Способ работы системы позиционирования - RU2618994C2
Код документа: RU2618994C2
Чертежи




Описание
Изобретение относится к способу работы системы позиционирования, которая целесообразно имеет несколько позиционеров, которые предпочтительно имеют каждый по меньшей мере один манипулятор для манипулирования конструктивным элементом. Предпочтительной областью применения является монтаж конструкции самолетов, в котором сегменты оболочки монтируются в секции фюзеляжа, которые затем при необходимости позиционируются относительно друг друга и соединяются в фюзеляж, а затем на фюзеляже монтируются, например, еще несущие поверхности, хвостовое оперение и шасси.
При обычном монтаже структуры самолетов, в котором конструктивные элементы в виде сегментов оболочки монтируют в секции фюзеляжа, известно, что позиционирование осуществляется с помощью жестких, тяжелых устройств. При этом конструктивный элемент может быть расположен в раме, задающей форму. Конструктивный элемент можно вместе с рамой позиционировать с помощью устройств относительно опорной системы на кольцеобразном шаблоне. Затем можно периодически измерять положение устройства. При данном монтаже устройства и, в частности, рама целесообразно выполняются с высокой жесткостью. Однако недостаток при этом заключается в том, что за счет конструктивного выполнения в виде задающей форму рамы ограничивается гибкость применения для различных вариантов конструктивных элементов.
Кроме того, известно использование координированных блоков позиционирования для монтажа оболочки. При этом элементы оболочки можно размещать в заданных точках размещения над так называемыми деталями горячего крепления и с помощью монтажных устройств позиционировать относительно друг друга в точках опоры. В зависимости от размеров подлежащего монтажу самолета, на сегменте оболочки может быть установлено, например, от четырех до восьми деталей горячего крепления. При таком монтаже измерение позиции сегментов оболочки может быть составляющей частью каждого процесса монтажа. Однако недостаток данного выполнения заключается в том, что требуются очень большие затраты на технику управления.
Поэтому в основу изобретения положена задача создания улучшенного и/или альтернативного способа работы системы позиционирования.
Эта задача может быть решена, согласно изобретению, с помощью способа работы в соответствии с независимым пунктом 1 формулы изобретения.
Согласно изобретению, создан способ работы системы позиционирования, которая целесообразно содержит несколько позиционеров, из которых каждый имеет по меньшей мере один, предпочтительно несколько манипуляторов. Система позиционирования пригодна, в частности, для монтажа конструкции самолета, однако может также использоваться, например, при монтаже транспортных средств (например, частей кузова, стекол и так далее).
Благодаря настоящему изобретению достигается технический результат, состоящий в увеличении точности и упрощении позиционирования конструктивных элементов, а также удержания их в требуемой форме.
В рамках изобретения конструктивный элемент захватывается с помощью манипуляторов и предпочтительно синхронно манипулируется во время целесообразно совместного захвата манипуляторами.
Под «синхронным манипулированием» понимается, в частности, синхронизация движения манипуляторов.
Возможно, что манипуляторы синхронно манипулируют конструктивным элементом, например, из исходного положения (исходной позиции и/или исходной ориентации) в целевое положение (целевую позицию и/или целевую ориентацию).
Возможно, что конструктивный элемент, например, в исходном положении или в целом без соответствующих мер противодействия имеет вызванную собственным весом деформацию. Таким образом, конструктивный элемент может быть, в частности, деформируемым конструктивным элементом.
Конструктивный элемент захватывается предпочтительно в исходном положении манипуляторами, и с помощью манипуляторов ему придается желаемая форма, и/или он удерживается в желаемой форме.
Желаемая форма предпочтительно соответствует форме, в которой деформация, вызванная собственным весом конструктивного элемента, и/или внутренние напряжения конструктивного элемента компенсируются.
В рамках изобретения деформация, вызванная собственным весом конструктивного элемента, и/или внутренние напряжения конструктивного элемента могут быть по существу полностью компенсированы, однако не обязательно. Изобретением предусмотрена также лишь частичная компенсация.
В рамках изобретения придание формы или удерживание в форме можно осуществлять с помощью целенаправленного манипулирования всеми манипуляторами и/или с помощью целенаправленного манипулирования лишь некоторыми манипуляторами. То есть не обязательно требуются все манипуляторы для придания конструктивному элементу желаемой формы и/или для удерживания в желаемой форме.
