Многофункциональная энергосберегающая система для транспортных средств - RU2088431C1
Код документа: RU2088431C1
Чертежи














Описание
Изобретение относится к многофункциональной энергосберегающей системе для транспортных средств, которая состоит из устройства автоматического сцепления, расположенного в системе привода транспортного средства, и устройства управления для выбора режима работы многофункциональной энергосберегающей системы.
Во всех современных транспортных средствах двигатель находится в жестком соединении с ведущими колесами, пока педаль сцепления не выжата и трансмиссия на смещение в свободное положение. Это приводит к так называемому "обратному приводу" когда транспортное средство перемещается в режиме наката. Здесь термин "обратный привод" означает, что двигатель приводится колесами вследствие кинетической энергии транспортного средства. Обратный привод поглощает большое количество кинетической энергии транспортного средства и приводит к таким проблемам, как дополнительный износ, укороченный срок службы и дополнительное потребление транспортным средством топлива. Поэтому с точки зрения экономики, энергосбережение и развитие промышленности производства транспортных средств является не только необходимым, но также очень важным для решения упомянутых выше проблем, возникающих при обратном приводе.
Существующее решение проблем обратного привода представляет собой целесообразное позволение транспортному средству перемещаться в режиме наката смещением трансмиссии транспортного средства в свободное положение.
Такое решение, однако, не используется широко, или так как оно должно быть использовано, из-за того, что целесообразное перемещение транспортного средства накатом ограничено несколькими факторами и эффект не удовлетворителен. Кроме того, существует предубеждение, которое оказывает влияние на безопасность вождения.
С другой стороны, обычные дифференциалы передач планетарного типа, используемые в современных транспортных средствах, не могут препятствовать скольжению колес на скользком грунте и проходимость ведущего колеса, оборудованного таким дифференциалом, может значительно уменьшиться, даже упасть до нуля, так что транспортное средство не может двигаться вперед или назад. Для того, чтобы преодолеть недостаток дифференциала с планетарной передачей, существующее решение должно быть обеспечено блокировкой дифференциала, но такой дифференциал не может одновременно выполнять очень хорошо функции противоскольжения и дифференциала.
Кроме того, переход от функции противоскольжения и функции дифференциала может быть сделан только когда транспортное средство остановлено. Это неудобно и увеличивает потерю мощности. Хотя дифференциалы с зубчатой обгонной муфтой и дифференциалы с повышенным трением кулачкового типа могут предотвращать скольжение достаточно хорошо, они не нашли широкого применения вследствие сложности их конструкции и высокой стоимости.
Проблемы, возникающие при обратном приводе, существуют во всех транспортных средствах, оборудованных обычными дифференциальными и такие транспортные средства не имеют той функции, что всякий раз, когда транспортное средство перемещается в режиме наката, двигатель мог бы автоматически выходить из сцепления с ведущими колесами и накат транспортного средства мог автоматически выходить из сцепления с ведущими колесами и накат транспортного средства мог бы выполняться автоматически.
Задача изобретения обеспечение транспортных средств многофункциональной энергосберегающей системой для преодоления проблем, возникающих при обратном приводе.
Другой задачей изобретения является обеспечение транспортных средств многофункциональной энергосберегающей системой, в которой блок автоматического сцепления с функциями дифференциала и предотвращения скольжения располагается в месте исходного дифференциала транспортного средства, и который будет также функционировать для решения проблем, возникающих при обратном приводе.
В соответствии с первым аспектом изобретения многофункциональная энергосберегающая система для транспортных средств состоит из устройства автоматического сцепления и устройства управления.
Устройство автоматического сцепления может быть размещено в любом приемлемом месте системы привода любого доступного транспортного средства или вновь разрабатываемого
транспортного средства содержит:
элемент привода;
ведомый элемент;
вал, жестко соединенный с или выполненный заодно с элементом привода и имеющий в основном регулярный
призматический участок концентричный с ним;
ступицу, соединенную с или выполненную заодно с ведомым элементом, и установленную концентрично на указанном валу с помощью подшипников, причем
указанный регулярный призматический участок расположен внутри ступицы;
синхронный каркас, который опирается на осевые концы вала между внутренней поверхностью ступицы и указанным регулярным
призматическим участком с возможностью вращения и имеет отверстия равномерно распределенные по периферии каркаса, причем число указанных отверстий равно числу боковых поверхностей указанного
призматического регулярного участка вала;
элемент, передающий крутящий момент, предусмотренный в каждом указанном отверстии с зазором между ними и имеющий возможность перемещения относительно
боковой поверхности указанного регулярного призматического участка между первым положением вблизи одного конца соответствующего дугообразного пространства, ограниченного внутренней поверхностью
ступицы и боковой поверхностью указанного регулярного призматического участка, и вторым положением вблизи другого конца указанного дугообразного пространства, причем каждый элемент, передающий
крутящий момент, имеет такие размеры, что, когда он находится в среднем положении между указанными первым и вторым положениями, ступицы выведена из сцепления с валом и крутящий момент не передается
между валом и ступицей, а когда он находится в указанном первом положении или в указанном втором положении, ступица находится с валом и крутящий момент передается между валом и ступицей через элемент,
передающий крутящий момент;
средство удержания каждого элемента, передающего крутящий момент, в указанном среднем положении, когда указанный вал вращается со скоростью меньшей скорости
холостого хода, соответствующей числу оборотов двигателя на холостом ходу, или не вращается, причем каждый указанный элемент, передающий крутящий момент, перемещается в указанное первое положение
вследствие инерционного отставания от вала, когда элемент привода начинает вращаться в прямом направлении (соответствующем движению транспортного средства вперед);
средство ограничения
каждого элемента, передающего крутящий момент, в указанном среднем положении, когда скорость элемента привода становится меньше скорости ведомого элемента только в указанном прямом направлении;
средство принуждения синхронного каркаса поворачиваться вместе со ступицей какое-то время для вынуждения каждого элемента, передающего крутящий момент, перемещаться из указанного среднего
положения в одно из указанных первое или второе положения.
Устройство управления для выбора режима работы многофункциональной энергосберегающей системой для транспортных средств может управлять работой указанного средства принуждения по требованию в любое время.
В особых вариантах воплощения многофункциональной энергосберегающей системы для транспортных средств в соответствии с настоящим изобретением упомянутые выше различные средства системы могут иметь различные формы и конструкции.
Указанное средство удержания может иметь магнит, располагаемый в середине каждой боковой поверхности указанного регулярного призматического участка вала, или две эластичные петли соответствующей обмотки вокруг обоих аксиальных концов указанных элементов, передающих крутящий момент. С другой стороны, указанное средство удержания может также содержать пружины растяжения, соединенные между синхронным каркасом и регулярным призматическим участком вала и средство скольжения по типу ласточкина хвоста между каждым указанным элементом, передающим крутящий момент, и регулярным призматическим участком.
