Система управления для зацепляющего механизма с зацеплением зубчатого типа - RU2633045C2
Код документа: RU2633045C2
Чертежи




Описание
Изобретение относится к системе управления для зацепляющего механизма с зацеплением зубчатого типа, которая выполнена с возможностью передачи крутящего момента от входного элемента на выходной элемент посредством зацепления собачек между собой, и, в частности, к системе управления, которая управляет зацеплением и высвобождением собачек.
Публикация заявки на патент Японии № 2013-92211 (JP 2013-92211 А) раскрывает зацепляющий механизм с зацеплением зубчатого типа, в котором собачки формируются в двух элементах, обращенных друг к другу. Этот зацепляющий механизм с зацеплением зубчатого типа содержит гидравлический цилиндр двойного действия, который дает возможность рабочей силе действовать на один из этих двух элементов. Гидравлический цилиндр имеет такую конфигурацию, в которой соответствующие собачки вводятся в зубчатое зацепление между собой, когда давление масла подается в одну из гидравлических камер гидравлического цилиндра, и ввод в зацепление соответствующих собачек прекращается, когда давление масла подается в другую гидравлическую камеру. Помимо этого, часть масла, которое подается в гидравлический цилиндр, извлекается из вершин собачек на одной стороне, так что подавляется толчок в случае, если вершины собачек находятся в контакте друг с другом.
В зацепляющем механизме с зацеплением зубчатого типа, который раскрыт в JP 2013-92211 А, поверхности зубьев, в которых собачки находятся в контакте друг с другом, подвергаются силе трения, когда крутящий момент действует на собачки. Эта сила трения действует в направлении, которое является противоположным направлению, в котором собачки отделены друг от друга. Соответственно, затруднительно расцеплять зацепляющий механизм с зацеплением зубчатого типа. Соответственно, рабочее усилие обычно действует для того, чтобы прекращать ввод в зацепление соответствующих собачек после того, как уменьшается крутящий момент, действующий на собачки. Когда зацепляющий механизм с зацеплением зубчатого типа расцеплен таким образом, управление крутящим моментом, который действует на собачки, и управление для формирования рабочего усилия координируются между собой. Соответственно, управление для расцепления зацепляющего механизма с зацеплением зубчатого типа становится сложным, и в результате может возникать задержка при расцеплении.
Изобретение предоставляет систему управления для зацепляющего механизма с зацеплением зубчатого типа, которая допускает упрощение управления для расцепления зацепляющего механизма с зацеплением зубчатого типа.
Согласно объекту настоящего изобретения создана система управления для зацепляющего механизма с зацеплением зубчатого типа, при этом зацепляющий механизм с зацеплением зубчатого типа включает в себя первый элемент, второй элемент, камеру для текучей среды и переключающий клапан, причем первый элемент включает в себя множество первых собачек, выступающих в осевом направлении, при этом первые собачки размещены через постоянные интервалы вдоль окружности первого элемента, второй элемент включает в себя множество вторых собачек, выступающих в осевом направлении, причем вторые собачки размещены через постоянные интервалы вдоль окружности второго элемента, при этом вторые собачки выполнены с возможностью введения между первыми собачками, при этом камера для текучей среды выполнена с возможностью обеспечения перемещения второго элемента к стороне первого элемента посредством рабочего усилия, обусловленного подачей текучей среды, так что первые собачки и вторые собачки входят в зубчатое зацепление друг с другом, причем переключающий клапан выполнен с возможностью переключения между сообщающимся состоянием, в котором текучая среда подается в камеру для текучей среды, и состоянием отсечки, в котором подача текучей среды в камеру для текучей среды прекращена и камера для текучей среды заполнена текучей средой, при этом поверхности зубьев первых собачек и поверхности зубьев вторых собачек, передающих крутящий момент в контакте друг с другом, представляют собой наклонные поверхности, так что высвобождающее усилие в направлении, в котором первый элемент и второй элемент отделены друг от друга в осевом направлении, формируется в ответ на крутящий момент; причем система управления содержит электронный блок управления, выполненный с возможностью управления подачей и прекращением подачи текучей среды в камеру для текучей среды посредством переключающего клапана, при этом электронный блок управления выполнен с возможностью обеспечения заполнения камеры для текучей среды текучей средой посредством перевода переключающего клапана в состояние отсечки после того, как соответствующие собачки введены в зубчатое зацепление друг с другом посредством второго элемента, достигающего заданного положения, которое задано заранее в зависимости от давления текучей среды камеры для текучей среды, так что второй элемент прижимается в направлении, в котором второй элемент отделяется от первого элемента, посредством высвобождающего усилия, в зависимости от крутящего момента, передаваемого между поверхностью первого зуба и поверхностью второго зуба, при этом давление текучей среды камеры для текучей среды повышается, и состояние зацепления между первым элементом и вторым элементом поддерживается посредством повышенного давления текучей среды.
Предпочтительно, система дополнительно содержит насос, нагнетающий текучую среду, и проток, обеспечивающий сообщение камеры для текучей среды и насоса между собой, при этом электронный блок управления выполнен с возможностью управления насосом после того, как проток отсечен посредством переключающего клапана, так что давление на выходе насоса уменьшено.
Предпочтительно, система дополнительно содержит датчик, определяющий положение второго элемента в осевом направлении.
Предпочтительно, текучая среда представляет собой несжимаемую текучую среду.
Предпочтительно, первый элемент и второй элемент выполнены с возможностью вращения относительно друг друга, когда первые собачки и вторые собачки не входят в зубчатое зацепление друг с другом, причем первый элемент и второй элемент выполнены с возможностью вращения как одно целое друг с другом, когда первые собачки и вторые собачки введены в зубчатое зацепление между собой.
Предпочтительно, один из первого элемента и второго элемента соединен с фиксированной частью, так что другой из первого элемента и второго элемента прекращает вращение, когда первые собачки и вторые собачки введены в зубчатое зацепление друг с другом.
