Сенсорная панель для ручного управления механическим оборудованием - RU2713612C2
Код документа: RU2713612C2
Чертежи




Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к сенсорной панели портативной панели управления, которая применяется в случае, когда различные типы механического оборудования, которые обычно управляются автоматически, в частности, различные типы механического оборудования, которые принадлежат к области транспортировки материалов, управляются вручную в критической ситуации.
Уровень техники
[0002] Было принято во внимание, что, в качестве панели управления для ручного управления механическим оборудованием используется панель управления, которая обычно называется планшетом, таким как ручной терминал или блокнотный персональный компьютер, и который включает в себя сенсорную панель, на которой операция касания может выполняться на экране. Хотя патентная литература, в которой описывается предпочтительный обычный пример для такой сенсорной панели для ручного управления механическим оборудованием, не может быть предоставлена, можно принимать во внимание, что в ее обычно возможной конфигурации в окнах, отображаемых на экране на индивидуальных этапах ручного управления, отображаются различные типы информации для оператора, такие как подробности предполагаемой операции, подлежащей выполнению, и предварительное условие для безопасного выполнения операции, и отображается изображение кнопки операции продолжения для выполнения операции, изображение кнопки операции останова для случая, когда имеет место затруднение, если операция выполняется, в то же время сохраняя текущие условия и т.п. В любом случае, чтобы использовались свойства сенсорной панели, операция для изображения кнопки операции продолжения, изображения кнопки операции останова или т.п. представляет собой операцию касания, которая выполняется кончиком пальца оператора.
Сущность изобретения
Техническая проблема
[0003] Так как в сенсорной панели, рассматриваемой для использования так, как описано выше, только касанием изображения кнопки предполагаемой операции может выполняться операция, ассоциированная с изображением кнопки операции, по сравнению, например, с операцией обычного персонального компьютера, в которой должна выполняться операция щелчка в состоянии, когда курсор мыши или сенсорной панели располагается поверх изображения кнопки предполагаемой операции, является возможным очень быстро и легко выполнять предполагаемую операцию. Однако существует вероятность, что это свойство работает отрицательно, когда изображение кнопки операции касается непреднамеренно, и выполняется операция, ассоциированная с изображением кнопки операции, в непреднамеренный момент времени. В частности, так как механическое оборудование управляется вручную, в случае, когда операция выполняется в непреднамеренный момент времени, это может привести к значительному повреждению механического оборудования или несчастному случаю, вызывающему травму или смерть.
Решение проблемы
[0004] Настоящее изобретение предлагает сенсорную панель для ручного управления механическим оборудованием, которая может решить обычную проблему, описанную выше, и для легкого понимания зависимости с вариантом осуществления, который описывается ниже, сенсорная панель для ручного управления механическим оборудованием согласно настоящему изобретению изображена с ссылочными позициями, которые используются в описании варианта осуществления, и которые помещены в круглые скобки. Она выполнена так, что в сенсорной панели портативной панели управления для ручного управления механическим оборудованием, на экране управления для выполнения механическим оборудованием конкретной операции обеспечивается подвижный участок экрана (изображение (32) кнопки операции смахивания), который может перемещаться по экрану посредством операции смахивания, и изображение кнопки операции (изображение (33) кнопки операции продолжения), которое отображается в том месте, с которого переместился подвижный участок экрана (изображение (32) кнопки операции смахивания), когда перемещается подвижный участок экрана, и, посредством выполнения операции касания на изображении кнопки операции (изображении (33) кнопки операции продолжения) после операции смахивания на подвижном участке экрана (изображении (32) кнопки операции смахивания), механическое оборудование выполняет конкретную операцию.
Полезные эффекты изобретения
[0005] В конфигурации настоящего изобретения, описанной выше, так как изображение кнопки операции, на котором выполняется операция касания, чтобы механическое оборудование выполняло конкретную операцию, не отображается без того, чтобы подвижный участок экрана переместился операцией смахивания, даже если выполняется касание любого места на экране управления перед операцией смахивания на подвижном участке экрана, полностью предотвращается непреднамеренное выполнение механическим оборудованием конкретной операции. Кроме того, тот факт, что необходимо выполнить операцию смахивания на подвижном участке экрана перед выполнением конкретной операции означает, что также обеспечивается время для определения, должна ли или нет выполняться конкретная операция, с результатом, что ручная операция для выполнения механическим оборудованием конкретной операции может безопасно выполняться с достаточным запасом.
[0006] При осуществлении настоящего изобретения, хотя подвижный участок экрана, предпочтительно, формируется со специальным изображением кнопки операции смахивания, на котором отображается направление операции смахивания, изображение кнопки операции смахивания также служит в качестве изображения кнопки операции останова для останова выполнения конкретной операции на механическом оборудовании, и, когда операция касания выполняется на изображении кнопки операции останова, останавливается выполнение конкретной операции на механическом оборудовании, тогда как операция смахивания выполняется на изображении кнопки операции останова в заданном направлении, может быть выполнено появление изображения кнопки операции для выполнения механическим оборудованием конкретной операции так, как ожидается. С такой конфигурацией уменьшается количество изображений кнопок, которое необходимо для отображения на экране управления, и, таким образом, возможно достижение простой конфигурации экрана. Кроме того, даже если операция касания ошибочно выполняется вместо операции смахивания, результатом является просто останов выполнения конкретной операции на механическом оборудовании, и, таким образом, нет опасности, что непреднамеренно будет выполняться другая операция. Отмечается, что, в случае, когда осуществляется такая конфигурация, предпочтительно, просто конфигурируется, что отображается изображение кнопки операции останова, также служащее в качестве изображения кнопки операции смахивания, как если бы она, несомненно, являлась кнопкой операции останова, и стрелка, указывающая направление смахивания, дополнительно отображается на этом изображении.
[0007] Кроме того, так как на экране управления сенсорной панели, на каждом этапе ручной операции, отображается окно для отображения подлежащей отображению информации, относящейся к предполагаемой тогда ручной операции, оператору, является возможным сконфигурировать окно, так что окно перемещается по экрану операцией смахивания, окно выполнено так, что служит в качестве подвижного участка экрана, и, таким образом, изображение кнопки операции отображается в небольшом окне, отображаемом на месте, с которого окно переместилось, когда окно перемещается операцией смахивания. В этом случае, в окне отображается отображение (такое как стрелка), указывающее направление операции смахивания. Как описано выше, само окно, которое первоначально необходимо, выполнено также так, что служит в качестве цели операции смахивания, в котором отображается направление операции смахивания, и, таким образом, является возможным просто сконфигурировать экран управления.
