Устройство с прямым управлением, в частности с пропорциональным и/или линейным управлением, для системы погрузки и/или разгрузки жидкости - RU2488547C2
Код документа: RU2488547C2
Чертежи


Описание
Область техники
Настоящее изобретение, в общем, относится к системам для погрузки и/или разгрузки текучих сред для судов, обычно называемым морскими системами погрузки. Эти системы используются для перекачки жидкого или газообразного продукта между судном и причалом или между двумя судами.
В частности, настоящее изобретение относится к устройству для управления перемещением и позиционированием таких систем погрузки и/или разгрузки.
Предшествующий уровень техники
Как правило, морские системы погрузки имеют конец линии перекачки жидкости, прикрепленный к основанию и подключенный к резервуару с перекачиваемой текучей средой, и противоположный конец линии, который является подвижным и снабжен соединительной муфтой, предназначенной для подключения к целевому трубопроводу, непосредственно подключенному к резервуару с жидкостью.
Известны две группы систем погрузки жидкости для судов, отличающихся по своей конструкции: системы для перекачки по жестким трубам и системы для перекачки по гибким трубам.
В группе систем для перекачки по жестким трубам можно выделить системы с погрузочным рукавом и пантографические системы.
Погрузочный рукав представляет собой систему шарнирно-сочлененных труб, имеющую основание, подключенное к резервуару с жидкостью, на котором установлена первая труба, образующая внутреннюю трубу, причем эта первая труба установлена посредством колена с углом изгиба 90°, обеспечивающего возможность поворота одного из концов первой трубы вокруг вертикальной оси, а другого конца - вокруг горизонтальной оси. На противоположном конце внутренней трубы установлена вторая труба, образующая внешнюю трубу, причем эта вторая труба установлена с возможностью поворота вокруг горизонтальной оси. На конце внешней трубы установлена соединительная муфта.
Управление каждым из этих трех поворотных движений осуществляется силовым цилиндром или гидромотором с двухпозиционным управлением. Оператор имеет интерфейс команд, обеспечивающий возможность независимого управления каждым из перемещений.
Пантографические системы, как и погрузочные рукава, имеют основание, подключенное к резервуару. На этом основании с возможностью поворота установлен подъемный кран. Подъемный кран имеет грузовую стрелу, перемещающую трубу для текучей среды. На конце грузовой стрелы установлен пантограф, состоящий из шарнирно-сочлененных труб для текучей среды и обеспечивающий возможность перемещения соединительной муфты, установленной на свободном конце пантографа. Угол наклона пантографа регулируется путем поворота конца грузовой стрелы. Управление перемещением пантографа осуществляется с помощью гидромоторов и силового цилиндра, предназначенного для поворота на основании.
И наконец, системы гибких трубопроводов, как правило, имеют линию для перекачки жидкого продукта и механическую систему, обеспечивающую возможность маневрирования линией. Существует несколько типов систем маневрирования, но во всех случаях они включают в себя подъемный кран-манипулятор или конструкцию, поддерживающую соединительную муфту для подключения гибкого трубопровода.
На практике в большинстве систем соединительная муфта имеет на своем конце шарнирное сочленение, допускающее совершение трех свободных поворотных движений и обеспечивающее оператору возможность точного ручного управления в случае наличия соединительной муфты для подключения к целевому трубопроводу.
Эти две группы устройств погрузки отличаются по конструкции, но их системы управления разработаны по одному и тому же общему принципу. При этом, во всех случаях, соединительная муфта имеет, по меньшей мере, три степени свободы относительно основания, поддерживающего неподвижный конец трубопровода, а независимое управление перемещениями, соответствующими каждой из этих степеней свободы, обеспечивают исполнительные механизмы.
Управление каждым исполнительным механизмом осуществляется с помощью независимого органа управления двухпозиционного типа. Оператор может по отдельности обращаться к каждому из органов управления с целью управления конкретным элементом системы погрузки. Комбинированное воздействие на группу исполнительных механизмов обеспечивает возможность позиционирования соединительной муфты в целевой точке пространства.
Как правило, используемые исполнительные механизмы являются гидравлическими и представляют собой, например, гидромотор или силовой цилиндр, но известны и электрические исполнительные механизмы, например, электромоторы или пневматические исполнительные механизмы. Во всех случаях управление исполнительными механизмами, которыми снабжены морские системы погрузки, осуществляется с помощью двухпозиционных органов управления с постоянной скоростью перемещения и в некоторых случаях с возможностью задания двух скоростей перемещения по усмотрению.
