Храповой механизм со свободным ходом - RU2011907C1
Код документа: RU2011907C1
Чертежи




Описание
Изобретение относится к машиностроению, в частности к механизмам с включаемым свободным ходом.
В известном [1] механизме свободного хода две части сцепления в виде ступицы и втулки соединяются посредством радиально подпружиненных собачек. Средство для выведения собачек из зацепления с выемками на ступице или втулке выполнено в виде управляемого кольца, установленного на втулке с возможностью ограниченного поворота. Во втулке размещены управляющие элементы.
Известный механизм обеспечивает свободный ход только при передаче вращения в одном направлении.
Задачей изобретения является обеспечение свободного хода при передаче вращения в обоих направлениях.
Это обеспечивается за счет того, что механизм снабжен дополнительными собачками, расположенными в первой части сцепления с возможностью зацепления при изменении направления вращения с выполненными на второй части сцепления дополнительными выемками, управляющие элементы расположены между двумя противоположно ориентированными собачками и выполнены с дополнительными, направленными противоположно основным, управляющими поверхностями для воздействия на дополнительные собачки.
Во включенном положении собачки удерживаются в выемках первой части сцепления управляющими элементами. Каждый управляющий элемент выполнен зеркально симметричным относительно радиальной плоскости. Втулка может быть первой частью сцепления, а управляющие элементы воздействуют на собачку снизу. Управляющие поверхности собачек и управляющих элементов расположены в радиальном направлении на увеличивающемся в направлении, противоположном направлению вращения привода расстоянии от оси вращения. Каждая собачка выполнена с пазом в средней части, а управляющей поверхностью является дно паза.
Управляющие элементы располагаются в отверстиях с возможностью перемещения в окружном направлении и контакта в конечных положениях с одной из ограничивающих в окружном направлении поверхностей отверстий. Управляющие элементы соединяются с кольцом разъемно. Первая часть сцепления может быть выполнена с радиальными, выступающими над контуром кольца, упорными выступами для контакта с неподвижным упором или включающим устройством с возможностью перекрытия упорных выступов наклонными поверхностями. Включающее устройство может быть выполнено в виде подпружиненной цапфы или в виде качающегося Г-образного рычага с упорными поверхностями.
Механизм может быть снабжен тормозным устройством для контакта с управляющим кольцом. Управляющее кольцо в среднем положении обеспечивает одновременный ввод всех собачек в зацепление с выемками второй части сцепления. Механизм снабжен подвижной в осевом направлении управляющей втулкой с пересекающей ось вращения прорезью, зафиксированной в окружном направлении. В управляющем кольце радиально закреплена цапфа, конец которой размещен с возможностью перемещения в прорези втулки. Средство перемещения управляющей втулки в осевом направлении выполнено в виде приводной вилки или другого элемента, расположенного в выполненной на втулке канавке.
