Устройства и способы для удаления хрусталиковой ткани - RU2703694C2
Код документа: RU2703694C2
Чертежи










Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка испрашивает приоритет по предварительной заявке США № 62/051,396, поданной 17 сентября 2014 г., «METHOD AND DEVICE FOR LENS FRAGMENTATION USING FILAMENT CUTTING IN CATARACT SURGERY», и предварительной заявке США № 62/099,590, поданной 5 января 2015 г., «METHOD AND DEVICE FOR AB-INTERNO INTERVENTIONAL ENDOCAPSULAR FRAGMENTATION, RETRIEVAL AND EXTRACTION IN OPHTHALMIC SURGERY», которые включены в настоящую заявку путем отсылки в полном объеме во всех отношениях.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее изобретение относится, в общем, к хирургическим устройствам и, в частности, к экстракции хрусталиковой или другой ткани в офтальмологической хирургии.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[0003] Некоторые виды традиционной офтальмологической хирургии требуют измельчения хрусталиковой ткани и твердых внутриглазных объектов, например, интраокулярной линзы, на куски таким образом, чтобы ткань можно было экстрагировать из глаза. Экстракция хрусталиков для хирургической операции по удалению катаракты является одним из наиболее распространенных хирургических вмешательств на амбулаторных пациентах, выполняемых в количестве более 3 миллионов ежегодно только в Соединенных Штатах. Хрусталик находится внутри анатомической структуры, называемой капсульным мешком, который отделяет полость стекловидного тела от передней камеры (расположенной между капсульным мешком и роговицей). Допускать сообщение по текучей среде между полостью стекловидного тела и передней камерой нежелательно, поэтому в процессе экстракции хрусталика следят за тем, чтобы сохранять целостность задней поверхности капсульного мешка. Однако, капсульный мешок состоит из тонкой нежной ткани. В результате, врач должен быть особенно осторожным при удалении хрусталиковой ткани, чтобы избежать ненамеренного поражения капсульного мешка. Процедура дополнительно усложняется тем, что хрусталик обычно удаляют из передней поверхности капсульного мешка через, в общем, дуговой разрез. Процедура и разрез, получающийся в результате процедуры, называют капсулорексисом. Обычно капсулорексис не превышает 2,8-3 мм в диаметре. Обычно хирургическую операцию по удалению катаракты и другие хирургические операции, которые относятся к хрусталику, выполняют посредством образования небольшого разреза по краю роговицы для обеспечения доступа к передней камере и к передней поверхности капсульного мешка. Затем выполняют капсулорексис, и после этого данное отверстие можно использовать для хирургического доступа к хрусталику.
[0004] В процессе хирургической операции по удалению катаракты широко распространенным способом для экстракции хрусталика является факоэмульсификация, которая использует ультразвуковую энергию для измельчения хрусталика, после чего фрагменты хрусталика отсасываются. Другие способы фрагментации и экстракции хрусталика включали в себя применение медицинских инструментов, например, крючков или ножей, или инструменты для подведения энергии, например, лазеры, чтобы измельчать хрусталик на фрагменты и затем экстрагировать через разрез в роговице при подходе ab-interno.
[0005] Однако, существующие инструменты и методы не обеспечивают фрагментацию хрусталика на всю толщину. Упомянутые методы осуществляют подход к хрусталику с внешней поверхности глаза и поэтому рассекающие силы, прикладываемые медицинскими инструментами, ограничены настолько, что часто не достаточны для обеспечения фрагментации на всю толщину. Кроме того, вследствие хирургического доступа через разрез по краю роговицы, медицинский инструмент подается под углом, по существу параллельным плоскости, определяемой капсулорексисом. В результате, традиционные хирургические инструменты для удаления электродом-петлей, петлей или проволокой оказывается не в той ориентации, в которой устройство можно завести петлей вокруг хрусталика, чтобы обеспечить фрагментацию или экстракцию. Кроме того, даже если такой традиционный инструмент можно завести петлей вокруг хрусталика, на что упомянутый инструмент не способен, проволока электрода-петли будет создавать риск приложения чрезмерного усилия, повреждающего капсульный мешок, когда ее будут перемещать в рабочее положение. Инструменты для подведения энергии ограничены в части их способности вырезать части хрусталика, которые физически близко расположены к другим нежным анатомическим структурам, например, капсульному мешку. Например, лазер обычно не применяют для вырезания заднего края хрусталика, потому что он находится в непосредственной близости к заднему краю капсульного мешка, вследствие чего хрусталик остается не полностью фрагментированным и подлежит фрагментации с осторожным применением вспомогательных методов.
[0006] По приведенным причинам факоэмульсификация стала наиболее распространенным способом удаления хрусталика. Однако факоэмульсификация имеет собственные недостатки. По мере того, как жидкость и вещества всасывают из капсульного мешка и передней камеры, другие жидкости, например, физиологический раствор, нагнетают, чтобы поддерживать постоянный объем или постоянное давление. Поток жидкостей в глаз во время нагнетания и всасывания может создавать турбулентный поток, который может пагубно повлиять на ткань внутри глаза, например, на эндотелий роговицы. Ультразвуковая энергия, применяемая при факоэмульсификации, может оказывать собственное негативное воздействие на глазную ткань. Кроме того, факоэмульсификация требует дорогого и крупногабаритного капитального оборудования, что ограничивает места, в которых можно выполнять факоэмульсификацию.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Настоящее изобретение учитывает, что существующие методы для удаления хрусталиковой ткани обычно сложны и неэффективны. Кроме того, чтобы устранить риски повреждения капсульного мешка при использовании существующих методов, хрусталик измельчают или растворяют не полностью, вследствие чего оставляют один или более фрагментов с размерами больше, чем клинически желательно.
[0008] Поэтому, настоящее изобретение предлагает устройства и способы, которые эффективно измельчают хрусталик на мелкие фрагменты и собирают данные фрагменты. Данные устройства и способы, по желанию, дополняют или заменяют другие устройства или способы офтальмологической хирургии. Данные способы и поверхности сопряжения снижают риск повреждения глазной ткани, например, капсульного мешка, вырабатывают более эффективную практику хирургии.
[0009] В некоторых вариантах осуществления хирургическое устройство включает в себя стержень с просветом, образованным по его длине; и элемент, перемещаемый из положения хранения в развернутое положение, в котором больший участок элемента выдвигается из дистального конца просвета; при этом движение из положения хранения в развернутое положение вынуждает первую сторону элемента продвигаться дистально относительно дистально конца стержня и вынуждает вторую сторону элемента перемещаться проксимально относительно дистального конца стержня.
[0010] В некоторых вариантах осуществления устройство для проведения хирургической операции на человеческом глазе (который включает в себя капсульный мешок, хрусталик внутри капсульного мешка и роговицу) включает в себя трубку с просветом, образованным по ее длине; и рассекающий элемент, выполненный с возможностью изменения между, по меньшей мере, первой формой и второй формой, при этом вторая форма имеет периметр, и рассекающий элемент выдвигается из дистального конца просвета; причем первая форма установлена по размеру с возможностью введения через капсулорексис на передней поверхности капсульного мешка, и диаметр капсулорексиса меньше, чем диаметр хрусталика; причем рассекающий элемент допускает перемещение из первой формы во вторую форму для перемещения между хрусталиком и капсульным мешком таким образом, что, когда рассекающий элемент имеет вторую форму, рассекающий элемент заключает в себе, по меньшей мере, участок хрусталика внутри своего периметра; и причем рассекающий элемент допускает перемещение в третью форму из второй формы для приложения разрезающего усилия к хрусталику.
[0011] В некоторых вариантах осуществления устройство для офтальмологической хирургии включает в себя стержень с просветом, образованным по ее длине; внутренний поворотный элемент, расположенный, по меньшей мере, частично в просвете; внешний поворотный элемент, расположенный, по меньшей мере, частично в просвете и расположенный радиально между внутренним поворотным элементом и стержнем; первое множество лент, продолжающихся в дистальном направлении из дистального конца внешнего поворотного элемента, при этом каждая из первого множества лент отстоит по окружности одна от другой; второе множество лент, продолжающихся в дистальном направлении из дистального конца внутреннего поворотного элемента, причем каждая из второго множества лент отстоит по окружности одна от другой; и концевую часть, соединенную с дистальным концом каждой из лент; причем первое множество лент и второе множество лент допускают перемещение из сомкнутого положения в раскрытое положение; и причем, по меньшей мере, одна из первого множества лент и второго множества лент допускает поворот относительно другой в раскрытом положении.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0012] Фиг. 1 - схематический вид сбоку анатомического строения глаза, с изображением введения стержня и рассекающего элемента через разрез в боковой стороне роговицы.
[0013] Фиг. 2 - вид сверху рассекающего элемента в развернутом рабочем положении.
[0014] Фиг. 3 - вид в перспективе капсульного мешка, с выполненным капсулорексисом, с рассекающим элементом в первой конфигурации введения.
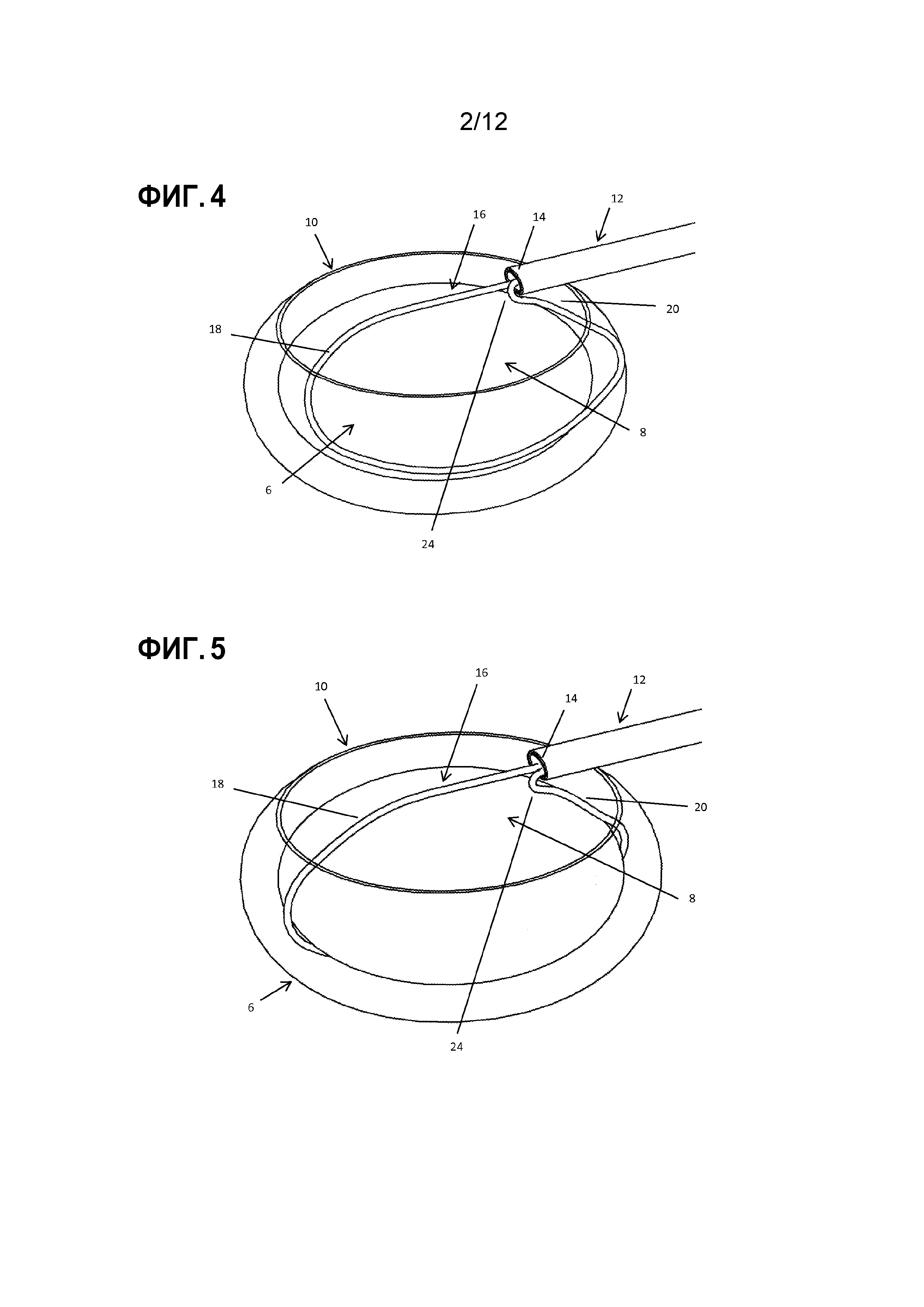
[0015] Фиг. 4 - вид в перспективе капсульного мешка, с выполненным капсулорексисом, с рассекающим элементом во второй конфигурации захвата.