На практике внедрение этих устройств управления связано с определенными трудностями, заключающимися в том, что оператор должен в совершенстве знать кинематические узлы морской системы погрузки и обеспечивать одновременное комбинирование независимого перемещения каждого из исполнительных механизмов с целью получения в результате суммирования всех перемещений комбинированного перемещения соединительной муфты, соответствующего требуемому перемещению. Поскольку исполнительные механизмы с двухпозиционным управлением обеспечивают перемещения с постоянной скоростью, то оператору трудно или даже невозможно обеспечивать перемещение соединительной муфты, являющееся линейным и/или совершаемое с постоянной скоростью. В общем, оператору трудно осуществлять точное управление перемещением соединительной муфты, что повышает вероятность соударений соединительной муфты с препятствием или с целевым трубопроводом и может приводить к повреждению уплотнений соединительной муфты.
Краткое изложение существа изобретения
Задачей настоящего изобретения является облегчение выполнения оператором процесса управления перемещением соединительной муфты путем повышения его интуитивности для обеспечения подключения соединительной муфты в неблагоприятных морских условиях и, в общем, облегчения подключения и выполнения его с более высокой скоростью во всех случаях при снижении вероятности соударений соединительной муфты, которые могут, в частности, приводить к повреждению уплотнений.
Для реализации поставленной задачи согласно изобретению предлагается устройство управления для перемещения и позиционирования соединительной муфты для морской системы погрузки, где указанная морская система погрузки содержит, по меньшей мере, одну линию перекачки жидкости, имеющую конец линии, прикрепленный к основанию, и подвижный конец линии, снабженный соединительной муфтой, предназначенной для подключения к целевому трубопроводу, причем система дополнительно имеет несколько механических соединений, обеспечивающих, по меньшей мере, три степени свободы соединительной муфты относительно основания, при этом устройство характеризуется тем, что содержит, по меньшей мере, три исполнительных механизма пропорционального управления, каждый из которых предназначен для пропорционального управления перемещением системы, соответствующим степени свободы, датчик положения в составе системы, отслеживающий каждую степень свободы, операторский интерфейс ввода для ввода команд перемещения соединительной муфты и вычислительное устройство для вычисления текущего положения соединительной муфты по информации, поступающей от датчиков, и для вычисления одновременных команд управления, подаваемых на каждый из исполнительных механизмов с целью обеспечения их комбинированного перемещения, вызывающего перемещение соединительной муфты, соответствующее команде перемещения, подаваемой оператором с интерфейса ввода, причем вычисление осуществляется по сигналам ввода команд перемещения, поступающим с интерфейса ввода.
В предпочтительном варианте воплощения изобретения это устройство обеспечивает оператору возможность интуитивного управления перемещением соединительной муфты без необходимости введения поправок на ее перемещение путем одновременного воздействия на органы управления. Другими словами, устройство согласно изобретению позволяет пользователю осуществлять прямое управление перемещением соединительной муфты без необходимости знания кинематических узлов системы погрузки. С помощью устройства согласно изобретению оператору не требуется комбинировать перемещения кинематических узлов путем одновременного воздействия на несколько органов управления, так как эти операции выполняются с помощью вычислительного устройства. Оператор может, таким образом, осуществлять прямое управление перемещением соединительной муфты и может, таким образом, в частности, обеспечивать перемещение соединительной муфты, являющееся линейным и/или совершаемое с постоянной скоростью.
В предпочтительном варианте изобретение предназначено для использования применительно к морской системе погрузки любого типа, т.е. как к системам для перекачки по жестким трубам, так и к системам для перекачки по гибким трубам.
Согласно предпочтительному признаку изобретения операторский интерфейс ввода имеет, по меньшей мере, один орган пропорционального управления, в результате воздействия на который с большей или меньшей величиной вырабатывается, по меньшей мере, одна команда пропорционального управления соответственно большей или меньшей величины для, по меньшей мере, одного из исполнительных механизмов, обеспечивающая перемещение соединительной муфты соответственно с более высокой или более низкой скоростью перемещения.
В предпочтительном варианте изобретения каждый из органов управления является органом управления пропорционального типа, что на практике означает, что амплитуда их перемещения определяет более высокую или более низкую скорость перемещения исполнительных механизмов.