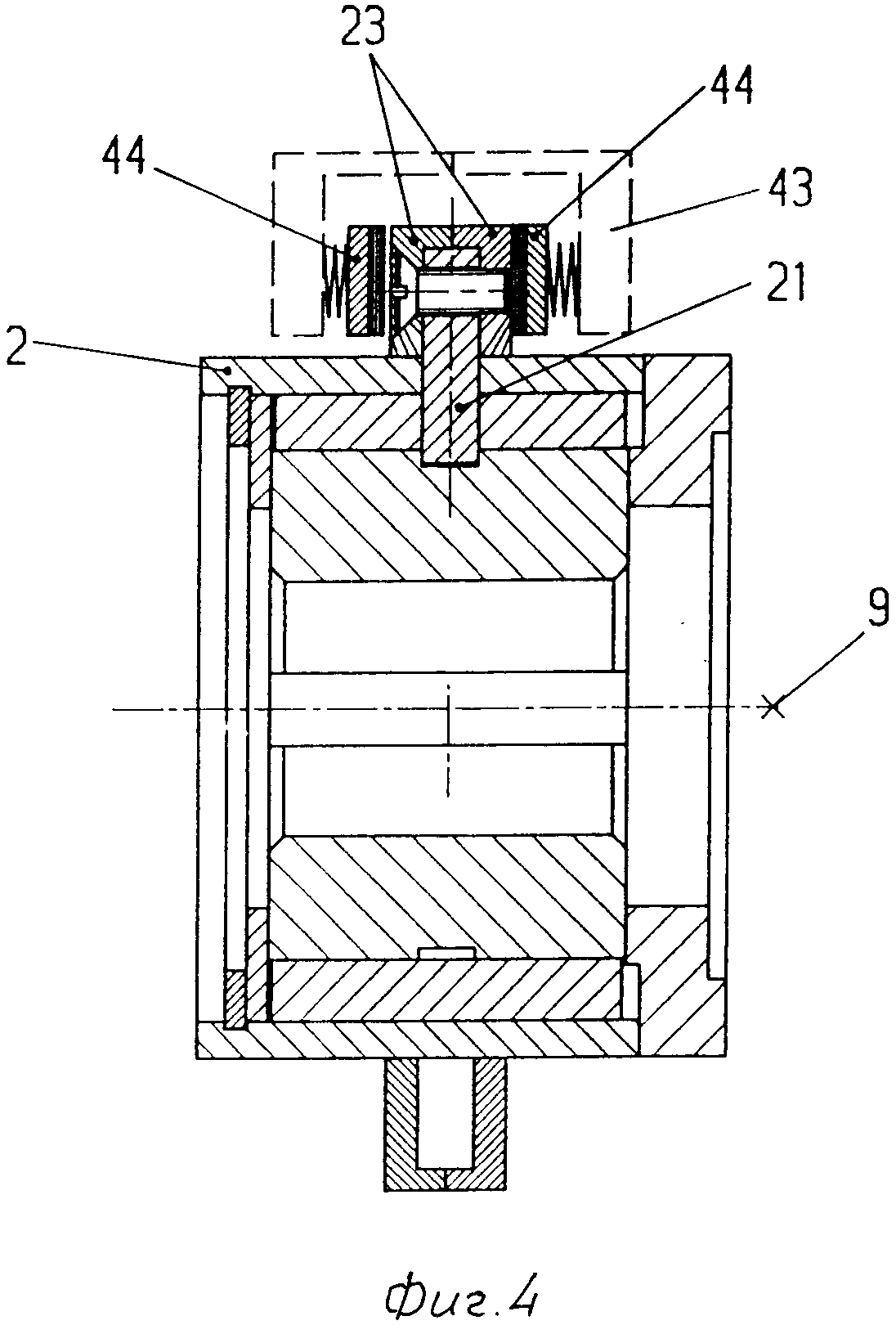
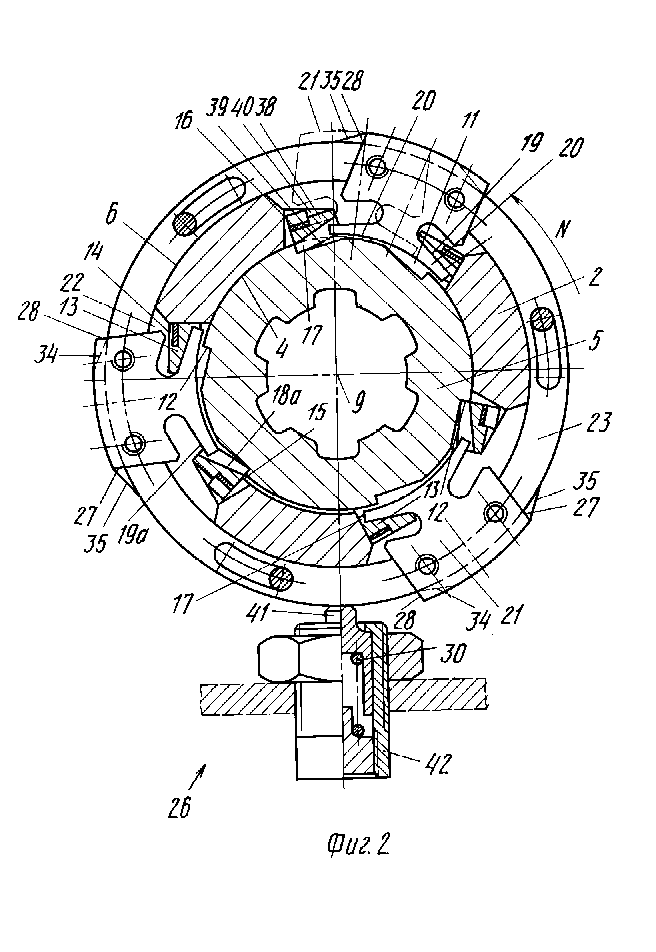
На фиг. 1 представлен храповой механизм, продольный разрез; на фиг. 2 - то же, поперечный разрез; на фиг. 3 - вид на стрелке А на фиг. 1; на фиг. 4 - храповой механизм с тормозным устройством для управляющего кольца; на фиг. 5 - храповой механизм с альтернативным исполнением тормозного устройства или управляющего кольца в запирающем положении для обоих направляющих вращения; на фиг. 6 - то же, поперечный разрез.
Храповой механизм имеет втулку 2 как первую часть сцепления, представляющую собой ведущую часть сцепления. На втулку 2 сбоку наварен фланец 3 для присоединения сцепления со свободным ходом к приводу. Втулка 8 муфты сцепления имеет центральное цилиндрическое отверстие 4, в котором находится ступица 5 ведомого диска сцепления с внешней поверхностью 6. Ступица 5 прилегает торцовой поверхностью к радиальной поверхности фланца 3, ее другая торцовая поверхность прилегает к опорной шайбе 7, которая зафиксирована во втулке в аксиальном направлении с помощью упорного кольца 8. Ступица диска сцепления 5 удерживается с возможностью относительного поворота вокруг оси 9 по отношению к втулке муфты сцепления.