[0016] Фиг. 5 - вид в перспективе капсульного мешка, с выполненным капсулорексисом, с рассекающим элементом в третьем положении фрагментации.
[0017] Фиг. 6 - вид в перспективе хрусталика, показанного на фиг. 5, с рассекающим элементом, не показанным для ясности.
[0018] Фиг. 7 - вид в перспективе хрусталика, показанного на фиг. 5, с рассекающим элементом и капсульным мешком, не показанными для ясности.
[0019] Фиг. 8 - вид в перспективе хирургического устройства, включающего в себя ручку, стержень и несколько рассекающих элементов.
[0020] Фиг. 9 - вид в перспективе хирургического устройства, показанного на фиг. 8, с рассекающими элементами в первой конфигурации введения.
[0021] Фиг. 10 - вид в перспективе хирургического устройства, показанного на фиг. 8, с левым движком, выдвинутым для расширения левого рассекающего элемента к второй конфигурации захвата.
[0022] Фиг. 11 - вид в перспективе хирургического устройства, показанного на фиг. 8, с левым движком, полностью выдвинутым для расширения левого рассекающего элемента во вторую конфигурацию захвата.
[0023] Фиг. 12 - вид в перспективе хирургического устройства, показанного на фиг. 8, с правым движком, выдвинутым для расширения правого рассекающего элемента ко второй конфигурации захвата.
[0024] Фиг. 13 - вид в перспективе хирургического устройства, показанного на фиг. 8, с правым движком, полностью выдвинутым для расширения правого рассекающего элемента во вторую конфигурацию захвата.
[0025] Фиг. 14 - вид в перспективе того, что показано на фиг. 13, с представлением положения рассекающих элементов относительно хрусталика.
[0026] Фиг. 15 - увеличенный вид в перспективе дистального конца хирургического устройства, показанного на фиг. 8.
[0027] Фиг. 16 - вид в перспективе с вырезом ручки с правым движком в его исходном положении.
[0028] Фиг. 17 - увеличенный вид в перспективе части ручки, показанной на фиг. 16.
[0029] Фиг. 18 - увеличенный вид в перспективе другой части ручки, показанной на фиг. 16.
[0030] Фиг. 19 - увеличенный вид в перспективе ручки, показанной на фиг. 16-18, с частично выдвинутым правым движком.
[0031] Фиг. 20 - увеличенный вид в перспективе ручки, показанной на фиг. 16-18, с правым движком, выдвинутым дистально дальше, чем в положении на фиг. 19.
[0032] Фиг. 21 - увеличенный вид в перспективе ручки, показанной на фиг. 16-18, с правым движком, возвращаемым к его исходному положению.
[0033] Фиг. 22 - увеличенный вид в перспективе ручки, показанной на фиг. 16-18, с правым движком, возвращенным в его исходное положение.
[0034] Фиг. 23 - вид сбоку другого варианта осуществления двух рассекающих элементов, выдвигающихся из стержня для охвата хрусталика.
[0035] Фиг. 24 - вид верху другого варианта осуществления двух рассекающих элементов, выдвигающихся из стержня для охвата хрусталика, и удерживающего мешка.
[0036] Фиг. 25 - вид в перспективе дистального конца другого варианта осуществления хирургического инструмента в первой конфигурации введения.
[0037] Фиг. 26 - вид в перспективе дистального конца хирургического инструмента, показанного на фиг. 25, во второй, расширенной конфигурации.
[0038] Фиг. 27 - вид в перспективе дистального конца хирургического инструмента, показанного на фиг. 25, во второй, расширенной конфигурации, охватывающей фрагмент хрусталика.
[0039] Фиг. 28 - вид в перспективе дистального конца хирургического инструмента, показанного на фиг. 25, в третьей, каркасной конфигурации.
[0040] Фиг. 98 - вид в перспективе дистального конца хирургического инструмента, показанного на фиг. 25, в четвертой конфигурации удаления.
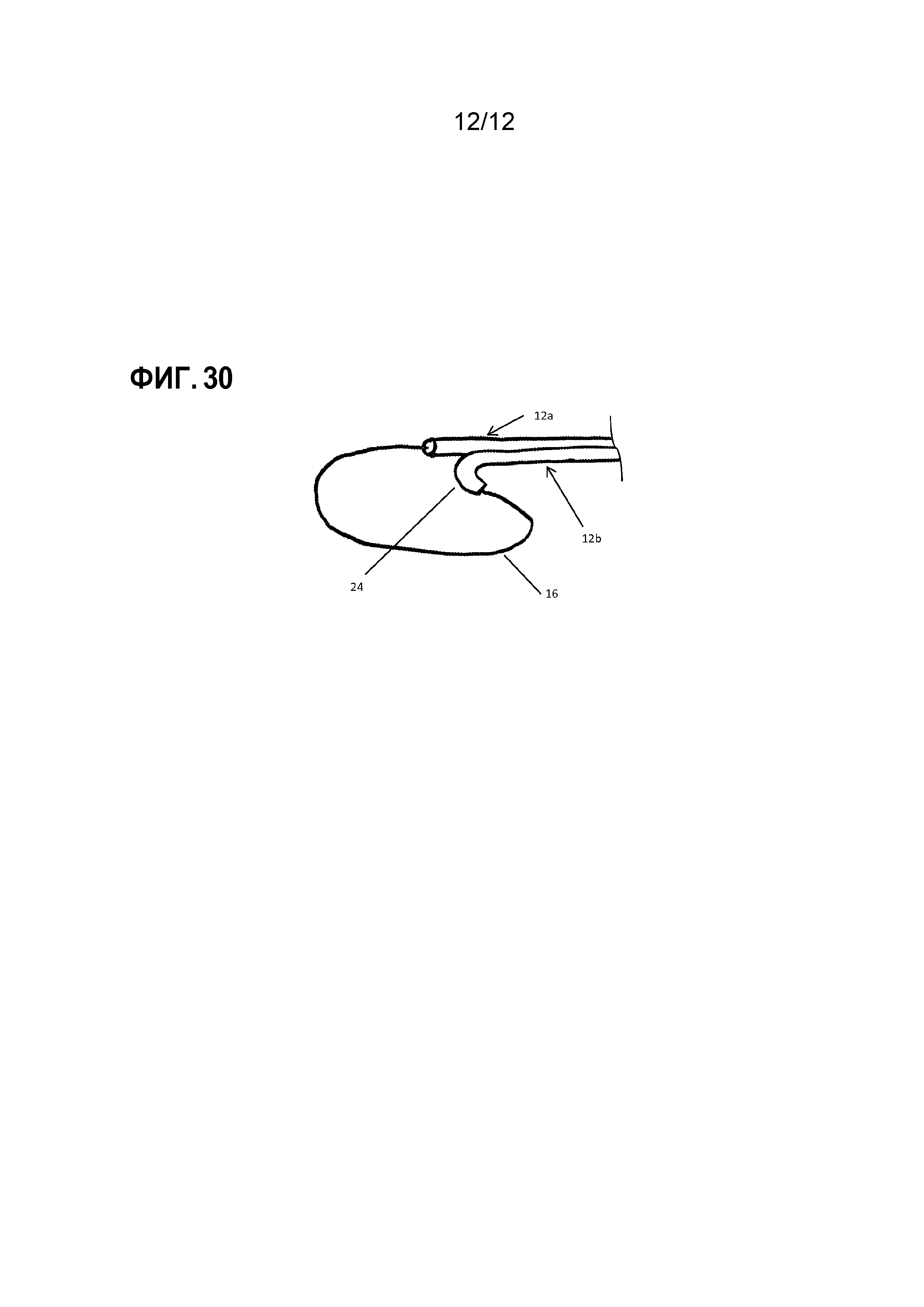
[0041] Фиг. 30 - вид сбоку альтернативного варианта осуществления хирургического инструмента.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0042] Как показано на фиг. 1, нормальное анатомическое строение глаза 1 включает в себя роговицу 2, капсульный мешок 6 и хрусталик 8 внутри капсульного мешка 6. Разрез 4 делают в краю роговицы 2, и хирург выполняет процедуру капсулорексиса на капсульном мешке 6, в результате чего получают капсулорексис 10 в передней поверхности капсульного мешка 6. Капсулорексис 10 можно выполнять любым подходящим образом, например, разрезанием скальпелем, подведением энергии с помощью фемтосекундного лазера или другим энергетическим разрезающим устройством, разрезанием с роботизированным или автоматизированным управлением или любым другим подходящим образом. Капсулорексис 10 может быть вырван или вырезан с диаметром приблизительно от 2,0 мм до 8,0 мм. В соответствии с другими вариантами осуществления, капсулорексис 10 можно делать с диаметром меньше 2,0 мм, в частности, когда фрагменты хрусталика 8 (как подробно описано ниже) имеют достаточно мелкие размеры для экстракции через капсулорексис 10 меньшего диаметра. Капсулорексис 10 можно делать с помощью отдельного набора инструментов, например, микроножниц, как обычно и делается. В качестве альтернативы, в хирургическое устройство 40, описанное в настоящей заявке, можно включать функциональные возможности и инструменты чтобы облегчать или полностью выполнять капсулорексис. Например, микроножницы могут быть присоединены к дистальному концу стержня 12 с таким расчетом, чтобы инструмент 40 мог выполнять капсулорексис. В других примерах, что-то одно или более из лезвия, кератома, крючка, лазера, абляционного энергетического облучателя или чего-то подобного может быть встроено в дистальный конец стержня 12 или соединяться с данным концом, для использования во время хирургической операции. Например, к стержню 12 можно присоединить выдвижную концевую часть и использовать для поворота хрусталика 8 между этапами фрагментации, как описано в настоящей заявке. Выдвижная концевая часть может быть остроконечной концевой частью, которую можно втыкать в хрусталик 8 таким образом, чтобы пользователь мог повернуть хрусталик 8 в новую ориентацию и рассекать хрусталик 8 под другим углом. В соответствии с некоторыми вариантами осуществления, любую отдельные инструменты, применяемые хирургом для выполнения капсулорексиса, выводятся из разреза 4 в роговице 2. Как также показано на фиг. 3, затем через разрез 3 в роговице 2 вводят стержень 12. Как видно на фиг. 3, дистальный конец стержня 12 расположен выше (т.е. спереди относительно) капсулорексиса 10, отстоит на некоторое расстояние от капсулорексиса 10, но расположен внутри окружности капсулорексиса 10, при наблюдении снаружи глаза 1. Как видно на фиг. 1, стержень 12 обычно параллелен плоскости, определяемой краями капсулорексиса 10, после введения стержня через разрез 3 в роговице 2. В некоторых вариантах осуществления дистальный конец рассекающего элемента 16 выдвигается из дистального конца стержня 12 в первой конфигурации введения. В таких вариантах осуществления изгиб 24 малого радиуса может находиться снаружи стержня 12, уже изогнутый, по меньшей мере, частично в проксимальном направлении. При этом, даже в вариантах осуществления, в которых рассекающий элемент 16 изготовлен из сверхупругого материала, угол, на который изгибается вторая сторона 20 рассекающего элемента 16 во время перехода из первой конфигурации введения во вторую конфигурацию захвата, уменьшается. Кроме того, внутри просвета 14 стержня 12 требуется меньше пространства для удерживания части рассекающего элемента 16, чем для удерживания его целиком, что позволяет изготавливать стержень 12 с меньшим диаметром. Стержень 12 включает в себя просвет 14, образованный по всей длине стержня. В соответствии с некоторыми вариантами осуществлениями, стержень 12 является трубкой с овальным поперечным сечением, с закругленной концевой частью. Овальное поперечное сечение совершенствует способность стержня 12 к введению в глаз 1 через роговичный разрез 4. Кроме того, в случае, если имеется несколько рассекающих элементов, их можно легче располагать бок о бок в просвете 14 стержня 12 с овальным поперечным сечением. В качестве альтернативы, стержень 12 может иметь круглое поперечное сечение или поперечное сечение любой другой подходящей формы. Проксимальный конец рассекающего элемента 16 продолжается по просвету 14 стержня 12. В качестве альтернативы, весь рассекающий элемент 16 расположен внутри просвета 14 стержня 12 в первой конфигурации введения. В качестве альтернативы, применяют больше одного рассекающего элемента 16, при этом каждый рассекающий элемент 16 находится исходно в первой конфигурации введения. Хотя применительно к данному конкретному варианту осуществления описан для ясности единственный рассекающий элемент 16, в свете дальнейшего нижеприведенного раскрытия будет очевидно, что в ходе одной процедуры удаления хрусталика можно обеспечивать и использовать любое подходящее число рассекающих элементов 16, и что устройства и способы по настоящему изобретению не ограничены использованием какого-либо конкретного числа элементов 16.