Согласно предпочтительным признакам, которые могут быть объединены:
по меньшей мере, один из датчиков положения в составе системы является датчиком угла поворота;
по меньшей мере, один из исполнительных механизмов пропорционального управления представляет собой гидравлический исполнительный механизм, взаимодействующий с вентилем пропорционального управления;
по меньшей мере, один из исполнительных механизмов пропорционального управления представляет собой электромотор пропорционального управления;
связь между операторским интерфейсом ввода и вычислительным устройством является беспроводной и интерфейс ввода подключен к передатчику, имеющему беспроводную связь с приемником, подключенным к вычислительному устройству;
операторский интерфейс ввода имеет, по меньшей мере, один манипулятор, предназначенный для подачи команды перемещения соединительной муфты, соответствующего, по меньшей мере, двум из трех степеней свободы;
несколько морских систем погрузки подключены к вычислительному устройству, и операторский интерфейс ввода снабжен переключателем для выборочного управления одной из систем погрузки, соединенной с вычислительным устройством.
Другим объектом изобретения является система автоматического управления для описываемого выше устройства, содержащая устройства ввода для приема сигналов положения, вырабатываемых датчиком положения в составе системы, соответствующих каждой степени свободы, и для приема сигналов управления от операторского интерфейса ввода для ввода команд перемещения соединительной муфты и предназначенная для вычисления одновременных команд управления, осуществляемого на основе сигналов ввода, где одновременные команды управления поступают на каждый из исполнительных механизмов для обеспечения их комбинированного перемещения, вызывающего перемещение соединительной муфты, соответствующее команде перемещения, подаваемой оператором с интерфейса ввода, причем указанная система автоматического управления содержит устройства вывода, к которым подключены исполнительные механизмы, и каждая указанная система автоматического управления обеспечивает подачу вычисленных команд управления для исполнительных механизмов на устройства вывода.
Еще одним объектом изобретения является способ вычисления для описываемой выше системы автоматического управления, содержащий следующие этапы вычисления:
вычисления пространственных координат положения соединительной муфты относительно точки начала отсчета, определенной предварительно, на основе информации, поступающей от датчиков положения,
вычисления скоростей перемещения, соответствующего, по меньшей мере, трем степеням свободы системы погрузки, на основе сигналов ввода команд, подаваемых оператором с интерфейса команд, и