В одном из вариантов
воплощения системы указанное средство ограничения содержит:
по меньшей мере два паза равномерно распределенных по периферии синхронного каркаса;
выемки, сформированные в указанном
валу, каждая из которых связана с одним из указанных пазов и имеет радиальную стенку;
отверстие, сформированного в дне каждого паза и обеспечивающее связь с одной из указанных выемок;
магнит, установленный на дне каждого указанного паза и качающийся рычаг, шарнирно установленный в каждом указанном пазу и имеющий пружину, которая закреплена с одного конца качающегося рычаг и
простирается через указанное отверстие, причем указанный качающийся рычаг расположен так, что, когда указанный вал вращается со скоростью меньшей заданной величины или не вращается, качающийся рычаг
удерживается на дне указанного паза с помощью указанного магнита, приводя к тому, что указанная пружина располагается вне указанной выемки в указанном валу, а когда скорость указанного вала достигает
указанной величины, качающийся рычаг поворачивается, преодолевая силу притяжения магнита вследствие воздействия центробежной силы, приводя в тому, что указанная пружина входит в указанную выемку, при
этом жесткость пружины гарантирует то, что пружина может упираться в указанную радиальную стенку указанной выемки, чтобы ограничить элемент, передающий крутящий момент, непосредственно в среднем
положении во время перемещения элемента, передающего крутящий момент, из указанного первого положения в указанное второе положение всякий раз, когда скорость указанного вала становится меньшей
скорости указанной ступицы, и что, когда указанное средство принуждения вынуждает синхронный каркас поворачиваться вместе со ступицей, пружина может быть отклонена указанной радиальной стенкой, чтобы
дать возможность элементу, передающему крутящий момент переместиться из указанного среднего положения в указанное второе положение.
В другом варианте воплощения указанное средство
ограничения содержит:
по меньшей мере два паза, равномерно распределенные по периферии указанного вала;
магнит, предусмотренный на дне каждого паза;
стопор, предусмотренный
на внутренней поверхности синхронного каркаса;
качающийся рычаг, шарнирно смонтированный в каждом указанном пазу и имеющий стакан, элемент, скользящий внутри стакана и пружину,
подпружинивающую указанный скользящий элемент в выступающее положение, причем каждый качающийся рычаг расположен так, что когда указанный вал вращается со скоростью меньшей предварительно заданной
величины или не вращаются, качающийся рычаг удерживается на дне указанного паза посредством указанного магнита, а скользящий элемент в указанном выступающем положении не препятствует или мешает
повороту синхронного каркаса относительно вала, а когда скорость указанного вала достигает указанной заданной величины, качающийся рычаг поворачивается вследствие центробежной силы, так что скользящий
элемент в указанном выступающем положении приходит в контакт с внутренней поверхностью синхронного каркаса, при этом жесткость указанной пружины гарантирует то, что скользящий элемент остается в
указанном выступающем положении и может упираться в указанный стопор, предусмотренный на внутренней поверхности синхронного каркаса, чтобы ограничить элемент, передающий крутящий момент,
непосредственно в указанном среднем положении в процессе перемещения указанного элемента, предающего крутящий момент, из указанного первого положения в указанное второе положение всякий раз, когда
скорость указанного вала становится меньше скорости ступицы, и что скользящий элемент может утапливаться назад в указанный стакан с помощью указанного стопора, чтобы дать возможность элементу,
передающему крутящий момент, переместиться из указанного среднего положения в указанное второе положение, когда указанное средство принуждения вынуждает синхронный каркас поворачиваться вместе со
ступицей.
В другом варианте воплощения указанное средство ограничения содержит;
по меньшей мере два отверстия в вале, причем оси этих отверстий лежат в плоскости
перпендикулярной оси вала;
магнит, установленный на дне каждого указанного отверстия в валу;
стопор, предусмотренный на внутренней поверхности синхронного каркаса;
штырь
перемещаемый в осевом направлении в каждом указанном отверстии, причем внешний коней каждого указанного штыря имеет форму усеченного конуса и каждый указанный штырь расположен так, что, когда вал
вращается со скоростью меньшей предварительно заданной величины или не вращаться, штырь удерживается на дне указанного отверстия с помощью указанного магнита, не мешая повороту синхронного каркаса
относительно вала, а когда скорость указанного вала достигает указанной заданной величины, штырь преодолевает силу притяжения указанного магнита, приходя в контактирование с внутренней поверхностью
синхронного каркаса вследствие центробежной силы, при этом сочетание угла конуса внешнего конца штыря и направления отверстий, простирающихся в указанной плоскости перпендикулярной оси вала,
гарантирует то, что внешний конец штыря может упираться против указанного стопора, предусмотренного на внутренней поверхности синхронного каркаса без утапливания назад в отверстие указанным стопором,
чтобы ограничить элемент, передающий крутящий момент, непосредственно в указанном среднем положении в процессе перемещения элемента, передающего крутящий момент, из указанного первого положения в
указанное второе положение всякий раз, когда скорость вала становится меньшей скорости ступицы, и когда указанное средство принуждения вынуждает синхронный каркас поворачиваться вместе со ступицей,
штырь может быть утоплен назад в отверстие указанным стопором, преодолевая силу статического трения между штырем и отверстием, чтобы дать возможность элементу, передающему крутящий момент,
перемещаться из указанного среднего положения в указанное второе положение.
В одном из вариантов воплощения указанное средство принуждения содержит;
исполнительный механизм,
закрепляемый на неподвижном элементе транспортного средства и управляемый указанным устройством управления;
фрикционный элемент, приспособленный сцепляться с синхронным каркасом;
узел привода, предусмотренный на ступице для передачи усилия указанного исполнительного механизма указанному фрикционному элементу, так что фрикционный элемент может сцепляться с синхронным
каркасом.
Указанным исполнительным механизмом может быть электромагнит, гидравлический цилиндр или пневматический цилиндр.
В упрощенном варианте воплощения указанное устройство управления содержит кнопочный переключатель для управления работой указанного исполнительного механизма.
Устройство управления может дополнительно содержать:
первый
переключатель для выбора режима работы системы;
схему задержки, приспособленную включаться другим переключателем, соединенным с педалью акселератора транспортного средства для подключения
указанного исполнительного механизма к источнику питания, чтобы привести двигатель в сцепление с ведущими колесами, когда педаль акселератора не нажата.
Кроме того, устройство
управления может дополнительно содержать;
переключатели для выбора режима работы системы;
первую схему задержки, приспособленную управляться другим переключателем, соединенным с
педалью акселератора транспортного средства для подключения указанного исполнительного механизма к источнику питания, чтобы привести двигатель в сцепление с ведущими колесами, когда педаль
акселератора не нажата;
вторую схему задержки, приспособленную управляться указанным другим переключателем, соединенным с педалью акселератора для выключения съемы зажигания двигателя, когда
педаль акселератора не нажата, и для включения схемы зажигания и подключения указанного исполнительного механизма к источнику питания, чтобы привести к сцеплению двигателя с ведущими колесами в
течение периода задержки при размыкании указанной второй схемы задержки, так, чтобы привести в движение двигатель и повторно запустить с помощью колес, когда педаль акселератора снова выжата.
