Устройство диагностики неисправностей и способ диагностики неисправностей. - RU2678857C1
Код документа: RU2678857C1
Чертежи





Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству диагностики неисправностей, применимому к механическому устройству, содержащему электромотор в качестве источника для того, чтобы приводить в действие ось движения, и к способу означенного.
Уровень техники
[0002] Патентный документ 1 раскрыт в качестве традиционного способа диагностики неисправностей, применимого к промышленному роботу с шарнирными сочленениями. В способе диагностики неисправностей, раскрытом в патентном документе 1, позиция перемещения оси сочленения робота и возмущающий крутящий момент, прикладываемый к оси сочленения, обнаруживаются каждый предварительно определенный период в то время, когда робот работает, и среднее значение возмущающего крутящего момента получается для каждой обнаруженной позиции перемещения. Затем среднее значение сравнивается с заданным пороговым значением, и робот диагностируется как имеющий анормальность или неисправность, когда среднее значение превышает заданное пороговое значение. Как описано выше, традиционная технология спроектирована с возможностью диагностировать неисправность на основе определения в отношении того, превышает или нет возмущающий крутящий момент определенное заданное пороговое значение. Таким образом, анормальность в приводной системе робота вплоть до сегодняшнего дня обнаруживается независимо от положения движения робота или веса обрабатываемой детали и т.п., которая должна захватываться с помощью захвата робота.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер H 9-174482
Сущность изобретения
[0004] Тем не менее, если задача по техническому обслуживанию проводится таким образом, чтобы изменять вязкость смазки посредством изменения смазки в каждой оси движения, может иметь место то, что значение возмущающего крутящего момента варьируется вследствие эффекта задачи по техническому обслуживанию. В этом случае, длительная работа по диагностике неисправностей посредством использования определенного заданного порогового значения без исключения эффекта задачи по техническому обслуживанию по существу может приводить к частому возникновению диагностик как анормальных вместо нормальных, за счет этого вызывая проблему ухудшения точности диагностики неисправностей.
[0005] Между тем, также следует признать, что возмущающий крутящий момент не всегда затрагивается посредством каждой задачи по техническому обслуживанию. В этом отношении, существует другая проблема возникновения ошибки в обнаружении неисправности, когда заданное пороговое значение изменяется каждый раз, когда проводится задача по техническому обслуживанию.
[0006] Настоящее изобретение осуществлено с учетом вышеуказанных проблем, и его цель заключается в том, чтобы предоставлять устройство диагностики неисправностей и способ означенного, которые допускают повышение точности диагностики неисправностей посредством исключения эффекта задачи по техническому обслуживанию только тогда, когда проведенная задача по техническому обслуживанию имеет эффект на возмущающий крутящий момент.
[0007] Чтобы разрешать вышеуказанную проблему, в устройстве диагностики неисправностей и в способе означенного согласно одному аспекту настоящего изобретения, изменение значения возмущающего крутящего момента до и после проведения задачи по техническому обслуживанию вычисляется, когда задача по техническому обслуживанию проводится на оси движения. Затем пороговое значение определения неисправностей сбрасывается только тогда, когда изменение значения возмущающего крутящего момента превышает предварительно определенное пороговое значение.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, показывающей общую конфигурацию системы диагностики неисправностей согласно варианту осуществления настоящего изобретения.
Фиг. 2 является блок-схемой для пояснения процедур, чтобы получать возмущающий крутящий момент.
Фиг. 3 является схемой для пояснения изменения в значении возмущающего крутящего момента до и после проведения задачи по техническому обслуживанию.
Фиг. 4 является блок-схемой последовательности операций способа, показывающей процедуры обработки выбора возмущающего крутящего момента посредством устройства диагностики неисправностей согласно варианту осуществления настоящего изобретения.
Фиг. 5 является блок-схемой последовательности операций способа, показывающей процедуры обработки диагностики неисправностей посредством устройства диагностики неисправностей согласно варианту осуществления настоящего изобретения.