Как видно, система управления для зацепляющего механизма с зацеплением зубчатого типа согласно аспекту изобретения включает в себя зацепляющий механизм с зацеплением зубчатого типа и электронный блок управления. Зацепляющий механизм с зацеплением зубчатого типа включает в себя первый элемент, второй элемент, камеру для текучей среды и переключающий клапан. Первый элемент включает в себя множество первых собачек, выступающих в осевом направлении. Первые собачки размещены через постоянные интервалы в направлении вдоль окружности первого элемента. Второй элемент включает в себя множество вторых собачек, выступающих в осевом направлении. Вторые собачки размещены через постоянные интервалы в направлении вдоль окружности второго элемента. Вторые собачки выполнены с возможностью вставляться между первыми собачками. Камера для текучей среды выполнена с возможностью обеспечения перемещения второго элемента к стороне первого элемента посредством рабочего усилия, обусловленного подачей текучей среды, так что первые собачки и вторые собачки вводятся в зубчатое зацепление между собой. Переключающий клапан выполнен с возможностью переключаться между сообщающимся состоянием, в котором текучая среда подается в камеру для текучей среды, и состоянием отсечки, в котором подача текучей среды в камеру для текучей среды прекращается и камера для текучей среды заполнена текучей средой. Поверхность зубьев первых собачек и поверхность зубьев вторых собачек, передающих крутящий момент в контакте друг с другом, представляют собой наклонные поверхности, так что высвобождающее усилие в направлении, в котором первый элемент и второй элемент отделены друг от друга в осевом направлении, формируется в ответ на крутящий момент. Электронный блок управления выполнен с возможностью управлять подачей и прекращением подачи текучей среды в камеру для текучей среды посредством переключающего клапана. Электронный блок управления выполнен с возможностью обеспечения заполнения камеры для текучей среды текучей средой посредством перевода переключающего клапана в состояние отсечки после того, как соответствующие собачки вводятся в зубчатое зацепление между собой посредством второго элемента, достигающего предварительно заданного положения, заданного с опережением в ответ на давление текучей среды камеры для текучей среды, так что второй элемент прижимается в направлении, в котором второй элемент отделен от первого элемента, посредством высвобождающего усилия в зависимости от крутящего момента, передаваемого между поверхностью зуба первого зуба и поверхностью зуба второго зуба, при этом повышается давление текучей среды камеры для текучей среды, и состояние зацепления между первым элементом и вторым элементом поддерживается посредством давления текучей среды, которое повышается.
Система управления согласно аспекту, описанному выше, дополнительно может включать в себя насос, нагнетающий текучую среду, и проток, дающий возможность камере для текучей среды и насосу сообщаться между собой. Электронный блок управления может быть выполнен с возможностью управлять насосом после того, как проток отсекается посредством переключающего клапана, так что уменьшается давление на выходе насоса.
Система управления согласно аспекту, описанному выше, дополнительно может включать в себя датчик для определения положения второго элемента в осевом направлении.
В системе управления согласно аспекту, описанному выше, текучая среда может представлять собой несжимаемую текучую среду.
В системе управления согласно аспекту, описанному выше, первый элемент и второй элемент могут быть выполнены с возможностью вращаться относительно друг друга, когда первые собачки и вторые собачки не введены в зубчатое зацепление между собой. Первый элемент и второй элемент могут быть выполнены с возможностью вращаться как одно целое друг с другом, когда первые собачки и вторые собачки введены в зубчатое зацепление между собой.
В системе управления согласно аспекту, описанному выше, один из первого элемента и второго элемента может соединяться с фиксированной частью, так что другой из первого элемента и второго элемента прекращает вращение, когда первые собачки и вторые собачки введены в зубчатое зацепление между собой.
В системе управления согласно аспекту, описанному выше, поверхности зубьев первых собачек и вторых собачек, передающих крутящий момент в контакте друг с другом, представляют собой наклонные поверхности, которые обращены друг к другу, и высвобождающее усилие в направлении, в котором первый элемент и второй элемент отделены друг от друга в осевом направлении, формируется в ответ на крутящий момент в направлении, в котором наклонные поверхности приводятся в контакт друг с другом. Соответственно, зацепляющий механизм с зацеплением зубчатого типа может расцепляться в состоянии, в котором крутящий момент передается, так что наклонные поверхности соответствующих собачек находятся в контакте друг с другом, и уменьшается рабочее усилие, посредством которого прижимается второй элемент. В этом случае, управление крутящим моментом, который вводится в зацепляющий механизм с зацеплением зубчатого типа, и управление для уменьшения рабочего усилия не обязательно должны координироваться между собой, и в результате этого может упрощаться управление для расцепления зацепляющего механизма с зацеплением зубчатого типа.
В случае, если первый элемент и второй элемент зацепляются между собой, камера для текучей среды заполнена текучей средой после того, как соответствующие собачки введены в зубчатое зацепление между собой. Когда крутящий момент передается в этом состоянии, второй элемент прижимается в направлении, в котором второй элемент отделен от первого элемента, сжимающее усилие действует на текучую среду в камере для текучей среды, и повышается давление текучей среды. Другими словами, формируется усилие реакции против высвобождающего усилия, и поддерживается состояние, в котором зацепляющий механизм с зацеплением зубчатого типа зацепляется. Соответственно, давление текучей среды, которая подается в камеру для текучей среды, может уменьшаться, так что зацепляющий механизм с зацеплением зубчатого типа находится в состоянии зацепления. Соответственно, давление текучей среды, которая выводится из источника подачи текучей среды, такого как насос, может быть низким, и в результате этого потери мощности могут уменьшаться. Помимо этого, поскольку давление текучей среды камеры для текучей среды увеличивается в соответствии с крутящим моментом, как описано выше, давление, которое требуется для поддержания состояния зацепления, может достигаться, даже когда площадь приема давления, которая подвергается действию давления текучей среды, является небольшой. Соответственно, площадь приема давления камеры для текучей среды может уменьшаться, и в результате этого уменьшается объем камеры для текучей среды. Соответственно, может сокращаться продолжительность, требуемая на то, чтобы завершать ввод в зацепление соответствующих собачек с начала подачи текучей среды в камеру для текучей среды. Помимо этого, может уменьшаться количество текучей среды, которая подается для ввода соответствующих собачек в зубчатое зацепление между собой.
В случае, если камера для текучей среды выполнена с возможностью заполнения текучей средой с протоком, сообщающимся с камерой для текучей среды и отсеченным насосом, давление на выходе насоса уменьшается после того, как соответствующие собачки введены в зубчатое зацепление между собой, и проток отсекается. Соответственно, потери мощности от насоса могут уменьшаться, когда зацепляющий механизм с зацеплением зубчатого типа зацепляется.
Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является блок-схемой последовательности операций способа для показа примера управления для зацепления зацепляющего механизма с зацеплением зубчатого типа;
Фиг. 2 является временной диаграммой для показа изменений положения поршня, давления масла гидравлической камеры и давления подачи масла в ходе зацепления зацепляющего механизма с зацеплением зубчатого типа;
Фиг. 3 является блок-схемой последовательности операций способа для показа примера управления для расцепления зацепляющего механизма с зацеплением зубчатого типа;
Фиг. 4 является временной диаграммой для показа изменений положения поршня, давления масла гидравлической камеры и давления подачи масла в ходе расцепления зацепляющего механизма с зацеплением зубчатого типа;
Фиг. 5 является принципиальной схемой для показа примера конфигурации зацепляющего механизма с зацеплением зубчатого типа согласно изобретению;
Фиг. 6 является чертежом для показа направления нагрузки, которая действует на боковые поверхности вторых собачек, когда зацепляющий механизм с зацеплением зубчатого типа передает крутящий момент; и
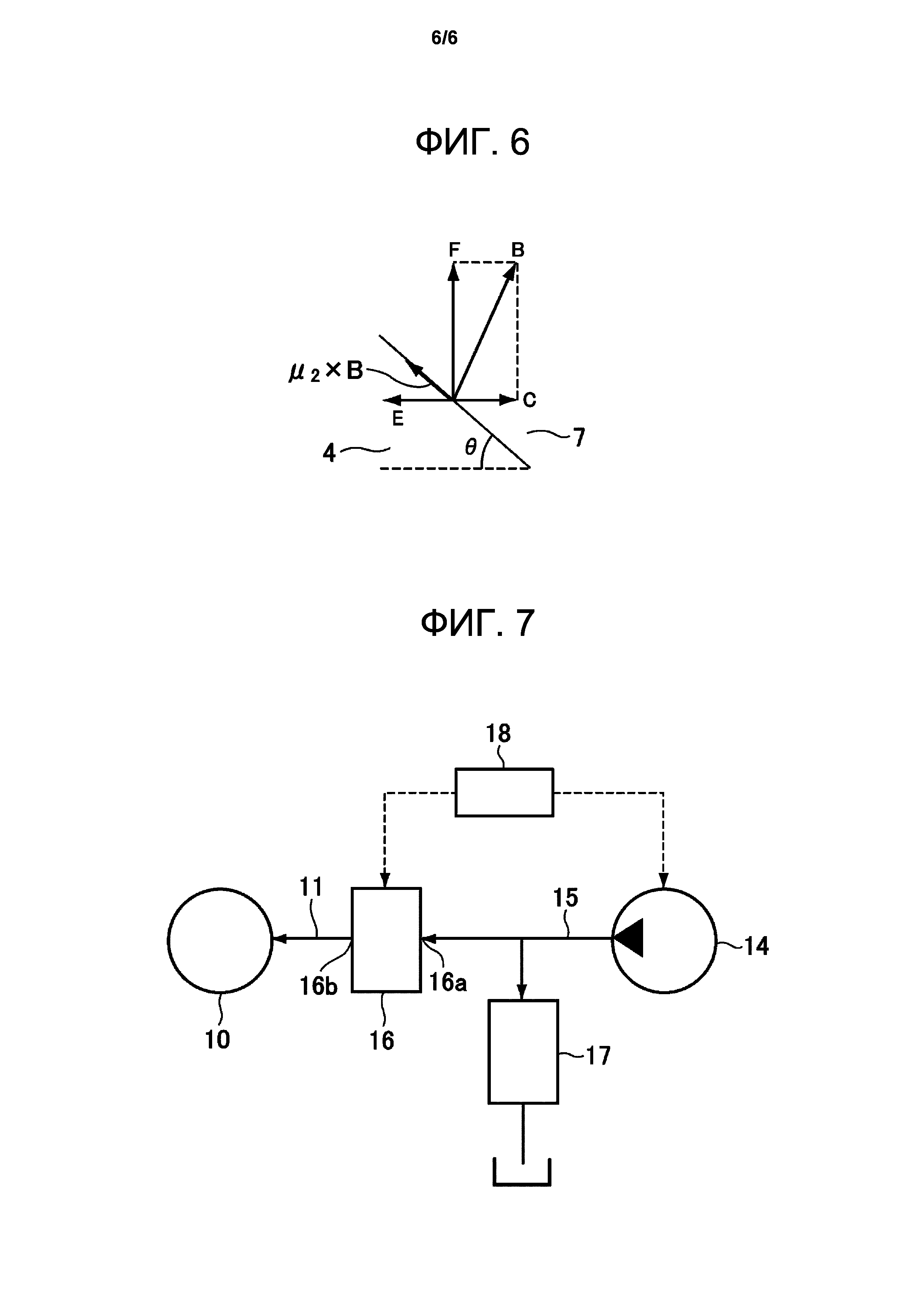
Фиг. 7 является гидравлической принципиальной схемой для показа примера конфигурации для подачи масла в гидравлическую камеру.
Зацепляющий механизм с зацеплением зубчатого типа согласно изобретению содержит первый элемент, в котором сформированы первые собачки, и второй элемент, в котором сформированы вторые собачки. Зацепляющий механизм с зацеплением зубчатого типа согласно изобретению выполнен с возможностью обеспечения первым собачкам и вторым собачкам введения в зубчатое зацепление между собой, когда второй элемент прижимается и перемещается к стороне первого элемента. Пример этого зацепляющего механизма с зацеплением зубчатого типа проиллюстрирован на фиг. 5. Зацепляющий механизм 1 с зацеплением зубчатого типа, который проиллюстрирован на фиг. 5, монтируется в транспортном средстве. Зацепляющий механизм 1 с зацеплением зубчатого типа содержит входной элемент 2 и выходной элемент 3. Крутящий момент передается во входной элемент 2 из источника мощности, такого как двигатель (не проиллюстрирован). Выходной элемент 3 соединяется с ведущим колесом (не проиллюстрировано) и т.п. Входной элемент 2 и выходной элемент 3 удерживаются в корпусе (не проиллюстрирован) с возможностью вращения посредством подшипника и т.п. Входной элемент 2 и выходной элемент 3 размещены таким образом, что они обращены друг к другу с предварительно определенным интервалом в осевом направлении. В нижеприведенном описании входной элемент 2 вводит крутящий момент T в направлении, которое показано стрелкой на чертеже.
Входной элемент 2 соответствует "первому элементу" согласно варианту осуществления изобретения. Входной элемент 2 имеет множество первых собачек 4, которые выступают к стороне выходного элемента 3 в осевом направлении. Множество первых собачек 4 формируется с предварительно определенными интервалами в направлении вращения входного элемента 2. Боковые поверхности 4a первых собачек 4, которые находится в направлении вращения входного элемента 2, располагаются под углом к поверхностям 4b вершин первых собачек 4, и угол наклона является тупым углом. Зацепляющий механизм 1 с зацеплением зубчатого типа выполнен с возможностью формировать высвобождающее усилие посредством ввода крутящего момента, как описано ниже. Соответственно, вышеописанный угол наклона может определяться на основе абсолютной величины крутящего момента, который вводится, когда зацепляющий механизм 1 с зацеплением зубчатого типа расцеплен.
Углубленная часть 5, которая является открытой к стороне входного элемента 2, формируется в выходном элементе 3. Поршень 6 размещен в углубленной части 5. Поршень 6 вращается как одно целое с выходным элементом 3 и перемещается в осевом направлении выходного элемента 3. В частности, внутренняя поверхность углубленной части 5 и внешняя поверхность поршня 6 находятся в шлицевом зацеплении между собой. Поршень 6 соответствует "второму элементу" согласно варианту осуществления изобретения. Поршень 6 имеет множество вторых собачек 7, которые вставляются между первыми собачками 4. Множество вторых собачек 7 формируется с предварительно определенными интервалами в направлении вращения выходного элемента 3. Боковые поверхности 7a вторых собачек 7, которые обращены к боковым поверхностям 4a первых собачек 4, когда первые собачки 4 и вторые собачки 7 вводятся в зубчатое зацепление между собой, формируются под углом. В частности, угол наклона боковых поверхностей 7a вторых собачек 7 относительно поверхностей 7b вершин вторых собачек 7 является тупым углом. Соответственно, первые собачки 4 и вторые собачки 7 находятся в поверхностном контакте друг с другом при вводе в зубчатое зацепление между собой. Другими словами, угол наклона боковых поверхностей 4a первых собачек 4 относительно поверхностей 4b вершин первых собачек 4 равен углу наклона боковых поверхностей 7a вторых собачек 7 относительно поверхностей 7b вершин вторых собачек 7. Помимо этого, в примере, который проиллюстрирован на фиг. 5, боковые поверхности 4c, 7c на других сторонах соответствующих собачек 4, 7 формируются под углом, как и в случае с боковыми поверхностями 4a, 7a. Это должно обеспечения расцепления зацепляющего механизма 1 с зацеплением зубчатого типа в ответ на крутящий момент даже в случае, если направление крутящего момента, который вводится в зацепляющий механизм 1 с зацеплением зубчатого типа, изменено на противоположное. Боковые поверхности 4a первых собачек 4 соответствуют "первым поверхностям зубьев" в случае, когда осуществляется изобретение. Боковые поверхности 7a вторых собачек 7, которые обращены к боковым поверхностям 4a, соответствуют "вторым поверхностям зубьев" в случае, когда осуществляется изобретение.