Далее представлена работа системы в соответствии с первым аспектом изобретения.
Когда элемент привода не вращается, элементы, передающие крутящий момент, удерживаются в указанном среднем положении. Когда элемент привода начинает вращаться в прямом направлении (соответствующем движению транспортного средства вперед), синхронный каркас гарантирует то, что все элементы, передающие крутящий момент, синхронно перемещаются из среднего положения в первое положение из-за их инерционного запаздывания от вала при вращении. В этом случае элементы, передающие крутящий момент, заклиниваются между регулярным призматическим участком вала и внутренней поверхности ступицы вследствие статического трения, и, таким образом, вал вступает в сцепление со ступицей через элементы, передающие крутящий момент, так, что крутящий момент передается от двигателя транспортного средства ведущим колесам с помощью системы привода. После того, как вал достигнет предварительно заданной скорости и если скорость элемента привода становиться меньшей скорости ведомого элемента, синхронный каркас вместе с элементами, передающими крутящий момент, будет перемещаться из первого положения направлении второго положения вследствие их инерции.
Однако в процессе этого движения устройство ограничения будет ограничивать элементы, передающие крутящий момент, непосредственно в среднем положении, так что вал выходит из сцепления со ступицей и крутящий момент не передается от ведущих колес транспортного средства двигателя. В этом случае транспортное средство перемещается в режиме наката, полностью используя кинетическую энергию транспортного устройства и проблемы, возникающие в результате обратного привода, достаточно хорошо исключается.
Когда транспортное средство движется накатом по скользкому грунту или вниз по длинной пологой дороге, нет необходимости тормозить транспортное средство сцепления двигателя с ведущими колесами для безопасности вождения. В этом случае средство принуждения может работать сколько-то в любое время, как потребует устройство управления, так что элементы, передающие крутящий момент перемещаются из среднего положения во второе положение и вал может иметь обратный привод ступицей. В этом случае эффект торможения транспортного средства может быть улучшен для безопасности вождения.
С другой стороны, когда элемент привода начинает вращаться из состояния покоя в обратном направлении (соответствующем движению транспортного средства назад), синхронный каркас вместе с элементами, передающими крутящий момент, будут двигаться из среднего положения во второе положение из-за их инерционного отставания от вращающегося вала и, таким образом, вал входит в сцепление со ступицей, так что крутящий момент может передаваться от двигателя к ведущим колесам и транспортное средство может двигаться назад.
В соответствии со вторым аспектом изобретения многофункциональная энергосберегающая система состоит из блока автоматического сцепления, который расположен в месте исходного дифференциала транспортного средства, и устройства управления, которое подобно устройству управления системы в соответствии с первым аспектом изобретения.
Блок автоматического сцепления состоит из двух частей, которые подобны устройству сцепления системы в соответствии с первым аспектом изобретения и симметричны друг другу в отношении промежуточного поперечного сечения фланца, который используется в качестве обычного элемента привода двух частей.
Указанный фланец соединен с ведомым коническим зубчатым колесом последней ступени редуктора и ступицы обеих частей блока автоматического сцепления соединяются соответственно с полуосями на обоих сторонах транспортного средства.
Когда двигатель приводит транспортное средство в движение вдоль прямолинейной дороги, ступицы блока автоматического сцепления на обеих сторонах вращаются с одинаковой скоростью, равной скорости вращения вала, поскольку они находятся в сцеплении с одним и тем же валом.
Когда двигатель приводит транспортное средство в движение вдоль криволинейной части дорого, ступица блока автоматического сцепления на внутренней стороне находится в сцеплении с валом и вращаться вместе с валом, а ступица на внешней стороне выведена из сцепления свалом, поскольку она ведома колесом внешней стороны, чтобы вращаться с большой скоростью, чем вал.
Кроме того, независимый уровень сцепления ведущего колеса на любой стороне никогда не приведет к такому положению, что когда колесо на одной стороне будет скользить, в то время как колесо на другой стороне не вращается, поскольку ступицы на обеих сторонах крепятся к одному валу. В этом случае система в соответствии со вторым аспектом настоящего изобретения может не только преодолевать проблемы, возникающие при обратном приводе, но также функционировать как дифференциал с хорошей характеристикой противоскольжения.