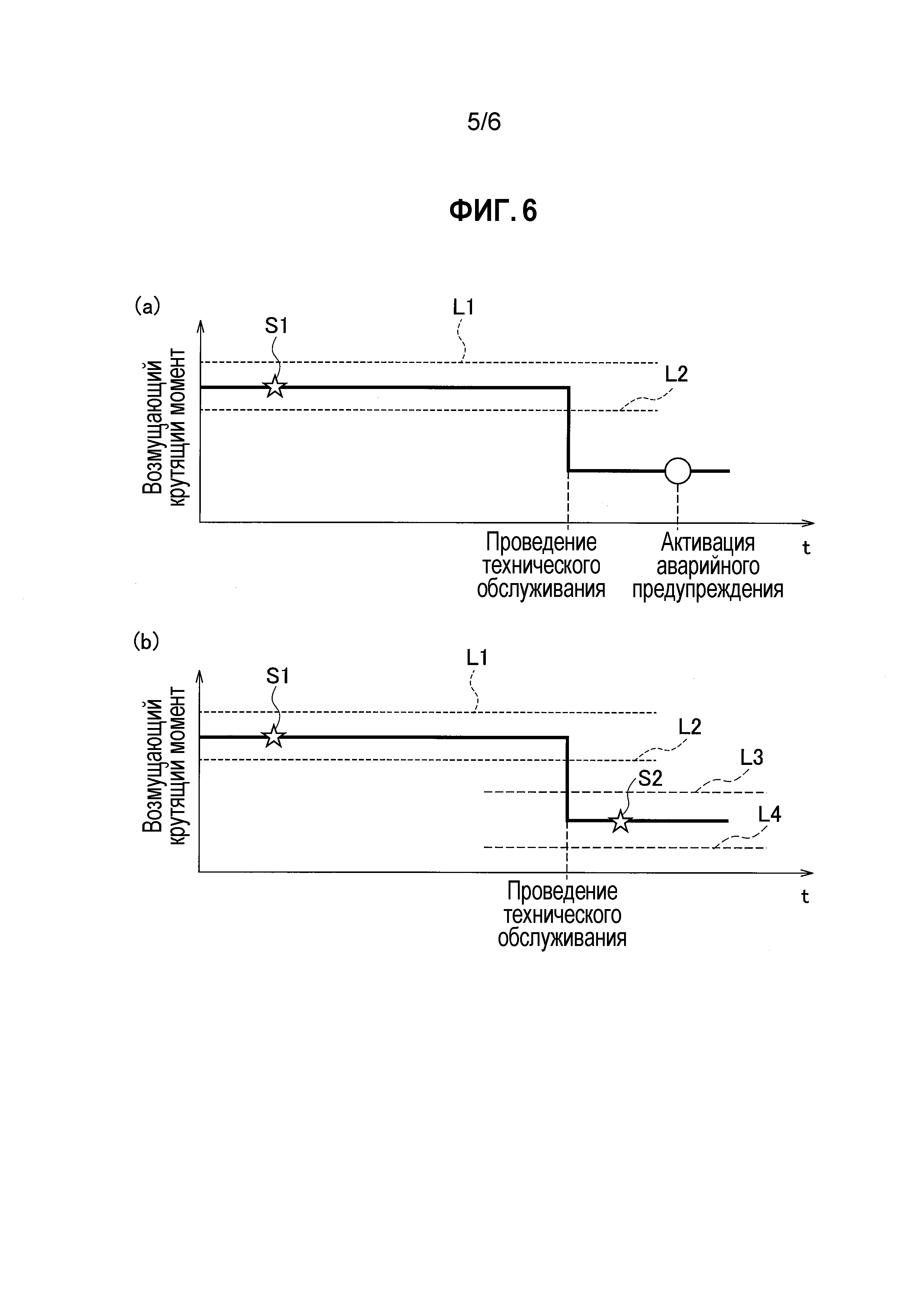
Фиг. 6 показывает схемы для пояснения эффекта устройства диагностики неисправностей согласно варианту осуществления настоящего изобретения.
Фиг. 7 показывает схемы для пояснения эффекта устройства диагностики неисправностей согласно варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0009] Ниже описывается вариант осуществления, применяющий настоящее изобретение, со ссылкой на чертежи. В описании чертежей, идентичные составляющие обозначаются посредством идентичных ссылок с номерами, и их пояснения опускаются.
[0010] Конфигурация системы диагностики неисправностей
Фиг. 1 является блок-схемой, показывающей конфигурацию системы диагностики неисправностей, включающей в себя устройство диагностики неисправностей согласно этому варианту осуществления. Как показано на фиг. 1, система 100 диагностики неисправностей этого варианта осуществления формируется из робота 1, устройства 2 управления робота, устройства 3 диагностики неисправностей и устройства 4 управления производством. В качестве примера механического устройства, робот 1 представляет собой робот из многоосной машины с воспроизведением по обучению, а также с шарнирными сочленениями. Однако робот 1 может быть одноосной машиной вместо многоосной машины.
[0011] Хотя робот 1 включает в себя множество систем моторного привода, служащих в качестве осей сочленения, которые являются осями движения, фиг. 1 иллюстрирует систему моторного привода только для одной оси. Манипулятор 5 робота приводится в действие посредством сервомотора 6 (в дальнейшем называемого просто "электромотором") через замедлитель 8. Импульсный кодер 7 (импульсный генератор или датчик позиции), представляющий собой детектор для позиции угла поворота и скорости, присоединяется к электромотору 6.
[0012] Устройство 2 управления робота включает в себя функциональный интегрированный модуль 9 управления, модуль 10 связи, модуль 11 сервоуправления и модуль 14 сервоусилителя. Модуль 11 сервоуправления включает в себя модуль 12 вычисления возмущающего крутящего момента и модуль 13 получения данных о состоянии и приводит в действие электромотор 6 через модуль 14 сервоусилителя посредством приема инструкции из функционального интегрированного хост-модуля 9 управления. Импульсный кодер 7, присоединяемый к электромотору 6, формирует контур обратной связи в сочетании с модулем 11 сервоуправления для обработки управления позицией угла поворота и скоростью электромотора 6.
