Ситуативный интерфейс транспортного средства - RU2685998C2
Код документа: RU2685998C2
Чертежи







Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к системе интерфейса транспортного средства, в частности, к прогнозированию использования ситуативного интерфейса транспортного средства.
Уровень техники
Стандартное транспортное средство включает в себя множество систем, которые позволяют пользователю взаимодействовать с транспортным средством. В частности, стандартные транспортные средства имеют различные устройства и возможности для управления и контроля различных подсистем и функций транспортного средства. По мере развития технологий появляется все больше возможностей для управления различными подсистемами транспортного средства. Некоторые из этих функций могут быть представлены пользователю посредством пользовательского интерфейса. Однако данные функции могут отображаться пользователю заранее заданным образом. Таким образом, существует необходимость в улучшенной гибкой системе отображения функций транспортного средства пользователю.
Раскрытие изобретения
Система интерфейса транспортного средства может включать в себя интерфейс, выполненный с возможностью отображать иконки, обозначающие выбираемые функции транспортного средства; контроллер, выполненный с возможностью генерировать оценочное значение каждой функции на основании ситуативной переменной, включая местоположение и/или скорость движения транспортного средства, и/или прогнозированное конечное местоположение транспортного средства, а также отображать одни иконки и скрывать другие иконки на основании сгенерированных оценочных значений.
Контроллер транспортного средства может включать в себя по крайней мере один ситуативный модуль, выполненный с возможностью генерировать по крайней мере одну ситуативную переменную, характеризующую текущую ситуацию движения, включая местоположение транспортного средства или скорость движения транспортного средства, и процессор, запрограммированный генерировать оценочное значение определенной функции на основании местоположения транспортного средства и (или) скорости движения транспортного средства, определенных с помощью по крайней мере одной ситуативной переменной, при этом оценочное значение функции представляет собой вероятность того, что на основании ситуации движения данная функция транспортного средства будет выбрана, а также отображать одни иконки и скрывать другие иконки на основании оценочных значений функции.