Возвратная пружина 8 также расположена в зацепляющем механизме 1 с зацеплением зубчатого типа. Возвратная пружина 8 прижимает поршень 6 к стороне нижней поверхности углубленной части 5. Возвратная пружина 8 представляет собой пружину сжатия, которая располагается между шайбой 9, которая крепится к кожуху (не проиллюстрирован), и поршнем 6. Как указано посредством стрелки на фиг. 5, возвратная пружина 8 имеет такую конфигурацию, в которой усилие S сжатия пружины всегда действует в направлении, в котором поршень 6 отделен от входного элемента 2.
Масло в качестве несжимаемой текучей среды подается в пространство 10 (в дальнейшем в этом документе, называется "гидравлической камерой"), которое окружено посредством задней поверхности поршня 6 и внутренней поверхности углубленной части 5. В примере, который проиллюстрирован на фиг. 5, первый масляный канал 11 формируется вдоль центра оси вращения выходного элемента 3, и гидравлическая камера 10 и источник гидравлического давления (описан ниже) выполнены с возможностью сообщаться между собой через первый масляный канал 11. Соответственно, когда масло подается в гидравлическую камеру 10, рабочее усилие A действует на поршень 6 на основе давления масла гидравлической камеры 10. Когда рабочее усилие A превышает усилие S сжатия пружины для возвратной пружины 8, поршень 6 перемещается в сторону входного элемента 2. Датчик 12 хода располагается таким образом, что определяется положение поршня 6. В примере, который проиллюстрирован на фиг. 5, предусмотрены первый датчик 12a хода и второй датчик 12b хода. Первый датчик 12a хода определяет перемещение поршня 6 из нижней поверхности углубленной части 5 в первое предварительно заданное положение (описано ниже). Второй датчик 12b хода определяет отделение поршня 6 от входного элемента 2 во второе предварительно заданное положение (описано ниже). Герметизирующий элемент 13 располагается между внешней поверхностью поршня 6 и внутренней поверхностью углубленной части 5 таким образом, что подавляется утечка масла из гидравлической камеры 10.
Ниже описывается нагрузка, которая действует на поршень 6, когда зацепляющий механизм 1 с зацеплением зубчатого типа, который проиллюстрирован на фиг. 5, передает крутящий момент. Направление нагрузки, которая действует на боковые поверхности 7a вторых собачек 7, когда зацепляющий механизм 1 с зацеплением зубчатого типа передает крутящий момент, проиллюстрировано на фиг. 6. В случае, если зацепляющий механизм 1 с зацеплением зубчатого типа передает крутящий момент, нагрузка F в направлении вращения выходного элемента 3 действует на вторые собачки 7. Нагрузка F может получаться из расстояния между центральной осью вращения и контактной частью и крутящего момента T, вводимого в зацепляющий механизм 1 с зацеплением зубчатого типа. Как описано выше, боковые поверхности 7a вторых собачек 7 формируются под углом, и в силу этого нагрузка B (в дальнейшем в этом документе, называется "вертикальной нагрузкой") в вертикальном направлении действует на боковые поверхности 7a. Эта вертикальная нагрузка B может получаться на основе нагрузки F и угла наклона. Аналогично, нагрузка C (в дальнейшем в этом документе, называется "высвобождающим усилием") в осевом направлении выходного элемента 3 действует на боковые поверхности 7a. Направление высвобождающего усилия C представляет собой направление, в котором поршень 6 отделен от входного элемента 2. Вертикальная нагрузка B и высвобождающее усилие C могут получаться на основе следующих уравнений. В следующих уравнениях "θ" представляет угол наклона боковых поверхностей 7a вторых собачек 7 относительно оси вращения выходного элемента 3.
B=F/cosθ... (1)
C=B×sinθ=F/tanθ... (2)
Крутящий момент вводится в поршень 6 через вторые собачки 7, и в силу этого сила трения D аналогично действует на контактную часть поршня 6 и углубленной части 5. Когда крутящий момент действует на вторые собачки 7, контактные поверхности первых собачек 4 и вторых собачек 7 подвергаются силе трения, и составляющее усилие E этой силы трения действует против высвобождающего усилия, описанного выше. Сила трения D и составляющее усилие E силы трения, которым подвергнуты контактные поверхности, могут получаться на основе следующих уравнений. В следующих уравнениях "μ1" представляет коэффициент трения контактной части поршня 6 и углубленной части 5, и "μ2" представляет коэффициент трения контактных поверхностей первых собачек 4 и вторых собачек 7.
D=μ1×F... (3)
E=μ2×B×cosθ... (4)
Как описано выше, усилие S сжатия пружины для возвратной пружины 8 действует на поршень 6. Помимо этого, рабочее усилие A в зависимости от давления масла гидравлической камеры 10 действует на поршень 6. Рабочее усилие A может получаться посредством произведения площади приема давления поршня 6 и давления масла гидравлической камеры 10. Соответственно, поршень 6 перемещается в сторону углубленной части 5, когда результирующая сила из высвобождающего усилия C и усилия S сжатия пружины превышает результирующую силу из силы трения D и составляющего усилия E силы трения, действию которых подвергаются контактные поверхности, и рабочего усилия A. Другими словами, зацепляющий механизм 1 с зацеплением зубчатого типа расцеплен в случае, если удовлетворяется следующее выражение.
C+S-(D+E+A)>0... (5)
Как показано в вышеописанном уравнении (2), высвобождающее усилие C изменяется пропорционально нагрузке F, и нагрузка F изменяется в ответ на крутящий момент T, который вводится в зацепляющий механизм 1 с зацеплением зубчатого типа. Соответственно, высвобождающее усилие C увеличивается, когда увеличивается крутящий момент T, который вводится в зацепляющий механизм 1 с зацеплением зубчатого типа. Соответственно, зацепляющий механизм 1 с зацеплением зубчатого типа может расцепляться, когда увеличивается крутящий момент T, который вводится в зацепляющий механизм 1 с зацеплением зубчатого типа, и уменьшается давление масла гидравлической камеры 10.