[0013] В дополнение к модулю 12 вычисления возмущающего крутящего момента и модулю 13 получения данных о состоянии, модуль 11 сервоуправления включает в себя процессор, который выполняет обработку для позиции управления углом вращения, скорости и тока электромотора 6, ROM, которое сохраняет управляющую программу, и энергонезависимый модуль хранения, который сохраняет заданные значения и различные параметры. Кроме того, модуль 11 сервоуправления включает в себя RAM, которое временно сохраняет данные в ходе обработки вычисления, регистр для обнаружения абсолютной позиции угла поворота электромотора 6 посредством подсчета импульсов обратной связи по позиции из импульсного кодера 7 и т.п.
[0014] В этой связи, робот 1 включает в себя несколько сочленений и в силу этого стольких систем моторного привода, как проиллюстрировано на фиг. 1, сколько составляет число сочленений. Тем не менее, фиг. 1 иллюстрирует систему моторного привода только для одной оси, и иллюстрация остальной части систем моторного привода опускается в данном документе. Между тем, зубчатая передача для изменения скорости может быть вставлена между мотором 6 и замедлителем 8 на фиг. 1 при необходимости.
[0015] Функциональный интегрированный модуль 9 управления ранжируется выше модуля 11 сервоуправления и осуществляет прямое управление операциями робота 1. Модуль 10 связи переносит необходимые данные в/из модуля 15 связи в устройстве 3 диагностики неисправностей, которое описывается ниже, например, через LAN. Между тем, модуль 13 получения данных о состоянии имеет функцию для того, чтобы регулярно собирать различные типы данных относительно рабочих состояний соответствующих осей сочленения робота 1. Собранные данные включают в себя данные, указывающие период сбора. Модуль 12 вычисления возмущающего крутящего момента имеет функцию для того, чтобы вычислять значение возмущающего крутящего момента на основе данных, полученных посредством модуля 13 получения данных о состоянии. Поскольку модуль 11 сервоуправления сконструирован с возможностью включать в себя модуль 12 вычисления возмущающего крутящего момента и модуль 13 получения данных о состоянии, значение возмущающего крутящего момента, полученное посредством вычисления модуля 12 вычисления возмущающего крутящего момента, выводится в устройство 3 диагностики неисправностей через модуль 10 связи. Согласно этой конфигурации, модуль 11 сервоуправления принимает форму так называемого программного сервомеханизма.
[0016] Устройство 3 диагностики неисправностей включает в себя модуль 15 связи, модуль 16 выбора возмущающего крутящего момента, базу 17 данных возмущающих крутящих моментов, модуль 18 диагностики неисправностей и базу 19 данных записей технического обслуживания. Здесь, устройство 3 диагностики неисправностей формируется из электронной схемы общего назначения, включающей в себя микрокомпьютер, микропроцессор и CPU, и периферийного устройства, такого как запоминающее устройство. Соответственно, устройство 3 диагностики неисправностей работает в качестве модуля 15 связи, модуля 16 выбора возмущающего крутящего момента и модуля 18 диагностики неисправностей посредством выполнения конкретных программ.
[0017] Модуль 15 связи имеет функцию для того, чтобы переносить необходимые данные в/из модуля 10 и 20 связи в вышеуказанном устройстве 2 управления робота и устройстве 4 управления производством, например, через LAN. Модуль 16 выбора возмущающего крутящего момента имеет функции для того, чтобы получать необходимую производственную информацию из устройства 4 управления производством и выбирать значение, которое должно сохраняться, из значений возмущающего крутящего момента, собранных в зависимости от рабочего состояния робота 1. Между тем, база 17 данных возмущающих крутящих моментов имеет функцию для того, чтобы последовательно сохранять значения возмущающего крутящего момента, выбранные посредством модуля 16 выбора возмущающего крутящего момента. Как следствие, база 17 данных возмущающих крутящих моментов накапливает предыдущие значения возмущающего крутящего момента.
[0018] База 19 данных записей технического обслуживания имеет функцию для того, чтобы сохранять записи технического обслуживания на соответствующих осях сочленения, когда задачи по техническому обслуживанию проводятся в роботе 1. Как следствие, база 19 данных записей технического обслуживания накапливает предыдущие данные записей технического обслуживания.
[0019] Модуль 18 диагностики неисправностей имеет функцию для того, чтобы активно выполнять диагностику неисправностей на основе значений возмущающего крутящего момента. Модуль 18 диагностики неисправностей оснащен функцией запоминающего устройства. Следовательно, модуль 18 диагностики неисправностей временно сохраняет данные, полученные посредством осуществления доступа к базе 17 данных возмущающих крутящих моментов и базе 19 данных записей технического обслуживания, соответственно, и выполняет диагностику неисправностей на основе этих данных. В частности, модуль 18 диагностики неисправностей получает позицию перемещения каждой оси движения и значение возмущающего крутящего момента, прикладываемого к каждой оси движения в каждой позиции перемещения каждый предварительно определенный период, и диагностирует то, что неисправность возникает, если полученное значение возмущающего крутящего момента превышает пороговое значение определения неисправностей. Кроме того, модуль 18 диагностики неисправностей включает в себя модуль 25 определения эффекта технического обслуживания, который определяет эффект задачи по техническому обслуживанию и сбрасывает пороговое значение определения неисправностей, когда проводится задача по техническому обслуживанию.