Способ может включать в себя прием по крайней мере одной ситуативной переменной от ситуативного модуля, генерирование оценочного значения функции на основании по крайней мере одной ситуативной переменной и отображение иконки, обозначающей определенную функцию транспортного средства, на интерфейсе на основании оценочного значения, при этом иконка выполнена с возможностью обеспечивать взаимодействие с системой, ассоциированной с определенной функцией в транспортном средстве.
Краткое описание чертежей
На фиг. 1 представлен пример компонентов системы пользовательского интерфейса;
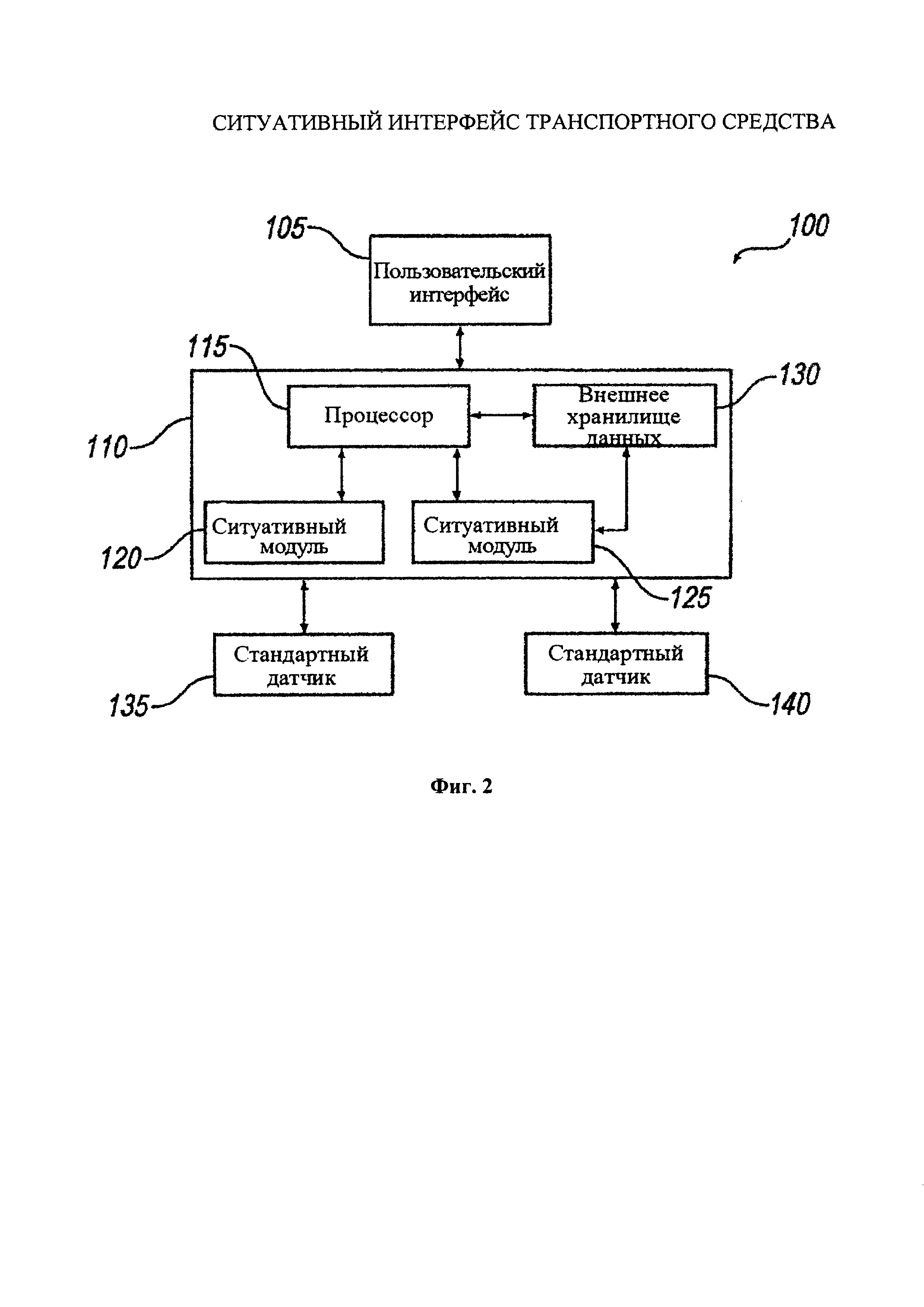
на фиг. 2 представлена схема компонентов системы пользовательского интерфейса с фиг. 1;
на фиг. 3 представлена блок-схема примера способа, который может быть использован системой пользовательского интерфейса;
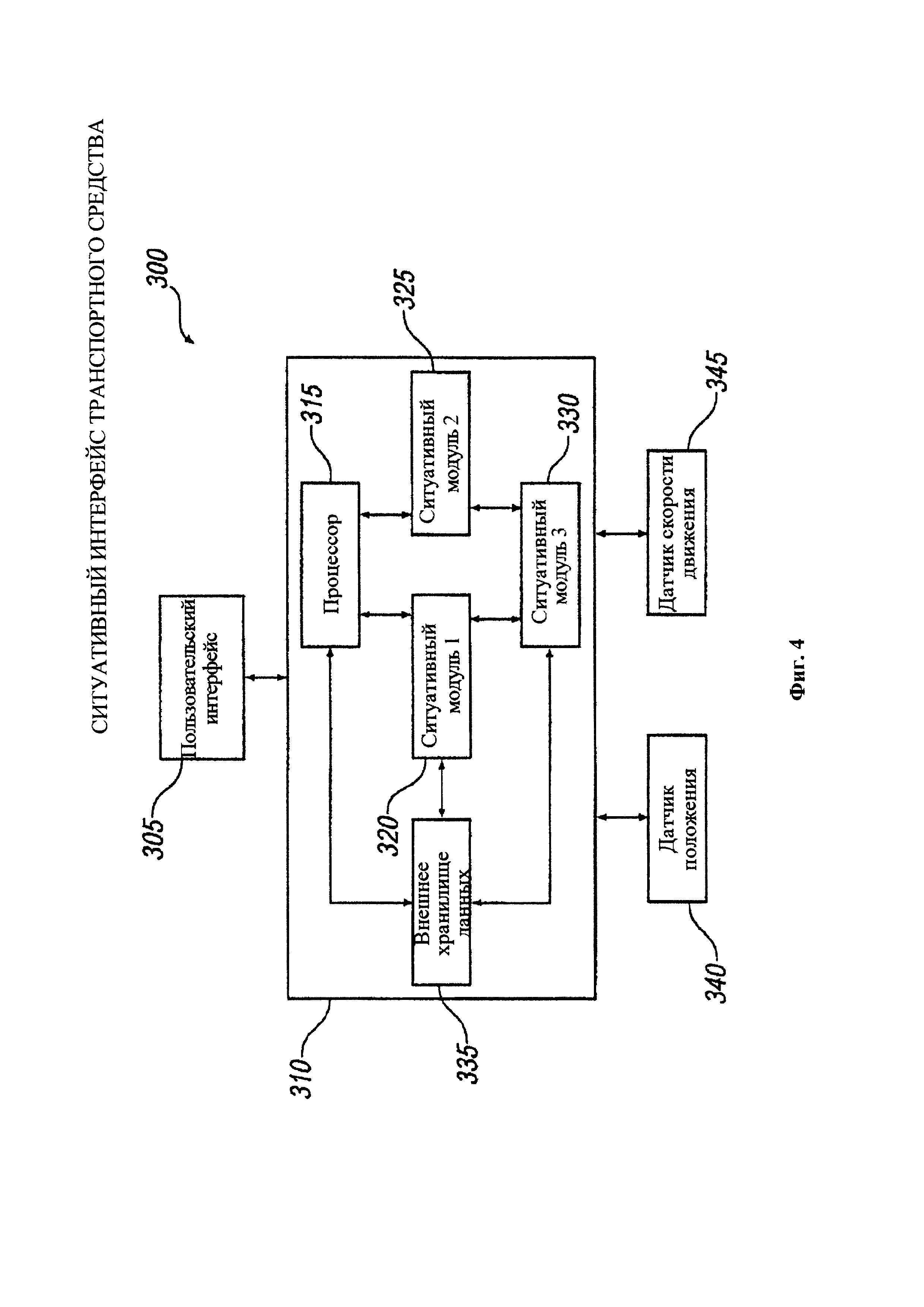
на фиг. 4 представлена схема варианта осуществления системы пользовательского интерфейса с фиг. 1;
на фиг. 5 представлена блок-схема варианта осуществления способа, который может быть использован системой пользовательского интерфейса с фиг. 4;
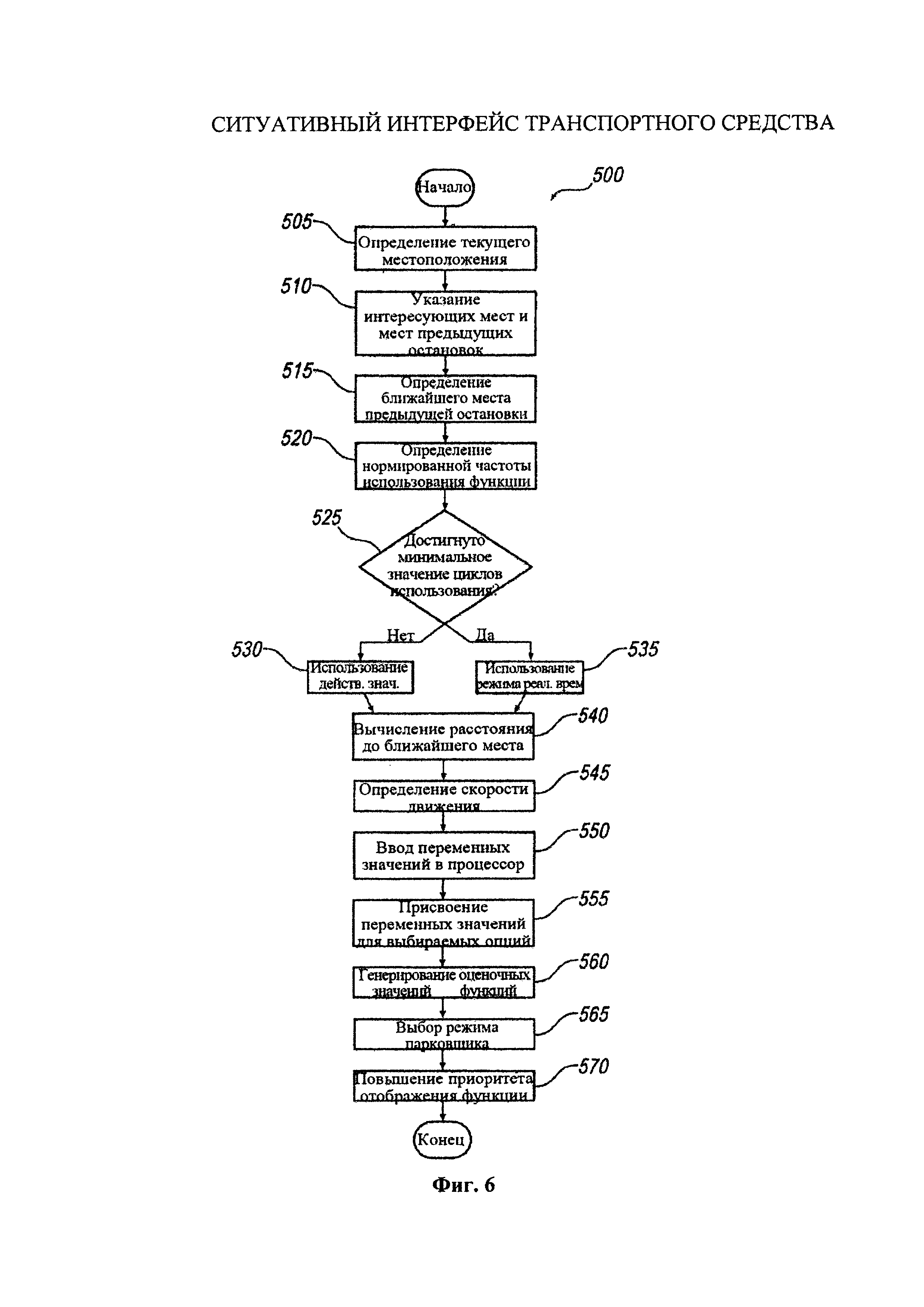
на фиг. 6 представлена блок-схема альтернативного варианта осуществления способа, который может быть использован системой пользовательского интерфейса с фиг. 4;
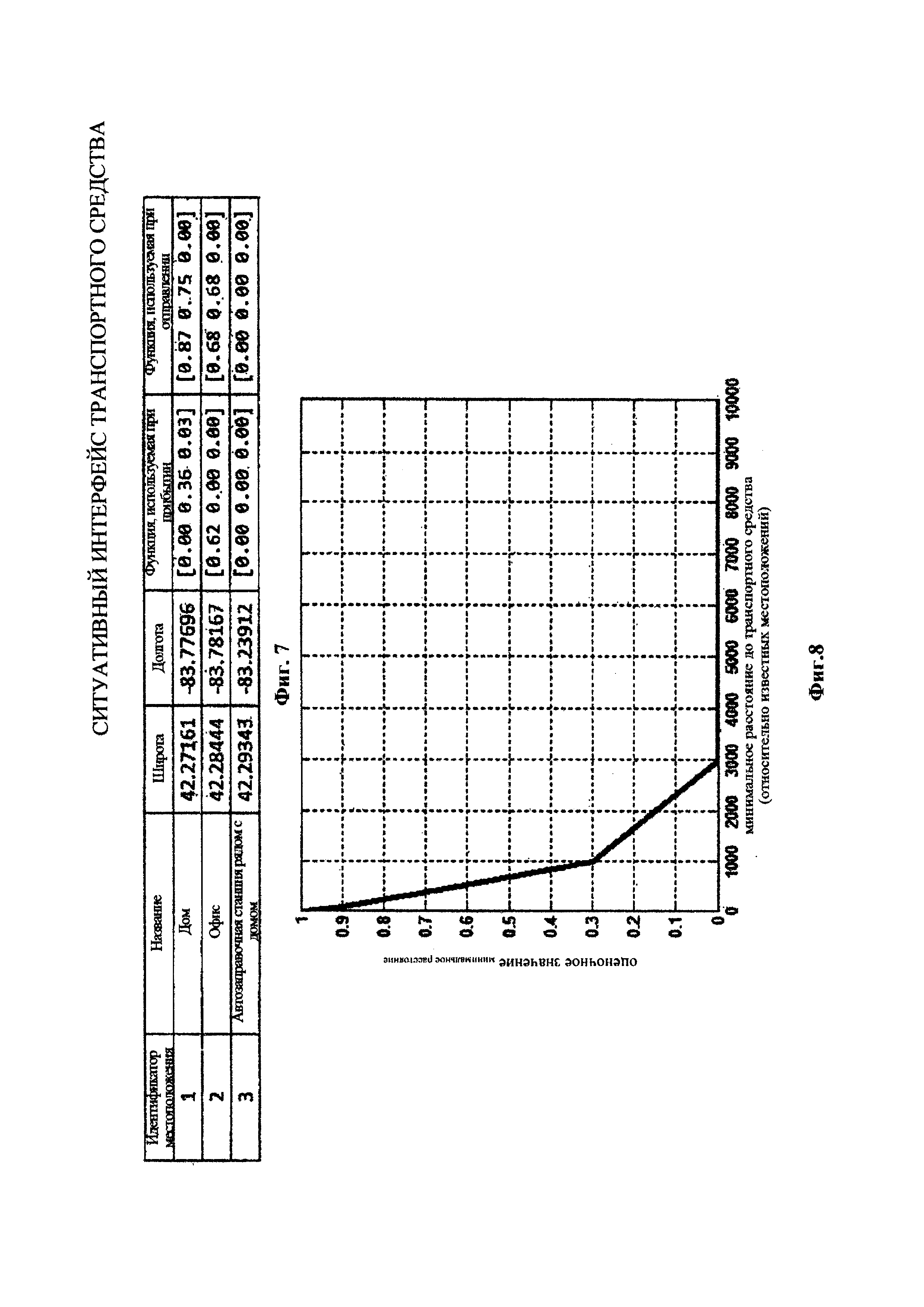
на фиг. 7 представлен пример базы данных о местоположениях, которая может быть использована системой пользовательского интерфейса с фиг. 1;
на фиг. 8 представлен график оценочных значений, характеризующих вероятность прекращения отображения выходных данных компонентами системы пользовательского интерфейса с фиг. 1;
на фиг. 9 представлен график оценочных значений, характеризующих вероятность прекращения отображения выходных данных компонентами системы пользовательского интерфейса с фиг. 1;
на фиг. 10 представлен пример схемы генерирования оценочного значения функции;
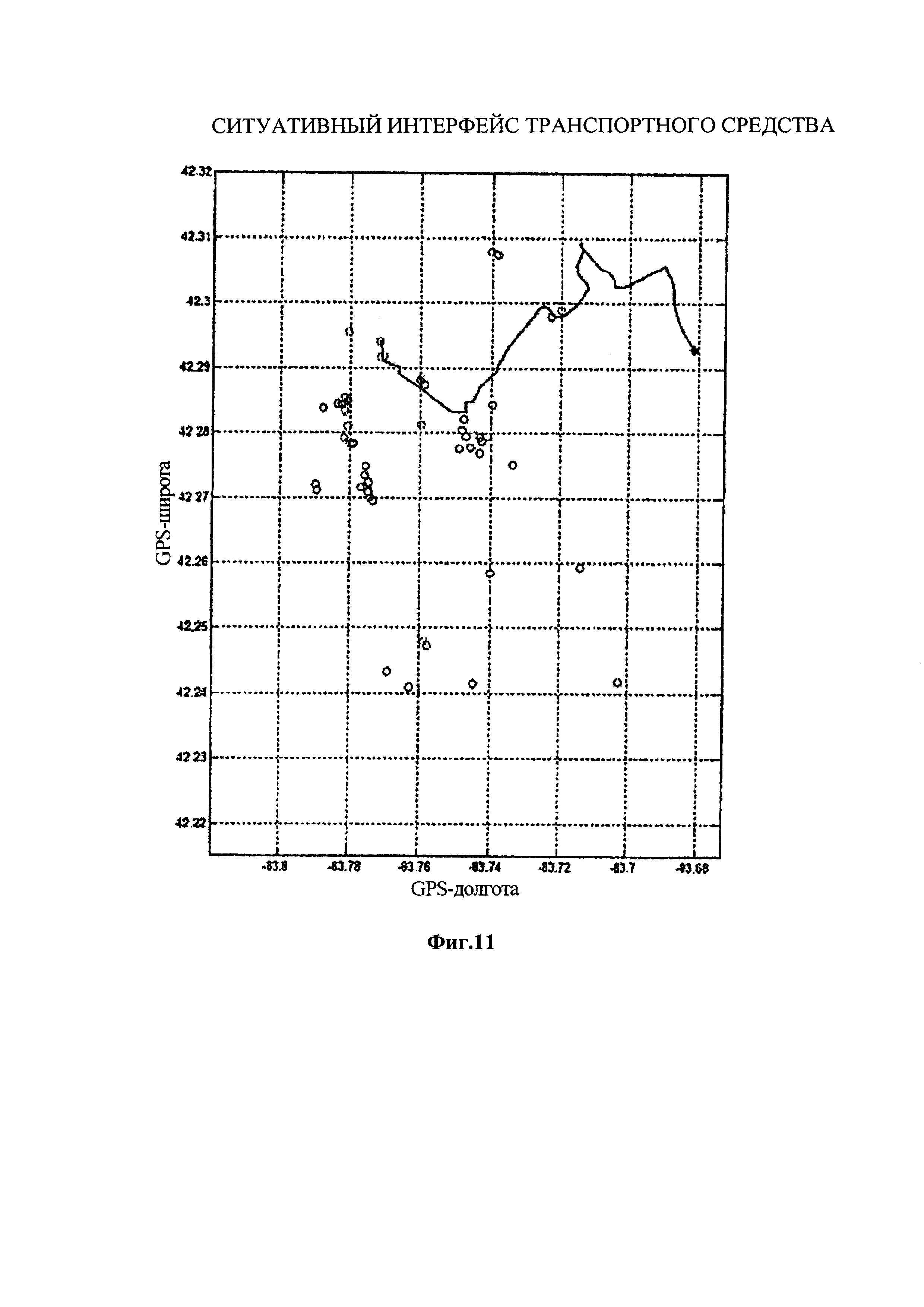
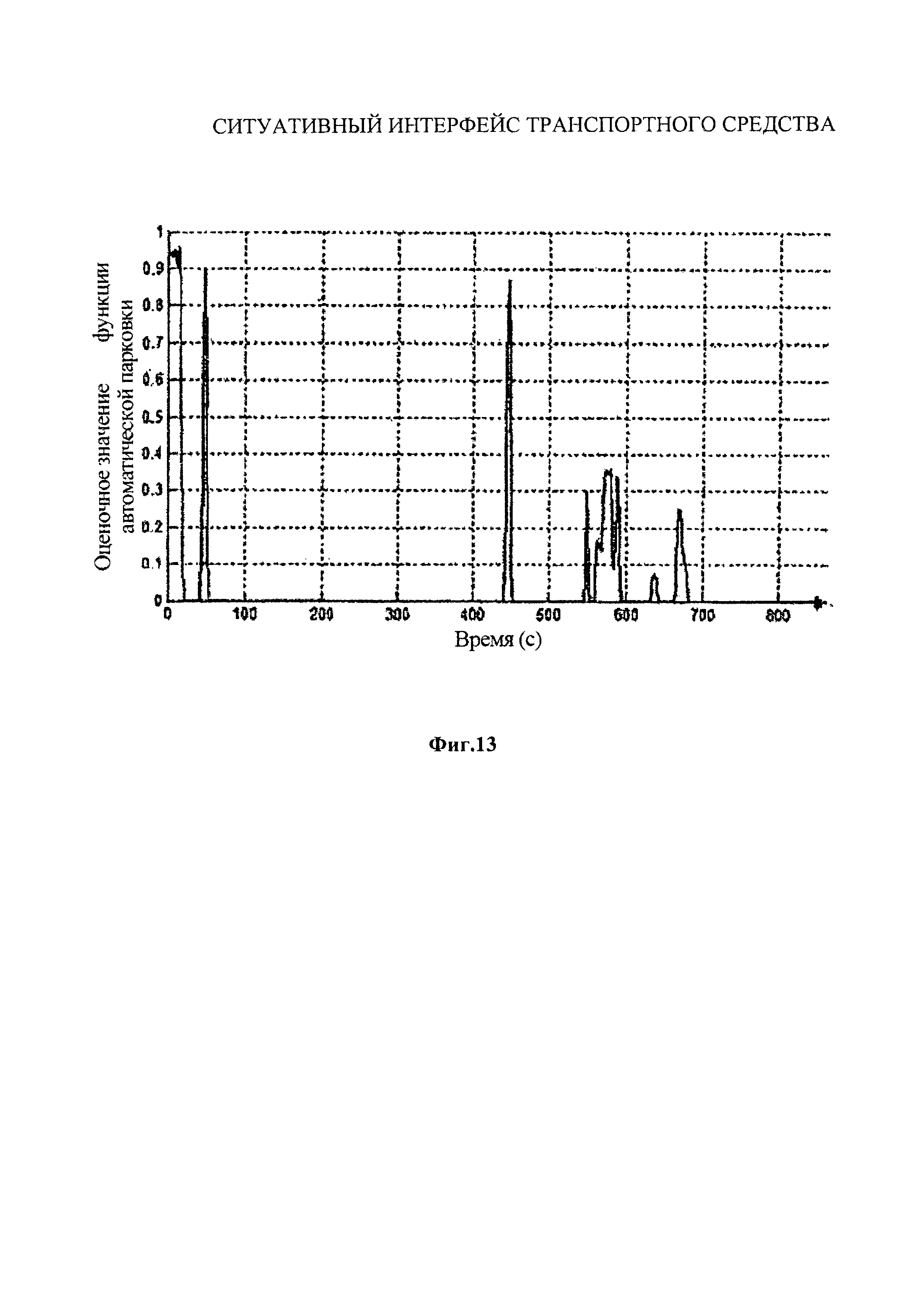
на фиг. 11-13 представлены примеры графиков данных, на которых показаны ситуативные переменные, используемые при генерировании оценочного значения функции;
на фиг. 14 представлен пример блок-схемы способа генерирования оценочного значения функции.