[0008] Кроме того, посредством конфигурирования, так что, когда операция касания не выполняется на изображении кнопки операции в пределах установленного времени после операции смахивания на подвижном участке экрана, подвижный участок экрана автоматически возвращается, так что скрывается изображение кнопки операции, и, таким образом, предотвращается по неосторожности продолжение отображения изображения кнопки операции в течение длительного периода времени, является возможным дополнительно повысить безопасность.
Краткое описание чертежей
[0009] [Фиг. 1] Фиг. 1A и Фиг. 1В изображает подвесной транспортный конвейер в качестве примера механического оборудования согласно настоящему изобретению, при этом Фиг. 1A представляет собой вид сбоку, иллюстрирующий конфигурацию расположения перехода транспортного перемещаемого тела с переднего по ходу участка пути перемещения на задний по ходу участок пути перемещения, и Фиг. 1B представляет собой вид сверху Фиг. 1A.
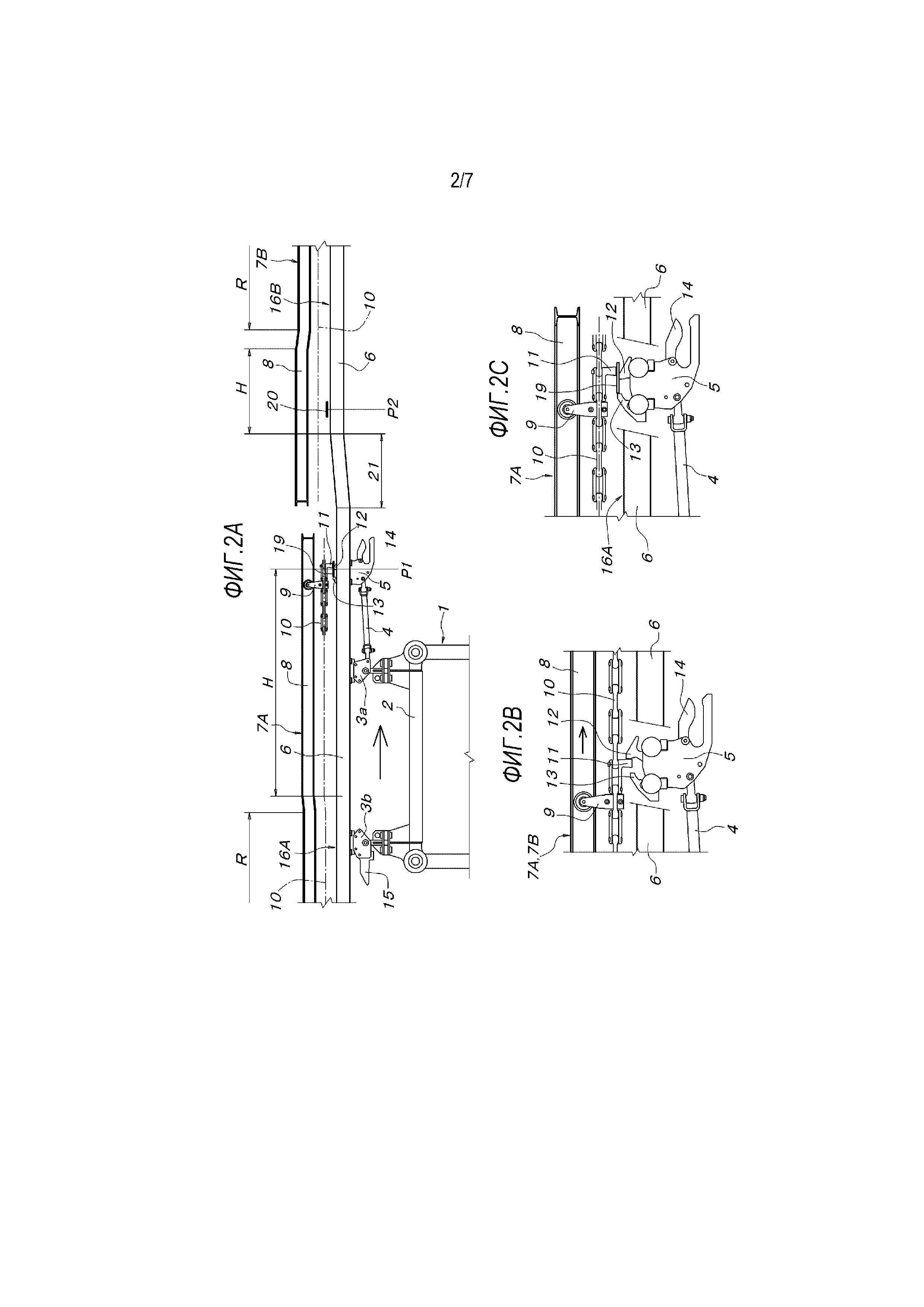
[Фиг. 2] Фиг. 2A представляет собой вид сбоку, иллюстрирующий состояние, когда транспортное перемещаемое тело останавливается в положении фиксированного останова терминального конца переднего по ходу участка пути перемещения, и Фиг. 2B представляет собой увеличенный вид с частичным вырезом главной части Фиг. 2A, и Фиг. 2C представляет собой увеличенный вид сбоку с частичным вырезом главной части, изображающий состояние, когда транспортное перемещаемое тело приводится в движение на участке пути перемещения.
