Устройство для определения момента затупления режущего инструмента - RU2025253C1
Код документа: RU2025253C1
Чертежи

Описание
Изобретение относится к автоматизации машиностроения, в частности к устройствам контроля состояния режущего инструмента в процессе обработки, и может быть использовано на специальных станках с ЧПУ в гибких производственных модулях и системах.
Известно устройство для автоматической подналадки и контроля износа режущего инструмента, которое содержит датчик износа, два амплитудных детектора, два сумматора, два элемента памяти, датчик момента вращения, два усилителя, два компаратора нижнего уровня, два компаратора верхнего уровня, элемент задержки, компаратор нуля, элемент И, элемент ИЛИ. Первый выход первого амплитудного детектора соединен с первым входом первого сумматора, выход которого через первый усилитель подключен к входам первых компара- торов верхнего и нижнего уровней, второй выход первого амплитудного детектора подключен к первому входу первого элемента памяти, выход которого соединен со вторым входом первого сумматора. Второй вход первого элемента памяти является управляющим. Выход первого компаратора нижнего уровня через элемент задержки подключен к входу компаратора нуля, выход которого соединен с первым входом элемента И, выход которого соединен с системой ЧПУ. Выход первого компаратора верхнего уровня соединен с первым входом элемента ИЛИ, выход которого является управляющим входом элемента ИЛИ, выход которого является управляющим выходом. Первый выход второго амплитудного детектора подключен к первому входу второго сумматора, выход которого через второй усилитель подключен к входам вторых компараторов нижнего и верхнего уровней. Второй выход второго амплитудного детектора подключен к первому входу второго элемента памяти, выход которого соединен со вторым входом второго сумматора. Второй вход второго элемента памяти является управляющим, выход второго компаратора нижнего уровня подключен ко второму входу элемента И. Выход второго компаратора верхнего уровня подключен ко второму входу элемента ИЛИ. Устройство снабжено двумя элементами АРУ, третьим и четвертым элементами памяти, тремя сравнивающими усилителями, двумя задатчиками, двумя индикаторами. Первый вход первого элемента АРУ подключен к датчику износа. Второй вход первого элемента АРУ соединен с выходом третьего элемента памяти, первый вход которого подключен к выходу первого сравнивающего усилителя. Выход первого элемента АРУ соединен с входом первого амплитудного детектора. Первый вход первого сравнивающего усилителя соединен с выходом первого усилителя и подключен к первому индикатору. Второй вход первого сравнивающего усилителя подключен к первому задатчику. Первый вход второго элемента АРУ подключен к датчику момента вращения. Второй вход второго элемента АРУ соединен с выходом четвертого элемента памяти, первый вход которого подключен к выходу второго сравнивающего усилителя. Вторые входы третьего и четвертого элементов памяти является управляющими, выход второго элемента АРУ соединен со входом второго амплитудного детектора. Первый вход второго сравнивающего усилителя соединен с выходом второго усилителя и подключен ко второму индикатору. Второй вход второго сравнивающего усилителя подключен ко второму задатчику. Выход третьего сравнивающего усилителя подключен к третьему входу второго сумматора. Первый вход третьего сравнивающего усилителя соединен с силовой цепью питания рабочего привода, а второй вход третьего сравнивающего усилителя подключен к цепи стабилизированного опорного напряжения.
Недостаток данного устройства - низкая точность определения момента затупления режущего инструмента, т. к. состояние режущего инструмента определяется только по амплитудным значениям виброакустического и силового сигналов, не позволяющим определять момент начала затупления режущего инструмента и мелкие разрушения инструмента. Нормирование (масштабирование) сигналов oсуществляется при установившихся режимах резания после того как произошло врезание инструмента. В этом случае уже произошло повышение температуры в зоне резания, на которую влияет начавшийся износ при приработке инструмента и возможно при приработке микросколы инструмента. Все это влияет на уровень сигнала, который масштабируется, т. е. происходит масштабирование сигнала уже с признаками износа, микросколов инструмента, которые уже невозможно классифицировать, определить их физическую природу. Искаженный уровень сигналов ведет к неверному выбору порогов срабатывания устройства и снижает точность определения момента затупления режущего инструмента.
Цель изобретения - повышение точности определения момента затупления режущего инструмента.
Поставленная цель достигается тем, что устройство для определения момента затупления режущего инструмента содержит соединенные последовательно виброакустический датчик, первый автоматический регулятор усиления, первый амплитудный детектор, первый сумматор, первый усилитель, первый компаратор и элемент ИЛИ, соединенные последовательно датчик силового параметра, второй автоматический регулятор усиления, второй амплитудный детектор, второй сумматор, второй усилитель, и второй компаратор, выход которого связан с входом элемента ИЛИ, выход которого предназначен для связи с системой ЧПУ, первый сравнивающий усилитель, вход которого связан с выходом первого усилителя, а выход связан через первый элемент памяти с входом первого автоматического регулятора усилителя, второй элемент памяти, вход которого связан с выходом первого амплитудного детектора, а выход - с входом первого сумматора, второй сравнивающий усилитель, вход которого связан с входом второго усилителя, а выход - через третий элемент памяти с входом второго автоматического регулятора усиления, третий сравнивающий усилитель, первый вход которого соединен с силовой цепью питания рабочего привода, второй вход - с цепью стабилизированного опорного напряжения, а выход - с входом второго сумматора, четвертый элемент памяти, вход которого связан с выходом второго амплитудного детектора, а выход - с входом второго сумматора, первый и второй индикаторы, связанные соответственно с выходами первого и второго усилителей, третий и четвертый компараторы, выходы которых связаны с входом первого элемента И, пятый компаратор. Вторые входы первого, второго, третьего и четвертого элементов памяти являются управляющими.