[0020] Модуль 25 определения эффекта технического обслуживания вычисляет изменение значения возмущающего крутящего момента до и после проведения задачи по техническому обслуживанию, когда задача по техническому обслуживанию проводится на оси движения, и сбрасывает пороговое значение определения неисправностей только тогда, когда изменение значения возмущающего крутящего момента, вычисленное таким способом, превышает предварительно определенное пороговое значение. Здесь, модуль 25 определения эффекта технического обслуживания вычисляет темп изменения значения возмущающего крутящего момента в качестве изменения значения возмущающего крутящего момента.
[0021] В частности, темп изменения может получаться посредством следующей формулы:
Темп изменения значения возмущающего крутящего момента=(среднее значение до проведения задачи по техническому обслуживанию - среднее значение после проведения задачи по техническому обслуживанию)/(среднее значение до проведения задачи по техническому обслуживанию).
[0022] Тем не менее, изменение значения возмущающего крутящего момента может извлекаться не только из темпа изменения, но также и из вычисления разности между средним значением до проведения задачи по техническому обслуживанию и средним значением после проведения задачи по техническому обслуживанию. Помимо этого, различное числовое значение может вычисляться, когда это числовое значение представляет изменение значения возмущающего крутящего момента до и после проведения задачи по техническому обслуживанию.
[0023] Между тем, в случае вычисления среднего значения из значений возмущающего крутящего момента после проведения задачи по техническому обслуживанию, вычисляется среднее значение значений возмущающего крутящего момента после даты, на которую предварительно определенный период истек с даты проведения задачи по техническому обслуживанию. Например, когда дата проведения задачи по техническому обслуживанию составляет день N, как показано на фиг. 3, среднее значение значений возмущающего крутящего момента вычисляется посредством использования данных после (N+2)-ого дня, а именно, данных после даты, на которую два дня истекли с даты проведения задачи по техническому обслуживанию. Это обусловлено следующей причиной. В частности, значения возмущающего крутящего момента значительно варьируются сразу после проведения технического обслуживания, как показано на фиг. 3, так что среднее значение может вычисляться более точно посредством вычисления среднего значения после того, как изменение прекращается. Здесь, случай использования данных после двух дней с даты проведения задачи по техническому обслуживанию поясняется на фиг. 3. Тем не менее, период, требуемый для стабилизации значений возмущающего крутящего момента после проведения задачи по техническому обслуживанию, варьируется в зависимости от контента задачи по техническому обслуживанию и/или осей движения, подвергнутых задаче по техническому обслуживанию. По этой причине, данный период после проведения задачи по техническому обслуживанию может задаваться для каждого отдельного случая.
[0024] Устройство 4 управления производством, например, представляет собой устройство для того, чтобы управлять производственной информацией, включающей в себя рабочее состояние технологической линии на заводе. Устройство 4 управления производством включает в себя модуль 20 связи и базу 21 данных производственной информации. Модуль 20 связи переносит необходимые данные в/из модуля 15 связи в устройстве 3 диагностики неисправностей, например, через LAN. База 21 данных производственной информации имеет функцию для того, чтобы сохранять множество собранной производственной информации. Как следствие, база 21 данных производственной информации накапливает множество предыдущей производственной информации. Здесь, производственная информация включает в себя информацию экстренной остановки в роботе 1 и его несущественного оборудования, а также информацию относительно записей технического обслуживания и т.п.
[0025] Здесь, в этом варианте осуществления, возмущающий крутящий момент (возмущающий крутящий момент нагрузки), прикладываемый к электромотору 6, который приводит в действие каждую ось сочленения робота 1, обнаруживается, и анормальность соответствующей системы моторного привода диагностируется в качестве неисправности робота на основе этого значения возмущающего крутящего момента. Процедуры для того, чтобы получать возмущающий крутящий момент, заключаются в следующем.
[0026] Как показано на блок-схеме на фиг. 2, темп ускорения получается посредством дифференцирования фактических скоростей Vr электромотора 6, извлекаемых из сигналов обратной связи по скорости из импульсного кодера 7, и затем ускоряющий крутящий момент Ta получается посредством умножения темпа ускорения на всю инерцию J, которая должна прикладываться к электромотору 6. Затем, полученный ускоряющий крутящий момент Ta вычитается из команды Tc управления крутящим моментом в электромотор 6, полученной посредством контурной обработки скорости посредством модуля 11 сервоуправления, и момент M дополнительно вычитается из него, чтобы получать возмущающий крутящий момент Tb. После этого, нерегулярные компоненты возмущений удаляются посредством проведения данной обработки фильтрации, и возмущающий крутящий момент TG в силу этого получается. Модуль 11 сервоуправления выполняет вышеописанную обработку каждого предварительно определенного периода дискретизации, за счет этого получая возмущающий крутящий момент TG.
