Способ и система для регулирования выравнивания датчика перемещения на технологических управляющих клапанах - RU2693149C2
Код документа: RU2693149C2
Чертежи



Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к калибровке датчика и, в частности, к способам и системам для регулирования выравнивания датчика перемещения, применяемого в технологических управляющих клапанах.
УРОВЕНЬ ТЕХНИКИ
В технологических управляющих установках и системах управляющие клапаны применяют для решения самых разнообразных задач. Как правило, управляющие клапаны применяют для управления течением продукта, при этом они функционируют как регулируемое отверстие или проход. Управляющий клапан, как правило, автоматизируют с помощью исполнительного механизма и дистанционно управляемого прибора, который осуществляет обмен данными между технологической управляющей вычислительной машиной и исполнительным механизмом для управления изменением течения в клапане для достижения требуемого алгоритма управления. Датчики перемещения, которые измеряют положение клапана, играют критическую роль в поддержании точности технологического управления.
Когда технологическая управляющая вычислительная машина выдает команду изменения течения, дистанционно управляемый прибор должен определить текущее положение клапана и выполнить соответствующее корректирующее действие посредством исполнительного механизма. Типовой исполнительный механизм приводят в действие с помощью источника сжатого воздуха, которым управляют с помощью дистанционно управляемого прибора. Например, в мембранно-пружинном исполнительном механизме, применяемом в клапане с линейным или поступательным движением штока, изменения давления воздуха, приложенные к широкой мембране, вызывают перемещение или смещение мембраны. Шток исполнительного механизма прикреплен к мембране, которая, в свою очередь, соединена с плунжером клапана. Изменяя давление воздуха на мембране, дистанционно управляемый прибор может непосредственно позиционировать плунжер клапана и, таким образом, управлять течением через управляющий клапан. Для надлежащего управления течением прибор всегда должен иметь данные о том, где находится плунжер клапана, и куда он должен переместиться в ответ на команду. Этого достигают путем прикрепления датчика перемещения между дистанционно управляемым прибором и штоком исполнительного механизма. Выход датчика перемещения может быть непосредственно подключен к дистанционно управляемому прибору для обеспечения обратной связи по положению штока для точного управления клапаном.
Традиционные датчики перемещения, например, потенциометры, требуют наличия подвижного механического сопряжения для ассоциирования движения или перемещения в датчике. Однако устройства механического сопряжения имеют точки контакта или точки износа. Таким образом, при эксплуатации в тяжелых условиях резкие колебания могут привести к поломке устройств механического сопряжения в точках износа и, таким образом, к отсоединению штока клапана от дистанционно управляемого прибора. Для повышения надежности датчика в современных конструкциях датчиков применяют бесконтактные способы определения положения.
Один тип конструкции бесконтактного датчика представляет собой магнитный датчик перемещения, который определяет смещение между двумя объектами путем присоединения элемента обратной связи (например, источника магнитного потока) к первому объекту, а чувствительного элемента (например, магнитного датчика) ко второму объекту. Элемент обратной связи создает магнитное поле, которое обнаруживают с помощью чувствительного элемента. Любое движение одного или обоих объектов, при котором происходит относительное смещение, обуславливает определение чувствительным элементом какой-либо величины магнитного поля и, таким образом, изменение выходного сигнала датчика. Этот выходной сигнал может быть непосредственно связан с относительным смещением между исполнительным механизмом и штоком клапана.
Точность функционирования магнитного датчика перемещения зависит от правильности выравнивания элемента обратной связи и чувствительного элемента. Однако из-за таких факторов, как неточная установка, чрезмерная вибрация и/или из-за других воздействий окружающей среды может возникать люфт элемента обратной связи и с течением времени он может перемещаться. Это может приводить к нарушению выравнивания относительно чувствительного элемента, что, в свою очередь, может приводить к неработоспособности датчика.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с первым иллюстративным аспектом настоящего изобретения реализуемый с помощью вычислительной машины способ управления выравниванием магнитного датчика перемещения на технологическом управляющем клапане включает определение расстояния перемещения элемента обратной связи магнитного датчика перемещения. Элемент обратной связи соединен с штоком исполнительного механизма, который является частью исполнительного механизма, который управляет технологическим управляющим клапаном. Затем способ включает определение диапазона перемещения штока исполнительного механизма. Кроме того, способ включает определение хода перемещения элемента обратной связи. Кроме того, способ включает определение текущего положения технологического управляющего клапана. Кроме того, способ предполагает выработку информации о выравнивании для магнитного датчика перемещения на основании определенного расстояния перемещения элемента обратной связи, диапазона перемещения штока исполнительного механизма, хода перемещения элемента обратной связи и текущего положения технологического управляющего клапана. Наконец, способ включает выработку графического интерфейса для отображения информации о выравнивании.
В соответствии со вторым иллюстративным аспектом настоящего изобретения некратковременный машиночитаемый носитель данных содержит машиночитаемые команды, предназначенные для исполнения одним или большим количеством процессоров системы для регулирования выравнивания магнитного датчика перемещения на технологическом управляющем клапане. Исполнение команд обуславливает определение одним или большим количеством процессоров расстояния перемещения элемента обратной связи магнитного датчика перемещения. Элемент обратной связи соединен с штоком исполнительного механизма, который является частью исполнительного механизма, который управляет технологическим управляющим клапаном. Затем исполнение команд обуславливает определение одним или большим количеством процессоров диапазона перемещения штока исполнительного механизма. Кроме того, исполнение команд обуславливает определение одним или большим количеством процессоров хода перемещения элемента обратной связи. Кроме того, исполнение команд обуславливает определение одним или большим количеством процессоров текущего положения технологического управляющего клапана. Кроме того, исполнение команд обуславливает выработку одним или большим количеством процессоров информации о выравнивании для магнитного датчика перемещения на основании определенного расстояния перемещения элемента обратной связи, диапазона перемещения штока исполнительного механизма, хода перемещения элемента обратной связи и текущего положения технологического управляющего клапана. И наконец, исполнение команд обуславливает выработку одним или большим количеством процессоров графического интерфейса для отображения информации о выравнивании.