В устройство введены первый и второй блоки определения экстремума, первый и второй ключи, второй, третий, четвертый и пятый элементы И, шестой, седьмой, восьмой, девятый и десятый компараторы, первый, второй, третий и четвертый блоки сравнения, первый и второй пиковые детекторы, третий и четвертый усилители. Выходы виброакустического датчика, первого автоматического регулятора усиления и второго элемента И через первый ключ связаны с входом первого блока определения экстремума, второй вход которого является управляющим, а выходы связаны с входами второго элемента памяти, второго элемента И, первого пикового детектора, третьего усилителя и первого блока сравнения. Выход первого автоматического регулятора усиления связан с входом шестого компаратора, выход которого соединен с входом второго элемента И. Выходы датчика силового параметра, второго автоматического регулятора усиления и третьего элемента И через второй ключ связаны с входом второго блока определения экстремума, второй вход которого является управляющим, а выходы связаны с входами второго блока сравнения, четвертого элемента памяти, третьего элемента И, четвертого усилителя и второго пикового детектора, выход второго автоматического регулятора усиления связан с входом седьмого компаратора, выход которого соединен с входом третьего элемента И. Выходы третьего усилителя и первого пикового детектора связаны с входом третьего блока сравнения, выходы которого соединены с входами третьего и пятого компараторов, выходы второго пикового детектора и четвертого усилителя связаны с входом четвертого блока сравнения, выходы которого соединены с входами четвертого и восьмого компаратора. Выходы пятого и восьмого компаратора связаны с входами четвертого элемента И. Выход первого блока сравнения связан с входом девятого компаратора. Выход второго блока сравнения соединен с входом десятого компаратора. Выходы девятого и десятого компаратора связаны с входами пятого элемента И, а выходы четвертого и пятого элементов И с входами элемента ИЛИ.
Наличие отличительных признаков позволяет сделать вывод о соответствии данного технического решения критерию изобретения "новизна".
Перед началом механической обработки выполняют ускоренное определение оптимальных технологических параметров процесс оптимизации, например определяют оптимальную скорость резания. Процесс оптимизации осуществляют согласно способу оптимизации процесса резания при кратковременных испытаниях инструментом детали. Скорость резания для проведения этих испытаний выбирают из допустимого интервала варьирования скоростей для конкретной пары инструмент-деталь (Обработка металлов резанием. Справочник/ Под ред. А. А. Панова. М.: Машиностроение, 1988, с. 646-676).
Оптимизация процесса резания именно на той же детали, которая предназначена для обработки, позволяет учесть все физико-химические, энергетические и другие факторы, характеризующие данную деталь, что позволяет повысить точность определения момента износа режущего инструмента в процессе обработки.
Процесс определения оптимальной скорости резания осуществляется по двум абсолютно симметричным каналам - виброакустическому и силовому. Выбор оптимальных технологических параметров производят по первому наименьшему отрицательному приращению уровня ускорения звуковых колебаний и первому наибольшему приращению активной мощности двигателя шпинделя.
Сигнал с выхода виброакустического датчика поступает на первый вход первого блока определения экстремума через нормально замкнутые контакты первого ключа. С выхода первого блока определения экстремума, с которого снимаются текущие значения ускорений виброакустических колебаний (работу блока определения экстремума см. ниже), сигнал поступает одновременно на вход третьего усилителя и первого пикового детектора. В пиковом детекторе происходит запоминание и временное хранение (задержка) информации значений ускорений виброакустического сигнала, а усилитель пропускает текущие значения ускорений виброакустического сигнала и одновременно работает как согласующий, чтобы сигналы с выхода пикового детектора и усилителя поступали на вход третьего блока сравнения синфазными. В блоке сравнения происходит сравнение между начальным значением ускорений виброакустического сигнала и текущих значений ускорений. Силовой сигнал при определении оптимальной скорости работает абсолютно симметрично виброакустическому каналу, только в виброакустическом канале сигнал с выхода блока сравнения (третьего блока сравнения) поступает на вход пятого компаратора (компаратор "≅0"), а в силовом канале сигнал с выхода блока сравнения (четвертого блока сравнения) поступает на вход седьмого компаратора (компаратор ">0"). Выходы данных компараторов подключены к первому и второму входу элемента И (четвертый элемент И). Как только на входы данного элемента И поступает сигнал с обоих компараторов, элемент И выдает сигнал о достижении оптимальной скорости резания, при этом пятый компаратор выдает сигнал при наличии первого наименьшего отрицательного приращения уровня ускорения акустического сигнала, а четвертый компаратор - по наибольшему приращению силового сигнала.
Определив оптимальную скорость, осуществляют врезание режущего инструмента в деталь и начинают ее обработку. Состояние режущего инструмента контролируют по физическим параметрам, в качестве которых выбирают величины виброакустического и силового сигналов, а также значения их приращений за единицу времени. Запоминают пороговые значения данных физических параметров и о моменте затупления режущего инструмента судят по достижению текущих значений этих параметров их пороговых значений.
В процессе врезания контролируют значения физических параметров до момента времени, соответствующего первым экстремумам как виброакустического, так и силового сигналов, и устанавливают пороговые значения физических параметров. В качестве пороговых значений выбирают амплитудные значения первых экстремумов виброакустического и силового сигналов и значения максимальных приращений этих сигналов.
Выбор пороговых значений контролируемых физических параметров на участке врезания (до момента достижения сигналами первых экстремумов) обусловлен тем, что период врезания - самый тяжелый для режущего инструмента, сопровождается самым интенсивным износом обрабатываемой детали (абразивный износ). В дальнейшем при обработке детали аналогичный процесс возникает только в результате износа самого инструмента (выкрашивание, сколы и т. д.).
