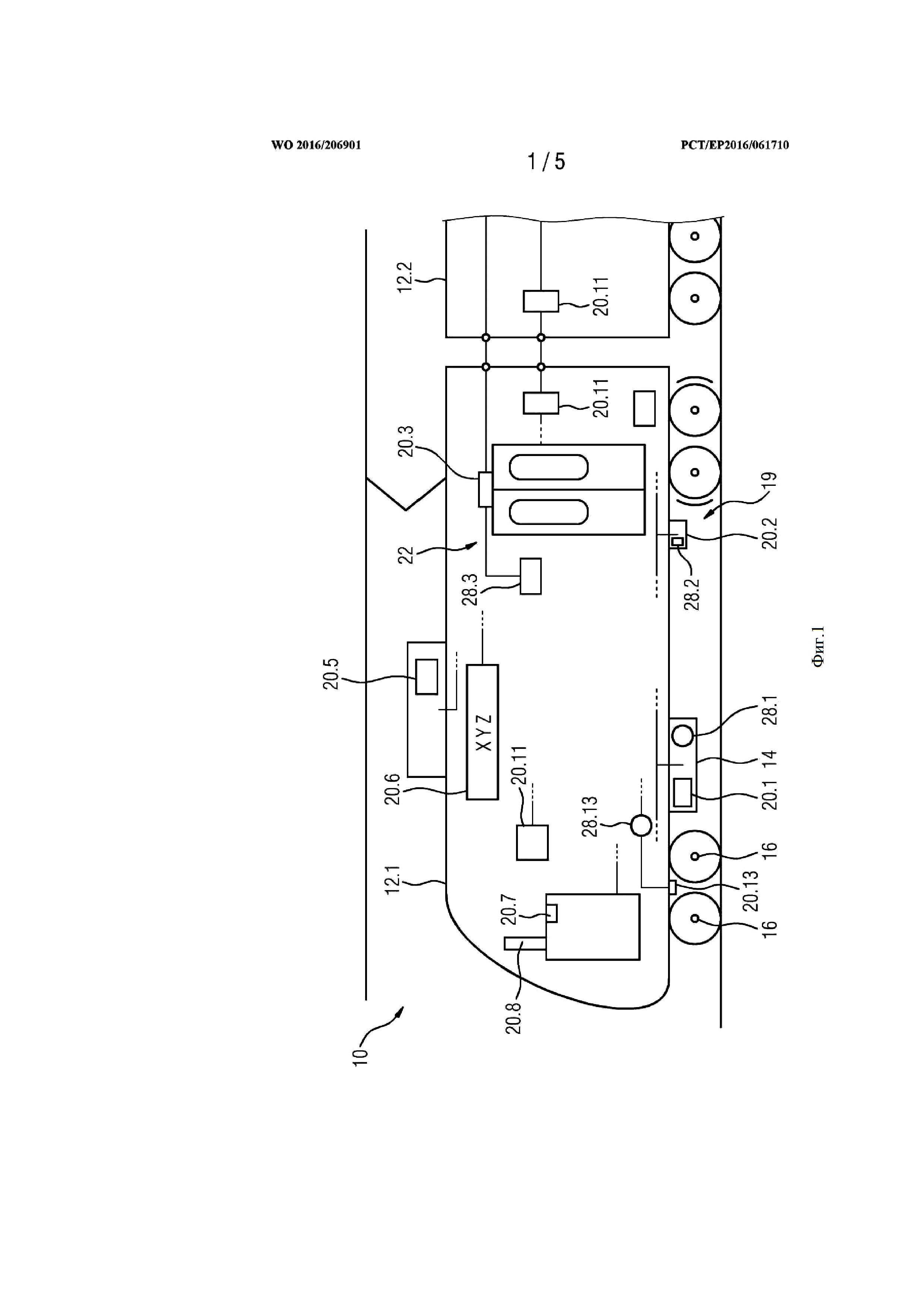
На фиг. 1 изображен схематичный вид сбоку рельсового транспортного средства 10. Оно выполнено в виде группы нескольких вагонов 12.1, 12.2 и т.д., которые механически сцеплены между собой и образуют поездную единицу. В рассматриваемом варианте рельсовое транспортное средство 10 выполнено в виде моторвагонного поезда. Для этого, по меньшей мере, один из вагонов группы снабжен приводным блоком 14 для привода, по меньшей мере, одной оси 16. Приводной блок 14 содержит электродвигатель (не показан). В другом варианте возможно, чтобы рельсовое транспортное средство 10 было выполнено в виде отдельного моторвагона. Кроме того, рельсовое транспортное средство 10 может содержать группу лишенных привода пассажирских вагонов, которая сцеплена, по меньшей мере, с одной тяговой подвижной единицей, например, локомотивом.