Крутящий момент T, который вводится в зацепляющий механизм 1 с зацеплением зубчатого типа, может изменяться на основе управления выходным крутящим моментом источника мощности (не проиллюстрирован), передаточным крутящим моментом другого устройства, которое располагается в тракте передачи крутящего момента между источником мощности и зацепляющим механизмом 1 с зацеплением зубчатого типа, и т.п. Давление масла гидравлической камеры 10 может изменяться, когда управляется давление на выходе источника гидравлического давления (описан ниже) и гидравлического регулирующего клапана. Управление крутящим моментом T, который вводится в зацепляющий механизм 1 с зацеплением зубчатого типа, и управление давлением масла гидравлической камеры 10 не обязательно должны координироваться между собой и могут выполняться по отдельности. Зацепляющий механизм 1 с зацеплением зубчатого типа расцеплен, когда вышеописанное выражение (5) удовлетворяется, в то время как крутящий момент T, который вводится в зацепляющий механизм 1 с зацеплением зубчатого типа, изменяется, и давление масла гидравлической камеры 10 изменяется. Соответственно, может упрощаться управление для расцепления зацепляющего механизма 1 с зацеплением зубчатого типа.
В зацепляющем механизме 1 с зацеплением зубчатого типа, который сконфигурирован так, как описано выше, высвобождающее усилие C действует, даже когда крутящий момент передается. Соответственно, давление масла гидравлической камеры 10 должно поддерживаться в высоком уровне для поддержания состояния зацепления. Когда относительно высокое давление масла подается в гидравлическую камеру 10, потери мощности источника гидравлического давления могут увеличиваться, либо может увеличиваться размер устройства. Соответственно, система управления для зацепляющего механизма с зацеплением зубчатого типа согласно изобретению выполнена с возможностью поддерживать состояние зацепления с относительно низким давлением масла, поданным в гидравлическую камеру 10, и давлением масла, повышенным посредством передачи крутящего момента зацепляющего механизма 1 с зацеплением зубчатого типа.
Ниже описывается гидравлическая схема для подачи масла в гидравлическую камеру 10. Гидравлическая схема схематично проиллюстрирована на фиг. 7. Гидравлическая схема, которая проиллюстрирована на фиг. 7, содержит электрический масляный насос 14 (в дальнейшем в этом документе, называется "EOP"), который формирует давление масла в ответ на подачу электроэнергии. Масло, которое выводится из EOP 14, протекает через второй масляный канал 15 и подается в двухпозиционный клапан 16. Двухпозиционный клапан 16 представляет собой нормально закрытый электромагнитный клапан, который выполнен с возможностью открываться при подаче питания. Двухпозиционный клапан 16 выполнен с возможностью допускать герметизацию входного порта 16a или выходного порта 16b в состоянии, в котором двухпозиционный клапан 16 закрыт. Примеры двухпозиционного клапана 16 включают в себя тарельчатый клапан, который выполнен с возможностью закрывать порт 16a (16b), при этом корпус клапана примыкает к входному порту 16a или выходному порту 16b. Гидравлическая камера 10 сообщается с выходным портом 16b двухпозиционного клапана 16. Соответственно, масло подается из EOP 14 в гидравлическую камеру 10, когда двухпозиционный клапан 16 является открытым. Когда двухпозиционный клапан 16 закрыт, притом что масло подается в гидравлическую камеру 10, гидравлическая камера 10 заполнена маслом. Двухпозиционный клапан 16 соответствует "переключающему клапану" согласно варианту осуществления изобретения.
Помимо этого, клапан 17 для снижения давления располагается таким образом, что он открывается и уменьшает давление масла второго масляного канала 15 в случае, если давление масла второго масляного канала 15 составляет, по меньшей мере, предварительно определенное значение. Клапан 17 для снижения давления открывается и выпускает масло из второго масляного канала 15 в случае, если давление масла второго масляного канала 15 повышается, по меньшей мере, до требуемого давления масла. Клапан 17 для снижения давления может быть сконфигурирован как любой из различных регулирующих клапанов, которые известны в предшествующем уровне техники. В случае, если EOP 14 представляет собой источник гидравлического давления, как проиллюстрировано на фиг. 7, давление масла, которое подается в гидравлическую камеру 10, управляется посредством управления значением тока, с помощью которого подается питание в EOP 14. Источник гидравлического давления может представлять собой механический масляный насос, который приводится в действие, когда крутящий момент передается из другого источника мощности, такого как двигатель. В этом случае, гидравлический регулирующий клапан может располагаться между источником гидравлического давления и двухпозиционным клапаном 16, и давление масла, поданного в гидравлическую камеру 10, может управляться посредством гидравлического регулирующего клапана.
Электронный блок 18 управления (в дальнейшем в этом документе, называется "ECU") располагается таким образом, что управляются EOP 14 и двухпозиционный клапан 16, описанные выше. ECU 18 выполнен с возможностью выступать в качестве контроллера, когда выполняется следующая блок-схема последовательности операций способа. ECU 18 выполнен с возможностью иметь микрокомпьютер в качестве своего основного компонента, как и в случае с ECU, известными в предшествующем уровне техники. ECU 18 выполнен с возможностью принимать входные сигналы из соответствующих датчиков 12a, 12b хода и другого датчика (не проиллюстрирован) и выводить сигналы в EOP 14 и двухпозиционный клапан 16 или другое устройство (не проиллюстрировано) посредством использования входных сигналов и предварительно сохраненной карты, предварительно сохраненного арифметического выражения и т.п.
Ниже описывается пример управления для переключения состояния зацепляющего механизма 1 с зацеплением зубчатого типа из состояния расцепления в состояние зацепления. Это управление проиллюстрировано на фиг. 1. Управление, которое проиллюстрировано на фиг. 1, многократно выполняется, когда зацепляющий механизм 1 с зацеплением зубчатого типа находится в состоянии расцепления. В случае, если двухпозиционный клапан 16 представляет собой нормально закрытый электромагнитный клапан, как описано выше, двухпозиционный клапан 16 не должен открываться, когда зацепляющий механизм 1 с зацеплением зубчатого типа находится в состоянии расцепления, и в силу этого двухпозиционный клапан 16 находится в закрытом состоянии, так что уменьшаются потери электроэнергии, обусловленные открытием двухпозиционного клапана 16. Давление на выходе EOP 14 задается низким, когда зацепляющий механизм 1 с зацеплением зубчатого типа находится в состоянии расцепления, так что уменьшаются потери мощности EOP 14 и т.п.
В примере, который проиллюстрирован на фиг. 1, сначала определяется присутствие или отсутствие инструкции для зацепления зацепляющего механизма 1 с зацеплением зубчатого типа (этап S1). На этапе S1 определение может выполняться посредством приема сигнала из другой системы управления, такой как система управления переключением передач. В случае, если предоставляется механизм управления переключением передач, и механизм управления переключением передач имеет такую конфигурацию, в которой предварительно определенная передача обеспечивается посредством зацепления зацепляющего механизма 1 с зацеплением зубчатого типа, например, можно определять то, задается или нет предварительно определенная передача, посредством устройства, управляющего механизмом управления переключением передач, и определение этапа S1 может выполняться на основе результата определения. В случае отрицательного определения на этапе S1 без инструкции для зацепления зацепляющего механизма 1 с зацеплением зубчатого типа, эта процедура временно завершается как есть.