Осуществление изобретения
В соответствии с требованиями в настоящем документе подробно рассмотрены варианты осуществления настоящего изобретения; однако необходимо понимать, что раскрытые варианты осуществления изобретения должны рассматриваться исключительно как примеры осуществления изобретения и что они могут быть реализованы в различных альтернативных формах. На чертежах необязательно соблюдается масштаб, некоторые отличительные особенности могут быть увеличены или уменьшены для более подробного изображения определенных деталей. Таким образом, описание конкретных конструктивных и функциональных деталей следует толковать не как ограничения, а как наглядные примеры для ознакомления специалистов в данной области техники с вариантами осуществления раскрытых в документе концепций.
Системы интерфейса транспортного средства могут управлять различными опциями, позволяющими пользователю получить доступ и взаимодействовать с системами транспортного средства. К таким системам можно отнести системы климат-контроля, навигационные системы, системы парковки и т.д. Каждая система может обеспечивать различные функции (возможности) транспортного средства, такие как круиз-контроль, направление движения, помощь при парковке и т.д. Учитывая текущие условия движения, при эксплуатации транспортного средства в определенные моменты некоторые функции могут быть более актуальными, чем другие. Например, при движении транспортного средства на высокой скорости вероятность активации водителем функции круиз-контроля будет относительно высокой, а вероятность активации водителем функции парковки - относительно низкой. В соответствии с другим примером при движении транспортного средства со скоростью ниже 20 миль в час включение функции круиз-контроля может быть невозможно. Поскольку использование данной функции будет невозможно, то в данном случае она вообще может не отображаться водителю. На основании ситуации движения система интерфейса транспортного средства может использовать прогнозируемую вероятность для увеличения приоритета отображения определенных функций на пользовательском интерфейсе транспортного средства. Другими словами, определенные иконки, обозначающие соответствующие функции транспортного средства, могут отображаться или не отображаться на основании вероятности того, что они будут использованы пользователем. Данный подход позволяет пользователю легко просматривать и выбирать соответствующие функции. Функции, которые нельзя или которые, скорее всего, не нужно будет использовать, могут не отображаться, чтобы водитель не отвлекался во время управления на ненужные опции. В соответствии с примером при использовании функции парковки (например, системы автоматической помощи, камер заднего вида) для определения оценочного значения функции могут использоваться определенные переменные. Например, для определения вероятности использования водителем функции парковки может быть использовано расстояние между текущим местоположением и конечным местоположением. В качестве дополнения для определения оценочного значения функции и увеличения приоритета отображения функции парковки на пользовательском интерфейсе также может быть использовано количество циклов ее выбора водителем в определенном конечном местоположении, а также текущая скорость движения транспортного средства. Более того, может контролироваться текущий статус функции. Если функция уже используется, в увеличении ее приоритета отображения нет необходимости.
Система транспортного средства может включать в себя контроллер, выполненный с возможностью приема входных сигналов от датчиков. Контроллер может генерировать оценочное значение функции, по крайней мере частично, на основании входного сигнала от датчиков и данных о местоположении из базы данных. Контроллер может сопоставлять оценочное значение функции и выбираемую опцию. Контроллер может выдавать команды для пользовательского интерфейса отображать выбираемую опцию в зависимости от оценочного значения функции, в результате чего на основании некоторых атрибутов, например, входных сигналов от датчиков или данных о местоположении, пользователю отобразятся представляющие интерес опции. В соответствии с одним примером выбираемые опции могут включать в себя опцию автоматической парковки и (или) опцию режима парковщика. При выборе опции автоматической парковки она помогает водителю автоматически припарковать его транспортное средство. Другими словами, транспортное средство может самостоятельно выполнять руление при параллельной или перпендикулярной парковке на парковочном месте практически без помощи водителя. В соответствии с другим примером может быть доступна опция режима парковщика. Режим парковщика может включаться рядом с определенными организациями, предоставляющими услуги парковщика, например, рядом с отелями, ресторанами, барами и т.д. Таким образом, система может обнаруживать приближение транспортного средства к месту, где пользователь может захотеть использовать опцию автоматической парковки или опцию режима парковщика. Данным опциям может быть присвоен более высокий приоритет, чем другим функциям, например, круиз-контролю, и они могут быть отображены пользователю на пользовательском интерфейсе. В режиме парковщика может быть выполнено затемнение экрана в транспортном средстве, чтобы человек, управляющий транспортным средством, не мог получить доступ к персональной информации и предпочтительным настройкам владельца транспортного средства, Функция режима парковщика обычно устанавливается в систему, включающую в себя навигационные системы и информационно-развлекательные системы. Такая информация, как, например, домашний адрес владельца транспортного средства, будет недоступна неавторизованным водителям.
На фиг. 1 представлен пример системы пользовательского интерфейса. Система может принимать различные формы и включать в себя дополнительные и (или) альтернативные компоненты и отличительные особенности. Хотя в примере представлен пример системы, не следует рассматривать данные компоненты как ограничения. Более того, могут быть использованы дополнительные или альтернативные компоненты и (или) варианты применения.
На фиг. 1 представлен пример системы 100 пользовательского интерфейса. Хотя в соответствии с описанием данный вариант осуществления используется в автомобиле, система 100 пользовательского интерфейса также может быть реализована в любом другом транспортном средстве, включая, но не ограничиваясь этим, мотоциклы, лодки, самолеты, вертолеты и вездеходы, грузовые автомобили и т.д.
На фиг. 1 и 2 показано, что система 100 включает в себя пользовательский интерфейс 105. Пользовательский интерфейс 105 может включать в себя один интерфейс, например, один сенсорный экран, или несколько интерфейсов. Система 100 пользовательского интерфейса также может иметь интерфейс одного типа или интерфейсы различных типов (например, аудио- и видеоустройства), выполненные с возможностью обеспечения взаимодействия между человеком и машиной. Интерфейс 105 может включать в себя дисплей, такой как сенсорный экран. Также может быть включен дисплей, управляемый различными аппаратными элементами управления. Интерфейс 105 также может включать в себя дисплей на лобовом стекле (HUD), в котором изображения проецируются на лобовое стекло транспортного средства. Пользовательский интерфейс 105 может быть выполнен с возможностью приема пользовательских сигналов от пассажиров транспортного средства. В соответствии с примером пользовательский интерфейс может включать в себя кнопки управления и (или) кнопки управления, отображаемые на сенсорном экране (т.е. аппаратные кнопки и (или) виртуальные кнопки), которые предоставляют пользователю возможность вводить команды и информацию для использования системой 100 пользовательского интерфейса. Для управления различными функциями транспортного средства на контроллер 110 могут поступать входные сигналы для пользовательского интерфейса 105. Например, входные сигналы для пользовательского интерфейса 105 могут быть использованы контроллером 110 для контроля климата в транспортном средстве, взаимодействия с навигационной системой, управления воспроизведением в мультимедийной системе, использования системы автоматической парковки и т.д. Пользовательский интерфейс 105 также может включать в себя микрофон, позволяющий пользователю осуществлять ввод команд или другой информации с помощью голоса.
Контроллер 110 соединен с пользовательским интерфейсом 105. Контроллер 110 может включать в себя любое вычислительное устройство, выполненное с возможностью выполнения машиночитаемых инструкций, которые управляют работой пользовательского интерфейса 105, что описано в настоящем документе. Например, контроллер 110 может включать в себя процессор 115, ситуативный модуль 120 и внешнее хранилище 130 данных. Внешнее хранилище 130 данных может включать в себя флэш-память, RAM, EPROM, EEPROM, жесткий диск и (или) запоминающее устройство любого другого типа. В качестве альтернативы ситуативный модуль 120 и внешнее хранилище 130 данных могут быть встроены в процессор. Другой вариант осуществления может подразумевать наличие нескольких органов управления, соединенных друг с другом, при этом каждый из них может иметь процессор 115, ситуативный модуль 120 и внешнее хранилище 130 данных. Контроллер 110 может быть встроен в пользовательский интерфейс 105 или может быть установлен отдельно.
В общем случае такие вычислительные системы и (или) устройства, как контроллер 110 и пользовательский интерфейс 105, могут использовать любую из числа операционных систем, включая, но, не ограничиваясь версиями и (или) разновидностями, ОС Microsoft Windows®; Unix (например, ОС Solaris® компании Oracle Corporation, Калифорния); AIX UNIX компании International Business Machines, Армонк, Нью-Йорк; ОС Linux; Mac OS X и iOS компании Apple Inc., Купертино, Калифорния; ОС BlackBerry OS компании Research In Motion, Ватерлоо, Канада; а также ОС Android компании Open Handset Alliance. После ознакомления с настоящим описанием специалистам в данной области техники должно быть понятно, что конкретное аппаратное или программное обеспечение пользовательского интерфейса 105 и контроллера 110 может представлять собой любое сочетание, позволяющее выполнять функции представленного варианта осуществления изобретения.
Контроллер 110 может быть выполнен с возможностью управления отображением функции на пользовательском интерфейсе 105 с помощью процессора 115. Процессор 115 может быть выполнен с возможностью обнаружения сигнала от пользователя, указывающего на желание пользователя активировать систему или подсистему транспортного средства, на основании обнаружения выбора выбираемой опции на пользовательском интерфейсе 105. Выбираемая опция создается для каждой доступной в транспортном средстве функции (например, для управления температурой, обогревом сидений, системой автоматической парковки, системой круиз-контроля и т.д.). Каждая выбираемая опция может управлять системой или подсистемой транспортного средства. Например, выбираемая опция для системы круиз-контроля управляет системой транспортного средства, контролирующей постоянную скорость транспортного средства (круиз-контроль). Также каждая выбираемая опция может управлять несколькими системами транспортного средства. Например, пользователь может выбирать выбираемую опцию, соответствующую системе помощи при вождении. Данный выбор может управлять функцией автоматической парковки, а также доступностью определенных камер заднего вида. Выбираемая опция может представлять собой иконку, отображаемую на интерфейсе. Она также может включать в себя текстовое описание функции транспортного средства, которой управляет соответствующая опция, а также другую визуальную информацию.
С помощью процессора 115 контроллер 110 может быть выполнен с возможностью определения функции, которая будет использована водителем или пассажиром с наибольшей вероятностью, а также удаления функции, вероятность использования которой минимальна или равна нулю, на основании конкретной ситуации движения. Для определения функции, являющейся наиболее актуальной в настоящий момент, контроллер 110 может принимать входной сигнал от ситуативного модуля 120, посылающего ситуативные переменные, и от стандартного датчика 135 посредством интерфейса (не показан). Интерфейсы могут включать в себя систему ввода/вывода, выполненную с возможностью передачи и приема данных от соответствующих компонентов. Интерфейс может быть однонаправленным, то есть данные могут передаваться только в одном направлении. Кроме того, интерфейс может быть двунаправленным, т.е. принимать и передавать данные между компонентами.
Контроллер может включать в себя множество ситуативных модулей 120, каждый из которых выполнен с возможностью выдачи ситуативной информации или ситуативной переменной. В соответствии с примером один ситуативный модуль 120 может быть выполнен с возможностью определения расстояния до известного места. Другой ситуативный модуль 120 может быть выполнен с возможностью сравнения скорости движения транспортного средства с текущим ограничением скорости. Еще один ситуативный модуль может быть выполнен с возможностью определения, въехало ли транспортное средство в регион с другими правилами дорожного движения (например, в зону, в которой для разговора по телефону необходимо использовать гарнитуру «свободные руки»). В соответствии с другим примером ситуативный модуль может быть выполнен с возможностью предоставления доступа к хранилищу 130 данных для определения того, как часто используется определенная функция транспортного средства в определенном месте. В соответствии с другим примером каждый выходной сигнал может быть принят каждой из множества выбираемых опций, а также может быть однократно или многократно использован выбираемыми опциями при генерировании оценочного значения функции. Другими словами, каждый из множества ситуативных модулей 120 всегда выполняет одну и ту же операцию, Например, при сравнении скорости движения с действующим ограничением скорости ситуативный модуль 120 всегда будет выдавать одно и то же ситуационное условие, хотя это условие может быть получено и другими выбираемыми опциями. Ситуативная переменная также может использовать информацию о транспортном средстве и о модуле транспортного средства для выдачи ситуативного оценочного значения. Например, функция автоматической парковки может оставаться нерабочей/неактивной до тех пор, пока скорость транспортных средств не опустится ниже 10 миль в час. В данном случае выходное ситуативное оценочное значение также характеризует конструкцию подсистемы транспортного средства и (или) предельные значения физических характеристик, при которых может работать и которыми обладает водитель/пассажир.
Ситуативная переменная может представлять собой конкретное условие движения, например, скорость движения транспортного средства или предыдущее место, в котором водитель активировал определенную функцию. Значения ситуативных переменных могут быть получены от ситуативного модуля 120 или стандартного датчика 135. Контроллер 110 может быть выполнен с возможностью выбора функции, которая с большой вероятностью будет использована пользователем, на основании входного сигнала, принятого от ситуативного модуля 120 и стандартных датчиков 135. Например, при определенных обстоятельствах или ситуации движения контроллер 110 может указывать, что функция круиз-контроля может быть особенно актуальна. В соответствии с одним подходом каждая функция, доступная на пользовательском интерфейсе 105, отображена определенной выбираемой опцией. Например, функция открывания ворот гаража может всегда соответствовать или ассоциироваться с выбираемой опцией для устройства открывания ворот гаража.