Известным образом рельсовое транспортное средство 10 содержит определенное число эксплуатационных средств, которые обеспечивают эксплуатацию рельсового транспортного средства 10. Они могут быть выполнены, в частности, в виде блока управления, сенсорного блока и/или исполнительного блока.
Изображенные на фиг. 1 в качестве примера эксплуатационные средства 20 выполнены в виде эксплуатационных средств 20.1 приводного блока 14, эксплуатационных средств 20.2 тормозного устройства 19, эксплуатационных средств 20.3, 20.4 дверного устройства, эксплуатационных средств 20.5 установки кондиционирования, эксплуатационных средств 20.6 системы информирования пассажиров, эксплуатационных средств 20.7, 20.8 человеко-машинного интерфейса для машиниста тяговой подвижной единицы, эксплуатационных средств 20.11 устройства экстренного торможения и эксплуатационных средств 20.13 системы обеспечения безопасности движения поезда.
«Подсистема эксплуатационных средств» называемая далее также «подсистема» – обозначает соответственно группу эксплуатационных средств 20, которые в соответствии с присвоенной функциональностью объединены под этим термином. Примерами подсистем являются «двери», «тормоз», «кондиционирование», «безопасность движения поезда», «система информирования пассажиров». В качестве систем обеспечения безопасности движения поезда возможны, например, PZB («Punktförmige Zugbeeinflussung» - точечное воздействие на движение поездов), LZB («Linienzugbeeinflussung» - линейное воздействие на движение поездов), ETCS («European Train Control System» - европейская система управления движением поездов).
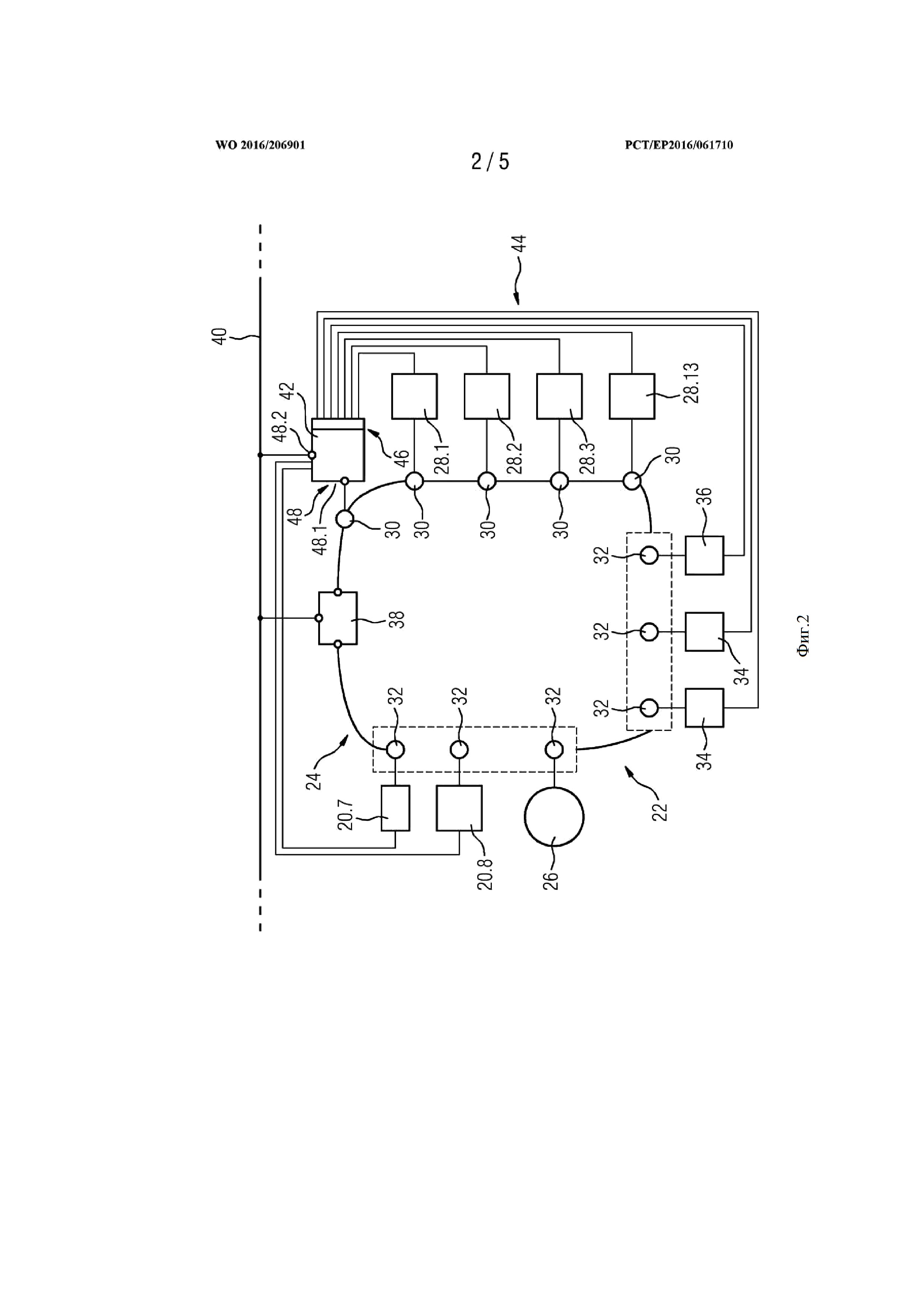
На фиг. 2 в схематичном виде изображена система 22 управления процессами рельсового транспортного средства 10. Она включает в себя управляющую сеть 24, имеющую кольцеобразную сетевую структуру. Она выполнена в виде сети Ethernet, в частности по стандарту Profinet. Кроме того, система 22 содержит блок 26 управления, подключенный к управляющей сети 24. Упомянутые выше подсистемы эксплуатационных средств содержат соответственно, по меньшей мере, одно устройство 28 управления подсистемой, которое предусмотрено для управления одним или несколькими эксплуатационными