Ступица 5 имеет центральное отверстие, присоединительное отверстие 10, которое, например, снабжено многопазовым профилем для присоединения к приводной цапфе, приводимой в действие через храповый механизм части машины или для привода колес автомобиля. На внешней поверхности 6 ступицы 5 выполнены первые выемки 11 для первых собачек 13 и вторые выемки 39 для вторых собачек 30, каждая из которых имеет радиально направленную опорную поверхность 12.
При передаче вращающегося момента в направлении вращении N вторые собачки 38, размещенные во вторых выемках 40 втулки 2 муфты сцепления, своими опорными поверхностями 15 упираются в опорные поверхности 12 выемок 39 ступицы 5. Собачки 13 и 38 с помощью пружин 16, имеющих опору в выемках 14, 40 втулки 2, прижимаются в направлении к выемкам 11 и 39 ступицы 5. Собачки 13, 38 размещены в выемках 14, 40, соответственно выемкам 11, 39 ступицы 5 и распределены по окружности. Собачки 13, 38 имеют посередине длины пазы 17, которые имеют управляющие поверхность 18, 18а. В соприкосновение с этими управляющими поверхностями в зависимости от направления вращения входит одна из управляющих поверхностей 19, 19а обоих узлов управления 20, выполненного зеркально симметрично относительно радиуса управляющего элемента 21.