Возможно, что манипуляторы по меньшей мере на некоторых участках транспортируют конструктивный элемент в желаемой форме в целевое положение. При этом в зависимости от исходного положения и целевого положения и геометрии конструктивного элемента возможно, что между исходным положением и целевым положением манипуляторы по меньшей мере на некоторых участках непрерывно манипулируют конструктивным элементом так, что он удерживается в желаемой форме. Другими словами, возможно также, что манипуляторы не только манипулируют конструктивным элементом с целью его транспортировки, но также одновременно удерживают его в желаемой форме.
Конструктивный элемент на своем пути от исходного положения к целевому положению предпочтительно постоянно удерживается манипуляторами в желаемой форме. Однако в рамках изобретения возможно также, что конструктивному элементу придают желаемую форму лишь в целевом положении.
Манипуляторы могут придавать конструктивному элементу, например, за счет синхронного или не синхронного манипулирования (например, координированного манипулирования) желаемую форму и/или удерживать его в желаемой форме.
Как указывалось выше, конструктивный элемент может иметь в исходном положении деформацию, вызванную его собственным весом.
В одном предпочтительном варианте выполнения изобретения конструктивный элемент приводится в исходное положение с помощью удерживающего и/или транспортировочного устройства (например, крановой конструкции), в которой он захватывается манипуляторами (например, в уже желаемой форме) и/или ему придают желаемую форму. Возможно, что манипуляторы захватывают конструктивный элемент уже в желаемой форме. В этом случае удерживающее и/или транспортировочное устройство удерживает конструктивный элемент уже в желаемой форме. Однако возможно также, что манипуляторы захватывают деформированный за счет собственного веса конструктивный элемент и придают ему желаемую форму. В этом случае удерживающее и/или транспортировочное устройство целесообразно не удерживает конструктивный элемент в желаемой форме.
Предпочтительно, в исходном положении осуществляют передачу конструктивного элемента из удерживающего и/или транспортировочного устройства на манипуляторы.
Целевое положение в рамках изобретения может быть любым положением (позицией и ориентацией), которая не является исходным положением. Целевое положение может быть, но не обязательно, конечным положением. Предпочтительно, целевое положение является положением монтажа, в котором конструктивный элемент может монтироваться, например, на части самолета. Аналогичным образом, исходное положение может быть, но не обязательно, начальным положением.
Манипуляторы манипулируют конструктивным элементом предпочтительно синхронно, а именно независимо от рабочей ситуации, например ситуации обучения, рабочей ситуации и/или ситуации аварийной остановки.
В предпочтительном варианте выполнения изобретения конструктивному элементу присваивается система координат (целесообразно ведущая система координат), а соответствующим манипуляторам - базовые системы координат (целесообразно ведомые системы координат).
Кроме того, способ работы предпочтительно содержит по меньшей мере один из следующих этапов:
- определяют позицию и/или ориентацию конструктивного элемента в исходном положении;
- определяют позицию и/или ориентацию конструктивного элемента в целевом положении;
- определяют параметры опорного движения, при этом параметры опорного движения относятся к присвоенной конструктивному элементу системе координат и, например, описывают движения конструктивного элемента из позиции и/или ориентации в исходном положении в позицию и/или ориентацию в целевом положении, за счет чего предпочтительно задается ведущая кинематика;
- преобразуют параметры опорного движения в соответствующую базовую систему координат;
- манипуляторы манипулируют конструктивным элементом на основании соответствующих преобразованных параметров опорного движения (целесообразно относительно соответствующих систем координат манипуляторов), за счет чего соответствующие манипуляторы предпочтительно осуществляют ведомую кинематику.
Предпочтительно, за счет этого соответствующие базовые системы координат соотносятся с присвоенной конструктивному элементу системой координат, которая предпочтительно соответствует шестимерной системе координат (3 координаты положения и 3 координаты ориентации).
Как присвоенная конструктивному элементу система координат, так и соответствующие базовые системы координат манипуляторов целесообразно соотносятся с нулевыми точками, в частности так называемыми центральными точками инструментов (TCP - «центральная координата инструмента», или «нулевая точка инструмента»). Таким образом, особенно предпочтительно системы координат являются системами координат TCP.
Предпочтительно, нулевые точки соответствующих базовых систем координат манипуляторов фиксированы относительно соответствующих манипуляторов, за счет чего соответствующие базовые системы координат перемещаются вместе с соответствующими манипуляторами. В качестве альтернативного решения или дополнительно, нулевая точка присвоенной конструктивному элементу системы координаты может быть фиксирована относительно конструктивного элемента, за счет чего присвоенная конструктивному элементу система координаты перемещается вместе с конструктивным элементом.