средствами соответствующей подсистемы эксплуатационных средств. Устройства 28 управления подсистемами предусмотрены соответственно для управления задачей в сочетании с присвоенной соответствующей подсистеме функциональностью. На фиг. 2 в качестве устройства 28.1 управления подсистемой показано управление приводом, в качестве устройства 28.2 управления подсистемой – управление торможением, в качестве устройства 28.3 управления подсистемой – управление системой дверей транспортного средства, а в качестве устройства 28.13 управления подсистемой – управление системой обеспечения безопасности движения. Эти управления показаны также на фиг. 1.
Устройства 28 управления подсистемами подключены к управляющей сети 24 соответственно посредством интерфейса 30. Интерфейсы 30 включены в сетевую структуру. Кроме того, в сетевой структуре расположены дополнительные интерфейсы 32. К ним подключены комплект сенсорных блоков 34 и исполнительный блок 36. К дополнительному интерфейсу 32 подключены блок 26 управления и эксплуатационное средство 20, выполненное в виде блока отображения человеко-машинного интерфейса. К управляющей сети 24 также подключено предусмотренное в виде устройства ввода поездных данных эксплуатационное средство 20.7. Интерфейсы 30, 32 имеют соответственно переключающую функциональность.
Интерфейсы 30, 32 выполнены в управляющей сети 24 соответственно в виде входных-выходных модулей, посредством которых происходит обмен данными между соответствующим абонентом, в частности приданным устройством 28 управления подсистемой, и центральным блоком 26 управления. По сравнению с устройствами 28 управления подсистемами, которые выполняют локальные задачи соответствующих подсистем эксплуатационных средств, блок 26 управления рассматривается как «центральный» блок управления. Чтобы отличить устройства 28 управления подсистемами от блока 26 управления, они называются «децентрализованными» устройствами 28 управления подсистемами. По сравнению с устройствами 28 управления подсистемами блок 26 управления выполнен в виде входного-выходного контроллера, который для каждой их соответственно выполняемых устройствами 28 управления подсистемами задач автоматизации контролирует эти задачи.