В соответствии с третьим иллюстративным аспектом настоящего изобретения система для регулирования выравнивания датчика перемещения на технологическом управляющем клапане содержит магнитный датчик перемещения, который включает элемент обратной связи и чувствительный элемент, а также устройство, соединенное с магнитным датчиком перемещения, которое включает запоминающее устройство, содержащее команды для исполнения одним или большим количеством процессоров. Исполнение команд одним или большим количеством процессоров обуславливает определение устройством расстояния перемещения элемента обратной связи. Элемент обратной связи соединен с штоком исполнительного механизма, который является частью исполнительного механизма, который управляет технологическим управляющим клапаном. Затем исполнение команд одним или большим количеством процессоров обуславливает определение устройством диапазона перемещения штока исполнительного механизма и хода перемещения элемента обратной связи. Кроме того, исполнение команд одним или большим количеством процессоров обуславливает определение устройством текущего положения технологического управляющего клапана. Кроме того, исполнение команд одним или большим количеством процессоров обуславливает вычисление устройством ожидаемого показания датчика на основании определенного расстояния перемещения элемента обратной связи, диапазона перемещения штока исполнительного механизма, хода перемещения элемента обратной связи и текущего положения технологического управляющего клапана. Кроме того, исполнение команд одним или большим количеством процессоров обуславливает определение устройством текущего показания датчика на основании показаний, полученных от чувствительного элемента, который измеряет перемещение элемента обратной связи. Кроме того, исполнение команд одним или большим количеством процессоров обуславливает сравнение устройством ожидаемого показания датчика и текущего показания датчика для определения состояния выравнивания между элементом обратной связи и чувствительным элементом. И наконец, исполнение команд одним или большим количеством процессоров обуславливает выработку устройством графического интерфейса для отображения состояния выравнивания.
Кроме того, в соответствии с любым одним или большим количеством из вышеуказанных первого, второго или третьего иллюстративных аспектов настоящее изобретение может включать один или большее количество из следующих дополнительных предпочтительных вариантов.
В одном предпочтительном варианте выработка информации о выравнивании включает вычисление ожидаемого показания датчика на основании определенного расстояния перемещения элемента обратной связи, диапазона перемещения штока исполнительного механизма, хода перемещения элемента обратной связи и текущего положения технологического управляющего клапана. Кроме того, выработка информации о выравнивании включает определение текущего показания датчика на основании показаний, полученных от чувствительного элемента магнитного датчика перемещения, который измеряет перемещение элемента обратной связи. Кроме того, выработка информации о выравнивании включает сравнение ожидаемого показания датчика и текущего показания датчика для определения состояния выравнивания между элементом обратной связи и чувствительным элементом.
В другом предпочтительном варианте регулирование выравнивания магнитного датчика перемещения на технологическом управляющем клапане дополнительно включает определение ожидаемого диапазона перемещения датчика на основании ожидаемого показания датчика и отображение состояния выравнивания в графическом интерфейсе с учетом ожидаемого диапазона перемещения датчика и максимального допустимого диапазона датчика. Максимальный допустимый диапазон датчика связан с определенным расстоянием перемещения элемента обратной связи.
В другом предпочтительном варианте отображение состояния выравнивания в графическом интерфейсе включает отображение сплошной области внутри окна, причем сплошная область имеет высоту, которая соответствует ожидаемому диапазону перемещения датчика, а окно имеет высоту, которая является большей, чем высота сплошной области и которая соответствует максимальному допустимому диапазону датчика.
В другом предпочтительном варианте состояние выравнивания указывает на точное выравнивание, когда сплошная область расположена в центре окна.
В другом предпочтительном варианте состояние выравнивания указывает на нарушение соосности, когда сплошная область смещена по отношению к центру окна.
В другом предпочтительном варианте отображение состояния выравнивания в графическом интерфейсе дополнительно включает обеспечение инструкций в графическом интерфейсе для инструктирования пользователя на физическую регулировку элемента обратной связи для исправления нарушения соосности.
В другом предпочтительном варианте отображение состояния выравнивания в графическом интерфейсе дополнительно включает отслеживание сигналов тревоги для уведомления пользователя о нарушении соосности.
В другом предпочтительном варианте элемент обратной связи представляет собой магнитную сборку, а чувствительный элемент представляет собой магнитный датчик.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1A представлен перспективный вид приведенного в качестве примера узла магнитного датчика перемещения.
На фиг. 1В представлен перспективный вид приведенного в качестве примера узла магнитного датчика перемещения по фиг. 1A, установленного на линейный исполнительный механизм, который соединен с технологическим управляющим клапаном.