Возможно, что соответствующая базовая система координат (соответственно ее нулевые точки или TCP) манипуляторов всегда следует за системой координат (соответственно ее нулевой точкой или TCP) конструктивного элемента, в частности, в то время как преобразование зафиксировано между манипуляторами и точками приложения манипуляторов к конструктивному элементу и/или преобразование зафиксировано между точками приложения манипуляторов к конструктивному элементу и заданной с помощью параметров опорного движения ведущей кинематики конструктивного элемента. Базирование целесообразно относится также к ведомым кинематикам манипуляторов и к ведущим кинематикам конструктивного элемента.
Предпочтительно, манипуляторы соединены с одним и тем же управляющим и/или вычислительным блоком, который предпочтительно может управлять совместно, в частности одновременно, манипуляторами.
В частности, можно управлять, например, синхронным манипулированием или по меньшей мере началом синхронного манипулирования с помощью манипуляторов одним и тем же управляющим и/или вычислительным блоком.
Кроме того, параметры опорного движения (целесообразно ведущая кинематика) и/или соответствующие преобразованные параметры опорного движения (целесообразно ведомые кинематики) могут содержаться (например, храниться в памяти, определяться и/или обрабатываться и т.д.) в одном и том же управляющем и/или вычислительном блоке.
Возможно, что манипуляторы синхронно соединены друг с другом через ведущий/ведомый интерфейс.
Манипуляторы могут быть одинаковой или различной конструкции и содержать, например, линейные, последовательные, декартовы и гибридные манипуляторы. Например, манипуляторы одного позиционера могут иметь одинаковую или различные конструкции. Точно так же манипуляторы различных позиционеров могут иметь одинаковую или различные конструкции.
Конструктивный элемент предпочтительно является сегментом оболочки, например, для наружной обшивки самолета (например, фюзеляжа самолета), который в целевом положении монтируется, например, на другой части самолета. В этом случае целевое положение соответствует положению монтажа.
Следует также упомянуть, что манипуляторы можно перемещать, например, по отдельности или группами. Кроме того, манипуляторы могут быть выполнены, например, одноосными или многоосными. Кроме того, манипуляторы можно синхронно перемещать, например, каскадным образом. Позиционеры и/или манипуляторы могут быть, например, обычными роботами или другими соответствующими автоматическими манипуляторами.
Следует также отметить, что можно выполнять синхронную коррекцию кинематик манипуляторов, например, в зависимости от отклонения и/или прогиба линейных осей манипуляторов и/или измеряемой нагрузки в точках захвата конструктивного элемента манипуляторами, что в принципе уже известно из DE 102011111758.3, так что полное содержание этой патентной заявки включается в данное описание.
Изобретение также относится к системе управления для системы позиционирования, в частности, для монтажа конструкции самолета, которая имеет по меньшей мере один манипулятор, при этом система управления во время работы выполняет указанный выше способ работы.
Кроме того, изобретение относится к системе позиционирования, в частности, для монтажа конструкции самолета, при этом система позиционирования содержит несколько позиционеров, которые имеют каждый по меньшей мере один манипулятор. Система позиционирования (в частности, манипуляторы) выполнены так, что она во время работы выполняет указанный выше способ работы. В качестве альтернативного решения или дополнительно, система позиционирования может содержать упомянутую систему управления.
