Способ и устройство для управления приводной системой складывающихся законцовок и ее мониторинга и материальный компьютерочитаемый носитель для хранения - RU2747392C2
Код документа: RU2747392C2
Чертежи













Описание
РОДСТВЕННЫЕ ЗАЯВКИ
[001] Настоящее изобретение включает в себя объект изобретения, относящийся к патентам США 9, 290, 260 с датой подачи 10 сентября 2013 года, 9, 296, 469 с датой подачи 10 августа 2013 года и 9, 296, 472 с датой подачи 17 октября 2013 года, все из которых включены в настоящее описание посредством ссылки во всей их полноте.
ОБЛАСТЬ ТЕХНИКИ
[002] Настоящее изобретение в целом относится к летательным аппаратам, а в частности - к способам и устройствам для управления приводной системой складывающихся законцовок и ее мониторинга.
УРОВЕНЬ ТЕХНИКИ
[003] В последние годы производители коммерческих летательных аппаратов уделяют все больше внимания проектированию и разработке летательных аппаратов, имеющих увеличенную топливную эффективность. Увеличение топливной эффективности приводит к экономии затрат в течение срока службы летательных аппаратов, поскольку цены на топливо продолжают повышаться. Топливная эффективность летательного аппарата обычно зависит от аэродинамического сопротивления и расхода топлива. Аэродинамическое сопротивление и расход топлива летательного аппарата могут быть уменьшены с увеличением относительного удлинения крыльев летательного аппарата. В воздухоплавании длинное узкое крыло имеет большое относительное удлинение по сравнению с коротким широким крылом, которое имеет небольшое относительное удлинение. Таким образом, увеличение размаха крыльев летательного аппарата является эффективным способом увеличения относительного удлинения.
[004] Увеличение размаха крыльев летательного аппарата может приводить к уменьшению аэродинамического сопротивления и расхода топлива летательного аппарата.
Однако увеличение размаха крыльев летательного аппарата до таких значений длины, которые превосходят размах крыльев применяемых в настоящее время летательных аппаратов, может создать трудности в обычных аэропортах, имеющих ограниченное пространство для посадочных площадок и рулежных дорожек. Многие аэропорты могут принимать летательные аппараты, размах крыльев которых не превосходит обычной максимальной длины. Увеличение размаха крыльев за пределы обычной максимальной длины обеспечивает возможность уменьшения аэродинамического сопротивления и расхода топлива летательного аппарата, однако в ущерб безопасности посадки и/или маневрирования в аэропортах.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[005] Приведенное в качестве примера устройство, раскрытое в настоящем документе, включает в себя модуль сбора для получения информации об этапе полета летательного аппарата. Приведенное в качестве примера устройство также включает в себя
модуль работы с последовательностью и управления для:
- вычисления первого положения узла складывающихся законцовок, функционально соединенного с крылом летательного аппарата,
- определения действий во время первого и второго этапов для их последовательного выполнения с перемещением узла складывающихся законцовок,
- определения состояния компонента узла складывающихся законцовок на основании показания датчика, и
- управления перемещением узла складывающихся законцовок в соответствии с указанными действиями и на основании указанного состояния.
[006] Приведенный в качестве примера способ, раскрытый в настоящем документе, включает:
- получение информации об этапе полета летательного аппарата, вычисление первого положения узла складывающихся законцовок, функционально соединенного с крылом летательного аппарата,
- определение действий во время первого и второго этапов для их последовательного выполнения с перемещением узла складывающихся законцовок,
- определение состояния компонента узла складывающихся законцовок на основании показания датчика, и
- управление перемещением узла складывающихся законцовок в соответствии с указанными действиями и на основании указанного состояния.
[007] Приведенный в качестве примера материальный компьютерочитаемый носитель для хранения включает в себя инструкции, которые при их исполнении побуждают машину по меньшей мере:
- получать информацию об этапе полета летательного аппарата,
- вычислять первое положение узла складывающихся законцовок, функционально соединенного с крылом летательного аппарата,
- определять действия во время первого и второго этапов для их последовательного выполнения с перемещением узла складывающихся законцовок,
- определять состояние компонента узла складывающихся законцовок на основании показания датчика, и
- управлять перемещением узла складывающихся законцовок в соответствии с указанными действиями и на основании указанного состояния.
[008] Один вариант реализации изобретения включает в себя устройство, которое содержит модуль сбора для получения информации об этапе полета летательного аппарата и модуль работы с последовательностью и управления для:
- вычисления первого положения узла складывающихся законцовок, функционально соединенного с крылом летательного аппарата;
- определения действий во время первого и второго этапов для их последовательного выполнения с перемещением узла складывающихся законцовок;
- определения состояния компонента узла складывающихся законцовок на основании показания датчика; и
- управления перемещением узла складывающихся законцовок в соответствии с указанными действиями и на основании указанного состояния. Вычисление первого положения может быть обеспечено на основании указанной информации об этапе полета. Устройство также может включать в себя модуль мониторинга и оповещения для:
- мониторинга указанных действий и состояния;
- выработки предупреждения на основании указанных действий и состояния и
- передачи в пользовательский интерфейс информации, которая включает в себя указанные действия, указанные состояние и предупреждение.
Состояние может представлять собой рабочее состояние компонента. Модуль работы с последовательностью и управления может включать в себя контроллер для управления узлом складывающихся законцовок для перемещения из второго положения в первое положение, когда состояние компонента является рабочим. Модуль работы с последовательностью и управления может быть использован для вычисления третьего положения, а контроллер выполнен с возможностью управления узлом складывающихся законцовок для перемещения из второго положения в третье положение, когда рабочим состоянием компонента является отсутствие реагирования.
[009] Другой вариант реализации изобретения включает в себя способ, который может включать:
- получение информации об этапе полета летательного аппарата;
- вычисление первого положения узла складывающихся законцовок, функционально соединенного с крылом летательного аппарата;
- определение действий во время первого и второго этапов для их последовательного выполнения с перемещением узла складывающихся законцовок;
- определение состояния компонента узла складывающихся законцовок на основании показания датчика; и
- управление перемещением узла складывающихся законцовок в соответствии с указанными действиями и на основании указанного состояния, посредством исполнения инструкции процессором.
Возможность вычисления первого положения обеспечена на основании указанной информации об этапе полета. Способ также может включать в себя:
- мониторинг указанных действий и состояния;
- выработку предупреждения на основании указанных действий и состояния и
- передачу в пользовательский интерфейс информации, которая включает в себя указанные действия, указанные состояние и предупреждение. Информация об этапе полета может включать в себя информацию о том, находится ли летательный аппарат в полете или
совершает перемещение по земной поверхности. Состояние может представлять собой рабочее состояние компонента. Способ может включать управление узлом складывающихся законцовок для перемещения из второго положения в первое положение при определении того, что компонент является рабочим. Способ может включать вычисление третьего положения узла складывающихся законцовок и управление узлом складывающихся законцовок для перемещения из второго положения в третье положение при определении того, что рабочим состоянием компонента является отсутствие реагирования.
[0010] Еще один вариант реализации изобретения включает в себя материальный компьютерочитаемый носитель для хранения, содержащий инструкции, которые при их исполнении побуждают машину по меньшей мере:
- получать информацию об этапе полета летательного аппарата;
- вычислять первое положение узла складывающихся законцовок, функционально соединенного с крылом летательного аппарата на основании указанной информации об этапе полета;
- определять действия во время первого и второго этапов для их последовательного выполнения с перемещением узла складывающихся законцовок;
- определять состояние компонента узла складывающихся законцовок на основании показания датчика; и
- управлять перемещением узла складывающихся законцовок в соответствии с указанными действиями и на основании указанного состояния.
Вычисление первого положения может быть обеспечено на основании указанной информации об этапе полета. Материальный компьютерочитаемый носитель для хранения также может включать в себя инструкции, которые при их исполнении побуждают машину:
- осуществлять мониторинг указанных действий и состояния;
- вырабатывать предупреждение на основании указанных действий и состояния и
- передавать в пользовательский интерфейс информацию, которая включает в себя указанные действия, указанные состояние и предупреждение.
Информация об этапе полета может включать в себя информацию о том, находится ли летательный аппарат в полете или совершает перемещение по земной поверхности. Состояние может представлять собой рабочее состояние компонента. Материальный компьютерочитаемый носитель для хранения по п. 18, также содержащий инструкции, которые при их исполнении побуждают указанную машину управлять узлом складывающихся законцовок для перемещения из второго положения в первое положение, когда определено, что компонент является рабочим. Материальный компьютерочитаемый носитель для хранения также может включать в себя инструкции, которые при их исполнении побуждают указанную машину вычислять третье положение узла складывающихся законцовок и управлять узлом складывающихся законцовок для перемещения из второго положения в третье положение, когда определено, что рабочим состоянием компонента является отсутствие реагирования.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011 На ФИГ. 1 схематически показан летательный аппарат с узлом складывающихся законцовок, соединенных с обоими крыльями летательного аппарата.
[0012] На ФИГ. 2А и 2В показаны блок-схемы примера осуществления приведенного в качестве примера устройства модуля управления складывающимися законцовками.
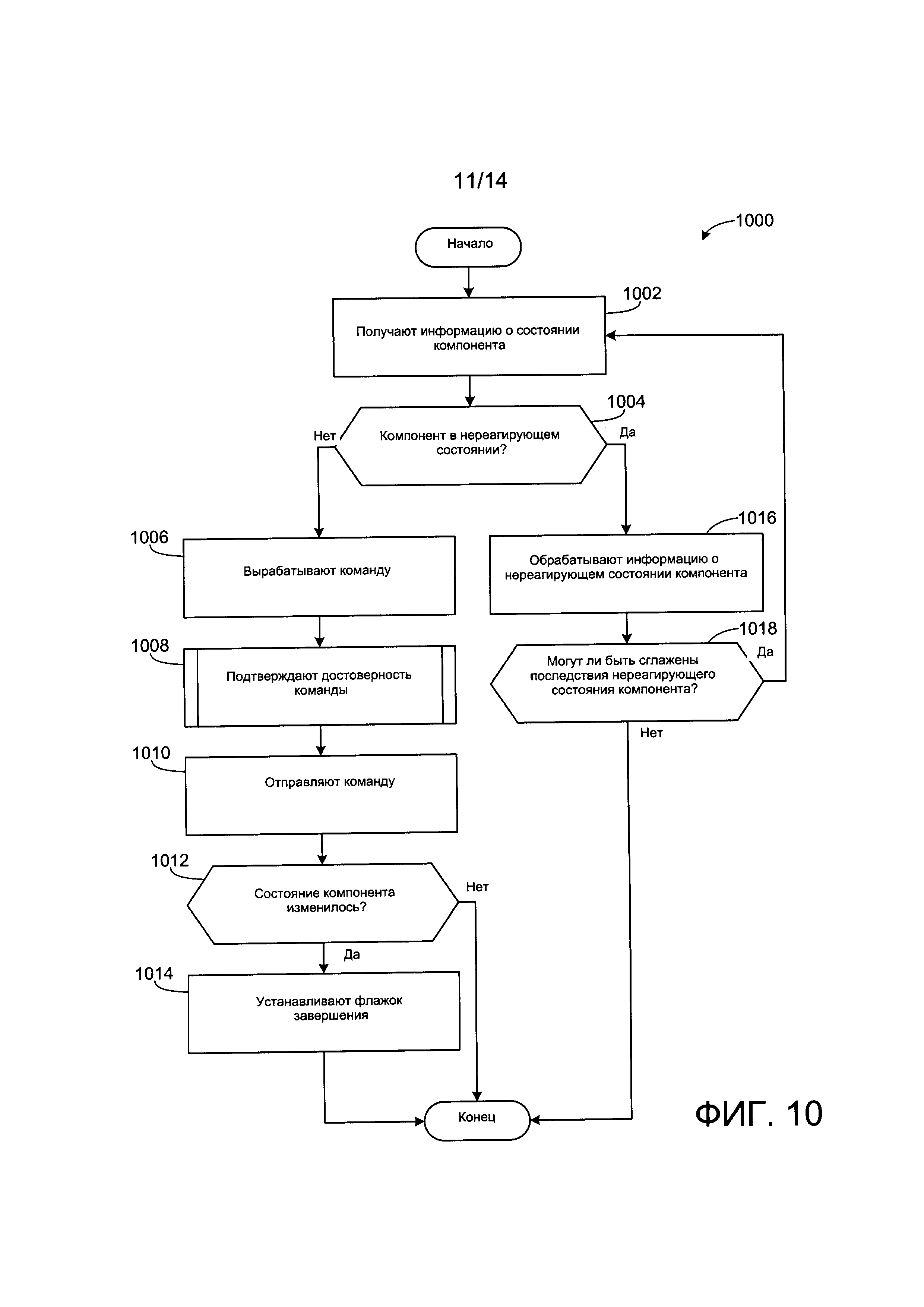
[0013] На ФИГ. 3-12 показаны структурные схемы приведенных в качестве примера способов, которые могут быть использованы для реализации приведенного в качестве примера устройства модуля управления складывающимися законцовками по ФИГ. 2А и 2В.
[0014] На ФИГ. 13 показана блок-схема приведенной в качестве примера процессорной платформы, выполненной с возможностью исполнения машиночитаемых инструкций для реализации способов по ФИГ. 3-12, и приведенного в качестве примера устройства модуля управления складывающимися законцовками по ФИГ. 2А и 2В.
[0015] Чертежи не обязательно выполнены в масштабе. Наоборот, для ясного показа слоев и областей толщина слоев на чертежах может быть увеличена. Там, где это возможно, будут использоваться одни и те же ссылочные номера на всем чертеже (на всех чертежах) и сопроводительном письменном описании для обозначения одних тех же или подобных частей. При использовании в настоящем документе термины "соединенный" и "функционально соединенный" определяются как связанные непосредственно или опосредованно (например, через одну или более промежуточных конструкций и/или один или более промежуточных слоев).
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0016] В последние годы производители коммерческих летательных аппаратов вкладывают средства в проектирование летательных аппаратов, с тем, чтобы повысить прибыльность операторов коммерческих авиакомпаний. Экономические соображения, лежащие в основе развития современных воздушных перевозок, привели к созданию крупных летательных аппаратов и/или обладающих большей топливной эффективностью. Крупные летательные аппараты могут перевозить большее количество пассажиров, что позволяет распределять общую стоимость каждого рейса на большее количество пассажиров. Крупные летательные аппараты также способны нести дополнительное топливо, которое может быть использовано для обеспечения их эксплуатирования на более продолжительных, более дорогих маршрутах полетов.
[0017] Крупные летательные аппараты при перемещении на данное расстояние могут потреблять больше топлива вследствие увеличения своего веса. Чтобы компенсировать увеличение веса летательного аппарата, на нем дополнительно могут быть использованы одна или более поверхностей управления полетом летательного аппарата (например, руль высоты, закрылок, горизонтальный стабилизатор, руль направления, предкрылок, вертикальный стабилизатор, крыло и т.д.), обеспечивающие уменьшение лобового сопротивления и/или увеличение подъемной силы. В некоторых примерах в полете управляют указанными одной или более поверхностями управления полетом летательного аппарата для улучшения аэродинамических свойств летательного аппарата. В некоторых случаях указанные одна или более поверхностей управления полетом летательного аппарата могут быть аэродинамических выполнены так, чтобы обеспечивать уменьшение лобового сопротивления и увеличение подъемной силы летательного аппарата.
[0018] Крылья летательного аппарата, например, могут быть выполнены так, чтобы обеспечивать уменьшение лобового сопротивления посредством регулировки относительного удлинения крыльев. В воздухоплавании относительное удлинение крыльев летательного аппарата представляет собой отношение размаха крыльев к средней хорде крыльев. Размах представляет собой расстояние от одной законцовки до другой законцовки. Размах измеряют по прямой линии от законцовки до законцовки независимо от формы или стреловидности крыла. Хорда представляет собой воображаемую прямую линию, соединяющую передний край и задний край крыла летательного аппарата. Длина хорды представляет собой расстояние между задней кромкой и точкой на переднем крае, где хорда пересекает передний край. Большинство крыльев летательного аппарата не являются прямоугольными, поэтому они имеют отличающуюся хорду и, соответственно, длину хорды в различных местоположениях по размаху крыла летательного аппарата. В некоторых примерах средняя хорда является средней геометрической хордой (СГХ), задаваемой как площадь крыла, деленная на размах крыла. В некоторых случаях средняя хорда является средней аэродинамической хордой (САХ), рассчитываемой с использованием интегральной суммы длин хорды по размаху крыла летательного аппарата.
[0019] Для увеличения относительного удлинения крыльев летательного аппарата может быть увеличен размах крыла, может быть уменьшена средняя хорда и/или выполнено то и другое. Увеличение размаха крыльев является эффективным способом увеличения относительного удлинения крыльев летательного аппарата и уменьшения лобового сопротивления и/или увеличения подъемной силы летательного аппарата. Однако увеличенный размах крыльев может создавать проблемы для существующих схем аэропортов. Например, летательный аппарат с увеличенным размахом крыльев может не помещаться в выделенное пространство возле выхода на посадку терминала аэропорта. Такие крылья летательного аппарата могут мешать другим летательным аппаратам и/или выходам на посадку при попытке разместить летательный аппарат возле назначенного выхода на посадку в терминале для летательных аппаратов.
[0020] Приведенные в качестве примера устройства складывающихся законцовок, раскрытые в настоящем документе, выполнены с возможностью складывания законцовок летательного аппарата, который имеет увеличенный размах крыльев. Приведенные в качестве примера устройства складывающихся законцовок могут быть использованы для перемещения законцовок летательного аппарата из выдвинутого положения (например, полетного положения, разложенного положения и т.д.) в сложенное положение. Например, выдвинутое положение может представлять собой положение, в котором законцовки летательного аппарата находятся на одном уровне с кривизной крыльев летательного аппарата. Сложенное положение может представлять собой положение, в котором законцовки летательного аппарата находятся под углом относительно горизонтальной оси крыльев летательного аппарата. Альтернативно, приведенные в качестве примера устройства складывающихся законцовок могут быть использованы для перемещения законцовок летательного аппарата в промежуточное положение между выдвинутым положением и сложенным положением. Приведенные в качестве примера устройства складывающихся законцовок могут включать в себя приводы, двигатели и датчики, обеспечивающие выдвижение и складывание законцовок летательного аппарата. Приводы и двигатели могут приводиться в действие электрически, гидравлически и/или пневматически. Датчики выполнены с возможностью мониторинга такой информации о компоненте, как, например, расход (например, расход гидравлической жидкости), давление (например, давление воздуха, гидравлическое давление и т.д.), температура (например, температура гидравлической жидкости) и т.д. Датчики также выполнены с возможностью мониторинга такой информации о состоянии компонента, как, например, положение компонента (например, положение линейного привода, положение механизма фиксации и т.д.), состояние двигателя (например, скорость двигателя больше нуля оборотов в минуту) и т.д.
[0021] Некоторые раскрытые приведенные в качестве примера устройства складывающихся законцовок, раскрытого в настоящем документе, выполнены с возможностью складывания законцовок летательного аппарата на основании системы фиксаторов и защелок. Приведенные в качестве примера устройства складывающихся законцовок могут включать в себя множество стопорных штифтов, зафиксированных в положении стопорения основными фиксаторами и вспомогательными фиксаторами. Каждый основной фиксатор механически предотвращает перемещение соответствующего вспомогательного фиксатора с удержанием вспомогательного фиксатора в положении фиксации, когда основной фиксатор не находится в положении фиксации. Вспомогательные фиксаторы соединены друг с другом для обуславливания их совместного перемещения в положения фиксации и из положений фиксации. Ограничитель стопорного штифта предотвращает перемещение стопорного штифта в положении стопорения. Ограничитель стопорного штифта перемещают, чтобы обеспечить стопорение после завершения складывания или раскладывания законцовки. Когда фиксаторы находятся в своих положениях фиксации, вспомогательные фиксаторы механически предотвращают перемещение основных фиксаторов из своих положений фиксации. Вспомогательные фиксаторы смещаются в свои положения фиксации посредством приводов (например, электрических приводов, гидравлических приводов, пневмоприводов и т.д.). В некоторых раскрытых примерах устройства складывающихся законцовок могут включать в себя один или более стопоров развертывания для поддержания законцовок в сложенном положении.
[0022] В целом, приведенные в качестве примера устройства складывающихся законцовок, раскрытые в настоящем документе, используют приведенный в качестве примера модуль управления складывающимися законцовками для мониторинга устройств складывающихся законцовок и управления устройствами складывающихся законцовок. Приведенный в качестве примера модуль управления складывающимися законцовками выполнен с возможностью получения информации датчиков и выполнения вычислений на основании информации от датчиков. В некоторых примерах модуль управления складывающимися законцовками определяет статус и/или состояния компонента приведенного в качестве примера устройства складывающихся законцовок. Например, модуль управления складывающимися законцовками выполнен с возможностью получения показания датчика положения и сравнения этого показания с заданной точкой положения для определения, являются ли один или более компонентов, относящихся к датчику положения (например, один или более компонентов являются нереагирующими) нерабочими или рабочими (например, один или более компонентов являются реагирующими, один или более компонентов являются функциональными и т.д.). Например, состояние компонента и/или системы может быть рабочим, нерабочим, реагирующим, нереагирующими и т.д. В некоторых примерах модуль управления складывающимися законцовками выполнен с возможностью определения, что входные данные (например, показание датчика, входные данные из кабины экипажа и т.д.) включают в себя информацию о нереагирующем состоянии. Например, входные данные могут включать в себя значение нулевого коэффициента, значение, находящееся вне диапазона допустимых значений для указанного значения, значение, которое не обновляется, когда это ожидается, и т.д.