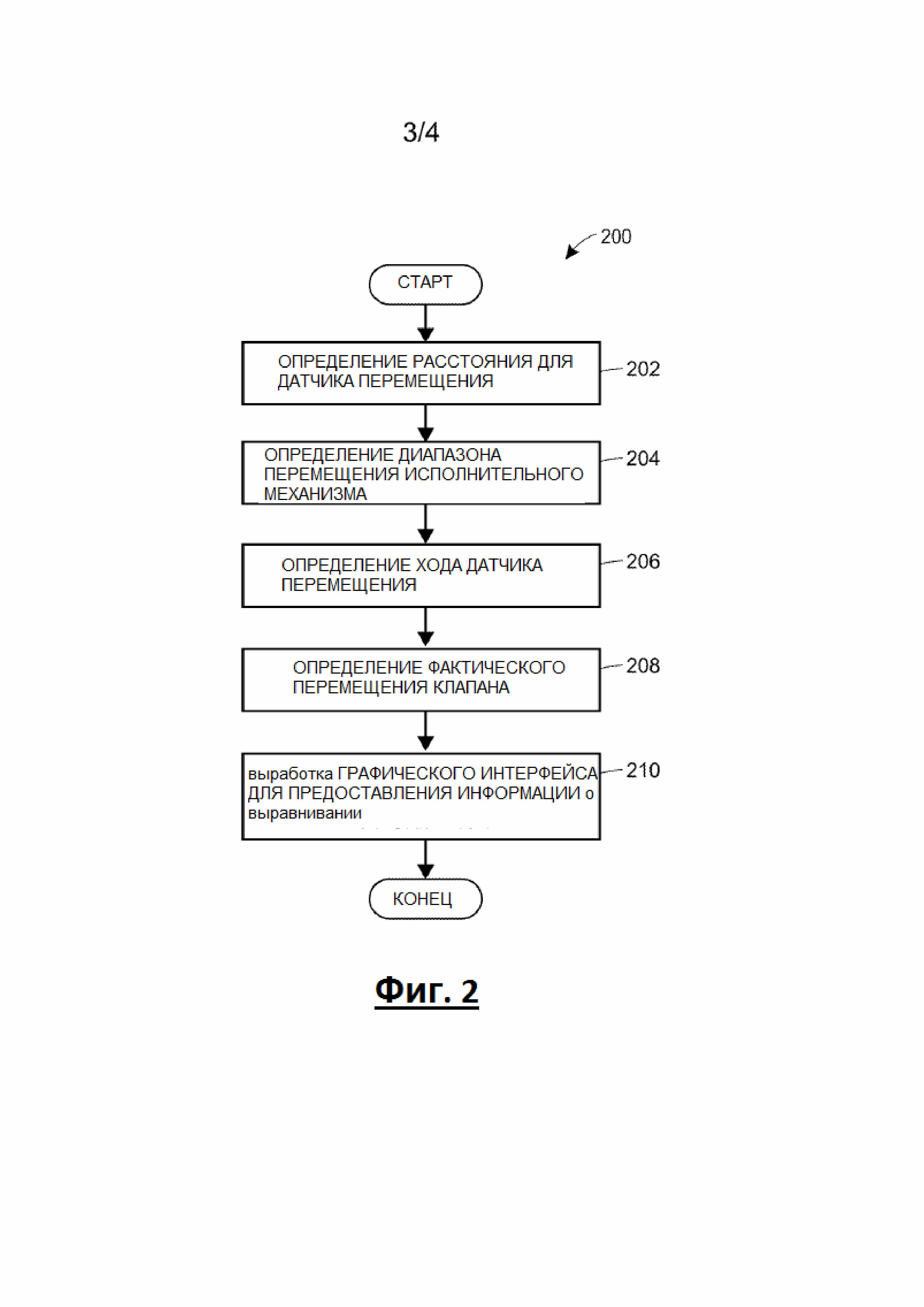
На фиг. 2 представлена блок-схема, изображающая приведенный в качестве примера способ регулирования выравнивания магнитного датчика перемещения на технологическом управляющем клапане.
На фиг. 3A и 3B показаны скриншоты, изображающие приведенные в качестве примера графические интерфейсы, применяемые для регулирования выравнивания магнитного датчика перемещения на технологическом управляющем клапане.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На фиг. 1A представлен перспективный вид приведенного в качестве примера узла 100 магнитного датчика перемещения, который содержит элемент 102 обратной связи и чувствительный элемент 104, который соединен с управляющим прибором 106.
Элемент 102 обратной связи представляет собой источник магнитного потока, например, магнит, который создает магнитное поле. В варианте осуществления по фиг. 1A элемент 102 обратной связи выполнен в виде совокупности магнитов или магнитной сборки. Элемент 102 обратной связи может быть присоединен или установлен, с помощью подходящих кронштейнов или зажимов, к валу или штоку исполнительного механизма, который функционирует с возможностью открытия и закрытия технологического управляющего клапана 122 (см. фиг. 1В).
Чувствительный элемент 104 представляет собой магнитный датчик (например, датчик Холла, магнитосопротивление, мост с эффектом супер-магниторезистивности, индукционный датчик и т. д.), который обнаруживает магнитное поле, создаваемое элементом 102 обратной связи. Как показано на фиг. 1A, чувствительный элемент 104 расположен внутри управляющего прибора 106. В частности, чувствительный элемент 104 расположен в канале 108, по которому могут перемещать элемент 102 обратной связи для его отслеживания чувствительным элементом 104. Таким образом, чувствительный элемент 104 в канале 108 обнаруживает движение элемента 102 обратной связи беспроводным и/или бесконтактным способом.
Управляющий прибор 106 содержит процессор 110, запоминающее устройство 112, интерфейс 114 оператора и коммуникационный интерфейс 116. Запоминающее устройство 112 хранит команды, которые могут быть исполнены процессором 110 для осуществления управления технологическим управляющим клапаном. Интерфейс 114 оператора позволяет пользователю или оператору взаимодействовать с прибором 106, а коммуникационный интерфейс 116 обеспечивает связь между прибором 106 и другими устройствами или периферийным оборудованием. В одном из вариантов осуществления управляющим прибором 106 можно управлять дистанционно посредством коммуникационного интерфейса 116.
На фиг. 1В представлен перспективный вид приведенного в качестве примера узла 100 магнитного датчика перемещения по фиг. 1A, установленного на линейный исполнительный механизм 120, который соединен с технологическим управляющим клапаном 122. В варианте осуществления по фиг. 1B приведенный в качестве примера узел 100 магнитного датчика перемещения прикреплен непосредственно к исполнительному механизму 120 с помощью болтов 124. Альтернативно, приведенный в качестве примера узел 100 магнитного датчика перемещения может быть непосредственно установлен на исполнительный механизм 120 с помощью любого подходящего кронштейна, зажима и/или других средств. На фиг. 1B узел 100 магнитного датчика перемещения ориентирован относительно исполнительного механизма 120 таким образом, что канал 108 параллелен штоку 126 исполнительного механизма. Шток 126 исполнительного механизма функционально связан известным способом с регулирующим элементом. Кроме того, приведенный в качестве примера узел 100 магнитного датчика перемещения расположен таким образом, что канал 108 может принимать элемент 102 обратной связи (например, магнитная сборка). Соответственно, на фиг. 1B также показан узел 130 кронштейна, применяемый для присоединения элемента 102 с обратной связью к штоку 126 исполнительного механизма и удержания элемента 102 с обратной связью внутри канала 108 приведенного в качестве примера узла 100 магнитного датчика перемещения.