Предлагаемое изобретение станет более понятным при рассмотрении следующего описания предпочтительных вариантов его воплощения с помощью
примера, сопровождающегося чертежами, на которых:
фиг. 1 схематическая многофункциональная энергосберегающая система в соответствии с первым аспектом изобретения;
фиг. 2 в
перспективе с пространственным разделением деталей основная конструкция системы в соответствии с первым аспектом изобретения;
фиг. 3 сечение А-А на фиг. 1;
фиг. 4 то же, частичный
вид, другие рабочие положения элементов, передающих крутящий момент для устройства автоматического сцепления, показанного на фиг. 1;
на фиг. 5 сечение В-В на фиг. 1, показывающее конструкцию
средства ограничения элементов6 передающих крутящий момент, непосредственно в среднем положении, когда скорость элемента привода становится меньшей скорости ведомого элемента при прямом направлении
вращения;
фиг. 6 то же частичный вид показано, что пружины, закрепленные на качающихся рычагах, упираются в радиальные стенки выемок в валу, и элементы, передающие крутящий момент,
непосредственно в среднем положении,
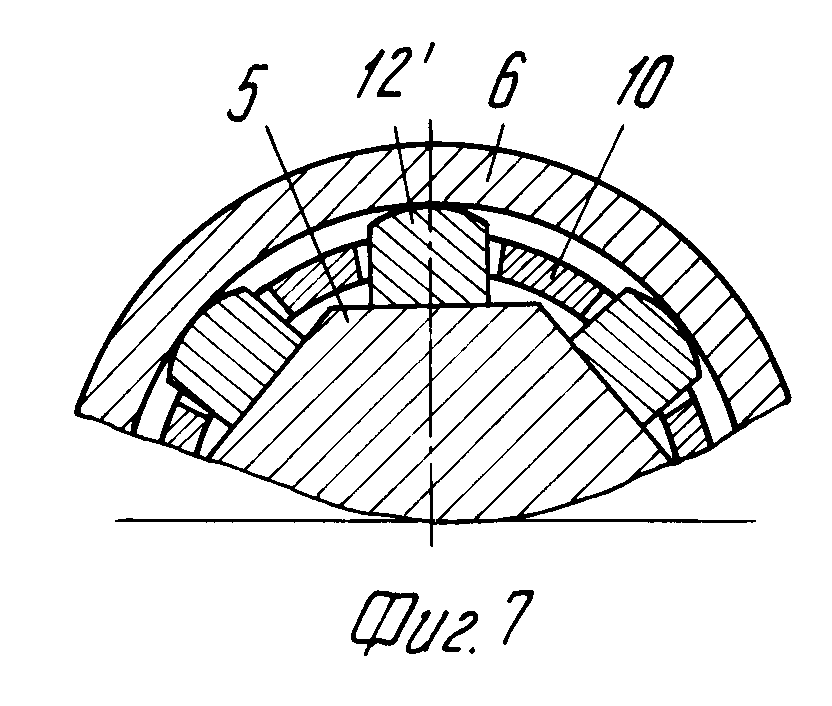
фиг. 7 другой вариант воплощения элементов, передающих крутящий момент;
фиг. 8 другой вариант, по существу регулярного призматического участка
вала;
фиг. 9 и 10 другой вариант воплощения средства удержания каждого элемента, передающего крутящий момент, в среднем положении, когда элемент привод вращения вращается со скоростью меньше
его скорости холостого хода или не вращается;
фиг. 11 дополнительный вариант воплощения средства удержания;
фиг. 12 другой вариант воплощения средства ограничения элементов,
передающих крутящий момент, непосредственно в среднем положении, когда скорость элемента привода становится меньшей скорости ведомого элемента в прямом направлении вращения;
фиг. 13 другой
вариант воплощения средства ограничения;
фиг. 14 другой вариант воплощения средства принуждения синхронного каркаса вращаться вместе со ступицей какое-то время, приводя каждый элемент,
передающий крутящий момент, к перемещению из среднего положения во второе положение;
фиг. 15 другой вариант воплощения средства принуждения;
фиг. 16 упрощенный вариант воплощения
устройства управления;
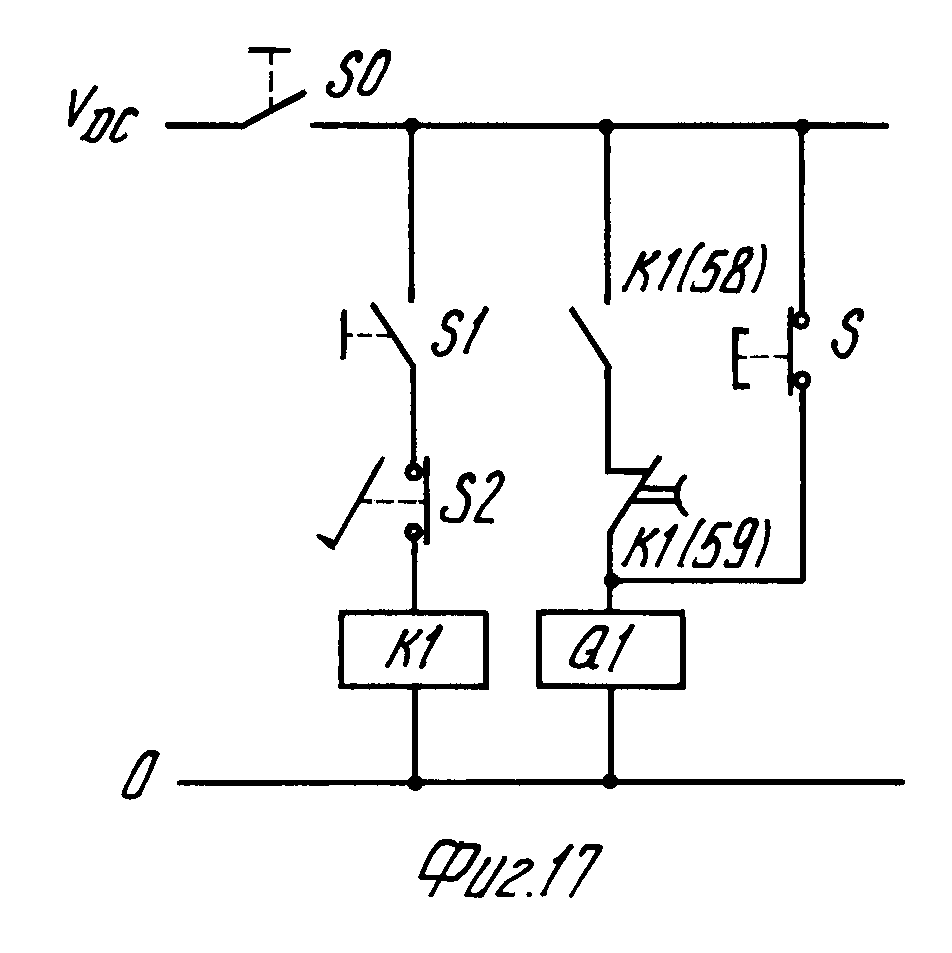
фиг. 17 другой вариант воплощения устройства управления;
фиг. 18 дополнительный вариант воплощения устройства управления;
фиг. 19 схематически систему
в соответствии со вторым аспектом изобретения, в котором блок автоматического сцепления расположен в месте исходного дифференциала транспортного средства.
Что касается чертежей, на которых подобными ссылочными номерами обозначены подобные или соответствующие детали на различных видах, то на фиг. 1 показана многофункциональная энергосберегающая система в соответствии с первым аспектом настоящего изобретения, включающая устройство 1 автоматического сцепления и устройство 2 управления.
В устройстве 1 автоматического сцепления элемент 3 привода выполнен в виде фланца, который жестко соединен с или выполнен заодно с валом 4. Вал 4 имеет, по существу, регулярный призматический участок 5 концентричный валу. Ступица 6 соединена с или выполнена заодно с ведомым элементом 7 и установлена концентрично на валу 4 с помощью подшипников 8 и 9. Регулярный призматический участок 5 вала 4 расположен внутри ступицы 6. Синхронный каркас 10 опирается с возможностью вращения на осевые концы вала 4 между внутренней поверхностью ступицы 6 и регулярным призматическим участком 5. Отверстия 11 (фиг. 2 и 3) равномерно распределены по периферии синхронного каркаса 10, а число отверстий 11 соответствует числу боковых поверхностей регулярного призматического участка 5. элемент 12, передающий крутящий момент, предусмотрен в каждом указанном отверстии 1 и имеет возможность перемещения по соответствующей боковой поверхности регулярного призматического участка 5 между первым положением 1 и вторым положением II (фиг. 4). Первое положение I и второе положение II находятся, соответственно, вблизи сужающихся концов дугообразного пространства, ограниченного внутренней поверхностью ступицы 6 и боковой поверхностью регулярного призматического участка 5. Каждый элемент 12, передающий крутящий момент, имеет такие размеры, что, когда он находится в среднем положении III (фиг. 4) между первым положением I и вторым положением II, ступица 6 выведена из сцепления с валом 4 и поэтому крутящий момент не передается между валом 4 и ступицей 6 через элементы 12, передающие крутящий момент.