[0027] Если точнее, модуль 11 сервоуправления включает в себя регистр, и регистр получает абсолютную позицию электромотора 6 посредством подсчета импульсов обратной связи по позиции из импульсного кодера 7 в каждый предварительно определенный период дискретизации. Соответственно, модуль 11 сервоуправления обнаруживает абсолютную позицию электромотора 6 из регистра и получает позицию угла поворота (позицию перемещения) оси сочленения, приводимой в действие посредством электромотора 6, из абсолютной позиции электромотора 6. Кроме того, модуль 11 сервоуправления получает возмущающий крутящий момент TG посредством выполнения обработки по фиг. 2, как описано выше.
[0028] Обработка выбора возмущающего крутящего момента
Далее описывается обработка выбора возмущающего крутящего момента посредством модуля 16 выбора возмущающего крутящего момента устройства 3 диагностики неисправностей согласно этому варианту осуществления со ссылкой на фиг. 4. Фиг. 4 является блок-схемой последовательности операций способа, показывающей процедуры обработки выбора возмущающего крутящего момента посредством модуля 16 выбора возмущающего крутящего момента.
[0029] Как показано на фиг. 4, на этапе S1, модуль 16 выбора возмущающего крутящего момента получает значения возмущающего крутящего момента, вычисленные посредством устройства 2 управления робота. Каждое значение возмущающего крутящего момента представляет значение в каждой позиции перемещения каждой оси движения. Кроме того, информация, указывающая период сбора данных для значений возмущающего крутящего момента, также получается одновременно.
[0030] Затем, на этапе S2, модуль 16 выбора возмущающего крутящего момента получает информацию экстренной остановки в производственном объекте из базы 21 данных производственной информации в устройстве 4 управления производством. На этапе S3, модуль 16 выбора возмущающего крутящего момента определяет то, возникает или нет экстренная остановка средства в период сбора для полученных значений возмущающего крутящего момента. Обработка переходит к этапу S4 в случае определения того, что возникает экстренная остановка. С другой стороны, обработка переходит к этапу S5 в случае определения того, что не возникает экстренная остановка.
[0031] На этапе S4, модуль 16 выбора возмущающего крутящего момента удаляет только значения возмущающего крутящего момента во время возникновения экстренной остановки из полученных значений возмущающего крутящего момента, и затем обработка переходит к этапу S5. На этапе S5, модуль 16 выбора возмущающего крутящего момента записывает полученные значения возмущающего крутящего момента в базу 17 данных возмущающих крутящих моментов и завершает обработку выбора возмущающего крутящего момента согласно этому варианту осуществления.
[0032] Посредством выбора значений возмущающего крутящего момента посредством вышеописанной обработки, база 17 данных возмущающих крутящих моментов сохраняет и накапливает только значения возмущающего крутящего момента, которые не включают в себя анормальные значения, обусловленные экстренной остановкой средства.
[0033] Обработка диагностики неисправностей
Далее описывается обработка диагностики неисправностей посредством модуля 18 диагностики неисправностей устройства 3 диагностики неисправностей согласно этому варианту осуществления со ссылкой на фиг. 5. Фиг. 5 является блок-схемой последовательности операций способа, показывающей процедуры обработки диагностики неисправностей посредством модуля 18 диагностики неисправностей.
[0034] Как показано на фиг. 5, на этапе S11, модуль 18 диагностики неисправностей получает недавние значения возмущающего крутящего момента, а также значения возмущающего крутящего момента в этом месяце в прошлом году в качестве даты, когда в целом диагностика осуществляется, из базы 17 данных возмущающих крутящих моментов. На этапе S12, на основе значений возмущающего крутящего момента в этом месяце в прошлом году в качестве даты, когда осуществляется диагностика, модуль 18 диагностики неисправностей вычисляет, по меньшей мере, одно (или более) из среднего значения, значения дисперсии и медианного значения и затем вычисляет и задает пороговое значение определения неисправностей на основе вычисленного значения. Например, любое из среднего значения, значения дисперсии и медианного значения может задаваться равным пороговому значению определения неисправностей, или два или более из этих значений могут задаваться равными пороговым значениям определения неисправностей.
[0035] На этапе S13, модуль 18 диагностики неисправностей вычисляет, по меньшей мере, одно (или более) из среднего значения, значения дисперсии и медианного значения из недавних значений возмущающего крутящего момента и определяет то, равно или меньше либо нет вычисленное значение порогового значения определения неисправностей, заданного на этапе S12. Затем если вычисленное значение из среднего значения, значения дисперсии и медианного значения из недавних значений возмущающего крутящего момента равно или меньше порогового значения определения неисправностей, то модуль 18 диагностики неисправностей определяет то, что неисправность не возникает, и сразу завершает обработку диагностики неисправностей согласно этому варианту осуществления. С другой стороны, если вычисленное значение из среднего значения, значения дисперсии и медианного значения из недавних значений возмущающего крутящего момента превышает пороговое значение определения неисправностей, то модуль 18 диагностики неисправностей определяет то, что имеется вероятность неисправности, и обработка переходит к этапу S14.