Таким образом, когда шток 126 исполнительного механизма перемещают для открытия и/или закрытия технологического управляющего клапана 122, элемент 102 обратной связи перемещается внутри канала 108 для обеспечения возможности отслеживания этого перемещения чувствительным элементом 104 приведенного в качестве примера узла 100 магнитного датчика перемещения. Затем управляющий прибор 106 приведенного в качестве примера узла 100 магнитного датчика перемещения может принимать информацию о положении или перемещении технологического управляющего клапана 122 посредством чувствительного элемента 104. С помощью отслеживаемой информации о положении или перемещении управляющий прибор 106 может осуществлять регулирование технологического управляющего клапана 122 на основании алгоритмов управления, исполняемых процессором 110 и/или на основе управляющих сигналов, принятых от технологической управляющей вычислительной машины или любого другого внешнего устройства.
Хотя на фиг. 1B показан приведенный в качестве примера узел 100 магнитного датчика перемещения, применяемый для автоматизации линейного клапана, приведенный в качестве примера узел 100 магнитного датчика перемещения, как правило, может быть применен для автоматизации других типов технологических управляющих клапанов (например, поворотного клапана, клапана с поворотом штока на четверть оборота и т. д.), применяемых в технологической управляющей установке или системе.
Для получения точной информации о положении или перемещении технологического управляющего клапана 122 элемент 102 обратной связи и чувствительный элемент 104 необходимо соответствующим образом выровнять таким образом, чтобы элемент 102 обратной связи находился в пределах допустимого диапазона обнаружения чувствительного элемента 104 во всем диапазоне перемещения. Как правило, выравнивание осуществляют на стадии установки с помощью шаблона выравнивания для правильного позиционирования элемента 102 обратной связи относительно чувствительного элемента 104.
Однако, если установка выполнена неправильно, выравнивание элемента 102 обратной связи относительно чувствительного элемента 104 может быть нарушено. Кроме того, из-за сильной вибрации, которая может возникать при работе клапана, и/или из-за других воздействий окружающей среды с течением времени может возникать люфт элемента 102 обратной связи и смещение из выровненного положения. Хотя это смещение не всегда может быть визуально различимым, оно может быть достаточным для перемещения элемента 102 обратной связи за пределы допустимого диапазона обнаружения чувствительного элемента 104.
Когда технологический управляющий клапан 122 находится в рабочем состоянии, также трудно обнаружить любое смещение элемента 102 обратной связи, поскольку оператору необходимо визуально отслеживать выравнивание элемента 102 обратной связи в пределах канала 108. Однако это не всегда возможно, поскольку трубы, провода и другое оборудование часто закрывают обзор оператору.
Вместе с тем, оператор может попытаться устранить проблемы выравнивания, выполнив процедуру автоматической калибровки. Хотя это может привести к временному решению проблемы, процедура автоматической калибровки лишь маскирует проблемы, если элемент 102 обратной связи слишком сильно смещен физически. Если проблемы выравнивания сохраняются, то в одной из точек автоматическая калибровка не будет успешной и оператор должен будет прибегнуть к более детальному поиску и устранению неисправностей.
Чтобы оператору было легче обнаруживать и контролировать проблемы выравнивания, для оператора может быть выведен графический интерфейс, отображающий выравнивание между элементом 102 обратной связи и чувствительным элементом 104. С помощью этого графического интерфейса оператор может легко оценить или определить, является ли выравнивание надлежащим, плохим или промежуточным. При этом оператор будет проинформирован о текущем состоянии выравнивания и ему не нужно будет визуально наблюдать за выравниванием или полагаться на визуально наблюдаемые признаки. Это особенно целесообразно в условиях низкой освещенности и/или в труднодоступных местах. Кроме того, графический интерфейс может предоставлять оператору информацию о том, требуются ли физические корректировки или какие виды физических корректировок необходимы для устранения обнаруженных проблем выравнивания. Эта информация полезна не только для обеспечения оптимальной производительности, но и для получения своевременного предупреждения о приближающемся отказе в случае, когда элемент обратной связи становится прослабленным, изношенным или поврежденным.
На фиг. 2 представлена блок-схема приведенного в качестве примера способа 200 регулирования выравнивания магнитного датчика перемещения на технологическом управляющем клапане. Способ 200 может включать один или большее количество блоков, процедур или функций в виде выполняемых вычислительной машиной команд, которые хранят на материальном машиночитаемом носителе информации (например, 112 на фиг. 1) и исполняют с помощью процессора (например, 110 на фиг. 1). Магнитный датчик перемещения может включать элемент обратной связи (например, 102 на фиг. 1) и чувствительный элемент (например, 104 на фиг. 1). Таким образом, способ 200 могут выполнять для обеспечения надлежащего выравнивания элемента обратной связи с чувствительным элементом.
Способ 200 начинается со сбора различной информации, связанной с магнитным датчиком перемещения. Сначала способ 200 определяет расстояние для датчика перемещения (блок 202). В частности, способ 200 определяет расстояние перемещения элемента обратной связи в магнитном датчике перемещения. Расстояние перемещения элемента обратной связи соответствует максимальному допустимому диапазону датчика. Эта информация может быть, например, введена вручную пользователем. В одном из вариантов осуществления элемент обратной связи выполнен в виде магнитной сборки. Существуют различные типы магнитных сборок, которые классифицируют в соответствии с расстоянием их перемещения (например, ¾ дюйма, 1 дюйм, 2 дюйма, 4 дюйма, 8¼ дюйма и т. д). Для магнитной сборки любого типа чувствительный элемент, например датчик Холла, будет номинально производить считывание между минимальным и максимальным значениями грубой оценки перемещения независимо от фактического расстояния перемещения. Например, во многих ситуациях показания будут находиться в пределах значений от 0 до 12,288 грубой оценки перемещения.