Таким образом, в процессе обработки контролируют четыре физических параметра: виброакустический сигнал А; приращение виброакустического сигнала в единицу времени dА/dt; силовой сигнал Р; приращение силового сигнала в единицу времени dР/dt.
Контроль затупления режущего инструмента только по амплитуде сигналов не позволяет с достаточной точностью судить о затуплении инструмента, т. к. могут возникать колебания амплитуд этих сигналов, связанные с неоднородностью материалов детали и режущего инструмента или колебаниями припуска, которые могут вызывать ложные сигналы об износе инструмента. Кроме того, контроль только амплитудных значений сигналов не позволяет уловить микросколы и микротрещины режущего инструмента, характеризующие начало затупления инструмента.
Микросколы и микротрещины режущего инструмента характеризуются появлением всплесков на кривых виброакустического и силового сигналов. Крутизна этих всплесков определяется значениями dА/dt и dР/dt. Контролируя, кроме амплитудных значений еще и приращения сигналов, появляется возможность зафиксировать момент начала затупления режущего инструмента, а также возможность контролировать в целом процесс затупления с большой точностью.
Достижение какого-либо из четырех параметров своего порогового значения говорит о затуплении режущего инструмента.
Контроль приращений (ускорений) виброакустического и силового сигналов осуществляется также по двум абсолютно симметричным каналам - виброакустическому и силовому.
В первом блоке определения экстремума осуществляется выделение и запоминание максимального ускорения виброакустического сигнала. Величина максимального ускорения с выхода первого блока определения экстремума поступает на вход первого блока сравнения, на второй вход которого поступает с выхода первого блока определения экстремума сигнал текущих значений ускорений виброакустического сигнала. В первом блоке сравнения выделяется разность обоих сигналов, затем этот разностный сигнал поступает на вход второго компаратора (компаратор уровня), уровень которого задан таким, что при превышении величины текущего значения ускорения виброакустического сигнала величины максимального значения приращения компаратор выдает сигнал, который поступает на вход элемента И (пятый элемент И), на второй вход которого поступает сигнал с четвертого компаратора (компаратор уровня) силовой цепи. На вход данного компаратора поступает сигнал с блока сравнения (третий блок сравнения), который сравнивает сигналы текущих значений ускорений силового сигнала и значение максимального ускорения силового сигнала, поступающего на данный блок сравнения с выходов второго блока определения экстремума. При достижении текущих значений ускорений виброакустического и силового сигналов максимальных значений, запомненных в блоках определения экстремумов, пятый элемент И выдает сигнал, поступающий на вход элемента ИЛИ. Таким образом, устройство позволяет контролировать значения ускорений виброакустического и силового сигналов, по которым можно определить микросколы, микротрещины и т. д., а также определить износ инструмента. Износ инструмента характеризуется одновременным ростом уровня силового и падением уровня виброакустического сигналов (ускорение виброакустического сигнала становится отрица- тельным). Определение износа осуществляется следующим образом.
Сигнал текущих значений ускорений виброакустического сигнала с выхода первого блока определения экстремума поступает одновременно на вход третьего усилителя и первого пикового детектора, с выходов которых сигналы поступают на входы второго блока сравнения, где сигнал текущих значений (с ускорителя) сравнивается с начальным значением (с пикового детектора). С выхода второго блока сравнения сигнал поступает на вход третьего компаратора. Уровень данного компаратора устанавливается эмпирически в зависимости от типа станка и пары инструмент-деталь. Сигнал с выхода третьего компаратора поступает на вход элемента И (первый элемент И), на второй вход которого поступает сигнал с четвертого компаратора. При этом третий компаратор - компаратор нижнего уровня, а четвертый компаратор - компаратор верхнего уровня. В силовой цепи на вход четвертого компаратора поступает сигнал с четвертого блока сравнения, который сравнивает текущие значения ускорений силового сигнала, поступающие с четвертого усилителя, с их начальными значениями, поступающими со второго пикового детектора. На входы четвертого усилителя и второго пикового детектора одновременно поступает сигнал текущих значений ускорений силового сигнала с выхода второго блока определения экстремума. В момент, когда текущие значения ускорений виброакустического сигнала становится меньше опорного значения, а текущие значения силового сигнала становятся больше опорного значения, первый элемент И выдает сигнал, поступающий на вход элемента ИЛИ, свидетельствующий об износе инструмента.
В отличие от известного устройства, в данном устройстве масштабирование сигналов осуществляется в процессе врезания до момента достижения сигналами первых экстремумов, что позволяет точно установить порог срабатывания устройства и тем самым повысить точность определения момента затупления режущего инструмента.
Таким образом, предлагаемое устройство обеспечивает по сравнению с известным большую точность определения момента затупления режущего инструмента, т. к. во-первых, работа станка осуществляется на оптимальной скорости, которая с помощью данного устройства определяется для конкретной пары инструмент-деталь, во-вторых, предлагаемое устройство обеспечивает определение появления микросколов, микротрещин, наездов, зарезов и т. д., в-третьих, предлагаемое устройство позволяет точно определить момент износа инструмента, что позволяет сделать вывод о соответствии предлагаемого технического решения критерию изобретения "положительный эффект".
Сравнение заявляемого решения с другими в области науки и техники не позволило выявить в них признаки, отличающие заявляемое техническое решение от известного, что позволяет сделать вывод о его соответствии критерию изобретения "сущест- венные отличия".