[0043] В соответствии с некоторыми вариантами осуществления, рассекающий элемент 16 включает в себя первый конец 18 и второй конец 20. Как подробно описано ниже со ссылкой на фиг. 16-22, один из концов 18, 20 рассекающего элемента 16 может быть перемещаемым относительно стержня 12, а другой из концов 18, 20 рассекающего элемента 16 может быть зафиксирован относительно стержня 12. Например, второй конец 20 рассекающего элемента 16 может быть зафиксирован относительно стержня 12, и первый конец 18 рассекающего элемента 16 может быть передвижным относительно стержня 12. Второй конец 20 может быть соединен со стержнем 12 или другой конструкцией посредством обжима, сварки, адгезивов, механических фиксаторов или любой(ого) другой(ого) подходящей(его) конструкции или способа. В некоторых вариантах осуществления рассекающий элемент 16 является проволокой с круглым, овальным или другим атравматическим поперечным сечением. В других вариантах осуществления рассекающий элемент 16 является лентой. В контексте настоящего документа лента является конструкцией, которая имеет ширину больше ее толщины, при наблюдении в продольном направлении.
[0044] В первой конфигурации введения, в которой дистальный конец рассекающего элемента 16 продолжается дистально из стержня 12, рассекающий элемент 16 выполнен по размеру и по форме с возможностью прохода через стандартный роговичный разрез 4 без повреждения глаза 1. Роговичный разрез 4 обычно не превышает 3,5 мм по ширине и выполнен небольшим хирургическим ножом. Таким образом, внешний диаметр стержня 12 предпочтительно не превышает 3,5 мм. В случае, если используют разрез 4 другого размера, можно использовать отличающийся внешний диаметр стержня 12 с учетом, что желательнее всего формировать разрез 4 в виде линии в длину не более 5 мм. В других вариантах осуществления рассекающий элемент 16 находится целиком внутри просвета 14 стержня 12 таким образом, что рассекающий элемент находится в пределах внутреннего диаметра стержня 12, когда стержень 12 вводят через разрез 4, и затем выдвигается из стержня 12, после того, как оказывается в глазу. В качестве альтернативы, можно применить дополнительные компоненты для заключения в них рассекающего элемента 16 в процессе введения через роговичный разрез 4. Например, на дистальном конце стержня 12 может быть установлена конусная деталь, которая постепенно сужается от конца стержня 12 к меньшему поперечному сечению с таким расчетом, чтобы облегчать введение через роговичный разрез 4. Конусная деталь может также покрывать рассекающий элемент 16, чтобы сжимать его в процессе введения. Конусная деталь может дополнительно содержать прорезь спереди, через которую рассекающий элемент 16 может выдвигаться или вскрываться после того, как рассекающий элемент прошел через разрез 4.
[0045] В соответствии с некоторыми вариантами осуществления, рассекающий элемент 16 изготовлен из гибкого или сверхупругого материала, например, никелево-титанового сплава, который дает рассекающему элементу 16 возможность изгибаться и упруго деформироваться по мере того, как его вводят в глаз 1 через роговичный разрез 4. В данных вариантах осуществления сжатая форма рассекающего элемента 16 может быть больше в одном или более измерениях, чем роговичный разрез 4, и упруго деформируется для прохода через разрез 4, когда стержень 12 перемещается к капсулорексису 10. В качестве альтернативы, рассекающий элемент 16 может не иметь первой конфигурации введения и может быть введен через разрез 4 в той же конфигурации, которая впоследствии используется для захвата хрусталика 8. В таких вариантах осуществления рассекающий элемент 16 сжимается, когда он проходит через роговичный разрез 4 и затем повторно расширяется после того, как входит в глаз 1. В некоторых других вариантах осуществления рассекающий элемент 16 может не иметь первой конфигурации введения и может быть введен через разрез 4 в конфигурации большего размера, которая впоследствии используется для захвата хрусталика 8. В некоторых других вариантах осуществления рассекающий элемент 16 можно изгибать крючком, поворачивать или иначе вводить через роговичный разрез 4 любыми возможными способами.
[0046] Как показано на фиг. 4, рассекающий элемент 16 или рассекающие элементы выталкивают дистально относительно просвета 14 стержня 12. Как изложено выше, одна сторона 20 рассекающего элемента 16 может быть зафиксирована так, что другая сторона 18 рассекающего элемента 16 выталкивается дистально относительно просвета 14 стержня 12. В результате, рассекающий элемент перемещается из первой конфигурации введения во вторую конфигурацию захвата.
[0047] Рассекающий элемент 16 может быть изготовлен из любого подходящего материала. Например, как изложено выше, можно воспользоваться материалами с памятью формы, например, никелево-титановым сплавом, чтобы дать рассекающему элементу 16 возможность перемещаться в его предварительно заданную форму во второй конфигурации захвата с высокой степенью упругости. В одном варианте осуществления никелево-титановый сплав можно использовать в его сверхупругом состоянии, в котором никелево-титановый сплав трансформирует свою кристаллическую структуру для перемещения из первой конфигурации введения во вторую конфигурацию захвата. В других вариантах осуществления рассекающий элемент 16 изготовлен из никелево-титанового сплава, форма которого задана для перемещения из первой конфигурации введения во вторую конфигурацию захвата при достижении температуры фазового перехода, которая выше комнатной температуры, но ниже температуры тела. Следовательно, рассекающий элемент 16, изготовленный из никелево-титанового сплава, может входить в глаз при комнатной температуре ниже его температуры фазового перехода таким образом, что он будет удерживать сжатую форму. Когда рассекающий элемент 16 размещают в глазу 1 и дают время нагреться до температуры тела, никелево-титановый сплав может нагреться до температуры выше его температуры фазового перехода и начать возвращаться в его предварительно заданную вторую конфигурацию захвата. Данное изменение формы может происходить в течение периода времени, который дает врачу возможность поместить рассекающий элемент в капсульный мешок 6 и ориентировать его в то время, когда форма изменяется, таким образом, чтобы петля могла задать плоскость сечения хрусталика. В некоторых вариантах осуществления никелево-титановый сплав. В качестве альтернативы можно учитывать возможность применения множества других биосовместимых материалов, например, нержавеющей стали, которые можно активно нагревать хирургическим устройством 40, при этом температуру фазового перехода рассекающего элемента 16 можно выбрать выше комнатной температуры, но ниже температуры, которая повредит ткань капсульного мешка 6 или другую ткань глаза 1. Вместо никелево-титанового сплава можно использовать другие материалы с памятью формы, например, пластики с памятью формы. В качестве альтернативы можно учитывать возможность применения множества других биосовместимых материалов, например, нержавеющей стали, титана, силикона, полиимида, полиэфирблокамида марки PEBAX®, нейлона, поликарбоната или любого другого подходящего материала. Кроме того, можно использовать несколько материалов, соединенных конец к концу, или в ламинированных слоях или концентрических трубках материала.
[0048] Как показано также на фиг. 1 и 4, во второй конфигурации захвата рассекающий элемент 16 принимает форму специально для захвата хрусталика. В соответствии с некоторыми вариантами осуществления, вторая конфигурация захвата имеет предварительно установленную форму рассекающего элемента 16, например, за счет применения упругих или сверхупругих материалов для изготовления рассекающего элемента.
[0049] Как наиболее четко видно на фиг. 4, во второй конфигурации захвата рассекающий элемент 16 приблизительно соответствует неравномерно изогнутой петле, которая обычно принимает форму, подобную сечению хрусталика 8, и которая имеет форму и размер для охвата хрусталика 8 внутри капсульного мешка 6. Как изложено выше, в некоторых вариантах осуществления рассекающий элемент 16 изготовлен из куска круглой проволоки. Вторая конфигурация захвата рассекающего элемента 16 имеет точку 22 соединения, в которой первая сторона 18 и вторая сторона 20 рассекающего элемента 16 соединяются с формирование формы с периметром, который приблизительно соответствует замкнутой петле. «Соединение» означает размещение первой стороны 18 и второй стороны 20 рассекающего элемента 16 в непосредственной близости друг к другу. Точка 22 соединения может располагаться на или в непосредственной близости к дистальному концу стержня 12. Во второй конфигурации захвата рассекающий элемент включает в себя дистальный участок 28, который продолжается дистально относительно точки 22 соединения, и проксимальный участок 26, который продолжается проксимально относительно точки 22 соединения. Точка 22 соединения в данном примерном варианте осуществления находится в точке над поверхностью хрусталика и внутри круга, образованного капсулорексисом 10 в верхней части капсульного мешка 6. В некоторых вариантах осуществления проксимальный участок 26 рассекающего элемента 16 может включать в себя изгиб 24 малого радиуса, как показано на фиг. 1. Изгиб 24 малого радиуса изгибает вторую сторону 20 рассекающего элемента 16 в проксимальном направлении таким образом, что вторая сторона 20 продолжается проксимально от точки 22 соединения. В качестве альтернативы, рассекающий элемент 16 может проходить по другой траектории, чтобы обеспечивать переход данной траектории без упомянутого изгиба малого радиуса. Например, можно использовать траектории, которые находятся снаружи нормальной плоскости, показанной на фиг. 1, например, искривления или отклонения, чтобы уменьшить общий радиус изгиба проксимального участка 26 рассекающего элемента 16. Такой подход может расширить способность рассекающего элемента 16 к изменению формы до других сжатых конфигураций меньших размеров, как поясняется ниже.
[0050] Первая сторона 18 и/или вторая сторона 20 выталкиваются из просвета 14 стержня 12 в то время, как другая сторона зафиксирована относительно стержня, как описано выше. В качестве альтернативы, обе стороны 18, 20 рассекающего элемента 16 являются перемещаемыми относительно стержня 12 и выполнены с возможностью сдвига относительно просвета 14 стержня 12. В качестве альтернативы, стержень 12 может быть сдвигающимся компонентом, а рассекающий элемент 16 остается стационарным. Когда сторона или стороны 18, 20 выталкиваются наружу из просвета 14, рассекающий элемент 16 переходит во вторую конфигурацию захвата. Когда рассекающий элемент 16 совершает переход, изгиб 24 малого радиуса позволяет проксимальному участку рассекающего элемента продолжаться от дистального конца стержня 12 в местоположении, отстоящем от продольной осевой линии просвета стержня 12, и в одну сторону данной линии, в направлении к капсульному мешку 6. Таким образом, рассекающий элемент 16 способен выдвигаться вниз через капсулорексис 10 и расширяться внутри капсульного мешка 6 до длины, которая больше, чем диаметр капсулорексиса 10, как видно на фиг. 1. В соответствии с некоторыми вариантами осуществления, изгиб 24 малого радиуса дает, в результате, вторую сторону 20, имеющую угол, по меньшей мере, 120 градусов относительно продольной осевой линии стержня 12 и относительно дистального направления, как видно на фиг. 1. Как дистальный участок 28, так и проксимальный участок рассекающего элемента 16 во второй конфигурации захвата слегка искривлены и обычно приблизительно соответствуют размеру и форме боковых сторон капсульного мешка 6, чтобы входить в капсульный мешок 6, не причиняя повреждения (например, разрыва капсулы или отверстия в ней, чрезмерного натяжения капсульного мешка или повреждения внутренней поверхности ткани капсульного мешка).
[0051] Как также показано на фиг. 2, форма рассекающего элемента 16 во второй конфигурации захвата формирует плоскость, которая обычно является ровной или горизонтальной относительно верхней поверхности хрусталика, в соответствии с некоторыми вариантами осуществления. Как показано на фиг. 1 и 3, в правильной ориентации, рассекающий элемент 16 удерживают так, чтобы он раскрывался через капсулорексис 10 в капсульный мешок 6. По мере того, как рассекающий элемент 16 продолжает расширяться, плоскость, сформированную рассекающим элементом 16, можно поворачивать так, чтобы рассекающий элемент пересекал пространство между капсульным мешком и хрусталиком. Плоскость включает в себя продольную ось просвета 14 стержня 12. В качестве альтернативы, форма рассекающего элемента 16 во второй конфигурации захвата является больше трехмерной формой, которая не лежит в одной плоскости. Например, рассекающий элемент 16 может отклоняться в и из ровной плоскости или может, по существу, искривляться из ровной плоскости в одном или другом направлении. Поворот может осуществляться поворотом стержня 12 или хирургического устройства 40 вручную пользователем или может осуществляться механизмами, сопряженными с хирургическим устройством 40, как подробно описано ниже. Как также показано на фиг. 4, рассекающий элемент 16 проследовал большую часть пути из первой конфигурации введения во вторую конфигурацию захвата и был частично повернут относительно хрусталика 8. Рассекающий элемент 16 можно поворачивать так, чтобы плоскость формы находилась, в основном, вертикально или под немалым числом других углов. Механизмы и способы для выполнения такого поворота подробно описаны ниже. Кроме того, можно применить несколько рассекающих элементов 16, которые поворачиваются на множество различных углов. В других вариантах осуществления поворот не происходит, пока рассекающий элемент 16 не переходит во вторую конфигурацию захвата. В соответствии с некоторыми вариантами осуществления, поворот начинается в то время, когда рассекающий элемент 16 переходит во вторую конфигурацию захвата. Например, поворот может начинаться после того, как раскрытая зона 46 внутри рассекающего элемента 16 расширяется до размера, при котором через раскрытую зону 46 между двумя точками на проксимальном участке 26 и дистальном участке 28 продолжается 5-6-мм хорда. В другом примере поворот может начинаться, когда хорда длиннее или короче, чем 5-6 мм.