Затем способ 200 определяет диапазон перемещения исполнительного механизма (блок 204). В частности, способ 200 определяет диапазон перемещения штока исполнительного механизма, с которым соединен или на который установлен элемент обратной связи. Шток исполнительного механизма является частью исполнительного механизма, который может быть соединен с технологическим управляющим клапаном. Соответственно, при перемещении штока исполнительного механизма может быть открыт или закрыт технологический управляющий клапан, таким образом осуществляют регулирование течения, проходящего через клапан. Номинальное значение для диапазона перемещения штока исполнительного механизма, как правило, указано на паспортной табличке исполнительного механизма. Эта информация может быть, например, введена вручную пользователем.
В общем, для точного измерения перемещения расстояние перемещения магнитной сборки должно быть соотнесено с диапазоном перемещения штока исполнительного механизма. Если выбрано слишком малое расстояние перемещения магнитной сборки, то даже при идеальном выравнивании магнитная сборка может выходить за пределы допустимого диапазона датчика. С другой стороны, если выбрано слишком большое расстояние перемещения магнитной сборки, это может привести к снижению разрешения. Как правило, расстояние перемещения магнитной сборки следует выбирать таким, чтобы расстояние перемещения не превышало удвоенный диапазон перемещения штока исполнительного механизма. Например, если шток исполнительного механизма имеет диапазон перемещения в 1 дюйм, то следует применять магнитную сборку с расстоянием перемещения не более, чем 2 дюйма.
Затем способ 200 определяет ход для датчика перемещения (блок 206). В частности, способ 200 определяет ход перемещения элемента обратной связи. Например, если магнитный датчик перемещения выполнен с возможностью прямолинейного движения, то ход перемещения элемента обратной связи может представлять собой движение из конца в конец или сверху вниз. Если магнитный датчик перемещения выполнен с возможностью поворотного движения, то ход перемещения элемента обратной связи может представлять собой движение по часовой стрелке или против часовой стрелки. Как правило, возрастание показаний хода перемещения должно быть связано с увеличением управляющего сигнала, подаваемого на исполнительный механизм. В некоторых ситуациях показания хода перемещения необходимо инвертировать в зависимости от того, в каком направлении перемещается элемент обратной связи с учетом увеличения управляющего сигнала на исполнительном механизме. Информация, касающаяся хода перемещения элемента обратной связи, может быть введена вручную пользователем. В одном из вариантов осуществления способ 200 может определять ход перемещения элемента обратной связи при выполнении процедуры автоматической калибровки.
Кроме того, способ 200 определяет фактическое перемещение технологического управляющего клапана (блок 208). Как правило, это визуальная оценка текущего физического положения клапана (например, нормально открытый, нормально закрытый, полуоткрытый и т. д.). Фактическое перемещение технологического управляющего клапана, как правило, определяют в процентах. Например, нормально закрытый клапан соответствует 0% перемещению. Эта информация может быть, например, введена вручную пользователем.
После сбора различной информации в блоках 202-208 способ 200 переходит к выработке графического интерфейса, который содержит информацию о выравнивании (блок 210). В частности, способ 200 определяет ожидаемое показание датчика на основании расстояния перемещения элемента обратной связи, диапазона перемещения штока исполнительного механизма, хода перемещения элемента обратной связи и фактического перемещения технологического управляющего клапана. В одном из вариантов осуществления способ 200 вычисляет ожидаемое показание датчика в виде грубой оценки перемещения (например, в пределах от 0 до 12,288).
Кроме того, способ 200 определяет текущее показание датчика, измеренное чувствительным элементом в магнитном датчике перемещения. Это текущее показание датчика отражает текущее физическое положение технологического управляющего клапана, определяемое путем измерения перемещения элемента обратной связи. В одном из вариантов осуществления текущее показание датчика представлено в виде грубой оценки перемещения (например, в пределах от 0 до 12,288), полученной от чувствительного элемента. Путем сравнения текущего показания датчика и ожидаемого показания датчика способ 200 может оценивать состояние выравнивания между элементом обратной связи и чувствительным элементом. Например, если фактическое перемещение технологического управляющего клапана определено как 0% (например, нормально закрытый), а текущее показание датчика и ожидаемое показание датчика имеют одинаковое значение, то элемент обратной связи можно считать правильно выровненным относительно чувствительного элемента. С другой стороны, если текущее показание датчика и ожидаемое показание датчика имеют разные значения, то элемент обратной связи может быть несоосным.
Кроме того, на основании ожидаемого показания датчика способ 200 может определять ожидаемый диапазон перемещения датчика. Способ 200 может визуально отображать состояние выравнивания в графическом интерфейсе, изображая ожидаемый диапазон перемещения датчика с учетом максимального допустимого диапазона датчика.
В одном из вариантов осуществления способ 200 включает отображение сплошной области, которая может перемещаться (например, вверх и вниз) в окне графического интерфейса. Эта сплошная область имеет высоту, которая соответствует ожидаемому диапазону перемещения датчика. Высота окна является большей, чем высота сплошной области и соответствует максимальному допустимому диапазону датчика. Точное выравнивание соответствует положению, когда сплошная область находится в центре окна. Соответственно, наблюдая за положением сплошной области в окне пользователь или оператор может быстро определить, является ли выравнивание приемлемым или неприемлемым. Если возникли проблемы выравнивания или другие ситуации, требующие внимания, способ 200 может включать информирование оператора о том, что необходимо предпринять для исправления или корректирования выравнивания. Например, способ 200 может включать выдачу оператору рекомендаций, касающихся некоторых незначительных или существенных физических регулировок для изменения положения элемента обратной связи.