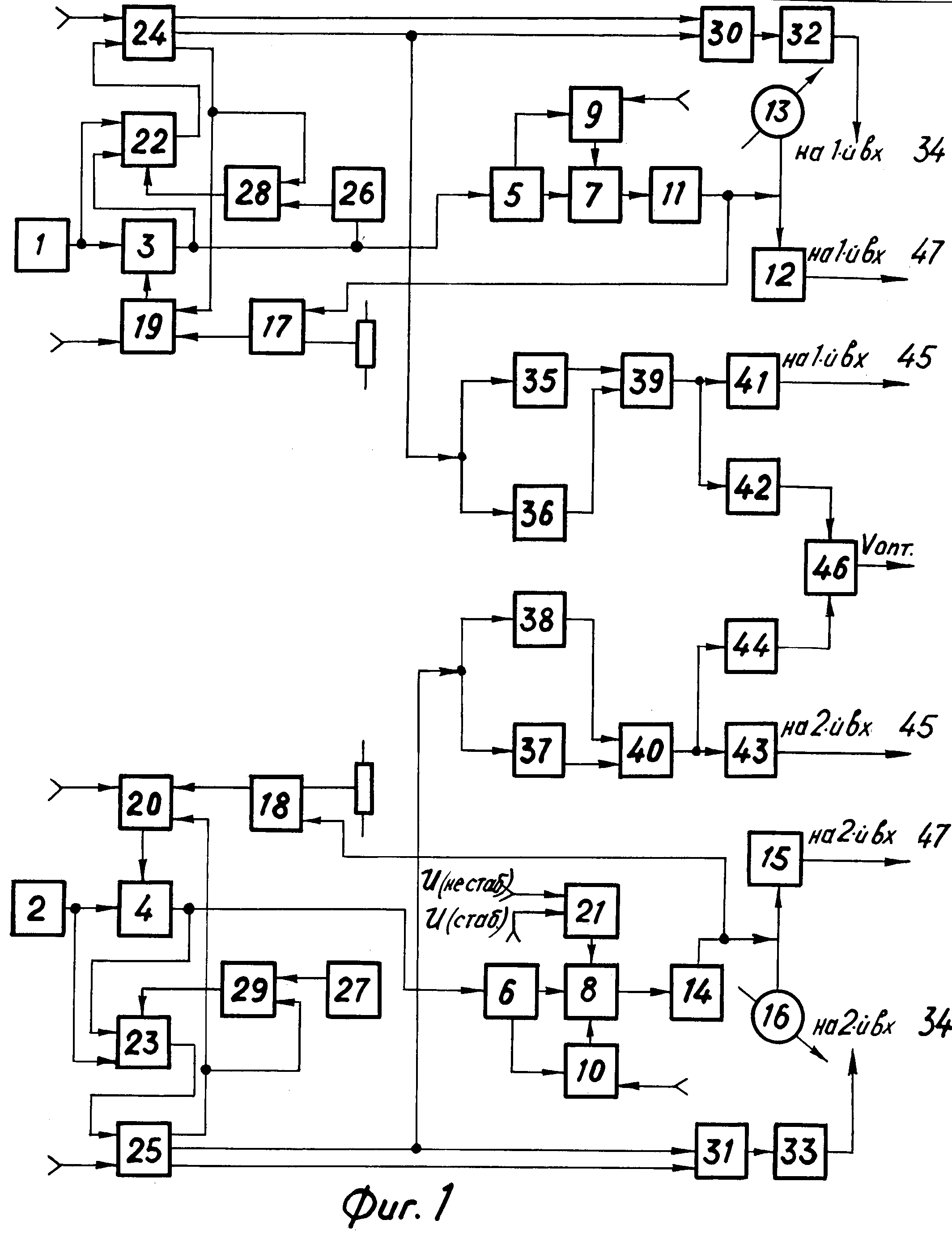
На фиг. 1-2 изображена функциональная схема предлагаемого устройства; на фиг. 3 - функциональная схема блока определения экстремума.
Устройство определения момента затупления режущего инструмента содержит виброакустический датчик 1 и силовой датчик 2, соединенные с первыми входами соответственно элемента АРУ 3 и элемента АРУ 4. Выход элемента АРУ 3 соединен со входом амплитудного детектора 5, выход элемента АРУ 4 - с входом амплитудного детектора 6. Первый выход амплитудного детектора 5 соединен с первым входом сумматора 7, первый выход амплитудного детектора 6 - с первым входом сумматора 8. Второй выход амплитудного детектора 5 подключен к первому входу элемента памяти 9, второй выход амплитудного детектора 6 - к первому входу элемента памяти 10. Элементы памяти 9 и 10 имеют управляющие входы, которые обнуляются от внешнего устройства. Выход сумматора 7 через усилитель 11 с регулируемым коэффициентом усиления подключен к входу компаратора 12 верхнего уровня и к индикатору 13. Выход сумматора 8 через усилитель 14 с регулируемым коэффициентом усиления подключен к входу компаратора 15 верхнего уровня и к индикатору 16. Выход усилителя 11 подключен к первому входу сравнивающего усилителя 17, а выход усилителя 14 - к первому входу сравнивающего усилителя 18. Вторые входы сравнивающих усилителей 17 и 18 соединены с регулятором смещения. Выход сравнивающего усилителя 17 соединен с первым входом элемента памяти 19, выход которого соединен с входом элемента АРУ 3. Выход сравнивающего усилителя 18 соединен с первым входом элемента памяти 20, выход которого соединен со вторым входом элемента АРУ 4. Элементы памяти 19 и 20 имеют управляющие вторые входы, которые обнуляются от внешнего устройства. Первый вход сравнивающего усилителя 21 соединен с нестабилизированным, а второй - со стабилизированным источником питания двумя независимыми связями. Выход сравнивающего усилителя 21 соединен с входом сумматора 8.