В случае положительного определения на этапе S1 с инструкцией для зацепления зацепляющего механизма 1 с зацеплением зубчатого типа, двухпозиционный клапан 16 открывается (этап S2). В этом случае предпочтительно, чтобы частота вращения входного элемента 2 и частота вращения выходного элемента 3 были практически равны друг другу, как и в случае зацепляющих механизмов с зацеплением зубчатого типа, известных в предшествующем уровне техники. Управление для синхронизации частот вращений может быть аналогичным управлению, которое известно в предшествующем уровне техники, примеры которого включают в себя управление частотой вращения источника мощности и перегрузочной способностью по передаваемому крутящему моменту фрикционного зацепляющего механизма (не проиллюстрирован), который соединяется с зацепляющим механизмом 1 с зацеплением зубчатого типа.
Помимо этого, давление на выходе EOP 14 повышается до предварительно определенного значения (этап S3). Это предварительно определенное значение определяется таким образом, что рабочее усилие A, которое действует на поршень 6 на основе давления на выходе EOP 14, превышает усилие S сжатия пружины для возвратной пружины 8. Другими словами, это предварительно определенное значение определяется в качестве давления на выходе, которое дает возможность поршню 6 перемещаться в сторону входного элемента 2. Процедура для выполнения этапов S2 и S3 не ограничена конкретным образом.
Давление масла гидравлической камеры 10 повышается посредством открытия двухпозиционного клапана 16 и повышения давления на выходе EOP 14, как описано выше. Как результат, поршень 6 перемещается в сторону входного элемента 2. Затем определяется то, достигает или нет поршень 6 первого предварительно заданного положения (этап S4). Это определение этапа S4 может выполняться посредством определения положения первого датчика 12a хода поршня 6. Помимо этого, этот зацепляющий механизм 1 с зацеплением зубчатого типа выполнен с возможностью повышать давление масла гидравлической камеры 10 посредством передачи крутящего момента в состоянии, в котором гидравлическая камера 10 заполнена маслом, как описано ниже, и поршень 6 может немного подталкиваться обратно к стороне углубленной части 5 в этом случае. Предварительно заданная величина определяется на этапе S4 таким образом, что величины ввода в зубчатое зацепление соответствующих собачек 4, 7 равны или выше величины ввода в зубчатое зацепление, заданного на фазе конструирования, даже в том случае, когда поршень 6 подталкивается обратно.
В случае отрицательного определения на этапе S4, притом что поршень 6 по-прежнему должен достигать первого предварительно заданного положения, этап S4 многократно выполняется до тех пор, пока поршень 6 не достигнет первого предварительно заданного положения. В случае положительного определения на этапе S4 с поршнем 6 в первом предварительно заданном положении двухпозиционный клапан 16 закрыт (этап S5), и эта процедура временно завершается.
Изменения положения поршня 6, давления масла гидравлической камеры 10 и давления подачи масла (описано ниже), связанные со случаем управления, который проиллюстрирован на фиг. 1, проиллюстрированы на фиг. 2. Как проиллюстрировано на фиг. 2, масло не подается в гидравлическую камеру 10 в момент времени (момент t0 времени), когда зацепляющий механизм 1 с зацеплением зубчатого типа расцеплен, и в силу этого поршень 6 прижимается посредством возвратной пружины 8 и находится в самом удаленном положении на большом расстоянии от входного элемента 2. Положение поршня 6 на фиг. 2 соответствует расстоянию от нижней поверхности углубленной части 5, и фиг. 2 показывает то, что значение увеличивается по мере того, как поршень 6 приближается к входному элементу 2. В случае положительного определения на этапе S1 на фиг. 1 (момент t1 времени) флаг для зацепления зацепляющего механизма 1 с зацеплением зубчатого типа включается. В случае присутствия инструкции для зацепления зацепляющего механизма 1 с зацеплением зубчатого типа, как описано выше, двухпозиционный клапан 16 открывается (момент t2 времени). Почти одновременно, давление на выходе EOP 14 повышается, и давления масла второго масляного канала 15 и гидравлической камеры 10 начинают повышаться. В нижеприведенном описании давление масла второго масляного канала 15 упоминается в качестве давления подачи масла. Сплошная линия на фиг. 2 представляет давление подачи масла, а пунктирная линия на фиг. 2 представляет давление масла гидравлической камеры 10.
В ходе повышения давления масла гидравлической камеры 10, описанного выше, или в момент времени, когда давление масла достигает предварительно определенного значения на этапе S3 в результате увеличения, рабочее усилие A, которое действует на поршень 6, превышает усилие S сжатия пружины, и поршень 6 начинает перемещаться в сторону входного элемента 2 (момент t3 времени). Когда поршень 6 достигает предварительно заданного положения после этого (момент t4 времени), положительное определение выполняется на этапе S4 на фиг. 1, и затем двухпозиционный клапан 16 закрывается (момент t5 времени). Когда двухпозиционный клапан 16 закрыт, как описано выше, гидравлическая камера 10 заполнена маслом. Соответственно, когда крутящий момент вводится в зацепляющий механизм 1 с зацеплением зубчатого типа после того, как двухпозиционный клапан 16 закрыт, поршень 6 прижимается посредством высвобождающего усилия C, и сжимающее усилие действует на масло в гидравлической камере 10. Это сжимающее усилие увеличивается в соответствии с входным крутящим моментом. Как результат, давление масла гидравлической камеры 10 повышается в соответствии с входным крутящим моментом (момент t6 времени). Другими словами, формируется усилие реакции против высвобождающего усилия C. Поскольку масло представляет собой несжимаемую текучую среду, как описано выше, объем гидравлической камеры 10 редко изменяется, и давление масла гидравлической камеры 10 быстро повышается. Другими словами, давление масла гидравлической камеры 10 повышается постадийно, как проиллюстрировано на фиг. 2. Поскольку поршень 6 редко перемещается, как описано выше, изменение положения поршня 6 не показано на фиг. 2. Поскольку усилие реакции формируется при повышении давления масла гидравлической камеры 10, как описано выше, состояние зацепления поддерживается даже в случае, если крутящий момент вводится в зацепляющий механизм 1 с зацеплением зубчатого типа.
В примере, который проиллюстрирован на фиг. 2, давление подачи масла уменьшается, так что потери мощности источника гидравлического давления и т.п. уменьшаются после того, как двухпозиционный клапан 16 закрывается. Давление подачи масла может уменьшаться после того, как давление масла гидравлической камеры 10 повышается, как проиллюстрировано на фиг. 2, или давление подачи масла может уменьшаться до того, как давление масла гидравлической камеры 10 повышается. Другими словами, время, когда давление подачи масла уменьшается, может придерживаться закрытия двухпозиционного клапана 16.