Ситуативные переменные могут представлять собой численное значение, зависящее от ситуации движения. В соответствии с одним возможным вариантом применения ситуативные переменные могут принимать значения в диапазоне от 0 до 1, при этом «1» соответствует самому большому значению. В качестве альтернативы или дополнения ситуативные переменные могут характеризовать определенную ситуацию, например, температуру окружающей среды, наличие осадков или расстояние до конкретного места или конечного местоположения. Например, выдаваемая ситуативная переменная может указывать на приближение транспортного средства к месту, где предусмотрены услуги парковщика. Выдаваемый сигнал может характеризовать приближение транспортного средства к автомобильной парковке, парковочному месту на стоянке или к парковочному месту на улице. Существует два типа ситуативных переменных: простые ситуативные переменные и интеллектуальные ситуативные переменные. Простые ситуативные переменные могут быть получены от стандартного датчика 135. Стандартный датчик 135 может представлять собой любой датчик или систему датчиков, установленных в транспортном средстве. Например, стандартный датчик 135 может включать в себя аудиодатчики, световые датчики, акселерометры, датчики скорости движения, датчики температуры, навигационные датчики (например, GPS-датчик) и т.д. Интеллектуальные ситуативные переменные могут быть выданы ситуативным модулем 120 и могут представлять собой другие ситуативные переменные, объединенные в значения, которые невозможно сразу получить с помощью оборудования транспортного средства. Другими словами, данные системы или подсистемы транспортного средства не могут генерировать сами по себе интеллектуальные ситуативные переменные. Например, для получения интеллектуальных ситуативных переменных ситуативный модуль 120 может получать входные данные на основании простых ситуативных переменных, принимаемых от стандартных датчиков 135, или других интеллектуальных ситуативных переменных, принимаемых от ситуативных модулей 120, после чего ситуативный модуль 120 может объединять эти выходные данные в комплексные значения (например, в группы из нескольких значений). Существуют различные способы, с помощью которых ситуативный модуль может сгенерировать данные значения. Например, данные способы могут включать в себя простые или усложненные алгебраические методы расчетов, нечеткую логику, нейронные сети, статистический подход, частотный подход и т.д.
Контроллер 110 может включать в себя данные о местоположении, сохраненные в базе данных, например, на внешнем хранилище 130 данных. Внешнее хранилище 130 данных может быть встроено в контроллер 110 или может представлять собой отдельный компонент. Данные о местоположении могут включать в себя данные о местах остановки, например, о предыдущих местах остановок транспортного средства, либо данные о выбираемой опции, которые могут включать в себя, например, количество циклов использования выбираемой опции в предыдущем месте остановки (например, использование функции, основанной на местоположении). Общедоступная информация для парковочного места может содержать информацию о том, является оно платным или бесплатным, и (или) о стоимости парковки (если это применимо). Данные о местоположении также могут включать в себя данные об интересующем месте, например, об интересующих местах, в которых предоставляются услуги парковщика (например, рестораны, отели, конференц-залы и т.д.). Данные об интересующем месте также могут включать в себя предпочтения пользователя для разных ситуаций, например, предпочтения, касающиеся посещения мест, где собирается много или мало людей. Например, пользователь может предпочитать посещать рестораны, в которых предоставляются услуги парковщика, что может повлиять на оценочное значение функции, приписываемое каждой выбираемой опции. Хотя внешнее хранилище данных 110 может являться частью контроллера 110, оно также может быть установлено отдельно от контроллера 110 и может быть соединено с ним посредством сети, например, с помощью облачной вычислительной среды или интерфейса прикладного программирования (API) по сети Интернет.
Процессор 115 может быть выполнен с возможностью обмена данными с внешним хранилищем 130 данных при необходимости использования сохраненной информации при генерировании выбираемой опции. Для генерирования интеллектуальной ситуативной переменной внешнее хранилище 130 данных может обмениваться данными с ситуативным модулем 125. Аналогичным образом внешнее хранилище 130 данных может обмениваться данными непосредственно с процессором 115. Внешнее хранилище 130 данных может содержать общую информацию, например, навигационную базу данных, в которой могут быть сохранены правила дорожного движения, действующие на конкретных улицах и районах, или пользовательскую информацию, например, предпочтительную температуру в салоне транспортного средства. В качестве альтернативы или дополнения внешнее хранилище 130 данных может отслеживать активацию функций транспортного средства в определенных местах или при определенных условиях движения. Например, внешнее хранилище данных может сохранять данные о количестве активаций системы круиз-контроля на определенном шоссе. Это, в свою очередь, может повлиять на оценочное значение функции круиз-контроля при движении транспортного средства по данному шоссе. Также внешнее хранилище 130 данных может обновлять информацию, например, с помощью телематических систем или любой другой подходящей техники. Телематическая система, расположенная в транспортном средстве, может быть выполнена с возможностью приема обновлений от сервера или другого источника (например, от дилерского центра). Аналогичным образом информация на внешнем хранилище 130 данных может быть обновлена вручную с помощью сигнала от пользователя транспортного средства, передаваемого на пользовательский интерфейс 105. Более того, контроллер 110 может быть выполнен с возможностью задействовать систему 100 пользовательского интерфейса для обмена данными с мобильным устройством по беспроводной сети. Такая сеть может включать в себя беспроводной телефон, устройство Bluetooth®, планшетный компьютер, а также устройства 3G и 4G и т.п.
В представленном примере пользовательский интерфейс 105 может позволять пользователю указывать его предпочтения для определенного местоположения. В качестве своих предпочтений пользователь может указать места, в которых предусмотрена услуга парковщика или предлагается уединенная обеденная обстановка. Эти предпочтения могут быть сохранены на внешнем хранилище 130 данных (например, в качестве интересующих мест) и могут быть использованы ситуативным модулем 120, 125 для выдачи ситуативных переменных. Например, оценочное значение функций для режима парковщика в определенном месте может быть определено выше (в частности, может иметь большее оценочное значение функции) в том случае, если пользователь установил предпочтение включать режим парковщика вне зависимости от того, останавливался он там ранее или нет. Соответствующая настройка собственных предпочтений позволит избежать необходимости остановки в определенном месте для получения высокого оценочного значения для него.
Процессор 115 может быть выполнен с возможностью обнаружения входных данных, например, ситуативных переменных, передаваемых ситуативным модулем 120. Процессор 115 может сохранять каждую выбираемую опцию, соответствующую определенной функции, доступ к которой пользователь может получить с помощью пользовательского интерфейса 105. Каждая выбираемая опция принимает входные данные в виде нескольких ситуативных переменных, генерируемых стандартным датчиком 135 и ситуативным модулем 120. Процессор 115 объединяет полученные переменные для генерирования оценочного значения функции, связанной с выбираемыми опциями, которое указывает вероятность использования конкретной функции пользователем. Таким образом, для каждой выбираемой опции устанавливается определенное оценочное значение функции. Однако в зависимости от условий движения и ситуации оценочные значения функции, соответствующей выбираемым опциям, могут различаться. Для объединения ситуативных переменных можно использовать множество способов, включая, но не ограничиваясь этим, умножение, суммирование, усреднение или использование нелинейных алгоритмов, таких как нечеткая логика. В соответствии с одним вариантом осуществления процессор 115 может устанавливать для выбираемой опции оценочное значение, находящееся в диапазоне от 0 до 1, при этом «0» соответствует функции с низкой вероятностью использования в данный момент, а «1» соответствует функции с высокой вероятностью использования. Таким образом, используемая функция (например, используемая в данный момент система или подсистема транспортного средства) будет иметь низкое оценочное значение в десятичной системе, поскольку вероятность активации данной функции в ближайшее время мала. Однако данное предпочтение может быть изменено водителем или производителем так, чтобы оценочное значение, равное «1», указывало на то, что пользователь использует данную функцию в текущий момент. Десятичное оценочное значение представлено в качестве примера, при необходимости можно использовать различные диапазоны значений.
После того как процессор 115 сгенерирует оценочное значение функции, он может повысить приоритет ее отображения на пользовательском интерфейсе 105. На основании предпочтений водителя или производителя процессор 115 может выбрать опцию с наибольшим оценочным значением и отобразить ее на пользовательском интерфейсе 105. Наибольшее оценочное значение может соответствовать предпочтительной выбираемой опции или выбранной функции. Другими словами, выбираемая опция с наибольшим оценочным значением для функции может представлять собой предпочтительную функцию. В альтернативном варианте осуществления изобретения процессор 115 может ранжировать выбираемые опции на основании их оценочных значений функции и выбирать несколько функций с наибольшим оценочным значением для функции для отображения на пользовательском интерфейсе 105. Выбираемые опции, соответствующие наименьшим оценочным значениям, могут быть скрыты или удалены с пользовательского интерфейса 105. Иконки, отображаемые на пользовательском интерфейсе 105, могут непрерывно изменяться при каждом изменении оценочных значений для функций.
В соответствии с одним примером в транспортном средстве может быть предусмотрена функция автоматической парковки, такая как система активной автоматической парковки для параллельной парковки, или стандартная функция парковки с использованием камер заднего вида для перпендикулярной парковки. Вероятность использования разных функций парковки может быть выше в определенных местах, в определенных географических областях (например, в городе, пригороде, популярных местах и т.д.), в определенное время суток и т.д. Также функции парковки могут быть использованы с большей вероятностью при движении транспортного средства с низкой скоростью. В соответствии с данным иллюстративным примером данные о текущем местоположении транспортного средства (например, с помощью GPS-системы) могут быть выданы стандартным датчиком (например, стандартным датчиком 135). Другой стандартный датчик (например, стандартный датчик 140) может выдавать данные о скорости движения транспортного средства. Оба выходных значения могут представлять собой простые ситуативные переменные. Простые ситуативные переменные, характеризующие скорость движения и местоположение, могут быть приняты ситуативным модулем 120. Ситуативный модуль 120 может использовать текущее местоположение для получения дополнительных интеллектуальных ситуативных переменных. В соответствии с одним примером текущее местоположение может быть использовано для определения возможных конечных местоположений (например, предпочтительного конечного местоположения). Данные конечные местоположения могут быть введены пользователем с помощью навигационной системы. Они также могут представлять собой сохраненные или прогнозируемые местоположения. Прогнозируемые конечные местоположения могут быть сравнены с текущим местоположением. Может выполняться выбор и анализ конечного местоположения, ближайшего к текущему местоположению. Ситуативный модуль 120, 125 может использовать конечное местоположение для определения типа функций, выбранных пользователем в данном конечном местоположении ранее. Другими словами, может определяться, использовал ли в определенном конечном местоположении пользователь функцию парковки. В качестве дополнения данные ситуативные переменные и другие переменные могут поступать на ситуативный модуль 120, 125. В соответствии с одним примером ситуативный модуль 120, 125 может принимать общедоступные данные о парковке, содержащие информацию о возможных вариантах парковки рядом с текущим местоположением. Эти переменные могут быть переданы на процессор 115, который может установить оценочное значение функции для каждой выбираемой опции с учетом определенной ситуации движения. В соответствии с одним примером, если транспортное средство находится близко к местоположению, в котором в транспортном средстве обычно используется функция парковки, но оно движется с высокой скоростью, то ситуации движения может быть присвоено низкое оценочное значение (например, 0,3). В соответствии с другим примером, если транспортное средство движется с относительно низкой скоростью, то ситуации движения может быть присвоено более высокое оценочное значение (например, 0,8). Процессор 115 может выбирать опцию (опции) с наибольшим оценочным значением и отображать их на пользовательском интерфейсе 105. Выбираемая опция может заменять текущие опции, если оценочное значение некоторой функции, соответствующее выбираемой опции, превышает оценочное значение функции, соответствующей текущей отображаемой опции.
В соответствии с предыдущим примером для определения оценочного значения функции для парковки система 100 может использовать текущее местоположение транспортного средства, конечное местоположение, а также скорость движения транспортного средства. Конечное местоположение может представлять собой требуемый пункт назначения, указанный пользователем. Конечное местоположение может быть определено с помощью ситуативного модуля 120, 125. Оно также может быть определено другим компонентом (например, GPS-системой) в ответ на сигнал от пользователя. Как было сказано выше, конечное местоположение также может представлять собой прогнозированное местоположение или пункт назначения. Прогнозированный пункт назначения может быть определен с помощью модуля динамического обучения и прогнозирования. Модуль может быть способен обучать и перекодировывать различные привычки водителя при остановке и трогании, а также часто посещаемые местоположения, распознаваемые без ввода соответствующего сигнала от пользователя. Модуль прогнозирования может учитывать несколько факторов, таких как время суток, день недели и т.д. Таким образом, когда транспортное средство начинает движение по распознанному маршруту, модуль может определить, что конечное местоположение представляет собой один из нескольких вероятных местоположений, используя ретроспективные данные о пользователе и (или) транспортном средстве. Также прогнозируемое местоположение может представлять собой местоположение, в котором пользователь использовал функцию парковки в прошлый раз. Данные о предыдущих местах парковки могут быть определены пользователем и храниться в хранилище 130 данных в соответствии с приведенным описанием.