Виброакустический датчик 1 подключен к первому входу ключа 22, а силовой датчик 2 - к первому входу ключа 23. Второй вход ключа 22 подключен к выходу элемента АРУ 3, а второй вход ключа 23 - к выходу элемента АРУ 4. Выход первого ключа 22 подключен к первому входу блока 24 определения экстремума, выход второго ключа 23 подключен к первому входу блока 25 определения экстремума. Вторые входы блоков 24 и 25 являются управляющими. Первые выходы блоков 24 и 25 подключены к управляющим входам соответственно элемента памяти 19 и элемента памяти 20. Выход элемента АРУ 3 подключен к входу компаратора 26 уровня, выход элемента АРУ 4 - ко входу компаратора 27 уровня. Выходы компараторов 26 и 27 соединены с первыми входами соответственно элемента И 28 и элемента И 29. Вторые входы элементов И 28 и 29 соединены с первыми выходами соответственно блока 24 и блока 25 определения экстремума. Выходы элементов И 28 и 29 подключены к управляющим входам соответственно ключа 22 и ключа 23. Второй и третий выходы блока 24 подключены к первому и второму входам блока 30 сравнения, а второй и третий выходы блока 25 - к первому и второму входам блока 31 сравнения. Выходы блоков 30 и 31 сравнения подключены ко входам компаратора 32 уровня и компаратора 33 уровня. Выходы компараторов 32 и 33 подключены соответственно к первому и второму входам элемента И 34. Третий выход блока 24 подключен одновременно к входам усилителя 35 и пикового детектора 36, а третий выход блока 25 - одновременно к входам усилителя 37 и пикового детектора 38. Выходы усилителя 35 и пикового детектора 36 подключены соответственно к первому и второму входам блока 39 сравнения, а выходы усилителя 37 и пикового детектора 38 - к первому и второму входам блока 40 сравнения. Выход блока 39 сравнения подключен к входу компаратора 41 нижнего уровня и к входу компаратора 42 "≅ 0". Выход блока 40 сравнения подключен к входу компаратора 43 верхнего уровня к входу компаратора 44 ">0", выходы компаратора 41 и компаратора 43 подключены к первому и второму входам элемента И 45, а выходы компаратора 42 и компаратора 44 к первому и второму входам элемента И 46 (по появлению сигнала на выходе элемента И 46 судят о достижении оптимальной скорости резания). Выходы компаратора 12 верхнего уровня и компаратора 15 верхнего уровня подключены к входам первого элемента ИЛИ 47, выход элемента И 45 - к третьему входу элемента ИЛИ 47, выход элемента И 34 - к четвертому входу элемента ИЛИ 47. Выход элемента ИЛИ 47 соединен с механизмом замены инструмента и в случае аварийного выхода из строя инструмента дает разрешение на его замену.
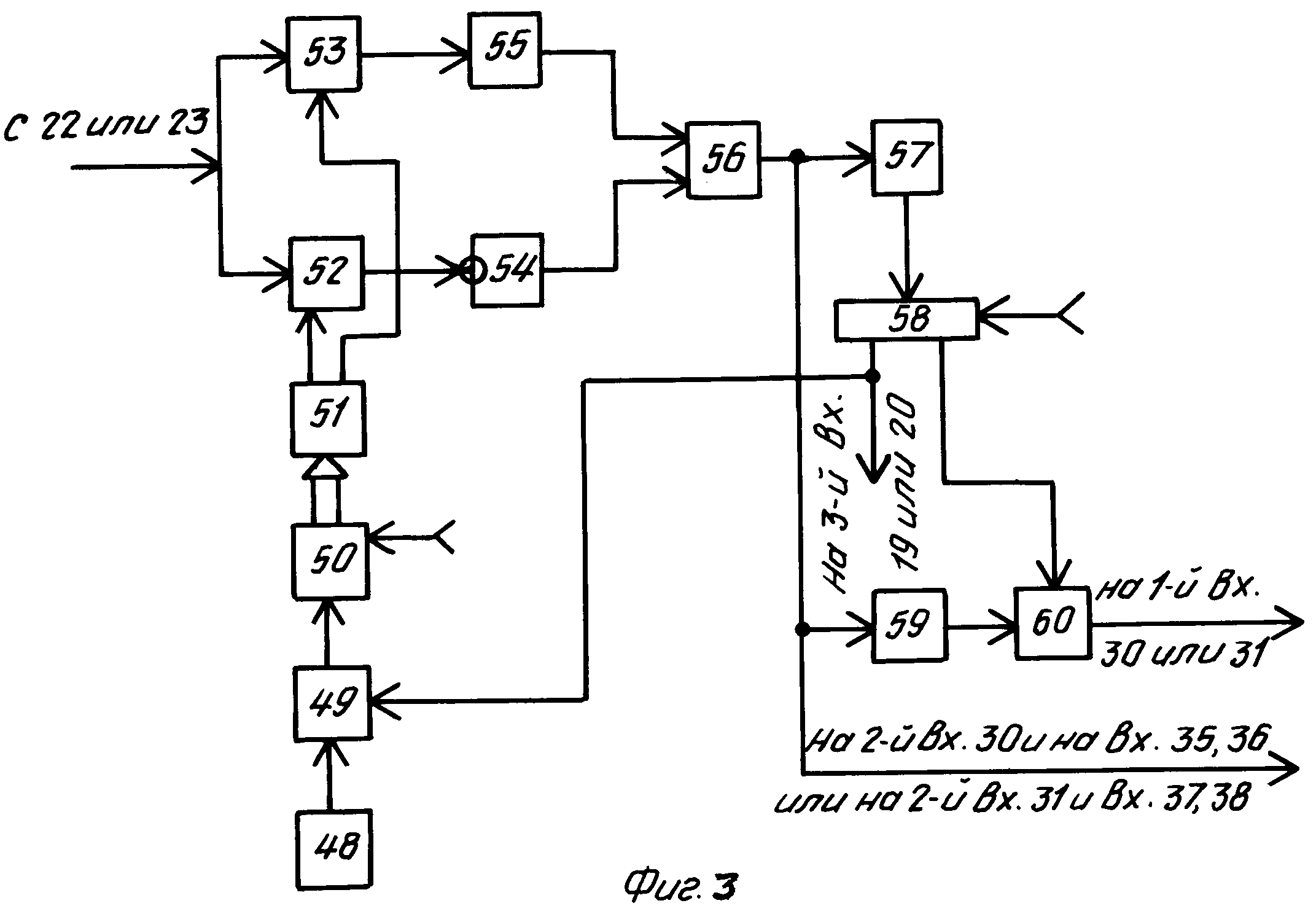
Блок определения экстремума содержит генератор 48 импульсов, выход которого соединен с входом ключа 49, выход которого подключен к первому входу счетчика 50, второй вход которого является управляющим с возможностью обнуления от внешнего устройства. С выходной шины счетчика 50 сигнал, разделенный по уровням, поступает на вход дешифратора 51, выходы которого соединены с управляющими входами элементов памяти 52 и 53, на вторые входы которых одновременно поступает сигнал с выхода ключа (в блоке 24 - со второго выхода ключа 22, а в блоке 25 - со второго выхода ключа 23). Выход элемента 53 памяти соединен с входом усилителя 55, а выход элемента 52 памяти - с инвертирующим входом усилителя 54. Выходы усилителей 54 и 55 соединены соответственно с первым и вторым входами блока 56 сравнения, выход которого соединен с входом компаратора 57 "0". Выход компаратора 57 подключен к первому входу триггера 58, второй вход которого является управляющим и обнуляется от внешнего устройства (управляющий вход триггера 58 и является управляющим входом блока определения экстремума). Текущие значения ускорений сигналов снимаются с выхода блока 56 сравнения (выход блока 56 сравнения является третьим выходом