вычисления выходных команд, подаваемых на каждый из исполнительных механизмов с целью обеспечения управления перемещением системы погрузки в соответствии с сигналами ввода команд, подаваемыми с интерфейса команд, где вычисление осуществляется на основе пространственных координат положения соединительной муфты и требуемых скоростей.
Краткое описание чертежей
Далее изобретение будет поясняться подробным описанием примера осуществления, приводимого ниже в виде неограничивающего примера, со ссылками на прилагаемые чертежи, на которых:
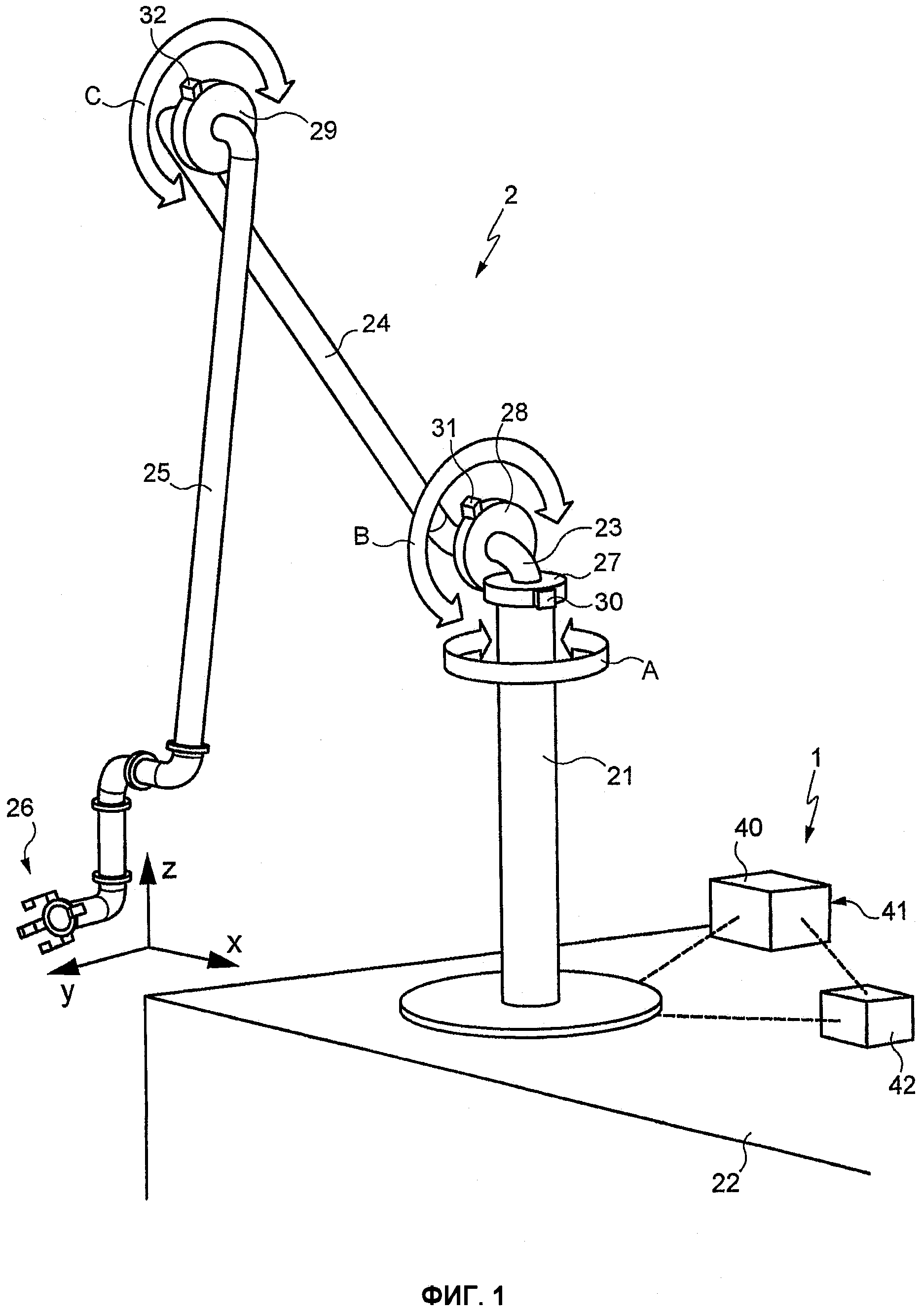
фиг.1 - схематический вид в перспективе погрузочного рукава, снабженного устройством управления, согласно изобретению;
фиг.2 - блок-схема устройства согласно изобретению и, в частности, согласно фиг.1;
фиг.3 - функциональная схема, иллюстрирующая принцип работы устройства управления, согласно фиг.2.
Описание предпочтительного варианта воплощения изобретения
На фиг.1 представлен схематический вид погрузочного рукава 2, снабженного устройством 1 управления согласно изобретению. Погрузочный рукав изображен в крайне упрощенном виде, и при этом следует учитывать, что устройство управления согласно изобретению может быть использовано применительно к морской системе погрузки любого типа и, в частности, к системам погрузки, описываемым выше.
Погрузочный рукав на фиг.1 имеет основание 21, подключенное к резервуару с жидкостью, размещенному ниже поверхности 22, на которой установлено основание и которая может быть, например, причалом или палубой судна. В верхней точке с возможностью поворота с основанием сочленено изогнутое колено 23, с которым, в свою очередь, с возможностью поворота сочленена первая труба, именуемая внутренней трубой 24, сочлененной со стороны своего противоположного конца со второй трубой, именуемой внешней трубой 25. На конце внешней трубы установлена соединительная муфта 26, предназначенная для подключения к целевому трубопроводу (не показан), например, на судне. Известный per se способ крепления обеспечивает три степени свободы поворота соединительной муфты относительно конца внешней трубы. Свобода совершения этих трех поворотных движений позволяет оператору осуществлять свободную коррекцию угла соединительной муфты на заключительной фазе приближения соединительной муфты к целевому трубопроводу при подключении.
Как правило, погрузочный рукав этого типа является известным per se, и его подробное описание в данном документе не приводится. Кроме того, следует отметить, что устройство управления согласно изобретению может быть использовано применительно ко всем морским системам погрузки и, что адаптация устройства управления согласно изобретению применительно к системе погрузки любого другого типа и, в частности, к одной из систем, описываемых выше, не выходит за пределы возможностей специалистов в данной области техники.