[0023] Приведенный и описанный здесь в качестве примера модуль управления складывающимися законцовками может включать в себя дополнительное модульное устройство для реализации функций, относящихся к мониторингу приведенного в качестве примера устройства складывающихся законцовок и управлению им. Например, модуль управления складывающимися законцовками может включать в себя один или более подмодулей для выполнения функций мониторинга и управления в отношении устройств складывающихся законцовок. Подмодули могут быть ответственными за отдельные задачи, такие как, например, получение информации (например, сетевой информации, информации датчиков и т.д.), определение состояния подкомпонента или подсистемы приведенного в качестве примера устройства складывающихся законцовок, выполнение проверки достоверности выходной команды и т.д. Подмодули могут быть ответственными за использование различных функций устройств складывающихся законцовок, таких как, например, приводная система устройств складывающихся законцовок, удаленный электронный блок, компонент (например, привод, двигатель, клапан и т.д.) и т.д. В некоторых примерах использование различных функций устройств складывающихся законцовок включает в себя изменение значения флажка. При использовании в настоящем документе флажок представляет собой переменную в компьютере и/или машиночитаемой инструкции, которой или которыми может быть выдано предупреждение в устройство складывающихся законцовок о состоянии функции, связанной с флажком.
[0024] Приведенный и описанный здесь в качестве примера модуль управления складывающимися законцовками выполнен с возможностью определения и/или выполнения одной или более последовательностей для автоматического (например, без ввода данных пользователем, без управления пользователем и т.д.) управления устройством складывающихся законцовок. В некоторых примерах модуль управления складывающимися законцовками выполнен с возможностью определения последовательности для нормальной работы для устройства складывающихся законцовок на основании состояния подкомпонентов и подсистем устройств складывающихся законцовок. Например, модуль управления складывающимися законцовками выполнен с возможностью определения последовательности для нормальной работы для перемещения устройства складывающихся законцовок из сложенного положения в выдвинутое положение. Последовательность для нормальной работы может быть основана на рабочем состоянии подкомпонентов и подсистем. В некоторых примерах модуль управления складывающимися законцовками выполнен с возможностью изменения и/или преждевременного завершения последовательности для нормальной работы на основании полученной информации о состоянии.
[0025] В некоторых случаях модуль управления складывающимися законцовками выполнен с возможностью определения и/или выполнения последовательности при отсутствии реагирования для автоматического (например, без ввода данных пользователем, без управления пользователем и т.д.) управления устройством складывающихся законцовок на основании состояния подкомпонентов и подсистем устройств складывающихся законцовок. Например, модуль управления складывающимися законцовками выполнен с возможностью определения последовательности при отсутствии реагирования для перемещения устройства складывающихся законцовок из сложенного положения в положение безопасного состояния. Последовательность при отсутствии реагирования может быть основана на состоянии отсутствия реагирования по меньшей мере одного из подкомпонентов и/или подсистем. В некоторых примерах модуль управления складывающимися законцовками выполнен с возможностью преждевременного завершения последовательности для нормальной работы и перехода к последовательности, исполняемой при отсутствии реагирования, на основании полученной информации о состоянии.
[0026] На ФИГ. 1 схематически показан летательный аппарат 100. Летательный аппарат 100 включает в себя крылья 102, 104, соединенные с фюзеляжем 106. С крыльями 102, 104 соединены двигатели 108, 110. Предкрылки 112, 114 и закрылки 116, 118 функционально соединены с крыльями 102, 104. Дополнительные поверхности управления летательного аппарата 100 включают в себя горизонтальные стабилизаторы 120, 122, функционально соединенные с рулями 124, 126 высоты, и вертикальный стабилизатор 128, соединенный с фюзеляжем 106.
[0027] В показанном примере по ФИГ. 1, крылья 102, 104 изображены имеющими неподвижные поверхности 130, 132 и подвижные поверхности 134, 136. Неподвижные поверхности 130, 132 могут быть внутренними частями крыльев 102, 104, которые могут быть прикреплены к фюзеляжу 106, а подвижные поверхности 134, 136 могут быть выполнены с возможностью перемещения относительно неподвижных поверхностей 130, 132. Например, неподвижная поверхность 130 может быть внутренней частью крыла 102, а подвижная поверхность 134 может быть выполнена с возможностью перемещения относительно неподвижной поверхности 130. Подвижные поверхности 134, 136 могут быть выполнены с возможностью перемещения относительно осей 138, 140. Например, подвижная поверхность 134 может быть выполнена с возможностью перемещения относительно оси 138.
[0028] В показанном примере по ФИГ. 1, подвижные поверхности 134, 136 могут называться подвижными, складными или складывающимися законцовками крыльев 102, 104. Например, подвижная поверхность 134 может представлять собой складывающуюся законцовку крыла 102. При использовании в настоящем документе складывающаяся законцовка является законцовкой, выполненной с возможностью перемещения относительно неподвижной поверхности крыла. Складывающиеся законцовки могут иметь разные углы, схемы движения, размеры и другие параметры, зависящие от компоновки летательного аппарата и/или его реализации, и/или применения.
[0029] В показанном примере по ФИГ. 1, подвижные поверхности 134, 136 изображены в сложенном положении. Подвижные поверхности 134, 136 выполнены с возможностью перемещения из выдвинутых положений 142, 144 в сложенные положения 146, 148. Выдвинутые положения 142, 144 могут представлять собой положения, в которых подвижные поверхности 134, 136 находятся под углом около нуля градусов относительно осей 138, 140. Например, подвижная поверхность 134 выполнена с возможностью перемещения из выдвинутого положения 142 в сложенное положение 146 в направлении 150. В другом примере подвижная поверхность 136 выполнена с возможностью перемещения из выдвинутого положения 144 в сложенное положение 148 в направлении 152. В некоторых случаях подвижные поверхности 134, 136 выполнены с возможностью перемещения из выдвинутых положений 142, 144 в промежуточные положения, при этом промежуточные положения находятся между выдвинутыми положениями 142, 144 и сложенными положениями 146, 148.
[0030] Летательный аппарат 100 по ФИГ. 1 является примером летательного аппарата, в котором могут быть реализованы устройства 154, 156 складывающихся законцовок. В показанном примере устройства 154, 156 складывающихся законцовок выполнены с возможностью перемещения подвижных поверхностей 134, 136 из выдвинутых положений 142, 144 в сложенные положения 146, 148 или промежуточные положения. В некоторых примерах устройства 154, 156 складывающихся законцовок выполнены с возможностью перемещения подвижных поверхностей 134, 136 из сложенных положений 146, 148 в выдвинутые положения 142, 144 или промежуточные положения. Хотя на примере показано два устройства 154, 156 складывающихся законцовок, изображенных в показанном примере, в дополнительном или альтернативном варианте реализации изобретения может быть использовано одно устройство складывающихся законцовок или более двух устройств складывающихся законцовок, содержащихся в реализации летательного аппарата, в которой используются одна или более двух складывающихся законцовок.
[0031] В показанном примере по ФИГ. 1, устройства 154, 156 складывающихся законцовок летательного аппарата 100 включают в себя приведенные в качестве примера модули 158, 160 управления складывающимися законцовками для управления устройствами 154, 156 складывающихся законцовок и/или мониторинга устройств 154, 156 складывающихся законцовок. Показаны два приведенных в качестве примера модуля 158, 160 управления складывающимися законцовками, расположенных возле кабины 180 пилотов летательного аппарата 100, однако модули 158, 160 управления устройствами складывающихся законцовок могут иметь одну или более частей, расположенных в других местах на летательном аппарате 100. Хотя на примере показано два модуля 158, 160 управления складывающимися законцовками, изображенные в показанном примере, может быть использован один модуль управления складывающимися законцовками или более двух модулей управления складывающимися законцовками, содержащихся в реализации летательного аппарата, в которой используются один или более двух складывающихся законцовок.
[0032] В некоторых примерах летательный аппарат 100 может иметь один или более модулей управления складывающимися законцовками для каждой поверхности управления и/или каждого устройства складывающихся законцовок летательного аппарата. Например, летательный аппарат 100 может использовать модули 158, 160 управления устройствами складывающихся законцовок для мониторинга подвижной поверхностью 134 крыла 102 и/или управления подвижной поверхностью 134 крыла 102. В другом примере летательный аппарат 100 может использовать модули 158, 160 управления устройствами складывающихся законцовок для мониторинга и/или управления одним или более такими органами, как предкрылки 112, 114, закрылки 116, 118, рули 124, 126 высоты и/или вертикальный стабилизатор 128. В некоторых примерах летательный аппарат 100 может иметь один модуль управления складывающимися законцовками для мониторинга множества поверхностей управления и/или устройств складывающихся законцовок летательного аппарата и/или управления множеством поверхностей управления и/или устройств складывающихся законцовок летательного аппарата. Например, летательный аппарат 100 может использовать модуль 158 управления складывающимися законцовками для мониторинга подвижных поверхностей 134, 136 крыльев 102, 104 подвижных поверхностей и/или управления подвижными поверхностями 134, 136 крыльев 102, 104. В некоторых примерах модули 158, 160 управления устройствами складывающихся законцовок выполняют мониторинг множества поверхностей управления летательного аппарата (например, руля высоты, закрылка, складывающейся законцовки и т.д.) и побуждают дополнительное устройство (например, дополнительный модуль управления, дополнительная система управления и т.д.) управлять (например, отправлять командный сигнал) указанным множеством поверхностей управления летательного аппарата. Например, модули 158, 160 управления устройствами складывающихся законцовок выполнены с возможностью мониторинга состояния руля 124 высоты и отправки информации о состоянии в модуль управления рулями высоты, который может использовать состояние для управления рулем 124 высоты. В некоторых случаях модули 158, 160 управления устройствами складывающихся законцовок выполняют мониторинг указанного множества поверхностей управления летательного аппарата независимо от дополнительного устройства (например, дополнительного модуля управления, дополнительной системы управления и т.д.). Например, модули 158, 160 управления устройствами складывающихся законцовок выполнены с возможностью мониторинга состояния руля 124 высоты. Модуль управления рулями высоты выполнен с возможностью мониторинга руля 124 высоты и/или управления им с приемом или без приема информации (например, команды, входных данных, состояния и т.д.) от модулей 158, 160 управления устройствами складывающихся законцовок.
[0033] В показанном примере по ФИГ. 1, приведенные в качестве примера модули 158, 160 управления складывающимися законцовками выполнены с возможностью мониторинга состояний устройств 154, 156 складывающихся законцовок, и на основании указанных состояний, управления устройствами 154, 156 складывающихся законцовок для регулировки их положения (положений). Например, модули 158, 160 управления устройствами складывающихся законцовок выполнены с возможностью получения показания датчика 162 для получения информации об этапе летных испытаний и/или информации об этапе полета. В некоторых примерах модули 158, 160 управления устройствами складывающихся законцовок выполнены с возможностью определения этапа летных испытаний или этапа полета исходя из полученной информации о летных испытаниях и/или информации об этапе полета. Например, этап летных испытаний и/или этап полета может соответствовать полету летательного аппарата 100, его перемещению по земной поверхности (например, выруливанию к выходу на посадку в летательный аппарат), неподвижному нахождению на земной поверхности (например, нахождению на стоянке возле выхода на посадку в летательный аппарат), посадке, взлету и т.д. Приведенные в качестве примера модули 158, 160 управления складывающимися законцовками также выполнены с возможностью получения показания датчиков 164, 166 для определения состояния компонента и/или системы устройств 154, 156 складывающихся законцовок. Например, датчики 164, 166 выполнены с возможностью определения положения привода (например, запорного клапана, пневматического клапана и т.д.), скорости двигателя (например, гидравлического двигателя, серводвигателя и т.д.), показания, относящегося к давлению (например, давлению воздуха, гидравлическому давлению и т.д.), и т.д. Хотя на примере показаны датчики 164, 166, расположенные на крыльях 102, 104 летательного аппарата 100, могут быть дополнительные датчики, расположенные в ином месте на летательном аппарате 100 для мониторинга компонентов и/или систем устройств 154, 156 складывающихся законцовок. Приведенные в качестве примера модули 158, 160 управления складывающимися законцовками выполнены с возможностью регулировки подвижных поверхностей 134, 136 с переходом из развернутых положений в неразвернутые положения. Например, модуль 158 управления складывающимися законцовками выполнен с возможностью регулировки подвижной поверхности 134 с переходом из выдвинутого положения 142 в сложенное положение 146 на основании по меньшей мере одной такой информации, как информация об этапе полета, состояние компонента и/или состояние системы устройства 154 складывающейся законцовки, показание (показания) датчика (датчиков) 162, 164, 166 и т.д. В некоторых примерах выдвинутые положения 142, 144 являются развернутыми положения. В некоторых случаях сложенные положения 146, 148 являются неразвернутыми положениями.
[0034] В показанном примере по ФИГ. 1 модули 158, 160 управления складывающимися законцовками получают информацию от удаленных электронных блоков 168, 170 и отправляют команды в удаленные электронные блоки 168, 170. В показанном примере на каждом из крыльев 102, 104 имеется удаленный электронный блок. Например, удаленные электронные блоки 168, 170 расположены на соответствующих крыльях 102, 104. Удаленные электронные блоки 168, 170 выполнены с возможностью получения информации датчиков от датчиков 164, 166, относящихся к устройствам 154, 156 складывающихся законцовок. Удаленные электронные блоки 168, 170 также выполнены с возможностью отправки команд (например, приводных команд) на компоненты и/или системы устройств 154, 156 складывающихся законцовок. Например, удаленный электронный блок 168 выполнен с возможностью отправки команды на привод устройства 154 складывающейся законцовки для перемещения устройства 154 складывающейся законцовки из выдвинутого положения 142 в сложенное положение 146. Удаленный электронный блок 168 выполнен с возможностью получения от датчиков информации, относящейся к устройству 154 складывающейся законцовки. Например, удаленный электронный блок 168 выполнен с возможностью получения скорости серводвигателя, положения подвижной поверхности 134 и т.д. от устройства 154 складывающейся законцовки. Хотя на ФИГ. 1 показаны два удаленных электронных блока 168, 170, может быть использован один удаленный электронный блок или более двух удаленных электронных блоков для мониторинга устройств 154, 156 складывающихся законцовок и управления устройствами 154, 156 складывающихся законцовок. В некоторых примерах удаленные электронные блоки 168, 170 независимо выполняют мониторинг устройств 154, 156 складывающихся законцовок и/или управляют устройствами 154, 156 складывающихся законцовок. Например, удаленные электронные блоки 168, 170 выполнены с возможностью мониторинга устройств 154, 156 складывающихся законцовок и/или управления устройствами 154, 156 складывающихся законцовок независимо от приема информации (например, команды, входных данных, состояния и т.д.) от модулей 158, 160 управления устройствами складывающихся законцовок. Например, удаленные электронные блоки 168, 170 выполнены с возможностью мониторинга устройств 154, 156 складывающихся законцовок и/или управления устройствами 154, 156 складывающихся законцовок с приемом или без приема указанной информации (например, команды, входных данных, состояния и т.д.) от модулей 158, 160 управления устройствами складывающихся законцовок, при этом модули 158, 160 управления устройствами складывающихся законцовок выполняют мониторинг устройств 154, 156 складывающихся законцовок.
[0035] На ФИГ. 2А показана блок-схема примера осуществления модулей 158, 160 управления складывающимися законцовками (folding wingtip, FWT) по ФИГ. 1. Приведенные в качестве примера модули 158, 160 управления складывающимися законцовками выполняют мониторинг устройств 154, 156 складывающихся законцовок и управляют устройствами 154, 156 складывающихся законцовок по ФИГ. 1. Приведенные в качестве примера модули 158, 160 управления складывающимися законцовками включают в себя приведенные в качестве примера модуль 200 сбора, регистрационный модуль 210, модуль 230 приведения в действие системы, модуль 240 мониторинга и оповещения, модуль 250 работы с последовательностью и управления, базу данных 270 и диспетчерский модуль 280 (gatekeeper).
[0036] В показанном примере по ФИГ. 2А модули 158, 160 управления складывающимися законцовками включают в себя модуль 200 сбора для запроса, фильтрации, получения, обработки и/или выбора входных данных 296 и/или информации из базы данных 270 относительно значения для флажка, состояния, статуса, переменной и т.д. Входные данные 296 могут включать в себя один или более элементов входных данных. В некоторых примерах модуль 200 сбора получает входные данные от удаленных электронных блоков 168, 170, которые включают в себя множество каналов сбора данных посредством сети 294. В показанном примере удаленный электронный блок 168 имеет канал А 260 данных и канал В 261 данных. Канал А 260 данных сообщается с компонентом А 262, а канал В 261 данных сообщается с компонентом В 263. Удаленный электронный блок 170 имеет канал С 264 данных и канал D 265 данных. Канал С 264 данных сообщается с компонентом С 266, а канал D 265 данных сообщается с компонентом D 267. В некоторых примерах модуль 200 сбора выполнен с возможностью отключения или задействования входных данных или канала данных на основании состояния компонента и/или системы, сообщающихся с удаленными электронными блоками 168, 170. Например, модуль 200 сбора выполнен с возможностью отключения канала А 260 данных, так как канал А 260 данных получает от компонента А 262 информацию о нереагирующем состоянии. В другом примере модуль 200 сбора выполнен с возможностью задействования канала В 261 данных, так как канал В 261 данных не получает информацию о нереагирующем состоянии от компонента В 263. Еще в одном примере модуль 200 сбора выполнен с возможностью отключения канала А 260 данных и канала В 261 данных. Модуль 200 сбора выполнен с возможностью задействования канала С 264 данных, так как канал С 264 данных не получает информацию о нереагирующем состоянии от компонента С 266. Модуль 200 сбора выполнен с возможностью отключения или задействования дополнительных каналов данных таким же образом, как описано выше.
[0037] В некоторых примерах входные данные 296, подаваемые в модули 158, 160 управления устройствами складывающихся законцовок через модуль 200 сбора, получают от дополнительного модуля управления (например, модуля управления поверхностями управления летательного аппарата, модуля управления полетом и т.д.), компьютерной системы, внешней относительно летательного аппарата (например, компьютерной системы на другом летательном аппарате в непосредственной близости, удаленного сервера, спутника и т.д.), бортового датчика (например, датчика высоты, датчика скорости и т.д.) и т.д. Входные данные 296 могут представлять собой необработанную информацию (например, необработанные данные от дополнительного модуля управления, неотмасштабированные данные от датчика и т.д.) или обработанную информацию (например, обработанные данные от дополнительного модуля управления, отмасштабированные данные от датчика и т.д.).
[0038] В некоторых примерах входные данные 296 могут представлять собой значение, вычисленное на основании необработанной информации, обработанной информации и/или того и другого. В некоторых случаях входные данные 296 могут быть получены из базы данных 270. Например, модуль 200 сбора выполнен с возможностью выбора предыдущего показания датчика, предыдущего вычисленного значения параметра и т.д., предназначенных для использования одним или более алгоритмами, процессами, программами и т.д. Модуль 200 сбора выдает необработанную информацию и/или обработанную информацию на основании входных данных 296 в регистрационный модуль 210, модуль 230 приведения в действие системы, модуль 240 мониторинга и оповещения и базу данных 270.
[0039] В показанном примере по ФИГ. 2А, приведенные в качестве примера модули 158, 160 управления складывающимися законцовками включают в себя регистрационный модуль 210 для определения состояния компонента и/или системы модулей 158, 160 управления устройствами складывающихся законцовок. Например, регистрационный модуль 210 выполнен с возможностью определения состояния компонента и/или системы на основании информации, выдаваемой модулем 200 сбора. Информация, выдаваемая модулем 200 сбора, может представлять собой необработанную информацию (например, неотмасштабированную информацию датчиков, вычисленную информацию о состоянии и т.д.) и/или обработанную информацию (например, отмасштабированную информацию датчиков, вычисленную информацию о состоянии и т.д.). В некоторых примерах регистрационный модуль 210 выдает входные данные в дополнительный модуль (например, модуль 240 мониторинга и оповещения) посредством изменения значения переменной (например, флажка), подлежащей считыванию указанным дополнительным модулем на следующем цикле управления модулей 158, 160 управления устройствами складывающихся законцовок. Например, регистрационный модуль 210 выполнен с возможностью установки флажка предупреждения и сохранения флажка предупреждения в базе данных 270 во время первого цикла управления. Во время второго цикла управления модуль 240 мониторинга и оповещения может извлечь флажок предупреждения из базы данных 270 и выполнить действие на основании флажка предупреждения. В показанном примере регистрационный модуль 210 выдает необработанную информацию и/или обработанную информацию в модуль 250 работы с последовательностью и управления и в базу данных 270.
[0040] В показанном примере по ФИГ. 2А, приведенные в качестве примера модули 158, 160 управления складывающимися законцовками включают в себя модуль 230 приведения в действие системы для задействования функции компонента, системы и т.д. устройств 154, 156 складывающихся законцовок по ФИГ. 1. Например, модуль 230 приведения в действие системы выполнен с возможностью задействования функции компонента, системы и т.д. на основании информации, выдаваемой модулем 200 сбора. Информация, выдаваемая модулем 200 сбора, может представлять собой необработанную информацию (например, неотмасштабированную информацию датчиков, вычисленную информацию о состоянии и т.д.) и/или обработанную информацию (например, отмасштабированную информацию датчиков, вычисленную информацию о состоянии и т.д.). В некоторых примерах модуль 230 приведения в действие системы предупреждает приведенные в качестве примера модули 158, 160 управления складывающимися законцовками о том, что компонент, система и т.д. приведена в действие. В некоторых случаях модуль 230 приведения в действие системы задействует функцию компонента, системы и т.д. посредством изменения значения переменной. Например, модуль 230 приведения в действие системы выполнен с возможностью задействования функции компонента, системы и т.д. посредством изменения значения флажка (например, флажка в компьютере и/или машиночитаемой инструкции). В некоторых примерах модуль 230 приведения в действие системы выдает входные данные в дополнительный модуль (например, модуль 240 мониторинга и оповещения) посредством изменения значения переменной (например, флажка), подлежащей считыванию указанным дополнительным модулем на следующем цикле управления модулей 158, 160 управления устройствами складывающихся законцовок. Например, модуль 230 приведения в действие системы выполнен с возможностью установки флажка предупреждения и сохранения флажка предупреждения в базе данных 270 во время первого цикла управления. Во время второго цикла управления модуль 240 мониторинга и оповещения может извлечь флажок предупреждения из базы данных 270 и выполнить действие на основании флажка предупреждения. В показанном примере модуль 230 приведения в действие системы выдает необработанную информацию и/или обработанную информацию в модуль 250 работы с последовательностью и управления и в базу данных 270.