блоков определения экстремума). Значения максимального ускорения сигнала снимают с выхода элемента памяти 60, сигнал на первый вход которого поступает с выхода пикового детектора 59, на вход которого поступает сигнал с выхода блока 56 сравнения. На второй вход элемента памяти 60 поступает сигнал с первого выхода триггера 58. Второй выход триггера подключен ко второму управляющему входу ключа 49, кроме того, второй выход триггера является первым выходом в блоках определения экстремума, который соединен с третьим управляющим входом элементов памяти 19 и 20. Выход элемента памяти 60 является вторым выходом в блоках определения экстремума.
В процессе работы устройства неоднократно выполняется операция масштабирования в момент достижения сигналами первых экстремумов.
Масштабирование виброакустического сигнала. Сигнал с датчика 1 поступает одновременно на первый вход элемента АРУ 3 и на первый вход ключа 22, и через нормально замкнутые контакты которого - на первый вход блока 24 определения экстремума. В момент достижения виброакустическим сигналом первого экстремума при врезании с первого выхода блока 24 сигнал поступает на управляющий вход элемента памяти 19, в котором происходит фиксирование (запоминание) уровня информационного сигнала и переводят этот элемент памяти в режим "хранение". На первый вход элемента памяти 19 поступает информационный сигнал с выхода сравнивающего усилителя 17, первый вход которого соединен с выходом усилителя 11. На второй вход подается дискретный сигнал с ручного или автоматического регулятора. Дискретный сигнал устанавливается в соответствии с управляющей программой на стойке ЧПУ, пропорционально сигналу реакции режущего инструмента. На начальном этапе элемент памяти 19 находится в режиме "выборка".
С выхода элемента памяти 19 сигнал поступает на управляющий вход элемента АРУ 3. Управляющий сигнал с первого выхода блока 24 поступает также на второй вход элемента И 28, на первый вход которого поступает через компаратор 2 уровня сигнал с выхода элемента АРУ 3. Уровень компаратора 26 устанавливается соответствующим предельной величине масштабирования, задаваемого элементом АРУ 3. С выхода элемента И 28 сигнал поступает на управляющий вход ключа 22, при этом нормально замкнутые контакты ключа 22, которые подключали первый вход ключа 22 и вход блока 24, размыкаются и подключают второй вход ключа 22 с первым входом блока 24. Таким образом, информационный сигнал с датчика 1 переводится на выход элемента АРУ 3, и далее устройство работает на промасштабированном сигнале. Аналогично осуществляется операция масштабирования силового сигнала. Сигнал с выхода силового датчика 2 поступает одновременно на вход элемента АРУ 4 и на первый вход ключа 23, и через нормально замкнутые контакты которого - на первый вход второго блока 25. В момент достижения силовым сигналом первого экстремума при врезании с первого выхода блока 25 сигнала поступает на управляющий вход элемента памяти 20, в котором происходит фиксирование (запоминание) уровня информационного сигнала. На первый вход элемента памяти 20 поступает сигнал с выхода сравнивающего усилителя 18, первый вход которого соединен с выходом усилителя 14. На второй вход подается дискретный сигнал с ручного или автоматического регулятора. С выхода элемента памяти 20 сигнал поступает на второй вход элемента АРУ 4. Информационный сигнал с выхода блока 25 поступает также на второй вход элемента И 29, на первый вход которого поступает через компаратор 27 уровня сигнал с выхода элемента АРУ 4. С выхода элемента И 29 сигнал поступает на управляющий вход ключа 23, при этом контакты ключа 23, которые подключали первый вход ключа 23 с первым входом блока 25, размыкаются и переключаются, подсоединяя к первому входу блока 25 второй вход ключа 23.
Определение оптимальной скорости резания осуществляют следующим образом.