[0052] Вторая конфигурация захвата рассекающего элемента 16 может быть, в общем, овальной по форме, как показано на фиг. 1, с шириной 7,0-15,0 мм и высотой 3,0-10,0 мм, в соответствии с некоторыми вариантами осуществления. В соответствии с другими вариантами осуществления, ширина рассекающего элемента 16 может составлять 4,0-20,0 мм, при высоте 1,0-15,0 мм. В некоторых вариантах осуществления размер второй конфигурации захвата рассекающего элемента 16 может быть преднамеренно меньше, чем размер хрусталика в некоторых зонах или вдоль всего профиля. Данный размер может усовершенствовать способность рассекающего элемента 16 к нахождению ближе к хрусталику 8 и уменьшить взаимное воздействие с капсульным мешком 6. Например, вторая конфигурация захвата рассекающего элемента 16 может иметь ширину 12,0 мм и высоту 4,0 мм. Это может предусматривать зазор между рассекающим элементом 16 и хрусталиком 8 на ширине овала, при сохранении контакта по высоте овала, что может снижать вероятность повреждения задней поверхности капсульного мешка 6. То есть, посредством формирования второй конфигурации захвата рассекающего элемента 16 с возможностью обхвата участка хрусталика 8, вместо перемещения в положение, в котором рассекающий элемент охватывает наиболее толстую часть хрусталика 8, рассекающий элемент 16 выполняется с меньшими размерами и обхватывает меньшую часть капсульного мешка 6, чем конфигурация, в которой вторая конфигурация захвата рассекающего элемента 16 способна охватывать наиболее толстую часть хрусталика 8. В других вариантах осуществления вторая конфигурация захвата рассекающего элемента 16 предварительно задана для получения обычно конкретного зазора вокруг хрусталика 8. В соответствии с некоторыми вариантами осуществления, вторая конфигурация захвата рассекающего элемента 16 имеет форму, отличающуюся от овала.
[0053] Рассекающий элемент 16 может иметь функциональные возможности или геометрию, которые дополнительно предотвращают повреждение капсульного мешка элементом. Например, рассекающий элемент 16 является круглой проволокой достаточного диаметра для снижения вероятности разрыва или повреждения капсульного мешка 6, в соответствии с некоторыми вариантами осуществления. Диаметр данной круглой проволоки может быть 0,004-0,012 дюйма (0,1-0,3 мм), но может быть также любого другого размера, который предотвращает воздействие чрезмерным напряжением на капсульный мешок 6, например, 0,001-0,030 дюйма (0,026-0,77 мм) в диаметре. В качестве альтернативы, профиль рассекающего элемента 16 может быть овальным, с большей шириной или высотой, или может быть лентой, чтобы дополнительно распределять усилие воздействия рассекающего элемента 16 на капсульный мешок 6 по большей площади поверхности, что уменьшает или исключает зоны высокого давления, оказываемого на капсульный мешок 6 рассекающим элементом.
[0054] В некоторых вариантах осуществления участки внешней поверхности рассекающего элемента 16 могут быть с покрытием для совершенствования некоторых аспектов устройства. Например, как подробно описано ниже, рассекающий элемент 16 пересекает пространство между капсульным мешком 6 и хрусталиком 8. Когда рассекающий элемент 16 перемещается между данными анатомическими структурами, возможно, было бы целесообразно наличие более гидрофильной или гидрофобной поверхности, чтобы рассекающий элемент 16 поворачивался и перемещался свободнее. В одном варианте осуществления рассекающий элемент 16 может быть с покрытием из такого гидрофобного материала, как фторполимер; например, ПТФЭ (политетрафторэтилен). Покрытие можно наносить методом нанесения покрытия окунанием, по технологии плазменного осаждения из паровой фазы, методом покрытия термоусадочной оболочкой или любым другим подходящим способом. Покрытие может ослаблять трение между рассекающим элементом 16 и хрусталиком 8 и/или капсульным мешком 6, чтобы допускать более свободное перемещение рассекающего элемента 16. Другие способы ослабления трения могут включать в себя использование механической обработки абразивом, плазменной обработки или любого другого подходящего способа. В качестве альтернативы, на рассекающий элемент 16 может быть нанесено покрытие из других материалов, например, активных фармацевтических средств, которые выполнены с возможностью высвобождения в глаз во время процедуры. Например, в поверхность рассекающего элемента 16 можно вносить стероидный триамцинолон с таким расчетом, чтобы во время процедуры он высвобождался в глаз. Предполагается возможным применение любого числа других покрытий и лекарств.
[0055] Рассекающий элемент 16 может быть изготовлен с использованием любых других подходящих геометрий или материалов. В примерном варианте осуществления рассекающий элемент 16 является круглой проволокой. Проволока выполнена с возможностью прямого пересечения пространства между хрусталиком 8 и капсульным мешком 6. Проволока может иметь различные размеры или диаметры по длине рассекающего элемента 16. В качестве альтернативы, рассекающий элемент 16 может иметь любое число других профилей. Например, рассекающий элемент 16 может быть трубкой, полоской, лентой, проволокой с шестигранным профилем или любым другим числом подходящих форм. Кроме того, профиль рассекающего элемента 16 может изменяться по его длине. Например, рассекающий элемент 16 может включать в себя одну или более мягких зон вдоль его профиля, где повреждение капсульного мешка 4 вызывает особую озабоченность. Мягкие зоны могут включать в себя разные материалы, например, но без ограничения, мягкие эластомерные материалы, подобные силикону, которые приклеены или нанесены на соответствующие зоны рассекающего элемента 16. Мягкие зоны могут распределять усилие по большей площади и обеспечивать более мягкую и более атравматическую поверхность сопряжения с капсульным мешком 6. В других вариантах осуществления мягкие зоны являются изменениями геометрического профиля рассекающего элемента в некоторых зонах. Например, зоны, которые являются выровненными или расширенными, даже если они состоят из того же самого материала, распределяют усилие по большей площади. Кроме того, жесткость или гибкость рассекающего элемента может изменяться по длине рассекающего элемента 16 благодаря изменению толщины материала или диаметра проволоки в некоторых зонах. В качестве альтернативы, к рассекающему элементу 16 могут быть добавлены гильзы или другие материалы для локального повышения жесткости в некоторых зонах. В некоторых других вариантах осуществления рассекающий элемент 16 может иметь надрезы или ребра по его длине, которые изменяют гибкость или жесткость рассекающего элемента в некоторых зонах.
[0056] В других вариантах осуществления форма рассекающего элемента 16 во второй конфигурации захвата не является предварительно заданной. Вместо этого форма рассекающего элемента 16 во второй конфигурации захвата определяется свойствами материала или геометрическими свойствами рассекающего элемента 16, зацепляющегося с хрусталиком 8. Рассекающий элемент 16 может быть достаточно гибким, упругим, мягким или округленным по его длине, при сохранении достаточной жесткости, чтобы допускать поворот для обхвата хрусталика 8, так что к капсульному мешку 6 прикладывается минимальное усилие, даже когда рассекающий элемент 16 находится внутри капсульного мешка 4 и полностью раскрыт. В других вариантах осуществления рассекающий элемент 16 может быть мягким эластомером, например, силиконом, который может быть достаточно мягким и достаточно большим в диаметре, так что рассекающий элемент 16 не прикладывает чрезмерное усилие к капсульному мешку 6. В некоторых других вариантах осуществления рассекающий элемент 16 может быть достаточно округленным вдоль некоторых участков и кромок таким образом, что усилие, прилагаемое к капсульному мешку 6, распределяется по большей площади, и поэтому разрывающее давление может быть снижено. В некоторых других вариантах осуществления рассекающий элемент 16 может быть составлен из связки нескольких элементов, например, цепочечной конструкции, допускающей гибкое перемещение между несколькими элементами. В некоторых других вариантах осуществления рассекающий элемент 16 может иметь прорези вдоль участков по его длине, которые могут локально повышать его гибкость. Например, рассекающий элемент 16 может включать в себя трубку с вырезами по ее длине в зонах, в которых капсульный мешок 6 может приходить в контакт с рассекающим элементом 16, чтобы упомянутые зоны были более гибкими и поэтому менее предрасположенными к воздействию чрезмерным усилием на капсульный мешок 6. В некоторых других вариантах осуществления участки рассекающего элемента 16 во второй конфигурации захвата не имеют предварительно заданной формы, а другие участки рассекающего элемента 16 имеют предварительно заданную форму. Например, участок рассекающего элемента 16, передний относительно хрусталика, может быть изготовлен из круглой проволоки с памятью формы, которая профилирована до предварительно заданной формы, которая способствует проводке рассекающего элемента 16 в глаз. Например, данный участок может включать в себя изгиб 24 малого радиуса проксимального участка 26. Участок рассекающего элемента 16, задний относительно хрусталика 8, может быть изготовлен из отличающегося, более гибкого материала, который легче приспосабливается к форме глаза. Таким образом, участок рассекающего элемента 16 во второй конфигурации захвата, который допускает введение рассекающего элемента через капсулорексис, включая изгиб малого радиуса, является передним относительно хрусталика 8, и участок рассекающего элемента 16 во второй конфигурации захвата, который контактирует с капсульным мешком 6, состоит из более гибкого материала, еще менее способного повредить капсульный мешок 6.
[0057] В соответствии с некоторыми вариантами осуществления, дополнительные направляющие трубки или компоненты могут выравнивать или направлять траекторию рассекающего элемента 16 через капсулорексис 10 и/или вокруг хрусталика 8. Например, в вариантах осуществления, в которых рассекающий элемент 16 во второй конфигурации захвата не имеет предварительно заданной формы, направляющий элемент может располагаться вдоль зон дистального участка 28 или проксимального участка 26 рассекающего элемента 16, чтобы ограничивать его до получения конкретной формы. Трубка может продолжаться от точки 22 соединения в направлении дистального участка 28, и трубка может концентрически ограничивать гибкий рассекающий элемент 16 таким образом, что он более-менее следует по требуемой траектории в процессе введения в капсульный мешок 6 и размещения вокруг хрусталика 4. Затем направляющую трубку можно отвести назад, с оставлением гибкого рассекающего элемента 16 в заданном месте вокруг хрусталика 4.
[0058] В некоторых других вариантах осуществления предварительно заданная форма рассекающего элемента 16 во второй конфигурации захвата может быть создана в течение любой части хирургической операции. Например, хирург может применить методы визуализации для измерения анатомических особенностей глаза, например, хрусталика 8 или капсульного мешка 4. Затем хирург может использовать данную информацию для создания или изменения формы рассекающего элемента. В качестве альтернативы, элемент оборудования, например, фасонный штамп или автоматическую машину для фасонной гибки проволоки, можно использовать в сочетании с данными измерений, чтобы изменить форму рассекающего элемента 16 во второй конфигурации захвата. В одном варианте осуществления хирург применяет метод визуализации, например, OCT (оптическую когерентную томографию), для выполнения измерения хрусталика 8, и затем данная информация подается в автоматизированную станцию для фасонной гибки проволоки, которая создает индивидуальный рассекающий элемент 16 для пациента. В некоторых других вариантах осуществления хирург может подстраивать или изменять форму рассекающего элемента 16 в то время, когда, по меньшей мере, участок рассекающего элемента 16 находится внутри глаза. Например, хирург может начать размещение рассекающего элемента 16 в капсульном мешке 6 и определить, что его форму можно улучшить. Затем хирург может ввести отдельный инструмент, например, щипцы, в глаз или использовать интегрированный инструмент, связанный со стержнем 12, чтобы подстроить или изменить форму рассекающего элемента 16.