[0041] В показанном примере по ФИГ. 2А, приведенные в качестве примера модули 158, 160 управления складывающимися законцовками включают в себя модуль 240 мониторинга и оповещения для реализации функций, такой как, например, классификация состояний отсутствия реагирования, выработка предупреждений, мониторинг предупреждений и отправка информации в пользовательский интерфейс, связанный с устройствами 154, 156 складывающихся законцовок по ФИГ 1. В некоторых примерах информацию доводят до сведения оператора (например, техника, пилота и т.д.) посредством пользовательского интерфейса и/или дополнительного устройства вывода, такого как светоизлучающий диод (СИД), динамик и т.д., на основании предупреждений. В некоторых примерах модуль 240 мониторинга и оповещения выполняет мониторинг состояния компонента и/или системы на предмет изменения состояния. Например, модуль 240 мониторинга и оповещения выполнен с возможностью мониторинга состояния компонента. Состояние компонента может изменяться с реагирующего состояния на нереагирующее состояние. Модуль 240 мониторинга и оповещения выполнен с возможностью классификации нереагирующего состояния и выработки предупреждения на основании изменения состояния компонента. В некоторых случаях модуль 240 мониторинга и оповещения выполнен с возможностью мониторинга этапа, действия, события и т.д. работы устройства складывающихся законцовок (например, складывания законцовки устройством складывающихся законцовок, раскладывания законцовки устройством складывающихся законцовок и т.д.). Например, модуль 240 мониторинга и оповещения выполнен с возможностью мониторинга того, завершило ли устройство складывающихся законцовок свою работу и т.д. Модуль 240 мониторинга и оповещения выполнен с возможностью выработки предупреждения на основании завершения устройством складывающихся законцовок выполнения указанных этапа, действия, события и т.д. работы устройства складывающихся законцовок.
[0042] В некоторых примерах информация, выдаваемая модулем 240 мониторинга и оповещения, может представлять собой необработанную информацию (например, неотмасштабированную информацию датчиков, информацию о невычисленном состоянии и т.д.) и/или обработанную информацию (например, отмасштабированную информацию датчиков, информацию о вычисленном состоянии и т.д.). Например, модуль 240 мониторинга и оповещения выполнен с возможностью выработки предупреждения относительно установленного нереагирующего состояния компонента (например, электромагнита гидросистемы, пневмопривода и т.д.) и отправки предупреждения в пользовательский интерфейс устройства складывающихся законцовок. Модуль 240 мониторинга и оповещения выдает необработанную информацию и/или обработанную информацию в модуль 250 работы с последовательностью и управления и в базу данных 270.
[0043] В показанном примере по ФИГ. 2А, приведенные в качестве примера модули 158, 160 управления складывающимися законцовками включают в себя модуль 250 работы с последовательностью и управления для определения и выполнения последовательности событий относительно работы устройств 154, 156 складывающихся законцовок по ФИГ. 1. В некоторых примерах модуль 250 работы с последовательностью и управления автоматически исполняет последовательность событий при нормальной работе на основании полученной информации. Например, модуль 250 работы с последовательностью и управления выполнен с возможностью автоматического определения и выполнения последовательности событий при нормальной работе на основании информации, получаемой от регистрационного модуля 210 (например, входной информации из кабины экипажа, информации об этапе полета и т.д.), модуля 230 приведения в действие системы (например, информации о приведении в действие устройств складывающихся законцовок, информации о приведении в действие привода устройств складывающихся законцовок и т.д.), модуля 240 мониторинга и оповещения (например, информации о предупреждениях) и базу данных 270. В некоторых примерах модуль 250 работы с последовательностью и управления определяет состояние компонента и/или системы на основании показания датчика, перед выполнением этапа или действия последовательности для нормальной работы. Например, модуль 250 работы с последовательностью и управления выполнен с возможностью определения состояния компонента, используемого на первом этапе, перед первым этапом и т.д. для последующих этапов или действий последовательности для нормальной работы. В дополнительном или альтернативном варианте реализации изобретения модуль 250 работы с последовательностью и управления выполнен с возможностью определения состояния компонента, используемого на первом этапе во время и/или после первого этапа и т.д. для последующих этапов или действий последовательности для нормальной работы.
[0044] В некоторых примерах модуль 250 работы с последовательностью и управления определяет, что последовательность событий при отсутствии реагирования складывающихся законцовок может быть выполнена на основании информации, получаемой от регистрационного модуля 210 (например, входной информации из кабины экипажа, информации об этапе полета и т.д.), модуля 230 приведения в действие системы (например, информации о приведении в действие устройств складывающихся законцовок, информации о приведении в действие привода устройств складывающихся законцовок и т.д.), модуля 240 мониторинга и оповещения (например, информации о предупреждениях) и базы данных 270. В некоторых случаях модуль 250 работы с последовательностью и управления определяет состояние компонента и/или системы на основании показания датчика, перед выполнением этапа или действия последовательности при отсутствии реагирования. Например, модуль 250 работы с последовательностью и управления выполнен с возможностью определения состояния компонента, используемого на первом этапе, перед первым этапом и т.д. для последующих этапов или действий последовательности при отсутствии реагирования. В дополнительном или альтернативном варианте реализации изобретения модуль 250 работы с последовательностью и управления выполнен с возможностью определения состояния компонента, используемого на первом этапе во время и/или после первого этапа и т.д. для последующих этапов или действий последовательности при отсутствии реагирования.
[0045] В некоторых примерах модуль 250 работы с последовательностью и управления выполнен с возможностью выработки команд и передачи указанных команд в соответствующие компоненты и/или системы для исполнения указанных команд. Например, модуль 250 работы с последовательностью и управления выполнен с возможностью выработки и передачи одной или более выходящих электронных команд на компонент, систему и т.д. устройств 154, 156 складывающихся законцовок по ФИГ. 1. В некоторых примерах модуль 250 работы с последовательностью и управления выполнен с возможностью выработки множества команд и их сохранения в базе данных для будущего выполнения. Например, модуль 250 работы с последовательностью и управления выполнен с возможностью выдачи первой команды из множества выработанных команд и сохранения остальных команд в базе данных 270. Когда модуль 250 работы с последовательностью и управления определяет, что первая команда выполнена, модуль 250 работы с последовательностью и управления может извлечь вторую команду из базы данных 270 и выдать вторую команду и т.д. для дополнительных выработанных команд.
[0046] В некоторых примерах модуль 250 работы с последовательностью и управления выдает входные данные в дополнительный модуль (например, модуль 240 мониторинга и оповещения) посредством изменения значения переменной (например, флажка), подлежащей считыванию указанным дополнительным модулем на следующем цикле управления модулей 158, 160 управления устройствами складывающихся законцовок. Например, модуль 250 работы с последовательностью и управления выполнен с возможностью установки флажка предупреждения и сохранения флажка предупреждения в базе данных 270 во время первого цикла управления. Во время второго цикла управления модуль 240 мониторинга и оповещения может извлечь флажок предупреждения из базы данных 270 и выполнить действие на основании флажка предупреждения.
[0047] В показанном примере по ФИГ. 2А модули 158, 160 управления устройствами складывающихся законцовок включают в себя базу данных 270 для записи данных (например, полученной информации от датчиков, полученных состояний компонентов, вычисленных значений параметров и т.д.). База данных 270 может быть реализована посредством энергозависимой памяти (например, синхронного динамического ОЗУ (SDRAM), динамического ОЗУ (DRAM), динамической памяти с произвольным доступом от компании RAMBUS (RDRAM) и т.д.) и/или энергонезависимой памяти (например, флэш-памяти). В дополнительном или альтернативном варианте реализации изобретения база данных 270 может быть реализована одним или более запоминающими устройствами с удвоенной скоростью передачи данных (double data rate, DDR), такими как DDR, DDR2, DDR3, mobile DDR (mDDR) и т.д. В дополнительном или альтернативном варианте реализации изобретения база данных 270 может быть реализована одним или более запоминающими устройствами большой емкости, такими как жесткий диск (жесткие диски), компакт-диск (компакт-диски), цифровой универсальный диск (цифровые универсальные диски) и т.д. Хотя приведенная в качестве примера база данных 270 показана в виде одиночной базы данных, база данных 270 может быть реализована любым количеством и/или типом (типами) баз данных.
[0048] В показанном примере по ФИГ. 2А, приведенные в качестве примера модули 158, 160 управления складывающимися законцовками включают в себя диспетчерский модуль 280 для мониторинга и/или перехвата выходящих электронных команд на компонент и/или систему устройств 154, 156 складывающихся законцовок по ФИГ. 1. Например, диспетчерский модуль 280 перехватывает выходящие электронные команды от модуля 250 работы с последовательностью и управления. В некоторых примерах диспетчерский модуль 280 получает информацию, относящуюся к информации об этапе полета, информации о состоянии складывающихся законцовок и т.д., и обеспечивает возможность беспрепятственного прохода выходящих электронных команд. В некоторых случаях диспетчерский модуль 280 изменяет выходящие электронные команды на основании полученной информации. Диспетчерский модуль 280 выдает выходные данные 298, при этом выходные данные 298 являются неизмененными или измененными выходящими электронными командами. Выходные данные 298 могут включать в себя один или более элементов выходных данных. Диспетчерский модуль 280 также выполнен с возможностью выдачи необработанной и/или обработанной информации в базу данных 270. Например, диспетчерский модуль 280 выполнен с возможностью сохранения значения неизмененной или измененной выходящей электронной команды в базе данных 270.
[0049] В некоторых примерах диспетчерский модуль 280 может быть использован для мониторинга и/или перехвата выходящих электронных команд для поверхности управления летательного аппарата. Например, диспетчерский модуль 280 выполнен с возможностью мониторинга команды для приведения в действие или управления одним или более таким органами управления, как предкрылки 112, 114, закрылки 116, 118, руль 124, 126 высоты и/или вертикальный стабилизатор 128 по ФИГ. 1. Диспетчерский модуль 280 выполнен с возможностью проверки достоверности команды управления поверхностью управления летательного аппарата. Например, диспетчерский модуль 280 выполнен с возможностью проверки достоверности команды на основании входной информации из кабины экипажа, информации об этапе полета или, в целом, информации, относящейся к поверхности управления летательного аппарата летательного аппарата 100 по ФИГ. 1.
[0050] В показанном примере по ФИГ. 2А, приведенные в качестве примера модули 158, 160 управления складывающимися законцовками могут быть соединены с удаленными электронными блоками 168, 170 по ФИГ. 1 посредством сети 294. Входные данные 296 и выходные данные 298 могут быть переданы посредством сети 294. Сеть 294 согласно показанному примеру по ФИГ. 1 представляет собой сеть управления процессами летательных аппаратов. Однако приведенная в качестве примера сеть 294 может быть реализована с использованием любой подходящей проводной и/или беспроводной сети (сетей), включая, например, одну или более шин данных, одну или более сетей управления процессами летательных аппаратов, одну или более локальных сетей (Local Area Network, LAN), одну или более беспроводных локальных сетей, одну или более сотовых сетей, одну или более частных сетей, одну или более общественных сетей и т.д. Сеть 294 обеспечивает связь приведенных в качестве примера модулей 158, 160 управления складывающимися законцовками с удаленными электронными блоками 168, 170. При использовании в настоящем документе выражение "связь", включая его варианты, охватывает прямую связь и/или опосредованную связь через один или более промежуточных компонентов и не требует непосредственной физической (например, проводной) связи и/или постоянной связи, а включает в себя избирательную связь с периодическими или непериодическими интервалами, а также разовые событиями.
[0051] На ФИГ. 2В показана блок-схема примера осуществления модулей 158, 160 управления складывающимися законцовками, как описано для ФИГ. 2А. На блок-схеме по ФИГ. 2А подробно показаны приведенные в качестве примера подмодули или подсистемы, которые могут выполнять функции мониторинга и управления в отношении устройств 154, 156 складывающихся законцовок по ФИГ. 1. Работа приведенных в качестве примера подмодулей происходит согласно путям потока данных и зависимостям доставки информации, описанным на ФИГ. 2А.
[0052] Модуль 200 сбора по ФИГ. 2А и 2В включает в себя приведенные в качестве примера сетевой интерфейс 202, интерфейс 204 датчиков, устройство 206 обработки информации и устройство 208 проверки достоверности информации. Модуль 200 сбора включает в себя сетевой интерфейс 202 для обеспечения взаимодействия с шиной и/или сетью. Например, сетевой интерфейс 202 может представлять собой шину внутреннего контроллера, внутреннюю сеть управления процессами и т.д. Сетевой интерфейс 202 может реализовывать один или более протоколов связи, таких как, например, протоколы шины (шины сети контроллеров (controller area network, CAN), Modbus, Profibus и т.д.), протоколы Ethernet (например, EtherCAT, Profinet и т.д.), последовательные протоколы (например, RS-232, RS-485 и т.д.). Сетевой интерфейс 202 может быть реализован с использованием любой подходящей проводной и/или беспроводной сети (сетей), включая, например, одну или более шин данных, одну или более сетей управления процессами летательных аппаратов, одну или более локальных сетей, одну или более беспроводных локальных сетей, одну или более сотовых сетей, одну или более частных сетей, одну или более общественных сетей и т.д.
[0053] В некоторых примерах сетевой интерфейс 202 обеспечивает связь приведенных в качестве примера модулей 158, 160 управления складывающимися законцовками с внешними модулями и/или внешними системам. Например, сетевой интерфейс 202 выполнен с возможностью обеспечения связи модулей 158, 160 управления устройствами складывающихся законцовок с удаленными электронными блоками 168, 170 по ФИГ. 1. В некоторых примерах сетевой интерфейс 202 получает информацию от удаленных электронных блоков 168, 170. Например, сетевой интерфейс 202 выполнен с возможностью получения информации о состоянии компонента, показании датчика, состоянии системы и т.д. от удаленных электронных блоков 168, 170. В некоторых примерах сетевой интерфейс 202 сохраняет информацию, полученную от удаленных электронных блоков 168, 170, в базе данных 270.
[0054] Модуль 200 сбора по ФИГ. 2А и 2В включает в себя интерфейс 204 датчиков для взаимодействия с датчиками и/или дополнительными системами сбора данных, которые взаимодействуют с датчиками. Например, интерфейс 204 датчиков выполнен с возможностью обеспечения связи модулей 158, 160 управления устройствами складывающихся законцовок с датчиком 162. Интерфейс 204 датчиков представляет собой интерфейс, который собирает и/или получает информацию датчиков. Информация датчиков может быть получена от датчиков, которые выдают аналоговые электрические сигналы (например, показания, относящиеся к току, показания, относящиеся к напряжению, и т.д.), таких как, например, акселерометры, датчики света, датчиков давления, датчики звука, датчики температуры и т.д. Информация датчиков может быть получена от датчиков, которые выдают цифровые электрические сигналы, таких как, например, цифровые акселерометры, цифровые датчики температуры и т.д. Дополнительные датчики с аналоговыми выходами и/или цифровыми выходами могут включать в себя, например, химические датчики, датчики потока, датчики силы, датчики тепла, магнитные датчики, датчики положения, датчики присутствия, бесконтактные датчики, датчиков скорости и т.д.
[0055] Модуль 200 сбора по ФИГ. 2А и 2В включает в себя устройство 206 обработки информации для выбора и/или обработки входных данных, подаваемых в модули 158, 160 управления устройствами складывающихся законцовок. Например, устройство 206 обработки информации выполнено с возможностью выбора и/или обработки входных данных 296. В некоторых примерах устройство 206 обработки информации выбирает полученные искомые входные данные, предназначенные для использования одним или более алгоритмами, процессами, программами и т.д. Например, устройство 206 обработки информации выполнено с возможностью обработки значения входных данных посредством преобразования (например, преобразования с использованием преобразовательного вычисления, преобразования в отличающиеся единицы измерения и т.д.), масштабирования (например, масштабирования с использованием коэффициента масштабирования) и/или пересчета (например, пересчета с использованием заданной кривой, пересчета с использованием заданного уравнения) значения входных данных 296 для использования посредством модулей 158, 160 управления устройствами складывающихся законцовок. В некоторых примерах устройство 206 обработки информации выбирает входные данные 296 посредством отправки запроса в базу данных 270. После приема базой данных 270 запроса, отправленного с устройства 206 обработки информации, база данных 270 передает входные данные 296 на устройство 206 обработки информации.
[0056] Модуль 200 сбора по ФИГ. 2А и 2В включает в себя устройство 208 проверки достоверности информации для проверки достоверности входных данных, подаваемых в модули 158, 160 управления устройствами складывающихся законцовок. Например, устройство 208 проверки достоверности информации выполнено с возможностью проверки достоверности входных данных 296. В некоторых примерах устройство 208 проверки достоверности информации анализирует входные данные 296 для определения, следует ли считать входные данные 296 надежными и/или заслуживающими доверия для последующего использования модулями 158, 160 управления устройствами складывающихся законцовок. В некоторых примерах устройство 208 проверки достоверности информации сравнивает входные данные 296 с диапазоном допустимых значений для входных данных 296. Устройство 208 проверки достоверности информации выполнено с возможностью получения диапазона допустимых значений для входных данных 296 из базы данных 270. При получении диапазона допустимых значений устройство 208 проверки достоверности информации может сравнить входные данные 296 с полученным диапазоном допустимых значений. Например, устройство 208 проверки достоверности информации выполнено с возможностью анализа входных данных в виде показания, относящегося к давлению, составляющему 1000 фунтов на квадратный дюйм (68,95 гПа), для датчика давления. Устройство 208 проверки достоверности информации выполнено с возможностью получения диапазона значений давления величиной 0-600 фунтов на квадратный дюйм (0-41,37 гПа) для датчика давления из базы данных 270. При получении диапазона значений давления для датчика давления устройство 208 проверки достоверности информации может сравнить входные данные в виде показания, относящегося к давлению, величиной 1000 фунтов на квадратный дюйм (68,95 гПа), с полученным диапазоном давления величиной 0-600 фунтов на квадратный дюйм (0-41,37 гПа) и определить, что входные данные в виде показания, относящегося к давлению, выходят за пределы диапазона. При определении, что входные данные 296 выходят за пределы диапазона, устройство 208 проверки достоверности информации признает входные данные 296 недостоверными путем игнорирования входных данных 296, установки значения входных данных 296 на другое значение (например, на известное достоверное значение, на нулевое значение, на пустое значение и т.д.). Устройство 208 проверки достоверности информации также выполнено с возможностью выдачи предупреждения в модули 158, 160 управления устройствами складывающихся законцовок о том, что входные данные 296 являются недостоверными. Например, устройство 208 проверки достоверности информации выполнено с возможностью установки флажка (например, флажка недостоверных входных данных, флажка предупреждения и т.д.), которым выдают предупреждение в модули 158, 160 управления устройствами складывающихся законцовок о том, что входные данные 296 являются недостоверными.
[0057] В некоторых примерах устройство 208 проверки достоверности информации анализирует входные данные 296 для определения их достоверности на основании состояния летательного аппарата (например, летательный аппарат находится выше 10 000 футов (3048 м), выпущено шасси и т.д.). Например, устройство 208 проверки достоверности информации выполнено с возможностью определения, что несмотря на то, что значение входных данных 296 находится в пределах допустимого диапазона значений входных данных 296, указанное значение входных данных 296 является недостоверным на основании состояния летательного аппарата. Например, устройство 208 проверки достоверности информации выполнено с возможностью приема входных данных 296, при этом входные данные 296 являются вводом команды для приведения в действие приводной системы складывающихся законцовок с перемещением подвижной поверхности 134 по ФИГ. 1 из выдвинутого положения 142 в сложенное положение 146. Устройство 208 проверки достоверности информации выполнено с возможностью определения, что значение команды ввода находится в пределах допустимого диапазона значений для ввода команды. Однако устройство 208 проверки достоверности информации выполнено с возможностью определения, что летательный аппарат находится в полете (например, летательный аппарат имеет скорость более 100 миль в час (161 км/ч), летательный аппарат находится на высоте более 1 000 футов (305 м) и т.д.). При определении нахождения летательного аппарата в полете устройство 208 проверки достоверности информации признает ввод команды недостоверным. Например, устройство 208 проверки достоверности информации выполнено с возможностью установки значения входных данных 296 на ноль и установки флажка (например, флажка недостоверных входных данных), выдающего предупреждение в модули 158, 160 управления устройствами складывающихся законцовок о том, что значение входных данных 296 является недостоверным.
[0058] Регистрационный модуль 210 по ФИГ. 2А и 2В включает в себя приведенные в качестве примера устройство 212 регистрации входных данных, поступающих из кабины экипажа, устройство 214 регистрации этапов полета, устройство регистрации 216 состояния складывающихся законцовок, устройство 218 регистрации состояния стопоров складывающихся законцовок и устройство 220 регистрации состояния фиксаторов складывающихся законцовок. Регистрационный модуль 210 по ФИГ. 2А и 2В включает в себя устройство 212 регистрации входных данных, поступающих из кабины экипажа, для регистрации состояния входных данных, поступающих из кабины экипажа летательного аппарата. Например, устройство 212 регистрации входных данных, поступающих из кабины экипажа, выполнено с возможностью получения входной информации о состоянии из кабины экипажа из кабины экипажа летательного аппарата 100. Кабиной экипажа является область, обычно возле передней части летательного аппарата, из которой пилот управляет летательным аппаратом. Кабина экипажа летательного аппарата содержит пилотажные приборы, размещенные на панели приборов, органы управления полетом, которые обеспечивают пилоту возможность управлять полетом летательного аппарата и т.д.