Управляющие элементы 21 проходят сквозь радиальные отверстия 22 во втулке сцепления 2 и укреплены с помощью винтов 24 на общем управляющем кольце 23. Управляющие элементы 21 могут поворачиваться в отверстиях 22, вокруг оси вращения 9. За счет такого перемещения управляющее кольцо 23 перемещается только по внешней поверхности 25 втулки сцепления 2. Боковые смещения и фиксацию принимают на себя управляющие элементы 21. Установку управляющего кольца 23 и тем самым управляющих элементов 21 втулки сцепления 2 относительно собачек 13, 38 осуществляются включающим устройством.
На фиг. 2 и 3 представлены альтернативные включающие устройства 26, 26а, воздействующие на упорные выступы 27, 28, образованные либо выступающими над внешней поверхностью управляющего кольца 23 поверхностями управляющих элементов 21, либо приливами на управляющем кольце 23. Упорные выступы 27, 28 в зависимости от направления вращения привода N и N1 освобождаются соседними косыми поверхностями 35, 34, которые выступают над внешним контуром втулки сцепления 2.
В примере исполнения, представленном на фиг. 2, косые поверхности 35 перекрывают упорные выступы 27 управляющего элемента 21, так что при вращении втулки сцепления в направлении N цапфы 41 наезжают, скользя на косые поверхности 35, и их упорная поверхность не может упереться в упорные выступы 27.
Для включения храпового механизма на передачу вращающего момента в направлении N согласно фиг. 3 необходимо так переключить привод, чтобы ведущая втулка 2 вращалась в противоположном N направлении, при этом цапфа попадает своей упорной поверхностью на упорный выступ 28. При дальнейшем повороте втулки 2 в новом направлении вращения N1 управляющее кольцо остается неподвижным и переставляется относительно втулки. При этом управляющие поверхности 18, 19 управляющего элемента 21 и собачки 13 отводятся друг от друга. Собачки 13 получают возможность под действием пружины 16 отклониться радиально внутрь из выемок 14 втулки 2, чтобы вступить в зацепление с выемками 21 ступицы 5 при вращении втулки 2 в направлении N1 . При перестановке управляющего кольца 23 относительно втулки сцепления 2 поднимающиеся косые поверхности 35 попадают в зону упорных выступов 27 и перекрываются ими. При этом вторые собачки 28 за счет скольжения их управляющих поверхностей 18а по поверхностям 19а управляющего элемента 21 выводятся из вторых выемок 39 ступицы 5, в то время как собачки 13 опускаются в выемки 11 ступицы 5 и увлекают их за собой.
Относительная перестановка в направлении вращения втулки сцепления 2 и управляющего кольца 23 друг относительно друга может быть ограничена либо за счет упора управляющего элемента 21 в ограничивающие поверхности отверстий 22 в направлении окружности, либо соответству- ющим выбором длины одного или нескольких пазов 36 в управляющем кольце 23, в каждый из которых входит упорная цапфа 37.
Для передачи вращающего момента Г-образный рычаг 29 выводится из соприкосновения с внешним контуром управляющего кольца 23. Он перемещается вновь лишь тогда, когда должно произойти выключение. Последнее происходит аналогично включению, однако при этом упорная поверхность 33 входит в соприкосновение с упорным выступом 28 и осуществляют освобождение путем подъема собачек 13.
На чертеже храповой механизм 1а находится в положении передачи вращающего момента в направлении вращения N1, как направлении привода втулки 20. Вторые собачки 38 находятся в зацеплении со ступицей сцепления 5, в то время как первые собачки 13 выведены из выемок 11 ступицы 5 с помощью управляющих поверхностей 18, 19. Для переключения предусмотрено включающее устройство 26, содержащее радиально поджатую пружиной 30 цапфу 41, перемещающуюся в неподвижно закрепленной втулке 42.