Указанные выше признаки и варианты выполнения изобретения можно любым образом комбинировать друг с другом. Другие предпочтительные усовершенствованные варианты выполнения изобретения раскрыты в зависимых пунктах формулы изобретения или следуют из приведенного ниже описания предпочтительных примеров выполнения изобретения со ссылками на прилагаемые чертежи, на которых изображено:
фиг. 1 - система позиционирования и подлежащий манипулированию конструктивный элемент, согласно одному варианту выполнения изобретения, в изометрической проекции;
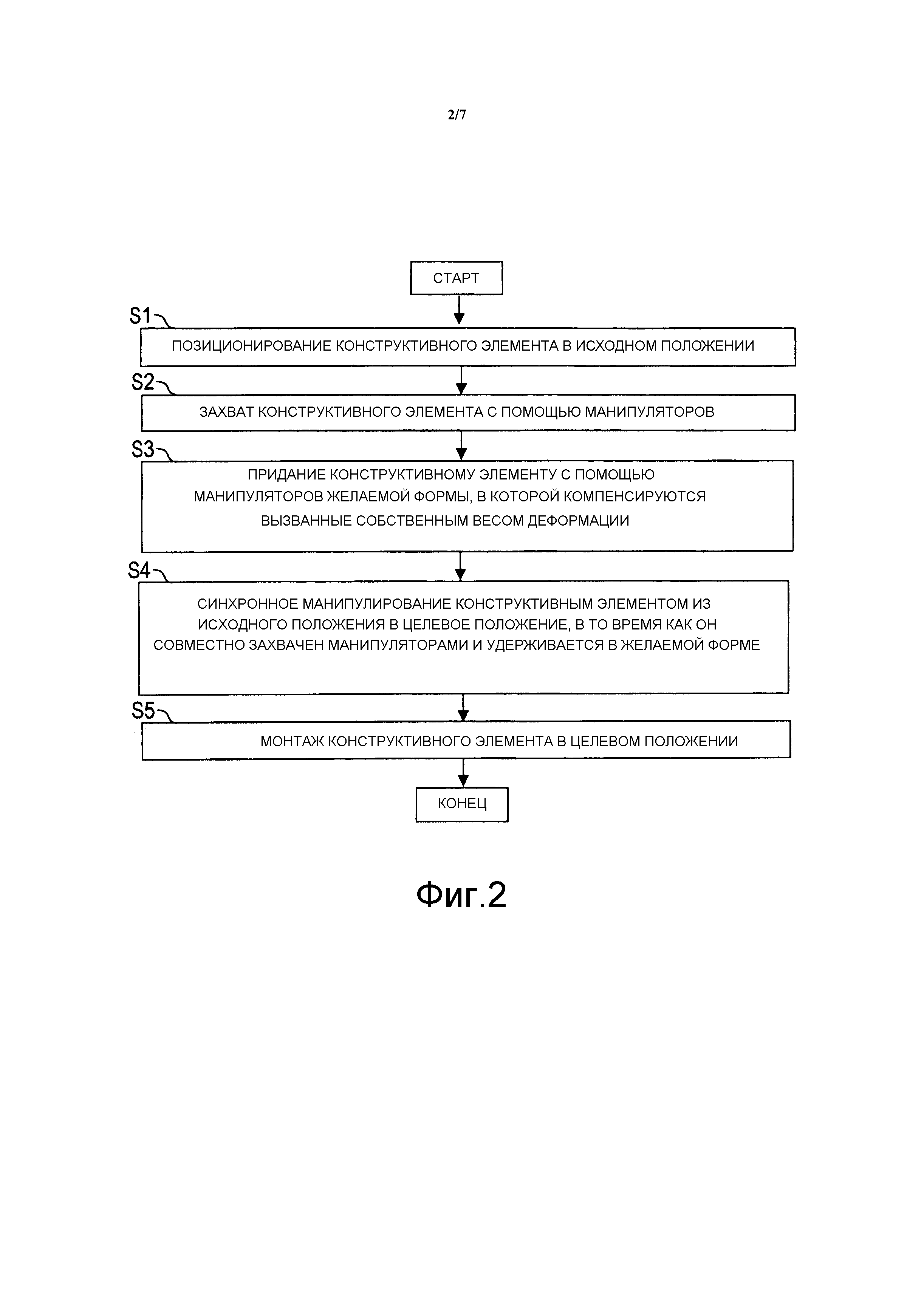
фиг. 2 - блок-схема способа работы системы позиционирования, согласно одному варианту выполнения изобретения;
фиг. 3 - блок-схема программного обеспечения для системы позиционирования, согласно одному варианту выполнения изобретения;