Конечное местоположение также может быть использовано для определения возможного парковочного места, обнаруживаемого на основании внешних данных. Парковочное место, обнаруживаемое на основании внешних данных, может отличаться от конечного местоположения тем, что парковочное место может представлять собой автомобильную парковку или место на автомобильной парковке рядом с конечным местоположением. Парковочные места, обнаруживаемые с помощью внешних данных, могут быть получены из хранилища 130 данных или другого источника, такого как мобильное устройство, передаваемых по беспроводному каналу связи или специальному каналу. Например, картографическое приложение в мобильном устройстве может выдавать информацию о ближайших автомобильных парковках на процессор 115 и (или) ситуативный модуль 120, 125. Карта района также может быть использована для выдачи данных о местоположении различных автомобильных парковок. Хранилище 130 данных также может включать в себя базу картографических данных о доступных автомобильных парковках. Таким образом, автомобильные парковки, обнаруживаемые на основании внешних данных, могут быть определены с помощью информации от хранилища 130 данных, другого компонента системы 100 интерфейса или отдельного компонента. В некоторых случаях автомобильные парковки, обнаруживаемые на основании внешних данных, могут быть определены с помощью общедоступного источника, а также частной базы данных.
На фиг. 2 представлена схема взаимодействия компонентов системы 100 пользовательского интерфейса. Сначала контролер принимает входной сигнал от стандартных датчиков 135 и 140, которые выполняют сбор информации от датчиков и систем датчиков, установленных в транспортном средстве, и выдачу простых ситуативных переменных. Например, стандартный датчик может представлять собой датчик температуры окружающей среды, датчик скорости движения или GPS-датчик определения местоположения транспортного средства. Для генерирования интеллектуальных ситуативных переменных ситуативные модули 120 и 125 могут принимать простые ситуативные переменные, другие интеллектуальные ситуативные переменные и (или) данные о местоположении, поступающие от внешнего хранилища 130 данных. Данные о местоположении, поступающие от внешнего хранилища 130 данных, могут включать в себя данные о местоположениях парковок, полученные из общедоступного источника, а также из частной базы данных. Для определения значений интеллектуальных ситуативных переменных и простых ситуативных переменных для множества выбираемых опций данные переменные могут поступать на процессор 115. Каждая выбираемая опция связана с оценочным значением для функции, которое было сгенерировано на основании значений принятых ситуативных переменных. Каждая выбираемая опция непрерывно принимает входные данные от стандартных датчиков и ситуативных модулей. Однако в зависимости от ситуации движения оценочные значения функции, связанные с выбираемыми опциями, могут быть разными. Например, если ситуативные переменные указывают на то, что транспортное средство движется по шоссе со скоростью, близкой к значению ограничения скорости, то выбираемая опция для функции круиз-контроля получит высокое оценочное значение, а функция обогрева сидений или открывания ворот гаража получит низкое оценочное значение.
Процессор 115 может ранжировать выбираемые опции в соответствии с их оценочным значением функции. Процессор 115 может выбирать опцию с наибольшим оценочным значением. В зависимости от конфигурации системы 100 пользовательского интерфейса процессор 115 может увеличивать приоритет отображения выбираемой опции с наибольшим оценочным значением или может увеличивать приоритет отображения нескольких выбираемых опций на пользовательском интерфейсе 105. При этом процессор 115 может прекращать отображать функцию (функции) на пользовательском интерфейсе 105, вероятность использования которой снизилась. Стандартные датчики 135, 140 и ситуативные модули 120, 125 всегда активны и непрерывно генерируют оценочное значение функции для каждой выбираемой опции. Процессор 105 использует эти оценочные значения для предоставления наиболее актуальной информации о ситуации движения на интерфейс 105, за счет чего выбираемая опция с наибольшим оценочным значением всегда будет отображаться на пользовательском интерфейсе 105.
На фиг. 3 представлена блок-схема способ 200, который может быть выполнен с помощью системы 100 пользовательского интерфейса. Работа системы 100 пользовательского интерфейса может запускаться (этап 205) автоматически при включении зажигания транспортного средства. В этот момент транспортное средство может выполнять внутреннюю проверку системы, в которой будет определяться состояние готовности одной или нескольких систем и (или) подсистем транспортного средства, что позволит удостовериться в готовности транспортного средства к работе. При выполнении внутренней проверки на этапе 210 система 100 также может классифицировать выбираемые опции, доступные в транспортном средстве. Система 100 может дополнительно подразделять доступные функции (и соответствующие выбираемые опции) системы 100 пользовательского интерфейса на две группы: группа отправления и группа прибытия. Группа отправления может включать в себя функции, часто используемые при выезде из определенного места, например, открывание ворот гаража или климат-контроль. Группа прибытия может включать в себя функции, часто используемые при движении по маршруту или при приближении к месту назначения, например, круиз-контроль или автоматическую парковку. Процесс классификации может быть выполнен контроллером 110. Разделение функций на классы может быть настроено производителем транспортного средства или дилером, также владелец транспортного средства может сам настроить группы функций отправления и прибытия, на основании собственных предпочтений. Разделение функций на два или более групп позволит сократить время обработки данных на последующих этапах за счет уменьшения количества доступных для выбора функций.
На этапе 215 система 100 может выполнять мониторинг ситуативных переменных, генерируемых стандартными датчиками 135 и ситуативными модулями 120. Как было сказано выше, ситуативные переменные могут быть простыми ситуативными переменными, полученными непосредственно от датчиков транспортного средства, или интеллектуальными ситуативными переменными, полученными путем объединения других ситуативных переменных (простых или интеллектуальных) для получения значений, которые не могут быть сразу получены транспортным средством. На этапе 220 система 100 также может проверять необходимость приема внешних данных от внешнего хранилища 130 данных. Такая ситуация может возникнуть в том случае, когда ситуативные переменные используют сохраненную информацию, например, ограничения скорости движения, данные о местоположении или предпочтительная температура в салоне. При наличии необходимости в дополнительных внешних данных эта информация может быть передана на ситуативные модули 120, что позволит им сгенерировать интеллектуальную ситуативную переменную. Если же дополнительные внешние данные не нужны или уже были получены, то способ 200 может перейти на этап 225.
На этапе 225 ситуативные переменные могут быть переданы на процессор 115, который сгенерирует оценочное значение функции. Для получения оценочного значения процессор 115 может объединять принятые входные данные (например, ситуативные переменные) и сопоставлять полученные значения с каждой выбираемой опцией. Оценочные значения функции могут быть сгенерированы путем объединения ситуативных переменных путем их перемножения, усреднения, определения максимального значения и (или) определения минимального значения или любого их сочетания, а также с помощью других нелинейных алгоритмов, таких как нечеткая логика. Оценочное значение функции может быть прямо пропорционально уровню актуальности (релевантности) объединения ситуативных переменных, переданных на процессор 115. Например, когда ситуативные переменные указывают на то, что транспортное средство движется по шоссе со скоростью, близкой к предельному значению, но при этом скорость транспортного средства становится то ниже, то выше предельного значения (что наблюдается, например, при интенсивном движении), оценочное значение функции для выбираемой опции круиз-контроля будет иметь относительно низкое значение по сравнению с ситуацией, когда транспортное средство движется с постоянной скоростью, близкой к предельному значению, на протяжении длительного периода времени. Кроме того, те же переменные, соответствующие, например, выбираемой опции автоматической парковки, могут иметь очень низкое оценочное значение, поскольку вероятность парковки во время движения с высокой скоростью крайне мала.
На этапе 230 процессор 115 может определять приоритет выбираемых опций на основании их соответствующих оценочных значений функций. В общем случае выбираемые опции с наибольшим оценочным значением могут иметь самый высокий приоритет, при этом остальные доступные выбираемые опции будут оцениваться соответствующим образом относительно данного значения. В зависимости от предпочтений пользователя на этапе 235 функция с наибольшим оценочным значением или несколько функций (например, три функции с наибольшими оценочными значениями) могут получить более высокий приоритет для отображения на интерфейсе 105. Аналогичным образом при снижении актуальности отображаемых функций на пользовательском интерфейсе 105 при определенной ситуации движения они могут быть скрыты (или удалены). В качестве альтернативы или дополнения процессор 115 или контроллер 110 может упорядочить выбираемые опции в соответствии с оценочными значениями для функций, соответствующих каждой выбираемой опции. Затем контроллер 110 может определить порядок выбираемых опций, оценочные значения которых превышают заранее заданное пороговое значение. Например, контроллер 110 может выбирать только опции с оценочным значением, равным или превышающим 0,7. Затем контроллер 110 может установить доступные выбираемые опции с наибольшим оценочным значением на первое место, а другие выбираемые опции с относительно меньшим оценочным значением на второе место и т.д.
На этапах 215-225 данный цикл выполняется непрерывно до тех пор, пока транспортное средство продолжает работать. Стандартные датчики 135 и ситуативные модули 120 всегда активны и непрерывно передают информацию на процессор, который непрерывно генерирует новые оценочные значения для функций. Таким образом, на этапе 230 процессор 115 обновляет приоритеты таким образом, чтобы на этапе 235 наиболее актуальные функции всегда отображались на пользовательском интерфейсе 105.
В соответствии с одним вариантом осуществления система 100 пользовательского интерфейса может определять выбираемую опцию на основании принимаемых входных данных от датчиков и данных о местоположении. Данные о местоположении могут включать в себя предыдущие места остановок и количество циклов использования функций, основанных на определении местоположения. Выбираемая опция может быть обычно активирована на основании местоположения транспортного средства относительно других известных или ранее обнаруженных мест. Например, в настоящем описании представлены система и способ генерирования выбираемых опций для автоматической парковки и режима парковщика, которые активируются при приближении к определенным местам (например, к парковке, офисному зданию или ресторану). Доступная функция автоматической парковки, которая активирует систему транспортного средства для парковки в автоматическом режиме. Другими словами, транспортное средство может самостоятельно выполнять руление при параллельной или перпендикулярной парковке на парковочном месте практически без помощи водителя. Режим или опция парковщика является аналогичной функцией, которая активируется рядом с определенными местами, например, рядом с отелями, ресторанами, барами и т.д., на территории которых предоставляются услуги парковщика. Активация системы транспортного средства для опции режима парковщика может блокировать компоненты транспортного средства (например, пользовательский интерфейс, перчаточный ящик, багажник), чтобы парковщик не мог получить доступ к личной информации, которая может храниться в транспортном средстве. Опция парковщика может начинать использоваться контроллером 110 при приближении к месту, где предоставляются услуги парковщика. Данная информация может быть получена на основании данных об определенном месте, хранящихся на внешнем хранилище 335 данных.
Опции, основанные на местоположении, могут учитывать нормированную частоту использования некоторой функции для определения количества циклов активации выбираемой опции в конкретном месте. Нормированная частота использования может быть определена контроллером 110. Значение нормированной частоты (FAF(i,j)) использования может быть получено с помощью двухуровневого способа. Изначально, когда количество визитов или измерений ограничено, действительное значение нормированной частоты генерируется с помощью первого уровня. Другими словами, до достижения заранее заданного минимального количества (Nmin) визитов в определенное место общее количество циклов использования некоторой функции в определенном месте делят на общее число визитов в данное место и получают действительное количество циклов активации некоторой функции в определенном месте. Минимальное пороговое значение можно использовать для того, чтобы увеличить выборку для количества циклов активации некоторой функции в определенном месте и получить более точное значение в процентах. Минимальное количество визитов может представлять собой значение, записанное на внешнем хранилище 335 данных, при этом оно может быть установлено производителем транспортного средства, дилером или даже водителем.
Режим определения действительного значения (процентного значения) количества циклов использования некоторой функции в определенном месте может быть применен при расчете фактического значения циклов активации некоторой функции в определенном месте. Значение N(i,j)a характеризует количество циклов активации некоторой функции в определенном месте, например, количество циклов, когда функция автоматической парковки использовалась в определенном месте, например, в супермаркете. Например, пусть i будет соответствовать определенному месту, a j - функции. N(i)all представляет собой общее количество визитов в место i. Действительное значение можно вычислить с помощью следующей формулы: FAF(i,j)-N(i,j)a/N(i)all.
Если общее количество визитов в определенное место равно или больше заданного минимального значения, то способ переходит на второй уровень. На втором уровне способа используется рекурсивная формула, которую можно использовать для оценки нормированной частоты (FAF(i,j)) использования в режиме реального времени без необходимости получения особых данных, например, количества циклов активации некоторой функции в определенном месте. На втором уровне используется скорость обучения, которая может зависеть от глубины памяти внешнего хранилища 335 данных, и сигнал усиления, величина которого может постепенно увеличиваться вместе с количеством циклов активации некоторой функции в определенном месте. Нормированная частота использования может быть рассчитана в режиме реального времени по следующей формуле: FAF(i,j)=(1-α)*FAF(i,j-1)+(α)*Sigreinforce(i,j), где α - скорость обучения (например, в диапазоне от 0 до 1, при этом «1» соответствует самой высокой скорости), FAF(i,j) - нормированная частота использования функции j в месте i, как было описано выше, a Sigreinforce(i,j) - сигнал усиления, представляющий собой функцию j, активируемую в месте i (например, в диапазоне от 0 до 1, при этом «1» соответствует самому сильному сигналу).