[0059] В некоторых примерах в кабине экипажа могут находиться пилотажные приборы и/или органы управления полетом для устройства складывающихся законцовок. Например, в кабине экипажа могут находиться кнопки, ручки, рычаги, переключатели и т.д., которые пилот может приводиться в действие для выдачи входных данных, подаваемых в модули 158, 160 управления устройствами складывающихся законцовок для мониторинга и/или для управления устройствами 154, 156 складывающихся законцовок по ФИГ. 1. В некоторых примерах воздействие на один или более таких элементов, как кнопки, ручки, рычаги, переключатели и т.д. в кабине экипажа, приводит к началу операции складывания законцовок (например, складывания подвижных поверхностей 134, 136, раскладывания подвижных поверхностей 134, 136 и т.д.). Например, в кабине экипажа может находиться рычаг, который при приведении его в действие выдает входные данные 296 в модули 158, 160 управления устройствами складывающихся законцовок для перемещения устройств 154, 156 складывающихся законцовок в выдвинутые положения 142, 144. Устройство 212 регистрации входных данных, поступающих из кабины экипажа, выполнено с возможностью определения, что состояние рычага (например, выходные данные рычага) является либо приведенным в действие (например, перемещают устройства 154, 156 складывающихся законцовок в выдвинутые положения 142, 144), либо незадействованным (например, не перемещают устройства 154, 156 складывающихся законцовок в выдвинутые положения 142, 144). Например, когда рычаг приводится в действие для перемещения устройств 154, 156 складывающихся законцовок из сложенных положений 146, 148 в выдвинутые положения 142, 144, устройство 212 регистрации входных данных, поступающих из кабины экипажа, может определять, что задействованы входные данные 296 от рычага.
[0060] Регистрационный модуль 210 по ФИГ. 2А и 2В включает в себя устройство 214 регистрации этапов полета для регистрации выполнения летательным аппаратом этапа полетного плана или этапа полета в течение периода времени. Полетный план может включать в себя этапы полета, такие как, например, отход от выхода на посадку в аэропорту, руление к взлетно-посадочной полосе, взлет с взлетно-посадочной полосы, полет на крейсерской высоте, посадка на взлетно-посадочную полосу и т.д. В некоторых примерах устройство 214 регистрации этапов полета определяет этап полета летательного аппарата на основании показания датчика (например, показания датчика высоты, показания датчика скорости, показания датчика положения шасси и т.д.). В некоторых случаях устройство 214 регистрации этапов полета определяет этап полета летательного аппарата на основании состояния летательного аппарата, такого как, например, развертывание шасси, уменьшение высоты летательного аппарата и т.д.
[0061] Регистрационный модуль 210 по ФИГ. 2А и 2В включает в себя устройство регистрации 216 состояния складывающихся законцовок для регистрации состояния устройства складывающихся законцовок. Например, устройство регистрации 216 состояния складывающихся законцовок выполнено с возможностью регистрации состояний устройств 154, 156 складывающихся законцовок по ФИГ. 1. В некоторых примерах состояние устройств складывающихся законцовок может быть режимом устройств складывающихся законцовок. Режим может быть, например, активным режимом (например, режимом, который включает в себя складывание законцовки, режимом, который включает в себя раскладывание законцовки и т.д.) или режимом ожидания (например, режимом, который включает в себя отсутствие перемещения законцовки). Например, устройство регистрации 216 состояния складывающихся законцовок выполнено с возможностью регистрации того, что состоянием устройств 154, 156 складывающихся законцовок является активный режим или режим ожидания. В некоторых примерах состояние устройств складывающихся законцовок может быть положением устройств складывающихся законцовок. Например, состояния устройств 154, 156 складывающихся законцовок могут относиться к положениям подвижных поверхностей 134, 136 по ФИГ. 1, при этом указанные положения представляют собой выдвинутые положения 142, 144, сложенные положения 146, 148 или промежуточные положения. Например, устройство регистрации 216 состояния складывающихся законцовок выполнено с возможностью регистрации того, что состоянием устройства 154 складывающейся законцовки является выдвинутое положение, сложенное положение, промежуточное положение и т.д.
[0062] Регистрационный модуль 210 по ФИГ. 2А и 2В включает в себя устройство 218 регистрации состояния стопоров складывающихся законцовок для регистрации положения одного или более стопорных штифтов устройства складывающихся законцовок. Например, устройство 218 регистрации состояния стопоров складывающихся законцовок выполнено с возможностью регистрации положения одного или более стопорных штифтов устройств 154, 156 складывающихся законцовок по ФИГ.1. В некоторых примерах устройство 218 регистрации состояния стопоров складывающихся законцовок определяет, что указанное положение является положением стопорения (например, выдвинутым положением) или положением отсутствия стопорения (например, отведенным положением). Стопорные штифты могут быть застопорены или выдвинуты, когда законцовки находятся в сложенном положении или выдвинутом положении. Например, устройство 218 регистрации состояния стопоров складывающихся законцовок выполнено с возможностью определения, что стопорные штифты выдвинуты, на основании показания, полученного от датчика положения защелки (например, индуктивного бесконтактного датчика, датчика углового положения, датчика линейного положения и т.д.). Стопорные штифты могут быть отведены, когда устройства 154, 156 складывающихся законцовок находятся в процессе перемещения из одного положения в другое положение. Например, устройство 218 регистрации состояния стопоров складывающихся законцовок выполнено с возможностью определения, что стопорные штифты устройств 154, 156 складывающихся законцовок отведены, на основании показания, полученного от датчика положения защелки.
[0063] Регистрационный модуль 210 по ФИГ. 2А и 2В включает в себя устройство 220 регистрации состояния фиксаторов складывающихся законцовок для регистрации положения одного или более фиксаторов устройства складывающихся законцовок. Например, устройство 220 регистрации состояния фиксаторов складывающихся законцовок выполнено с возможностью регистрации положения одного или более фиксаторов устройств 154, 156 складывающихся законцовок по ФИГ. 1. В некоторых примерах устройство 220 регистрации состояния фиксаторов складывающихся законцовок определяет, что указанное положение является положением фиксации, положением расфиксации или промежуточным положением (например, средним положением, положением между положением фиксации и положением расфиксации и т.д.). Устройство 220 регистрации состояния фиксаторов складывающихся законцовок выполнено с возможностью регистрации положения множества фиксаторов, таких как, например, один или более основных фиксаторов, один или более вспомогательных фиксаторов и т.д. Например, устройство 220 регистрации состояния фиксаторов складывающихся законцовок выполнено с возможностью определения, что положение основного фиксатора устройств 154, 156 складывающихся законцовок является положением фиксации. В другом примере устройство 220 регистрации состояния фиксаторов складывающихся законцовок выполнено с возможностью определения, что положение вспомогательного фиксатора является средним положением. В некоторых примерах устройство 220 регистрации состояния фиксаторов складывающихся законцовок определяет положение основных фиксаторов и/или вспомогательных фиксаторов на основании показания, полученного от датчика положения фиксатора (например, индуктивного бесконтактного датчика, датчика углового положения, датчика линейного положения и т.д.).
[0064] Модуль 230 приведения в действие системы по ФИГ. 2А и 2В включает в себя приведенные в качестве примера устройство 232 приведения в действие устройств складывающихся законцовок, устройство 234 приведения в действие приводной системы устройств складывающихся законцовок, устройство 236 приведения в действие удаленного электронного блока и устройство 238 приведения в действие компонента. Модуль 230 приведения в действие системы по ФИГ. 2А и 2В включает в себя устройство 232 приведения в действие устройств складывающихся законцовок для приведения в действие устройства складывающихся законцовок. Например, устройство 232 приведения в действие устройств складывающихся законцовок выполнено с возможностью приведения в действие устройства 154, 156 складывающихся законцовок по ФИГ. 1. В некоторых примерах устройство 232 приведения в действие устройств складывающихся законцовок выполнено с возможностью установки флажка (например, флажка приведения в действие, флажка предупреждения и т.д.), которым выдают предупреждение в модули 158, 160 управления устройствами складывающихся законцовок о том, что устройство складывающихся законцовок приведено в действие и/или отключено. Например, устройство 232 приведения в действие устройств складывающихся законцовок выполнено с возможностью установки флажка приведения в действие устройств складывающихся законцовок для обеспечения возможности мониторинга и/или управления устройствами 154, 156 складывающихся законцовок посредством модулей 158, 160 управления устройствами складывающихся законцовок.
[0065] В некоторых примерах, когда устройство 232 приведения в действие устройств складывающихся законцовок приводит в действие устройства 154, 156 складывающихся законцовок, модули 158, 160 управления устройствами складывающихся законцовок получают разрешение на выполнение множества действий. Например, когда устройство 232 приведения в действие устройств складывающихся законцовок приводит в действие устройства 154, 156 складывающихся законцовок (например, посредством установки флажка приведения в действие устройств складывающихся законцовок для устройств 154, 156 складывающихся законцовок), модули 158, 160 управления устройствами складывающихся законцовок могут исполнить функцию, такую как привод компонента устройств 154, 156 складывающихся законцовок (например, фиксацию основного фиксатора, выдвижение стопорного штифта и т.д.), с приведением в действие подсистемы устройств 154, 156 складывающихся законцовок (например, с приведением в действие привода устройства складывающихся законцовок, с приведением в действие удаленного электронного блока и т.д.) и т.д. В некоторых случаях модули 158, 160 управления устройствами складывающихся законцовок не могут выполнять мониторинг устройства складывающихся законцовок и/или управлять устройством складывающихся законцовок без приведения в действие устройством 232 устройства складывающихся законцовок. Например, если устройство 232 приведения в действие устройств складывающихся законцовок не устанавливает флажок приведения в действие устройств складывающихся законцовок для устройств 154, 156 складывающихся законцовок, то модули 158, 160 управления устройствами складывающихся законцовок не могут получить разрешение на мониторинг устройств 154, 156 складывающихся законцовок и/или управление устройствами 154,156 складывающихся законцовок.
[0066] Модуль 230 приведения в действие системы по ФИГ. 2А и 2В также включает в себя устройство 234 приведения в действие приводной системы устройств складывающихся законцовок для приведения в действие приводной системы устройства складывающихся законцовок. Например, устройство 234 приведения в действие приводной системы устройств складывающихся законцовок выполнено с возможностью приведения в действие приводной системы (например, гидравлической системы, пневматической системы и т.д.) устройств 154, 156 складывающихся законцовок по ФИГ. 1. В некоторых примерах устройство 234 приведения в действие приводной системы устройств складывающихся законцовок выполнено с возможностью установки флажка (например, флажка приведения в действие, флажка предупреждения и т.д.), которым выдают предупреждение в модули 158, 160 управления устройствами складывающихся законцовок о том, что приводная система устройств 154, 156 складывающихся законцовок приведена в действие и/или отключена. Например, устройство 234 приведения в действие приводной системы устройств складывающихся законцовок выполнено с возможностью установки флажка приведения в действие приводной системы устройств складывающихся законцовок, для обеспечения возможности мониторинга и/или управления приводной системой устройств 154, 156 складывающихся законцовок посредством модулей 158, 160 управления устройствами складывающихся законцовок.
[0067] В некоторых примерах, когда устройство 234 приведения в действие приводной системы устройств складывающихся законцовок приводит в действие приводную систему устройств складывающихся законцовок, модули 158, 160 управления устройствами складывающихся законцовок получают разрешение на выполнение множества действий. Например, когда устройство 234 приведения в действие приводной системы устройств складывающихся законцовок приводит в действие приводную систему устройств 154, 156 складывающихся законцовок (например, посредством установки флажка приведения в действие приводной системы устройств складывающихся законцовок), модули 158, 160 управления устройствами складывающихся законцовок могут исполнить функцию, такую как привод компонента приводной системы устройств складывающихся законцовок (например, привод соленоида, привод серводвигателя, привод клапана и т.д.), с приведением в действие подсистемы приводной системы устройств складывающихся законцовок (например, с приведением в действие электрической системы, с приведением в действие гидравлической системы, с приведением в действие пневматической системы и т.д.) и т.д. В некоторых случаях модули 158, 160 управления устройствами складывающихся законцовок не могут выполнять мониторинг приводной системы устройств складывающихся законцовок и/или управлять приводной системой устройств складывающихся законцовок без приведения в действие устройством 234 приводной системы устройств складывающихся законцовок. Например, если устройство 234 приведения в действие приводной системы устройств складывающихся законцовок не устанавливает флажок приведения в действие приводной системы устройств складывающихся законцовок для устройств 154, 156 складывающихся законцовок, модули 158, 160 управления устройствами складывающихся законцовок не могут получить разрешение на мониторинг приводной системы устройств 154, 156 складывающихся законцовок и/или управление приводной системой устройств 154, 156 складывающихся законцовок.
[0068] Модуль 230 приведения в действие системы по ФИГ. 2А и 2В дополнительно включает в себя устройство 236 приведения в действие удаленного электронного блока. Например, устройство 236 приведения в действие удаленного электронного блока выполнено с возможностью приведения в действие удаленных электронных блоков 168, 170 по ФИГ. 1. В некоторых примерах устройство 236 приведения в действие удаленного электронного блока выполнено с возможностью установки флажка (например, флажка приведения в действие, флажка предупреждения и т.д.), которым выдают предупреждение в модули 158, 160 управления устройствами складывающихся законцовок о том, что удаленные электронные блоки 168, 170 приведены в действие и/или отключены. Например, устройство 236 приведения в действие удаленного электронного блока выполнено с возможностью установки флажка приведения в действие удаленного электронного блока для обеспечения возможности мониторинга и/или управления удаленными электронными блоками 168, 170 посредством модулей 158, 160 управления устройствами складывающихся законцовок. В некоторых примерах приведение в действие удаленного электронного блока обуславливает приведение в действие удаленного электронного блока для реализации функции, такой как, например, привод компонента приводной системы складывающихся законцовок (например, привод соленоида, привод серводвигателя и т.д.) с приведением в действие подсистемы приводной системы складывающихся законцовок (например, с приведением в действие электрической системы, с приведением в действие гидравлической системы, с приведением в действие пневматической системы и т.д.), получением информации датчиков и т.д.
[0069] В некоторых примерах, если устройство 236 приведения в действие удаленного электронного блока приводит в действие удаленные электронные блоки 168,170, модули 158, 160 управления устройствами складывающихся законцовок получают разрешение на выполнение множества действий. Например, если устройство 236 приведения в действие удаленного электронного блока приводит в действие удаленные электронные блоки 168, 170 (например, посредством установки флажка приведения в действие удаленного электронного блока для удаленных электронных блоков 168, 170), модули 158, 160 управления устройствами складывающихся законцовок могут исполнить функцию, такую как привод компонента устройств 154,156 складывающихся законцовок (например, фиксацию основного фиксатора, выдвижение стопорного штифта и т.д.) посредством удаленных электронных блоков 168, 170. В некоторых случаях модули 158, 160 управления устройствами складывающихся законцовок не могут выполнять мониторинг удаленных электронных блоков 168, 170 и/или управлять удаленными электронными блоками 168,170 без приведения в действие устройством 236 удаленных электронных блоков 168, 170. Например, если устройство 236 приведения в действие удаленного электронного блока не устанавливает флажок приведения в действие удаленного электронного блока для удаленных электронных блоков 168, 170, модули 158, 160 управления устройствами складывающихся законцовок не могут получить разрешение на мониторинг удаленных электронных блоков 168, 170 и/или управление удаленными электронными блоками 168,170.
[0070] Модуль 230 приведения в действие системы по ФИГ. 2А и 2В также включает в себя устройство 238 приведения в действие компонентов для приведения в действие одного или более компонентов устройства складывающихся законцовок. Например, устройство 238 приведения в действие компонентов выполнено с возможностью приведения в действие одного или более компонентов устройств 154, 156 складывающихся законцовок по ФИГ. 1. Компонент устройств 154, 156 складывающихся законцовок может включать в себя, например, привод, двигатель, соленоид, клапан и т.д. Указанный компонент также может включать в себя компоненты устройств складывающихся законцовок, такие как, например, стопор развертывания, стопорный штифт, фиксатор (например, основной фиксатор, вспомогательный фиксатор и т.д.) и т.д. Например, указанный компонент может представлять собой основной фиксатор устройств 154, 156 складывающихся законцовок. Компонент устройства складывающихся законцовок может включать в себя датчик, который получает показание и/или информацию о состоянии компонента. В некоторых примерах устройство 238 приведения в действие компонентов выполнено с возможностью приведения в действие указанного компонента на основании показания датчика. Например, устройство 238 приведения в действие компонентов выполнено с возможностью приведения в действие гидравлического двигателя на основании показания, полученного от датчика гидравлического давления, которое удовлетворяет пороговому значению (например, показания датчика гидравлического давления, которое больше 500 фунтов на квадратный дюйм (34,47 гПа)). В некоторых примерах устройство 238 приведения в действие компонентов выполнено с возможностью установки флажка (например, флажка приведения в действие, флажка предупреждения и т.д.), которым выдают предупреждение в модули 158, 160 управления устройствами складывающихся законцовок о том, что указанные один или более компонентов приведены в действие. Например, устройство 238 приведения в действие компонентов выполнено с возможностью установки флажка приведения в действие компонента для обеспечения возможности мониторинга и/или управления указанным компонентом посредством модулей 158, 160 управления устройствами складывающихся законцовок.
[0071] В некоторых примерах, если устройство 238 приведения в действие компонентов приводит в действие указанный компонент, модули 158, 160 управления устройствами складывающихся законцовок получают разрешение на выполнение множества действий. Например, если устройство 238 приведения в действие компонентов приводит в действие указанный компонент, модули 158, 160 управления устройствами складывающихся законцовок могут выполнить действие, такое как привод компонента устройств 154, 156 складывающихся законцовок (например, открытие клапана, фиксацию основного фиксатора, выдвижение стопорного штифта и т.д.). В другом примере, если устройство 238 приведения в действие компонентов приводит в действие указанный компонент, модули 158, 160 управления устройствами складывающихся законцовок выполнены с возможностью получения информации от датчика, выполняющего мониторинг указанного компонента. Например, если устройство 238 приведения в действие компонентов приводит в действие указанный компонент, модули 158, 160 управления устройствами складывающихся законцовок могут получать информацию от датчика скорости, выполняющего мониторинга скорости гидравлического двигателя устройств 154, 156 складывающихся законцовок. В некоторых случаях модули 158, 160 управления устройствами складывающихся законцовок не могут выполнять мониторинг указанного компонента и/или управлять указанным компонентом без приведения в действие устройством 238 приведения в действие указанного компонента. Например, если устройство 238 приведения в действие компонентов не устанавливает флажок приведения в действие компонента серводвигателя, модули 158, 160 управления устройствами складывающихся законцовок не могут получить разрешение на мониторинг и/или управление серводвигателем.
[0072] Модуль 240 мониторинга и оповещения по ФИГ. 2А и 2В включает в себя приведенные в качестве примера классификатор 242 нереагирующего состояния, устройство 244 выработки предупреждений, устройство 246 управления предупреждениями и устройство 248 предоставления информации для пользовательского интерфейса. Модуль 240 мониторинга и оповещения включает в себя классификатор 242 нереагирующего состояния для классификации нереагирующего состояния компонента. Например, классификатор 242 нереагирующего состояния выполнен с возможностью классификации нереагирующего состояния пневмопривода для устройств 154, 156 складывающихся законцовок по ФИГ. 1. В некоторых примерах классификатор 242 нереагирующего состояния получает информацию об одном или более состояниях отсутствия реагирования из базы данных 270. В некоторых случаях классификатор 242 нереагирующего состояния выбирает нереагирующее состояние для классификации и/или для обработки из множества полученных состояний отсутствия реагирования.
[0073] В некоторых примерах классификатор 242 нереагирующего состояния классифицирует нереагирующее состояние как изолированную или системную проблему. Например, классификатор 242 нереагирующего состояния выполнен с возможностью получения информации о нереагирующем состоянии первого компонента (например, пневмопривода). Классификатор 242 нереагирующего состояния выполнен с возможностью последующего получения информации о состоянии второго компонента (например, датчика давления воздуха, при этом второй компонент связан с первым компонентом (например, датчик давления воздуха выполняет мониторинг пневмопривода). Если второй компонент также выдает информацию о наличии нереагирующего состояния, классификатор 242 нереагирующего состояния может классифицировать нереагирующее состояние первого компонента как системную проблему, поскольку первый компонент и второй компонент имеют нереагирующее состояние. Например, пневмопривод может быть нереагирующим, поскольку давление воздуха, измеренное датчиком давления воздуха, ниже достаточного уровня, необходимого для приведения в действие пневмопривода. Если второй компонент не выдает информации о наличии нереагирующего состояния, классификатор 242 нереагирующего состояния может классифицировать нереагирующее состояние первого компонента как изолированную проблему первого компонента. Например, измеренное давление воздуха может быть на уровне, достаточном для приведения в действие пневмопривода. Пневмопривод может быть нереагирующим вследствие другой проблемы (например, пневматический клапан не открыт для подачи воздуха на пневмопривод).
[0074] В некоторых примерах классификатор 242 нереагирующего состояния определяет, могут ли быть сглажены последствия нереагирующего состояния компонента и/или системы. Например, классификатор 242 нереагирующего состояния выполнен с возможностью определения, что компонент устройств 154, 156 складывающихся законцовок может быть обойден, если указанный компонент имеет нереагирующее состояние. В некоторых примерах классификатор 242 нереагирующего состояния определяет, что указанный компонент, находящийся в нереагирующем состоянии, имеет один или более резервных компонентов. Например, классификатор 242 нереагирующего состояния выполнен с возможностью определения, что датчик гидравлического давления, выполняющий мониторинг гидравлического клапана, находится в нереагирующем состоянии. Классификатор 242 нереагирующего состояния выполнен с возможностью определения наличия по меньшей мере одного дополнительного датчика гидравлического давления, выполняющего мониторинг гидравлического клапана, который не находится в нереагирующем состоянии. При определении наличия резервного компонента классификатор 242 нереагирующего состояния может предупреждать модули 158, 160 управления устройствами складывающихся законцовок о том, что последствия нереагирующего состояния компонента могут быть сглажены. Например, классификатор 242 нереагирующего состояния выполнен с возможностью установки флажка (например, флажка обхода, флажка резервного компонента, флажка сглаживания последствий и т.д.), выдающего предупреждение в модули 158, 160 управления устройствами складывающихся законцовок о том, что компонент в нереагирующем состоянии может быть обойден.
[0075] Модуль 240 мониторинга и оповещения по ФИГ. 2А и 2В включает в себя устройство 244 выработки предупреждений для выработки предупреждения на основании информации, полученной от модуля 200 сбора и/или из базы данных 270. В некоторых примерах устройство 244 выработки предупреждений выполнено с возможностью оценки информации и определения, удовлетворяет ли информация пороговому значению. Пороговое значение может быть вычисленным значением, заданным значением и т.д. Например, устройство 244 выработки предупреждений выполнено с возможностью определения, что показание датчика гидравлического давления не удовлетворяет пороговому значению гидравлического давления (например, показание меньше порогового значения гидравлического давления). Показание, не удовлетворяющее пороговому значению гидравлического давления, может указывать на то, что гидравлический привод, мониторинг которого выполняет датчик гидравлического давления, не является реагирующим, и что гидравлический двигатель, мониторинг которого выполняет датчик гидравлического давления, не является реагирующими и т.д.