В зацепляющем механизме 1 с зацеплением зубчатого типа, который сконфигурирован так, как описано выше, повышается давление масла, поданного в гидравлическую камеру 10, и усилие реакции против высвобождающего усилия C формируется в результате передачи крутящего момента. Соответственно, давление подачи масла может быть относительно низким давлением масла, которое дает возможность перемещения поршня 6, и в силу этого потери мощности EOP 14 могут уменьшаться. Помимо этого, поскольку давление масла гидравлической камеры 10 повышается в соответствии с крутящим моментом, как описано выше, давление, которое требуется для поддержания состояния зацепления, может получаться, даже когда площадь приема давления, которая подвергается действию давления масла, является небольшой. Соответственно, площадь приема давления гидравлической камеры 10 может уменьшаться, и в силу этого уменьшается объем гидравлической камеры 10. Соответственно, объем масла, который требуется, когда зацепляющий механизм 1 с зацеплением зубчатого типа зацепляется, может уменьшаться, и потери мощности из EOP 14 могут уменьшаться. Помимо этого, поскольку может уменьшаться объем гидравлической камеры 10, может сокращаться продолжительность, требуемая на то, чтобы завершать ввод в зацепление соответствующих собачек 4, 7 после начала подачи масла в гидравлическую камеру 10.
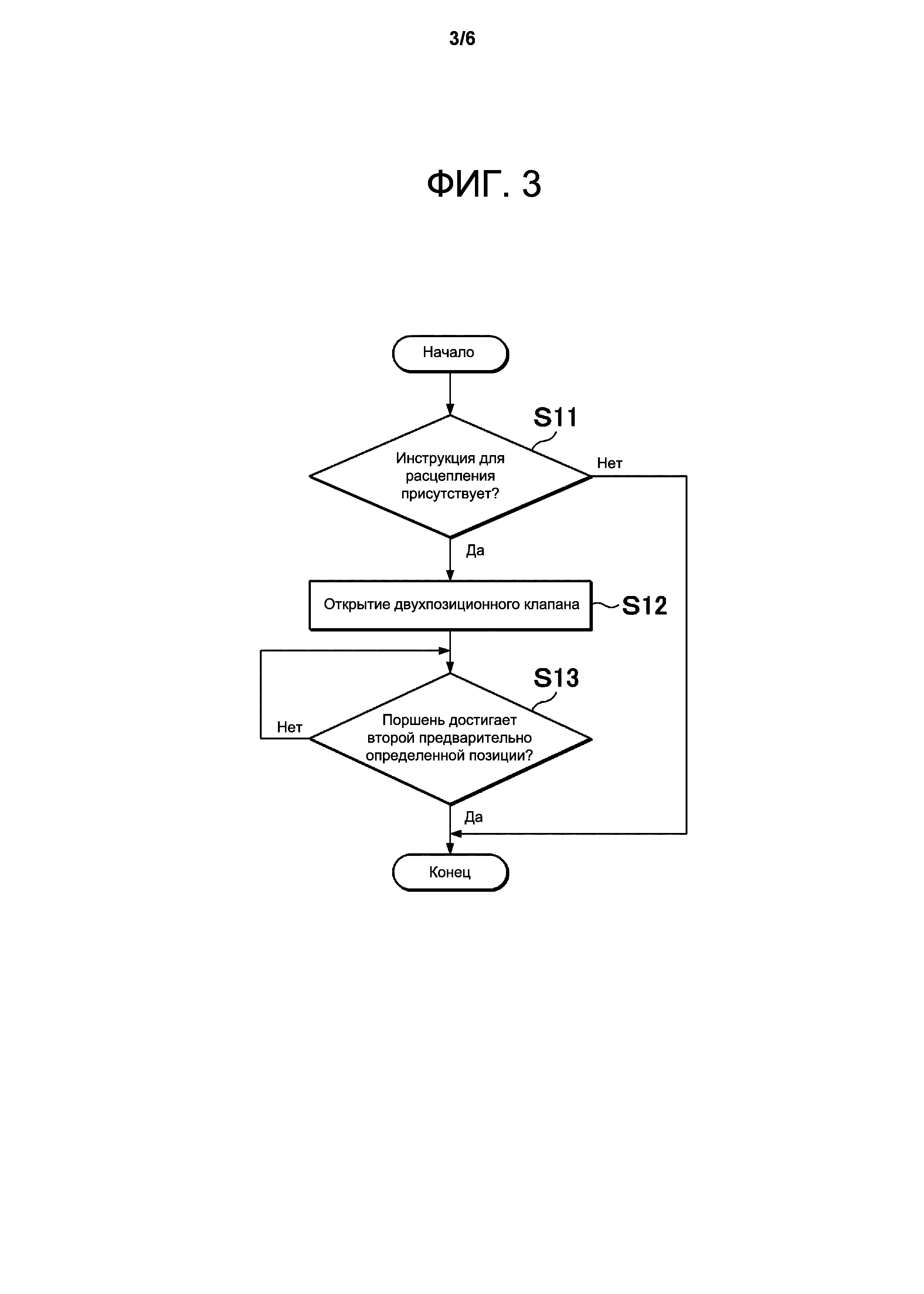
В случае, если зацепляющий механизм 1 с зацеплением зубчатого типа расцеплен, как описано выше, крутящий момент может передаваться в зацепляющий механизм 1 с зацеплением зубчатого типа при том, что уменьшается давление масла гидравлической камеры 10. Пример управления двухпозиционным клапаном 16 в ходе расцепления зацепляющего механизма 1 с зацеплением зубчатого типа проиллюстрирован на фиг. 3. Пример, который проиллюстрирован на фиг. 3, многократно выполняется в случае, если зацепляющий механизм 1 с зацеплением зубчатого типа зацепляется. Сначала определяется присутствие или отсутствие инструкции для расцепления зацепляющего механизма 1 с зацеплением зубчатого типа (этап S11). На этапе S11 определение может выполняться посредством приема сигнала из другой системы управления, такой как система управления переключением передач, в случае этапа S1, описанного выше. В случае отрицательного определения на этапе S11 без инструкции для расцепления зацепляющего механизма 1 с зацеплением зубчатого типа, эта процедура временно завершается как есть.
В случае положительного определения на этапе S11 с инструкцией для расцепления зацепляющего механизма 1 с зацеплением зубчатого типа двухпозиционный клапан 16 открывается (этап S12). Масло в гидравлической камере 10 вытекает к второму масляному каналу 15, когда гидравлическая камера 10 и второй масляный канал 15 сообщаются между собой посредством открытия двухпозиционного клапана 16. Это обусловлено тем, что давление масла гидравлической камеры 10 является относительно высоким давлением масла, которое повышается посредством прижатия поршня 6, и давление масла второго масляного канала 15 задается в качестве относительно низкого давления масла, так что потери мощности EOP 14 уменьшаются, как описано выше. Когда масло протекает через второй масляный канал 15, как описано выше, предпочтительно, чтобы клапан 17 для снижения давления был открытым, и давление масла второго масляного канала 15 поддерживался постоянным. Это обусловлено тем, что становится маловероятным то, что масло вытекает из гидравлической камеры 10, и расцепление зацепляющего механизма 1 с зацеплением зубчатого типа может замедляться, когда вытекание масла из гидравлической камеры 10 к второму масляному каналу 15 приводит к повышению давления масла второго масляного канала 15.