Переключение на вторую, рекурсивную формулу помогает решить две проблемы. Во-первых, формула позволяет уменьшить объем используемой памяти, поскольку во второй формуле для определения нормированной частоты использования не применяется значение N(i)all или N(i,j)a. Это не только освобождает память, но и увеличивает быстродействие. Аналогичным образом, режим реального времени позволяет получить более надежные выходные данные, поскольку минимальный пороговый уровень активаций в определенном месте будет пройден, указывая на предпочтение водителя использовать определенную функцию чаще в определенном месте. Также вторая формула учитывает наиболее актуальные данные об использовании функции водителем при изменении его предпочтений. Значение скорости (а) обучения может изменяться в соответствии с наиболее актуальными действиями водителя при использовании некоторой функции в разных местах.
На фиг. 7 показаны опции, основанные на местоположении (например, автоматическая парковка, режим парковщика, управление воротами гаража и т.д.), которые могут быть активированы при приближении или выезде транспортного средства из определенного места. В общем случае во внешнем хранилище 335 данных для каждого места может быть предусмотрена отдельная запись, соответствующая данному месту. На внешнем хранилище 335 данных может быть записана долгота и широта каждого определенного места (например, дома, офиса, ресторана, расположенного рядом с офисом, и т.д.). Каждая запись, соответствующая определенному месту, также может включать в себя поле, характеризующее нормированную частоту использования некоторых функций в данном месте. В качестве альтернативы или дополнения каждая запись может быть сохранена в одну или обе группы прибытия и отправления, в результате чего может быть создано две записи, связанные с определенным местом. Таким образом, функции, используемые в начале ездового цикла и в конце ездового цикла, могут быть разными, что позволит обеспечить более точное и своевременное прогнозирование полезности каждой функции для водителя.
Каждый элемент в поле представляет собой нормированную частоту использования некоторой функции (например, круиз-контроля, управления воротами гаража, активации сигнализации в доме, автоматической парковки, режима парковщика, настройки температуры в салоне и т.д.). Например, в записи группы прибытия домой, поле может содержать нормированную частоту использования круиз-контроля, автоматической парковки, настройки температуры в салоне и т.д. Если функция (или выбираемая опция) ни разу не была активирована в определенном месте, то нормированная частота использования может быть низкой или вообще может отсутствовать в поле. Например, нормированная частота использования выбираемой опции круиз-контроля рядом с домом может быть равна 0,00. С другой стороны, поле для выбираемой опции управления воротами гаража может высокое значение нормированной частоты использования в зависимости от количества циклов активации выбираемой опции или скорости обучения для выбираемой опции. Нормированная частота использования для каждой функции может быть установлено один раз или может обновляться при обнаружении изменений предпочтений водителя или пассажиров.
На фиг. 4 представлен вариант осуществления системы 300 генерирования оценочного значения функции для выбираемой опции. Система может включать в себя пользовательский интерфейс 305, контроллер 310, имеющий процессор 315, ситуативные модули 320, 325 и 330, а также несколько датчиков 340 и 345, передающих входные сигналы для контроллера 310. Стандартные датчики 340, 345 и ситуативные модули 320, 325 и 330 собирают данные о переменных значениях и передают их на процессор, который генерирует оценочное значение функции для каждой выбираемой опции. Оценочное значение функции может быть использовано при определении наиболее актуальной выбираемой опции с учетом текущей ситуации движения. Система 300 также может включать в себя данные о местоположении, которые хранятся во внешнем хранилище 335 данных и могут включать в себя, например, предыдущие места остановки транспортного средства, количество циклов активации функций автоматической парковки и режима парковщика для каждого предыдущего места остановки, а также интересующие пользователя места (POI). Обновление данных о местоположении, хранящихся на внешнем запоминающем устройстве, может выполняться по истечении определенного периода времени. Например, внешнее хранилище 335 данных может хранить данные о предыдущих местах остановки только за последние 30, 60 или 90 дней. Это может быть полезным при отслеживании наиболее актуальных предпочтений водителя, а также может уменьшить объем памяти, используемый для хранения данных о важных местах.
В соответствии с одним вариантом осуществления система 300 может генерировать выбираемую опцию для автоматической парковки. Как было сказано выше, датчик 340 положения и датчик 345 скорости движения могут обмениваться данными с контроллером, используя интерфейс. Датчик 345 скорости движения транспортного средства может включать в себя спидометр, датчик положения трансмиссии/рычага переключения передач или датчик колеса/оси, который регистрирует вращение колеса/оси. Датчик 340 положения транспортного средства может представлять собой датчик системы глобального позиционирования (GPS-датчик), способный определять местоположение транспортного средства, а также устройство радиочастотной идентификации (RFTD), использующее электромагнитные поля радиочастотного диапазона, GPS-устройство сотового телефона или карманного персонального компьютера (КПК), которое передает сигналы, например, по каналу связи Bluetooth®.
Каждый ситуативный модуль 320, 325 и 330 в контроллере 310 может выполнять определенную функцию. Хотя описанные конкретные функции приведены лишь в качестве примера, все или некоторые из этих функций могут быть выполнены с помощью одного модуля. Третий ситуативный модуль 330 может быть выполнен с возможностью приема данных о местоположении транспортного средства от датчика 340 положения транспортного средства и данных о предыдущих местах остановки от внешнего хранилища 335 данных. На основании этих входных данных, поступающих от датчиков, третий модуль 330 может определить место остановки (например, какую-либо организацию), находящееся рядом с текущим местоположением транспортного средства.
Первый ситуативный модуль 320 может быть выполнен с возможностью приема от третьего ситуативного модуля 330 данных о месте остановки. Он также может определять количество циклов использования некоторой функции в определенном месте. Например, первый модуль 320 может определять количество циклов активации функции автоматической парковки рядом с определенной организацией. Как было сказано выше, данная информация может быть сохранена в виде записи о некотором местоположении на внешнем хранилище 335 данных и может быть использована для определения нормированной частоты использования функции в определенном месте (с помощью формулы определения действительного значения или с помощью формулы определения значения в режиме реального времени). Например, количество циклов активации функции автоматической парковки в определенном месте может быть представлено в виде входного сигнала N(i,j)a, а число визитов в ближайшее место предыдущей остановки может быть представлено в виде входного сигнала N(i)all в формуле определения действительного значения. С другой стороны, в качестве входных данных для первого ситуативного модуля 320 при определении значения в режиме реального времени может понадобиться только предыдущее место остановки, на основании чего для доступных выбираемых опций будет получено значение нормированной частоты использования. Первый ситуативный модуль 320 может быть выполнен с возможностью выдавать значение нормированной частоты использования в качестве входных данных для процессора 315 для генерирования оценочного значения функций для выбираемой опции и выдавать значение нормированной частоты использования на внешнее хранилище 335 данных для обновления записи для определенного местоположения.
Для определения расстояния до ближайшего интересующего места второй ситуативный модуль 325 может быть выполнен с возможностью приема данных о местоположении транспортного средства от датчика 340 положения и приема данных о ближайшем месте остановки транспортного средства от третьего ситуативного модуля 330. В соответствии с одним подходом датчик 345 скорости движения может обмениваться данными непосредственно с процессором 315. Выходные данные первого и второго ситуативных модулей 320 и 325 и данные о скорости движения транспортного средства от датчика 345 скорости движения затем могут быть переданы на процессор 315, который присвоит соответствующие значения для выбираемой опции автоматической парковки. Затем процессор 315 может сгенерировать оценочное значение функции, соответствующей выбираемой опции автоматической парковки, на основании полученных переменных значений и отобразить выбираемую опцию автоматической парковки пользователю с помощью пользовательского интерфейса 305.
В качестве альтернативы или дополнения система 300 может создавать выбираемую опцию/режим парковщика. Работа системы 300 во многом аналогична использованию выбираемой опции автоматической парковки, за исключением наличия интересующих мест (POI) для режима парковщика. Интересующие места для режима парковщика содержат информацию о наличии услуг парковщика в указанном месте. Интересующие места для режима парковщика могут быть указаны в базе данных бортовой карты, сохраненной в виде данных о местоположениях во внешнем хранилище 335 данных или в виде сетевого сервиса (например, использующего облачные вычисления). Интересующие места для режима парковщика могут быть определены с помощью данных, получаемых непосредственно от внешнего хранилища 335 данных (например, внешнего хранилища 335 данных, хранящего информацию о местах, в которых предоставляются услуги парковщика), или с помощью анализа названия места, сохраненного во внешнем хранилище 335 данных. Например, такие ключевые слова, как «конференц-зал», «отель» или «ресторан» могут указывать на то, что в этих местах, скорее всего, предоставляются услуги парковщика. Если интересующие места для режима парковщика еще не сохранены во внешнем хранилище 335 данных или название места не указывает на наличие услуг парковщика, то активация выбираемой опции режима парковщика может обновить данные во внешнем хранилище 335 данных, чтобы указать наличие услуг парковщика в данном месте. Интересующие места для режима парковщика могут изменять оценочное значение функции для опции режима парковщика таким образом, что в случае отсутствия услуг парковщика в некотором месте соответствующая функция потеряет актуальность (и получит низкое оценочное значение функций).
На фиг. 5 представлен способ 400 генерирования оценочного значения функции, связанное с выбираемой опцией. Следующая информация будет рассмотрена на примере опции автоматической парковки. Сначала на этапе 405 может быть определено текущее местоположение транспортного средства. Для этого может быть использован датчик 340 положения транспортного средства. На этапе 410 информация, полученная датчиком 340 положения транспортного средства, может быть передана непосредственно на третий ситуативный модуль 330. Для определения ближайшего места остановки, где транспортное средство ранее уже совершало остановку, третий ситуативный модуль 330 сравнивает текущее местоположение с предыдущими местами остановок, сохраненными в хранилище 335 данных. Например, для определения ближайшего места остановки (например, на основании расстояния между текущим местоположением и местом остановки, данные о котором хранятся в хранилище 335 данных) третий ситуативный модуль 330 может объединять данные о текущем положении транспортного средства, переданные датчиком 340 положения транспортного средства, и данные о предыдущих местах остановок, переданные внешним хранилищем 335 данных.
На этапе 415 третий ситуативный модуль 330 может передавать данные о ближайшем месте остановки на первый ситуативный модуль 320. Первый ситуативный модуль может считывать из хранилища 335 данных информацию о ближайшем месте предыдущей остановки. Данная информация может включать в себя значение счетчика, указывающее количество активаций определенной функции в конкретном месте, например, функции автоматической парковки. В свою очередь это значение может быть использовано первым ситуативным модулем 320 для расчета нормированной частоты использования, как было описано выше. Например, первый ситуативный модуль 320 также может принимать от внешнего хранилища 335 данных информацию о количестве циклов активации выбираемой опции (или функции) в определенном месте. Внешнее хранилище 335 данных может содержать информацию о том, что выбираемая опция автоматической парковки была активирована семь раз у супермаркета, расположенного рядом с домом водителя. Если общее число визитов в ближайшее место остановки не превышает заранее заданного минимального значения визитов (например, N(i)all≤Nmin), то ситуативная переменная, указывающая действительную частоту использования функции автоматической парковки в данном месте, будет сгенерирована в режиме определения действительного значения (на этапе 425). С другой стороны, после достижения минимального числа визитов (например, N(i)all>Nmin) интеллектуальная ситуативная переменная, характеризующая нормированную частоту использования функции в данном месте, будет сгенерирована в режиме реального времени. В зависимости от значения, полученного с учетом усиления сигнала (Sigreinforce(i,j)) и скорости (α) обучения, ситуативная переменная, сгенерированная первым ситуативным модулем 320, может иметь более высокое (например, близкое к 1) или более низкое значение.
Для расчета расстояния между текущим положением и предыдущим местом остановки на этапе 435 второй ситуативный модуль 325 может принимать входные данные от датчика 340 положения транспортного средства и данные о ближайшем месте остановки от третьего ситуативного модуля 330. Чем меньше расстояние от транспортного средства до ближайшего места остановки, тем больше значение интеллектуальной ситуативной переменной. Затем на этапе 440 датчик 345 скорости движения транспортного средства определяет текущую скорость движения транспортного средства. Простая ситуативная переменная, выдаваемая датчиком 345 скорости движения, обратно пропорциональна скорости движения транспортного средства. Например, если скорость движения транспортного средства равна 40 миль/ч, то вероятность остановки транспортного средства (следовательно, и вероятность использования опции автоматической парковки) мала.
На этапе 445 ситуативные переменные, выдаваемые первым ситуативным модулем 320, вторым ситуативным модулем 325 и датчиком 345 скорости движения транспортного средства могут передаваться на процессор 315. На этапе 450 процессор 315 присваивает полученные значения выбираемым опциям. Как было сказано выше, если выбираемые опции делятся на группу функций прибытия и группу функций отправления, то ситуативные переменные могут использоваться в качестве входных данных только для выбираемых опций для группы функций прибытия. Они могут быть определены как функции, используемые по истечении некоторого времени и перемещения на некоторое расстояние после активации водителем зажигания в транспортном средстве. Для получения оценочного значения функции (этап 455) может быть выполнено объединение переменных. Эвристический алгоритм, применяемый при объединении значений, может быть реализован различными способами, к которым можно отнести, не ограничиваясь этим, перемножение, усреднение, определение минимального значения или определение максимального значения. Для получения оценочного значения функции для выбираемых опций на этапе 455 процессор 315 может перемножить выходные переменные значения первого ситуативного модуля 320, второго ситуативного модуля 325 и датчика 345 скорости движения транспортного средства.