фиг. 4 - принцип преобразования между ведущей кинематикой и ведомой кинематикой, согласно одному варианту выполнения изобретения;
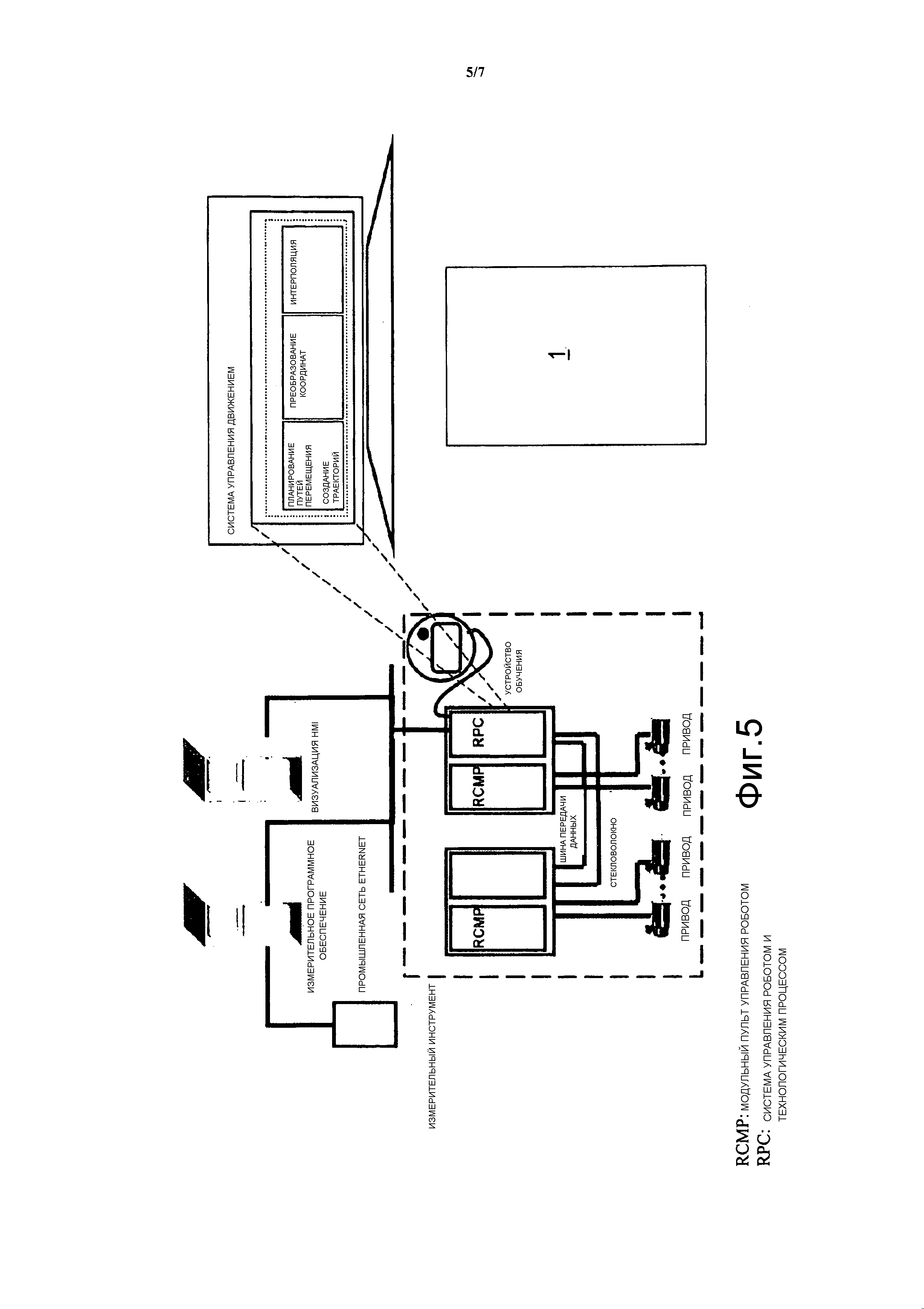
фиг. 5 - архитектура системы управления для системы позиционирования, согласно одному варианту выполнения изобретения;
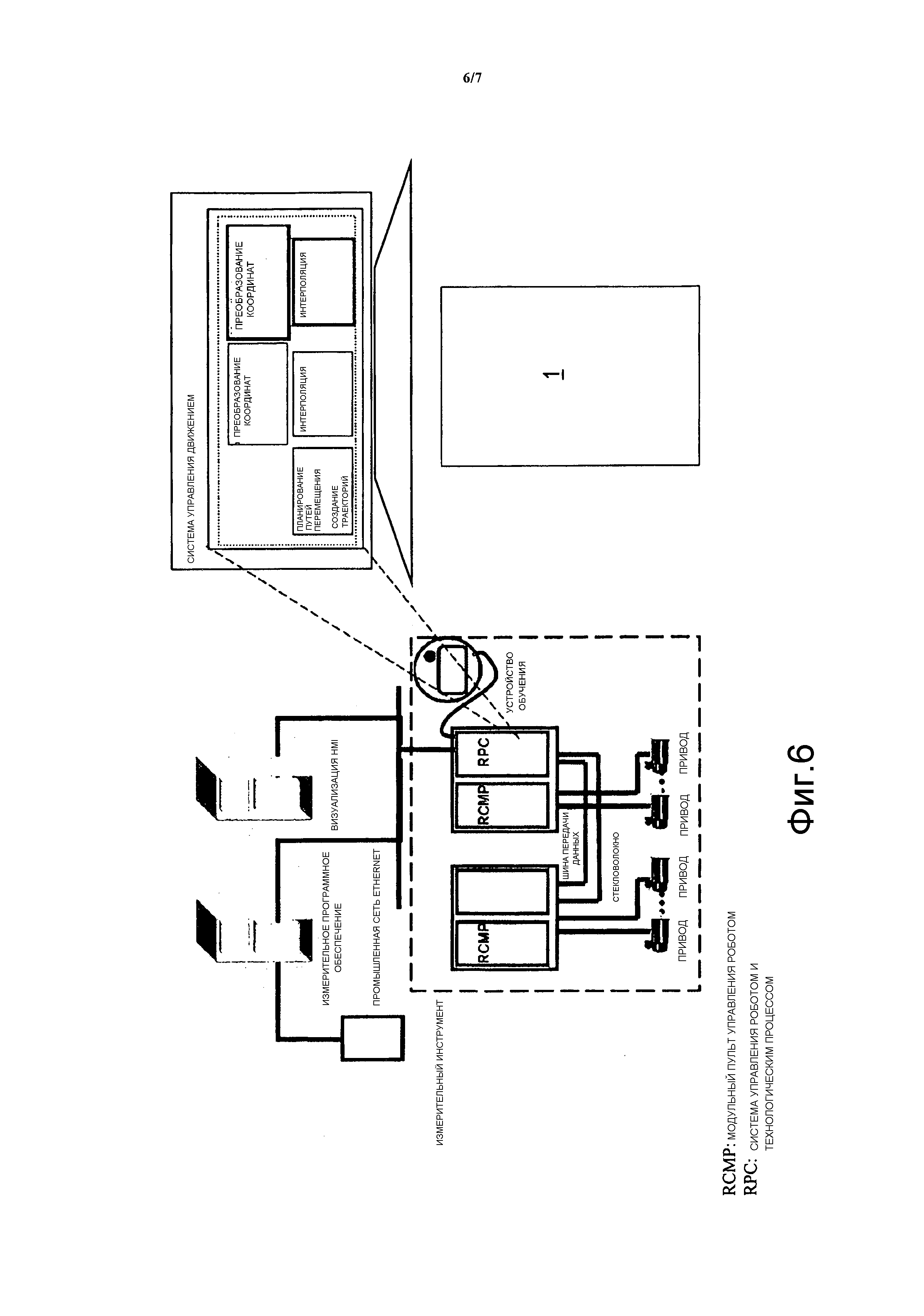
фиг. 6 - другая архитектура системы управления для системы позиционирования, согласно одному варианту выполнения изобретения;
фиг. 7 - еще одна другая архитектура системы управления для системы позиционирования, согласно одному варианту выполнения изобретения.
Варианты выполнения, описание которых приведено ниже со ссылками на чертежи, частично совпадают друг с другом, при этом аналогичные или идентичные части обозначены одинаковыми ссылочными позициями и для их пояснения делаются ссылки также на другие варианты выполнения или фигуры с целью исключения повторов.
На фиг. 1 показана в изометрической проекции система 1 позиционирования, согласно одному варианту выполнения изобретения, которая содержит несколько позиционеров 2а, 2b и 2с. Каждый из позиционеров 2а, 2b, 2с содержит три манипулятора, которые для простоты обозначены все ссылочной позицией М. Манипуляторы М могут иметь одинаковую или различную конструкцию и предназначены для захвата конструктивного элемента В в виде сегмента оболочки и синхронного манипулирования им, в то время как он совместно захватывается манипуляторами М.
Показанное на фиг. 1 положение может быть исходным положением конструктивного элемента В, в которое конструктивный элемент В приведен с помощью не изображенной крановой конструкции перед его захватом и съемом с помощью по меньшей мере некоторых из манипуляторов М.