По своей функции создания коммуникации между соответствующим подключенным идентичны. Физически они могут принимать разные формы, специфические в отношении функции подключенного абонента. Интерфейсы 30 могут быть выполнены, например, в виде сменной платы вычислительного блока, а интерфейсы 32 – в частности, в виде компонентов устройств управления с программируемой памятью. Объединение нескольких интерфейсов 32 в одном модуле или расположение этих интерфейсов 32 в общем корпусе обозначено штриховой линией.
Управляющая сеть 24 включает в себя также блок 38 подключения шины транспортного средства, который образует интерфейс между управляющей сетью 24 и шиной 40 транспортного средства. Шина 40 транспортного средства проходит по нескольким вагонам 12, в частности по всему рельсовому транспортному средству 10, и соединяет управляющую сеть 24 с дополнительной аналогичной управляющей сетью рельсового транспортного средства 10 (не показана), при необходимости, с управляющей сетью сцепленного с ним идентичного рельсового транспортного средства. Шина 40 транспортного средства может быть выполнена, например, в виде шины Ethernet. Блок 38 подключения шины транспортного средства может быть оснащен функциональностью межсетевого интерфейса, посредством которой управляющая сеть 24 в качестве подсети подключена к вышестоящей поездной сети.
К управляющей сети 24 подключен модуль 42 управления процессами. Физически он отличается от управляющей сети 24. В частности, блок 26 управления и модуль 42 расположены в разных корпусах. Кроме того, модуль 42 посредством сетевого адаптера 44 соединен с возможностью обмена данными с устройствами 28 управления подсистемами и сенсорными блоками 34. Этот сетевой адаптер 44 физически отличается от управляющей сети 24. В частности, сетевой адаптер 44 содержит провода, отличающиеся от проводов управляющей сети 24.
Модуль 42 управления процессами содержит вычислительный блок 45 (фиг. 3-5), интерфейсный блок 46 и блок 48 подключения шины.
Блок 48 подключения шины содержит первый вывод 48.1, через который модуль 42 может подключаться к управляющей сети 24. Вывод 48.1 подключен к управляющей сети 24 через интерфейс 30. Возможным было бы также подключение через интерфейс 32. Таким образом, модуль 42 и устройства 28 управления подсистемами подключены к управляющей сети 24 через идентичные интерфейсы.
В частности, этим можно достичь того, что модуль 42 будет рассматриваться блоком 26 управления функционально как устройство управления подсистемой.
Через второй вывод 48.2 модуль 42 подключен к шине 40 транспортного средства. Могут быть предусмотрены один или несколько дополнительных выводов 48.3, через которые модуль 42 может подключаться к дополнительным шинам 50.1, 50.2 (фиг. 3-5), например, к CАN-шине («Control Area Network» - локальная сеть контроллеров) или MVB-шине («Multifunction Vehicle Bus» - многофункциональная поездная шина).
Как видно на фиг. 5, интерфейсный блок 46 содержит предусмотренные для цифрового ввода данных входные интерфейсы 46.1 и предусмотренные для цифрового вывода данных выходные интерфейсы 46.2. Дополнительно интерфейсный блок 46 может содержать предусмотренные для аналогового ввода данных входные интерфейсы 46.3 и предусмотренные для аналогового вывода данных выходные интерфейсы 46.4.
Модуль 42 соединен преимущественно через цифровые интерфейсы 46.1, 46.2 и провода сетевого адаптера 44 с устройствами 28 управления подсистемами с возможностью обмена данными. Для этого сетевой адаптер 44 оснащен, по меньшей мере, проводами, предусмотренными для цифровой передачи данных. В частности, провода могут быть образованы кабелями Ethernet.
Функция модуля 42 более подробно поясняется на первом примере выполнения.