Кроме того, предусмотрено средство удержания каждого элемента 12, передающий крутящий момент, в среднем положении III, когда на 4 вращается со скоростью, меньшей скорости его холостого хода или не вращается. Это средство удержания гарантирует то, что каждый элемент 12, передающий момент, не происходит в контактирование с внутренней поверхностью ступицы 6, когда транспортное средство движется накатом. Средство удержания, показанное на фиг. 1 и 3 в виде магнита 13, предусмотрено в середине каждой боковой поверхности регулярного призматического участка 5. Когда элемент 3 привода начинает вращаться в прямом направлении (соответствующем движению транспортного средства вперед), как показано стрелкой 14 (фиг. 4), синхронный каркас 10 гарантирует то, что каждый элемент 12, передающий крутящий момент, синхронно занимает первое положение I из-за инерционного запаздывания за валом 4 при вращении. С другой стороны, когда элемент 3 привод начинает вращаться в обратном направлении (соответствующем движению транспортного средства назад), синхронный каркас 10 гарантирует то, что каждый элемент 12, передающий крутящий момент, синхронно занимает второе положение 11.
Кроме того, предусмотрено средство ограничения каждого элемента 12, передающего крутящий момент, в среднем положении III, когда скорость элемента 3 привода становится меньше скорости ведомого элемента 7 только в указанном прямом направлении. Фиг. 1, 5 и 6 показывает особый вариант воплощения такого средства ограничения.
Как показано на фиг. 5, три паза 15 равномерно распределены по периферии синхронного каркаса 10. Три выемки 16 сформированы в виду 4, которые соответствуют пазам 15. Каждая выемка 16 имеет радиальную стенку 17. Отверстие 18 сформировано в донной части каждого паза 15 и служит для связи с одной из выемок 16. магнит 19 смонтирован на дне каждого паза 15. качающийся рычаг 20 шарнирно установлен в двух отверстиях 22, сформированных, соответственно, в противоположных сторонах стенок паза 15. Пружина 23 закреплена на одном конце каждого качающегося рычага 20 и простирается через отверстие 18. Каждый качающийся рычаг 20 расположен так, что, когда вал 4 вращается со скоростью меньшей заданной величины (например, предварительно заданная скорость транспортного средства может быть равной примерно 5 10 км/ч) или не вращается, качающийся рычаг 20 удерживается на дне паза 15 с помощью магнита 19, приводят к тому, что пружина 23 располагается вне выемки 16, как показано на фиг. 5, а когда скорость вала 4 достигает заданной величины, качающийся рычаг 20 поворачивается вокруг оси 21, преодолевая силу притяжения магнита 19 вследствие воздействия центробежной силы, в результате чего пружина 23 входит в выемку 16. Жесткость пружины 23 гарантирует то, что пружина 23 может упираться в радиальную стенку 17 выемки 16, как показано на фиг. 6, чтобы ограничить элемент 12, передающий крутящий момент, непосредственно в среднем положении III в процессе перемещения элемента 12, передающего крутящий момент, из первого положения 1 в направлении второго положения II вследствии инерции всякий раз, когда скорость вала 4 становится меньше скорости ступицы 6 и, что, когда средство принуждения, конструкция которого будет описана ниже6 вынуждает синхронный каркас 10 вместе с элементами 12, передающий крутящий момент, поворачиваться вместе со ступицей 6, пружина 23 может быть отклонена указанной радиальной стенкой 17, чтобы дать возможность каждому 12, передающему крутящий момент, переместиться из среднего положения III во второе положение II. Таким образом, вал 4 снова входит в сцепление со ступицей 6 и крутящий момент передается от ступицы 6 к валу 4 для торможения транспортного средства, или улучшения торможения для безопасности вождения.
Один вариант воплощения упомянутого выше средства принуждения показан на фиг. 1. По меньшей мере два электромагнитных устройства 24 равномерно распределены вокруг ступицы 6 и смонтированы соответственно на зафиксированном элементе транспортного средства и управляются с помощью устройства 2 управления. Когда электромагнитное устройство 24 подключено на какое-то время к источнику питания с помощью устройства 2 управления, диск 25, установленный с возможностью скольжения по ведомому элементу 7, притягивается электромагнитным устройством 24, так что фрикционный диск 26 закрепленный на основном диске 27 входит в торцевую поверхность синхронного каркаса 10 с тремя штырями 28, так что синхронный каркас 10 поворачивается вместе со ступицей 6 на некоторый угол, что приводит к тому, что элементы 12, передающие крутящий момент, перемещаются из среднего положения III во второе положение II. Штыри 28 закреплены одним концом на диске 25, а другим на диске 27. Штыри 28 простираются соответственно через три отверстия, 29, которые равномерно распределены по торцевой поверхности ступицы 6. Когда электромагнитное устройство 24 отключено от источника питания с помощью устройства 2 управления, диск 25 и фрикционный диск 26 возвращается в исходное положение посредством возвратных пружин 30, каждая из которых смонтирована на одном из штырей 28 между диском 25 и торцевой поверхностью ступицы 6. Элементы 12, передающие крутящий момент, будут оставаться во втором положении II до тех пор, пока скорость элемента 3 привода не станет больше скорости ведомого элемента 7.
В варианте воплощения системы в соответствии с первым вариантом настоящего изобретения, как показано на фиг. 1 6, элементы 12, передающие крутящий момент, имеют цилиндрическую форму, однако они могут иметь и другую форму. Например, поперечное сечение элементов 12, передающий крутящий момент, (фиг. 7), ограничено дугообразной и ломанной линией, чтобы увеличить их несущую способность.
Боковые поверхности регулярного призматического участка 5 вала 4 планарны. Вал прост по конструкции, прост в изготовлении и приспособлен к взаимодействию с элементами 12, передающими крутящий момент, имеющими более высокую несущую способность, как показано на фиг. 7. Угол клина для заклинивания элементов 12, передающих крутящий момент, в первом положении I или во втором положении II будет постепенно увеличиваться вследствие износа и задиров элементов 12, передающих крутящий момент, боковой поверхности регулярного призматического участка 5 и внутренней поверхности ступицы 6. Угол клина может стать слишком большим для заклинивания элементов 12, передающих крутящий момент, что приводит к отказу системы. Для преодоления этой проблемы может быть использован, по существу регулярный призматический участок, как показано на фиг. 8, боковые поверхности которого представляют собой логарифметический геликоид или цилиндрическую дуговую поверхность. При таком участке 5 угол клина, т.е. угол, образованный общей касательной проходящей через контактную точку между элементом 12, передающим крутящий момент, и внутренней поверхностью ступицы 6, и общей касательной, проходящей через точку контактирования элемента 12, передающего крутящий момент, и стороной участка 5, будет оставаться, по существу, неизменным и поэтому срок эксплуатации удлиняется.