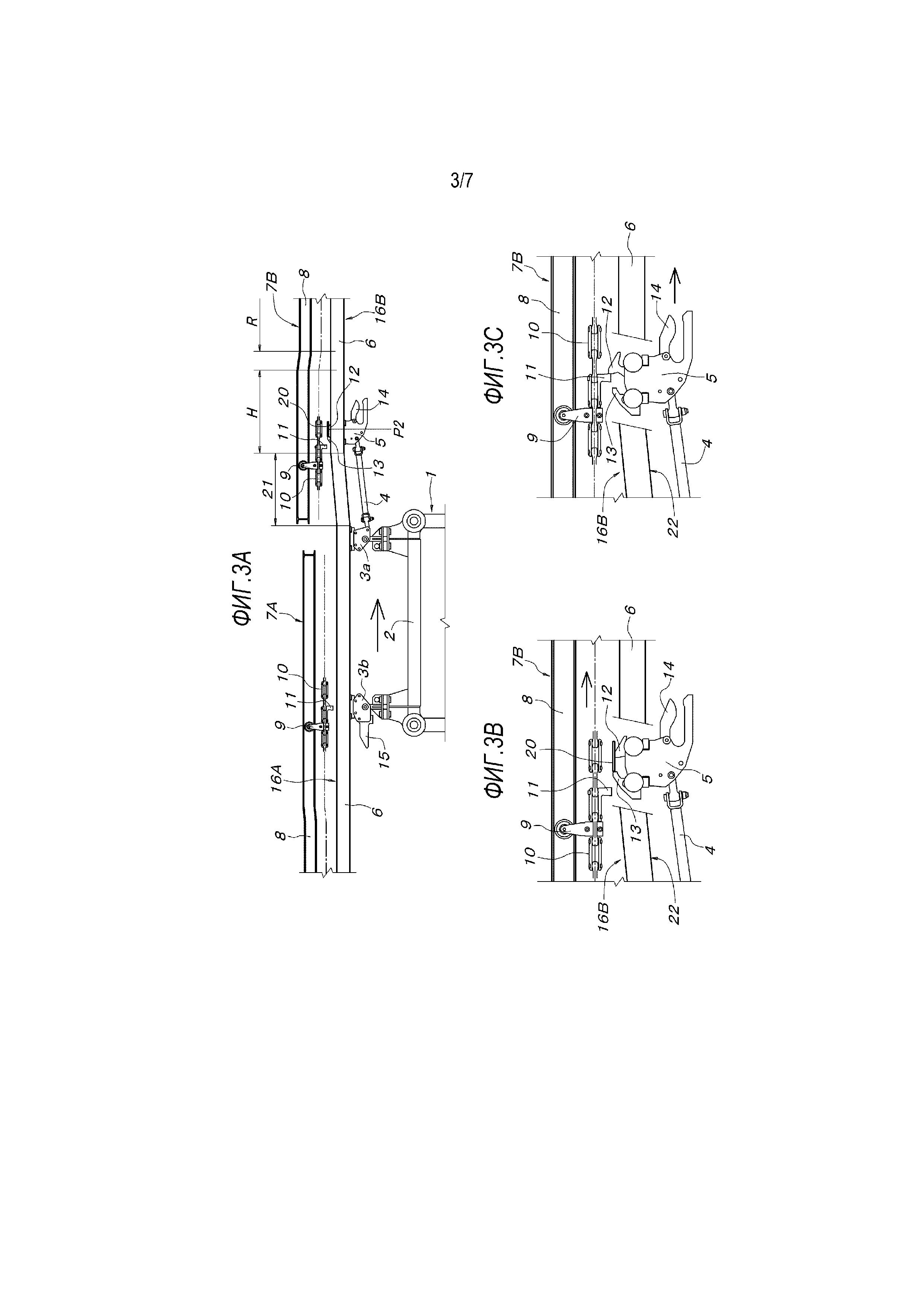
[Фиг. 3] Фиг. 3A представляет собой вид сбоку, иллюстрирующий состояние, когда транспортное перемещаемое тело останавливается в положении фиксированного останова на начальном конце заднего по ходу участка пути перемещения, Фиг. 3B представляет собой увеличенный вид с частичным вырезом главной части Фиг. 3A, и Фиг. 3C представляет собой увеличенный вид с частичным вырезом главной части, изображающий этап, на котором начинается приведение в движение транспортного перемещаемого тела из состояния на Фиг. 3B.
[Фиг. 4] Фиг. 4 представляет собой блок-схему последовательности операций, изображающую последовательность операций в случае, когда управление переходом транспортного перемещаемого тела на вышеупомянутом подвесном конвейере выполняется посредством ручной операции.
[Фиг. 5] Фиг. 5A-5C представляют собой иллюстративные диаграммы, изображающие экран отображения на первом этапе управления на сенсорной панели панели управления, используемый при ручной операции.
[Фиг. 6] Фиг. 6A-6C представляют собой иллюстративные диаграммы, изображающие экран отображения на втором этапе управления на сенсорной панели панели управления, используемый при ручной операции.