[0076] В некоторых примерах устройство 244 выработки предупреждений определяет, что информация о состоянии от компонента и/или системы требует выработки предупреждения. Например, устройство 244 выработки предупреждений выполнено с возможностью определения, что состояние, информация о котором получена от соленоида с электроприводом, является нереагирующим состоянием и, таким образом, требует выработки предупреждения. Устройство 244 выработки предупреждений выполнено с возможностью получения информации о состоянии соленоида с электроприводом от модуля 200 сбора и/или из базы данных 270. В некоторых примерах устройство 244 выработки предупреждений присваивает коэффициент и/или приоритет выработанному предупреждению. Например, коэффициент может представлять собой коэффициент критичности, который обозначает уровень важности для компонента и/или системы, упомянутых в выработанном предупреждении. При установлении состояния, требующего выработки предупреждения (например, показания, удовлетворяющего пороговому значению, изменения состояния компонента и/или системы и т.д.), устройство 244 выработки предупреждений может вырабатывать предупреждение, такое как, например, отображение предупреждения на пользовательском интерфейсе, распространение сообщения о предупреждениях по сети управления процессами, создания журнала регистрации предупреждений и/или сообщения о предупреждениях и т.д.
[0077] Модуль 240 мониторинга и оповещения по ФИГ. 2А и 2В включает в себя устройство 246 управления предупреждениями для управления предупреждениями, вырабатываемыми устройством 244 выработки предупреждений. В некоторых примерах устройство 246 управления предупреждениями обрабатывает выработанные предупреждения путем составления их в виде списка, журнала, сообщения и т.д. Например, устройство 246 управления предупреждениями выполнено с возможностью сбора указанного множества выработанных предупреждений и упорядочивания их с получением сообщения о предупреждениях. Сообщение о предупреждениях может включать в себя информацию относительно отдельных предупреждений, такую как, например, метка времени, коэффициент, приоритет, описание на основе текста, категорию предупреждения и т.д. В некоторых случаях сообщение о предупреждениях включает в себя информацию относительно анализа тенденции изменения повторяющихся предупреждений. Например, сообщение о предупреждениях может указывать на то, что предупреждение о нереагирующем пневмоприводе возникает каждый раз, когда приведены в действие устройства 154, 156 складывающихся законцовок, или когда летательный аппарат достигает высоты более 10 000 футов (3 048 м). В некоторых примерах устройство 246 управления предупреждениями может быть доступно из пользовательского интерфейса. Например, устройство 246 управления предупреждениями может представлять собой вспомогательный дисплей, подмодуль и т.д. человеко-машинного интерфейса (human machine interface, HMD в кабине экипажа. Пилот в кабине экипажа может взаимодействовать с устройством 246 управления предупреждениями посредством интерфейса HMI, при этом пилот может подтвердить предупреждение, отклонить предупреждение, выполнить действие на основании предупреждения, просмотреть сообщение о предупреждениях, просмотреть анализ тенденции изменения предупреждений и т.д.
[0078] Модуль 240 мониторинга и оповещения по ФИГ. 2А и 2В включает в себя устройство 248 предоставления информации для пользовательского интерфейса для обработки, упаковки и выдачи информации в пользовательский интерфейс, связанный с устройством складывающихся законцовок. Например, устройство 248 предоставления информации для пользовательского интерфейса выполнено с возможностью получения и передачи информации в пользовательский интерфейс, связанный с устройствами 154, 156 складывающихся законцовок по ФИГ. 1. Информация может включать в себя информацию об этапе и/или действии, относящуюся к работе устройств складывающихся законцовок, состоянию компонента и/или системы, относящегося или относящейся к устройству складывающихся законцовок, предупреждение, вырабатываемое модулем мониторинга и оповещения и т.д. В некоторых примерах устройство 248 предоставления информации для пользовательского интерфейса присваивает значение, связанное с состоянием компонента и/или состоянием системы, переменной, связанной с пользовательским интерфейсом. В некоторых случаях устройство 248 предоставления информации для пользовательского интерфейса назначает информацию, относящуюся к выработанному предупреждению, переменной, связанной с пользовательским интерфейсом. В некоторых примерах переменные могут быть отображены и/или зарегистрированы на пользовательском интерфейсе. Например, устройство 248 предоставления информации для пользовательского интерфейса выполнено с возможностью присваивания показания, полученного от датчика гидравлического давления, переменной, связанной с пользовательским интерфейсом. Переменная может быть передана в пользовательский интерфейс посредством сети 294. Переменная может быть сохранена в базе данных 270 и получена пользовательским интерфейсом из базы данных 270.
[0079] Модуль 250 работы с последовательностью и управления по ФИГ. 2А и 2В включает в себя приведенные в качестве примера устройство 252 задания последовательности нормальной работы складывающихся законцовок, устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования, устройство 256 оценки состояния и контроллер 258 складывающихся законцовок. Модуль 250 работы с последовательностью и управления включает в себя устройство 252 задания последовательности нормальной работы складывающихся законцовок для определения последовательности нормальной работы для этапов работы складывающихся законцовок и/или действий со складывающимися законцовками для изменения положения подвижных поверхностей 134, 136. В некоторых примерах устройство 252 задания последовательности нормальной работы складывающихся законцовок определяет последовательность для нормальной работы на основании показания датчика, состояния компонента, состояния системы и т.д. Например, устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью определения последовательности для нормальной работы на основании показания датчика, которое удовлетворяет пороговому значению (например, достаточному пороговому значению, удовлетворительному пороговому значению, необходимому пороговому значению и т.д.). В другом примере устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью определения последовательности для нормальной работы на основании состояния компонента и/или состояния системы, причем указанные состояния не обозначают нереагирующее состояние.
[0080] В некоторых примерах устройство 252 задания последовательности нормальной работы складывающихся законцовок устанавливает один или более этапов работы складывающихся законцовок для выполнения перемещения подвижных поверхностей 134, 136 на основании полученной информации (например, входной информации из кабины экипажа, информации об этапе полета и т.д.). В некоторых примерах устройство 252 задания последовательности нормальной работы складывающихся законцовок устанавливает этапы работы складывающихся законцовок перед выполнением первого этапа работы складывающихся законцовок. Например, устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью определения существования трех этапов работы складывающихся законцовок, которые необходимо выполнить для перемещения подвижных поверхностей 134, 136 из выдвинутых положений 142, 144 в сложенные положения 146, 148. В некоторых случаях устройство 252 задания последовательности нормальной работы складывающихся законцовок определяет действия со складывающимися законцовками, которые будут выполнены во время каждого из определенных этапов работы складывающихся законцовок перед выполнением первого этапа их работы. Например, устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью определения наличия трех этапов работы складывающихся законцовок и четырех действий со складывающимися законцовками во время каждого из трех этапов работы складывающихся законцовок, которые необходимо выполнить для перемещения подвижных поверхностей 134, 136 из выдвинутых положений 142, 144 в сложенные положения 146, 148. В некоторых примерах устройство 252 задания последовательности нормальной работы складывающихся законцовок вычисляет и/или устанавливает необходимое положение устройства складывающихся законцовок на основании полученной информации. Например, устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью вычисления необходимого положения подвижной поверхности 134 устройства 154 складывающейся законцовки на основании полученной информации об этапе полета летательного аппарата 100. Устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью выработки одного или более этапов и/или действий для вызова перемещения подвижной поверхности 134 устройства 154 складывающейся законцовки в необходимое положение из текущего положения подвижной поверхности 134.
[0081] В некоторых примерах устройство 252 задания последовательности нормальной работы складывающихся законцовок получает и оценивает информацию перед выполнением этапа работы складывающихся законцовок или действия со складывающимися законцовками во время указанного этапа работы складывающихся законцовок. Устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью установления первого действия со складывающимися законцовками во время первого этапа работы складывающихся законцовок. Например, устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью определения первого действия со складывающимися законцовками (например, открытия запорного клапана) во время первого этапа работы складывающихся законцовок в виде регулировки положения подвижных поверхностей 134, 136 по ФИГ. 1 с переходом из выдвинутых положений 142, 144 в сложенные положения 146, 148. Например, устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью получения информации, относящейся к первому действию со складывающимися законцовками, такой как, например, информация об этапе полета, информация о состоянии складывающихся законцовок и т.д., для определения возможности перемещения подвижных поверхностей 134, 136 на основании полученной информации. В дополнительном или альтернативном варианте реализации изобретения устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью получения и оценки информации во время и/или после выполнения этапа работы складывающихся законцовок или действия со складывающимися законцовками во время указанного этапа работы складывающихся законцовок.
[0082] В некоторых примерах устройство 252 задания последовательности нормальной работы складывающихся законцовок получает информацию относительно компонентов и/или систем, участвующих в выполнении первого действия со складывающимися законцовками, перед первым действием со складывающимися законцовками. Например, если первое действие со складывающимися законцовками заключается в расфиксации основного фиксатора устройств 154, 156 складывающихся законцовок с использованием гидравлического привода, устройство 252 задания последовательности нормальной работы складывающихся законцовок может получить информацию о приведении в действие гидравлического привода, показании датчика гидравлического давления, выполняющего мониторинг гидравлического привода и т.д., перед первым действием со складывающимися законцовками. Устройство 252 задания последовательности нормальной работы складывающихся законцовок может вызывать выполнение первого действия со складывающимися законцовками, когда определено, что состояние компонента и/или системы устройств 154, 156 складывающихся законцовок перед первым действием со складывающимися законцовками является реагирующим. Например, устройство 252 задания последовательности нормальной работы складывающихся законцовок может вызывать выработку, передачу, исполнение команды и т.д. для выполнения первого действия со складывающимися законцовками. В некоторых примерах устройство 252 задания последовательности нормальной работы складывающихся законцовок устанавливает и/или выполняет второе действие со складывающимися законцовками на основании завершения первого действия со складывающимися законцовками. Завершение первого действия со складывающимися законцовками может быть определено посредством показания датчика. Например, второе действие со складывающимися законцовками не может быть выполнено до тех пор, пока показание датчика не укажет на завершение выполнения первого действия со складывающимися законцовками. В некоторых случаях устройство 252 задания последовательности нормальной работы складывающихся законцовок устанавливает и/или выполняет второй этап работы складывающихся законцовок на основании завершения выполнения первого действия со складывающимися законцовками. В дополнительном или альтернативном варианте реализации изобретения устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью получения информации относительно компонентов и/или систем, участвующих в выполнении первого действия со складывающимися законцовками, во время и/или после первого действия со складывающимися законцовками.
[0083] Модуль 250 работы с последовательностью и управления по ФИГ. 2А и 2В включает в себя устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования для определения последовательности, исполняемой при отсутствии реагирования, этапов работы складывающихся законцовок и/или действий со складывающимися законцовками. В некоторых примерах устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования определяет последовательность при отсутствии реагирования на основании нереагирующего состояния компонента и/или системы. Например, устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования выполнено с возможностью определения последовательности при отсутствии реагирования на основании нереагирующего состояния компонента и/или системы устройств 154, 156 складывающихся законцовок. В некоторых примерах нереагирующее состояние указывает на то, что этап работы складывающихся законцовок и/или действие со складывающимися законцовками не могут быть выполнены. Например, нереагирующее состояние гидравлического привода, функционально соединенного со стопорным штифтом, указывает на то, что отвод стопорного штифта не может быть выполнен.
[0084] В некоторых примерах устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования устанавливает последовательность, исполняемую при отсутствии реагирования, одного или более этапов работы складывающихся законцовок и/или действий со складывающимися законцовками, когда состоянием компонента и/или состоянием системы является нереагирующее состояние. В некоторых случаях устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования определяет последовательность, исполняемую при отсутствии реагирования, этапов работы складывающихся законцовок и соответствующих действий со складывающимися законцовками для перемещения подвижных поверхностей 134, 136 в промежуточное положение. Например, устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования выполнено с возможностью определения последовательности, исполняемой при отсутствии реагирования, этапов работы складывающихся законцовок и соответствующих действий со складывающимися законцовками для перемещения подвижных поверхностей 134, 136 из выдвинутых положений 142, 144 в положение между выдвинутыми положениями 142, 144 и сложенными положениями 146, 148. В некоторых примерах устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования определяет выполняемую при отсутствии реагирования последовательность этапов работы складывающихся законцовок и/или действий со складывающимися законцовками для того, чтобы оставить на месте устройство складывающихся законцовок. Например, устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования выполнено с возможностью определения выполняемой при отсутствии реагирования последовательности этапов работы складывающихся законцовок и/или действий со складывающимися законцовками для того, чтобы оставить подвижные поверхности 134, 136 в сложенных положениях 146, 148. В другом примере устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования выполнено с возможностью получения информации о нереагирующем состоянии от гидравлического привода, необходимой для перемещения подвижных поверхностей 134, 136 из сложенных положений 146, 148 в выдвинутые положения 142, 144. При получение информации о нереагирующем состоянии от гидравлического привода, устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования выполнено с возможностью определения этапов работы складывающихся законцовок и/или действий со складывающимися законцовками, необходимых для поддержания подвижных поверхностей 134,136 в сложенных положениях 146, 148.
[0085] В некоторых примерах устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования вычисляет и/или устанавливает необходимое положение устройств 154, 156 складывающихся законцовок на основании полученной информации. Необходимое положение может, например, представлять собой выдвинутые положения 142, 144 по ФИГ. 1 или положение между выдвинутыми положениями 142, 144 и сложенными положениями 146, 148 по ФИГ. 1. В некоторых случаях устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования устанавливает, что необходимым положением подвижных поверхностей 134, 136 является их текущее положение. Например, устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования выполнено с возможностью установления, что необходимым положением подвижных поверхностей 134, 136 по ФИГ. 1 является их сложенное положение 146, 148. Например, устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования выполнено с возможностью вычисления необходимого положения подвижных поверхностей 134, 136 устройств 154, 156 складывающихся законцовок на основании состояния нереагирующего компонента. Устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью выработки одного или более этапов и/или действий для обуславливания перемещения подвижных поверхностей 134, 136 устройств 154, 156 складывающихся законцовок в необходимое положение от текущего положения подвижных поверхностей 134, 136.
[0086] Модуль 250 работы с последовательностью и управления по ФИГ. 2А и 2В включает в себя устройство 256 оценки состояния для оценки состояния компонента и/или системы устройства складывающихся законцовок. Например, устройство 256 оценки состояния выполнено с возможностью оценки состояния компонента и/или системы устройств 154, 156 складывающихся законцовок по ФИГ. 1. В некоторых примерах устройство 256 оценки состояния получает состояние компонента из базы данных 270. Например, устройство 256 оценки состояния выполнено с возможностью получения информации о состоянии пневмопривода устройства 154 складывающейся законцовки из базы данных 270. Устройство 256 оценки состояния выполнено с возможностью оценки состояния пневмопривода и определения того, является ли это состояние состоянием нормальной работы или нереагирующим состоянием. В некоторых случаях устройство 256 оценки состояния получает информацию о состоянии системы. Например, устройство 256 оценки состояния выполнено с возможностью получения информации о состоянии пневматической системы устройства 154 складывающейся законцовки. Устройство 256 оценки состояния выполнено с возможностью оценки состояния пневматической системы и определения того, является ли это состояние состоянием нормальной работы или нереагирующим состоянием.
[0087] Модуль 250 работы с последовательностью и управления по ФИГ. 2А и 2В включает в себя контроллер 258 складывающихся законцовок для управления компонентом и/или системой устройства складывающихся законцовок. Например, контроллер 258 складывающихся законцовок выполнен с возможностью управления компонентом и/или системой устройств 154, 156 складывающихся законцовок по ФИГ. 1. В некоторых примерах контроллер 258 складывающихся законцовок вырабатывает команду. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выработки команды для устройства 154 складывающейся законцовки для перемещения подвижной поверхности 134 по ФИГ. 1 из сложенного положения 146 в выдвинутое положение 142. В некоторых примерах контроллер 258 складывающихся законцовок вырабатывает указанную команду на задействование блокировки. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выработки команды на задействование механической блокировки и/или программной блокировки. В некоторых случаях контроллер 258 складывающихся законцовок вырабатывает указанную команду на задействование блокировки на основании состояния компонента и/или системы. В некоторых примерах контроллер 258 складывающихся законцовок передает команду на удаленный электронный блок. Например, контроллер 258 складывающихся законцовок выполнен с возможностью передачи команды на удаленные электронные блоки 168,170 по ФИГ. 1.
[0088] В некоторых примерах контроллер 258 складывающихся законцовок исполняет последовательность команд в соответствии с этапами работы складывающихся законцовок и/или действиями со складывающимися законцовками, выработанными устройством 252 задания последовательности нормальной работы складывающихся законцовок или устройством 254 задания последовательности для складывающихся законцовок при отсутствии реагирования. В некоторых примерах контроллер 258 складывающихся законцовок исполняет последовательность команд для выполнения одного или более действий со складывающимися законцовками на основании состояния компонента и/или системы. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи первой команды в первый компонент устройства 154 складывающейся законцовки для выполнения первого действия со складывающимися законцовками во время первого этапа работы складывающихся законцовок. Контроллер 258 складывающихся законцовок выполнен с возможностью приема информации о состоянии первого компонента, указывающей на исполнение первой команды и ее успешное выполнение. Контроллер 258 складывающихся законцовок выполнен с возможностью определения, что первое действие со складывающимися законцовками выполнено, на основании состояния первого компонента. При определении выполнения первого действия со складывающимися законцовками контроллер 258 складывающихся законцовок может выдать вторую команду на второй компонент устройств 154, 156 складывающихся законцовок для совершения второго действия со складывающимися законцовками во время первого этапа работы складывающихся законцовок.
[0089] В некоторых примерах контроллер 258 складывающихся законцовок исполняет последовательность команд для выполнения одного или более этапов работы складывающихся законцовок на основании состояния компонента и/или системы. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи первой команды на компонент устройств 154, 156 складывающихся законцовок для выполнения первого действия со складывающимися законцовками во время первого этапа работы складывающихся законцовок. Контроллер 258 складывающихся законцовок выполнен с возможностью приема информации о состоянии компонента, указывающей на исполнение первой команды и ее успешное выполнение. Контроллер 258 складывающихся законцовок выполнен с возможностью определения, что первое действие со складывающимися законцовками выполнено, на основании состояния компонента. Контроллер 258 складывающихся законцовок также выполнен с возможностью определения, что первый этап работы складывающихся законцовок выполнен, на основании завершения первого действия со складывающимися законцовками. При определении, что выполнение первого этапа работы складывающихся законцовок завершено, контроллер 258 складывающихся законцовок может выдать вторую команду на компонент устройств 154, 156 складьтающихся законцовок для выполнения первого действия со складывающимися законцовками во время второго этапа работы складывающихся законцовок. В некоторых примерах контроллер 258 складывающихся законцовок устанавливает флажок (например, флажок завершения), когда этап работы складывающихся законцовок завершен и/или действие со складывающимися законцовками завершено.
[0090] Диспетчерский модуль 280 по ФИГ. 2А и 2В включает в себя приведенные в качестве примера перехватчик 282 команд, анализатор 284 устройства складывающихся законцовок, анализатор 286 этапов полета, устройство 288 для задействования режима технического обслуживания, устройство 290 защитной блокировки и передатчик 292 команд. Диспетчерский модуль 280 включает в себя перехватчик 282 команд для получения или перехвата команды, выдаваемых из модуля 250 работы с последовательностью и управления. В некоторых примерах перехватчик 282 команд получает указанную команду из базы данных 270. Например, модуль 250 работы с последовательностью и управления выполнен с возможностью выдачи команды и ее сохранения в базе данных 270. Перехватчик 282 команд выполнен с возможностью получения сохраненной команды из базы данных 270.
[0091] Диспетчерский модуль 280 по ФИГ. 2А и 2В включает в себя анализатор 284 устройства складывающихся законцовок для анализа устройства складывающихся законцовок и выработки одного или более правил на основании состояния компонента и/или системы устройства складывающихся законцовок. Например, анализатор 284 устройства складывающихся законцовок выполнен с возможностью выработки одного или более правил для устройств или состояний складывающихся законцовок на основании состояния компонента и/или системы устройств 154, 156 складывающихся законцовок по ФИГ. 1. Перовое приведенное в качестве примера правило для устройства складывающихся законцовок может включать в себя отсутствие отправки команды на компонент и/или систему, находящийся или находящуюся в нереагирующем состоянии. Таким образом, отправка команды на компонент, находящийся в нереагирующем состоянии, нарушает первое приведенное в качестве примера правило для устройства складывающихся законцовок. Второе приведенное в качестве примера правило для устройства складывающихся законцовок может включать в себя отсутствие отправки команды на компонент и/или систему, которые вместе или по отдельности не приведены в действие. Таким образом, отправка команды на компонент и/или систему, которые вместе или по отдельности не приведены в действие, нарушает второе приведенное в качестве примера правило для устройства складывающихся законцовок.
[0092] Третье приведенное в качестве примера правило для устройства складывающихся законцовок может включать в себя отсутствие отправки команды на компонент и/или систему, несовместимую с состоянием компонента и/или системы. Четвертое приведенное в качестве примера правило для устройства складывающихся законцовок может включать в себя отсутствие отправки команды на первый компонент и/или первую систему, несовместимой с состоянием второго компонента и/или второй системы, при этом первый компонент и первая система связаны со вторым компонентом и второй системой. Например, основной фиксатор устройства 154 складывающейся законцовки находится в положении фиксации, а подвижная поверхность 134 находится в выдвинутом положении 142. Выходящая электронная команда может быть предназначена для регулировки подвижной поверхности 134 с ее переводом в сложенное положение 146. Анализатор 284 устройства складывающихся законцовок выполнен с возможностью определения, что регулировка подвижной поверхности 134 с перемещением в сложенное положение 146 несовместима с основным фиксатором, находящимся в положении фиксации. Таким образом, анализатор 284 устройства складывающихся законцовок выполнен с возможностью определения, что выходящая электронная команда является нарушением четвертого приведенного в качестве примера правила для устройства складывающихся законцовок.