Открытие двухпозиционного клапана 16 и уменьшение давления масла гидравлической камеры 10, описанные выше, заставляют поршень 6 начинать перемещаться в сторону углубленной части 5 посредством высвобождающего усилия C, действующего на вторые собачки 7, и усилия S сжатия пружины для возвратной пружины 8. Зацепляющий механизм 1 с зацеплением зубчатого типа расцеплен, когда поршень 6 перемещается, как описано выше, чтобы заставлять соответствующие собачки 4, 7 не вводиться в зубчатое зацепление между собой. Соответственно, определяется (этап S13) то, достигает или нет поршень 6 второго предварительно заданного положения со стороны входного элемента 2 на этапе S12. Положение поршня 6 на этапе S13 может определяться посредством второго датчика 12b хода. Второе предварительно заданное положение на этапе S13 является положением, в котором соответствующие собачки 4, 7 начинают прекращение ввода в зубчатое зацепление между собой, и является значением, которое определяется из конструкций соответствующих собачек 4, 7. В случае отрицательного определения на этапе S13 при том, что поршень 6 по-прежнему должен достигать предварительно заданного положения, этап S13 многократно выполняется до тех пор, пока поршень 6 не достигнет второго предварительно заданного положения. В случае положительного определения на этапе S13 с поршнем 6 во втором предварительно заданном положении, эта процедура временно завершается. В случае, если зацепляющий механизм 1 с зацеплением зубчатого типа расцеплен, двухпозиционный клапан 16 может оставаться открытым или закрытым. Соответственно, в случае вышеописанного нормально закрытого электромагнитного клапана, предпочтительно, чтобы двухпозиционный клапан 16 оставался закрытым, так что уменьшаются потери электроэнергии. Помимо этого, поскольку формирование давления масла посредством EOP 14 не требуется, давление подачи масла поддерживается равным относительно низкому давлению масла, уменьшенному посредством клапана 17 для снижения давления.
Изменения положения поршня 6, давления масла гидравлической камеры 10 и давления подачи масла, связанные со случаем, в котором выполняется управление, которое проиллюстрировано на фиг. 3, проиллюстрированы на фиг. 4. Сплошная линия на фиг. 4 представляет давление подачи масла, а пунктирная линия на фиг. 4 представляет давление масла гидравлической камеры 10. В примере, который проиллюстрирован на фиг. 4, давление масла гидравлической камеры 10 сначала поддерживается равным относительно высокому давлению масла (момент t10 времени). Это обусловлено тем, что крутящий момент вводится в зацепляющий механизм 1 с зацеплением зубчатого типа в состоянии, в котором гидравлическая камера 10 заполнена маслом, как описано выше. Давление подачи масла поддерживается равным давлению масла, которое уменьшается в момент t6 времени, который проиллюстрирован на фиг. 2. Это давление масла является давлением масла, которое ниже давления масла, которое задается, когда поршень 6 перемещается в сторону входного элемента 2. В случае присутствия инструкции для расцепления зацепляющего механизма 1 с зацеплением зубчатого типа (момент t11 времени), двухпозиционный клапан 16 открывается после этого (момент t12 времени). Давление масла гидравлической камеры 10 уменьшается посредством открытия двухпозиционного клапана 16. В этом случае давление масла гидравлической камеры 10 может быть быстро уменьшено посредством управления клапаном 17 для снижения давления таким образом, что давление подачи масла не изменяется. Затем поршень 6 начинает перемещаться (момент t13 времени) посредством уменьшения давления масла гидравлической камеры 10. Когда поршень 6 достигает второго предварительно заданного положения (момент t14 времени), зацепляющий механизм 1 с зацеплением зубчатого типа расцеплен. В примере, который проиллюстрирован на фиг. 4, двухпозиционный клапан 16 переводится в закрытое состояние (момент t15 времени) после того, как поршень 6 достигает второго предварительно заданного положения.
В случае, если зацепляющий механизм 1 с зацеплением зубчатого типа расцеплен, как описано выше, двухпозиционный клапан 16 может открываться в состоянии, в котором крутящий момент продолжает вводиться в зацепляющий механизм 1 с зацеплением зубчатого типа. Соответственно, может упрощаться управление для расцепления зацепляющего механизма 1 с зацеплением зубчатого типа, как описано выше.
Зацепляющий механизм 1 с зацеплением зубчатого типа согласно изобретению не ограничен конфигурацией, которая формирует рабочее усилие A посредством предоставления возможности давлению масла действовать непосредственно на поршень 6. Например, зацепляющий механизм 1 с зацеплением зубчатого типа может иметь такую конфигурацию, в которой гидравлический исполнительный механизм соединяется с поршнем 6, и поршень 6 прижимается к стороне входного элемента 2 посредством рабочего усилия A гидравлического исполнительного механизма. В случае этой конфигурации гидравлическая схема может иметь такую конфигурацию, в которой гидравлическая камера гидравлического актуатора может быть заполнена маслом.
Текучая среда, которая подается в гидравлическую камеру 10, может представлять собой сжимаемую текучую среду вместо несжимаемой текучей среды. В случае, если сжимаемая текучая среда подается в гидравлическую камеру 10, ввод крутящего момента в зацепляющий механизм 1 с зацеплением зубчатого типа в состоянии, в котором гидравлическая камера 10 заполнена текучей средой, вызывает сжатие текучей среды в гидравлической камере 10 и значительное перемещение поршня 6 в сторону углубленной части 5. Соответственно, величина, на которую поршень 6 подталкивается обратно к стороне углубленной части 5, может получаться из давления текучей среды, которая подается в гидравлическую камеру 10 для зацепления соответствующих собачек 4, 7, и крутящего момента T, который вводится в зацепляющий механизм 1 с зацеплением зубчатого типа, и позиция, которая получается посредством суммирования величины перемещения, полученной так, как описано выше, с величиной ввода в зубчатое зацепление, заданной на фазе конструирования, может рассматриваться в качестве первого предварительно заданного положения, описанного выше. Это управление дает возможность поддержания состояния зацепления даже в случае, если крутящий момент вводится в зацепляющий механизм 1 с зацеплением зубчатого типа. Помимо этого, двухпозиционный клапан 16 может быть заменен переключающим клапаном, который выполнен с возможностью предоставлять возможность второму масляному каналу 15 и гидравлической камере 10 сообщаться между собой при открытии и закрытии выходного порта 16b, чтобы герметизировать гидравлическую камеру 10, и выпускать масло из второго масляного канала 15 посредством предоставления возможности второму масляному каналу 15 и сливному порту (не проиллюстрирован) сообщаться между собой в случае закрытия.
Реферат
Изобретение относится к зацепляющим механизмам зубчатого типа. Система управления для зацепляющего механизма с зацеплением зубчатого типа, включающего в себя первый и второй элемент с множеством первых и вторых собачек соответственно, камеру для текучей среды и переключающий клапан, содержит электронный блок управления подачей и прекращением подачи текучей среды в камеру для текучей среды посредством переключающего клапана. Электронный блок управления обеспечивает заполнение камеры для текучей среды посредством управления переключающего клапана. Решение направлено на упрощение управления. 5 з.п. ф-лы, 7 ил.
Формула
Документы, цитированные в отчёте о поиске
Приводной инструмент
Комментарии