На фиг. 9 и 10 показаны другие варианты воплощения средства удержания каждого элемента 12, передающего крутящий момент, в среднем положении III, когда элемент 3 привода вращается со скоростью меньше скорости вращения на холостом ходу или не вращается. В этом варианте воплощения средства удержания каждый элемент 12, передающий крутящий момент, имеет два коротких стержня 31, сформированных, соответственно, аксиально в центральных областях торцовых поверхностей элементов 12 передающих крутящий момент. Две эластичные панели 32, обернутые вокруг коротких стержней 31, соответственно, на обоих коаксиальных торцах элементов 12, передающих крутящий момент, чтобы удерживать элементы 12, передающие крутящий момент, в среднем положении III, т. е. радиально в самом среднем положении относительно боковых поверхностей регулярного призматического участка 5 или 5', когда элемент 3 привода вращается со скоростью меньшей, чем скорость при холостом ходе или не вращается.
Помимо этого на фиг. 11 показан дополнительный вариант воплощения средства удержания, в котором множество пружин растяжения 33, соответственно, установлено между регулярным призматическим участком 5 или 5' и синхронным каркасом 10 и средство скольжения типа ласточкина хвоста 67 между каждым указанным элементом 12, передающим крутящий момент, и регулярным призматическим участком, которое препятствует элементу 12, передающему крутящий момент, отклоняться от боковой поверхности регулярного призматического участка 5 в течение перемещения элемента 12, передающего крутящий момент, между первым положением 1 и вторым положением II.
Фиг. 12 показывает другой вариант воплощения средства ограничения. Как показано на фиг, 12, два паза 34 равномерно распределены по периферии вала 4 или круглого элемента (не показан), закрепленного на выступах вала 4. Магнит 35 смонтирован на дне каждого паза 34. Стопор 36 сформирован на внутренней поверхности синхронного каркаса 10. Качающийся рычаг 37 шарнирно смонтирован в каждом пазу 34 с помощью оси 38 подобно качающемуся рычагу показанному на фигурах 1 5. Каждый качающийся рычаг 37 содержит стакан 39, элемент 40, аксиально скользящий, внутри стакана 39 и пружину 41, подпружинивающую скользящий элемент 40 и выступающее положение, как показано. Каждый качающийся рычаг 37 расположен так, что, когда вал 4 вращается со скоростью меньшей заданной величины или не вращаются, качающийся рычаг 37 удерживается на дне паза 34 посредством магнита 25 и скользящий элемент 40 в выступающем положении не мешает повороту синхронного каркаса 10 относительно вала 3, а когда скорость вала 4 достигнет заданной величины, качающийся рычаг 37 будет отклоняться, поворачиваясь вокруг оси 38 вследствие центробежной силы, так что скользящий элемент 40 или выступающем положении приходит в контакт с внутренней поверхностью синхронного каркаса 10. Жесткость пружины 41 гарантирует то, что скользящий элемент 40 остается в выступающем положении и упирается в стопор 36 на внутренней поверхности синхронного каркаса 10, чтобы ограничить элемент 12, 12' и 12'', передающий крутящий момент, непосредственно в среднем положении III в процессе перемещения этого элемента, из первого положения I во второе положение II всякий раз, когда скорость вала 4 становится меньшей скорости ступицы 6, и что скользящий элемент 40 может быть утоплен в стакан 39 стопором 36, чтобы дать возможность элементу 12, 12' или 12'', передающему крутящий момент, перемещаться из среднего положения III во второе положение III, когда средство принуждения вынуждает синхронный каркас 10 поворачиваться вместе со ступицей 6.
Кроме того, фиг. 13 показывает дополнительный вариант воплощения средства ограничения. Как показано на фиг. 13, два отверстия 42 сформированы в валу 4 и оси обеих отверстий 42 лежат в одной плоскости перпендикулярной оси вала 4. Магнит 43 смонтирован на дне каждого отверстия 42. Стопоры 44 предусмотрены на внутренней поверхности синхронного каркаса 10. Штырь 45 установлен с возможностью перемещения в каждом отверстии 42. Внешний конец каждого штыря имеет форму усеченного конуса. Каждый штырь 45 расположен так, что, когда скорость вала 4 меньше заданной величины или вал не вращается, штырь 45 удерживается на дне отверстия 42 посредством магнита 43, не мешая повороту синхронного каркаса 10 относительно вала 4, а когда скорость вала достигнет заданной величины, штырь преодолевая силу притяжения магнита 43, приходит в контактирование с внутренней поверхностью синхронного каркаса 10 вследствие центробежной силы. Сочетание угла конуса внешних концов штырей 45 и направления отверстий 42 в плоскости, перпендикулярной оси вала 4 гарантирует то, что внешние концы штырей 45 могут упираться в стопор 44 на внутренней поверхности синхронного каркаса 10 без утапливания назад в отверстия 42 стопором 44, чтобы ограничить элементы 12, передающие крутящий момент, непосредственно в среднем положении III в процессе перемещения этих элементов, из первого положения I во второе положение II всякий раз, когда скорость вала 4 становится меньшей скорости ступицы 6, а штыри 45 могут быть утоплены в отверстия 42 стопорами 34 преодолевая силу статического трения, чтобы дать возможность элементам 12, передающим крутящий момент, переместиться из среднего положения III во второе положение II, когда средство принуждения вынуждает синхронный каркас 10 поворачиваться вместе со ступицей 6.
Фиг. 14 показывает другой вариант воплощения средства принуждения. Как показано на фиг. 14, имеется два штока 48, каждый из которых имеет на своем конце фрикционный элемент 47, приспособленный сцепляться с синхронным каркасом 10. Штоки 46 простираются, соответственно, через отверстие 48 в кружке 49, закрепленной на внешней поверхности ступицы 6 и отверстие 50 в ступице 6 для поворота вместе со ступицей 6. штоки 47 расположен так, что когда они приводятся в движение известным исполнительным механизмом ( не показан), получившим сигнал от системы управления на перемещение в направлении, указанном стрелками 51, фрикционные элементы 47 сцепляются с синхронным каркасом 10, так что последний поворачивается вместе со ступицей 6 на некоторый угол, приводя к тому что элементы 12, передающие крутящий момент, перемещаются из среднего положения III во второе положение II. Штоки 46 и вследствие этого фрикционные элементы 47 вернуться в их исходное положение с помощью возвратных пружин 52, когда исполнительный механизм более не двигает штоки 46.