В устройстве согласно изобретению, представленном в схематическом виде на фиг.1, исполнительные механизмы 27, 28, 29 установлены на каждом из трех сочленений погрузочного рукава (показаны двойными стрелками A, B, C). В частности, первый исполнительный механизм 27 установлен между верхней точкой основания 21 и изогнутым коленом 23 и предназначен для обеспечения поворота этого колена в горизонтальной плоскости относительно основания, второй исполнительный механизм 28 установлен между концом изогнутого колена 23 и внутренней трубой 24 и предназначен для обеспечения поворота этой внутренней трубы в вертикальной плоскости, а третий исполнительный механизм 29 установлен между внутренней трубой 24 и внешней трубой 25 и предназначен для обеспечения поворота этой внешней трубы в вертикальной плоскости.
Эти три исполнительных механизма 27, 28, 29 представляют собой силовые гидроцилиндры, представленные на фиг.1 в крайне упрощенном виде. Возможен вариант, (не показан), в котором один или более силовых гидроцилиндров заменены гидромоторами. Согласно другому варианту (не показан), исполнительные механизмы являются электро- или пневмомоторами.
В сочленениях между каждым элементом погрузочного рукава установлены датчики 30, 31, 32 угла поворота. Датчик 30 угла поворота установлен между основанием 21 и изогнутым коленом 23, датчик 31 угла поворота установлен между изогнутым коленом 23 и внутренней трубой 24, а датчик 32 угла поворота установлен между внутренней трубой 24 и внешней трубой 25. В предпочтительном варианте изобретения датчики угла поворота установлены непосредственно на исполнительных механизмах, как показано на фиг.2.
В соответствии с предпочтительным вариантом (не показан), датчики 31 и 32 угла поворота заменены маятниковыми датчиками, установленными соответственно на внутреннем и внешнем рукавах и предназначенными для измерения угла их наклона относительно вертикали с помощью маятника.
Каждый из датчиков подключен к одному и тому же управляющему вычислительному устройству 41, которое фактически является системой автоматического управления, размещенной в электрическом шкафе 40 управления.
Для обеспечения исполнительных механизмов гидравлической энергией, необходимой для их работы, устройство снабжено гидравлическим силовым блоком 42. Управление этим блоком осуществляется с помощью системы автоматического управления.
На фиг.2 представлена блок-схема, иллюстрирующая общий принцип работы устройства согласно изобретению, и, в частности, устройства, изображенного на фиг.1.
Как показано на блок-схеме, погрузочный рукав снабжен исполнительными механизмами 27, 28, 29, управление которыми осуществляется с помощью вентилей пропорционального управления. Гидравлический силовой блок 42 обеспечивает исполнительные механизмы гидравлической энергией, необходимой для их работы, через указанные вентили пропорционального управления. Для объединения всех управляющих сигналов, предназначенных для вентилей, устройство снабжено соединительной коробкой (BJ) 51.
Кроме того, рукав с исполнительными механизмами снабжен датчиками 30, 31, 32 угла поворота, подключенными для объединения выходных сигналов датчиков угла поворота к соединительной коробке (BJ) 52.
Электрический шкаф управления имеет взрывобезопасную оболочку 43, которая позволяет защитить содержимое шкафа от возможных случайных взрывов, которые могут происходить поблизости, например, во время перекачки углеводородов через систему погрузки.
Кроме того, система автоматического управления осуществляет управление реле питания для управления включением и выключением гидравлического силового блока. Гидравлический силовой блок содержит насос (не показан), предназначенный для нагнетания гидравлической текучей среды с целью активации гидромоторов или силовых цилиндров.
Возможность управления системой погрузки обеспечивает операторский интерфейс 60 ввода. В иллюстрируемом примере осуществления этот интерфейс представляет собой блок дистанционного управления, снабженный передатчиком 61 для обмена информацией с приемником 62, подключенным к системе автоматического управления в электрическом шкафу управления. Обмен информацией между передатчиком и приемником осуществляется с помощью радиоволн. В варианте изобретения обмен информацией между передатчиком и приемником осуществляется с помощью оптических волн, например, инфракрасных волн.
Согласно варианту изобретения (не показан) операторский интерфейс ввода подключен кабелем к системе автоматического управления, предназначенным для обеспечения обмена информацией с этой системой.