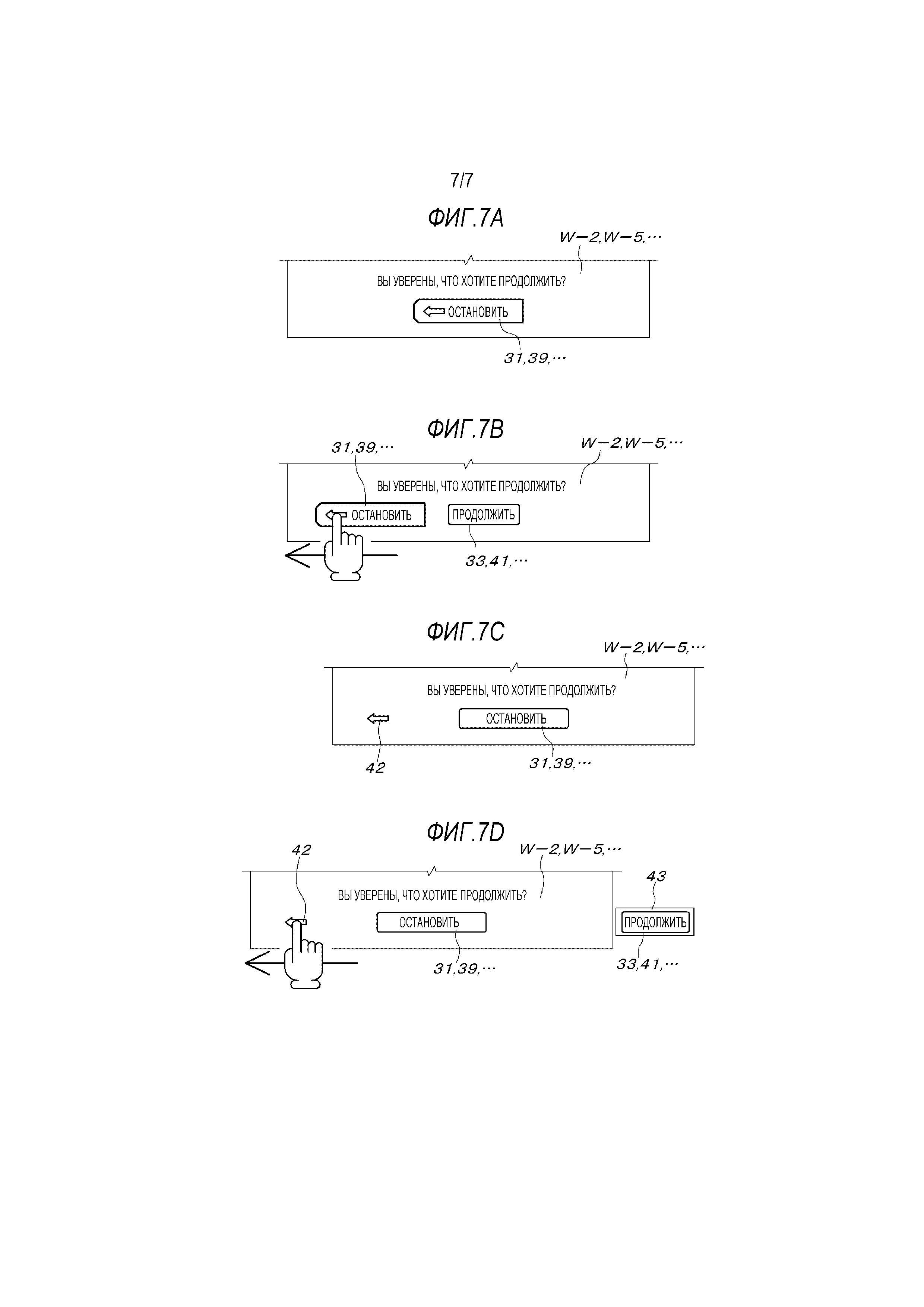
[Фиг. 7] Фиг. 7A-7D представляют собой иллюстративные диаграммы, изображающие другой вариант осуществления экрана отображения на сенсорной панели панели управления, используемого при ручной операции.
Описание вариантов осуществления
[0010] В качестве примера механического оборудования, к которому применимо настоящее изобретение, сначала описывается подвесной транспортный конвейер с ссылкой на Фиг. 1-3. Ссылочная позиция 1 обозначает транспортное перемещаемое тело, и транспортное перемещаемое тело 1 включает в себя две переднюю и заднюю грузонесущие каретки 3a и 3b, которые подвешивают как передние, так и задние оконечные участки основного участка 2 тела подвесного типа для поддержания транспортируемого объекта, и приводную каретку 5, которая соединена с передней частью передней грузонесущей каретки 3a посредством соединительной тяги 4. Путь перемещения транспортного перемещаемого тела 1 формируется направляющим рельсом 6, который поддерживает грузонесущие каретки 3a и 3b и приводную каретку 5, так что они свободно перемещаются. Ссылочные позиции 7A и 7B обозначают приводное средство для транспортного перемещаемого тела 1, и приводное средство образовано направляющим рельсом 8, который уложен на верхнюю сторону направляющего рельса 6 вдоль направляющего рельса 6 транспортного перемещаемого тела 1, приводной цепью 10, которая подвешивается направляющим рельсом 8 посредством кареток 9, и толкателей 11, которые обеспечиваются так, что выступают вниз из приводной цепи 10 вблизи кареток 9 в положениях с соответствующими интервалами в направлении длины приводной цепи 10. Как общеизвестно, приводная цепь 10 изгибается по замкнутому пути, включающего в себя часть путь вдоль пути перемещения (направляющего рельса 6) транспортного перемещаемого тела 1, и приводится в движение с заданной скоростью при помощи звездочек с приводом от двигателя, которые обеспечиваются в соответствующих расположениях на замкнутом пути.
[0011] В приводной каретке 5 транспортного перемещаемого тела 1 обеспечиваются приводной упор 12, который свободно поднимается и опускается, стопорный упор 13, который располагается в задней части приводного упора 12, и приводимая в действие деталь 14, которая выступает вперед из приводной каретки 5, и которая свободно поворачивается в вертикальном направлении. Приводной упор 12 и приводимая в действие деталь 14 выполнены так, что они сцеплены и соединены друг с другом, так что приводной упор 12 сцепляется при движении вверх приводимой в действие детали 14, чтобы опускаться из предельного положения движения вверх, и приводной упор 12 отклоняется под действием силы тяжести, действуя на приводимую в действие деталь 14, чтобы удерживаться в предельном положении движения вверх. В задней грузонесущей каретке 3b транспортного перемещаемого тела 1 обеспечивается приводящая в действие деталь 15 для опускания, когда транспортные перемещаемые тела 1 передвигаются близко друг к другу, приводного упора 12 приводной каретки 5 в транспортном перемещаемом теле 1 на задней стороне посредством перемещения вверх приводимой в действие детали 14 приводной каретки 5 в транспортном перемещаемом теле 1 на задней стороне, которая выступает назад.
[0012] Стопорный упор 13 поддерживается с возможностью поворота, чтобы свободно падать вперед и назад и смещается и удерживается силой тяжести, имея стоячее положение. Стопорный упор 13 в стоячем положении выполнен так, что находиться на одну ступень ниже верхнего конца приводного упора 12 в предельном положении движения вверх. Затем на части пути приведения в движение, где транспортное перемещаемое тело 1 приводится в действие посредством приводного средства 7A и 7B, расстояние в направлении вверх/вниз между направляющим рельсом 6 для направления транспортного перемещаемого тела 1 (каретки 3a, 3b и 5) и направляющим рельсом 8 для направления толкателя 11 (приводной цепи 10) устанавливается на стандартное расстояние, так что толкатель 11, который перемещается и приближается сзади транспортного перемещаемого тела 1, заставляет стопорный упор 13 падать вперед и назад, выполняет соприкосновение с и толкает верхний оконечный участок приводного упора 12 в предельное положение движения вверх сзади непосредственно после прохождения через положение стопорного упора 13, и заставляет приводную каретку 5 и, следовательно, транспортное перемещаемое тело 1, перемещаться вперед посредством приводного упора 12. Когда толкатель 11 приводит в движение транспортное перемещаемое тело 1, стопорный упор 13 возвращается в стоячее положение, чтобы располагаться на задней стороне толкателя 11, и, таким образом, стопорный упор 13 выполняет соприкосновение с толкателем 11, чтобы предотвратить перемещение приводной каретки 5 транспортного перемещаемого тела 1 впереди толкателя 11.