[0036] На этапе S14, модуль 18 диагностики неисправностей определяет то, проведено или нет техническое обслуживание в течение прошлых трех месяцев, на основе данных, накопленных в базе 19 данных записей технического обслуживания. После этого, если техническое обслуживание не проведено, модуль 18 диагностики неисправностей определяет то, что неисправность возникает, и обработка переходит к этапу S21. С другой стороны, обработка переходит к этапу S15 для определения эффекта задачи по техническому обслуживанию, когда техническое обслуживание проведено в течение прошлых трех месяцев.
[0037] На этапе S15, модуль 25 определения эффекта технического обслуживания вычисляет темп изменения значения возмущающего крутящего момента до и после проведения задачи по техническому обслуживанию для всех осей движения робота, который подвергнут задаче по техническому обслуживанию. Робот, который подвергнут задаче по техническому обслуживанию, включает в себя несколько осей движения, и некоторые оси движения подвергнуты задаче по техническому обслуживанию, тогда как другие оси движения не подвергнуты задаче по техническому обслуживанию. Это обусловлено такой причиной, что некоторые оси движения должны подвергаться задаче по техническому обслуживанию часто, тогда как другие оси движения не должны подвергаться задаче по техническому обслуживанию в течение длительного периода времени. Здесь, темп изменения значения возмущающего крутящего момента вычисляется для всех этих осей движения. Следует отметить, что разность значения возмущающего крутящего момента до и после проведения задачи по техническому обслуживанию может вычисляться вместо темпа изменения значения возмущающего крутящего момента.
[0038] На этапе S16, модуль 25 определения эффекта технического обслуживания определяет то, равен или меньше либо нет каждый темп изменения значения возмущающего крутящего момента, вычисленного на этапе S15, предварительно определенного порогового значения. Когда темп изменения равен или меньше предварительно определенного порогового значения, модуль 25 определения эффекта технического обслуживания определяет то, что отсутствует влияние задачи по техническому обслуживанию, и что неисправность возникает, и обработка переходит к этапу S21. С другой стороны, когда темп изменения значения возмущающего крутящего момента превышает предварительно определенное пороговое значение, модуль 25 определения эффекта технического обслуживания определяет то, что существует эффект задачи по техническому обслуживанию, и обработка переходит к этапу S17. Другими словами, для всех осей движения робота, который подвергнут задаче по техническому обслуживанию, этот этап определяет то, изменяется значительно или нет значение возмущающего крутящего момента посредством эффекта задачи по техническому обслуживанию.
[0039] На этапе S17, модуль 18 диагностики неисправностей вычисляет, по меньшей мере, одно (или более) из среднего значения, значения дисперсии и медианного значения из значений возмущающего крутящего момента после проведения задачи по техническому обслуживанию и вычисляет и сбрасывает пороговое значение определения неисправностей на основе значения. В это время, в случае вычисления любого из среднего значения, значения дисперсии и медианного значения из значений возмущающего крутящего момента после проведения задачи по техническому обслуживанию, такое значение вычисляется посредством использования значений возмущающего крутящего момента после даты, на которую предварительно определенный период истек с даты проведения задачи по техническому обслуживанию, поскольку значения возмущающего крутящего момента могут значительно варьироваться и в силу этого быть нестабильными сразу после проведения технического обслуживания, как описано посредством использования фиг. 3.
[0040] На этапе S18, модуль 18 диагностики неисправностей определяет то, существует или нет сезонное варьирование значений возмущающего крутящего момента какой-либо из осей сочленения. Обработка переходит к этапу S20, когда отсутствует сезонное варьирование, или переходит к этапу S19, когда существует сезонное варьирование. Здесь, определение в отношении того, существует или нет сезонное варьирование значений возмущающего крутящего момента, выполняется посредством использования, например, степени корреляции между флуктуациями во внешней температуре в каждое время года и значениями возмущающего крутящего момента. Такое определение может выполняться посредством проверки отдельно накопленных данных внешних температур с данными значений возмущающего крутящего момента.
[0041] На этапе S19, модуль 18 диагностики неисправностей сбрасывает пороговое значение определения неисправностей еще раз посредством умножения порогового значения определения неисправностей, которое сбрасывается на этапе S17, на константу (коэффициент), соответствующую сезонному варьированию.