[0093] В некоторых примерах анализатор 284 устройства складывающихся законцовок снова вырабатывает правила для устройства складывающихся законцовок каждый цикл управления обработкой для модулей 158, 160 управления устройствами складывающихся законцовок. В некоторых случаях правило для устройства складывающихся законцовок может быть извлечено из базы данных 270. Например, анализатор 284 устройства складывающихся законцовок выполнен с возможностью извлечения правила для устройства складывающихся законцовок из базы данных 270 в начале цикла управления обработкой. В некоторых примерах анализатор 284 устройства складывающихся законцовок выполнен с возможностью сохранения правила для устройства складывающихся законцовок в базе данных 270. Например, анализатор 284 устройства складывающихся законцовок выполнен с возможностью сохранения правила для устройства складывающихся законцовок в базе данных 270 в конце цикла управления обработкой.
[0094] Диспетчерский модуль 280 по ФИГ. 2А и 2В включает в себя анализатор 286 этапов полета для анализа информации об этапе полета летательного аппарата и выработки одного или более правил на основании указанной информации об этапе полета. Например, анализатор 286 этапов полета выполнен с возможностью выработки одного или более правил для этапа полета на основании указанного этапа полета летательного аппарата 100 по ФИГ. 1. Первое приведенное в качестве примера правило для этапа полета может включать в себя отсутствие привода компонента и/или системы, когда этап полета указывает на то, что летательный аппарат находится в полете. Например, перемещение подвижной поверхности 134 по ФИГ. 1 из выдвинутого положения 142 в сложенное положение 146, когда этап полета указывает на то, что летательный аппарат находится в полете, является нарушением первого приведенного в качестве примера правила для этапа полета. Второе приведенное в качестве примера правило для этапа полета может включать в себя отсутствие привода компонента и/или системы, когда этап полета указывает на то, что летательный аппарат находится на стоянке возле выхода на посадку в аэропорту. Например, перемещение подвижной поверхности 134 из сложенного положения 146 в выдвинутое положение 142, когда этап полета указывает на то, что летательный аппарат находится на стоянке возле выхода на посадку в аэропорту, является нарушением второго приведенного в качестве примера правила для этапа полета.
[0095] В некоторых примерах анализатор 286 этапов полета снова вырабатывает правила для этапа полета на каждый цикл управления обработкой для модулей 158, 160 управления устройствами складывающихся законцовок. В некоторых случаях правило для этапа полета может быть извлечено из базы данных 270. Например, анализатор 286 этапов полета выполнен с возможностью извлечения указанного правила для этапа полета из базы данных 270 в начале цикла управления обработкой. В некоторых примерах анализатор 286 этапов полета выполнен с возможностью сохранения правила для устройства складывающихся законцовок в базе данных 270. Например, анализатор 286 этапов полета выполнен с возможностью сохранения указанного правила для этапа полета в базе данных 270 в конце цикла управления обработкой.
[0096] Диспетчерский модуль 280 по ФИГ. 2А и 2 В включает в себя устройство 288 для задействования режима технического обслуживания модуля управления складывающимися законцовками. Например, устройство 288 для задействования режима технического обслуживания выполнено с возможностью задействования режима (режимов) технического обслуживания устройств 154, 156 складывающихся законцовок по ФИГ. 1. В некоторых примерах техники работают с устройствами 154, 156 складывающихся законцовок в режиме (режимах) технического обслуживания или режиме (режимах) проверки для выполнения проверок компонентов и/или систем. Например, техники могут задействовать режим технического обслуживания путем воздействия на кнопку, ручку, переключатель и т.д., которые доступны технику для работы. Кнопка, ручка, переключатель и т.д. обеспечивают возможность установки флажка и/или предупреждения в устройстве 288 для задействования режима технического обслуживания. Устройство 288 для задействования режима технического обслуживания может обеспечивать для техника возможность работать с отдельными компонентами и/или отдельными системами устройств 154, 156 складывающихся законцовок. Например, устройство 288 для задействования режима технического обслуживания может обеспечивать для техника возможность выдачи специализированных выходящих электронных команд в компоненты и/или системы устройств 154,156 складывающихся законцовок.
[0097] В показанном примере по ФИГ. 2А и 2В диспетчерский модуль 280 включает в себя устройство 290 защитной блокировки для выдачи достоверных выходных электронных команд в устройства 154, 156 складывающихся законцовок. В некоторых примерах устройство 290 защитной блокировки задействует защитную блокировку (например, механическую блокировку, программную блокировку и т.д.) посредством изменения выходящей электронной команды. В некоторых случаях защитная блокировка не допускает возникновения действия (например, отмены команды, удаления команды и т.д.) или изменения этого действия (например, изменения указанной команды). В некоторых случаях выходящую электронную команду получают из базы данных 270. Например, модуль 250 работы с последовательностью и управления выполнен с возможностью выработки команды и сохранения указанной команды в базе данных 270. Устройство 290 защитной блокировки выполнено с возможностью получения указанной команды из базы данных 270 и определения, является ли указанная команда достоверной.
[0098] В некоторых примерах устройство 290 защитной блокировки изменяет выходящую электронную команду на основании нарушения правил, вырабатываемых и/или оцениваемых анализатором 284 устройства складывающихся законцовок, анализатором 286 этапов полета и т.д. Например, приводная гидравлическая система может быть не приведена в действие, и подвижные поверхности 134, 136 по ФИГ. 1 находятся в выдвинутом положении 142. Выходящая электронная команда может быть выполнена с возможностью управления приводной гидравлической системой для регулировки подвижных поверхностей 134, 136 с переходом из выдвинутых положений 142, 144 в сложенные положения 146, 148. При определении, что приводная гидравлическая система не приведена в действие, анализатор 284 устройства складывающихся законцовок выполнен с возможностью определения, что выходящая электронная команда нарушила правило для устройства складывающихся законцовок. При нарушении правила для устройства складывающихся законцовок устройство 290 защитной блокировки может изменить выходящую электронную команду для выдачи достоверной команды в компонент устройств 154, 156 складывающихся законцовок. Например, устройство 290 защитной блокировки выполнено с возможностью изменения выходных данных 298 модулей 158, 160 управления устройствами складывающихся законцовок для выдачи достоверной команды в компонент устройств 154, 156 складывающихся законцовок.
[0099] В некоторых примерах устройство 290 защитной блокировки выполнено с возможностью изменения выходящей электронной команды посредством замены значения выходящей электронной команды нулевым значением или нулевым символом. В некоторых случаях устройство 290 защитной блокировки выполнено с возможностью изменения выходящей электронной команды посредством замены значения выходящей электронной команды сохраненным значением по умолчанию. Например, устройство 290 защитной блокировки выполнено с возможностью замены значения выходящей электронной команды сохраненным значением по умолчанию, полученным из базы данных 270 посредством сети 294. В некоторых случаях устройство 290 защитной блокировки выполнено с возможностью установки флажка (например, флажка нарушения правил, флажка недостоверных входных данных, флажка предупреждения и т.д.), которым выдают предупреждение в модули 158, 160 управления устройствами складывающихся законцовок о том, что выходящая электронная команда является недостоверной. Например, устройство 290 защитной блокировки выполнено с возможностью установки флажка нарушения правил, когда выходящая электронная команда нарушает одно или более правил, вырабатываемых анализатором 284 устройства складывающихся законцовок, анализатором 286 этапов полета и т.д.
[00100] В некоторых примерах диспетчерский модуль 280 по ФИГ. 2А и 2В может включать в себя устройство 290 защитной блокировки для изменения выходящей электронной команды для поверхности управления летательного аппарата. Например, устройство 290 защитной блокировки выполнено с возможностью изменения выходящей электронной команды для поверхности управления летательного аппарата посредством замены значения выходящей электронной команды нулевым значением или нулевым символом. В некоторых случаях устройство 290 защитной блокировки выполнено с возможностью изменения выходящей электронной команды посредством замены значения выходящей электронной команды для поверхности управления летательного аппарата сохраненным значением по умолчанию. Например, устройство 290 защитной блокировки выполнено с возможностью замены значения выходящей электронной команды для поверхности управления летательного аппарата сохраненным значением по умолчанию, полученным из базы данных 270 посредством сети 294. В некоторых случаях устройство 290 защитной блокировки выполнено с возможностью установки флажка (например, флажка нарушения правил, флажка недостоверных входных данных, флажка недостоверных выходных данных, флажка предупреждения и т.д.), которым выдают предупреждение в модули 158, 160 управления устройствами складывающихся законцовок или систему управления процессами летательного аппарата о том, что выходящая электронная команда является недостоверной.
[00101] Диспетчерский модуль 280 по ФИГ. 2А и 2В включает в себя передатчик 292 команд для выдачи команды, вырабатываемой и/или обрабатываемой, из модулей 158, 160 управления устройствами складывающихся законцовок. В некоторых примерах передатчик 292 команд выдает измененную команду или неизмененную команду. Например, передатчик 292 команд выполнен с возможностью передачи измененной команды или неизмененной команды в качестве выходных данных 298. В некоторых примерах передатчик 292 команд передает команду на удаленный электронный блок (remote electronics unit, REU). Например, передатчик 292 команд выполнен с возможностью передачи команды на удаленные электронные блоки 168, 170 по ФИГ. 1. В некоторых примерах модули 158, 160 управления устройствами складывающихся законцовок управляют компонентом и/или системой устройства складывающихся законцовок, соединенным или соединенной с удаленными электронными блоками 168, 170 посредством передатчика 292 команд. Например, передатчик 292 команд выполнен с возможностью ретранслирования или передачи команды, вырабатываемой контроллером 258 складывающихся законцовок, на удаленные электронные блоки 168,170.
[00102] Хотя на ФИГ. 2А и 2В показаны примеры реализации приведенных в качестве примера модулей 158, 160 управления устройствами складывающихся законцовок по ФИГ. 1, один или более элементов, процессов и/или устройств, показанных на ФИГ. 2А и 2В, могут быть скомбинированы, разделены, перегруппированы, не использованы, удалены и/или реализованы любым другим способом. Кроме того, приведенные в качестве примеров устройства: модуль 200 сбора, сетевой интерфейс 202, интерфейс 204 датчиков, устройство 206 обработки информации, устройство 208 проверки достоверности информации, регистрационный модуль 210, устройство 212 регистрации входных данных, поступающих из кабины экипажа, устройство 214 регистрации этапов полета, устройство регистрации 216 состояния складывающихся законцовок, устройство 218 регистрации состояния стопоров складывающихся законцовок, устройство 220 регистрации состояния фиксаторов складывающихся законцовок, модуль 230 приведения в действие системы, устройство 232 приведения в действие устройств складывающихся законцовок, устройство 234 приведения в действие приводной системы устройств складывающихся законцовок, устройство 236 приведения в действие удаленного электронного блока, устройство 238 приведения в действие компонентов, модуль 240 мониторинга и оповещения, классификатор 242 нереагирующего состояния, устройство 244 выработки предупреждений, устройство 246 управления предупреждениями, устройство 248 предоставления информации для пользовательского интерфейса, модуль 250 работы с последовательностью и управления, устройство 252 задания последовательности нормальной работы складывающихся законцовок, устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования, устройство 256 оценки состояния, контроллер 258 складывающихся законцовок, база данных 270, диспетчерский модуль 280, перехватчик 282 команд, анализатор 284 устройства складывающихся законцовок, анализатор 286 этапов полета, устройство 288 для задействования режима технического обслуживания, устройство 290 защитной блокировки, передатчик 292 команд и/или, в целом, модули 158, 160 управления устройствами складывающихся законцовок по ФИГ. 2А и 2В, - могут быть реализованы с помощью аппаратных средств, программного обеспечения, прошивки и/или любой комбинации аппаратных средств, программного обеспечения и/или прошивки. Так, например, любые из следующих приведенных в качестве примеров устройств: модуль 200 сбора, сетевой интерфейс 202, интерфейс 204 датчиков, устройство 206 обработки информации, устройство 208 проверки достоверности информации, регистрационный модуль 210, устройство 212 регистрации входных данных, поступающих из кабины экипажа, устройство 214 регистрации этапов полета, устройство регистрации 216 состояния складывающихся законцовок, устройство 218 регистрации состояния стопоров складывающихся законцовок, устройство 220 регистрации состояния фиксаторов складывающихся законцовок, модуль 230 приведения в действие системы, устройство 232 приведения в действие устройств складывающихся законцовок, устройство 234 приведения в действие приводной системы устройств складывающихся законцовок, устройство 236 приведения в действие удаленного электронного блока, устройство 238 приведения в действие компонентов, модуль 240 мониторинга и оповещения, классификатор 242 нереагирующего состояния, устройство 244 выработки предупреждений, устройство 246 управления предупреждениями, устройство 248 предоставления информации для пользовательского интерфейса, модуль 250 работы с последовательностью и управления, устройство 252 задания последовательности нормальной работы складывающихся законцовок, устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования, устройство 256 оценки состояния, контроллер 258 складывающихся законцовок, база данных 270, диспетчерский модуль 280, перехватчик 282 команд, анализатор 284 устройства складывающихся законцовок, анализатор 286 этапов полета, устройство 288 для задействования режима технического обслуживания, устройство 290 защитной блокировки, передатчик 292 команд и/или, в целом, модули 158, 160 управления устройствами складывающихся законцовок по ФИГ. 2А и 2В, - могут быть реализованы посредством одной или более аналоговых или цифровых схем, логических схем, программируемого процессора (программируемых процессоров), специализированной интегральной схемы (специализированных интегральных схем) (application specific integrated circuit, ASIC), программируемого логического устройства (программируемых логических устройств) (programmable logic device, PLD) и/или программируемой логической интегральной схемы (программируемых логических интегральных схем) (field programmable logic device, FPLD).
При рассмотрении пунктов формулы настоящего патента, относящихся к любым устройствам или системам с охватом реализации только в программном обеспечении и/или прошивке, в настоящем документе ясно выражается, что по меньшей мере одно из приведенных в качестве примеров устройств: модуль 200 сбора, сетевой интерфейс 202, интерфейс 204 датчиков, устройство 206 обработки информации, устройство 208 проверки достоверности информации, регистрационный модуль 210, устройство 212 регистрации входных данных, поступающих из кабины экипажа, устройство 214 регистрации этапов полета, устройство регистрации 216 состояния складывающихся законцовок, устройство 218 регистрации состояния стопоров складывающихся законцовок, устройство 220 регистрации состояния фиксаторов складывающихся законцовок, модуль 230 приведения в действие системы, устройство 232 приведения в действие устройств складывающихся законцовок, устройство 234 приведения в действие приводной системы устройств складывающихся законцовок, устройство 236 приведения в действие удаленного электронного блока, устройство 238 приведения в действие компонентов, модуль 240 мониторинга и оповещения, классификатор 242 нереагирующего состояния, устройство 244 выработки предупреждений, устройство 246 управления предупреждениями, устройство 248 предоставления информации для пользовательского интерфейса, модуль 250 работы с последовательностью и управления, устройство 252 задания последовательности нормальной работы складывающихся законцовок, устройство 254 задания последовательности для складывающихся законцовок при отсутствии реагирования, устройство 256 оценки состояния, контроллер 258 складывающихся законцовок, база данных 270, диспетчерский модуль 280, перехватчик 282 команд, анализатор 284 устройства складывающихся законцовок, анализатор 286 этапов полета, устройство 288 для задействования режима технического обслуживания, устройство 290 защитной блокировки, передатчик 292 команд и/или, в целом, модули 158, 160 управления устройствами складывающихся законцовок по ФИГ. 2А и 2В, - включает в себя материальное компьютерочитаемое устройство для хранения или диск для хранения, такие как запоминающее устройство, цифровой универсальный диск (DVD), компакт-диск (CD), Blu-Ray диск и т.д., хранящие указанные программное обеспечение и/или прошивки. Кроме того, приведенные в качестве примера модули 158, 160 управления устройствами складывающихся законцовок по ФИГ. 2А и 2В могут включать в себя один или более элементов, процессов и/или устройств в дополнение или вместо показанных на ФИГ. 2А и 2В, и/или могут включать в себя более одного из любых показанных элементов, процессов и устройств или все показанные элементы, процессы и устройства.
[00103] На ФИГ. 3-12 показаны структурные схемы приведенных в качестве примера способов реализации приведенных в качестве примера модулей 158, 160 управления устройствами складывающихся законцовок по ФИГ. 2А и 2В. В этих примерах способы могут быть реализованы с использованием машиночитаемых инструкций, которые содержат программу для исполнения процессором, таким как процессор 1312, показанный в приведенной в качестве примера процессорной платформе 1300, раскрытой ниже в отношении ФИГ. 13. Программа может быть реализована в программном обеспечении, сохраненном на материальном компьютерочитаемом носителе для хранения, таком как диск CD-ROM, гибкий диск, жесткий диск, цифровой универсальный диск (DVD), Blu-Ray диск или запоминающее устройство, связанное с процессором 1312, при этом вся программа и/или ее части в альтернативных вариантах реализации могут быть исполнены устройством, отличным от процессора 1312, и/или реализованы в прошивке или специальных аппаратных средствах. Кроме того, хотя приведенная в качестве примера программа описана ниже со ссылкой на структурные схемы, проиллюстрированные на ФИГ. 3-12, в альтернативных вариантах реализации могут быть использованы многие другие способы реализации приведенных в качестве примера модулей 158, 160 управления устройствами складывающихся законцовок. Например, порядок выполнения блоков может быть изменен, и/или некоторые из описанных блоков могут быть изменены, удалены или скомбинированы.
[00104] Как уже упоминалось выше, приведенные в качестве примеров способы по ФИГ. 3-12 могут быть реализованы с использованием кодированных инструкций (например, компьютере- и/или машиночитаемых инструкций), сохраненных на материальном компьютерочитаемом носителе для хранения, таком как дисковод жесткого диска, флэш-память, постоянное запоминающее устройство (ROM), компакт-диск (CD), цифровой универсальный диск (DVD), кэш-память, оперативное запоминающее устройство (RAM) и/или любое другое устройство для хранения или диск для хранения, в котором информация хранится в течение времени любой продолжительности (например, в течение длительных периодов времени, постоянно, в течение кратких периодов времени, для временной буферизации и/или для кэширования информации). При использовании в настоящем документе термин "материальный компьютерочитаемый носитель данных" явным образом означает, что он включает в себя любой тип компьютерочитаемого устройства для хранения и/или диска для хранения и исключает распространяемые сигналы, а также исключает средства передачи. При использовании в настоящем документе выражения "материальный компьютерочитаемый носитель для хранения" и " материальный машиночитаемый носитель для хранения" используются как взаимозаменяемые. В дополнительном или альтернативном варианте реализации приведенные в качестве примеров процессы по ФИГ. 3-12 могут быть реализованы с использованием кодированных инструкций (например, компьютере- и/или машиночитаемых инструкций), сохраненных на имеющем некратковременную природу компьютере и/или машиночитаемом носителе, таком как дисковод жесткого диска, флэш-память, постоянное запоминающее устройство, компакт-диск, цифровой универсальный диск, кэш-память, оперативное запоминающее устройство и/или любое другое устройство для хранения или диск для хранения, в котором информация хранится в течение времени любой продолжительности (например, в течение длительных периодов времени, постоянно, в течение кратких периодов времени, для временной буферизации и/или для кэширования информации). При использовании в настоящем документе термин "некратковременный компьютерочитаемый носитель" явным образом означает, что он включает любой тип компьютерочитаемого устройства для хранения и/или диска для хранения и исключает распространяемые сигналы, а также исключает средства передачи. При использовании в настоящем документе, когда выражение "по меньшей мере" используется в качестве переходного термина в ограничительной части пункта формулы изобретения, оно является открытым в том смысле, в котором является открытым термин "содержащий". Слово "содержащий" и все другие варианты слова "содержать" однозначно являются терминами с открытым значением. Слово "включающий в себя" и все другие варианты слова "включать в себя" также являются терминами с открытым значением. В отличие от этого, термин "состоящий" и/или другие формы термина "состоящий" являются терминами с закрытым значением.
[00105] На ФИГ. 3 показана структурная схема приведенного в качестве примера способа 300, который может быть реализован посредством приведенных в качестве примера модулей 158, 160 управления устройствами складывающихся законцовок по ФИГ. 2А и 2В для определения и выполнения последовательности событий, относящихся к складывающимся законцовкам, для управления устройствами 154, 156 складывающихся законцовок по ФИГ. 1. Например, модули 158, 160 управления устройствами складывающихся законцовок выполнены с возможностью определения необходимости выполнения последовательности событий для складывающихся законцовок при нормальной работе или при отсутствии реагирования. Приведенный в качестве примера способ 300 начинают в блоке 302, когда модули 158, 160 управления устройствами складывающихся законцовок получают и обрабатывают входные данные, поступающие от системы управления процессами летательного аппарата. Например, модуль 200 сбора выполнен с возможностью получения и обработки входных данных 296. В блоке 304 модули 158, 160 управления устройствами складывающихся законцовок определяют информацию о состоянии, соответствующем устройству складывающихся законцовок и, в целом, системы управления процессами летательного аппарата. Например, регистрационный модуль 210 выполнен с возможностью регистрации и/или определения информации о состоянии устройств 154, 156 складывающихся законцовок и летательного аппарата 100.
[00106] В блоке 306 модули 158, 160 управления устройствами складывающихся законцовок определяют, привести ли в действие систему складывающихся законцовок. Например, модуль 230 приведения в действие системы выполнен с возможностью определения, указывает ли определенная информация о состоянии на необходимость приведения в действие устройств 154, 156 складывающихся законцовок. Если в блоке 306 модули 158, 160 управления устройствами складывающихся законцовок определяют отсутствие необходимости приведения в действие системы складывающихся законцовок, управление возвращают к блоку 302 для получения и обработки дополнительных входных данных. Например, информация о состоянии устройств 154, 156 складывающихся законцовок может не указывать на необходимость приведения в действие системы складывающихся законцовок. Если в блоке 306 модули 158, 160 управления устройствами складывающихся законцовок определяют необходимость приведения в действие системы складывающихся законцовок, в блоке 308 модули 158, 160 управления устройствами складывающихся законцовок приводят в действие систему складывающихся законцовок. Например, информация о состоянии устройств 154, 156 складывающихся законцовок может указывать на необходимость приведения в действие системы складывающихся законцовок.