На этапе 460 процессор 315 может выбрать опцию автоматической парковки в том случае, если оценочное значение функции превышает значения для других доступных выбираемых опций. На этапе 465 процессор 315 может увеличить приоритет отображения функции на пользовательском интерфейсе 305. В то же время процессор может перестать отображать на пользовательском интерфейсе 305 функцию, которая больше не является актуальной в данных условиях.
На фиг. 6 представлен способ 500 генерирования выбираемой опции для режима парковщика и увеличения приоритета отображения данной опции на пользовательском интерфейсе 305. На этапе 505 датчик 340 положения транспортного средства может определять текущее местоположение транспортного средства. Для определения относительного положения на основании текущего местоположения транспортного средства на этапе 510 из внешнего хранилища 335 данных может быть получена информация о предыдущих местах остановок и интересующих местах для режима парковщика. Внешнее хранилище 335 данных может передавать данные о местоположении на третий ситуативный модуль 330. Для определения ближайшего места остановки, в котором предоставляются услуги парковщика, на этапе 515 третий ситуативный модуль 330 может объединять данные о местоположении, полученные внешним хранилищем 335 данных, с данными о местоположении транспортного средства от датчика 340 положения транспортного средства. Как было сказано выше, интересующие места для режима парковщика могут быть получены непосредственно от внешнего хранилища 335 данных или могут быть определены на основании анализа названий мест (например, ресторан, кинотеатр, конференц-зал).
На этапе 520 данные о ближайшем месте остановки могут быть переданы на первый ситуативный модуль 320 для определения нормированной частоты использования режима парковщика в определенном месте. Например, если ближайшим местом остановки является ресторан, расположенный рядом с офисом водителя, то это место будет использовано в формуле нормированной частоты использования в качестве входного значения (i), а режим парковщика - в качестве входного значения (j). Если минимальное количество визитов до перехода в режим реального времени не превысило общего количества визитов (например, N(i)all≤Nmin), то на этапе 530 будет рассчитана действительная частота использования. С другой стороны, если количество визитов в место (i) достигло заранее заданного минимального значения, то на этапе 535 частота использования может быть рассчитана с помощью рекурсивной формулы в режиме реального времени. Вне зависимости от используемой формулы первый ситуативный модуль 320 будет выдавать интеллектуальную ситуативную переменную для нормированного количества циклов активации функции режима парковщика. Если нормированное количество циклов использования выбираемой опции для режима парковщика является большим, то вероятность активации функции также будет высока, соответственно, высокое значение будет присвоено и интеллектуальной ситуативной переменной.
Для определения расстояния до ближайшего места предыдущей остановки на этапе 545 второй ситуативный модуль 325 может принимать данные о местоположении транспортного средства от датчика 340 положения транспортного средства и данные о ближайшем месте предыдущей остановки от третьего ситуативного модуля 330. Если расстояние до ближайшего места предыдущей остановки, в котором предоставляются услуги парковщика, является небольшим, то вероятность выбора функции режима парковщика будет высока (так же, как и значение интеллектуальной ситуативной переменной). Кроме того, на этапе 545 датчик 345 скорости движения транспортного средства определяет скорость движения транспортного средства. При низкой скорости движения транспортного средства вероятность остановки транспортного средства в ближайшее время будет высока.
На этапе 550 на процессор 315 поступают значения скорости движения транспортного средства, нормированной частоты использования и расстояния до ближайшего места. На этапе 555 процессор 315 может присваивать соответствующие значения доступным выбираемым опциям. Затем процессор 315 может сгенерировать оценочное значение функции для каждой выбираемой опции на основании объединения значений, принятых на этапе 555. Процессор 315 может дополнительно назначить приоритеты выбираемым опциям, значения которых превышают минимальное пороговое значение. Выбираемой опции с наибольшим оценочным значением может быть присвоен самый высокий приоритет, а выбираемой опции со вторым по величине оценочным значением может быть назначен второй по величине приоритет и т.д. Если оценочное значение для опции режима парковщика является наибольшим, то она получит самый высокий приоритет, после чего процессор 315 может выбрать опцию режима парковщика (на этапе 565) и отобразить ее на пользовательском интерфейсе 305 (на этапе 570). В качестве альтернативы процессор 315 может выбрать несколько выбираемых опций, которые имеют первый, второй приоритет и т.д. и отобразить их на пользовательском интерфейсе 305. Процессор 315 также может удалить выбираемую опцию с низким оценочным значением при текущей ситуации движения, чтобы гарантировать возможность отображения опции с наибольшим оценочным значением на пользовательском интерфейсе 315.
На фиг. 8 и 9 оценочное значение функции, соответствующей выбираемым опциям для различных мест остановки (например, автоматическая парковка или режим парковщика), может быть основано по крайней мере на трех правилах «если, то». Если значение нормированной частоты использования опции автоматической парковки или режима парковщика, выдаваемое первым ситуативным модулем 320, является высоким, то вероятность (так же, как и значение выходной ситуативной переменной) использования соответствующей опции также может быть высокой. На фиг. 8 изображена зависимость оценочных значений для функций от расстояния между текущим местоположением транспортного средства и определенным местом. На фиг. 8 показано, что при небольшом (например, менее 500 метров) расстоянии до определенного места (представленного в виде выходного значения второго ситуативного модуля 325) вероятность остановки транспортного средства будет высока. На фиг. 9 изображена зависимость оценочных значений функции от скорости движения транспортного средства. На фиг. 9 показано, что при низкой скорости движения транспортного средства (представленной в виде выходного значения датчика 345 скорости движения транспортного средства) вероятность остановки транспортного средства будет высока. Для определения оценочного значения функции процессор 315 выполняет объединение этих значений. Таким образом, высокое оценочное значение зависит от всех трех указанных значений.
В соответствии с одним примером, если расстояние до ближайшего места предыдущей остановки является небольшим, а нормированная частота использования функции - высокой, но скорость движения транспортного средства равна 45 миль/ч, то вероятность остановки транспортного средства будет очень мала. Следовательно, низким будет оценочное значение функции, например, для функции автоматической парковки или режима парковщика, в результате чего пользовательский интерфейс не будет отображать данные опции. Аналогичным образом, если расстояние от транспортного средства до места предыдущей остановки является небольшим, а скорость движения - низкой, но конкретная функция ни разу не активировалась в данном месте, то нормированная частота использования будет низкой, как и вероятность активации данной функции (например, оценочное значение функции).
На фиг. 10 представлен пример схемы генерирования оценочного значения функции парковки. Схема является примерной и предназначена для наглядного изображения того, как конечное местоположение 810, места 815 предыдущих остановок и место 820 парковки, определенное на основании внешних данных, могут быть использованы при анализе использования функции парковки в системе 100 интерфейса. Введенные местоположения 810 могут быть введены пользователем с помощью навигационной системы.
Место 815 предыдущей остановки может представлять собой местоположение, в котором обычно используется данная функция парковки. Например, при визите в банк водитель может обычно выбирать выполнение параллельной парковки с помощью системы автоматической парковки. При каждом использовании некоторой функции в определенном месте значение счетчика циклов использования для данного места, может увеличиваться и сохраняться в виде данных о конечном местоположении в хранилище 130 данных. В качестве дополнения, если некоторая функция не выбирается в определенном месте, то значение счетчика циклов использования может уменьшаться. Счетчик циклов использования может быть сопоставлен с определенным конечным местоположением, например, с адресом. Однако он может быть сопоставлен с каким-либо географическим местоположением (например, с определенными географическими координатами). Другими словами, место 815 предыдущей остановки может быть сопоставлено с адресом конечного местоположения (например, с адресом банка) и (или) место предыдущей остановки может представлять собой географическое местоположение парковки (например, географические координаты парковочного места перед банком). Для увеличения/уменьшения значения счетчика использования циклов может быть использован фильтр нижних частот. Например, вектор частот может представлять собой список часто посещаемых водителем мест. При обнаружении посещения водителем определенного места значение в векторе частот, сопоставленное с данным местом, будет увеличено с помощью фильтра нижних частот на величину усиливающего сигнала (равного единице), при этом остальные значения в векторе уменьшатся на соответствующие величины сигналов усиления (равных нулю). В соответствии с данным примером из-за того, что сигналы усиления могут принимать значения 1 или 0, то содержание вектора частот будет изменяться между 0 и 1, указывая предпочтительные пункты назначения для водителя. Кроме того, значение счетчика циклов использования может храниться вне хранилища 130 данных. Таким образом, конечное местоположение может представлять собой прогнозируемое местоположение, полученное на основании предыдущего поведения пользователя/транспортного средства.
Как было сказано выше, место 820 парковки, определенное на основании внешних данных, может представлять собой парковочную площадку (например, организованную парковку или парковочное место), расположенную рядом с определенным местом (например, стадионом, рестораном и т.д.). Данная информация может быть получена из хранилища 130 данных или из таких внешних источников, как карта или общедоступная база данных. В качестве дополнения ситуативный модуль 120, 125 может определить и идентифицировать несколько введенных мест 810, мест 815 предыдущих остановок и мест 820 парковки, определенных на основании внешних данных. До запоминания определенного места водителю может быть выдан запрос подтверждения сохранения данных о данном месте. Другими словами, до того как место станет предпочтительным или запомненным местом, водитель должен будет ввести соответствующее подтверждение. Аналогичным образом водитель может удалять местоположение и данные о нем. Таким образом, водитель может удалить местоположения, которые перестают быть для него интересными.
При движении транспортного средства по маршруту текущее местоположение (т.е. ситуативная переменная), определяемое, например, ситуативным модулем 120, 125 с помощью GPS-системы, может периодически или по мере необходимости сравниваться с одним или всеми прогнозируемыми конечными местоположениями, Расстояние между прогнозируемыми конечными местоположениями и текущим местоположением может быть определено с помощью ситуативного модуля 120. После вычисления расстояния в качестве конечного местоположения может быть выбрано самое ближнее место из прогнозируемых конечных местоположений (например, из введенного местоположения 210, места 815 предыдущей парковки и места 820 парковки, определенного на основании внешних данных). В некоторых конфигурациях введенное местоположение по умолчанию может представлять собой конечное местоположение, а ситуативный модуль 120, 125 может не рассчитывать расстояние между текущим местоположением и конечным местоположением. Однако в некоторых конфигурациях, когда конечное местоположение отдельно вводится пользователем в навигационную систему, парковочное место или площадка может быть более подходящим конечным местоположением и, следовательно, расстояние может быть рассчитано для определения конечного местоположения. В соответствии с одним примером, при приближении транспортного средства к ресторану, адрес которого мог быть предварительно введен пользователем, транспортное средство может поехать на парковочное место у ресторана. В данном случае в качестве конечного местоположения может использоваться парковочное место, а не адрес ресторана.
Как было сказано выше, при наличии нескольких прогнозируемых конечных местоположений данные местоположения могут быть объединены и сравнены друг с другом, что позволит определить, какое из них является самым близким к текущему местоположению. После выбора конечного местоположения ситуативный модуль 120, 125 может принимать простую ситуативную переменную от стандартных датчиков 135, 140, например, скорость движения транспортного средства. Процессор 115 может присвоить оценочное значение для текущей ситуации движения на основании скорости движения транспортного средства, расстояния между текущим местоположением и выбранным местоположением, а затем может увеличить значение счетчика циклов использования, соответствующего выбранному местоположению. Например, если транспортное средство движется с низкой скоростью рядом с местоположением, в котором транспортное средство обычно паркуется, функции парковки может быть присвоено высокое оценочное значение, после чего она отобразится на интерфейсе 105 как выбираемая опция. С другой стороны, если транспортное средство движется с низкой скоростью, но рядом нет конечного местоположения или предыдущего места парковки, то оценочное значение функции может быть низким.
На фиг. 11-13 представлены примеры графиков данных, на которых показаны ситуативные переменные, используемые системой интерфейса при генерировании оценочных значений функции. На фиг. 11 показан пример графика данных о местоположении. График данных о местоположении может содержать значения широты и долготы, маршрут транспортного средства, обозначенного сплошной линией. Кроме того, кругами могут быть обозначены различные конечные местоположения. На фиг. 12 на графике представлена зависимость скорости движения транспортного средства от времени. Зная расстояние между текущим местоположением транспортного средства и указанным конечным местоположением и заданную скорость движения транспортного средства, контроллер 110 может определить оценочное значение функции, соответствующее текущей ситуации движения. На фиг. 12 представлен пример оценочных значений функции. В момент, соответствующий примерно 50 секундам, оценочное значение функции примерно равно 0,9. В момент, соответствующий примерно 450 секундам, оценочное значение функции примерно равно 0,85. Данные высокие оценочные значения соответствуют небольшому расстоянию между текущим местоположением транспортного средства и известным конечным местоположением, а также очень низкой скорости движения транспортного средства. С другой стороны, между моментами времени, соответствующими 50 секундам и 450 секундам, оценочное значение функции может быть низким, поскольку вне зависимости от скорости движения транспортного средства оно не приближается и не находится рядом с конечными местоположениями. Более того, между моментами времени, соответствующими примерно 550 секундам и 675 секундам, оценочное значение функции может увеличиться до уровня 0,35. В данном случае скорость движения транспортного средства может снизиться, однако расстояние от текущего местоположения транспортного средства до любого известного конечного местоположения будет достаточно большим.