[0059] В соответствии с некоторыми вариантами осуществления, между хрусталиком 8 и капсульным мешком 6 вводят жидкость после того, как делают капсулорексис 10, так что между хрусталиком 8 и капсульным мешком 6 создается пространство в, по меньшей мере, некоторых зонах. Данную операцию можно назвать жидкостной диссекцией, гидродиссекцией или созданием пространства. В соответствии с некоторыми вариантами осуществления, жидкость создает пространство для того, чтобы рассекающий элемент 16 во второй конфигурации захвата поворачивался внутри капсульного мешка 6 и охватывал хрусталик 8. В примерном варианте осуществления можно нагнетать такие жидкости, как вязкоупругую гиалуроновую кислоту или физиологический раствор, поскольку данные материалы обычно применяются в процессе офтальмологической хирургии, хорошо переносятся внутри глаза и широко доступны. Возможно введение одной или более других или дополнительных жидкостей, например, подкрашенных жидкостей, фармацевтических жидкостей типа стероидов, жидкостей, содержащих лекарства, биоабсорбируемых жидкостей, смазок, гидрогелей, микросфер, порошковых веществ, флуоресцентного контрастного вещества, жидких пеноматериалов или любой другой подходящей жидкости. Кроме того, дополнительно или взамен можно нагнетать один или более газов, например, воздух, кислород, аргон, азот и т.п. В качестве альтернативы, в других вариантах осуществления жидкостное пространство между хрусталиком и капсульным мешком 6 может не требоваться, и рассекающий элемент 16 может выполнять механическую диссекцию или тупую диссекцию хрусталика 8 и капсульного мешка 4, когда рассекающий элемент поворачивают вокруг хрусталика 8. Жидкостная диссекция и тупая диссекция могут выполняться в сочетании друг с другом или по-отдельности. Жидкость можно нагнетать через канюлю или иглу в капсульный мешок 6 с помощью отдельного инструмента. В соответствии с другими вариантами осуществления, средства для жидкостной диссекции могут быть включены в элементы хирургического устройства 40, например, рассекающего элемента 16. Например, рассекающий элемент 16 может быть изготовлен в виде гибкой трубки с множеством отверстий по его длине, которые допускают протекание жидкости через них. В таком варианте осуществления жидкость может подаваться в просвет рассекающего элемента 16 и затем вытекать из множества отверстий. Это может повысить возможность прохода рассекающего элемента 16 между капсульным мешком 6 и хрусталиком 8, так как жидкость можно вводить через рассекающий элемент 16 непрерывно или в дискретные моменты времени, когда требуется диссекция. В некоторых других вариантах осуществления нагнетание жидкости может быть частью других аспектов хирургического устройства 40. Например, жидкость можно подавать по просвету 14 стержня 12. В качестве альтернативы, к стержню может быть присоединен компонент, отдельный от стержня 12, например, телескопическая трубка или другая трубка, чтобы предусматривать введение жидкости. В некоторых вариантах осуществления жидкость, которую нагнетают через компонент устройства, например, стержень 12 или рассекающий элемент 16, можно использовать для других хирургических целей. Например, жидкость можно нагнетать по стержню 12, чтобы поддерживать камеру глаза 1 без нужды в отдельной канюле или без необходимости вязкоупругого вещества. Ирригация и аспирация могут осуществляться через единственный компонент или через несколько отдельных компонентов. Например, такие жидкости, как физиологический раствор, можно нагнетать в глаз через просвет варианта осуществления рассекающего элемента 16, как описано выше, и отсасывать через просвет стержня 12. В соответствии с некоторыми вариантами осуществления возможно выполнение других методов ирригации и аспирации.
[0060] Как показано на фиг. 5, рассекающий элемент 16 полностью выдвинут во вторую конфигурацию захвата и повернут вокруг продольной оси стержня 12 и/или иначе повернут или перемещен внутри капсульного мешка 6 в ориентацию, в которой рассекающий элемент 16 охватывает хрусталик 8 без воздействия чрезмерным усилием на капсульный мешок 6. Затем рассекающий элемент 16 используют для разрезания хрусталика 8 посредством натяжения одной или обеих сторон 18, 20 рассекающего элемента 16, например, отведением назад одной или обеих сторон 18, 20 через просвет 14 стержня 12. Чтобы сжимать и разрезать хрусталик 8, рассекающий элемент 16 можно перемещать обратно тому, как описано выше для расширения рассекающего элемента 16 из первой во вторую конфигурацию захвата. По мере того, как рассекающий элемент 16 натягивают, он воздействует направленным внутрь усилием на хрусталик 8 и начинает его разрезание и/или фрагментацию вследствие приложения к хрусталику 8 усилия по небольшой площади поверхности рассекающего элемента 16 узкого диаметра. Рассекающий элемент 16 продолжают натягивать, пока хрусталик 8 не рассекается частично или полностью. В некоторых вариантах осуществления рассекающий элемент 16 натягивают, пока хрусталик 8 не рассекается полностью. В других вариантах осуществления натяжение рассекающего элемента 16 только частично фрагментирует хрусталик 8, и остальную часть хрусталика 8 можно фрагментировать повторным использованием рассекающего элемента или с помощью дополнительных инструментов. На фиг. 6 фрагментированный хрусталик 8 показан внутри капсульного мешка 6. Плоскость сечения расположена, в основном, вертикально, но следует понимать, что возможно любое число углов и ориентаций траектории сечения рассекающего элемента 16. На фиг. 7 хрусталик показан в отсутствие отделенного капсульного мешка.
[0061] В некоторых вариантах осуществления хирургическое устройство 40 может включать в себя несколько рассекающих элементов 16, как описано ниже, для образования нескольких фрагментов хрусталика одновременно. Например, несколько рассекающих элементов 16 могут формировать сетку, которая способна разрезать хрусталик 8 на несколько фрагментов; при этом рассекающие элементы 16 могут находиться под тупыми или острыми углами друг относительно друга таким образом, что они формируют перекрестную картину. В других вариантах осуществления хирургическое устройство 40 можно последовательно использовать на хрусталике 8. Например, после того, как образовано одно сечение, хрусталик 8 (или рассекающий элемент 16) можно повернуть на 90 градусов, чтобы первая плоскость сечения была перпендикулярной плоскости подачи устройства. После этого рассекающий элемент 16 можно повторно ввести в капсульный мешок 6, как описано выше, и использовать для образования нового сечения через два фрагмента хрусталика, что образует в сумме четыре фрагмента. Процесс можно повторять столько раз, сколько необходимо для образования любого числа фрагментов хрусталика любого требуемого размера. Окончательный требуемый размер фрагментов хрусталика может зависеть от способа экстракции из глаза 1. В некоторых вариантах осуществления можно дополнительно применить факоэмульсификацию в капсульном мешке 6, чтобы удалить фрагменты хрусталика. Это может быть особенно полезно при сложных или твердых катарактах, при этом полная фрагментация хрусталика увеличивает площадь поверхности и уменьшает размер фрагментов, которые подлежат эмульгации посредством факоэмульсификации. В других вариантах осуществления фрагменты хрусталика можно экстрагировать, как описано ниже.
[0062] В некоторых вариантах осуществления фрагменты хрусталика могут выталкиваться из капсульного мешка 6 посредством подачи жидкости в капсульный мешок 6 под небольшим давлением. Поток и/или давление жидкости могут перемещать фрагменты хрусталика в переднюю камеру глаза 1, так что для экстракции хрусталика можно использовать другие инструменты и способы. Например, можно использовать щипцы или захватные инструменты, чтобы захватывать фрагменты хрусталика и вытаскивать их из глаза 1 через роговичный разрез 4. В некоторых вариантах осуществления можно использовать рассекающий элемент 16 для улавливания фрагментов хрусталика и вытаскивания их из глаза 1. Рассекающий элемент 16 можно возвратить во вторую конфигурацию захвата и разметить вокруг фрагмента хрусталика. Затем рассекающий элемент 16 можно натянуть или иначе сомкнуть, пока хрусталик 8 не зафиксируется внутри рассекающего элемента, но фрагмент хрусталика не разрезается. После этого фрагмент хрусталика можно вытянуть из глаза 1 рассекающим элементом 16. Для обеспечения того, чтобы хрусталик 8 не разрезался рассекающим элементом 16, можно применить дополнительные компоненты, например, подкладки, ленты или полоски с большей площадью поверхности, которые захватывают фрагмент хрусталика, а не разрезают его. Данные компоненты могут выдвигаться из стержня 12 или могут быть отдельными компонентами, которые вводят в глаз 1 через разрез 4 и присоединяют к рассекающему элементу 16.
[0063] Как показано на фиг. 8-9, один вариант осуществления хирургического устройство 40 включает в себя два рассекающих элемента 16, распространяющихся из дистального конца стержня 12, с механизмом 42 ручки, присоединенным к проксимальному концу стержня 12. На фиг. 15 также показаны два рассекающих элемента 16 в первой конфигурации введения на дистальном конце стержня 12. Ручка 42 содержит два продольно подвижных движка, которые соединены с двумя рассекающими элементами 16, как описано ниже. Движки в данной исходной конфигурации находятся в их отведенном проксимальном местоположении. Стержень 12 и рассекающие элементы 16 в первой конфигурации введения вводят через разрез 4 в роговице в направлении капсулорексиса 10, как описано выше. В контексте настоящего документа, термин «ручка» включает в себя обе ручки, сформированные для ручного захвата и приведения в действие хирургом, а также роботизированную руку, которая связана с хирургическим роботом и сформирована для робототехнического управления и приведения в действие.
[0064] На фиг. 16-17 показан также один вариант осуществления ручки 42 хирургического устройства 40 в разрезе в конфигурации, соответствующей первой конфигурации введения рассекающих элементов 16. Движок 44 является подвижным вдоль верхней поверхности ручки 42. Палец 48 продолжается от движка 44 в ручку 42 через паз в верхней поверхности ручки 42. Палец 48 связан с геликоидальным кулачком 50 или другой кулачковой конструкцией, расположен проксимально от пальца 48, которая продольно зафиксирована к пальцу 48, но которая может свободно поворачиваться аксиально относительно пальца 48. Это можно обеспечить механически посредством штифта, шайбы зацепления или другого подходящего механизма. Траектория 52 кулачка задана на поверхности геликоидального кулачка 50. Геликоидальный кулачок 50 заключен в камере внутри ручки 42, которая позволяет геликоидальному кулачку 50 сдвигаться продольно, но не допускает, по существу, радиального перемещения. Выступ 56 продолжается дистально от пальца 48 и может поворачиваться относительно пальца 48. В предпочтительном варианте выступ 56 зафиксирован от поворота к геликоидальному кулачку 50; в некоторых вариантах осуществления выступ 56 является просто дистальным концом геликоидального кулачка 50. Между пальцем 48 и передним проходным отверстием 60 из ручки 42 расположена возвратная пружина 58, поджимающая палец 48 к первой конфигурации введения. Проксимальный конец возвратной пружины 58 может располагаться по центру выступа 56 и в зацеплении с ним. Проксимальный конец первой стороны 18 рассекающего элемента 16 может быть зафиксирован к выступу 56 любым подходящим способом, например, посредством намотки на выступ, по фрикционной посадке, с помощью сварки, пайки или по прессовой посадке. В качестве альтернативы, проксимальный конец первой стороны 18 может быть зафиксирован к пальцу 48. Упор 62 кулачка образован в ручке 42 и/или зафиксирован к ней и находится в зацеплении с канавкой 52 кулачка. Когда геликоидальный кулачок 50 двигается относительно остальной части ручки 42, упор 62 кулачка остается в одном месте на ручке 42. Если используют два рассекающих элемента 16, то внутри ручки 42 применяют бок о бок два узла, подобных вышеописанному, (движок 44, палец 48, кулачок 50, выступ 56, возвратная пружина 58 и соединение с первой стороной 18 рассекающего элемента 16). Данные узлы могут быть идентичны друг другу, могут быть поперечно зеркальными отображениями друг друга или могут отличаться друг от друга иными способами, который позволяют, по существу, одному и тому узлу приводить в действие два отдельных рассекающих элемента 16 таким способом, который описан ниже. Описание движения движков 44a, 44b и рассекающих элементов 16 является одинаковым для обоих движков 44 и рассекающих элементов 16, если не предусмотрено иное, и описания обоих являются взаимозаменяемыми, если не предусмотрено иное.