Этот пример касается подсистемы «двери», которая содержит подключенное к управляющей сети 24 устройство 28.3 управления подсистемой. Двери рельсового транспортного средства 10 могут открываться машинистом только тогда, когда оно остановилось. Согласно одному требованию безопасности, регистрация эксплуатационного состояния «состояние остановки» рельсового транспортного средства 10 должна по-разному происходить посредством устройства 28.3 управления подсистемой. Первая, созданная для устройства 28.3 управления подсистемой, переменная соответствует скорости рельсового транспортного средства 10. Она может передаваться по управляющей сети 24 после регистрации сенсорным блоком 34 и/или после передачи посредством системы обеспечения безопасности движения поезда на устройство 28.3 управления подсистемой. Второй, созданной для устройства 28.3 управления подсистемой, переменной является параметр, который характеризует эксплуатационное состояние устройства 28.1 управления подсистемой, соответствующего устройству управления приводом. Примеры должны определяться по переменной «эксплуатационное состояние», в котором устройство управления приводом не подает никаких тактовых команд для компонентов силовой электроники приводного блока 14.
Для этого модуль 42 самостоятельно определяет по имеющейся в распоряжении информации системы 22 управления процессами информацию, необходимую для отвечающего безопасности выполнения задачи устройства 28.3 управления подсистемой открывание дверей), и определяет, что требуется переменная по тактовому состоянию устройства управления приводом. Для создания переменной по этой информации служит модуль 42, который через сетевой адаптер 44 соединен с устройством 28.1 управления подсистемой с возможностью обмена данными. Он регистрирует через сетевой адаптер 44 переменную устройства 28.1 управления подсистемой и передает ее через сетевой адаптер 44 на устройство 28.3 управления подсистемой. Если скорость «0», а устройство 28.3 управления подсистемой находится в эксплуатационном состоянии «отсутствие тактирования», то оно может привести систему дверей транспортного средства в состояние, в котором они могут открыться.
Следовательно, устройство 28.3 управления подсистемой принимает две переменные по двум разным, физически отличающимся друг от друга каналам передачи. Поэтому модуль 42 создает посредством сетевого адаптера 44 дополнительный к управляющей сети 24 коммуникационный канал, по которому переменная «эксплуатационное состояние устройства управления приводом» передается на устройство 28.3 управления подсистемой. Открывание дверей тесно связано с защитой пассажиров. Следовательно, процессы устройства 28.3 управления подсистемой должны отвечать критическим для безопасности требованиям, которые на языке специалистов называются также «Safety»-требования. Таким образом, лежащие в основе открывания дверей переменные являются в этой связи критическими для безопасности информациями, которые по управляющей сети 24 и посредством модуля 42 передаются через сетевой адаптер 44 на устройство 28.3 управления подсистемой.