Выполнение этапов в блоках 202-210 могут многократно повторять, чтобы оператор мог непрерывно контролировать и регулировать выравнивания магнитного датчика перемещения на технологическом управляющем клапане. В некоторых вариантах осуществления в случае применения заданных параметров конфигурации способ 200 может автоматически заполнять или определять различную информацию, необходимую в блоках 202, 204 и 206.
В некоторых вариантах осуществления в блоке 208 может быть применен дополнительный датчик положения или датчик перемещения. Дополнительный датчик положения или датчик перемещения может выдавать независимые показания обратной связи для определения фактического перемещения технологического управляющего клапана в блоке 208. Таким образом, это позволило бы избежать необходимости для оператора визуально оценивать текущее физическое положение клапана. Таким образом, способ 200 может быть применен для выполнения функций диагностики в режиме реального времени, при которой способ 200 автоматически обнаруживает и контролирует любые возникающие проблемы выравнивания. Благодаря диагностике в режиме реального времени способ 200 также может выдавать сигналы тревоги для уведомления операторов или других пользователей об обнаружении потенциальных проблем выравнивания, чтобы эти проблемы могли быть решены прежде, чем они приведут к неработоспособности магнитного датчика перемещения или технологического управляющего клапана.
Применение способа 200 является предпочтительным при выполнении этапа начальной установки технологического управляющего клапана. Это связано с тем, что информация, касающаяся фактического перемещения клапана (блок 208), может быть получена с определенной степенью достоверности (например, 0% или 100%). Кроме того, во время выполнения процедуры автоматической калибровки, когда технологический управляющий клапан достигает крайних точек перемещения, способ 200 может быть выполнен для определения того, необходимо ли корректирование.
Очевидно, способ 200 также может быть применен для обнаружения проблем с выравниванием во время эксплуатации технологического управляющего клапана. Например, когда дроссельный клапан находится в устойчивом положении, оператор может ввести оценку фактического перемещения дроссельного клапана (например, 70% перемещения). Затем способ 200 может вычислить информацию о выравнивании, и при необходимости выдать рекомендации по регулировке. Очевидно, что любая рекомендация является в сущности лишь оценкой фактического перемещения дроссельного клапана. Кроме того, любые физические регулировки необходимо выполнять позднее, когда клапан не будут эксплуатировать.
В другой ситуации способ 200 также может быть применен для обнаружения проблем с выравниванием во время эксплуатации двухпозиционного клапана. В данном случае способ 200 может включать дополнительные блоки, в которых осуществляют конфигурирование и выработку сигнала предупреждения о перемещении. Например, предупреждение о перемещении может быть установлено на -2% и 102% от фактического перемещения клапана. Таким образом, если клапан нормально закрыт (например, 0% перемещения), нижний предел предупреждения о перемещении (-2%) не будет достигнут и предупреждение о перемещении не будет выдано. Однако при возникновении проблемы выравнивания (например, при смещении элемента обратной связи) воспринимаемые показания перемещения также будут смещены до несколько меньшего значения, чем 0% перемещения. Таким образом, будет выдано предупреждение о перемещении и оператор может быть уведомлен о необходимости проверки и исправления обнаруженной проблемы выравнивания.
На фиг. 3A и 3B показаны скриншоты приведенных в качестве примера графических интерфейсов 302 и 304, соответственно, которые могут быть применены для регулировки выравнивания магнитного датчика перемещения на технологическом управляющем клапане. Графические интерфейсы 302 и 304 могут представлять собой выполняемые вычислительной машиной команды, которые хранят на материальном машиночитаемом носителе информации (например, 112 на фиг. 1) и исполняют с помощью процессора (например, 110 на фиг. 1). Выполняемые графические интерфейсы 302 и 304 могут быть отображены на экране или в интерфейсе устройства (например, 114 на фиг. 1) для взаимодействия с пользователем или оператором.
В одном из вариантов осуществления графические интерфейсы 302 и 304 могут быть выработаны при реализации или выполнении способа 200 по фиг. 2. Каждый из графических интерфейсов 302 и 304 может включать поля 306-312, применяемые для сбора различной информации, связанной с магнитным датчиком перемещения. В частности, поле 306 могут применять для сбора информации о расстоянии перемещения элемента обратной связи в магнитном датчике перемещения. Поле 308 могут применять для сбора информации о ходе перемещения элемента обратной связи в магнитном датчике перемещения. В вариантах осуществления по фиг. 3A и 3B магнитный датчик перемещения выполнен с возможностью прямолинейного движения, а элемент обратной связи выполнен в виде магнитной сборки. Соответственно, ход перемещения магнитной сборки определен из конца в конец (например, в направлении вверх или вниз).
Поле 310 могут применять для сбора информации о диапазоне перемещения штока исполнительного механизма, с которым соединена магнитная сборка. Шток исполнительного механизма является частью исполнительного механизма, применяемого для управления технологическим управляющим клапаном. Поле 312 могут применять для сбора информации о фактическом перемещении технологического управляющего клапана. Информация, собираемая в полях 306, 308 и 310, может быть введена вручную оператором или автоматически заполнена путем вызова заданных параметров конфигурации. В поле 312 оператор может вручную ввести визуально определенное текущее физическое положение технологического управляющего клапана.
После определения или получения информации в полях 306-312 графические интерфейсы 302 и 304 могут выводить состояние выравнивания, отображая ожидаемое показание датчика в поле 314 и текущее показание датчика в поле 316. Ожидаемое показание датчика определяют на основании информации, содержащейся в полях 306-312, а текущее показание датчика определяют на основании показаний, полученных от чувствительного элемента (например, датчика Холла), который измеряет перемещение магнитной сборки. Значения в полях 314 и 316 могут быть выражены, например, в виде грубой оценки перемещения (например, от 0 до 12 288).