Конструктивный элемент В является деформируемым и имеет без соответствующих противодействующих мер деформацию, вызванную собственным весом. Манипуляторы М выполнены так, что они захватывают конструктивный элемент В в желаемой форме или при необходимости придают ему сначала желаемую форму, в которой деформация, вызванная собственным весом, и внутренние напряжения по меньшей мере частично компенсируются. Кроме того, манипуляторы М выполнены так, что они транспортируют конструктивный элемент В в желаемой форме предпочтительно из исходного положения в целевое положение, в котором его можно, например, монтировать на другой части самолета.
Манипуляторы М соединены с одним и тем же управляющим/вычислительным блоком и тем самым управляются одним и тем же управляющим/вычислительным блоком, а именно, предпочтительно одновременно.
На фиг. 2 показана блок-схема выполнения способа, согласно изобретению, согласно одному варианту выполнения изобретения, например, для системы 1 позиционирования, описание которой приведено выше со ссылками на фиг. 1. В частности, блок-схема относится к способу работы манипуляторов М.
На первом этапе S1 конструктивный элемент В, например, с помощью крановой конструкции приводится в исходное положение. Конструктивный элемент 1 является легко деформируемым и имеет без соответствующих противомер деформацию, вызванную его собственным весом.
На этапе S2 конструктивный элемент В захватывается с помощью манипуляторов М и снимается с крановой конструкции.
На этапе S3 конструктивному элементу В с помощью манипуляторов М придается желаемая форма, или соответственно он удерживается в желаемой форме, в которой компенсируются деформации, вызванные собственным весом конструктивного элемента.
На этапе S4 конструктивный элемент В с помощью манипуляторов М синхронно переводится из исходного положения в целевое положение, в то время как он захвачен несколькими манипуляторами М и предпочтительно постоянно удерживается в желаемой форме.
На этапе S5 конструктивный элемент В в целевом положении монтируется, например, на другой части самолета.
На фиг. 3 показана блок-схема программного обеспечения для системы 1 позиционирования, согласно одному варианту выполнения изобретения. Блок-схема относится, в частности, к манипулятору М и, в частности, к его кинематике. Описываемый ход выполнения можно также применять соответственно в остальных манипуляторах. Блок-схема сама по себе является понятной, так что в данном случае не требуется дополнительного описания.
На фиг. 4 показан принцип преобразования между ведущей кинематикой и ведомой кинематикой относительно манипулятора М, согласно одному варианту выполнения изобретения. Описываемый принцип можно также соответственно применять и к остальным манипуляторам М.
Конструктивному элементу В присвоена ведущая кинематика и ведущая система координат, в то время как манипулятору М присвоена ведомая кинематика и базовая система координат (ведомая система координат). Ведущая система координат и ведомая система координат соотносятся с соответствующими нулевыми точками, соответственно с так называемыми центральными точками инструмента (TCP - «центральная координата инструмента», или «нулевая точка инструмента»), и поэтому могут называться также системами координат TCP.
На фиг. 4 представлены следующие ссылочные обозначения:
РК - система координат TCP ведомой кинематики (SK) соединена с ведущей кинематикой (МК) в точке Р;
QМК - система координат TCP МК в точке Q;
ТК=>МК - преобразование системы координат TCP SK в систему координат TCP МК. Это преобразование определено, например, на фиг. 3 на этапе S4;
ТМК - перемещение, в частности поступательное движение и вращение, системы координат TCP МК от точки Q к точке Q';
ТК - результирующее преобразование системы координат TCP SK в соединении с МК от точки Р к точке Р'.
TCP - система координат TCP SK следует непрерывно за системой координат TCP МК, в то время как ТК->МК фиксирована, как показано, например, на фиг. 3 на этапе S5. Определяемые параметры опорного движения, которые относятся к ведущей системе координат и которые описывают движение (например, кривую прохождения, позицию, ориентацию, скорость, ускорение и т.д.) конструктивного элемента В, уже преобразованы в ведомую систему координат манипулятора М или преобразуются в ведомую систему координат манипулятора М. За счет этого манипулятор М может манипулировать конструктивным элементом В в зависимости от преобразованных параметров опорного движения, которые относятся к ведомой системе координат манипулятора М. Показано, что параметры опорного движения описывают ведущую кинематику, в то время как манипулятор М выполняет ведомую кинематику.
Ведомая система координат манипулятора М фиксирована относительно манипулятора М, за счет чего она перемещается вместе с манипулятором М. В качестве альтернативного решения или дополнительно, ведущая система координат конструктивного элемента В может быть фиксирована относительно конструктивного элемента В, за счет чего она перемещается вместе с конструктивным элементом В.