[0065] Как показано на фиг. 10, один из рассекающих элементов 16 переводят во вторую конфигурацию захвата путем сдвига соответствующего движка 44b в дистальном направлении. Одна сторона 20 рассекающего элемента 16 может присоединяться к стержню 12, ручке 42 или другой конструкции, зафиксированной относительно ручки 42, и удерживаться в зафиксированном положении, а первая сторона 18 выполнена с возможностью поступательного перемещения и поворота посредством подвижных элементов внутри ручки 42. Как изложено выше, первая сторона 18 присоединена к выступу 56. Как также показано на фиг. 18, когда движок 44 поступательно перемещается в дистальном направлении, палец 48 сжимает возвратную пружину 58, перемещает выступ 56 в дистальном направлении и вытягивает геликоидальный кулачок 50 в дистальном направлении. Возвратная пружина 58 сжимается и передает проксимальное усилие на палец 48. Если пользователь отпускает движок 44, то движок 44, палец 48 и механизмы, зафиксированные к пальцу 48 от поступательного движения, отжимаются проксимально к исходному положению движка 44. Когда движок 44 выдвигается дистально, геликоидальный кулачок 50 перемещается внутри ручки 42. Канавка 52 кулачка может быть, по меньшей мере, продольной при прохождении данного первого отрезка движения движка 44 с таким расчетом, чтобы зацепление между канавкой 52 кулачка и упором 62 кулачка не вызывало поворота геликоидального кулачка 50; и поэтому рассекающий элемент 16 остается в, по существу, одной и той же поворотной ориентации относительно продольной оси стержня 12. Когда движок 44 выдвигается дистально, он выталкивает первую сторону 18 рассекающего элемента в дистальном направлении. В результате, рассекающий элемент 16 изменяет форму во вторую конфигурацию захвата таким же образом, как описано выше со ссылкой на фиг. 1-4.
[0066] Как также показано на фиг. 11, движок 44 можно дополнительно продвинуть дистально после того, как рассекающий элемент 16 изменяет форму до получения второй конфигурации захвата. Канавка 52 кулачка находится в зацеплении с упором 62 кулачка, чтобы повернуть геликоидальный кулачок 50, как видно на фиг. 18-20. Величина дистального перемещения движка 44 управляет величиной поворота геликоидального кулачка 50. Таким образом, линейное движение движка 4 преобразуется в поворотное движение рассекающего элемента 16. Поскольку геликоидальный кулачок 50 и выступ 56 зафиксированы от поворота друг относительно друга, то поворот геликоидального кулачка 50 вызывает поворот выступа 56 и, следовательно, поворот рассекающего элемента 16 во второй конфигурации захвата. Рассекающий элемент 16 поворачивается, и плоскость, заданная формой рассекающего элемента 16, соответственно поворачивается. Рассекающий элемент 16 поворачивается из его исходного положения, которое может быть, по существу, параллельным плоскости, заданной краями капсулорексиса 10, в положение, которое находится, под углом, приблизительно, в пределах 0-40 градусов от вертикальной ориентации. В процессе данного поворота, рассекающий элемент 16 перемещается между капсульным мешком 6 и хрусталиком 8, с захватом хрусталика 8 в раскрытой зоне 46 внутри периметра рассекающего элемента 16. Рассекающий элемент 16 может не захватывать капсульный мешок 6 и/или хрусталик 8, по существу, или может быть выполнен с возможностью захвата либо хрусталика 8 либо капсульного мешка 6. В качестве альтернативы, рассекающий элемент 16 может создавать тупую диссекцию между капсульным мешком 6 и хрусталиком 8.
[0067] Как также показано на фиг. 20, движок 44 перемещается полностью вперед, и поворот геликоидального кулачка 50 и рассекающего элемента 16 завершается. Рассекающий элемент 16 охватывает хрусталик 8 внутри капсульного мешка 6 и выполнен с возможностью приложения направленного внутрь разрезающего усилия относительно хрусталика 8 таким образом, как описано выше со ссылкой на фиг. 4-5.
[0068] Как также показано на фиг. 12-13, затем второй рассекающий элемент 16 можно развернуть во вторую конфигурацию захвата и повернуть в положение для охвата хрусталика 8 таким же образом, как описано выше со ссылкой на фиг. 9-11 и 16-20. Как также показано на фиг. 14, оба рассекающих элемента 16 обхватывают хрусталик 8 таким образом, что, когда рассекающие элементы 16 будут натягиваться или иначе смыкаться, рассекающие элементы 16 будут разрезать хрусталик 8 на три частично или полностью разделенных фрагмента. Как также показано на фиг. 21, натяжение может обеспечиваться сдвиганием движков 44 в проксимальном направлении, с вытягиванием, тем самым, первой стороны 18 каждого рассекающего элемента 16 в проксимальном направлении и ее натяжением. В некоторых вариантах осуществления проксимально направленное усилие, прилагаемое к пальцу 48 возвратной пружиной 58, может быть достаточно большим для разрезания хрусталика 8 без приложения дополнительного усилия пользователем. В других вариантах осуществления пользователь обеспечивает дополнительное усилие, которое фрагментирует хрусталик 8. Это может быть необходимо, в частности, для твердых или сложных катаракт. Каждый рассекающий элемент 16 обхватывает заднюю поверхность хрусталика 8 по линии, отстоящей на некоторое расстояние от другого рассекающего элемента 16, и обхватывает переднюю поверхность хрусталика 8 по, по существу, одной и той же линии, в соответствии с некоторыми вариантами осуществления.
[0069] На фиг. 22 показано, что движок 44 перемещается в проксимальном направлении для возврата в исходное положение. Рассекающий элемент 16 поворачивается обратно в его исходную плоскость введения и затем отводится к стержню 12. Как также показано на фиг. 15, рассекающие элементы 16 могут возвращаться, по существу, в их исходную конфигурацию после рассечения хрусталика. Канавка 52 кулачка геликоидального кулачка 50 может иметь замкнутый контур, как показано. В качестве альтернативы, канавка 50 кулачка может быть односторонней канавкой, при этом движок 44 следует перемещать на всю длину в дистальном направлении и затем в проксимальном направлении, чтобы переместить его в исходное положение. В некоторых вариантах осуществления, в канавку 52 кулачка можно встраивать односторонние защелки или рычажки, которые не допускают поворота или перемещения геликоидального кулачка 50 в некоторых направлениях и могут содержаться в отдельных положениях канавки 52 или по всей канавке 52 кулачка.
[0070] В соответствии с некоторыми вариантами осуществления, рассекающие элементы 16 могут быть выполнены с возможностью перемещения синхронно с приведением в действие единственного движка 44, а не так, чтобы каждый рассекающий элемент 16 был связан с отличающимся движком 44a, 44b, как описано выше. В таком случае, рассекающие элементы 16 могут быть выполнены с возможностью одновременного раскрытия и поворота. В качестве альтернативы, поворот рассекающих элементов 16 может осуществляться с таким сдвигом, чтобы один рассекающий элемент 16 раскрывался первым и поворачивался первым раньше другого рассекающего элемента 16. Данную последовательность действия можно обеспечить за счет связи отличающихся канавки 52 кулачка и упора 62 кулачка с каждым рассекающим элементом 16. В некоторых других вариантах осуществления два движка 44a, 44b могут быть выполнены так, что левый движок 44b будет перемещать оба движка 44 вперед, но правый движок 44a будет перемещать только правый движок 44a вперед (или наоборот). Правый движок 44a может быть выполнен с возможностью перемещения обоих движков 44a, 44b назад, и левый движок может перемещать только левый движок 44b назад. Таким образом, пользователь может, перемещать ли движки 44a, 44b независимо или синхронно.
[0071] В соответствии с некоторыми вариантами осуществления, рассекающие элементы 16 поворачиваются в одном и том же направлении. Например, первый рассекающий элемент 16 раскрывается и затем поворачивается в капсульный мешок 6 по часовой стрелке. Затем второй рассекающий элемент раскрывается и также поворачивается в капсульный мешок 6 по часовой стрелке. В данном варианте осуществления первый рассекающий элемент 16 может поворачиваться на угол 10-40 градусов за пределы вертикальной плоскости, и второй рассекающий элемент 16 может поворачиваться на угол, не достигающий 10-40 градусов до вертикальной плоскости.
[0072] В некоторых других вариантах осуществления можно применить один или более дополнительных или разных механизмов для развертывания рассекающих элементов 16. Например, для развертывания одного или обоих рассекающих элементов 16 можно применить механизм подачи колесом прокрутки или другой поворотный механизм. В некоторых вариантах осуществления перемещение пользователем ускоряется или замедляется при передаче движения рассекающему элементу 16 таким образом, что перемещение на заданную величину компонентов пользовательского интерфейса перемещает рассекающий элемент 16 на большую или меньшую величину благодаря использованию передаточных механизмов, преобразующих шкивов или любого другого числа компонентов. В некоторых вариантах осуществления некоторые части хирургического устройства 40 могут быть механизированы с помощью таких компонентов, как электродвигатели, линейные индукторные двигатели, пневматических устройств, гидравлических устройств, магнитов или чего-то подобного. Хирургическое устройство 40 может входить составной частью в один или более укрупненных робототехнических узлов. Например, робототехническое устройство, которое выполнено с возможностью исполнения операции по удалению катаракты, может включать в себя вариант осуществления хирургического устройства 40. Данное решение может позволить хирургам выполнять части описанного способа робототехническими методами. В некоторых вариантах осуществления данное решение может допускать альтернативные методы и способы, например, подход к капсульному мешку 4 через склеру. В соответствии с некоторыми вариантами осуществления, по меньшей мере, введение стержня 12, содержащего сквозной просвет 14, через роговичный разрез 4 к капсулорексису 10 и выдвижение рассекающего элемента 16 из дистального конца просвета 14, чтобы вынудить рассекающий элемент 16 отогнуться от оси стержня 12 через капсулорексис 10, раскрыться до размера больше капсулорексиса 10 и захватить, по меньшей мере, часть хрусталика 8, выполняются с робототехническим управлением.
[0073] В некоторых вариантах осуществления рассекающий элемент 16 не обязательно должен точно соответствовать петле первоначально, когда его размещают в капсульном мешке 6. Например, рассекающий элемент 16 может быть цельным куском круглой проволоки, которую подают в капсульный мешок 6 из стержня 12, без обратного загиба для формирования петли. В данном варианте осуществления дистальная концевая часть рассекающего элемента 16 затуплена для предотвращения прокола или повреждения ткани внутри глаза 1. Дистальная концевая часть рассекающего элемента 16 может быть выполнена с возможностью изгиба либо согласно предварительно заданному изгибу своей конструкции, либо путем следования по внутренней поверхности капсульного мешка 6, когда дистальная концевая часть рассекающего элемента 16 достигает стенки капсульного мешка 6. Затем рассекающий элемент 16 может пересекать пространство между хрусталиком 8 и капсульным мешком 6 таким образом, что данный элемент проходит по окружности хрусталика 8. После этого рассекающий элемент 16 может вернуться в поле зрения пользователя на верхнем участке капсульного мешка 6, где пользователь может захватить рассекающий элемент 16 с использованием функциональных возможностей ручки 42, например, захватов, или с помощью совершенно отдельного инструмента. С этого момента рассекающий элемент 16 охватывает хрусталик 8 внутри капсульного мешка 6 и почти точно соответствует петле. Когда один или оба конца рассекающего элемента 16 натягивают и/или подтягивают, к хрусталику 8 прилагается направленное внутрь разрезающее усилие таким образом, что он фрагментируется. Рассекающий элемент 16 в данном варианте осуществления может иметь поперечное сечение, которое, предпочтительно, позволяет ему изгибаться в некоторых направлениях легче, чем в других направлениях, так что рассекающий элемент 16 может изгибаться, как требуется для прохождения вокруг контура хрусталика 8, но, все же, следования по подходящей траектории вокруг хрусталика 8, без выхода с траектории в ткань. Данное решение может включать в себя использование поперечного сечения с предпочтительным изгибающим моментом, подобного двутавровому профилю, который изгибается предпочтительно в некоторых плоскостях. В качестве альтернативы, трубка с вырезами для допуска изгиба может быть выполнена с возможностью изгиба в некоторых плоскостях посредством размещения вырезов в данной плоскости. Поэтому рассекающий элемент 16 может изгибаться вокруг хрусталика 8, в основном, дистально-проксимальным образом. Это может улучшить способность рассекающего элемента 16 проходить по требуемой обычной траектории по отношению к капсульному мешку 6 и хрусталику 8. В некоторых вариантах осуществления рассекающий элемент 16 может быть целиком и полностью гибким, так что его дистальная концевая часть может без ограничения проходить по любой предварительно заданной траектории. Дистальная концевая часть может быть выполнена с возможностью включения в себя магнитных или электромагнитных компонентов, к которым можно прикладывать усилие с помощью внешнего электромагнитного поля. В таком случае внешнее устройство можно использовать для управления местоположением дистальной концевой части рассекающего элемента 16 таким образом, чтобы его можно было направлять вокруг капсульного мешка 6 по требуемой траектории. При использовании данного варианта осуществления можно предполагать любое число разных траекторий или плоскостей фрагментации. Хирургическое устройство 40 может включать в себя различные методы визуализации, чтобы создавать требуемую траекторию для дистальной концевой части рассекающего элемента 16, которая не повреждает капсульный мешок 6.