[0013] Как показано на Фиг. 1A и Фиг. 1B, путь перемещения транспортного перемещаемого тела 1 сегментируется на передний по ходу путь 16A перемещения, на котором транспортное перемещаемое тело 1 приводится в движение передним по ходу приводным средством 7A для перемещения, и задний по ходу путь 16B перемещения, на котором транспортное перемещаемое тело 1 приводится в движение задним по ходу приводным средством 7B для перемещения. В расположении соединения переднего по ходу пути 16A перемещения и заднего по ходу пути 16B перемещения поддерживается с возможностью поворота направляющая звездочка 17, которая отводит приводную цепь 10 переднего по ходу приводного средства 7A в сторону от переднего по ходу пути 16A перемещения, и направляющая звездочка 18, которая направляет приводную цепь 10 заднего по ходу приводного средства 7B на задний по ходу путь 16B перемещения. Кроме того, на терминальном оконечном участке переднего по ходу пути 16A перемещения и на начальном оконечном участке заднего по ходу пути 16B перемещения устанавливаются положения P1 и P2 фиксированного останова, и в соответствующих положениях P1 и P2 фиксированного останова обеспечиваются стопоры 19 и 20 для останова транспортного перемещаемого тела 1 в соответствующих положениях P1 и P2 фиксированного останова, и которые являются свободно выдвигаемыми вперед и убираемыми.
[0014] На терминальном оконечном участке переднего по ходу пути 16A перемещения и на начальном оконечном участке заднего по ходу пути 16B перемещения обеспечиваются области H с большим расстоянием, на которых расстояние в направлении верх/вниз между направляющим рельсом 6 для направления транспортного перемещаемого тела 1 и направляющим рельсом 8 для направления толкателя 11, больше стандартного расстояния, показанного на Фиг. 2C, стопор 19 в положении P1 фиксированного останова терминального оконечного участка переднего по ходу пути 16A перемещения обеспечивается на терминальном оконечном участке области H с большим расстоянием на терминальном оконечном участке переднего по ходу пути 16A перемещения, и стопор 20 в положении P2 фиксированного останова на начальном оконечном участке заднего по ходу пути 16B перемещения обеспечивается в положении, близком к начальному концу области H с большим расстоянием на начальном оконечном участке заднего по ходу пути 16B перемещения.
[0015] Соответствующие стопоры 19 и 20 приводятся в действие исполнительным механизмом, таким как соленоид или блоком цилиндра, чтобы они были выдвигаемыми вперед и убираемыми в перпендикулярно горизонтальном направлении относительно пути перемещения приводного упора 12 в приводной каретке 5 транспортного перемещаемого тела 1, и выполнено так, что, когда соответствующие стопоры 19 и 20 располагаются в положениях действия, выдвинутых на путь перемещения приводного упора 12, приводной упор 12 толкается вниз посредством использования передней наклонной поверхности приводного упора 12, когда приводная каретка 5 приводного упора 12 движется вперед, приводной упор 12 отпускается вниз от толкателя 11, толкающего приводной упор 12 с задней стороны, и, после этого, стопоры 19 и 20 соприкасаются с верхним оконечным участком стопорного упора 13, воспринимая приводную каретку 5 (транспортное перемещаемое тело 1). Когда стопоры 19 и 20 останавливают приводные каретки 5 в положениях P1 и P2 фиксированного останова, верхняя поверхность стопоров 19 и 20 и верхний конец стопорного упора 13 в стоячем состоянии находятся, по существу, на одном и том же уровне, и, таким образом, последующий толкатель 11 может перемещаться и проходить мимо верхней стороны стопоров 19 и 20 и стопорного упора 13.
[0016] Области на более передней по ходу стороне относительно области H с большим расстоянием на переднем по ходу пути 16A перемещения и на более задней по ходу стороне относительно области H с большим расстоянием на заднем по ходу пути 16B перемещения представляют собой области R со стандартным расстоянием. В области R со стандартным расстоянием, как показано на Фиг. 2C, расстояние в направлении вверх/вниз между направляющим рельсом 6 для направления транспортного перемещаемого тела 1 и направляющим рельсом 8 для направления толкателя 11 представляет собой расстояние, на котором толкатель 11 зацепляется между приводным упором 12 и стопорным упором 13, и на котором в состоянии, когда действует стопорный упор 13, толкатель 11 может приводить в движение приводную каретку 5 (транспортное перемещаемое тело 1). Отмечается, что, на более передней по ходу стороне относительно области H с большим расстоянием на заднем по ходу пути 16B перемещения, участок 21 пути с подъемом, имеющий соответствующую длину, обеспечивается на направляющем рельсе 6 для направления транспортного перемещаемого тела 1.
[0017] Как показано на Фиг. 1A, дополнительно обеспечивается устройство 22 подачи, которое отправляет транспортное перемещаемое тело 1 из положения P1 фиксированного останова на терминальном оконечном участке переднего по ходу пути 16A перемещения в положение P2 фиксированного останова на начальном оконечном участке заднего по ходу пути 16B перемещения. Устройство 22 подачи может быть образовано, например, со стопорным толкателем 24, который приводится в действие выталкиванием или втягиванием посредством блока 23 цилиндра, и устройство 22 подачи толкает соответствующую часть транспортного перемещаемого тела 1 с задней стороны и, таким образом, может отправлять транспортное перемещаемое тело 1 из положения P1 фиксированного останова в положение P2 фиксированного останова. Само собой разумеется, что устройство 22 подачи не ограничивается устройством подачи, который выполнен с блоком 23 цилиндра и стопорным толкателем 24, но устройство 22 подачи также может быть образовано со стопорным толкателем, который приводится в действие цепью или винтом.