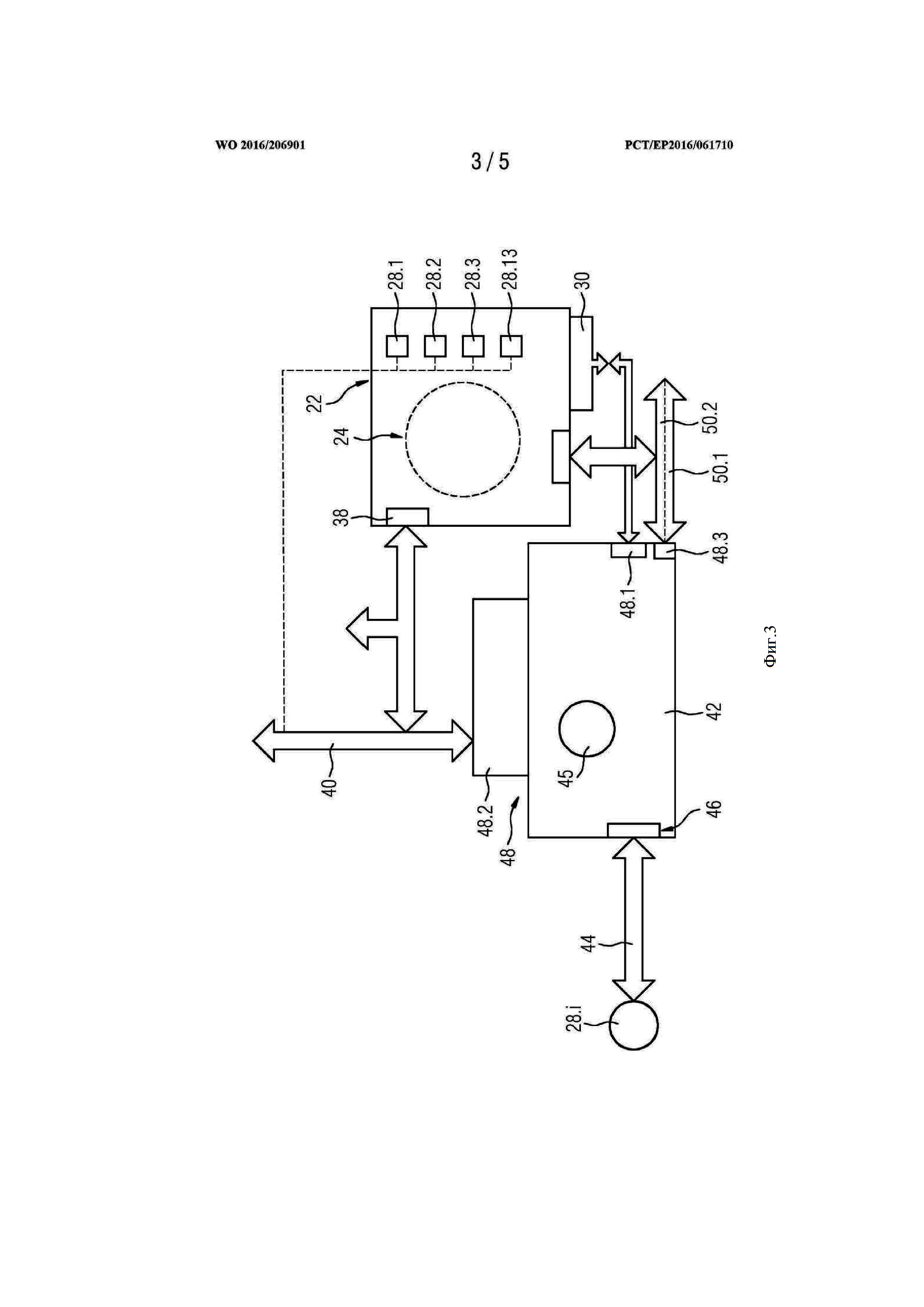
На фиг. 3 в схематичном виде изображены модуль 42, система 22 управления процессами, шина 40 транспортного средства и имеющиеся между ними соединения.
Модуль 42 через интерфейс 30 подключен к системе 22 управления процессами. К тому он через интерфейсный блок 46 и сетевой адаптер 44 соединен с устройствами 28 управления подсистемами с возможностью обмена данными. Подключение модуля 42 к поездной шине 40 и к другим шинам 50.1, 50.2, например, CAN-шине и MVB-шине, осуществляется через блок 48 подключения шин. Система 22 управления процессами через блок 38 подключения поездной шины управляющей сети 24 и через подходящие интерфейсы подключена к другим шинам 50.1, 50.2.
В частности, на фиг. 3 видно, что модуль 42 и сетевой адаптер 44 могут использоваться в виде системы дооборудования в комбинации с существующей системой 22 управления процессами.
Кроме того, на фиг. 3 виден вариант, в котором в качестве альтернативы или дополнительно провода шины 40 транспортного средства образуют составную часть сетевого адаптера 44. При этом коммуникация между модулем 42 и устройством 28 управления подсистемой может осуществляться через шину 40 транспортного средства. Это обозначено штриховой линией.
На фиг. 4 поясняется другой пример выполнения. На ней изображены система 22 управления процессами, модуль 42, устройство 28.13 управления подсистемой системы обеспечения движения поезда, выполненный в виде датчика скорости сенсорный блок 34 и эксплуатационные средства 20.7, 20.8 человеко-машинного интерфейса, которые соответствуют устройству ввода поездных данных и блоку отображения.
Как уже описано выше, модуль 42 через свой вывод 48.1 и интерфейс 30 подключен к системе 22 управления процессами. Выполненное в виде устройства ввода эксплуатационное средство 20.7 подключено к управляющей сети 24, а через сетевой адаптер 44 – к модулю 42 (см. также фиг. 2). Это относится также к выполненному в виде блока отображения эксплуатационному средству 20.8.
Подключение эксплуатационных средств 20.7, 20.8 осуществляется, в частности, посредством блока 52 подключения приборов, который отличается от интерфейсного блока 46. Например, соединения с эксплуатационными средствами 20.7, 20.8 реализованы через последовательные интерфейсы. Соединение модуля 42 с устройством 20.13 управления подсистемой осуществляется через цифровой интерфейс 46.1. Соединение модуля 42 с сенсорным блоком 34 осуществляется, например, через аналоговый интерфейс 46.3.