[0074] В некоторых вариантах осуществления рассекающий элемент 16 может разветвляться на несколько участков и/или несколько петель. Например, в исходной конфигурации рассекающий элемент 16 может иметь вышеописанные форму и профиль. Однако, при переходе во вторую конфигурацию захвата, рассекающий элемент 16 может разветвляться по своей длине на два элемента, которые могут иметь одинаковые или сходные формы, или разные формы, каждая из которых охватывает хрусталик 8 целиком или частично. Это может давать рассекающему элементу 16 возможность разрезать хрусталик 8 на несколько фрагментов, без использования двух отдельных рассекающих элементов 16.
[0075] В некоторых вариантах осуществления один или оба рассекающих элемента 16 могут быть выполнены с возможностью подведения энергии одного или более видов, чтобы способствовать тупой диссекции или фрагментации хрусталика 8. Например, один или оба рассекающих элемента 16 могут включать в себя один или более участков, выполненных с возможностью их нагревания с помощью электрорезистивной проволоки, которая нагревается, когда по ней протекает ток. Повышенная температура может улучшать разделение капсульного мешка 6 и хрусталика 8, а также способствовать рассечению хрусталика 8. В качестве альтернативы, можно применить любое число других методов, например, радиочастотную абляцию, электрокаутеризацию, энергию ультразвуковой вибрации и т.п.
[0076] В некоторых вариантах осуществления ручка 42 может включать в себя функциональные возможности подачи жидкости. Например, как описано выше, рассекающий элемент 16 или стержень 12 может допускать нагнетание жидкостей через соответствующие компоненты. Ручка 42 может включать в себя каналы и проходы для жидкости, которые могут соединять упомянутые компоненты с внешними источниками жидкостей посредством трубок, встроенных соединителей и т.п. В качестве альтернативы, ручка 42 может включать в себя внутренние системы нагнетания под давлением, которые принудительно подают жидкость по стержню 12. Жидкость может храниться в цилиндре с поршнем, при этом поршень проталкивают вперед приводными компонентами в ручке 42. Например, отдельный движок или кнопка может быть соединен(а) с поршнем и расположен(а) так, чтобы движок перемещался пользователем, при этом поршень поступательно перемещается и выталкивает жидкость из цилиндра в систему нагнетания. Данное решение может позволить пользователю управлять подачей жидкости через рассекающий элемент 16, стержень 12 или любой другой компонент ручки 42 в некоторые периоды времени в течение процедуры, например, для создания пространства между капсульным мешком 6 и хрусталиком 8. В качестве альтернативы, хирургическое устройство 40 может быть выполнено так, что жидкость нагнетается автоматически хирургическим устройством 40 в течение некоторых периодов в рамках нормальной работы устройства. Например, пружина может быть выполнена с возможностью приложения усилия к поршню таким образом, что, когда геликоидальный кулачок 50 перемещается по его траектории, поршень выталкивает некоторое количество жидкости.
[0077] На фиг. 23, на виде сбоку представлен альтернативный вариант осуществления рассекающих элементов 16. Два рассекающих элемента 16 выдвигаются из дистального конца стержня 12. В данном варианте осуществления рассекающие элементы 16 расположены с возможностью охвата петлями хрусталика 8, начиная с дистального конца 8a хрусталика 8, а не вокруг сторон хрусталика 8, как описано выше. Рассекающие элементы 16 можно выдвигать по одному из дистального конца стержня 12 в дистальном направлении к дистальному концу 8a хрусталика 8 и в капсульный мешок. Рассекающий элемент 16 может почти точно соответствовать проволочной петле, которая выполнена с возможностью наличия предварительно заданной формы и искривлений, чтобы обеспечивать охват петлей хрусталика 8, без приложения чрезмерного усилия к капсульному мешку. Данное решение может включать в себя поперечные изгибы, а также передние и задние искривления, которые формируют различные трехмерные геометрии, когда рассекающий элемент 16 выдвигается из подающего устройства. Для входа в капсульный мешок и захвата хрусталика 8, рассекающие элементы 16 выполнены с возможностью принятия разных форм, когда они раскрываются. Вместо принятия плоской формы, упомянутые рассекающие элементы 16 сгибаются вниз от стержня 12 во второй конфигурации, как видно на фиг. 23. В случае, когда применяется несколько рассекающих элементов 16, каждый может быть выполнен с возможностью сгибания под углом, отличающимся от другого или других. Один конец рассекающего элемента 16 можно выдвигать в то время, как другой остается относительно неподвижным по отношению к подающему устройству, или оба конца можно выдвигать одновременно, как описано выше. Как описано выше, рассекающий элемент может иметь различные профили, материалы или показатели гибкости по его длине.
[0078] Один из рассекающих элементов 16 можно выдвинуть для прохода в пространстве между капсульным мешком и хрусталиком 8 и затем можно переместить вниз и проксимально вокруг хрусталика 8. Второй рассекающий элемент 16 можно выдвигать, как показано, и можно применить любое число других рассекающих элементов 16. В некоторых вариантах осуществления выдвигающийся вперед рассекающий элемент 16 можно применять в сочетании с выдвигающимся вбок рассекающим элементом 16, как описано выше, чтобы создавать пересекающиеся плоскости фрагментации таким образом, чтобы два рассекающих элемента 16 могли рассечь хрусталик на 4 отдельных куска. Кроме того, плоскости фрагментации могут располагаться под всевозможными углами друг к другу, и рассекающие элементы 16 могут продолжаться вокруг хрусталика 8 с любого числа направлений, например, в сочетании вариантов осуществления с выдвижением вперед и выдвижением вбок.
[0079] На фиг. 24, на виде сверху представлен другой альтернативный вариант осуществления. В данном варианте осуществления один из рассекающих элементов 16 закреплен к удерживающему мешку 70 вдоль, по меньшей мере, участка его открытой длины. Удерживающий мешок 70 может быть изготовлен из тонкого полимерного материала, например, сложного полиэфира, полиэтилена высокой плотности, полиэтилена низкой плотности или любого другого подходящего пластика. В качестве альтернативы, удерживающий мешок может состоять из сетки, подобной мелкоячеистой проволочной оплетке из нержавеющей стали, оплетке из никелево-титанового сплава или любого другого подходящего материала. Удерживающий мешок 70 соединен с участком рассекающего элемента 16 и формирует полость, при этом рассекающий элемент 16 может изменяться между раскрытой и сжатой конфигурациями, что открывает и закрывает удерживающий мешок 70. В одном варианте осуществления рассекающий элемент 16 с удерживающим мешком 70 может быть стянут до сжатой формы и размещен в глазу 1 пациента через разрез 4. Удерживающий мешок 70 может быть укрыт в просвете 14 стержня 12 во время введения в глаз 1 через разрез. Затем рассекающий элемент 16 можно разместить около капсулорексиса 10 и ввести в капсульный мешок 6 вокруг хрусталика 8, как описано выше. В некоторых вариантах осуществления удерживающий мешок 70 может иметь предварительно заданную форму, например, например, профиля хрусталика 8 или фрагмента хрусталика. Когда рассекающий элемент 16 охватывает петлей хрусталик 8, удерживающий мешок 70 следует за рассекающим элементом 16, и хрусталик 8 входит в полость, сформированную удерживающим мешком 70. Рассекающий элемент 16 можно перемещать так, чтобы весь хрусталик 8 улавливался в удерживающий мешок 70 по всему периметру хрусталика 8, в соответствии с некоторыми вариантами осуществления. Затем рассекающий элемент 16 переводят в сжатую форму, которая закрывает удерживающий мешок 70 и заключает в себе хрусталик 8. После этого удерживающий мешок 70 вытаскивают из глаза 1 через разрез 4. Хрусталик 8 может складываться и сдавливаться для прохода по длине 4 роговичного разреза, когда его извлекают. Извлекающий мешок 70 может быть с покрытием, нанесенным любым подходящим способом, чтобы повысить возможность его извлечения из разреза 4, например, благодаря снижению коэффициента трения извлекающего мешка 70. В других вариантах осуществления можно применить дополнительные инструменты или компоненты для дальнейшей фрагментации хрусталика 8, в зависимости от жесткости хрусталика 8. Например, как показано на фиг. 24, в капсульный мешок можно вводить несколько рассекающих элементов 16 для фрагментации хрусталика 8 внутри удерживающего мешка 70. Упомянутые дополнительные рассекающие элементы 16 можно располагать в то же самое время, когда располагают удерживающий мешок 70, или можно вводить после того, как удерживающий мешок 70 извлек хрусталик 8 из капсульного мешка, но до того, как хрусталик 8 извлечен из глаза 1.
[0080] В других вариантах осуществления можно применить другие методы фрагментации после того, как хрусталик 8 оказывается внутри удерживающего мешка 70. Например, после того, как хрусталик 8 захвачен удерживающим мешком 70, внутри удерживающего мешка 70 можно использовать ультразвуковую энергию или факоэмульсификацию для фрагментации хрусталика 8. Данный подход может включать в себя телескопическое введение датчиков в удерживающий мешок 70 из дистального конца стержня 12. В качестве альтернативы, можно применить такие механические инструменты, как средства удаления инородных тел, шнеки или подобные устройства, для достаточной фрагментации хрусталика 8, чтобы его можно было вытащить из глаза 1 через узкий роговичный разрез 4.
[0081] В некоторых других вариантах осуществления удерживающий мешок 70, описанный в настоящей заявке, можно применять в качестве извлекающего устройства, используемого после того, как хрусталик 8 фрагментирован, чтобы извлечь фрагменты хрусталика из глаза 1. Например, устройство, показанное на фиг. 1, можно использовать для разрезания хрусталика 8 на любое число фрагментов. Один или большее число из фрагментов могут быть достаточно большими, так что их трудно удалить через роговичный разрез 4 с помощью обычных инструментов. Удерживающий мешок 70 можно использовать для захвата фрагментов хрусталика, находящихся внутри капсульного мешка или плавающих в передней камере, и вытаскивания упомянутых фрагментов через роговичный разрез 4. Кроме того, удерживающий мешок 70 может иметь выполненные в нем вырезы или отверстия, которые допускают проход жидкости или мелких объектов. Например, удерживающий мешок 70 может быть сеткой или оплеткой, которая позволяет водной гуморальной жидкости или вязкоупругой жидкости проникать сквозь отверстия, при этом с удерживанием по-прежнему фрагмента хрусталика.
[0082] На фиг. 25-29 показан другой вариант осуществления хирургического устройства 80 для извлечения фрагментов хрусталика 8f из глаза 1. Хирургическое устройство 80 включает в себя внешний поворотный элемент 82a и внутренний поворотный элемент 82b. Элементы 82a, 82b расположены концентрически по центральной оси, которая может также задавать продольную ось стержня 12. Как показано на фиг. 25, хирургическое устройство 80 исходно находится в первой конфигурации с достаточно небольшим профилем устройства, так что его можно вводить через стандартный роговичный разрез 4, как показано на фиг. 1. Внешний поворотный элемент 82a и внутренний поворотный элемент 82b могут быть трубками, в которых выполнены вырезы вдоль их длины для образования лент 82, разделенных по окружности окнами 84. Внешний поворотный элемент 82a может иметь внешний диаметр, который выполнен в подходящий размер, чтобы допускать вставку в роговичный разрез, при этом, теоретически, внешний диаметр составляет от 0,015 дюйма (0,38 мм) до 0,060 дюйма (1,52 мм), хотя возможен любой внешний диаметр, в зависимости от заданной длины разреза. Внутренний поворотный элемент 82b может иметь внешний диаметр, который выполнен по размеру для концентрической вставки внутри внутреннего диаметра внешнего поворотного элемента 82a. Вырезы в трубках внешнего поворотного элемента 82a и внутреннего поворотного элемента 82b могут быть выполнены лазером, механической обработкой, химическим травлением, соединением сваркой или с использованием любой технологии, подходящей для создания лент 82 и окон 84. Ленты 82 могут быть выполнены по размеру для обеспечения подходящей ширины, которая не врезается в хрусталик 8f, когда прикладывается усилие для сжатия элементов 82a, 82b, как описано ниже. Ширина лент 82 может составлять от 0,004 дюйма (0,1 мм) до 0,050 дюйма (1,27 мм), хотя ленты 82 могут иметь ширину за пределами данного диапазона.