[00107] В блоке 308 модули 158, 160 управления устройствами складывающихся законцовок приводят в действие систему складывающихся законцовок. Например, модуль 230 приведения в действие системы приводит в действие систему складывающихся законцовок. В блоке 310 модули 158, 160 управления устройствами складывающихся законцовок оценивают информацию о состоянии. Например, модуль 250 работы с последовательностью и управления выполнен с возможностью оценки информации о состоянии. В блоке 312 модули 158, 160 управления устройствами складывающихся законцовок определяют, включает ли в себя информация о состоянии информацию о нереагирующем состоянии. Например, модуль 250 работы с последовательностью и управления выполнен с возможностью определения, включает ли в себя информация о состоянии информацию о нереагирующем состоянии. Если в блоке 312 модулями 158, 160 управления устройствами складывающихся законцовок определено, что информация о состоянии не включает в себя информацию о нереагирующем состоянии, в блоке 318 модули 158, 160 управления устройствами складывающихся законцовок выполняют последовательность нормальной работы складывающихся законцовок для устройств 154, 156 складывающихся законцовок. Если в блоке 312 модулями 158, 160 управления устройствами складывающихся законцовок определено, что информация о состоянии включает в себя информацию о нереагирующем состоянии, в блоке 314 модули 158, 160 управления устройствами складывающихся законцовок обрабатывают информацию о нереагирующем состоянии.
[00108] В блоке 314 модули 158, 160 управления устройствами складывающихся законцовок обрабатывают информацию о нереагирующем состоянии. Например, модуль 240 мониторинга и оповещения выполнен с возможностью обработки нереагирующего состояния. В блоке 316 модули 158, 160 управления устройствами складывающихся законцовок определяют, могут ли быть сглажены последствия нереагирующего состояния. Например, модуль 240 мониторинга и оповещения выполнен с возможностью определения, могут ли быть сглажены последствия нереагирующего состояния. Если в блоке 316 модулями 158, 160 управления устройствами складывающихся законцовок определено, что последствия нереагирующего состояния могут быть сглажены, в блоке 318 модули 158, 160 управления устройствами складывающихся законцовок выполняют последовательность для нормальной работы. Если в блоке 316 модулями 158, 160 управления устройствами складывающихся законцовок определено, что последствия нереагирующего состояния не могут быть сглажены, управление переходит в блок 322 для выполнения последовательности для складывающихся законцовок при отсутствии реагирования.
[00109] В блоке 318 модули 158, 160 управления устройствами складывающихся законцовок выполняют последовательность нормальной работы складывающихся законцовок. Например, модуль 250 работы с последовательностью и управления выполнен с возможностью выработки и выполнения последовательности нормальной работы складывающихся законцовок, при этом последовательность нормальной работы складывающихся законцовок может включать в себя один или более этапов работы складывающихся законцовок и/или действий со складывающимися законцовками. В блоке 320 модули 158, 160 управления устройствами складывающихся законцовок определяют, выполнена ли последовательность нормальной работы складывающихся законцовок. Например, модуль 250 работы с последовательностью и управления может определить, выполнена ли последовательность нормальной работы складывающихся законцовок. Если в блоке 320 модулями 158, 160 управления устройствами складывающихся законцовок определено, что последовательность нормальной работы складывающихся законцовок не была выполнена, в блоке 322 модули 158, 160 управления устройствами складывающихся законцовок исполняют последовательность, исполняемую при отсутствии реагирования складывающихся законцовок. Например, модуль 250 работы с последовательностью и управления выполнен с возможностью выработки и выполнения последовательности для складывающихся законцовок при отсутствии реагирования, при этом последовательность, исполняемая при отсутствии реагирования складывающихся законцовок, может включать в себя один или более этапов работы складывающихся законцовок и/или действий со складывающимися законцовками. Если в блоке 320 модулями 158, 160 управления устройствами складывающихся законцовок определено, что последовательность нормальной работы складывающихся законцовок выполнена, приведенный в качестве примера способ 300 прекращают.
[00110] Дополнительная подробная информация, связанная с получением и обработкой входных данных (ФИГ. 3 блок 302), показана на ФИГ. 4. На ФИГ. 4 показана структурная схема приведенного в качестве примера способа 400, который может быть реализован посредством модулей 158, 160 управления устройствами складывающихся законцовок по ФИГ. 2А и 2В для получения и обработки входных данных. Приведенный в качестве примера способ 400 начинают в блоке 402, когда модуль 200 сбора получает входные данные. Например, модуль 200 сбора выполнен с возможностью получения входных данных 296 посредством сетевого интерфейса 202 или интерфейса 204 датчиков. В блоке 404 модуль 200 сбора выбирает входные данные для обработки. Например, устройство 206 обработки информации выполнено с возможностью выбора входных данных 296 для обработки. В блоке 406 модуль 200 сбора обрабатывает входные данные. Например, устройство 206 обработки информации выполнено с возможностью обработки входных данных 296 посредством преобразования (например, преобразования с использованием преобразовательного вычисления, преобразования в отличающиеся единицы измерения и т.д.), масштабирования (например, масштабирования с использованием коэффициента масштабирования) и/или пересчета (например, пересчета с использованием заданной кривой, пересчета с использованием заданного уравнения) значения входных данных 296.
[00111] В блоке 408 модуль 200 сбора подтверждает достоверность входных данных. Например, устройство 208 проверки достоверности информации выполнено с возможностью проверки достоверности входных данных 296. В блоке 410 модуль 200 сбора определяет, являются ли входные данные достоверными. Например, устройство 208 проверки достоверности информации выполнено с возможностью определения, являются ли входные данные 296 достоверными. Если в блоке 410 модуль 200 сбора определяет, что входные данные являются достоверными, в блоке 414 модуль 200 сбора сохраняет обработанные входные данные в базе данных. Например, устройство 208 проверки достоверности информации выполнено с возможностью сохранения входных данных 296 в базе данных 270 при определении того, что входные данные 296 являются достоверными. Если в блоке 410 модуль 200 сбора определяет, что входные данные являются недостоверными, управление переходит в блок 412 для обработки недостоверных входных данных. В блоке 412 модуль 200 сбора обрабатывает недостоверные входные данные. Например, устройство 208 проверки достоверности информации выполнено с возможностью определения, что входные данные 296 имеют значение вне диапазона допустимых значений для входных данных 296 и в ответ, определяет, что входные данные 296 являются недостоверными. В блоке 414 модуль 200 сбора сохраняет обработанные входные данные в базе данных. Например, устройство 208 проверки достоверности информации выполнено с возможностью сохранения входных данных 296 в базе данных 270. В блоке 416 модуль 200 сбора определяет наличие других входных данных для обработки. Если в блоке 416 модуль 200 сбора определяет наличие других входных данных для обработки, управление возвращают к блоку 404 для выбора других входных данных для обработки, в противном случае приведенный в качестве примера способ 400 прекращают.
[00112] Дополнительная подробная информация, связанная с определением информации о состоянии (ФИГ. 3 блок 304), показана на ФИГ. 5. На ФИГ. 5 показана структурная схема приведенного в качестве примера способа 500, который может быть реализован посредством модулей 158, 160 управления устройствами складывающихся законцовок по ФИГ. 2А и 2 В для определения информации о состоянии устройства складывающихся законцовок, и, в целом - системы управления процессами летательного аппарата. Приведенный в качестве примера способ 500 начинают в блоке 502, когда модули 158, 160 управления устройствами складывающихся законцовок регистрируют и определяют входную информацию о состоянии из кабины экипажа. Например, устройство 212 регистрации входных данных, поступающих из кабины экипажа, выполнено с возможностью определения состояния входных данных, поступающих из кабины экипажа летательного аппарата. В блоке 504 модули 158, 160 управления устройствами складывающихся законцовок определяют информацию о состоянии на этапе полета. Например, устройство 214 регистрации этапов полета выполнено с возможностью определения состояния на этапе полета летательного аппарата. В блоке 506 модули 158, 160 управления устройствами складывающихся законцовок определяют информацию о состоянии складывающихся законцовок. Например, устройство регистрации состояния складывающихся законцовок выполнено с возможностью определения состояния или состояний устройств 154, 156 складывающихся законцовок по ФИГ. 1. В блоке 508 модули 158, 160 управления устройствами складывающихся законцовок определяют информацию о состоянии стопоров складывающихся законцовок. Например, устройство 218 регистрации состояния стопоров складывающихся законцовок выполнено с возможностью определения состояния замка или дополнительного механизма фиксации устройств 154, 156 складывающихся законцовок. В блоке 510 модули 158, 160 управления устройствами складывающихся законцовок определяют информацию о состоянии фиксаторов складывающихся законцовок. Например, устройство 220 регистрации состояния фиксаторов складывающихся законцовок выполнено с возможностью определения состояния основного фиксатора, вспомогательного фиксатора и т.д. устройств 154, 156 складывающихся законцовок.
[00113] Дополнительная подробная информация, связанная с приведением в действие системы складывающихся законцовок (ФИГ. 3 блок 308), показана на ФИГ. 6. На ФИГ. 6 показана структурная схема приведенного в качестве примера способа 600, который может быть реализован посредством модулей 158, 160 управления устройствами складывающихся законцовок по ФИГ. 2А и 2В для приведения в действие системы складывающихся законцовок. Приведенный в качестве примера способ 600 начинают в блоке 602, когда модули 158, 160 управления устройствами складывающихся законцовок приводят в действие устройства складывающихся законцовок. Например, устройство 232 приведения в действие устройств складывающихся законцовок выполнено с возможностью установки флажка (например, флажка приведения в действие устройств складывающихся законцовок) для устройств 154, 156 складывающихся законцовок, выдающих предупреждения в модули 158, 160 управления устройствами складывающихся законцовок о том, что устройства 154, 156 складывающихся законцовок приведены в действие. В блоке 604 модули 158, 160 управления устройствами складывающихся законцовок приводят в действие одну или более приводных систем устройств складывающихся законцовок.
Например, устройство 234 приведения в действие приводной системы устройств складывающихся законцовок выполнено с возможностью установки флажка (например, флажка приведения в действие приводной системы устройств складывающихся законцовок) для приводной системы устройств 154, 156 складывающихся законцовок, выдающих предупреждения в модули 158, 160 управления устройствами складывающихся законцовок о том, что приводная система устройств складывающихся законцовок приведена в действие.
[00114] В блоке 606 модули 158, 160 управления устройствами складывающихся законцовок приводят в действие один или более удаленных электронных блоков. Например, устройство 236 приведения в действие удаленного электронного блока выполнено с возможностью установки флажка (например, флажка приведения в действие удаленного электронного блока) для удаленных электронных блоков 168, 170 по ФИГ. 1, выдающих предупреждения в модули 158, 160 управления устройствами складывающихся законцовок о том, что удаленные электронные блоки 168, 170 приведены в действие. В блоке 608 модули 158, 160 управления устройствами складывающихся законцовок приводят в действие Один или более компонентов. Например, устройство 238 приведения в действие компонентов выполнено с возможностью установки флажка (например, флажка приведения в действие компонента) для одного или более компонентов устройств 154, 156 складывающихся законцовок, выдающих предупреждения в модули 158, 160 управления устройствами складывающихся законцовок о том, что указанные один или более компонентов приведены в действие.
[00115] Дополнительная подробная информация в связи с обработкой состояний отсутствия реагирования (ФИГ. 3 блок 314) показана на ФИГ. 7. На ФИГ. 7 показана структурная схема приведенного в качестве примера способа 700, который может быть реализован посредством модулей 158, 160 управления устройствами складывающихся законцовок по ФИГ. 2А и 2В для обработки информации о нереагирующем состоянии. Приведенный в качестве примера способ 700 начинают в блоке 702, когда модули 158, 160 управления устройствами складывающихся законцовок получают информацию о нереагирующем состоянии. Например, классификатор 242 нереагирующего состояния выполнен с возможностью получения информации о нереагирующем состоянии из базы данных 270. В блоке 704 модули 158, 160 управления устройствами складывающихся законцовок выбирают нереагирующее состояние для обработки. Например, классификатор 242 нереагирующего состояния выполнен с возможностью выбора нереагирующего состояния для обработки.
[00116] В блоке 706 модули 158,160 управления устройствами складывающихся законцовок определяют, вызвано ли нереагирующее состояние каким-либо компонентом. Например, классификатор 242 нереагирующего состояния выполнен с возможностью определения, вызвано ли нереагирующее состояние состоянием компонента. Если в блоке 706 модулями 158, 160 управления устройствами складывающихся законцовок определено, что нереагирующее состояние не вызвано указанным компонентом, управление переходит в блок 714 для выработки предупреждения. Если в блоке 706 модулями 158, 160 управления устройствами складывающихся законцовок определено, что нереагирующее состояние вызвано указанным компонентом, в блоке 708 модули 158, 160 управления устройствами складывающихся законцовок определяют наличие резервного компонента. Например, классификатор 242 нереагирующего состояния выполнен с возможностью определения, имеет ли указанный компонент один или более запасных или резервных компонентов, когда этот компонент находится в нереагирующем состоянии. Если в блоке 708 модули 158, 160 управления устройствами складывающихся законцовок определено отсутствие резервного компонента, управление переходит в блок 714 для выработки предупреждения. Если в блоке 708 модулями 158, 160 управления устройствами складывающихся законцовок определено наличие резервного компонента, в блоке 710 модули 158, 160 управления устройствами складывающихся законцовок заменяют входные данные от нереагирующего компонента входными данными от резервного компонента. Например, классификатор 242 нереагирующего состояния выполнен с возможностью установки флажка (например, флажка резервного компонента), выдающего предупреждение в модули 158, 160 управления устройствами складывающихся законцовок для отключения канала данных для нереагирующего компонента и задействования канала данных резервного компонента. Например, модуль 200 сбора выполнен с возможностью отключения канала данных для нереагирующего компонента и задействования канала данных резервного компонента.
[00117] В блоке 712 модули 158,160 управления устройствами складывающихся законцовок устанавливают флажок сглаживания последствий. Например, классификатор 242 нереагирующего состояния выполнен с возможностью установки флажка сглаживания последствий, которым выдают предупреждение в модули 158, 160 управления устройствами складывающихся законцовок о том, что последствия нереагирующего состояния компонента могут быть сглажены. В блоке 714 модули 158, 160 управления устройствами складывающихся законцовок вырабатывают предупреждение. Например, устройство 244 выработки предупреждений выполнено с возможностью выработки предупреждения, такого как, например, отображение предупреждения на пользовательском интерфейсе, распространение сообщения о предупреждениях по сети управления процессом, создания журнала регистрации предупреждений и/или сообщения и т.д. В блоке 716 модули 158, 160 управления устройствами складывающихся законцовок управляют указанным предупреждением. Например, устройство 246 управления предупреждениями выполнено с возможностью обработки выработанного предупреждения посредством добавления предупреждения в перечень предупреждений, журнал регистрации предупреждений, сообщение о предупреждениях и т.д. В блоке 718 модули 158, 160 управления устройствами складывающихся законцовок передают информацию о предупреждениях (например, перечень предупреждений, журнал регистрации предупреждений, сообщение о предупреждениях и т.д.) в пользовательский интерфейс. Например, устройство 248 предоставления информации для пользовательского интерфейса выполнено с возможностью назначения информации, относящейся к выработанным предупреждениям, переменным, связанным с пользовательским интерфейсом устройства складывающихся законцовок. В блоке 720 модули 158, 160 управления устройствами складывающихся законцовок определяют наличие другого нереагирующего состояния для обработки. Если в блоке 720 модули 158, 160 управления устройствами складывающихся законцовок определяют наличие другого нереагирующего состояния для обработки, управление возвращают к блоку 704 для выбора другого нереагирующего состояния для обработки, в противном случае приведенный в качестве примера способ 700 прекращают.
[00118] Дополнительная подробная информация, связанная с выполнением последовательности нормальной работы складывающихся законцовок (ФИГ. 3 блок 318), показана на ФИГ. 8. На ФИГ. 8 показана структурная схема приведенного в качестве примера способа 800, который может быть реализован посредством модулей 158, 160 управления устройствами складывающихся законцовок по ФИГ. 2А и 2В для выполнения последовательности нормальной работы складывающихся законцовок. Приведенный в качестве примера способ 800 начинают в блоке 802, когда модули 158, 160 управления устройствами складывающихся законцовок определяют, соответствует ли состояние складывающихся законцовок режиму полета. Например, устройство 256 оценки состояния выполнено с возможностью оценки состояния складывающихся законцовок и определения, соответствует ли состояние складывающихся законцовок режиму полета, сложенному состоянию и т.д. Если в блоке 802 модулями 158, 160 управления устройствами складывающихся законцовок определено, что состояние складывающихся законцовок соответствует режиму полета, в блоке 804 модули 158, 160 управления устройствами складывающихся законцовок выполняют последовательность операций складывания. Например, устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью выработки и выполнения последовательности нормальной работы складывающихся законцовок для автоматического перемещения складывающихся законцовок из выдвинутого положения в сложенное положение. Последовательность нормальной работы складывающихся законцовок может включать в себя один или более этапов работы складывающихся законцовок и/или действий со складывающимися законцовками. Если в блоке 802 модулями 158, 160 управления устройствами складывающихся законцовок определено, что состояние складывающихся законцовок не соответствует режиму полета (например, в сложенном состоянии), то в блоке 806 модули 158, 160 управления устройствами складывающихся законцовок выполняют последовательность операций раскладывания. Например, устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью выработки и выполнения последовательности нормальной работы складывающихся законцовок для автоматического перемещения складывающихся законцовок из сложенного положения в выдвинутое положение.
[00119] Дополнительная подробная информация, связанная с выполнением приведенной в качестве примера последовательности операций складывания (ФИГ. 8 блок 804), показана на ФИГ. 9. На ФИГ. 9 показана структурная схема приведенного в качестве примера способа 900, который может быть реализован посредством модулей 158, 160 управления устройствами складывающихся законцовок по ФИГ. 2А и 2В для выполнения приведенной в качестве примера последовательности операций складывания устройств 154, 156 складывающихся законцовок по ФИГ. 1. Приведенный в качестве примера способ 900 начинают в блоке 902, когда модули 158, 160 управления устройствами складывающихся законцовок получают последовательность нормальной работы складывающихся законцовок. Например, устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью определения последовательности нормальной работы складывающихся законцовок. Устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью сохранения последовательности нормальной работы складывающихся законцовок в базе данных 270. Контроллер 258 складывающихся законцовок выполнен с возможностью получения последовательности нормальной работы складывающихся законцовок от устройства 252 задания последовательности нормальной работы складывающихся законцовок или из базы данных 270. В блоке 904 модули 158, 160 управления устройствами складывающихся законцовок открывают запорный клапан (например, гидравлический клапан, пневматический клапан и т.д.). Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 по ФИГ. 1 на открытие запорного клапана устройства 154 складывающейся законцовки посредством передатчика 292 команд. В блоке 906 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния запорного клапана. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения изменения состояния запорного клапана на основании показания датчика, выполняющего мониторинг запорного клапана (например, датчика положения, бесконтактного датчика и т.д.). Если в блоке 906 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 908 модули 158, 160 управления устройствами складывающихся законцовок перемещают вспомогательный фиксатор в среднее положение, в противном случае приведенный в качестве примера способ 900 прекращают.
[00120] В блоке 908 модули 158, 160 управления устройствами складывающихся законцовок перемещают вспомогательный фиксатор в среднее положение или промежуточное положение. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для перемещения вспомогательного фиксатора устройства 154 складывающейся законцовки в среднее положение. В блоке 910 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния вспомогательного фиксатора. Если в блоке 910 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 912 модули 158, 160 управления устройствами складывающихся законцовок выполняют расфиксацию основного фиксатора, в противном случае приведенный в качестве примера способ 900 прекращают.
[00121] В блоке 912 модули 158, 160 управления устройствами складывающихся законцовок выполняют расфиксацию основного фиксатора. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для расфиксации основного фиксатора устройства 154 складывающейся законцовки. В блоке 914 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния основного фиксатора. Если в блоке 914 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 916 модули 158, 160 управления устройствами складывающихся законцовок отводят стопорные штифты, в противном случае приведенный в качестве примера способ 900 прекращают.
[00122] В блоке 916 модули 158,160 управления устройствами складывающихся законцовок отводят стопорные штифты. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для отвода стопорных штифтов устройства 154 складывающейся законцовки. В блоке 918 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния стопорных штифтов. Если в блоке 918 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 920 модули 158, 160 управления устройствами складывающихся законцовок перемещают вспомогательный фиксатор в положение расфиксации, в противном случае приведенный в качестве примера способ 900 прекращают.
[00123] В блоке 920 модули 158,160 управления устройствами складывающихся законцовок перемещают вспомогательный фиксатор в положение расфиксации. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для перемещения вспомогательного фиксатора устройства 154 складывающейся законцовки в положение расфиксации. В блоке 922 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния вспомогательного фиксатора. Если в блоке 922 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 924 модули 158, 160 управления устройствами складывающихся законцовок выполняют складывание законцовок, в противном случае приведенный в качестве примера способ 900 прекращают.
[00124] В блоке 924 модули 158,160 управления устройствами складывающихся законцовок выполняют складывание законцовок. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для перемещения подвижной поверхности 134 устройства 154 складывающейся законцовки из выдвинутого положения 142 в сложенное положение 146. В блоке 926 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния складывающихся законцовок. Если в блоке 926 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 928 модули 158, 160 управления устройствами складывающихся законцовок задействуют стопор развертывания, в противном случае приведенный в качестве примера способ 900 прекращают.
[00125] В блоке 928 модули 158, 160 управления устройствами складывающихся законцовок задействуют стопор развертывания. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд на задействование стопора развертывания устройства 154 складывающейся законцовки. В блоке 930 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния стопора развертывания. Если в блоке 930 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 932 модули 158, 160 управления устройствами складывающихся законцовок перемещают вспомогательный фиксатор в среднее положение, в противном случае приведенный в качестве примера способ 900 прекращают.