В изображенном положении цапфы 41 при направлении вращения N перемещаются радиально наружу под воздействием косых поверхностей 35, которые прикрывают упорные выступы 27. При направлении вращения привода противоположном N/= N1 / цапфа 41 упирается в упор 28. При этом управляющее кольцо 23 переставляется по отношению к втулке сцепления 2, причем вторые собачки 38 поднимаются из выемок 39 ступицы сцепления 5 и полностью перемещаются во вторые выемки 40 втулки сцепления 2 за счет набегания управляющих поверхностей 18а, 19а. Одновременно управляющие элементы 21 освобождают первые собачки 13, которые для передачи вращающего момента входят в выемки 11 (фиг. 3).
Включающее устройство 26а (фиг. 3) состоит из подпружиненного пружиной 30 Г-образного рычага 29, который может качаться вокруг неподвижно закрепленной оси поворота 31 и имеет две упорные поверхности 32, 33, которые могут взаимодействовать с упорными поверхностями 27, 28. Поскольку храповой механизм 1а предназначен для передачи вращающего момента при двух направлениях вращения, выведение из работы включающего устройства 26а не требуется.
При всех вариантах исполнения ступица 5 и втулка 2 могут прокручиваться друг относительно друга в каждом из направлений вращения N и N1. При этом находящиеся в положении передачи вращающегося момента собачки 13 или 38 отклоняются, преодолевая усилие нагруженных их пружин 16.
В храповом механизме (фиг. 4) управляющие элементы обхвачены управляющим кольцом 23, в которое вводятся с помощью цилиндро-поршневой группы подпружиненные тормозные колодки 44, опирающиеся на перемещаемую параллельно оси вращения 9, но не поворачивающуюся скобу 43. Цилиндро-поршневая группа, находящаяся под давлением, опирается стержнем поршня на тормозную колодку 44, а цилиндром - на включающую скобу 43. В храповом механизме согласно фиг. 5 и 6 наряду с возможностью переключения на взаимно противоположные направления вращения N и N1, имеется также возможность блокировки свободного хода храпового механизма, при которой как первые 13, так и вторые собачки 38 могут попадать в соответствующие им выемки 14 и 39 ступицы 5.
Для этого необходимо предусмотреть внешнее включающее устройство 26в, которое допускает дополнительное промежуточное положение, при котором управляющие поверхности 18 и 19, а также 18а и 19а управляющих элементов 21 находятся вне соприкосновения друг с другом.
На фиг. 5 в средней зоне показан отрезок окружности, включающий расположение управляющей цапфы 47 и управляющей прорези 45.
При этом видно, что управляющая прорезь 45 проходит косо, пересекая ось вращения 31. Далее даны различные положения управляющей цапфы 47 в прорези 45. Управляющие элементы 21 являются составными частями управляющего кольца 23.
Из фиг. 6 видно, что управляющие элементы 21 входят в канавку 50 ступицы сцепления. В верхней половине собачки 13, 38 находятся в зацеплении со ступицей 5, в то время как в нижней половине показано только зацепление собачки 38 для направления вращения N. Управляющая цапфа 17, направленная радиально, введена в управляющее кольцо 23 и расположена радиально в управляющей прорези 45 управляющей втулки 46. Последняя не вращается, но может перемещаться аксиально вдоль оси вращения 31, для этого она перемещается между направляющими.
Для перестановки служит включающий элемент 48, который входит во включающую канавку 49 управляющей втулки 46.
Реферат
Использование: изобретение относится к машиностроению и служит для обеспечения включаемого свободного хода. Сущность: механизм содержит втулку 2 и ступицу диска 5 сцепления, а также радиально подпружиненные собачки 13 и 38 для каждого направления вращения. Собачки имеют возможность входить в зацепление с выемками 11 и 39. Управление перемещением собачек осуществляется управляющим кольцом 23 с управляющими элементами. Не участвующие в передаче вращения собачки полностью выводятся из выемок. Приводятся различные варианты выполнения и расположения управляющих поверхностей на собачках и управляющих элементах. Перемещение управляющего кольца осуществляется включающим устройством, которое может нагружаться тормозным усилием. 13 з. п. ф-лы, 6 ил.
Комментарии