[0083] Внешний поворотный элемент 82a и внутренний поворотный элемент 82b могут быть стянуты во вторую конфигурацию захвата, например, посредством выталкивания дистальной концевой части хирургического устройства 80 вперед с помощью отдельного компонента, подобного толкателю, или посредством ограничения внешнего поворотного элемента 82a с помощью дополнительной внешней трубки, которая покрывает хирургическое устройство 80 во время введения в глаз. В качестве альтернативы, хирургическое устройство 80 является достаточно гибким, так что сжимающий элемент не требуется, и хирургическое устройство 80 изгибается, когда его вводят через роговичный разрез 4. Дистальная концевая часть 86 может соединяться с дистальным концом каждого из внешнего поворотного элемента 82a и внутреннего поворотного элемента 82b и обеспечивает гладкое введение в роговичный разрез и округленную поверхность для контакта с глазными структурами. Дистальная концевая часть 86 может состоять из мягкого полимера, например, полиэфирблокамида марки PEBAX®, полиуретана, термопластичного эластомера или чего-то подобного. В качестве альтернативы, дистальная концевая часть 86 может состоять из твердого материала, например, металла типа нержавеющей стали или титана, или биосовместимого неметаллического вещества. В качестве альтернативы, дистальная концевая часть 86 может быть острой и допускать введение хирургического устройства 80 в глаз 1, без создания предварительного разреза 4, при этом острая дистальная концевая часть 86 формирует разрез. В случае, если внешний поворотный элемент 82a и внутренний поворотный элемент 82b состоят из сверхупругого материала, переход из первой конфигурации во вторую конфигурацию может включать в себя фазовое превращение материала.
[0084] В предпочтительном варианте ленты 82 выполнены с возможностью наличия такой предварительно заданной раскрытой формы, что, как только хирургическое устройство 80 оказывается внутри передней камеры глаза 1, оно раскрывается так, что элементы принимают обратно их предварительно заданную форму. Это можно обеспечить с использованием материала с памятью формы, например, никелево-титанового сплава в его сверхупругом состоянии, который сформирован с возможностью восстановления раскрытого профиля, показанного на фиг. 26, как только сжимающий элемент отпускают. В качестве альтернативы, никелево-титановый сплав может вернуть каждую ленту 82 обратно в раскрытую форму после того, как устройство введено в глаз и нагрето до температуры тела, которая превышает температуру фазового перехода никелево-титанового сплава. В качестве альтернативы, с хирургическим устройством 80 могут быть соединены нагревательные элементы для нагревания хирургического устройства 80 сверх или даже выше температуры фазового перехода, как только хирургическое устройство 80 оказывается в рабочем местоположении, в котором желательна открытая форма второй конфигурации. В других вариантах осуществления внешний поворотный элемент 82a и внутренний поворотный элемент 82b могут состоять из всевозможных материалов. Например, упругие материалы, такие как нержавеющая сталь, титан, пластики или подобные материалы, можно применять в случае, когда деформация меньше предела относительной деформации для упругого восстановления. В качестве альтернативы, участки или вся длина лент 82 может состоять из нескольких материалов, которые могут дополнительно от участков поворотных элементов 82a, 82b. Например, ленты 82 могут быть изготовлены из никелево-титанового сплава и прикреплены к поворотным элементам, которые состоят из нержавеющей стали. В вариантах осуществления, показанных на фиг. 25-29, каждый из двух поворотных элементов 82a, 82b включает в себя две ленты 82. Однако, в конструкции каждого поворотного элемента 82a, 82b может содержаться любое другое подходящее число лент 82, и может быть обеспечено любое подходящее число поворотных элементов 82a, 82b. Например, устройство может включать в себя четыре поворотных элемента 82a, 82b, расположенных друг над другом концентрически, при этом каждый элемент содержит только одну ленту 82. В данном варианте осуществления ленты 82 могут поворачиваться так, что все они сгруппированы вместе, что дополнительно уменьшает профиль сечения устройства в роговичном разрезе 4. В некоторых вариантах осуществления предварительно заданная форма лент 82 представляет собой исходную конфигурацию, и ленты изгибаются наружу во вторую конфигурацию.
[0085] Как показано на фиг. 26, во второй конфигурации поворотные элементы 82a, 82b задают плоскость и окружают центральную зону, которая является раскрытой для вмещения фрагментов хрусталика, которые могут охватываться петлей устройства. Как показано на фиг. 27, хирургическое устройство 80 перемещают для охвата фрагмента хрусталика 8f. Как показано на фиг. 28, внутренний поворотный элемент 82a и внешний поворотный элемент 82b повернули друг относительно друга приблизительно на 90 градусов. В настоящий момент хирургическое устройство 80 находится в третьей повернутой конфигурации. Для получения третьей конфигурации можно повернуть один или оба из поворотных элементов 82a, 82b. Например, чтобы повернуть элементы 82a, 82b в третью конфигурацию, поворачивают трубку 88, прикрепленную к проксимальному концу внешнего поворотного элемента 82b, и/или трубку 90, прикрепленную к проксимальному концу внутреннего поворотного элемента 82a. В других вариантах осуществления поворотные элементы 82a, 82b можно поворачивать друг относительно друга под любым подходящим углом друг к другу. В третьей конфигурации внутренний поворотный элемент 82a и внешний поворотный элемент 82b почти точно соответствуют каркасу, который охватывает фрагмент хрусталика 8f.
[0086] Как показано на фиг. 29, ленты 82 перемещают для сжатия вокруг фрагмента хрусталика 8f. В некоторых вариантах осуществления может применяться сжимающий элемент, например, внешняя оболочка или тяга тянуще-толкающего типа, чтобы сжимать ленты 82. В других вариантах осуществления механизм или способ для раскрывания лент во вторую конфигурацию является реверсивным. Например, в случае, если ленты 82 являются сверхупругими, ленты 82 можно охлаждаться или могут механически поджиматься в процессе фазового перехода к их исходной форме. В других вариантах осуществления поворотные элементы 82a, 82b сжимаются по мере того, как они протягиваются через роговичный разрез 4. Разрез 4 сдавливает и сжимает ленты 82 и хрусталик 8 таким образом, что ленты 82 и хрусталик 8 приспосабливаются к размеру разреза 4, когда их вытягивают. Кроме того, возможно включение в конструкцию других компонентов и механизмов для поддержки извлечения фрагмента хрусталика 8f из глаза 1. Например, в хирургическое устройство 80 можно встраивать или применять с ним пружины сжатия, пневматические механизмы, механизмы с электроприводом и т.п. для вытягивания фрагментов хрусталика 8f из глаза 1. В некоторых вариантах осуществления ленты 82 могут врезаться во фрагмент хрусталика 8f или дополнительно фрагментировать хрусталик.
[0087] В некоторых вариантах осуществления ленты 82 могут заключать удерживающие мешки или быть закрепленными к ним, как описано выше. Мешок может находиться между двумя или более лентами 82 на одном или более из поворотных элементов 82a, 82b. В раскрытой конфигурации фрагмент хрусталика 8f аналогично допускает его размещение внутри центральной зоны внутреннего поворотного элемента 82a и внешнего поворотного элемента 82b. Когда внутренний поворотный элемент 82a и внешний поворотный элемент 82b перемещают в третью конфигурацию, мешок перемещается аналогичным образом и захватывает фрагмент хрусталика.
[0088] В других вариантах осуществления устройство, показанное на фиг. 25-29 может быть образовано любым другим подходящим образом. Например, поворотные элементы 82a, 82b могут и не соединяться на своих дистальных концах и, вместо этого, могут формировать открытый каркас. В некоторых вариантах осуществления поворотные элементы 82a, 82b могут и не быть концентрически выставленными или могут состоять из нетрубчатых конструкций, например, проволок или стержней, или подобных конструкций.
[0089] На фиг. 30 показан альтернативный вариант осуществления. Вместо единственного стержня 12 обеспечены первая подающая трубка 12a и вторая подающая трубка 12b. Каждая трубка содержит просвет по ее длине, и через свободный конец каждой подающей трубки 12a, 12b выдвигается рассекающий элемент 16 для формирования замкнутой формы. Рассекающий элемент 16 может иметь такие же характеристики, как описано выше для любого из вариантов осуществления. Вторая подающая трубка 12b изогнута обратно в проксимальную сторону (вправо, как показано на фиг. 30), так что проксимальный сегмент рассекающего элемента 16 способен поворачиваться вокруг проксимального конца хрусталика 8, при использовании. Свободные концы двух подающих трубок 12a, 12b могут быть отнесены друг от друга на расстояние, на расстояние, которое меньше, чем диаметр капсулорексиса 10. Следовательно, подающие трубки 12a, 12b способны доставлять гибкий рассекающий элемент 16 к хрусталику и обеспечивать, чтобы данный рассекающий элемент 16 поворачивался относительно хрусталика 8 и охватывал, по меньшей мере, часть хрусталика, как описано выше. Использование простого гибкого рассекающего элемента 16 вместо сверхупругого рассекающего элемента 16 может упростить конструкцию устройства. Одной или обеим подающим трубкам 12a, 12b может быть придана форма таким же образом, как, по меньшей мере, части отличающегося варианта осуществления рассекающего элемента 16, показанного на фиг. 1; например, вторая подающая трубка 12b может включать в себя изгиб 24 малого радиуса, который образован самим рассекающим элементом 16 в варианте осуществления на фиг. 1. Как описано выше, рассекающий элемент 16 может быть раскрываемым из менее раскрытого исходной формы в более раскрытую форму захвата. Например, в исходной форме рассекающий элемент 16 может продолжаться, по существу, линейно между концами подающих трубок 12a, 12b, после чего дополнительный участок рассекающего элемента 16 может быть вытолкнут из конца одной или обеих подающих трубок 12a, 12b, чтобы сформировать изогнутую форму захвата, показанную на фиг. 30. С вариантом осуществления, показанным на фиг. 30, работают, по существу, как описано выше.
[0090] В любом из вышеописанных вариантов осуществления, в некоторые элементы устройства 40, 80, например, просвет 14 стержня 12 или внутренний поворотный элемент 82a, может быть включено вакуумное всасывание. Вакуумное всасывание можно использовать для аспирации небольших фрагментов хрусталика или для удерживания фрагмента хрусталика на месте во время перемещения.
[0091] Хотя варианты осуществления различных способов и устройств подробно описаны в настоящей заявке со ссылкой на некоторые исполнения, следует понимать, что возможны также другие их исполнения, варианты осуществления, способы применения и комбинации. Поэтому сущность и объем изобретения не должны ограничиваться описанием вариантов осуществления, содержащимся в настоящей заявке. Более того, хотя различные варианты осуществления и описание могут специально упоминать некоторые анатомические локализации, формы или хирургические операции, следует понимать, что данные варианты осуществления применимы к другим локализациям, формам и хирургическим операциям.
Реферат
Изобретение относится к медицинской технике, в частности к экстракции хрусталиковой или другой ткани в офтальмологической хирургии. Хирургическое устройство для разрезания хрусталика внутри капсульного мешка глаза содержит стержень и рассекающий элемент. Стержень имеет дистальный конец и просвет, образованный через стержень. Просвет имеет продольную ось и дистальный конец. Рассекающий элемент имеет первую сторону и вторую сторону. Рассекающий элемент выполнен с возможностью перемещения относительно стержня из первой конфигурации введения в направлении второй конфигурации захвата, в которой больший участок рассекающего элемента выдвинут из дистального конца просвета. По меньшей мере участок рассекающего элемента расположен внутри просвета, когда находится в первой конфигурации введения. Рассекающий элемент в первой конфигурации введения и дистальный конец стержня выполнены такого размера, чтобы вводить их в переднюю камеру глаза через разрез. Перемещение из первой конфигурации введения в направлении второй конфигурации захвата вынуждает по меньшей мере одну из первой стороны и второй стороны рассекающего элемента продвигаться в дистальном направлении относительно дистального конца стержня с образованием раскрытой зоны, ограниченной рассекающим элементом и дистальным концом. По меньшей мере участок рассекающего элемента ограничивает раскрытую зону, проходящую проксимально относительно дистального конца стержня. Вторая конфигурация захвата рассекающего элемента имеет такой размер и форму, чтобы обеспечить продвижение рассекающего элемента между капсульным мешком и хрусталиком. Хрусталик остается в капсульном мешке, чтобы захватить участок хрусталика в раскрытой зоне. Движок функционально соединен с рассекающим элементом. Движок выполнен с возможностью натяжения рассекающего элемента для уменьшения раскрытой области и разрезания хрусталика. Использование изобретения позволяет обеспечить эффективное измельчение хрусталика на мелкие фрагменты и собор данных фрагментов. 13 з.п. ф-лы, 30 ил.
Комментарии