[0018] Система подвесного конвейера, выполненная так, как описано выше, может использоваться следующим образом. Т.е. до того как транспортное перемещаемое тело 1, приводимое в движение толкателем 11 переднего по ходу приводного средства 7A на переднем по ходу пути 16A перемещения, достигнет терминального оконечного участка переднего по ходу пути 16A перемещения, стопор 19 в положении P1 фиксированного останова выдвигается в положение действия. Как правило, переключение стопора 19 в положение действия в данном случае выполняется в незанятом состоянии, когда другое транспортное перемещаемое тело 1 не присутствует в зоне перехода, которая включает в себя область терминального оконечного участка переднего по ходу пути 16A перемещения и область начального оконечного участка заднего по ходу пути 16B перемещения. Тогда, когда транспортное перемещаемое тело 1 (см. Фиг. 2C), приводимое в движение толкателем 11 переднего по ходу приводного средства 7A, достигает терминального оконечного участка переднего по ходу пути 16A перемещения, как показано на Фиг. 2A и 2B, приводной упор 12 приводной каретки 5, толкаемый толкателем 11 сзади, отжимается вниз стопором 19, толкатель 11 освобождается от приводного упора 12, проходя, фактически, мимо него, и стопор 19 соприкасается со стопорным упором 13, воспринимая приводную каретку 5, в результате чего транспортное перемещаемое тело 1 автоматически останавливается в положении P1 фиксированного останова. Как показано на Фиг. 1A, стопорный толкатель 24 устройства 22 подачи располагается в предельном положении втягивания, и транспортное перемещаемое тело 1 складывает стопорный толкатель 24, чтобы пройти мимо него, и затем автоматически останавливается стопором 19 в положении P1 фиксированного останова. В этот момент, расположение для толкания сзади транспортного перемещаемого тела 1, который толкается сзади стопорным толкателем 24, располагается непосредственно перед стопорным толкателем 24 в предельном положении втягивания. Также, в состоянии, когда транспортное перемещаемое тело 1 останавливается в положении P1 фиксированного останова стопором 19, чтобы размещаться в позиции готовности, так как положение P1 фиксированного останова находится в пределах области H с большим расстоянием, последующий толкатель 11 переднего по ходу приводного средства 7A может двигаться и проходить без каких-либо проблем верхнюю часть приводной каретки 5 в транспортном перемещаемом теле 1, которое остановлено в положении P1 фиксированного останова для размещения в позиции готовности.
[0019] Затем в состоянии, когда стопор 20 в положении P2 фиксированного останова начального оконечного участка заднего по ходу пути 16B перемещения продвигается вперед в положение действия, стопор 19 в положении P1 фиксированного останова выводится, приводной упор 12 возвращается в первоначальное предельное положение движения вверх, после этого стопорный толкатель 24 устройства 22 подачи перемещается блоком 23 цилиндра, перемещая вперед в предельное положение продвижения, расположение для толкания сзади транспортного перемещаемого тела 1, которое было остановлено в положении P1 фиксированного останова, таким образом, толкается стопорным толкателем 24 сзади, и транспортное перемещаемое тело 1 отправляется по направлению к начальному оконечному участку заднего по ходу пути 16B перемещения. В результате действия отправки транспортного перемещаемого тела 1 стопорным толкателем 24 устройства 22 подачи, как показано на Фиг. 3A и 3B, приводной упор 12 приводной каретки 5 в транспортном перемещаемом теле 1 отжимается вниз стопором 20 в положении P2 фиксированного останова, и стопорный упор 13 воспринимается стопором 20, в результате чего транспортное перемещаемое тело 1 автоматически останавливается в положении P2 фиксированного останова. В этот момент, передняя грузонесущая каретка 3a транспортного перемещаемого тела 1 останавливается непосредственно перед участком 21 пути с подъемом направляющего рельса 6. Отправка транспортного перемещаемого тела 1 в положение P2 фиксированного останова выполняется в момент времени, при котором может обеспечиваться достаточное время перед тем, как толкатель 11 заднего по ходу приводного средства 7B, дополнительно обеспечиваемого на заднем по ходу участке 16B перемещения, достигнет положения P2 фиксированного останова.
[0020] Как показано на Фиг. 3A и 3B, в состоянии, когда транспортное перемещаемое тело 1 остановлено в положении P2 фиксированного останова стопором 20 для размещения в позиции готовности, так как положение P2 фиксированного останова находится в пределах области H с большим расстоянием, толкатель 11 заднего по ходу приводного средства 7B может двигаться и проходить, без каких-либо проблем, мимо верхней части приводной каретки 5 в транспортном перемещаемом теле 1, который остановлен в положении P2 фиксированного останова для размещения в позиции готовности. Затем перед тем как толкатель 11, который приводит в движение транспортное перемещаемое тело 1, остановленное в позиции готовности в положении P2 фиксированного останова, чтобы перемещать транспортное перемещаемое тело 1, достигнет положения P2 фиксированного останова, стопор 20 в положении P2 фиксированного останова выводится, и, таким образом, приводной упор 12 возвращается в первоначальное предельное положение движения вверх. Следовательно, как показано на Фиг. 3C, толкатель 11 заднего по ходу приводного средства 7B, который движется по направлению к положению P2 фиксированного останова, соприкасается с приводным упором 12 приводной каретки 5, чтобы начать толкание сзади, и, таким образом, начинается приведение в движение транспортного перемещаемого тела 1, остановленного в положении P2 фиксированного останова.
[0021] Так как транспортное перемещаемое тело 1 перемещается по заднему по ходу пути 16B перемещения, приводная каретка 5, которая приводится в движение толканием сзади толкателем 11 заднего по ходу приводного средства 7B, перемещается из области H с большим расстоянием, где положение P2 фиксированного останова присутствует в области R со стандартным расстоянием, и, как показано на Фиг. 2C, в установившемся состоянии приведения в движение, когда толкатель 11 входит в зацепление между приводным упором 12 приводной каретки 5 и стопорным упором 13, приводится в движение транспортное перемещаемое тело 1.
[0022] Обычно, как описано выше, приведение в движение на переходе транспортного перемещаемого тела 1 с переднего по ходу пути 16A перемещения до заднего по ходу пути 16B перемещения выполняется автоматически, однако, существует случай, когда вышеописанное приведение в движение на переходе должно выполняться посредством ручной операции, когда вызывается ситуация, когда автоматическая операция не может быть выполнена по некоторой причине или из-за подтверждения операции и т.д. Для ручной операции в таком случае используется панель управления, которая является портативной и включает в себя сенсорную панель для операции касания, такая как устройство, которое обычно называется планшетом или блокнотным портативным персональным компьютером.