Сигнал с третьего выхода блока 24 (выход текущих значений ускорений виброакустического сигнала) поступает одновременно на усилитель 35 и пиковый детектор 36, с выхода которых - на вход блока 39 сравнения, где происходит сравнение между начальными значениями ускорений виброакустического сигнала с выхода пикового детектора 36 и их текущими значениями с выхода усилителя 35. С выхода блока 39 сравнения разностный сигнал поступает на вход компаратора 42. С третьего выхода блока 25 сигнал поступает одновременно на усилитель 37 и пиковый детектор 38, с выхода которых - на вход блока 40 сравнения, а с выхода блока 40 - на вход компаратора 44. Как только приращение уровня ускорения виброакустического сигнала станет равным или меньше 0 и одновременно приращение уровня ускорения силового сигнала станет возрастать, компараторы 42 и 44 выдают сигнал на элемент И 46. При одновременном присутствии сигналов на обоих входах элемента И 46 последний выдает сигнал, свидетельствующий о достижении оптимальной скорости резания, которая фиксируется с помощью индикатора, установленного на станке. По завершении процесса определения оптимальной скорости резания осуществляют сброс информации (установка нуля) в блоках 24 и 25 и в элементах памяти 19 и 20. Сброс информации в этих блоках осуществляют с помощью их управляющих входов. После процесса определения оптимальной скорости резания осуществляют процесс врезания при скорости, соответствующей оптимальной, и проводят второе масштабирование сигналов в момент достижения сигналами первых экстремумов. Затем останавливают подачу, осуществляют сброс информации в блоках 24 и 25, сохраняя при этом информацию в элементах памяти 19 и 20. После этого проводят повторное врезание при оптимальной скорости и начинают процесс обработки детали. Остановка подачи после операции масштабирования при врезании на оптимальной скорости и сброс после этого информации с блоков 24 и 25 перед процессом обработки необходим для того, чтобы в процессе обработки блоки 24 и 25 выделяли ускорения промасштабированного сигнала.
Далее в процессе обработки устройство работает следующим образом.
Промасштабированный сигнал виброакустических колебаний с выхода элемента АРУ 3 поступает на амплитудный детектор 5, который отслеживает амплитуду входного сигнала. С первого выхода амплитудного детектора 5 текущие значения виброакустического сигнала поступают на первый вход сумматора 7. Со второго выхода детектора 5 сигнал поступает на первый вход элемента памяти 9, с выхода которого сигнал поступает на второй вход сумматора 7. В сумматоре 7 текущие значения виброакустического сигнала (с выхода амплитудного детектора 5) сравниваются с начальными (с выхода элемента памяти 9). В процессе врезания с помощью сумматора 7 и элемента памяти 9 происходит сглаживание пульсаций. Для этого элемент памяти 9, включение которого осуществляется через второй управляющий вход в момент врезания, работает в процессе врезания в режиме выборки. По завершении процесса врезания элемент памяти 9 через управляющий вход переводят в режим хранения информации. С выхода сумматора 7 разностный сигнал через усилитель 11 с регулируемым коэффициентом усиления поступает на индикатор 13 (чтобы контролировать процесс резания) и на вход компаратора 12 верхнего уровня. Уровень этого компаратора задается на основании эмпирических данных, например на 25-30% выше начального. С выхода компаратора 12 сигнал поступает на первый вход элемента ИЛИ 47, с выхода которого поступает команда на механизм замены инструмента.
Аналогичным образом промасштабированный сигнал с выхода датчика 2 поступает на выход элемента АРУ 4 и далее на амплитудный детектор 6, который отслеживает амплитуду входного сигнала. С первого выхода амплитудного детектора 6 текущие значения силового сигнала поступают на первый вход сумматора 8, со второго выхода детектора 6 - на первый вход элемента памяти 10, с выхода которого - на второй вход сумматора 8. Элемент памяти 10 аналогично элементу памяти 9 через управляющий вход включается в момент врезания в работает в режиме выборки. По завершении процесса врезания элемент памяти 10 переводится в режим "хранение". Сумматор 8 вычисляет разность между текущим сигналом с детектора 6, постоянной величиной, зафиксированной в элементе памяти 10, и величиной, полученной от изменения напряжения силовой цепи по отношению к опорному через сравнивающий усилитель 21, результирующий сигнал поступает на усилитель 14, с выхода которого - одновременно на индикатор 16 и на вход компаратора 15 верхнего уровня. С выхода компаратора 15 сигнал поступает на второй вход элемента ИЛИ 47. Таким образом осуществляется контроль уровня силового и виброакустического сигналов.
Контроль уровня ускорений сигналов осуществляется следующим образом.
В блоке 24 происходит выделение и запоминание максимального уровня ускорения виброакустического сигнала на участке врезания. Данный сигнал со второго выхода блока 24 поступает на первый вход блока 30 сравнения, на второй вход которого поступает сигнал текущих значений ускорений виброакустического сигнала с третьего выхода блока 24. В блоке 30 сравнения выделяется разность обоих сигналов. Этот разностный сигнал поступает на компаратор 32 уровня, который срабатывает как только текущее значение ускорения виброакустического сигнала превысит уровень максимального значения ускорения этого сигнала. Компаратор 32 выдает сигнал на первый вход элемента И 34, который ждет результата контроля второго параметра (силового сигнала).
Сигнал на второй вход элемента И 34 приходит следующим образом. В блоке 25 происходит выделение и запоминание максимального ускорения силового сигнала на участке врезания. Данный сигнал со второго выхода блока 25 поступает на первый вход блока 31 сравнения, на второй вход которого поступает сигнал текущих значений ускорений силового сигнала с третьего выхода блока 25. В блоке 31 сравнения выделяется разность обоих сигналов. Этот разностный сигнал поступает на вход компаратора 33 уровня. Как только текущие значения ускорения силового сигнала превысят уровень максимального значения ускорения этого сигнала, компаратор 33 выдает сигнал на второй вход элемента И 34. Как только на оба входа элемента И 34 пришли оба сигнала, с его выхода поступает сигнал на вход элемента ИЛИ 47, с выхода которого поступает команда на замену инструмента.