Модуль 42 предусмотрен для проверки ввода поездных данных через эксплуатационное средство 20.7. Для этого он выполняет, как поясняется ниже, контроль совпадения. Через созданное сетевым адаптером 44 прямое соединение модуля 42 с эксплуатационным средством 20.7 можно с помощью модуля 42 регистрировать введенное оператором значение. Кроме того, модуль 42 через подключение к управляющей сети 24 может получать значение, которое было зарегистрировано системой 22 управления процессами при вводе оператором. Таким образом, с помощью модуля можно проконтролировать, совпадают ли между собой обе полученные информации.
Кроме того, модуль служит для проверки регистрации скорости транспортного средства. Для этого он так выполняет контроль совпадения. Через подключение к управляющей сети 24 он получает первую информацию о скорости, которая содержится в системе 22 управления процессами и должна учитываться для выполнения критических для безопасности задач. Кроме того, он получает через сетевой адаптер 44 информацию о скорости от устройства 20.13 управления подсистемой. Сравнив информации о скорости, модуль 42 может выполнить контроль совпадения. Дополнительно от сенсорного блока 34 может быть получена другая информация о скорости в качестве дополнительной информации. Например, сенсорный блок 34 может быть выполнен в виде радарного датчика.
Далее модуль 42 управления процессами предусмотрен для проверки отображения значения скорости посредством эксплуатационного средства 20.8. Для этого он получает информацию о скорости по управляющей сети 24 системы 22 управления процессами. Она соответствует информации о скорости, которая передается по управляющей сети 24 на эксплуатационное средство 20.8. Через сетевой адаптер 44 модуль 42 получает значение скорости, отображаемое эксплуатационным средством 20.8. Последнее содержит дисплей 54 и дисплейную память 56, которая соединена с возможностью обмена данными с интерфейсом 58 для подключения к сетевому адаптеру 44. Значение скорости отбирается из дисплейной памяти и передается через сетевой адаптер 44 на модуль 42. Тот сравнивает полученную от системы 22 информацию о скорости с полученным от эксплуатационного средства 20.8 через сетевой адаптер 44 значением скорости.
Если один из описанных выше контролей совпадения или одна из описанных выше проверок не удалась из-за того, что было установлено несовпадение между двумя сравниваемыми значениями, то модуль 42 управления процессами инициирует обусловленное безопасностью торможение транспортного средства. Это осуществляется за счет прямой связи модуля 42 с устройством 60 управления тормозами. Последнее выполнено в виде пары резервных главных тормозных клапанов пневматического тормозного устройства рельсового транспортного средства 10.
На фиг. 5 изображен подробный вид модуля 42 управления процессами. Во избежание ненужных повторений нижеследующий текст направлен на признаки модуля 42, не упомянутые в предыдущем описании.
Вычислительный блок 45 модуля 42 содержит два процессора 62, 64 (см. также фиг. 4). Они выполнены разного конструктивного типа и могут по-разному программироваться. Шинные системы обоих процессоров внутри разделены и располагают отдельным протоколом, чтобы вызывать необходимое с точки зрения техники безопасности разделение. Управление коммуникацией модуля 42 с подключенными блоками осуществляется посредством процессора 64, который предназначен для выполнения этой задачи. Кроме того, модуль 42 содержит интеллектуальную систему управления RAM/EPROM.
Реферат
Полезная модель относится к устройству управления для транспортного средства, в частности рельсового транспортного средства (10), содержащего систему (22) управления процессами, включающую в себя, по меньшей мере, один центральный блок (26) управления, комплект децентрализованных устройств (28) управления подсистемами и управляющую сеть (24), к которой подключены блок (26) управления и устройства (28) управления подсистемами. Чтобы создать устройство управления, которое отвечало бы высоким требованиям безопасности, предложено, что устройство управления содержит отличный от блока (26) управления модуль (42) управления процессами, подключенный к управляющей сети (24), и отличный от управляющей сети (24) сетевой адаптер (44), посредством которого модуль (42) управления процессами соединен с устройствами (28) управления подсистемами с возможностью обмена данными.
Комментарии