[00126] В блоке 932 модули 158, 160 управления устройствами складывающихся законцовок перемещают вспомогательный фиксатор в среднее положение или промежуточное положение. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для перемещения вспомогательного фиксатора устройства 154 складывающейся законцовки из положения расфиксации в среднее положение. В блоке 934 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния вспомогательного фиксатора. Если в блоке 934 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 936 модули 158, 160 управления устройствами складывающихся законцовок выдвигают стопорные штифты, в противном случае приведенный в качестве примера способ 900 прекращают.
[00127] В блоке 936 модули 158, 160 управления устройствами складывающихся законцовок выдвигают стопорные штифты. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для выдвижения стопорных штифтов устройства 154 складывающейся законцовки. В блоке 938 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния стопорных штифтов. Если в блоке 938 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 940 модули 158, 160 управления устройствами складывающихся законцовок фиксируют основной фиксатор, в противном случае приведенный в качестве примера способ 900 прекращают.
[00128] В блоке 940 модули 158, 160 управления устройствами складывающихся законцовок фиксируют основной фиксатор. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для перемещения основного фиксатора устройства 154 складывающейся законцовки из положения расфиксации в положение фиксации. В блоке 942 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния основного фиксатора. Если в блоке 942 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 944 модули 158, 160 управления устройствами складывающихся законцовок перемещают вспомогательный фиксатор в положение фиксации, в противном случае приведенный в качестве примера способ 900 прекращают.
[00129] В блоке 944 модули 158, 160 управления устройствами складывающихся законцовок перемещают вспомогательный фиксатор в положение фиксации. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для перемещения вспомогательного фиксатора устройства 154 складывающейся законцовки из среднего положения в положение фиксации. В блоке 946 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния вспомогательного фиксатора. Если в блоке 946 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 948 модули 158, 160 управления устройствами складывающихся законцовок закрывают запорный клапан, в противном случае приведенный в качестве примера способ 900 прекращают.
[00130] В блоке 948 модули 158, 160 управления устройствами складывающихся законцовок закрывают запорный клапан. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд на закрытие запорного клапана устройства 154 складывающейся законцовки. В блоке 950 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния запорного клапана. Если в блоке 950 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 952 модули 158, 160 управления устройствами складывающихся законцовок устанавливают флажок завершения, в противном случае приведенный в качестве примера способ 900 прекращают.
[00131] Дополнительная подробная информация, связанная с открытием запорного клапана (ФИГ. 9 блок 904), показана на ФИГ. 10. На ФИГ. 10 показана структурная схема приведенного в качестве примера способа 1000, который может быть реализован посредством модулей 158, 160 управления устройствами складывающихся законцовок по ФИГ. 2А и 2В для приведения в действие компонента устройств 154, 156 складывающихся законцовок по ФИГ. 1. Приведенный в качестве примера способ 1000 также может быть применен к действиям, описанным для ФИГ. 9, блоки 904, 908, 912, 916, 920, 924, 928, 932, 936, 940, 944 и 948. Приведенный в качестве примера способ 1000 начинают в блоке 1002, когда модули 158, 160 управления устройствами складывающихся законцовок получают информацию о состоянии компонента. Например, устройство 256 оценки состояния выполнено с возможностью получения информации о состоянии запорного клапана из базы данных 270. В блоке 1004 модули 158, 160 управления устройствами складывающихся законцовок определяют, находится ли компонент в нереагирующем состоянии. Например, устройство 256 оценки состояния выполнено с возможностью определения, находится ли запорный клапан в нереагирующем состоянии. Если в блоке 1004 модули 158, 160 управления устройствами складывающихся законцовок определяют, что компонент находится в реагирующем состоянии, в блоке 1006 модули 158, 160 управления устройствами складывающихся законцовок вырабатывают команду. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выработки команды.
[00132] В блоке 1008 модули 158, 160 управления устройствами складывающихся законцовок подтверждают достоверность команды. Например, диспетчерский модуль 280 выполнен с возможностью проверки достоверности команды. В блоке 1010 модули 158, 160 управления устройствами складывающихся законцовок отправляют команду. Например, передатчик 292 команд выполнен с возможностью отправки команды на удаленный электронный блок 168 по ФИГ. 1. В блоке 1012 модули 158, 160 управления устройствами складывающихся законцовок определяют, изменилось ли состояние компонента. Например, устройство 256 оценки состояния выполнено с возможностью определения, открыт ли запорный клапан, на основании изменения состояния запорного клапана. Если в блоке 1012 модулями 158, 160 управления устройствами складывающихся законцовок определено, что состояние компонента изменилось, в блоке 1012 модули 158, 160 управления устройствами складывающихся законцовок устанавливают флажок завершения, в противном случае приведенный в качестве примера способ 1000 прекращают. Например, контроллер 258 складывающихся законцовок выполнен с возможностью установки флажка завершения.
[00133] Если в блоке 1004 модулями 158, 160 управления устройствами складывающихся законцовок определено, что компонент находится в нереагирующем состоянии, в блоке 1014 модули 158, 160 управления устройствами складывающихся законцовок обрабатывают информацию о нереагирующем состоянии компонента. Например, модули 158, 160 управления устройствами складывающихся законцовок выполнены с возможностью обработки нереагирующего состояния компонента в соответствии с приведенным в качестве примера способом 700, как описано для ФИГ. 7. В блоке 1016 модули 158, 160 управления устройствами складывающихся законцовок определяют, могут ли быть сглажены последствия нереагирующего состояния компонента. Например, классификатор 242 нереагирующего состояния выполнен с возможностью определения, могут ли быть сглажены последствия нереагирующего состояния запорного клапана, на основании того, установлен ли флажок (например, установлен ли флажок сглаживания последствий). Если в блоке 1016 модули 158, 160 управления устройствами складывающихся законцовок определяют, что последствия нереагирующего состояния компонента могут быть сглажены, управление возвращают к блоку 1002 для получения информации о состоянии компонента (например, получения обновленной информации о состоянии компонента), в противном случае приведенный в качестве примера способ 1000 прекращают.
[00134] Дополнительная подробная информация, связанная с подтверждением достоверности команды (ФИГ. 10 блок 1008), показана на ФИГ. 11. На ФИГ. 11 показана структурная схема приведенного в качестве примера способа 1100, который может быть реализован посредством модулей 158, 160 управления устройствами складывающихся законцовок по ФИГ. 2А и 2В для проверки достоверности выходящей электронной команды, поступающей от контроллера 258 складывающихся законцовок, и, в целом в модули 158, 160 управления устройствами складывающихся законцовок. Приведенный в качестве примера способ 1100 начинают в блоке 1102, когда модули 158, 160 управления устройствами складывающихся законцовок получают указанную команду. Например, перехватчик 282 команд выполнен с возможностью получения команды посредством перехвата команды от контроллера 258 складывающихся законцовок.
[00135] В блоке 1104 модули 158, 160 управления устройствами складывающихся законцовок определяют, нарушает ли команда правило для устройства складывающихся законцовок. Например, анализатор 284 устройства складывающихся законцовок выполнен с возможностью определения, нарушает ли команда одно или более правил для устройств складывающихся законцовок. Если в блоке 1104 модулями 158, 160 управления устройствами складывающихся законцовок определено, что команда нарушает указанные одно или более правил для устройств складывающихся законцовок, в блоке 1106 модули 158,160 управления устройствами складывающихся законцовок изменяют указанную команду с помощью сохраненной команды. Например, устройство 290 защитной блокировки выполнено с возможностью замены команды (например, значения команды) сохраненной командой, полученной из базы данных 270. Если в блоке 1104 модулями 158,160 управления устройствами складывающихся законцовок определено, что команда не нарушает указанные одно или более правил для устройств складывающихся законцовок, в блоке 1108 модули 158, 160 управления устройствами складывающихся законцовок определяют, нарушает ли команда правило для этапа полета. Например, анализатор 286 этапов полета выполнен с возможностью определения, нарушает ли команда одно или более правил для этапа полета. Если в блоке 1108 модулями 158, 160 управления устройствами складывающихся законцовок определено, что команда нарушает указанные одно или более правил для этапа полета, в блоке 1110 модули 158, 160 управления устройствами складывающихся законцовок отменяют команду. Например, устройство 290 защитной блокировки выполнено с возможностью отмены команды посредством аннулирования или удаления команды. В другом примере устройство 290 защитной блокировки выполнено с возможностью замены команды нулевым значением, нулевым коэффициентом, нулевым символом и т.д. Если в блоке 1108 модулями 158, 160 управления устройствами складывающихся законцовок определено, что команда не нарушает указанные одно или более правил для этапа полета, приведенный в качестве примера способ 1100 прекращают.
[00136] Дополнительная подробная информация, связанная с выполнением приведенной в качестве примера последовательности операций раскладывания (ФИГ. 8 блок 806), показана на ФИГ. 12. На ФИГ. 12 показана структурная схема приведенного в качестве примера способа 1200, который может быть реализован посредством модулей 158, 160 управления устройствами складывающихся законцовок по ФИГ. 2А и 2В для выполнения приведенной в качестве примера последовательности операций раскладывания устройств 154, 156 складывающихся законцовок по ФИГ. 1. Приведенный в качестве примера способ 1200 начинают в блоке 1202, когда модули 158, 160 управления устройствами складывающихся законцовок получают последовательность нормальной работы складывающихся законцовок. Например, устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью определения последовательности нормальной работы складывающихся законцовок. Устройство 252 задания последовательности нормальной работы складывающихся законцовок выполнено с возможностью сохранения в базе данных 270 последовательности нормальной работы складывающихся законцовок. Контроллер 258 складывающихся законцовок выполнен с возможностью получения последовательности нормальной работы складывающихся законцовок от устройства 252 задания последовательности нормальной работы складывающихся законцовок или из базы данных 270. В блоке 1204 модули 158, 160 управления устройствами складывающихся законцовок открывают запорный клапан (например, гидравлический клапан, пневматический клапан и т.д.). Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 по ФИГ. 1 посредством передатчика 292 команд на открытие запорного клапана устройства 154 складывающейся законцовки. В блоке 1206 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния запорного клапана. Если в блоке 1206 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 1208 модули 158, 160 управления устройствами складывающихся законцовок перемещают вспомогательный фиксатор в среднее положение, в противном случае приведенный в качестве примера способ 1200 прекращают.
[00137] В блоке 1208 модули 158, 160 управления устройствами складывающихся законцовок перемещают вспомогательный фиксатор в среднее положение или промежуточное положение. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для перемещения вспомогательного фиксатора устройства 154 складывающейся законцовки в среднее положение. В блоке 1210 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния вспомогательного фиксатора. Если в блоке 1210 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 1212 модули 158, 160 управления устройствами складывающихся законцовок выполняют расфиксацию основного фиксатора, в противном случае приведенный в качестве примера способ 1200 прекращают.
[00138] В блоке 1212 модули 158, 160 управления устройствами складывающихся законцовок выполняют расфиксацию основного фиксатора. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для расфиксации основного фиксатора устройства 154 складывающейся законцовки. В блоке 1214 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния основного фиксатора. Если в блоке 1214 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 1216 модули 158, 160 управления устройствами складывающихся законцовок отводят стопорные штифты, в противном случае приведенный в качестве примера способ 1200 прекращают.
[00139] В блоке 1216 модули 158, 160 управления устройствами складывающихся законцовок отводят стопорные штифты. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для отвода стопорных штифтов устройства 154 складывающейся законцовки. В блоке 1218 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния стопорных штифтов. Если в блоке 1218 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 1220 модули 158, 160 управления устройствами складывающихся законцовок перемещают вспомогательный фиксатор в положение расфиксации, в противном случае приведенный в качестве примера способ 1200 прекращают.
[00140] В блоке 1220 модули 158, 160 управления устройствами складывающихся законцовок перемещают вспомогательный фиксатор в положение расфиксации. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для перемещения вспомогательного фиксатора устройства 154 складывающейся законцовки в положение расфиксации. В блоке 1222 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния вспомогательного фиксатора. Если в блоке 1222 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 1224 модули 158, 160 управления устройствами складывающихся законцовок задействуют стопор развертывания, в противном случае приведенный в качестве примера способ 1200 прекращают.
[00141] В блоке 1224 модули 158, 160 управления устройствами складывающихся законцовок задействуют стопор развертывания. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд на задействование стопора развертывания устройства 154 складывающейся законцовки. В блоке 1226 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния стопора развертывания. Если в блоке 1226 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 1228 модули 158, 160 управления устройствами складывающихся законцовок выполняют раскладывание законцовок, в противном случае приведенный в качестве примера способ 1200 прекращают.
[00142] В блоке 1228 модули 158, 160 управления устройствами складывающихся законцовок выполняют раскладывание законцовок. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для перемещения подвижной поверхности 134 устройства 154 складывающейся законцовки из сложенного положения 146 в выдвинутое положение 142. В блоке 1230 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния складывающихся законцовок. Если в блоке 1230 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 1232 модули 158, 160 управления устройствами складывающихся законцовок перемещают вспомогательный фиксатор в среднее положение, в противном случае приведенный в качестве примера способ 1200 прекращают.
[00143] В блоке 1232 модули 158, 160 управления устройствами складывающихся законцовок перемещают вспомогательный фиксатор в среднее положение или промежуточное положение. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для перемещения вспомогательного фиксатора устройства 154 складывающейся законцовки из положения расфиксации в среднее положение. В блоке 1234 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния вспомогательного фиксатора. Если в блоке 1234 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 1236 модули 158, 160 управления устройствами складывающихся законцовок выдвигают стопорные штифты, в противном случае приведенный в качестве примера способ 1200 прекращают.
[00144] В блоке 1236 модули 158, 160 управления устройствами складывающихся законцовок выдвигают стопорные штифты. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для выдвижения стопорных штифтов устройства 154 складывающейся законцовки. В блоке 1238 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния стопорных штифтов. Если в блоке 1238 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 1240 модули 158,160 управления устройствами складывающихся законцовок фиксируют основной фиксатор, в противном случае приведенный в качестве примера способ 1200 прекращают.
[00145] В блоке 1240 модули 158, 160 управления устройствами складывающихся законцовок фиксируют основной фиксатор. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для перемещения основного фиксатора устройства 154 складывающейся законцовки из положения расфиксации в положение фиксации. В блоке 1242 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния основного фиксатора. Если в блоке 1242 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 1244 модули 158, 160 управления устройствами складывающихся законцовок перемещают вспомогательный фиксатор в положение фиксации, в противном случае приведенный в качестве примера способ 1200 прекращают.
[00146] В блоке 1244 модули управления складывающимися законцовками перемещают вспомогательный фиксатор в положение фиксации. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд для перемещения вспомогательного фиксатора устройства 154 складывающейся законцовки из среднего положения в положение фиксации. В блоке 1246 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния вспомогательного фиксатора. Если в блоке 1246 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 1248 модули 158, 160 управления устройствами складывающихся законцовок закрывают запорный клапан, в противном случае приведенный в качестве примера способ 1200 прекращают.
[00147] В блоке 1248 модули 158, 160 управления устройствами складывающихся законцовок закрывают запорный клапан. Например, контроллер 258 складывающихся законцовок выполнен с возможностью выдачи команды на удаленный электронный блок 168 посредством передатчика 292 команд на закрытие запорного клапана устройства 154 складывающейся законцовки. В блоке 1250 модули 158, 160 управления устройствами складывающихся законцовок определяют, является ли операция успешной. Например, контроллер 258 складывающихся законцовок выполнен с возможностью определения успешности операции на основании изменения состояния запорного клапана. Если в блоке 1250 модулями 158, 160 управления устройствами складывающихся законцовок определено, что операция является успешной, в блоке 1252 модули 158, 160 управления устройствами складывающихся законцовок устанавливают флажок завершения, в противном случае приведенный в качестве примера способ 1200 прекращают.
[00148] Вышеописанные способы по ФИГ. 3-12 могут быть применены к модулю 158 управления складывающимися законцовками, к модулю 160 управления складывающимися законцовками и/или к тому и другому. В некоторых примерах вышеописанные способы по ФИГ. 3-12 применимы к одному или более модулям управления складывающимися законцовками. Например, вышеописанные способы по ФИГ. 3-12 могут быть применены к модулю 158 управления складывающимися законцовками, к модулю 160 управления складывающимися законцовками, к третьему модулю управления складывающимися законцовками и т.д. и/или к тому и другому.
[00149] На ФИГ. 13 показана блок-схема приведенной в качестве примера процессорной платформы 1300, выполненной с возможностью исполнения инструкций для реализации способов по ФИГ. 3-12 и устройства по ФИГ. 2А и 2В. Процессорная платформа 1300 может представлять собой, например, сервер, промышленный компьютер или вычислительное устройство любого другого типа.
[00150] Процессорная платформа 1300 согласно показанному примеру включает в себя процессор 1312. Процессор 1312 согласно показанному примеру выполнен в виде аппаратных средств. Например, процессор 1312 может быть реализован посредством одной или более интегральных схем, логических схем, микропроцессоров или контроллеров любого необходимого бренда или изготовителя.
[00151] Процессор 1312 согласно показанному примеру включает в себя локальную память 1313 (например, кэш-память). Процессор 1312 согласно показанному примеру исполняет инструкции для реализации приведенных в качестве примера модулей 158, 160 управления складывающимися законцовками. Процессор 1312 согласно показанному примеру имеет связь с основной памятью, включая энергозависимую память 1314, энергонезависимую память 1316, посредством шины 1318. Энергозависимая память 1314 может быть реализована посредством синхронного динамического ОЗУ (SDRAM), динамического ОЗУ (DRAM), динамической памяти с произвольным доступом от компании RAMBUS (RDRAM) и/или посредством запоминающего устройства с произвольным доступом любого другого типа. Энергонезависимая память 1316 может быть реализована посредством флэш-памяти и/или запоминающего устройства любого другого типа. Доступом к основной памяти 1314,1316 управляет контроллер памяти.
[00152] Процессорная платформа 1300 согласно показанному примеру также включает в себя интерфейсную схему 1320. Интерфейсная схема 1320 может быть реализована посредством стандартного интерфейса любого типа, такого как Ethernet интерфейс, универсальная последовательная шина (USB) и/или экспресс-интерфейс PCI.
[00153] В показанном примере одно или более устройств 1322 ввода соединены с интерфейсной схемой 1320. Устройство (устройства) 1322 ввода позволяет (позволяют) пользователю вводить данные и команды в процессор 1312. Устройство (устройства) ввода может быть реализовано, например, посредством клавиатуры, кнопки, мыши, сенсорного экрана, сенсорной площадки, шарового манипулятора, манипулятора типа isopoint и/или системы распознавания голоса.
[00154] Одно или более устройств 1324 вывода также соединены с интерфейсной схемой 1320 согласно показанному примеру. Устройства 1324 вывода могут быть реализованы, например, посредством устройств отображения (например, светоизлучающего диода (LED), органического светоизлучающего диода (OLED), жидкокристаллического дисплея, дисплея с электронно-лучевой трубкой (CRT), сенсорного экрана, тактильного устройство вывода, принтера и/или динамиков). Интерфейсная схема 1320 согласно показанному примеру, таким образом, обычно включает в себя карту с графическим драйвером, чип с графическим драйвером или процессор с графическим драйвером.
[00155] Интерфейсная схема 1320 согласно показанному примеру также включает в себя устройство связи, такое как передатчик, приемник, приемопередатчик, модем и/или сетевую интерфейсную плату для обеспечения обмена данными с внешними машинами (например, вычислительными устройствами любого типа) через сеть 1326 (например, соединение Ethernet, цифровую абонентскую линию (digital subscriber line, DSL), телефонную линию, коаксиальный кабель, систему сотовой телефонии и т.д.).
[00156] Процессорная платформа 1300 согласно показанному примеру также включает в себя одно или более запоминающих устройств 1328 большой емкости для хранения программного обеспечения и/или данных. Примеры таких запоминающих устройств 1328 большой емкости включают в себя дисководы гибких дисков, накопители на жестких магнитных дисках, приводы компакт-дисков, приводы компакт-дисков формата Blu-Ray, системы типа RAID на основе независимых дисковых накопителей с избыточностью и приводы компакт-дисков формата DVD. Приведенное в качестве примера запоминающее устройство 1328 большой емкости реализует пример базы данных 270.
[00157] Кодированные инструкции 1332 для реализации способов по ФИГ. 3-12 могут быть сохранены в запоминающее устройство 1328 большой емкости, в энергозависимой памяти 1314, в энергонезависимой памяти 1316 и/или на съемном материальном компьютерочитаемом носителе для хранения, таком как компакт-диск или диск DVD.
[00158] Из указанного выше следует, что раскрытый выше модуль управления складывающимися законцовками и способы обеспечивают получение информации о состоянии, соответствующем раскрытому выше устройству складывающихся законцовок и, в целом, системе управления процессами летательного аппарата. Таким образом, раскрытые выше устройство модуля управления складывающимися законцовками и способы обеспечивают выработку последовательности этапов и событий, подлежащих последовательному выполнению для автоматического складывания и выдвижения раскрытого выше устройства складывающихся законцовок на основании полученной информации о состоянии.
[00159] Хотя в настоящем документе раскрыты некоторые приведенные в качестве примеров способы, устройства и изделия, объем данного патента ими не ограничен. Напротив, этот патент охватывает все способы, устройства и изделия, в достаточной степени охватываемые объемом формулы изобретения по данному патенту.
Реферат
Группа изобретений относится к устройству и способу управления приводной системой складывающихся законцовок крыльев летательного аппарата и ее мониторинга, материальному компьютерочитаемому носителю информации, содержащему инструкции для реализации способа. Устройство содержит модуль сбора информации об этапе полета летательного аппарата и модуль управления. Для управления приводной системой складывающихся законцовок крыльев летательного аппарата получают информацию об этапе полета летательного аппарата, вычисляют первое положение узла складывающихся законцовок, определяют действия во время первого и второго этапов управления, определяют состояние компоненты узла складывающихся законцовок и производят его перемещение посредством исполнения инструкций процессором. Обеспечивается возможность удлинения крыльев летательного аппарата на определенных этапах полета. 3 н. и 15 з.п. ф-лы, 13 ил.
Комментарии