Контроль износа инструмента осуществляется следующим образом.
С третьего выхода блока 24 сигнал текущих значений ускорений виброакустического сигнала поступает одновременно на вход усилителя 35 и пикового детектора 36, входы которых подключены соответственно к первому и второму входам блока 39 сравнения, где выделяется разность между начальным значением (с выхода пикового детектора) и текущим значением (с выхода усилителя) ускорений сигнала. С выхода блока 39 сигнал поступает на вход компаратора 41 нижнего уровня, уровень которого устанавливается эмпирически в зависимости от типа станка и пары инструмент-деталь. Как только разностный сигнал на выходе блока 39 сравнения понизится до уровня, установленного компаратором 41, последний выдает сигнал на первый вход элемента И 46, который ждет появления сигнала на втором входе.
С третьего выхода блока 25 сигнал текущих значений ускорений силового сигнала поступает одновременно на вход усилителя 37 и пикового детектора 38, выходы которых подключены соответственно к первому и второму входам блока 40 сравнения. С выхода блока 40 сигнал поступает на вход компаратора 43 верхнего уровня, уровень которого устанавливается эмпирически. Как только сигнал с выхода блока сравнения превысит уровень, установленный компаратором 43, последний выдает сигнал на второй вход элемента И 45. Как только на оба входа элемента И 45 поступили сигналы, он выдает сигнал на вход элемента ИЛ И 47, с выхода которого поступает команда на замену инструмента.
Блок определения экстремума работает следующим образом.
Генератор 48 импульсов вырабатывает сигнал с заданной частотой следования импульсов, с выхода генератора 48 испульсный сигнал поступает на вход ключа 49, с выхода которого сигнал поступает на счетчик 50, где происходит разделение сигнала по уровням, и далее - на дешифратор 51. С выходов дешифратора 51 сигналы одного уровня поступают на управляющий вход элемента памяти 52, а сигналы другого уровня - на управляющий вход элемента памяти 53. На первые (информационные) входы элементов памяти 52 и 53 поступает сигнал со второго выхода ключа (22, 23). При поступлении управляющего импульса в элементах памяти 52 и 53 происходит запись информации. Сигнал с выхода элемента памяти 53 поступает на вход усилителя 55, а с выхода элемента памяти 52 - на инвертирующий вход усилителя 54. С выходов усилителей 55 и 54 сигналы поступают на входы блока 56 сравнения. С выхода блока 56 сигнал поступает на вход компаратора 57 "нуля", т. к. необходимо выделить момент первого экстремума, который определяется в момент, когда разница между двумя последовательными приращениями сигнала равно нулю (т. е. должна быть равна нулю разница между сигналами с выхода усилителя 55 и усилителя 54). Как только с выхода блока сравнения на вход компаратора 57 поступает сигнал, равный нулю, с выхода компаратора 57 поступает сигнал на первый вход триггера 58, второй вход которого является управляющим и, соответственно, управляющим входом блока определения экстремума и ключа 49. В момент достижения сигналом первого экстремума с первого выхода триггера 58 одновременно поступает команда на третий управляющий вход элемента памяти 19, 20 и на управляющий вход ключа 49 с целью отключения генератора 48 импульсов. Данный выход триггера 58 является первым выходом в блоке определения экстремума.
Выделение максимального ускорения сигнала и отслеживание текущих значений ускорений сигнала осуществляется следующим образом.
Текущие значения ускорений снимаются с выхода блока 56 сравнения и поступают на второй вход блока 30 сравнения (при контроле виброакустического сигнала) и на второй вход блока 31 сравнения (при контроле силового сигнала). Выход блока 56 сравнения является третьим выходом блока 24, 25 определения экстремума.
Максимальное значение ускорения сигнала на первый вход блока сравнения 30 или 31 поступает с выхода элемента памяти 60, на первый информационный вход которого сигнал поступает с выхода пикового детектора 59, где происходит выбор максимального значения ускорения сигнала и его временное хранение (до поступления управляющего сигнала на элемент памяти 60). Управляющий сигнал на элемент памяти 60 поступает на его второй вход со второго выхода триггера 58 в момент достижения сигналом первого экстремума. На вход пикового детектора 59 сигнал поступает с выхода блока 56 сравнения. Выход элемента памяти 60 является вторым выходом блока определения экстремума, соединенным с первым входом блока сравнения 30, 31.
По окончании процесса врезания осуществляется сброс информации с триггера 58 и со счетчика 60 через управляющие входы.
Использование предлагаемого устройства позволяет по сравнению с известным повысить точность определения момента затупления режущего инструмента за счет автоматического выбора и поддержания оптимального режима обработки, а также за счет получения более полной и достоверной информации о стойкостных параметрах режущего инструмента.
Реферат
Использование: в автоматизации машиностроения. Сущность изобретения: обработка детали режущим инструментом осуществляется при оптимальных технологических параметрах. В процессе обработки контролируют значения виброакустического и силового сигналов и их приращения за отрезок времени. Об износе инструмента судят по достижению значений виброакустического и силового сигналов и их приращений своих пороговых значений. Пороговые значения виброакустического и силового сигналов и их приращений определяют и устанавливают в процессе врезания до момента достижения сигналами первых экстремумов. Устройство для осуществления способа содержит виброакустический датчик, силовой датчик, два элемента автоматического регулирования усиления, два амплитудных детектора, два сумматора, четыре элемента памяти, семь усилителей, два индикатора, три компаратора верхнего уровня, два ключа, два блока определения экстремума, четыре блока сравнения, десять компараторов, два пиковых детектора, пять элементов И, элемент ИЛИ. 3 ил.
Комментарии