Фиг. 15 показывает дополнительный вариант воплощения средства принуждения, который пригоден для транспортных средств, имеющих электрический источник питания высокой мощности. Как показано на фиг. 15, дугообразная направляющая 53 жестко соединена с неподвижным конструктивным элементом транспортного средства. Радиальная направляющая 54 уравновешена в средней части дугообразной направляющей 53 с помощью двух пружин 55 и приспособлена к скольжению вдоль дугообразной направляющей 53, преодолевая воздействие пружин 55. Электромагнит 56 приспособлен для перемещения внутри радиальной направляющей 54. Пружина 57 обычно тянет электромагнит 56 в радиально внешнее положение, где последний находится в состоянии расцепления с внешней поверхностью ступицы 6. Когда электромагнит 56 подключается к источнику питания в ответ на сигнал устройства 2 управления системы, электромагнит 56 приходит в контактирование с внешней поверхностью ступицы 6, преодолевая усилие пружины 57, и перемещаться вместе со ступицей 6 на некоторое расстояние с радиальной направляющей 54, преодолевая усилие пружин 55, по направляющей 53, так что соответствующие элементы 12, передающие крутящий момент, приходят в контактирование с внутренней поверхностью ступицы 6 под действием притяжения магнита 56 и перемещаются вместе с электромагнитом 56 из среднего положения II во второе положение II, когда электромагнит отключается от источника питания в ответ на сигнал от устройства 2 управления системы, электромагнит 56 и радиальная направляющая возвращаются в исходные положения, соответственно, с помощью пружины 57 и пружины 55.
Фиг. 18 показывает упрощенный вариант воплощения устройства 2 управления системы в соответствии с настоящим изобретением. В схеме управления, показанной на фиг. 16, 0 обозначает главный переключатель транспортного средства, обозначат кнопочный переключатель, а I обозначает, что исполнительный механизм средства принуждения содержит, например, электромагнит, катушку возбуждения электромагнита или обозначает, что исполнительный механизм средства принуждения содержит, например, цилиндр, электромагнитный клапан управления цилиндром.
Когда транспортное средство оборудованное системой, согласно настоящему изобретению, движется и, если скорость 3 элемента автоматического сцепления становится меньше скорости ведомого элемента 7, первый будет автоматически выведен из сцепления с последним и транспортное средство будет двигаться в режиме наката, так что достигается сбережение энергии. И когда транспортное средство движется в режиме наката и если возникает необходимость сцепления двигателя с ведущими колесами для безопасности движения, кнопочный переключатель нажимается на какое-то время, так что средство принуждения вынуждает элементы 12, передающие крутящий момент, перемещаться из среднего положения III во второе положение II, как показано выше.
Фиг. 17 показывает другой вариант воплощения устройства 2 управления в соответствии с настоящим изобретением. В схеме управления, показанной на фиг. 17, 1 обозначает переключатель для выбора режима работы системы, 2 обозначает переключатель с размыкающимися контактами, соединенный с педалью акселератора, KI обозначает реле выдержки времени, имеющее замыкающий контакт KI (56) и размыкающий контакт KI (59) выдержки времени.
Когда переключатель I выключен, устройство 2 управления будет работать так, как описано при ссылке на фиг. 16. Когда переключатель 1 включен и педаль акселератора выката, элемент 3 привода будет вращаться с более высокой скоростью, чем ведомый элемент 7, так что элементы 12, передающие крутящий момент, перемещаются из среднего положения III либо во второе положение II, либо в первое положение I. В этом случае переключатель 2, соединенный с педалью акселератора размыкается, контакт К1 (58) размыкается, а контакт К1 (59) замыкается. Когда педаль акселератора освобождается, переключатель 2 замыкается, подключая реле К1 к источнику питания, так что К1 (58) замыкается, а контакт К1 (58) будет задерживать размыкание. В течение периода задержки контакта К1 (59) подключаются к источнику питания, так что средство принуждения вынуждает синхронный каркас 10 поворачиваться вместе со ступицей 6, приводя к тому, что элементы 12, передающие крутящий момент, перемещаться из первого положения 1 во второе положение II, поскольку скорость элемента 3 привода становится меньше скорости ведомого элемента 7 после того, как педаль акселератора освобождена. В этом случае двигатель тормозиться колесами, обеспечивая торможение транспортного средства или улучшение эффекта торможения.
Фиг. 16 показывает еще один вариант воплощения устройства 2 управления системы в соответствии с изобретением, которое применимо на транспортных средства с бензиновыми двигателями или в автомобилях с электродвигателем, и имеет следующие четыре режима работы.
Режим I.
Когда транспортное средство с бензиновым двигателем или автомобиль с электродвигателем оборудованы системой в соответствии с настоящим изобретением и двигаются, главный переключатель 0 находится в своем замкнутом состоянии.
Когда переключатель 1 разомкнут, а переключатель 3 находится в положении А, устройство управления работает подобно устройству управления показанному на фиг. 16, т. е. работа средства принуждения управляется только кнопочным переключателем.
Режим II.
Когда переключатель 1 замкнут, а переключатель 3 остается в положении А и, если педаль акселератора выката, реле 12 К2 подключается к источнику питания, так что его размыкающийся контакт К2 (60) размыкается. Если педаль акселератора теперь освобождается, реле 12 отключается от источника питания, так что его контакт К2 (60) замыкается, а реле К1 подключается в источнику питания, приводя к тому, что замыкающийся контакт К1 (61) замыкается, а размыкающийся контакт К1 (61) выдержки времени задерживает в размыкании и поэтому 1 подключается к источнику питания во время периода задержки контакта К1 (62). В результате средство принуждения вынуждает синхронный каркас 10 поворачиваться вместе со ступицей 6, приводя к тому, что элементы 12, передающие крутящий момент, перемещаются из первого положения 1 во второе положение II, поскольку скорость элемента 3 привода станет меньше скорости ведомого элемента 7 после того, как педаль акселератора освобождена. В этом случае двигатель тормозится колесами.
Режим III.
Когда переключатель 1 разомкнут, а переключатель 2 находится в положении В и когда педаль акселератора находится в выжатом положении, переключатель 2, соединенный с педалью акселератора, находится в своем замкнутом состоянии и реле К2 включено, так что его размыкающийся контакт К2 (65) находится в своем разомкнутом состоянии, а его замыкающийся контакт К2 (63) в своем замкнутом, состоянии, а его замыкающийся контакт К2 (63) в своем замкнутом, гарантируя то, что схема зажигания 2 двигателя включена.
Если педаль акселератора теперь освобождена, переключатель 2 размыкается и реле К2 отключается от источника питания6 так что контакт К2 (54) размыкается, контакт К2 (65) замыкается, а контакт К2 (63) размыкается, что приводит к выключению схемы зажигания 2 двигателя. В этом случае транспортное средство движется накатом так, что двигатель заглушен и элемент 3 привода устройства автоматического сцепления находится в состоянии отсутствия сцепления с ведомым элементом 7, так что может быть достигнут оптимальный энергосберегающий эффект. Если педаль акселератора снова нажата, реле К2 подключаются к источнику питания, так что контакт К2 (63) замыкается и схема зажигания 02 включается, между тем контакт К2 (64) замыкается, размыкающийся и задерживающий время контакт К2 (65) дает задержку в размыкании. Таким образом, 1 подключается к источнику питания в течение периода задержки контакта К2 (65), что приводит к тому, что элементы 12, передающие крутящий момент, перемещаются из второго положения II в первое положение 1 вследствие инерционного запаздывания синхронного каркаса 10 и элементов 12, передающих крутящий момент, за валом 4 во вращении.