Как показано на фиг. 4, ведомая система координат манипулятора М всегда следует за ведущей системой координат конструктивного элемента В. В частности, ведомая система координат манипулятора М соотносится с присвоенной конструктивному элементу В ведущей системой координат и следует ей, в то время как преобразование между манипулятором М и точкой приложения манипулятора М к конструктивному элементу В фиксировано и/или фиксировано преобразование между точкой приложения манипулятора М к конструктивному элементу В и ведущей кинематикой конструктивного элемента В.
На фиг. 5 показана архитектура системы управления для системы 1 позиционирования, в частности, ее манипуляторов М, согласно одному варианту выполнения изобретения. Система управления предназначена для манипуляторов М, которые имеют одинаковую конструкцию. На фиг. 5 показана архитектура системы управления для системы 1 позиционирования, которая используется, например, для монтажа секций фюзеляжа из отдельных сегментов оболочки и решетки пола. Система 1 позиционирования может состоять, например, из двенадцати декартовых манипуляторов М, содержащих каждый три приводные оси. Таким образом, система управления («Motion Controller» контроллер движения) охватывает, например, двенадцать идентичных преобразований.
Управляющий/вычислительный блок для управления манипуляторами М обозначен RPC («Robot and Process Control» система управления роботом и технологическим процессом). Позицией RCPM (Robot Control Modular Panel модульный пульт управления роботом) обозначен модульный шкаф управления, в то время как позицией HMI обозначен человеко-машинный интерфейс (Human-Machine-Interface).
На фиг. 6 показана другая архитектура системы управления для системы 1 позиционирования, в частности, ее манипуляторов М, согласно другому варианту выполнения изобретения. Особенностью этого варианта выполнения является то, что отдельные манипуляторы М имеют различные структуры. Архитектура системы управления предназначена для системы 1 позиционирования, которая состоит, например, из 6 манипуляторов М с 18 осями. Пять манипуляторов М имеют, например, декартову структуру, в то время как остальные манипуляторы М имеют, например, параллельную структуру.
На фиг. 7 показана архитектура системы управления для системы 1 позиционирования, содержащая несколько манипуляторов М и контроллеров движения, согласно одному варианту выполнения изобретения.
Управление предназначено для контролирования систем из нескольких манипуляторов М с отдельными контроллерами движения (системами управления движением).
Каждый манипулятор М имеет собственную систему управления. В качестве альтернативного решения или дополнительно, собственная система управления может иметь также манипуляторный блок из двух или больше манипуляторов М.
Ведущий CPU (Central Processing Unit - центральный процессор) обеспечивает планирование движения и/или пространственные траектории отдельных манипуляторов М (в частности, TCP манипуляторов).
Кроме того, ведущий CPU является ответственным, например, за длительность тактов, за которые передаются вычисленные пакеты данных, и/или за синхронизацию начала движения манипуляторов М (которые связаны, например, с помощью входов и выходов (I/O (Input/Output)).
Изобретение не ограничивается указанными выше предпочтительными примерами выполнения. Возможно множество вариаций и модификаций, в которых также используется идея изобретения и которые поэтому входят в объем защиты. Кроме того, правовая защита распространяется на объект и признаки зависимых пунктов формулы изобретения, независимо от их подчиненности.
Реферат
Изобретение относится к способу позиционирования конструктивного элемента (В), в частности, при монтаже конструкции самолета посредством системы (1) позиционирования. Система (1) позиционирования содержит несколько позиционеров (2а, 2b, 2с), каждый из которых имеет по меньшей мере один манипулятор (М). Манипуляторы (М) захватывают конструктивный элемент (В) и синхронно манипулируют им, в то время как он совместно захвачен манипуляторами (М). Каждому манипулятору (М) присваивают базовую систему координат, определяют позицию и ориентацию конструктивного элемента (В) в исходном положении и в целевом положении. Определяют параметры опорного движения, относящиеся к системе координат, присвоенной конструктивному элементу (В), и описывают движение конструктивного элемента (В) из позиции и ориентации в исходном положении в позицию и ориентацию в целевом положении. Преобразовывают параметры опорного движения в соответствующую базовую систему координат и посредством манипуляторов (M) манипулируют конструктивным элементом (В) на основании соответствующих преобразованных параметров опорного движения. Изобретение обеспечивает увеличение точности и упрощение позиционирования конструктивных элементов, а также удержание их в требуемой форме. 3 н. и 17 з.п. ф-лы, 7 ил.
Комментарии