Кроме того, графические интерфейсы 302 и 304 могут визуально изображать состояние выравнивания, отображая ожидаемый диапазон перемещения датчика, как показано в окне 308. В вариантах осуществления по фиг. 3A и 3B ожидаемый диапазон перемещения датчика изображен в виде подвижной сплошной области 320, расположенной внутри окна 318. Высота окна 318 отражает максимальный допустимый диапазон датчика. Таким образом, любые свободные места выше и ниже сплошной области 320 будут отражать оставшийся допустимый диапазон датчика. Таким образом, состояние выравнивания может быть визуализировано с помощью перемещения сплошной области 320 вверх или вниз внутри окна 318.
Если сплошная область 320 находится в центре окна 318, достигнуто точное выравнивание. Другими словами, элемент обратной связи или магнитная сборка точно выровнен по отношению к чувствительному элементу. Если сплошная область 320 смещена от центра в окне 318, магнитная сборка может быть смещена вверх или вниз. Это означает, что, хотя магнитная сборка все еще находится в пределах допустимого диапазона датчика, для лучшего выравнивания магнитная сборка должна быть установлена выше или ниже. Если сплошная область 320 находится на любом из концов окна 318, магнитная сборка может почти выходить за пределы нижнего или верхнего пределов датчика. Соответственно, для поддержания правильной работы датчика магнитную сборку необходимо установить выше или ниже.
На фиг. 3A представлена ситуация, при которой магнитная сборка точно выровнена, поскольку сплошная область 320 расположена по центру в окне 318. Таким образом, в окне 322 состояния графический интерфейс 302 отображает состояние выравнивания как «Хорошее» («Good»), а в окне сообщения 324 выводят соответствующее сообщение о том, что регулировка не требуется.
На фиг. 3B представлена ситуация, при которой магнитная сборка смещена вниз, поскольку сплошная область 320 смещена по отношению к центру окна 318. Таким образом, в окне 326 состояния графический интерфейс 304 отображает состояние выравнивания «Внимание!» («Сaution»), а в окне сообщения 328 выводят соответствующее сообщение о том, что требуется физическая регулировка.
Нижеследующие дополнительные замечания применимы и к сказанному выше. В данном описании множественные экземпляры могут реализовывать функции, процедуры или операционные структуры, описанные для одного экземпляра. Хотя отдельные функции и инструкции одного или большего количества способов проиллюстрированы и описаны как отдельные операции, одну или большее количество отдельных операций можно выполнять одновременно и эти операции не обязательно следует выполнять именно в представленном порядке. Конструкции и функциональные средства, представленные в виде отдельных компонентов в иллюстративных конфигурациях, могут быть реализованы в виде комбинированной конструкции или компонента. Аналогично, конструкции и функциональные средства, представленные в виде одного компонента, могут быть реализованы в виде отдельных компонентов. Эти и другие изменения, модификации, дополнения и усовершенствования входят в объем представленного в данном документе объекта изобретения.
Кроме того, некоторые варианты осуществления описаны в данном документе как включающие логическую схему или некоторое количество функций, компонентов, модулей, блоков или механизмов. Функции могут представлять собой либо программные модули (например, некратковременный код, хранимый на материальном машиночитаемом носителе данных), либо аппаратные модули. Аппаратный модуль представляет собой материальный блок, который способен выполнять определенные операции и может быть определенным способом сконфигурирован или размещен. В иллюстративных вариантах осуществления одна или большее количество вычислительных систем (например, индивидуальная, клиентская или серверная вычислительная система) или один или большее количество аппаратных модулей вычислительной системы (например, процессор или группа процессоров) могут быть сконфигурированы с помощью программного обеспечения (например, прикладной программы или части прикладной программы) в виде аппаратного модуля, который функционирует для выполнения определенных операций, описанных в настоящем документе.
В различных вариантах осуществления аппаратный модуль может быть реализован в виде механического или электронного устройства. Например, аппаратный модуль может содержать специализированную электронную или логическую схему, сконфигурированную на постоянной основе (например, в виде специализированного процессора, такого как программируемая полем матрица логических элементов (FPGA) или специализированная интегральная схема (ASIC)) для выполнения определенных функций. Кроме того, аппаратный модуль может содержать программируемую логическую или электронную схему (например, встроенную в процессор общего назначения или в другой программируемый процессор), временно сконфигурированную с помощью программного обеспечения для выполнения определенных операций. Следует иметь в виду, что решение о реализации аппаратного модуля в виде механического устройства, в специализированной электронной схеме и схеме, сконфигурированной на постоянной основе, или во временно сконфигурированной схеме (например, сконфигурированной с помощью программного обеспечения) может быть обусловлено факторами стоимости и временных затрат.
Соответственно, термин «аппаратное обеспечение» следует понимать как охватывающий материальную единицу, то есть единицу, сконструированную физически, сконфигурированную на постоянной основе (например, аппаратно-реализованную) или временно сконфигурированную (например, запрограммированную) с возможностью функционирования определенным образом или с возможностью выполнения определенных операций, описанных в данном документе. Если рассматривать варианты осуществления, в которых аппаратные модули сконфигурированы временно (например, запрограммированы), каждый из аппаратных модулей не обязательно должен быть сконфигурирован или инстанцирован в каждый момент времени. Например, если аппаратные модули содержат процессор общего назначения, сконфигурированный с помощью программного обеспечения, этот процессор общего назначения может быть сконфигурирован в виде соответствующих различных аппаратных модулей в разные периоды времени. Программное обеспечение может соответственно сконфигурировать процессор, например, для создания конкретного аппаратного модуля в определенный момент времени и создания другого аппаратного модуля в другой момент времени.