На фиг. 14 представлена блок-схема способа 400, используемого системой интерфейса. Способ 1000 может начинаться с этапа 1005, на котором работа системы 100 пользовательского интерфейса может активироваться автоматически не позднее, чем будет включено зажигание транспортного средства. В этот момент транспортное средство может выполнять внутреннюю проверку системы, в которой определяется состояние готовности одной или нескольких систем и (или) подсистем транспортного средства, что позволит удостовериться в готовности транспортного средства к работе. После прохождения внутренней проверки системы система 100 также может определить текущее местоположение транспортного средства. После активации системы способ может вернуться на этап 1010.
На этапе 1010 ситуативный модуль 120, 125 может принимать информацию о местоположении (т.е. простую ситуативную переменную) от одного из ситуативных модулей 120, 125. Как было сказано выше, информация о местоположении может включать в себя одно или несколько прогнозируемых конечных местоположений. Данные конечные местоположения могут быть определены на основании введенной пользователем информации (например, адреса, введенного в навигационную систему) или спрогнозированы на основании предыдущего поведения пользователя/транспортного средства. После прогнозирования конечных местоположений принятая информация о местоположении может включать в себя список прогнозируемых конечных местоположений. Например, конечное местоположение может включать в себя несколько ранее использованных парковочных мест, которые ситуативный модуль 120, 125 может добавить в информацию о местоположении, основанную на маршруте, по которому движется транспортное средство. После получения информации о местоположении способ 400 может вернуться на этап 1015.
На этапе 1015 ситуативный модуль 120, 125 может определять конечное местоположение (т.е. интеллектуальную ситуативную переменную) на основании прогнозируемых конечных местоположений. В зависимости от конфигурации процессор 115 может определять конечное местоположение на основании заранее заданной иерархии, например, всегда выбирать местоположение, введенное пользователем, а не прогнозируемое местоположение, а также может объединять прогнозируемые конечные местоположения и выбирать возможное местоположение, расположенное на минимальном расстоянии от текущего местоположения транспортного средства. В последней конфигурации процессор 115 должен получать информацию о текущем местоположении транспортного средства от стандартного датчика 135, 140. Один из ситуативных модулей 120, 125 в процессоре 115 может определять расстояние между текущим местоположением и каждым прогнозируемым конечным местоположением. На основании данных расстояний в качестве конечного местоположения может быть выбрано местоположение, находящееся ближе всего к текущему местоположению. Как было сказано выше, данный анализ может не понадобиться в том случае, когда пользователь вводит конечное местоположение с помощью навигационной системы на интерфейсе 105. После определения конечного местоположения способ 1000 переходит на этап 1020.
На этапе 1020 ситуативный модуль 120, 125 может принимать данные о конечном местоположении, включая счетчик циклов использования (т.е. интеллектуальную ситуативную переменную), для конечного местоположения. Эти данные могут быть считаны из хранилища 130 данных или другого внешнего источника. Счетчик циклов использования может содержать информацию о количестве циклов использования некоторой функции в определенном конечном местоположении. Способ 1000 переходит на этап 1025.
На этапе 1025 ситуативный модуль 120, 125 может принимать данные о текущей скорости движения транспортного средства (т.е. простую ситуативную переменную) от стандартного датчика 135, 140. Ситуативные модули 120, 125 могут принимать значение скорости движения и выдавать его на процессор 115. Способ 1000 может перейти на этап 1030.
На этапе 1030 ситуативные переменные, включая конечное местоположение и скорость движения транспортного средства, могут быть переданы на процессор 115, который сгенерирует оценочное значение функции. Процессор 115 может объединять принятые ситуативные переменные и сопоставлять данные значения с определенной функцией (функциями). Оценочные значения функции могут быть сгенерированы путем объединения ситуативных переменных путем их перемножения, усреднения, определения максимального значения и (или) определения минимального значения, или любого их сочетания, а также с помощью других нелинейных алгоритмов, таких как нечеткая логика или нейронные сети. Оценочное значение функций может быть прямо пропорциональным актуальности объединения ситуативных переменных, передаваемых процессору 115. Например, если транспортное средство находится рядом с конечным местоположением, где обычно используется система автоматической парковки, то оценочное значение функции для выбираемой опции, соответствующей функции автоматической парковки, будет больше, чем если бы транспортное средство находилось далеко от конечного местоположения и двигалось с высокой скоростью. Способ 1000 переходит на этап 1045.
На этапе 1045 процессор 115 может определять приоритет выбираемых опций на основании их оценочных значений функции. В общем случае выбираемые опции с наибольшим оценочным значением могут иметь самый высокий приоритет, при этом остальные доступные выбираемые опции будут оцениваться соответствующим образом относительно данного значения. В зависимости от предпочтений пользователя на этапе 1040 функция с наибольшим оценочным значением или несколько функций (например, три функции с наибольшими оценочными значениями) могут получить более высокий приоритет для отображения на интерфейсе 105. Аналогичным образом при снижении актуальности отображаемых функций на пользовательском интерфейсе 105 при определенных условиях движения они могут быть скрыты (или удалены). В качестве альтернативы или дополнения процессор 115 или контроллер 110 может упорядочить выбираемые опции в соответствии с оценочными значениями для функций, соответствующих каждой выбираемой опции. Затем контроллер 110 может определить порядок выбираемых опций, оценочные значения которых выше заранее заданного порогового значения. Например, контроллер 110 может выбирать только опции с оценочным значением, равным или превышающим 0,7. Затем контроллер 110 может установить доступные выбираемые опции с наибольшим оценочным значением на первое место, а другие выбираемые опции с относительно меньшим оценочным значением на второе место и т.д.
В соответствии с одним примером при обнаружении высокой вероятности того, что пользователь собирается припарковать транспортное средство, приоритет отображения функции парковки может быть увеличен и она может быть отображена на интерфейсе 105. Данное решение может быть частично основано на приближении к конечному местоположению, частоте, с которой функция использовалась в конечном местоположении ранее, и текущей скорости движения транспортного средства. Как было сказано выше, функция парковки может включать в себя функцию автоматической парковки, которая может быть использована для параллельной парковки транспортного средства. Функция парковки также может включать в себя систему/функцию обычной парковки, в которой изображение с камер заднего вида будет передаваться на интерфейс 105 или другой экран, на который смотрит пользователь, что делает парковку транспортного средства более простой. Функция автоматической парковки и функция обычной парковки могут быть проанализированы и могут получить оценочные значения, не зависящие друг от друга. В результате одна выбираемая опция, соответствующая одной из функций парковки, будет отображена на интерфейсе 105, а другая - нет. Однако при некоторых условиях движения могут быть отображены обе выбираемые опции.
На этапах 1010-1030 данный цикл может выполняться непрерывно до тех пор, пока транспортное средство продолжает работать. Стандартные датчики 135, 140 и ситуативные модули 120, 125 непрерывно работают, передавая информацию на процессор 115, который непрерывно генерирует новые оценочные значения функции, соответствующие доступным выбираемым опциям (например, значения, соответствующие функциям парковки), таким образом, чтобы соответствующие функции были доступны и отображались на интерфейсе 105.
Соответственно, в настоящем документе описана система интерфейса, позволяющая определить вероятность того, что функция транспортного средства будет выбрана водителем, и отобразить данную функцию на интерфейсе. Анализ выбираемых функций с точки зрения текущих условий позволяет интерфейсу учитывать индивидуальные особенности пользователя, а также увеличить частоту использования разных функций за счет отображения выбираемых функций в нужное время. Кроме того, система позволяет повысить уровень безопасности вождения и меньше отвлекает водителя.
Вычислительные устройства включают в себя машиночитаемые инструкции, при этом данные инструкции могут быть выполнены одним или несколькими вычислительными устройствами, например, вычислительными устройствами, перечисленными выше. Машиночитаемые инструкции могут быть скомпилированы или транслированы из компьютерных программ, созданных с использованием различных языков и (или) технологий программирования, включая, но не ограничиваясь этим, языки Java, С, С++, Visual Basic, Java Script, Perl и т.д. или их комбинации. В общем случае процессор (например, микропроцессор) принимает инструкции, например, от запоминающего устройства или машиночитаемого носителя и т.д., и выполняет эти инструкции, тем самым, реализуя один или несколько процессов, к которым относится один или несколько процессов из настоящего описания. Такие инструкции и другие данные могут храниться и передаваться с помощью различных машиночитаемых носителей.
Машиночитаемый носитель (сюда также относятся носители, читаемые процессором) может представлять собой любой энергонезависимый носитель (например, материальный носитель), предоставляющий данные (например, инструкции), которые могут быть обработаны компьютером (например, процессором компьютера). Такой носитель может иметь множество форм, включая, но не ограничиваясь этим, постоянные и оперативные запоминающие устройства. Постоянными запоминающими устройствами могут быть, например, оптические или магнитные диски, а также другие виды энергонезависимых носителей. Оперативные запоминающие устройства могут представлять собой, например, динамическое оперативное запоминающее устройство (DRAM), которые обычно являются частью основным запоминающим устройством. Такие инструкции могут быть переданы с помощью одного или нескольких средств передачи данных, например, с помощью коаксиальных кабелей, медных кабелей и оптоволоконных кабелей, включающих в себя провода, которые являются частью системной шины, соединенной с процессором компьютера. Стандартными формами машиночитаемых носителей являются гибкий магнитный диск, жесткий диск, магнитная лента, любые другие виды магнитных носителей, CD-ROM, DVD, любые другие оптические носители, перфорированная лента, бумажная лента, любые другие физические носители информации с отверстиями, RAM, PROM, EPROM, FLASH-EEPROM, другие чипы или карты памяти, а также любые другие носители, с которыми может работать компьютер.
Базы данных, архивы или другие описанные хранилища данных могут включать в себя различные механизмы для хранения, доступа и чтения различных данных, например, иерархические базы данных, наборы файлов в файловой системе, базы данных приложения в соответствующем формате, реляционные системы управления базами данных (RDBMS) и т.д. Каждое такое хранилище данных обычно встроено в вычислительное устройство с операционной системой, например, в одну из указанных выше систем, а доступ к ним осуществляется через сеть одним или несколькими любыми из существующих способов. Доступ к файловой системе может быть выполнен из операционной системы, при этом такая система может поддерживать различные форматы файлов. RDBMS обычно использует язык структурированных запросов (SQL) вместе с языком создания, хранения, редактирования и выполнения сохраненных процедур, например, PL/SQL.
В некоторых вариантах осуществления изобретения элементы системы могут представлять собой машиночитаемые инструкции (например, программное обеспечение) на одном или нескольких компьютерных устройствах (например, серверах, персональных компьютерах и т.д.) и могут храниться на соответствующем машиночитаемом носителе (например, дисках, запоминающих устройствах и т.д.). Компьютерная программа может состоять из таких инструкций, сохраненных на машиночитаемом носителе, для выполнения описанных функций.
Что касается описанных в данном документе процессов, систем, способов, эвристических алгоритмов и т.д., следует понимать, что, несмотря на обозначенную последовательность этапов, такие процессы могут быть выполнены с использованием другой последовательности данных этапов. Также следует понимать, что некоторые этапы могут быть выполнены одновременно, а некоторые этапы могут быть добавлены или исключены. Другими словами, описания процессов представлены лишь в качестве примера вариантов осуществления изобретения и не могут рассматриваться как ограничение формулы изобретения.
Таким образом, следует понимать, что описание приведено выше в целях наглядности, а не ограничения. Многие варианты осуществления и способы применения, отличные от указанных примеров, станут очевидными после ознакомления с вышеприведенным описанием. Объем изобретения должен определяться не на основании приведенного выше описания, а на основании прилагаемой формулы изобретения вместе со всеми эквивалентами, указанными в данной формуле изобретения. Можно предположить и ожидать будущего развития технологий, упомянутых в данном описании изобретения, а также того, что раскрытые системы и способы будут включены в подобные будущие варианты осуществления изобретения. Таким образом, следует понимать, что применение изобретения может быть изменено и скорректировано.
Все термины, используемые в формуле изобретения, следует понимать в их наиболее широких разумных толкованиях и их обычных значениях, как это понимают специалисты в области технологий, упоминаемых в данном описании изобретения, если иное явно не указано в настоящем документе. В частности, слова «первый», «второй» и т.д. могут быть взаимозаменяемыми.
Реферат
Изобретение относится к системе интерфейса транспортного средства, в частности к прогнозированию использования ситуативного интерфейса транспортного средства. Технический результат заключается в обеспечении гибкой системы отображения функций транспортного средства пользователю для предотвращения отвлечения водителя во время управления транспортным средством на ненужные опции. Такой результат достигается за счет того, что система интерфейса транспортного средства включает в себя интерфейс, выполненный с возможностью отображать иконки, обозначающие выбираемые функции транспортного средства, а также контроллер, запрограммированный генерировать оценочное значение для каждой из функций на основании ситуативной переменной, включающей в себя местоположение транспортного средства, и/или скорость транспортного средства, и/или информацию о предыдущем использовании функции, и/или прогнозированное конечное местоположение транспортного средства, а также отображать одни иконки и скрывать другие иконки на основании сгенерированных оценочных значений. 2 н. и 7 з.п. ф-лы, 14 ил.
Формула

Документы, цитированные в отчёте о поиске
Интерфейс пользователя с упреждающим действием
Комментарии