В блоке дистанционного управления (фиг.2), оператор имеет орган управления для перемещения погрузочного рукава по оси “x” и орган управления для перемещения этого рукава по оси “y”, причем эти оси показаны на фиг.1. Органы управления для перемещения по осям “x” и “y” объединены в один элемент манипулирования, выполненные в форме рукоятки 63 управления. Для обеспечения возможности перемещения рукава по оси “z” имеется отдельная рукоятка 64 управления. Каждая из рукояток управления является рукояткой управления пропорционального типа, что на практике означает, что амплитуда перемещения рукоятки управления определяет более высокую или более низкую степень отпирания вентилей пропорционального управления и, следовательно, более высокую или более низкую скорость перемещения исполнительных механизмов.
В варианте изобретения (не показан) органы управления для перемещения по осям “x” и “z” объединены один с другим в одну рукоятку управления. Для обеспечения возможности перемещения рукава по оси “y” имеется отдельная рукоятка. Следует отметить, что и другие комбинации органов управления при их объединении одного с другим очевидны для специалистов в данной области техники.
В другом варианте изобретения (не показан) органы управления для перемещения по осям “x”, “y” и “z” объединены один с другими в один манипулятор.
В варианте изобретения (не показан) система автоматического управления осуществляет управление несколькими рукавами. Блок дистанционного управления снабжен переключателем, обеспечивающим возможность управления несколькими погрузочными рукавами, подключенными к одной и той же системе автоматического управления, на основе одного и того принципа и с помощью одних и тех же рукояток управления.
На фиг.3 представлена функциональная схема, иллюстрирующая принцип работы устройства управления согласно изобретению и, в частности, согласно фиг. 1 и 2.
Три выходных сигнала, вырабатываемых датчиками 30, 31, 32 угла поворота, размещенными в каждой из трех сочленений погрузочного рукава, передаются в систему автоматического управления. На основе данных о величинах углов поворота система автоматического управления вычисляет пространственные координаты (по осям x, y и Z) положения соединительной муфты относительно точки начала отсчета, определенной предварительно.
Параллельно на основе сигналов ввода команд, подаваемых с интерфейса команд (с блока дистанционного управления), система автоматического управления вычисляет требуемые скорости Vx, Vy и Vz по осям x, y и z.
На основе пространственных координат положения соединительной муфты и требуемых скоростей система автоматического управления вычисляет будущие необходимые углы поворота в этих трех сочленениях для обеспечения перемещения, требуемого потребителю.
При этом система автоматического управления вычисляет перемещение каждого из исполнительных механизмов 27, 28, 29, требуемого для обеспечения угла поворота, полученного в результате вычисления, и затем вычисляет выходные команды, подаваемые на каждый из исполнительных механизмов с целью обеспечения управления перемещением погрузочного рукава в соответствии с сигналами ввода команд, подаваемыми оператором.
Фактически система автоматического управления вычисляет пространственные координаты соединительной муфты 26 в каждый момент времени и при обращении пользователя к операторскому интерфейсу 60 ввода вычисляет будущие необходимые углы.
В варианте изобретения (не показан) использование известного per se способа крепления позволяет оснастить устройство управления согласно изобретению четвертым исполнительным механизмом, обеспечивающим возможность блокирования или разблокирования соединительной муфты.
В зависимости от обстоятельств возможны различные другие варианты изобретения, и при этом следует учитывать, что это изобретение не ограничивается вышеприведенными примерами, описываемыми со ссылками на чертежи.
Реферат
Изобретение относится к устройству управления для перемещения и позиционирования соединительной муфты для морской системы погрузки. Система погрузки содержит линию перекачки жидкости, имеющую конец линии, прикрепленный к основанию, и подвижный конец линии с соединительной муфтой для подключения к целевому трубопроводу. Система имеет несколько механических соединений, обеспечивающих три степени свободы соединительной муфты относительно основания, и три исполнительных механизма пропорционального управления для пропорционального управления перемещением системы, соответствующим степени свободы. Три датчика положения предназначены для каждой степени свободы системы. В систему включен интерфейс для ввода команд перемещения соединительной муфты и вычислительное устройство для вычисления текущего положения соединительной муфты по информации, поступающей от датчиков, и для вычисления, из сигналов ввода команд перемещения, поступающих с интерфейса, одновременных команд управления, подаваемых на каждый из исполнительных механизмов. Таким образом, обеспечивается комбинированное перемещение исполнительных механизмов, вызывающее точное перемещение соединительной муфты, соответствующее команде с операторского интерфейса ввода. 2 н. и 7 з.п. ф-лы, 3 ил.
Комментарии