[0042] На этапе S20, модуль 18 диагностики неисправностей определяет то, равно или меньше либо нет, по меньшей мере, одно (или более) из среднего значения, значения дисперсии и медианного значения из недавних значений возмущающего крутящего момента соответствующей оси сочленения либо порогового значения определения неисправностей, которое сбрасывается один раз, либо порогового значения определения неисправностей, которое сбрасывается два раза. Затем если вычисленное значение из среднего значения, значения дисперсии и медианного значения из недавних значений возмущающего крутящего момента равно или меньше какого-либо из этих пороговых значений определения неисправностей, то модуль 18 диагностики неисправностей определяет то, что неисправность не возникает, и завершает обработку диагностики неисправностей согласно этому варианту осуществления. С другой стороны, если вычисленное значение из среднего значения, значения дисперсии и медианного значения из недавних значений возмущающего крутящего момента превышает соответствующее пороговое значение определения неисправностей, то модуль 18 диагностики неисправностей определяет то, что неисправность возникает, и обработка переходит к этапу S21.
[0043] На этапе S21, модуль 18 диагностики неисправностей отображает аварийное предупреждение неисправности на соответствующей оси сочленения на экране отображения непроиллюстрированного монитора, который устанавливается в качестве сменного оборудования в устройство 3 диагностики неисправностей, и обработка диагностики неисправностей согласно этому варианту осуществления завершается.
[0044] Преимущества варианта осуществления
Далее описываются преимущества устройства 3 диагностики неисправностей согласно этому варианту осуществления. Во-первых, когда задача по техническому обслуживанию проводится на осях движения многоосного станка, значения возмущающего крутящего момента могут вызывать существенное изменение формы сигнала. В этом случае, поскольку пороговое значение определения неисправностей является фиксированным в предшествующем уровне техники, может возникать случай ошибочного определения неисправности, даже если оси движения являются нормальными даже после проведения задачи по техническому обслуживанию. Как показано на фиг. 6(a), например, пороговые значения L1 и L2 определения неисправностей задаются относительно опорного значения S1 возмущающего крутящего момента до проведения задачи по техническому обслуживанию, соответственно. В этом случае, если пороговые значения L1 и L2 определения неисправностей остаются фиксированными, даже когда проведение задачи по техническому обслуживанию вызывает существенное изменение значения возмущающего крутящего момента, аварийное предупреждение активируется как следствие ошибочного определения неисправности после проведения задачи по техническому обслуживанию.
[0045] С другой стороны, когда задача по техническому обслуживанию проводится, устройство 3 диагностики неисправностей согласно этому варианту осуществления вычисляет изменение значения возмущающего крутящего момента до и после проведения задачи по техническому обслуживанию и сбрасывает пороговые значения определения неисправностей, когда изменение значения возмущающего крутящего момента превышает предварительно определенное пороговое значение. Как показано на фиг. 6(b), например, в случае если пороговые значения L1 и L2 определения неисправностей задаются относительно опорного значения S1 возмущающего крутящего момента до проведения задачи по техническому обслуживанию, соответственно, пороговые значения L3 и L4 определения неисправностей сбрасываются относительно нового опорного значения S2, когда проводится задача по техническому обслуживанию. Это позволяет повышать точность диагностики неисправностей при предотвращении ошибочного определения, даже когда проводится задача по техническому обслуживанию.
[0046] Тем не менее, может возникать случай фактического ослабления пороговых значений определения неисправностей, если пороговые значения определения неисправностей сбрасываются, когда проводится задача по техническому обслуживанию, не имеющая эффект на возмущающий крутящий момент. Как следствие, возникает риск пропуска неисправности, поскольку аварийное предупреждение не активируется. Например, как показано на фиг. 7(a), в случае если пороговые значения L1 и L2 определения неисправностей задаются относительно опорного значения S1 возмущающего крутящего момента до проведения задачи по техническому обслуживанию, соответственно, новое опорное значение S2 и пороговые значения L3 и L4 определения неисправностей задаются после проведения задачи по техническому обслуживанию. Тем не менее, поскольку неисправность развивается медленно, значения возмущающего крутящего момента также повышаются постепенно. Следовательно, если пороговые значения определения неисправностей сбрасываются посредством использования значений возмущающего крутящего момента до и после проведения задачи по техническому обслуживанию, пороговое значение L1 определения неисправностей изменяется на пороговое значение L3 определения неисправностей, даже если задача по техническому обслуживанию не имеет эффекта на возмущающий крутящий момент, и пороговое значение ослабляется. Как следствие, если операция продолжается как есть, неисправность возникает без активации аварийного предупреждения до того, как возмущающий крутящий момент достигает порогового значения L3 определения неисправностей.
[0047] С другой стороны, когда задача по техническому обслуживанию проводится, устройство 3 диагностики неисправностей согласно этому варианту осуществления вычисляет изменение значения возмущающего крутящего момента до и после проведения задачи по техническому обслуживанию и сбрасывает пороговые значения определения неисправностей только тогда, когда изменение значения возмущающего крутящего момента превышает предварительно определенное пороговое значение. Как показано на фиг. 7(b), например, в случае если пороговые значения L1 и L2 определения неисправностей задаются относительно опорного значения S1 возмущающего крутящего момента до проведения задачи по техническому обслуживанию, соответственно, опорное значение S1 и пороговые значения L1 и L2 определения неисправностей не сбрасываются, когда проведенная задача по техническому обслуживанию не имеет эффекта на возмущающий крутящий момент. Как следствие, аварийное предупреждение активируется в момент, когда значение возмущающего крутящего момента достигает порогового значения L1 определения неисправностей, так что неисправность может предотвращаться заранее. Это позволяет исключать эффект задачи по техническому обслуживанию посредством сброса пороговых значений определения неисправностей только тогда, когда проведенная задача по техническому обслуживанию имеет эффект на возмущающий крутящий момент, и за счет этого повышать точность диагностики неисправностей.