Режим IV.
Когда переключатель 1 замкнут и переключатель 3 находится в положение В и когда педаль акселератора, находится в своем замкнутом положении и реле К2 включено, так что контакт К2 (64) находится в замкнутом положении, а контакт К2 (65) в разомкнутом положении, между тем контакт К2 (63) находится в своем замкнутом положении, гарантируя то, что схема зажигания 2 включена. Если педаль акселератора освобождается, переключатель 2 размыкается и реле К2 отключается от источника питания, так что контакт К2 (64) размыкается и контакт К2 (63) размыкается. Поэтому схема 2 выключается и двигатель глохнет, между тем К2 (60) замыкается и реле К1 подключается к источнику питания, так что контакт К1 (61) замыкается, а задерживающий время контакт время контакт К1 (62) делает задержку в размыкании. Таким образом, 1 подключается к источнику питания во время периода задержки контакта К1 (62), приводя к тому, что элементы 12, передающие крутящий момент, перемещаются из первого положения 1 во второе положение II, поскольку средства принуждения вынуждает синхронный каркас 10 поворачиваться вместе со ступицей 6. В этом случае транспортное средство движется так, что двигатель заглушен и приводится в обратном направлении колесами, поскольку элемент 3 привода устройства автоматического сцепления теперь находится в сцеплении с ведомым элементом 7 через элементы 12, передающие крутящий момент. Много больше кинетической энергии транспортного средства потребляется, когда двигатель заглушен, чем, когда он работает на холостом ходу, поэтому транспортное средство тормозится более эффективно. А если педаль акселератора наката снова6 переключатель 2, соединенный с педалью акселератора, замыкается, а реле К2 подключается к источнику питания, так что контакт К2 (63) замыкается, чтобы включить схему зажигания 2, контакт К2 (54) замыкается и контакт задержки времени К2 (65) задерживает размыкание. В результате 1 подключается к источнику питания во время периода задержки контакт К2 (65), так что двигатель приводится в движение и запускается колесами, как описано выше.
Факультативно размыкающийся контакт К2 (66) реле К2 может быть предусмотрен для управления индикаторной лампой 03 так, что индикаторная лампа 03 выключается пока педаль акселератора нажата и выключается на то время, пока педаль акселератора свободна, указывая на то, что транспортное средство движется в режиме наката.
Водитель транспортного средства может выбирать любой из четырех режимов работы
устройства 2 управления в соответствии с условиями движения. Когда выбран режим 1 или режим III, может быть получен эффект сбережения энергии. Предварительно испытания показали, что потребление
энергии транспортным средством может быть уменьшено на 18%
Прежде, чем описывать систему в соответствии со вторым аспектом изобретения, следует отметить, что когда для парковки транспортного
средства используют центральный тормоз, устройство автоматического сцепления должно быть расположено перед центральным тормозом в системе привода транспортного средства, иначе центральный тормоз может
утратить свою функцию. Например, ступица 6 устройство 1 автоматического сцепления должна быть жестко соединена с тормозной ступицей или диском для того, чтобы поддерживать функцию парковки
центрального тормоза.
Как показано на фиг. 19, многофункциональная энергосберегающая система в соответствии со вторым аспектом изобретения состоит из блока 1 автоматического сцепления и устройства 2 управления.
Блок 1 автоматического сцепления состоит из двух частей 1 а и 1 b. Обе эти части 1 а и 1 b подобны устройству автоматического сцепления системы в соответствии с первым аспектом настоящего изобретения и симметричны относительно поперечного фланца 3 использумого в качестве обычного элемента привода двух частей 1 а и 1 b. Фланец 3 жестко соединен с ведомым коническим зубчатым колесом 67 последней ступени редуктора системы привода транспортного средства и ступицы 6 а и 6 b обеих частей 1 а и b жестко соединены, соответственно, с полуосями на обеих сторонах транспортного средства.
Устройство управления системы в соответствии со вторым аспектом изобретения подобно устройству управления системы в соответствии с первым аспектом настоящего изобретения и может быть любым из устройств, описанных со ссылкой на фигуры 16-18.
Когда транспортное средство, оборудованное системой в соответствии со вторым аспектом настоящего изобретения, приводится в движение, двигателем вдоль прямолинейного участка дороги, ступицы 6 а и 6 b и блока 1 автоматического сцепления вращаются с одинаковой скоростью, поскольку они сейчас находятся в сцеплении с единым валом 4.
Когда транспортное средство приводится в движение двигателем вдоль криволинейного участка дороги, ступица 6 а и 6 b блока 1 автоматического сцепления на внутренней стороне кривизны дороги находится в сцеплении с валом 4, а другая ступица на внешней стороне дороги выведена из сцепления с валом 4, поскольку теперь она является ведомой колесом на внешней стороне дороги, чтобы вращаться более высокой скоростью, чем вал 4. Так может быть выполнена функция дифференциала.
Кроме того, приводящий крутящий момент может быть автоматически распределен от одного ведущего колеса с меньшей силой сцепления другому ведущему колесу с большей силой сцепления и никогда не будет иметь место то, что одно ведущее колесо скользит, в то время как другое ведущее колесо не вращается. Таким образом, особым достоинством системы в соответствии со вторым аспектом изобретения является то, что она не только может преодолевать проблемы, возникающие при обратном приводе, но также функционировать как дифференциал с хорошей характеристикой противоскольжения.
Конечно, изобретение не ограничено показанными вариантами воплощения. Будет понятно, что различные изменения и модификации могут быть проделены с этими вариантами без отклонения от существа и объема настоящего изобретения.
Реферат
Использование: многофункциональная энергосберегающая система для транспортных средств. Сущность изобретения: многофункциональная энергосберегающая система для транспортных средств состоит из устройства автоматического сцепления и устройства управления. Сущность изобретения: устройство автоматического сцепления в основном содержит вал с регулярным призматическим участком, ступицу, синхронный каркас с элементами, передающими крутящий момент. Когда скорость вала больше скорости ступицы, между ними передается крутящий момент с помощью элементов, передающих крутящий момент. Когда скорость вала меньше скорости ступицы, крутящий момент между ними не передается. Вал может приходить в сцепление со ступицей в любое время по требованию сигналом из устройства управления. С помощью системы потребления энергии может быть значительно сокращено. Когда в этой системе используют устройство автоматического сцепления симметричной конструкции, которую располагают в месте исходного дифференциала транспортного средства, устройство автоматического сцепления может дополнительно функционировать как дифференциал с характеристикой противоскольжения. 14 з. п. ф-лы, 19 ил.

Комментарии