[0023] Последовательность операций в случае, когда вышеописанное приведение в движение на переходе транспортного перемещаемого тела 1 с переднего по ходу пути 16A перемещения на задний по ходу путь 16B перемещения выполняется посредством ручной операции на панели управления, показана на блок-схеме последовательности операций на Фиг. 4. В данном случае, этапы S2, S5, S8 и S11 выполняются посредством искусственной операции на сенсорной панели панели управления. Перед выполнением соответствующих этапов S2, S5, S8 и S11 выполнения, предшествующие этапы подтверждения, т.е. предшествующий этап S1 подтверждения для этапа S2 выполнения, предшествующие этапы S3 и S4 подтверждения для этапа S5 выполнения, предшествующие этапы S6 и S7 подтверждения для этапа S8 выполнения, предшествующие этапы S9 и S10 подтверждения для этапа S11 выполнения и этап S12 подтверждения для завершения управления приведением в движение на переходе выполняются искусственными действиями подтверждения.
[0024] Оператор, который выполняет приведение в движение на переходе транспортного перемещаемого тела 1 с переднего по ходу пути 16A перемещения на задний по ходу путь 16B перемещения посредством ручной операции, берет панель управления и переходит на место, где оператор может визуально определить зону перехода, т.е. зону перехода, включающую в себя область терминального оконечного участка переднего по ходу пути 16A перемещения и область начального оконечного участка заднего по ходу пути 16B перемещения. В данном случае, оператор подтверждает условия в соответствии с блок-схемой последовательности операций, показанной на Фиг. 4, и затем выполняет операцию на сенсорной панели панели управления на основе подтверждения. В качестве примера, отображение сенсорной панели панели управления, когда выполняются предшествующий этап S1 подтверждения и этап S2 выполнения, описывается с ссылкой на Фиг. 5. На сенсорной панели панели управления отображается окно W-1 (см. Фиг. 5A) для выполнения предшествующего этапа S1 подтверждения. В окне W-1 отображается пояснительное изображение 25 зоны перехода, сообщение 26 отображения предмета подтверждения и изображение 27 кнопки подтверждения, и оператор визуально определяет, с ссылкой на пояснительное изображение 25 зоны перехода и сообщение 26 отображения предмета подтверждения, что зона перехода находится в незанятом состоянии, и затем выполняет операцию касания на изображении 27 кнопки подтверждения. В результате, на сенсорной панели панели управления вместо окна W-1 отображается окно W-2 (см. Фиг. 5B).
[0025] В окне W-2 отображается пояснительное изображение 28 зоны перехода, включающее в себя стопоры A и B, соответствующие стопорам 19 и 20, обеспечиваемым в положениях P1 и P2 фиксированного останова, сообщение 29 отображения подробностей операции в момент продолжения, предупреждающее сообщение 30 перед продолжением, изображение 31 кнопки операции останова и изображение 32 кнопки операции смахивания перед продолжением. Поэтому, оператор может подтвердить подробности последующей операции после сообщения 29 отображения подробностей операции и также подтвердить предостережения из предупреждающего сообщения 30 перед продолжением, и, если оператор определяет из подробностей предупреждающего сообщения 30 перед продолжением, что будет иметь место затруднение, если операция будет выполняться как она есть, оператор может выполнить операцию касания на изображении 31 кнопки операции останова и, таким образом, прервать ручную операцию для управления приведением в движение на переходе. Если оператор определяет, что не будут иметь место проблемы, даже если операция будет выполняться как она есть, как показано в окне W-3 на Фиг. 5C, операция смахивания выполняется кончиком пальца на изображении 32 кнопки операции смахивания в указанном направлении. В результате, так как, как показано на этой же фигуре, в положении изображения 32 кнопки операции смахивания перед операцией смахивания появляется изображение 33 кнопки операции продолжения, посредством выполнения операции касания на изображении 33 кнопки операции продолжения, сигнал запуска для переключения стопоров 19 и 20 в положения действия беспроводным образом передается с панели управления на устройство управления для управления приведением в движение на переходе, и стопоры 19 и 20, таким образом, переключаются в положения действия.
[0026] Транспортное перемещаемое тело 1, которое было отправлено вышеописанной операцией в зону перехода на терминальном конце переднего по ходу пути 16A перемещения, автоматически останавливается в положении P1 фиксированного останова посредством стопора 19 в положении действия. Затем, как указано на блок-схеме последовательности операций, показанной на Фиг. 4, выполняются предшествующие этапы S3 и S4 подтверждения и этап S5 выполнения, и, в этот момент, на сенсорной панели панели управления, вместо окна W-3, показанного на Фиг. 5C, отображается окно W-4 (см. Фиг. 6A) для выполнения предшествующих этапов S3 и S4 подтверждения. В окне W-4 отображается пояснительное изображение 34 зоны перехода, включающее в себя стопоры A и B, соответствующие стопорам 19 и 20, транспортное перемещаемое тело и устройство подачи, сообщение 35 отображения предмета подтверждения и изображение 36 кнопки подтверждения, и оператор визуально определяет, с ссылкой на пояснительное изображение 34 зоны перехода, подробности предшествующих этапов S3 и S4 подтверждения, т.е. тот факт, что транспортное перемещаемое тело остановлено стопором A, и что толкатель Fp устройства подачи находится в предельном положении втягивания, и тогда выполняет операцию касания на изображении 36 кнопки подтверждения. В результате, на сенсорной панели панели управления вместо окна W-4 отображается окно W-5 (см. Фиг. 6B).