[0048] Кроме того, соответственно, в устройство 3 диагностики неисправностей этого варианта осуществления, темп изменения значения возмущающего крутящего момента вычисляется как изменение значения крутящего момента расстояния, так что эффект проведенной задачи по техническому обслуживанию для возмущающего крутящего момента может точно обнаруживаться. Это позволяет исключать эффект задачи по техническому обслуживанию только тогда, когда проведенная задача по техническому обслуживанию имеет эффект на возмущающий крутящий момент, и за счет этого повышать точность диагностики неисправностей.
[0049] Кроме того, устройство 3 диагностики неисправностей согласно этому варианту осуществления вычисляет изменение значения возмущающего крутящего момента до и после проведения задачи по техническому обслуживанию для каждой оси движения, которая также не подвергнута задаче по техническому обслуживанию, и сбрасывает пороговые значения определения неисправностей только тогда, когда изменение значения возмущающего крутящего момента превышает предварительно определенное пороговое значение. Таким образом, относительно осей движения, также не подвергнутых задаче по техническому обслуживанию, можно исключать эффект технического обслуживания посредством сброса пороговых значений определения неисправностей, когда существует эффект задачи по техническому обслуживанию, и за счет этого повышать точность диагностики неисправностей.
[0050] Между тем, устройство 3 диагностики неисправностей согласно этому варианту осуществления вычисляет изменение значения возмущающего крутящего момента посредством использования значений возмущающего крутящего момента до проведения задачи по техническому обслуживанию и значений возмущающего крутящего момента после даты, на которую предварительно определенный период истек с даты проведения задачи по техническому обслуживанию. Это позволяет вычислять изменение значения возмущающего крутящего момента за исключением периода, в который возмущающий крутящий момент значительно варьируется сразу после задачи по техническому обслуживанию, и за счет этого повышать точность диагностики неисправностей.
[0051] Кроме того, устройство 3 диагностики неисправностей согласно этому варианту осуществления сбрасывает пороговое значение определения неисправностей посредством использования, по меньшей мере, одного из среднего значения, значения дисперсии и медианного значения из значений возмущающего крутящего момента после проведения задачи по техническому обслуживанию. Это позволяет сбрасывать пороговое значение определения неисправностей, отражающее эффект задачи по техническому обслуживанию, и за счет этого повышать точность диагностики неисправностей при предотвращении ошибочного определения.
[0052] Хотя выше описан вариант осуществления настоящего изобретения, не следует понимать, что описания и чертежи, составляющие часть этого раскрытия сущности, имеют намерение ограничивать это изобретение. Различные альтернативные варианты осуществления, примеры и технологии применения должны становиться очевидными для специалистов в данной области техники из этого раскрытия сущности.
Список номеров ссылок
[0053] 1 - робот
2 - устройство управления робота
3 - устройство диагностики неисправностей
4 - устройство управления производством
5 - манипулятор робота
6 - сервомотор (электромотор)
7 - импульсный кодер
8 - замедлитель
9 - функциональный интегрированный модуль управления
10, 15, 20 - модуль связи
11 - модуль сервоуправления
12 - модуль вычисления возмущающего крутящего момента
13 - модуль получения данных о состоянии
14 - модуль сервоусилителя
16 - модуль выбора возмущающего крутящего момента
17 - база данных возмущающих крутящих моментов
18 - модуль диагностики неисправностей
19 - база данных записей технического обслуживания
21 - база данных производственной информации
25 - модуль определения эффекта технического обслуживания
100 - система диагностики неисправностей
Реферат
Изобретение относится к устройству диагностики неисправностей механического устройства, содержащего электромотор в качестве источника для приведения в действие оси движения. Устройство диагностики неисправностей выполнено с возможностью получения позиции перемещения оси движения и значения возмущающего крутящего момента, прикладываемого к оси движения каждый предварительно определенный период, и диагностики неисправности при значении возмущающего крутящего момента, превышающем пороговое значение определения неисправностей. Посредством устройства диагностики неисправностей вычисляют изменение значения возмущающего крутящего момента до и после проведения задачи по техническому обслуживанию, когда задача по техническому обслуживанию проводится на оси движения, и сбрасывает пороговое значение определения неисправностей только тогда, когда изменение значения возмущающего крутящего момента превышает предварительно определенное пороговое значение. Изобретение направлено на повышение точности диагностики неисправностей. 2 н. и 4 з.п. ф-лы, 7 ил.
Комментарии