Аппаратные и программные модули могут предоставлять информацию другим аппаратным модулям и/или программным модулям и принимать от них информацию. Соответственно, описанные аппаратные модули можно рассматривать как подключенные с возможностью передачи данных. Если некоторое количество таких аппаратных или программных модулей существует одновременно, передача данных может быть осуществлена путем передачи сигнала (например, по соответствующим схемам и шинам), который связывает аппаратные или программные модули. В вариантах осуществления, в которых некоторое количество аппаратных или программных модулей сконфигурировано или инстанцировано в разные моменты времени, передача данных между такими аппаратными или программными модулями может быть осуществлена, например, путем сохранения информации в структурах запоминающего устройства, к которым имеет доступ некоторое количество аппаратных или программных модулей, и извлечения информации из структур запоминающего устройства, к которым имеет доступ некоторое количество аппаратных или программных модулей. Например, один аппаратный или программный модуль может выполнять операцию и сохранять выходные данные этой операции в запоминающем устройстве, к которому он подключен с возможностью передачи данных. Затем другой аппаратный или программный модуль может, спустя некоторое время, осуществлять доступ к запоминающему устройству для извлечения и обработки сохраненных выходных данных. Кроме того, аппаратные и программные модули могут инициировать осуществление связи с входными или выходными устройствами и могут производить действия в отношении какого-либо ресурса (например, собирать информацию).
Различные операции, связанные с приведенными в качестве примера функциями и способами, описанными в данном документе, могут быть выполнены по меньшей мере частично одним или большим количеством процессоров, которые сконфигурированы временно (например, с помощью программного обеспечения) или сконфигурированы на постоянной основе для выполнения соответствующих операций. Независимо от того, сконфигурированы ли такие процессоры временно или на постоянной основе, они могут представлять собой реализуемые с помощью процессора модули, которые функционируют с возможностью выполнения одной или большего количества операций или функций. Модули, упоминаемые в данном документе, в некоторых иллюстративных вариантах осуществления могут включать модули, реализуемые с помощью процессора.
Аналогично, способы или функции, описанные в данном документе, могут быть по меньшей мере частично реализованы с помощью процессора. Например, по меньшей мере некоторые из функций способа могут быть выполнены одним или большим количеством процессоров или аппаратных модулей, реализуемых с помощью процессоров. Выполнение некоторых из функций может быть распределено между одним или большим количеством процессоров, которые находятся не только в одной машине, но и установленных на некотором количестве машин. В некоторых иллюстративных вариантах осуществления процессор или процессоры могут быть расположены в одном месте (например, в домашней среде, офисной среде или в виде подсистемы серверов), а в других вариантах осуществления процессоры могут быть распределены по нескольким местам.
Кроме того, один или большее количество процессоров могут функционировать с возможностью поддержки выполнения соответствующих операций в среде «облачных вычислений» или в режиме «программное обеспечение как услуга» (SaaS). Например, по меньшей мере некоторые из функций могут выполнять с помощью группы вычислительных машин (в качестве примеров машин, содержащих процессоры), причем эти операции доступны по сети (например, по сети Интернет) и через один или большее количество соответствующих интерфейсов (например, прикладных программных интерфейсов (API)).
Выполнение некоторых из операций может быть распределено между одним или большим количеством процессоров, которые находятся не только в одной машине, но и установленных на некотором количестве машин. В некоторых иллюстративных вариантах осуществления один или большее количество процессоров или модулей, реализуемых с помощью процессоров, могут быть расположены в одном географическом местоположении (например, в домашней среде, офисной среде или в подсистеме серверов). В других иллюстративных вариантах осуществления один или большее количество процессоров или модулей, реализуемых с помощью процессоров, могут быть распределены по нескольким географическим местоположениям.
Если специально не установлено иное, обсуждение в настоящем документе с упоминанием таких терминов, как «обработка», «вычисление», «расчет», «определение», «представление», «отображение» и т. п., может относиться к действиям или способам машины (например, вычислительной машины), которая обрабатывает или преобразует данные, представленные в виде физических (например, электронных, магнитных или оптических) величин в пределах одного или большего количества запоминающих устройств (например, энергозависимого запоминающего устройства, энергонезависимого запоминающего устройства или их комбинации), регистров или других компонентов машины, которые принимают, сохраняют, передают или отображают информацию.
После прочтения настоящего описания для специалистов в данной области техники станут очевидными и другие альтернативные конструктивные и функциональные решения, касающиеся способа и системы для установки выравнивания магнитного датчика перемещения на технологическом управляющем клапане, которые могут быть применены в дополнение к описанным или вместо них. Таким образом, хотя были проиллюстрированы и описаны конкретные варианты осуществления и режимы применения, следует понимать, что описанные варианты осуществления не ограничиваются точной конструкцией и компонентами, раскрытыми в данном документе. Различные модификации, изменения и вариации, которые будут очевидны для специалистов в данной области техники, могут быть предложены в отношении расположения, функционирования и подробных данных, касающихся способа и устройства, раскрытых в данном документе, без отступления от сущности и объема изобретения, определяемого прилагаемой формулой изобретения.
Реферат
Настоящее изобретение в целом относится к калибровке датчика и, в частности, к способам и системам для регулирования выравнивания датчика перемещения, применяемого в технологических управляющих клапанах. Для упрощения процесса регулирования выравнивания датчика перемещения на технологических управляющих клапанах способ и система вырабатывают графический интерфейс для отображения пользователю или оператору информации о выравнивании. Графический интерфейс визуализирует состояние выравнивания между элементом обратной связи и чувствительным элементом, который включает магнитный датчик перемещения на технологическом управляющем клапане. С помощью графического интерфейса пользователь или оператор может легко определять, является ли выравнивание между элементом обратной связи и чувствительным элементом надлежащим или корректным. Кроме того, графический интерфейс предоставляет информацию о том, необходимы ли физические регулировки для исправления обнаруженных проблем выравнивания, что позволяет избежать приближающихся отказов, благодаря чему могут быть достигнуты оптимальные характеристики. Таким образом, способ и система повышают надежность и точность обратной связи по перемещению клапана. 3 н. и 17 з.п. ф-лы, 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство и система для контроля вентильной арматуры
Комментарии