[0027] В окне W-5 отображается пояснительное окно 34 зоны перехода, сообщение 37 отображения подробностей операции в момент продолжения, предупреждающее сообщение 38 перед продолжением, изображение 39 кнопки операции останова и изображение 40 кнопки операции смахивания перед продолжением. Поэтому, оператор может подтвердить подробности последующей операции из сообщения 37 отображения подробностей операции и также подтвердить предостережения из предупреждающего сообщения 38 перед продолжением, и, если оператор определяет из подробностей предупреждающего сообщения 38 перед продолжением, что будет иметь место затруднение, когда операция будет выполняться в том виде, как она есть, оператор может выполнить операцию касания на изображении 39 кнопки операции останова и, таким образом, прервать ручную операцию управления приведением в движение на переходе. Если оператор определяет, что не произойдет никаких проблем, даже если операция будет выполняться в том виде, как она есть, как показано в окне W-6 на Фиг. 6C, операция смахивания выполняется кончиком пальца на изображении 40 кнопки операции смахивания в указанном направлении. В результате, так как, как показано на этой же фигуре, в положении изображения 40 кнопки операции смахивания перед операцией смахивания появляется изображение 41 кнопки операции продолжения, посредством выполнения операции касания на изображении 41 кнопки операции продолжения, сигнал запуска для втягивания стопора 19 из положения действия и переключения в положение без действия беспроводным образом передается с панели управления на устройство управления для управления приведением в движение на переходе, и стопор 19, таким образом, переключается в положение без действия.
[0028] После того как будет выполнен этап S5 выполнения, как показано на блок-схеме последовательности операций на Фиг. 4, последовательно выполняются предшествующие этапы S6 и S7 подтверждения и этап S8 выполнения, и предшествующие этапы S9 и S10 подтверждения и этап S11 выполнения. Хотя они не показаны, когда выполняются этапы S8 и S11 выполнения, в окне, отображаемом на сенсорной панели панели управления, как в окнах W-2 и W-3 и окнах W-5 и W-6, отображаемых на сенсорной панели панели управления, когда выполняются предыдущие этапы S2 и S5 выполнения, включены изображение кнопки операции останова, изображение кнопки операции смахивания перед продолжением и изображение кнопки операции продолжения, которое отображается только тогда, когда выполняется смахивание на изображении кнопки операции смахивания в заданном направлении.
[0029] Отмечается, что, хотя приводится в действие изображение (33, 41, …) кнопки операции продолжения, которое появляется, когда выполняется операция смахивания на изображении (32, 40, …) кнопки операции смахивания в заданном направлении, так что выполняется предполагаемая операция, предпочтительно применять конфигурацию, в которой, когда не выполняется операция касания на изображении кнопки продолжения в течение установленного времени после операции смахивания на изображении кнопки операции смахивания, изображение кнопки операции смахивания автоматически возвращается в первоначальное положение, так что скрывается изображение кнопки операции.
[0030] Кроме того, хотя обеспечивается изображение (31, 39, …) кнопки операции останова, которое отображается в окне, когда выполняется каждый этап выполнения, чтобы прервать и завершить управление переходом транспортного перемещаемого тела 1, как показано на Фиг. 7A и 7B, также возможно сконфигурировать так, что операция смахивания может выполняться на изображении (31, 39, …) кнопки операции останова в заданном направлении, когда операция смахивания выполняется на изображении (31, 39, …) кнопки операции останова в заданном направлении, изображение (33, 41, …) кнопки операции продолжения появляется в положении, в котором присутствовало изображение (31, 39, …) кнопки операции останова, и, таким образом, изображение (31, 39, …) кнопки операции останова также используется в качестве изображения (32, 40, …) кнопки операции смахивания. Кроме того, также является возможным сконфигурировать так, что, как показано на Фиг. 7C и 7D), окно (W-2, W-5, …), отображаемое само на сенсорной панели панели управления, может быть приведено в действие смахиванием в направлении отображаемой стрелки 42, когда выполняются этапы S2, S5, S8 и S11 выполнения, и, посредством выполнения операции смахивания в окне (W-2, W-5, …), появляется небольшое окно 43, включающее в себя изображение (33, 41, …) кнопки операции продолжения, которое было скрыто окном.
Промышленная применимость
[0031] Сенсорная панель для ручного управления механическим оборудованием согласно настоящему изобретению может применяться в случае, когда различные типы механического оборудования, которые в нормальном состоянии управляются автоматически, в частности, различные типы механического оборудования, которые принадлежат к области транспортировки материалов, приводятся в действие вручную в критической ситуации.
Список ссылочных позиций
[0032] 1 - транспортное перемещаемое тело
2 - основная часть тела
3a, 3b - грузонесущая каретка
4 - соединительная тяга
5 - приводная каретка
6 - направляющий рельс транспортного перемещаемого тела
7 - приводное средство
7A - переднее по ходу приводное средство
7B - заднее по ходу приводное средство
8 - направляющий рельс толкателя
10 - приводная цепь
11 - толкатель
12 - приводной упор
13 - стопорный упор
14 - приводимая в действие деталь
15 - приводящая в действие деталь
16A - передний по ходу путь перемещения
16B - задний по ходу путь перемещения
17, 18 - направляющая звездочка
19, 20 - стопор
21 - участок пути с подъемом
22 - устройство подачи
23 - блок цилиндра
24 - стопорный толкатель
25, 28, 34 - пояснительное изображение зоны перехода
26, 35 - сообщение отображения предмета подтверждения
27, 36 - изображение кнопки подтверждения
29, 37 - сообщение отображения подробностей операции
30, 38 - предупреждающее сообщение перед продолжением
31, 39 - изображение кнопки операции останова
32, 40 - изображение кнопки операции смахивания
33, 41 - изображение кнопки операции продолжения
42 - отображаемая стрелка
43 - небольшое окно
P1 - положение фиксированного останова на переднем по ходу пути перемещения
P2 - положение фиксированного останова на заднем по ходу пути перемещения
H - область с большим расстоянием
R - область со стандартным расстоянием
W-1 - W-6 – окно.
Реферат
Изобретение относится к вычислительной технике. Технический результат заключается в повышении точности ввода. Сенсорная панель, содержит экран управления для выполнения механическим оборудованием конкретной операции, обеспечиваемый на сенсорной панели, подвижный участок экрана, обеспечиваемый на экране управления, причем подвижный участок экрана перемещается по экрану управления посредством операции смахивания, и изображение кнопки операции отображается в том месте, с которого переместился подвижный участок экрана, и механическое оборудование выполняет конкретную операцию посредством выполнения операции касания на изображении кнопки операции после операции смахивания на подвижном участке экрана. 3 з.п. ф-лы, 19 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ и устройство для управления осветительным устройством в виртуальной комнате
Комментарии